作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2022年 41卷 第12期
2022, 41(12): 1805-1814.
doi: 10.13433/j.cnki.1003-8728.20200527
 摘要
摘要 HTML
HTML PDF 8919KB
PDF 8919KB
摘要:
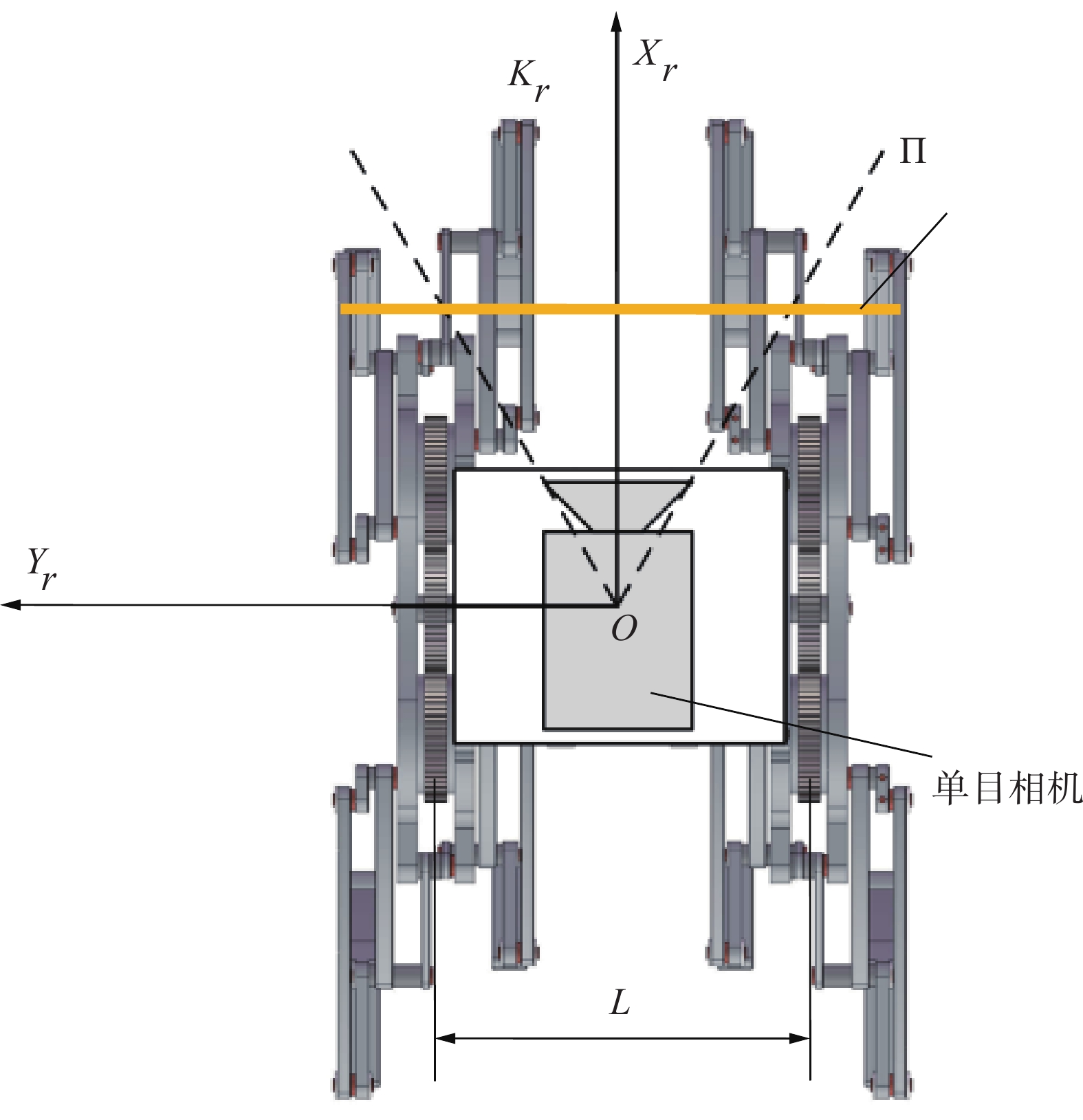
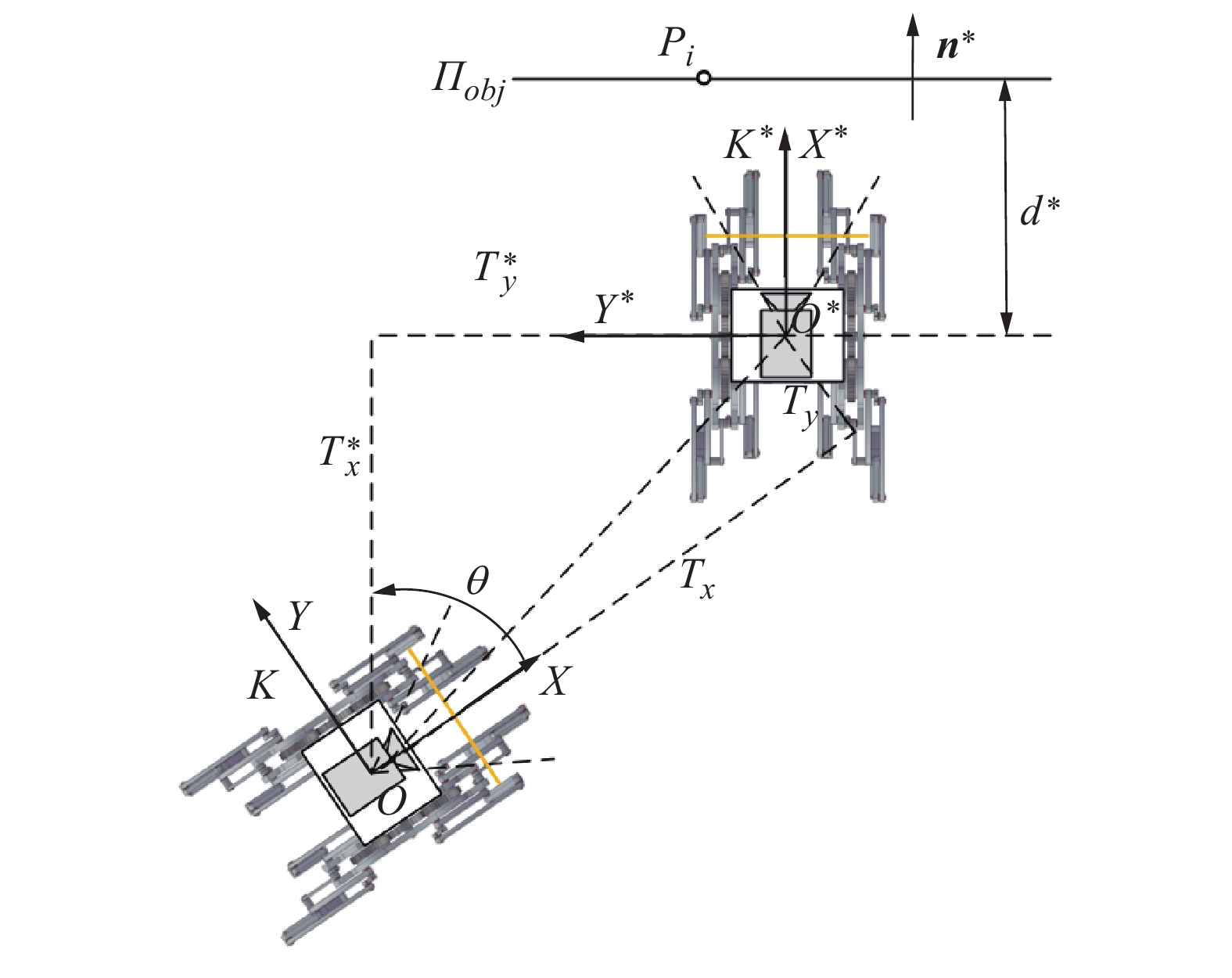
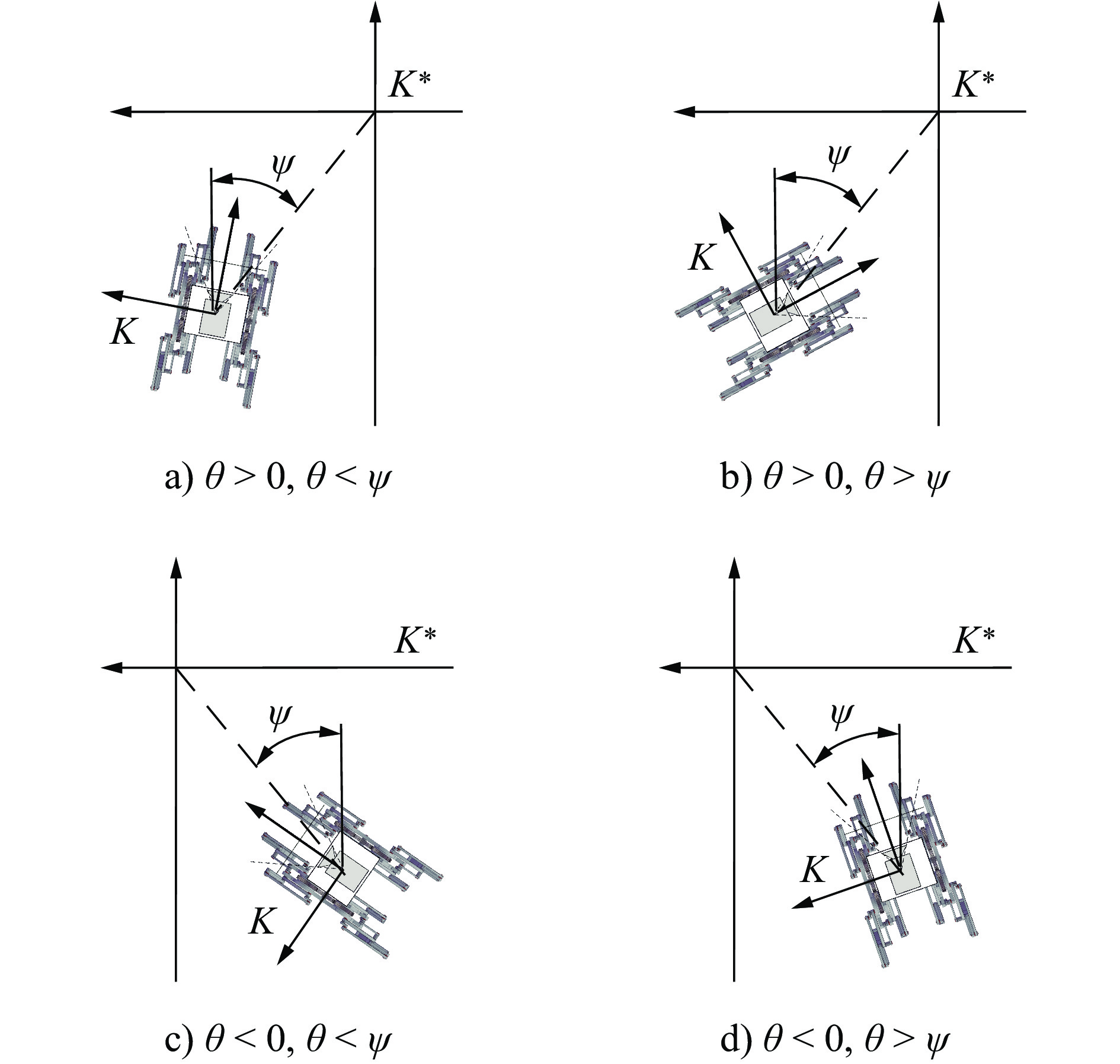
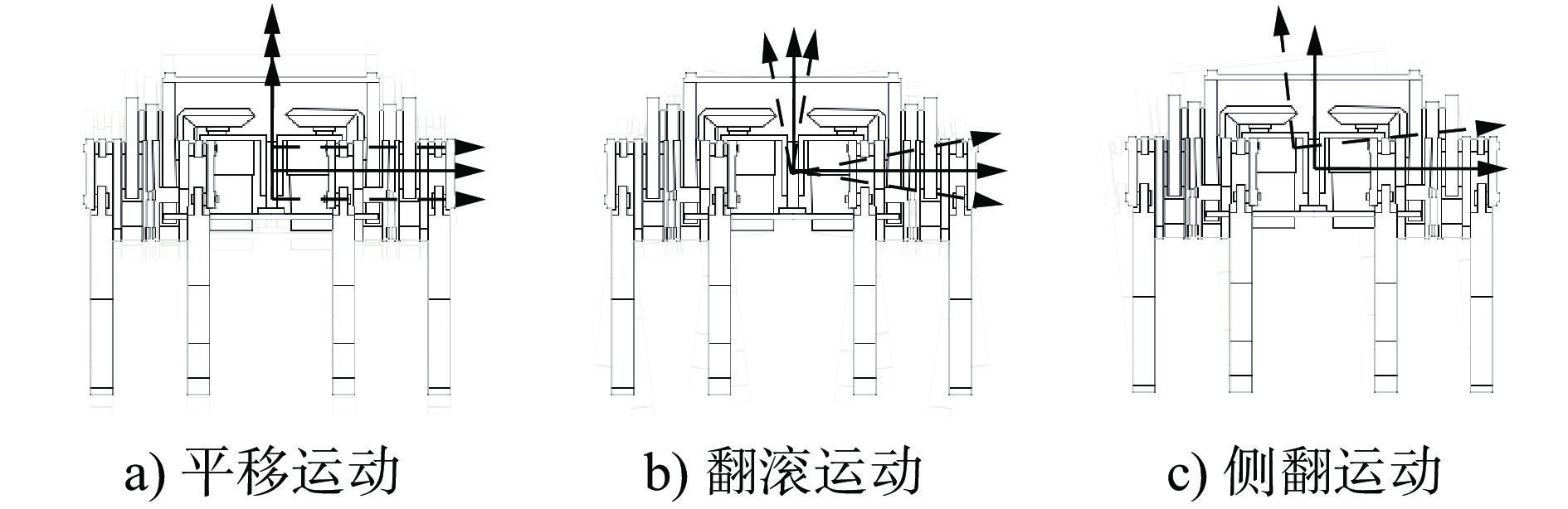
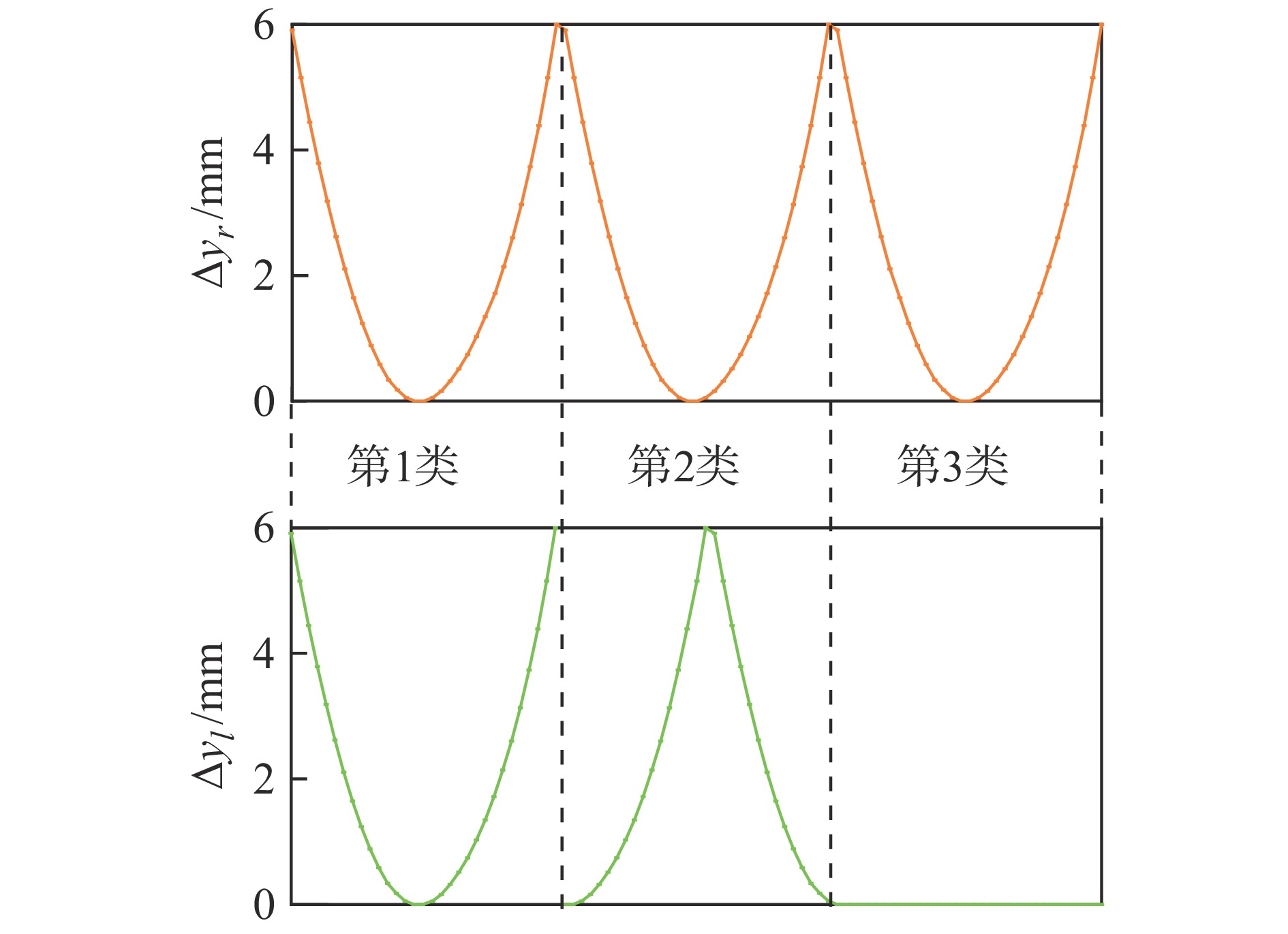
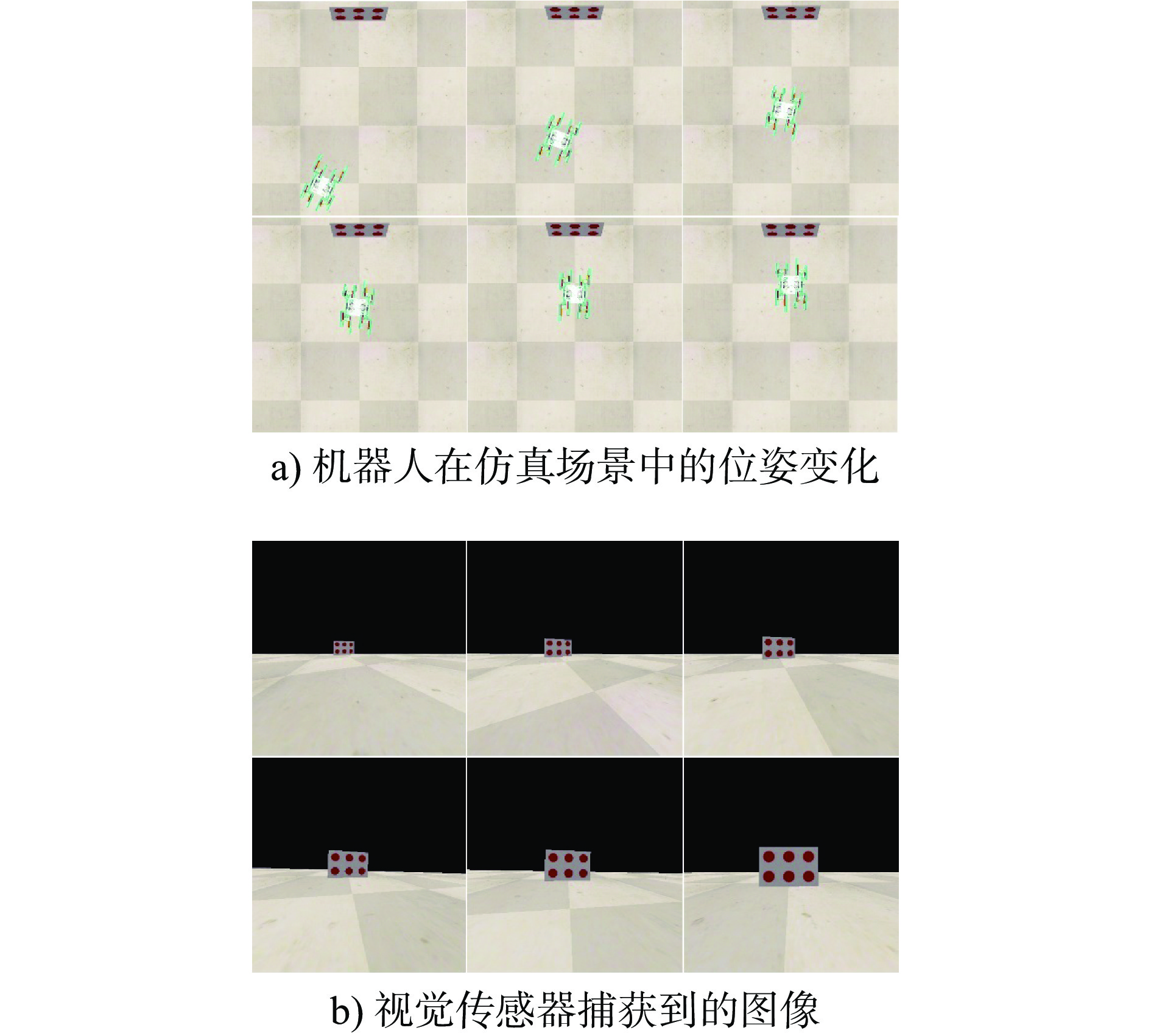
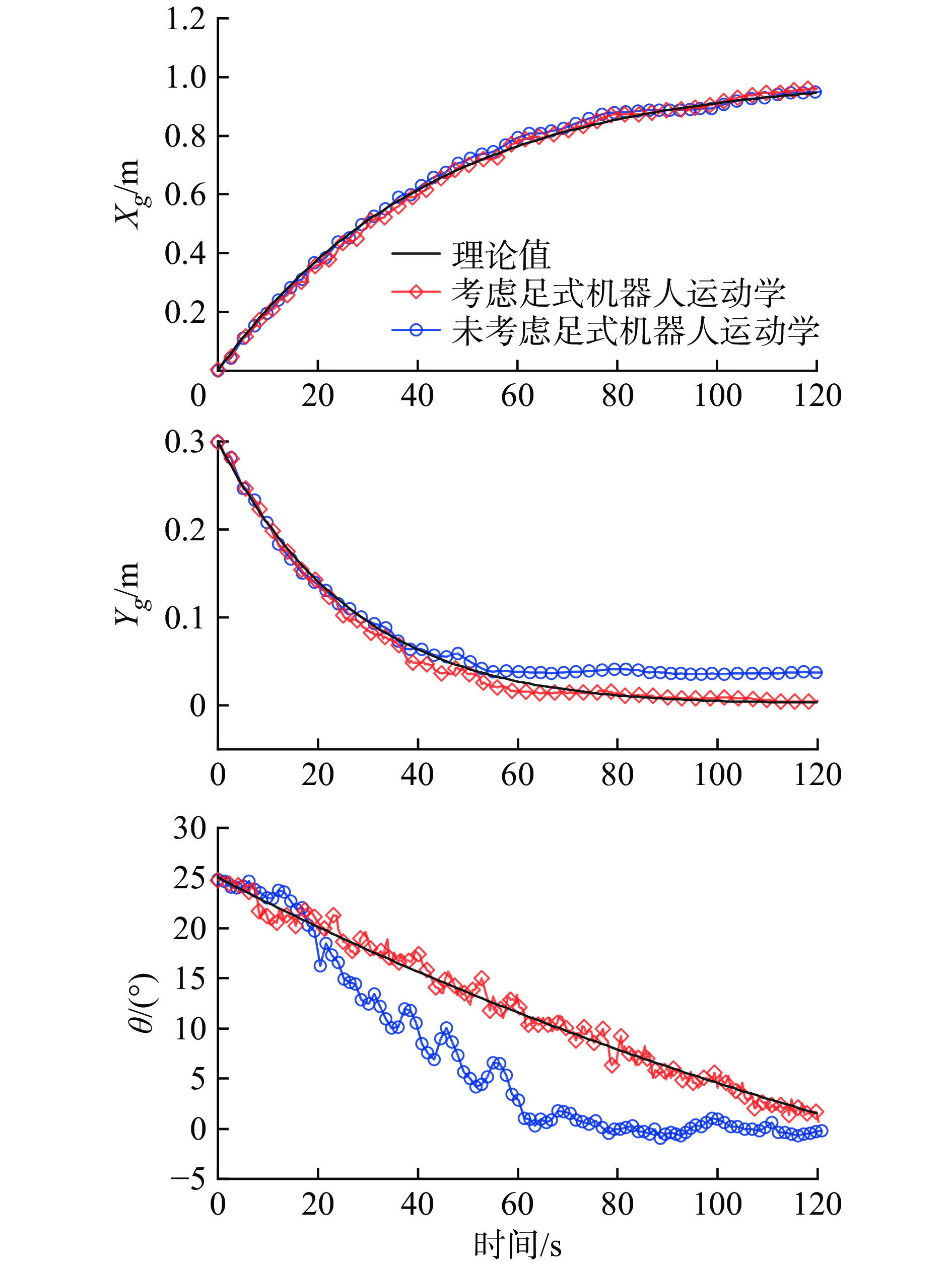
针对一种配有单目相机的足式移动机器人,提出一种基于图像单应性的混合视觉伺服方法,利用单应性矩阵中的元素构造状态变量估计估计机器人相对位姿,使机器人在缺乏深度信息的情况下可准确到达目标位姿。相较于轮式移动机器人,在足式机器人移动过程中,足式机构的间歇性运动直接影响机器人视觉反馈过程和伺服控制系统的准确性和稳定性。为解决这一问题,通过分析足式机构运动学并建立足式机器人移动速度与电机转速的映射关系,使控制器可以更准确地调整机器人运动速度。考虑到足式机构运动对视觉反馈环节的影响,提出一种改进型自适应中值滤波算法提高位姿估计精度。伺服环节设计了滑模控制器,并采用李雅普诺夫方法证明了控制系统的稳定性。最后,利用CoppeliaSim软件搭建足式移动机器人虚拟模型,通过仿真验证了所提出控制方案的可行性与有效性。
针对一种配有单目相机的足式移动机器人,提出一种基于图像单应性的混合视觉伺服方法,利用单应性矩阵中的元素构造状态变量估计估计机器人相对位姿,使机器人在缺乏深度信息的情况下可准确到达目标位姿。相较于轮式移动机器人,在足式机器人移动过程中,足式机构的间歇性运动直接影响机器人视觉反馈过程和伺服控制系统的准确性和稳定性。为解决这一问题,通过分析足式机构运动学并建立足式机器人移动速度与电机转速的映射关系,使控制器可以更准确地调整机器人运动速度。考虑到足式机构运动对视觉反馈环节的影响,提出一种改进型自适应中值滤波算法提高位姿估计精度。伺服环节设计了滑模控制器,并采用李雅普诺夫方法证明了控制系统的稳定性。最后,利用CoppeliaSim软件搭建足式移动机器人虚拟模型,通过仿真验证了所提出控制方案的可行性与有效性。








2022, 41(12): 1815-1821.
doi: 10.13433/j.cnki.1003-8728.20200542
摘要:
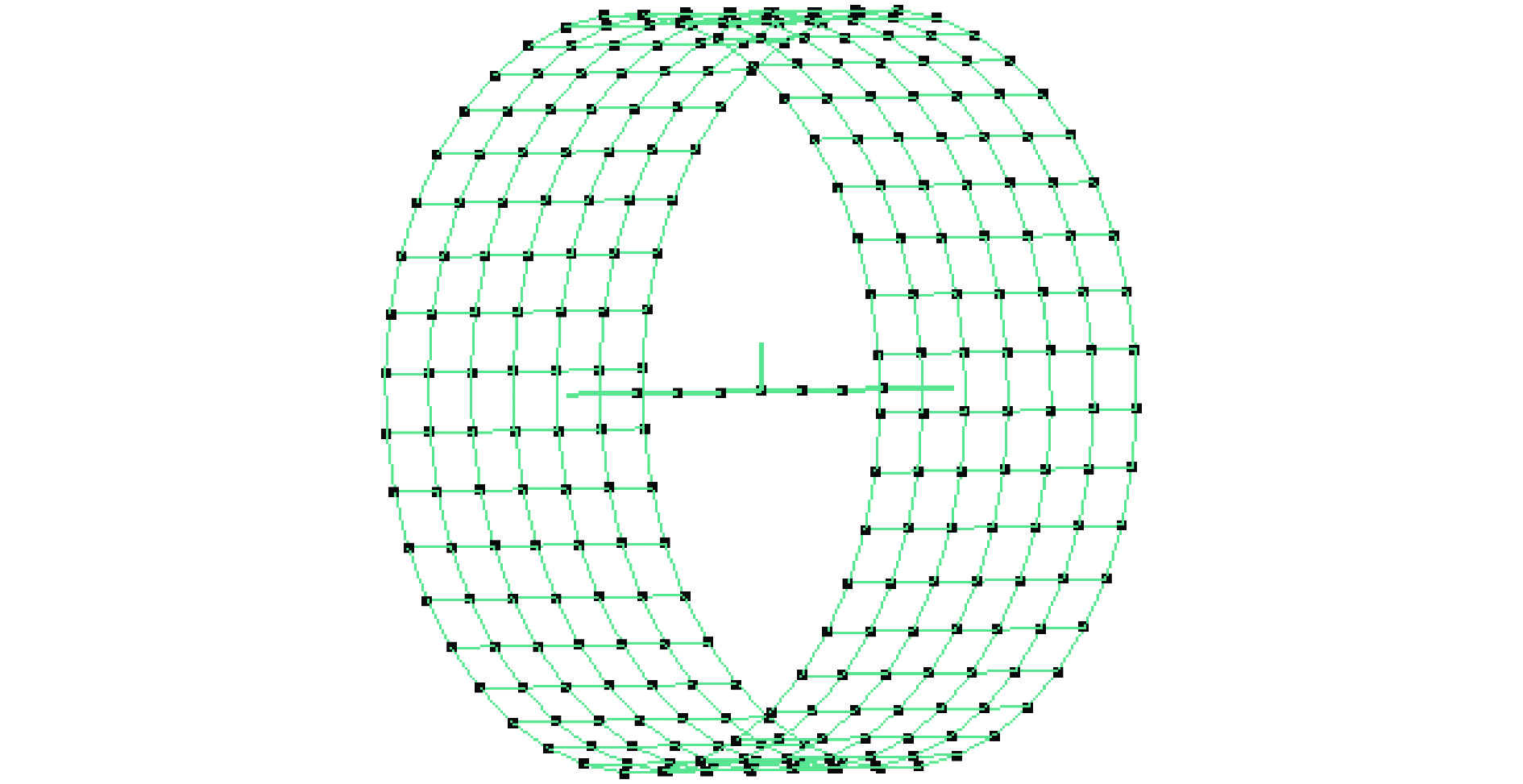
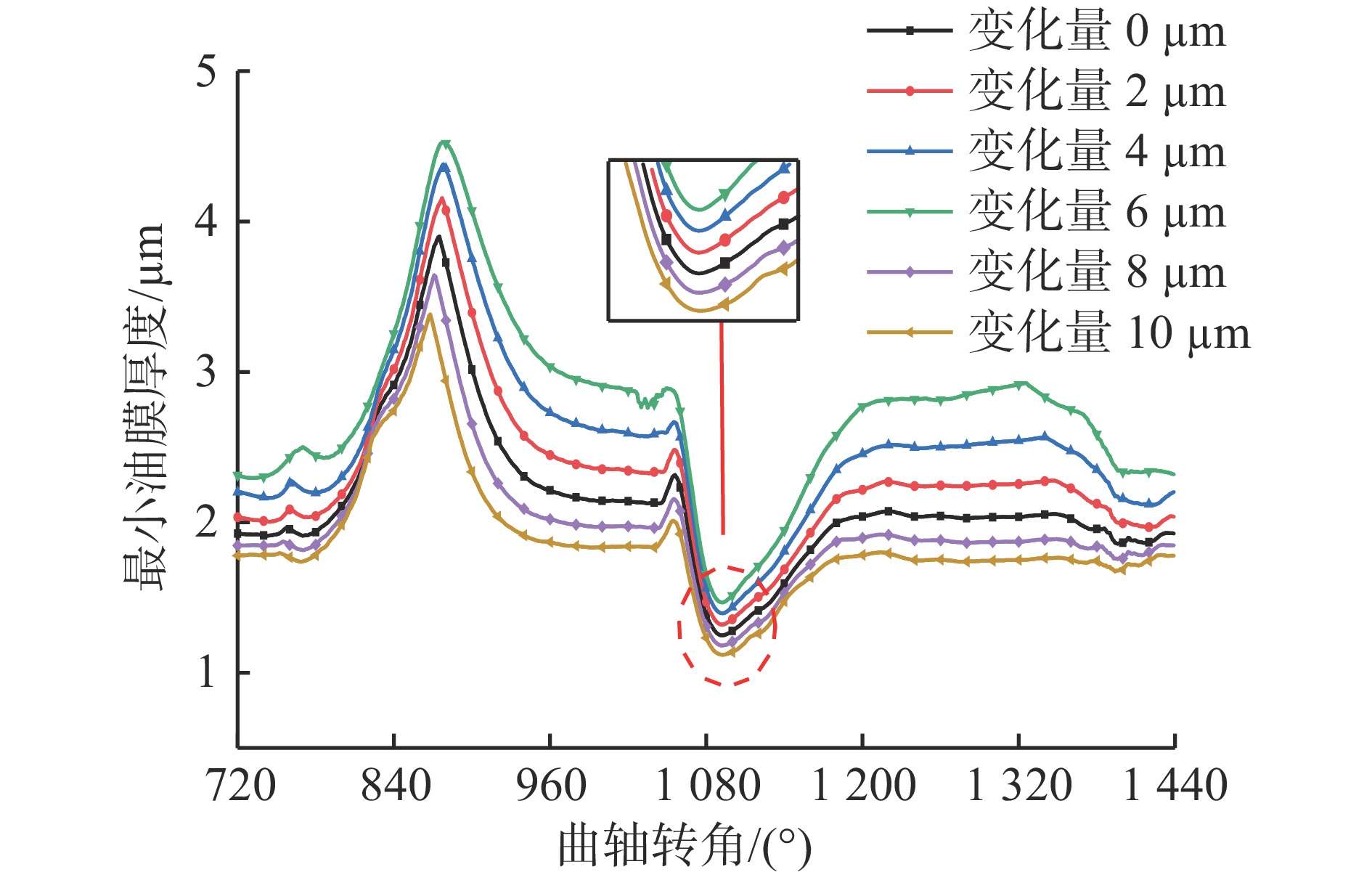
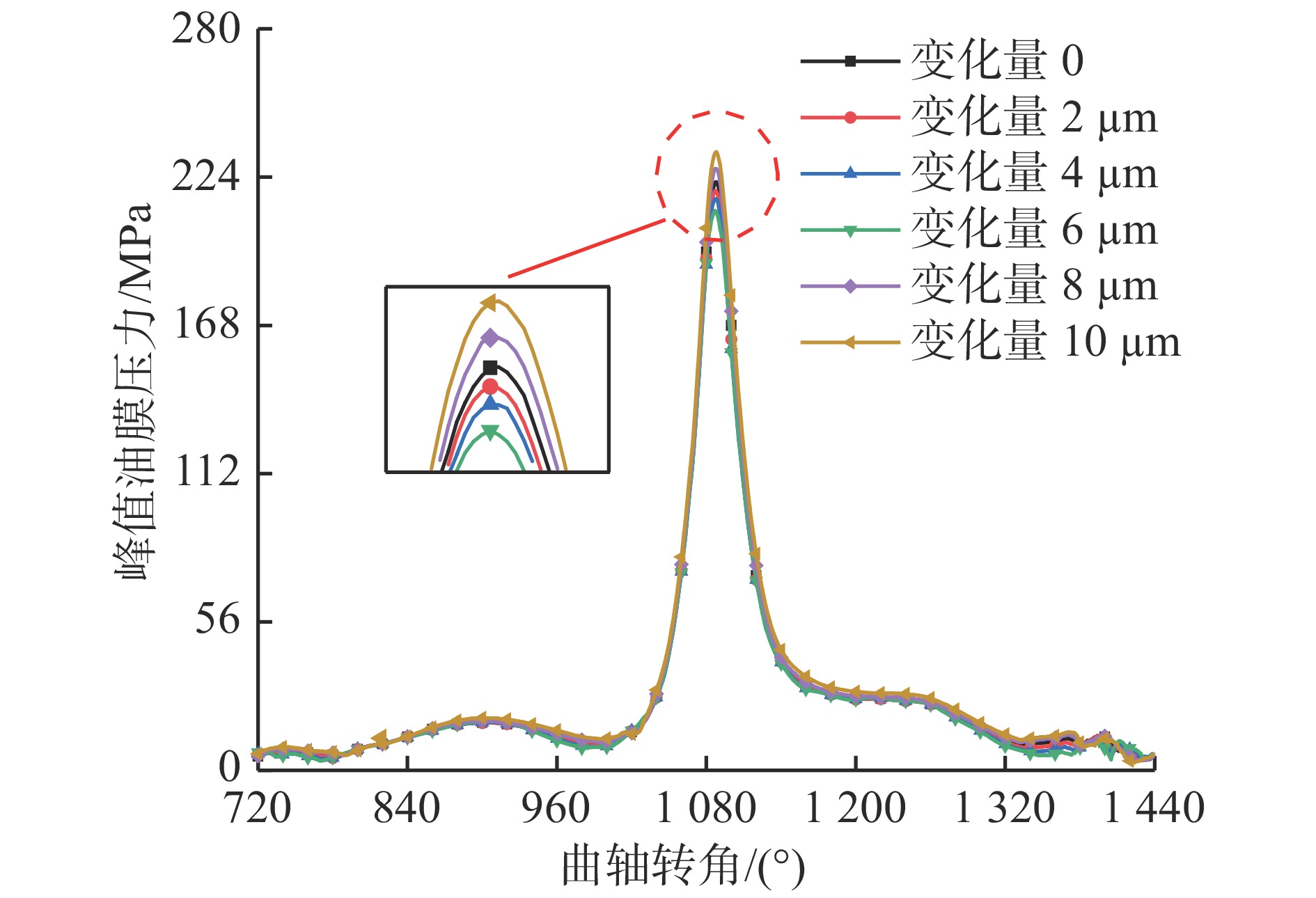
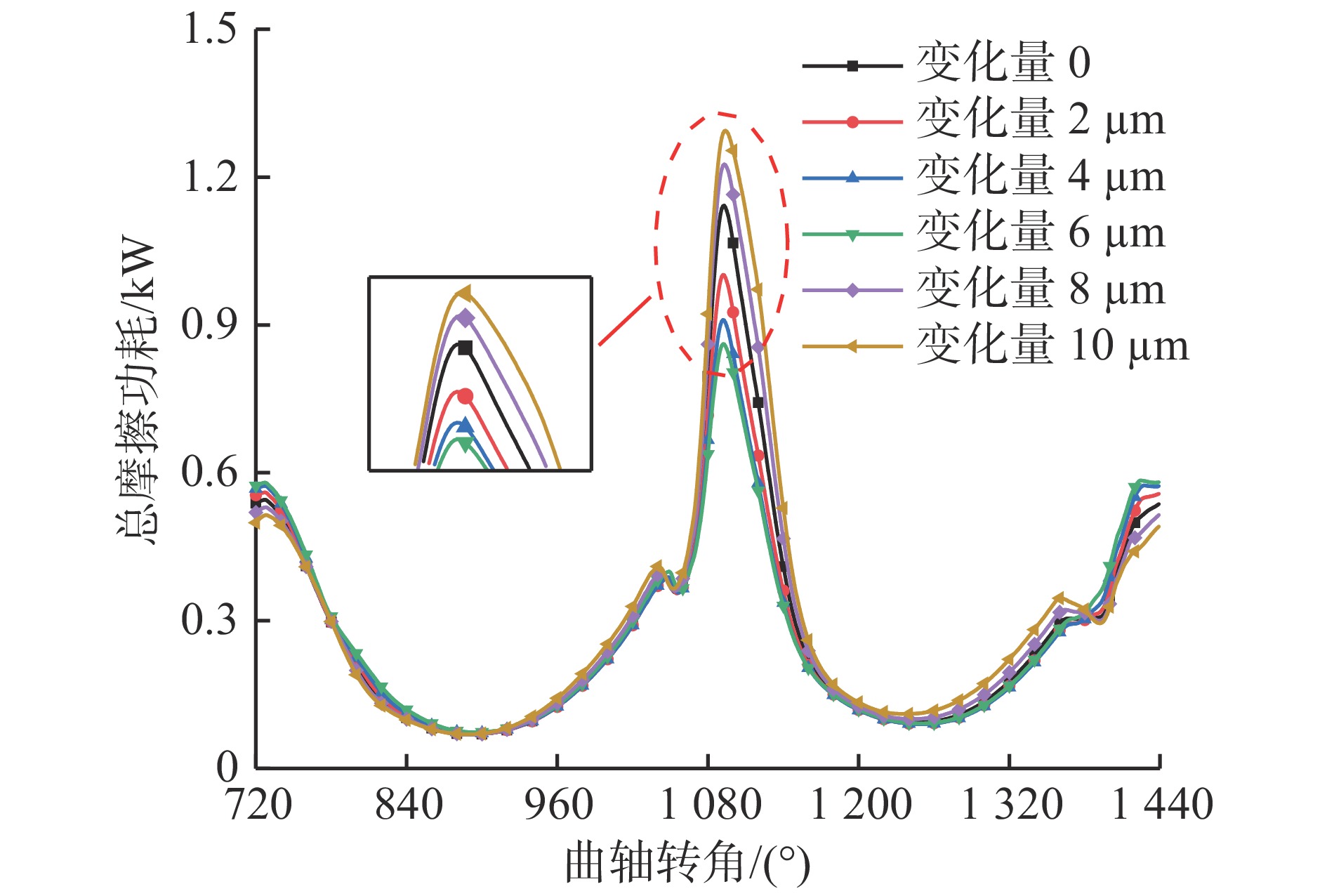
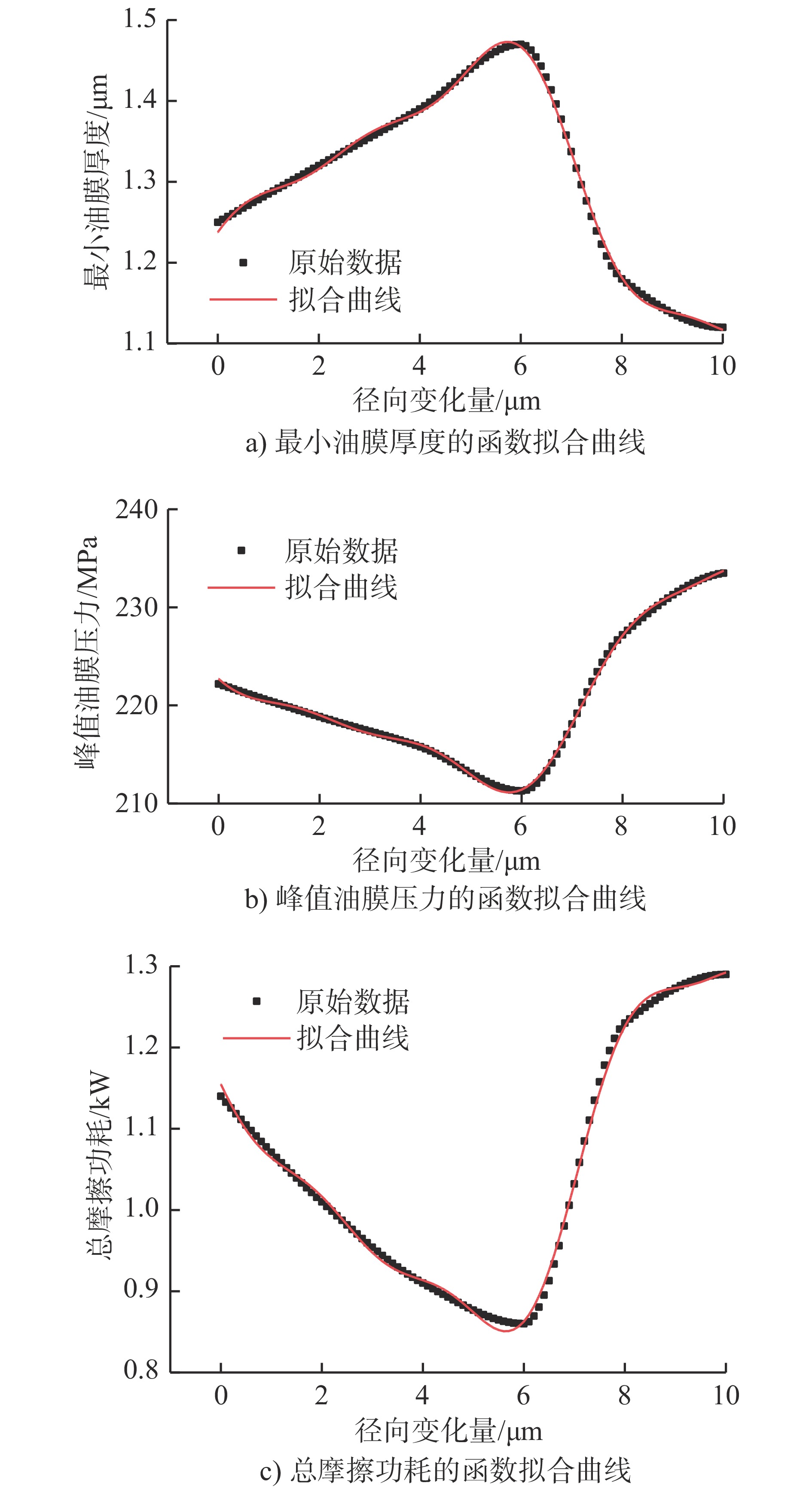
针对柴油机连杆大头轴承润滑不良和摩擦磨损的问题,结合轴承型线的设计理论,建立了悬链型线的数学表达式。运用AVL POWER UNIT搭建连杆柔性多体动力学模型,研究了连杆大头轴承的悬链线型线对其润滑特性的影响。结果表明:当连杆大头轴承采用悬链线型线轴瓦时,随着型线径向变化量的逐步增加,峰值油膜压力先减小后增大,最小油膜厚度先增大后减小,总摩擦功耗先减小后增大。当采用径向变化量为方案4(变化量6 μm)的悬链线型线轴瓦时,最小油膜厚度增加了0.22 μm,峰值油膜压力减少了10.92 MPa,总摩擦功耗减少了0.28 kW,有利于减小轴承的摩擦磨损功耗和改善连杆大头轴承的总体润滑性能。通过曲线拟合分析得到了最小油膜厚度、峰值油膜压力和总摩擦功耗这3个评价参数的函数关系,为连杆大头轴承润滑特性的优化设计提供参考依据。
针对柴油机连杆大头轴承润滑不良和摩擦磨损的问题,结合轴承型线的设计理论,建立了悬链型线的数学表达式。运用AVL POWER UNIT搭建连杆柔性多体动力学模型,研究了连杆大头轴承的悬链线型线对其润滑特性的影响。结果表明:当连杆大头轴承采用悬链线型线轴瓦时,随着型线径向变化量的逐步增加,峰值油膜压力先减小后增大,最小油膜厚度先增大后减小,总摩擦功耗先减小后增大。当采用径向变化量为方案4(变化量6 μm)的悬链线型线轴瓦时,最小油膜厚度增加了0.22 μm,峰值油膜压力减少了10.92 MPa,总摩擦功耗减少了0.28 kW,有利于减小轴承的摩擦磨损功耗和改善连杆大头轴承的总体润滑性能。通过曲线拟合分析得到了最小油膜厚度、峰值油膜压力和总摩擦功耗这3个评价参数的函数关系,为连杆大头轴承润滑特性的优化设计提供参考依据。



2022, 41(12): 1822-1828.
doi: 10.13433/j.cnki.1003-8728.20200526
摘要:
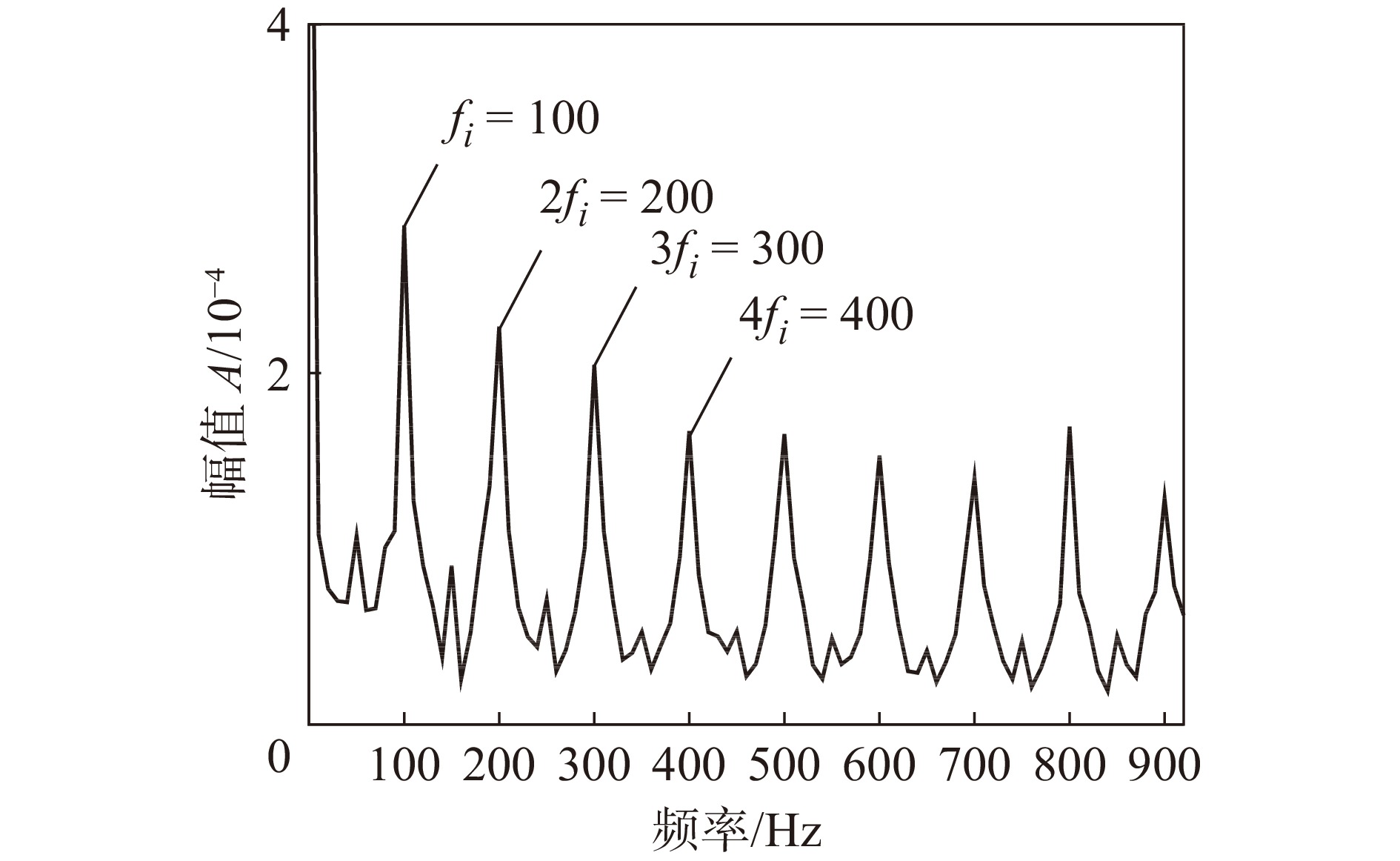
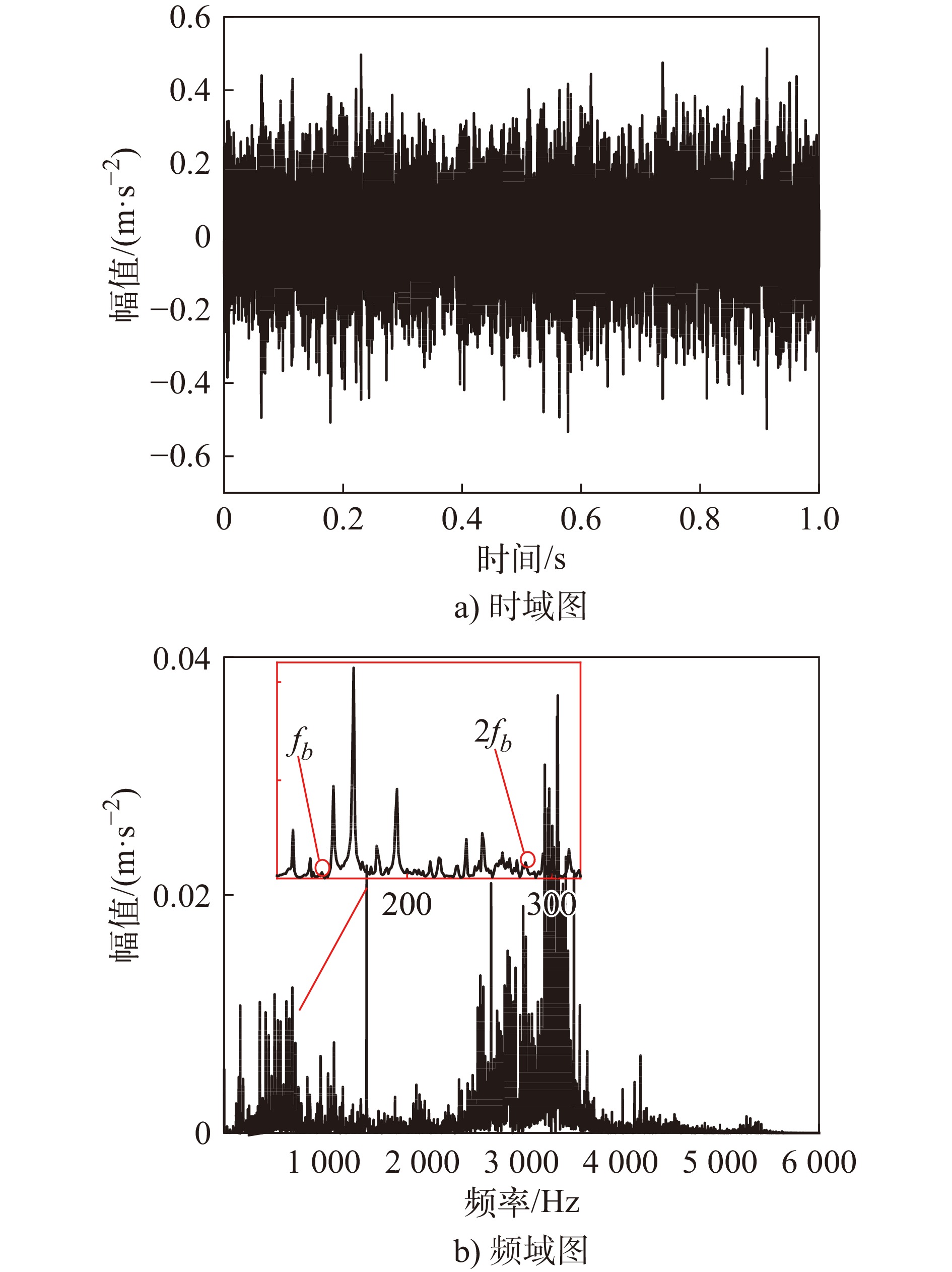
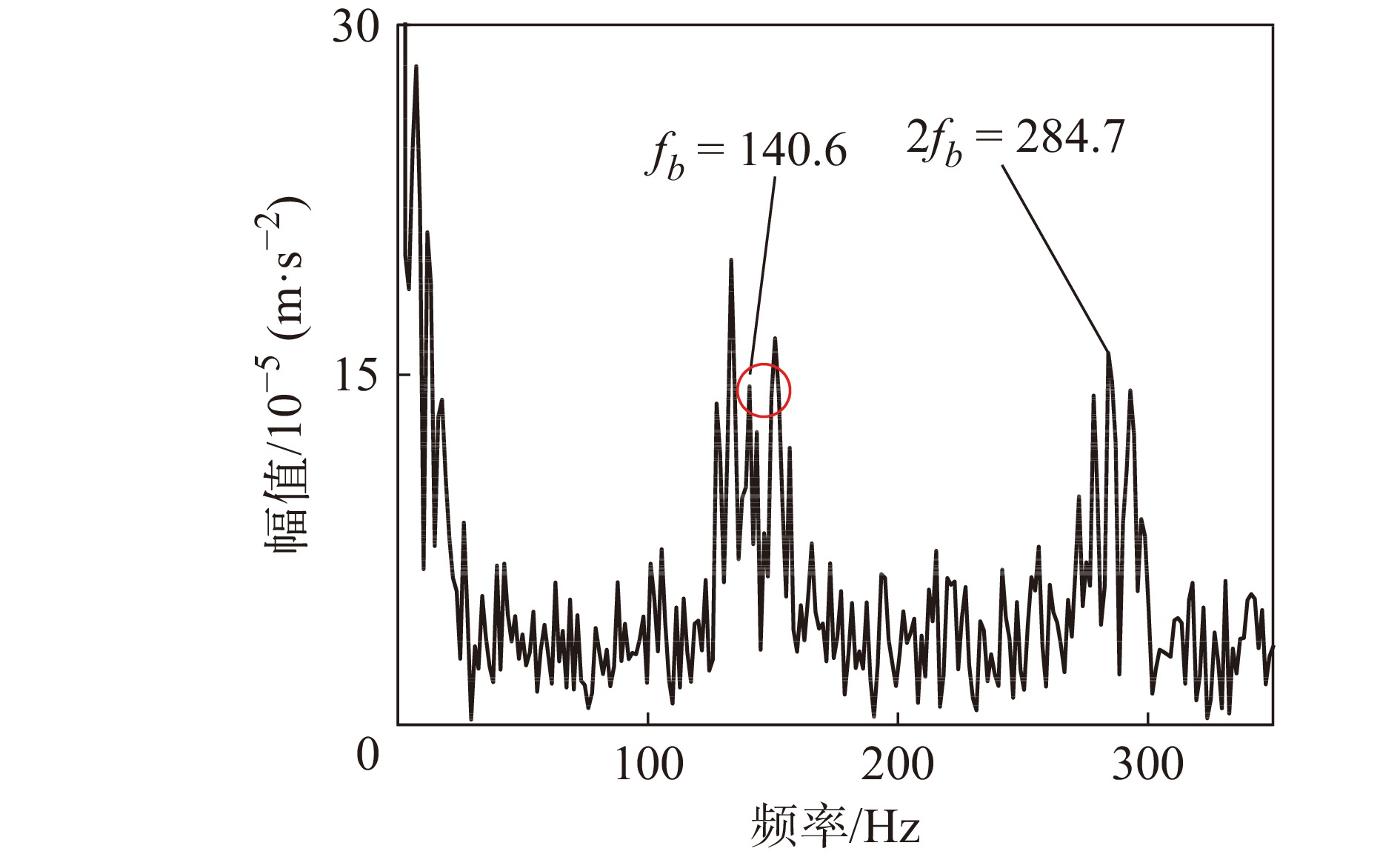
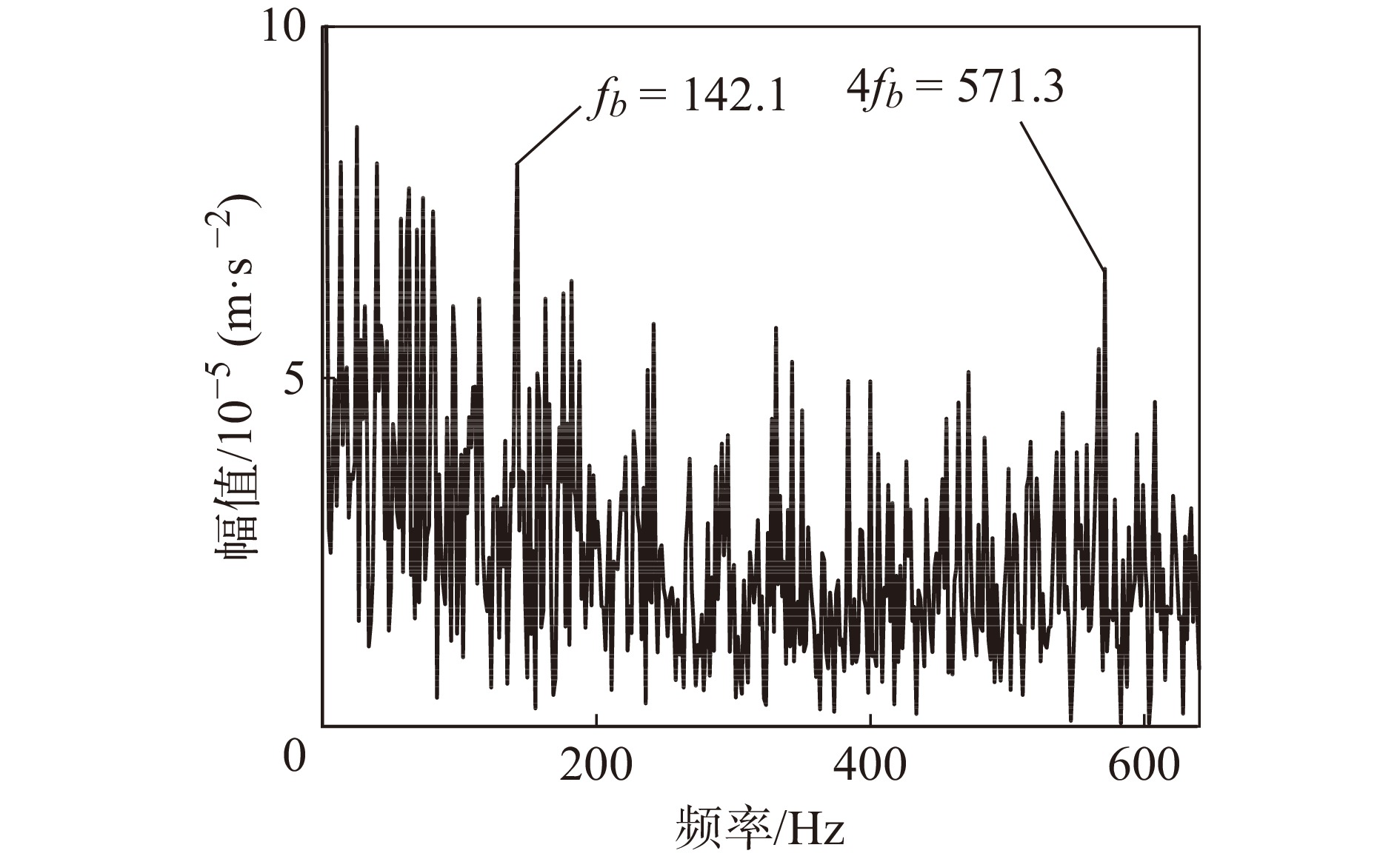
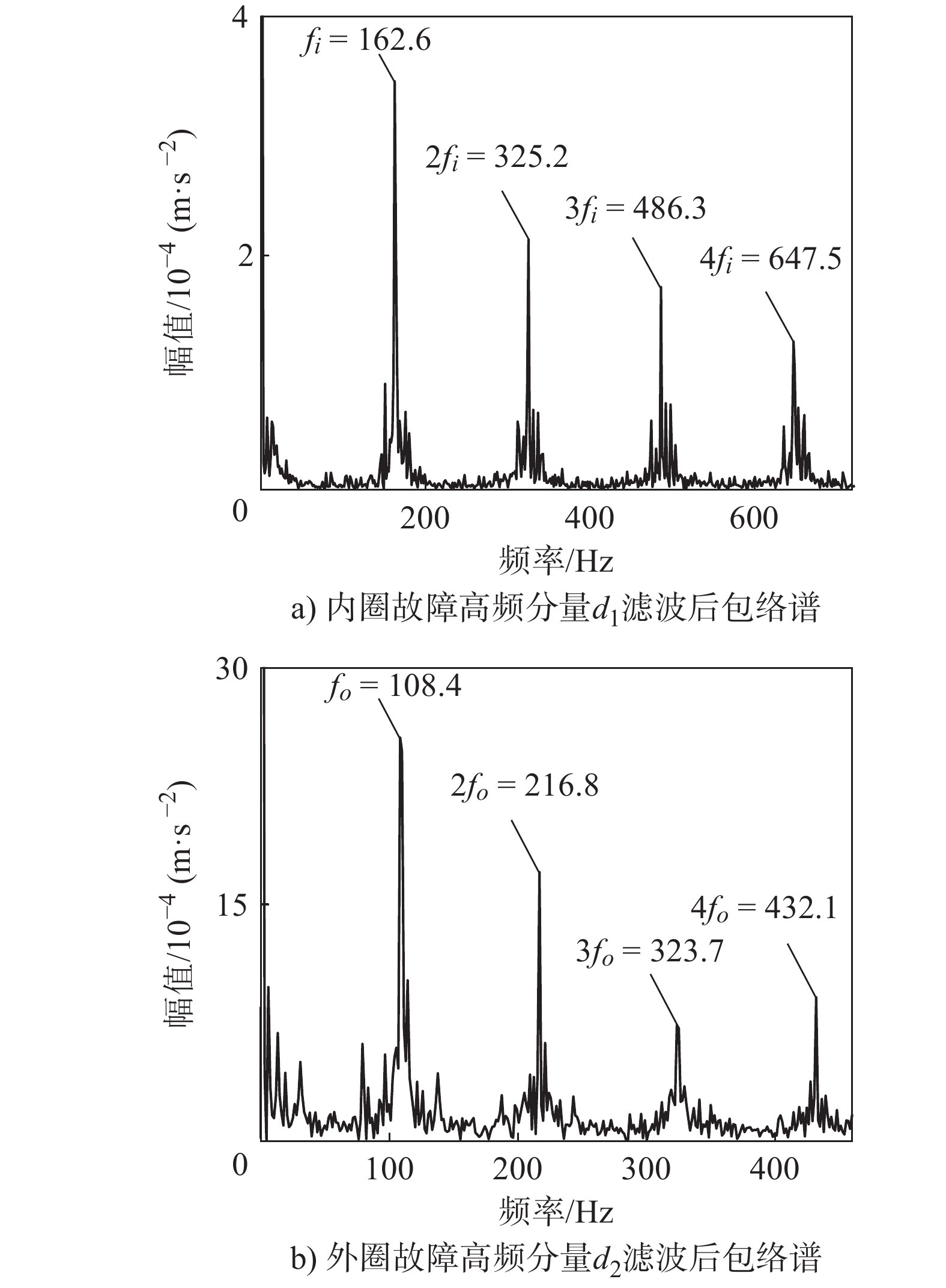
针对强噪声干扰下,最大相关峭度解卷积(Maximum correlation kurtosis deconvolution,MCKD)对于弱响应轴承滚动体故障信号指定周期冲击增强和辨识能力有限,无法自适应确定参数的问题,提出一种改进MCKD故障诊断方法。首先利用小波多尺度分解得到故障响应高频分量使冲击成份更加凸显;然后以峭度值最大准则复选出最优故障信号高频分量,降低噪音的干扰;最后结合小波方差自适应确定MCKD参数。轴承故障仿真、实验数据分析结果表明,该方法能够实现弱响应的轴承滚动体故障诊断,同时适用轴承内外圈故障诊断。
针对强噪声干扰下,最大相关峭度解卷积(Maximum correlation kurtosis deconvolution,MCKD)对于弱响应轴承滚动体故障信号指定周期冲击增强和辨识能力有限,无法自适应确定参数的问题,提出一种改进MCKD故障诊断方法。首先利用小波多尺度分解得到故障响应高频分量使冲击成份更加凸显;然后以峭度值最大准则复选出最优故障信号高频分量,降低噪音的干扰;最后结合小波方差自适应确定MCKD参数。轴承故障仿真、实验数据分析结果表明,该方法能够实现弱响应的轴承滚动体故障诊断,同时适用轴承内外圈故障诊断。





2022, 41(12): 1829-1838.
doi: 10.13433/j.cnki.1003-8728.20200521
摘要:
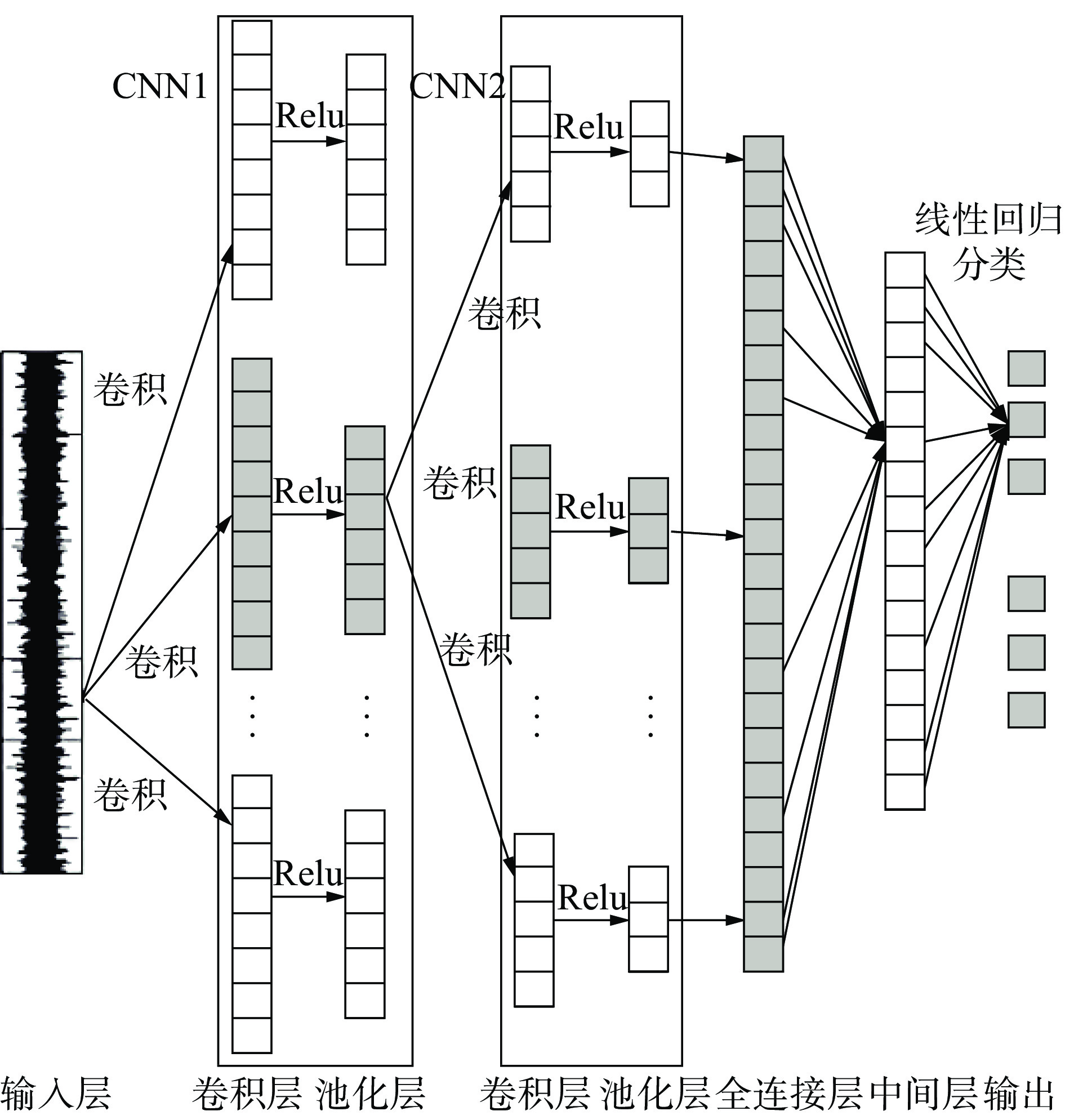
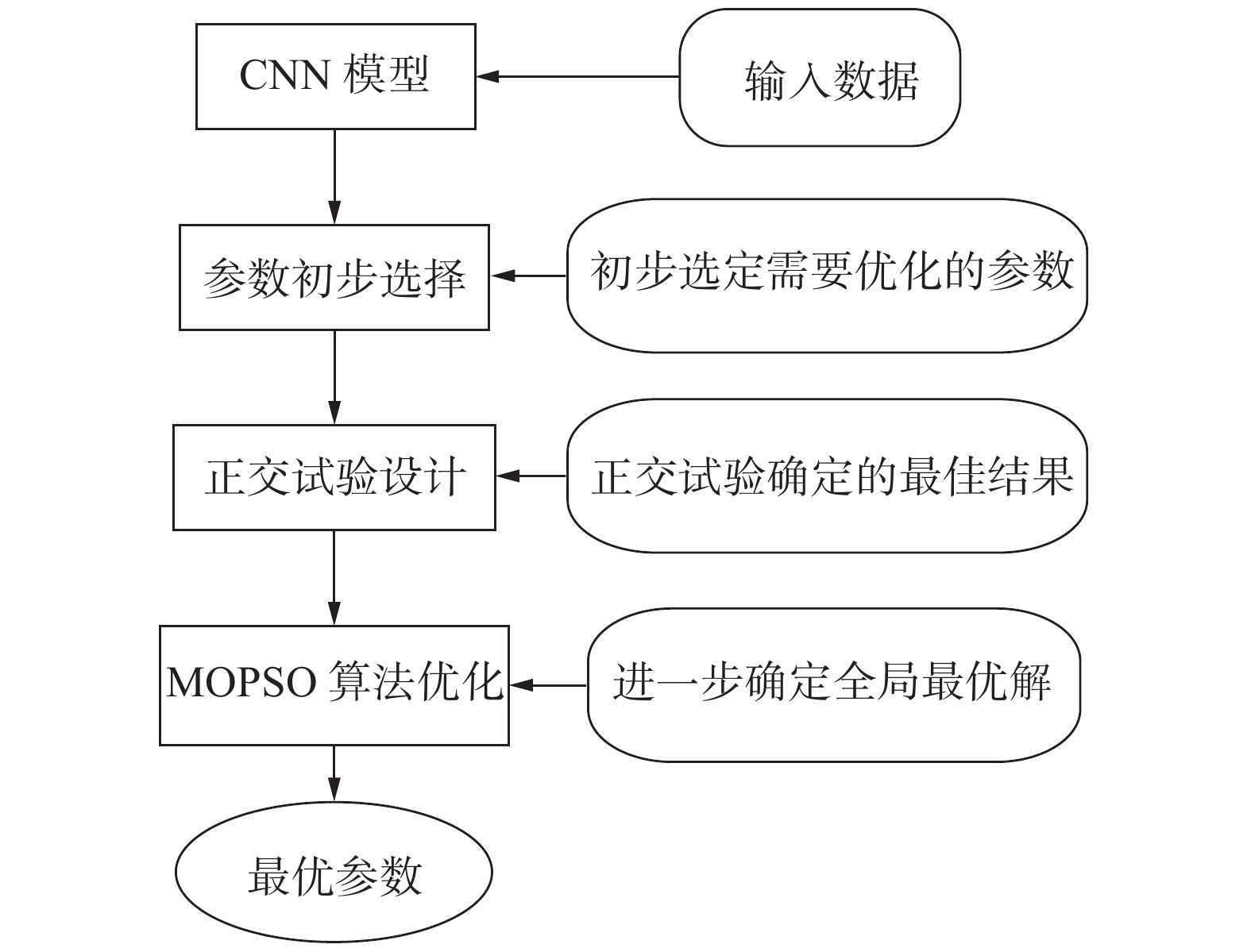
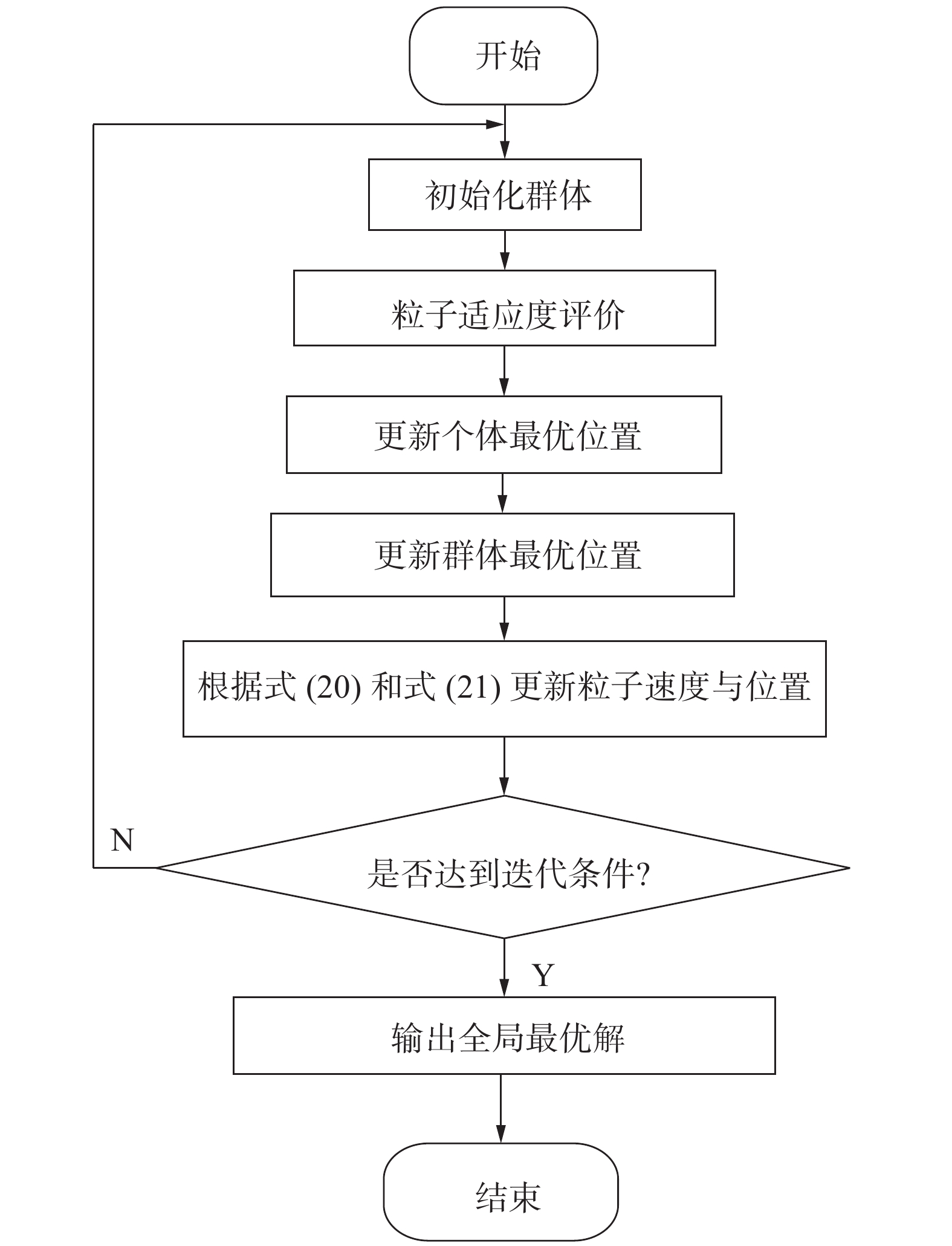
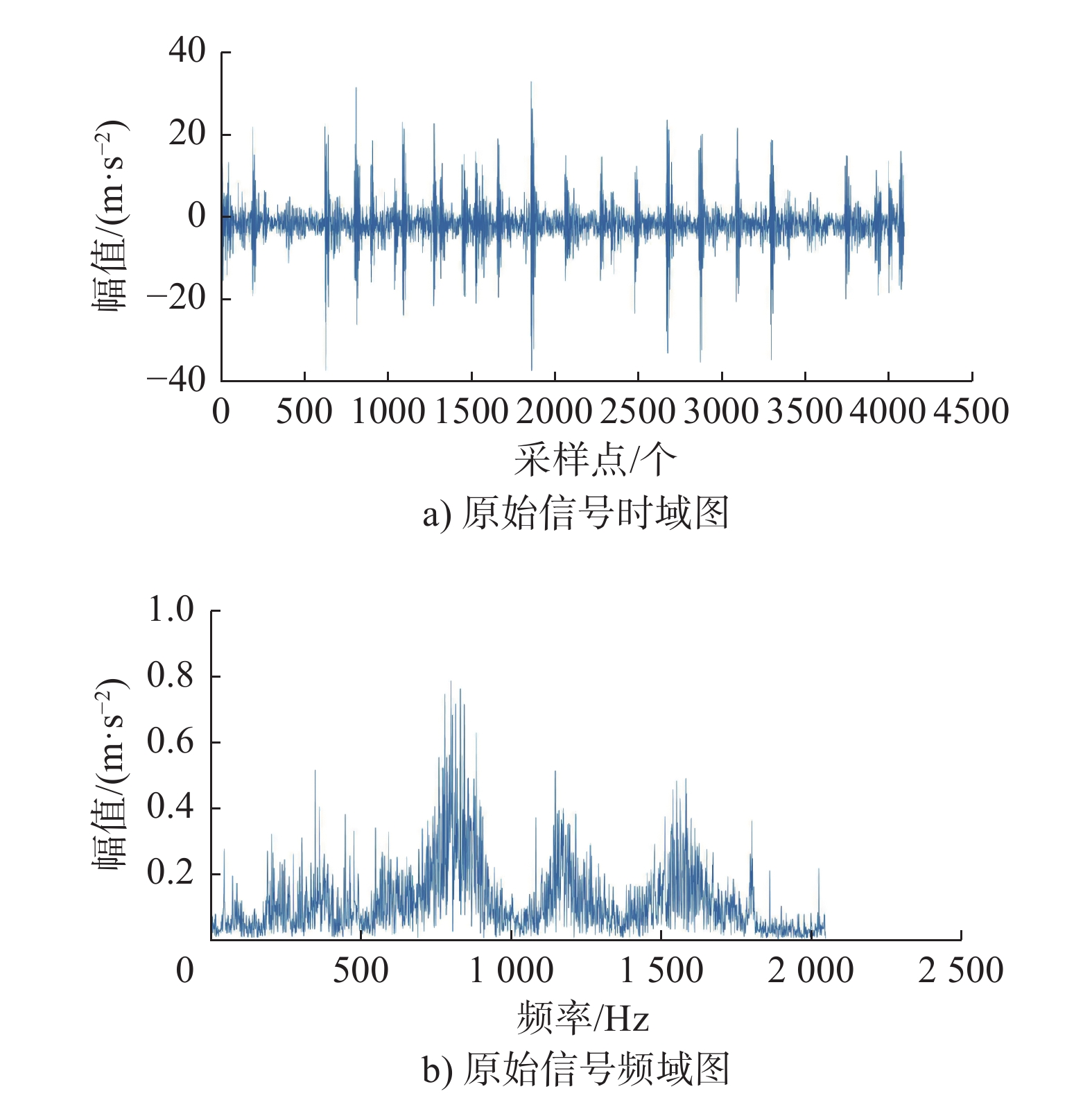
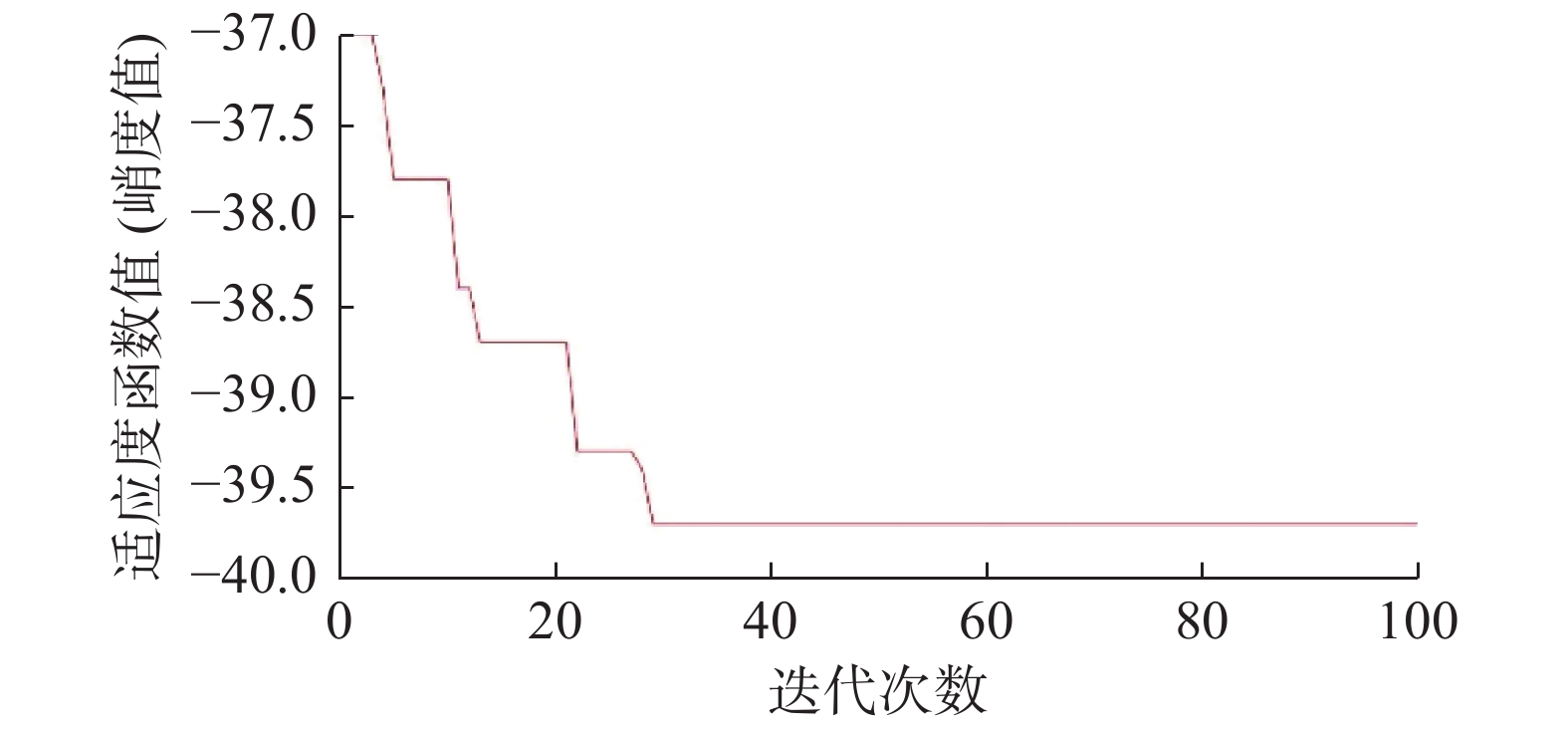
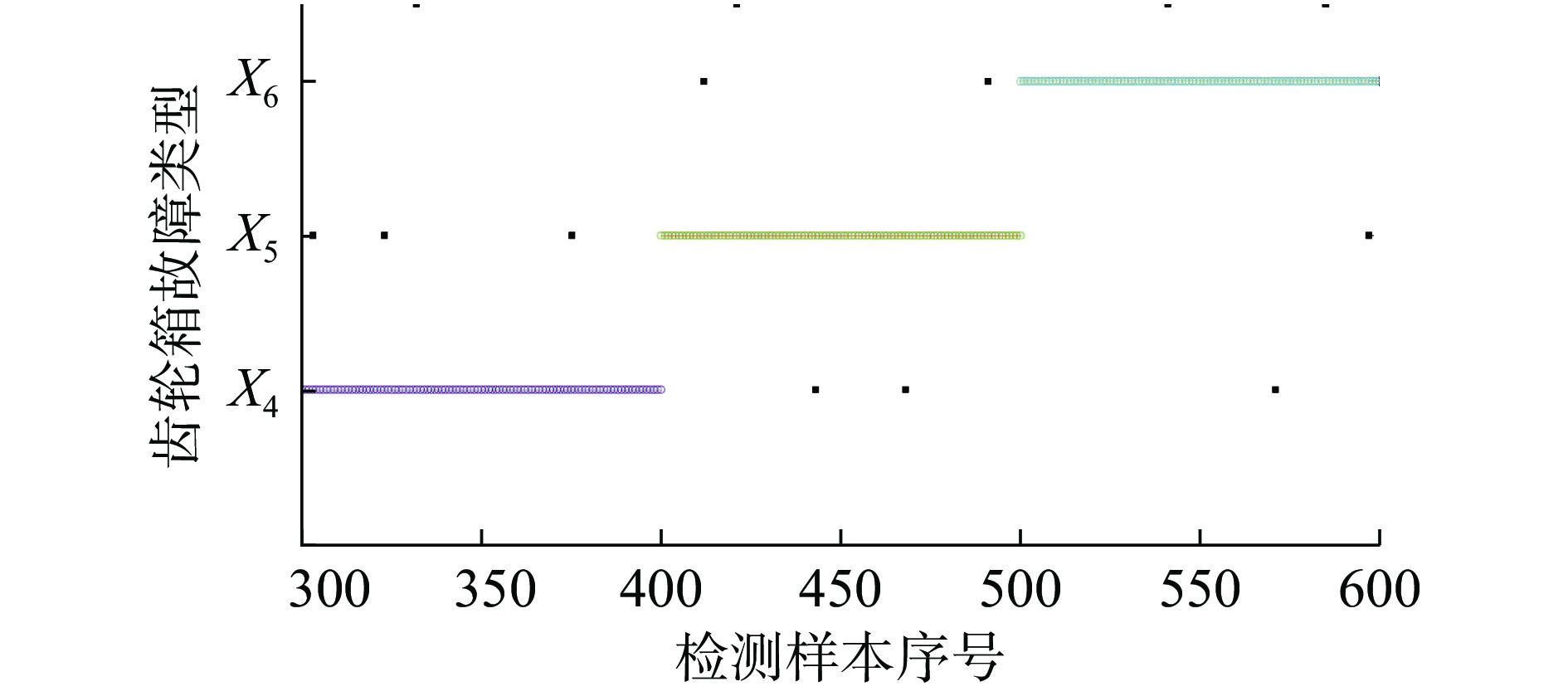
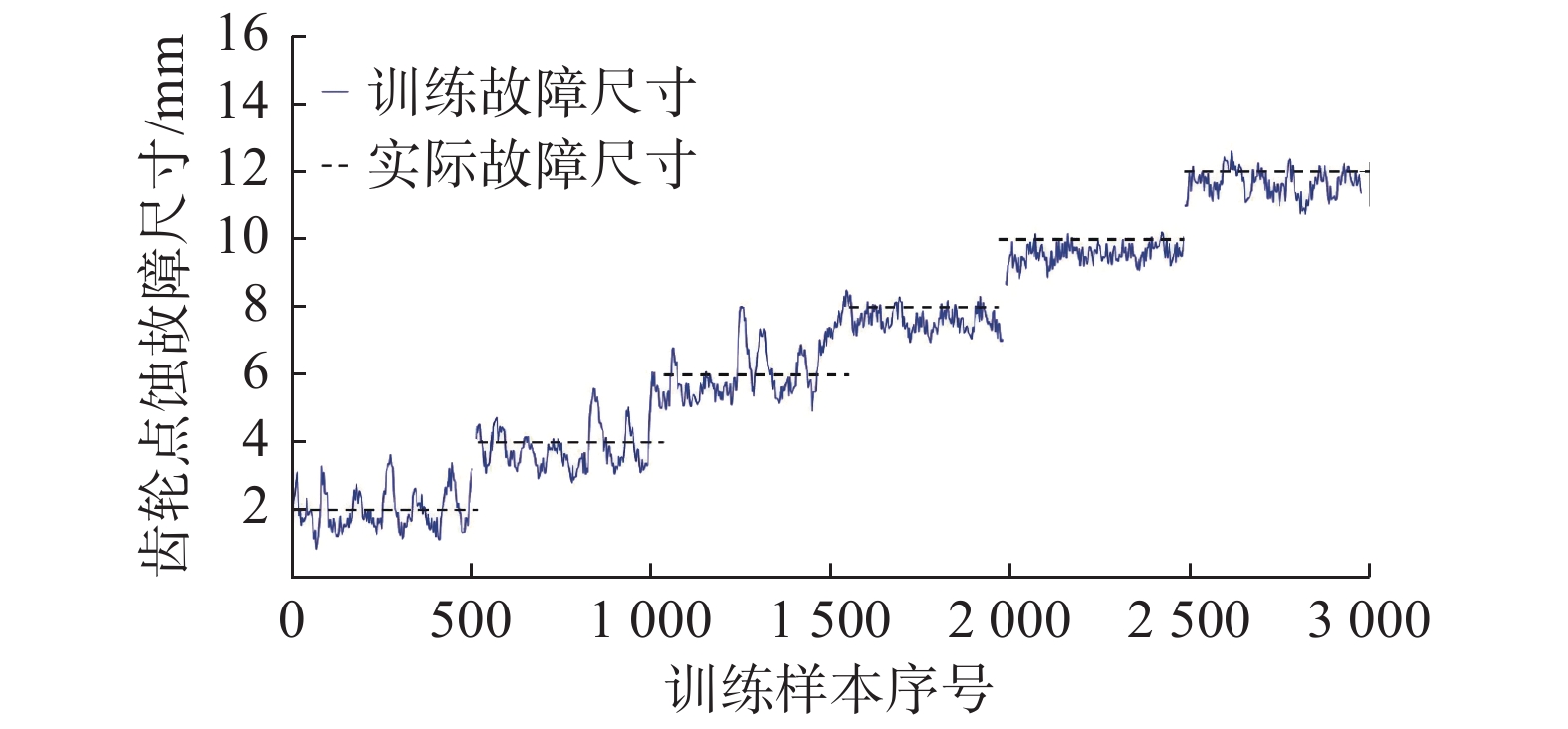
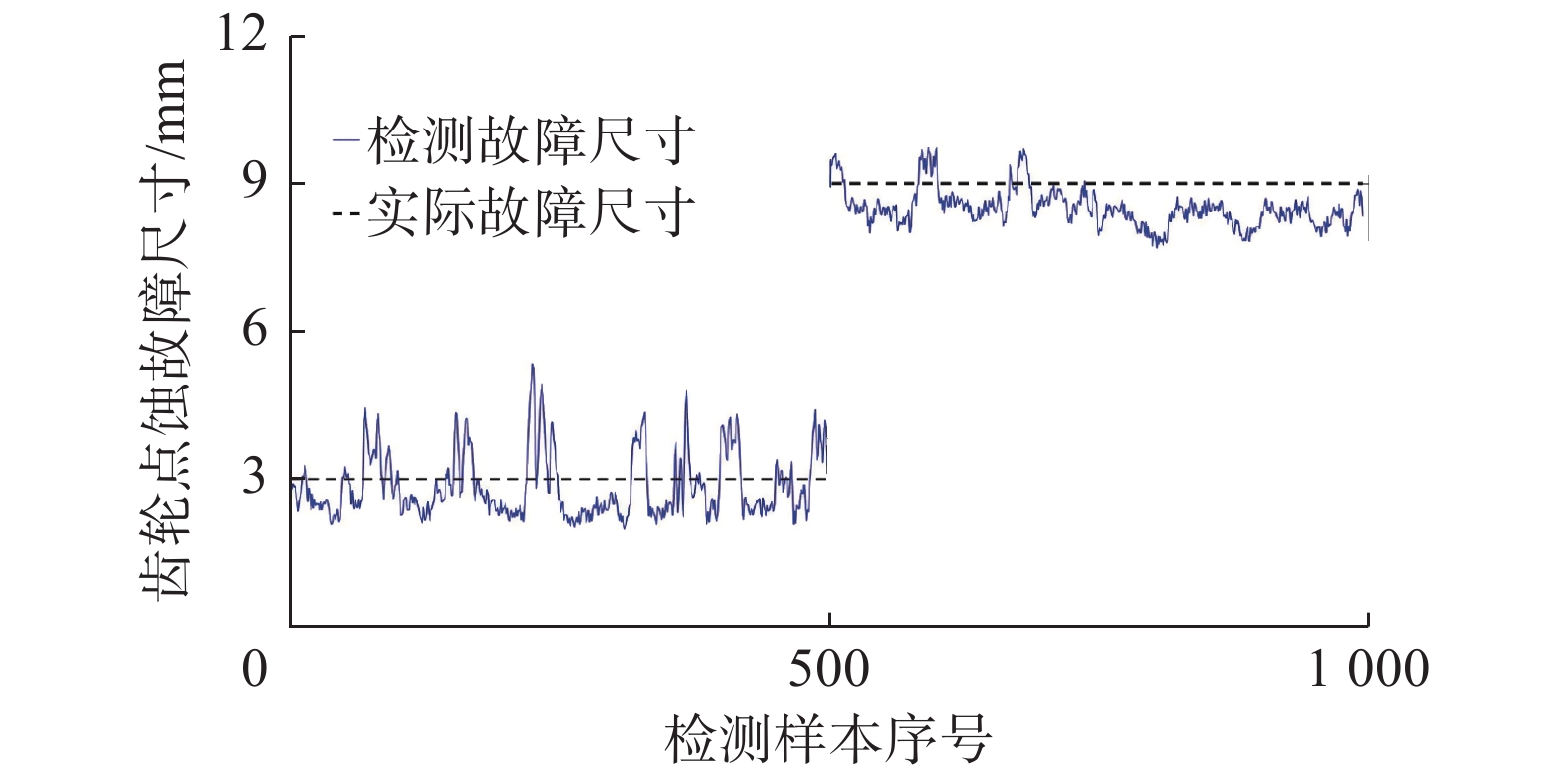
针对齿轮箱的故障诊断的优化问题,提出了一种基于参数优化的变分模态分解(VMD)与卷积神经网络(CNN)相融合的故障诊断方法。该算法首先通过鲸鱼优化算法对VMD算法进行优化,之后通过正交实验法与粒子群优化算法进行了CNN模型中的重要参数进行优化,最后将分解后得到的固有模态分量输入CNN模型中进行训练学习。诊断完成后得到训练与检测结果,其中经过算法优化后CNN模型的训练与检测准确率可达98.7%与95.7%,优于未优化的准确率94.3%与91.8%。通过对结果的分析验证出该算法的可行性以及在诊断成功率方面的优越性,实现了故障特征信息的自适应性提取,并将故障类型进行分类,最终实现齿轮箱故障诊断的智能化。
针对齿轮箱的故障诊断的优化问题,提出了一种基于参数优化的变分模态分解(VMD)与卷积神经网络(CNN)相融合的故障诊断方法。该算法首先通过鲸鱼优化算法对VMD算法进行优化,之后通过正交实验法与粒子群优化算法进行了CNN模型中的重要参数进行优化,最后将分解后得到的固有模态分量输入CNN模型中进行训练学习。诊断完成后得到训练与检测结果,其中经过算法优化后CNN模型的训练与检测准确率可达98.7%与95.7%,优于未优化的准确率94.3%与91.8%。通过对结果的分析验证出该算法的可行性以及在诊断成功率方面的优越性,实现了故障特征信息的自适应性提取,并将故障类型进行分类,最终实现齿轮箱故障诊断的智能化。









2022, 41(12): 1839-1843.
doi: 10.13433/j.cnki.1003-8728.20200518
摘要:
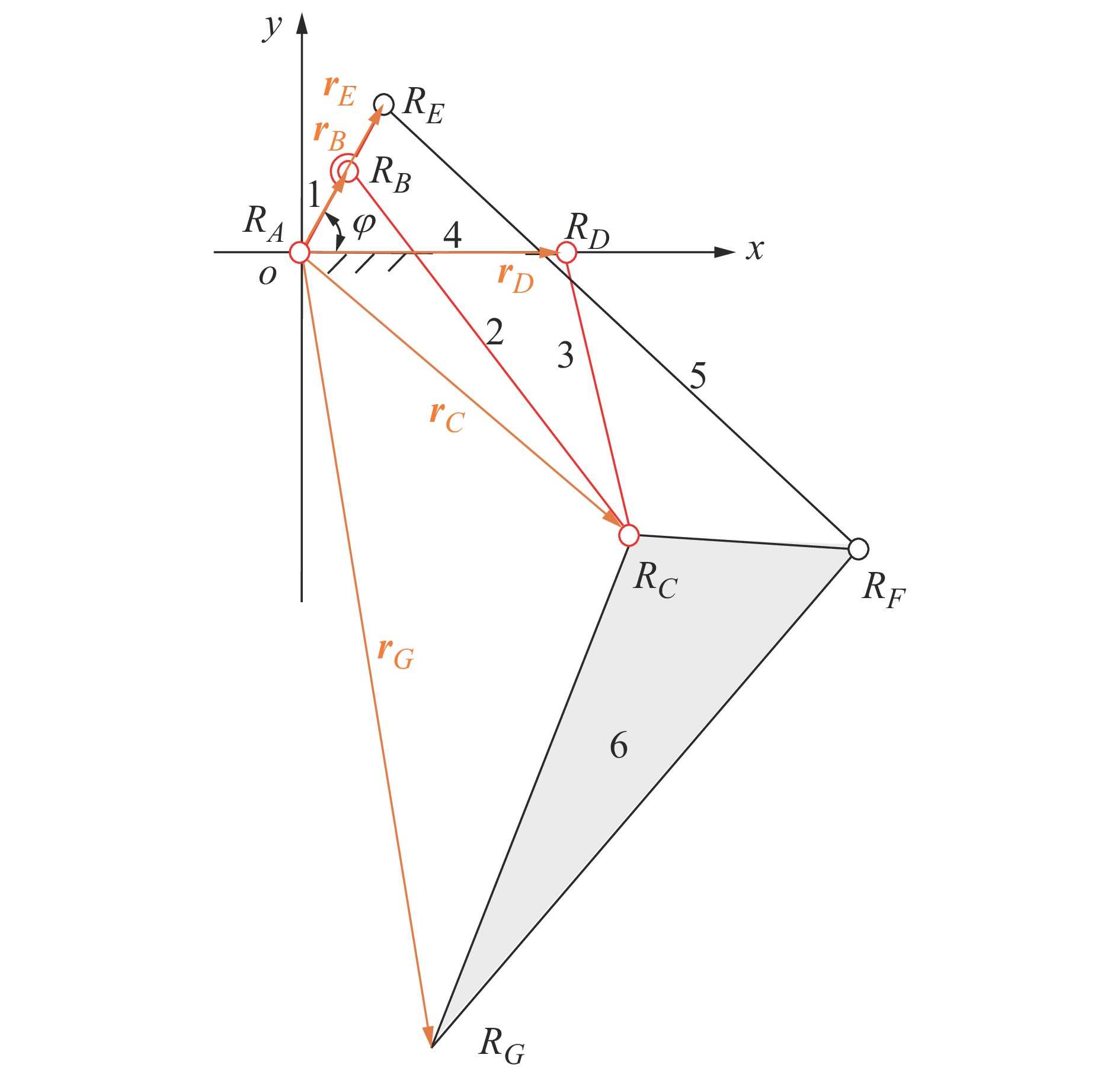
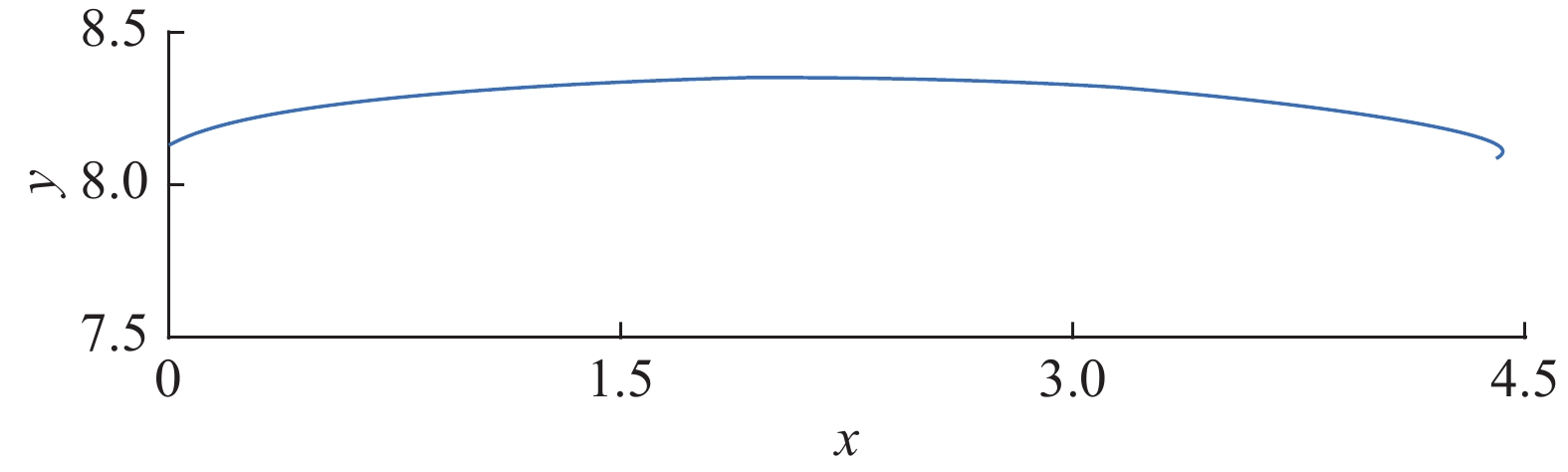
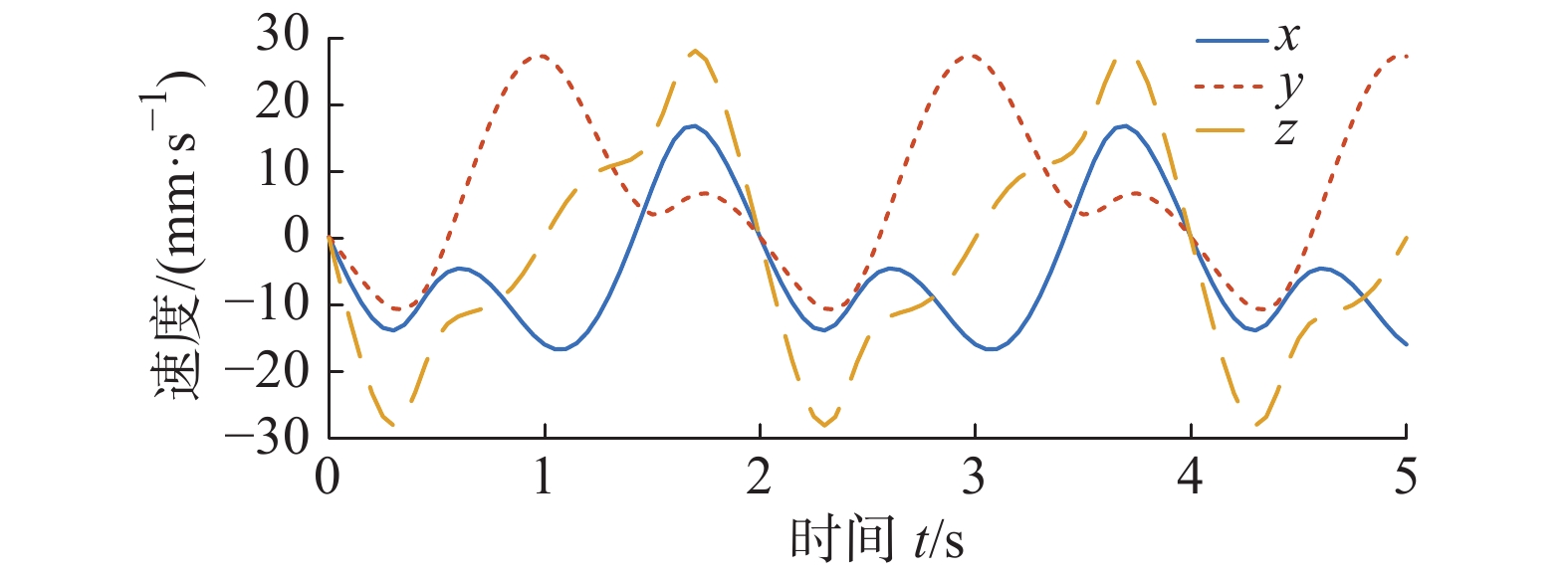
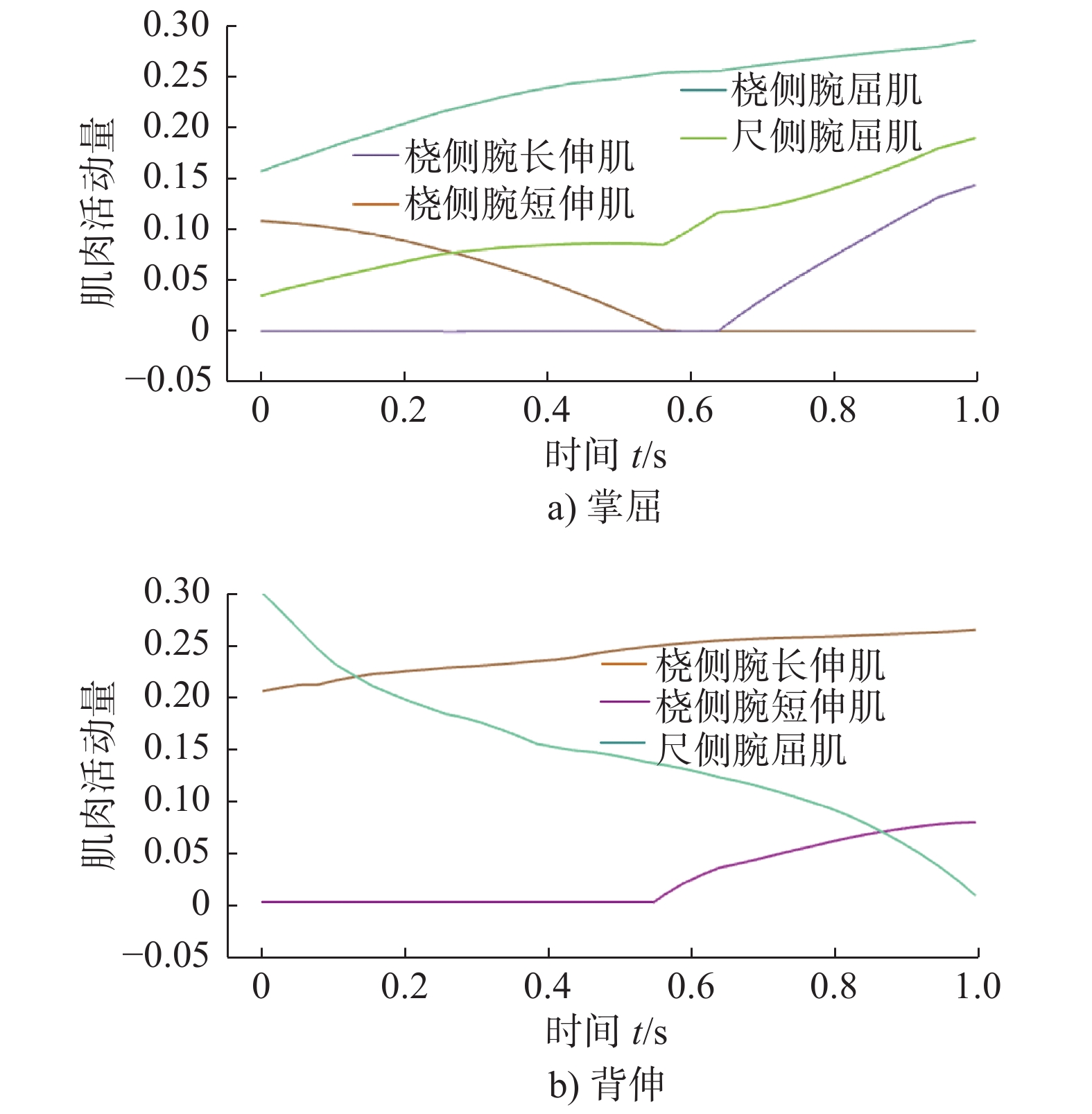
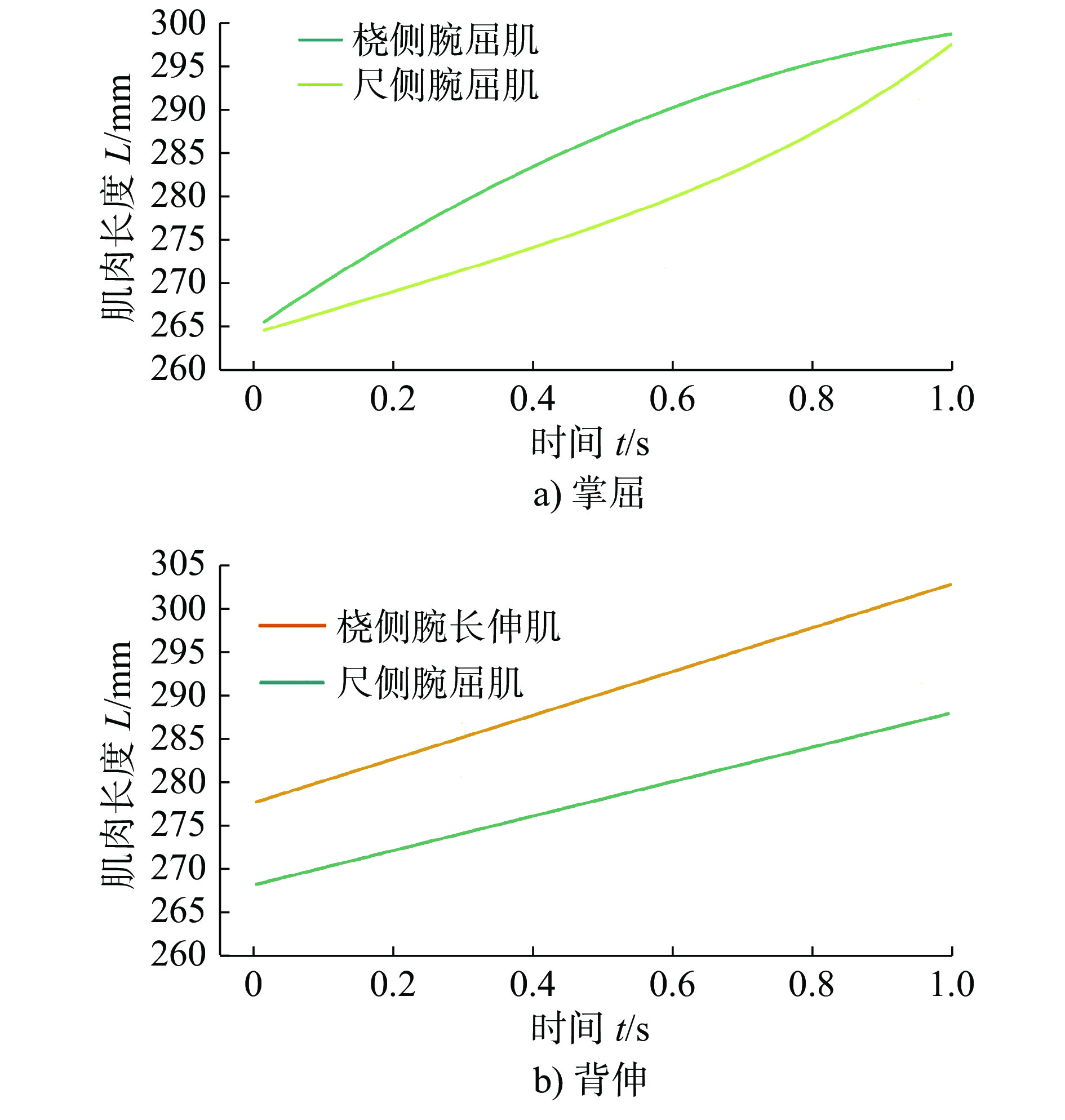
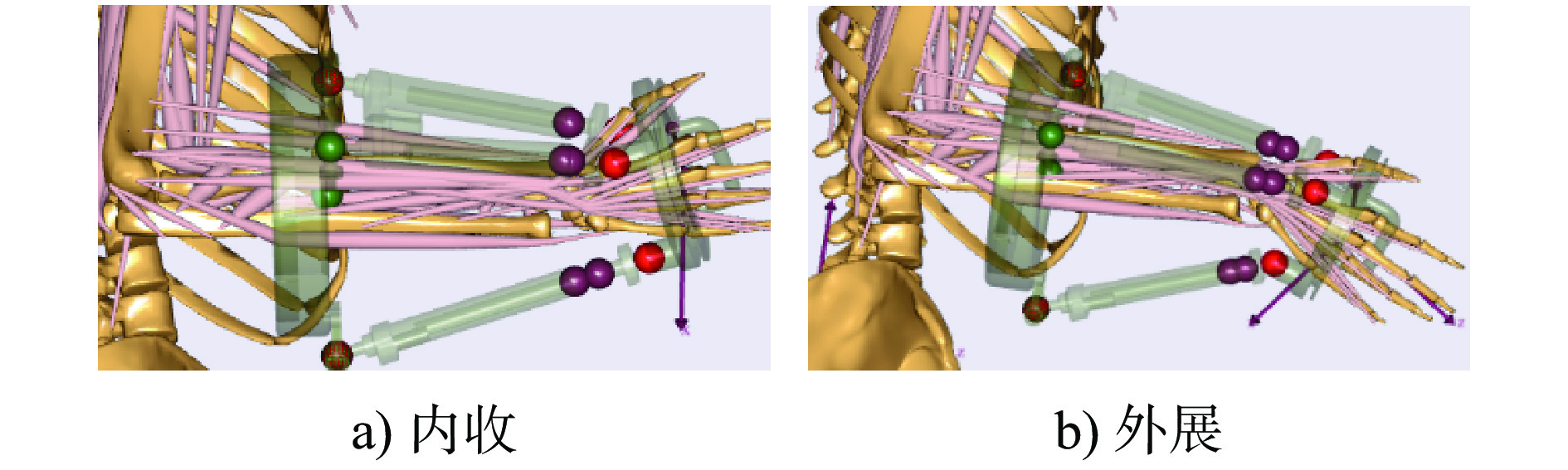
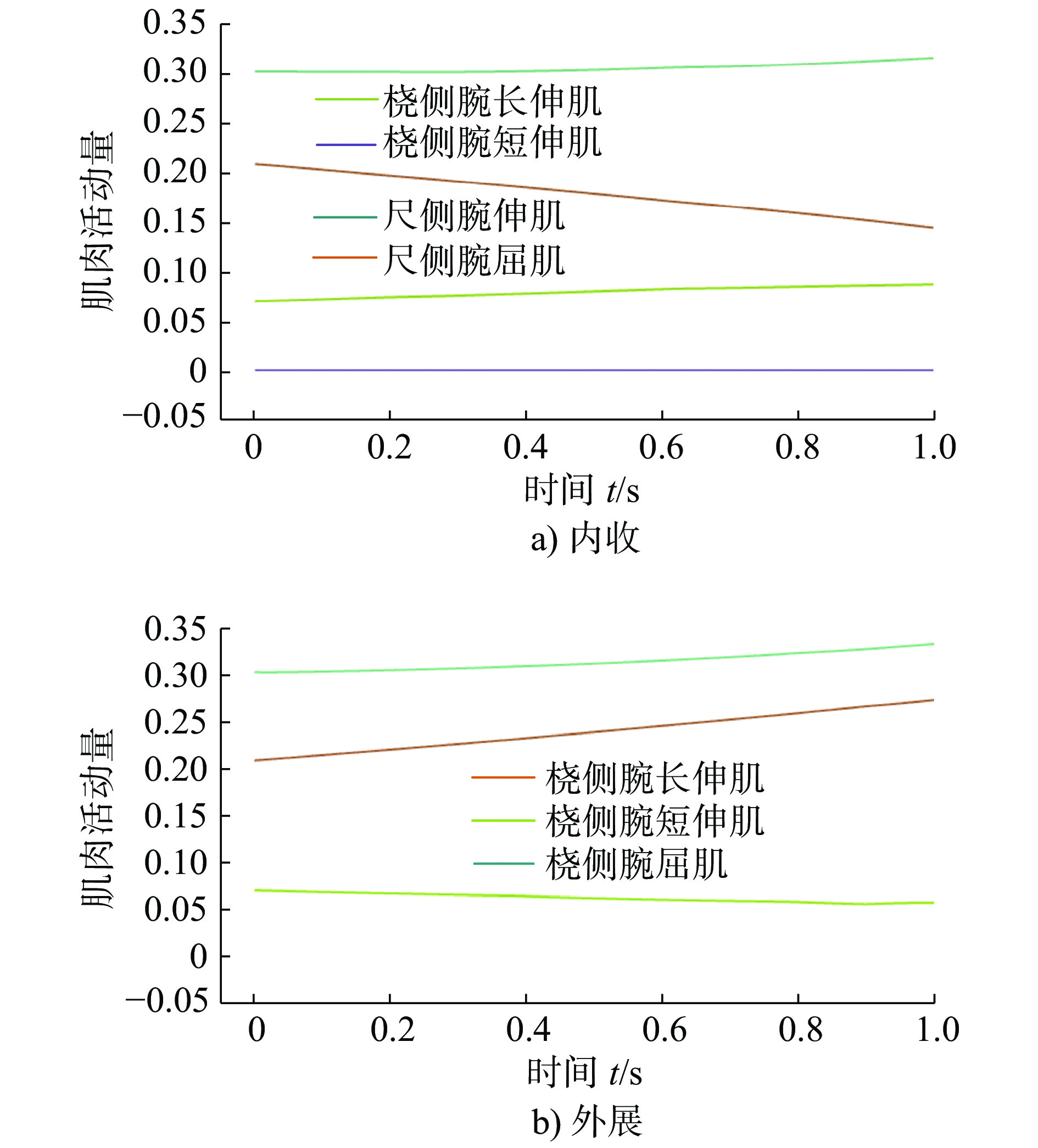
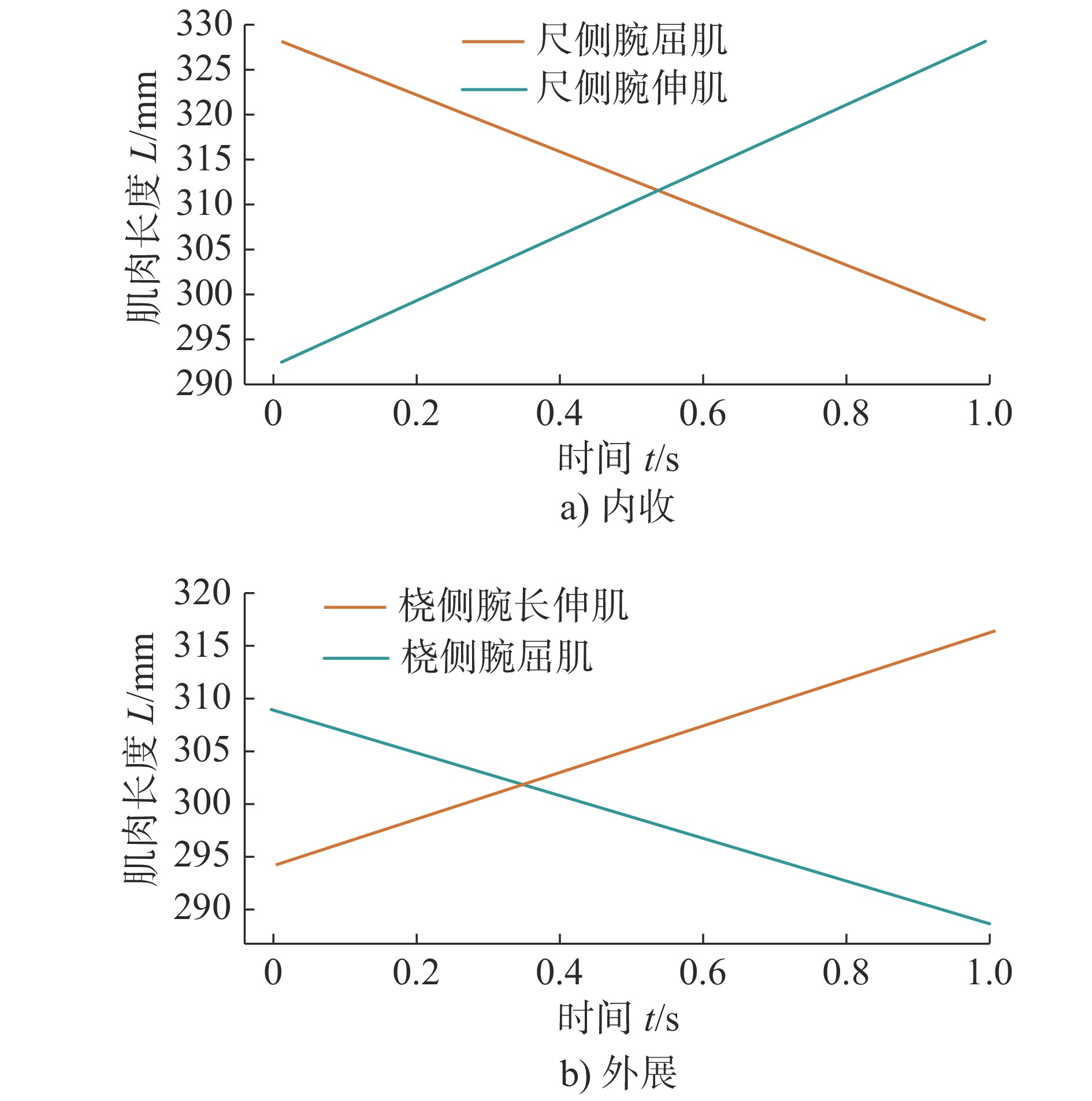
针对腕关节损伤或功能性退化患者,基于(2-RPS/UPU)&R混联机构提出一种可穿戴式腕关节康复机器人。用SolidWorks进行三维建模,导入Adams中进行正逆运动学仿真,在整个仿真过程中,曲线光滑,没有突变点,说明该腕关节康复机器人稳定性好,安全性强。利用AnyBody提取康复训练时腕关节处肌肉相关力学的变化参数,并对康复效果进行评估,结果表明该机器人带动手腕做康复运动时,腕关节周围肌肉的活动度和收缩情况符合康复医学的相关规律,不会对肌肉造成二次伤害,满足受损腕关节的康复需求。
针对腕关节损伤或功能性退化患者,基于(2-RPS/UPU)&R混联机构提出一种可穿戴式腕关节康复机器人。用SolidWorks进行三维建模,导入Adams中进行正逆运动学仿真,在整个仿真过程中,曲线光滑,没有突变点,说明该腕关节康复机器人稳定性好,安全性强。利用AnyBody提取康复训练时腕关节处肌肉相关力学的变化参数,并对康复效果进行评估,结果表明该机器人带动手腕做康复运动时,腕关节周围肌肉的活动度和收缩情况符合康复医学的相关规律,不会对肌肉造成二次伤害,满足受损腕关节的康复需求。





2022, 41(12): 1844-1851.
doi: 10.13433/j.cnki.1003-8728.20200548
摘要:
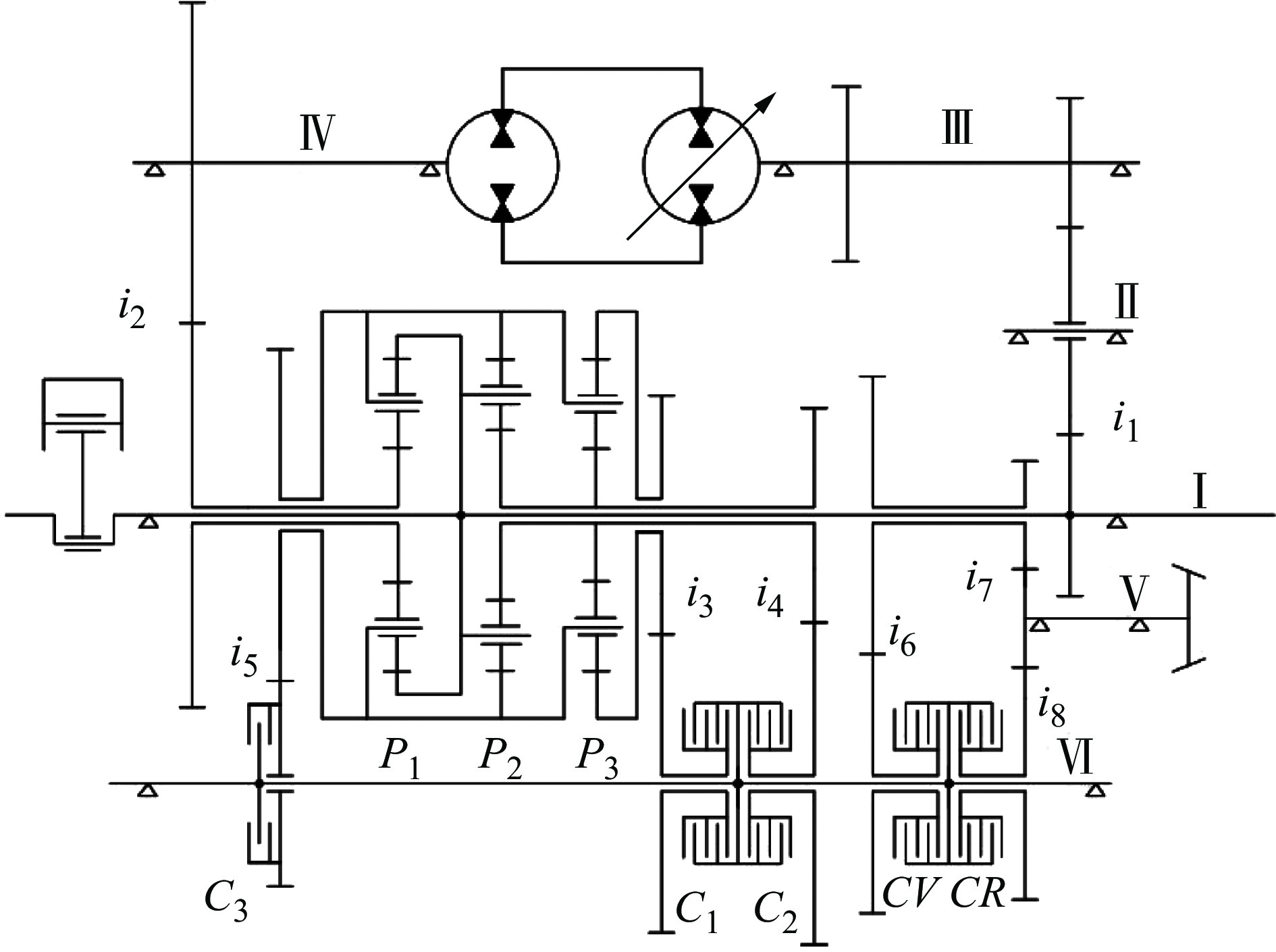
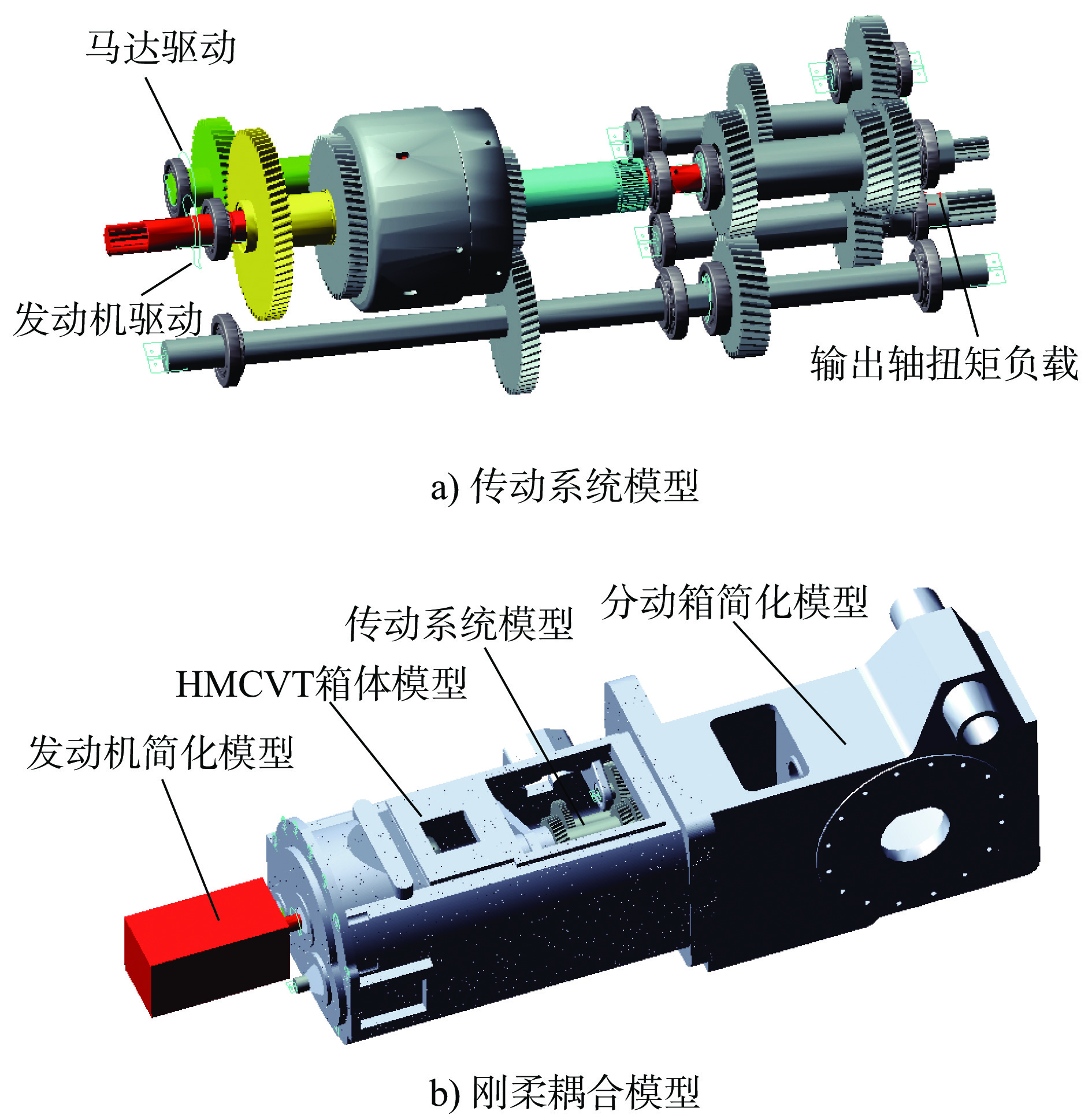
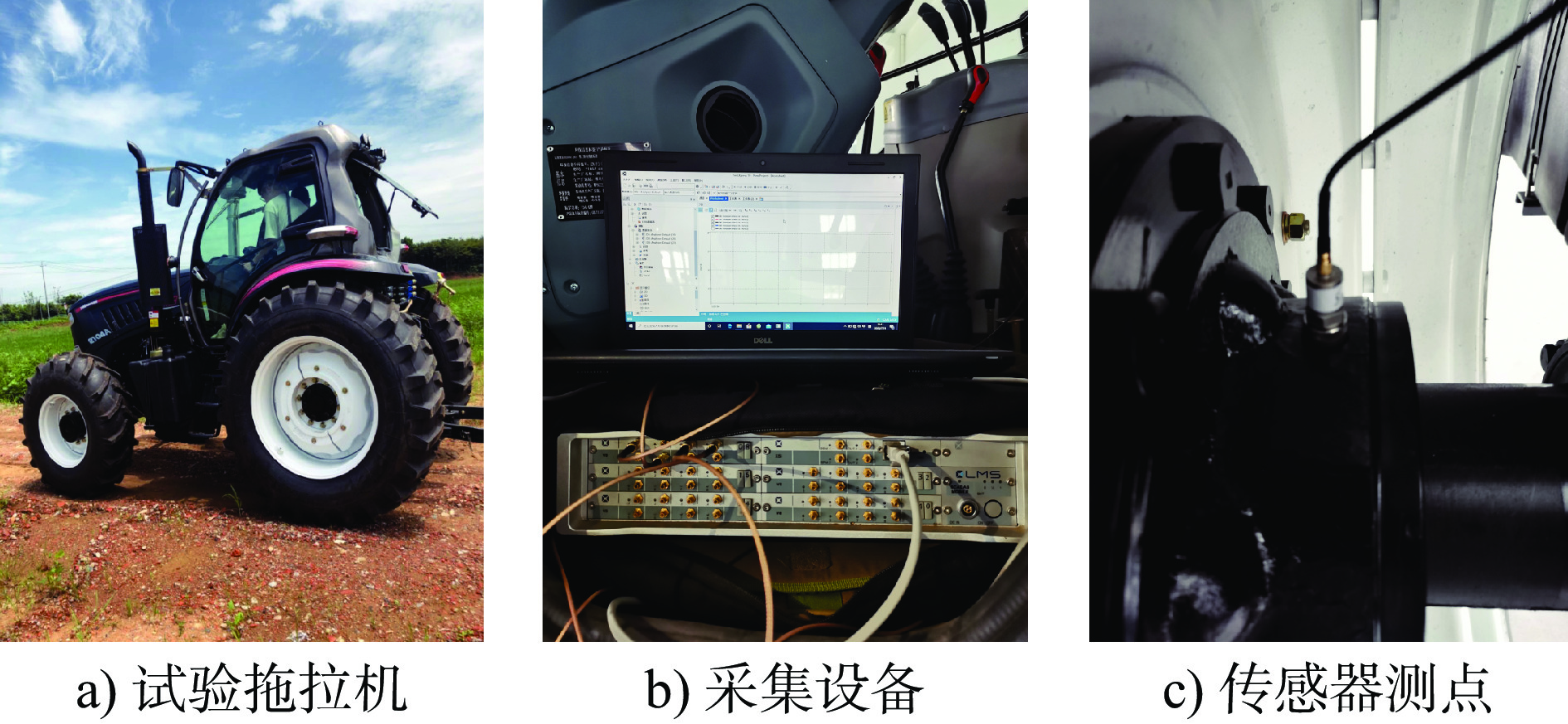
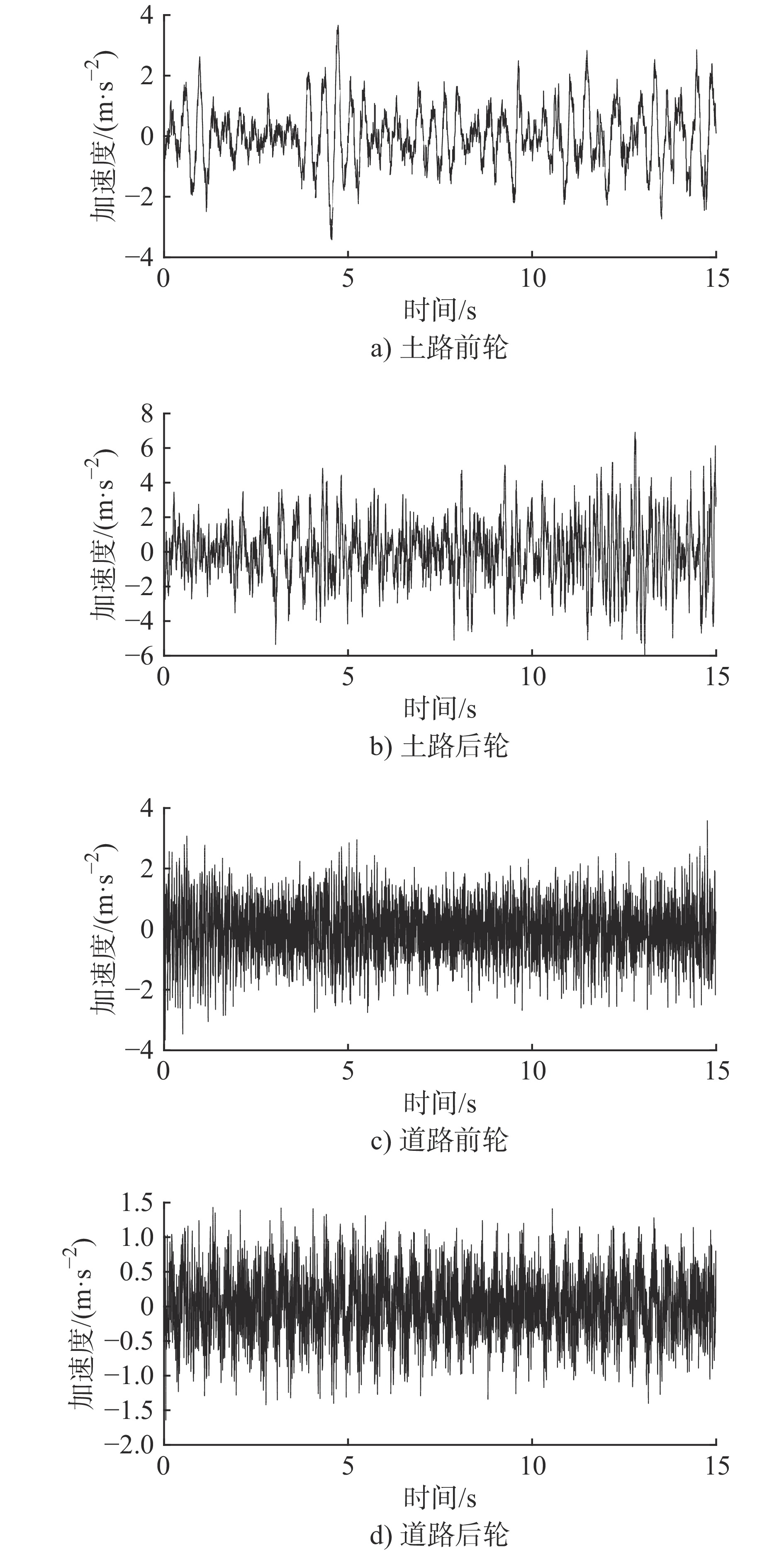
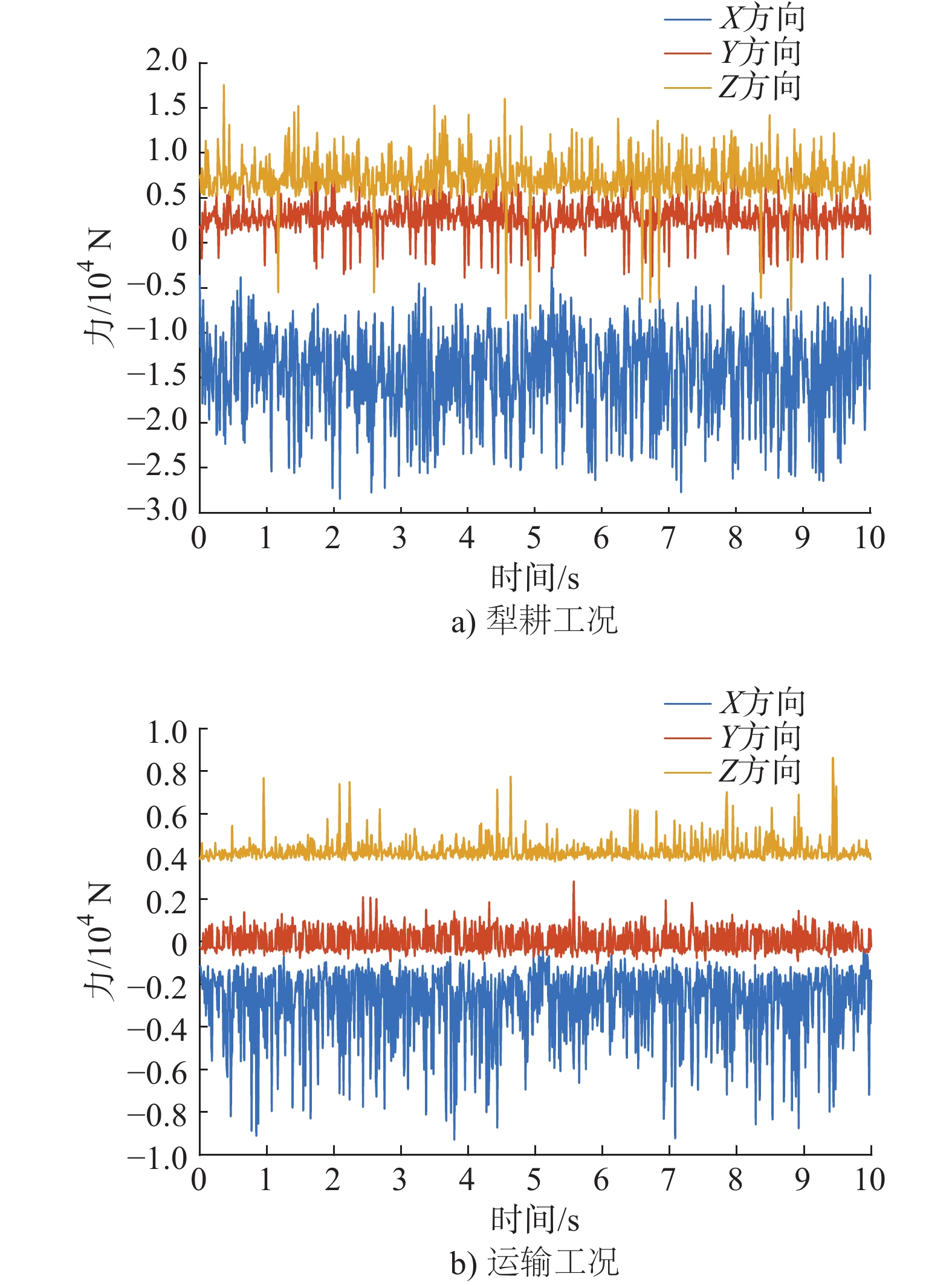
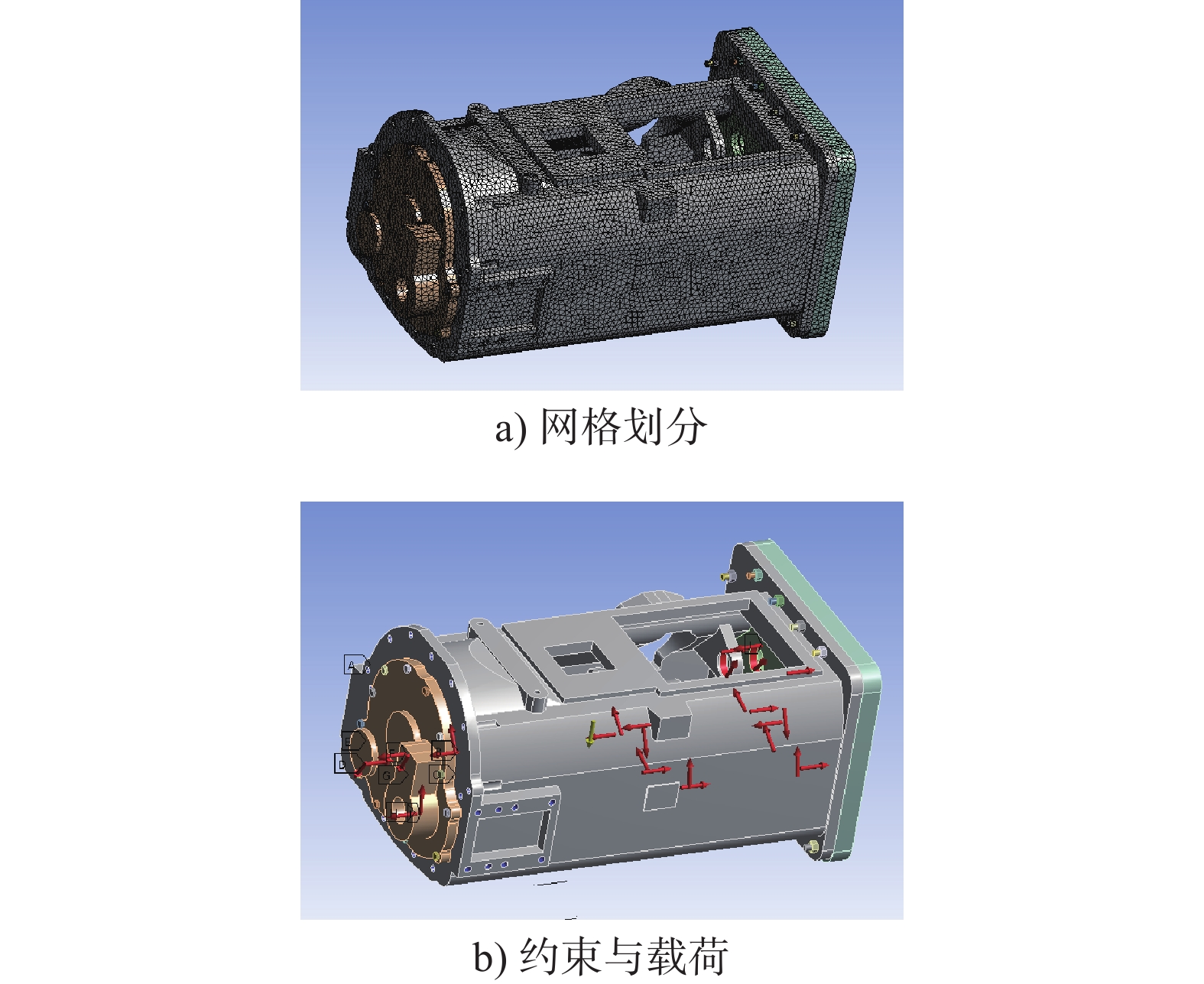
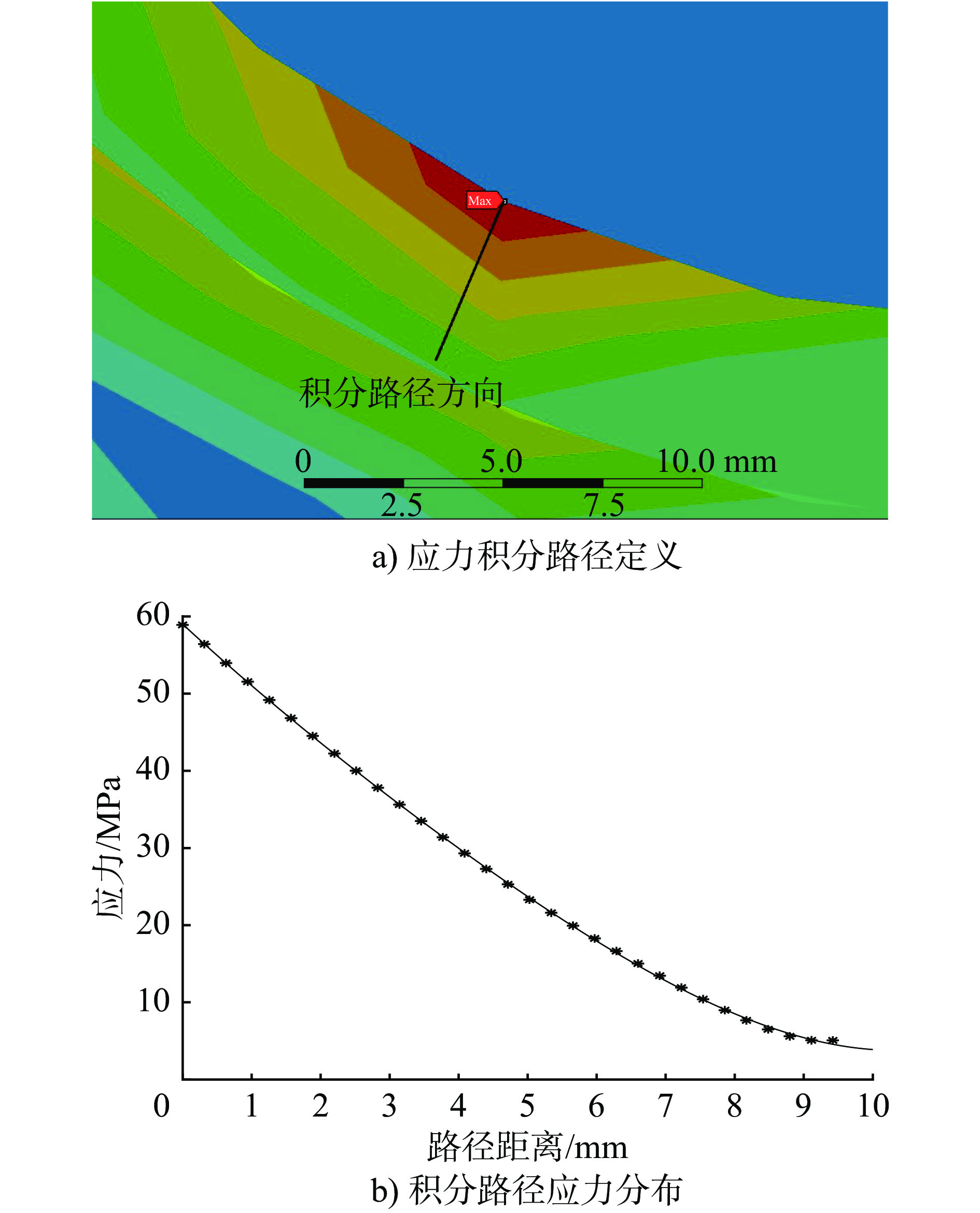
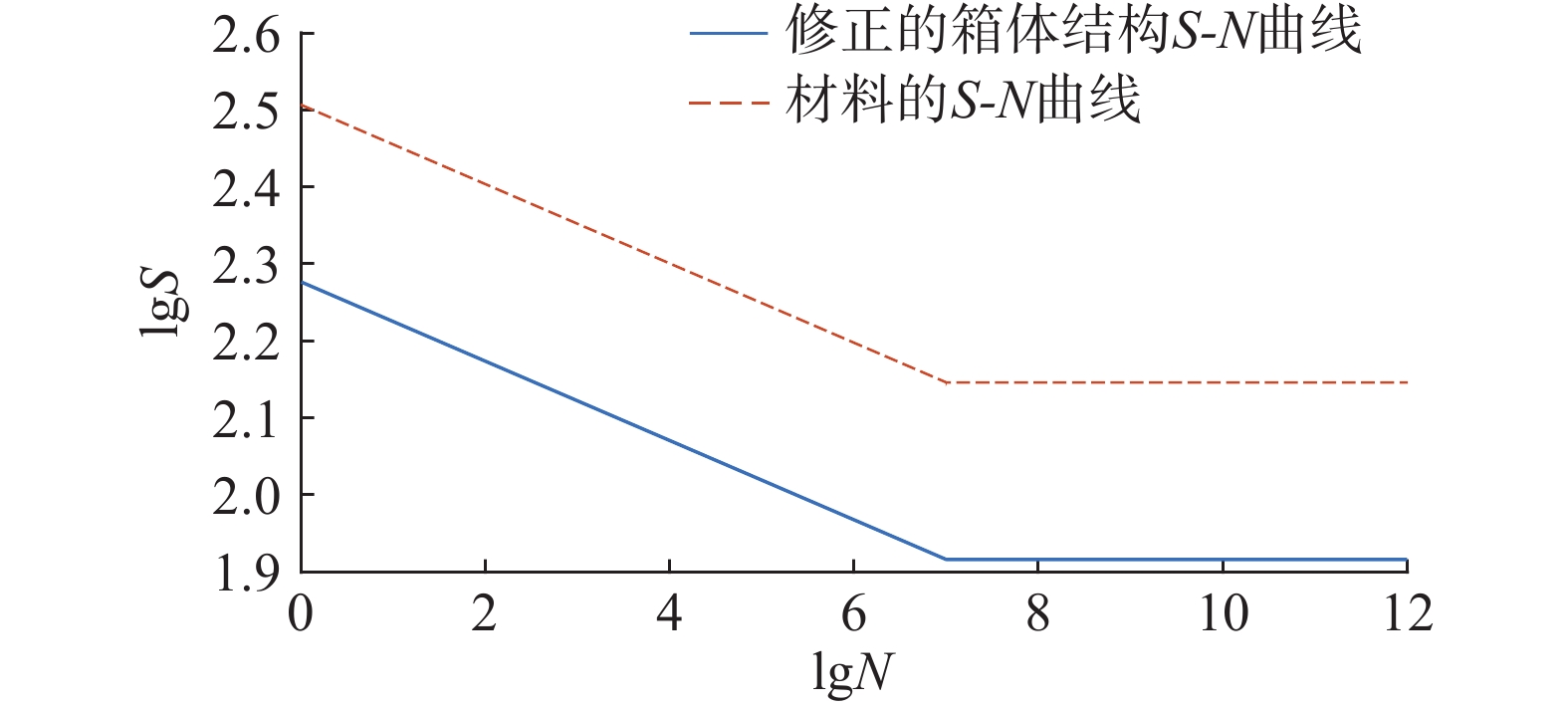
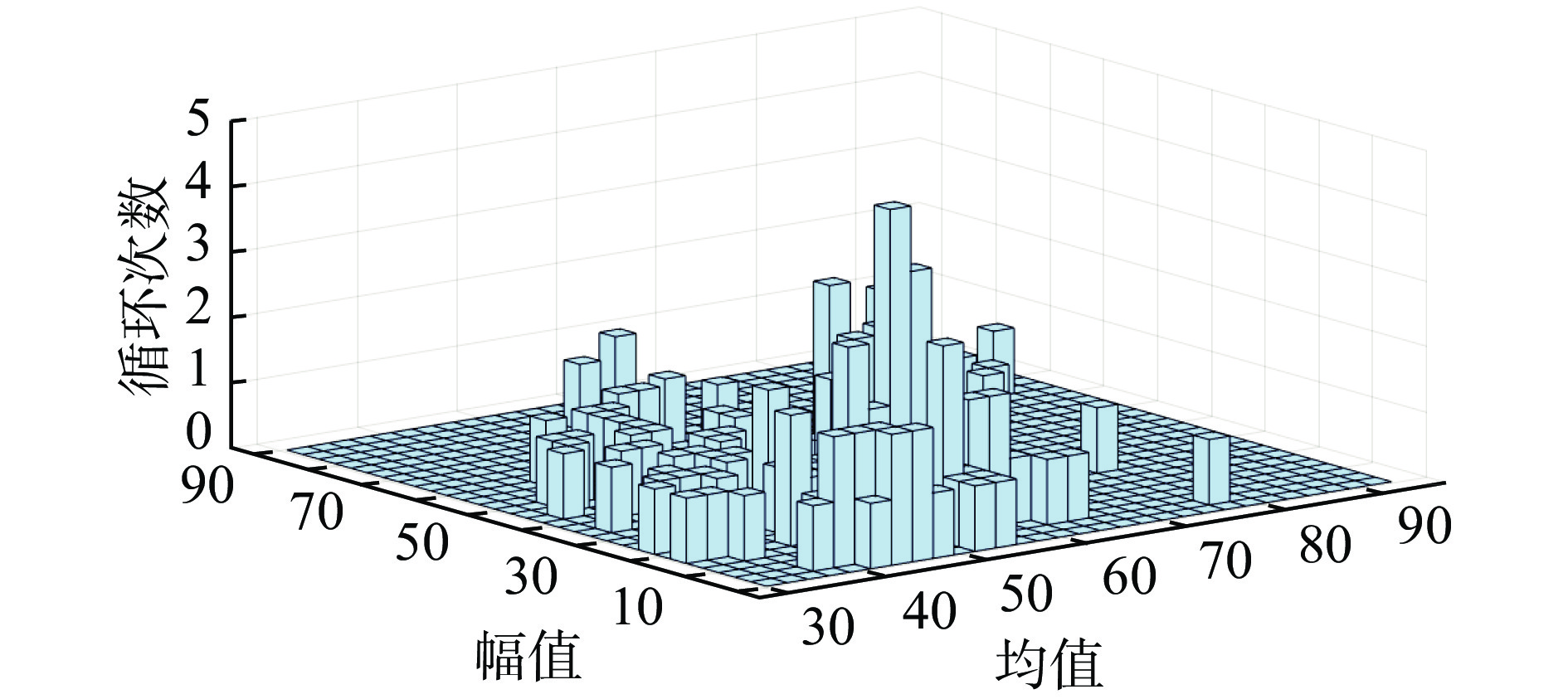
针对重型拖拉机液压机械无级变速器(简称HMCVT)实际作业过程中由于箱体受载复杂,载荷不对称从而易发生疲劳破坏的问题。本文提出了一种基于虚拟样机技术修正材料S-N曲线对HMVCT箱体进行疲劳寿命预测的方法。利用Adams建立变速器刚柔耦合虚拟样机模型,提取HMCVT箱体各轴承孔处的动态激励。综合考虑HMCVT箱体载荷特点,结构参数,表面工艺等因素,重新拟合了箱体结构S - N曲线,根据Miner线性累计损伤理论对HMCVT箱体进行疲劳寿命预测。结果表明,结构S - N曲线较传统材料S - N曲线有较大程度的修正,HMCVT箱体危险点疲劳累计损伤量为D = 4.8353×10−8,变速箱寿命为57447 h,满足全寿命使用要求。该研究为设计及优化农机装备关键零部件时的疲劳寿命预测提供了参考。
针对重型拖拉机液压机械无级变速器(简称HMCVT)实际作业过程中由于箱体受载复杂,载荷不对称从而易发生疲劳破坏的问题。本文提出了一种基于虚拟样机技术修正材料S-N曲线对HMVCT箱体进行疲劳寿命预测的方法。利用Adams建立变速器刚柔耦合虚拟样机模型,提取HMCVT箱体各轴承孔处的动态激励。综合考虑HMCVT箱体载荷特点,结构参数,表面工艺等因素,重新拟合了箱体结构S - N曲线,根据Miner线性累计损伤理论对HMCVT箱体进行疲劳寿命预测。结果表明,结构S - N曲线较传统材料S - N曲线有较大程度的修正,HMCVT箱体危险点疲劳累计损伤量为D = 4.8353×10−8,变速箱寿命为57447 h,满足全寿命使用要求。该研究为设计及优化农机装备关键零部件时的疲劳寿命预测提供了参考。

2022, 41(12): 1852-1859.
doi: 10.13433/j.cnki.1003-8728.20200517
摘要:
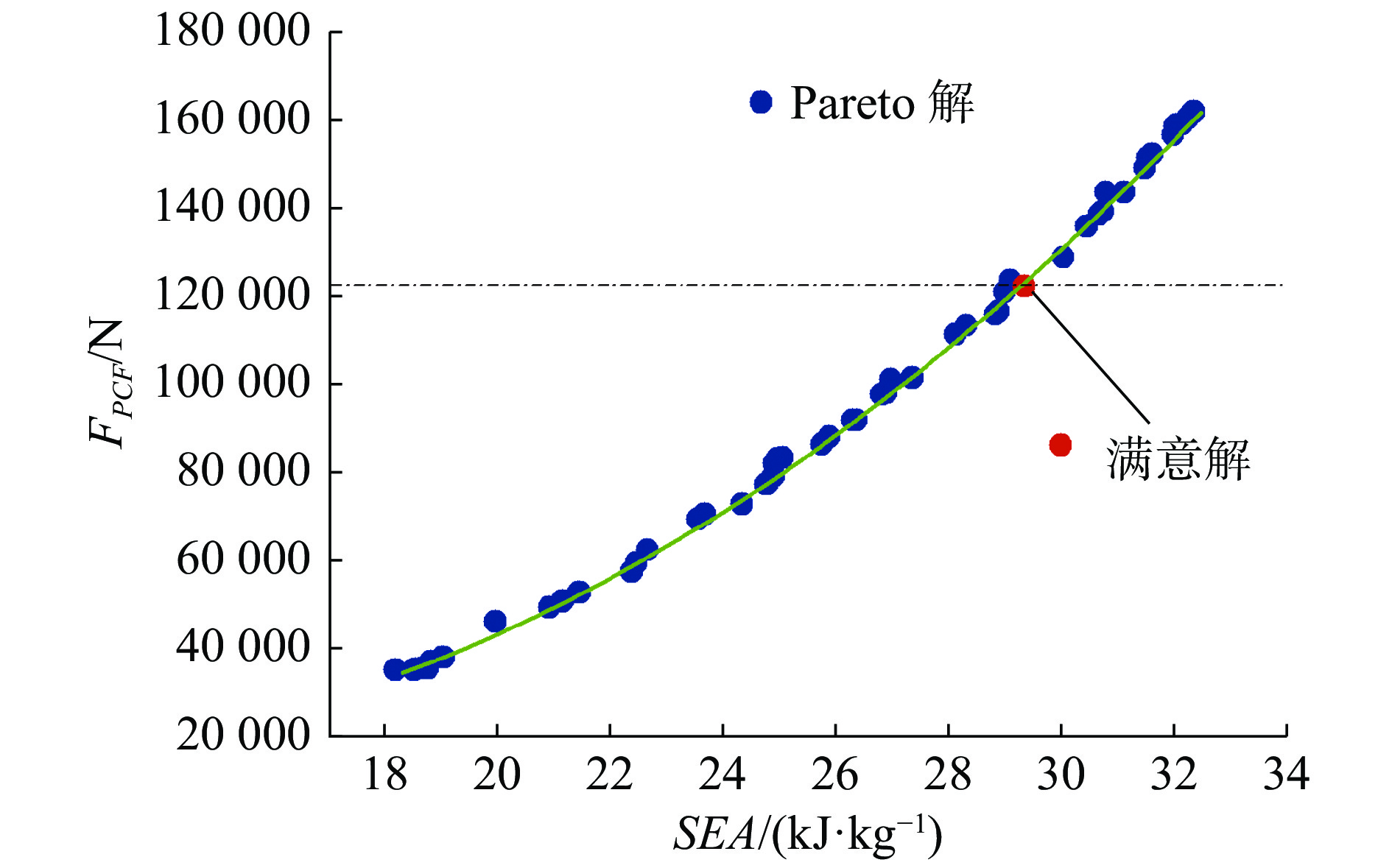
仿生结构以其优异的力学性能被广泛的应用于各种机械结构中。为了提高薄壁结构的耐撞性,将结构仿生学概念引入其结构设计中,提出了一种新型的多胞薄壁吸能结构。采用了理论和数值模拟技术对0~2阶次层次截面的薄壁结构进行对比分析,结果表明:随着仿生层次结构的不断增加,仿生薄壁结构的吸能特性与变形模式进一步提升。同时,结合响应面法和遗传算法对2阶层次截面的薄壁结构进行了优化,并得到了相应的Pareto前沿图,为薄壁结构的耐撞性设计提供了新思路。
仿生结构以其优异的力学性能被广泛的应用于各种机械结构中。为了提高薄壁结构的耐撞性,将结构仿生学概念引入其结构设计中,提出了一种新型的多胞薄壁吸能结构。采用了理论和数值模拟技术对0~2阶次层次截面的薄壁结构进行对比分析,结果表明:随着仿生层次结构的不断增加,仿生薄壁结构的吸能特性与变形模式进一步提升。同时,结合响应面法和遗传算法对2阶层次截面的薄壁结构进行了优化,并得到了相应的Pareto前沿图,为薄壁结构的耐撞性设计提供了新思路。




2022, 41(12): 1860-1868.
doi: 10.13433/j.cnki.1003-8728.20200539
摘要:
齿轮性能退化评估是预诊断的提前和基础,针对概率相似度量评估方法存在模型复杂,容易过早饱和等现象,提出一种基于AR (Autoregressive model)模型和字典学习的齿轮性能退化评估的重构模型方法,其中AR模型用于提取齿轮振动信号的状态特征,字典学习通过正常状态下构建的字典模型(Dictionary learning, DL)对测试样本进行AR模型系数重构。首先提取正常运行状态下振动信号的AR模型系数构建过完备字典模型,然后将待测信号的AR系数作为特征向量输入字典模型中得到重构后的AR模型系数。最后由原始AR系数和重构AR系数分别构造自回归模型,并各自完成对待测信号的时序建模,将两自回归模型所得残差序列的均方根误差作为性能劣化程度指标。全寿命疲劳实验数据分析结果表明,与传统时域指标相比该方法对早期故障更敏感且具有与齿轮故障发展趋势一致性更好等优点。
齿轮性能退化评估是预诊断的提前和基础,针对概率相似度量评估方法存在模型复杂,容易过早饱和等现象,提出一种基于AR (Autoregressive model)模型和字典学习的齿轮性能退化评估的重构模型方法,其中AR模型用于提取齿轮振动信号的状态特征,字典学习通过正常状态下构建的字典模型(Dictionary learning, DL)对测试样本进行AR模型系数重构。首先提取正常运行状态下振动信号的AR模型系数构建过完备字典模型,然后将待测信号的AR系数作为特征向量输入字典模型中得到重构后的AR模型系数。最后由原始AR系数和重构AR系数分别构造自回归模型,并各自完成对待测信号的时序建模,将两自回归模型所得残差序列的均方根误差作为性能劣化程度指标。全寿命疲劳实验数据分析结果表明,与传统时域指标相比该方法对早期故障更敏感且具有与齿轮故障发展趋势一致性更好等优点。














2022, 41(12): 1869-1876.
doi: 10.13433/j.cnki.1003-8728.20200532
摘要:
针对4-Mecanum轮全向移动机器人轨迹跟踪问题,设计了一种自抗扰控制器。首先对机器人的运动学与动力学模型进行分析;其次由反步法设计运动学控制器,并根据机器人在运动过程中受到未知干扰的现象,设计了改进的扩张状态观测器和动力学控制器;最后在不同扰动的作用下进行仿真。对比结果表明该控制器跟踪误差小,收敛速度快,观测器能够快速准确地估计出不确定因素对机器人的扰动并进行实时补偿,验证了该控制器具有较好的抗干扰性和鲁棒性。
针对4-Mecanum轮全向移动机器人轨迹跟踪问题,设计了一种自抗扰控制器。首先对机器人的运动学与动力学模型进行分析;其次由反步法设计运动学控制器,并根据机器人在运动过程中受到未知干扰的现象,设计了改进的扩张状态观测器和动力学控制器;最后在不同扰动的作用下进行仿真。对比结果表明该控制器跟踪误差小,收敛速度快,观测器能够快速准确地估计出不确定因素对机器人的扰动并进行实时补偿,验证了该控制器具有较好的抗干扰性和鲁棒性。












2022, 41(12): 1877-1886.
doi: 10.13433/j.cnki.1003-8728.20220299
摘要:
为减少金属橡胶减振器的故障率,降低因金属橡胶减振器损坏而产生的经济损失。通过对金属橡胶减振器的故障原因进行分析,并建立仿真模型进行仿真分析并对金属橡胶减振器进行理论分析,提出金属橡胶减振器的优化方法。建立金属橡胶减振器数学模型,利用遗传算法对金属橡胶减振器进行整体的优化,并结合有限元分析对优化结果进行确定,最终进行实验验证。结果表明:优化后的金属橡胶减振器的刚度有明显的提高,金属橡胶减振器的抗压能力也得到了一定的提高,仿真结果与实验结果存在一定的误差,但优化后的金属橡胶减振器满足运载车辆工作要求,优化达到了预期的目标。
为减少金属橡胶减振器的故障率,降低因金属橡胶减振器损坏而产生的经济损失。通过对金属橡胶减振器的故障原因进行分析,并建立仿真模型进行仿真分析并对金属橡胶减振器进行理论分析,提出金属橡胶减振器的优化方法。建立金属橡胶减振器数学模型,利用遗传算法对金属橡胶减振器进行整体的优化,并结合有限元分析对优化结果进行确定,最终进行实验验证。结果表明:优化后的金属橡胶减振器的刚度有明显的提高,金属橡胶减振器的抗压能力也得到了一定的提高,仿真结果与实验结果存在一定的误差,但优化后的金属橡胶减振器满足运载车辆工作要求,优化达到了预期的目标。






















2022, 41(12): 1887-1893.
doi: 10.13433/j.cnki.1003-8728.20220313
摘要:
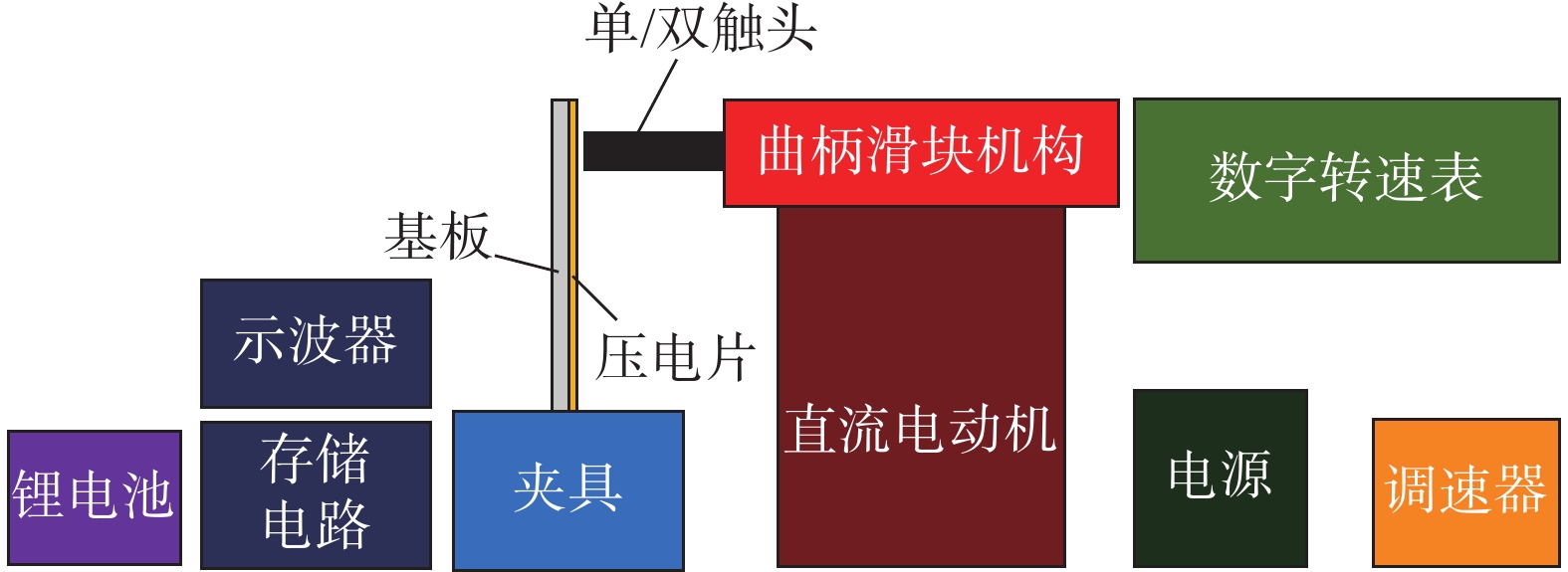
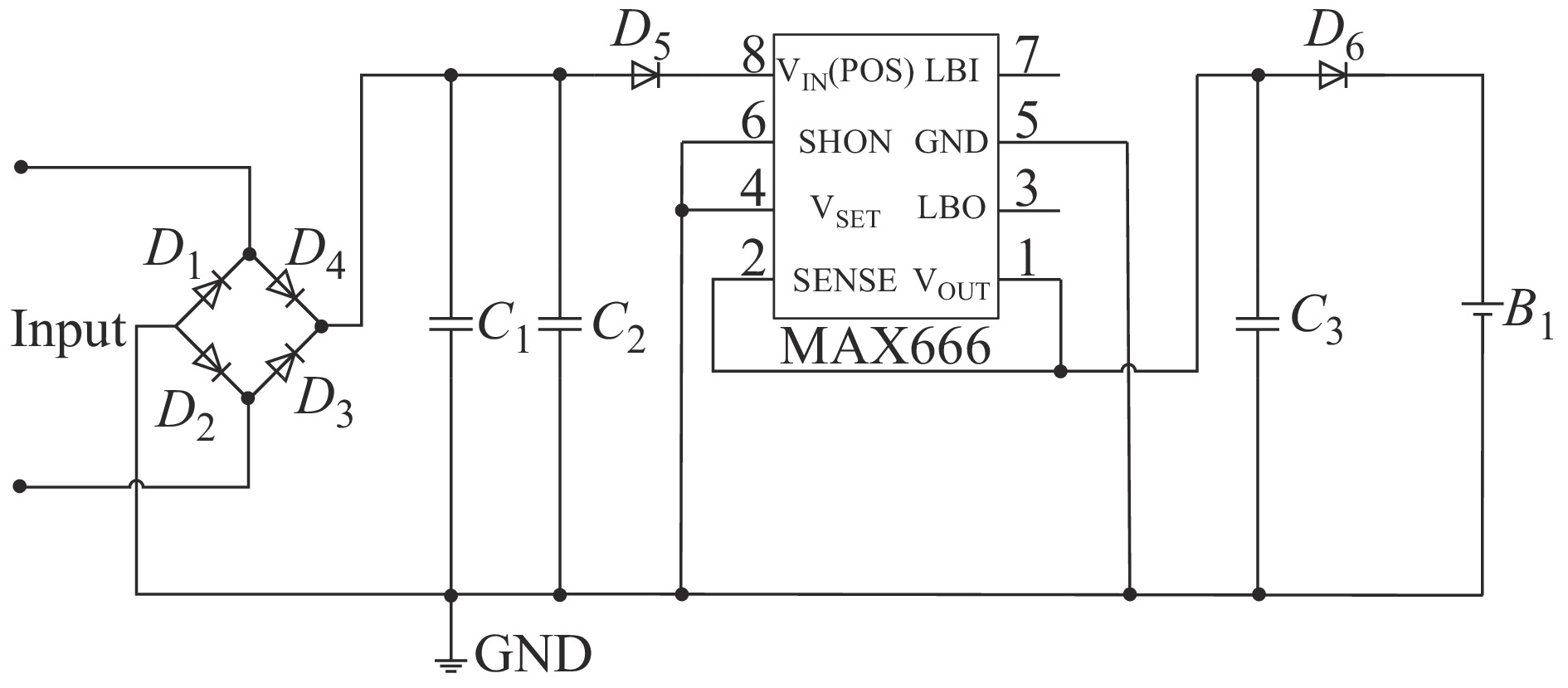
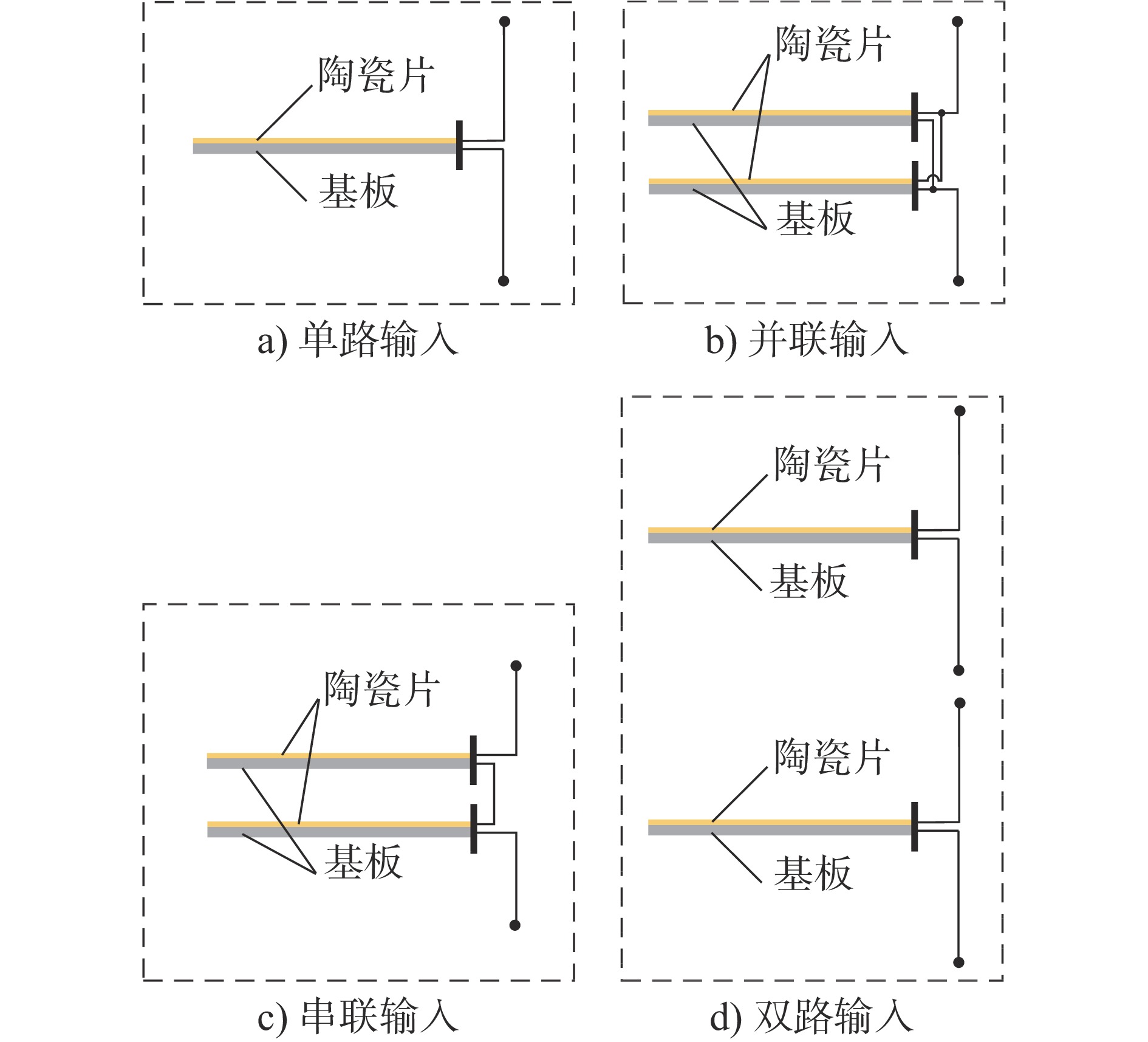
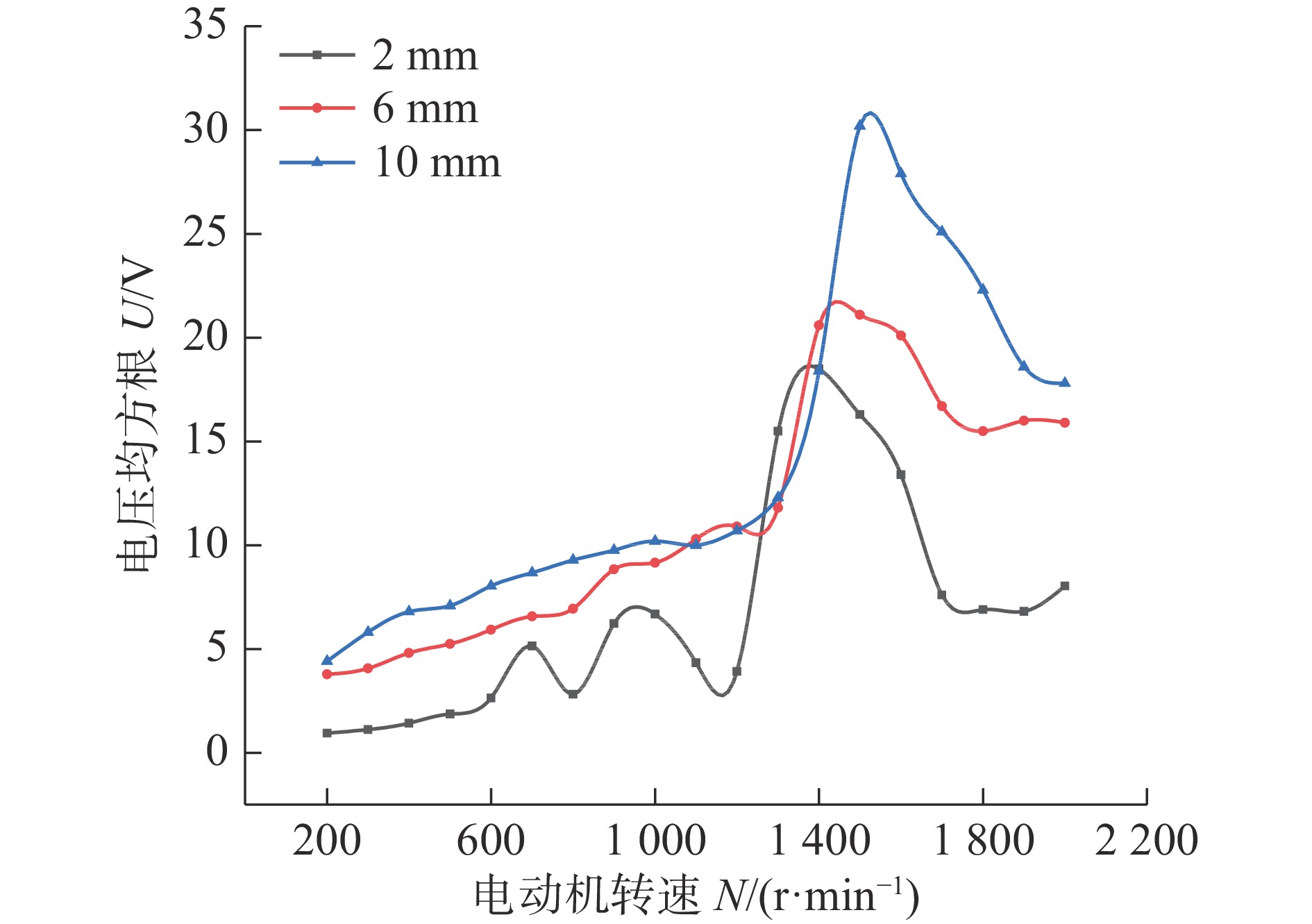
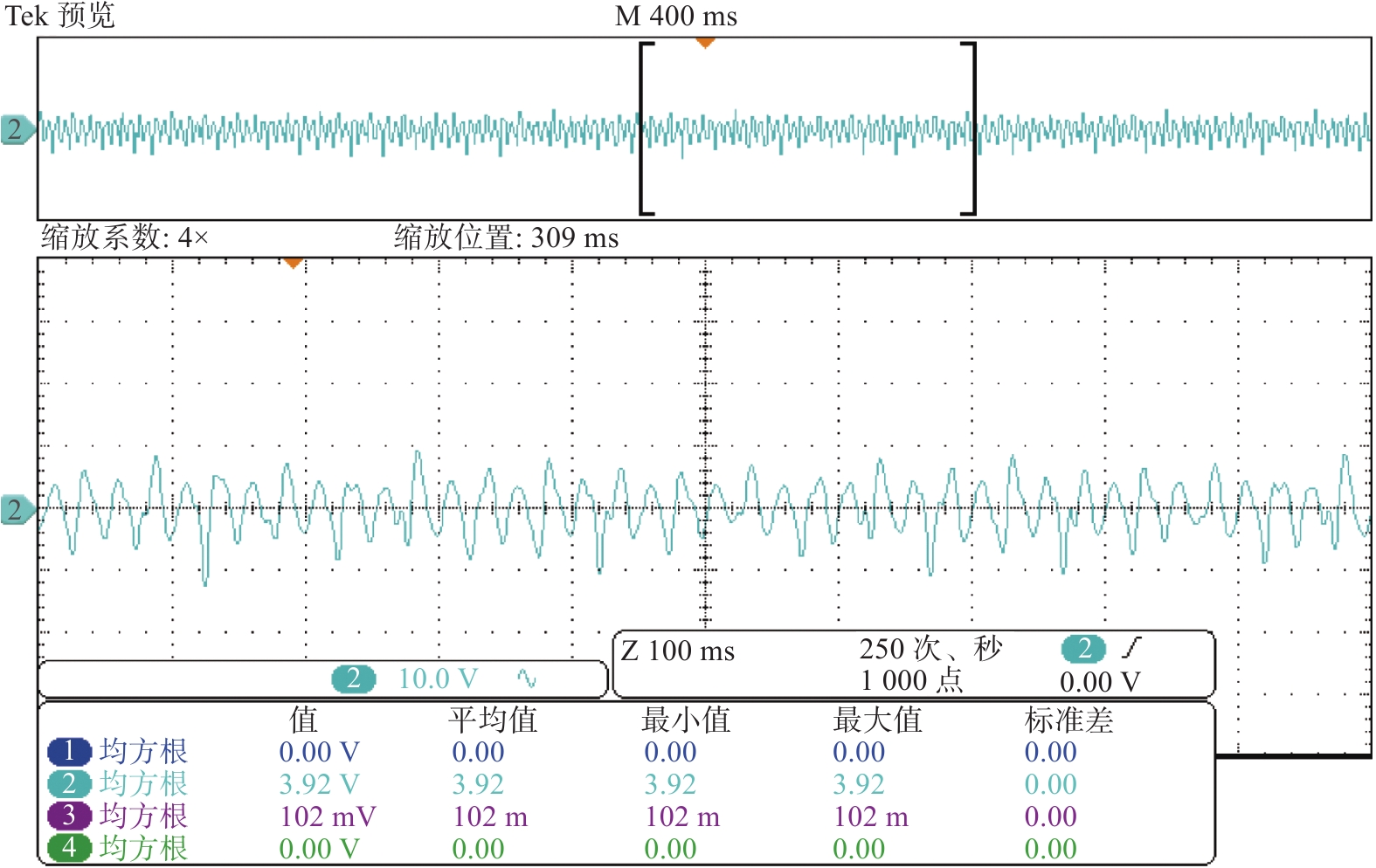
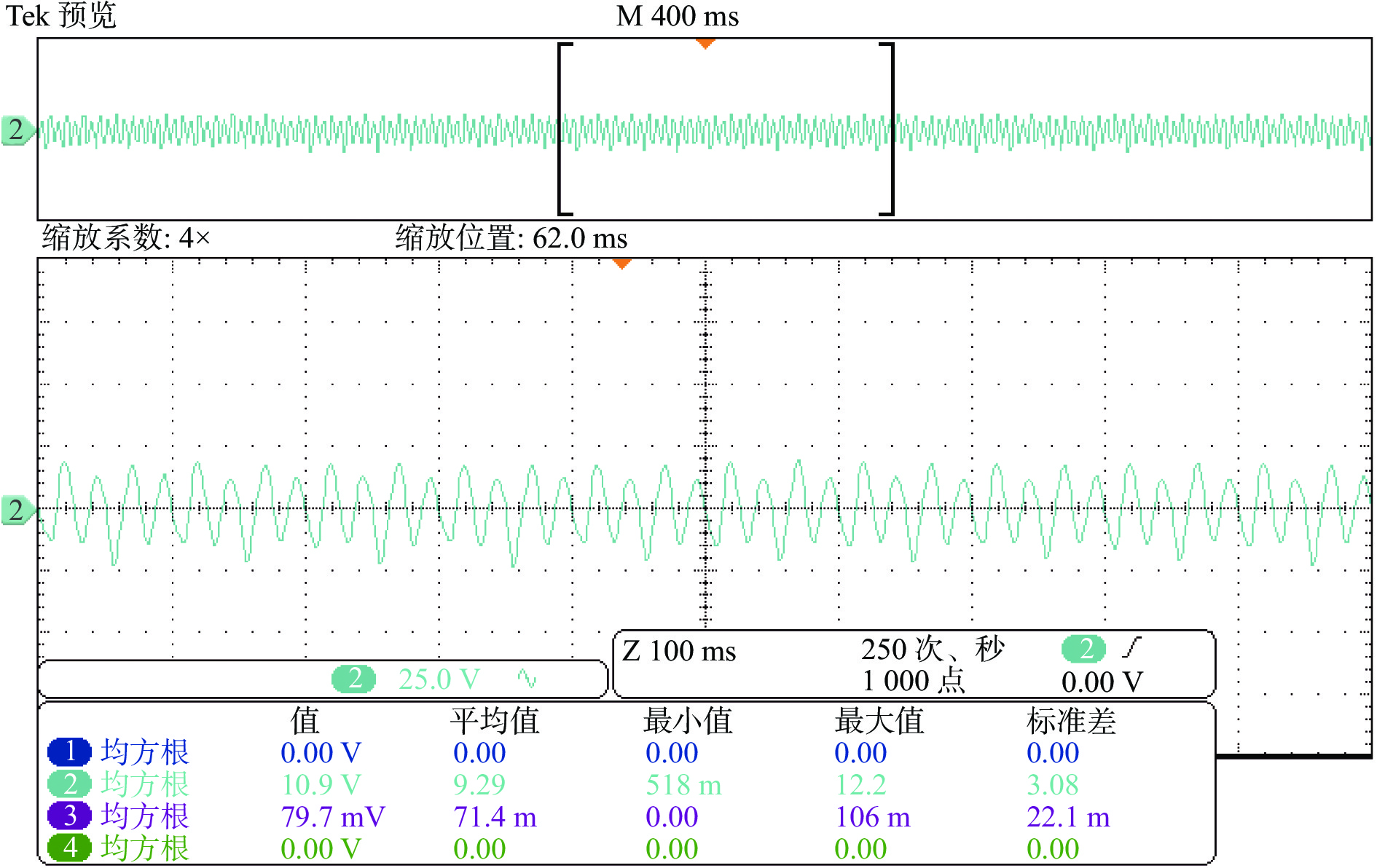
为研究不同因素对压电陶瓷俘能影响规律,提高能量俘获效率,本文以锆钛酸铅压电陶瓷(lead zirconate titanate piezoelectric ceramics,PZT)为研究对象。首先,搭建实验测试平台,通过实验获得了3种不同振幅(2、6、10 mm)下PZT输出电压与激励频率的关系,得到被测样件的最佳俘能参数;其次,在对存储电路进行优化的基础上,分别将PZT以单张、双张串联、双张并联以及双路输入的方式接入存储电路,各自在最佳俘能参数下振动30 min,为存储电路中的锂电池进行充电;最后,通过对比锂电池带动二极管的时长来评估不同输入方式的俘能效率。研究结果表明,在以最佳俘能参数振动30 min后,并联方式的俘能效率最高,可使功率为60 mW的二极管持续工作120 s。
为研究不同因素对压电陶瓷俘能影响规律,提高能量俘获效率,本文以锆钛酸铅压电陶瓷(lead zirconate titanate piezoelectric ceramics,PZT)为研究对象。首先,搭建实验测试平台,通过实验获得了3种不同振幅(2、6、10 mm)下PZT输出电压与激励频率的关系,得到被测样件的最佳俘能参数;其次,在对存储电路进行优化的基础上,分别将PZT以单张、双张串联、双张并联以及双路输入的方式接入存储电路,各自在最佳俘能参数下振动30 min,为存储电路中的锂电池进行充电;最后,通过对比锂电池带动二极管的时长来评估不同输入方式的俘能效率。研究结果表明,在以最佳俘能参数振动30 min后,并联方式的俘能效率最高,可使功率为60 mW的二极管持续工作120 s。




2022, 41(12): 1894-1899.
doi: 10.13433/j.cnki.1003-8728.20200533
摘要:
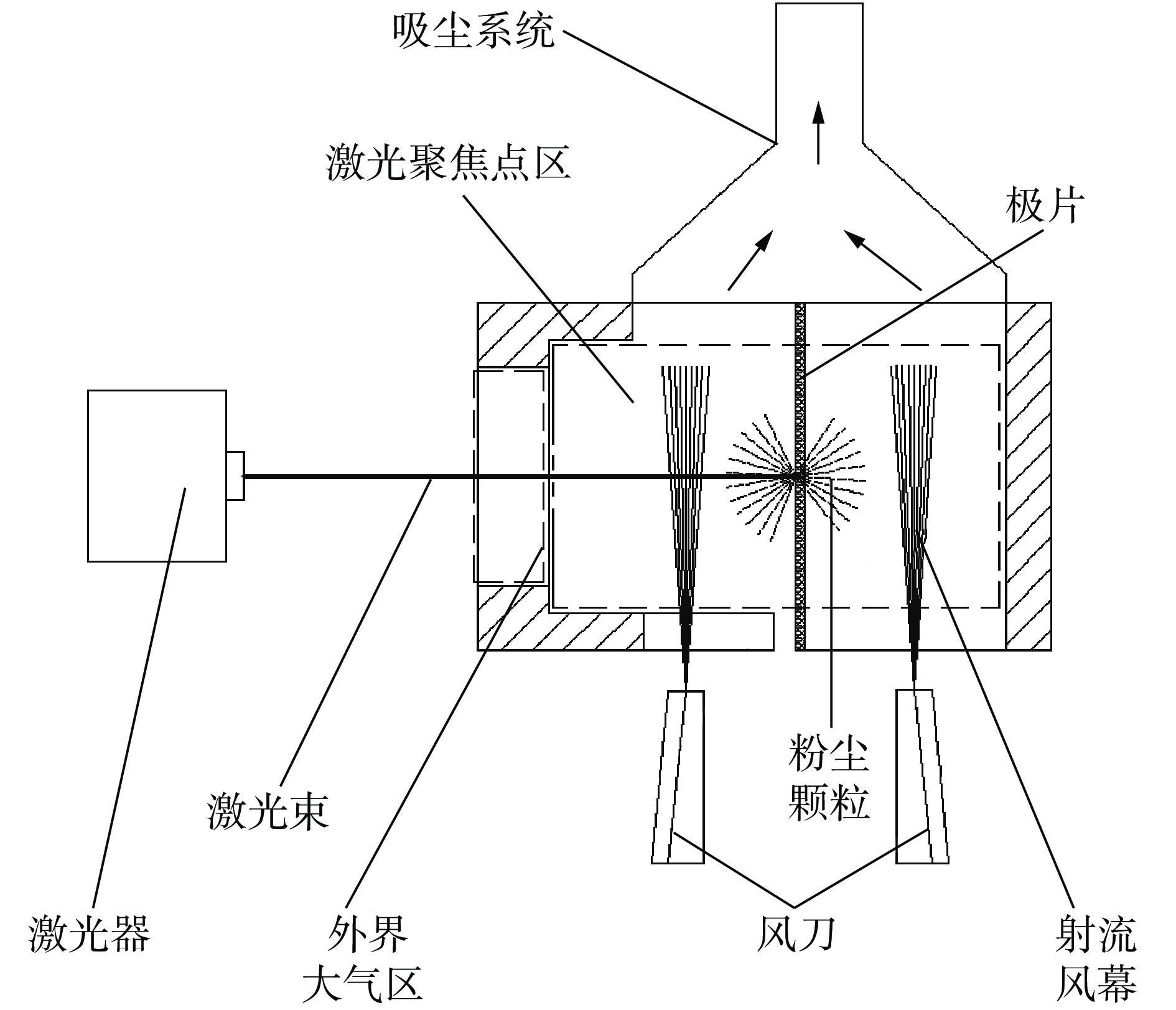
为了验证锂离子电池激光模切工位中除尘系统的可靠性,以激光模切工位腔体中喷射颗粒运动过程为研究对象,对腔体中粉尘颗粒运动过程进行仿真。提出了风刀射流风幕阻断除尘的工作原理,同时对整个风刀阻断除尘过程进行仿真研究,得到了粉尘颗粒运动轨迹规律,统计出腔体中粉尘颗粒最终去向占比依次为系统除尘(61.07%)>附着壁面(21.25%)> 附着极片(10.01%)> 逃逸(7.69%)。
为了验证锂离子电池激光模切工位中除尘系统的可靠性,以激光模切工位腔体中喷射颗粒运动过程为研究对象,对腔体中粉尘颗粒运动过程进行仿真。提出了风刀射流风幕阻断除尘的工作原理,同时对整个风刀阻断除尘过程进行仿真研究,得到了粉尘颗粒运动轨迹规律,统计出腔体中粉尘颗粒最终去向占比依次为系统除尘(61.07%)>附着壁面(21.25%)> 附着极片(10.01%)> 逃逸(7.69%)。





2022, 41(12): 1900-1906.
doi: 10.13433/j.cnki.1003-8728.20200550
摘要:
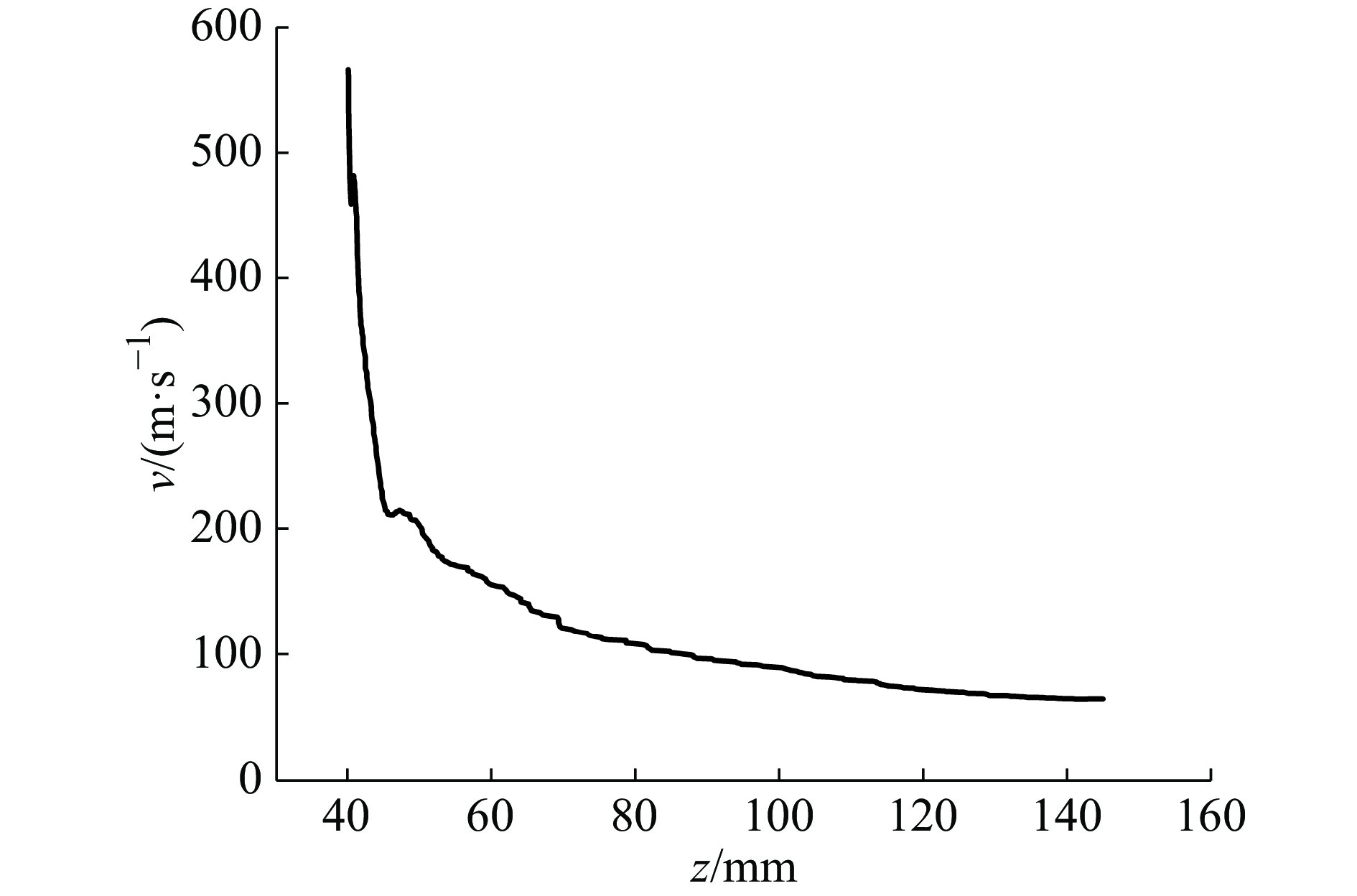
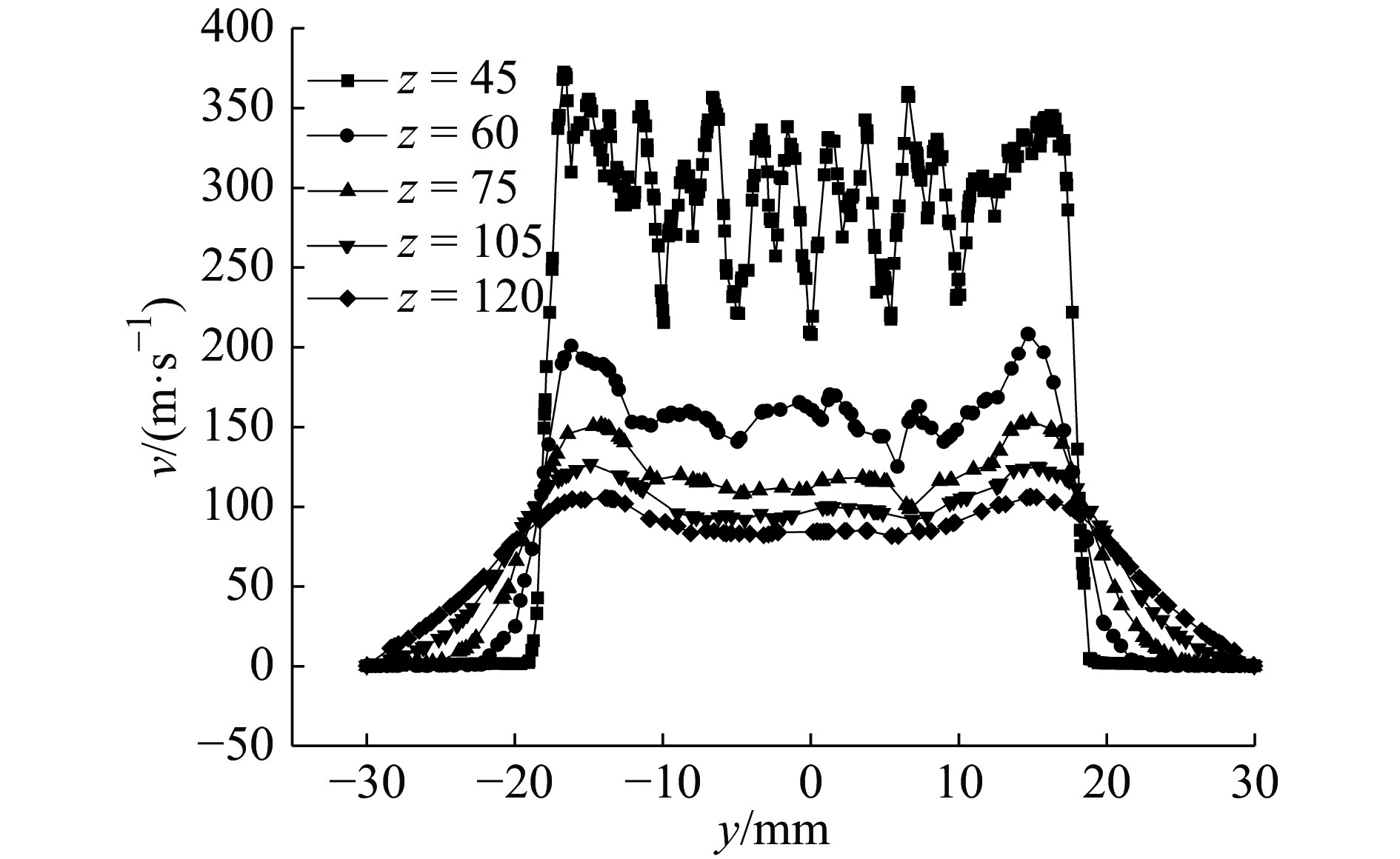
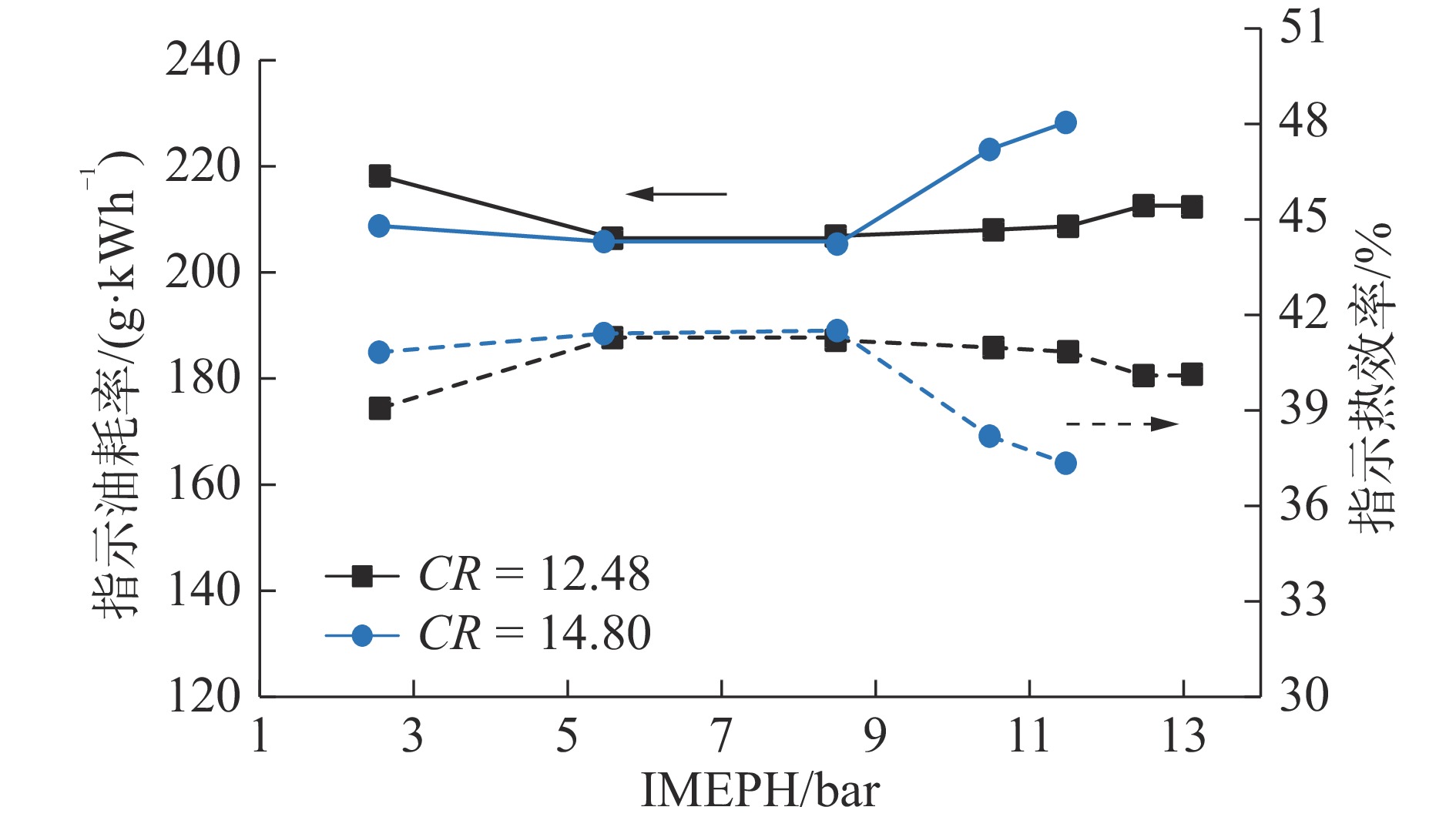
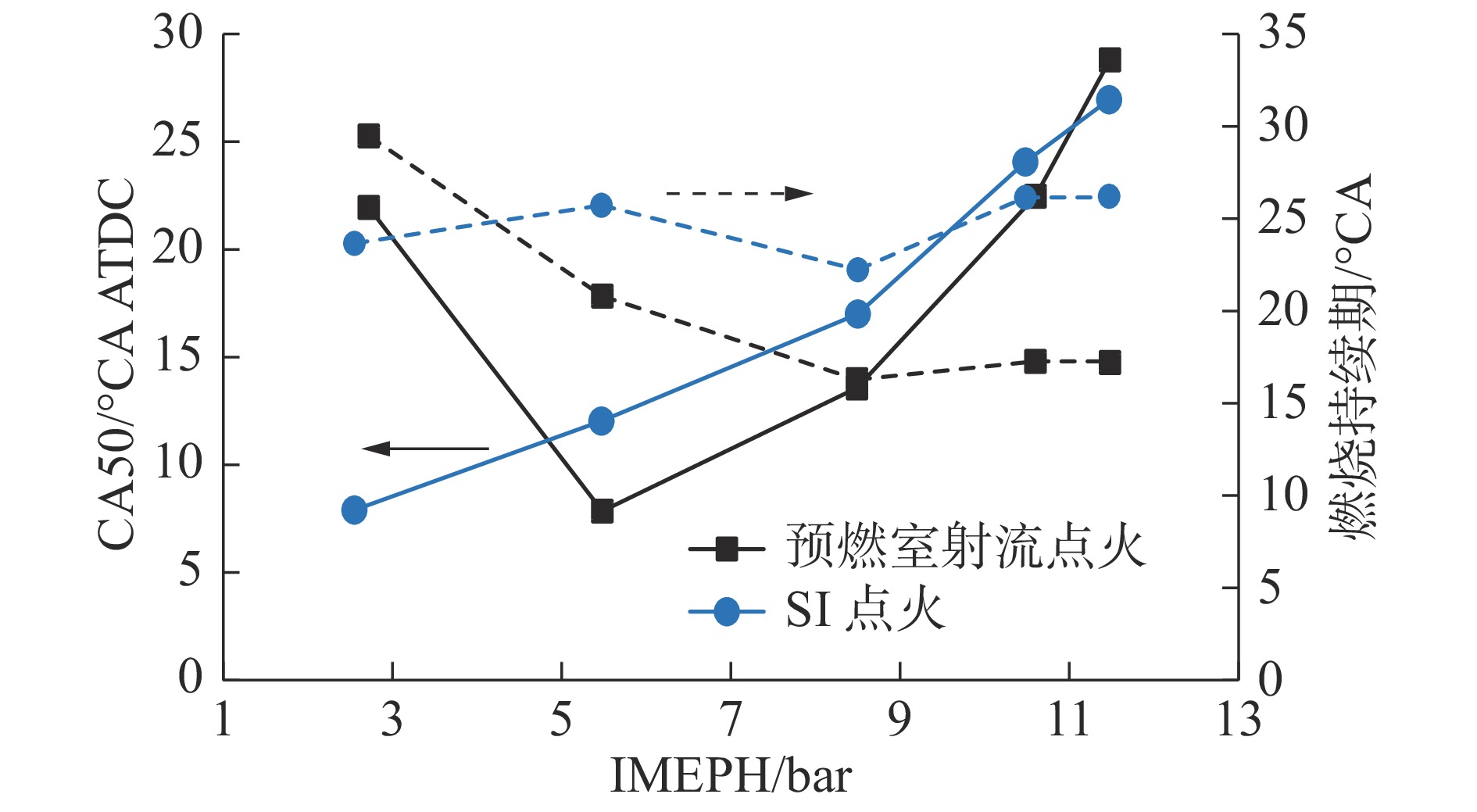
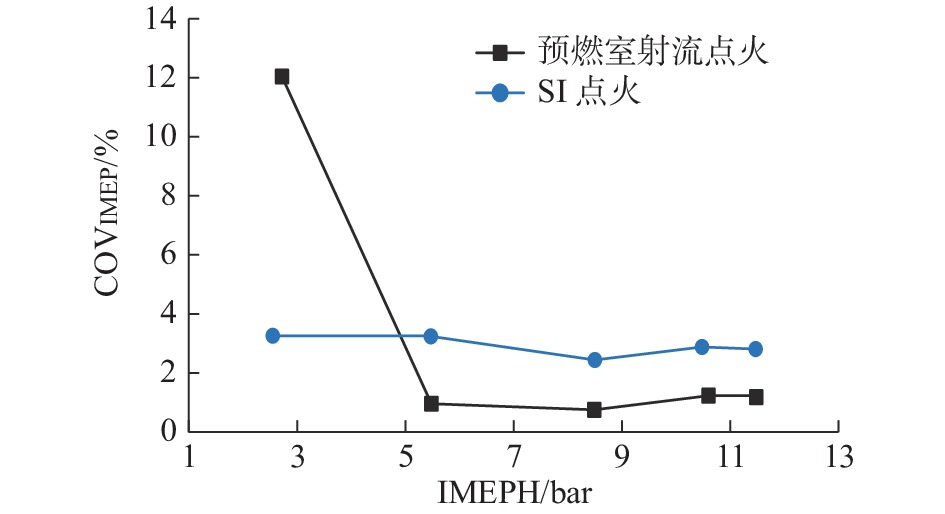
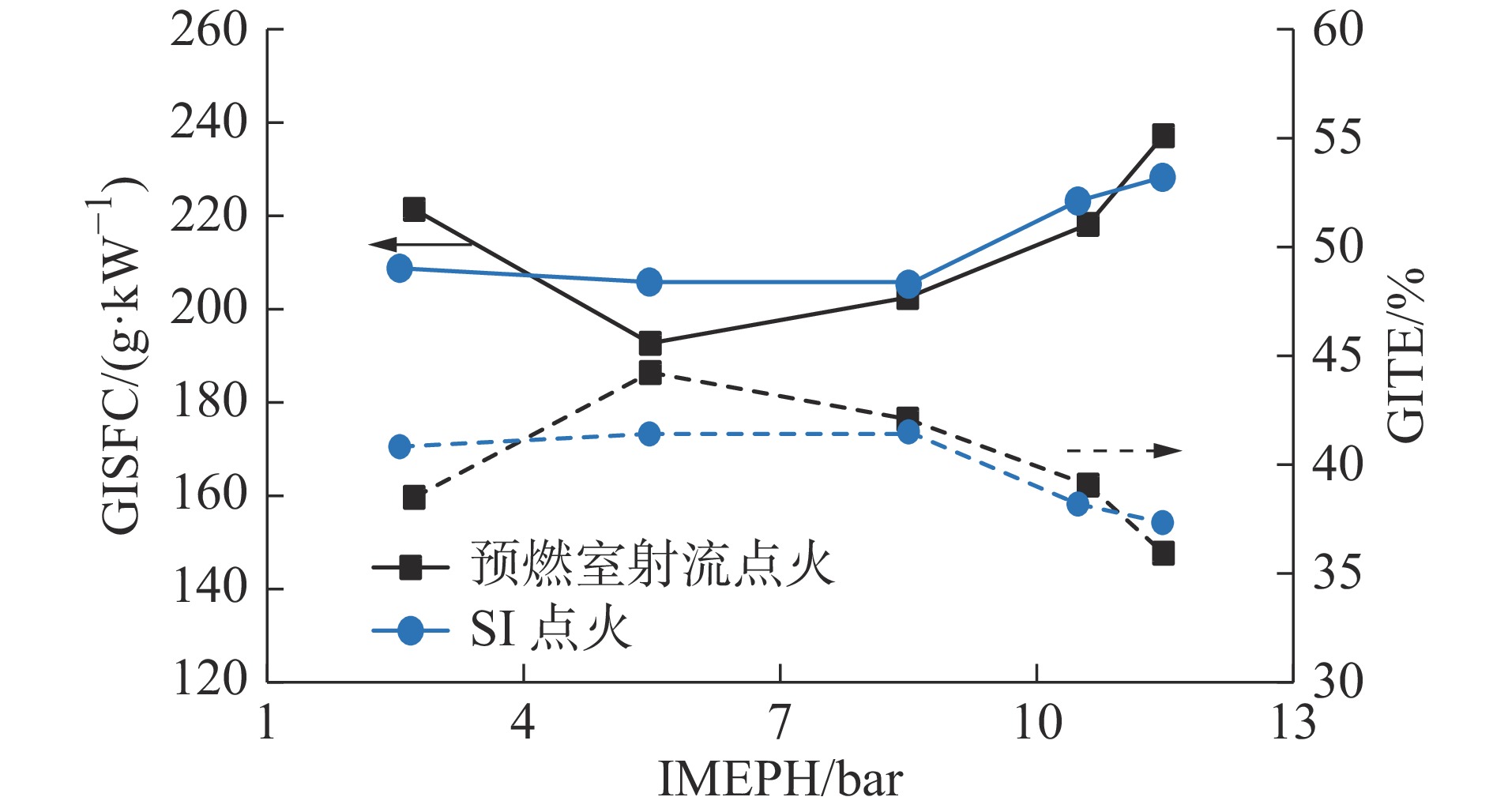
通过试验手段对比分析了预燃室射流点火模式及火花塞点火模式 (SI)对燃烧性能的影响,结果表明:SI点火模式的发动机受高负荷爆震的限制,仅在中等负荷达到最佳的油耗率和热效率。压缩比(CR)的增加仅在中小负荷对油耗率和热效率有改善效果;相比于SI点火模式,预燃室射流点火模式可实现更快的燃烧速度和火焰传播速度,对SI发动机的爆震有较好的抑制效果,在中等负荷具有更低的油耗率和更高的热效率,但在低负荷及高负荷阶段,油耗率和热效率恶化;采用预燃室射流点火模式,能有效增加缸内燃烧速率,减轻CA50推迟对油耗率恶化的效果,通过提高压缩比实现降低油耗率的潜力和效果更好。
通过试验手段对比分析了预燃室射流点火模式及火花塞点火模式 (SI)对燃烧性能的影响,结果表明:SI点火模式的发动机受高负荷爆震的限制,仅在中等负荷达到最佳的油耗率和热效率。压缩比(CR)的增加仅在中小负荷对油耗率和热效率有改善效果;相比于SI点火模式,预燃室射流点火模式可实现更快的燃烧速度和火焰传播速度,对SI发动机的爆震有较好的抑制效果,在中等负荷具有更低的油耗率和更高的热效率,但在低负荷及高负荷阶段,油耗率和热效率恶化;采用预燃室射流点火模式,能有效增加缸内燃烧速率,减轻CA50推迟对油耗率恶化的效果,通过提高压缩比实现降低油耗率的潜力和效果更好。






2022, 41(12): 1907-1913.
doi: 10.13433/j.cnki.1003-8728.20200546
摘要:
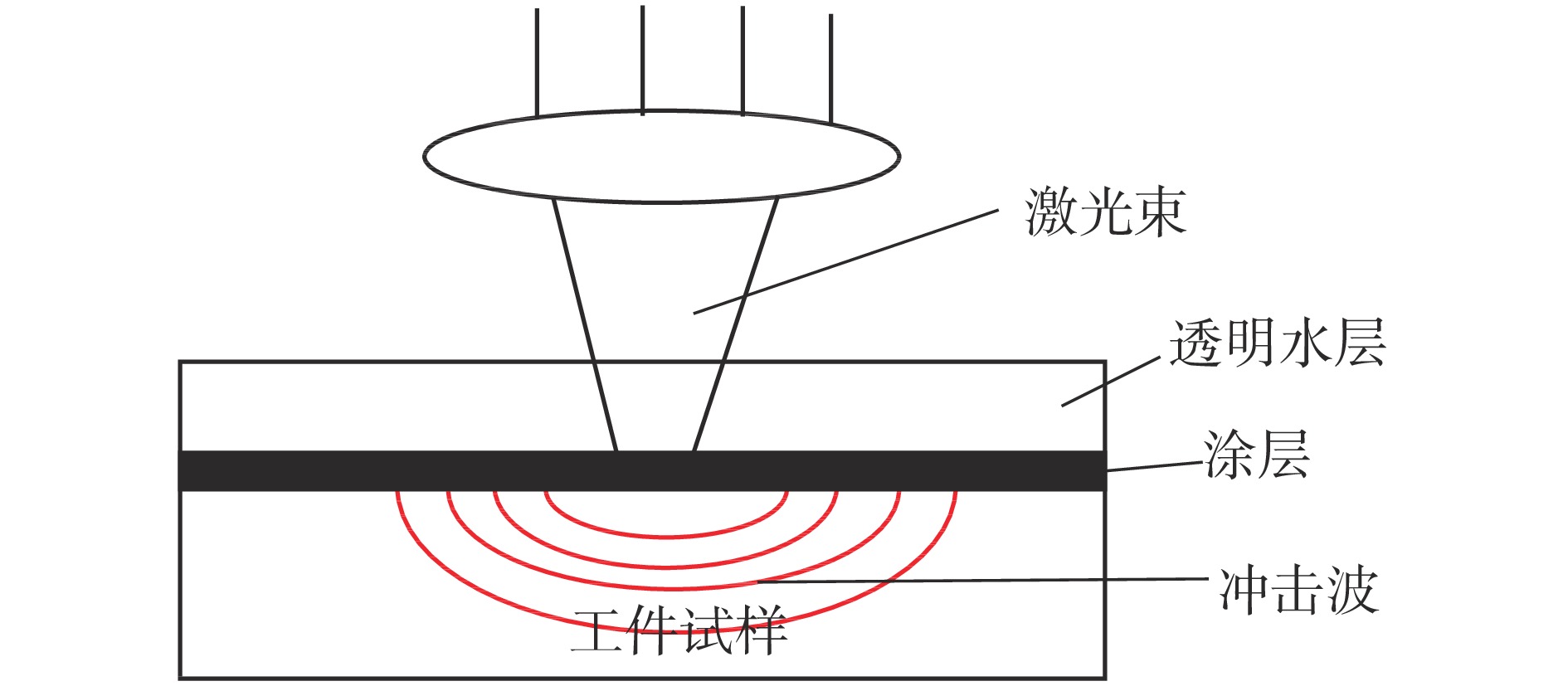
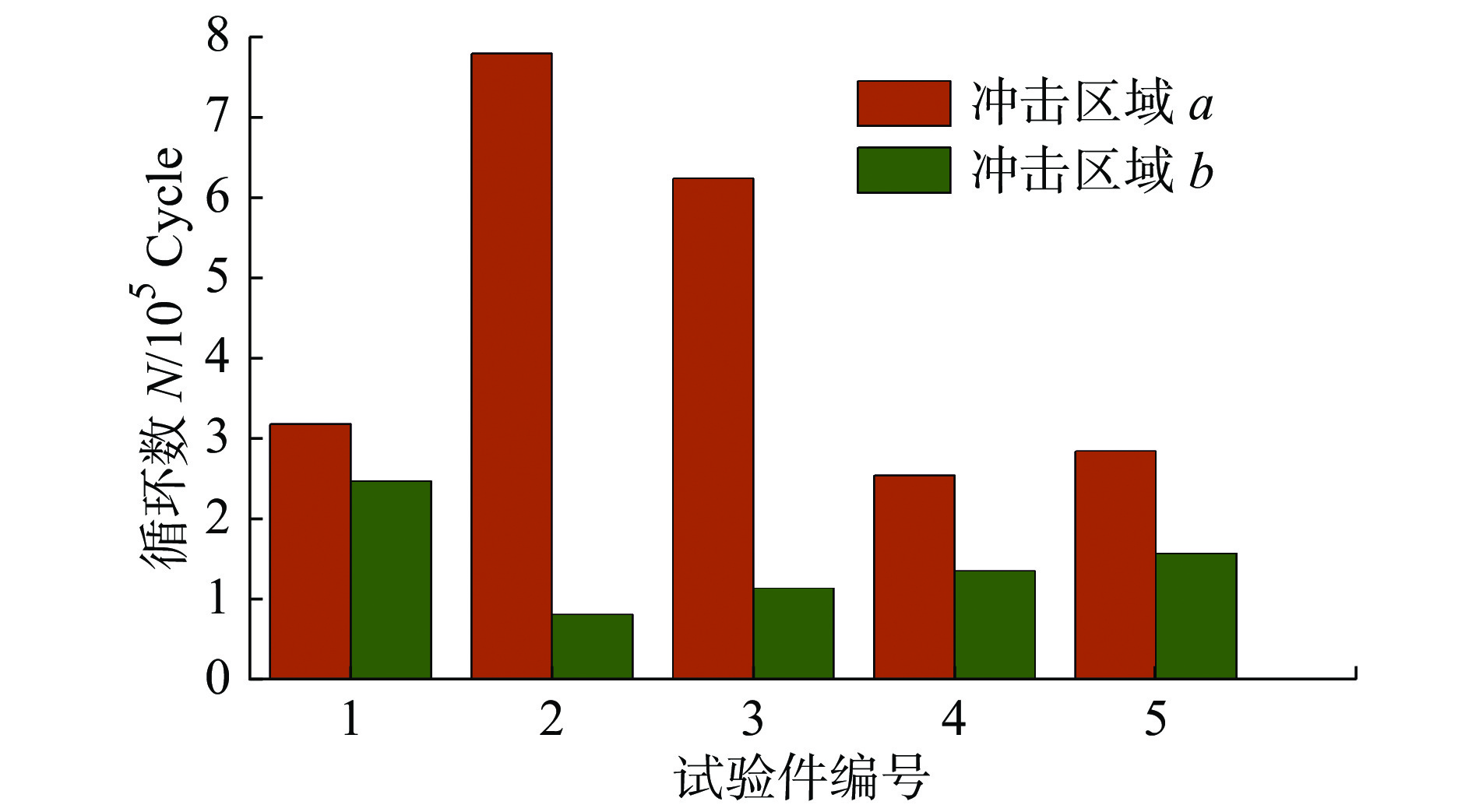
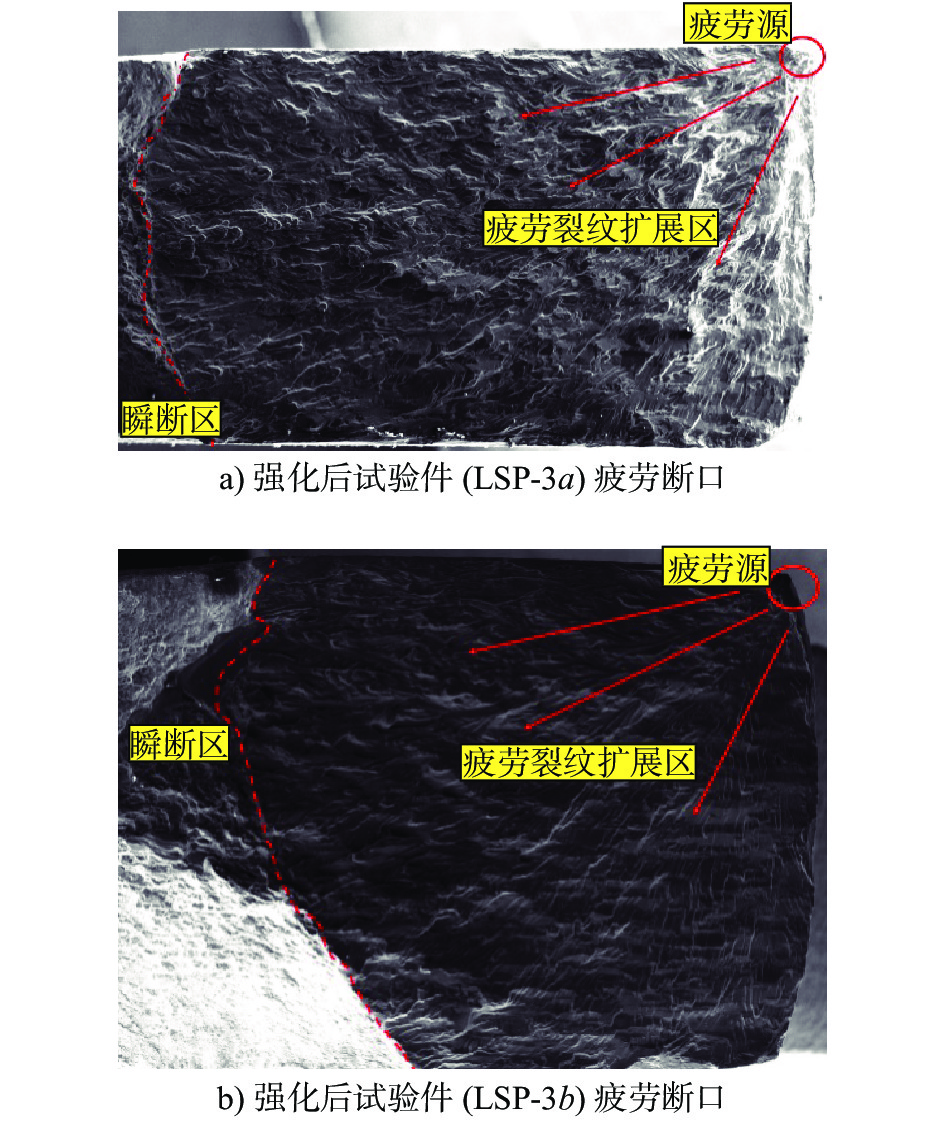
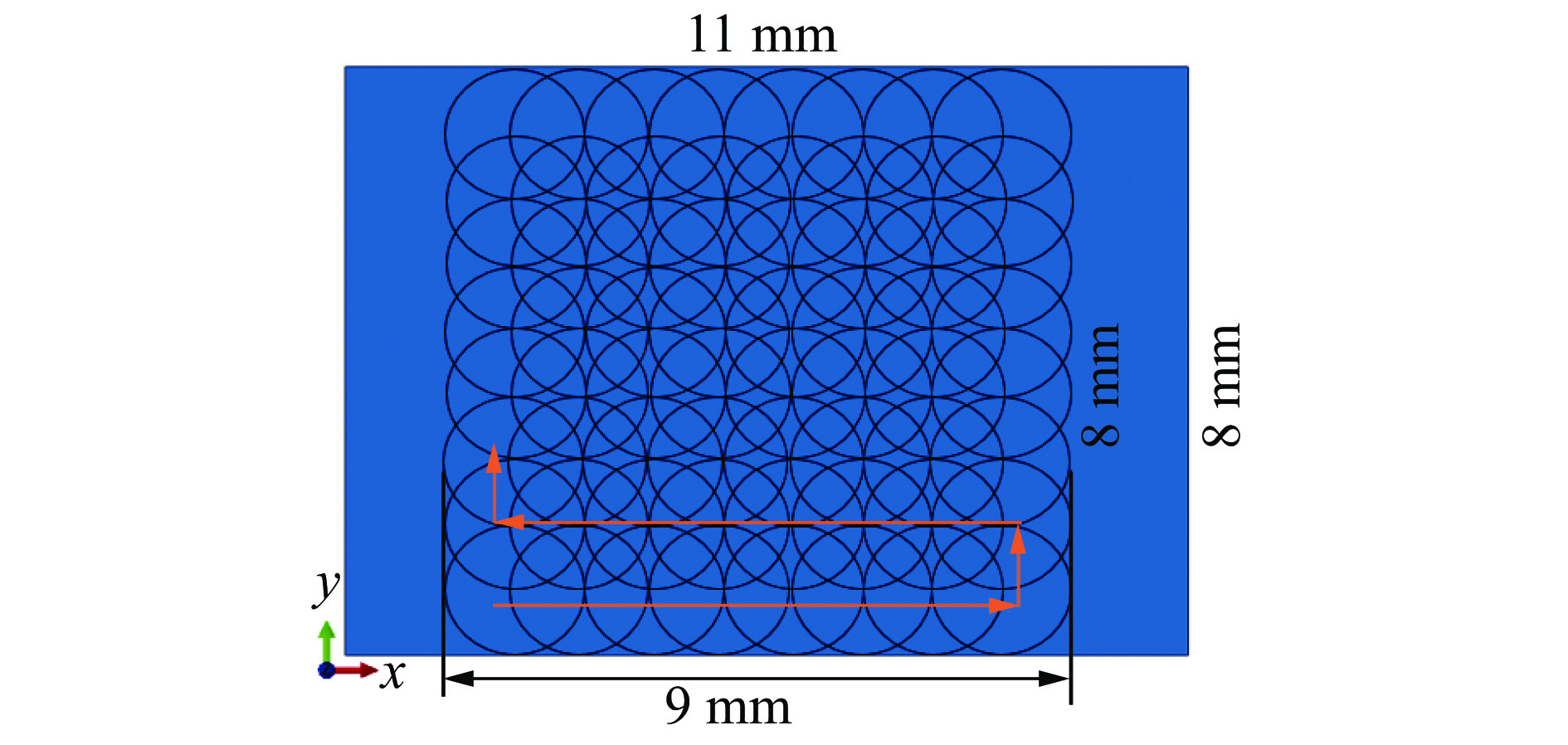
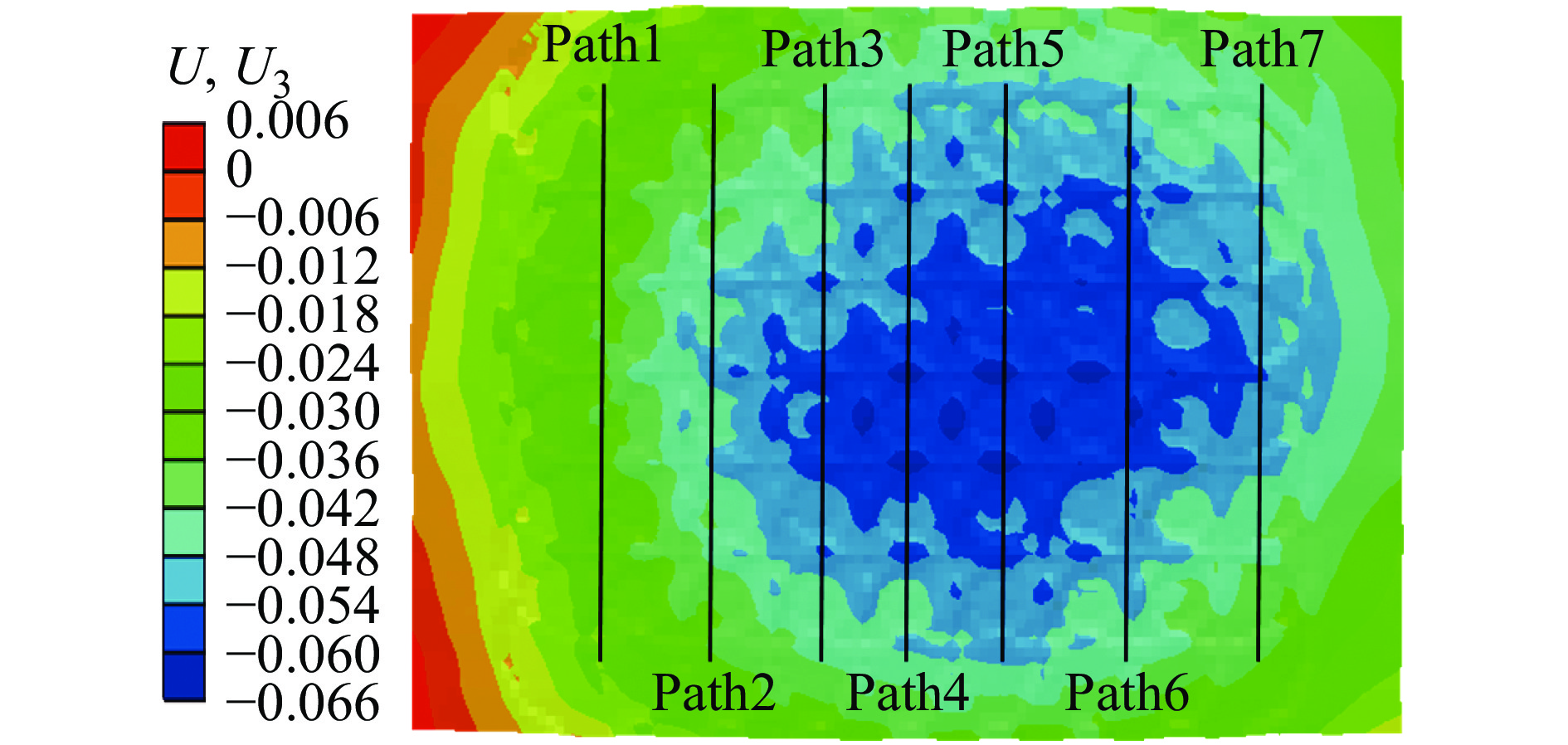
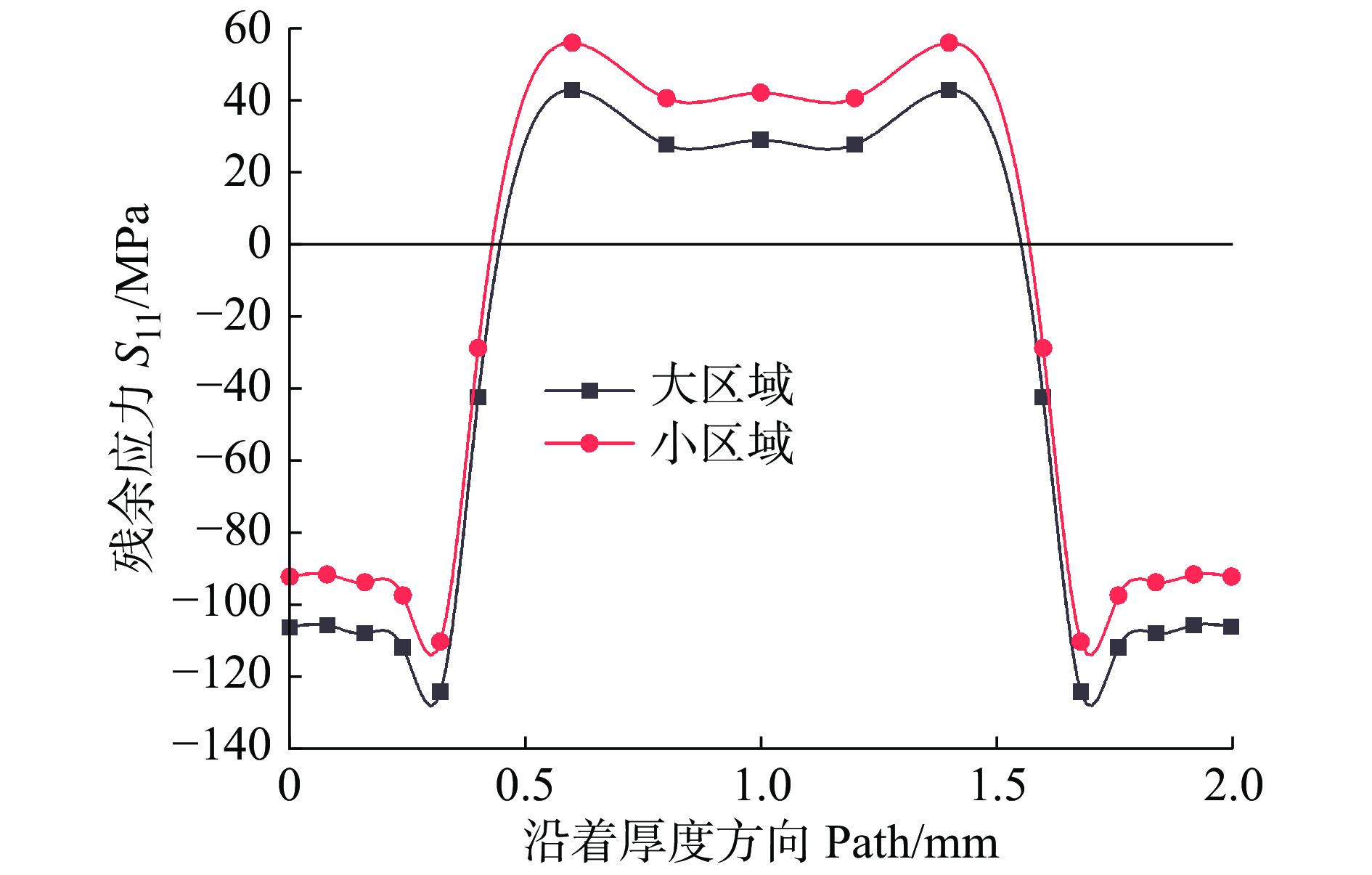
为了探究不同激光冲击区域对铝合金板材缺口的疲劳性能的影响,对7075-T651合金板材结构的缺口的不同区域进行了激光冲击处理。第1种方法仅针对板材的缺口边缘进行激光冲击;第2种方法是在板材缺口的一定范围内进行激光冲击。结果表明:采用第1种激光冲击方法,板材表面粗糙度更小,且板材的特征疲劳寿命是第2种激光冲击方法的3.23倍。通过对激光冲击的板材进行有限元仿真分析,揭示了激光冲击强化对板材疲劳寿命影响的原因。只有设置合理的激光冲击参数与冲击区域才能有效地改善疲劳性能,提升结构的疲劳寿命,不合理的冲击处理方式反而会降低结构的疲劳寿命。
为了探究不同激光冲击区域对铝合金板材缺口的疲劳性能的影响,对7075-T651合金板材结构的缺口的不同区域进行了激光冲击处理。第1种方法仅针对板材的缺口边缘进行激光冲击;第2种方法是在板材缺口的一定范围内进行激光冲击。结果表明:采用第1种激光冲击方法,板材表面粗糙度更小,且板材的特征疲劳寿命是第2种激光冲击方法的3.23倍。通过对激光冲击的板材进行有限元仿真分析,揭示了激光冲击强化对板材疲劳寿命影响的原因。只有设置合理的激光冲击参数与冲击区域才能有效地改善疲劳性能,提升结构的疲劳寿命,不合理的冲击处理方式反而会降低结构的疲劳寿命。







2022, 41(12): 1914-1920.
doi: 10.13433/j.cnki.1003-8728.20200540
摘要:
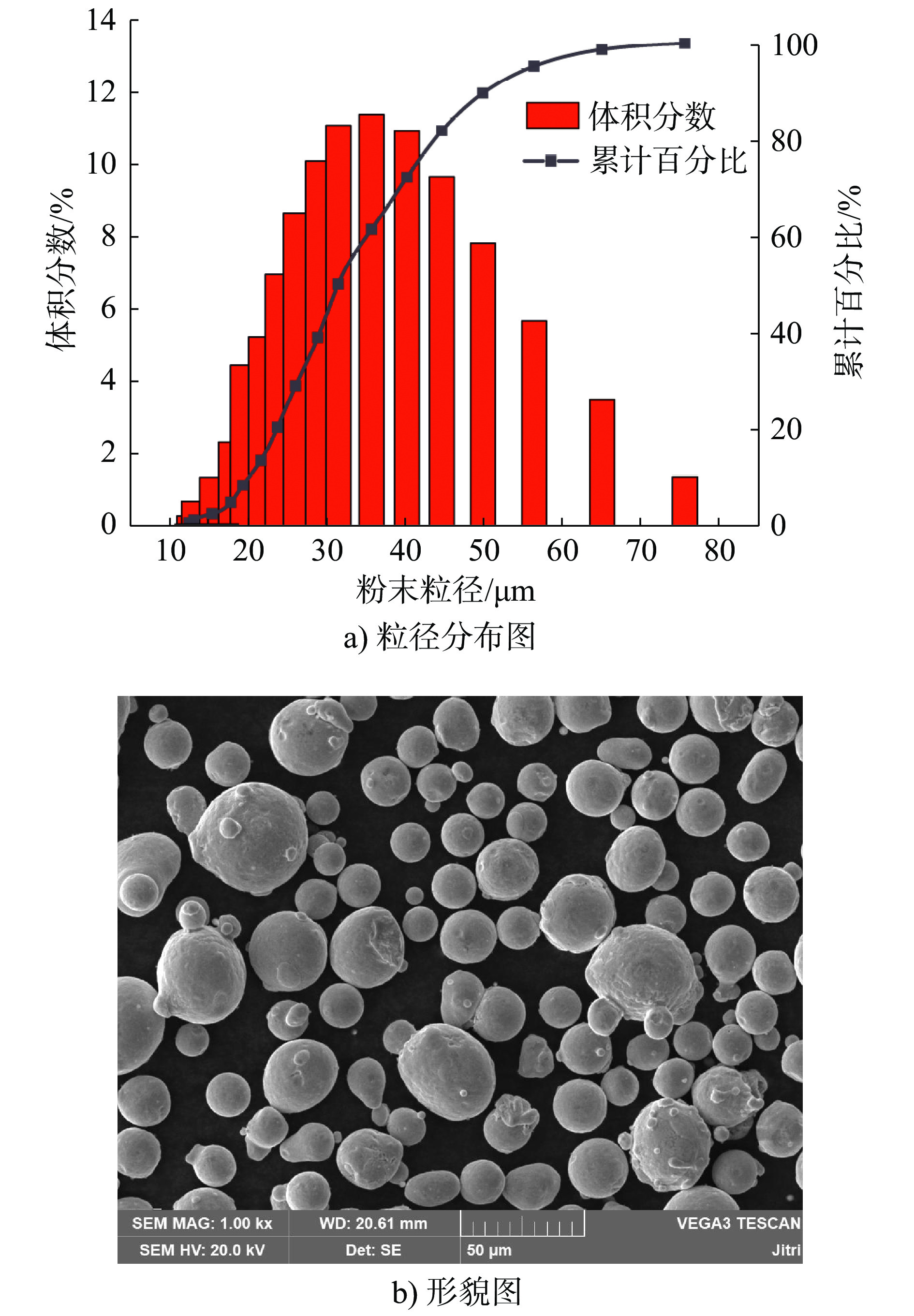
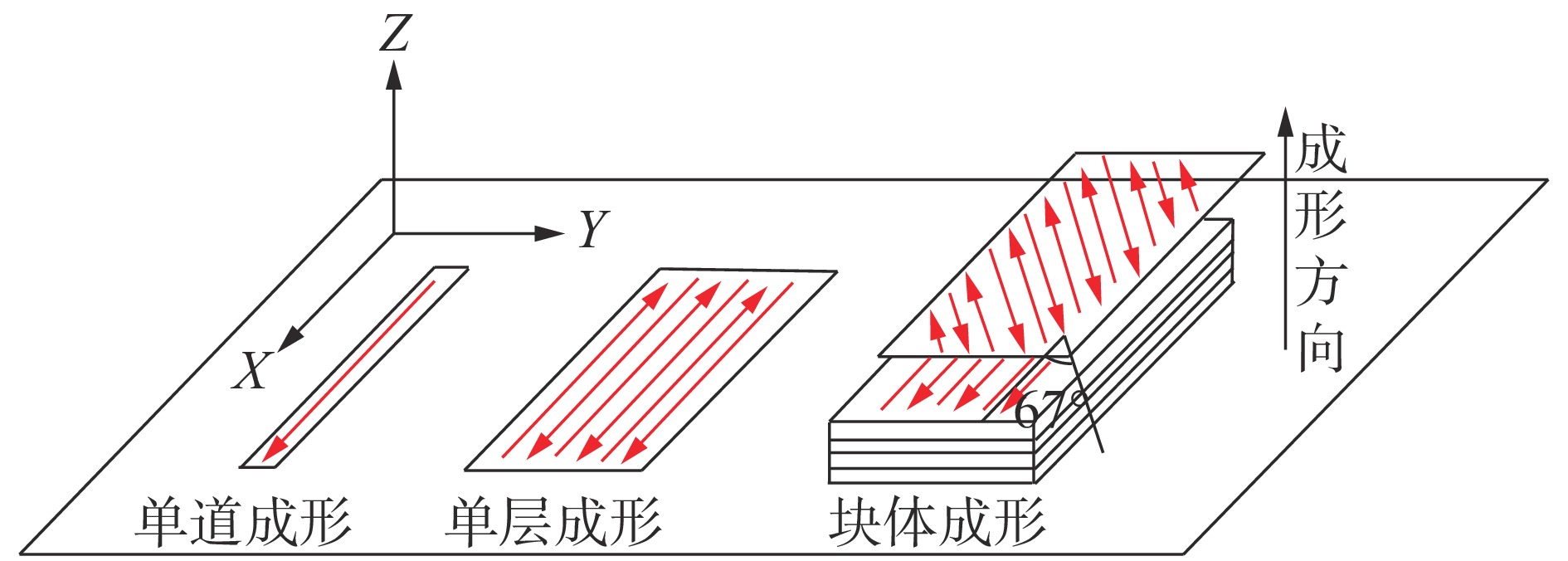
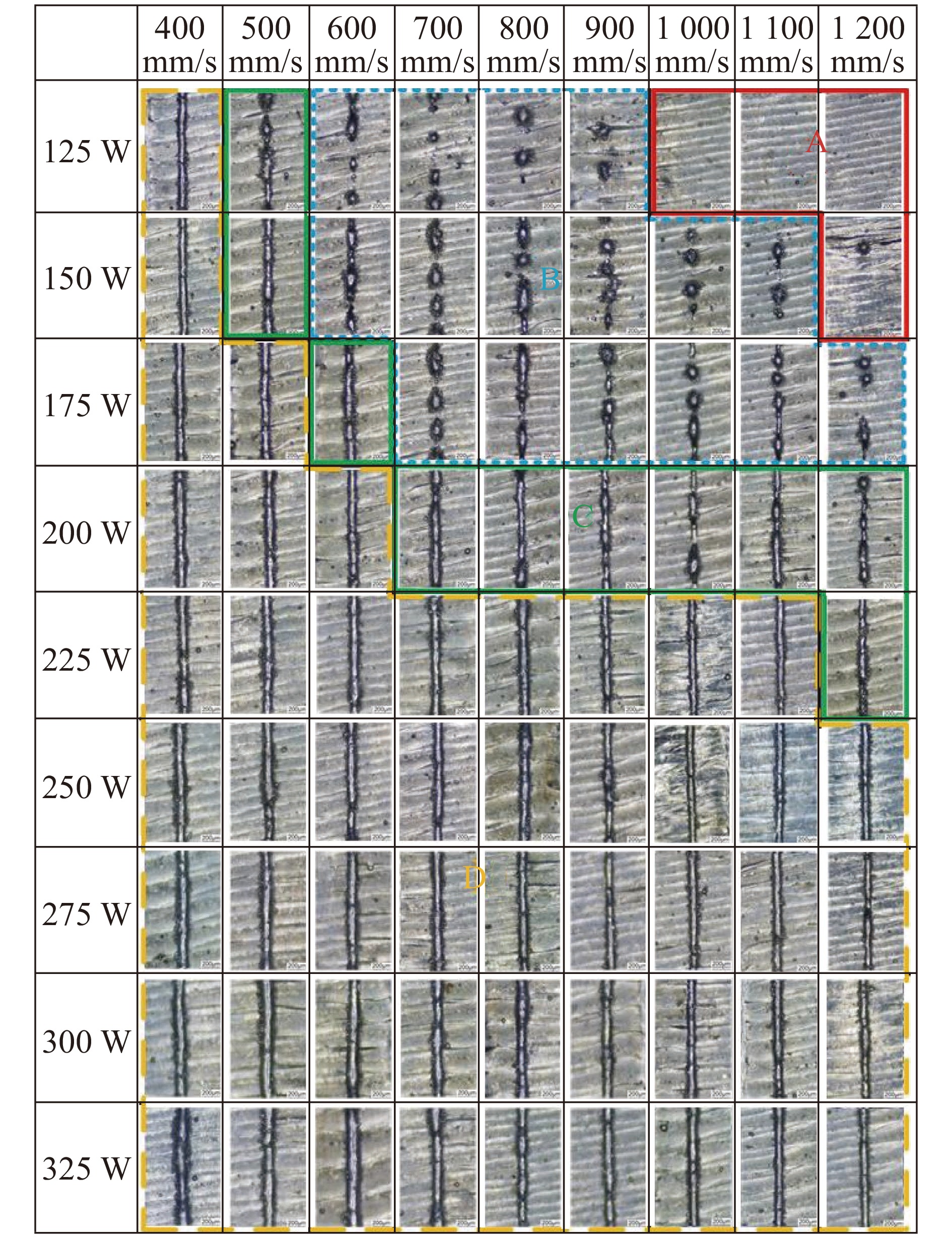
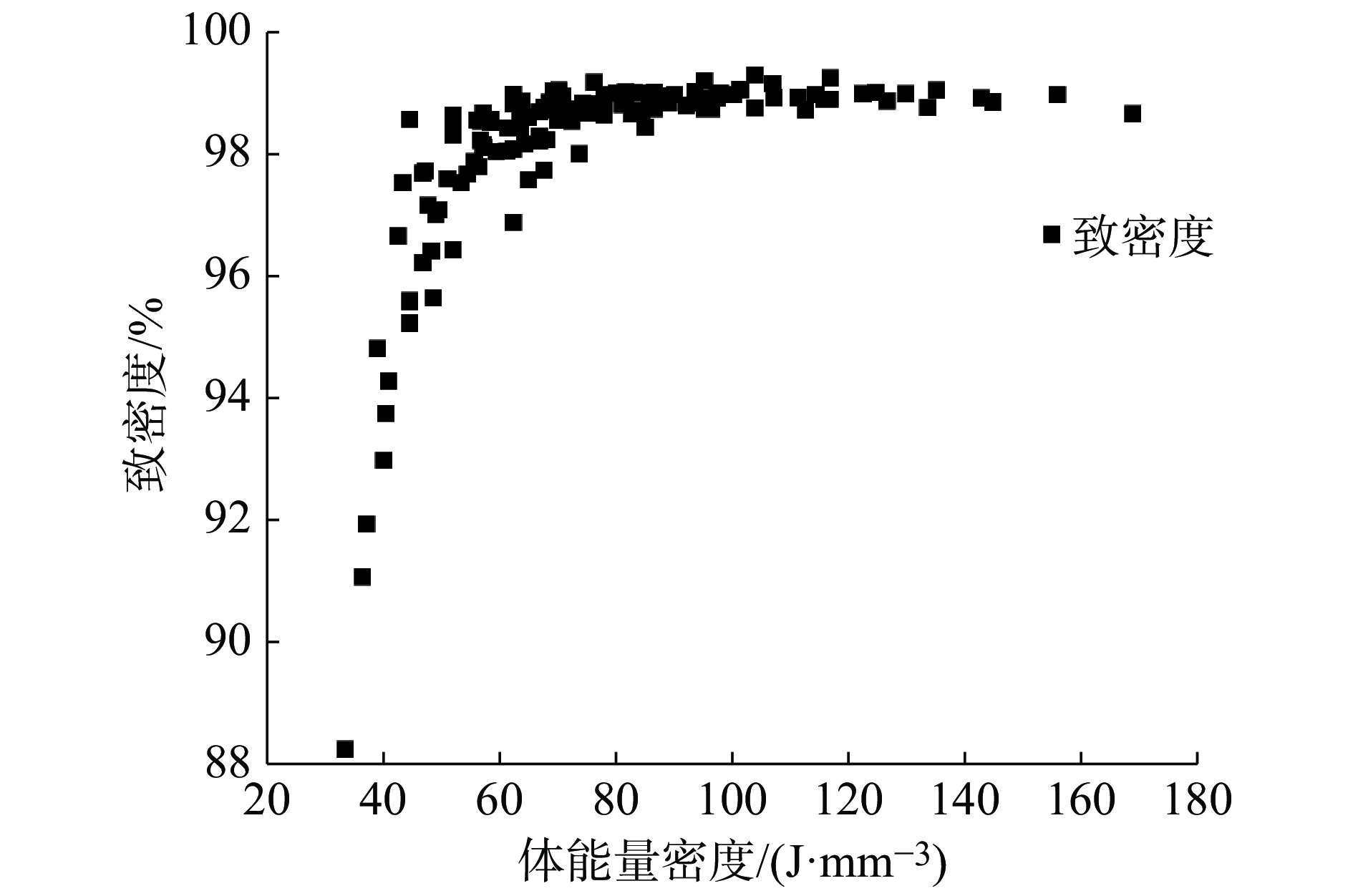
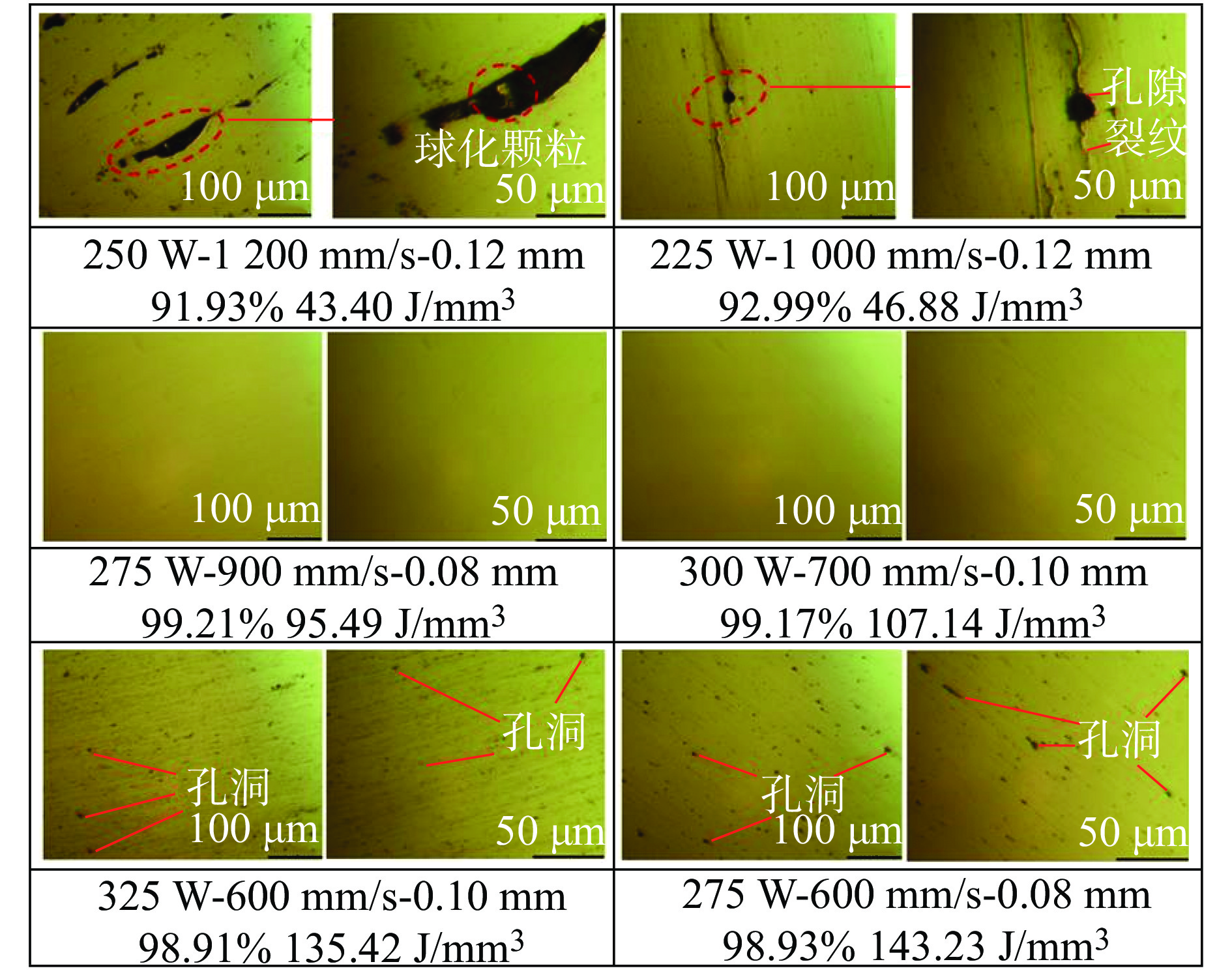
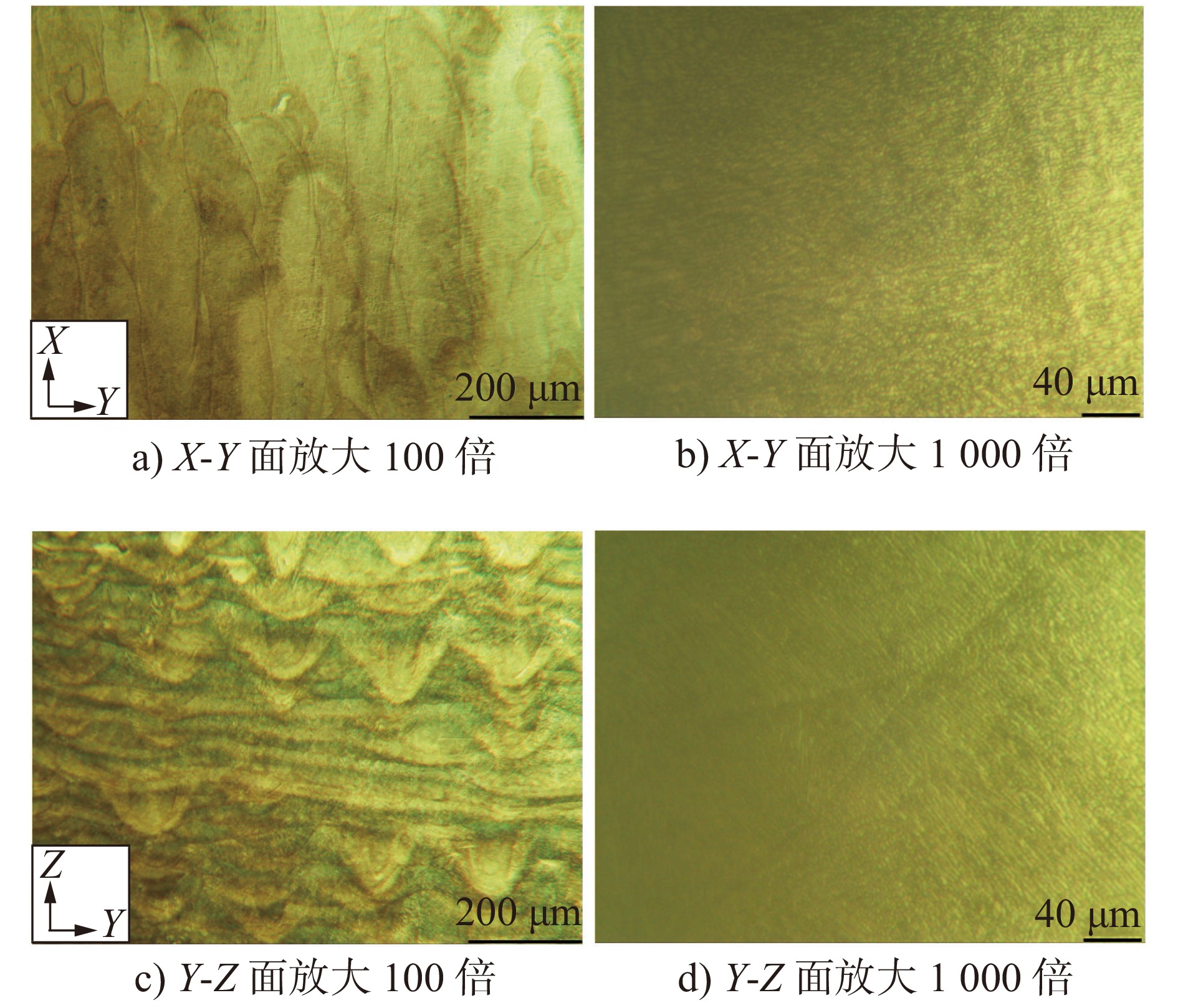
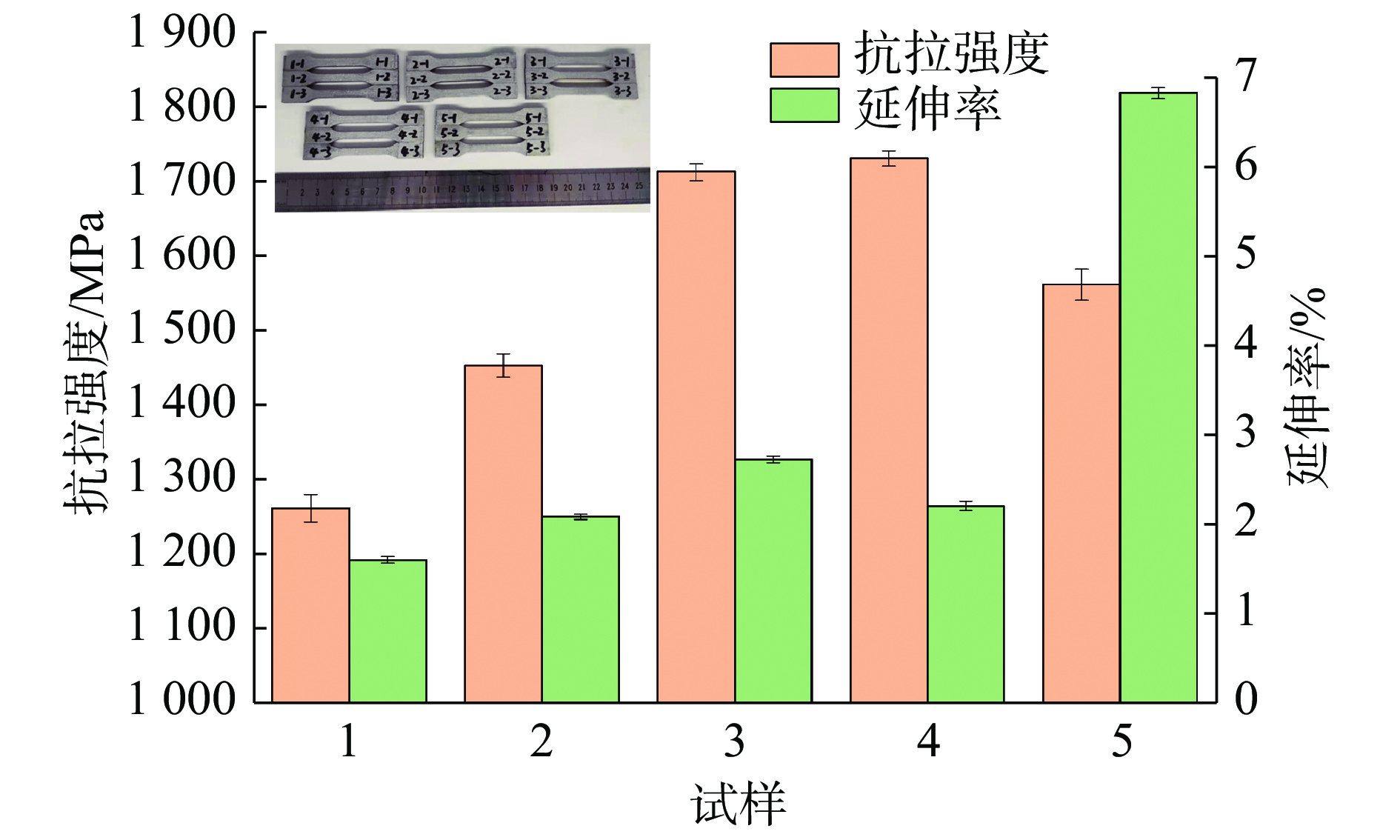
通过实验方法优化得到了粉末床激光熔化成形H13钢的工艺参数,并研究了成形样件的微观组织和拉伸性能。通过实验得到了H13钢单道成形的优化工艺区间:激光功率225 ~ 325 W,扫描速度600 ~1200 mm/s,通过块体实验得到优化的工艺参数为:激光功率275 W,扫描速度900 mm/s,扫描间距0.08 mm。微观组织显示为柱状晶粒,晶粒的宽度约为3 ~ 5 μm,长度约为10 ~ 40 μm。在优化工艺参数下成形试样的室温抗拉强度高达1 761 MPa,延伸率为2.72%。
通过实验方法优化得到了粉末床激光熔化成形H13钢的工艺参数,并研究了成形样件的微观组织和拉伸性能。通过实验得到了H13钢单道成形的优化工艺区间:激光功率225 ~ 325 W,扫描速度600 ~1200 mm/s,通过块体实验得到优化的工艺参数为:激光功率275 W,扫描速度900 mm/s,扫描间距0.08 mm。微观组织显示为柱状晶粒,晶粒的宽度约为3 ~ 5 μm,长度约为10 ~ 40 μm。在优化工艺参数下成形试样的室温抗拉强度高达1 761 MPa,延伸率为2.72%。

2022, 41(12): 1921-1927.
doi: 10.13433/j.cnki.1003-8728.20200511
摘要:
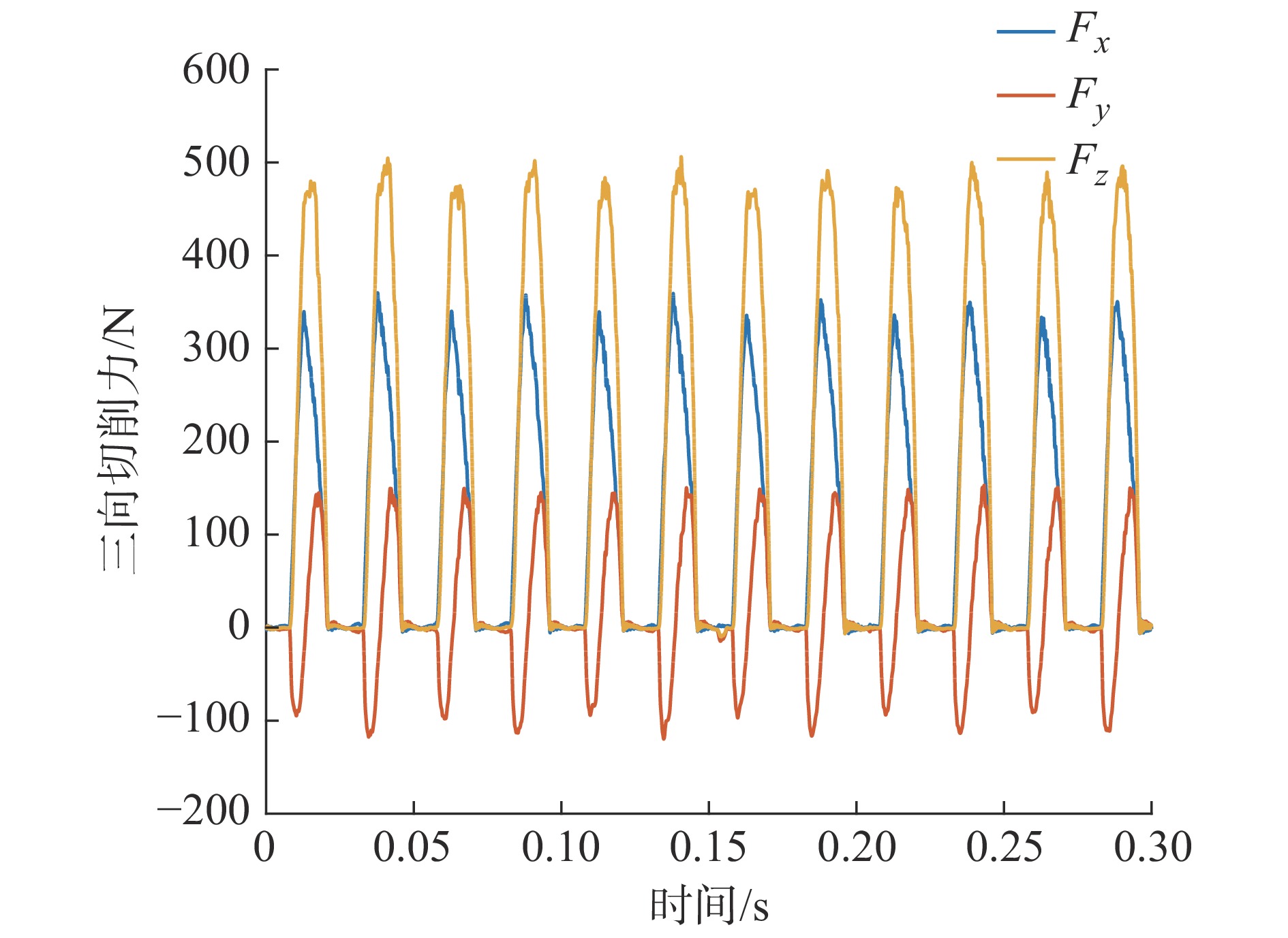
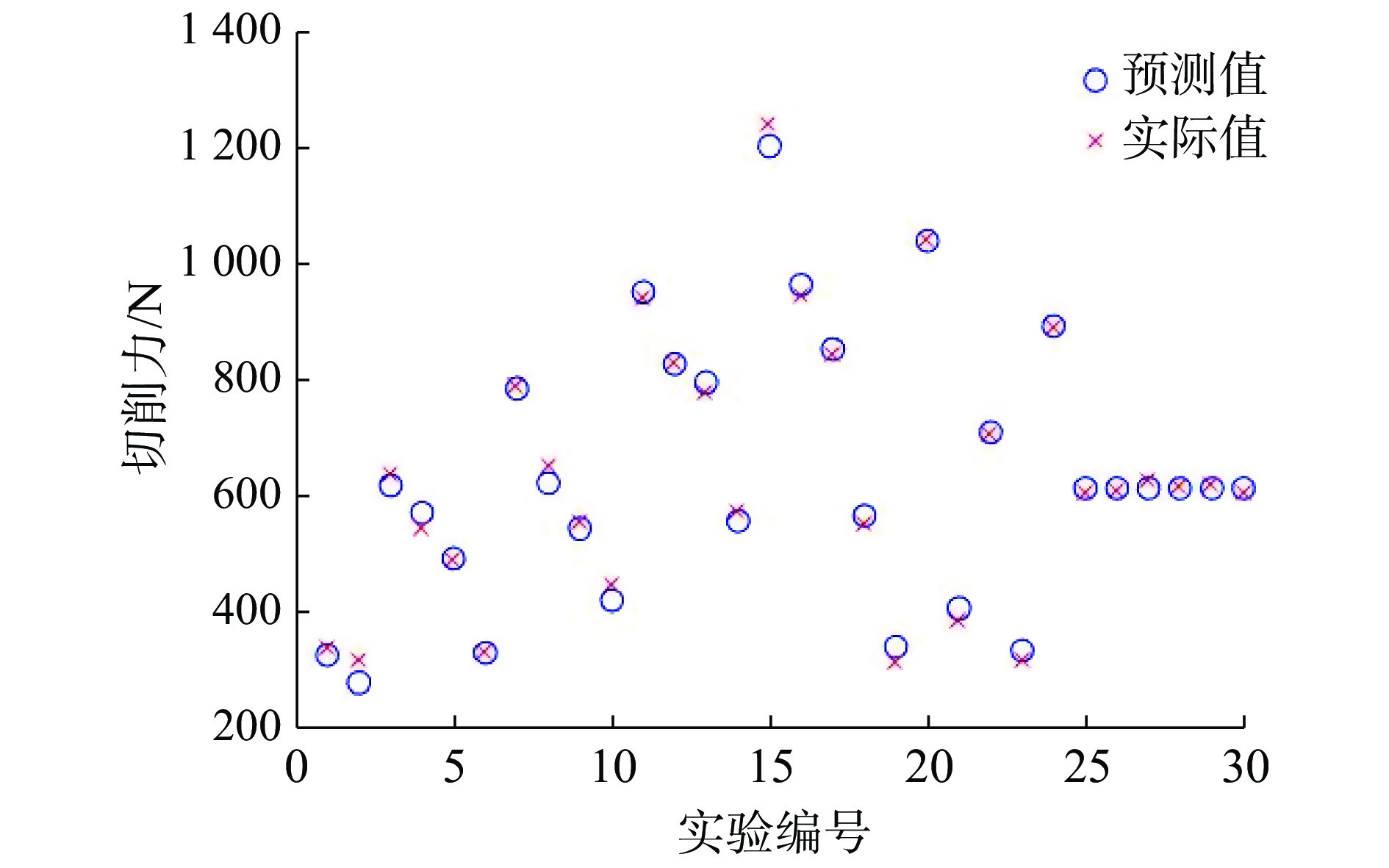
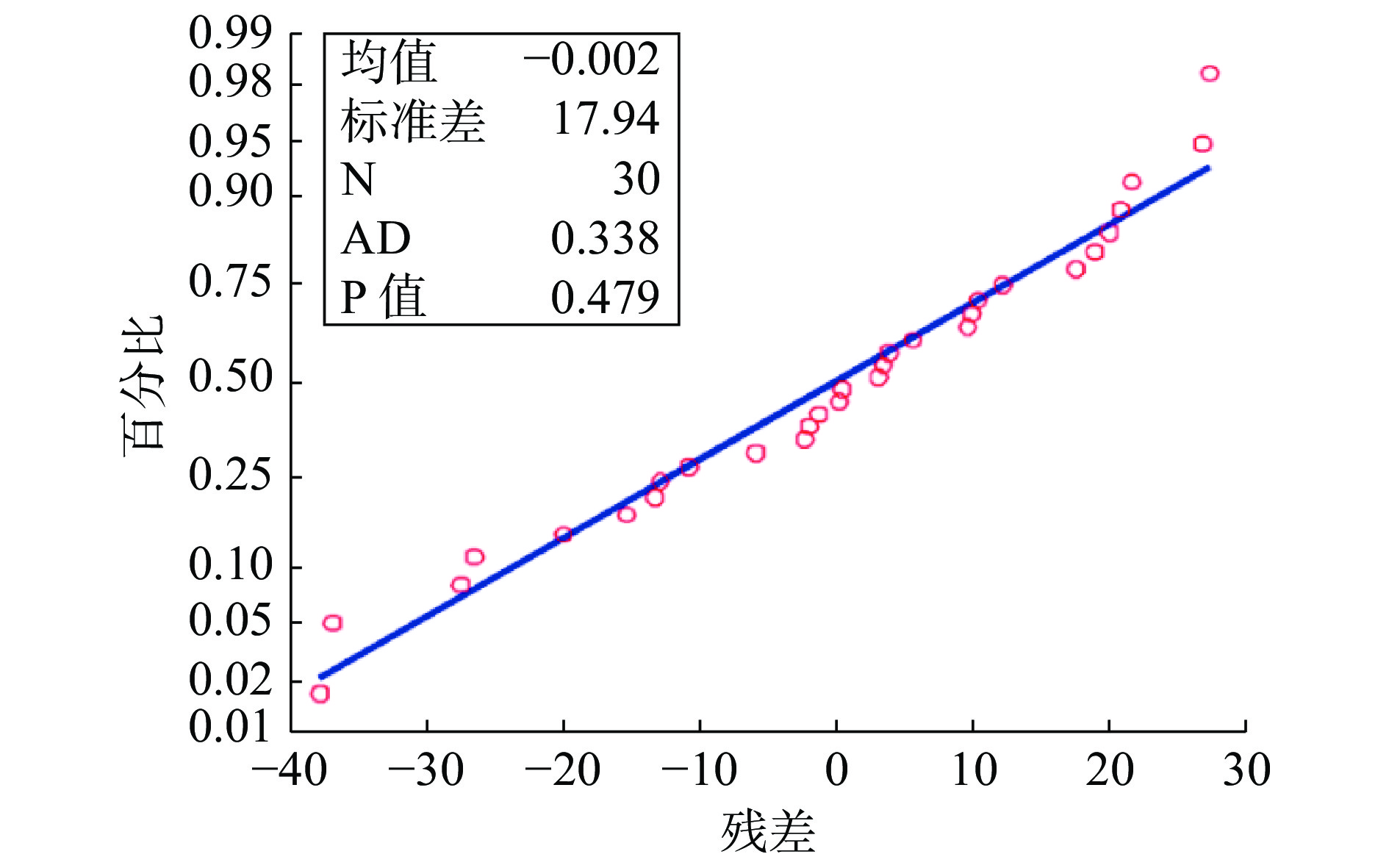
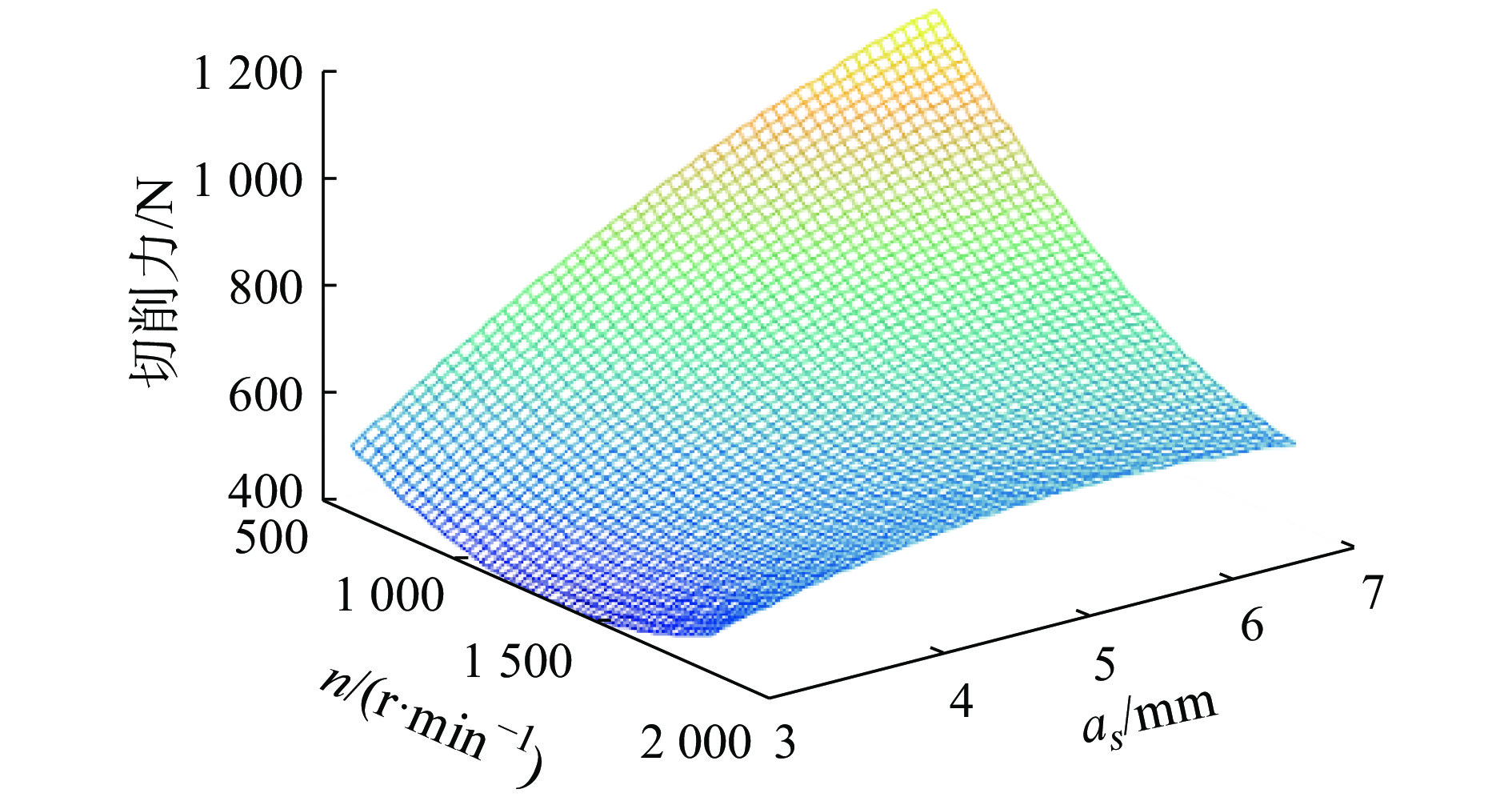
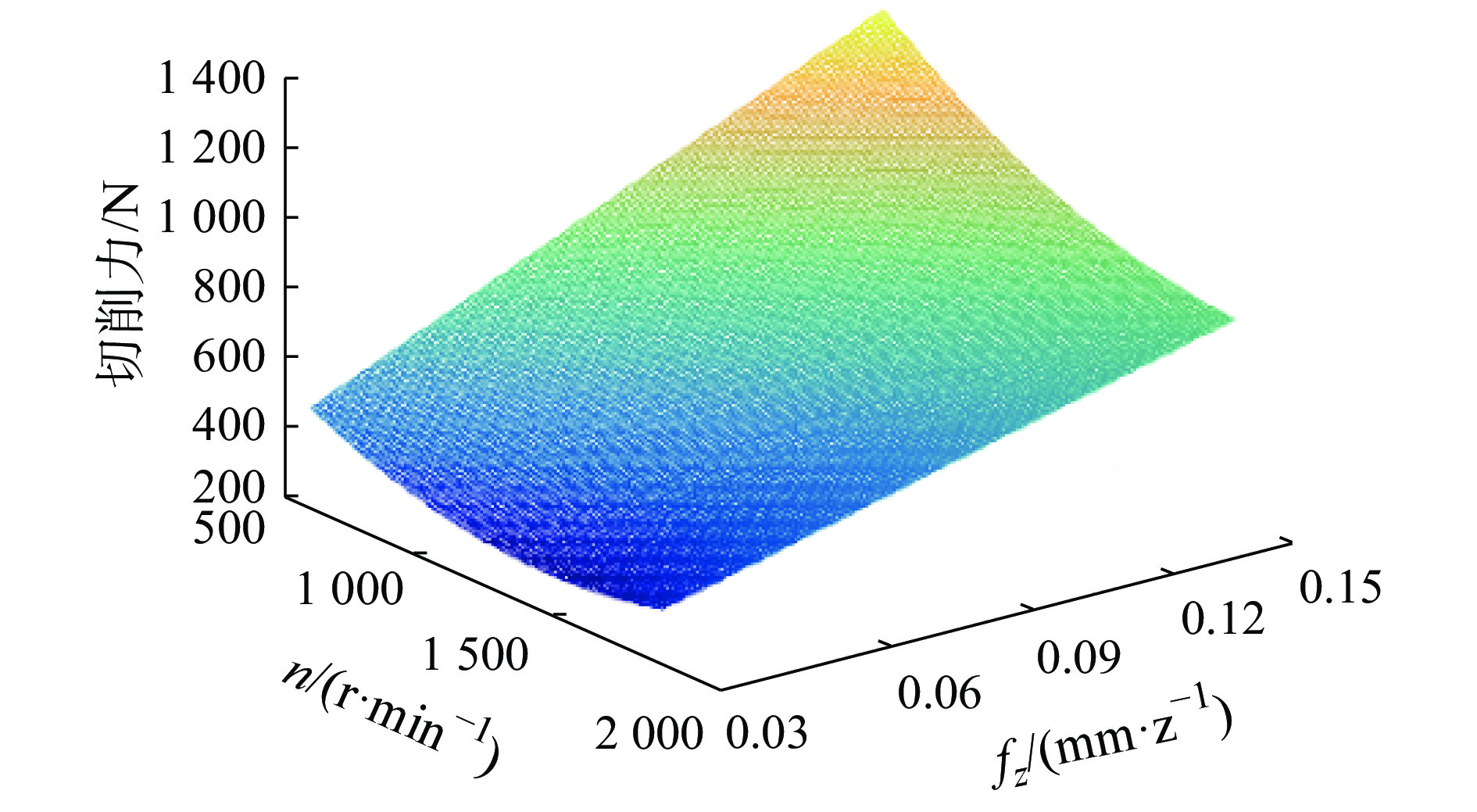
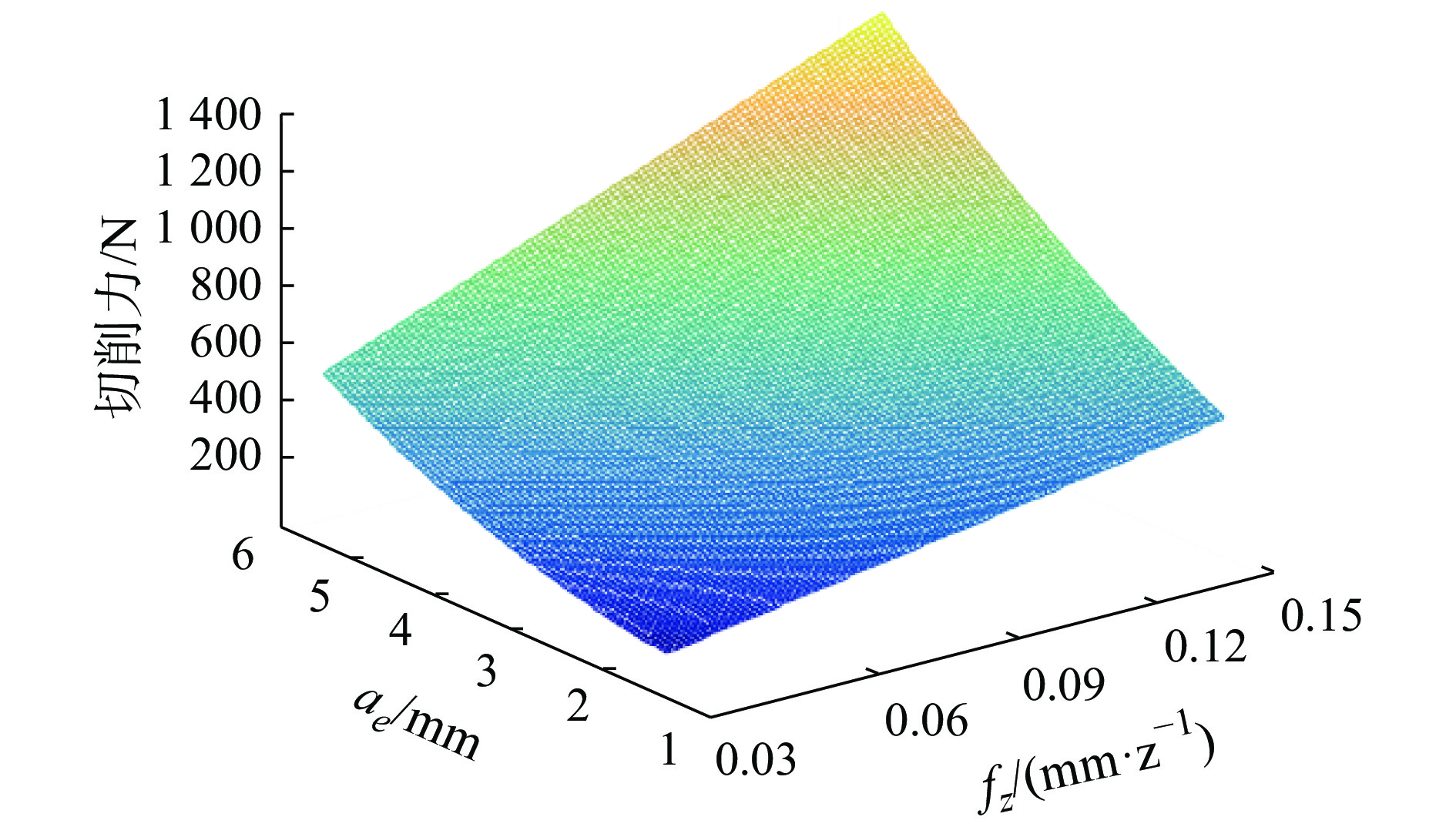
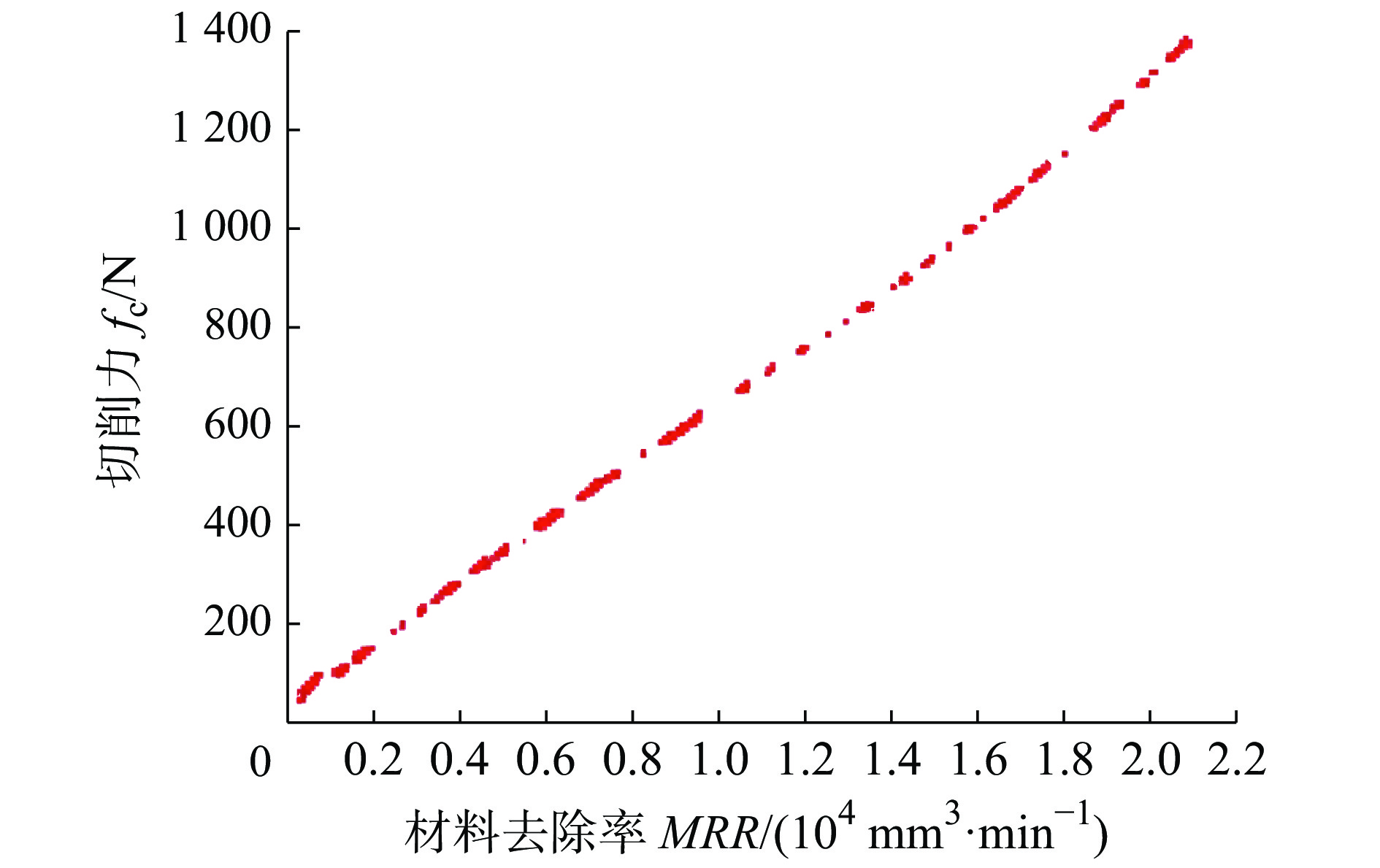
钛合金整体叶盘是航空发动机的重要零部件,结构复杂,加工难度大。插铣加工因其轴向承受能力强和刚性大等特性,非常适合加工钛合金整体叶盘这类难加工、结构复杂的零部件。针对钛合金插铣加工效率的问题,采用响应曲面法设计插铣实验,建立切削力经验模型,以切削力和材料去除率为目标,采用NSGA-II算法进行多目标优化获得Pareto最优解。研究表明:切削力随主轴转速的增加而缓慢减小,随切削宽度、切削步距和每齿进给量的上升而增加;与实验初始参数组合相比,优化后的材料去除率提高了81.19%,而切削力减小了23.68%,达到了本研究的高效加工目标。
钛合金整体叶盘是航空发动机的重要零部件,结构复杂,加工难度大。插铣加工因其轴向承受能力强和刚性大等特性,非常适合加工钛合金整体叶盘这类难加工、结构复杂的零部件。针对钛合金插铣加工效率的问题,采用响应曲面法设计插铣实验,建立切削力经验模型,以切削力和材料去除率为目标,采用NSGA-II算法进行多目标优化获得Pareto最优解。研究表明:切削力随主轴转速的增加而缓慢减小,随切削宽度、切削步距和每齿进给量的上升而增加;与实验初始参数组合相比,优化后的材料去除率提高了81.19%,而切削力减小了23.68%,达到了本研究的高效加工目标。


2022, 41(12): 1928-1935.
doi: 10.13433/j.cnki.1003-8728.20200534
摘要:
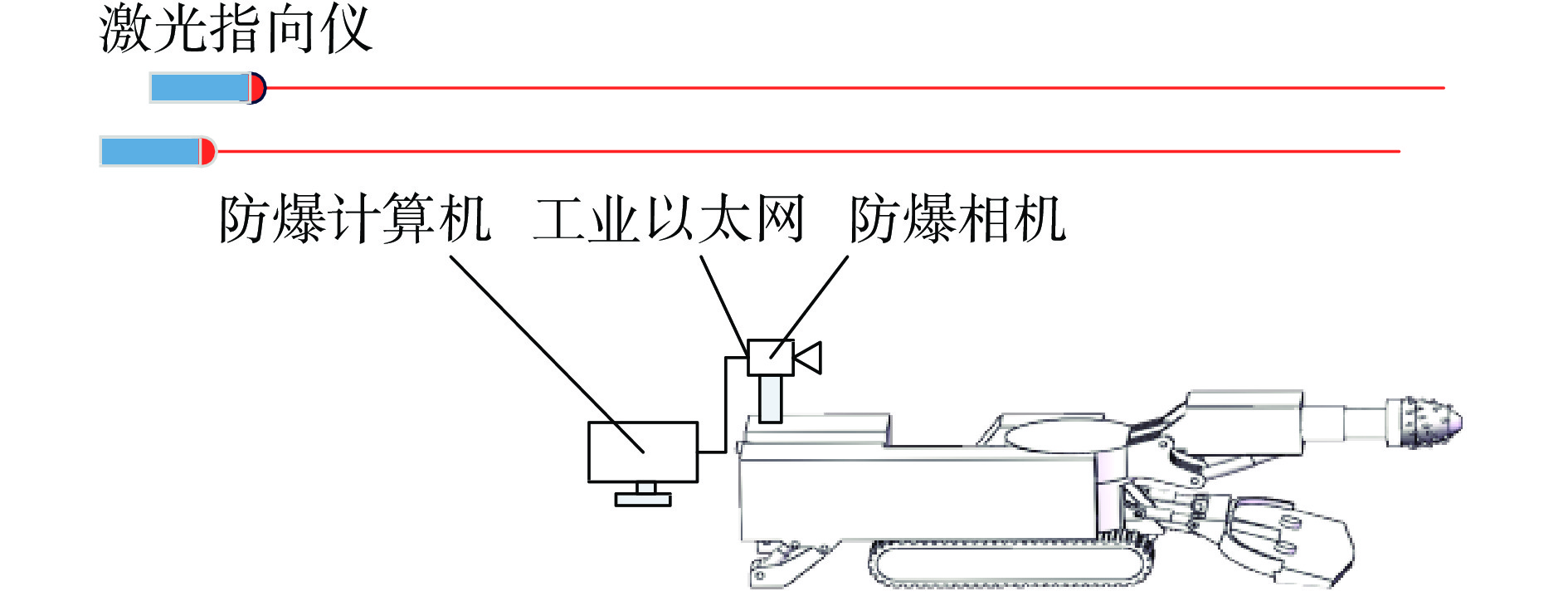
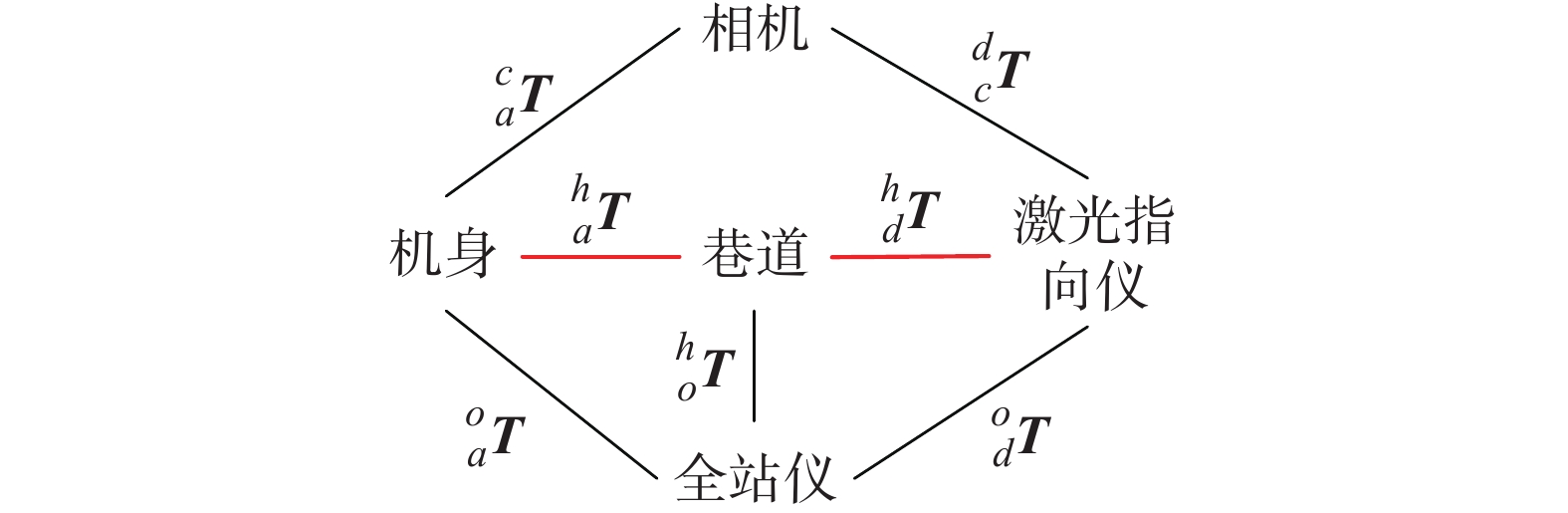
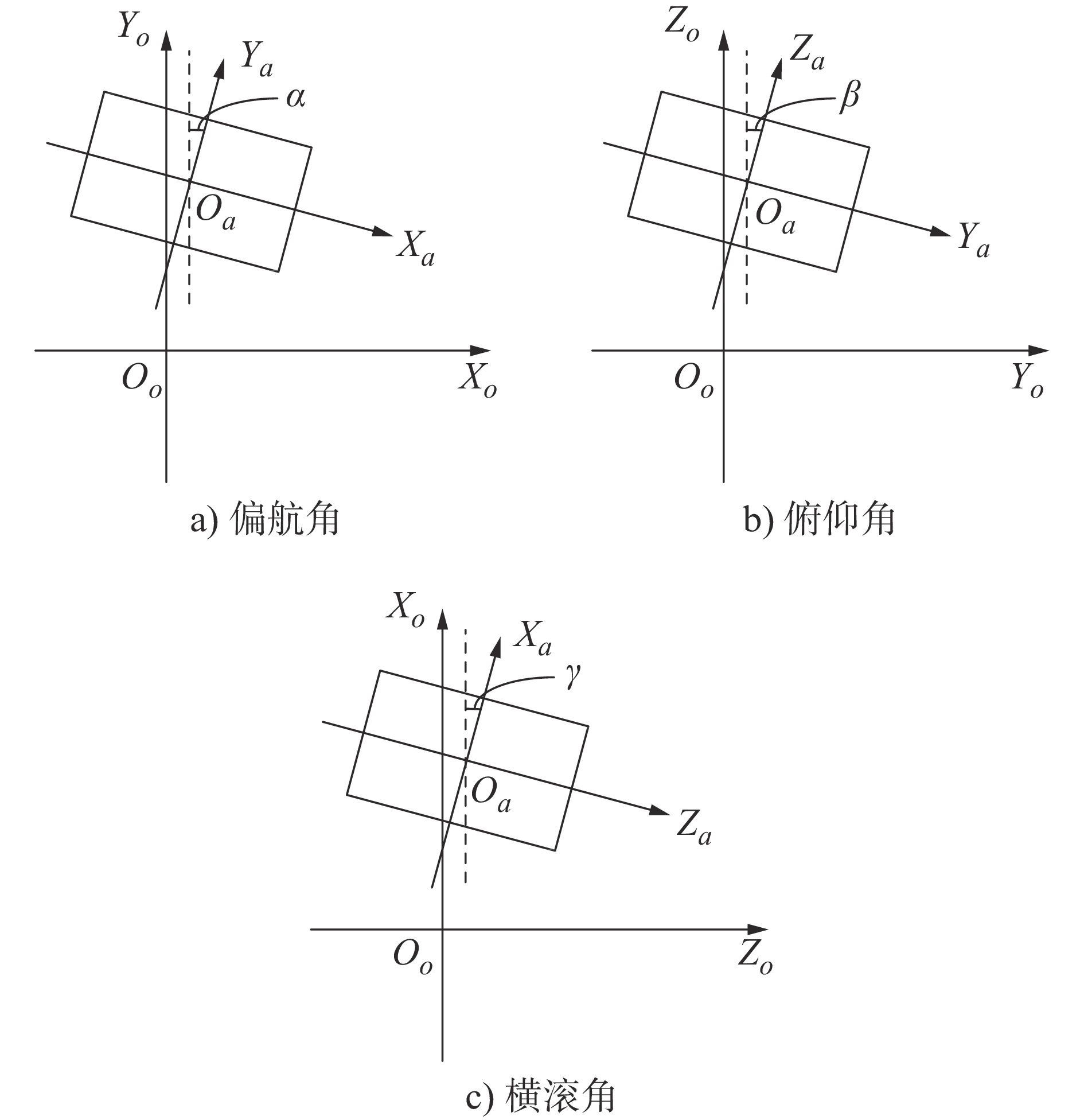
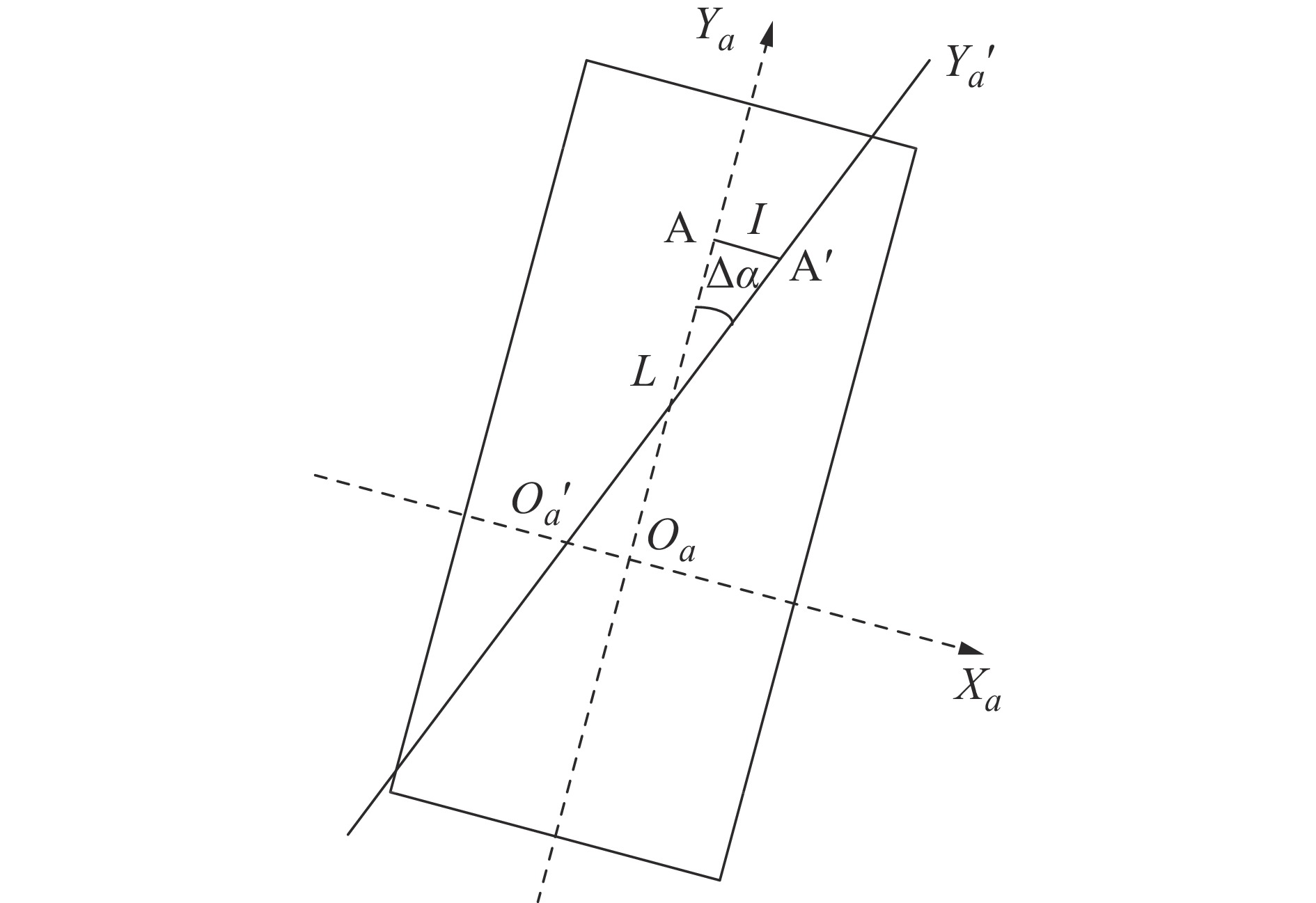
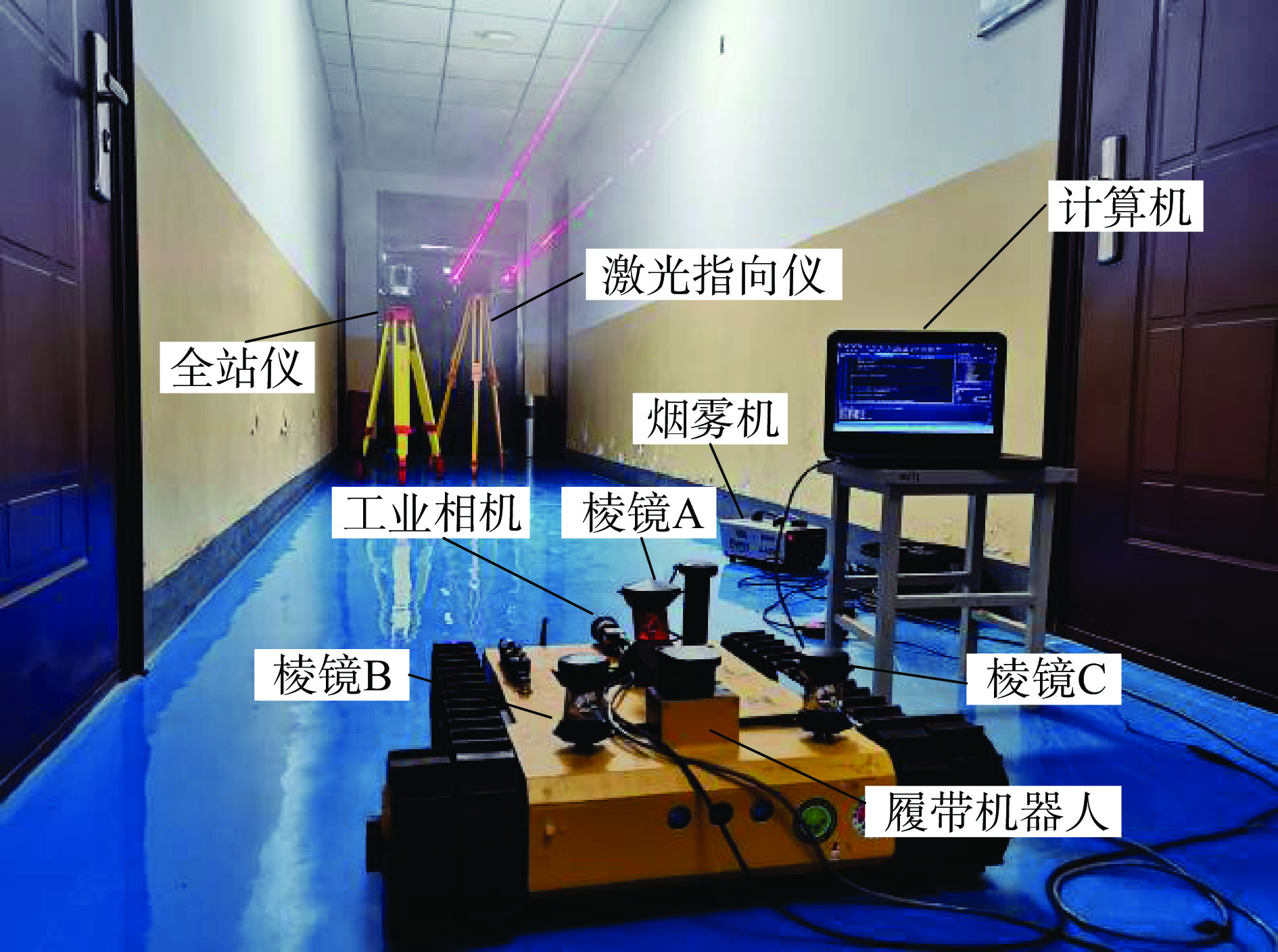
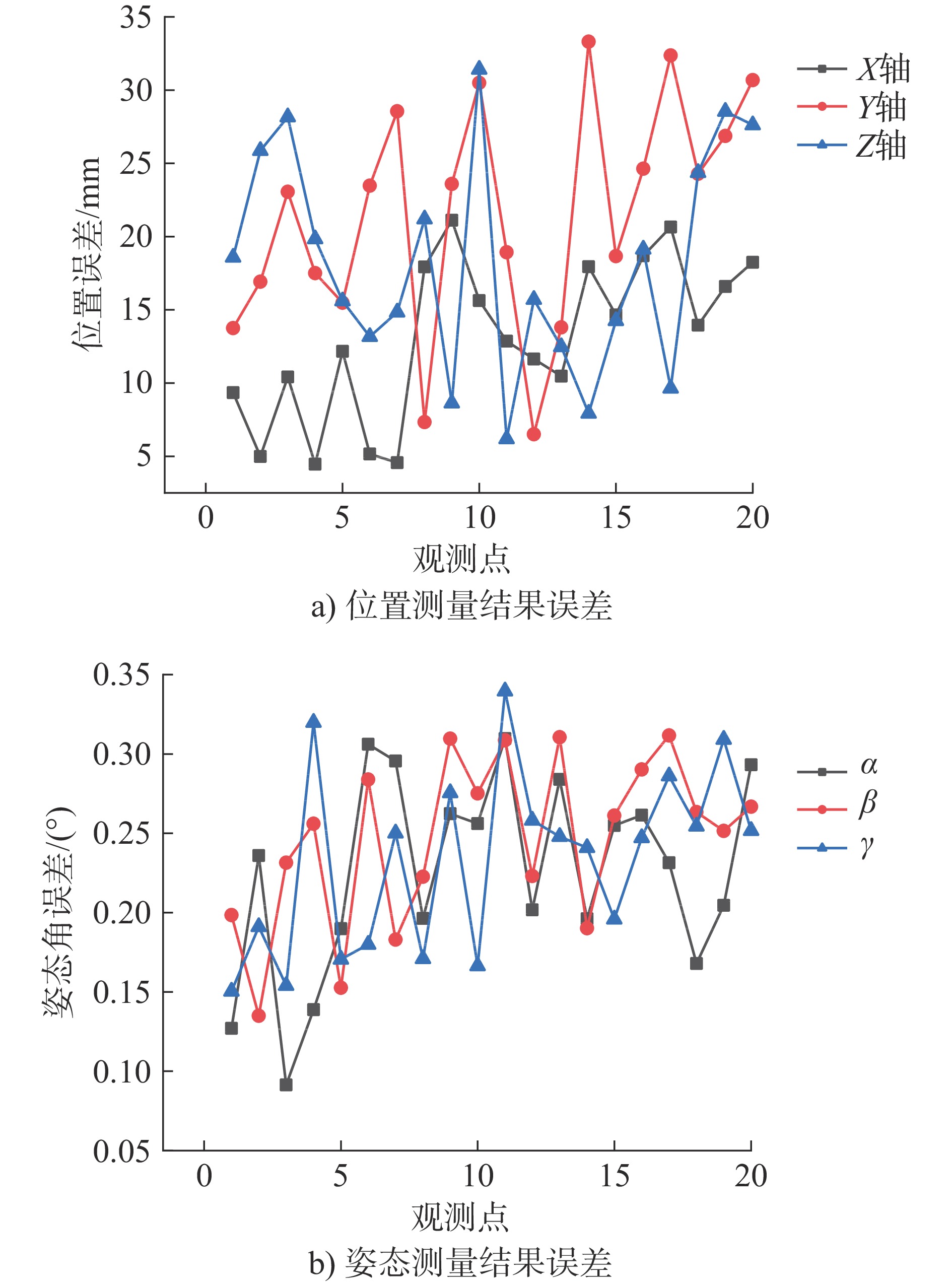
当前巷道掘进过程中高粉尘、低照度等因素严重影响外参标定精度。针对以平行激光线为特征的悬臂式掘进机位姿检测系统外参标定难题,提出一种基于数字全站仪的系统外参标定方法,详细分析系统外参标定误差对测量系统的影响。通过建立视觉位姿测量系统中各模块之间的坐标转换关系,对系统外参标定原理进行数学建模,利用全站仪位姿检测方法得到全站仪系统外参标定结果下机身相对于巷道的位姿,对普通外参标定结果得到的机身相对于巷道位姿进行精度评价。实验结果表明:悬臂式掘进机全站仪系统外参标定方法位置测量误差在 ± 3 mm内,姿态角角度测量误差在0.08°内;利用全站仪系统外参标定方法得到精度结果: x、y和z方向的位置平均误差分别提高了13.073 mm、21.511 mm和18.159 mm,偏航角、俯仰角和姿态角的角度平均误差分别提高了0.225°、0.246°和0.246°。
当前巷道掘进过程中高粉尘、低照度等因素严重影响外参标定精度。针对以平行激光线为特征的悬臂式掘进机位姿检测系统外参标定难题,提出一种基于数字全站仪的系统外参标定方法,详细分析系统外参标定误差对测量系统的影响。通过建立视觉位姿测量系统中各模块之间的坐标转换关系,对系统外参标定原理进行数学建模,利用全站仪位姿检测方法得到全站仪系统外参标定结果下机身相对于巷道的位姿,对普通外参标定结果得到的机身相对于巷道位姿进行精度评价。实验结果表明:悬臂式掘进机全站仪系统外参标定方法位置测量误差在 ± 3 mm内,姿态角角度测量误差在0.08°内;利用全站仪系统外参标定方法得到精度结果: x、y和z方向的位置平均误差分别提高了13.073 mm、21.511 mm和18.159 mm,偏航角、俯仰角和姿态角的角度平均误差分别提高了0.225°、0.246°和0.246°。





2022, 41(12): 1936-1942.
doi: 10.13433/j.cnki.1003-8728.20220314
摘要:
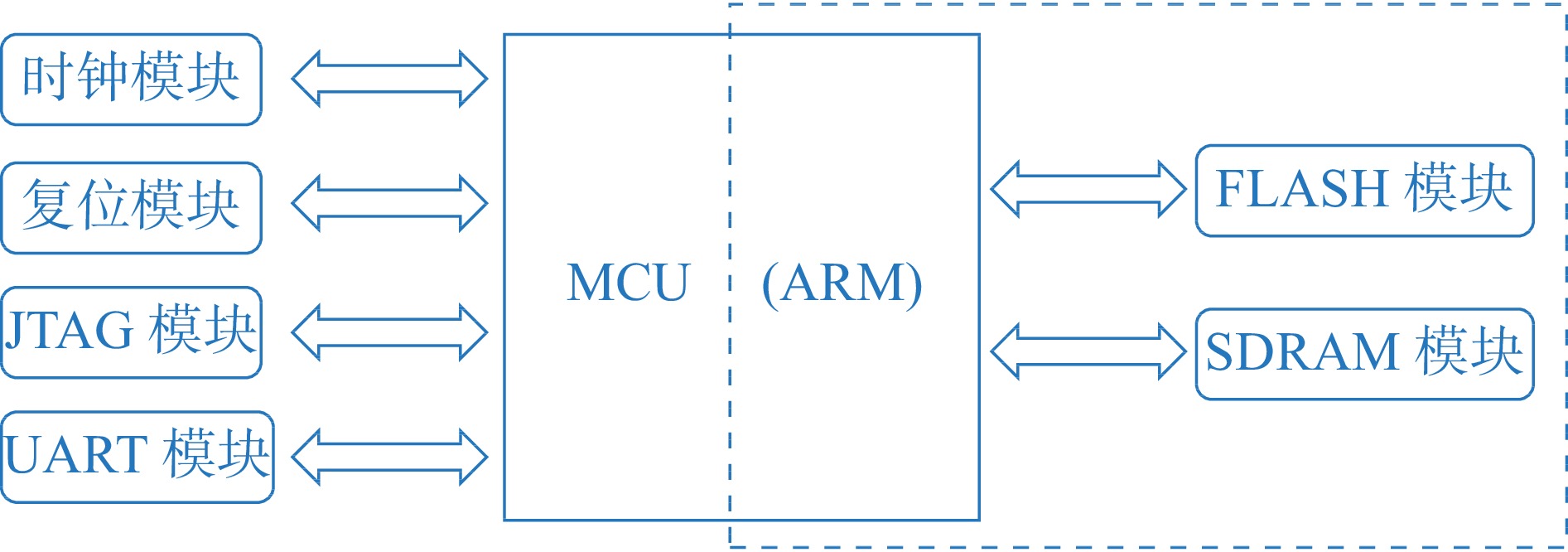
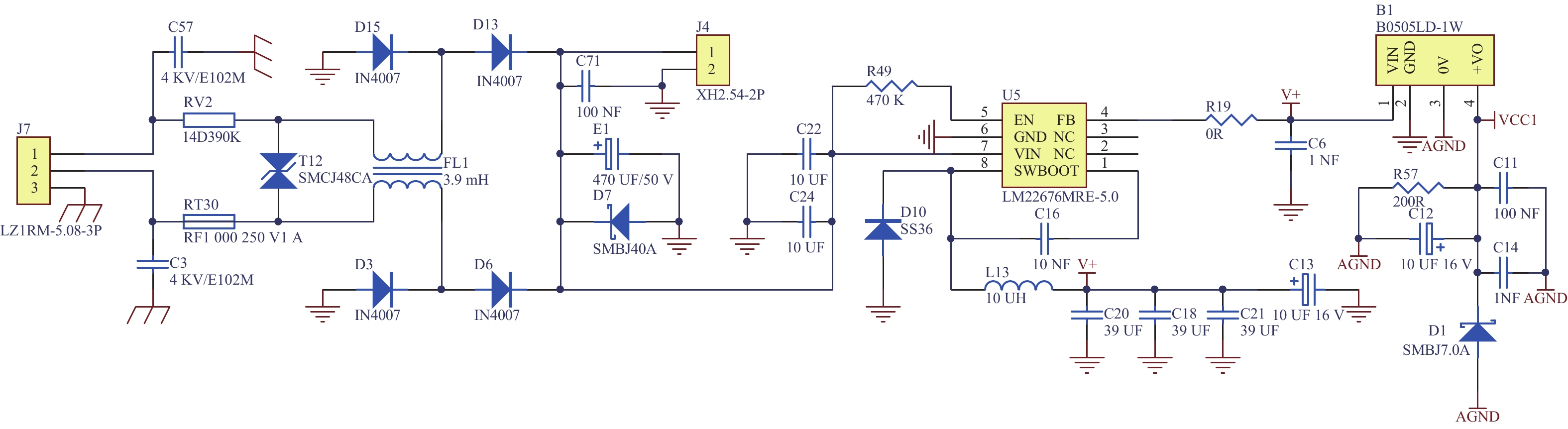
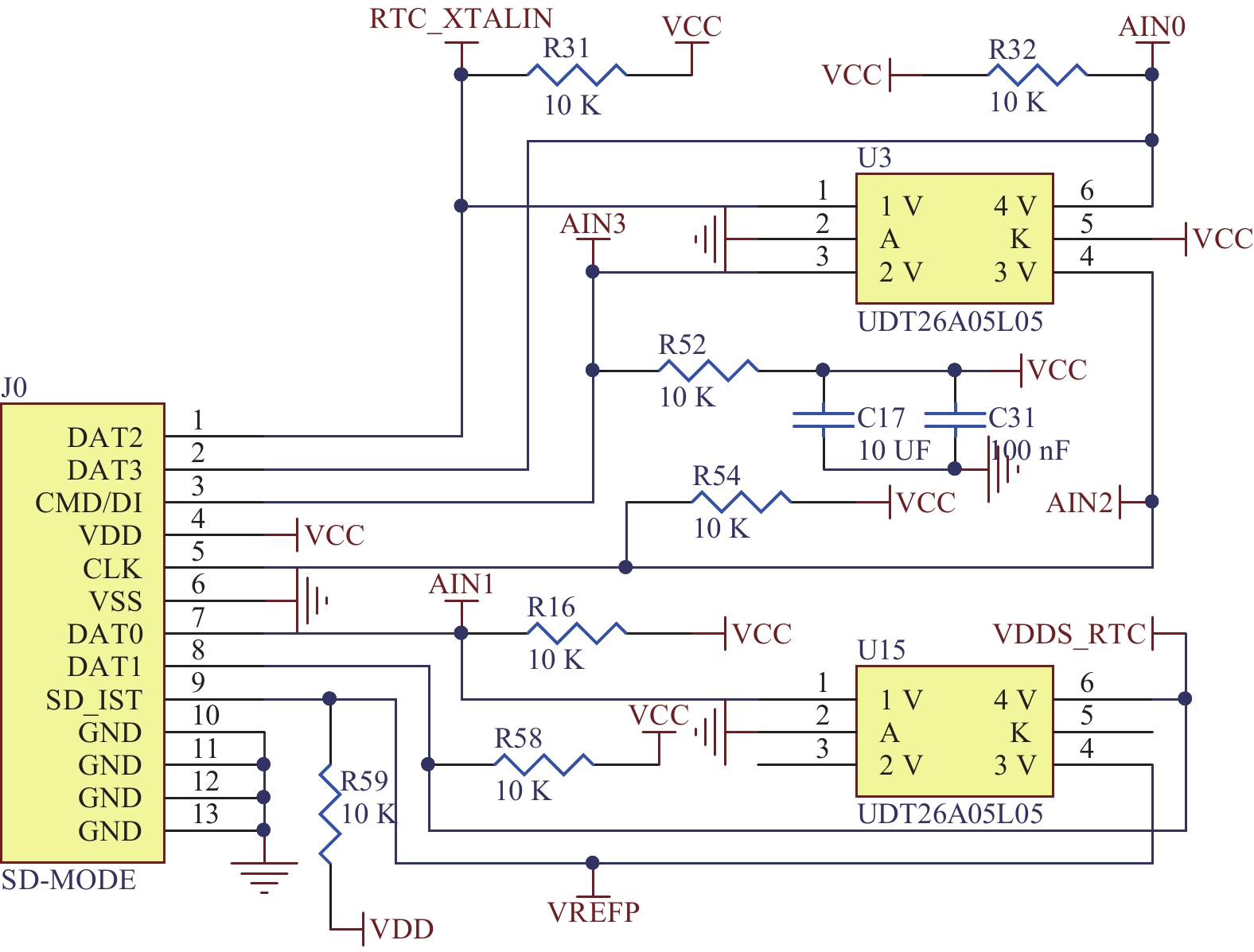
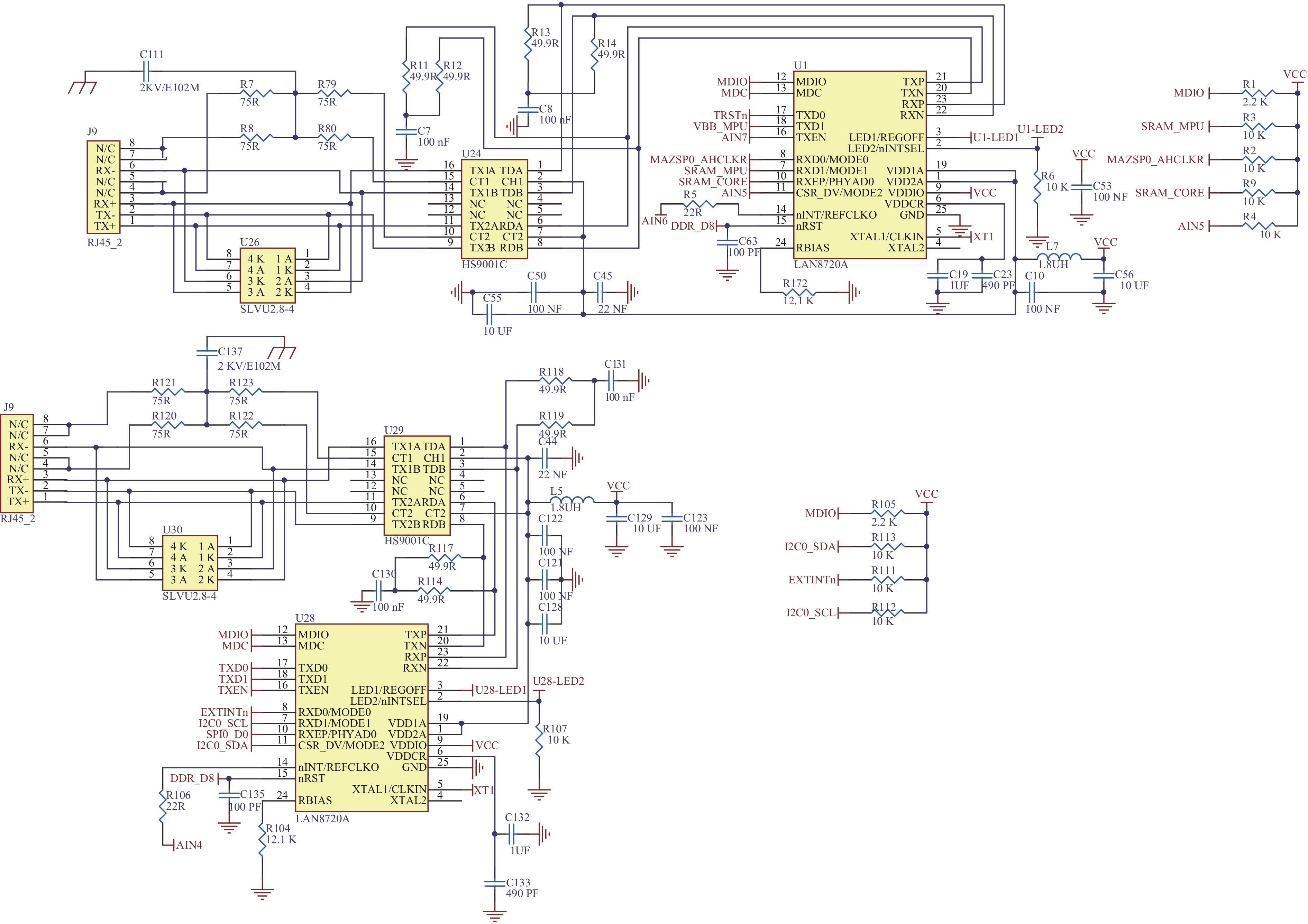
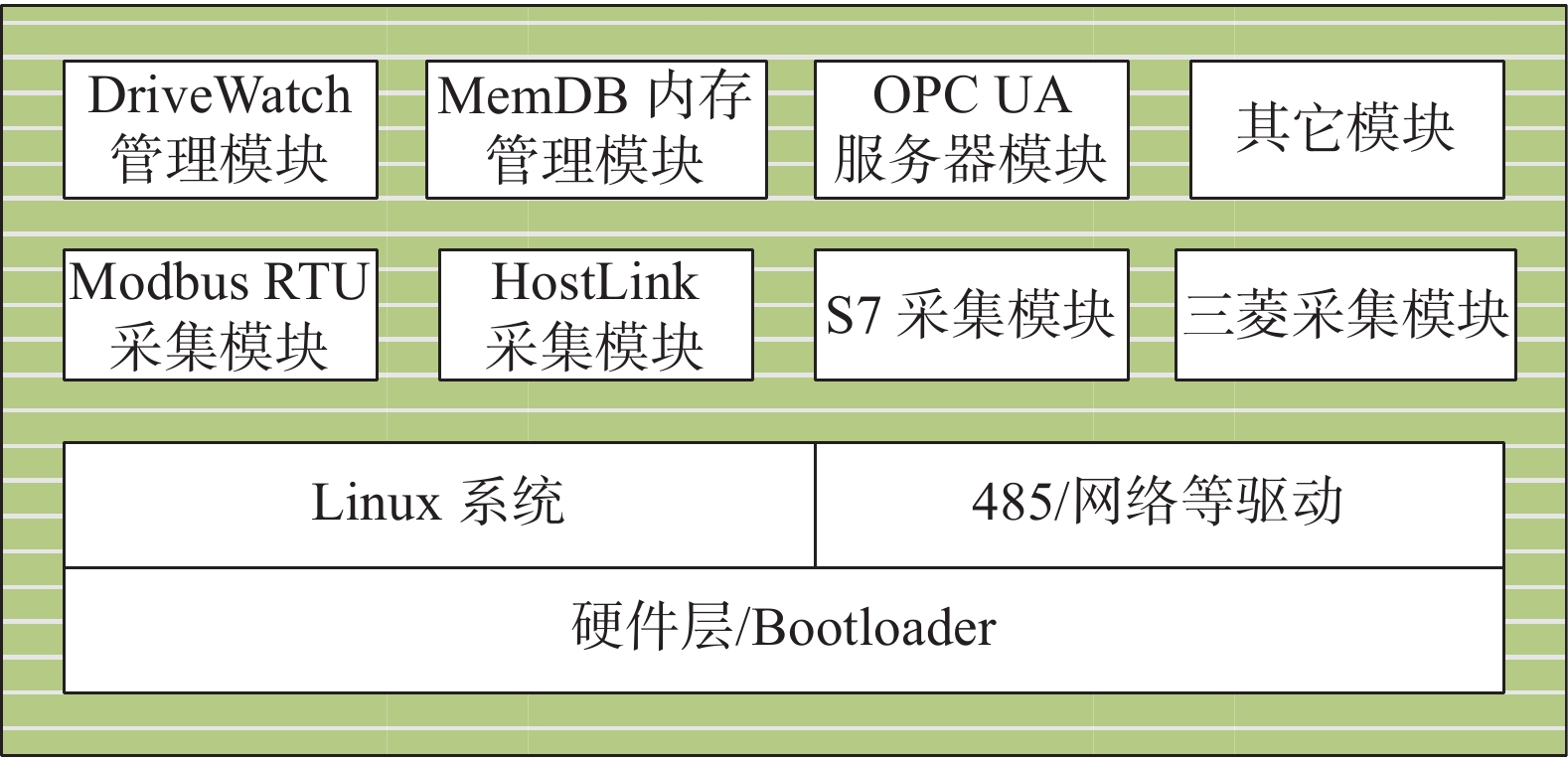
电力系统中不同厂家的现场设备接口各异,使得实际使用中现场设备很难被集成,形成一个信息孤岛。面向电力设备运行状态监测需求,结合当前电力装备普遍采用的Modbus RTU协议和各类PLC协议等为主要现场数据采集接口的现状,进行现有接口协议的OPC UA转换单元设计,研制异构电力设备OPC UA协议转换的嵌入式最小系统硬件平台,建立基于OPC UA协议标准化的统一输出接口。该硬件平台利用软件配置的方式实现现场数据采集智能设备统一接入,可高效支撑以OPC UA协议为输出的异构标准化跨平台运行,有利于同时支持更多不同种类采集终端云边协同参数采集的实现。
电力系统中不同厂家的现场设备接口各异,使得实际使用中现场设备很难被集成,形成一个信息孤岛。面向电力设备运行状态监测需求,结合当前电力装备普遍采用的Modbus RTU协议和各类PLC协议等为主要现场数据采集接口的现状,进行现有接口协议的OPC UA转换单元设计,研制异构电力设备OPC UA协议转换的嵌入式最小系统硬件平台,建立基于OPC UA协议标准化的统一输出接口。该硬件平台利用软件配置的方式实现现场数据采集智能设备统一接入,可高效支撑以OPC UA协议为输出的异构标准化跨平台运行,有利于同时支持更多不同种类采集终端云边协同参数采集的实现。






2022, 41(12): 1943-1949.
doi: 10.13433/j.cnki.1003-8728.20200535
摘要:
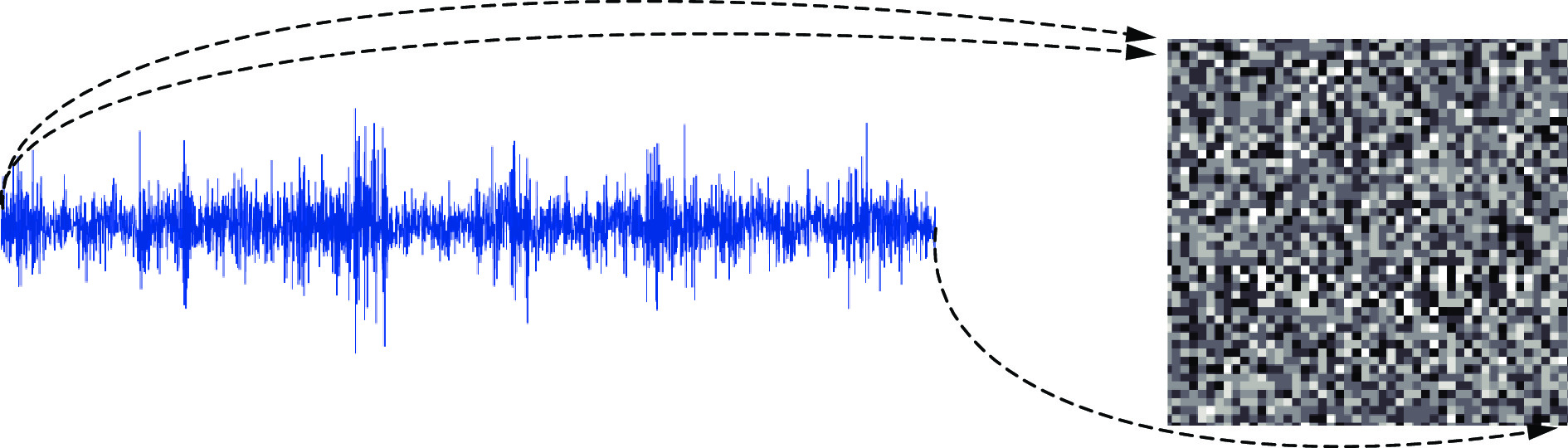
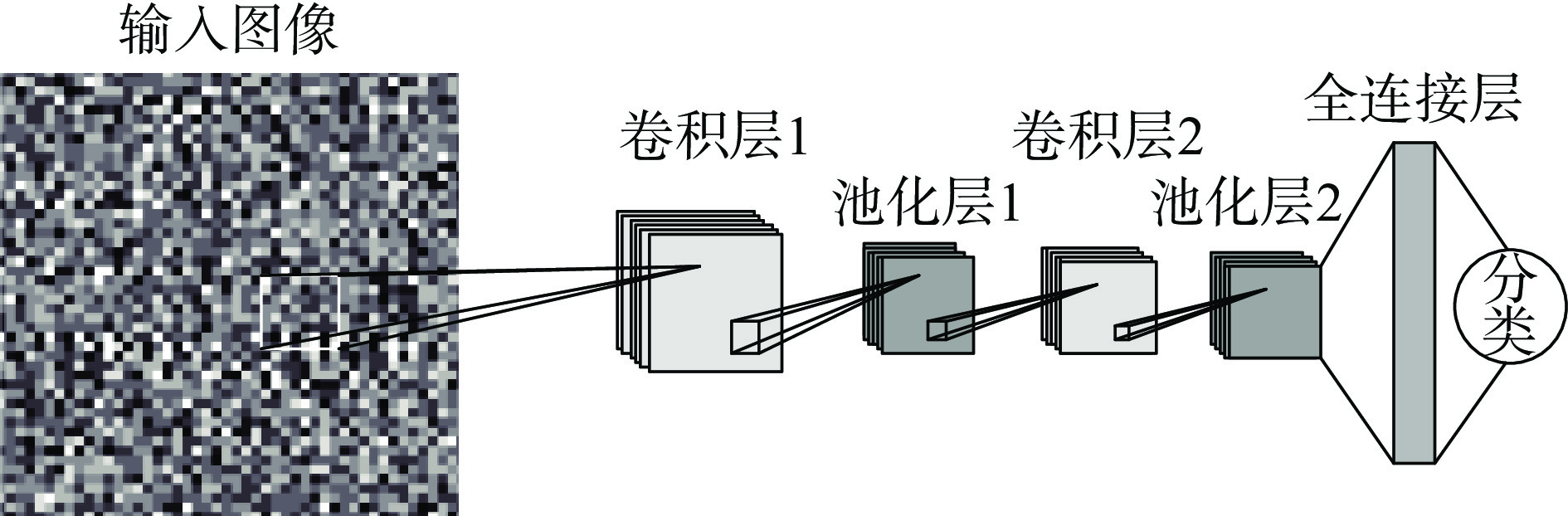
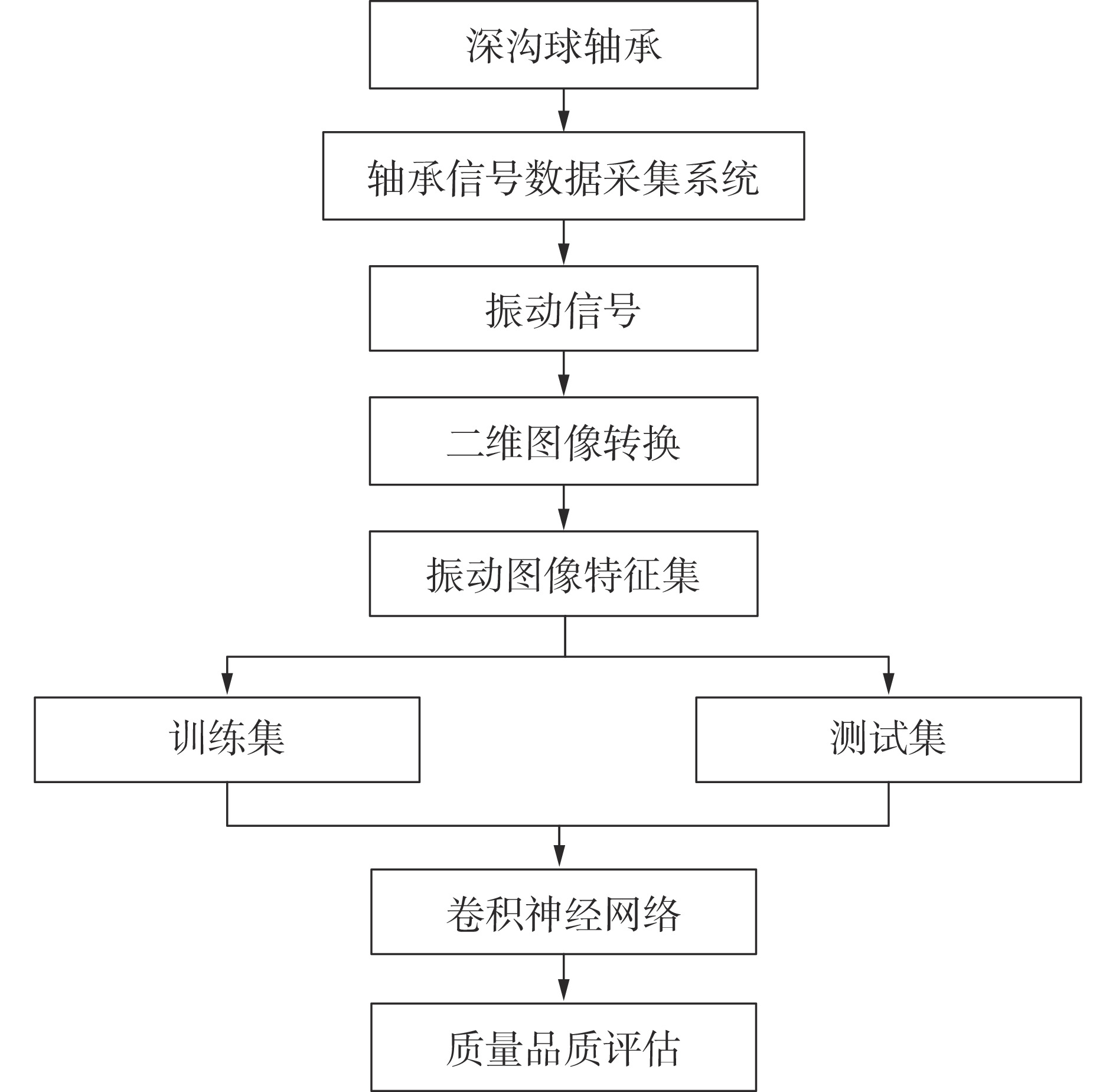
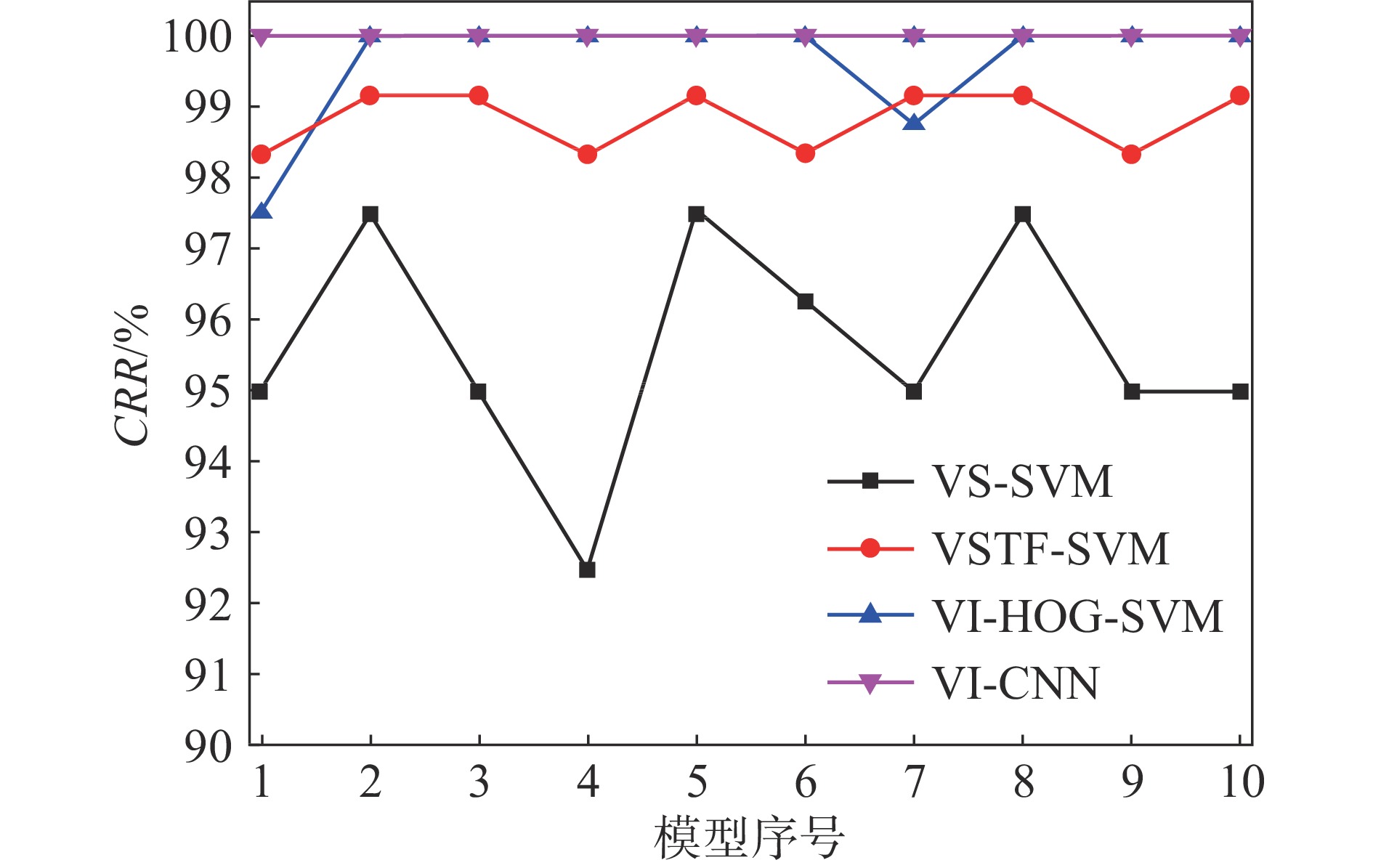
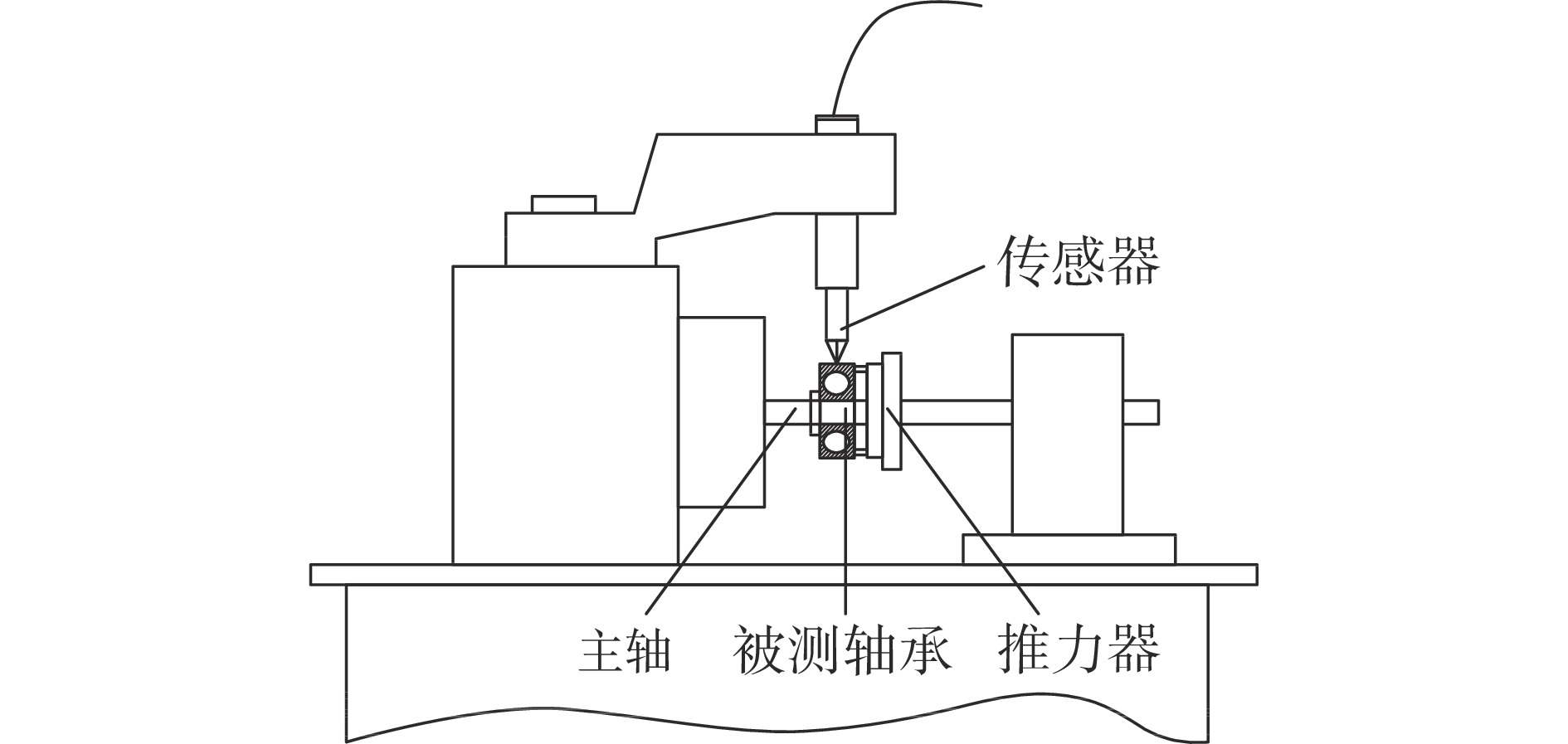
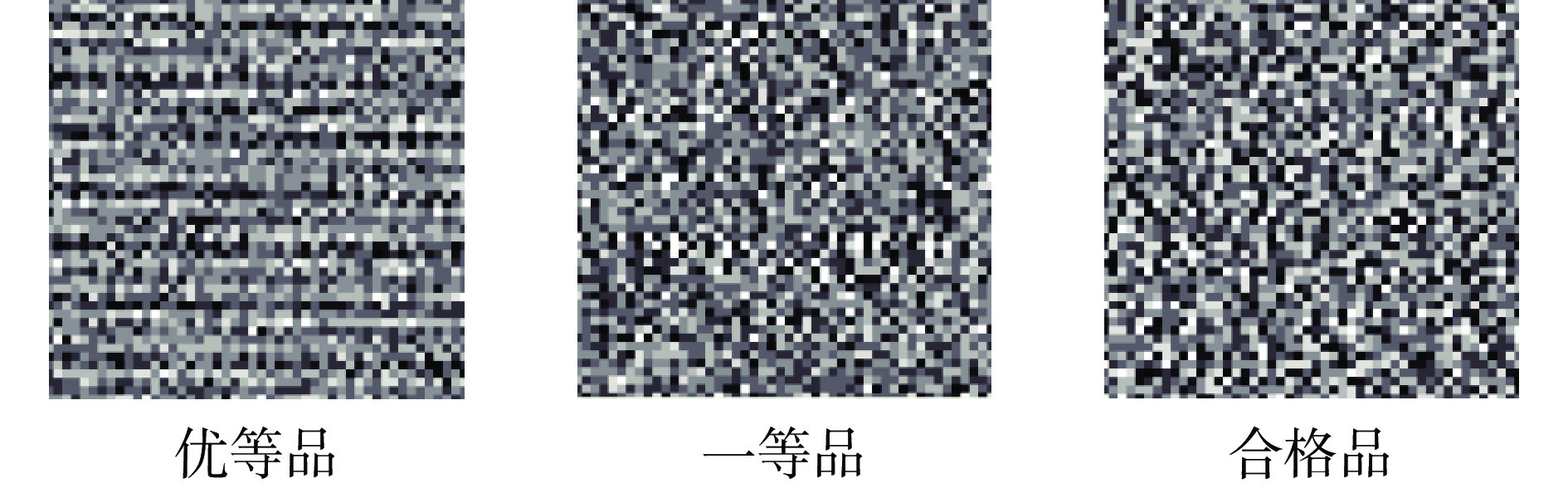
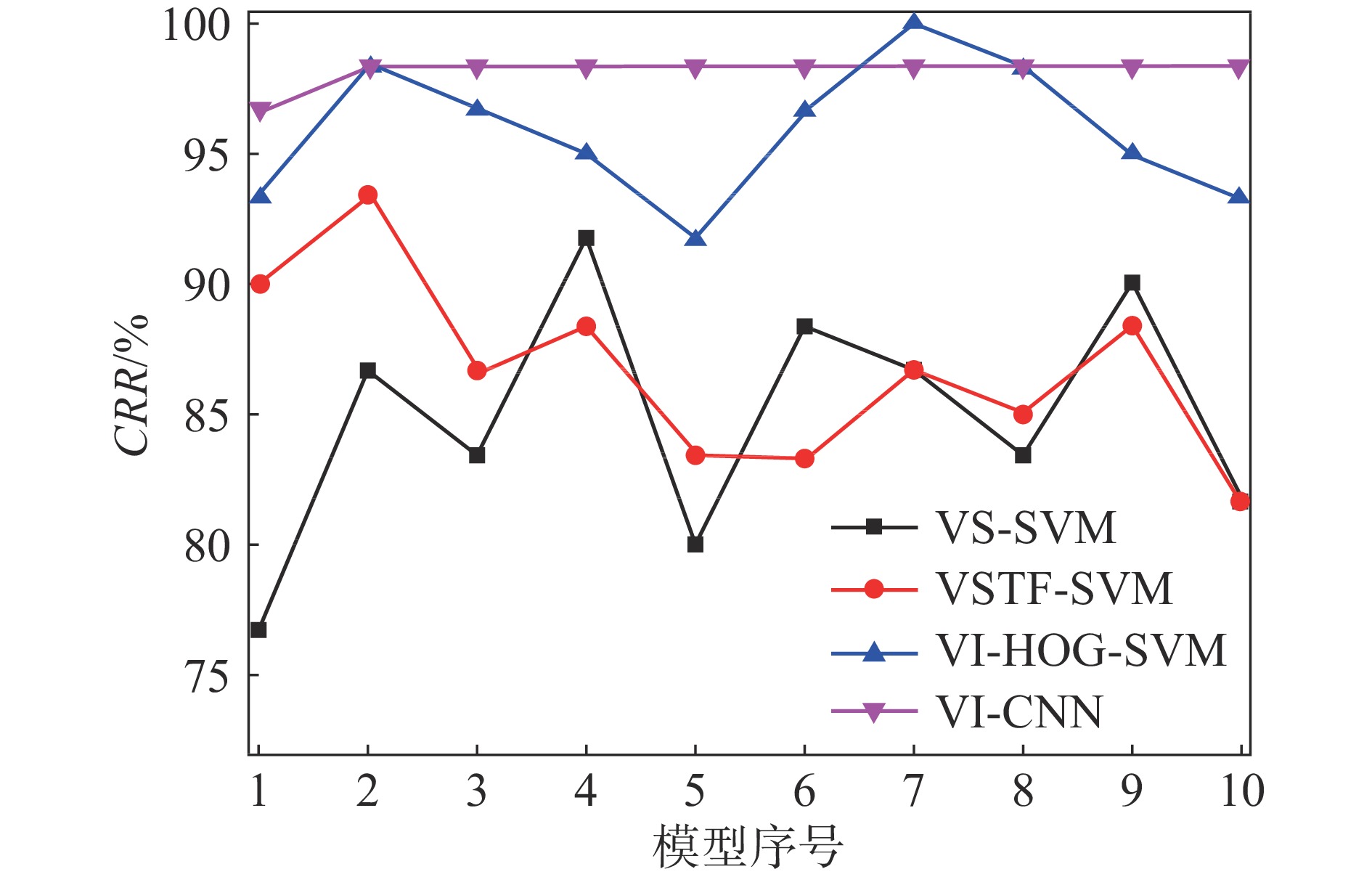
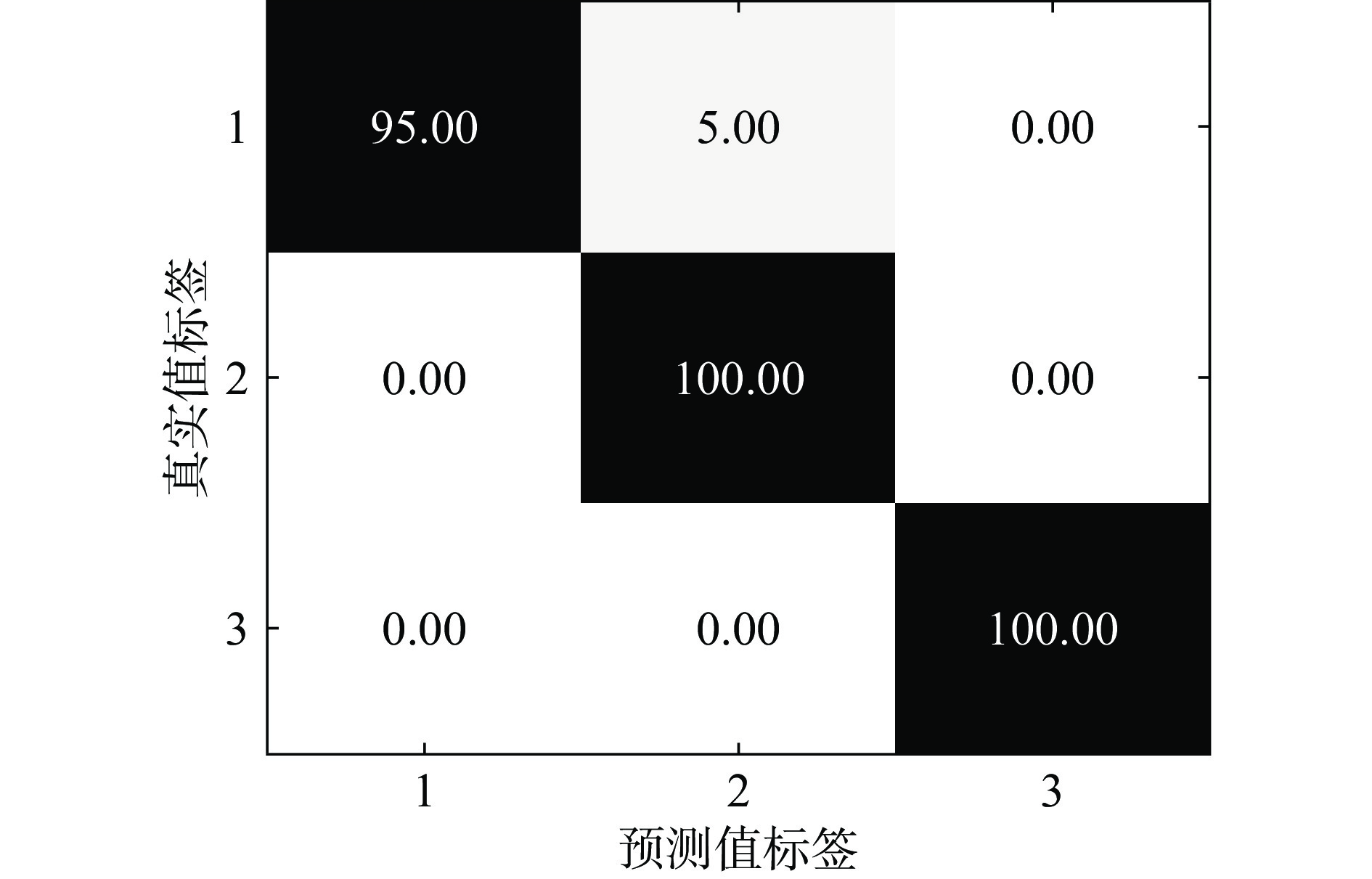
本文以强背景噪声下振动信号特征提取和建模分析为研究目标,提出将振动信号转换为振动图像的信号变换方法,以深沟球轴承故障诊断振动信号和轴承质量等级评估振动信号为实验数据集,基于振动图像的卷积神经网络模型(VI-CNN),并采用正确识别率(CRR)作为模型精度的评价指标。实验结果表明:对于轴承故障诊断和质量等级评估的定性判别,采用VI-CNN对比其他建模方法正确识别率分别为100%和98.16%,模型有更好的稳健性。
本文以强背景噪声下振动信号特征提取和建模分析为研究目标,提出将振动信号转换为振动图像的信号变换方法,以深沟球轴承故障诊断振动信号和轴承质量等级评估振动信号为实验数据集,基于振动图像的卷积神经网络模型(VI-CNN),并采用正确识别率(CRR)作为模型精度的评价指标。实验结果表明:对于轴承故障诊断和质量等级评估的定性判别,采用VI-CNN对比其他建模方法正确识别率分别为100%和98.16%,模型有更好的稳健性。



2022, 41(12): 1950-1957.
doi: 10.13433/j.cnki.1003-8728.20220311
摘要:
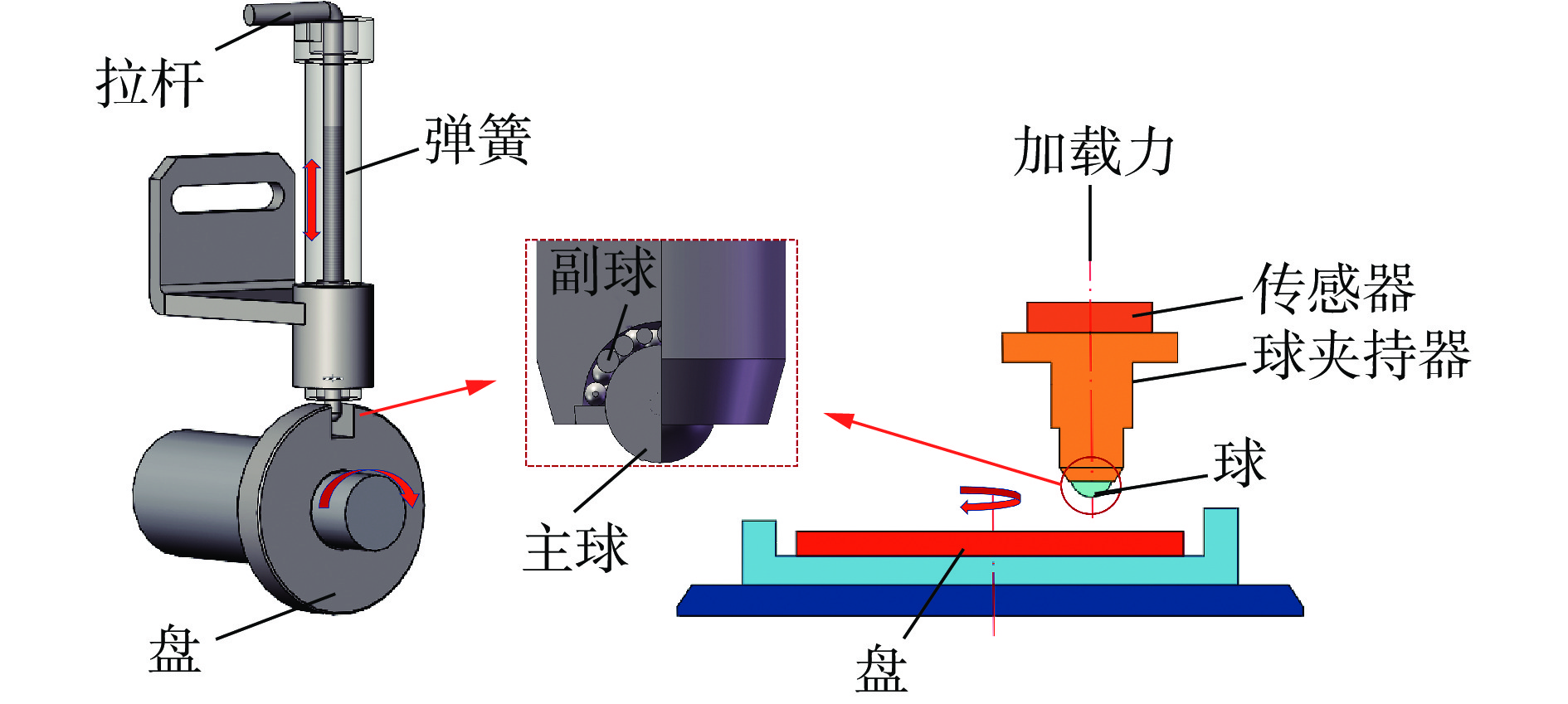
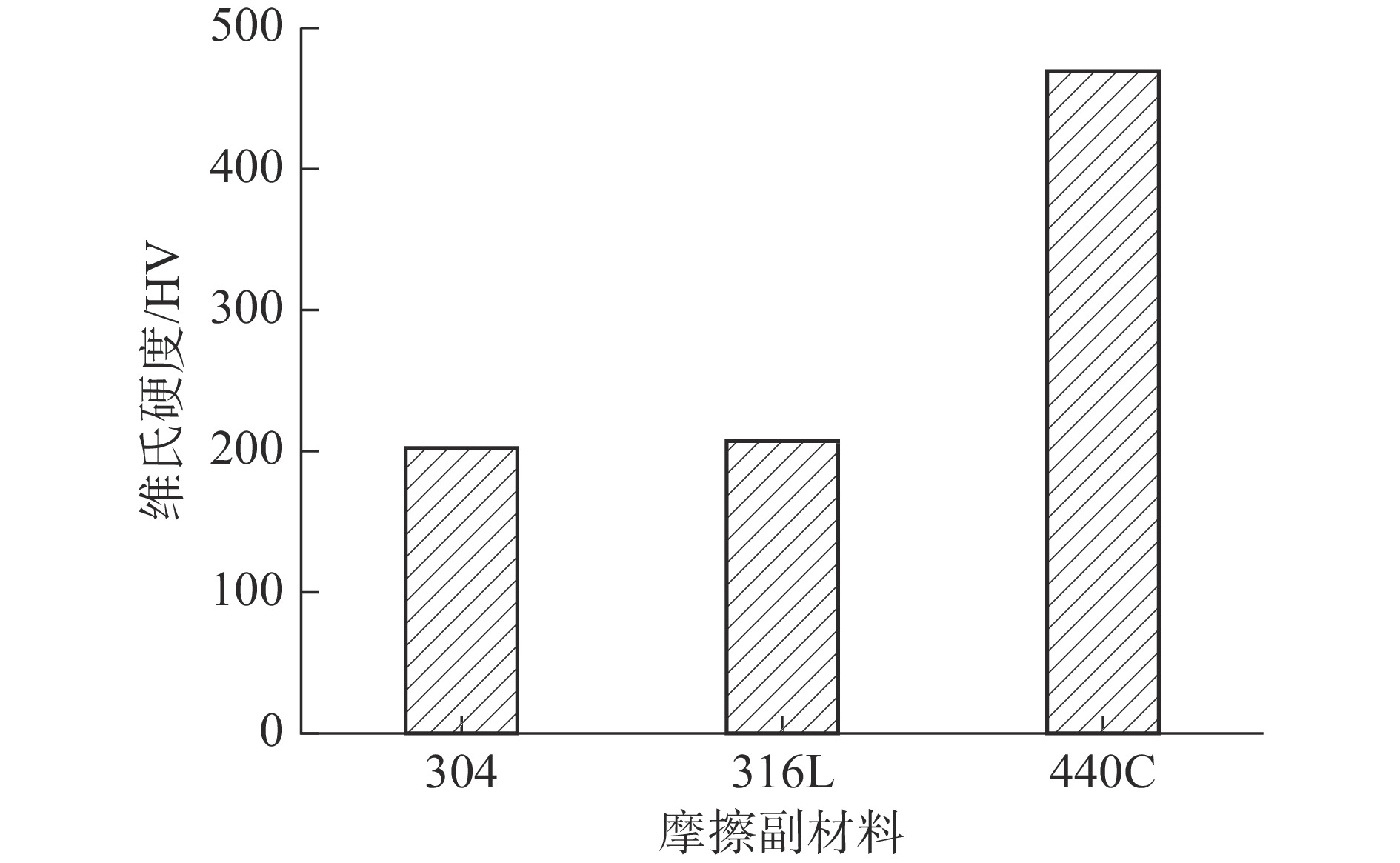
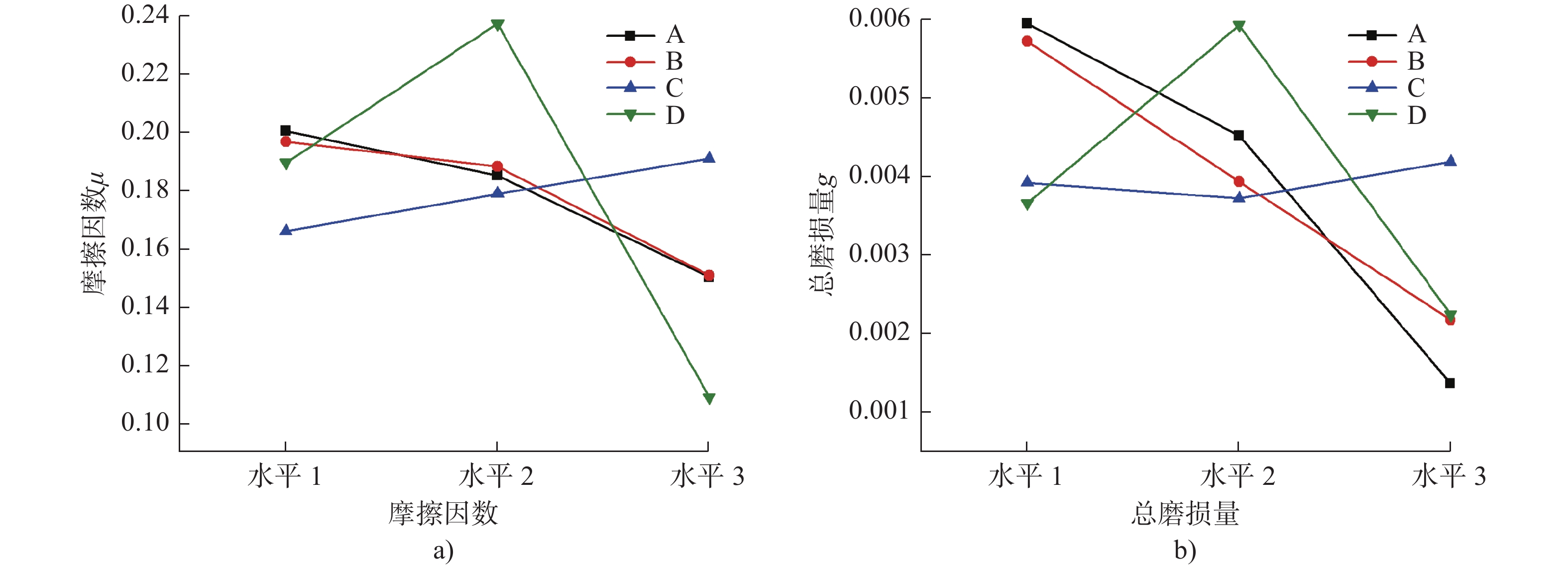
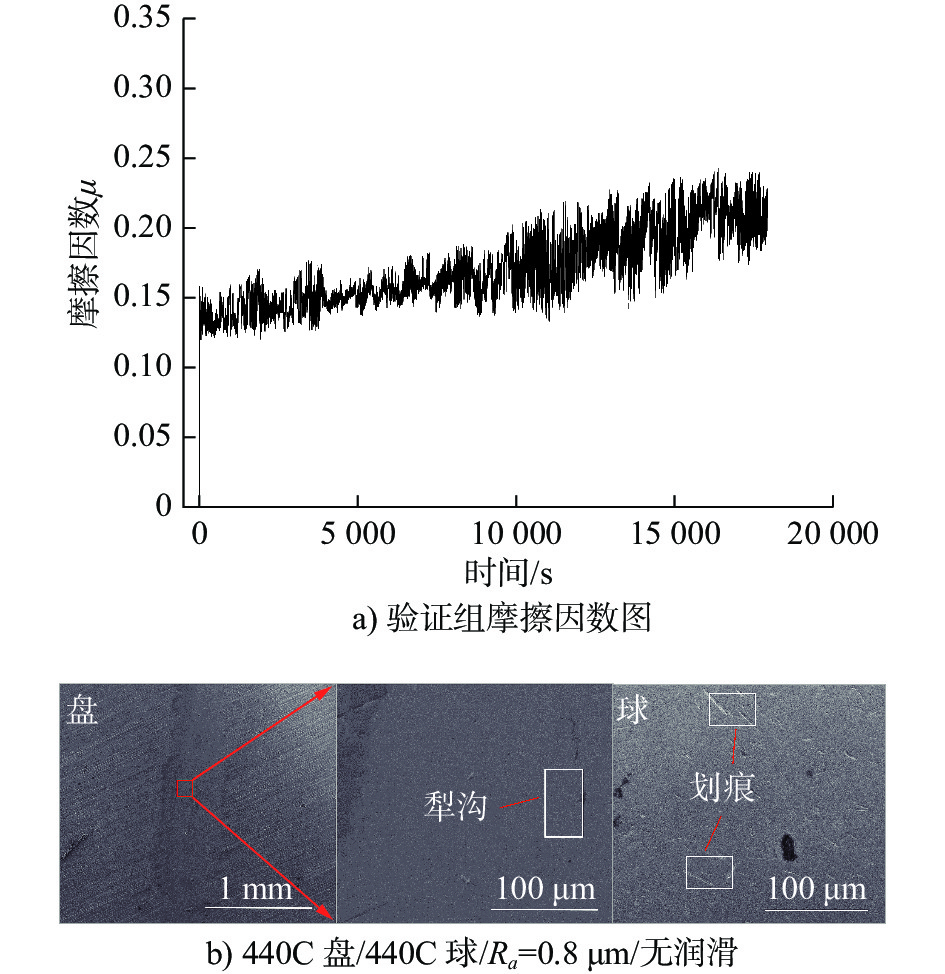
为优选孔板阀滑阀自锁装置配对副耐磨性能影响因素,选取不同球/盘配对副材料、盘粗糙度和润滑条件开展正交滚滑摩擦试验。敏感性分析结果表明,试验优化参数为:盘材料440C,球材料440C,盘粗糙度Ra = 0.4 μm,润滑条件脂润滑。优选参数配对副在试验后运行良好,球/盘表面形貌无明显磨损,摩擦系数无突变,说明优选参数的抗磨性能满足使用寿命需求。
为优选孔板阀滑阀自锁装置配对副耐磨性能影响因素,选取不同球/盘配对副材料、盘粗糙度和润滑条件开展正交滚滑摩擦试验。敏感性分析结果表明,试验优化参数为:盘材料440C,球材料440C,盘粗糙度Ra = 0.4 μm,润滑条件脂润滑。优选参数配对副在试验后运行良好,球/盘表面形貌无明显磨损,摩擦系数无突变,说明优选参数的抗磨性能满足使用寿命需求。

2022, 41(12): 1958-1964.
doi: 10.13433/j.cnki.1003-8728.20200529
摘要:
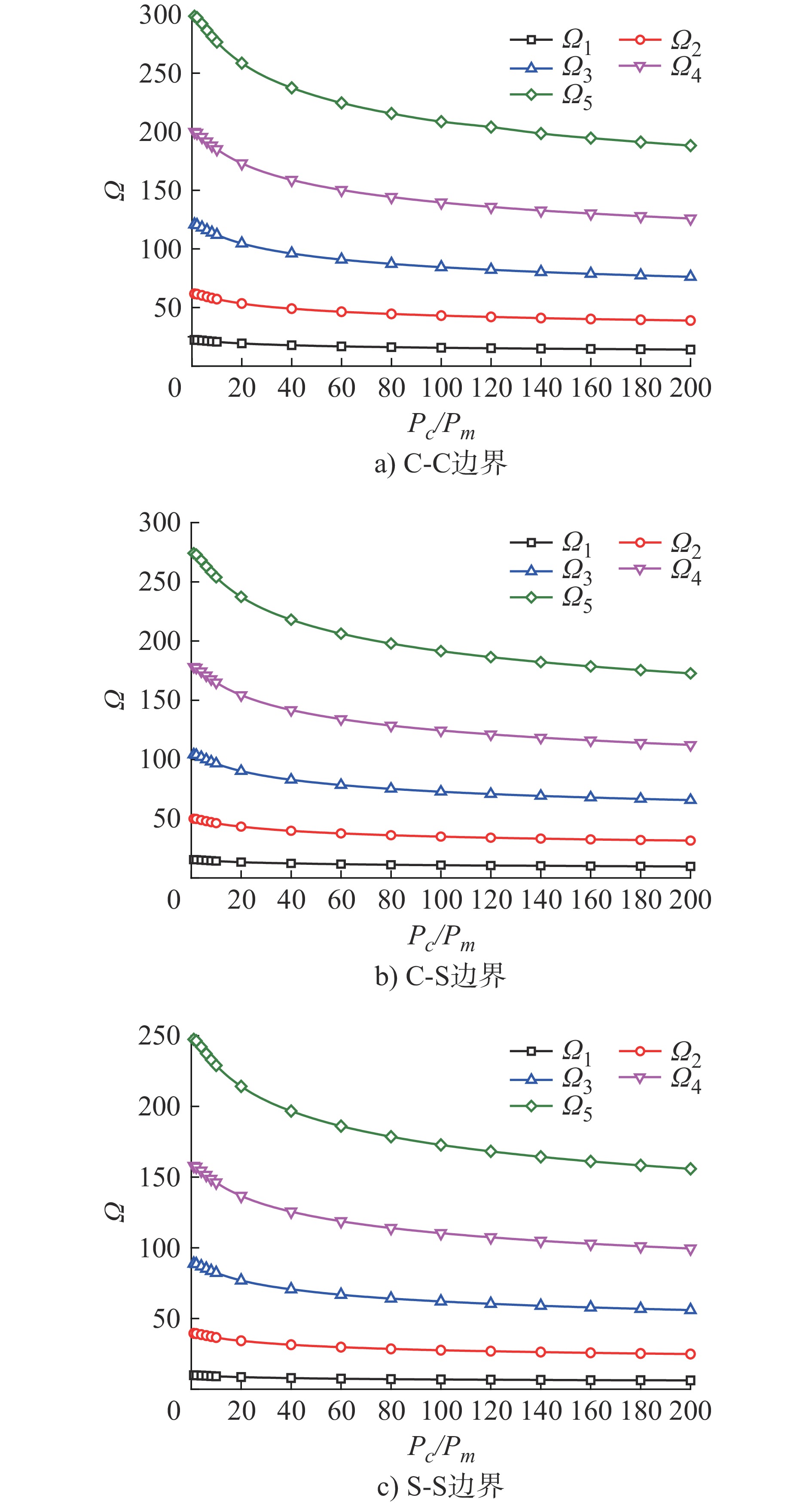
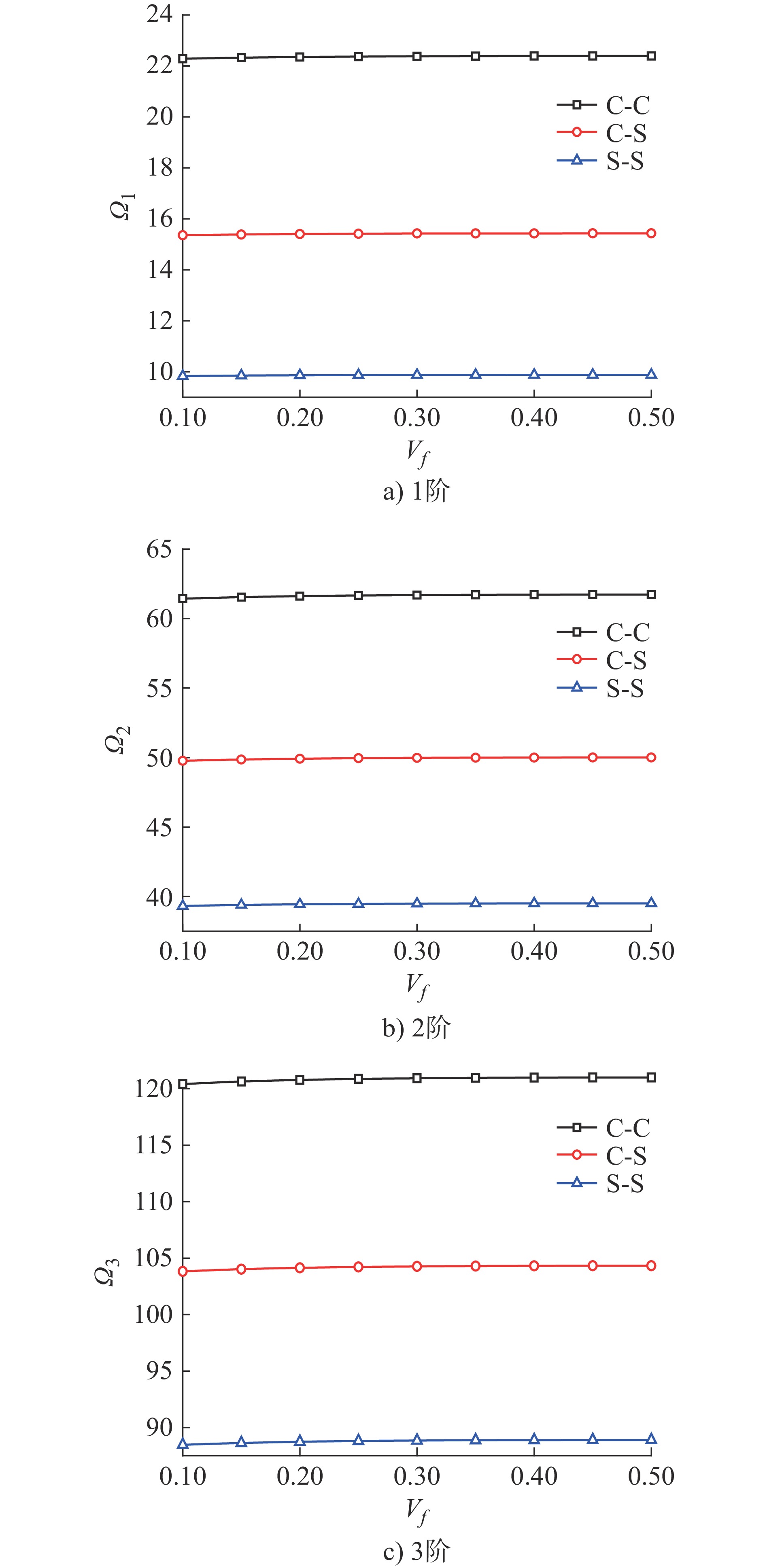
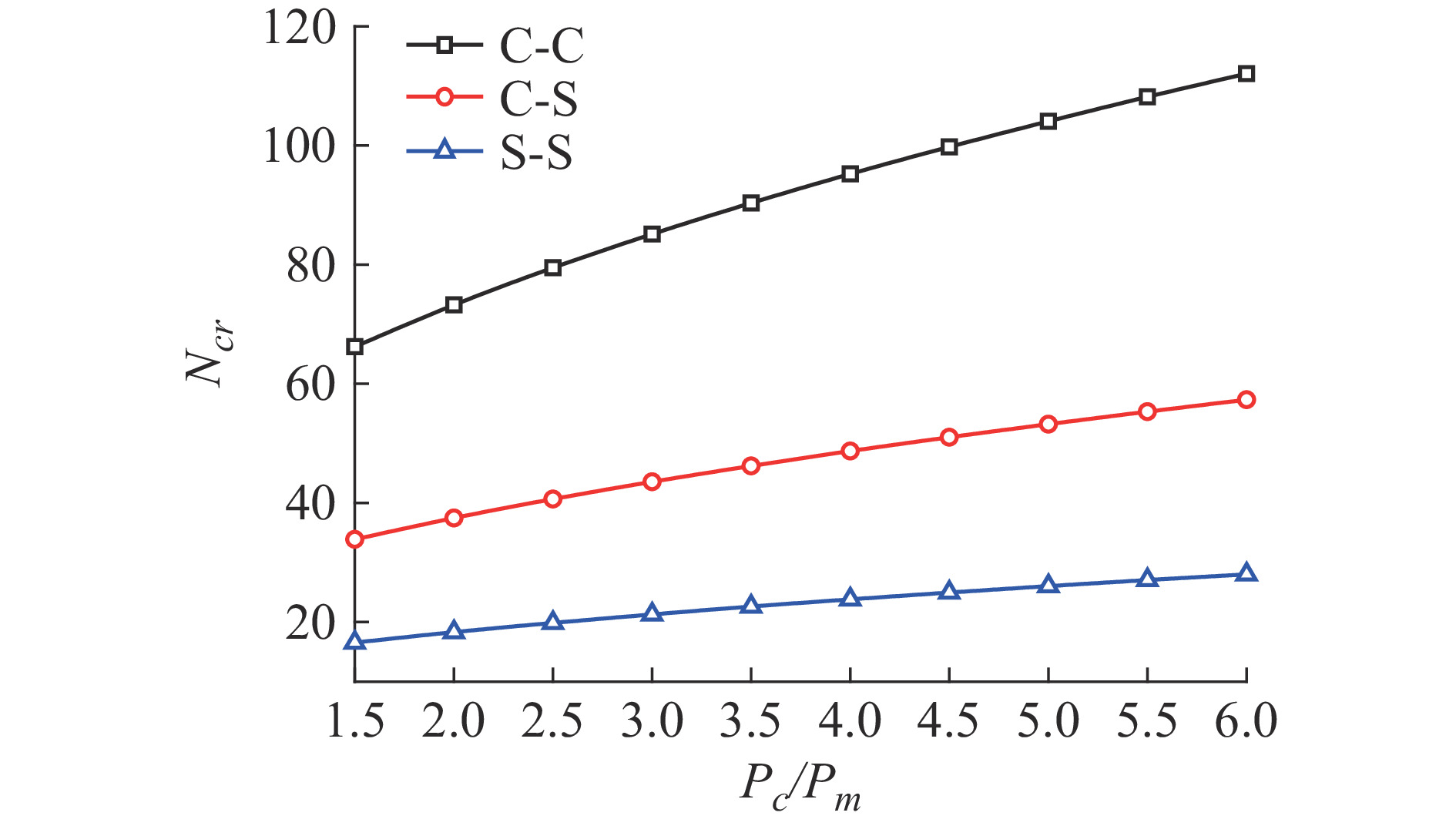
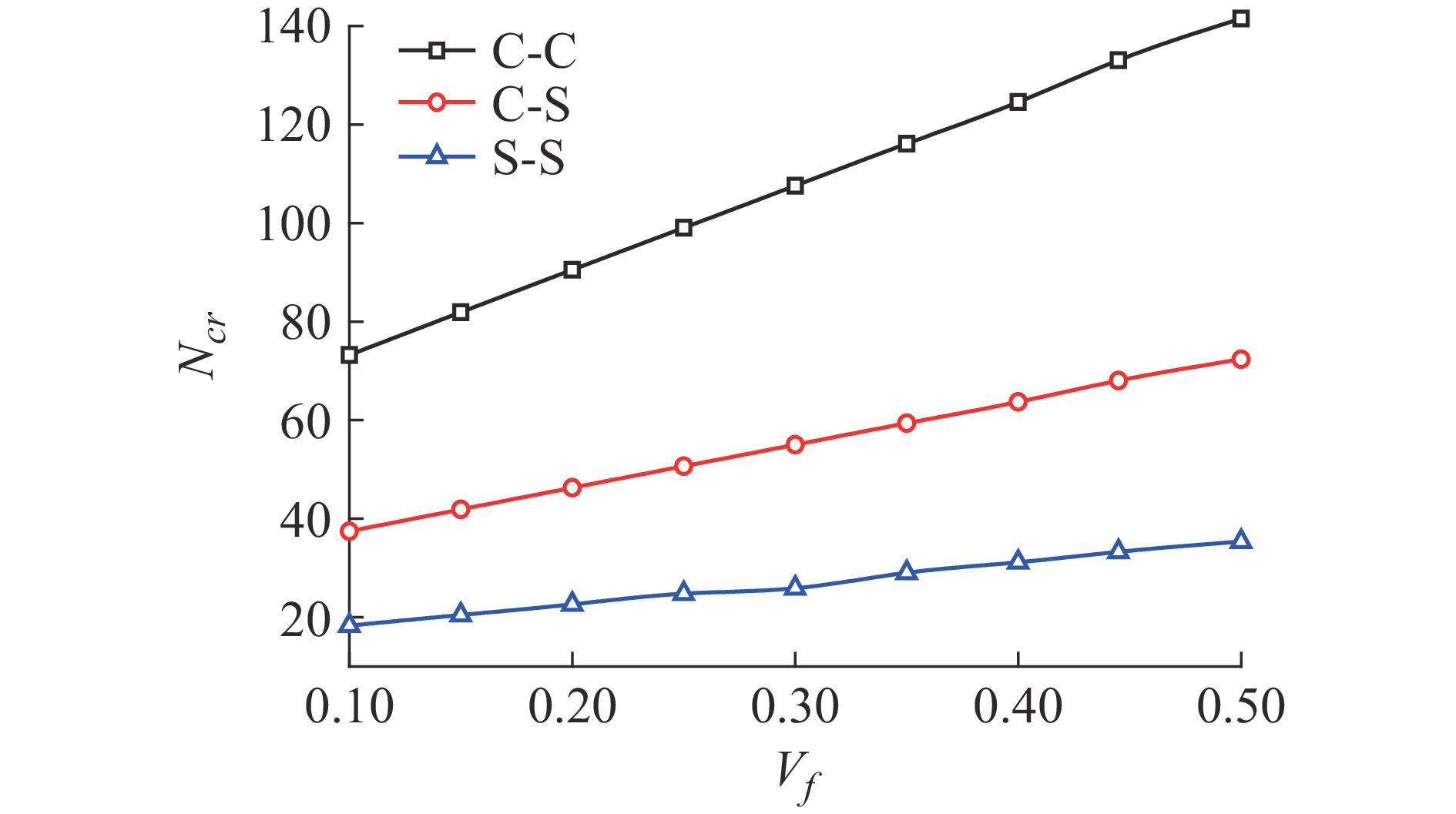
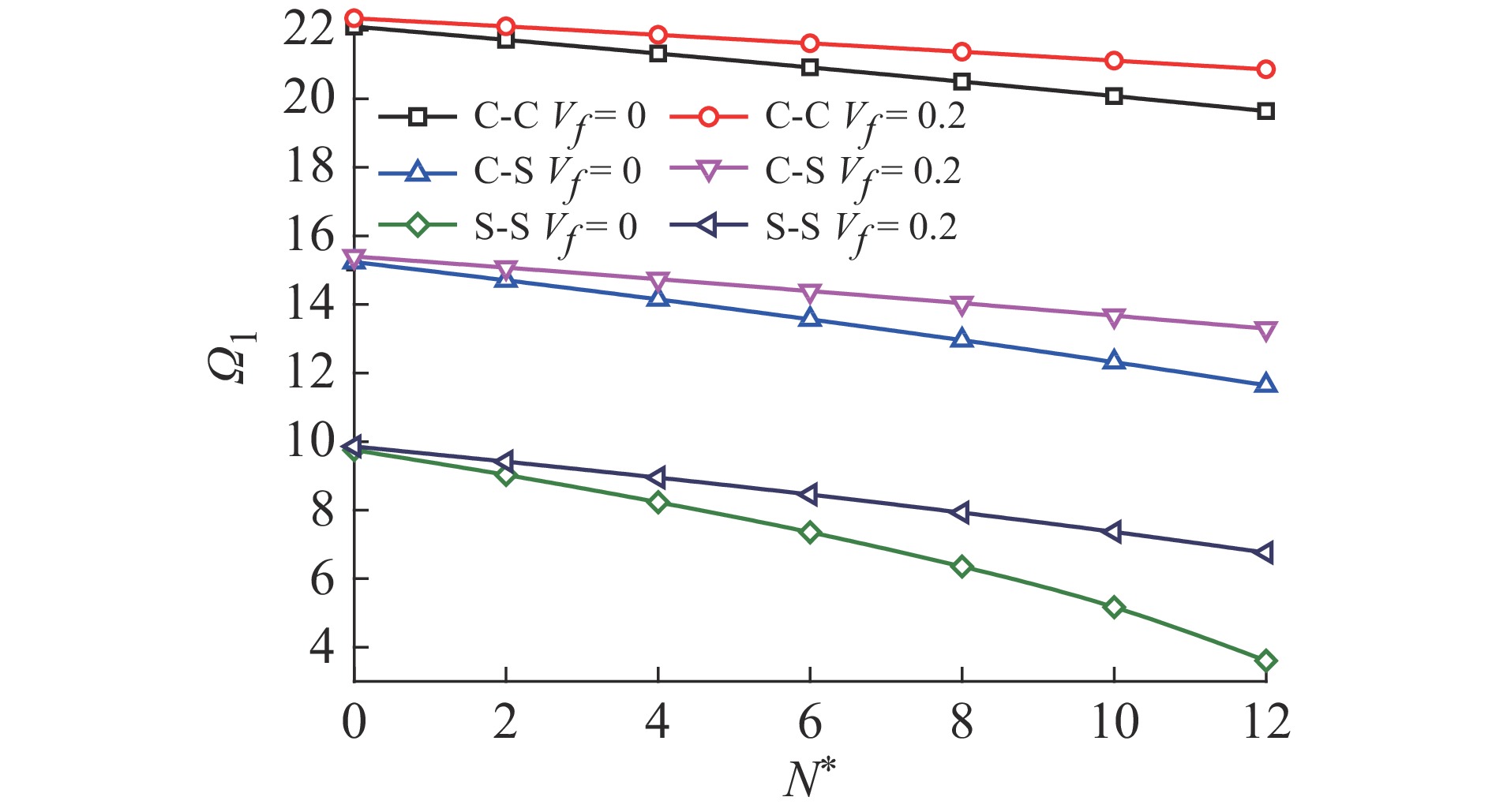
基于经典梁理论(CBT)研究轴向力作用下纤维增强功能梯度材料(FGM)梁的横向自由振动和临界屈曲载荷问题。首先考虑由混合律模型来表征纤维增强FGM梁的材料属性,其次利用Hamilton原理推导轴向力作用下纤维增强FGM梁横向自由振动和临界屈曲载荷的控制微分方程,并应用微分变换法(DTM)对控制微分方程及边界条件进行变换,计算了纤维增强FGM梁在固定-固定(C-C)、固定-简支(C-S)和简支-简支(S-S)3种边界条件下横向自由振动的无量纲固有频率和无量纲临界屈曲载荷。退化为各向同性梁和FGM梁,并与已有文献结果进行对比,验证了本文方法的有效性。最后讨论在不同边界条件下纤维增强FGM梁的刚度比、纤维体积分数和无量纲压载荷对无量纲固有频率的影响以及各参数对无量纲临界屈曲载荷的影响。
基于经典梁理论(CBT)研究轴向力作用下纤维增强功能梯度材料(FGM)梁的横向自由振动和临界屈曲载荷问题。首先考虑由混合律模型来表征纤维增强FGM梁的材料属性,其次利用Hamilton原理推导轴向力作用下纤维增强FGM梁横向自由振动和临界屈曲载荷的控制微分方程,并应用微分变换法(DTM)对控制微分方程及边界条件进行变换,计算了纤维增强FGM梁在固定-固定(C-C)、固定-简支(C-S)和简支-简支(S-S)3种边界条件下横向自由振动的无量纲固有频率和无量纲临界屈曲载荷。退化为各向同性梁和FGM梁,并与已有文献结果进行对比,验证了本文方法的有效性。最后讨论在不同边界条件下纤维增强FGM梁的刚度比、纤维体积分数和无量纲压载荷对无量纲固有频率的影响以及各参数对无量纲临界屈曲载荷的影响。

2022, 41(12): 1965-1972.
doi: 10.13433/j.cnki.1003-8728.20200538
摘要:
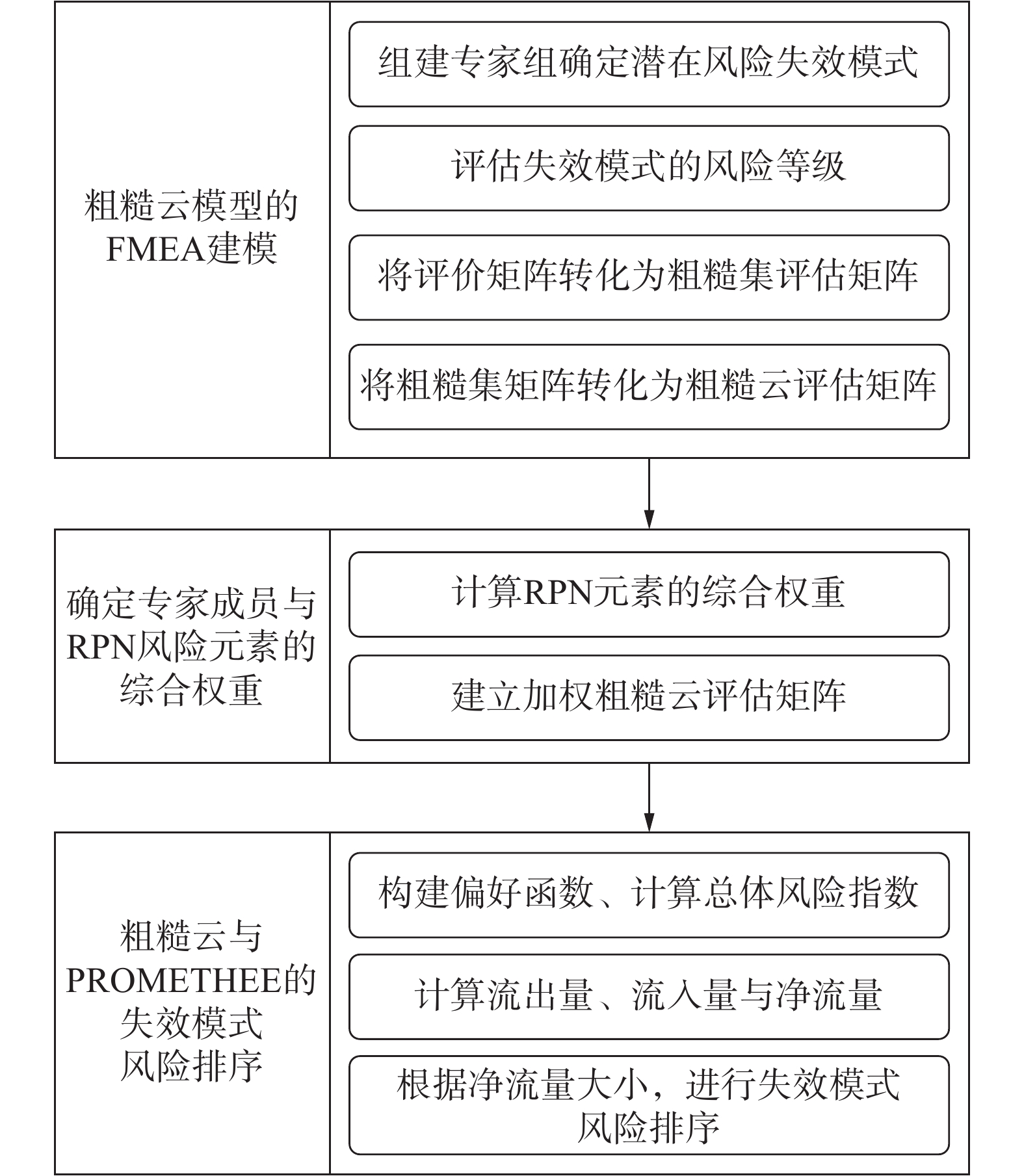
针对目前航空发动机主轴轴承关键失效模式确定困难的问题,提出了一种粗糙云模型与偏好顺序结构评估(PROMETHEE)的航发主轴轴承失效模式重要度评估方法。结合失效模式与影响分析(FMEA)方法,通过专家系统构建主轴轴承各失效模式的风险评估矩阵;运用粗糙集理论与云模型理论,将风险评估矩阵转换为粗糙云评估矩阵,描述专家评价信息中存在的主观性、模糊性和随机性问题;运用PROMETHEE计算各失效模式的流出量、流入量与净流量,根据净流量的大小对航发主轴轴承的6种失效模式进行风险排序,为制定预防措施和降低风险提供可靠依据。
针对目前航空发动机主轴轴承关键失效模式确定困难的问题,提出了一种粗糙云模型与偏好顺序结构评估(PROMETHEE)的航发主轴轴承失效模式重要度评估方法。结合失效模式与影响分析(FMEA)方法,通过专家系统构建主轴轴承各失效模式的风险评估矩阵;运用粗糙集理论与云模型理论,将风险评估矩阵转换为粗糙云评估矩阵,描述专家评价信息中存在的主观性、模糊性和随机性问题;运用PROMETHEE计算各失效模式的流出量、流入量与净流量,根据净流量的大小对航发主轴轴承的6种失效模式进行风险排序,为制定预防措施和降低风险提供可靠依据。