




Simulation Analysis of Contact Force of Semi-flexible Wall Nozzle Throat
-
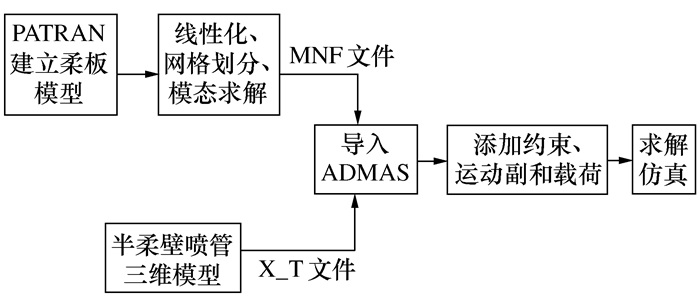
摘要: 在刚柔耦合动力学理论基础上,联合PATRAN/NASTRAN与ADAMS软件对喉块柔板进行动力学仿真,让喉块与柔板运动到目标位置,仿真结果显示,忽略喉块和柔板接触点运动轨迹规划,会使得喉块与柔板连接处接触力过大不满足要求。为此对喉块与柔板接触点运动轨迹进行轨迹规划,考虑喉块和柔板的运动协调性,调整喉块和柔板接触点运动轨迹,结果表明:该方法既满足喉块与柔板接触力大小,又能保证喉块和柔板的型面精度,为喉块柔板协调运动提供必要的理论依据。Abstract: Based on the theory of rigid-flexible coupling dynamics, the PATRAN/NASTRAN and ADAMS software are used to simulate the dynamics of the laryngeal plate, so that the laryngeal block and the flexible plate move to the target position. The simulation results show that if the contact point motion trajectory of laryngeal block and the flexible plate is ignored, the calculated contact force between the laryngeal block and the flexible plate will be too large to meet the requirements. To this end, the trajectory planning of the contact trajectory of the laryngeal block and the flexible plate is considered. Considering the motion coordination of the laryngeal block and the flexible plate, the trajectory of the laryngeal block and the flexible plate contact point is adjusted. The results show that the method satisfies both the laryngeal block and the flexible plate, the contact force can ensure the profile accuracy of the laryngeal block and the flexible plate. This study provides the necessary theoretical basis for the coordinated movement of the laryngeal block.
-
Key words:
- ADAMS /
- rigid-flexible coupling /
- contact force /
- track naturalization /
- simulation /
- nozzle throat
-
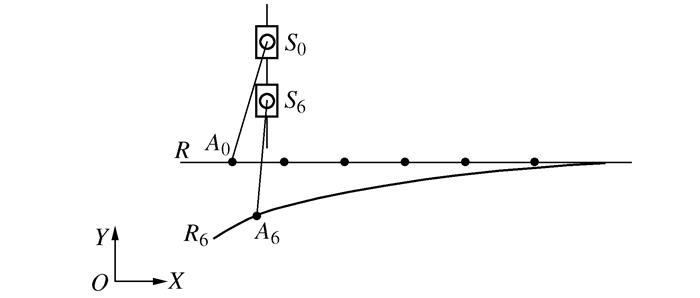
表 1 柔板前6组铰点位置
柔板铰点 1 2 3 4 5 6 铰点坐标 xi 0.019 0.099 0.405 1.201 2.773 4.698 yi -5.84 -19.11 -46.011 -88.86 -148.59 -208.65  下载: 导出CSV
下载: 导出CSV
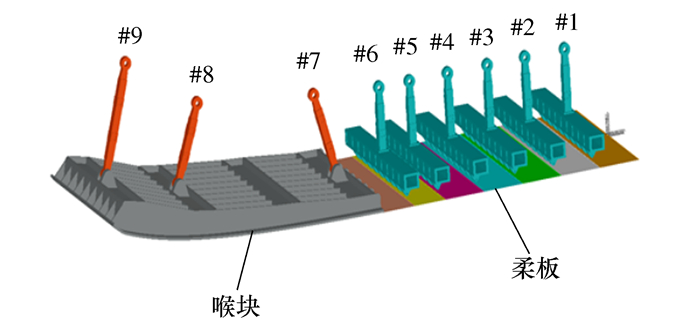
表 2 9组滑块位移
滑块 1 2 3 4 5 6 7 8 9 位移/mm -5.837 -19.11 -46.01 -88.86 -148.6 -208.6 -350 -520 -659
下载: 导出CSV
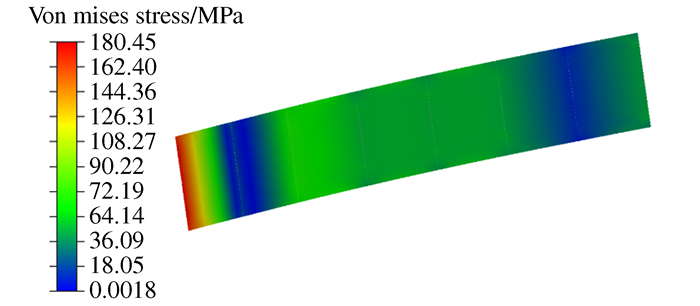
表 3 规划前后对比
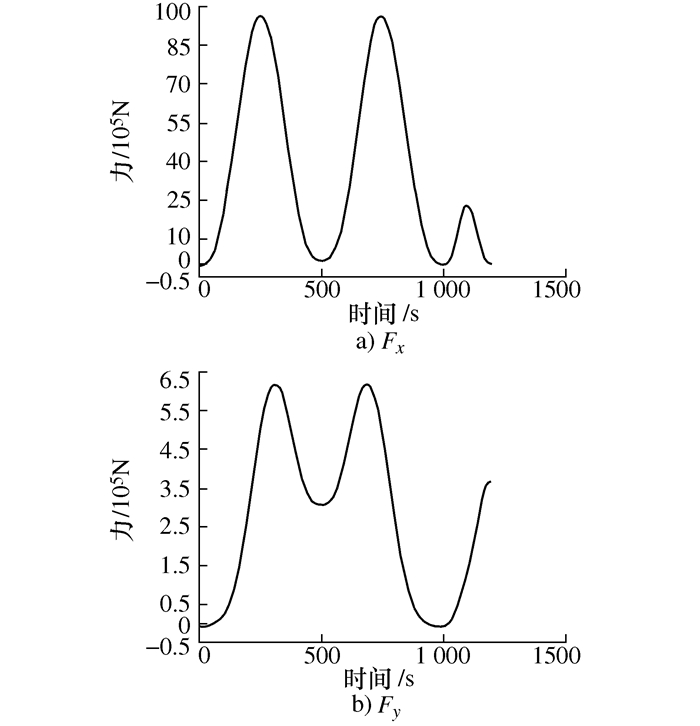
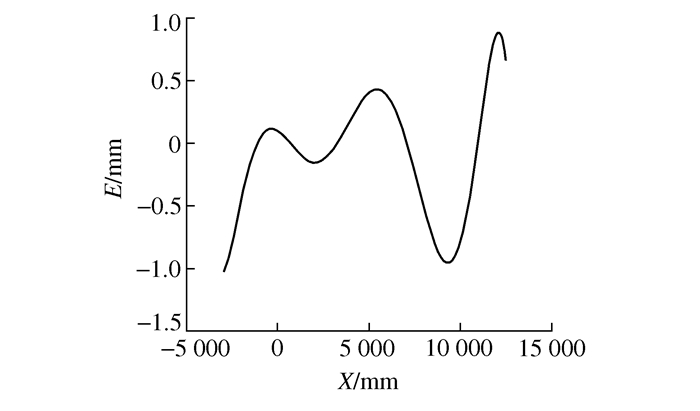
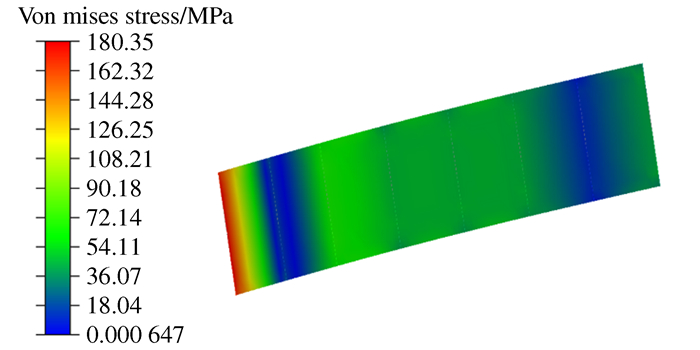
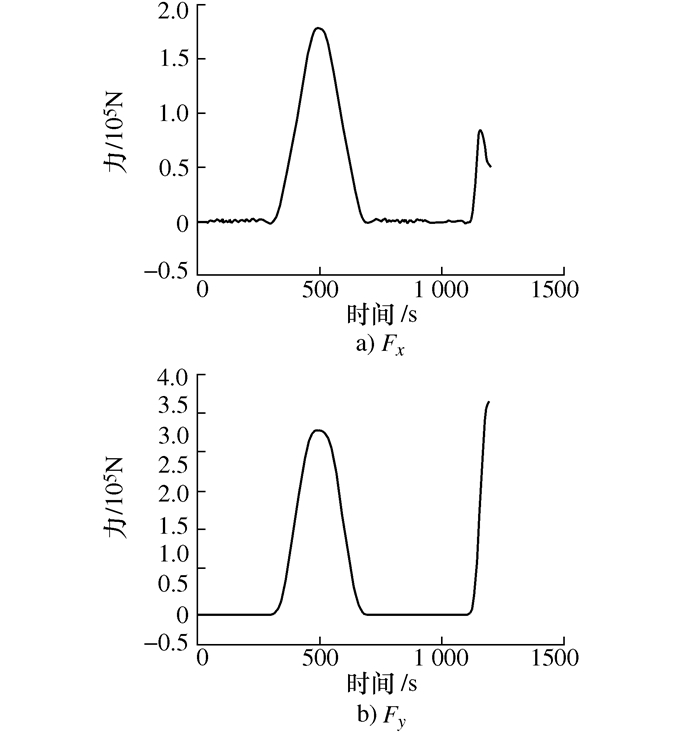
指标类型 柔板应力/MPa X向最大接触力/104N Y向最大接触力/105N 柔板与目标型面误差/mm 喉块与目标型面误差/mm 未规划 180.45 964.98 6.186 0.956 1.021 规划后 180.35 18 3.668 0.956 1.021
下载: 导出CSV
-
[1] Steeves C A, Timpano K H, Maxwell P T, et al. Design and manufacture of a morphing structure for a shape-adaptive supersonic wind tunnel nozzle[J]. Journal of Applied Mechanics, 2009, 76(3):031012 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6b57ec419bb9c19a77e0092bb7ed28f5 [2] Abbaspour M, Shojaee M N. Innovative approach to design a new national low speed wind tunnel[J]. International Journal of Environmental Science & Technology, 2009, 6(1):23-34 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_319a17a06b00c5c1adfcbc39822958e0 [3] 虞择斌, 刘政崇, 陈振华, 等.2m超声速风洞结构设计与研究[J].航空学报, 2013, 34(2):197-207 http://d.old.wanfangdata.com.cn/Periodical/hkxb201302001Yu Z B, Liu Z C, Chen Z H, et al. Structure design and research of 2 m supersonic wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(2):197-207(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hkxb201302001 [4] 虞择斌, 廖达雄, 刘政崇, 等.2m超声速风洞总体结构设计[J].实验流体力学, 2012, 26(2):90-96 http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201202020Yu Z B, Liao D X, Liu Z C, et al. The general structural design for 2m supersonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2012, 26(2):90-96(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201202020 [5] 聂旭涛, 郭隆德, 刘伯林.基于ADAMS风洞柔壁喷管动力学仿真分析[J].实验流体力学, 2011, 25(2):73-76 http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201102015Nie X T, Guo L D, Liu B L. Dynamics simulation and analysis of flexible nozzle in wind tunnel based on ADAMS[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(2):73-76(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201102015 [6] 彭强, 廖达雄, 秦红岗, 等.半柔壁喷管初步实验研究[J].实验流体力学, 2012, 26(3):101-106 http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201203019Peng Q, Liao D X, Qin H G, et al. The primary experimental research on the aerodynamic designing of semi-flexible nozzle[J]. Journal of Experiments in Fluid Mechanics, 2012, 26(3):101-106(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201203019 [7] 邢迪雄, 任志奇, 赵路佳.6-PSS并联机构的刚-柔耦合动力学建模及仿真[J].机床与液压, 2018, 46(17):48-52 http://d.old.wanfangdata.com.cn/Periodical/jcyyy201817011Xing D X, Ren Z Q, Zhao L J. Rigid-flexible coupling dynamic modeling and simulation of a 6-PSS parallel mechanism[J]. Machine Tool & Hydraulics, 2018, 46(17):48-52(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jcyyy201817011 [8] 张永德, 汪洋涛, 王沫楠, 等.基于ANSYS与ADAMS的柔性体联合仿真[J].系统仿真学报, 2008, 20(17):4501-4504 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtfzxb200817003Zhang Y D, Wang Y T, Wang M N, et al. Co-simulation of flexible body based on ANSYS and ADAMS[J]. Journal of System Simulation, 2008, 20(17):4501-4504(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtfzxb200817003 [9] 刘晓东, 章晓明.基于ADAMS与NASTRAN的刚柔耦合体动力学分析方法[J].机械设计与制造, 2008, (2):168-170 http://d.old.wanfangdata.com.cn/Periodical/jxsjyzz200802068Liu X D, Zhang X M. A method of flexible multi-body system dynamics analysis based on ADAMS and NASTRAN[J]. Machinery Design & Manufacture, 2008, (2):168-170(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxsjyzz200802068 [10] 姜自伟.机械系统动力学仿真柔性体建模技术研究[D].武汉: 华中科技大学, 2007 http://cdmd.cnki.com.cn/Article/CDMD-10487-2009039279.htmJiang Z W. Research on flexible body modeling in mechanical dynamics simulation system[D]. Wuhan: Huazhong University of Science and Technology, 2007(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10487-2009039279.htm [11] 洪嘉振.多体系统动力学[M].上海:上海交通大学出版社, 1992Hong J Z. Dynamics of multibody systems[M]. Shanghai:Shanghai Jiaotong University Press, 1992(in Chinese) [12] 黄真, 赵永生, 赵铁石.高等空间机构学[M].2版.北京:高等教育出版社, 2014Huang Z, Zhao Y S, Zhao T S. Advanced spatial mechanism[M]. 2nd ed. Beijing:Higher Education Press, 2014(in Chinese) [13] 陈伟华, 张铁, 崔敏其.基于五次多项式过渡的机器人轨迹规划的研究[J].煤矿机械, 2011, 32(12):49-50 http://d.old.wanfangdata.com.cn/Periodical/mkjx201112023Chen W H, Zhang T, Cui M Q. Study of robot trajectory based on quintic polynomial transition[J]. Coal Mine Machinery, 2011, 32(12):49-50(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/mkjx201112023 [14] 王燕伟.一种五自由度混联机器人的运动学分析与仿真[D].哈尔滨: 哈尔滨工业大学, 2013 http://www.cnki.com.cn/Article/CJFDTotal-HEBX201407001.htmWang Y W. Kinematics analysis and simulation of a 5-DOF hybrid robot[D]. Harbin: Harbin University of Technology, 2013(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-HEBX201407001.htm -


 点击查看大图
点击查看大图
图(10) / 表(3)
计量
- 文章访问数: 207
- HTML全文浏览量: 100
- PDF下载量: 22
- 被引次数: 0
