作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2020年 39卷 第1期
2020, 39(1): 1-9.
doi: 10.13433/j.cnki.1003-8728.20190073
 摘要
摘要 HTML
HTML PDF 1229KB
PDF 1229KB
摘要:
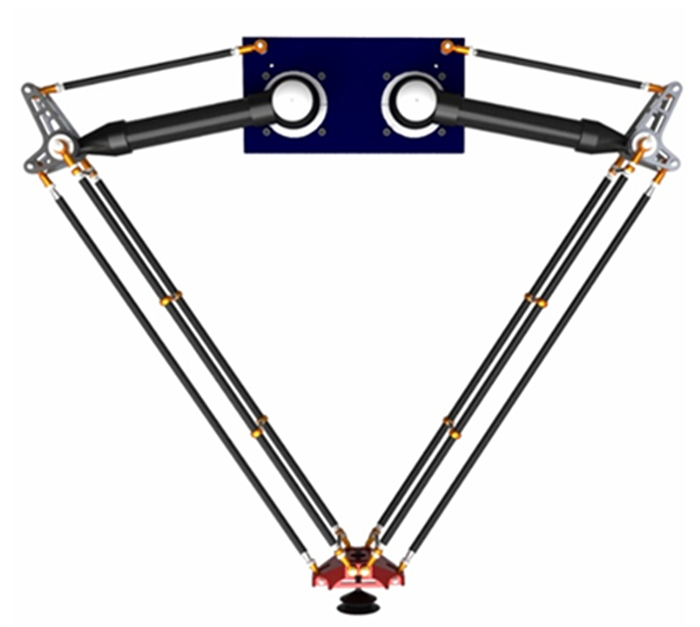
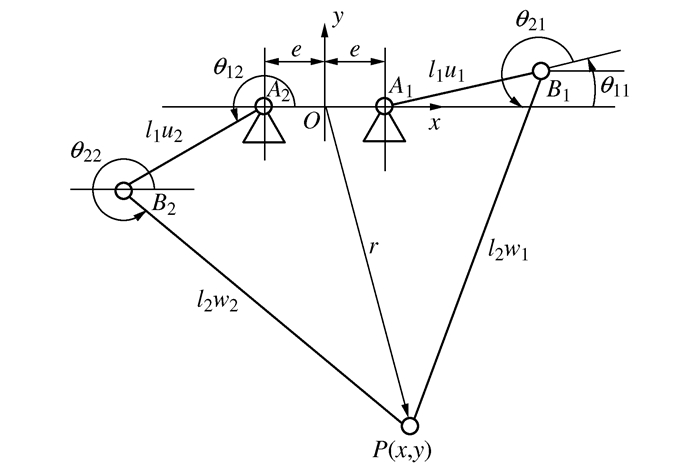
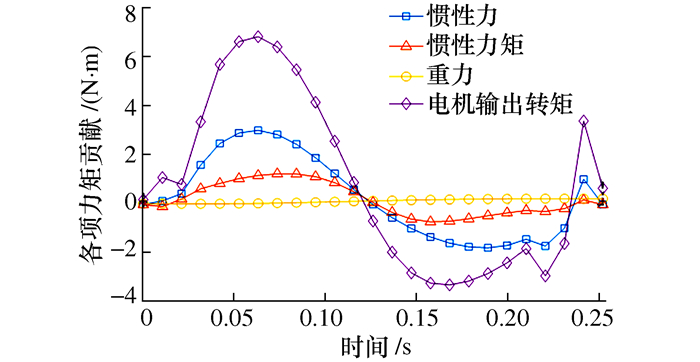
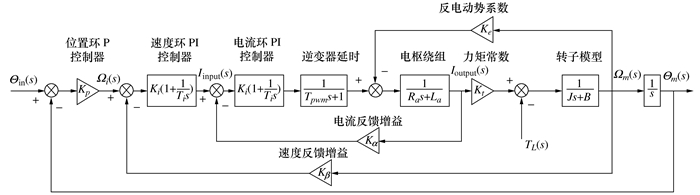
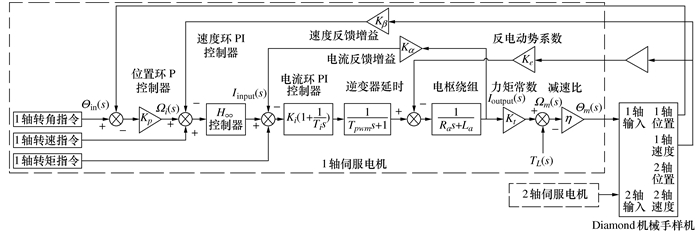
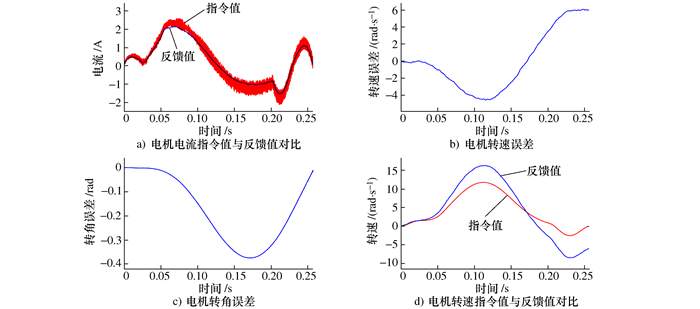
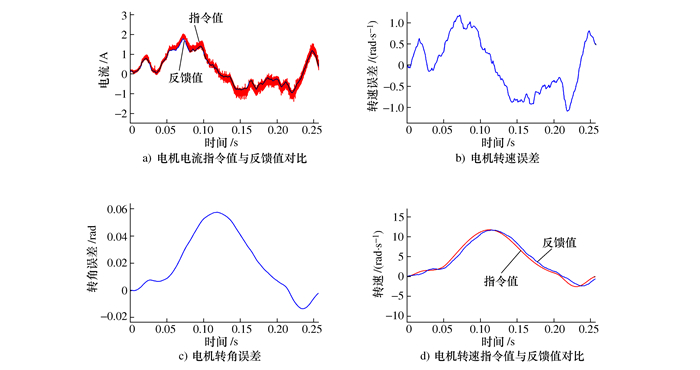
本文针对一种二自由度并联机械手高速运动状态下的动力学控制方法展开研究。通过对并联机械手简化刚体动力学模型的建模误差进行溯源分析,提出了一种基于双系数补偿分配策略的建模方法,对机械手的简化刚体动力学模型进行了优化,并基于该简化模型建立了机械手的动力学前馈控制方法。为进一步提高控制过程的鲁棒性,结合H∞控制方法提出了一种H∞+动力学前馈的控制方法。在建立机械手整机机电联合仿真系统的基础上,对所提出的两种控制方法进行了详细的仿真和对比。仿真结果表明,本文提出的控制方法可以减少力矩扰动对伺服电机输出带来的影响,大大减小了机械手末端的定位误差,提高了机械手的控制精度。
本文针对一种二自由度并联机械手高速运动状态下的动力学控制方法展开研究。通过对并联机械手简化刚体动力学模型的建模误差进行溯源分析,提出了一种基于双系数补偿分配策略的建模方法,对机械手的简化刚体动力学模型进行了优化,并基于该简化模型建立了机械手的动力学前馈控制方法。为进一步提高控制过程的鲁棒性,结合H∞控制方法提出了一种H∞+动力学前馈的控制方法。在建立机械手整机机电联合仿真系统的基础上,对所提出的两种控制方法进行了详细的仿真和对比。仿真结果表明,本文提出的控制方法可以减少力矩扰动对伺服电机输出带来的影响,大大减小了机械手末端的定位误差,提高了机械手的控制精度。







2020, 39(1): 10-15.
doi: 10.13433/j.cnki.1003-8728.20190092
摘要:
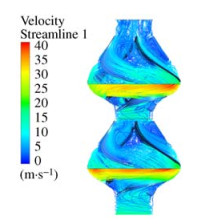
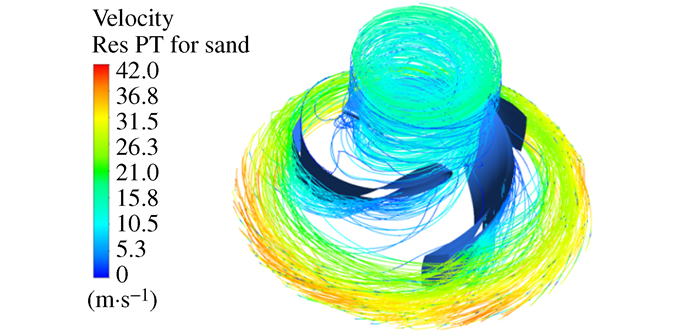
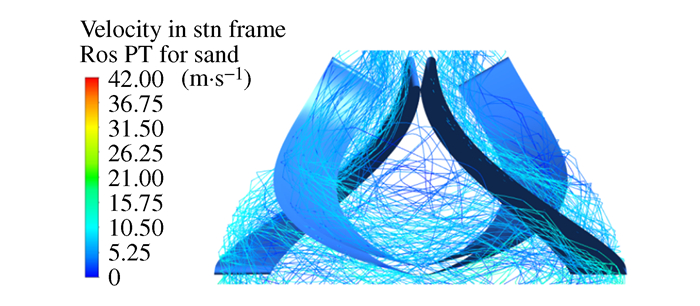
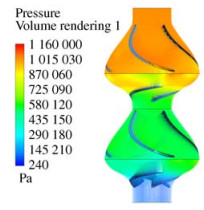
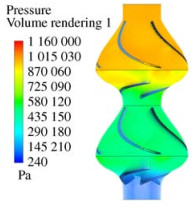
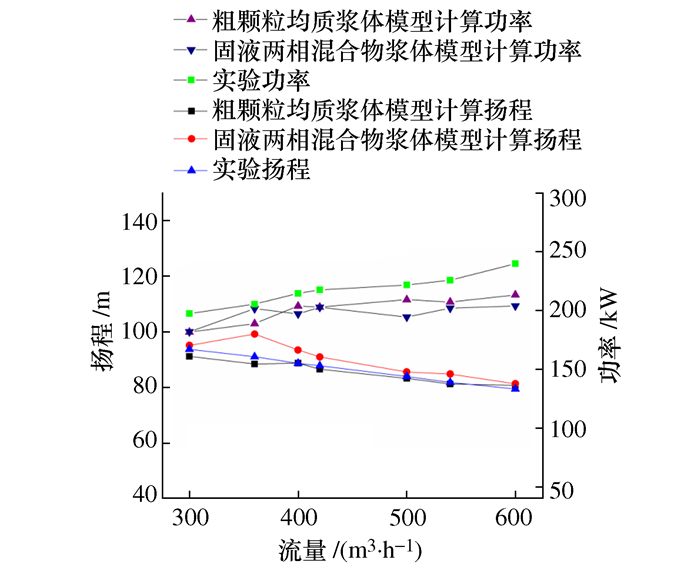
为选用合理的固液两相流动模型用于深海扬矿泵内矿物浆体的计算。针对深海海底矿物具有颗粒粒级跨度大且粒径大的特点,本文分别选用粗颗粒-均质浆体计算模型和固液两相混合物浆体计算模型,开展扬矿泵数值模拟分析。研究发现,粗颗粒-均质浆体计算模型计算得到的内部流场与固液两相混合物浆体计算模型得到的内部流场是相似的,所以该模型可以用来分析扬矿泵的内部流场;该模型减少了颗粒追踪数量可以节约计算时间;将两种计算方法得到的扬矿泵外特性与试验结果进行比较,发现该模型计算得到的泵扬程与功率均更接近试验结果,说明该模型在扬矿泵性能计算是有优势的。
为选用合理的固液两相流动模型用于深海扬矿泵内矿物浆体的计算。针对深海海底矿物具有颗粒粒级跨度大且粒径大的特点,本文分别选用粗颗粒-均质浆体计算模型和固液两相混合物浆体计算模型,开展扬矿泵数值模拟分析。研究发现,粗颗粒-均质浆体计算模型计算得到的内部流场与固液两相混合物浆体计算模型得到的内部流场是相似的,所以该模型可以用来分析扬矿泵的内部流场;该模型减少了颗粒追踪数量可以节约计算时间;将两种计算方法得到的扬矿泵外特性与试验结果进行比较,发现该模型计算得到的泵扬程与功率均更接近试验结果,说明该模型在扬矿泵性能计算是有优势的。





2020, 39(1): 16-21.
doi: 10.13433/j.cnki.1003-8728.20190081
摘要:
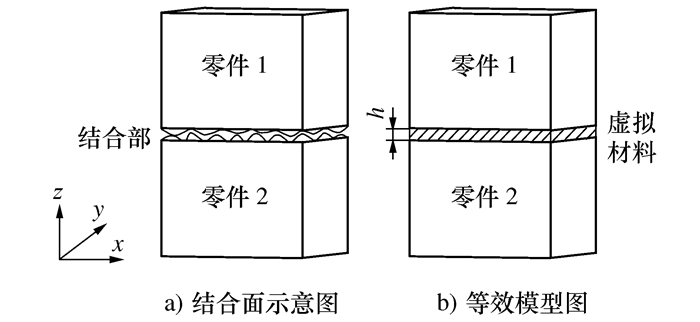
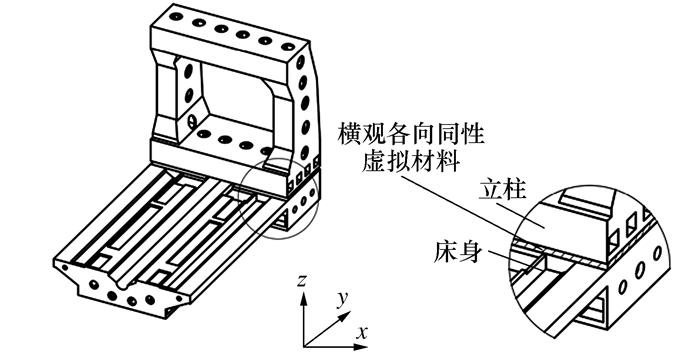
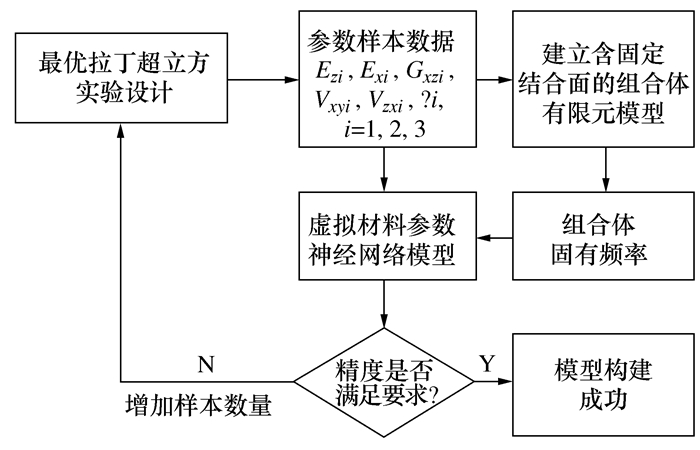
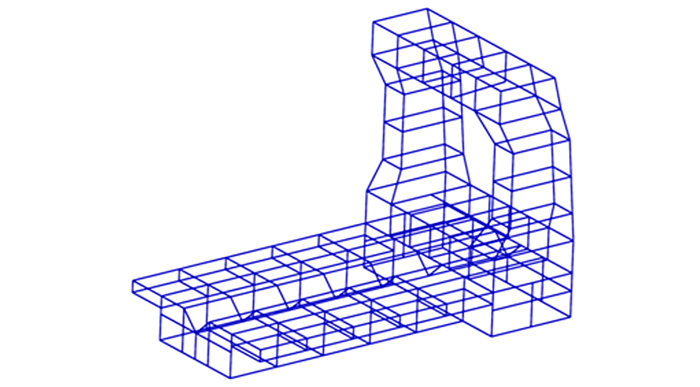
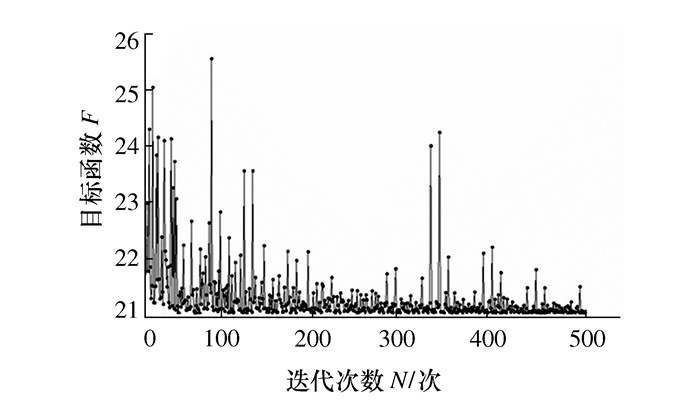
针对各向同性虚拟材料模型不能准确表征螺栓固定结合面法向和切向的性能差异的问题,以机床立柱-床身螺栓固定结合面为研究对象,采用横观各向同性虚拟材料对机床螺栓固定结合面进行动力学建模,通过试验设计和有限元分析构建机床螺栓固定结合面的径向基函数神经网络模型。结合模态试验结果构建寻优目标函数,并利用粒子群优化算法进行求解,识别出横观各向同性虚拟材料弹性常数。结果表明:实验模型的理论模态与实验模态前六阶振型基本一致,固有频率的误差小于5.1%,说明了该方法的有效性,为机床螺栓固定结合面参数识别提供了一种新方法。
针对各向同性虚拟材料模型不能准确表征螺栓固定结合面法向和切向的性能差异的问题,以机床立柱-床身螺栓固定结合面为研究对象,采用横观各向同性虚拟材料对机床螺栓固定结合面进行动力学建模,通过试验设计和有限元分析构建机床螺栓固定结合面的径向基函数神经网络模型。结合模态试验结果构建寻优目标函数,并利用粒子群优化算法进行求解,识别出横观各向同性虚拟材料弹性常数。结果表明:实验模型的理论模态与实验模态前六阶振型基本一致,固有频率的误差小于5.1%,说明了该方法的有效性,为机床螺栓固定结合面参数识别提供了一种新方法。





2020, 39(1): 22-27.
doi: 10.13433/j.cnki.1003-8728.20190087
摘要:
在刚柔耦合动力学理论基础上,联合PATRAN/NASTRAN与ADAMS软件对喉块柔板进行动力学仿真,让喉块与柔板运动到目标位置,仿真结果显示,忽略喉块和柔板接触点运动轨迹规划,会使得喉块与柔板连接处接触力过大不满足要求。为此对喉块与柔板接触点运动轨迹进行轨迹规划,考虑喉块和柔板的运动协调性,调整喉块和柔板接触点运动轨迹,结果表明:该方法既满足喉块与柔板接触力大小,又能保证喉块和柔板的型面精度,为喉块柔板协调运动提供必要的理论依据。
在刚柔耦合动力学理论基础上,联合PATRAN/NASTRAN与ADAMS软件对喉块柔板进行动力学仿真,让喉块与柔板运动到目标位置,仿真结果显示,忽略喉块和柔板接触点运动轨迹规划,会使得喉块与柔板连接处接触力过大不满足要求。为此对喉块与柔板接触点运动轨迹进行轨迹规划,考虑喉块和柔板的运动协调性,调整喉块和柔板接触点运动轨迹,结果表明:该方法既满足喉块与柔板接触力大小,又能保证喉块和柔板的型面精度,为喉块柔板协调运动提供必要的理论依据。




2020, 39(1): 28-34.
doi: 10.13433/j.cnki.1003-8728.20190239
摘要:
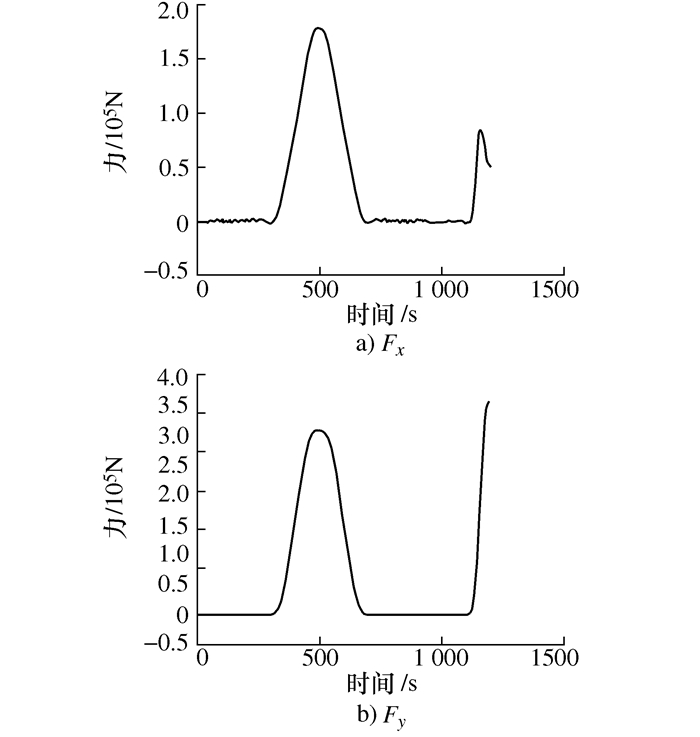
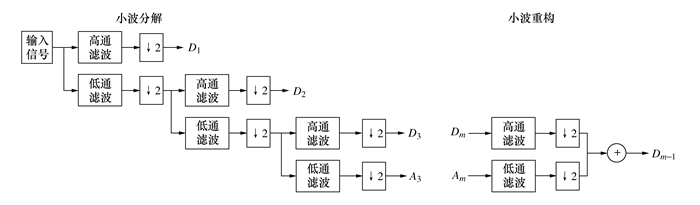
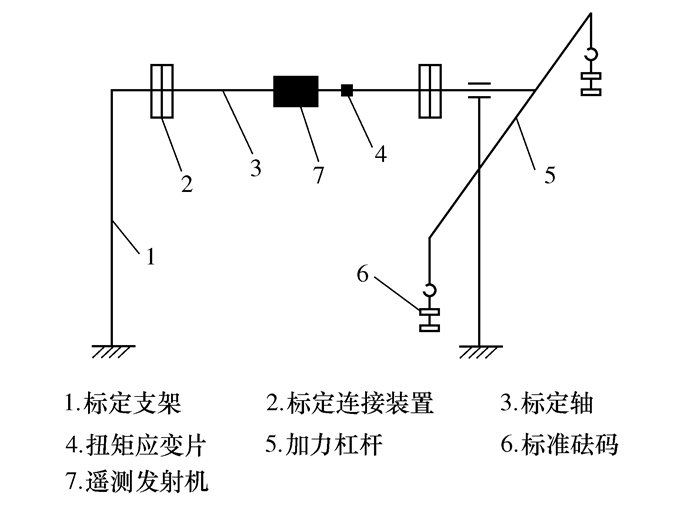
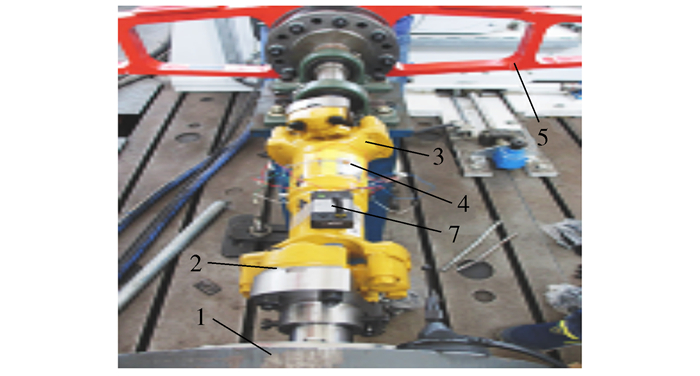
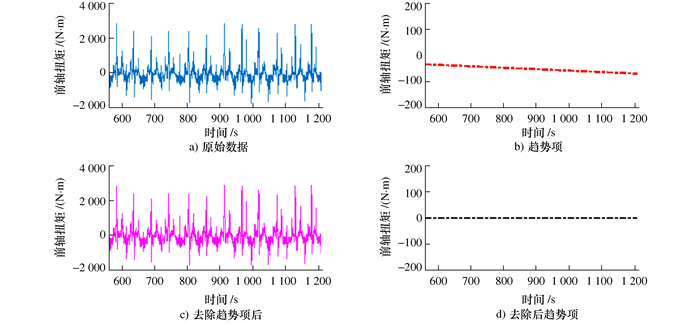
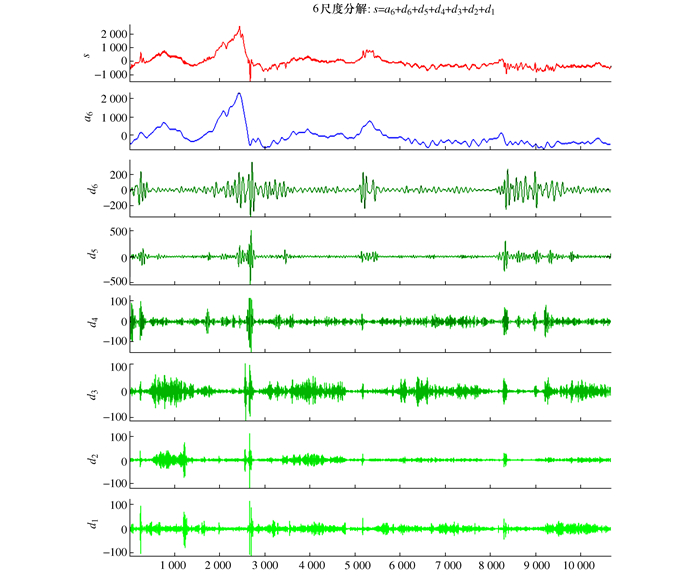
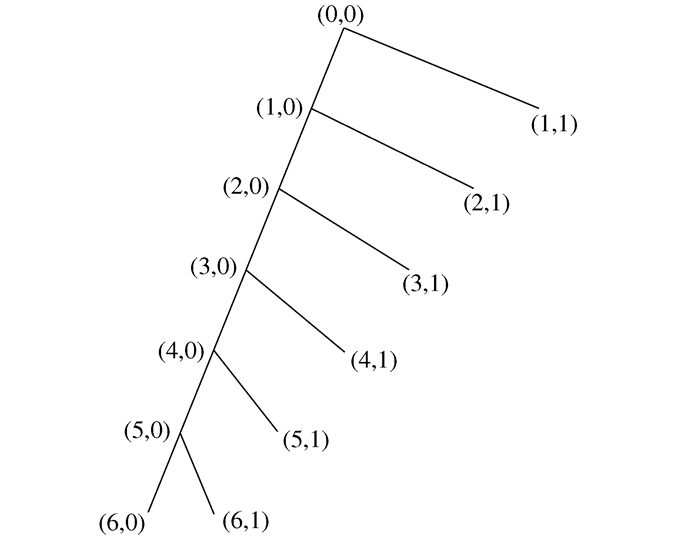
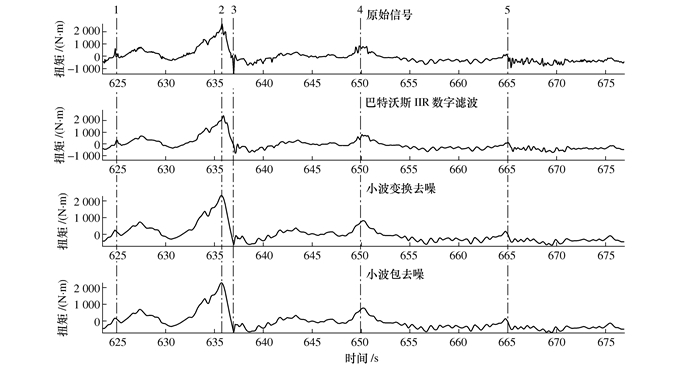
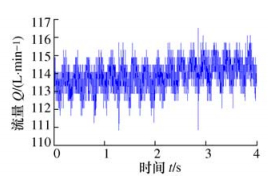
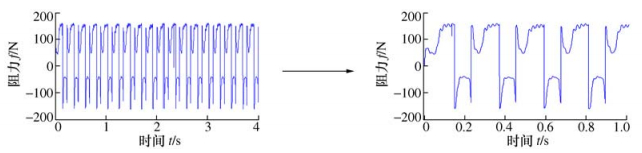
装载机的传动系统工作时传感器所采集到的信号受环境干扰大,不利于数据分析,因此在研究其工作状态时需对数据信号进行降噪滤波。本文以5t装载机的前轴扭矩信号为研究对象,剥离其趋势项后采用小波包变换法进行db9-6尺度分解,进而通过小波包最优分解树得到重构信号。通过与巴特沃斯去噪、小波变换去噪法对比后得出:巴特沃斯滤波处理法相较于原始信号存在相位偏移;小波包最优基分解树去噪后的信噪比、均方根误差分别为16.38与74.71,与小波变换去噪法相比结果近似,更适用于工况识别、人工智能算法等领域。研究结果可为其他同类型工程机械数据信号处理提供方法依据。
装载机的传动系统工作时传感器所采集到的信号受环境干扰大,不利于数据分析,因此在研究其工作状态时需对数据信号进行降噪滤波。本文以5t装载机的前轴扭矩信号为研究对象,剥离其趋势项后采用小波包变换法进行db9-6尺度分解,进而通过小波包最优分解树得到重构信号。通过与巴特沃斯去噪、小波变换去噪法对比后得出:巴特沃斯滤波处理法相较于原始信号存在相位偏移;小波包最优基分解树去噪后的信噪比、均方根误差分别为16.38与74.71,与小波变换去噪法相比结果近似,更适用于工况识别、人工智能算法等领域。研究结果可为其他同类型工程机械数据信号处理提供方法依据。



2020, 39(1): 35-40.
doi: 10.13433/j.cnki.1003-8728.20190086
摘要:
针对并联装置的结构复杂性、动力学模型的高度耦合性和非线性问题,以一种并联太阳跟踪装置为研究对象,对其机构运动特点和逆运动学进行了分析,基于U-K理论提出一种应用于并联机构的拉格朗日法和U-K理论相结合的动力学建模方法。首先,运用拉格朗日法求解了并联机构各支链的动力学模型;其次,考虑并联机构支链对动平台的约束关系,利用层级堆聚思想,在不引入拉格朗日乘子的情况下建立了跟踪装置的基于约束的动力学模型;最后,利用MATLAB和ADAMS联合仿真对所建立的动力学模型进行了求解和验证。结果表明理论计算与仿真分析的一致性。
针对并联装置的结构复杂性、动力学模型的高度耦合性和非线性问题,以一种并联太阳跟踪装置为研究对象,对其机构运动特点和逆运动学进行了分析,基于U-K理论提出一种应用于并联机构的拉格朗日法和U-K理论相结合的动力学建模方法。首先,运用拉格朗日法求解了并联机构各支链的动力学模型;其次,考虑并联机构支链对动平台的约束关系,利用层级堆聚思想,在不引入拉格朗日乘子的情况下建立了跟踪装置的基于约束的动力学模型;最后,利用MATLAB和ADAMS联合仿真对所建立的动力学模型进行了求解和验证。结果表明理论计算与仿真分析的一致性。




2020, 39(1): 41-46.
doi: 10.13433/j.cnki.1003-8728.20190093
摘要:
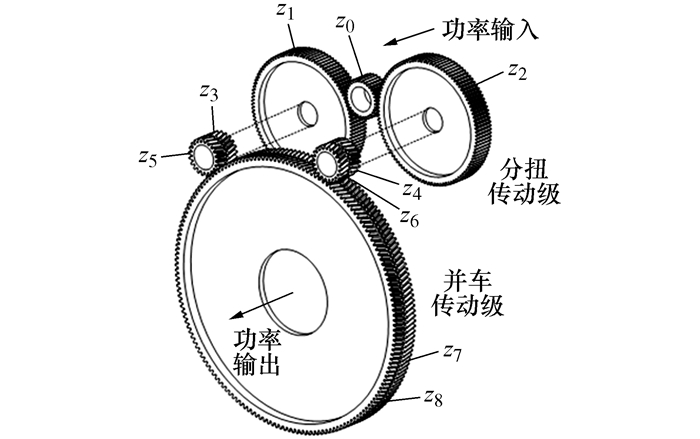
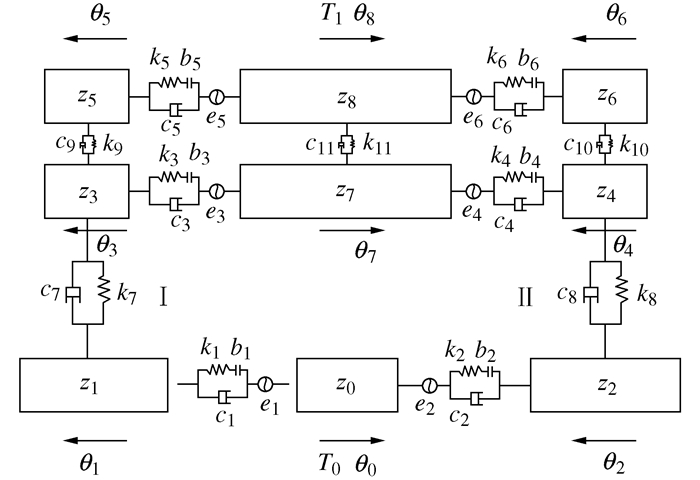
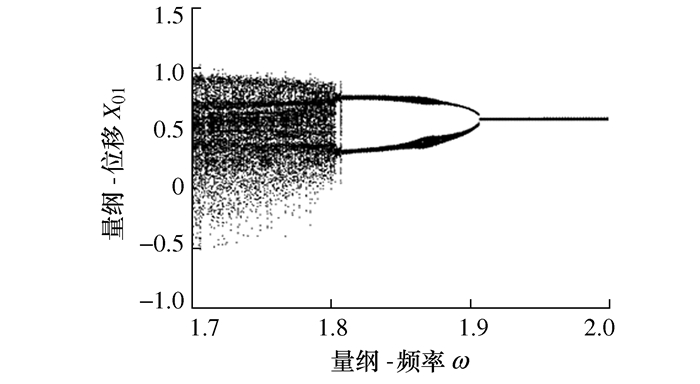
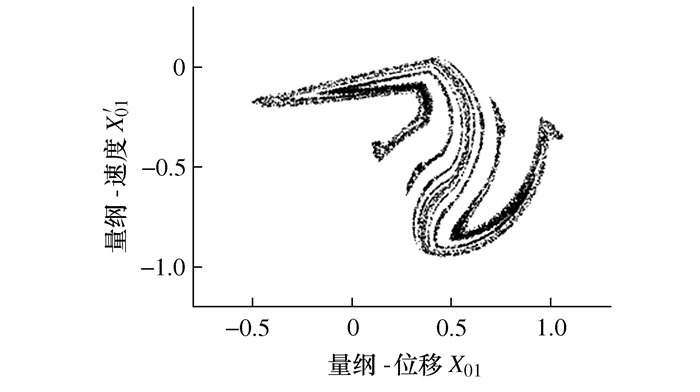
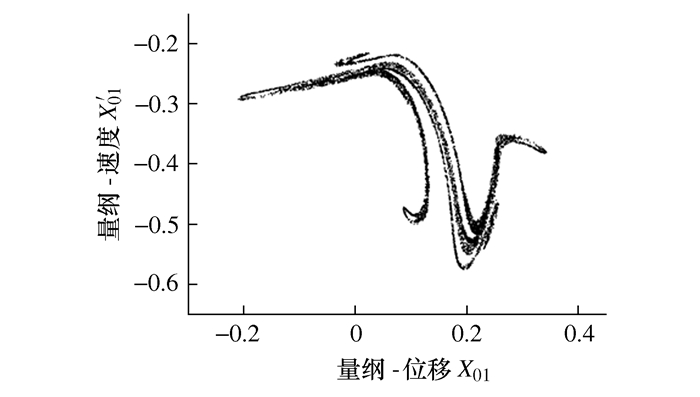
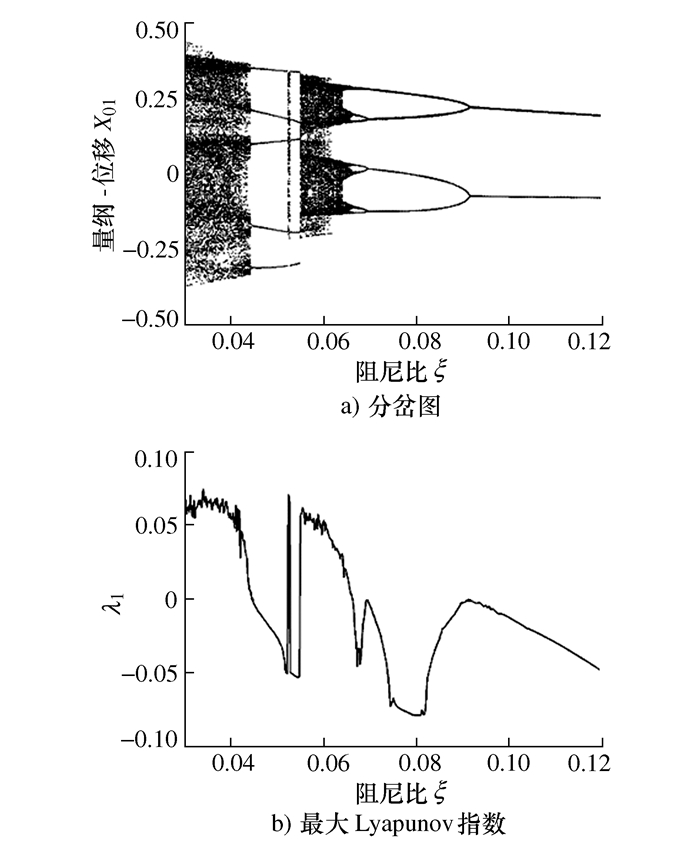
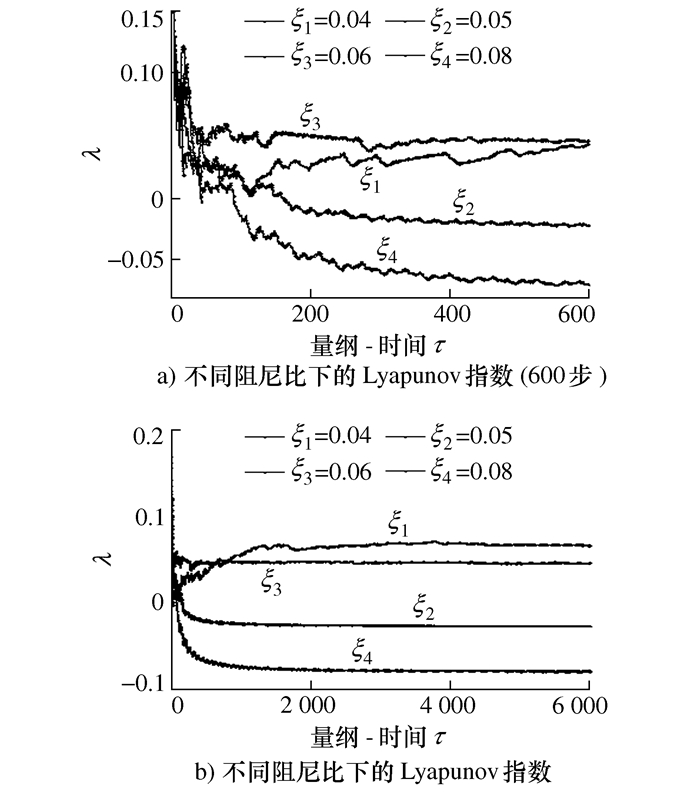
为研究分扭-并车齿轮传动系统非线性分岔特性,建立了含多间隙的分扭-并车齿轮系统非线性动力学模型,引入高斯消元技术和广义相对位移变量消除了系统的刚体位移,并对动力学方程组实施了量纲一化处理。综合考虑啮合频率、齿侧间隙、综合传动误差和阻尼比等激励下的分岔通道,借助分岔图、Poincaré截面和Lyapunov指数等手段对系统的分岔行为进行了定性和定量表征。结果表明啮合频率增大时系统发生逆向倍周期分岔,分岔点位置受齿侧间隙影响显著;齿侧间隙和综合传动误差变化下混沌域内均出现短暂周期窗口;阻尼对倍周期分岔运动存在抑制作用,其结果对该类齿轮系统动力学设计具有参考价值。
为研究分扭-并车齿轮传动系统非线性分岔特性,建立了含多间隙的分扭-并车齿轮系统非线性动力学模型,引入高斯消元技术和广义相对位移变量消除了系统的刚体位移,并对动力学方程组实施了量纲一化处理。综合考虑啮合频率、齿侧间隙、综合传动误差和阻尼比等激励下的分岔通道,借助分岔图、Poincaré截面和Lyapunov指数等手段对系统的分岔行为进行了定性和定量表征。结果表明啮合频率增大时系统发生逆向倍周期分岔,分岔点位置受齿侧间隙影响显著;齿侧间隙和综合传动误差变化下混沌域内均出现短暂周期窗口;阻尼对倍周期分岔运动存在抑制作用,其结果对该类齿轮系统动力学设计具有参考价值。



2020, 39(1): 47-51.
doi: 10.13433/j.cnki.1003-8728.20190088
摘要:
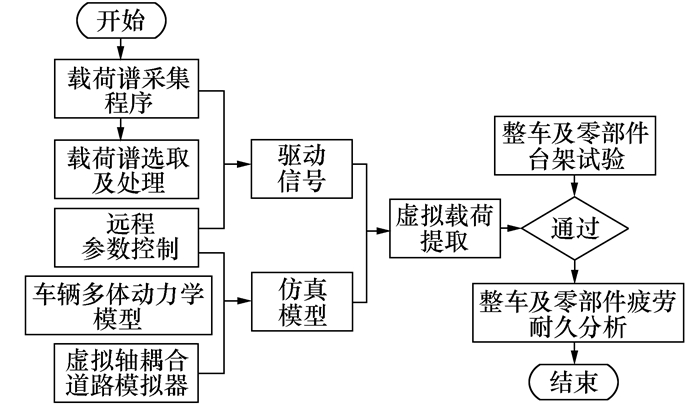
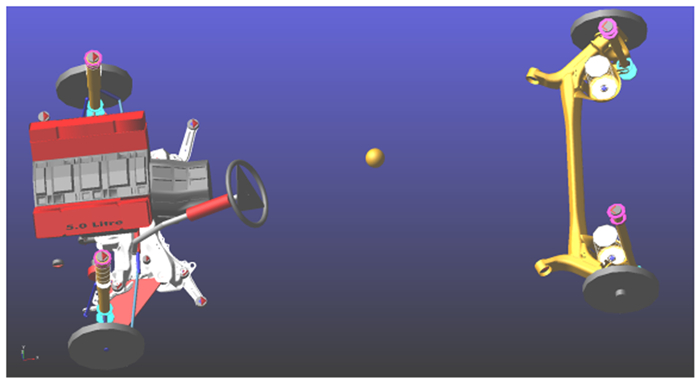
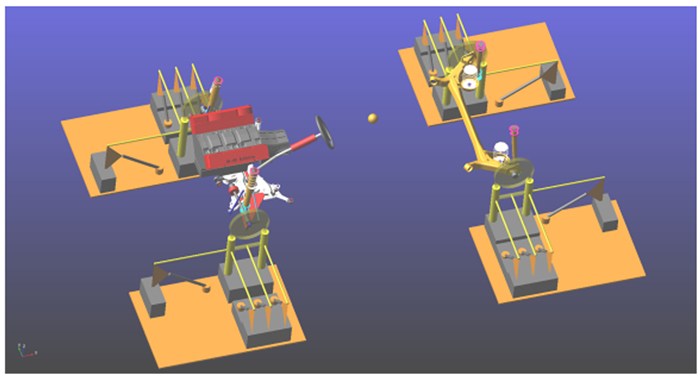
针对整车疲劳耐久性能开发中载荷提取的难题,提出利用虚拟轴耦合道路模拟器快速提取计算载荷的方法。研究建立了基于整车多体动力学模型和虚拟轴耦合道路模拟器的虚拟疲劳耐久测试系统,并以整车在试验场采集的载荷谱为模型输入条件,提取车辆模型的部件或子系统的计算载荷。通过与实验数据对比,研究表明各主要部件的载荷谱在时域上变化趋势基本一致,提取的载荷精度能够满足整车及零部件的疲劳耐久性分析要求。
针对整车疲劳耐久性能开发中载荷提取的难题,提出利用虚拟轴耦合道路模拟器快速提取计算载荷的方法。研究建立了基于整车多体动力学模型和虚拟轴耦合道路模拟器的虚拟疲劳耐久测试系统,并以整车在试验场采集的载荷谱为模型输入条件,提取车辆模型的部件或子系统的计算载荷。通过与实验数据对比,研究表明各主要部件的载荷谱在时域上变化趋势基本一致,提取的载荷精度能够满足整车及零部件的疲劳耐久性分析要求。



2020, 39(1): 52-57.
doi: 10.13433/j.cnki.1003-8728.20190090
摘要:
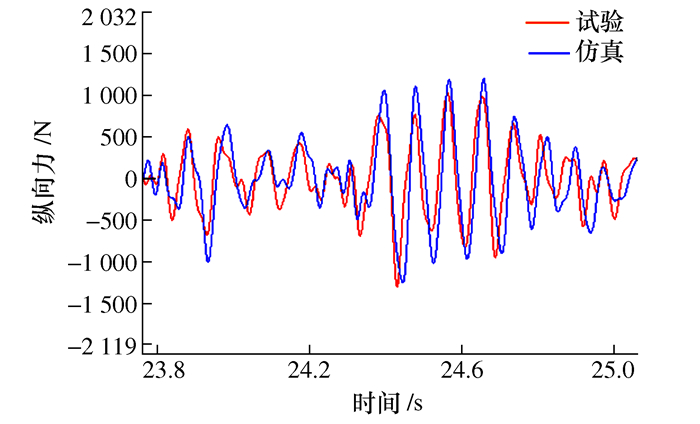
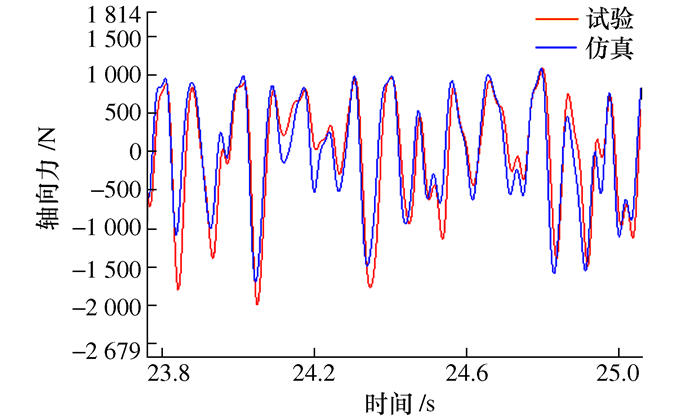
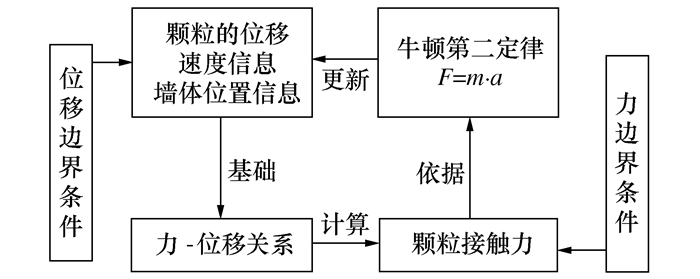
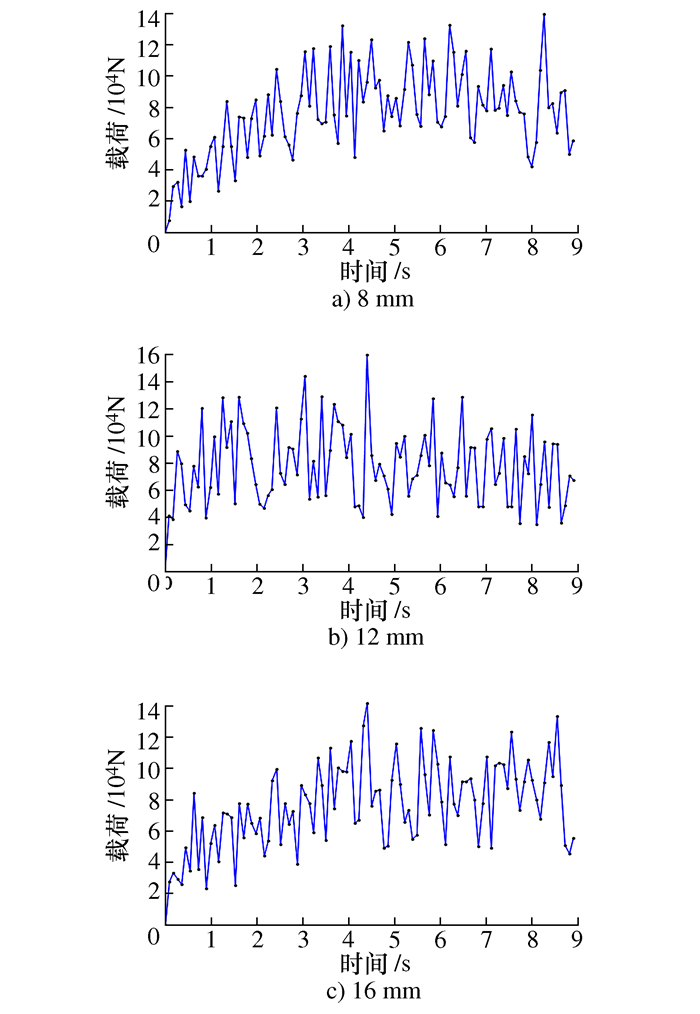
为研究EDEM离散元软件在螺旋滚筒截割过程仿真时颗粒半径对滚筒载荷特性及落煤情况的影响,利用EDEM仿真软件模拟某型号采煤机滚筒截割复杂煤壁时的动态过程,得到截割过程中滚筒载荷、载荷波动及落煤情况,并与基于MATLAB开发的辅助计算程序所计算出的数值进行对比。结果表明:使用不同半径的离散颗粒进行仿真会对滚筒载荷及落煤情况产生影响,随着颗粒半径增大,滚筒载荷没有过大的变化,螺旋滚筒截落下的颗粒平均初始速度减小,载荷波动系数与装煤率增大。对比理论计算数值,使用半径为12 mm的颗粒建立煤壁,仿真结果更接近理论数值,准确性高,为EDEM离散元仿真软件模拟采煤机截割过程时颗粒半径的选择提供参考。
为研究EDEM离散元软件在螺旋滚筒截割过程仿真时颗粒半径对滚筒载荷特性及落煤情况的影响,利用EDEM仿真软件模拟某型号采煤机滚筒截割复杂煤壁时的动态过程,得到截割过程中滚筒载荷、载荷波动及落煤情况,并与基于MATLAB开发的辅助计算程序所计算出的数值进行对比。结果表明:使用不同半径的离散颗粒进行仿真会对滚筒载荷及落煤情况产生影响,随着颗粒半径增大,滚筒载荷没有过大的变化,螺旋滚筒截落下的颗粒平均初始速度减小,载荷波动系数与装煤率增大。对比理论计算数值,使用半径为12 mm的颗粒建立煤壁,仿真结果更接近理论数值,准确性高,为EDEM离散元仿真软件模拟采煤机截割过程时颗粒半径的选择提供参考。



2020, 39(1): 58-61.
doi: 10.13433/j.cnki.1003-8728.20190085
摘要:
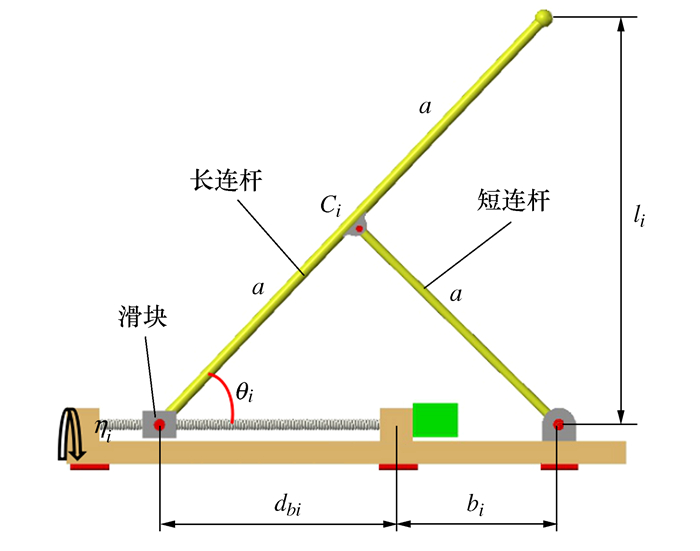
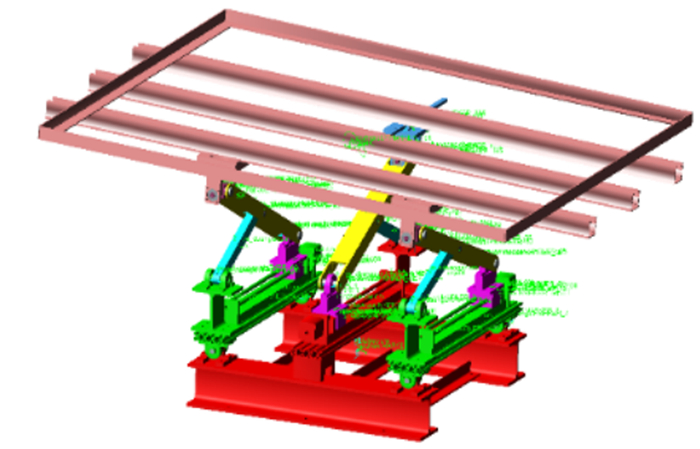
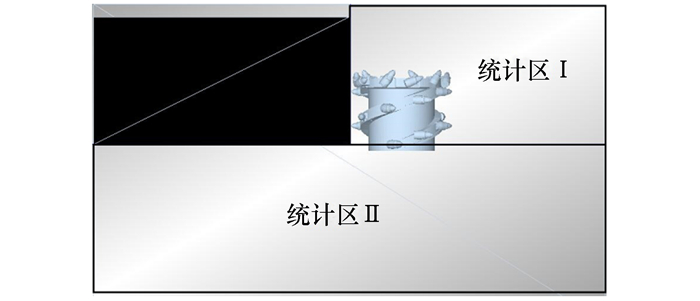
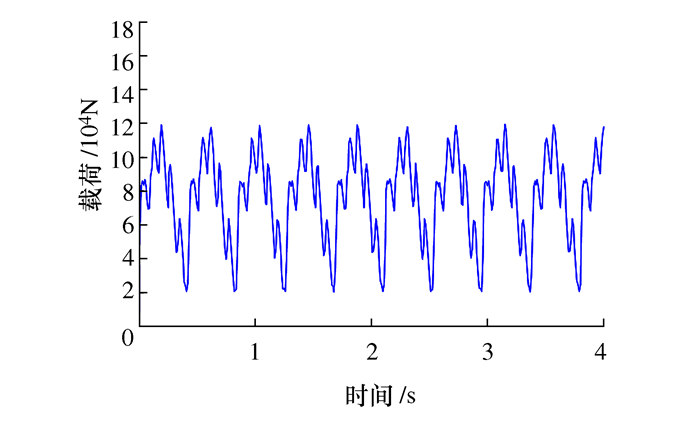
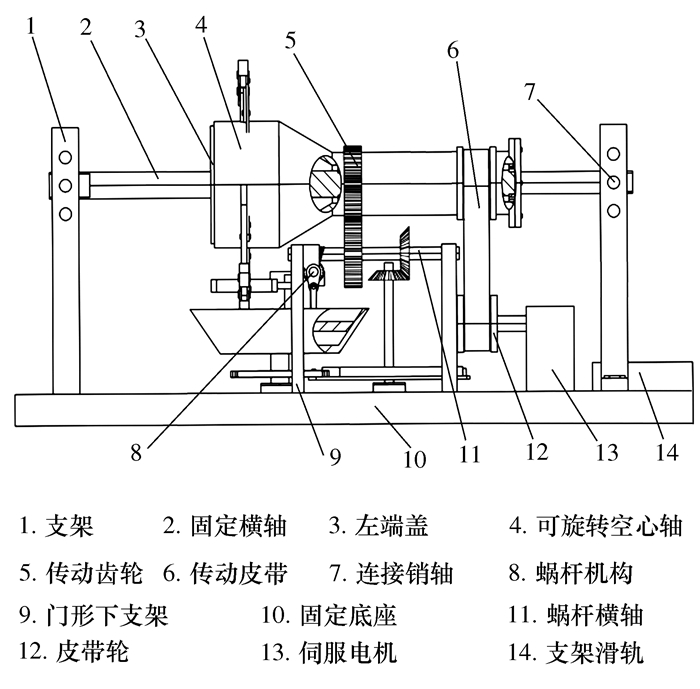
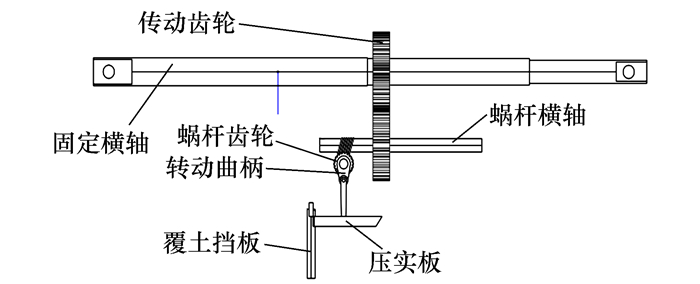
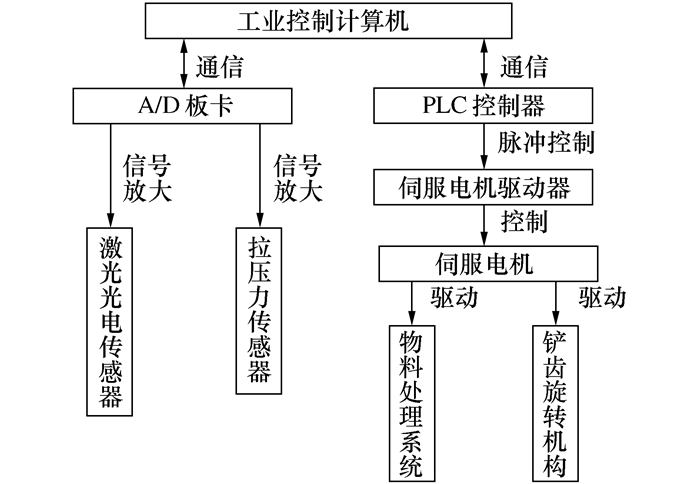
针对目前大部分摩擦磨损试验机实验形式单一,只能进行较为典型的摩擦磨损实验,不能模拟铲齿挖掘物料的实际摩擦工况等问题,研制了一种新型铲齿摩擦磨损试验机。通过采用由凸轮驱动的多连杆铲齿转臂运动,模拟铲齿在物料中的运动状态,采用槽轮机构和压实机构在铲齿挖掘的同时对物料进行覆平和压实,模拟铲齿挖掘时的物料状态,从而对不同工况和材料铲齿的磨损性能进行测量,为铲齿设计、检测和对比不同种类铲齿的寿命情况提供可靠的依据。
针对目前大部分摩擦磨损试验机实验形式单一,只能进行较为典型的摩擦磨损实验,不能模拟铲齿挖掘物料的实际摩擦工况等问题,研制了一种新型铲齿摩擦磨损试验机。通过采用由凸轮驱动的多连杆铲齿转臂运动,模拟铲齿在物料中的运动状态,采用槽轮机构和压实机构在铲齿挖掘的同时对物料进行覆平和压实,模拟铲齿挖掘时的物料状态,从而对不同工况和材料铲齿的磨损性能进行测量,为铲齿设计、检测和对比不同种类铲齿的寿命情况提供可靠的依据。


2020, 39(1): 62-67.
doi: 10.13433/j.cnki.1003-8728.20190099
摘要:
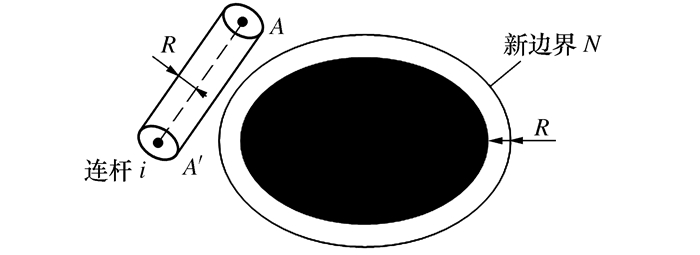
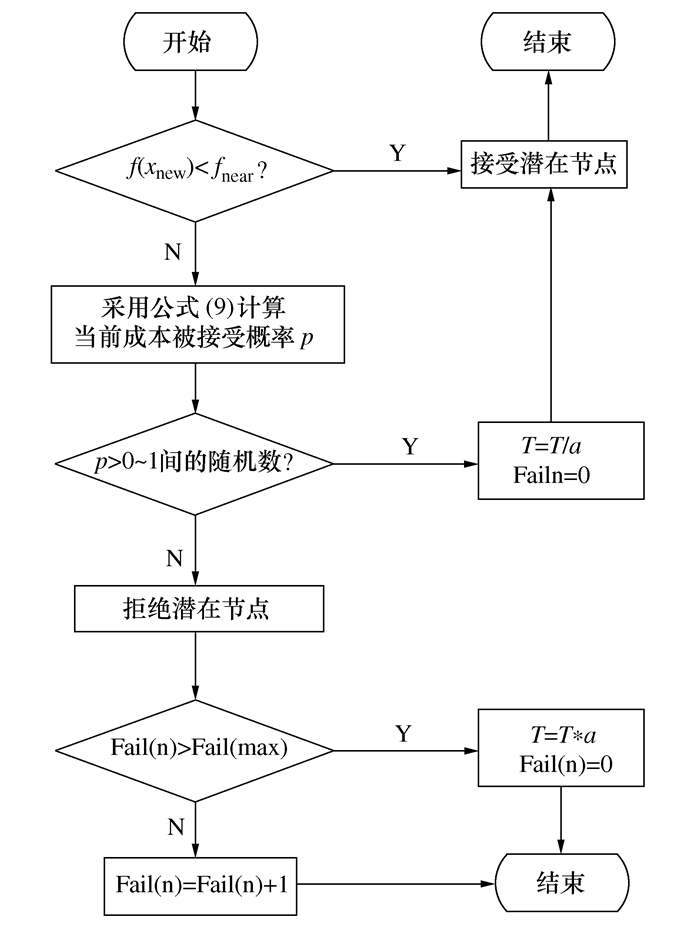
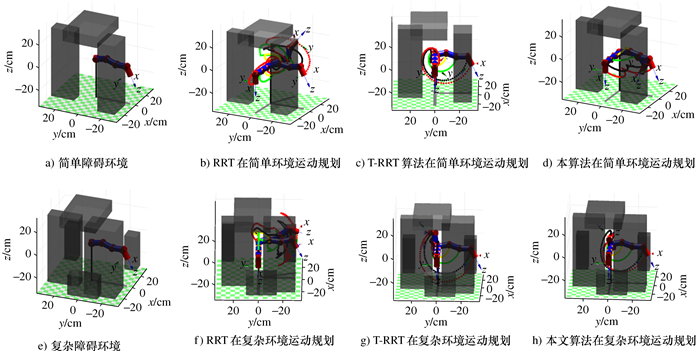
本文提出一种基于连杆运动方程的人工势场,引导基于转换的快速随机扩展树(T-RRT)改进算法采样,在高维度空间搜索低成本路径的同时解决机械臂运动规划中T-RRT算法收敛速度慢的问题。简化机械臂模型以提高碰撞检测的效率,并与运动学分析结合调制连杆运动方程,从而确定各质点轨迹长度、叠加以建立机械臂人工势场,作为代价函数判断状态节点的成本,引导其不断向目标位置逼近,同时为了进一步提高算法的扩张速度,引入剪枝函数对细化节点进行限制。在不同的障碍地图中进行MATLAB仿真实验,该算法与RRT、T-RRT算法相比,路径长度最短、节点采样效率最高、节点平均采样时间最优,运行时间分别缩短了约3/4及2/3。所提算法在提高路径质量的同时有效提高搜索效率,能适应环境的变化。
本文提出一种基于连杆运动方程的人工势场,引导基于转换的快速随机扩展树(T-RRT)改进算法采样,在高维度空间搜索低成本路径的同时解决机械臂运动规划中T-RRT算法收敛速度慢的问题。简化机械臂模型以提高碰撞检测的效率,并与运动学分析结合调制连杆运动方程,从而确定各质点轨迹长度、叠加以建立机械臂人工势场,作为代价函数判断状态节点的成本,引导其不断向目标位置逼近,同时为了进一步提高算法的扩张速度,引入剪枝函数对细化节点进行限制。在不同的障碍地图中进行MATLAB仿真实验,该算法与RRT、T-RRT算法相比,路径长度最短、节点采样效率最高、节点平均采样时间最优,运行时间分别缩短了约3/4及2/3。所提算法在提高路径质量的同时有效提高搜索效率,能适应环境的变化。


2020, 39(1): 68-73.
doi: 10.13433/j.cnki.1003-8728.20190076
摘要:
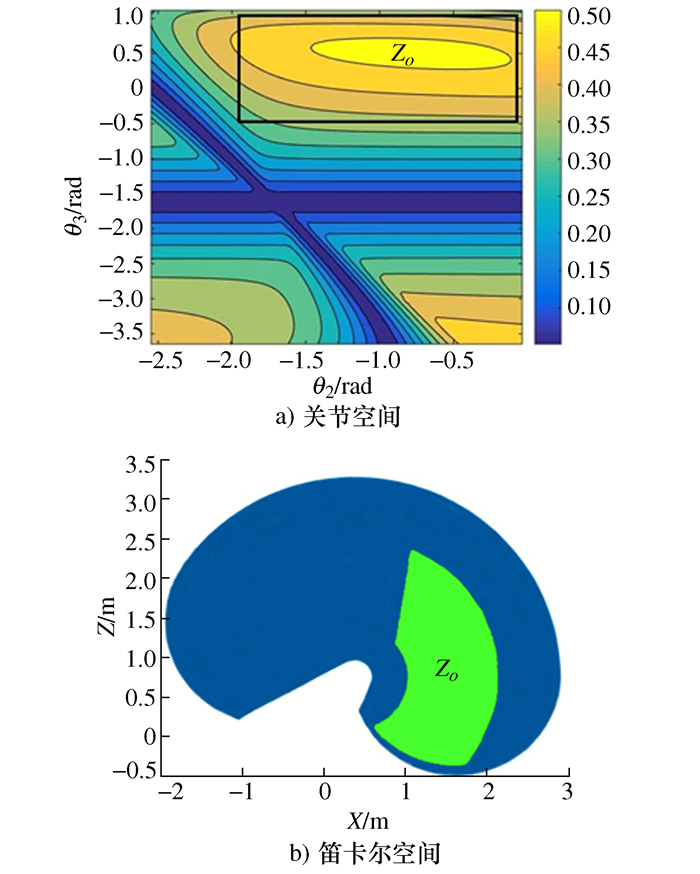
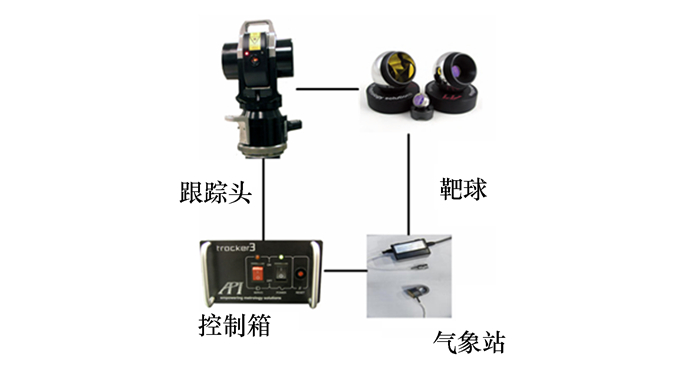
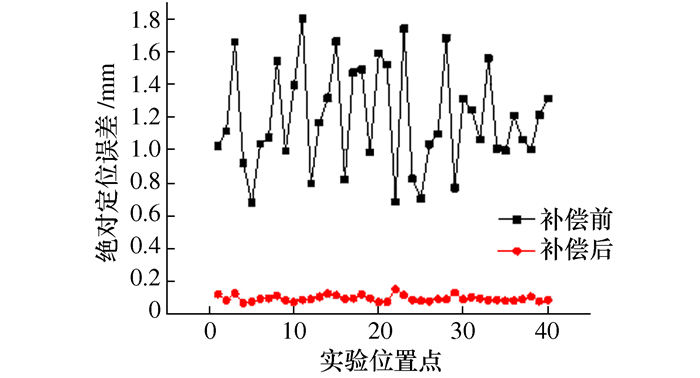
相较于机床,工业机器人绝对定位精度较低,难以满足磨削等高精度加工工艺的需求,较大地限制了其应用拓展。针对该问题,本文重点考虑空间测量位置的优化与选择,提出了一种基于距离精度的机器人绝对定位精度标定方法。首先在空间测量位置对于测量精度影响分析的基础上,采用了雅克比矩阵条件数来定量描述机器人运动性能。结合机器人关节运动特征,分别给出了关节空间与末端笛卡尔运动空间内的机器人优化测量位置范围。然后采用MD-H运动学方法构建了机器人绝对定位精度误差模型,引入距离精度方法,通过距离误差计算避免了坐标系转换误差。最后基于KUKA机器人实验平台开展了标定实验,结果表明机器人平均绝对定位误差从标定前的1.191 mm降低到了0.096 mm,有效验证了方法的有效性。
相较于机床,工业机器人绝对定位精度较低,难以满足磨削等高精度加工工艺的需求,较大地限制了其应用拓展。针对该问题,本文重点考虑空间测量位置的优化与选择,提出了一种基于距离精度的机器人绝对定位精度标定方法。首先在空间测量位置对于测量精度影响分析的基础上,采用了雅克比矩阵条件数来定量描述机器人运动性能。结合机器人关节运动特征,分别给出了关节空间与末端笛卡尔运动空间内的机器人优化测量位置范围。然后采用MD-H运动学方法构建了机器人绝对定位精度误差模型,引入距离精度方法,通过距离误差计算避免了坐标系转换误差。最后基于KUKA机器人实验平台开展了标定实验,结果表明机器人平均绝对定位误差从标定前的1.191 mm降低到了0.096 mm,有效验证了方法的有效性。


2020, 39(1): 74-82.
doi: 10.13433/j.cnki.1003-8728.20190257
摘要:
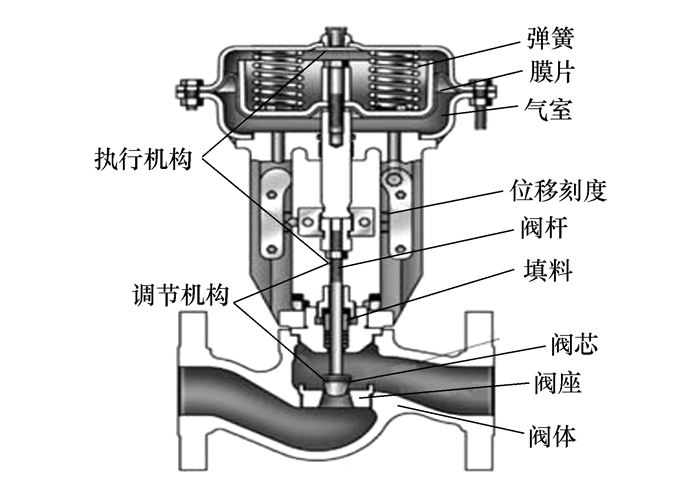
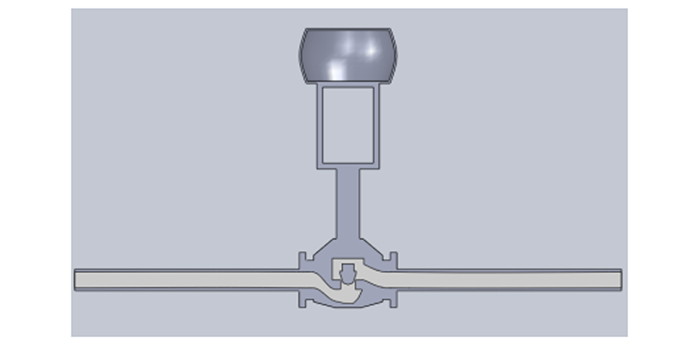
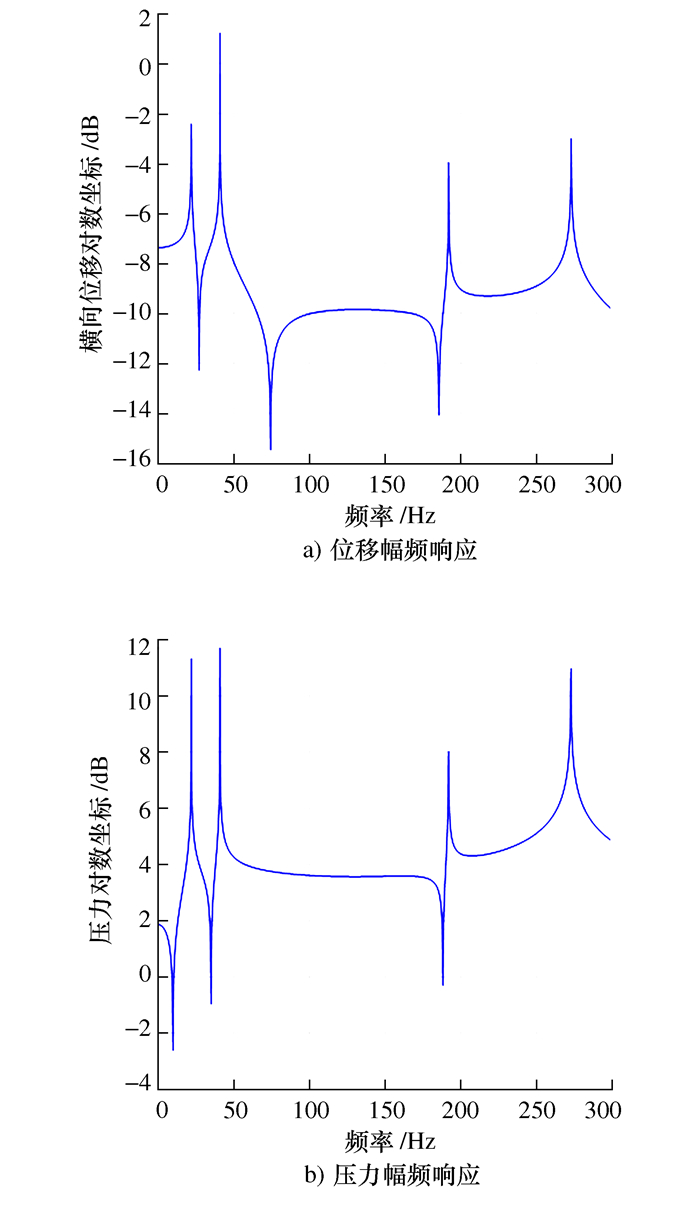
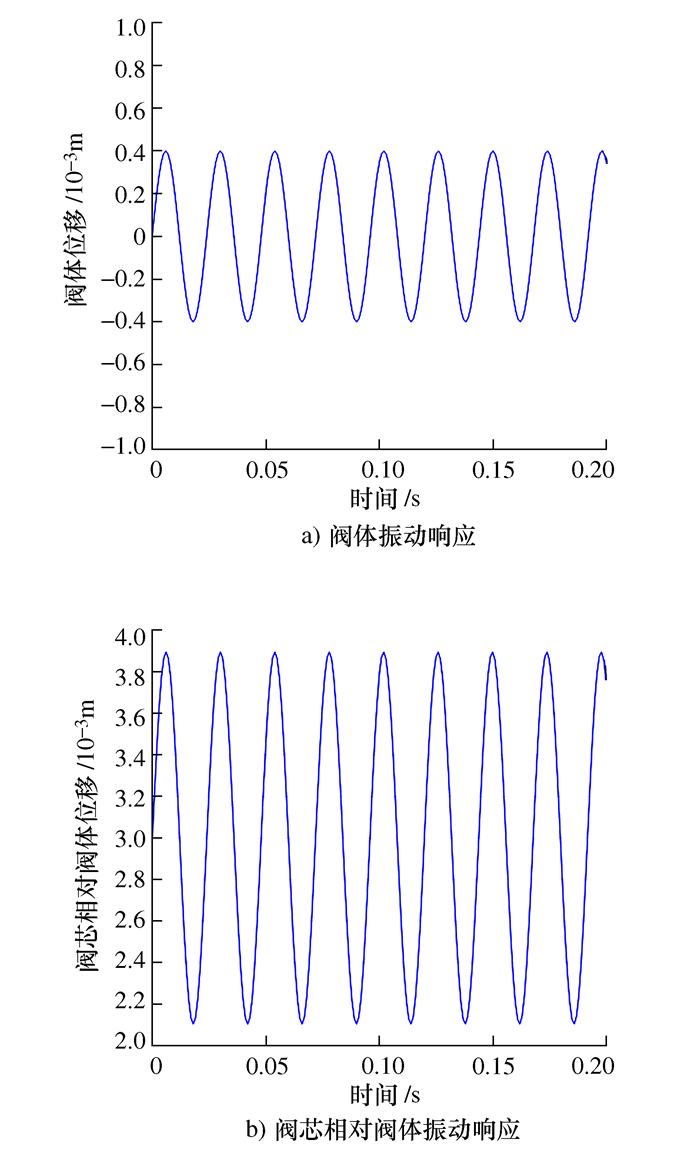
为了揭示控制阀-输流管道系统的流固耦合振动规律,研究了系统的传递矩阵模型建模方法。以一个带有单座式调节阀的固定-简支输流管道的振动分析为例,考虑调节阀内及管道内流固耦合作用,将控制阀阀体作为刚体,控制阀内部阀芯-阀杆-薄膜简化为单自由度质量-弹簧-阻尼系统,输流管道简化为弹性连续梁模型,建立了基于线性假设的控制阀-输流管道流固耦合系统的传递矩阵模型。仿真分析了给定工况下系统的固有特性和稳态简谐时域和频域响应,证明了传递矩阵模型的有效性;同时,通过与单一控制阀模型和单一输流管道模型的仿真对比,揭示了控制阀与输流管道流固耦合相互作用对系统振动响应的影响规律。
为了揭示控制阀-输流管道系统的流固耦合振动规律,研究了系统的传递矩阵模型建模方法。以一个带有单座式调节阀的固定-简支输流管道的振动分析为例,考虑调节阀内及管道内流固耦合作用,将控制阀阀体作为刚体,控制阀内部阀芯-阀杆-薄膜简化为单自由度质量-弹簧-阻尼系统,输流管道简化为弹性连续梁模型,建立了基于线性假设的控制阀-输流管道流固耦合系统的传递矩阵模型。仿真分析了给定工况下系统的固有特性和稳态简谐时域和频域响应,证明了传递矩阵模型的有效性;同时,通过与单一控制阀模型和单一输流管道模型的仿真对比,揭示了控制阀与输流管道流固耦合相互作用对系统振动响应的影响规律。



2020, 39(1): 83-87.
doi: 10.13433/j.cnki.1003-8728.20190095
摘要:
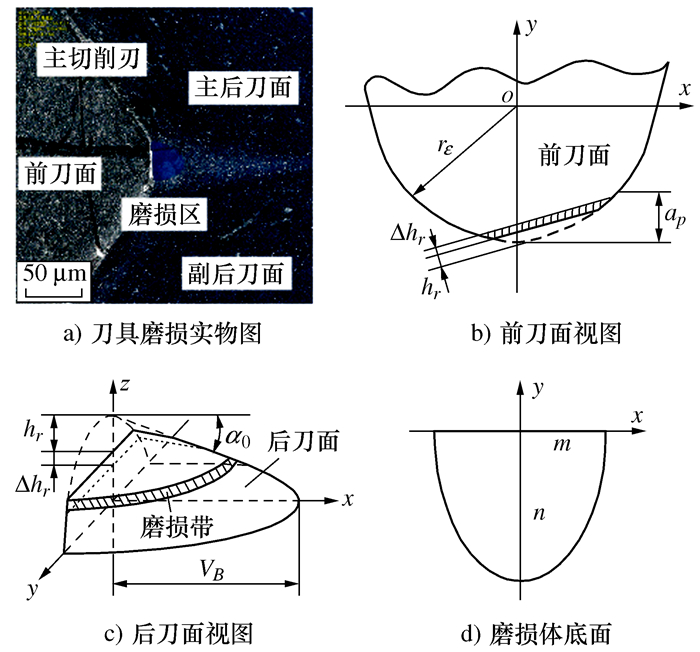
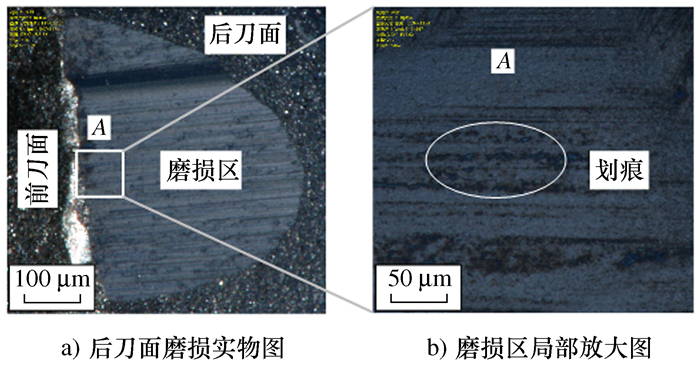
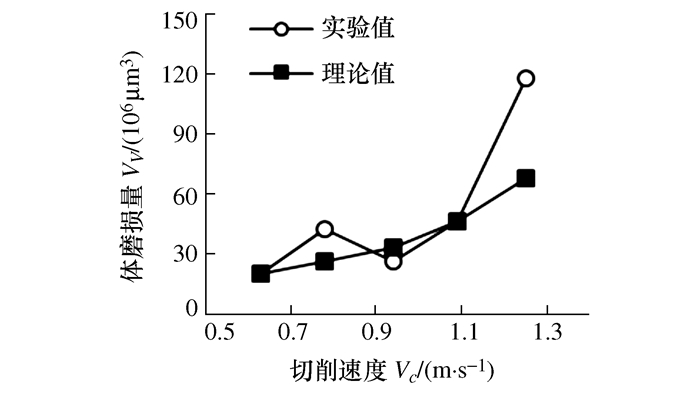
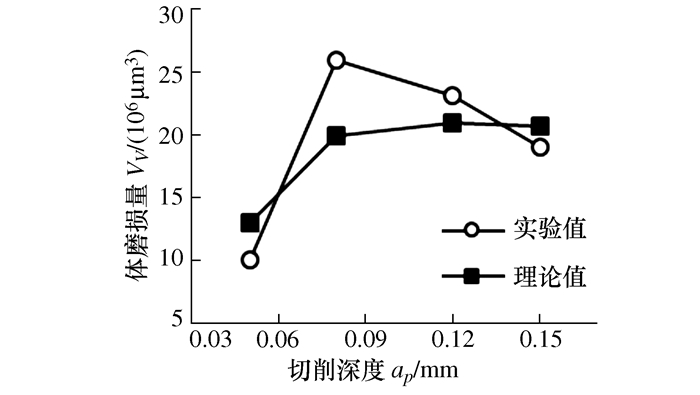
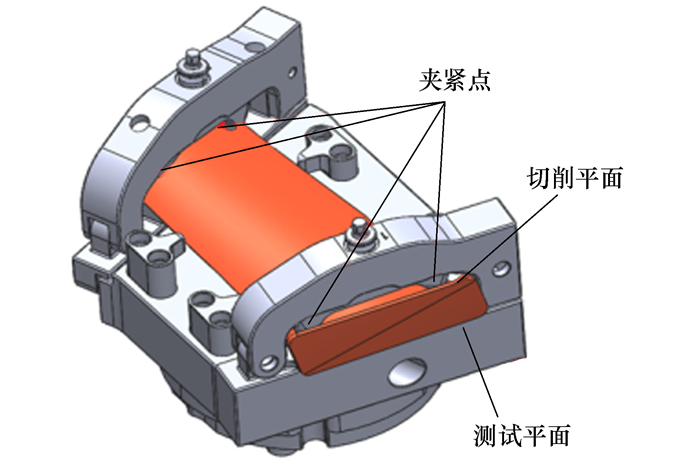
使用硬质合金刀具对二硅酸锂玻璃陶瓷和氟金云母陶瓷进行车削实验,利用激光共聚焦检测系统观察刀具磨损形貌,研究刀具磨损机理。提出刀具磨损机制,即在工件待加工表面硬质点多次划擦作用下导致的疲劳磨损,刀具磨损形式为后刀面接触区的逐层剥落。通过赫兹接触理论和摩擦疲劳学建立了一种刀具磨损理论模型,而后在不同切削参数下进行车削实验,验证理论模型的有效性,分析切削参数对刀具磨损的影响。结果表明:理论模型计算值可以良好地预测刀具磨损量,模型预测曲线与实际磨损曲线趋势相符。
使用硬质合金刀具对二硅酸锂玻璃陶瓷和氟金云母陶瓷进行车削实验,利用激光共聚焦检测系统观察刀具磨损形貌,研究刀具磨损机理。提出刀具磨损机制,即在工件待加工表面硬质点多次划擦作用下导致的疲劳磨损,刀具磨损形式为后刀面接触区的逐层剥落。通过赫兹接触理论和摩擦疲劳学建立了一种刀具磨损理论模型,而后在不同切削参数下进行车削实验,验证理论模型的有效性,分析切削参数对刀具磨损的影响。结果表明:理论模型计算值可以良好地预测刀具磨损量,模型预测曲线与实际磨损曲线趋势相符。


2020, 39(1): 88-95.
doi: 10.13433/j.cnki.1003-8728.20190091
摘要:
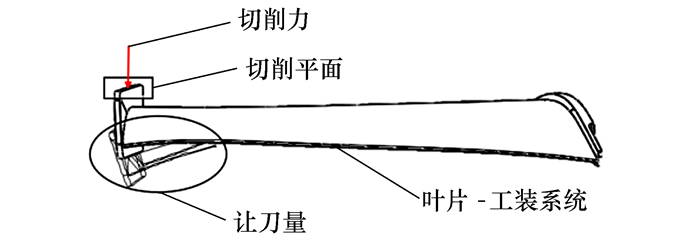
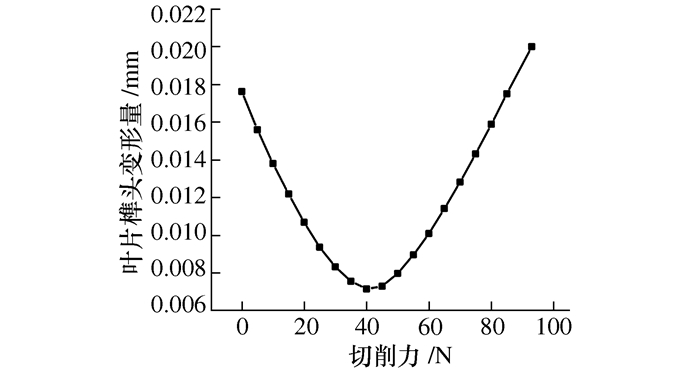
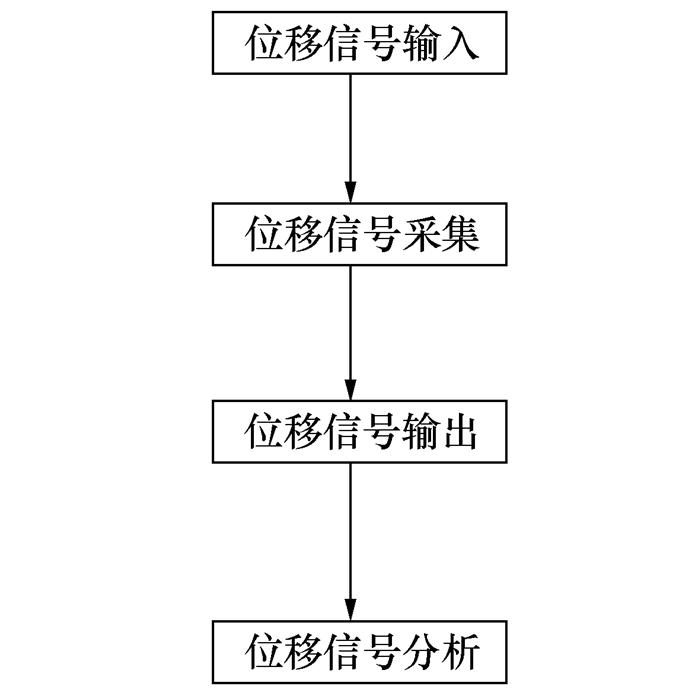
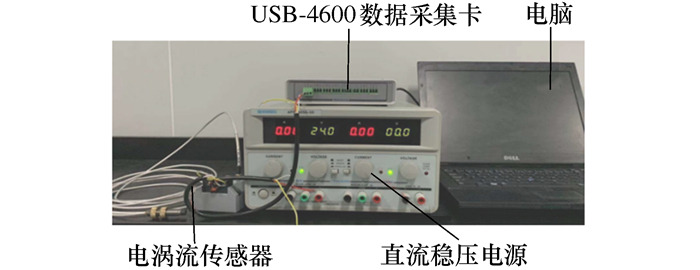
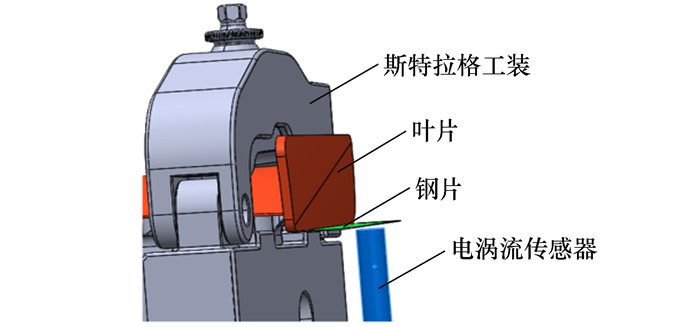
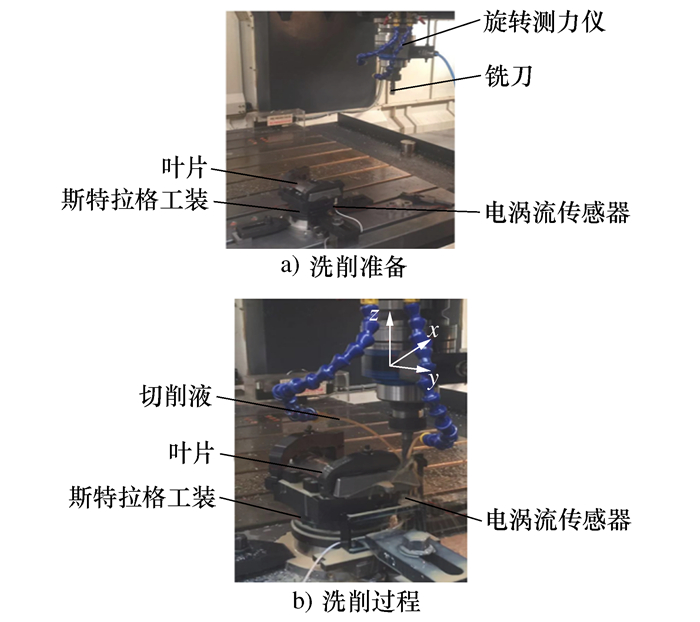
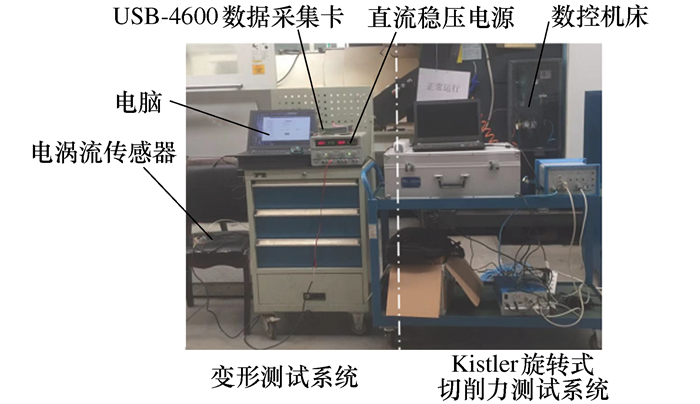
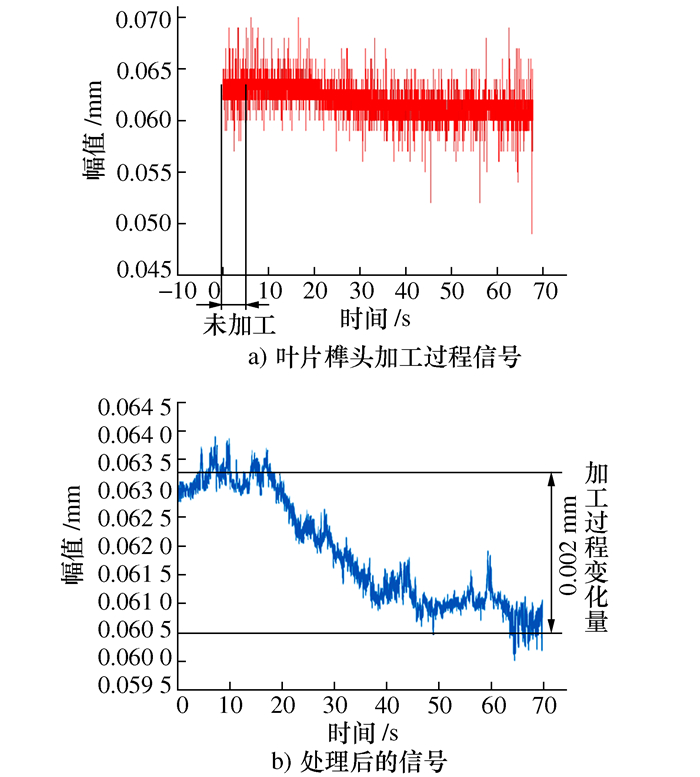
针对由航空发动机叶片工装刚度低,导致加工过程中叶片受切削力影响产生的变形问题,本文研究并集成了一款用以高分辨率变形量的位移传感器测试系统,监测加工过程中高频的切削力对高频位移信号的影响关系,实现对叶片工装的评价和设计指导。首先,介绍了航空发动机精锻叶片在多点定位夹紧工装中,加工榫头时产生的叶片变形与切削力对应关系问题。其次,通过仿真分析确定叶片榫头发生最大变形时,切削力在叶片榫头的施加位置。再次,根据切削力和变形对测试系统的采样频率、分辨率及其测试精度的要求,选择合适的位移传感器。并通过选择的位移传感器类型挑选数据采集卡,搭建起叶片变形测试系统。最后,开展叶片榫头加工实验,测试在切削力下叶片榫头的变形情况,得出了切削力与叶片榫头变形关系,验证了测试系统的可行性。并阐述测试中存在的问题并进行改进,同时对未来自主搭建叶片榫头加工测试系统提出合理化建议。
针对由航空发动机叶片工装刚度低,导致加工过程中叶片受切削力影响产生的变形问题,本文研究并集成了一款用以高分辨率变形量的位移传感器测试系统,监测加工过程中高频的切削力对高频位移信号的影响关系,实现对叶片工装的评价和设计指导。首先,介绍了航空发动机精锻叶片在多点定位夹紧工装中,加工榫头时产生的叶片变形与切削力对应关系问题。其次,通过仿真分析确定叶片榫头发生最大变形时,切削力在叶片榫头的施加位置。再次,根据切削力和变形对测试系统的采样频率、分辨率及其测试精度的要求,选择合适的位移传感器。并通过选择的位移传感器类型挑选数据采集卡,搭建起叶片变形测试系统。最后,开展叶片榫头加工实验,测试在切削力下叶片榫头的变形情况,得出了切削力与叶片榫头变形关系,验证了测试系统的可行性。并阐述测试中存在的问题并进行改进,同时对未来自主搭建叶片榫头加工测试系统提出合理化建议。





2020, 39(1): 96-101.
doi: 10.13433/j.cnki.1003-8728.20190316
摘要:
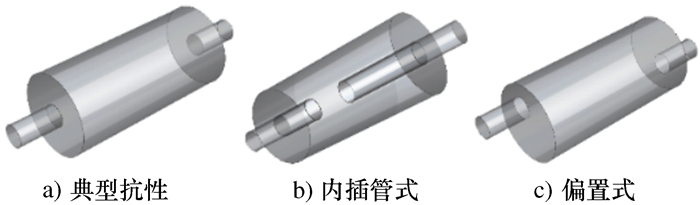
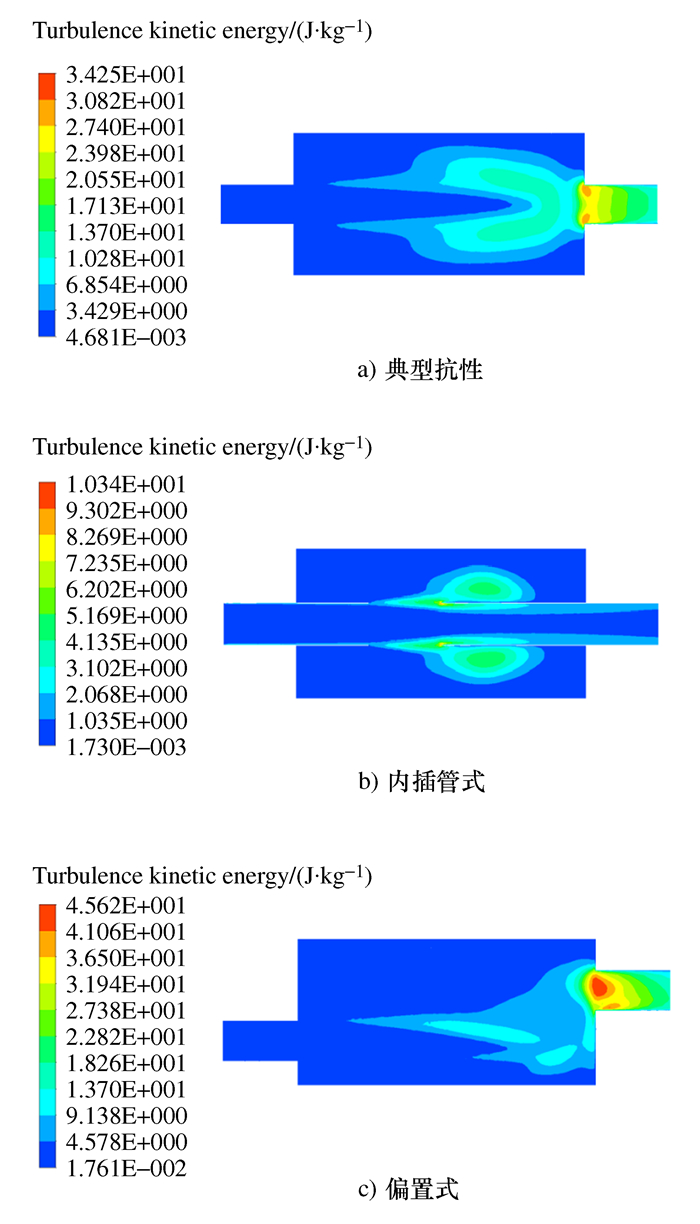
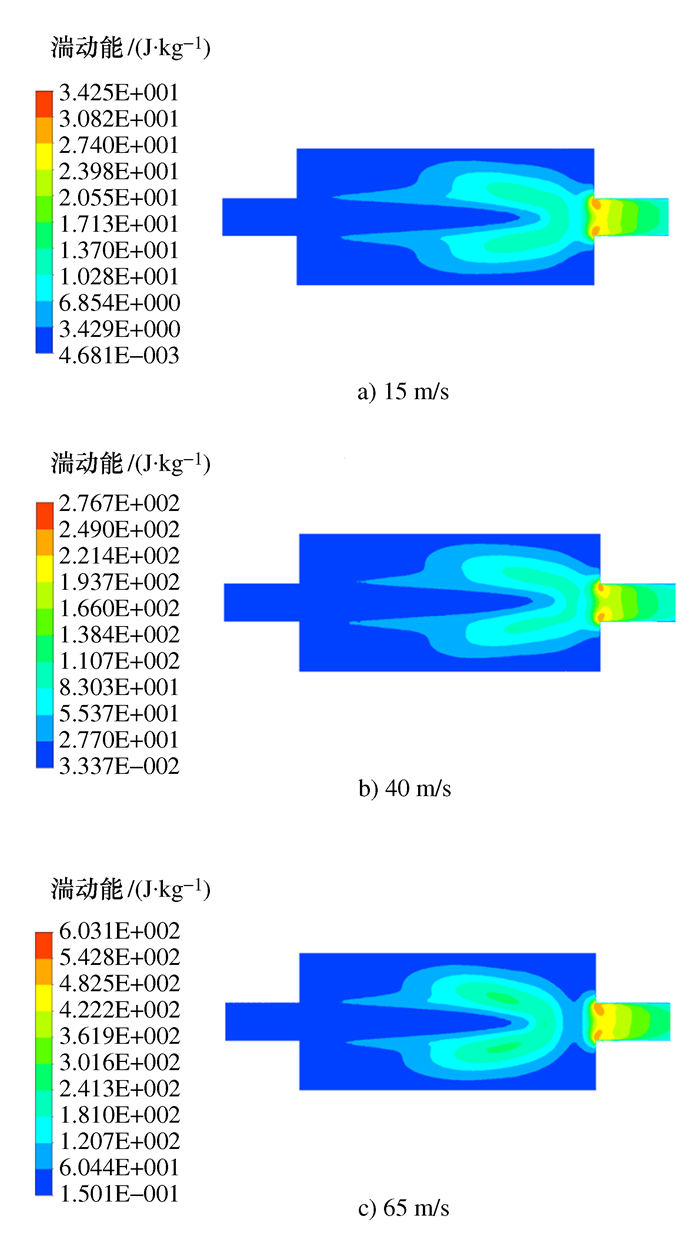
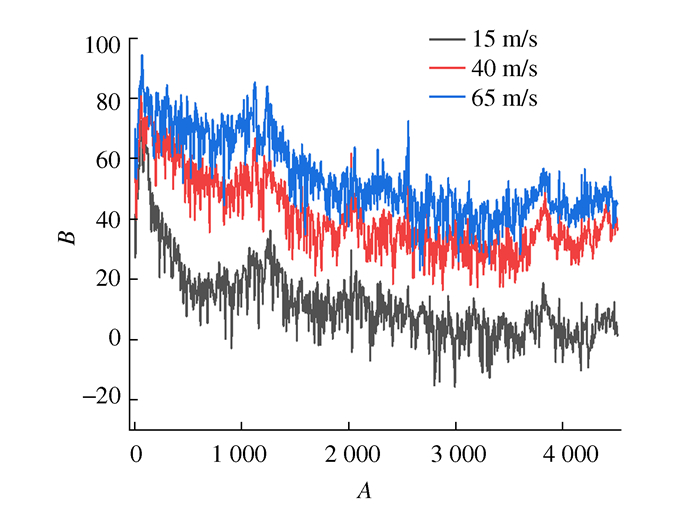
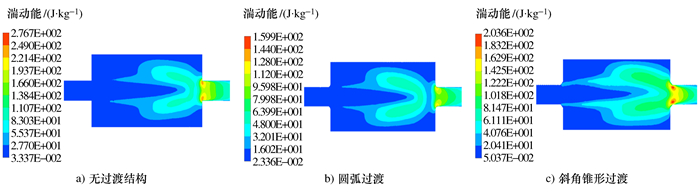
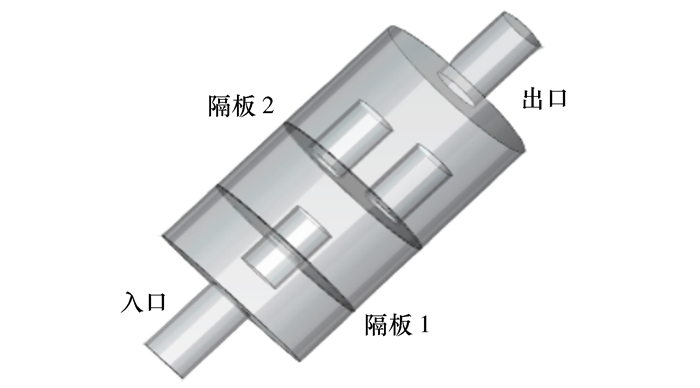
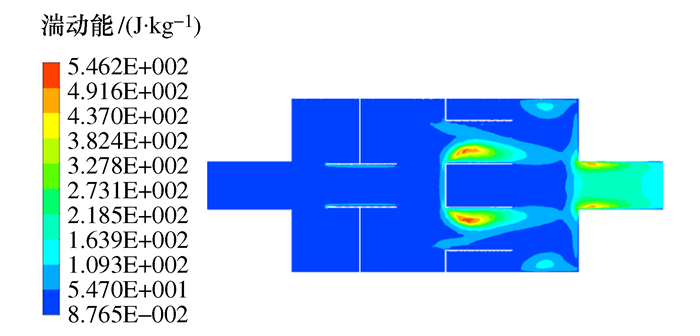
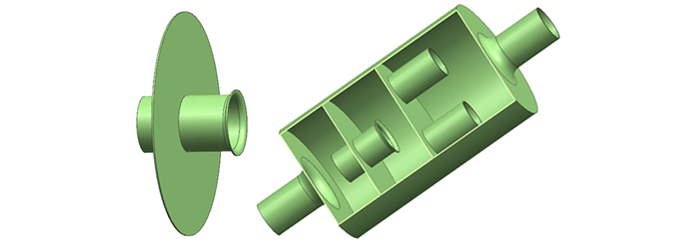
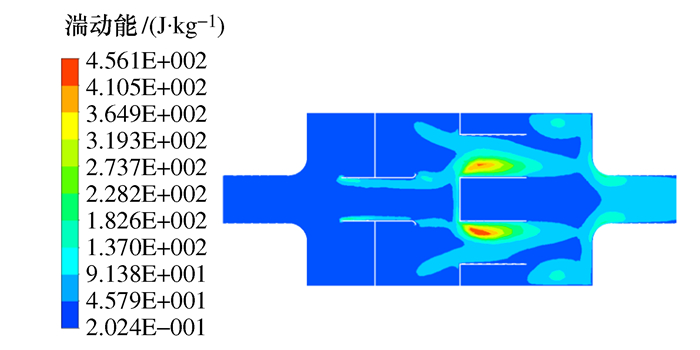
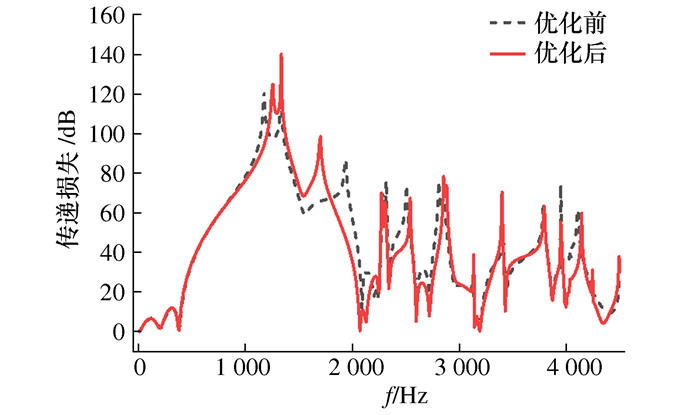
消声器的声学性能受到再生噪声的影响,为了提高消声器的实际使用性能,采用LES-FEM法对膨胀室消声器的气流再生噪声进行探究。首先对单膨胀室消声器分析了结构、流速及扩张腔过渡结构对再生噪声的影响。结果表明:内插管消声器产生的湍动能和再生噪声最小;流速增大使得消声器湍动能和再生噪声声功率级增大;采取圆弧过渡能更好地改善中高频段的再生噪声。其次对多腔膨胀室消声器进行了再生噪声分析优化,根据最大湍流的发生处对内插管末端和入出口管增加不同大小的圆弧结构,消声器再生噪声总声功率级降低9.44 dB,降噪效果显著。
消声器的声学性能受到再生噪声的影响,为了提高消声器的实际使用性能,采用LES-FEM法对膨胀室消声器的气流再生噪声进行探究。首先对单膨胀室消声器分析了结构、流速及扩张腔过渡结构对再生噪声的影响。结果表明:内插管消声器产生的湍动能和再生噪声最小;流速增大使得消声器湍动能和再生噪声声功率级增大;采取圆弧过渡能更好地改善中高频段的再生噪声。其次对多腔膨胀室消声器进行了再生噪声分析优化,根据最大湍流的发生处对内插管末端和入出口管增加不同大小的圆弧结构,消声器再生噪声总声功率级降低9.44 dB,降噪效果显著。



2020, 39(1): 102-108.
doi: 10.13433/j.cnki.1003-8728.20190077
摘要:
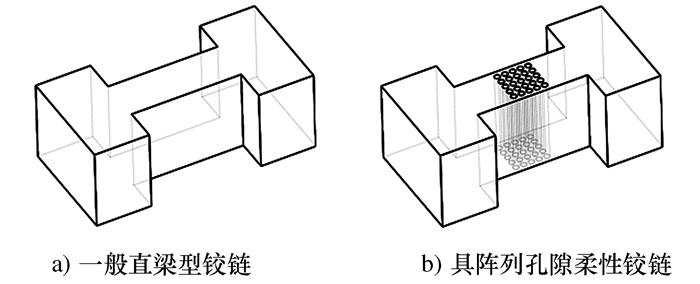
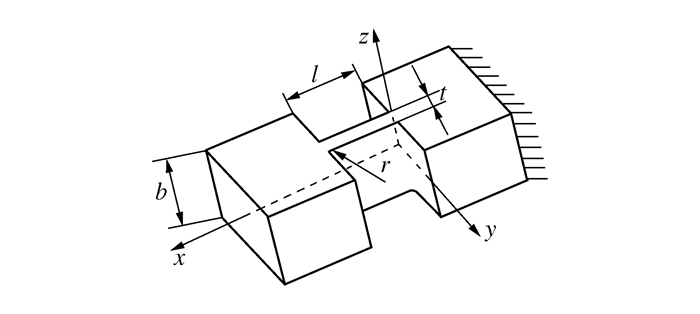
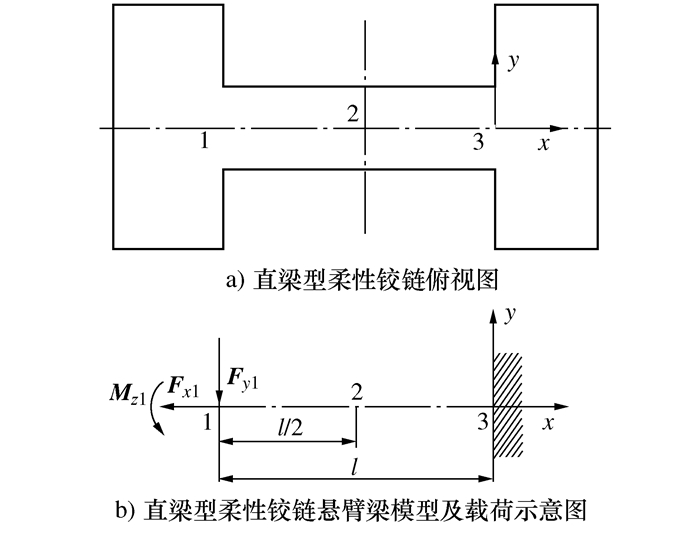
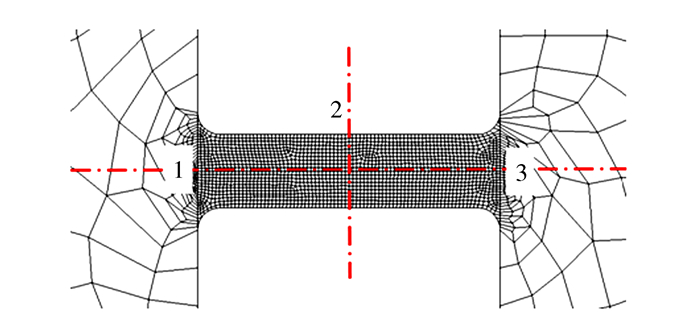
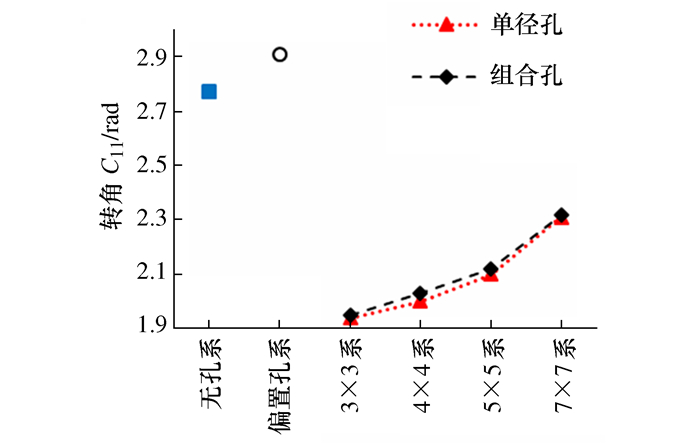
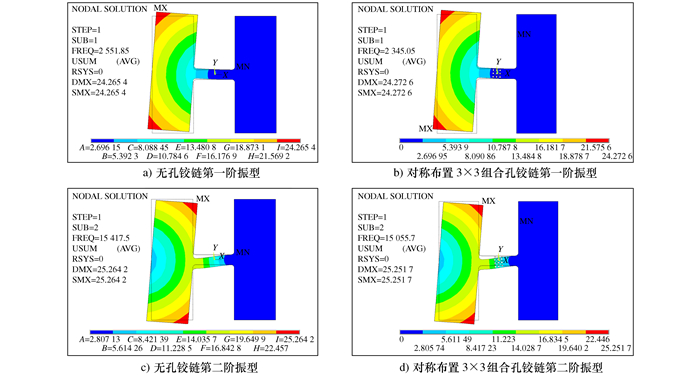
针对直梁型柔性铰链转动存在寄生位移难以实现微机电系统机构高精度运动应用,基于直梁圆角型柔性铰链,提出含平面对称孔隙或偏置孔隙结构、具有局部泊松比特征的新型柔性铰链。结合柔性铰链闭环柔度方程构造对标柔性铰链有限元计算模型;对具有相同孔隙率但不同组合形式孔隙的柔性铰链进行旋转柔度、回转精度及模态分析。结果表明,相同孔隙率下,对称布置孔隙铰链的柔度、中心回转精度均高于偏置孔隙铰链,其中3×3对称布置孔隙结构可将铰链自由端挠度提升20%,中心回转精度提高11.97%;孔隙结构柔性铰链自由端载荷与该端位移呈近似线性关系。本研究为多孔异构形式新型柔性铰链在特定精度与受多向力场合应用提供新思路。
针对直梁型柔性铰链转动存在寄生位移难以实现微机电系统机构高精度运动应用,基于直梁圆角型柔性铰链,提出含平面对称孔隙或偏置孔隙结构、具有局部泊松比特征的新型柔性铰链。结合柔性铰链闭环柔度方程构造对标柔性铰链有限元计算模型;对具有相同孔隙率但不同组合形式孔隙的柔性铰链进行旋转柔度、回转精度及模态分析。结果表明,相同孔隙率下,对称布置孔隙铰链的柔度、中心回转精度均高于偏置孔隙铰链,其中3×3对称布置孔隙结构可将铰链自由端挠度提升20%,中心回转精度提高11.97%;孔隙结构柔性铰链自由端载荷与该端位移呈近似线性关系。本研究为多孔异构形式新型柔性铰链在特定精度与受多向力场合应用提供新思路。






2020, 39(1): 109-116.
doi: 10.13433/j.cnki.1003-8728.20190102
摘要:
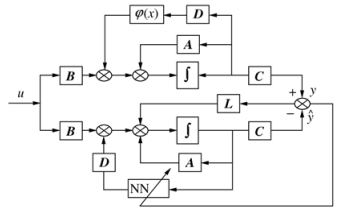
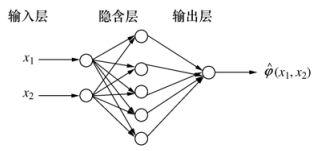
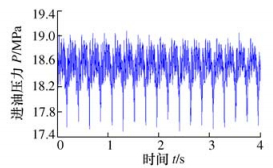
气液联合驱动的液压锤活塞密封于液压油缸内,用于转换液压能为冲击能,难以用传感器直接测量其运动状态(位移、速度)和未建模动态(包括摩擦阻力等各种阻力,为非线性项)。为此,建立活塞的动力学模型,分解动力学模型为线性部分和非线性部分,利用观测器理论结合神经网络的方法,设计径向基函数神经网络扩张的观测器,神经网络位于观测器的反馈通道用来逼近未知动态模型,把物理参数测量问题转化为活塞运动状态的估计和未知动态建模。推导并简化神经网络权重训练自适应算法,在线调整神经网络权重。构造Lyapunov函数,分析了神经网络扩张观测器误差的有界性和动态收敛特征。观测器应用于Van der Pol混沌振子系统的状态估计,仿真结果验证了自适应神经网络扩张观测器算法的有效性。在气液驱动液压锤活塞冲击能测量中的应用表明:神经网络扩张观测器能够有效地估计活塞位置与速度,从而实现了液压锤冲击能量的测量和未知动态检测。
气液联合驱动的液压锤活塞密封于液压油缸内,用于转换液压能为冲击能,难以用传感器直接测量其运动状态(位移、速度)和未建模动态(包括摩擦阻力等各种阻力,为非线性项)。为此,建立活塞的动力学模型,分解动力学模型为线性部分和非线性部分,利用观测器理论结合神经网络的方法,设计径向基函数神经网络扩张的观测器,神经网络位于观测器的反馈通道用来逼近未知动态模型,把物理参数测量问题转化为活塞运动状态的估计和未知动态建模。推导并简化神经网络权重训练自适应算法,在线调整神经网络权重。构造Lyapunov函数,分析了神经网络扩张观测器误差的有界性和动态收敛特征。观测器应用于Van der Pol混沌振子系统的状态估计,仿真结果验证了自适应神经网络扩张观测器算法的有效性。在气液驱动液压锤活塞冲击能测量中的应用表明:神经网络扩张观测器能够有效地估计活塞位置与速度,从而实现了液压锤冲击能量的测量和未知动态检测。








2020, 39(1): 124-128.
doi: 10.13433/j.cnki.1003-8728.20190082
摘要:
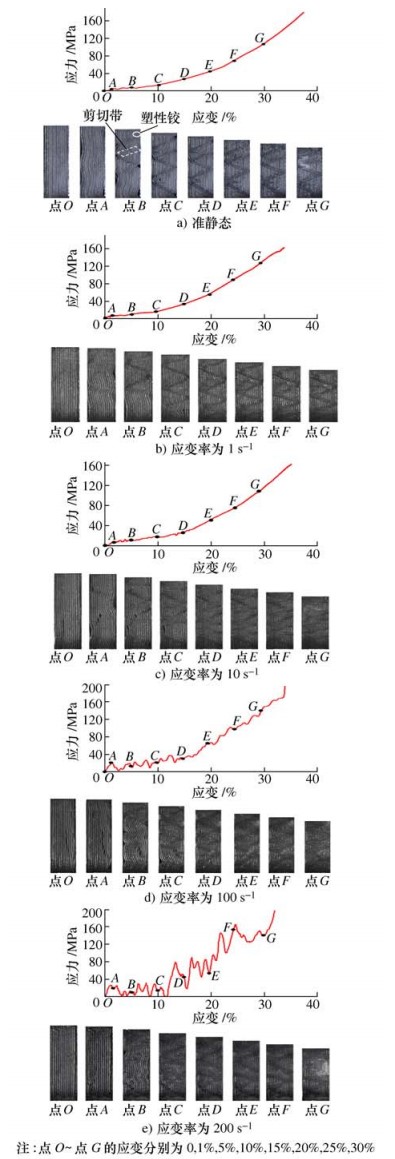
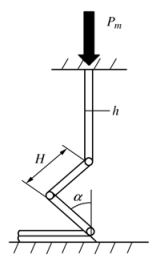
通过对电动汽车用磷酸铁锂电池单体内部卷芯代表性体积单元试件做在面内方向的约束压缩测试,研究了电池单体卷芯的静动态压缩特性。试验结果研究表明,试件的变形行为主要包括屈曲,塑性铰和相应剪切带的形成以及卷芯组分材料的密实化。试件的静动态压缩的力学响应具有显著的差异,主要表现为随着加载速度的增大应力增强明显,试件的变形模式发生改变。最后,利用试件结构的惯性效应和试件材料的应变率效应解释了试件在约束压缩试验中产生的这种动态效应。
通过对电动汽车用磷酸铁锂电池单体内部卷芯代表性体积单元试件做在面内方向的约束压缩测试,研究了电池单体卷芯的静动态压缩特性。试验结果研究表明,试件的变形行为主要包括屈曲,塑性铰和相应剪切带的形成以及卷芯组分材料的密实化。试件的静动态压缩的力学响应具有显著的差异,主要表现为随着加载速度的增大应力增强明显,试件的变形模式发生改变。最后,利用试件结构的惯性效应和试件材料的应变率效应解释了试件在约束压缩试验中产生的这种动态效应。






2020, 39(1): 129-136.
doi: 10.13433/j.cnki.1003-8728.20190098
摘要:
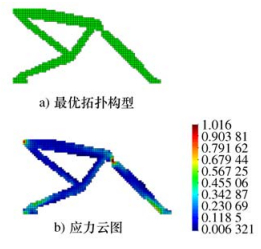
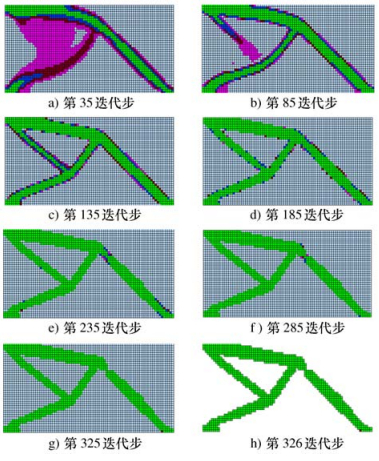
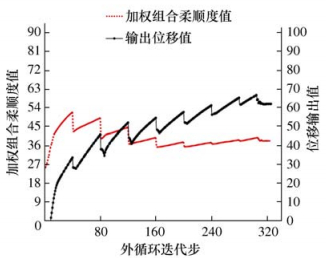
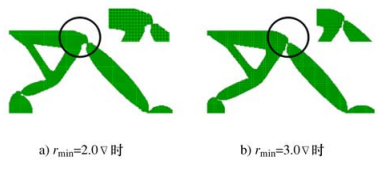
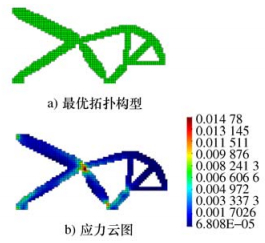
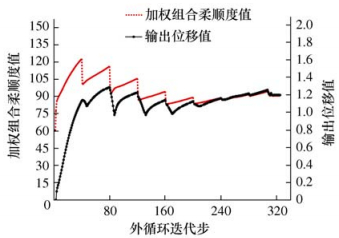
现有柔性机构拓扑优化方法在解决柔性机构拓扑优化的类铰链和灰度问题仍存在一些困难。为获得清晰和不含类铰链的优化拓扑,提出了一种构型平稳变化的结构拓扑优化求解方法。首先,构建了一种能综合表征柔性机构输入和输出端的局部刚度特性的加权组合柔顺度函数;而后,引入加权组合柔顺度的小量变化约束、Heaviside密度映射和变约束限方案,建立了柔性机构构型平稳变化的优化模型;最后结合MMA算法,形成了一种构型平稳变化的柔性机构拓扑优化方法。给出的算例结果表明,相比于现有方法,该方法计算公式简单,可获得清晰且无类铰链的拓扑构型。
现有柔性机构拓扑优化方法在解决柔性机构拓扑优化的类铰链和灰度问题仍存在一些困难。为获得清晰和不含类铰链的优化拓扑,提出了一种构型平稳变化的结构拓扑优化求解方法。首先,构建了一种能综合表征柔性机构输入和输出端的局部刚度特性的加权组合柔顺度函数;而后,引入加权组合柔顺度的小量变化约束、Heaviside密度映射和变约束限方案,建立了柔性机构构型平稳变化的优化模型;最后结合MMA算法,形成了一种构型平稳变化的柔性机构拓扑优化方法。给出的算例结果表明,相比于现有方法,该方法计算公式简单,可获得清晰且无类铰链的拓扑构型。






2020, 39(1): 137-143.
doi: 10.13433/j.cnki.1003-8728.20190089
摘要:
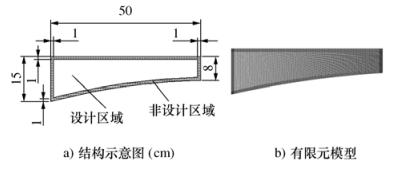
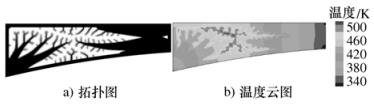
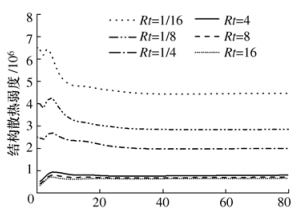
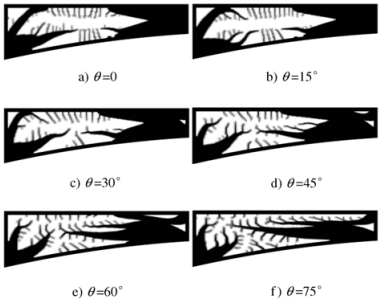
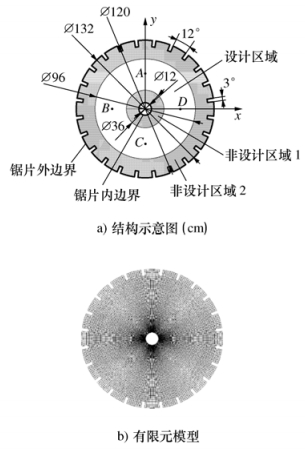
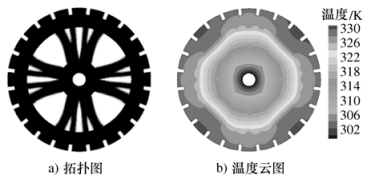
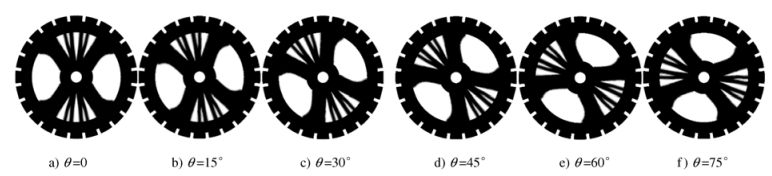
基于变密度法建立了正交各向异性材料结构的稳态传热拓扑优化模型,完成了变截面梁和圆锯片的传热拓扑优化,散热弱度最大分别降低了68.78%和74.82%,同时减重39.03%和23.75%;重点研究了各向异性因子和材料方向角对各向异性材料结构最优拓扑构型及散热效果的影响。结果表明:散热效果均随各向异性因子增加而增强,当各向异性因子小于和大于1时,各向异性材料结构的散热性能分别劣于和优于各向同性材料结构。变截面梁的材料方向角及各向异性因子对其最优拓扑构型及散热效果影响很大;而对于几何形状及热载荷均对称的圆锯片,其材料方向角对最优拓扑构型及温度分布无影响。变截面梁的材料方向角建议在60°~75°之间取值,在各向异性材料结构传热拓扑优化中,合理选择各向异性因子和材料方向角可获得较优拓扑构型。
基于变密度法建立了正交各向异性材料结构的稳态传热拓扑优化模型,完成了变截面梁和圆锯片的传热拓扑优化,散热弱度最大分别降低了68.78%和74.82%,同时减重39.03%和23.75%;重点研究了各向异性因子和材料方向角对各向异性材料结构最优拓扑构型及散热效果的影响。结果表明:散热效果均随各向异性因子增加而增强,当各向异性因子小于和大于1时,各向异性材料结构的散热性能分别劣于和优于各向同性材料结构。变截面梁的材料方向角及各向异性因子对其最优拓扑构型及散热效果影响很大;而对于几何形状及热载荷均对称的圆锯片,其材料方向角对最优拓扑构型及温度分布无影响。变截面梁的材料方向角建议在60°~75°之间取值,在各向异性材料结构传热拓扑优化中,合理选择各向异性因子和材料方向角可获得较优拓扑构型。





2020, 39(1): 144-149.
doi: 10.13433/j.cnki.1003-8728.20190084
摘要:
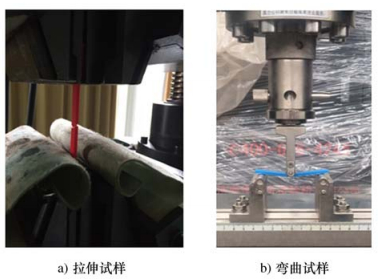
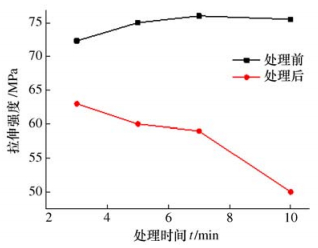
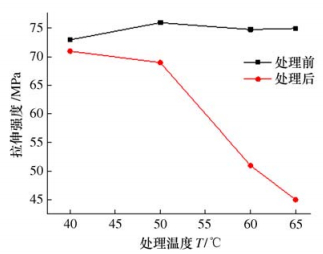
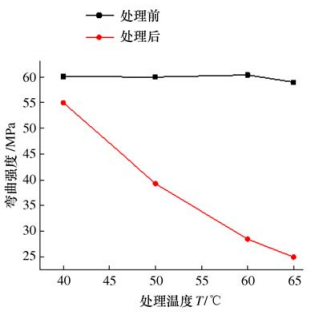
针对化学处理会影响熔融沉积成型(Fused deposition modeling,FDM)零件力学性能的问题,采用氯仿溶液对FDM成型件表面进行热蒸汽处理,分别研究化学处理时间、化学处理温度和抛光液浓度对FDM成型件的拉伸强度和弯曲强度的影响。结果表明:化学处理后,成型件拉伸强度、弯曲强度均有所降低。随着处理时间、处理温度和抛光液浓度的增加,成型件拉伸强度、弯曲强度减小;当处理时间为10 min、处理温度为60℃时,抛光液浓度对成型件拉伸强度和弯曲强度的影响较小。
针对化学处理会影响熔融沉积成型(Fused deposition modeling,FDM)零件力学性能的问题,采用氯仿溶液对FDM成型件表面进行热蒸汽处理,分别研究化学处理时间、化学处理温度和抛光液浓度对FDM成型件的拉伸强度和弯曲强度的影响。结果表明:化学处理后,成型件拉伸强度、弯曲强度均有所降低。随着处理时间、处理温度和抛光液浓度的增加,成型件拉伸强度、弯曲强度减小;当处理时间为10 min、处理温度为60℃时,抛光液浓度对成型件拉伸强度和弯曲强度的影响较小。







2020, 39(1): 150-156.
doi: 10.13433/j.cnki.1003-8728.20190083
摘要:
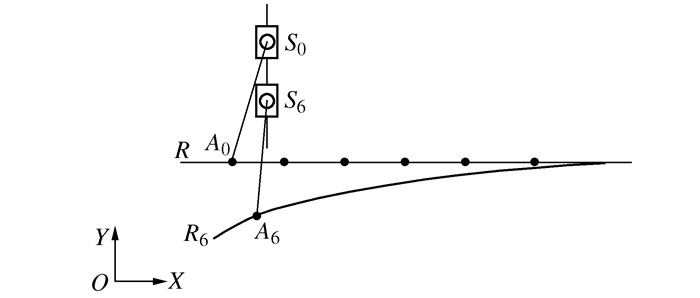
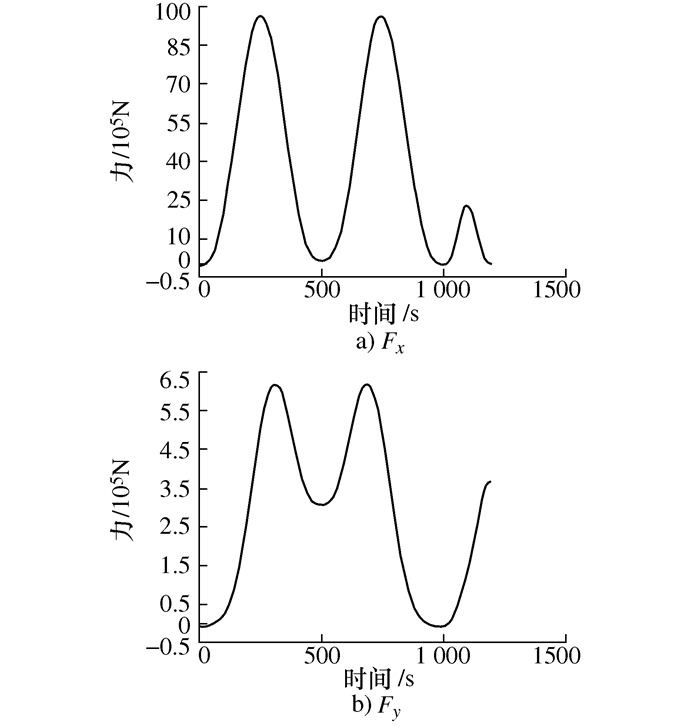
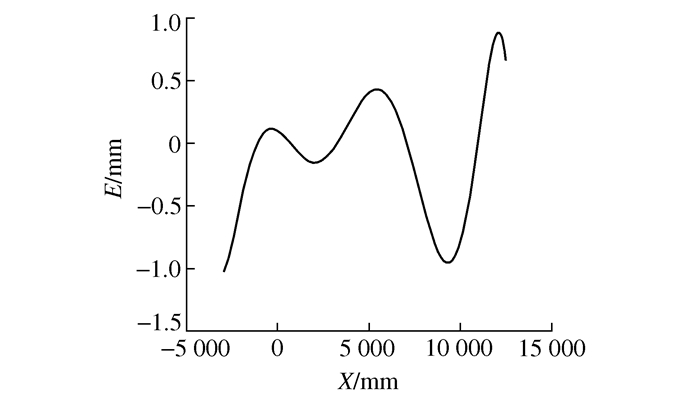
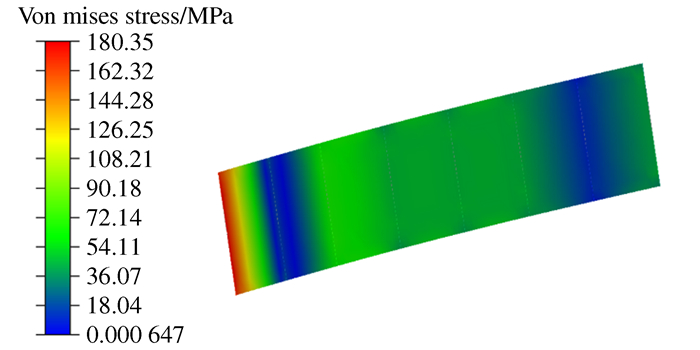
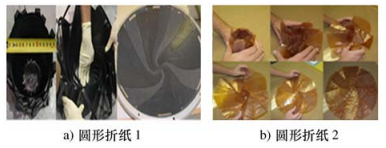
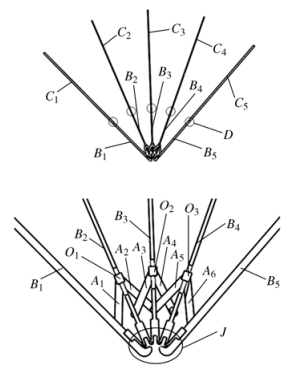
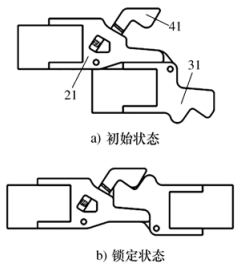
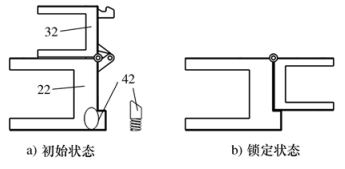
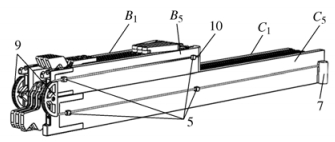
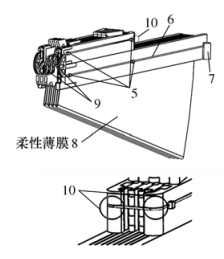
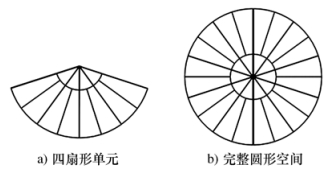
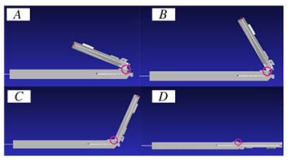
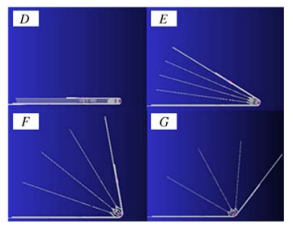
随着航天事业的发展,越来越多的宇航工程中会应用一些大型的在轨机构,以满足不同的任务需求,本文设计了一种可应用于航天器太阳翼的圆形空间展开机构。主要包括同步机构的设计、自锁铰链的设计以及驱动机构的设计,最后基于Adams以及RecurDyn两种多体动力学仿真软件分别对本文所设计的驱动机构和四单元扇形空间展开机构进行了动力学仿真,结果表明本文所设计的空间展开机构可实现多级展开,并具有展开的可靠性和可控性。
随着航天事业的发展,越来越多的宇航工程中会应用一些大型的在轨机构,以满足不同的任务需求,本文设计了一种可应用于航天器太阳翼的圆形空间展开机构。主要包括同步机构的设计、自锁铰链的设计以及驱动机构的设计,最后基于Adams以及RecurDyn两种多体动力学仿真软件分别对本文所设计的驱动机构和四单元扇形空间展开机构进行了动力学仿真,结果表明本文所设计的空间展开机构可实现多级展开,并具有展开的可靠性和可控性。









2020, 39(1): 157-164.
doi: 10.13433/j.cnki.1003-8728.20190080
摘要:
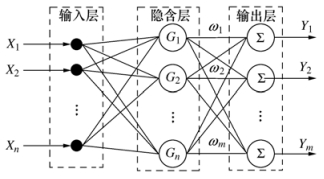
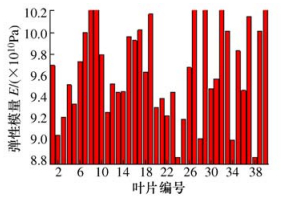
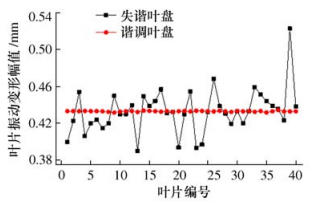
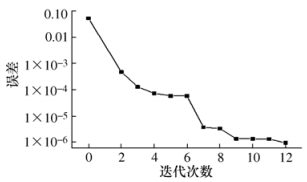
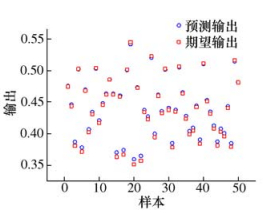
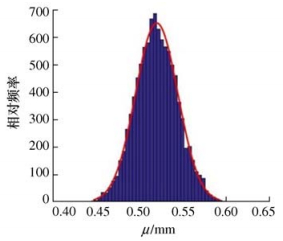
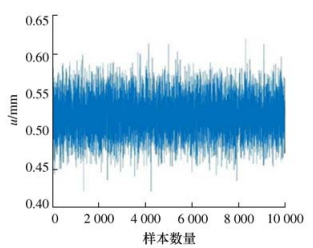
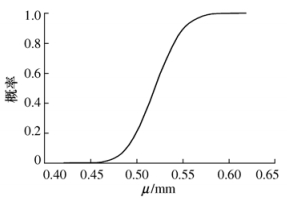
为了研究随机刚度失谐对叶盘振动可靠性的影响,将径向基函数神经网络与极值响应面结合提出了径向基极值响应面法。选取叶盘材料密度、工作转速、激振力幅值作为随机输入变量,叶盘振幅极值为输出响应,利用拉丁超立方抽样法抽取不同输入样本点,通过有限元分析计算得到各样本点对应的振幅极值响应,用抽取的样本点构建径向基极值响应面,并结合蒙特卡洛法对随机变量进行大批量抽样,将其带入径向基极值响应面分析得到叶盘振动可靠度。结果表明,在随机刚度失谐因素影响下,叶盘振动可靠性降低,更容易发生振动失效。通过与蒙特卡洛法、极值响应面法进行对比,得出径向基极值响应面在保证计算精度的情况下提高了计算效率。
为了研究随机刚度失谐对叶盘振动可靠性的影响,将径向基函数神经网络与极值响应面结合提出了径向基极值响应面法。选取叶盘材料密度、工作转速、激振力幅值作为随机输入变量,叶盘振幅极值为输出响应,利用拉丁超立方抽样法抽取不同输入样本点,通过有限元分析计算得到各样本点对应的振幅极值响应,用抽取的样本点构建径向基极值响应面,并结合蒙特卡洛法对随机变量进行大批量抽样,将其带入径向基极值响应面分析得到叶盘振动可靠度。结果表明,在随机刚度失谐因素影响下,叶盘振动可靠性降低,更容易发生振动失效。通过与蒙特卡洛法、极值响应面法进行对比,得出径向基极值响应面在保证计算精度的情况下提高了计算效率。