




Modeling and Flight Simulation of a Tilt-deformable Quadrotor
-
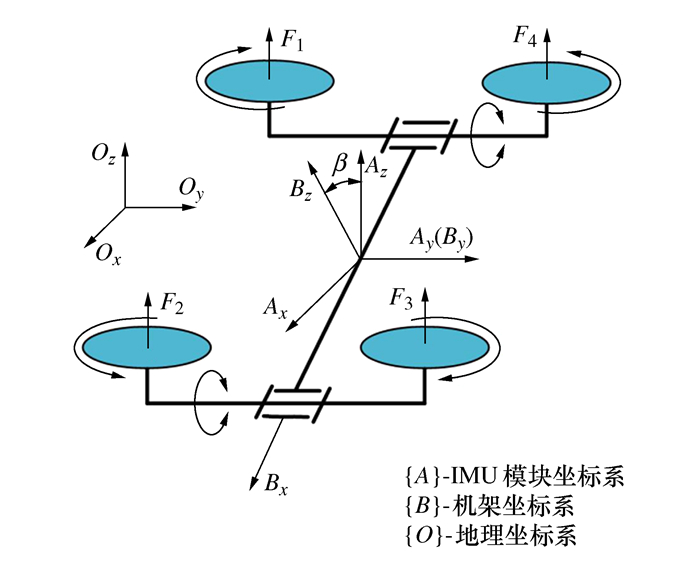
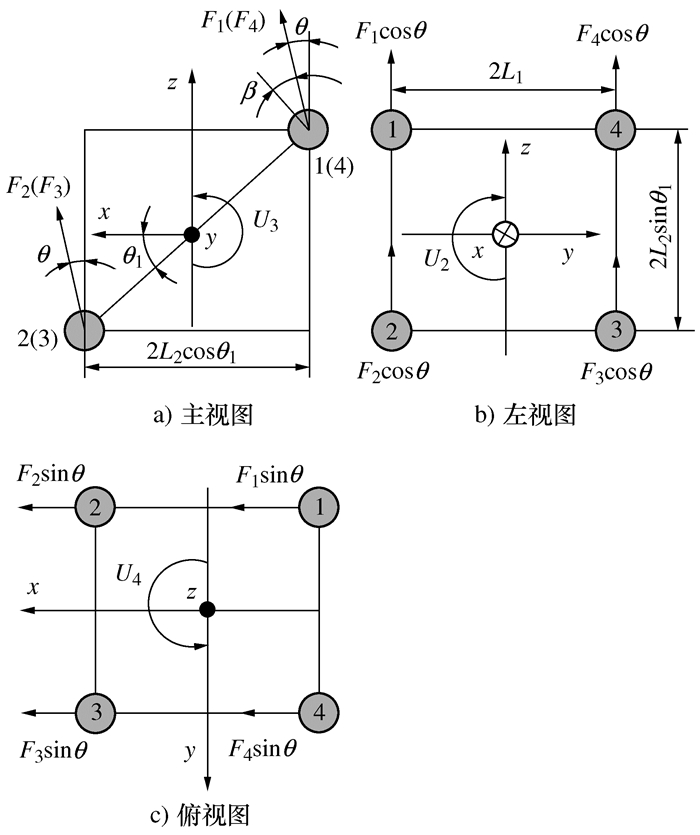
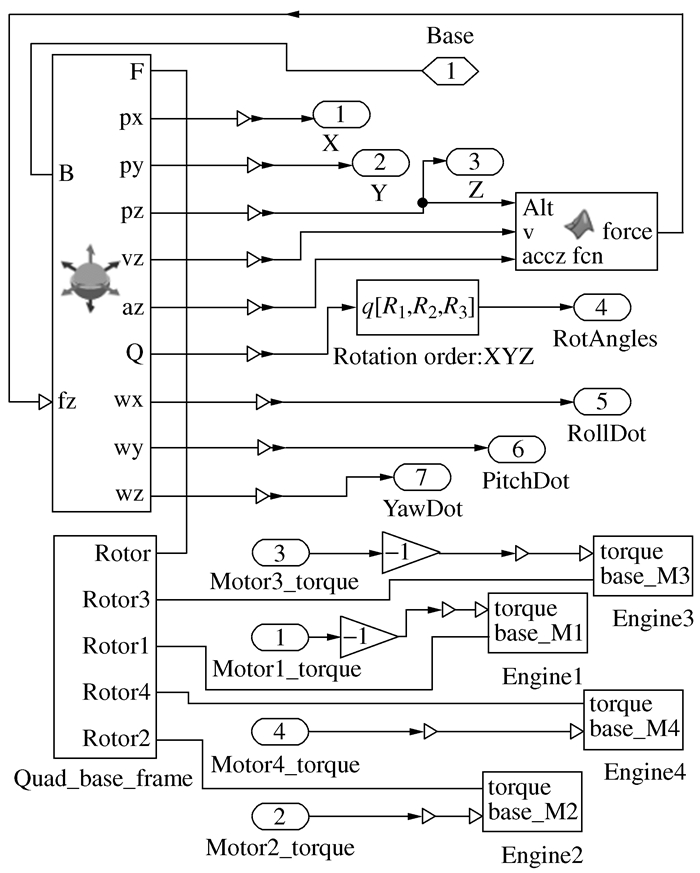
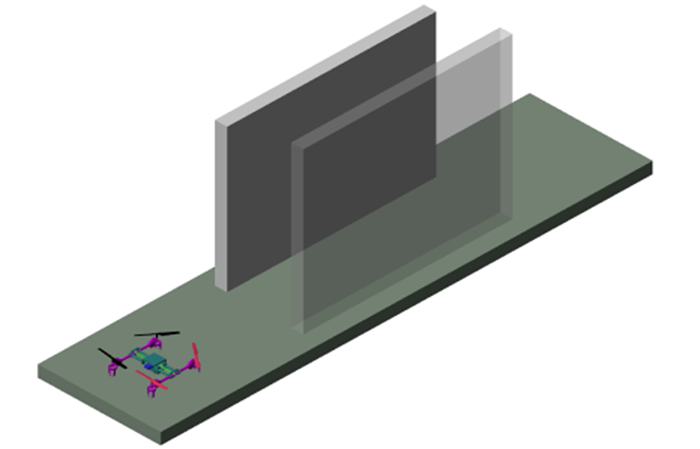
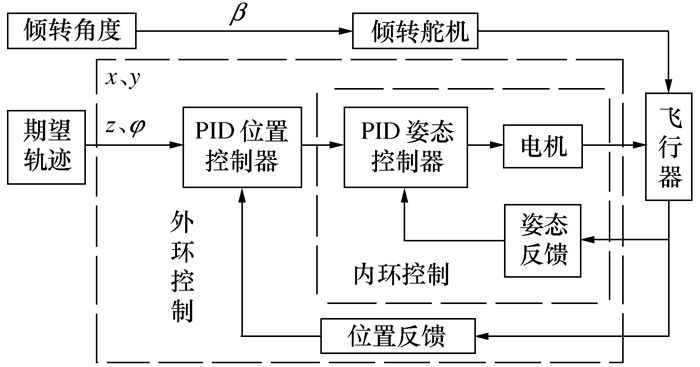
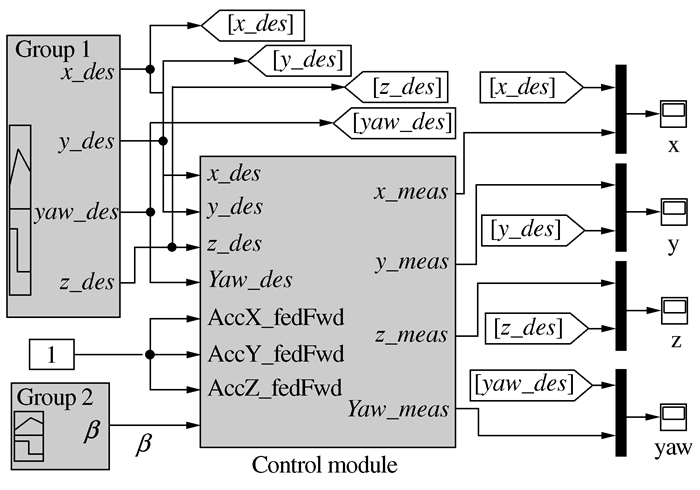
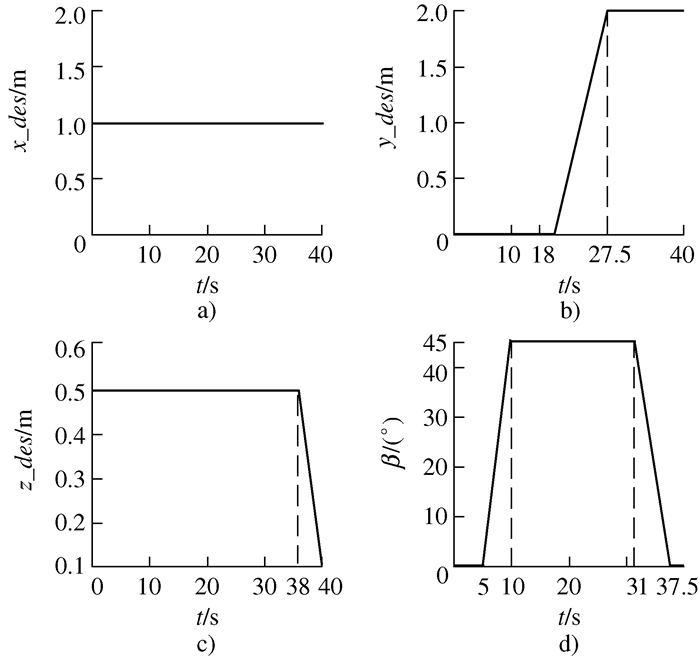
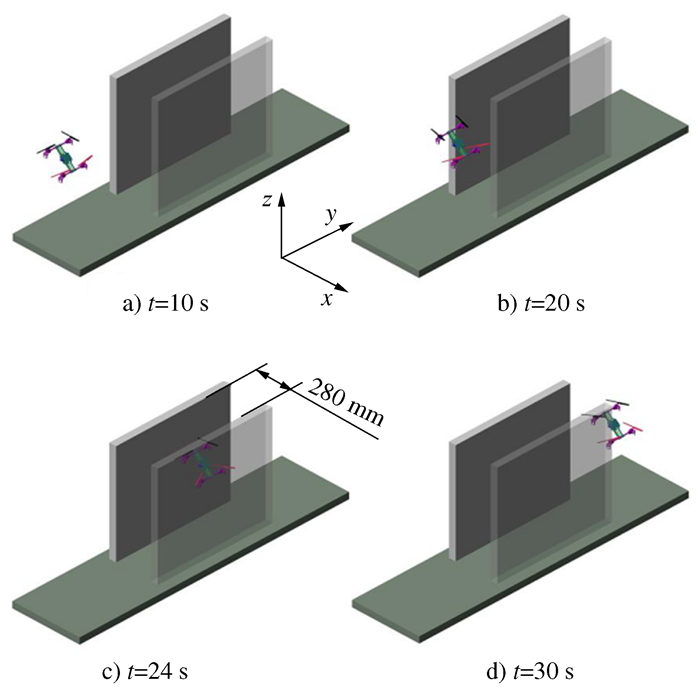
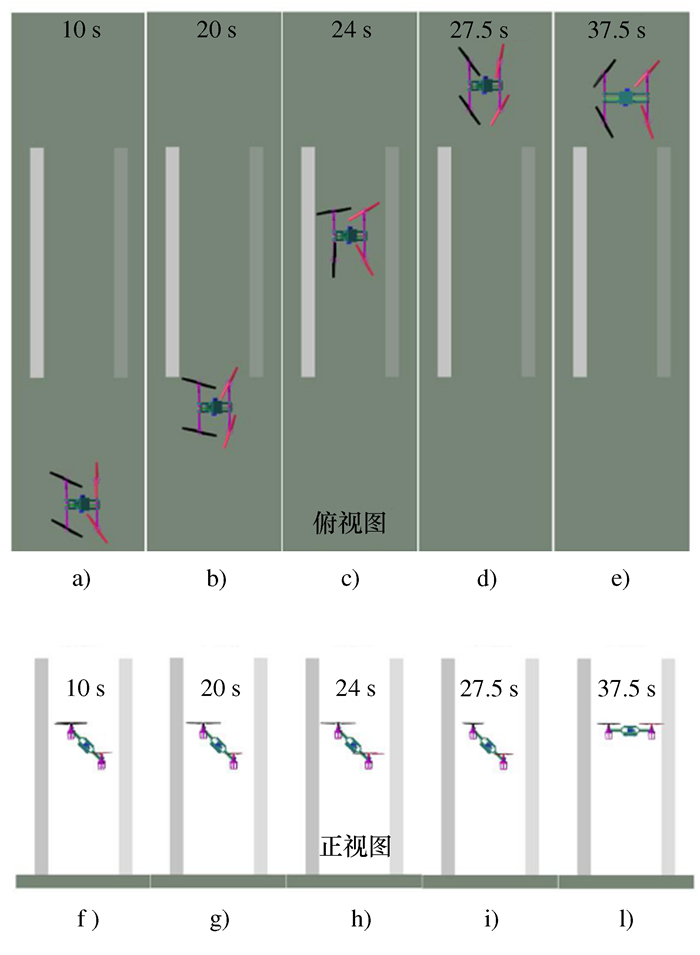
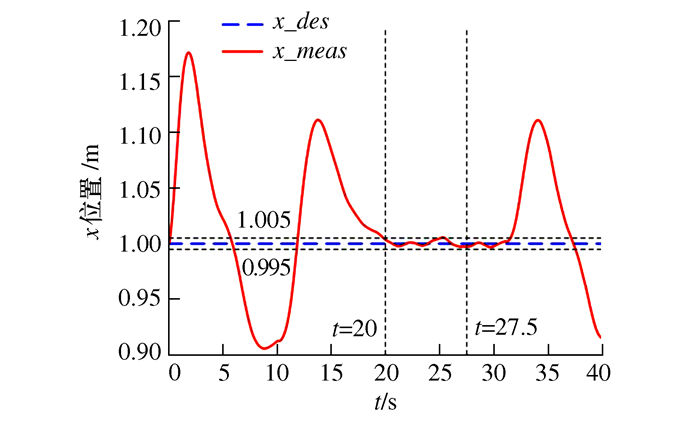
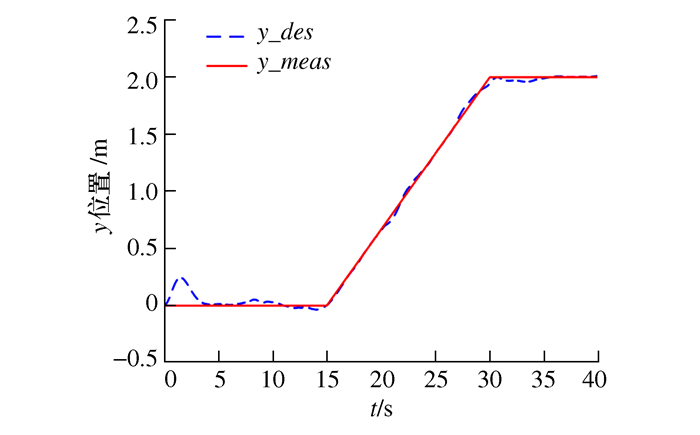
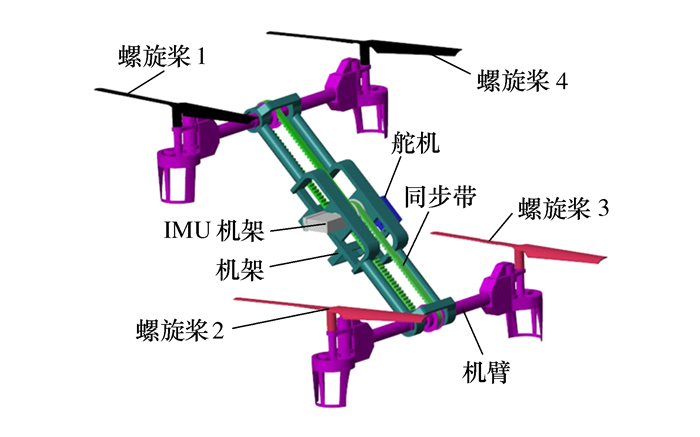
摘要: 为了提高四旋翼飞行器在地震灾难现场等内部狭窄空间中的通过性,提出了一种新型的螺旋桨可倾转的四旋翼飞行器。该四旋翼飞行器在传统四旋翼飞行器基础上增加了一个倾转自由度,实现四个螺旋桨同步、同向倾转,进而可以改变飞行器构型来适应狭窄飞行空间。建立了倾转变形四旋翼飞行器动力学数学模型,在Simulink/SimMechanics仿真环境中搭建了四旋翼飞行器动力学模型,设计了串级PID控制器,实现了四旋翼飞行器在倾转状态下稳定飞行,分析了飞行器穿越狭窄空间的飞行动作及轨迹跟踪情况。仿真结果表明倾转变形四旋翼飞行器构型设计和仿真系统是可行的。
-
关键词:
- 四旋翼飞行器 /
- 倾转变形 /
- SimMechanics /
- 建模与仿真 /
- 狭窄空间飞行
Abstract: In order to improve the passage of the quadrotor in the internal narrow space such as the earthquake disaster site, a new type of rotor-tilted quadrotor is proposed in this paper. Compared with the traditional quadrotors, an additional tilting degree of freedom is added in this quadrotor, enabling the four propellers synchronously to tilt in the same direction, and the configuration of the quadrotor can be changed to adapt to the narrow space. A dynamic mathematical model of the tilt-deformable quadrotor is established. In the Simulink/SimMechanics simulation environment, a flight dynamics model of the quadrotor is built, and the cascade PID controller is designed, and the quadrotor can hover and fly in the tilting state, the flight motion and the trajectory tracking of the quadrotor through a narrow space are analyzed. The simulation results show that the configuration design and simulation system of the tilt-deformable quadrotor are feasible.-
Key words:
- quadrotor /
- tilt-deformable /
- SimMechanics /
- modeling and simulation /
- narrow space flight
-
[1] Falanga D, Kleber K, Mintchev S, et al. The foldable drone:a morphing quadrotor that can squeeze and fly[J]. IEEE Robotics and Automation Letters, 2019, 4(2):209-216 [2] Zhao N, Luo Y D, Deng H B, et al. The deformable quad-rotor: design, kinematics and dynamics characterization, and flight performance validation[C]//Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017: 2391-2396 [3] Desbiez A, Expert F, Boyron M, et al. X-Morf: a crash-separable quadrotor that morfs its X-geometry in flight[C]//Proceedings of 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS). Linkoping, Sweden: IEEE, 2017: 222-227 [4] Riviere V, Manecy A, Viollet S. Agile robotic fliers:a morphing-based approach[J]. Soft Robotics, 2018, 5(5):541-553 doi: 10.1089/soro.2017.0120 [5] Ryll M, Bülthoff H H, Giordano P R. Modeling and control of a quadrotor UAV with tilting propellers[C]//Proceedings of 2012 IEEE International Conference on Robotics and Automation. Saint Paul, USA: IEEE, 2012: 4606-4613 [6] Ryll M, Bülthoff H H, Giordano P R. A novel overactuated quadrotor Unmanned Aerial Vehicle:modeling, control, and experimental validation[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2):540-556 doi: 10.1109/TCST.2014.2330999 [7] Oosedo A, Abiko S, Narasaki S, et al. Flight control systems of a quad tilt rotor unmanned aerial vehicle for a large attitude change[C]//Proceedings of 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, USA: IEEE, 2015: 2326-2331 [8] Oosedo A, Abiko S, Narasaki S, et al. Large attitude change flight of a quad tilt rotor unmanned aerial vehicle[J]. Advanced Robotics, 2016, 30(5):326-337 doi: 10.1080/01691864.2015.1134344 [9] Ji R H, Ma J. Mathematical modeling and analysis of a quadrotor with tilting propellers[C]//Proceedings of 201837th Chinese Control Conference (CCC). Wuhan, China: IEEE, 2018: 1718-1722 [10] Gerber M J, Tsao T C. Twisting and tilting rotors for high-efficiency, thrust-vectored quadrotors[J]. Journal of Mechanisms and Robotics, 2018, 10(6):061013 doi: 10.1115/1.4041261 [11] Junaid A B, De Cerio Sanchez A D, Bosch J B, et al. Design and implementation of a dual-axis tilting quadcopter[J]. Robotics, 2018, 7(4):65 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=MDPI000000196898 [12] Kawasaki K, Motegi Y, Zhao M J, et al. Dual connected bi-copter with new wall trace locomotion feasibility that can fly at arbitrary tilt angle[C]//Proceedings of 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE, 2015: 524-531 [13] Myeong W, Myung H. Development of a wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism[J]. IEEE Access, 2018, 7:4868-4879 [14] Fukuda T, Sakaguchi A, Takimoto T, et al. Modeling and stabilization of the novel quadcopter with tilting propeller[C]//Proceedings of 2016 International Symposium on Nonlinear Theory and Its Applications. Yugawara, Japan: IEICE, 2016: 173-176 [15] 鲁麟宏, 付荣, 王勇, 等.基于矫正广义走廊的电动倾转旋翼机模态转换[J].航空学报, 2018, 39(8):41-52 http://d.old.wanfangdata.com.cn/Periodical/hkxb201808004Lu L H, Fu R, Wang Y, et al. Mode conversion of electric tilt rotor aircraft based on corrected generalized corridor[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(8):41-52(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hkxb201808004 [16] 张练, 孙凯军, 叶川, 等.新构型倾转旋翼无人机飞行力学建模[J].航空工程进展, 2019, 10(4):462-470 http://d.old.wanfangdata.com.cn/Periodical/hkgcjz201904005Zhang L, Sun K J, Ye C, et al. Flight mechanics modeling of the new configuration tilt-rotor[J]. Advances in Aeronautical Science and Engineering, 2019, 10(4):462-470(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hkgcjz201904005 -

 下载:
下载:

 点击查看大图
点击查看大图
图(13)
计量
- 文章访问数: 349
- HTML全文浏览量: 154
- PDF下载量: 42
- 被引次数: 0
