




Hybrid Visual Servoing Control of a Legged Mobile Robot
-
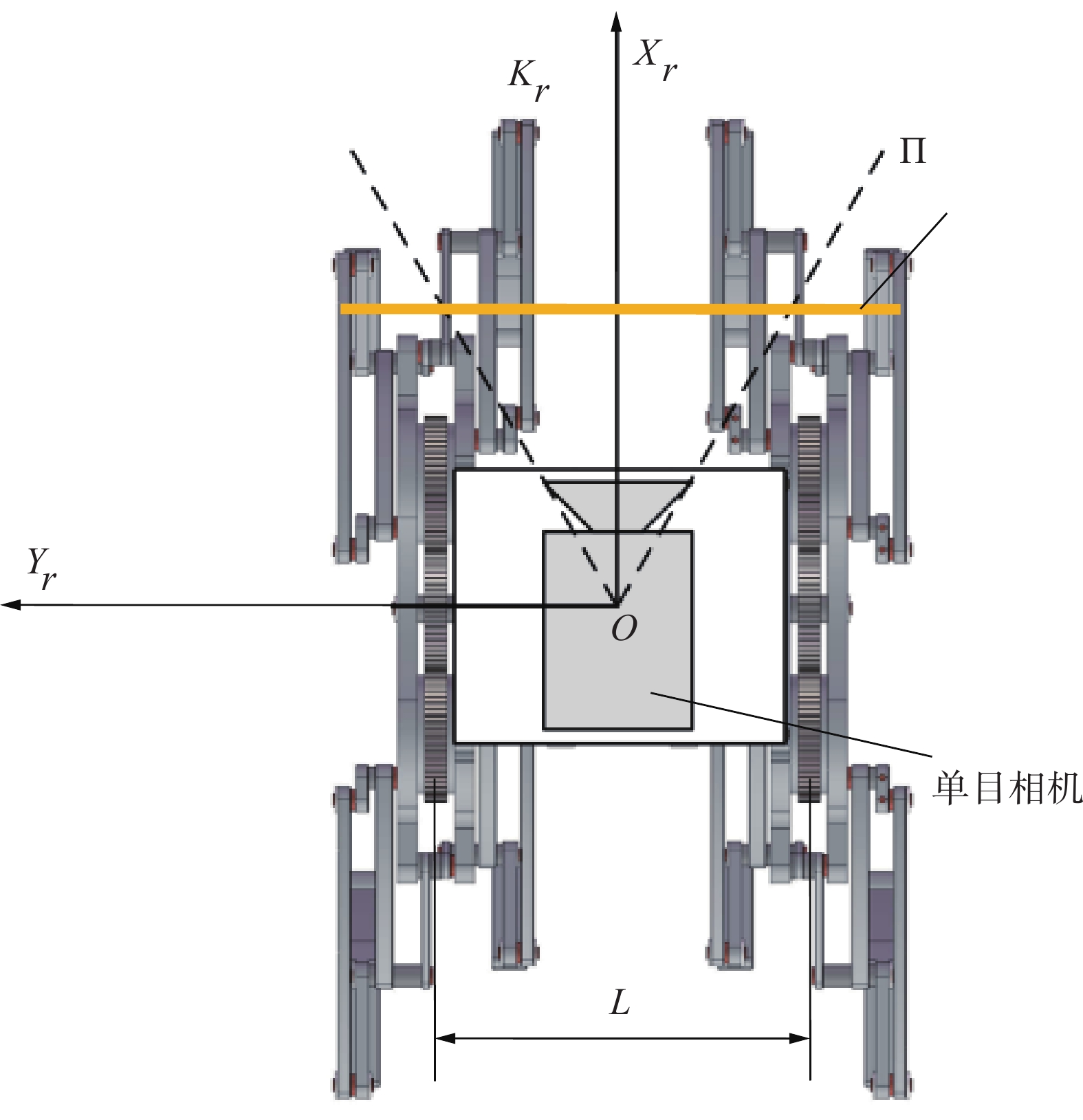
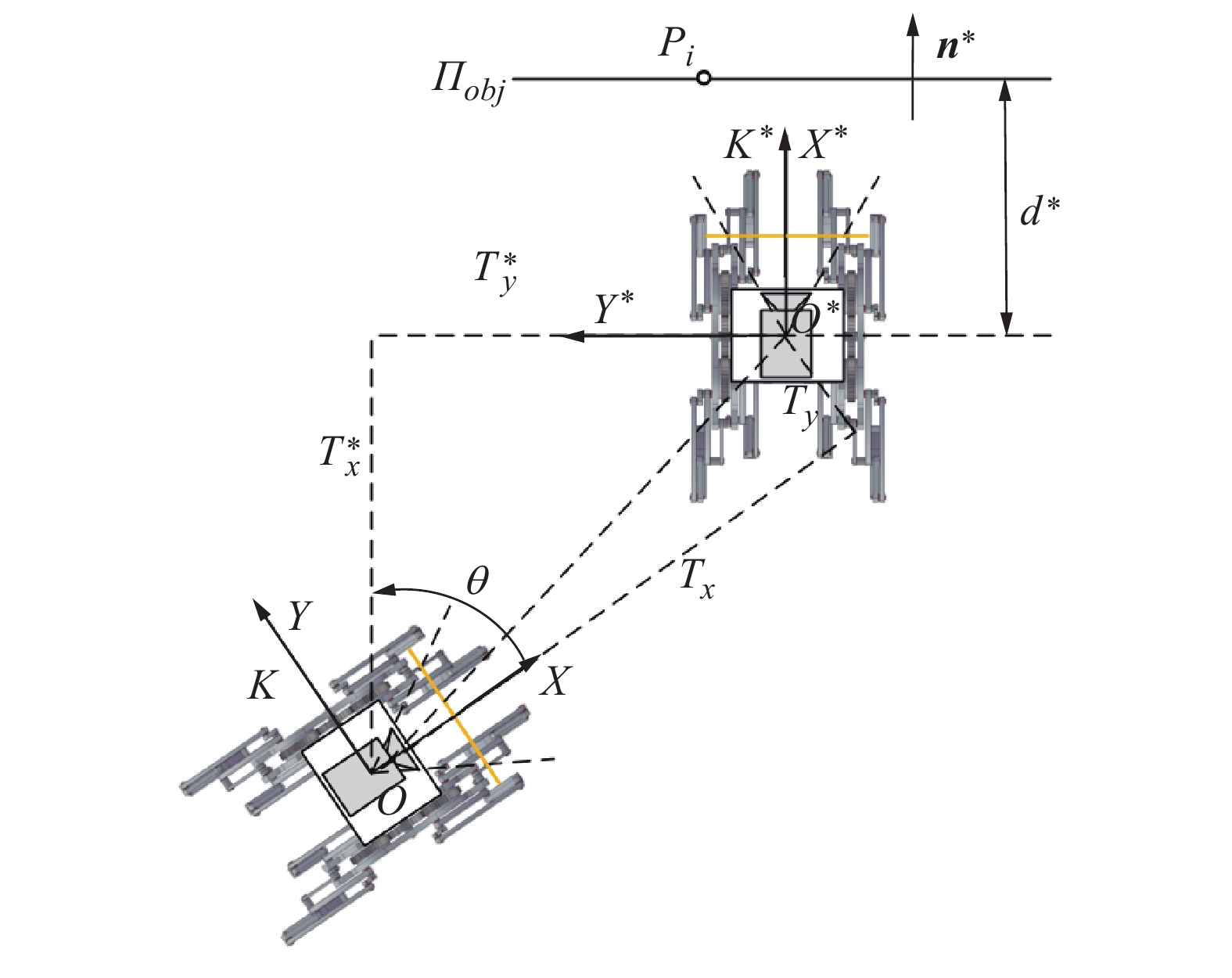
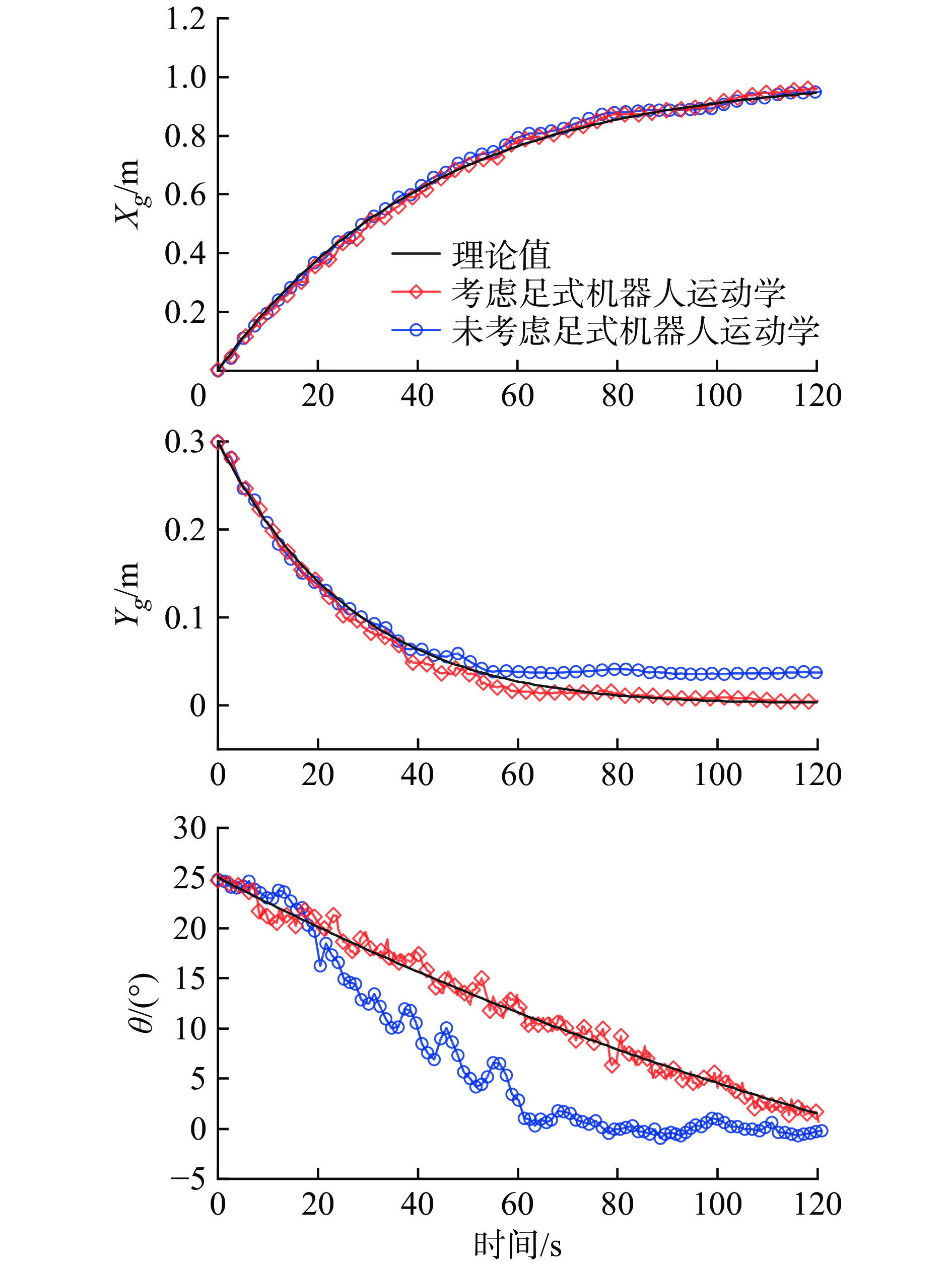
摘要: 针对一种配有单目相机的足式移动机器人,提出一种基于图像单应性的混合视觉伺服方法,利用单应性矩阵中的元素构造状态变量估计估计机器人相对位姿,使机器人在缺乏深度信息的情况下可准确到达目标位姿。相较于轮式移动机器人,在足式机器人移动过程中,足式机构的间歇性运动直接影响机器人视觉反馈过程和伺服控制系统的准确性和稳定性。为解决这一问题,通过分析足式机构运动学并建立足式机器人移动速度与电机转速的映射关系,使控制器可以更准确地调整机器人运动速度。考虑到足式机构运动对视觉反馈环节的影响,提出一种改进型自适应中值滤波算法提高位姿估计精度。伺服环节设计了滑模控制器,并采用李雅普诺夫方法证明了控制系统的稳定性。最后,利用CoppeliaSim软件搭建足式移动机器人虚拟模型,通过仿真验证了所提出控制方案的可行性与有效性。Abstract: This paper investigated a homography-based visual servoing control of a legged mobile robot, which is equipped with a fixed monocular camera. The position of the robot relative to the target object is estimated using state variables constructed withthe elements of a homography matrix. Then, the robot can accuratelyarrive at the desired position without depth information. Compared with a wheeled mobile robot, the intermittent motion of a legged mobile robot directly affects its image processing accuracy and destabilizes the visual servoing control. To address this problem, kinematics of legging mechanisms is analyzed, and the mapping between the velocity of the robot and that of a motor is established to enable the controller to adjust the movement of the legged mobile robot more accurately. To address this problem, kinematics of the legged mechanism is analyzed, and the mapping between velocities of the robot and motor speeds is established to enable the controller to adjust the movement of the legged mobile robot more accurately. Considering the influence of the movement of the legged mechanism on visual feedback, an improved adaptive median filter is proposed to improve the accuracy of the position estimation. Furthermore, a sliding mode controller is designed, and the Lyapunov-based approach is used to analyze the stability of the control system. With the aid of the CoppeliaSim software, themodel of the robot is built to verifythe effectiveness of the proposed method.
-
Key words:
- legged mobile robot /
- visual servoing control /
- homography /
- sliding mode control
-
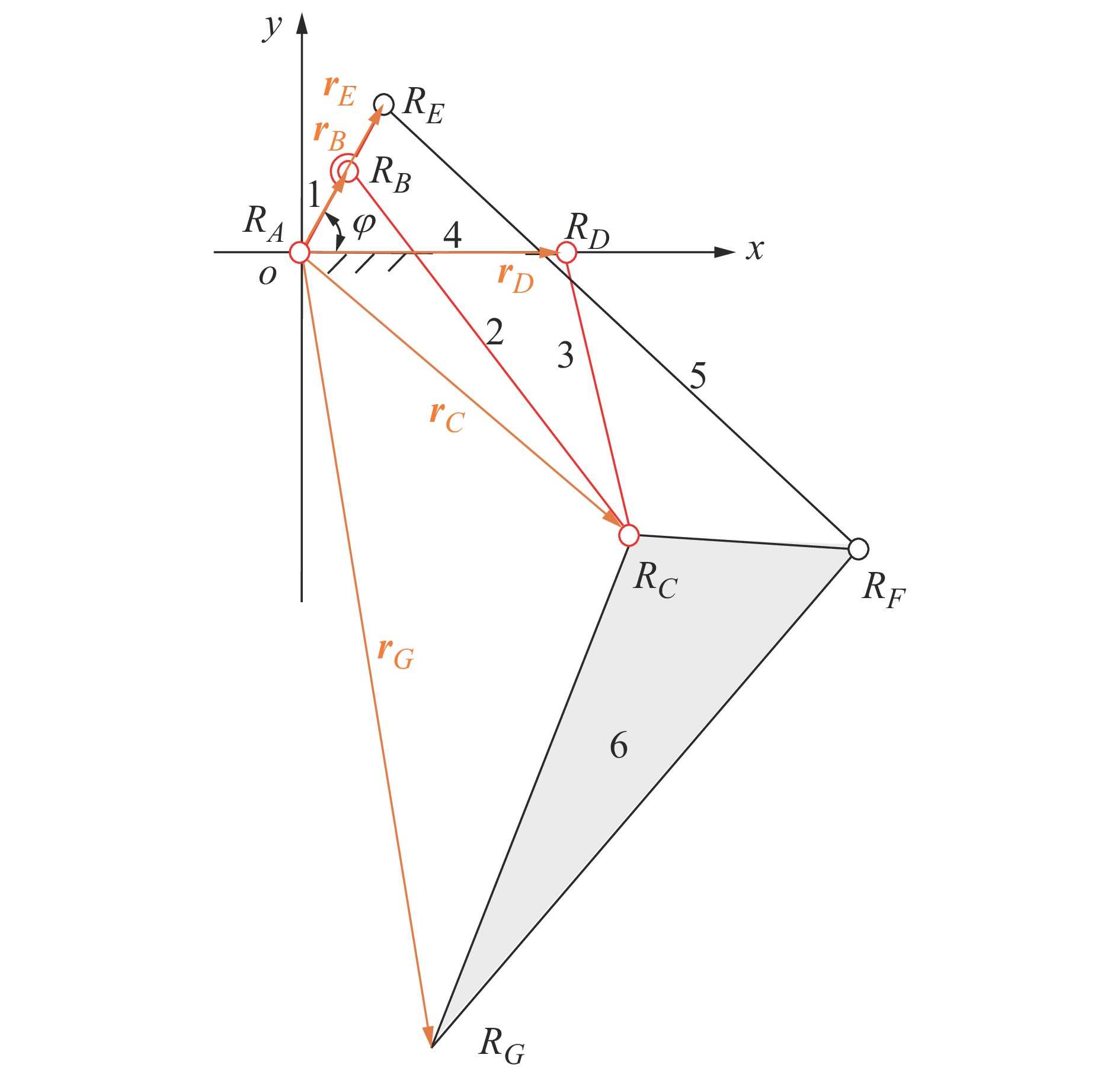
表 1 六杆机构无量纲尺度参数
杆件 符号 长度比 RARB lAB 1.00 杆1 lAE 1.50 杆2 lBC 4.80 杆3 lCD 3.00 杆4 lAD 3.00 杆5 lEF 6.75 RCRF lCF 2.50 RCRG lCG 5.75 RFRG lFG 7.00  下载: 导出CSV
下载: 导出CSV
-
[1] BROCKETT R W. Asymptotic stability and feedback stabilization[M]//MILLMANN R S. Differential Geometric Control Theory. Boston: Birkhäuser, 1983 [2] LI Z J, YANG C G, SU C Y, et al. Vision-based model predictive control for steering of a nonholonomic mobile robot[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 553-564 [3] WANG H S, GUO D J, LIANG X W, et al. Adaptive vision-based leader-follower formation control of mobile robots[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 2893-2902 doi: 10.1109/TIE.2016.2631514 [4] 张立阳, 陈奕梅. 轮式机器人视觉伺服轨迹跟踪目标控制研究[J]. 计算机仿真, 2018, 35(11): 335-339+430 doi: 10.3969/j.issn.1006-9348.2018.11.071ZHANG L Y, CHEN Y M. The visual servo track of wheeled robot tracks the target control research[J]. Computer Simulation, 2018, 35(11): 335-339+430 (in Chinese) doi: 10.3969/j.issn.1006-9348.2018.11.071 [5] 张安, 李红军, 江维, 等. 基于CANNY算子的输电线路移动作业机器人视觉定位控制[J]. 武汉纺织大学学报, 2019, 32(6): 71-76 doi: 10.3969/j.issn.2095-414X.2019.06.013ZHANG A, LI H J, JIANG W, et al. The CANNY operator based mobile operation robot vision location control for high voltage transmission line[J]. Journal of Wuhan Textile University, 2019, 32(6): 71-76 (in Chinese) doi: 10.3969/j.issn.2095-414X.2019.06.013 [6] LIANG X W, WANG H S, CHEN W D, et al. Adaptive image-based trajectory tracking control of wheeled mobile robots with an uncalibrated fixed camera[J]. IEEE Transactions on Control Systems Technology, 2015, 23(6): 2266-2282 doi: 10.1109/TCST.2015.2411627 [7] YAN F L, LI B Q, SHI W X, et al. Hybrid visual servo trajectory tracking of wheeled mobile robots[J]. IEEE Access, 2018, 6: 24291-24298 doi: 10.1109/ACCESS.2018.2829839 [8] SHI H B, XU M, HWANG K S. A fuzzy adaptive approach to decoupled visual servoing for a wheeled mobile robot[J]. IEEE Transactions on Fuzzy Systems, 2020, 28(12): 3229-3243 doi: 10.1109/TFUZZ.2019.2931219 [9] KE F, LI Z J, YANG C G. Robust tube-based predictive control for visual servoing of constrained differential-drive mobile robots[J]. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3437-3446 doi: 10.1109/TIE.2017.2756595 [10] MACKUNIS W, GANS N, PARIKH A, et al. Unified tracking and regulation visual servo control for wheeled mobile robots[J]. Asian Journal of Control, 2014, 16(3): 669-678 doi: 10.1002/asjc.826 [11] ZHANG K X, CHEN J, LI Y, et al. Unified visual servoing tracking and regulation of wheeled mobile robots with an uncalibrated camera[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(4): 1728-1739 doi: 10.1109/TMECH.2018.2836394 [12] 曹雨, 刘山. 基于单应性矩阵的移动机器人视觉伺服切换控制[J]. 控制理论与应用, 2017, 34(1): 109-119CAO Y, LIU S. Switching control for homography-based mobile robot visual servoing[J]. Control Theory & Applications, 2017, 34(1): 109-119 (in Chinese) [13] 李宝全, 徐壮, 冀东. 基于单应矩阵分解的轮式移动机器人视觉伺服轨迹跟踪[J]. 天津工业大学学报, 2020, 39(3): 61-68 doi: 10.3969/j.issn.1671-024x.2020.03.010LI B Q, XU Z, JI D. Visual servo trajectory tracking of wheeled mobile robot based on fast decomposition of homography matrix[J]. Journal of Tiangong University, 2020, 39(3): 61-68 (in Chinese) doi: 10.3969/j.issn.1671-024x.2020.03.010 [14] XU K, LIU H T, ZHU X Q, et al. Kinematic analysis of a novel planar six-bar bionic leg[C]// Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science. Krakow: Springer, 2019: 13-21 [15] LI B Q, FANG Y C, ZHANG X B. Visual servo regulation of wheeled mobile robots with an uncalibrated onboard camera[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(5): 2330-2342 doi: 10.1109/TMECH.2015.2504098 [16] LÓPEZ-NICOLÁS G, GANS N R, BHATTACHARYA S, et al. Homography-based control scheme for mobile robots with nonholonomic and field-of-view constraints[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2010, 40(4): 1115-1127 doi: 10.1109/TSMCB.2009.2034977 [17] BAY H, ESS A, TUYTELAARS T, et al. Speeded-up robust features (SURF)[J]. Computer Vision and Image Understanding, 2008, 110(3): 346-359 doi: 10.1016/j.cviu.2007.09.014 [18] RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision. Barcelona: IEEE, 2011: 2564-2571 -









 点击查看大图
点击查看大图

图(17) / 表(3)
计量
- 文章访问数: 193
- HTML全文浏览量: 116
- PDF下载量: 22
- 被引次数: 0
