Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2023 Vol. 42, No. 12
Display Method:
2023, 42(12): 1959-1966.
doi: 10.13433/j.cnki.1003-8728.20220155
 PDF 1010KB
PDF 1010KB
Abstract:
When using artificial intelligence to diagnose the fault of sucker rod pumping system, dynamometer cards describing the working condition become the object of machine learning, and the main steps are to extract the feature of dynamometer card and build the diagnosis model. The existing geometric features based on valve working position cannot directly reflect the area of dynamometer card, so a group of improved training features are proposed, and the continuous hidden Markov model (CHMM) is used to establish the diagnosis model. In order to make the initialization of parameters more reliable, the K-means clustering algorithm associated with the Gaussian mixture model is used. The diagnosis method proposed in this paper is used to test the dynamometer card set of real oil wells, the results show that this method is effective, and the improved training features and modeling methods can enhance the accuracy of fault diagnosis
When using artificial intelligence to diagnose the fault of sucker rod pumping system, dynamometer cards describing the working condition become the object of machine learning, and the main steps are to extract the feature of dynamometer card and build the diagnosis model. The existing geometric features based on valve working position cannot directly reflect the area of dynamometer card, so a group of improved training features are proposed, and the continuous hidden Markov model (CHMM) is used to establish the diagnosis model. In order to make the initialization of parameters more reliable, the K-means clustering algorithm associated with the Gaussian mixture model is used. The diagnosis method proposed in this paper is used to test the dynamometer card set of real oil wells, the results show that this method is effective, and the improved training features and modeling methods can enhance the accuracy of fault diagnosis



2023, 42(12): 1967-1971.
doi: 10.13433/j.cnki.1003-8728.20220178
Abstract:
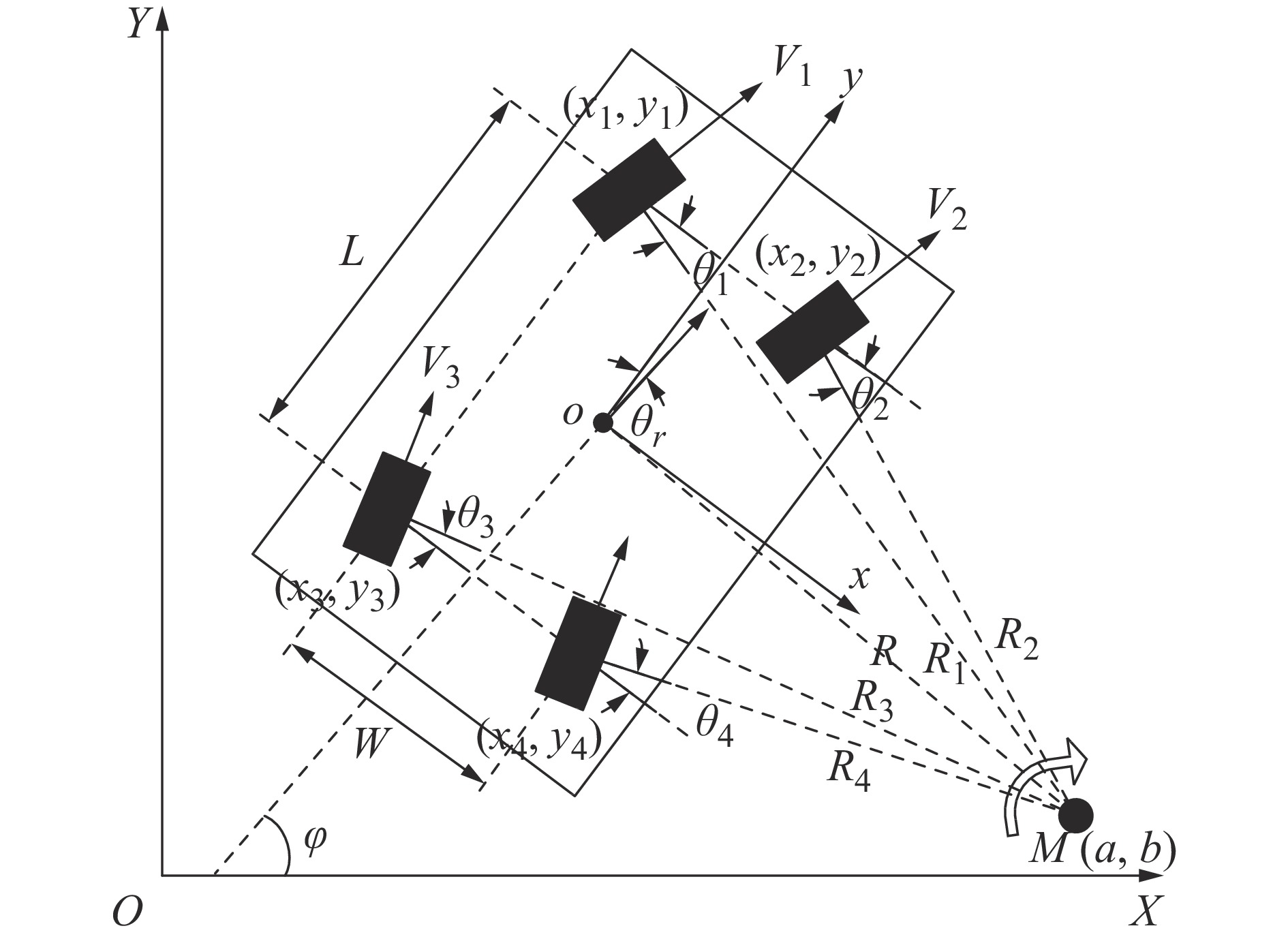
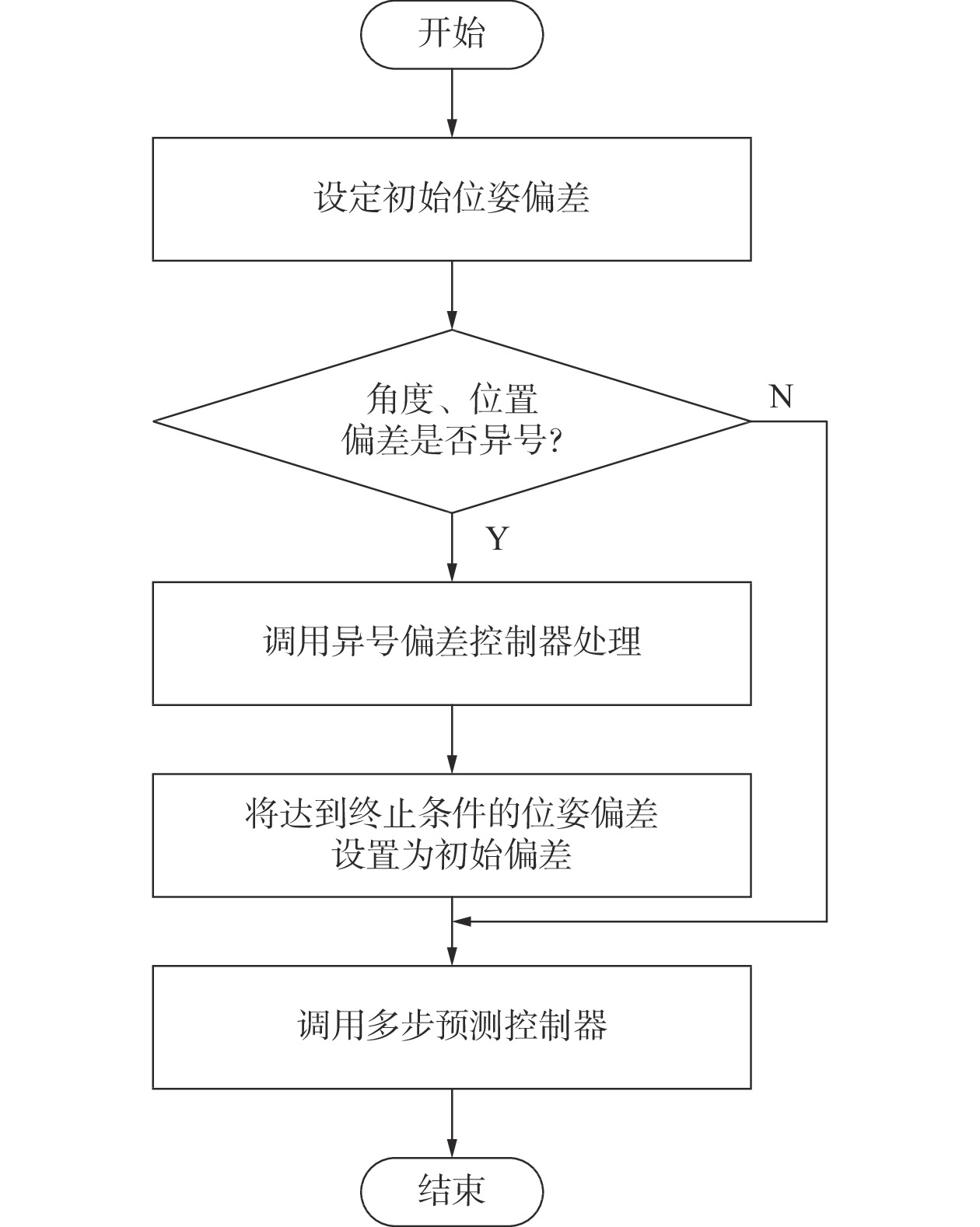
According to the path trackingcharacteristics of a four steering wheel mobile robot, themobile robot’s path tracking system was developed based on the Visual C++ platform with an industrial computer and a motion control card. Based on the configuration of the four steering wheel mobile robot, its kinematics control model was established with the velocity geometry method. On this basis, a piecewise predictive path tracking algorithm based on optimal control was proposed. It not only avoids the trial of required parameters but also reduces the maximum overshoot of distance deviation and the total number of deviation correctionsteps when the vehicle body was away from its target path. The experimental results on path tracking show that the mobile robot using thepiecewise predictive path tracking algorithm can well track the target path. Compared with the multi-step predictive control that does not usethe piecewise predictive path tracking algorithm, the piecewise predictive path tracking algorithm reduces the maximum overshoot of position deviationby 29.81%, reaching 35.563 mm, the time for deviation correction by 38.10%, reaching 13 s, its positioning accuracy being 11.292 mm and 0.51°, better meeting the positioning requirements of a four steering wheel mobile robot.
According to the path trackingcharacteristics of a four steering wheel mobile robot, themobile robot’s path tracking system was developed based on the Visual C++ platform with an industrial computer and a motion control card. Based on the configuration of the four steering wheel mobile robot, its kinematics control model was established with the velocity geometry method. On this basis, a piecewise predictive path tracking algorithm based on optimal control was proposed. It not only avoids the trial of required parameters but also reduces the maximum overshoot of distance deviation and the total number of deviation correctionsteps when the vehicle body was away from its target path. The experimental results on path tracking show that the mobile robot using thepiecewise predictive path tracking algorithm can well track the target path. Compared with the multi-step predictive control that does not usethe piecewise predictive path tracking algorithm, the piecewise predictive path tracking algorithm reduces the maximum overshoot of position deviationby 29.81%, reaching 35.563 mm, the time for deviation correction by 38.10%, reaching 13 s, its positioning accuracy being 11.292 mm and 0.51°, better meeting the positioning requirements of a four steering wheel mobile robot.




2023, 42(12): 1972-1976.
doi: 10.13433/j.cnki.1003-8728.20220165
Abstract:
Aiming at the low sensitivity of rolling bearing performance degradation index and difficulty in determining the starting point of degradation, an early fault diagnosis method of bearing coupling autocorrelation function and gray relational degree (AF-GRD) is proposed. Firstly, the autocorrelation series function is obtained based on the Hilbert transform and the AF by processing the life data sample group of bearing. Then, the first set of data in the early stage of bearing operation was extracted as a reference sample, the GRD between the remaining samples and the reference sample was calculated and the bearing performance degradation index was constructed. Finally, the time period of the early fault of bearing is determined according to the change in index and health threshold, the data sample of this period are intercepted for Hilbert envelope spectrum analysis to realize early fault diagnosis. Using the laboratory database to complete early fault diagnosis of the bearing, the results show that AF-GRD has high sensitivity and can detect the early degradation of bearings.
Aiming at the low sensitivity of rolling bearing performance degradation index and difficulty in determining the starting point of degradation, an early fault diagnosis method of bearing coupling autocorrelation function and gray relational degree (AF-GRD) is proposed. Firstly, the autocorrelation series function is obtained based on the Hilbert transform and the AF by processing the life data sample group of bearing. Then, the first set of data in the early stage of bearing operation was extracted as a reference sample, the GRD between the remaining samples and the reference sample was calculated and the bearing performance degradation index was constructed. Finally, the time period of the early fault of bearing is determined according to the change in index and health threshold, the data sample of this period are intercepted for Hilbert envelope spectrum analysis to realize early fault diagnosis. Using the laboratory database to complete early fault diagnosis of the bearing, the results show that AF-GRD has high sensitivity and can detect the early degradation of bearings.






2023, 42(12): 1977-1985.
doi: 10.13433/j.cnki.1003-8728.20220175
Abstract:
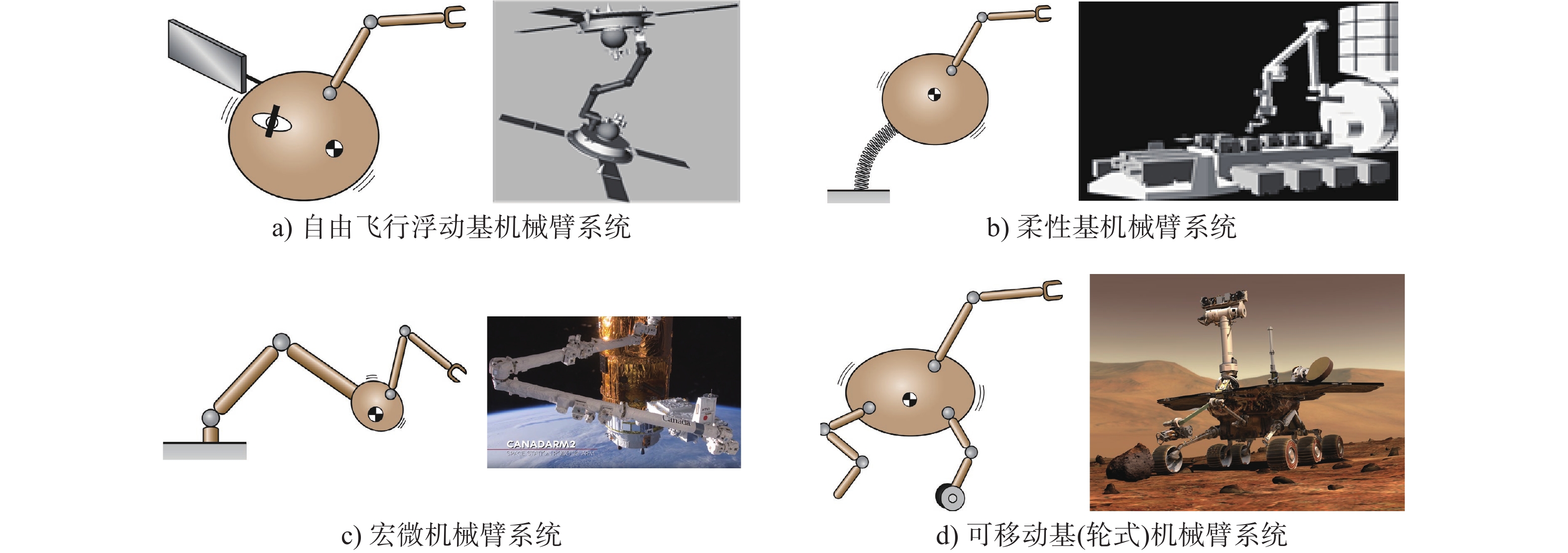
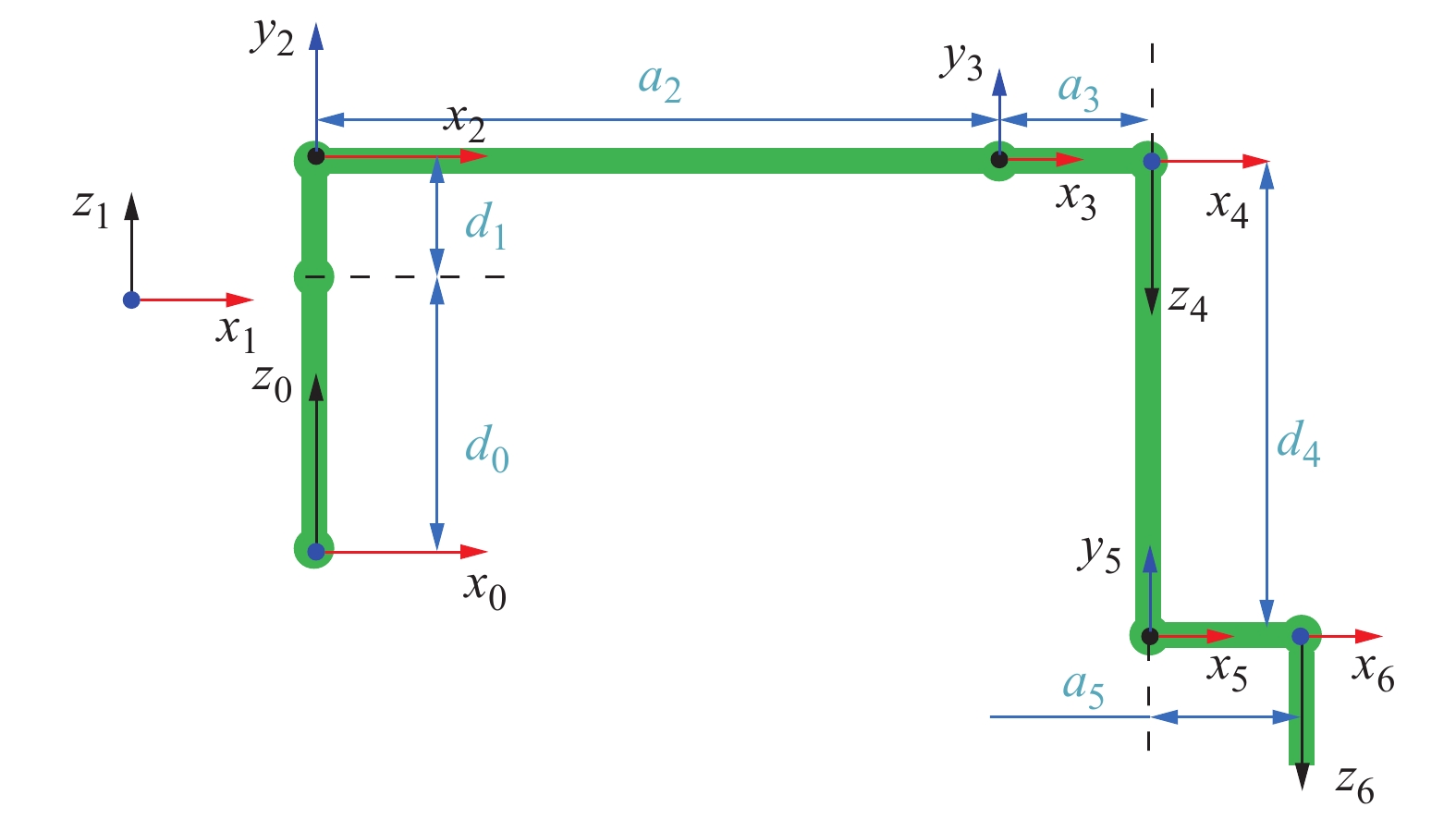
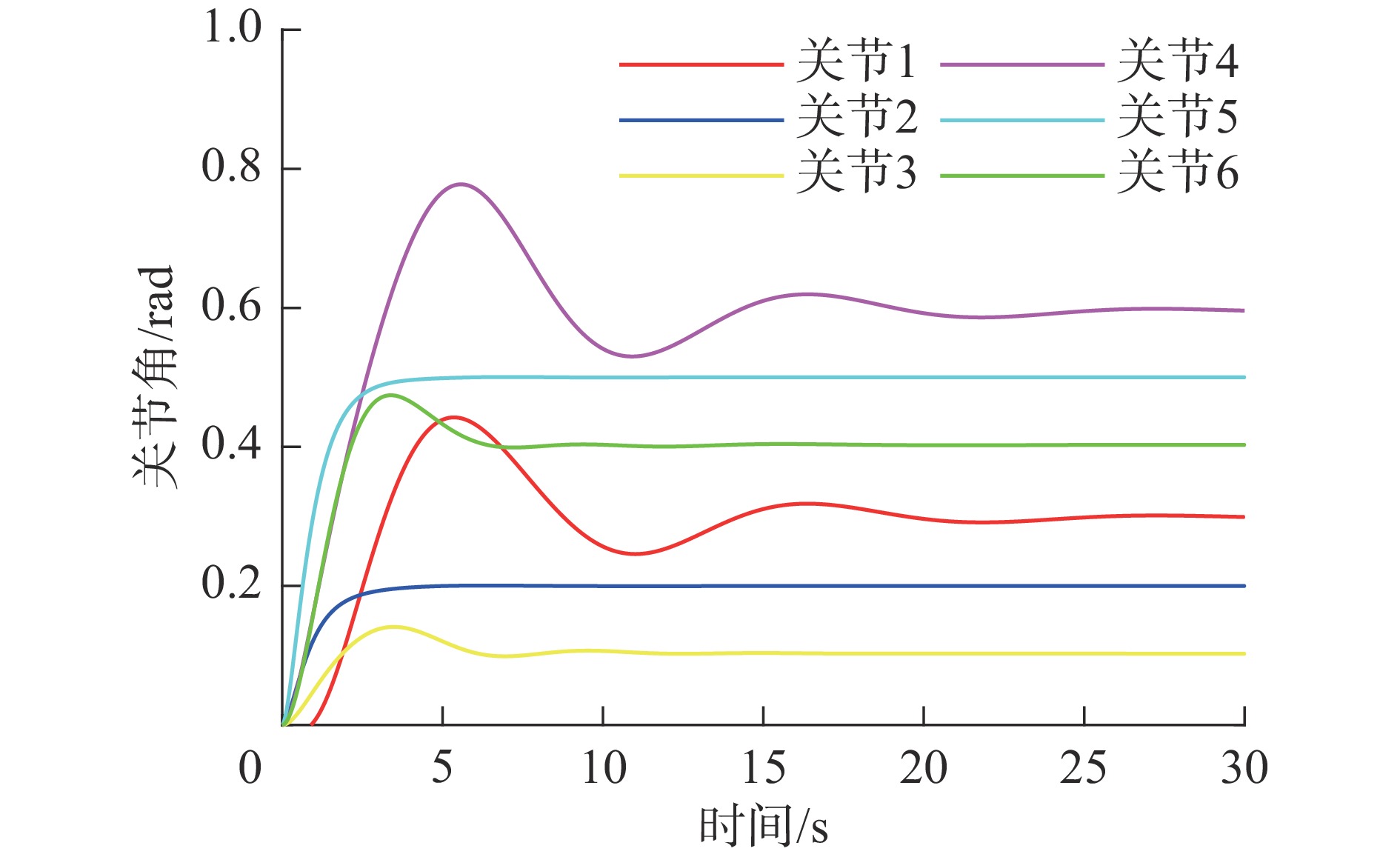
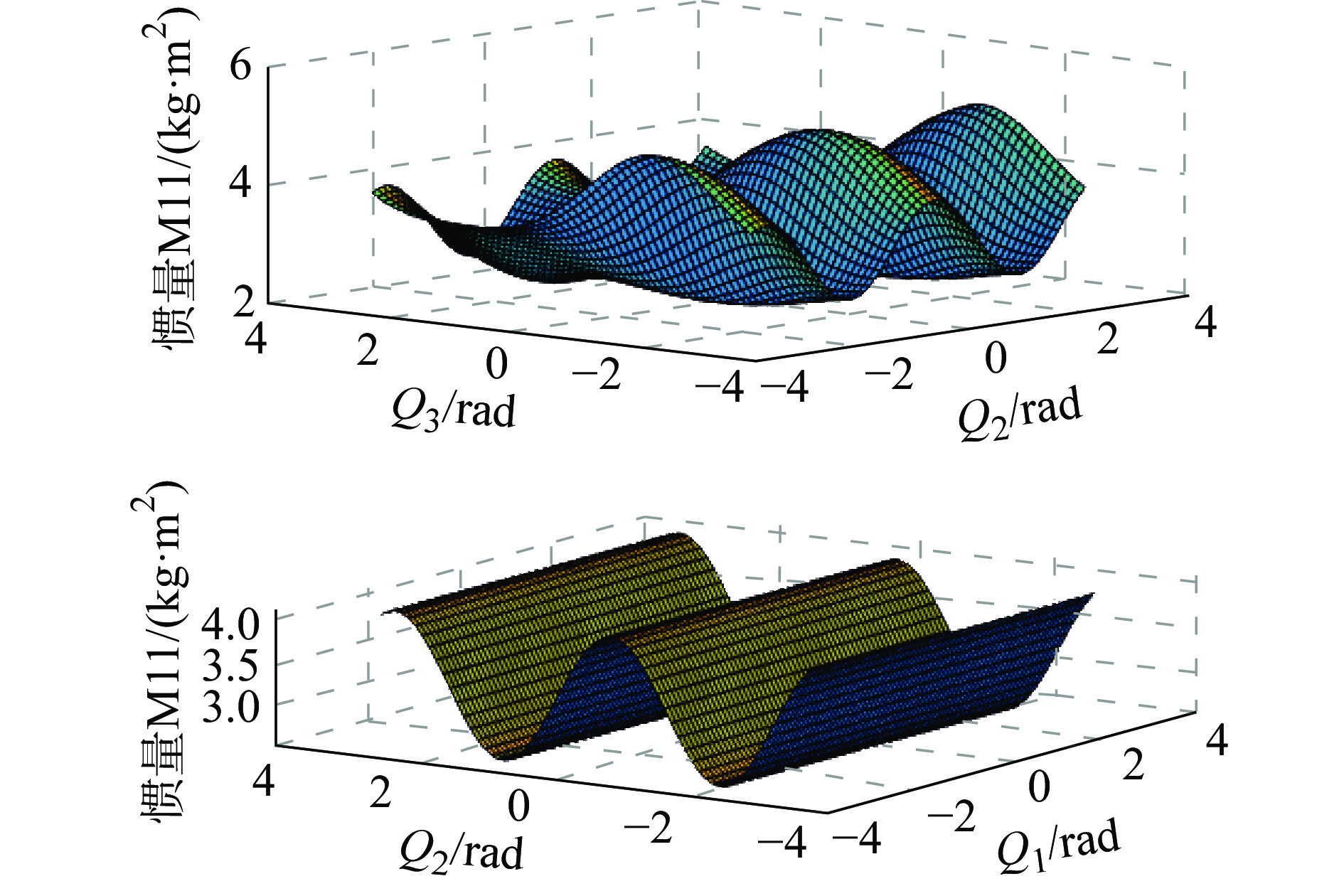
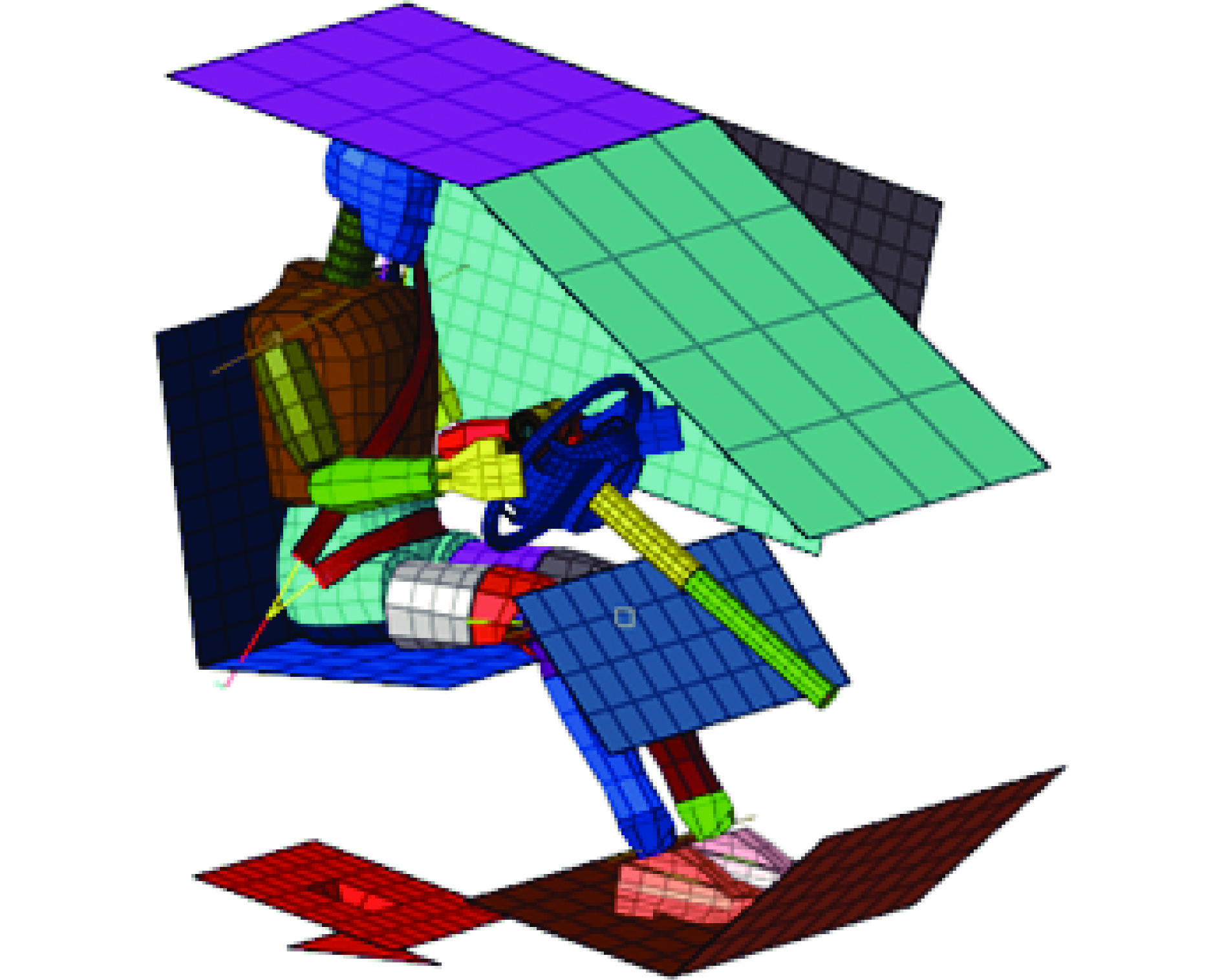
In the process of space task, the dynamic coupling phenomenon in the floating base manipulator system makes the adjustment of the base posture and the positioning and control of the end of the manipulator more complex. In this paper, considering the common characteristics of various space-based manipulator systems, we focus on the coupling law between the manipulator and the floating base, establish a unified coupling dynamic model, and utilize the non-integrity and coupling characteristics of the whole system to design the coordinated control law for a specific system. Then, by controlling the active motion of the joint of the manipulator, the pose of the base can be controlled and the task at the end of the manipulator can be free. Finally, a simulation experiment is set up to verify the effectiveness of the proposed method. The results show that the coordinated motion of the floating base and the end of the manipulator can be achieved by reasonably setting the control parameters in the presence of solution space.
In the process of space task, the dynamic coupling phenomenon in the floating base manipulator system makes the adjustment of the base posture and the positioning and control of the end of the manipulator more complex. In this paper, considering the common characteristics of various space-based manipulator systems, we focus on the coupling law between the manipulator and the floating base, establish a unified coupling dynamic model, and utilize the non-integrity and coupling characteristics of the whole system to design the coordinated control law for a specific system. Then, by controlling the active motion of the joint of the manipulator, the pose of the base can be controlled and the task at the end of the manipulator can be free. Finally, a simulation experiment is set up to verify the effectiveness of the proposed method. The results show that the coordinated motion of the floating base and the end of the manipulator can be achieved by reasonably setting the control parameters in the presence of solution space.










2023, 42(12): 1986-1995.
doi: 10.13433/j.cnki.1003-8728.20220158
Abstract:
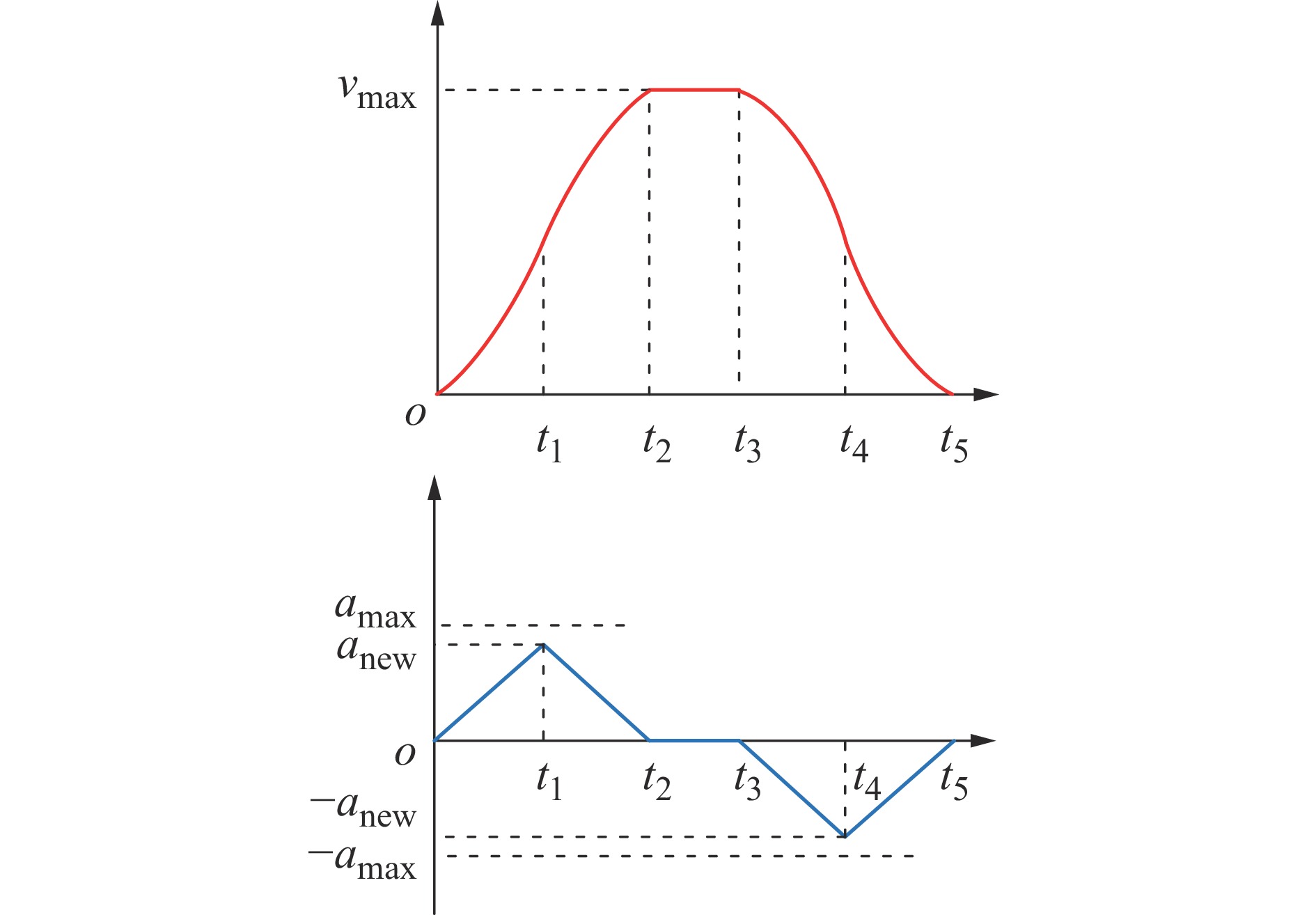
According to the process and characteristics of the gangue sorting, a grasping trajectory planning scheme for the cable-driven gangue sorting robot was proposed. The kinematic model of the cable-driven gangue sorting robot was firstly expounded, and the accuracy of the model was verified by simulation, which provided a basis for judging whether the trajectory of the end grab conforms to the change rule of the cable length. According to the characteristics of synchronous movement of the gangues and belt conveyor, the position of the gangue bin and the workspace geometric center, the grasping trajectory of the end grab was then planned four sections, namely as start, preparation, gangue grab, and gangue disposal sections. According to the different motion characteristics of the above sections, the S-type velocity curve, quintic polynomial and the combination of both were used to plan the motion of the end grab. The planned trajectory scheme was finally simulated and analyzed. The results showed that the trajectory, velocity and acceleration of the end grab were continuous, the change of cable length was smooth and continuous, and the trajectory parameters determined by the above method could adapt to the different distribution of gangue on the belt conveyor.
According to the process and characteristics of the gangue sorting, a grasping trajectory planning scheme for the cable-driven gangue sorting robot was proposed. The kinematic model of the cable-driven gangue sorting robot was firstly expounded, and the accuracy of the model was verified by simulation, which provided a basis for judging whether the trajectory of the end grab conforms to the change rule of the cable length. According to the characteristics of synchronous movement of the gangues and belt conveyor, the position of the gangue bin and the workspace geometric center, the grasping trajectory of the end grab was then planned four sections, namely as start, preparation, gangue grab, and gangue disposal sections. According to the different motion characteristics of the above sections, the S-type velocity curve, quintic polynomial and the combination of both were used to plan the motion of the end grab. The planned trajectory scheme was finally simulated and analyzed. The results showed that the trajectory, velocity and acceleration of the end grab were continuous, the change of cable length was smooth and continuous, and the trajectory parameters determined by the above method could adapt to the different distribution of gangue on the belt conveyor.










2023, 42(12): 1996-2002.
doi: 10.13433/j.cnki.1003-8728.20220170
Abstract:
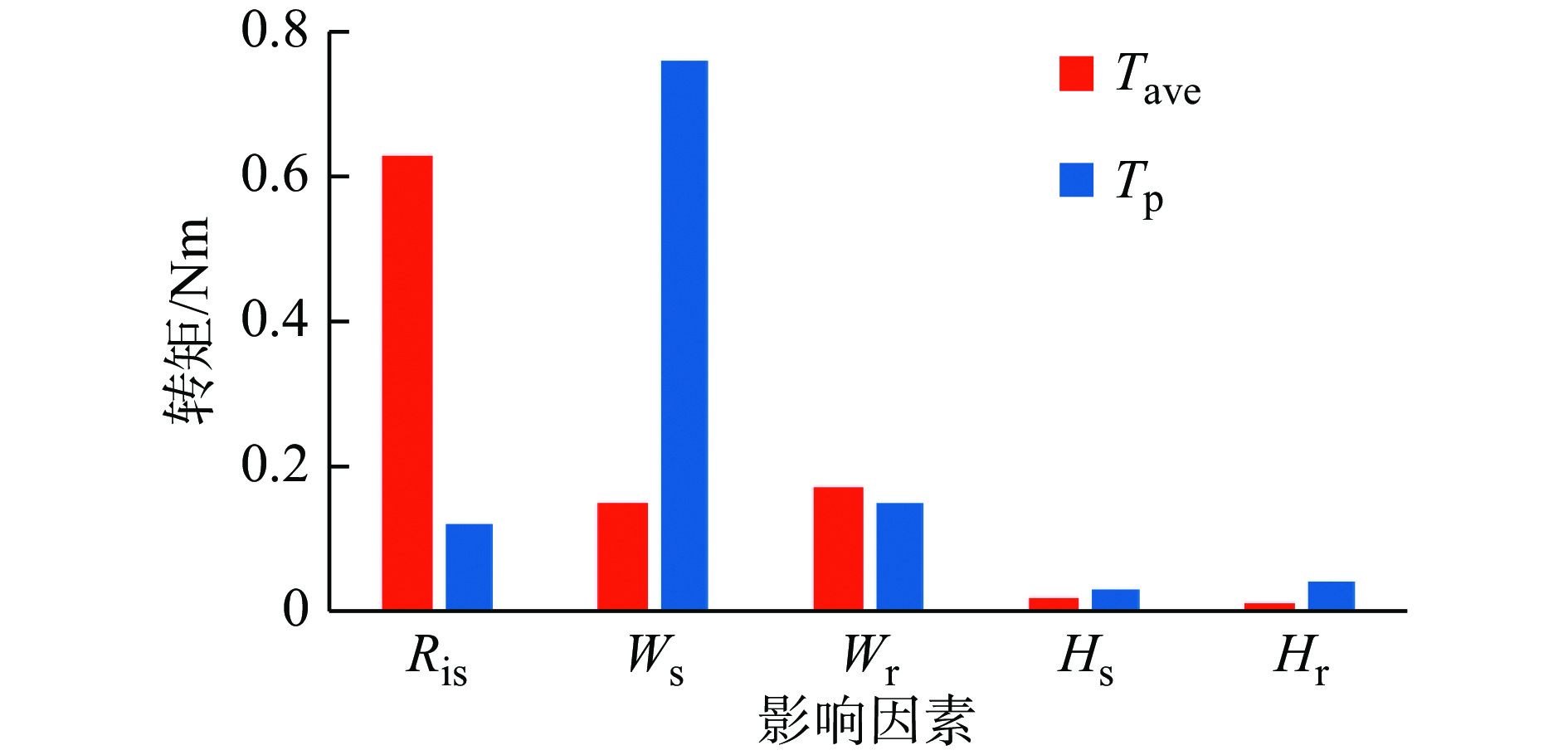
Permanent magnet vernier motor (PMVM) has the advantages of low speed and high torque operation, direct drive and so on. The main goal of optimization is reducing torque ripple while ensuring torque density in this type of motor. Aiming at the internal rotor permanent magnet vernier motor, the optimization factors were determined with the sensitivity analysis, then the multi-target orthogonal optimization and particle swarm optimization (PSO) are adoptedto optimize the rotor permanent magnet cursor motor, and the method of orthogonal-particle swarm optimization algorithmis proposed to improve the orthogonal optimization precision and the computationally complex problems in the particle swarm optimizationis solved. The three optimization results are simulated and compared with the finite element analysis. The results show that the present method solves the insufficient accuracy of the orthogonal optimization and the large computation of the particle swarm optimization. After optimization, the electromagnetic torque of the motor increases by 8.5% and the torque ripple decreases by 8.23%, which improves the performance of the motor.
Permanent magnet vernier motor (PMVM) has the advantages of low speed and high torque operation, direct drive and so on. The main goal of optimization is reducing torque ripple while ensuring torque density in this type of motor. Aiming at the internal rotor permanent magnet vernier motor, the optimization factors were determined with the sensitivity analysis, then the multi-target orthogonal optimization and particle swarm optimization (PSO) are adoptedto optimize the rotor permanent magnet cursor motor, and the method of orthogonal-particle swarm optimization algorithmis proposed to improve the orthogonal optimization precision and the computationally complex problems in the particle swarm optimizationis solved. The three optimization results are simulated and compared with the finite element analysis. The results show that the present method solves the insufficient accuracy of the orthogonal optimization and the large computation of the particle swarm optimization. After optimization, the electromagnetic torque of the motor increases by 8.5% and the torque ripple decreases by 8.23%, which improves the performance of the motor.







2023, 42(12): 2003-2010.
doi: 10.13433/j.cnki.1003-8728.20220183
Abstract:
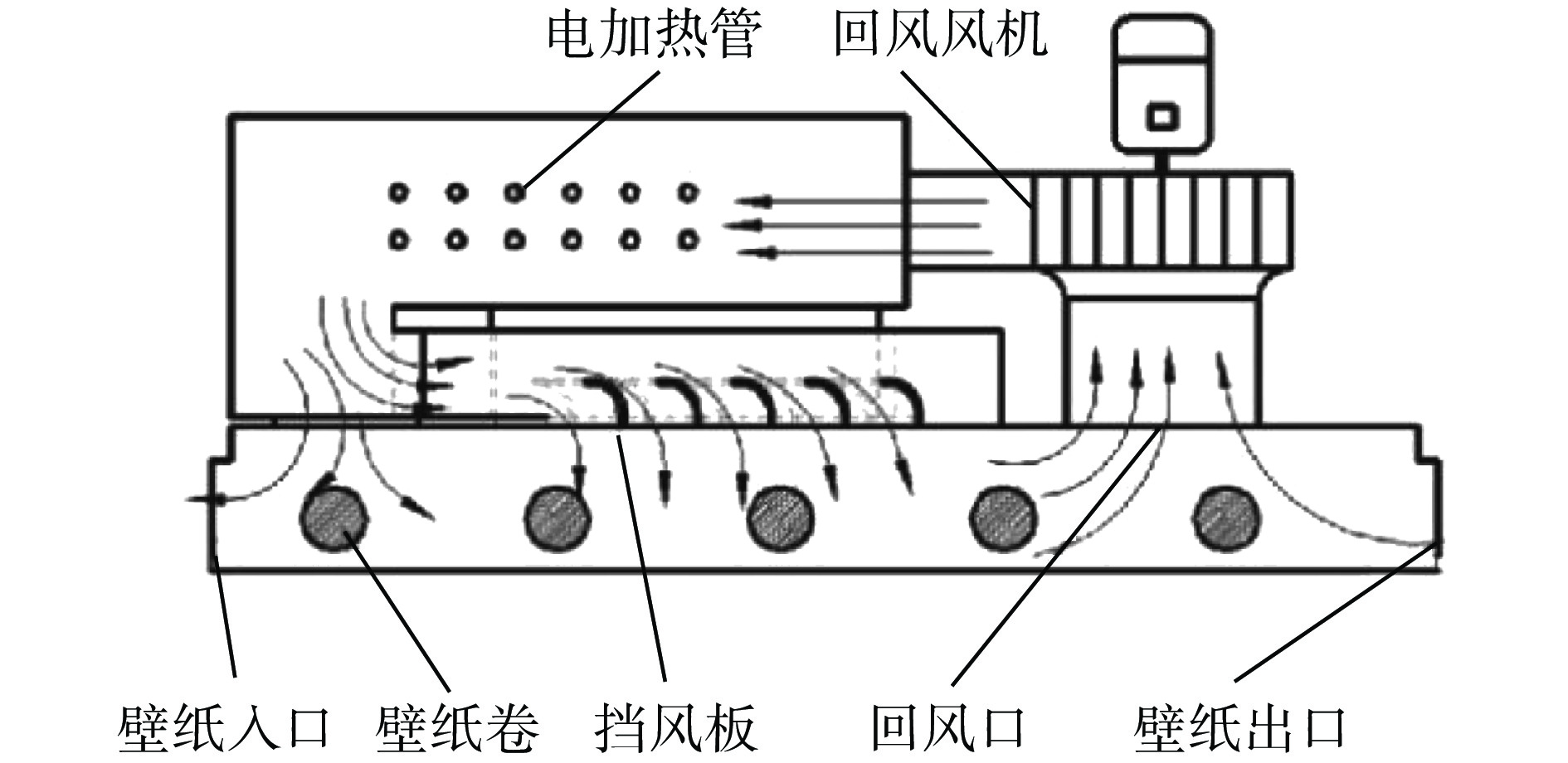
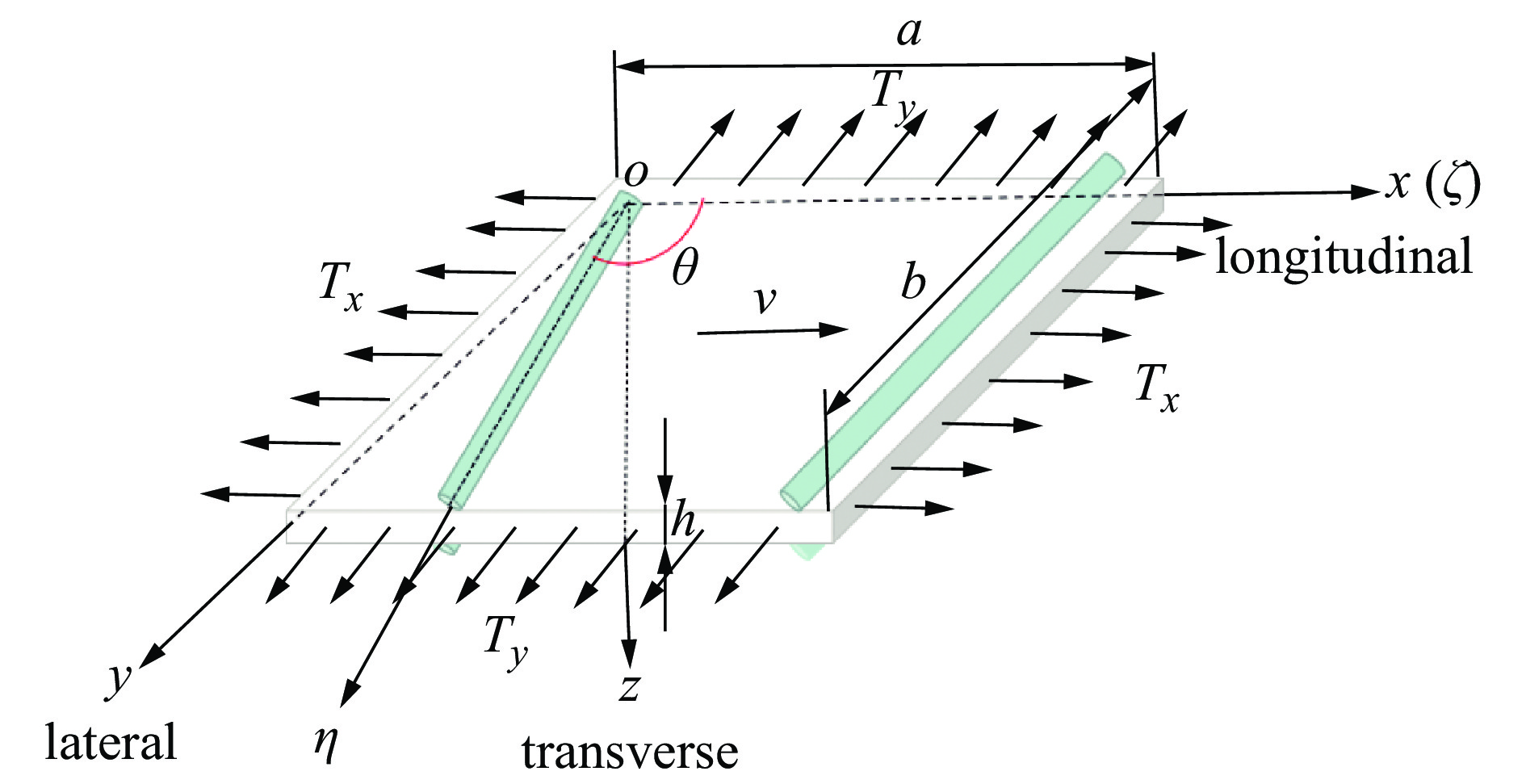
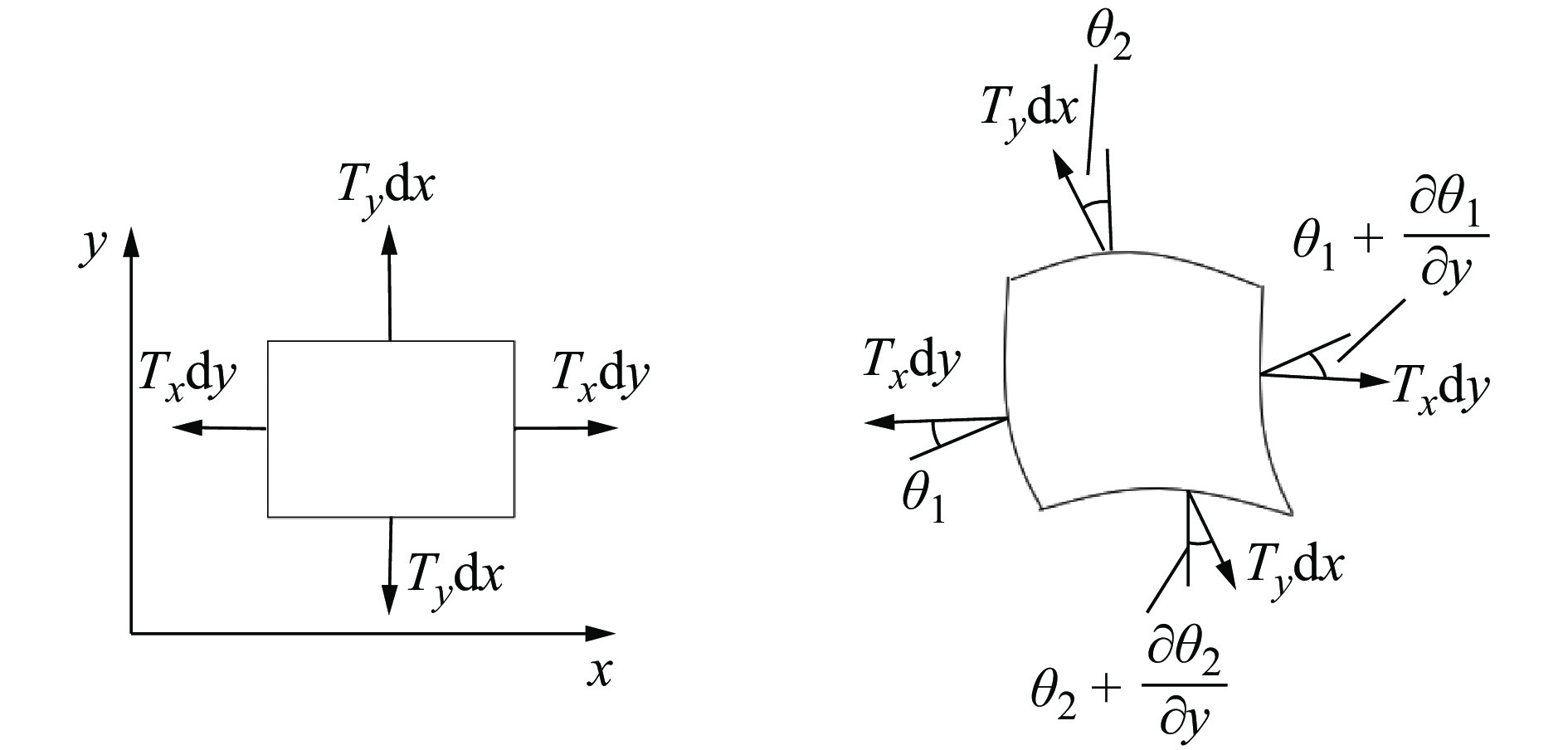
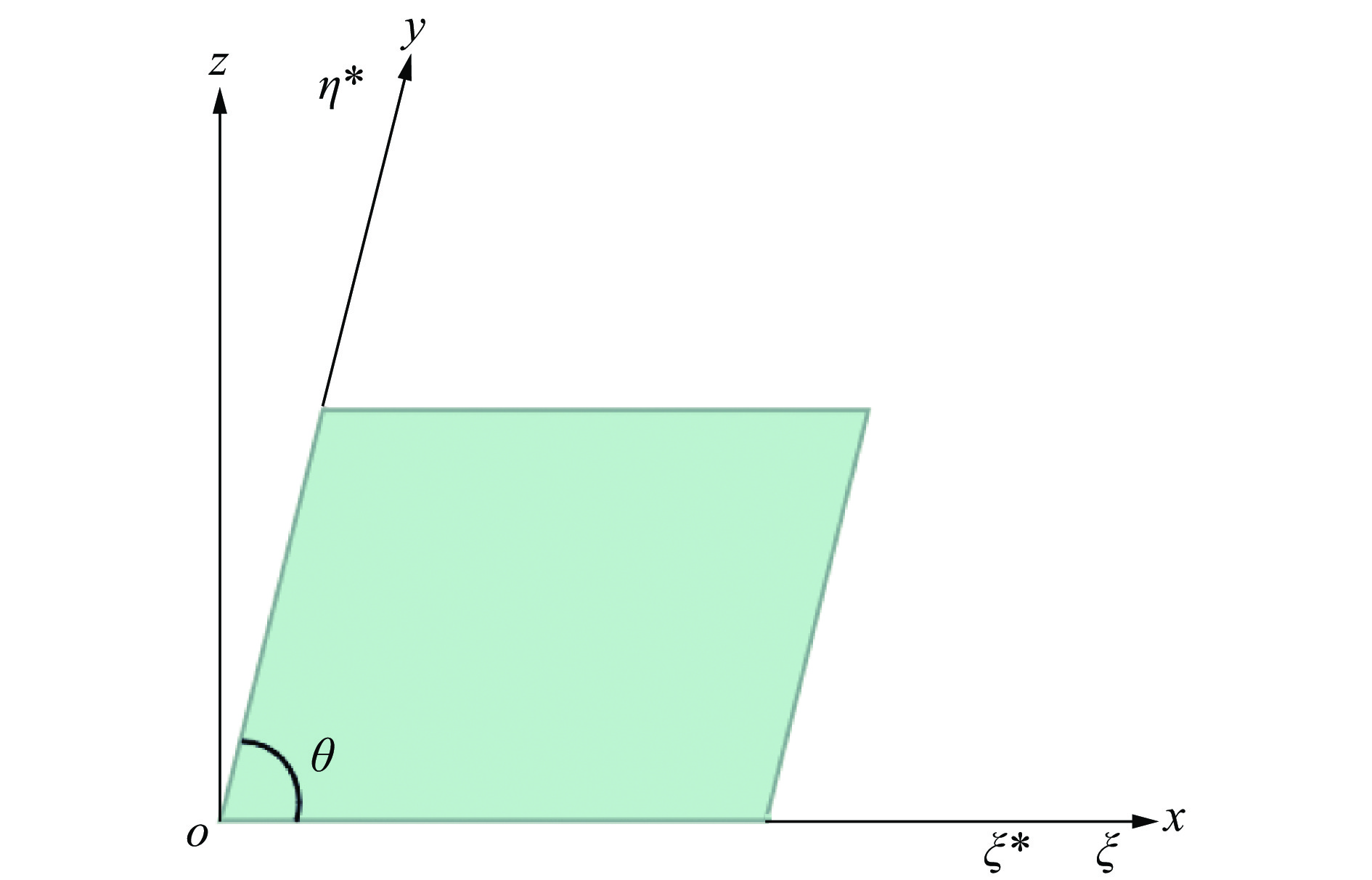
In the production process of TPU film, there are inclined supporting guide rollers to guide and support the film; In addition, a heating and drying system is required for instant drying. These processes inevitably cause the transverse vibration of the TPU film, thereby affecting the film′s preparation precision and quality. Based on D'Alembert principle, the dynamic model and heat conduction equation of TPU film with motion velocity are established. After decoupling, the vibration differential equation of TPU film with thermoelastic coupling coefficient is obtained; The motion differential equation of TPU film with oblique support was established; The complex characteristic motion equation is obtained by using differential quadrature method. The relationship between the motion complex frequency and dimensionless velocity, inclined support angle, thermoelastic coupling coefficient, aspect ratio and tension ratio is studied. The influence of each parameter on the vibration stability of motion TPU film is analyzed quantitatively, so as to improve the coating accuracy and preparation quality of automobile TPU film.
In the production process of TPU film, there are inclined supporting guide rollers to guide and support the film; In addition, a heating and drying system is required for instant drying. These processes inevitably cause the transverse vibration of the TPU film, thereby affecting the film′s preparation precision and quality. Based on D'Alembert principle, the dynamic model and heat conduction equation of TPU film with motion velocity are established. After decoupling, the vibration differential equation of TPU film with thermoelastic coupling coefficient is obtained; The motion differential equation of TPU film with oblique support was established; The complex characteristic motion equation is obtained by using differential quadrature method. The relationship between the motion complex frequency and dimensionless velocity, inclined support angle, thermoelastic coupling coefficient, aspect ratio and tension ratio is studied. The influence of each parameter on the vibration stability of motion TPU film is analyzed quantitatively, so as to improve the coating accuracy and preparation quality of automobile TPU film.







2023, 42(12): 2011-2020.
doi: 10.13433/j.cnki.1003-8728.20220157
Abstract:
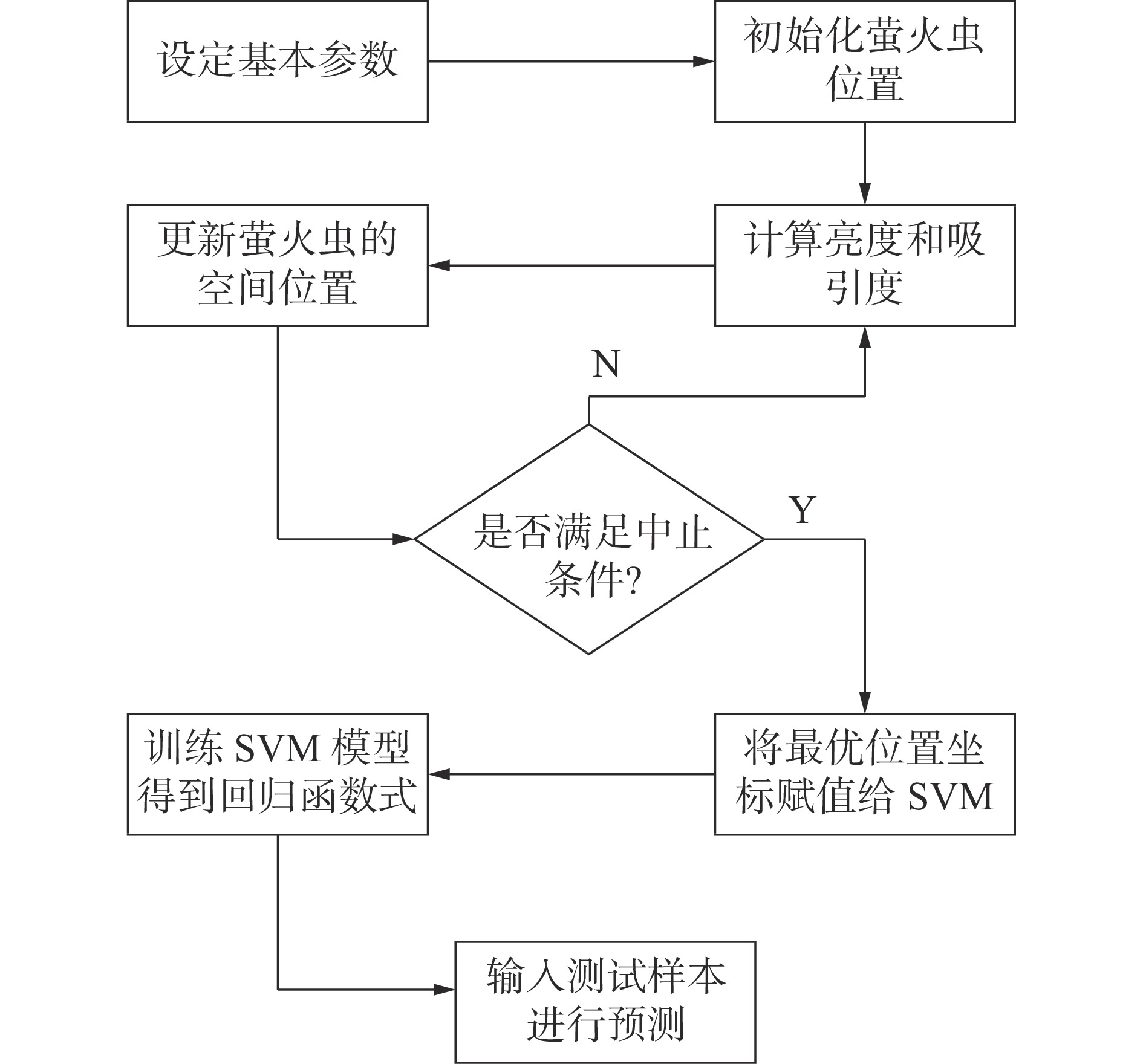
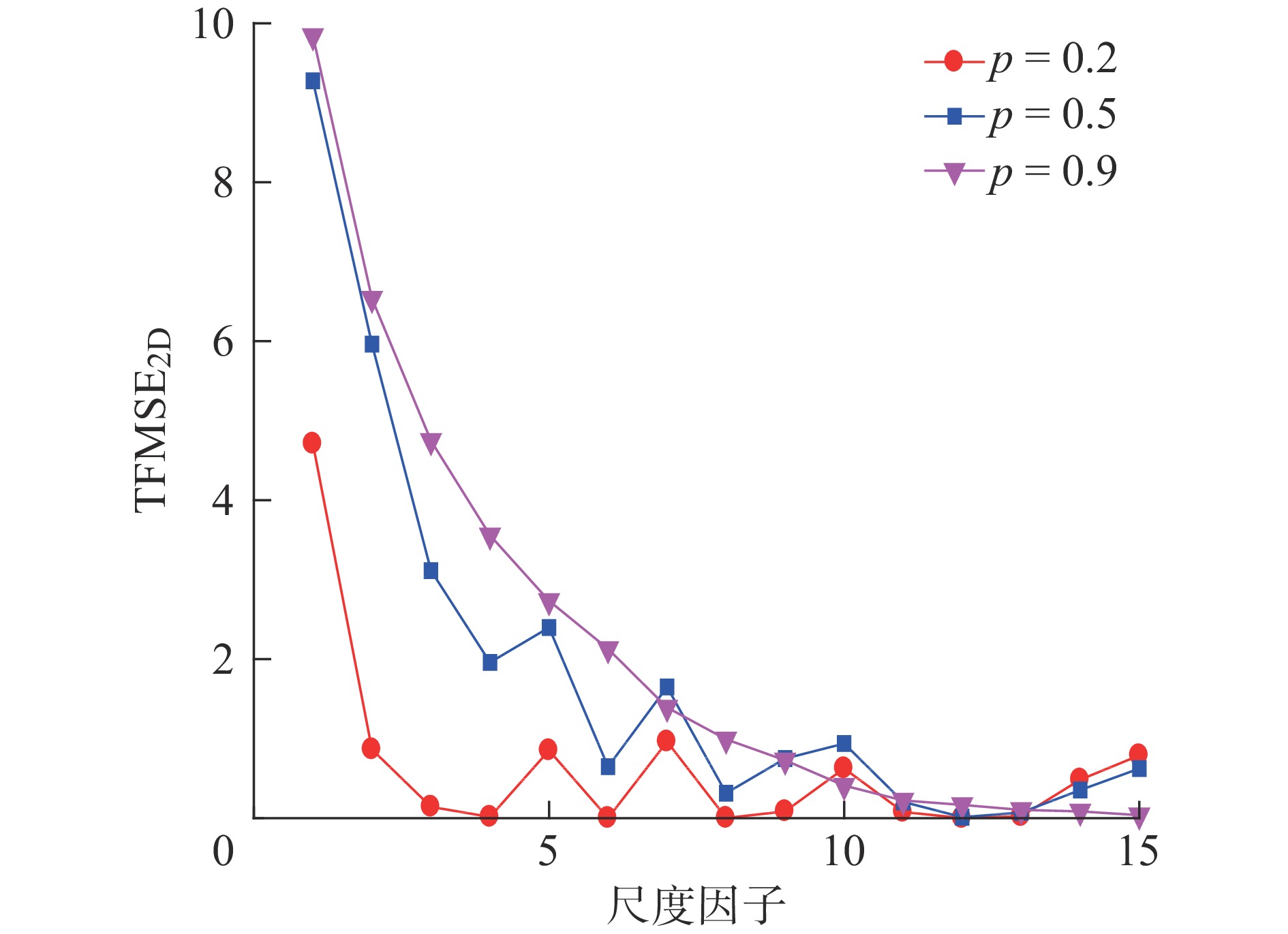
Multi-scale entropy is an effective nonlinear dynamic method to characterize the complexity and irregularity of one-dimensional vibration signal, but it only considers the time-domain complexity of the signal and ignores the frequency-domain information. For comprehensive utilization of the vibration signal frequency domain information and measure of the complexity of the time-frequency distribution characteristics, the two-dimensional multi-scale entropy is introduced into the fault diagnosis of rolling bearings, and a new rolling bearing fault diagnosis method based on two-dimensional time-frequency multi-scale entropy (TFMSE2D) and firefly algorithm optimization support vector machine is proposed. Firstly, a one-dimensional time series is transformed into a time-frequency image by continuous wavelet transform. Secondly, the TFMSE2D of time-frequency image is calculated. Then, the TFMSE2D is input into the firefly optimized support vector machine for classification and prediction. Finally, through the rolling bearing experiment data verify the validity of the proposed method. The results show that the proposed method can accurately identify roller bearing fault type and fault degree.
Multi-scale entropy is an effective nonlinear dynamic method to characterize the complexity and irregularity of one-dimensional vibration signal, but it only considers the time-domain complexity of the signal and ignores the frequency-domain information. For comprehensive utilization of the vibration signal frequency domain information and measure of the complexity of the time-frequency distribution characteristics, the two-dimensional multi-scale entropy is introduced into the fault diagnosis of rolling bearings, and a new rolling bearing fault diagnosis method based on two-dimensional time-frequency multi-scale entropy (TFMSE2D) and firefly algorithm optimization support vector machine is proposed. Firstly, a one-dimensional time series is transformed into a time-frequency image by continuous wavelet transform. Secondly, the TFMSE2D of time-frequency image is calculated. Then, the TFMSE2D is input into the firefly optimized support vector machine for classification and prediction. Finally, through the rolling bearing experiment data verify the validity of the proposed method. The results show that the proposed method can accurately identify roller bearing fault type and fault degree.

















2023, 42(12): 2021-2029.
doi: 10.13433/j.cnki.1003-8728.20220176
Abstract:
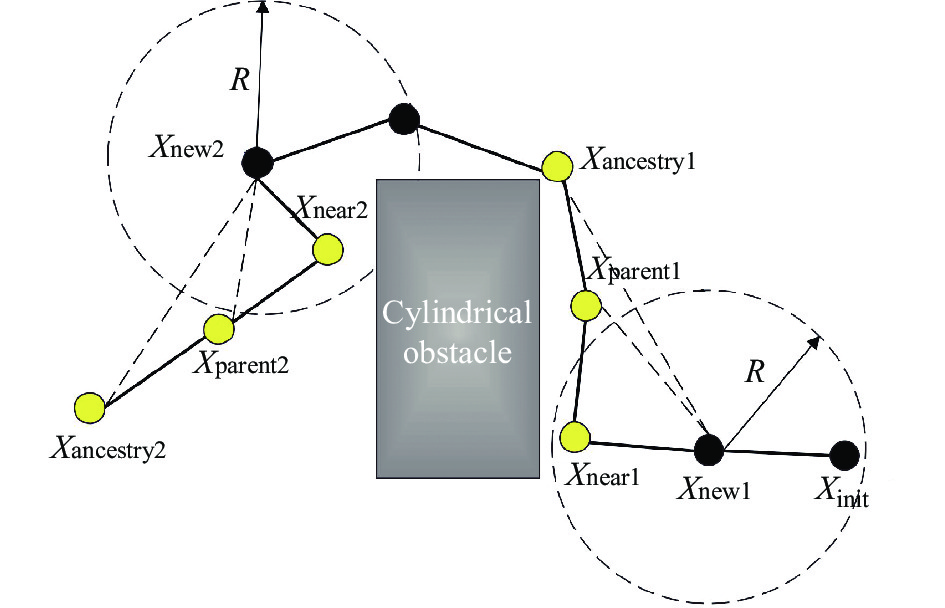
The standard rapidly-exploring random tree algorithm for path planning takes a long time and has poor path quality. Therefore, an improved rapidly-exploring random tree algorithm is proposed. Firstly, redundant sections are eliminated by using the re-selecting parent node link strategy, and redundant nodes are eliminated with the regional exclusion mechanism to shorten the planning path and time. Secondly, the line segment angle limit and the evaluation function are used to improve the path quality. Finally, the cubic Hermite curve is used to smooth the path. The simulation of a deep-sea manipulator verifies the effectiveness of the improved rapidly-exploring random tree algorithm.
The standard rapidly-exploring random tree algorithm for path planning takes a long time and has poor path quality. Therefore, an improved rapidly-exploring random tree algorithm is proposed. Firstly, redundant sections are eliminated by using the re-selecting parent node link strategy, and redundant nodes are eliminated with the regional exclusion mechanism to shorten the planning path and time. Secondly, the line segment angle limit and the evaluation function are used to improve the path quality. Finally, the cubic Hermite curve is used to smooth the path. The simulation of a deep-sea manipulator verifies the effectiveness of the improved rapidly-exploring random tree algorithm.












2023, 42(12): 2030-2039.
doi: 10.13433/j.cnki.1003-8728.20230331
Abstract:
In order to solve the problems of long manual polishing time and high labor intensity in the polishing process of connecting rod mold, a set of hybrid robot flexible polishing system was established. The material removal model considering the wear of polishing tools is established on this system, which can well predict the material removal amount under certain polishing parameters. Using the combination of UG and teaching methods to generate the processing trajectory. According to the control needs of the mold polishing force, a pneumatic control system is established, and the self-designed floating constant force polishing spindle combined with the PID control algorithm realizes the constant force polishing. Finally, the polishing experiment of automobile connecting rod mold is carried out on the flexible polishing system. The experimental results show that the flexible polishing system can better complete the polishing task of connecting rod mold and obtain better polishing effect.
In order to solve the problems of long manual polishing time and high labor intensity in the polishing process of connecting rod mold, a set of hybrid robot flexible polishing system was established. The material removal model considering the wear of polishing tools is established on this system, which can well predict the material removal amount under certain polishing parameters. Using the combination of UG and teaching methods to generate the processing trajectory. According to the control needs of the mold polishing force, a pneumatic control system is established, and the self-designed floating constant force polishing spindle combined with the PID control algorithm realizes the constant force polishing. Finally, the polishing experiment of automobile connecting rod mold is carried out on the flexible polishing system. The experimental results show that the flexible polishing system can better complete the polishing task of connecting rod mold and obtain better polishing effect.


















2023, 42(12): 2040-2046.
doi: 10.13433/j.cnki.1003-8728.20220167
Abstract:
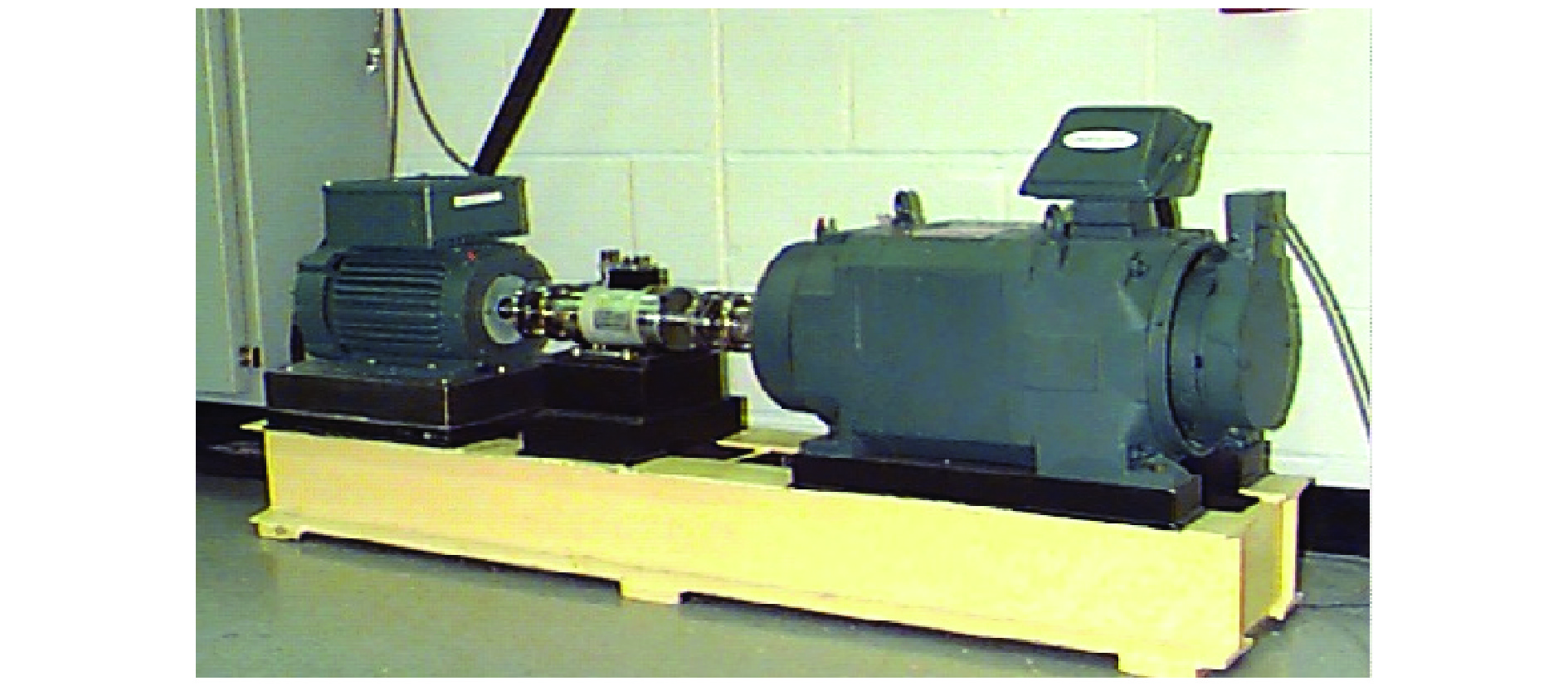
When rolling bearings operate in rotating mechanical equipment, complex vibration signals will be measured, which can reflect equipment′s operation condition. The existing signal processing methods of rolling bearings mostly use single channel information, which can not reflect the fault state of the whole section. In this paper, a fault feature extraction method based on full vector improved continuous harmonic wavelet packet transform is proposed. Firstly, two orthogonal sensors are used to realize the dual channel vibration signal acquisition on a certain section of rolling bearing. Secondly, the collected homologous dual channel signals are fused with full vector spectrum technology. Then, the fused signal is decomposed by improved continuous harmonic wavelet packet transform. Next, the energy values that can reflect the characteristics of various faults are extracted from each subband to form a feature vector. Finally, a group of measured fault data from the rolling bearing test-bed of Case Western Reserve University in the United States are used to verify the correctness of the method.
When rolling bearings operate in rotating mechanical equipment, complex vibration signals will be measured, which can reflect equipment′s operation condition. The existing signal processing methods of rolling bearings mostly use single channel information, which can not reflect the fault state of the whole section. In this paper, a fault feature extraction method based on full vector improved continuous harmonic wavelet packet transform is proposed. Firstly, two orthogonal sensors are used to realize the dual channel vibration signal acquisition on a certain section of rolling bearing. Secondly, the collected homologous dual channel signals are fused with full vector spectrum technology. Then, the fused signal is decomposed by improved continuous harmonic wavelet packet transform. Next, the energy values that can reflect the characteristics of various faults are extracted from each subband to form a feature vector. Finally, a group of measured fault data from the rolling bearing test-bed of Case Western Reserve University in the United States are used to verify the correctness of the method.







2023, 42(12): 2047-2054.
doi: 10.13433/j.cnki.1003-8728.20220164
Abstract:
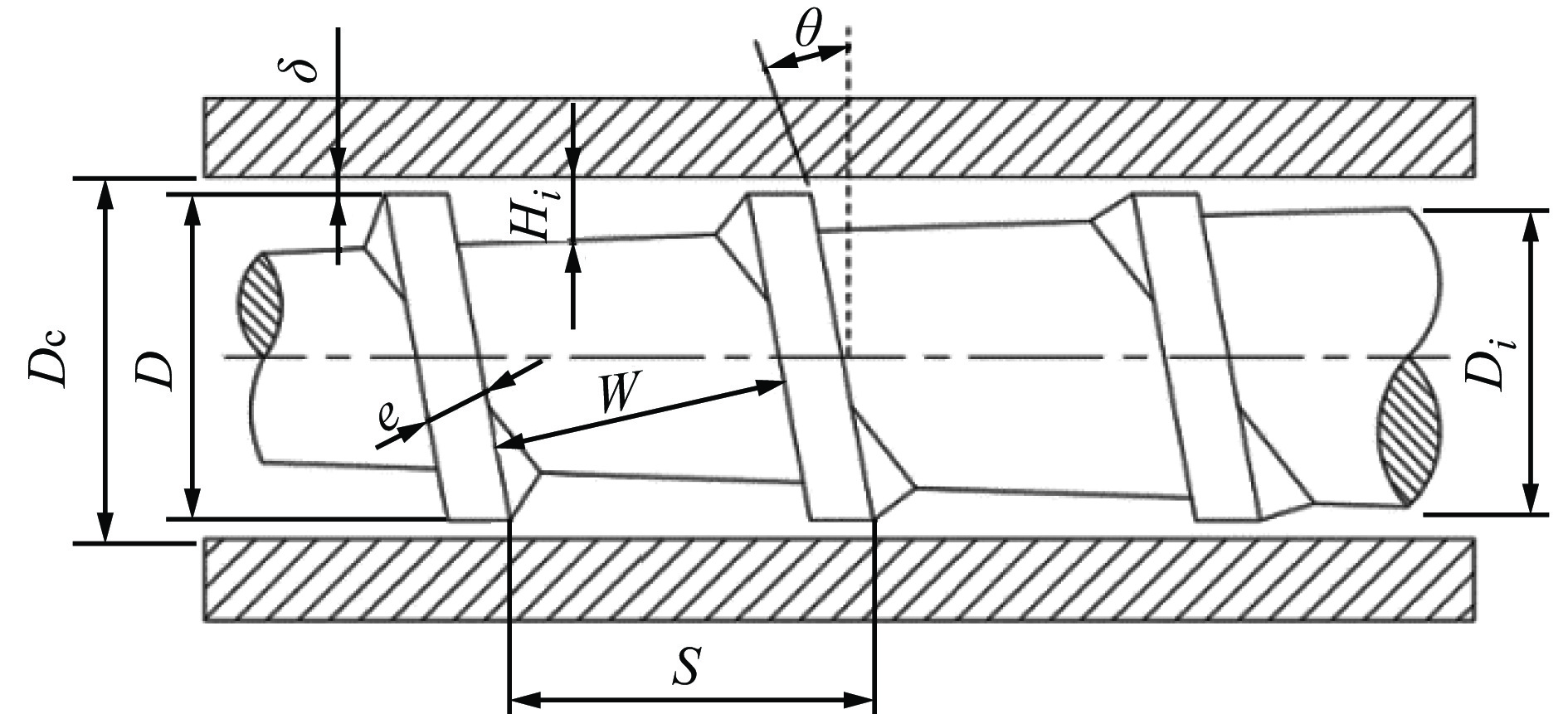
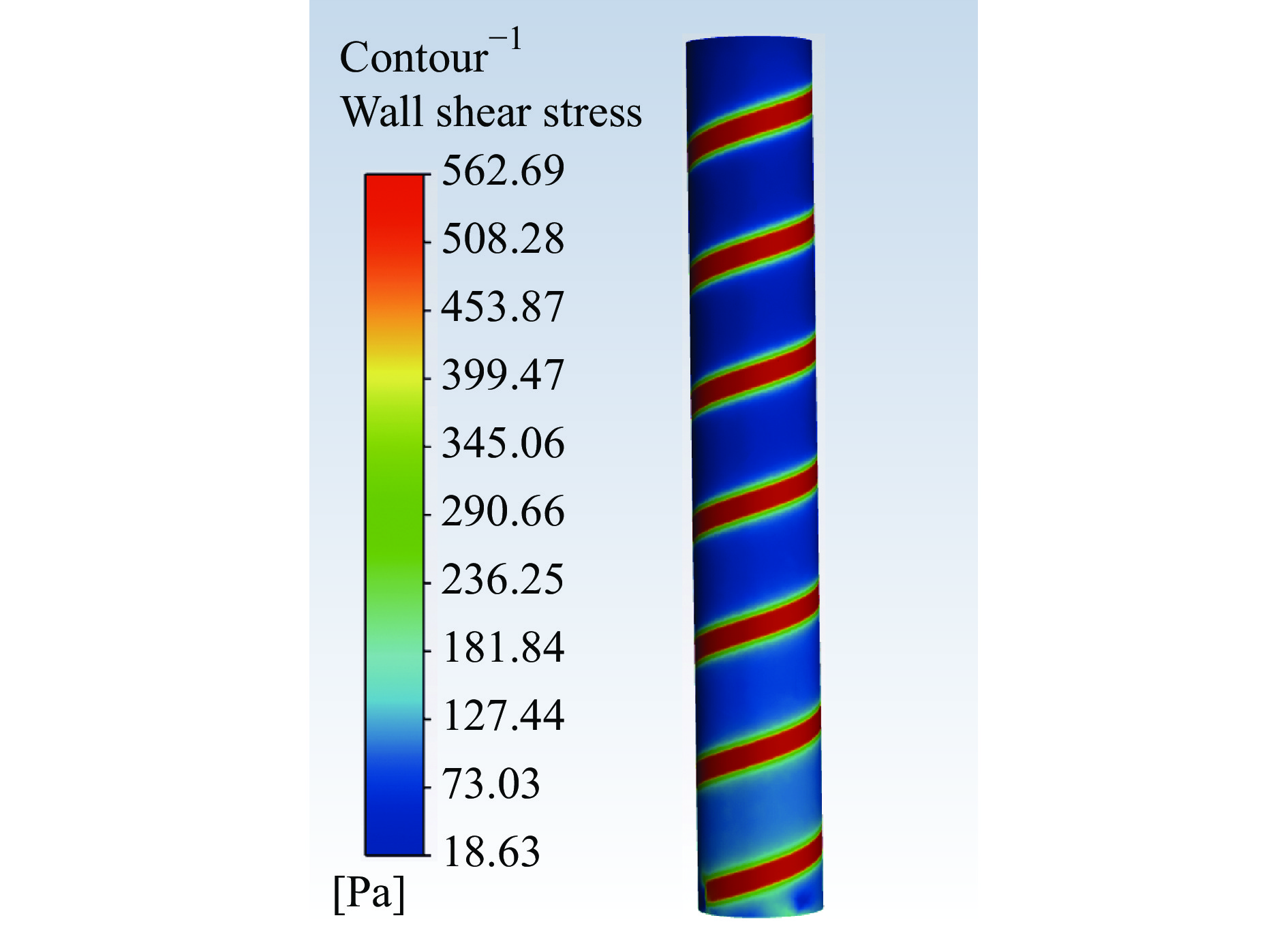
In order to meet the requirements of continuous multi-material printing and uniform mixing of ceramic 3D printer by micro-flow extrusion, a new structure of extrusion mixing for 3D printer with variable inner diameter screw was designed. It can not only realize one-way transportation of slurry with high solid content inside the nozzle, at the same time, the two materials were mixed evenly by rotating and stirring the screw with variable inner diameter.Through Ansys response surface optimization, the objective function is to achieve the maximum area weighted average velocity at the extrusion head with the minimum pressure.The matching different extrusion speed under different demand of low power consumption and high outputis carried out. In the screw section, the optimum maximum shear rate was taken as the objective function to achieve the uniform mixing of the two ceramic pastes.The results show that the high precision printing with different small flow rates and the uniform mixing of the two materials can be realized under the requirements of low rotation speed and miniaturization of the screw.
In order to meet the requirements of continuous multi-material printing and uniform mixing of ceramic 3D printer by micro-flow extrusion, a new structure of extrusion mixing for 3D printer with variable inner diameter screw was designed. It can not only realize one-way transportation of slurry with high solid content inside the nozzle, at the same time, the two materials were mixed evenly by rotating and stirring the screw with variable inner diameter.Through Ansys response surface optimization, the objective function is to achieve the maximum area weighted average velocity at the extrusion head with the minimum pressure.The matching different extrusion speed under different demand of low power consumption and high outputis carried out. In the screw section, the optimum maximum shear rate was taken as the objective function to achieve the uniform mixing of the two ceramic pastes.The results show that the high precision printing with different small flow rates and the uniform mixing of the two materials can be realized under the requirements of low rotation speed and miniaturization of the screw.















2023, 42(12): 2055-2063.
doi: 10.13433/j.cnki.1003-8728.20220184
Abstract:
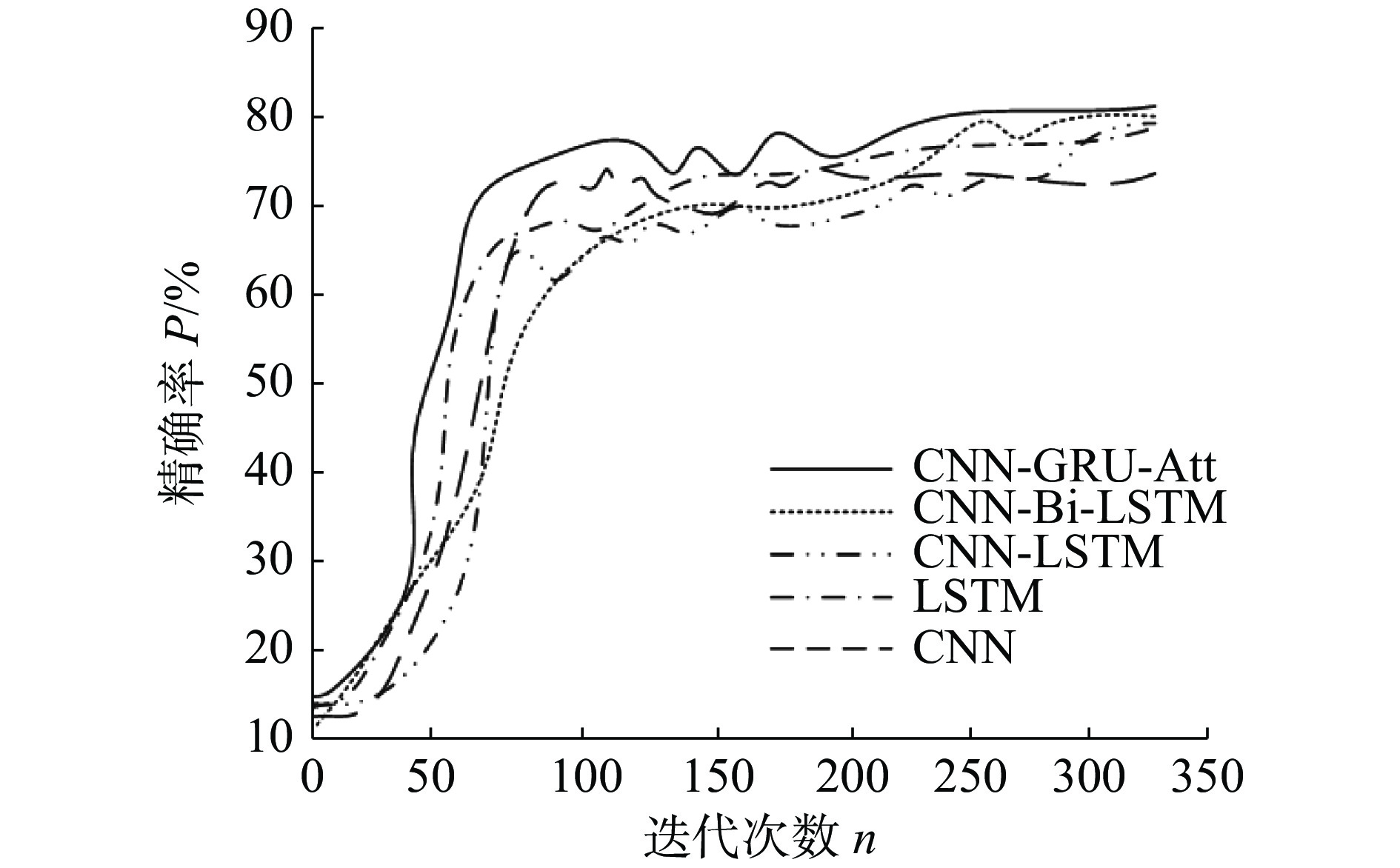
Aiming at the problems of high incidence rate and multiple types of automobile engine faults, complex coupling relationship between fault symptom and faults, and difficulty in fault traceability and low accuracy, an intelligent prediction method of engine fault based on knowledge graph and multiple neural network is proposed. Firstly, the engine running state, fault phenomena, fault causes and maintenance records are taken as input information, and the structured knowledge network which can be represented and inferred is formed through knowledge extraction, disambiguation and processing. The eigenvectorsare carried out for the knowledge network. Secondly, a multi-neural network pathway including fault record embedding layer, convolutional layer, GRU (Gate Recurrent Unit) gating layer and attention mechanism is established, and the engine fault prediction model is formed through eigenvector training, which will realize the mapping transformation from qualitative fault phenomena to quantitative fault reasoning, and then to qualitative fault prediction output.Finally, the feasibility and effectiveness of the proposed KG-CNN-GRU-Att (Knowledge Graph-Convolutional Neural Network- Gate Recurrent Unit-Attention) method are verified by a practical maintenance case.
Aiming at the problems of high incidence rate and multiple types of automobile engine faults, complex coupling relationship between fault symptom and faults, and difficulty in fault traceability and low accuracy, an intelligent prediction method of engine fault based on knowledge graph and multiple neural network is proposed. Firstly, the engine running state, fault phenomena, fault causes and maintenance records are taken as input information, and the structured knowledge network which can be represented and inferred is formed through knowledge extraction, disambiguation and processing. The eigenvectorsare carried out for the knowledge network. Secondly, a multi-neural network pathway including fault record embedding layer, convolutional layer, GRU (Gate Recurrent Unit) gating layer and attention mechanism is established, and the engine fault prediction model is formed through eigenvector training, which will realize the mapping transformation from qualitative fault phenomena to quantitative fault reasoning, and then to qualitative fault prediction output.Finally, the feasibility and effectiveness of the proposed KG-CNN-GRU-Att (Knowledge Graph-Convolutional Neural Network- Gate Recurrent Unit-Attention) method are verified by a practical maintenance case.








2023, 42(12): 2064-2071.
doi: 10.13433/j.cnki.1003-8728.20220173
Abstract:
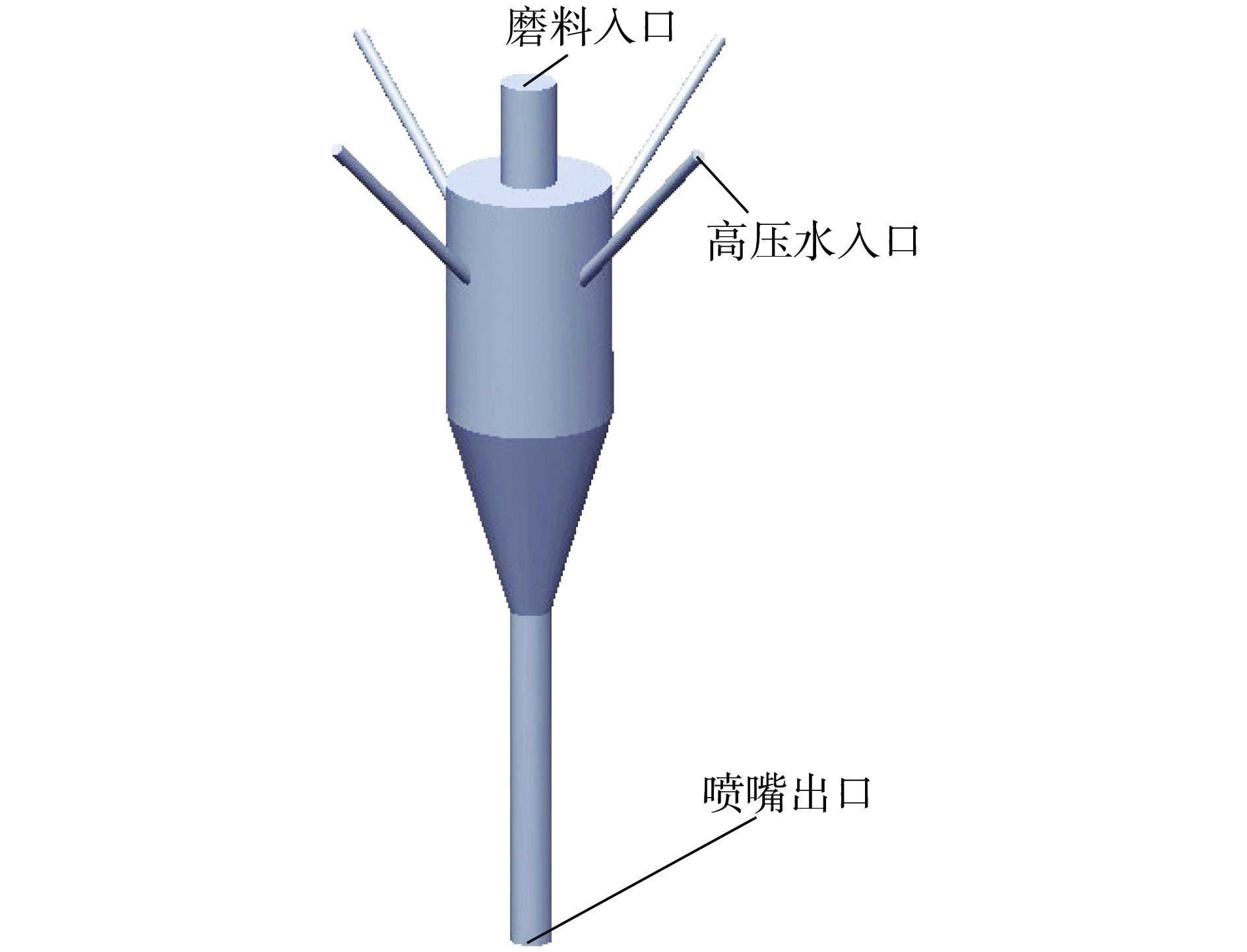
Because of poor mixing uniformity and low jet energy of abrasive water in the traditional post-mixed abrasive water jet nozzle, the paper uses the CFD Euler multiphase flow model and the Fluent software to analyze and compare the abrasive side-feed nozzle, the abrasive medium-feed type and the improved abrasive medium-feed nozzle. The analysis results show that the abrasive water of the abrasive side-feed nozzle is mainly distributed in the low-velocity area and fails to enter into the high-speed water stream, resulting in poor mixing uniformity and low jet energy. The abrasive medium-feed nozzle solves the problem that abrasive water enters into the high-speed water stream and that the abrasive volume fraction and abrasive velocity gradually decrease from the center to the outside, significantly improving the jet effect. The improved abrasive inlet nozzle reduces the collision loss of the high-speed water flow in the original abrasive inlet nozzle's mixing chamber, somewhat increasing the speed and kinetic energy of the abrasive water in the external flow field.
Because of poor mixing uniformity and low jet energy of abrasive water in the traditional post-mixed abrasive water jet nozzle, the paper uses the CFD Euler multiphase flow model and the Fluent software to analyze and compare the abrasive side-feed nozzle, the abrasive medium-feed type and the improved abrasive medium-feed nozzle. The analysis results show that the abrasive water of the abrasive side-feed nozzle is mainly distributed in the low-velocity area and fails to enter into the high-speed water stream, resulting in poor mixing uniformity and low jet energy. The abrasive medium-feed nozzle solves the problem that abrasive water enters into the high-speed water stream and that the abrasive volume fraction and abrasive velocity gradually decrease from the center to the outside, significantly improving the jet effect. The improved abrasive inlet nozzle reduces the collision loss of the high-speed water flow in the original abrasive inlet nozzle's mixing chamber, somewhat increasing the speed and kinetic energy of the abrasive water in the external flow field.


















2023, 42(12): 2072-2078.
doi: 10.13433/j.cnki.1003-8728.20220177
Abstract:
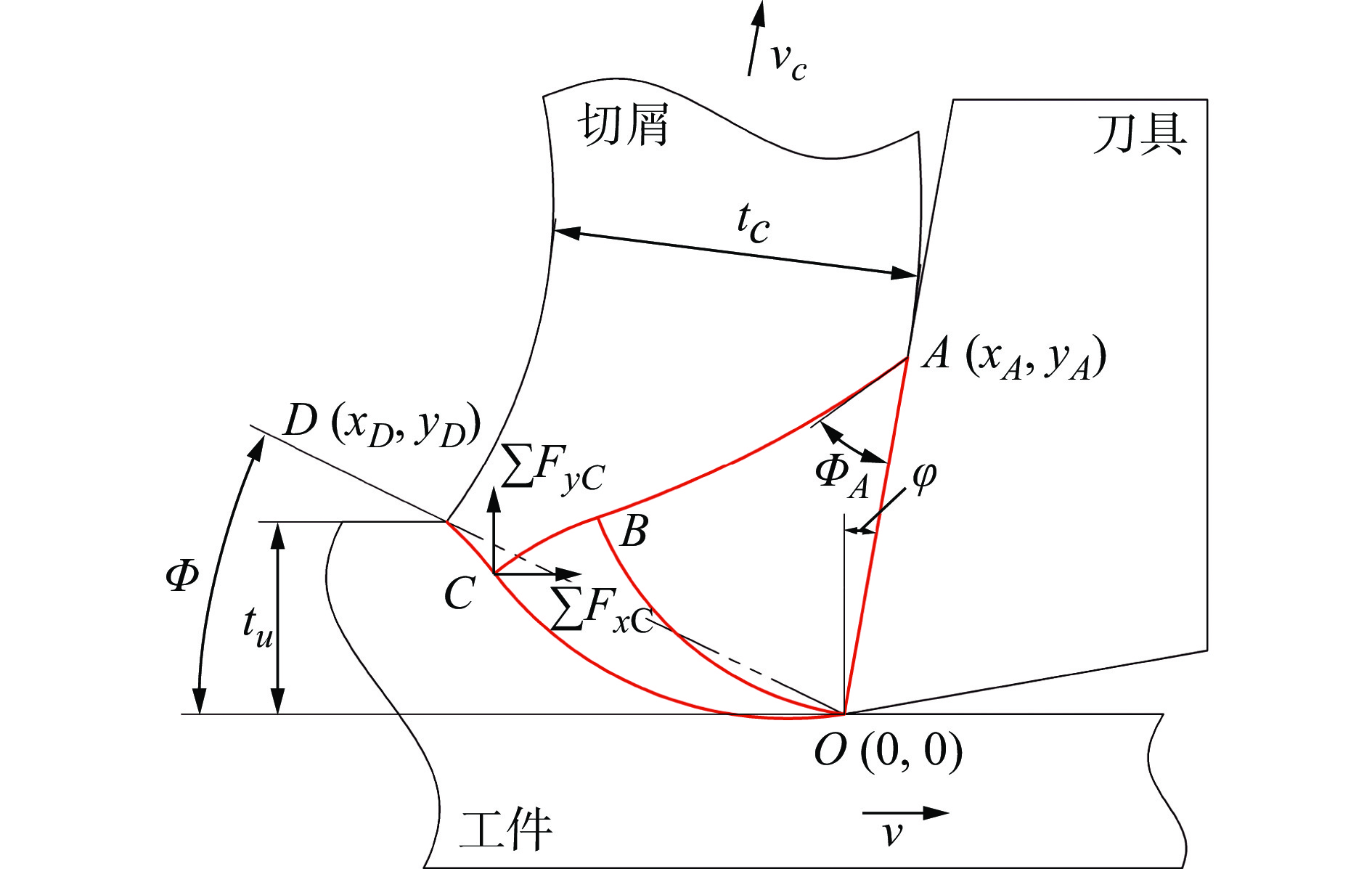
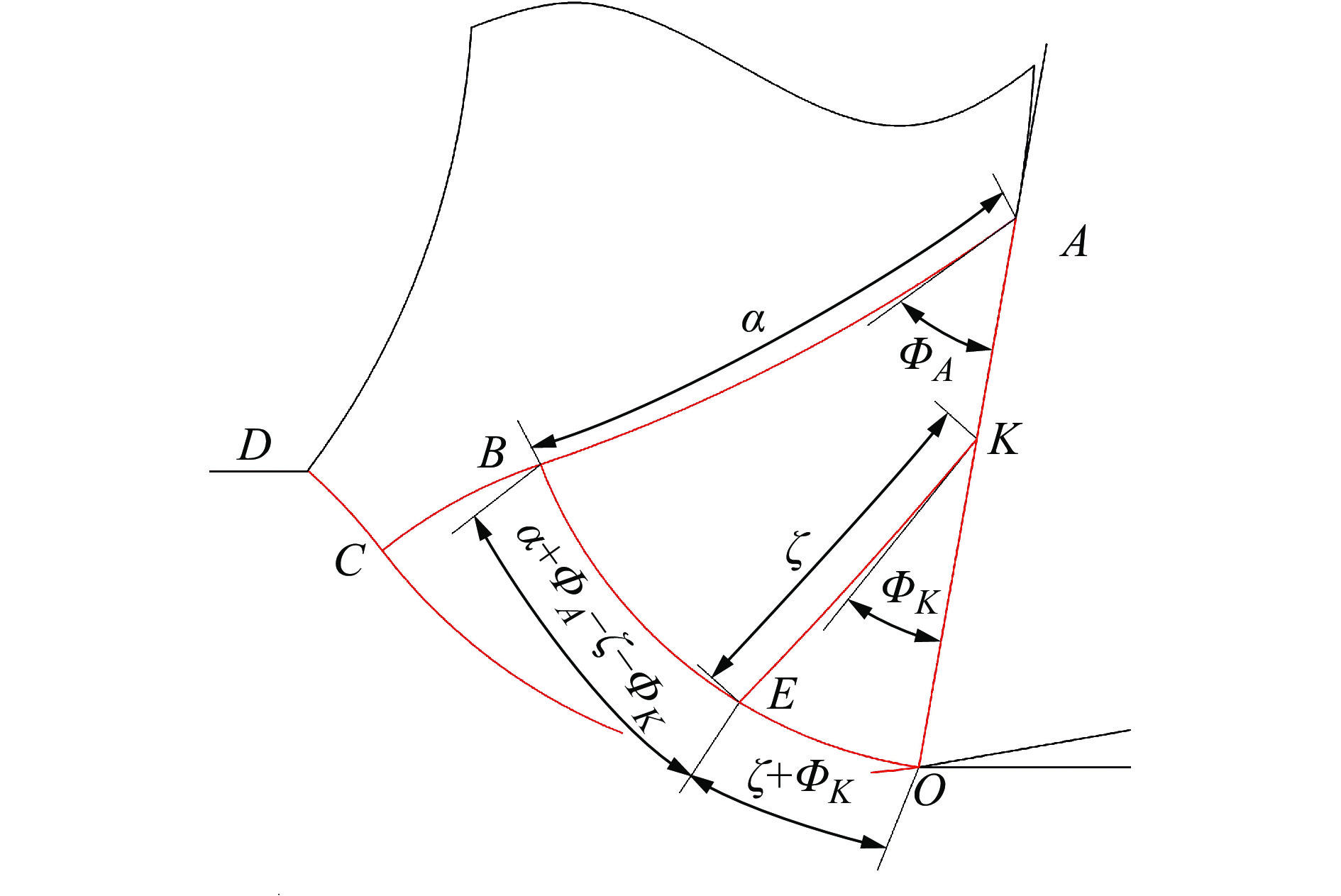
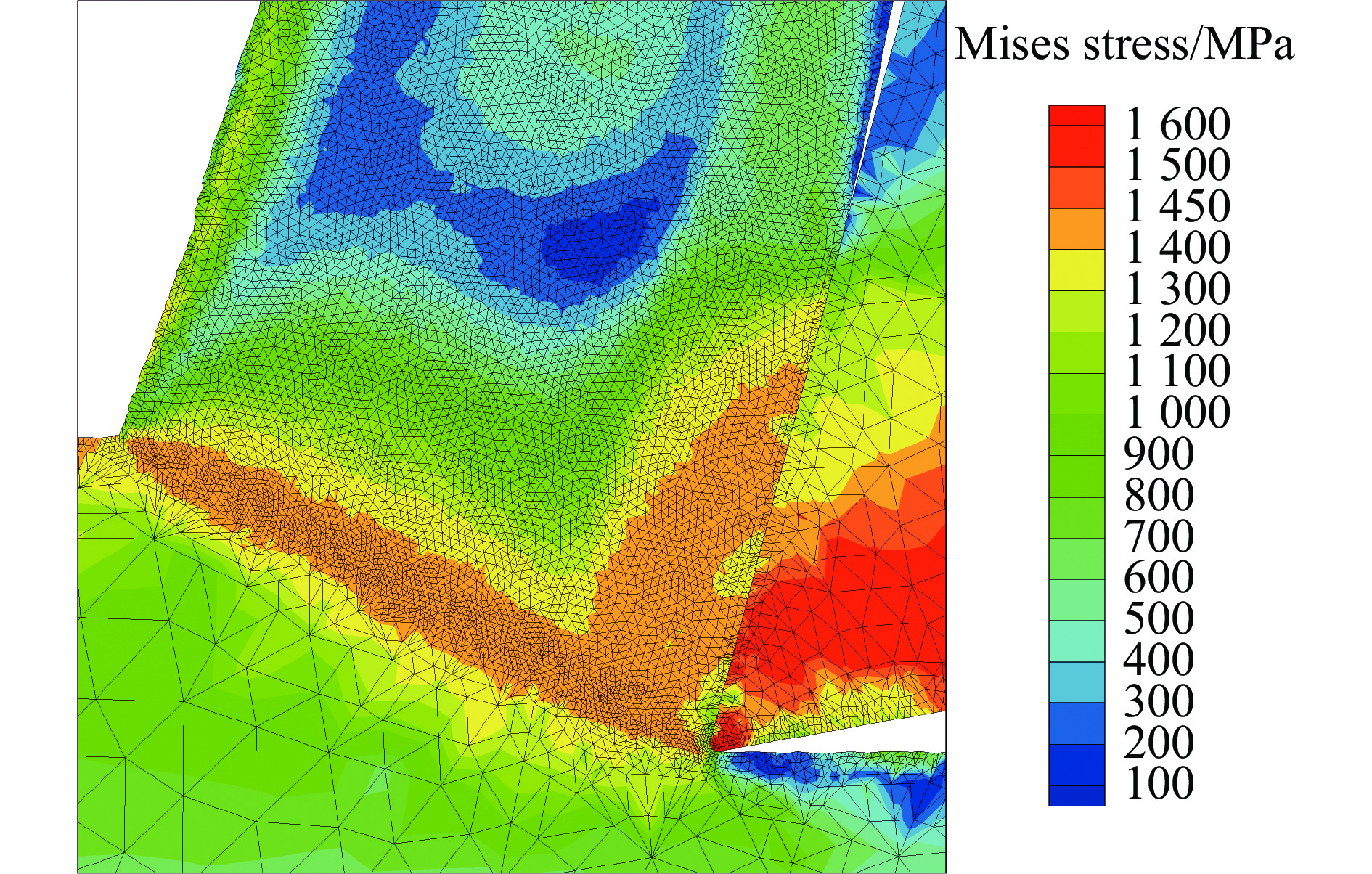
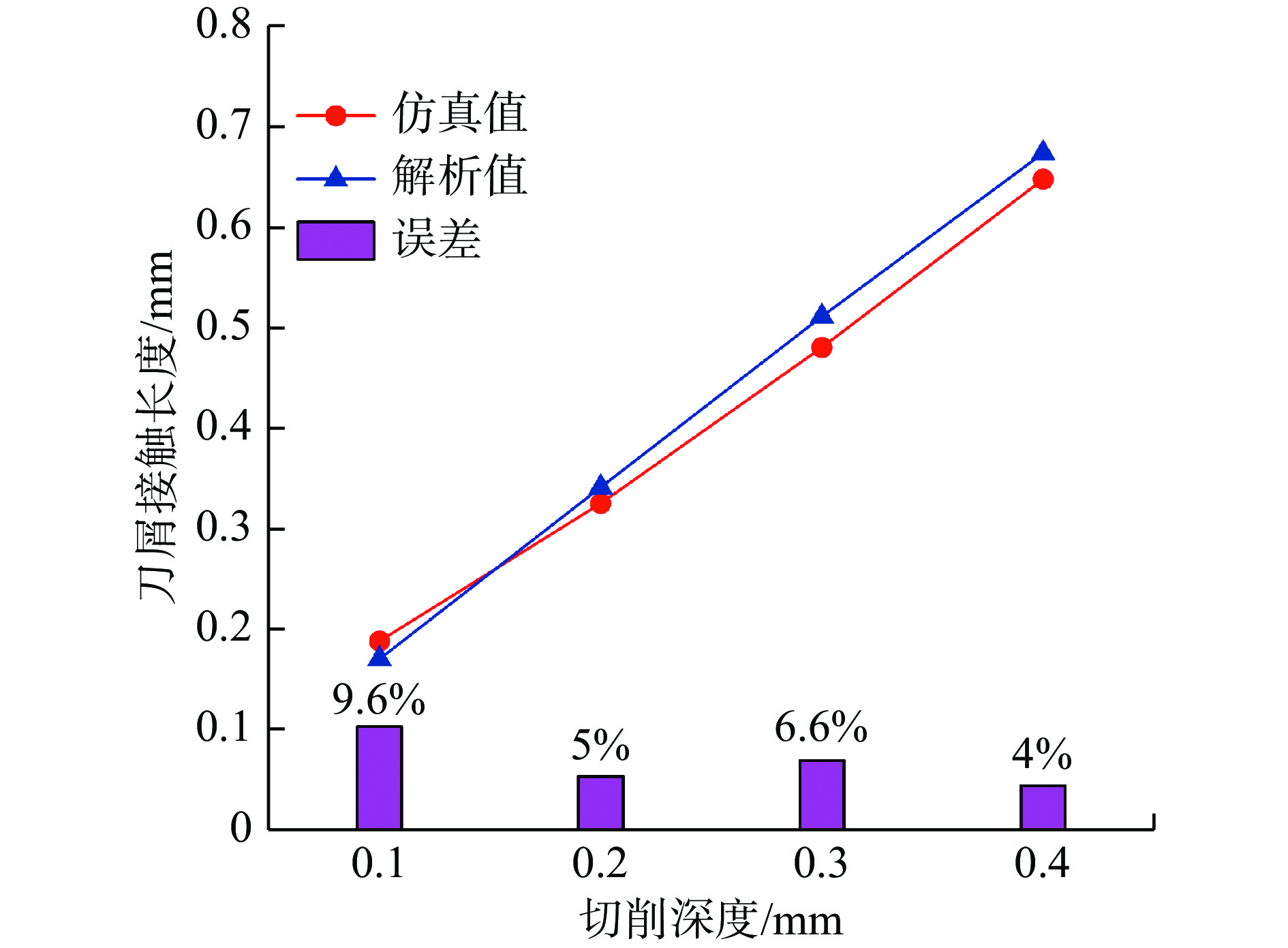
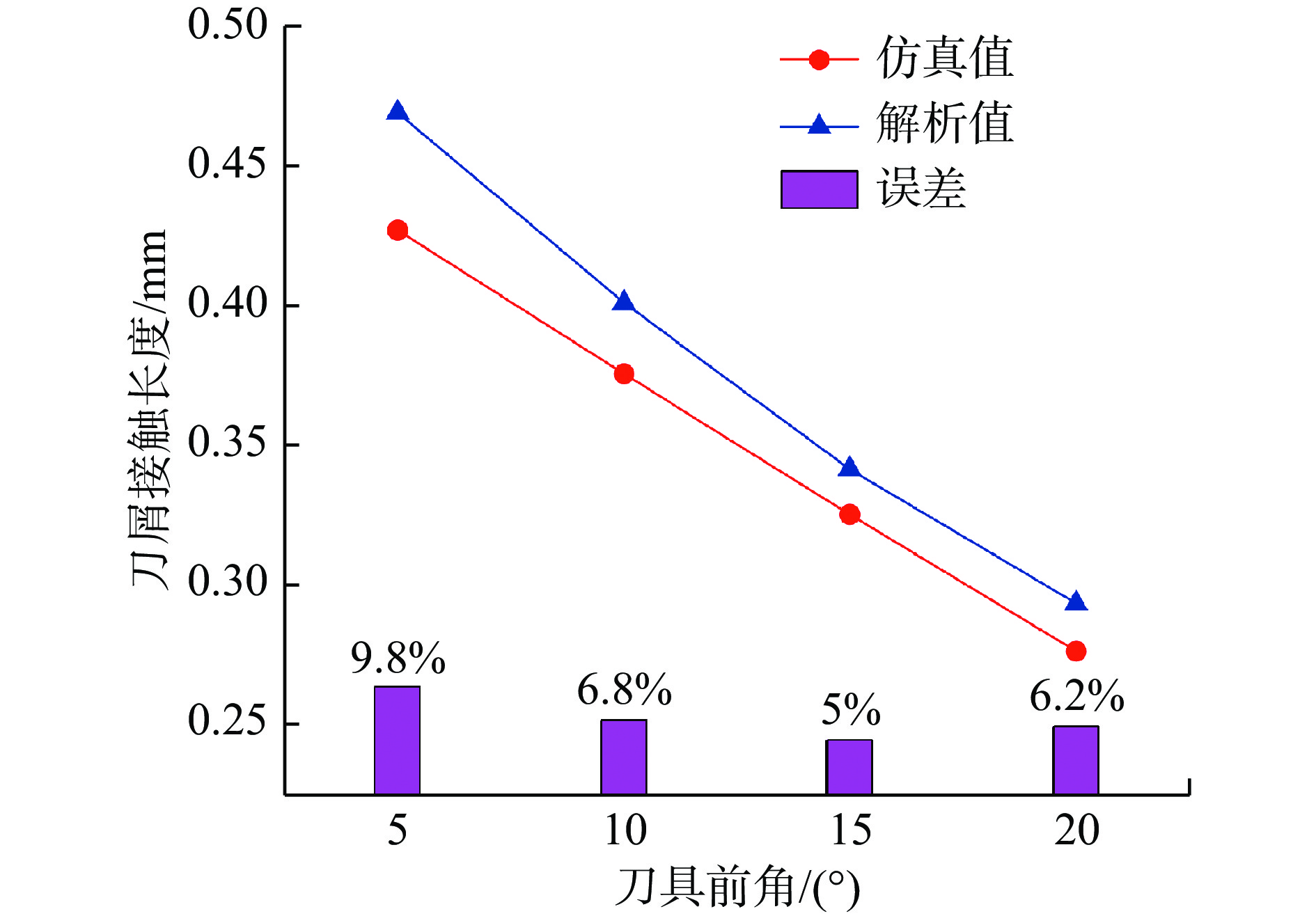
The friction coefficient between the tool and the chip is unevenly distributed which increases the difficulty of orthogonal cutting analysis and lacks an analytical model. A slip-line field with variable friction coefficient on the tool-chip contact surface is constructed with matrix operator method. Geometric constraints, which obtain from the position of plastic shear deformation of workpiece surface found in terms of the Oxley's shear cutting theory, are added to the slip-line field to determine the parameters in the slip-line field. According to the above model, the tool-chip contact length is derived and the analytical formula of the cutting force is deduced. By comparing with the model and the finite element results in the cutting of GH4169, it is found that the error of tool-chip contact length is within 9.8%, the change in cutting force is slight, which verifies the accuracy of the model via slip line field method. The above results provide a theoretical method for orthogonal cutting with variable friction coefficient analysis of tool chip contact length and cutting force.
The friction coefficient between the tool and the chip is unevenly distributed which increases the difficulty of orthogonal cutting analysis and lacks an analytical model. A slip-line field with variable friction coefficient on the tool-chip contact surface is constructed with matrix operator method. Geometric constraints, which obtain from the position of plastic shear deformation of workpiece surface found in terms of the Oxley's shear cutting theory, are added to the slip-line field to determine the parameters in the slip-line field. According to the above model, the tool-chip contact length is derived and the analytical formula of the cutting force is deduced. By comparing with the model and the finite element results in the cutting of GH4169, it is found that the error of tool-chip contact length is within 9.8%, the change in cutting force is slight, which verifies the accuracy of the model via slip line field method. The above results provide a theoretical method for orthogonal cutting with variable friction coefficient analysis of tool chip contact length and cutting force.








2023, 42(12): 2079-2084.
doi: 10.13433/j.cnki.1003-8728.20220181
Abstract:
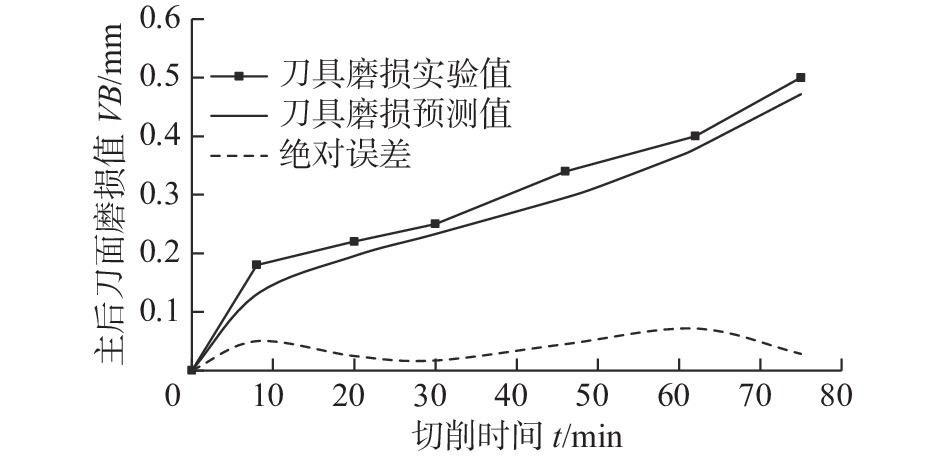
The turning experiments of Superalloy GH901 were carried out with three different types of cutting tools A, B and C at 40m/min and 60m/min.By observing the tool flank wear state, the life curves of tool are established and the tool types are optimized according to the tool wear and life curves. Finally, the prediction model for tool wearis established.The maximum root mean square error and mean absolute error of the experimental and the prediction results are 0.04349 and 0.03943 mm, respectively,the small error proves the effectiveness of the prediction model. The comprehensive cutting performance from high to low is toolA, tool B and tool C. The chip type is dominated by long annular spiral chips, and the tool life is significantly reduced with the higher cutting speed.
The turning experiments of Superalloy GH901 were carried out with three different types of cutting tools A, B and C at 40m/min and 60m/min.By observing the tool flank wear state, the life curves of tool are established and the tool types are optimized according to the tool wear and life curves. Finally, the prediction model for tool wearis established.The maximum root mean square error and mean absolute error of the experimental and the prediction results are 0.04349 and 0.03943 mm, respectively,the small error proves the effectiveness of the prediction model. The comprehensive cutting performance from high to low is toolA, tool B and tool C. The chip type is dominated by long annular spiral chips, and the tool life is significantly reduced with the higher cutting speed.














2023, 42(12): 2085-2092.
doi: 10.13433/j.cnki.1003-8728.20220160
Abstract:
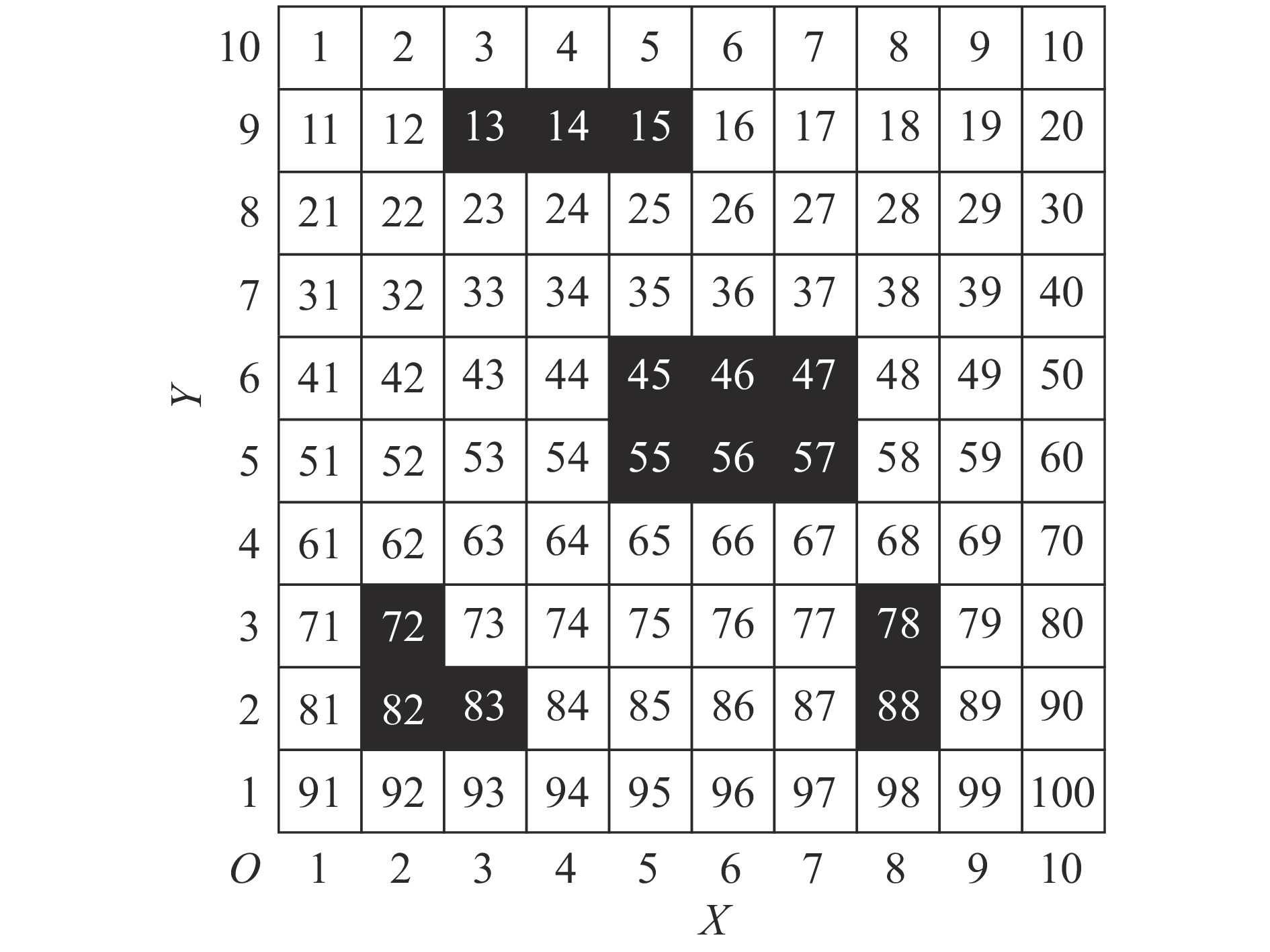
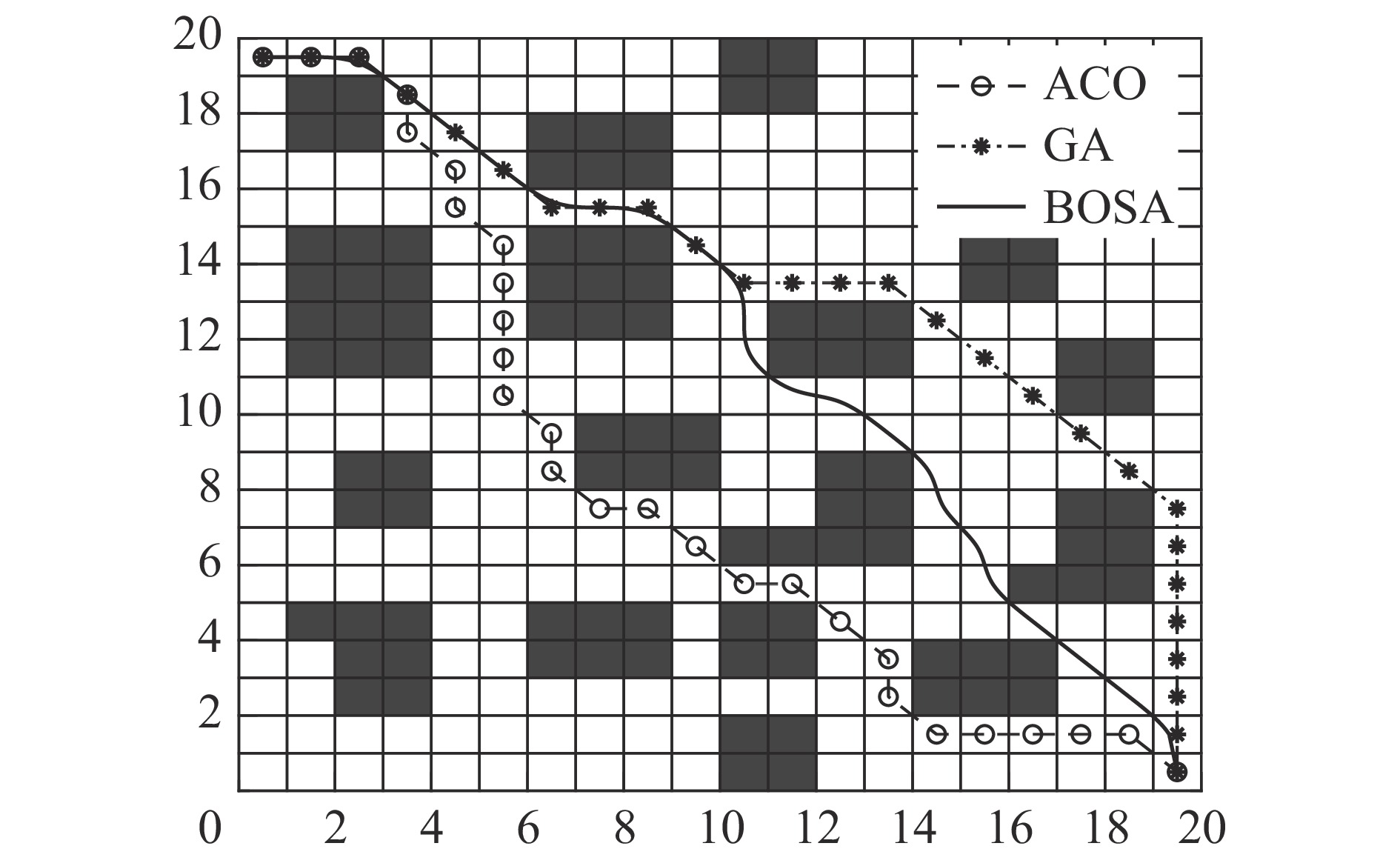
An improved butterfly optimization algorithm is proposed for mobile robot path planning. Firstly, the butterfly optimization algorithm is combined with the grid method, and the combined algorithm is explained in detail. Secondly, the tabu list and backtracking method are introduced to solve the problem that the algorithm has no subsequent extension nodes in the path optimization. Finally, combined with cubic B-spline curve, the optimal node in the path planning is taken as the control point for smooth output, which makes the actual motion path of mobile robot smoother. Through the simulation experiment, the improved algorithm is compared with ant colony algorithm and genetic algorithm, theresult proves that the improved algorithm can effectively solve the path planning problem, and is an effective and feasible optimization algorithm.Finally, the improved algorithm is applied to the actual mobile robot based on ROS. The experimental results also prove the effectiveness and feasibility of the improved algorithm.
An improved butterfly optimization algorithm is proposed for mobile robot path planning. Firstly, the butterfly optimization algorithm is combined with the grid method, and the combined algorithm is explained in detail. Secondly, the tabu list and backtracking method are introduced to solve the problem that the algorithm has no subsequent extension nodes in the path optimization. Finally, combined with cubic B-spline curve, the optimal node in the path planning is taken as the control point for smooth output, which makes the actual motion path of mobile robot smoother. Through the simulation experiment, the improved algorithm is compared with ant colony algorithm and genetic algorithm, theresult proves that the improved algorithm can effectively solve the path planning problem, and is an effective and feasible optimization algorithm.Finally, the improved algorithm is applied to the actual mobile robot based on ROS. The experimental results also prove the effectiveness and feasibility of the improved algorithm.









2023, 42(12): 2093-2099.
doi: 10.13433/j.cnki.1003-8728.20220162
Abstract:
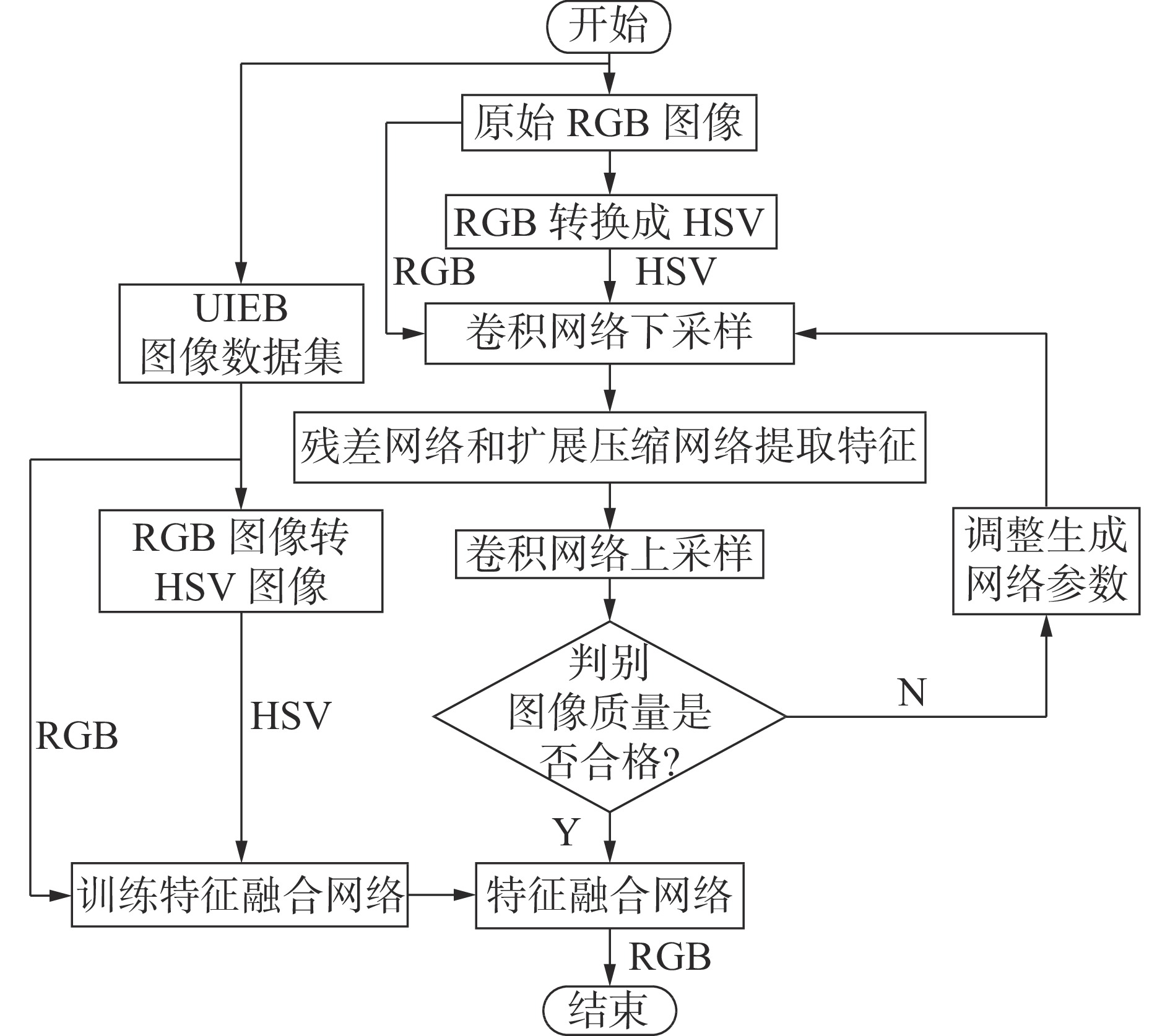
The underwater image enhancement based on the deep learning method considers only the RGB feature space, therefore the image enhancement effect is unsatisfactory. To cope with this problem, this paper proposed an improved underwater color image enhancement algorithm based on the cyclic generative adversarial network (CycleGAN). Both RGB and HSV color spaces of an image are used to train the CycleGAN. The features down-sampled from the CycleGAN are input into the residual network and the expansion compression module to extract useful features. The weights of RGB and HSV spaces are adaptively adjusted in the expansion and compression module. The pre-trained CycleGAN acts on the paired water degraded image and the enhanced image for weakly supervised training. The feature fusion network is adopted to fuse the output of the CycleGAN into three channels of a new RGB image. The experimental results show that the algorithm can effectively combine the feature information on both RGB and HSV spaces, improves the contrast and brightness of the underwater image and corrects its color deviation.
The underwater image enhancement based on the deep learning method considers only the RGB feature space, therefore the image enhancement effect is unsatisfactory. To cope with this problem, this paper proposed an improved underwater color image enhancement algorithm based on the cyclic generative adversarial network (CycleGAN). Both RGB and HSV color spaces of an image are used to train the CycleGAN. The features down-sampled from the CycleGAN are input into the residual network and the expansion compression module to extract useful features. The weights of RGB and HSV spaces are adaptively adjusted in the expansion and compression module. The pre-trained CycleGAN acts on the paired water degraded image and the enhanced image for weakly supervised training. The feature fusion network is adopted to fuse the output of the CycleGAN into three channels of a new RGB image. The experimental results show that the algorithm can effectively combine the feature information on both RGB and HSV spaces, improves the contrast and brightness of the underwater image and corrects its color deviation.






2023, 42(12): 2100-2109.
doi: 10.13433/j.cnki.1003-8728.20220163
Abstract:
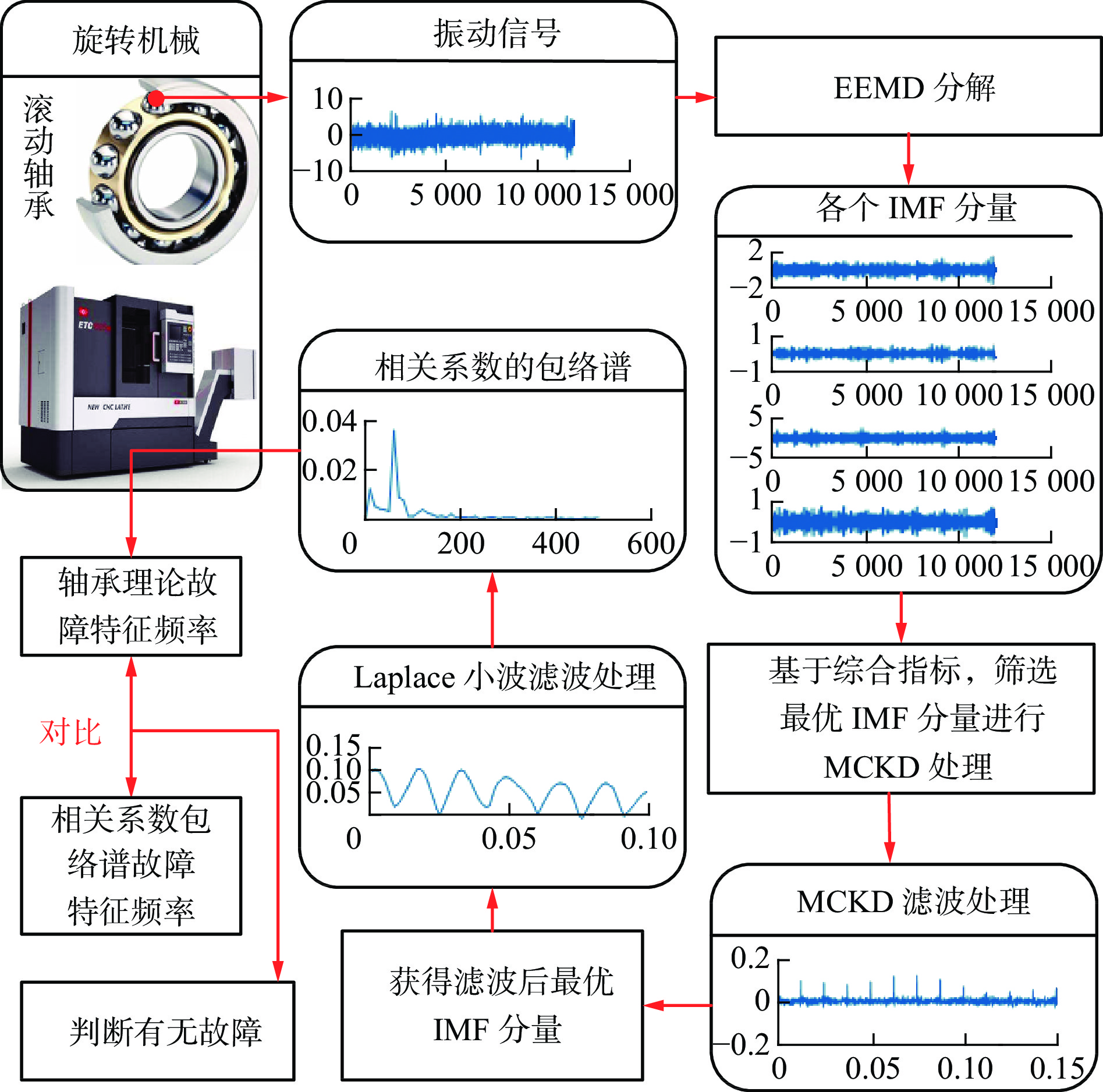
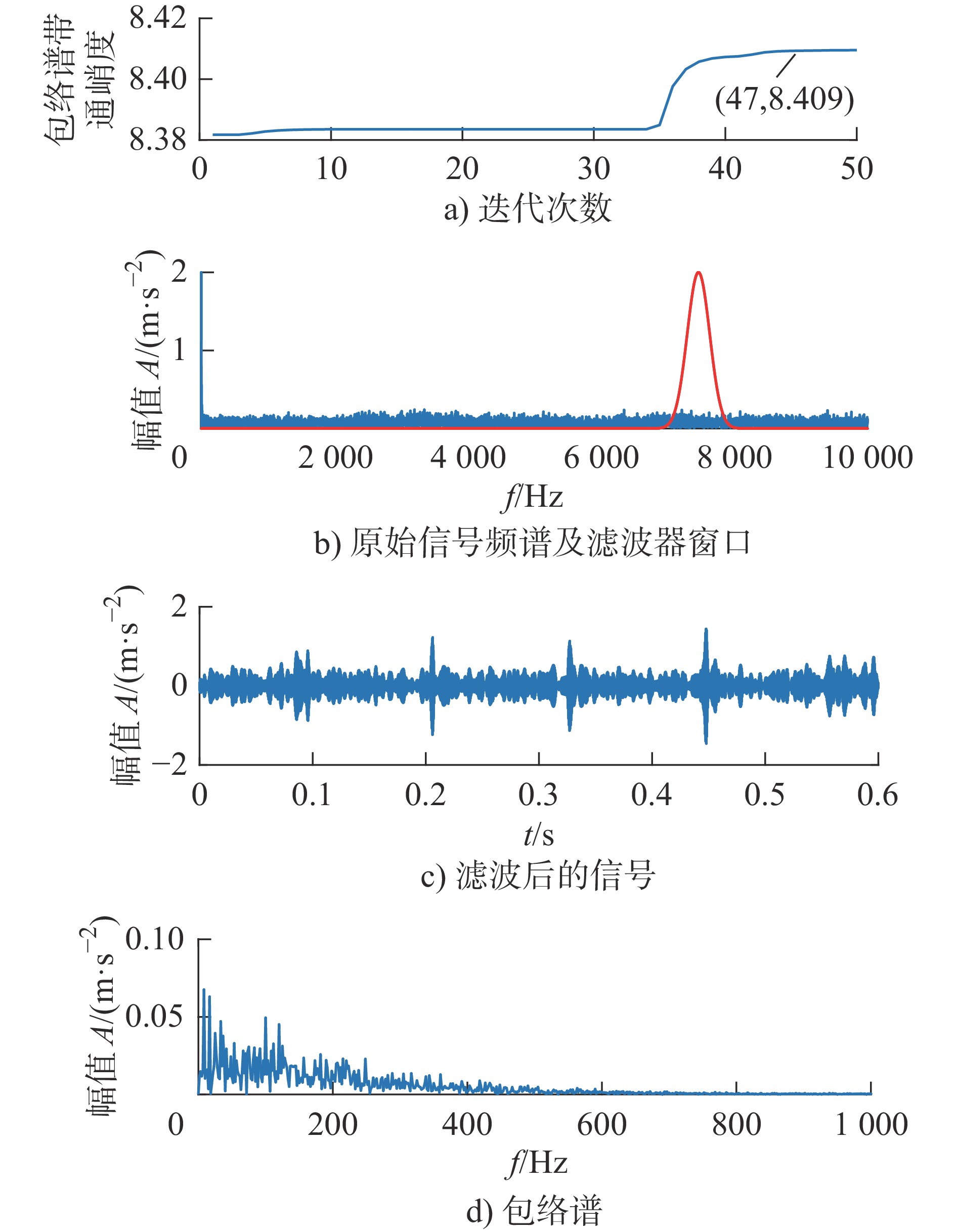
Seeking to the interference problem of components such as noise and rotating frequency when extracting the impact characteristics of bearing faults, a bearing fault diagnosis method by correlation coefficient envelope spectrum combined with indicator CeK is proposed. In the signal preprocessing stage, EEMD is utilized to decompose the original vibration signal into multiple intrinsic modal components (IMFs), and the optimal modal component is selected based on the principle of the proposed new comprehensive index CeK value, the MCKD is further used to filter and reduce noise on the optimal component. Finally, the peak value of the correlation coefficient is extracted by the Laplace wavelet correlation filtering method, and the envelope spectrum of the correlation coefficient is made. The feasibility of the proposed approach is verified by the analysis results of the simulated signals. With the help of the real fault signals collected by Nanchang Railway Bureau, and replacing the proposed comprehensive index with kurtosis for subsequent processing and the analysis results of adaptive Morlet wavelet filtering to extract fault features, the superiority of this study in extracting fault feature frequency using the comprehensive index CeK and correlation coefficient envelope spectrum is verified.
Seeking to the interference problem of components such as noise and rotating frequency when extracting the impact characteristics of bearing faults, a bearing fault diagnosis method by correlation coefficient envelope spectrum combined with indicator CeK is proposed. In the signal preprocessing stage, EEMD is utilized to decompose the original vibration signal into multiple intrinsic modal components (IMFs), and the optimal modal component is selected based on the principle of the proposed new comprehensive index CeK value, the MCKD is further used to filter and reduce noise on the optimal component. Finally, the peak value of the correlation coefficient is extracted by the Laplace wavelet correlation filtering method, and the envelope spectrum of the correlation coefficient is made. The feasibility of the proposed approach is verified by the analysis results of the simulated signals. With the help of the real fault signals collected by Nanchang Railway Bureau, and replacing the proposed comprehensive index with kurtosis for subsequent processing and the analysis results of adaptive Morlet wavelet filtering to extract fault features, the superiority of this study in extracting fault feature frequency using the comprehensive index CeK and correlation coefficient envelope spectrum is verified.











2023, 42(12): 2110-2117.
doi: 10.13433/j.cnki.1003-8728.20220174
Abstract:
According to the standard vehicle model of a mini electric vehicle, an effective simple restraint system model is established to study the occupant dynamic response and restraint system input conditions of 64km/h small offset collision. Through univariate driver injury analysis on 7 related parameters of the restraint system, such as the side air curtain mass flow scaling rate, the ignition time of the airbag and the peak limit force of the seat belt, the four main influencing factors of the restraint system under a small offset collision are determined. A four-factor and nine-level orthogonal experiment is designed; The impact of different matching parameters of the restraint system on the weighted injury index (WIC) of the occupant and the occupant's head, neck, chest, legs, etc. is calculated; Combined with the range ratio parameter, a small deviation advice on adjustment and matching of the collision restraint system is given. Furthermore, constructing a high-order polynomial surrogate model of the constraint system parameters and WIC, and the optimal combination solution of the constraint system is determined. The results showed that the head injury index HIC was reduced by 64%, and the overall weighted comprehensive injury WIC value was reduced by 56%.
According to the standard vehicle model of a mini electric vehicle, an effective simple restraint system model is established to study the occupant dynamic response and restraint system input conditions of 64km/h small offset collision. Through univariate driver injury analysis on 7 related parameters of the restraint system, such as the side air curtain mass flow scaling rate, the ignition time of the airbag and the peak limit force of the seat belt, the four main influencing factors of the restraint system under a small offset collision are determined. A four-factor and nine-level orthogonal experiment is designed; The impact of different matching parameters of the restraint system on the weighted injury index (WIC) of the occupant and the occupant's head, neck, chest, legs, etc. is calculated; Combined with the range ratio parameter, a small deviation advice on adjustment and matching of the collision restraint system is given. Furthermore, constructing a high-order polynomial surrogate model of the constraint system parameters and WIC, and the optimal combination solution of the constraint system is determined. The results showed that the head injury index HIC was reduced by 64%, and the overall weighted comprehensive injury WIC value was reduced by 56%.






2023, 42(12): 2118-2124.
doi: 10.13433/j.cnki.1003-8728.20220179
Abstract:
In order to analyze the thermal post-buckling response of the graded porous material circular plate in the non-uniform temperature field, the governing differential equation of the graded porous material circular plate under thermal load was established on the basis of classical plate theory and the concept of physical neutral plane. It is assumed that the thickness change is quadratic parabolic along the radius and the plate has symmetric and asymmetric non-uniform porosity distribution across their thickness. Using shooting method technique, the buckling and post-buckling responses of the problem was numerically solved, and the post-buckling equilibrium paths of the graded porous nonlinear variable thickness circular plate under different types of thermal loads as heat conduction and uniform temperature rise were obtained. The results show that the variable thickness coefficient, porosity coefficient, pore distribution and temperature field have the effects on the critical load and post buckling equilibrium path of the plate; under different temperature fields, the larger the porosity coefficient, the smaller the critical load during buckling; the critical load under symmetrical porosity distribution is greater than that under asymmetric porosity distribution.
In order to analyze the thermal post-buckling response of the graded porous material circular plate in the non-uniform temperature field, the governing differential equation of the graded porous material circular plate under thermal load was established on the basis of classical plate theory and the concept of physical neutral plane. It is assumed that the thickness change is quadratic parabolic along the radius and the plate has symmetric and asymmetric non-uniform porosity distribution across their thickness. Using shooting method technique, the buckling and post-buckling responses of the problem was numerically solved, and the post-buckling equilibrium paths of the graded porous nonlinear variable thickness circular plate under different types of thermal loads as heat conduction and uniform temperature rise were obtained. The results show that the variable thickness coefficient, porosity coefficient, pore distribution and temperature field have the effects on the critical load and post buckling equilibrium path of the plate; under different temperature fields, the larger the porosity coefficient, the smaller the critical load during buckling; the critical load under symmetrical porosity distribution is greater than that under asymmetric porosity distribution.







2023, 42(12): 2125-2131.
doi: 10.13433/j.cnki.1003-8728.20220106
Abstract:
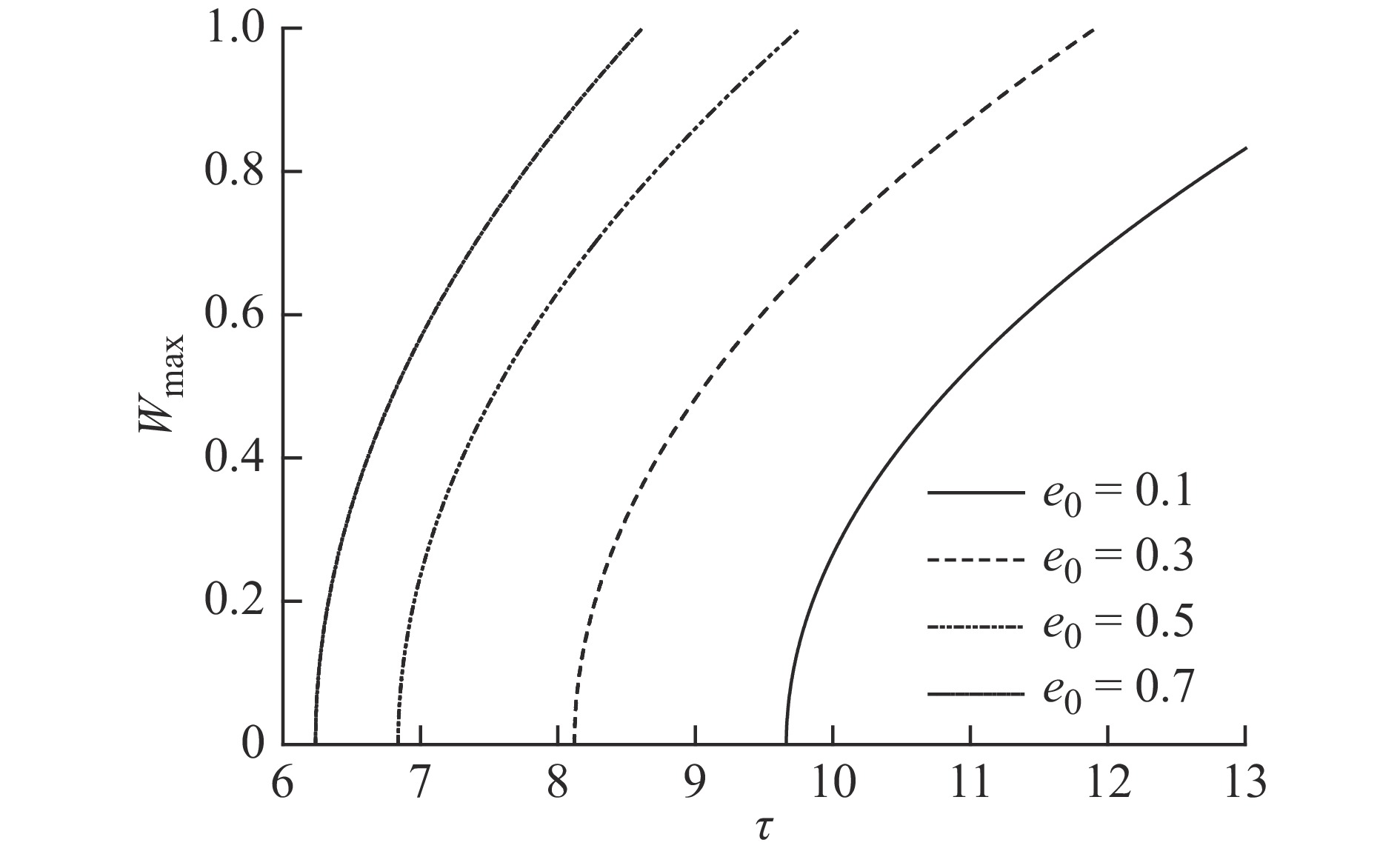
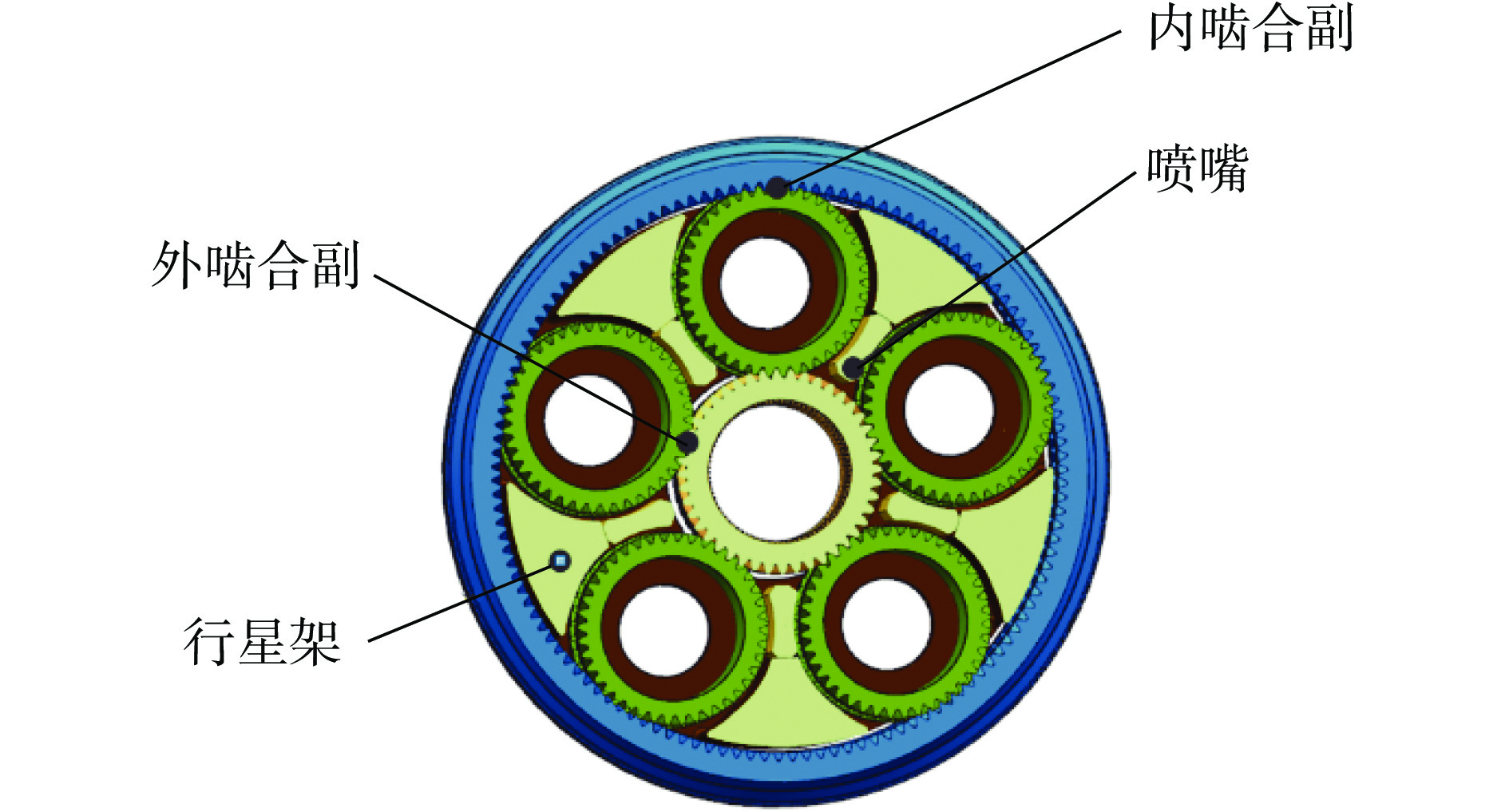
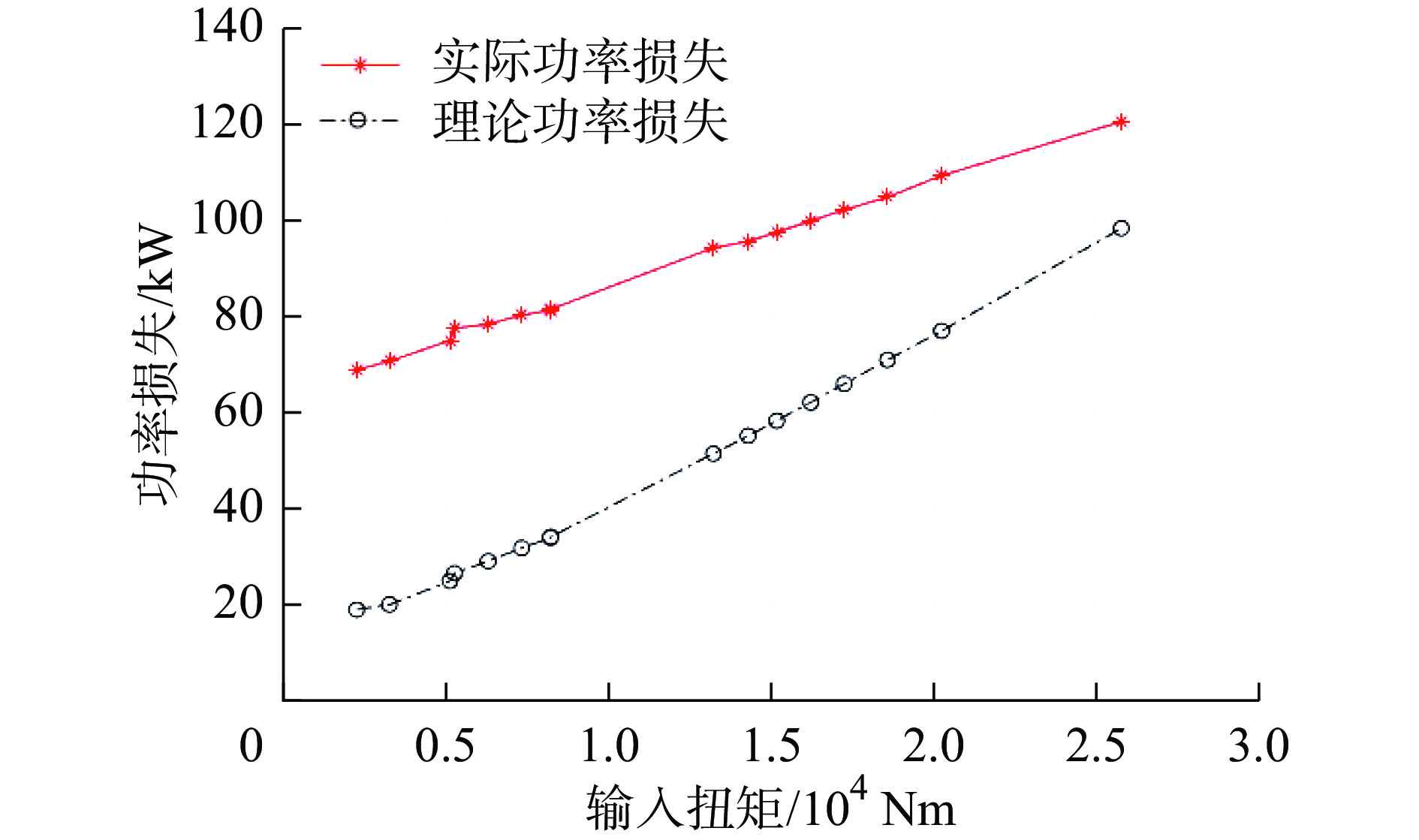
In order to study the windage power loss of Fan Drive Gearbox(FDGS), the limitation of the application of the general wind resistance formula with an oil air ratio of 1∶34.25 in the fan drive gearbox are clarified based on the original formula of gear windage power loss. Besides the oil-gas rate, the wind resistance formula of the inner gear ring windage power loss needed to be modified by using the CFD simulation. The power loss of FDGS under different working conditions was measured by using the direct method. The result show that the total power loss of the gearbox under light load has an exponential relationship with the rotational speed, and the windage power loss is dominant. The difference between the theoretical and the measured value is 50kW. Under the different rotational speeds and the same torque, the difference between the theoretical and the measured power loss is caused by the gear windage power loss, and the fitted oil-gas ratio in the FDGS is about 1∶1.37, in which the modified coefficient in the calculation formula of windage power loss is given.
In order to study the windage power loss of Fan Drive Gearbox(FDGS), the limitation of the application of the general wind resistance formula with an oil air ratio of 1∶34.25 in the fan drive gearbox are clarified based on the original formula of gear windage power loss. Besides the oil-gas rate, the wind resistance formula of the inner gear ring windage power loss needed to be modified by using the CFD simulation. The power loss of FDGS under different working conditions was measured by using the direct method. The result show that the total power loss of the gearbox under light load has an exponential relationship with the rotational speed, and the windage power loss is dominant. The difference between the theoretical and the measured value is 50kW. Under the different rotational speeds and the same torque, the difference between the theoretical and the measured power loss is caused by the gear windage power loss, and the fitted oil-gas ratio in the FDGS is about 1∶1.37, in which the modified coefficient in the calculation formula of windage power loss is given.










2023, 42(12): 2132-2143.
doi: 10.13433/j.cnki.1003-8728.20220180
Abstract:
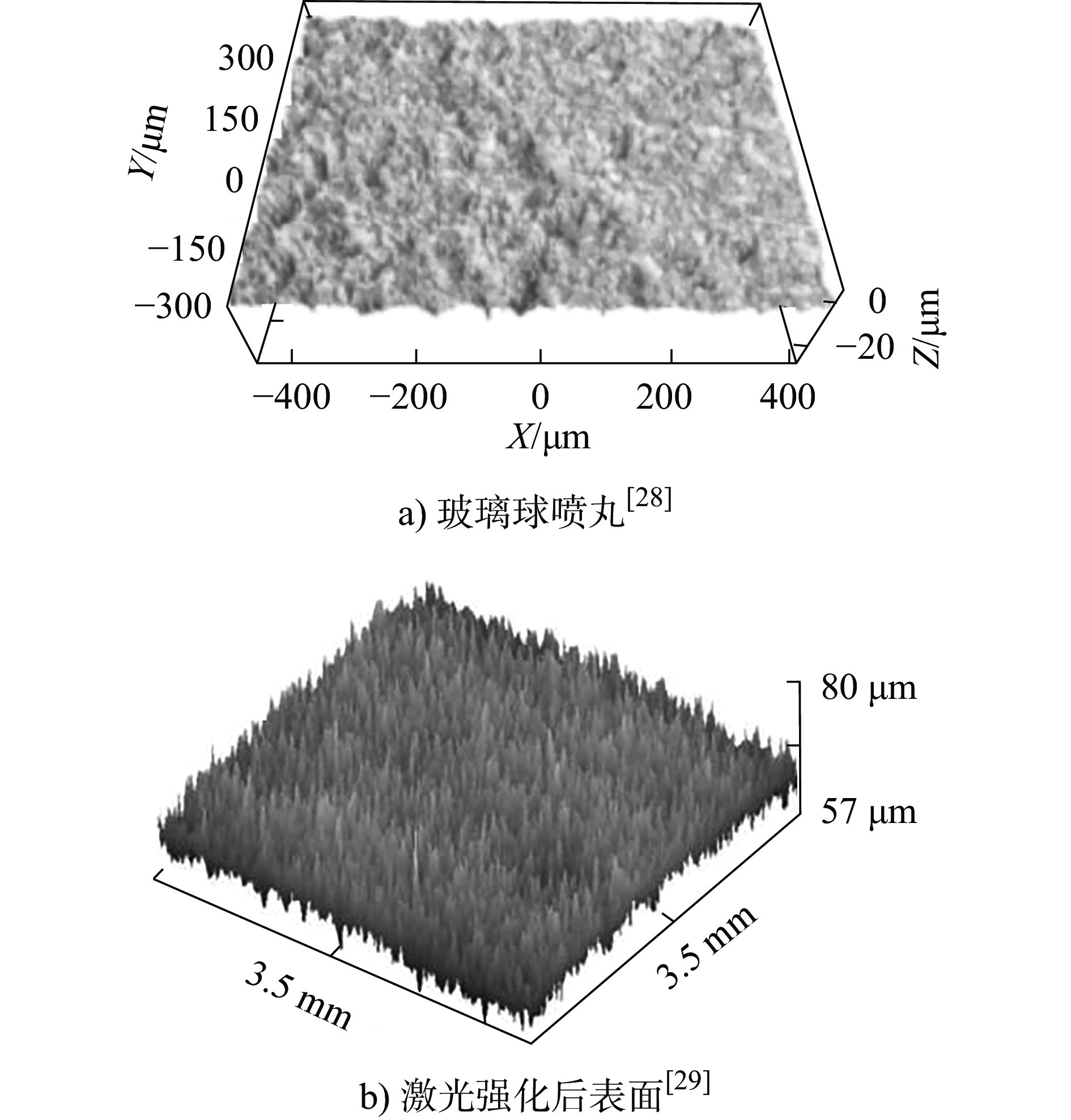
Blade is the core component of aero engine, and its working conditions put forward the higher requirements for machining accuracy and surface integrity. According to the forming technology of milling blade, the typical structure of blade and the surface state before polishing are expounded, and the key common difficulties of various polishing techniques are summarized. Taking the surface integrity as the evaluation index, from hand-polishing, grinding wheel grinding, grinding, grinding grain flow, flexible tool grinding, magnetic auxiliary grinding, mass finishing, etc. The domestic and foreign research progress of polishing techniques for aero-engine blades is introduced, and the advantages, disadvantages and application scope of various polishing techniques are compared.
Blade is the core component of aero engine, and its working conditions put forward the higher requirements for machining accuracy and surface integrity. According to the forming technology of milling blade, the typical structure of blade and the surface state before polishing are expounded, and the key common difficulties of various polishing techniques are summarized. Taking the surface integrity as the evaluation index, from hand-polishing, grinding wheel grinding, grinding, grinding grain flow, flexible tool grinding, magnetic auxiliary grinding, mass finishing, etc. The domestic and foreign research progress of polishing techniques for aero-engine blades is introduced, and the advantages, disadvantages and application scope of various polishing techniques are compared.