


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2023 Vol. 42, No. 11
Display Method:
2023, 42(11): 1767-1777.
doi: 10.13433/j.cnki.1003-8728.20220104
 PDF 7560KB
PDF 7560KB
Abstract:
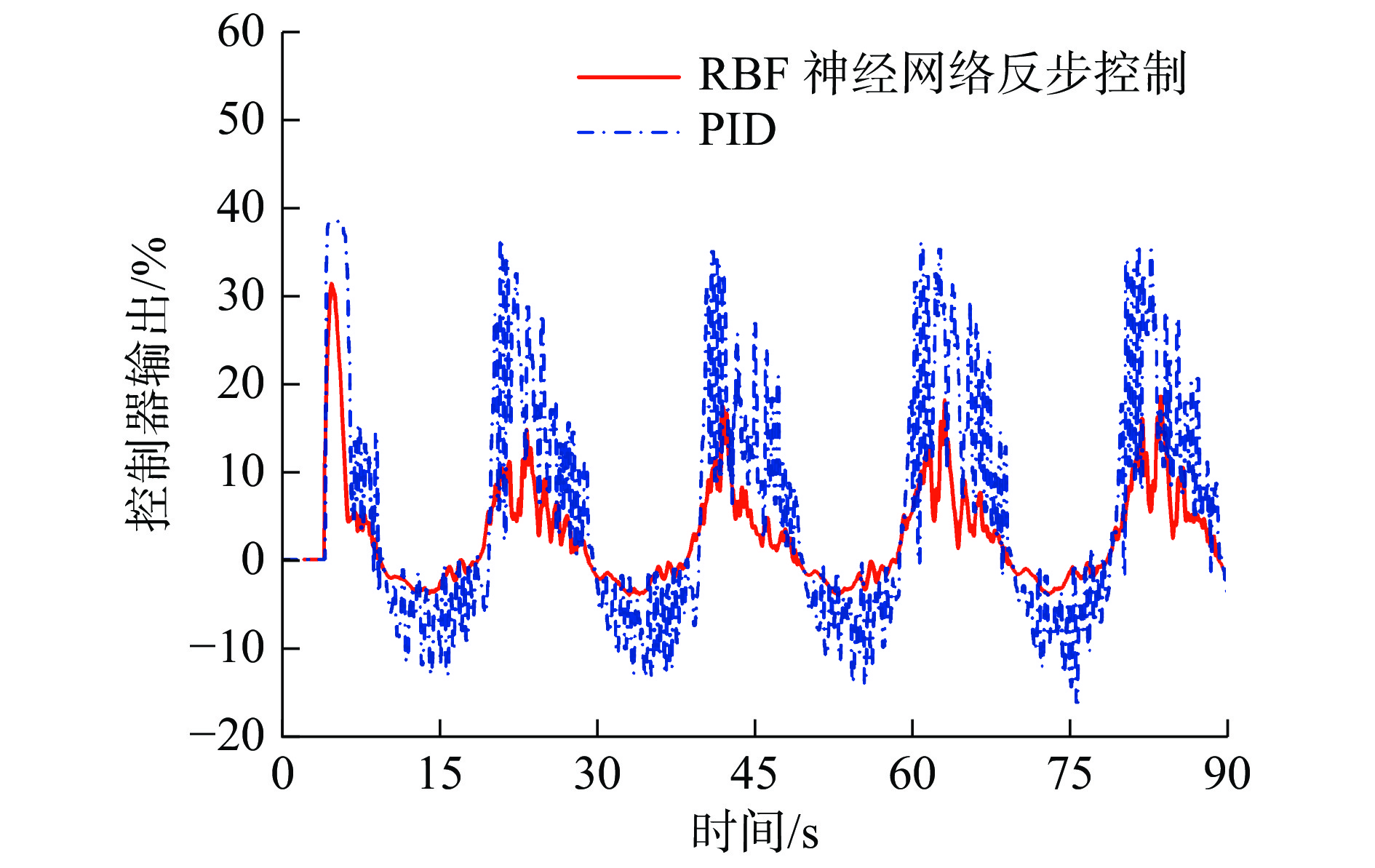
For the problem of control accuracy drop of the electro-hydraulic system used widely in heavy-duty manipulators because of the factors such as nonlinearity and time-varying parameters, a backstepping control method is proposed based on the introducing of Radical Basis Function(RBF) neural network to identify the dynamic load. Taking the hydraulic-driving manipulator of an anchor drilling rig as an example, the mathematical model of the electro-hydraulic system is established. The model consists of three dynamic parts, which are inner state feedback of the system, control driving and outside load driving. The nominal model parameters in the internal state feedback of the system are identified through off-line test due to the relatively slow variation of the parameters. The design of the controller follows the procedure of backstepping method, and the output calculation of the controller needs the estimation of the dynamic load, for which a RBF neural network is adapted. The principle for the update of RBF neural network and the design of controller is based on Lyapunov theory. Many simulations and experiments show that the proposed control method effectively improves the position tracking accuracy of the manipulator, with rapid response and less trajectory error, and relatively smooth and small control output.
For the problem of control accuracy drop of the electro-hydraulic system used widely in heavy-duty manipulators because of the factors such as nonlinearity and time-varying parameters, a backstepping control method is proposed based on the introducing of Radical Basis Function(RBF) neural network to identify the dynamic load. Taking the hydraulic-driving manipulator of an anchor drilling rig as an example, the mathematical model of the electro-hydraulic system is established. The model consists of three dynamic parts, which are inner state feedback of the system, control driving and outside load driving. The nominal model parameters in the internal state feedback of the system are identified through off-line test due to the relatively slow variation of the parameters. The design of the controller follows the procedure of backstepping method, and the output calculation of the controller needs the estimation of the dynamic load, for which a RBF neural network is adapted. The principle for the update of RBF neural network and the design of controller is based on Lyapunov theory. Many simulations and experiments show that the proposed control method effectively improves the position tracking accuracy of the manipulator, with rapid response and less trajectory error, and relatively smooth and small control output.



















2023, 42(11): 1778-1783.
doi: 10.13433/j.cnki.1003-8728.20220117
Abstract:
The power-assisted exoskeleton is a complex mechanical structure with a high degree of integration between man and machine. In order to study the driving torque and power change rules of each joint when the exoskeleton is walking with a weight of 50 kg, this paper takes the third-generation assisted exoskeleton of Southwest Jiaotong University as the research object and establishes an exoskeleton dynamics model. Then, the Lagrangian equation was used to analyze the dynamics of the exoskeleton. In order to realize the carrying movement of the of the exoskeleton and the human body, we used the attitude sensor to measure and analyze the change of the joint angle during the human walking process, and use it as a driving function to simulate the dynamics of the exoskeleton virtual prototype in the ADAMS environment. Finally, we fit the obtained driving torque curve of each joint, and the analysis result can provide a reliable reference for the drive control of the assisted exoskeleton.
The power-assisted exoskeleton is a complex mechanical structure with a high degree of integration between man and machine. In order to study the driving torque and power change rules of each joint when the exoskeleton is walking with a weight of 50 kg, this paper takes the third-generation assisted exoskeleton of Southwest Jiaotong University as the research object and establishes an exoskeleton dynamics model. Then, the Lagrangian equation was used to analyze the dynamics of the exoskeleton. In order to realize the carrying movement of the of the exoskeleton and the human body, we used the attitude sensor to measure and analyze the change of the joint angle during the human walking process, and use it as a driving function to simulate the dynamics of the exoskeleton virtual prototype in the ADAMS environment. Finally, we fit the obtained driving torque curve of each joint, and the analysis result can provide a reliable reference for the drive control of the assisted exoskeleton.













2023, 42(11): 1784-1793.
doi: 10.13433/j.cnki.1003-8728.20220156
Abstract:
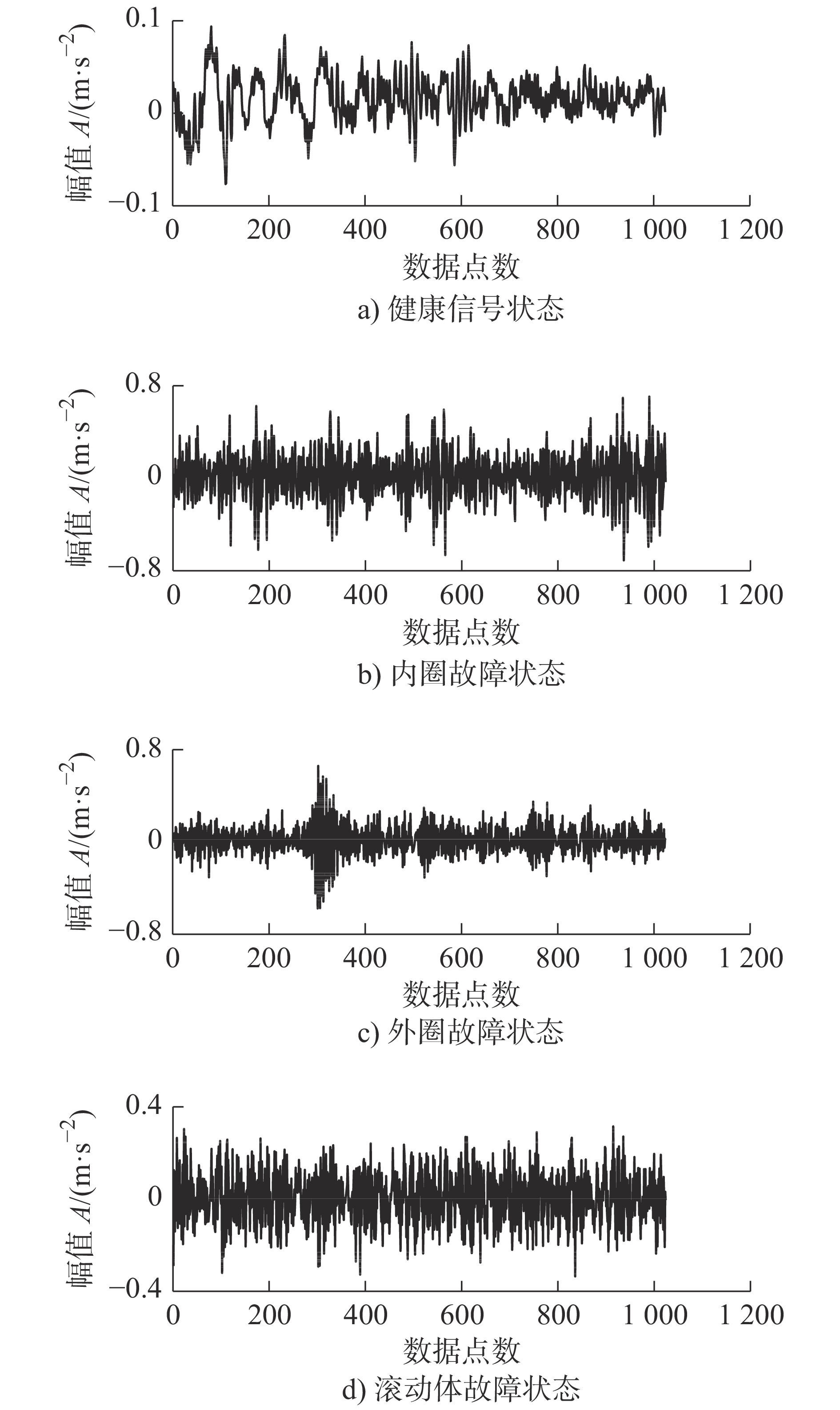
To identify the fault state of rolling bearing accurately, a diagnosis method is proposed which is based on ensemble empirical mode decomposition (EEMD) and t-distribution stochastic neighborhood embedding (t-SNE). Firstly, EEMD is used to decompose vibration fault signal to obtain several intrinsic mode functions (IMF), and the kurtosis criterion is used to select effective IMF components and reconstruct them. Secondly, the high dimensional time-frequency characteristic matrix of the reconstructed signal is obtained and normalized, and a low dimensional characteristic matrix which is more sensitive to fault states is obtained by t-SNE algorithm. Finally, characteristic matrix is input into the least squares support vector machine (LSSVM) classifier which is optimized by particle swarm optimization algorithm to realize the fault state recognition and diagnosis of bearing. In the case analysis, the bearing state data of Western Reserve University and MFPT is used, results show that the advantages of t-SNE by comparing several typical dimension reduction methods and the proposed method can realize 100% fault recognition.
To identify the fault state of rolling bearing accurately, a diagnosis method is proposed which is based on ensemble empirical mode decomposition (EEMD) and t-distribution stochastic neighborhood embedding (t-SNE). Firstly, EEMD is used to decompose vibration fault signal to obtain several intrinsic mode functions (IMF), and the kurtosis criterion is used to select effective IMF components and reconstruct them. Secondly, the high dimensional time-frequency characteristic matrix of the reconstructed signal is obtained and normalized, and a low dimensional characteristic matrix which is more sensitive to fault states is obtained by t-SNE algorithm. Finally, characteristic matrix is input into the least squares support vector machine (LSSVM) classifier which is optimized by particle swarm optimization algorithm to realize the fault state recognition and diagnosis of bearing. In the case analysis, the bearing state data of Western Reserve University and MFPT is used, results show that the advantages of t-SNE by comparing several typical dimension reduction methods and the proposed method can realize 100% fault recognition.










2023, 42(11): 1794-1800.
doi: 10.13433/j.cnki.1003-8728.20220137
Abstract:
Aiming at the problem that the fault of switch equipment occurs frequently and the staff can not accurately evaluate and predict its health state, the health state evaluation and prediction method of switch equipment combined with SOM-LSTM hybrid neural network is studied. Firstly, according to the characteristics of switch action power curve, the time-domain characteristic parameters are extracted in three segments, and the Health Index (HI) of switch equipment is solved by using the minimum quantization error in Self Organizing Map (SOM); Then the Long Short-term Memory Networks (LSTM) is used to predict the subsequent Health Index curve of switch equipment; Finally, the effectiveness of the algorithm is verified by using the field data. The experimental results show that SOM algorithm can effectively track the change law of health state of switch equipment and realize the rapid and accurate calculation of Health Index; Compared with Back Propagation (BP) neural network and Recurrent Neural Network (RNN) neural network, LSTM algorithm has better prediction effect and improved accuracy, which has certain guiding significance for the health management of switch equipment.
Aiming at the problem that the fault of switch equipment occurs frequently and the staff can not accurately evaluate and predict its health state, the health state evaluation and prediction method of switch equipment combined with SOM-LSTM hybrid neural network is studied. Firstly, according to the characteristics of switch action power curve, the time-domain characteristic parameters are extracted in three segments, and the Health Index (HI) of switch equipment is solved by using the minimum quantization error in Self Organizing Map (SOM); Then the Long Short-term Memory Networks (LSTM) is used to predict the subsequent Health Index curve of switch equipment; Finally, the effectiveness of the algorithm is verified by using the field data. The experimental results show that SOM algorithm can effectively track the change law of health state of switch equipment and realize the rapid and accurate calculation of Health Index; Compared with Back Propagation (BP) neural network and Recurrent Neural Network (RNN) neural network, LSTM algorithm has better prediction effect and improved accuracy, which has certain guiding significance for the health management of switch equipment.








2023, 42(11): 1801-1810.
doi: 10.13433/j.cnki.1003-8728.20220118
Abstract:
In view of the active and passive motion characteristics and force compatibility of vehicle side door latch with power release under multi-working conditions, a new kind of spatial compliant mechanism based on the compliant joint with variable topology is proposed and constructed as the power release mechanism in vehicle latch. The spatial compliant mechanism switches automatically among four motion modes according to different drives and limit conditions. The groove endpoint of the linkage is taken as a characteristic point of the mechanism to describe the spatial motion feature, compliant feature and mode switching feature. According to the visual analysis of phase diagrams and trajectory of the characteristic point, it is found that the compliant joint stiffness kT is a key parameter affecting the motion stability of the mechanism. The largest Lyapunov exponent is used as an evaluation index for the dynamic system stability of the mechanism to measure the motion stability of the spatial compliant mechanism. Based on three-dimensional trajectory of the characteristic point of groove-linkage with time scale, time-varying displacement sequence is constructed, which is used to calculate the largest Lyapunov exponent by using the Wolf algorithm. Finally, the key parameter kT is obtained to ensure the stability of the mechanism.
In view of the active and passive motion characteristics and force compatibility of vehicle side door latch with power release under multi-working conditions, a new kind of spatial compliant mechanism based on the compliant joint with variable topology is proposed and constructed as the power release mechanism in vehicle latch. The spatial compliant mechanism switches automatically among four motion modes according to different drives and limit conditions. The groove endpoint of the linkage is taken as a characteristic point of the mechanism to describe the spatial motion feature, compliant feature and mode switching feature. According to the visual analysis of phase diagrams and trajectory of the characteristic point, it is found that the compliant joint stiffness kT is a key parameter affecting the motion stability of the mechanism. The largest Lyapunov exponent is used as an evaluation index for the dynamic system stability of the mechanism to measure the motion stability of the spatial compliant mechanism. Based on three-dimensional trajectory of the characteristic point of groove-linkage with time scale, time-varying displacement sequence is constructed, which is used to calculate the largest Lyapunov exponent by using the Wolf algorithm. Finally, the key parameter kT is obtained to ensure the stability of the mechanism.












2023, 42(11): 1811-1820.
doi: 10.13433/j.cnki.1003-8728.20220138
Abstract:
In order to solve the problem that the inverse kinematics solution of continuous robot is complex and inefficient, a kinematics model based on the plane circular method is proposed, which has the characteristics of simple and efficient for inverse kinematics solution. The method is used to fit the shape of the bending motion of the continuous robot in the plane and the kinematics model for the continuous robot is presented. The mapping relationship between the drive space, joint space and operation space are analyzed and the workspace is described. The geometric constraints of the curved shape in the plane of the continuous robot are analyzed, and the mathematical relationship between the joint space variables is established to reduce the difficulty of the complex inverse kinematics problems. The position of end-effector and the change of drive line length are simulated and the effective solution of the inverse kinematics is solved. The correctness of the kinematics model and the effectiveness of the inverse kinematics solution are verified by using the prototype experiment.
In order to solve the problem that the inverse kinematics solution of continuous robot is complex and inefficient, a kinematics model based on the plane circular method is proposed, which has the characteristics of simple and efficient for inverse kinematics solution. The method is used to fit the shape of the bending motion of the continuous robot in the plane and the kinematics model for the continuous robot is presented. The mapping relationship between the drive space, joint space and operation space are analyzed and the workspace is described. The geometric constraints of the curved shape in the plane of the continuous robot are analyzed, and the mathematical relationship between the joint space variables is established to reduce the difficulty of the complex inverse kinematics problems. The position of end-effector and the change of drive line length are simulated and the effective solution of the inverse kinematics is solved. The correctness of the kinematics model and the effectiveness of the inverse kinematics solution are verified by using the prototype experiment.

















2023, 42(11): 1821-1828.
doi: 10.13433/j.cnki.1003-8728.20220172
Abstract:
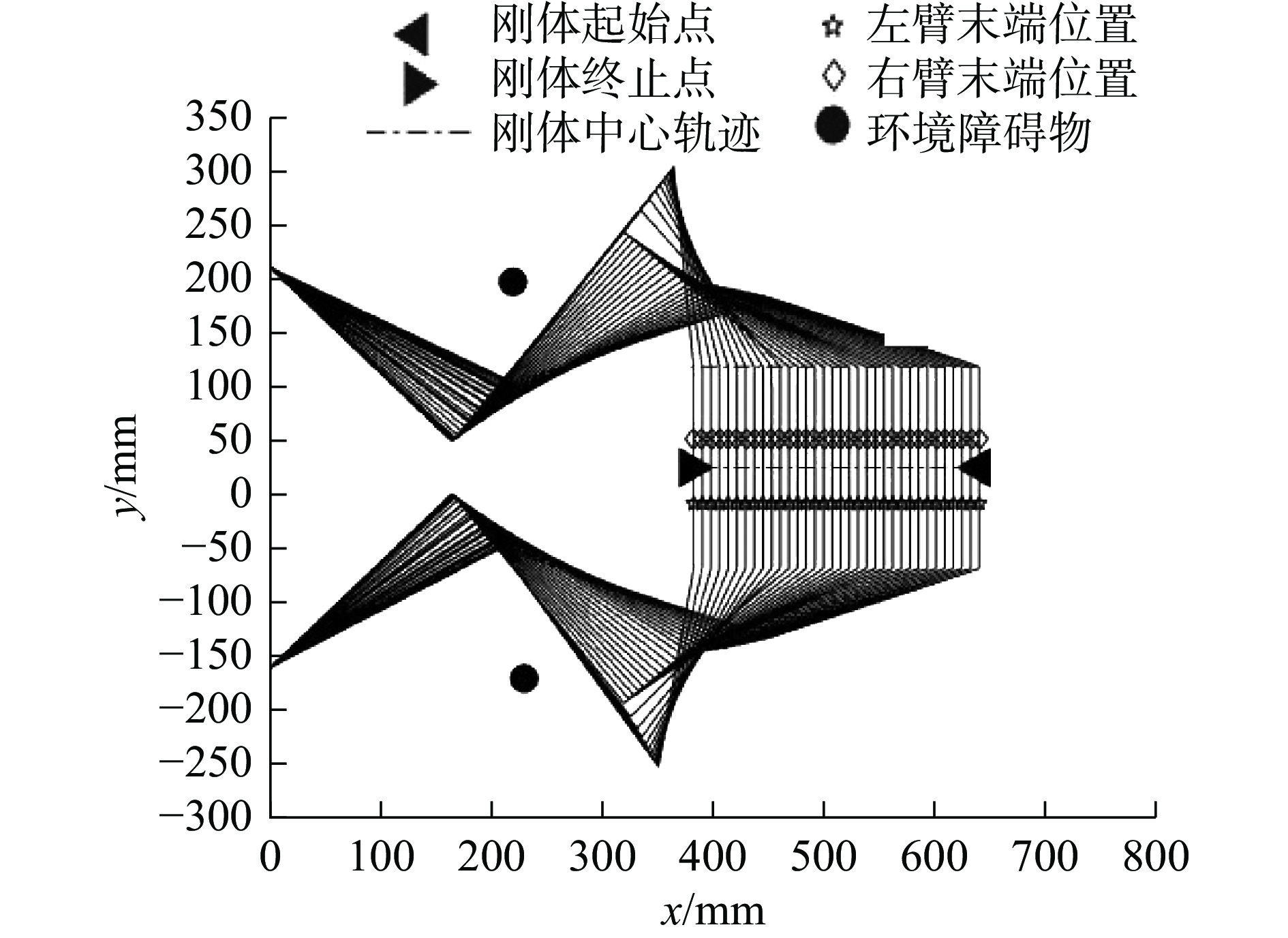
Aiming at the coordinated self-avoidance and avoiding environmental obstacles by redundant dual-arm robots, a real-time obstacle avoidance algorithm based on the self-motion characteristics of redundant manipulators is proposed. Firstly, the projection vector of the obstacle on the manipulator link is used to screen out the non-collision avoidance bar, and then the shortest distance between the possible collision avoidance rod and the obstacle is calculated. Then, according to the kinematic constraint relationship of dual arm cooperation, the inverse kinematics solution of the coordinated handling and obstacle avoidance of redundant dual arm robot is obtained. Then the gradient "safe distance" and two obstacle avoidance factors are introduced, to change the obstacle avoidance speed of the manipulator in real time, the robot terminal can complete the cooperative task and the task of real-time self-collision avoidance and avoidance of environmental obstacles. The results show that both arms of the robot can avoid obstacles while the end effector of the dual arm robot performs cooperative tasks, and each joint moves continuously and smoothly.
Aiming at the coordinated self-avoidance and avoiding environmental obstacles by redundant dual-arm robots, a real-time obstacle avoidance algorithm based on the self-motion characteristics of redundant manipulators is proposed. Firstly, the projection vector of the obstacle on the manipulator link is used to screen out the non-collision avoidance bar, and then the shortest distance between the possible collision avoidance rod and the obstacle is calculated. Then, according to the kinematic constraint relationship of dual arm cooperation, the inverse kinematics solution of the coordinated handling and obstacle avoidance of redundant dual arm robot is obtained. Then the gradient "safe distance" and two obstacle avoidance factors are introduced, to change the obstacle avoidance speed of the manipulator in real time, the robot terminal can complete the cooperative task and the task of real-time self-collision avoidance and avoidance of environmental obstacles. The results show that both arms of the robot can avoid obstacles while the end effector of the dual arm robot performs cooperative tasks, and each joint moves continuously and smoothly.













2023, 42(11): 1829-1836.
doi: 10.13433/j.cnki.1003-8728.20220110
Abstract:
Aiming at the problems of low accuracy of fault diagnosis of rolling bearing under different loads and scarcity of samples, this paper proposes a semi-supervised transfer learning (PSO-SSTCA) algorithm based on particle swarm optimization. On the basis of the transfer learning algorithm, the Hilbert-Schmidt independence coefficient (HSIC) is introduced to enhance the dependence of different data labels in the transfer learning process, and the particle swarm optimization algorithm is added to adaptively find the optimal coefficients of the multi-core function. The intra-class spacing of the data set is reduced, and the K-nearest neighbour algorithm is used for fault diagnosis of rolling bearings between different loads. The analysis of rolling bearing vibration signals under four different load conditions shows that the average accuracy of the PSO-SSTCA algorithm is 85.92% and 88% respectively under single-single and multiple-single load conditions, which are lower than the original weight. Compared with the reconstructed signal, it increased by 10.75% and 19.42% respectively. This method effectively provides technical support for the condition monitoring and fault diagnosis of mechanical equipment.
Aiming at the problems of low accuracy of fault diagnosis of rolling bearing under different loads and scarcity of samples, this paper proposes a semi-supervised transfer learning (PSO-SSTCA) algorithm based on particle swarm optimization. On the basis of the transfer learning algorithm, the Hilbert-Schmidt independence coefficient (HSIC) is introduced to enhance the dependence of different data labels in the transfer learning process, and the particle swarm optimization algorithm is added to adaptively find the optimal coefficients of the multi-core function. The intra-class spacing of the data set is reduced, and the K-nearest neighbour algorithm is used for fault diagnosis of rolling bearings between different loads. The analysis of rolling bearing vibration signals under four different load conditions shows that the average accuracy of the PSO-SSTCA algorithm is 85.92% and 88% respectively under single-single and multiple-single load conditions, which are lower than the original weight. Compared with the reconstructed signal, it increased by 10.75% and 19.42% respectively. This method effectively provides technical support for the condition monitoring and fault diagnosis of mechanical equipment.




2023, 42(11): 1837-1843.
doi: 10.13433/j.cnki.1003-8728.20220105
Abstract:
Because the teleoperation control of a traditional manipulator has poor intuition and cumbersome operation, the teleoperation control method of a manipulator based on optical motion capture is proposed in this paper. The calibration model of motion capture system and manipulator is established, and the transformation between coordinate systems is realized. The server and client are established with the kinetics of a robot operating system to realize the mutual transformation and real-time transmission of data between different systems. The results show that this method reduces the complexity of the master end and can complete the teleoperation task of the 6-DOF manipulator in real time under the condition of ensuring the operation accuracy of the slave end. The method has the advantage of simple operation, strong portability and expansibility.
Because the teleoperation control of a traditional manipulator has poor intuition and cumbersome operation, the teleoperation control method of a manipulator based on optical motion capture is proposed in this paper. The calibration model of motion capture system and manipulator is established, and the transformation between coordinate systems is realized. The server and client are established with the kinetics of a robot operating system to realize the mutual transformation and real-time transmission of data between different systems. The results show that this method reduces the complexity of the master end and can complete the teleoperation task of the 6-DOF manipulator in real time under the condition of ensuring the operation accuracy of the slave end. The method has the advantage of simple operation, strong portability and expansibility.











2023, 42(11): 1844-1851.
doi: 10.13433/j.cnki.1003-8728.20220130
Abstract:
The geometric parameters of the double-scroll compressor that meets a certain thermal performance can have an infinite number of groups, but the dynamic performance of scrolls constructed from different geometric parameters is very different. How to optimize the geometric parameters of the scroll to improve its power performance becomes a design difficulty. For this reason, an optimization method of scroll geometric parameters based on particle swarm optimization is proposed. Taking the centrifugal inertial force as the optimization objective, it is optimized by MATLAB software, and the influence of the geometrical parameters of the profile on the centrifugal inertial force, axial gas force, radial gas force, tangent gas force and capsizing moment is analyzed. The results show that the centrifugal inertial force experienced by the scroll is reduced after optimization, and the centrifugal inertial force decreases even more at high speed. After optimization, the axial gas force received by the scroll is reduced, and the axial gas force pulsation amplitude does not change significantly. And blindly pursuing a smaller scroll diameter will increase the capsizing moment of the scroll. This optimization method can provide a reference for the design of the double-wrap scroll.
The geometric parameters of the double-scroll compressor that meets a certain thermal performance can have an infinite number of groups, but the dynamic performance of scrolls constructed from different geometric parameters is very different. How to optimize the geometric parameters of the scroll to improve its power performance becomes a design difficulty. For this reason, an optimization method of scroll geometric parameters based on particle swarm optimization is proposed. Taking the centrifugal inertial force as the optimization objective, it is optimized by MATLAB software, and the influence of the geometrical parameters of the profile on the centrifugal inertial force, axial gas force, radial gas force, tangent gas force and capsizing moment is analyzed. The results show that the centrifugal inertial force experienced by the scroll is reduced after optimization, and the centrifugal inertial force decreases even more at high speed. After optimization, the axial gas force received by the scroll is reduced, and the axial gas force pulsation amplitude does not change significantly. And blindly pursuing a smaller scroll diameter will increase the capsizing moment of the scroll. This optimization method can provide a reference for the design of the double-wrap scroll.

















2023, 42(11): 1852-1859.
doi: 10.13433/j.cnki.1003-8728.20220161
Abstract:
Unreasonable weights of position and orientation data in a robot pose calibration model may lead to low accuracy or even divergence of parameter identification. A robot pose calibration method is presented directly based on the position measurement of an end-effector, avoiding the influence of different magnitudes of position and orientation data on parameter identification accuracy. A robot's kinematic model based on three-point position information is established by using the product of exponential formula. By differentiating the kinematic model and then employing the explicit expression of differentials of exponential mapping, the explicit expression of the mapping relationship between three-point position errors of the end-effector and its geometric parameter errors is derived, and the parameter error identification method is introduced. By taking a laser tracker as the measuring equipment, the UR5 robot is used to perform the kinematic parameter calibration and verification tests. The results indicate that the mean values of the modulus of position error and orientation error are reduced by 90% and 92%, respectively.
Unreasonable weights of position and orientation data in a robot pose calibration model may lead to low accuracy or even divergence of parameter identification. A robot pose calibration method is presented directly based on the position measurement of an end-effector, avoiding the influence of different magnitudes of position and orientation data on parameter identification accuracy. A robot's kinematic model based on three-point position information is established by using the product of exponential formula. By differentiating the kinematic model and then employing the explicit expression of differentials of exponential mapping, the explicit expression of the mapping relationship between three-point position errors of the end-effector and its geometric parameter errors is derived, and the parameter error identification method is introduced. By taking a laser tracker as the measuring equipment, the UR5 robot is used to perform the kinematic parameter calibration and verification tests. The results indicate that the mean values of the modulus of position error and orientation error are reduced by 90% and 92%, respectively.






2023, 42(11): 1860-1866.
doi: 10.13433/j.cnki.1003-8728.20220154
Abstract:
Aiming at the problems that the permanent magnet motor of the nuclear-powered submarine under low-speed cruise has high vibration reduction requirements and the magnetic interference make it difficult to control the unbalance by the balancing machine, an analytical method for reducing the unbalanced vibration response of rotor structures is proposed by improving machining process accuracy, to meet to good disguise requirement of the submarine. Firstly, according to the processing technology, a tolerance model for five typical machining processes is constructed, and the intrinsic relationship between machining tolerances and rotor unbalance is revealed. Then, the finite element method is used to establish the dynamic model under the unbalanced excitation of the rotor. The vibration response map of the rotor is obtained by the steady-state synchronous response analysis. Finally, according to the vibration response value, the influence degree of the machining process on the rotor vibration is evaluated, find out the crucible state 89 r/min rated speed motor shaft coaxiality processing accuracy has the greatest impact on the motor vibration amplitude, and the influence of the flatness of the shaft end face is the smallest. The conclusion can provide reference for the selection and optimization of rotor machining accuracy grade under the premise of meeting assembly requirements.
Aiming at the problems that the permanent magnet motor of the nuclear-powered submarine under low-speed cruise has high vibration reduction requirements and the magnetic interference make it difficult to control the unbalance by the balancing machine, an analytical method for reducing the unbalanced vibration response of rotor structures is proposed by improving machining process accuracy, to meet to good disguise requirement of the submarine. Firstly, according to the processing technology, a tolerance model for five typical machining processes is constructed, and the intrinsic relationship between machining tolerances and rotor unbalance is revealed. Then, the finite element method is used to establish the dynamic model under the unbalanced excitation of the rotor. The vibration response map of the rotor is obtained by the steady-state synchronous response analysis. Finally, according to the vibration response value, the influence degree of the machining process on the rotor vibration is evaluated, find out the crucible state 89 r/min rated speed motor shaft coaxiality processing accuracy has the greatest impact on the motor vibration amplitude, and the influence of the flatness of the shaft end face is the smallest. The conclusion can provide reference for the selection and optimization of rotor machining accuracy grade under the premise of meeting assembly requirements.










2023, 42(11): 1867-1871.
doi: 10.13433/j.cnki.1003-8728.20220166
Abstract:
A gear tooth root has non-penetrating three-dimensional cracks, its stress intensity factor calculation is difficult and the process is complex. In this study, the three-dimensional crack problem is transformed into a series of "equivalent" two-dimensional crack problems of thin section element by using the weight function method of strip composition. According to the normal force acting on tooth root, the normal force acting on each thin section element was calculated based on its meshing stiffness, and then the crack stress intensity factor of each thin section element was calculated by using the two-dimensional crack weight function method. The calculated results of the "equivalent" solution are in good agreement with those of finite element method, and the maximum error is 3.9%.
A gear tooth root has non-penetrating three-dimensional cracks, its stress intensity factor calculation is difficult and the process is complex. In this study, the three-dimensional crack problem is transformed into a series of "equivalent" two-dimensional crack problems of thin section element by using the weight function method of strip composition. According to the normal force acting on tooth root, the normal force acting on each thin section element was calculated based on its meshing stiffness, and then the crack stress intensity factor of each thin section element was calculated by using the two-dimensional crack weight function method. The calculated results of the "equivalent" solution are in good agreement with those of finite element method, and the maximum error is 3.9%.






2023, 42(11): 1872-1879.
doi: 10.13433/j.cnki.1003-8728.20220140
Abstract:
A large number of root samples of saw-tooth chip are obtained by using the root cutting test, the clear pictures of saw-tooth chip root microstructure are obtained after metallographic processing. Based on the deformation of the chip root microstructure, the formation process and mechanism of saw-tooth chip are analyzed, and the model for saw-tooth chip formation process is established. The results show that the saw-tooth chip formation process can be divided into the accumulation of shear extrusion deformation and formation of initial shear plane in the first deformation zone, the separation of chip free surface from cutting layer free surface and formation of shear plane, the saw-tooth element overall shear slip in the first and second deformation zone. Formation of the saw-tooth chip is caused by the thermoplastic instability of the material near the tool tip in the first deformation zone. There are the cracks in the adiabatic shear band and on the surface of the cutting layer. The cracks are generated in the overall shear slip stage of the saw-tooth element, and the cracks are more likely to occur near the surface of the cutting layer.
A large number of root samples of saw-tooth chip are obtained by using the root cutting test, the clear pictures of saw-tooth chip root microstructure are obtained after metallographic processing. Based on the deformation of the chip root microstructure, the formation process and mechanism of saw-tooth chip are analyzed, and the model for saw-tooth chip formation process is established. The results show that the saw-tooth chip formation process can be divided into the accumulation of shear extrusion deformation and formation of initial shear plane in the first deformation zone, the separation of chip free surface from cutting layer free surface and formation of shear plane, the saw-tooth element overall shear slip in the first and second deformation zone. Formation of the saw-tooth chip is caused by the thermoplastic instability of the material near the tool tip in the first deformation zone. There are the cracks in the adiabatic shear band and on the surface of the cutting layer. The cracks are generated in the overall shear slip stage of the saw-tooth element, and the cracks are more likely to occur near the surface of the cutting layer.













2023, 42(11): 1880-1886.
doi: 10.13433/j.cnki.1003-8728.20230298
Abstract:
Uneven thickness distribution and excessive thinning easily lead to sheet fractures and forming failures when forming thin-walled parts with complex shapes in a single pass by using single-point incremental forming process. Hydrostatic supporting was introduced into the single-point incremental forming, and a single-point incremental forming process with hydrostatic supporting was formed; the uniformity of the sheet thickness distribution was improved by promoting material flow and thickness strain distribution. The 1060 aluminum sheets with an initial thickness of 1mm were selected, and the hydrostatically supported single-point incremental forming conical parts were taken as the research objects, and the influence of the hydrostatic parameters on the thickness strain distribution and material flow laws were analyzed by using numerical simulation and experiments. The results show that hydrostatic supports of 0-0.18 MPa are favorable to the rapid forming in the transition deformation zone II and the thickness strain distribution in the main deformation zone III; within the favorable pressure range, the higher the hydrostatic pressure, the more material flows from zone II to zone III, the more uniform the thickness strain distribution and the better the forming performance of the parts.
Uneven thickness distribution and excessive thinning easily lead to sheet fractures and forming failures when forming thin-walled parts with complex shapes in a single pass by using single-point incremental forming process. Hydrostatic supporting was introduced into the single-point incremental forming, and a single-point incremental forming process with hydrostatic supporting was formed; the uniformity of the sheet thickness distribution was improved by promoting material flow and thickness strain distribution. The 1060 aluminum sheets with an initial thickness of 1mm were selected, and the hydrostatically supported single-point incremental forming conical parts were taken as the research objects, and the influence of the hydrostatic parameters on the thickness strain distribution and material flow laws were analyzed by using numerical simulation and experiments. The results show that hydrostatic supports of 0-0.18 MPa are favorable to the rapid forming in the transition deformation zone II and the thickness strain distribution in the main deformation zone III; within the favorable pressure range, the higher the hydrostatic pressure, the more material flows from zone II to zone III, the more uniform the thickness strain distribution and the better the forming performance of the parts.













2023, 42(11): 1887-1894.
doi: 10.13433/j.cnki.1003-8728.20220159
Abstract:
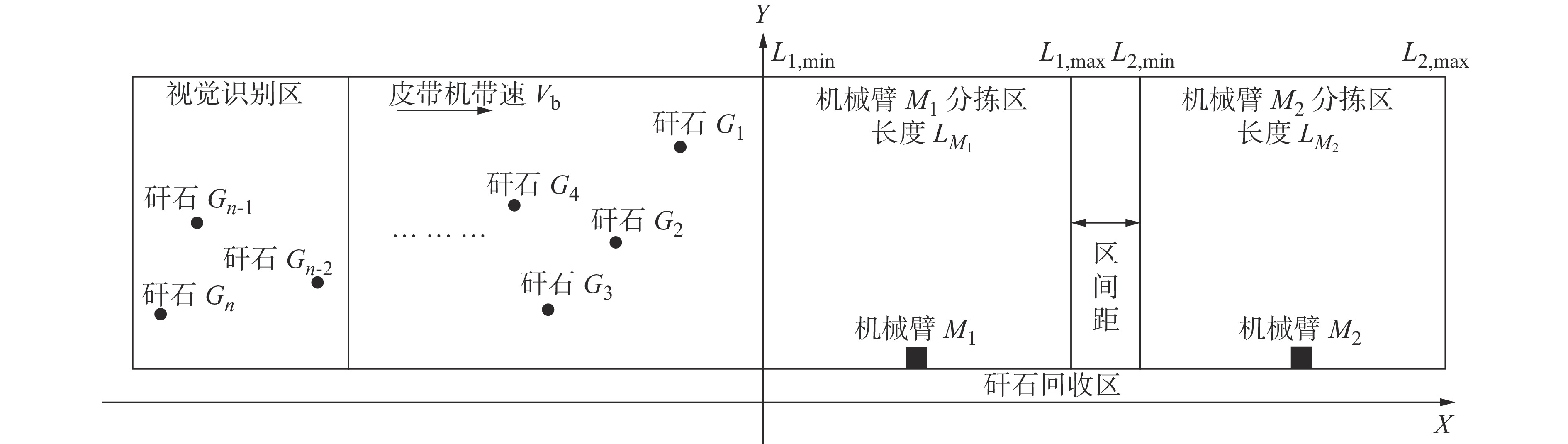
In the process of coal production, the time varying of raw coal gangue rate causes low sorting efficiency. With the factors such as gangue quality, gangue recognition and manipulator sorting time considered, this paper uses the multi-factor fusion benefit matrix to optimize the multi-manipulator gangue sorting strategy under the condition of time-varying gangue rate. A multi-manipulator cooperative strategy model based on the benefit matrix was proposed. The sorting efficiency and the sorting gangue rate were used as evaluation criteria. A small sample gangue flow model is constructed by using the similarity principle. The element parameters of the benefit matrix are quantified with the entropy weight method. The experimental results show that the multi-manipulator cooperative strategy optimization method can effectively solve the gangue task allocation problem when the number of gangues is large. The gangue sorting rate and the sorted coal quality are effectively improved.
In the process of coal production, the time varying of raw coal gangue rate causes low sorting efficiency. With the factors such as gangue quality, gangue recognition and manipulator sorting time considered, this paper uses the multi-factor fusion benefit matrix to optimize the multi-manipulator gangue sorting strategy under the condition of time-varying gangue rate. A multi-manipulator cooperative strategy model based on the benefit matrix was proposed. The sorting efficiency and the sorting gangue rate were used as evaluation criteria. A small sample gangue flow model is constructed by using the similarity principle. The element parameters of the benefit matrix are quantified with the entropy weight method. The experimental results show that the multi-manipulator cooperative strategy optimization method can effectively solve the gangue task allocation problem when the number of gangues is large. The gangue sorting rate and the sorted coal quality are effectively improved.






2023, 42(11): 1895-1903.
doi: 10.13433/j.cnki.1003-8728.20220103
Abstract:
Tool condition monitoring is one of the key technologies to improve the intelligent process of CNC machine tools. The status of the tool affects the surface quality and efficiency of the processing directly. During the machining process, the slightly tipping of tool is not easy to detect, but it has a greater impact on the surface quality of the workpiece. To solve this problem, a method based on a multi-scale convolutional capsule network is proposed to monitor whether the tool is slightly chipped. Firstly, the vibration signal is collected to characterize the state of the tool, and then the signal features are extracted in the model through a multi-scale convolutional layer initially, and then the features are encapsulated into the capsule layer to explore the hidden information in the features, and finally the classification layer is used to identify the tool status whether micro chipping occurs under different cutting parameters. The experimental results show that the method can accurately identify the chipping of the cutting edge under different working conditions in a noisy environment, and the recognition accuracy is better than that of CNN (Convolutional neural network) and WDCNN(Convolution neural network with wide first-layer kernels).
Tool condition monitoring is one of the key technologies to improve the intelligent process of CNC machine tools. The status of the tool affects the surface quality and efficiency of the processing directly. During the machining process, the slightly tipping of tool is not easy to detect, but it has a greater impact on the surface quality of the workpiece. To solve this problem, a method based on a multi-scale convolutional capsule network is proposed to monitor whether the tool is slightly chipped. Firstly, the vibration signal is collected to characterize the state of the tool, and then the signal features are extracted in the model through a multi-scale convolutional layer initially, and then the features are encapsulated into the capsule layer to explore the hidden information in the features, and finally the classification layer is used to identify the tool status whether micro chipping occurs under different cutting parameters. The experimental results show that the method can accurately identify the chipping of the cutting edge under different working conditions in a noisy environment, and the recognition accuracy is better than that of CNN (Convolutional neural network) and WDCNN(Convolution neural network with wide first-layer kernels).







2023, 42(11): 1904-1911.
doi: 10.13433/j.cnki.1003-8728.20220135
Abstract:
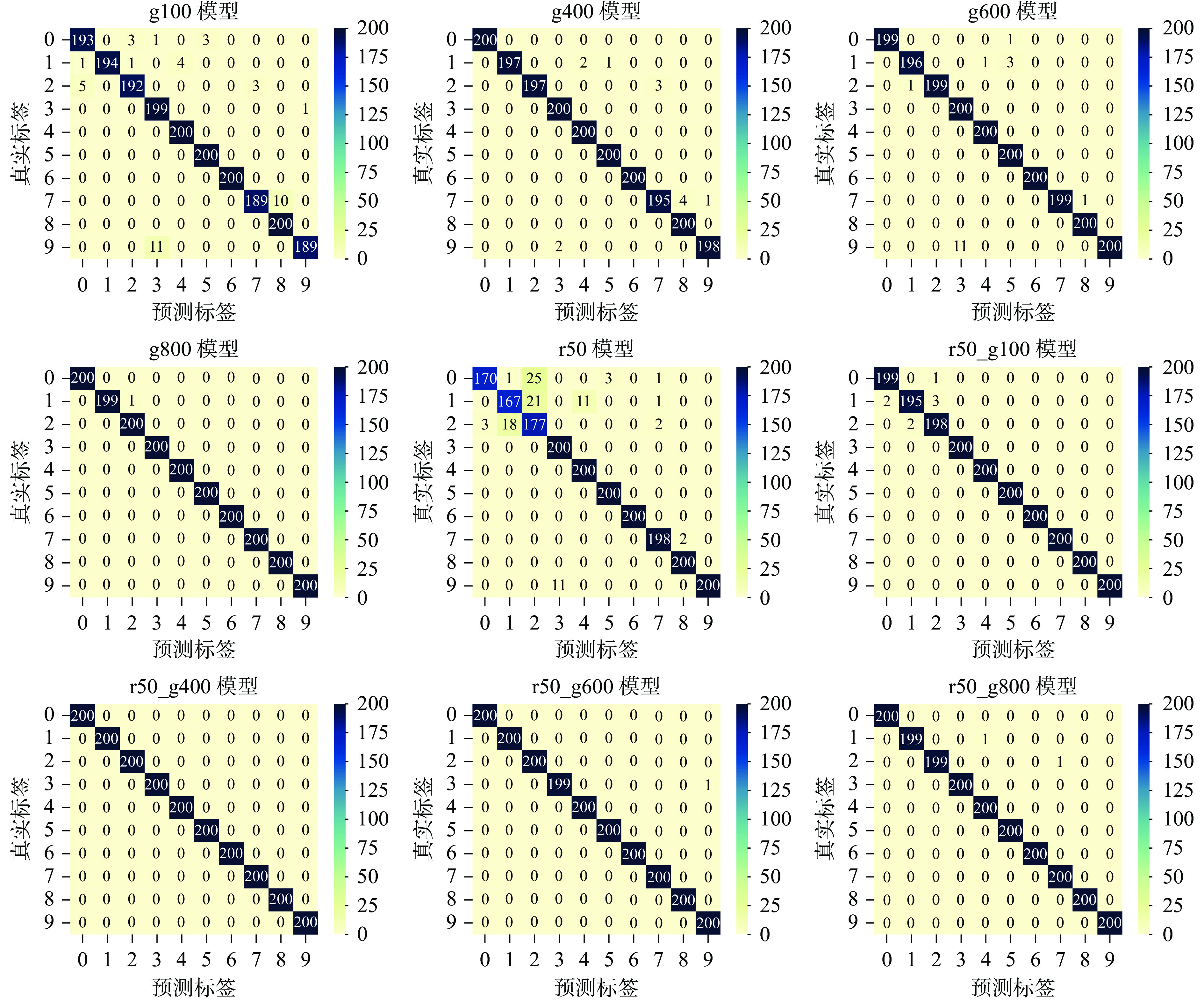
In the fault diagnosis of practical intelligent equipment, it is often difficult to obtain a large number of fault samples, which has an inestimable impact on the classification accuracy of fault diagnosis based on machine learning. In order to improve the accuracy of fault diagnosis in the case of small samples, a generation model (AGAN-GP) based on conditional generative adversarial networks was proposed for data enhancement to obtain sufficient fault samples. AGAN-GP used two-dimensional convolution to learn the distribution characteristics of two-dimensional fault samples obtained after preprocessing, generated samples similar to real samples, used Wasserstein distance and gradient penalty (GP) strategy to solve the problems in model training, and input the label information of fault samples into the model to guide the model to generate specific fault samples. Implementing a model can generate a variety of fault samples and be verified on CWRU bearing data set. The research result shows that the proposed model can generate high-quality samples with similar characteristics to the real samples, and can effectively improve the recognition rate of fault diagnosis in the case of small samples.
In the fault diagnosis of practical intelligent equipment, it is often difficult to obtain a large number of fault samples, which has an inestimable impact on the classification accuracy of fault diagnosis based on machine learning. In order to improve the accuracy of fault diagnosis in the case of small samples, a generation model (AGAN-GP) based on conditional generative adversarial networks was proposed for data enhancement to obtain sufficient fault samples. AGAN-GP used two-dimensional convolution to learn the distribution characteristics of two-dimensional fault samples obtained after preprocessing, generated samples similar to real samples, used Wasserstein distance and gradient penalty (GP) strategy to solve the problems in model training, and input the label information of fault samples into the model to guide the model to generate specific fault samples. Implementing a model can generate a variety of fault samples and be verified on CWRU bearing data set. The research result shows that the proposed model can generate high-quality samples with similar characteristics to the real samples, and can effectively improve the recognition rate of fault diagnosis in the case of small samples.










2023, 42(11): 1912-1918.
doi: 10.13433/j.cnki.1003-8728.20220107
Abstract:
In view of the weak features of early fault of rolling bearings, an early fault diagnosis method of rolling bearings is proposed, which combines adaptive noise complete set empirical mode decomposition (CEEMDAN) with multiscale permutation entropy (MPE) to extract fault features, and uses support vector machine (SVM) to identify the fault state. The originalsignal is decomposed into several components by CEEMDAN, and the correlation coefficient between each component and the original signal is calculated. The components larger than the threshold of correlation coefficient are reconstructed. The MPE parameters are optimized by PSO algorithm. The MPE value of the reconstructed signal is calculated as the fault feature vector, and the fault state is identified by SVM. The method is applied to XJTU-SY rolling bearing accelerated life test data set, and compared with the results of identifying MPE values as feature vector SVM without optimization of MPE parameters and CEEMDAN decomposition and optimization of MPE parameters, the results show that the fault identification rates of the method proposed in this paper are improved by 10.71% and 14.28%, respectively.
In view of the weak features of early fault of rolling bearings, an early fault diagnosis method of rolling bearings is proposed, which combines adaptive noise complete set empirical mode decomposition (CEEMDAN) with multiscale permutation entropy (MPE) to extract fault features, and uses support vector machine (SVM) to identify the fault state. The originalsignal is decomposed into several components by CEEMDAN, and the correlation coefficient between each component and the original signal is calculated. The components larger than the threshold of correlation coefficient are reconstructed. The MPE parameters are optimized by PSO algorithm. The MPE value of the reconstructed signal is calculated as the fault feature vector, and the fault state is identified by SVM. The method is applied to XJTU-SY rolling bearing accelerated life test data set, and compared with the results of identifying MPE values as feature vector SVM without optimization of MPE parameters and CEEMDAN decomposition and optimization of MPE parameters, the results show that the fault identification rates of the method proposed in this paper are improved by 10.71% and 14.28%, respectively.






2023, 42(11): 1919-1928.
doi: 10.13433/j.cnki.1003-8728.20220230
Abstract:
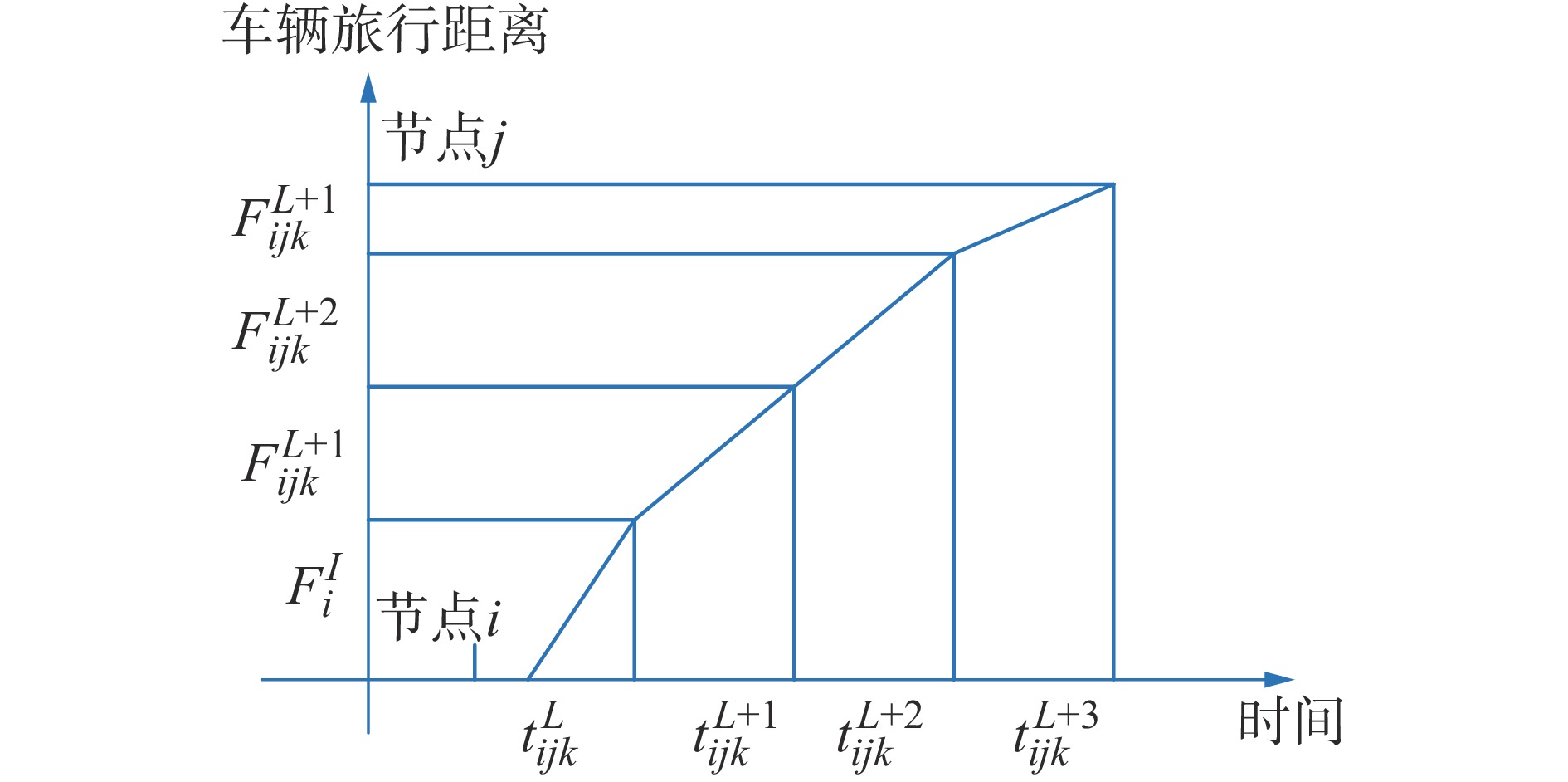
Aiming at the time-dependent feature and road network in vehicle routing problem, this paper studies time-dependent vehicle routing optimization under road network. First, considering the time-dependent travel speed, we construct the piecewise function on vehicle travel speed, and based on that, we could calculate dynamically the travel time by using cross time-domain method; Second, using the concept of key road nodes, we simplify the road network to overcome the curse of dimensionality of the vehicle routing optimization problem under road network. Based on the above two, we consider both time-dependent travel time and the simplified road network with key nodes, and establish an optimization model with the objective of minimizing the total travel time. Then, we design ant colony algorithm to solve the model. Finally, we test an example of barreled water delivery service in Weiyang District of Xi′an to verify the effectiveness of the model and algorithm. Additionally, the sensitivity on vehicle speed and departure time is analyzed.
Aiming at the time-dependent feature and road network in vehicle routing problem, this paper studies time-dependent vehicle routing optimization under road network. First, considering the time-dependent travel speed, we construct the piecewise function on vehicle travel speed, and based on that, we could calculate dynamically the travel time by using cross time-domain method; Second, using the concept of key road nodes, we simplify the road network to overcome the curse of dimensionality of the vehicle routing optimization problem under road network. Based on the above two, we consider both time-dependent travel time and the simplified road network with key nodes, and establish an optimization model with the objective of minimizing the total travel time. Then, we design ant colony algorithm to solve the model. Finally, we test an example of barreled water delivery service in Weiyang District of Xi′an to verify the effectiveness of the model and algorithm. Additionally, the sensitivity on vehicle speed and departure time is analyzed.



















2023, 42(11): 1929-1936.
doi: 10.13433/j.cnki.1003-8728.20220168
Abstract:
To improve the poor path quality such as unstructured mine, long and narrow ground structure and traditional BRRT algorithm, a path planning method for a mine rescue robot based on the B-spline APF-BRRT algorithm is proposed. Firstly, according to the target points generated with the BRRT algorithm and the information on obstacles in the mine environment, the APF target gravity is used to construct the artificial potential field. Then the Douglas-Peuker algorithm is used for line segment processing to extract key nodes. Finally, the B-spline function is used to obtain the smooth fitting path, which reduces the number of turning points and the length of path obtained with the APF-BRRT algorithm. The experimental results on the B-spline -APF-BRRT algorithm show that the path's number of turning points and its length obtained with the improved algorithm are obviously better than those obtained with the BRRT algorithm. Compared with the BRRT algorithm, the path generated with the B-spline -APF-BRRT algorithm is smoother in a narrow mine tunnel, the number of turning points is reduced to 9, and the path length is reduced by 7.73%.
To improve the poor path quality such as unstructured mine, long and narrow ground structure and traditional BRRT algorithm, a path planning method for a mine rescue robot based on the B-spline APF-BRRT algorithm is proposed. Firstly, according to the target points generated with the BRRT algorithm and the information on obstacles in the mine environment, the APF target gravity is used to construct the artificial potential field. Then the Douglas-Peuker algorithm is used for line segment processing to extract key nodes. Finally, the B-spline function is used to obtain the smooth fitting path, which reduces the number of turning points and the length of path obtained with the APF-BRRT algorithm. The experimental results on the B-spline -APF-BRRT algorithm show that the path's number of turning points and its length obtained with the improved algorithm are obviously better than those obtained with the BRRT algorithm. Compared with the BRRT algorithm, the path generated with the B-spline -APF-BRRT algorithm is smoother in a narrow mine tunnel, the number of turning points is reduced to 9, and the path length is reduced by 7.73%.










2023, 42(11): 1937-1945.
doi: 10.13433/j.cnki.1003-8728.20220171
Abstract:
To study the changes in the bearing capacity of the corroded pipe string before and after reinforcement, the acoustic emission instrument was used to collect the acoustic emission parameters of the tubular column members with corrosion defects and carbon fiber-reinforced polymer(CFRP) reinforcement during the quasi-static compression process. By comparing the number of hits, amplitude, root of mean square(RMS), counts rate, and cumulative energy count of acoustic emission parameters, the bearing capacity of the components was studied. The result shows that the acoustic emission characteristic parameters can better reflect the elastic phase, yielding phase, strengthened phase, necking, and fracture process of component materials. Amplitude and RMS can reflect the internal damage and destruction process of the specimen during the test. The changing trend of acoustic emission counts and acoustic emission accumulated energy can reflect the compression process of tubular columns. The deformation of the tubular columns with CFRP-reinforced is small, the bearing capacity is improved, the acoustic emission count is reduced, and the acoustic emission accumulated energy is increased.
To study the changes in the bearing capacity of the corroded pipe string before and after reinforcement, the acoustic emission instrument was used to collect the acoustic emission parameters of the tubular column members with corrosion defects and carbon fiber-reinforced polymer(CFRP) reinforcement during the quasi-static compression process. By comparing the number of hits, amplitude, root of mean square(RMS), counts rate, and cumulative energy count of acoustic emission parameters, the bearing capacity of the components was studied. The result shows that the acoustic emission characteristic parameters can better reflect the elastic phase, yielding phase, strengthened phase, necking, and fracture process of component materials. Amplitude and RMS can reflect the internal damage and destruction process of the specimen during the test. The changing trend of acoustic emission counts and acoustic emission accumulated energy can reflect the compression process of tubular columns. The deformation of the tubular columns with CFRP-reinforced is small, the bearing capacity is improved, the acoustic emission count is reduced, and the acoustic emission accumulated energy is increased.










Study on Amplitude and Phase Control Strategy of Vibration System of Linear Friction Welding Machine
2023, 42(11): 1946-1951.
doi: 10.13433/j.cnki.1003-8728.20220267
Abstract:
In order to ensure the energy supply stability of welding operation and improve the control accuracy of amplitude and phase of vibration servo system of linear friction welding machine, the relationship between target signal, input signal and output signal was established in this paper. The vibration servo system controller was designed based on amplitude and phase control algorithm, and the system control model was established in Simulink. Through simulation, the algorithm input parameters under different welding parameters were obtained. The feasibility of amplitude and phase control strategy was verified by welding tests under typical parameters. The control effects of different control methods were analyzed according to the welding process parameters. The results showed that the amplitude control error with amplitude and phase control algorithm was 1.2% and the phase control error was 0.16°.
In order to ensure the energy supply stability of welding operation and improve the control accuracy of amplitude and phase of vibration servo system of linear friction welding machine, the relationship between target signal, input signal and output signal was established in this paper. The vibration servo system controller was designed based on amplitude and phase control algorithm, and the system control model was established in Simulink. Through simulation, the algorithm input parameters under different welding parameters were obtained. The feasibility of amplitude and phase control strategy was verified by welding tests under typical parameters. The control effects of different control methods were analyzed according to the welding process parameters. The results showed that the amplitude control error with amplitude and phase control algorithm was 1.2% and the phase control error was 0.16°.












2023, 42(11): 1952-1958.
doi: 10.13433/j.cnki.1003-8728.20230326
Abstract:
The scanning path of 3D printing is an important factor affecting printing quality and efficiency. On the basis of studying the printing principle and finite element simulation of Fused Deposition Modeling (FDM), this paper aims to give a method of interlayer coherent layered composite scanning path. Firstly, the process characteristics of reciprocating linear scanning and offset scanning were analyzed, and a layered composite scanning path with interlayer coherence was proposed; Then, a finite element model of the FDM forming process was established using the life and death element technology and experimentally verified. Combining finite element simulation and experiments, the results show that the scanning path proposed in this paper not only integrates the advantages of reciprocating linear scanning and offset scanning, but also enhances the coherence and integrity of printing through the extrusion method of interlayer coherence and layered composite.
The scanning path of 3D printing is an important factor affecting printing quality and efficiency. On the basis of studying the printing principle and finite element simulation of Fused Deposition Modeling (FDM), this paper aims to give a method of interlayer coherent layered composite scanning path. Firstly, the process characteristics of reciprocating linear scanning and offset scanning were analyzed, and a layered composite scanning path with interlayer coherence was proposed; Then, a finite element model of the FDM forming process was established using the life and death element technology and experimentally verified. Combining finite element simulation and experiments, the results show that the scanning path proposed in this paper not only integrates the advantages of reciprocating linear scanning and offset scanning, but also enhances the coherence and integrity of printing through the extrusion method of interlayer coherence and layered composite.














