作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
当期目录
显示方式:
2024,
43(7):
1101-1119. doi: 10.13433/j.cnki.1003-8728.20240079
 摘要
摘要 HTML
HTML PDF 8654KB
PDF 8654KB
摘要:
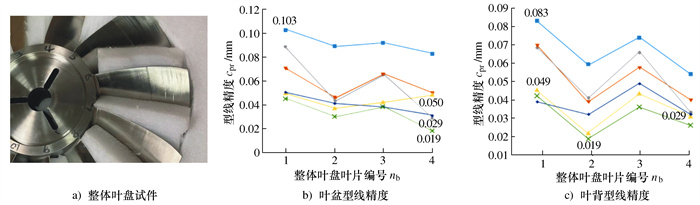
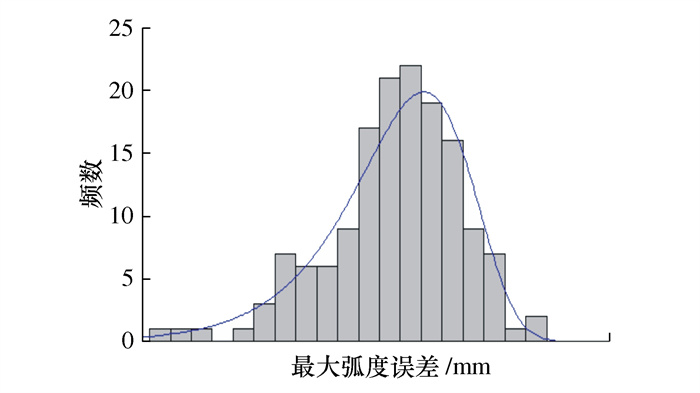
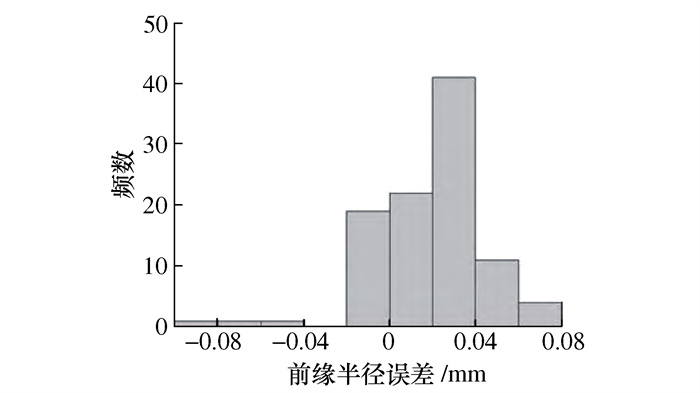
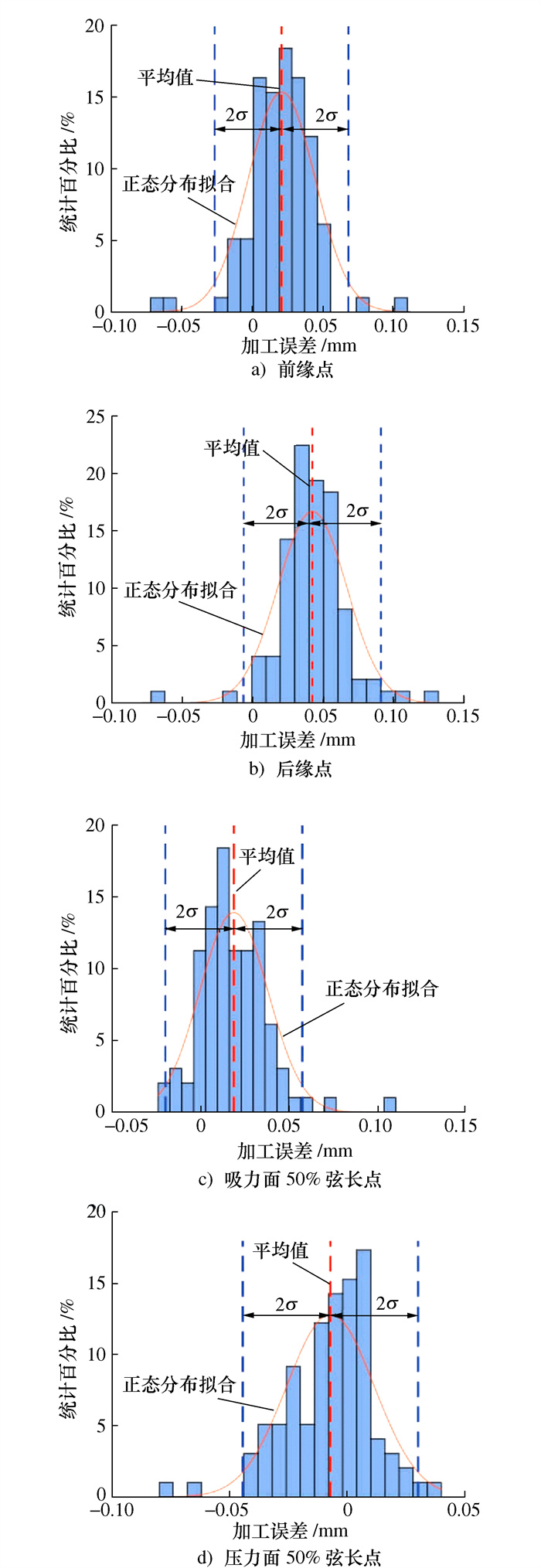
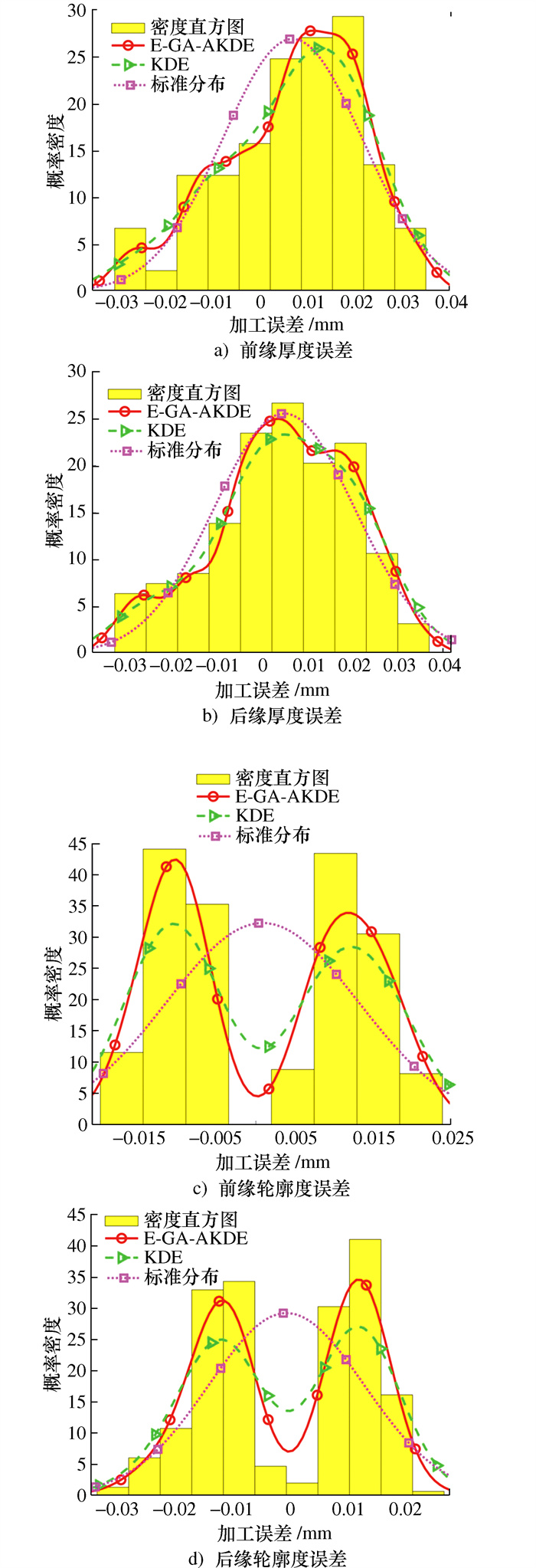
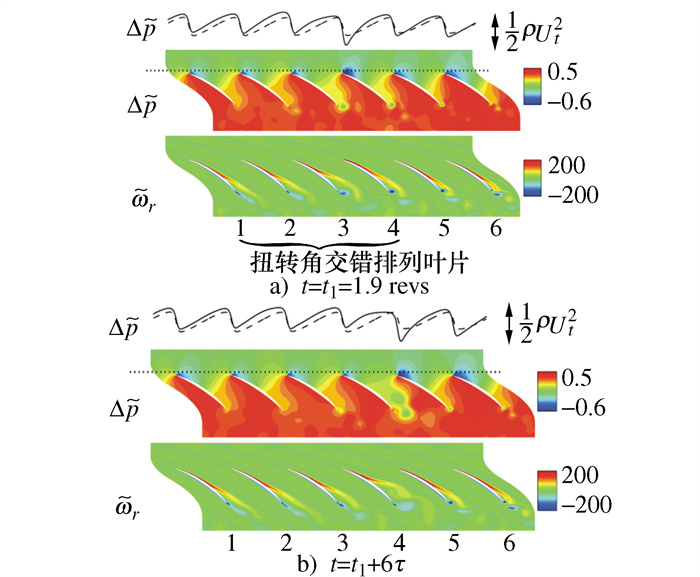
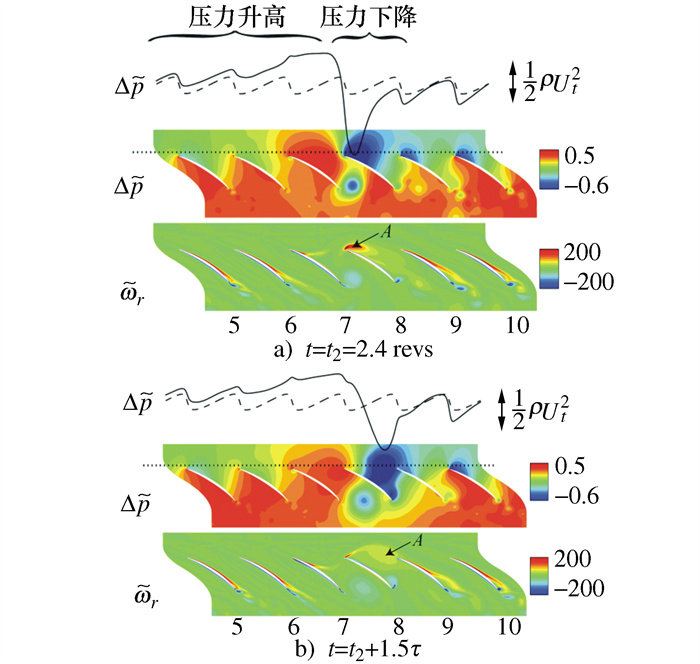
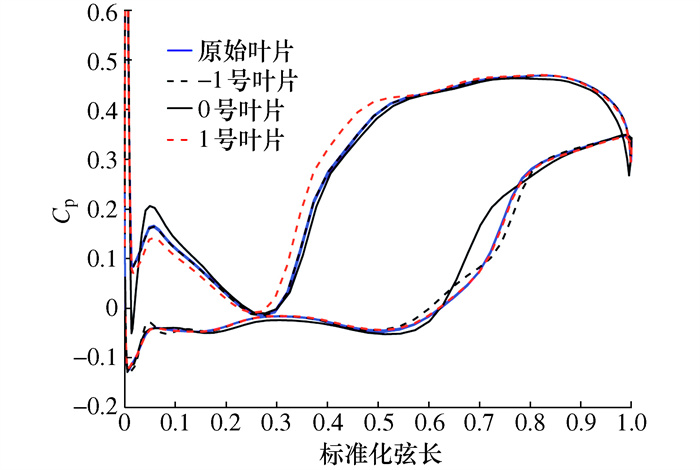
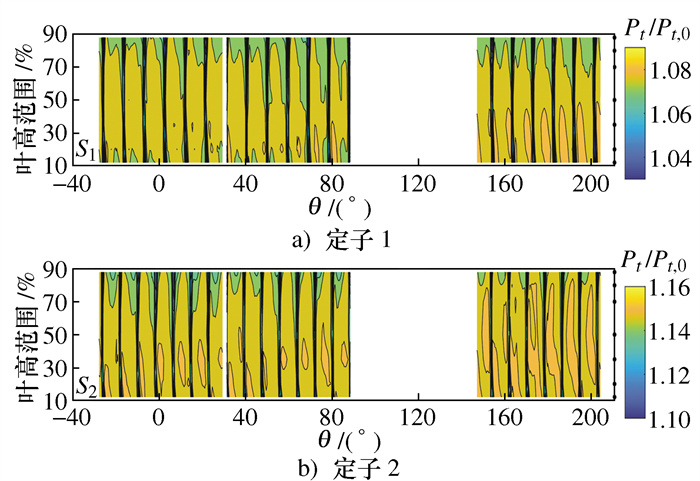
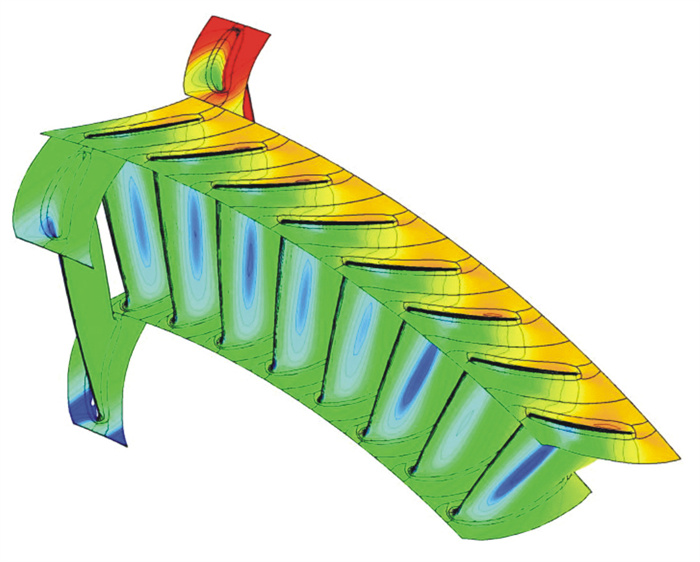
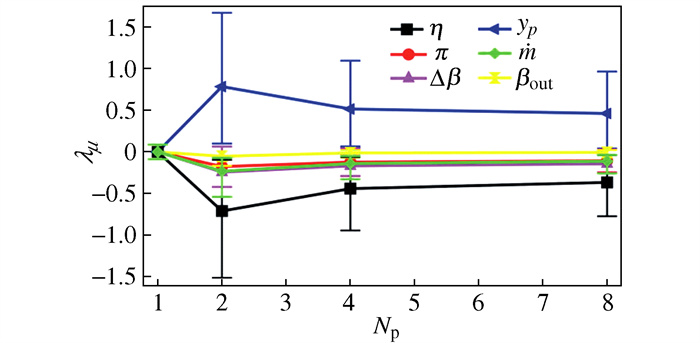
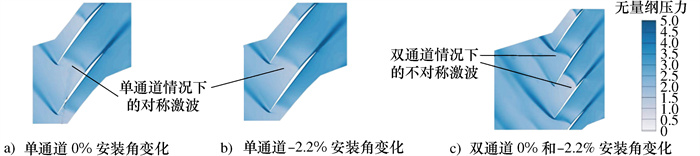
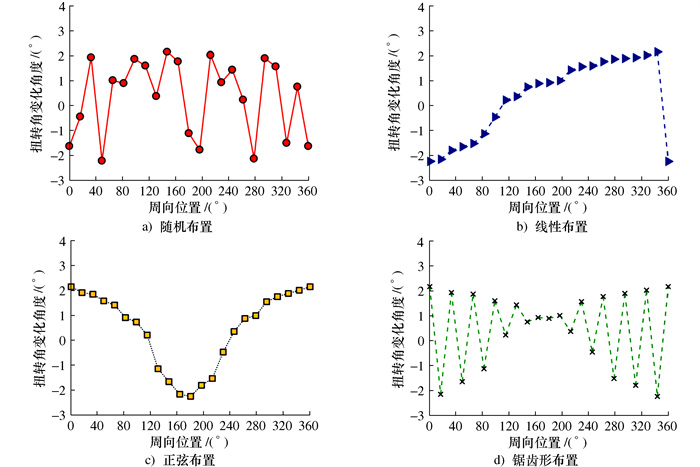
航空发动机压气机整体叶盘通常设计为旋转周期对称结构。然而, 实际加工中同一级整体叶盘上不同叶片之间以及单个叶片自身存在的加工误差离散性会对流场参数产生不利影响。因此, 提高整体叶盘叶片加工误差一致性成为普遍关注的难题。综述了近年来针对同级叶盘不同叶片加工误差离散性对气动性能影响规律的相关研究, 以及加工过程强时变特性下误差离散度控制的相关成果。就误差离散性现象及产生原因、对性能影响规律及加工误差离散度控制方法这3个方面展开论述。最后展望了未来误差离散度加工控制方法发展趋势, 为未来相关研究工作提供参考。
航空发动机压气机整体叶盘通常设计为旋转周期对称结构。然而, 实际加工中同一级整体叶盘上不同叶片之间以及单个叶片自身存在的加工误差离散性会对流场参数产生不利影响。因此, 提高整体叶盘叶片加工误差一致性成为普遍关注的难题。综述了近年来针对同级叶盘不同叶片加工误差离散性对气动性能影响规律的相关研究, 以及加工过程强时变特性下误差离散度控制的相关成果。就误差离散性现象及产生原因、对性能影响规律及加工误差离散度控制方法这3个方面展开论述。最后展望了未来误差离散度加工控制方法发展趋势, 为未来相关研究工作提供参考。
2024,
43(7):
1120-1131. doi: 10.13433/j.cnki.1003-8728.20240078
摘要:
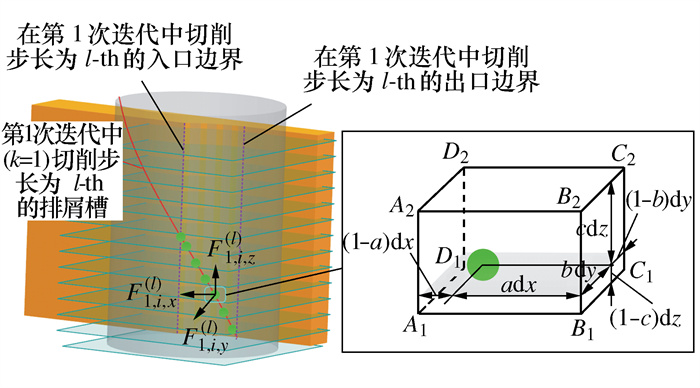
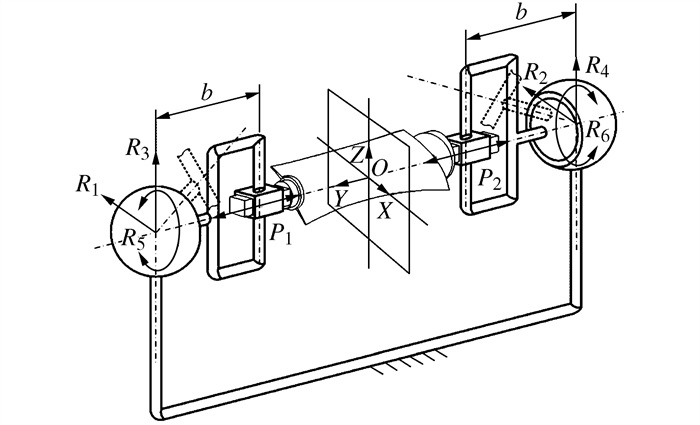
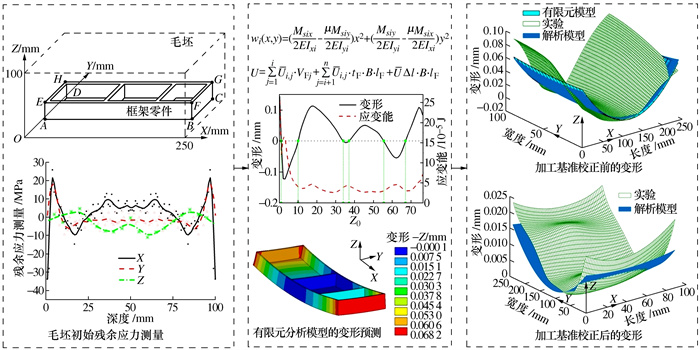
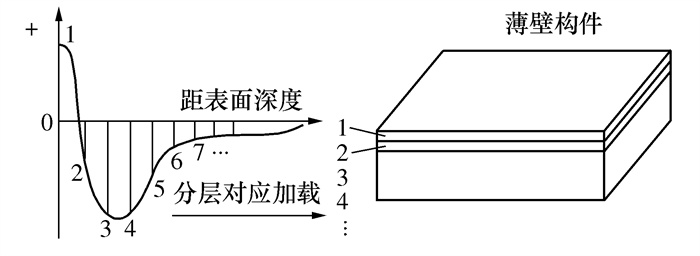
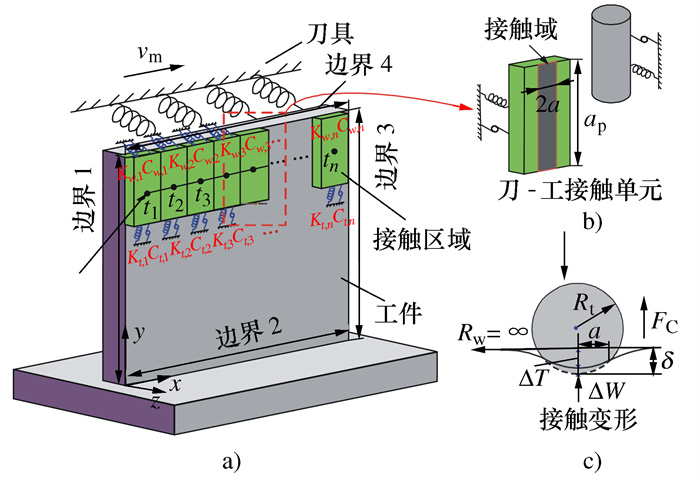
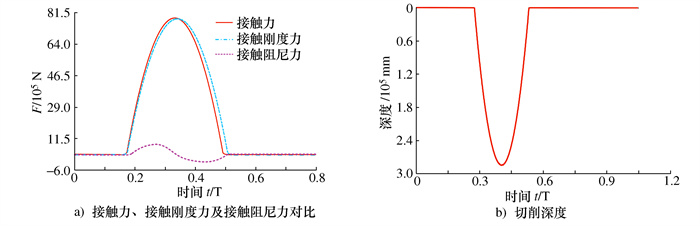
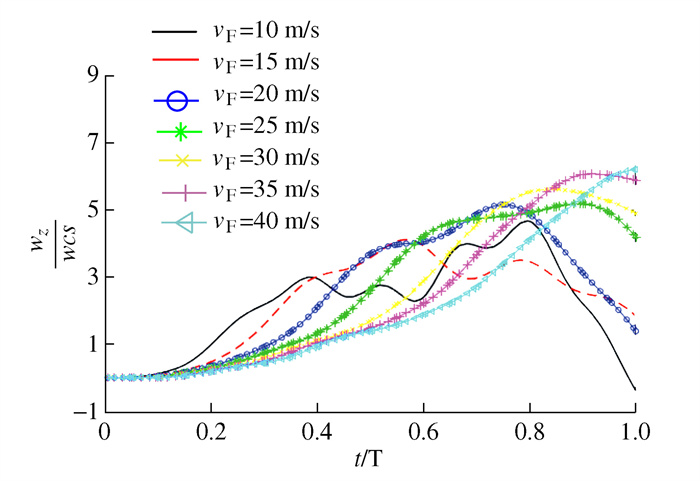
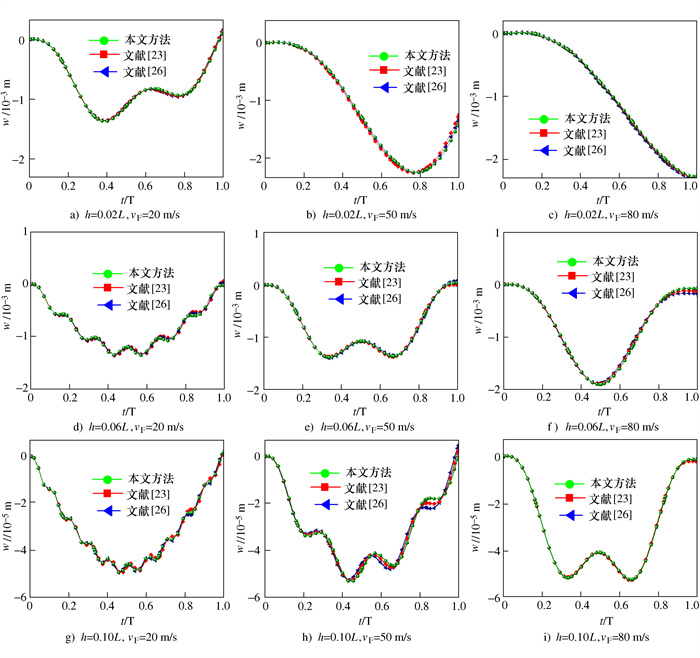
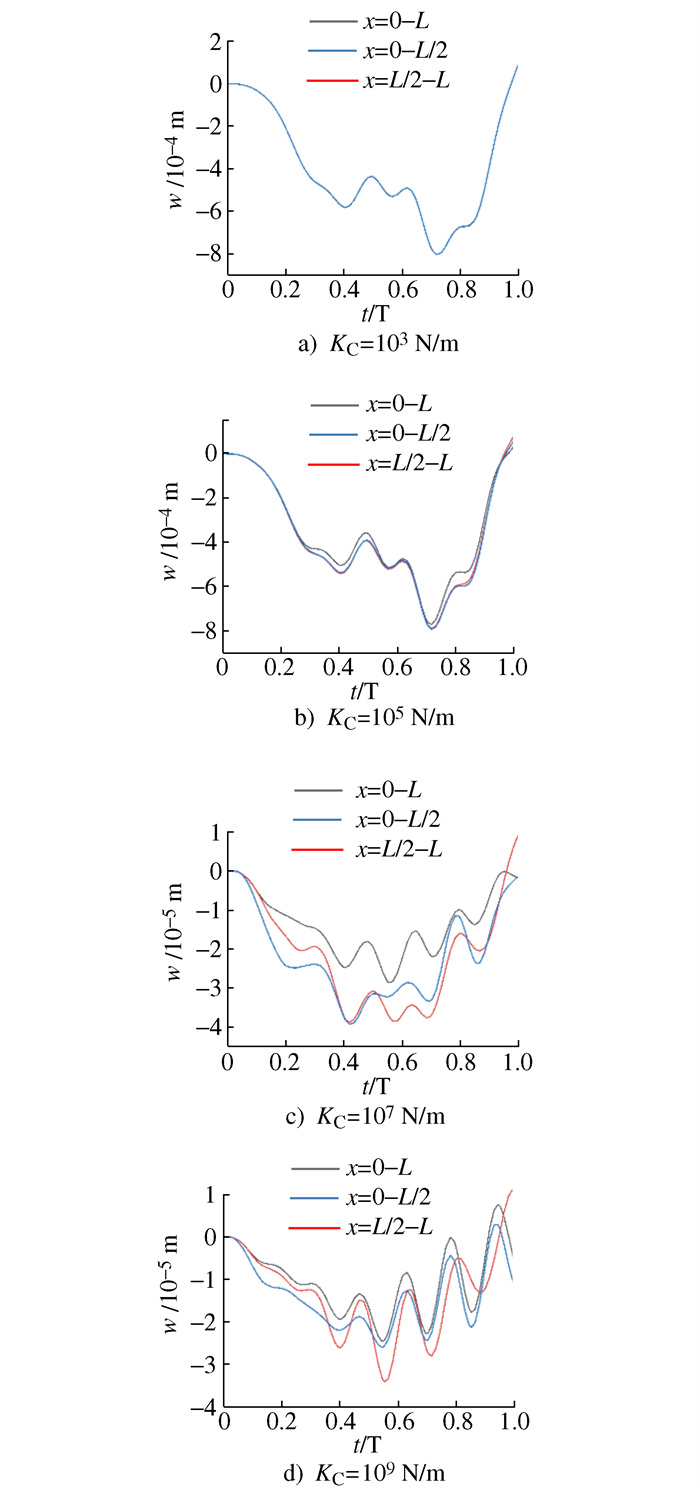
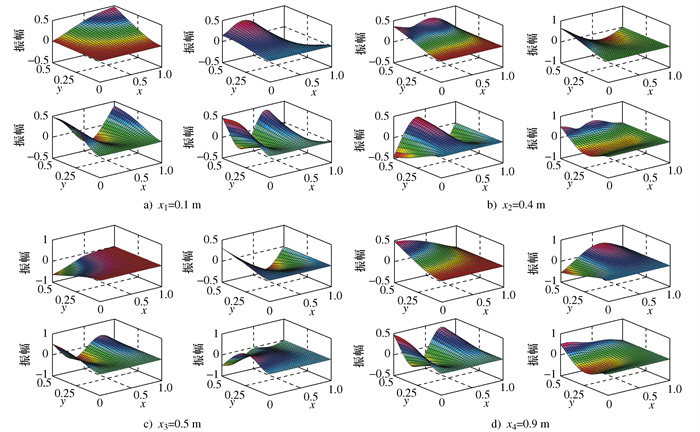
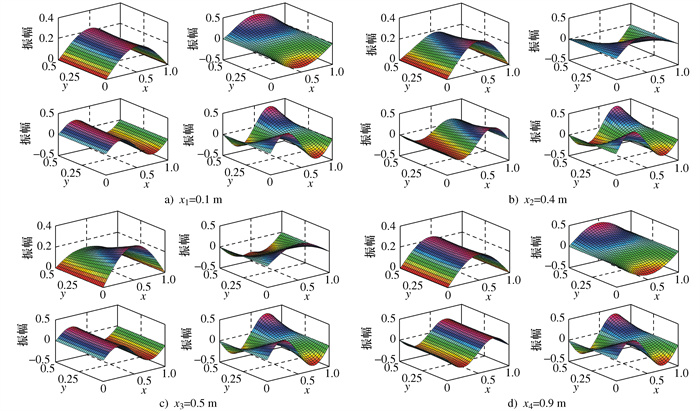
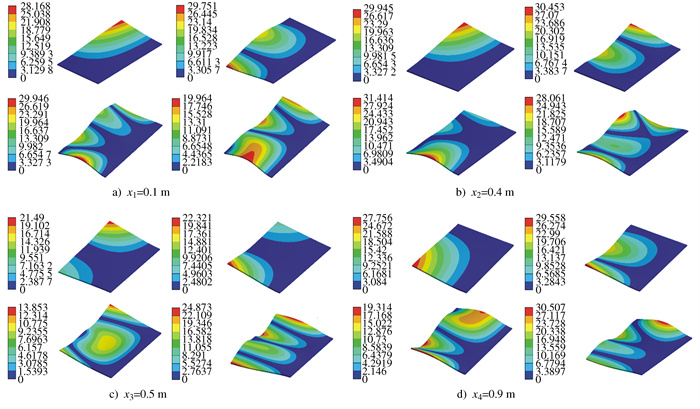
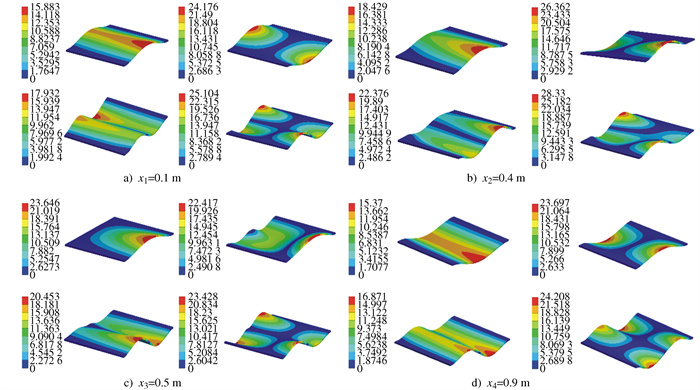
针对薄壁件铣削过程工件约束边界复杂及动特性难预测等问题, 创新性的提出了接触移动边界约束的概念, 深入研究了接触移动边界约束对系统动特性的影响规律。首先, 建立了考虑刀-工接触移动边界约束作用的薄板切削过程动力学模型, 提取刀-工接触区域, 分析了接触刚度力和阻尼力与接触参数的复杂影响关系。其次, 预测了任意接触移动边界约束作用的薄板动态响应, 形成了更为全面地任意边界约束选择方案, 包括接触移动边界条件和经典边界条件。基于薄板理论建立系统运动学方程, 综合考虑包括移动边界约束产生的能量项、常规任意边界约束产生的能量项以及薄板变形产生的能量项的组合。最后, 通过不同案例以及有限元法, 与现有文献中的数值、解析和实验等方法获得的结果作了大量对比, 证明了本文提出方法的准确性。结果表明, 接触移动约束效应对系统动态特性的影响不可忽视。
针对薄壁件铣削过程工件约束边界复杂及动特性难预测等问题, 创新性的提出了接触移动边界约束的概念, 深入研究了接触移动边界约束对系统动特性的影响规律。首先, 建立了考虑刀-工接触移动边界约束作用的薄板切削过程动力学模型, 提取刀-工接触区域, 分析了接触刚度力和阻尼力与接触参数的复杂影响关系。其次, 预测了任意接触移动边界约束作用的薄板动态响应, 形成了更为全面地任意边界约束选择方案, 包括接触移动边界条件和经典边界条件。基于薄板理论建立系统运动学方程, 综合考虑包括移动边界约束产生的能量项、常规任意边界约束产生的能量项以及薄板变形产生的能量项的组合。最后, 通过不同案例以及有限元法, 与现有文献中的数值、解析和实验等方法获得的结果作了大量对比, 证明了本文提出方法的准确性。结果表明, 接触移动约束效应对系统动态特性的影响不可忽视。
2024,
43(7):
1132-1141. doi: 10.13433/j.cnki.1003-8728.20240022
摘要:
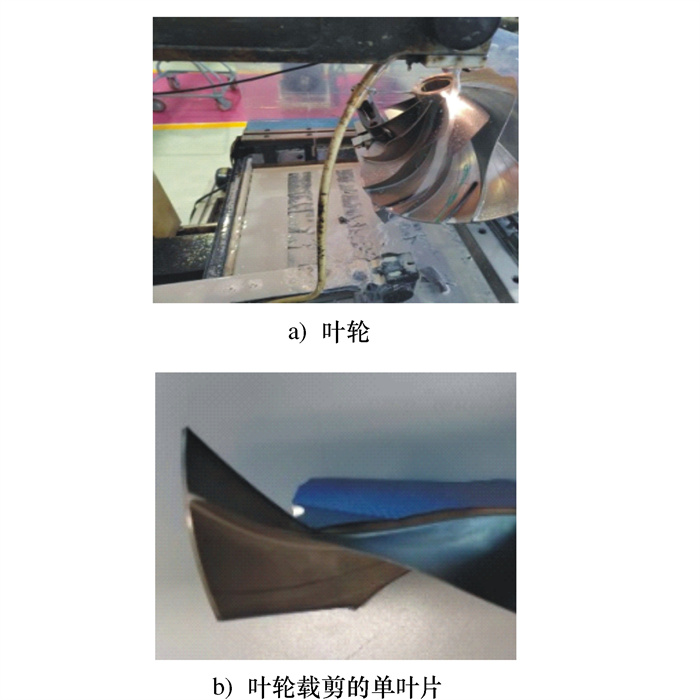
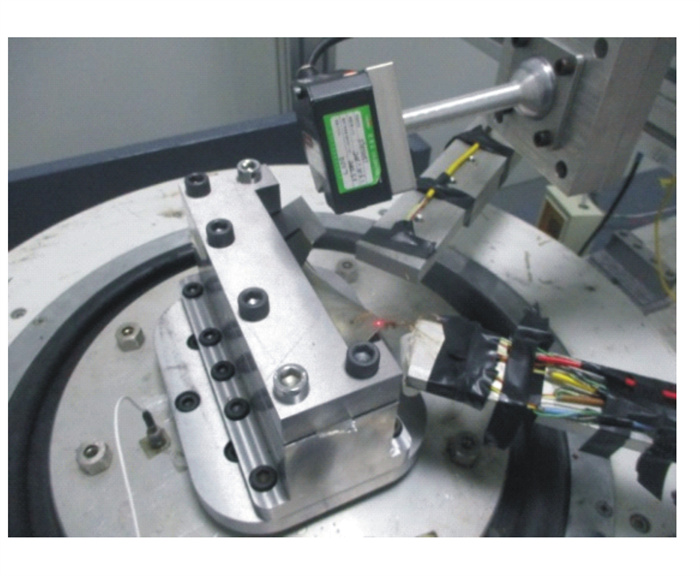
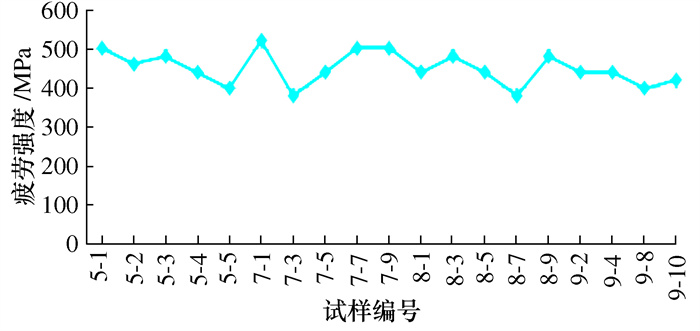
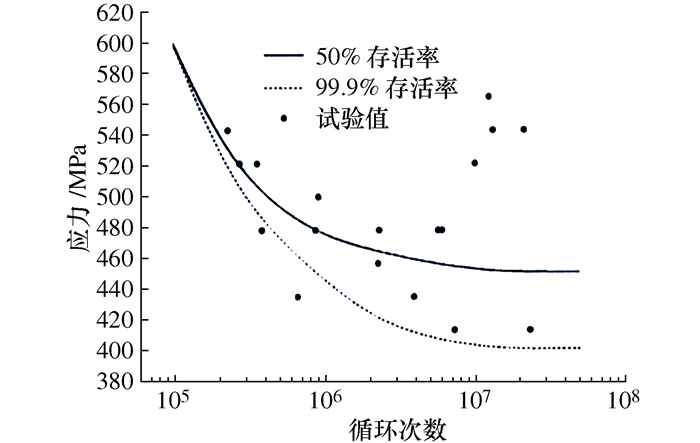
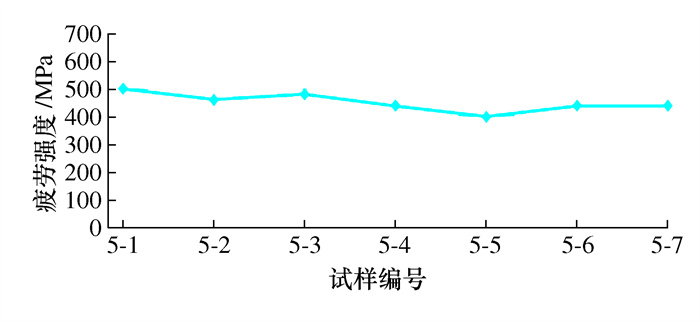
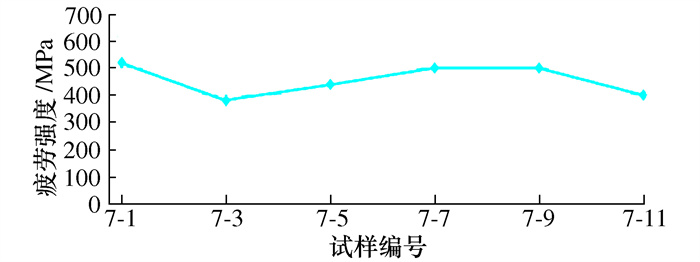
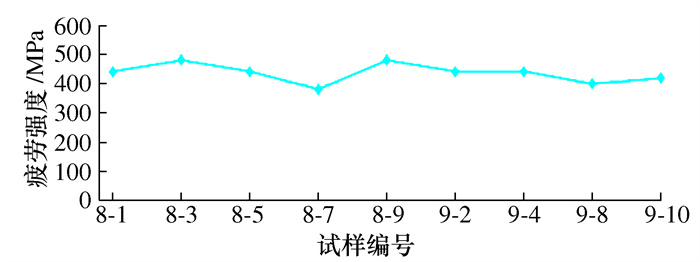
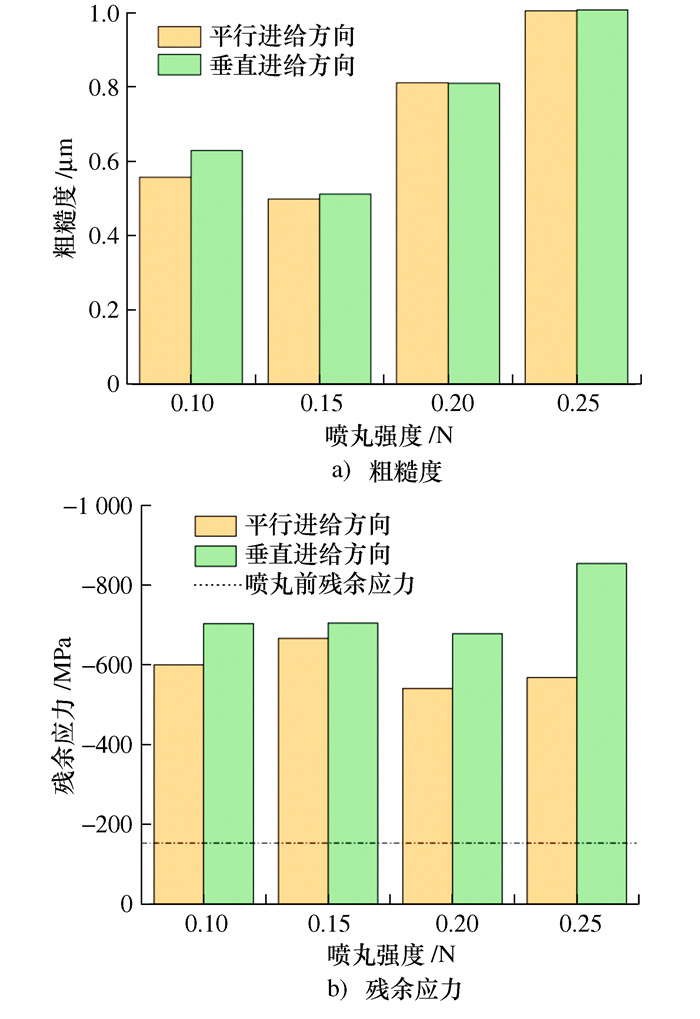
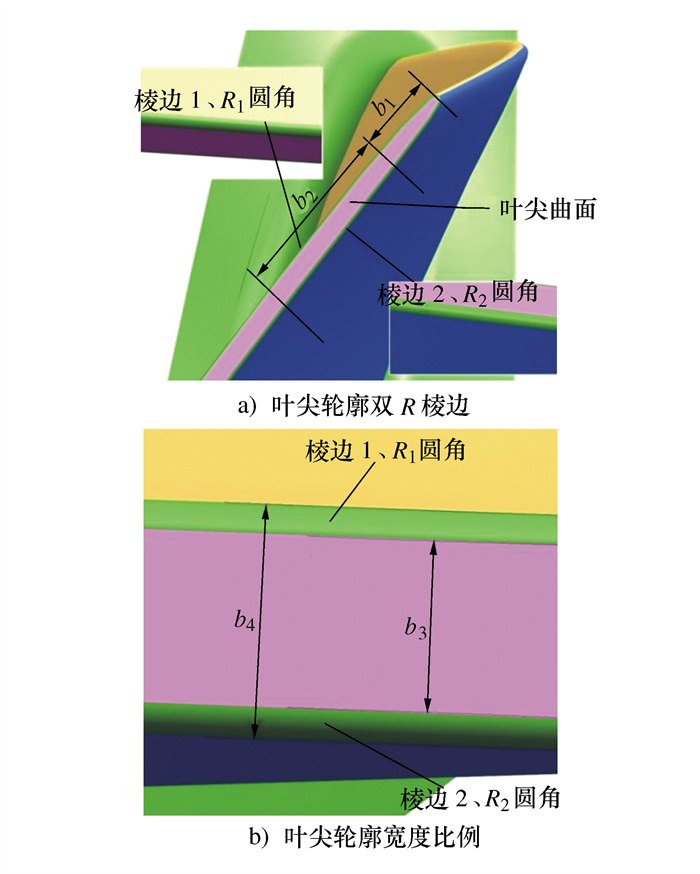
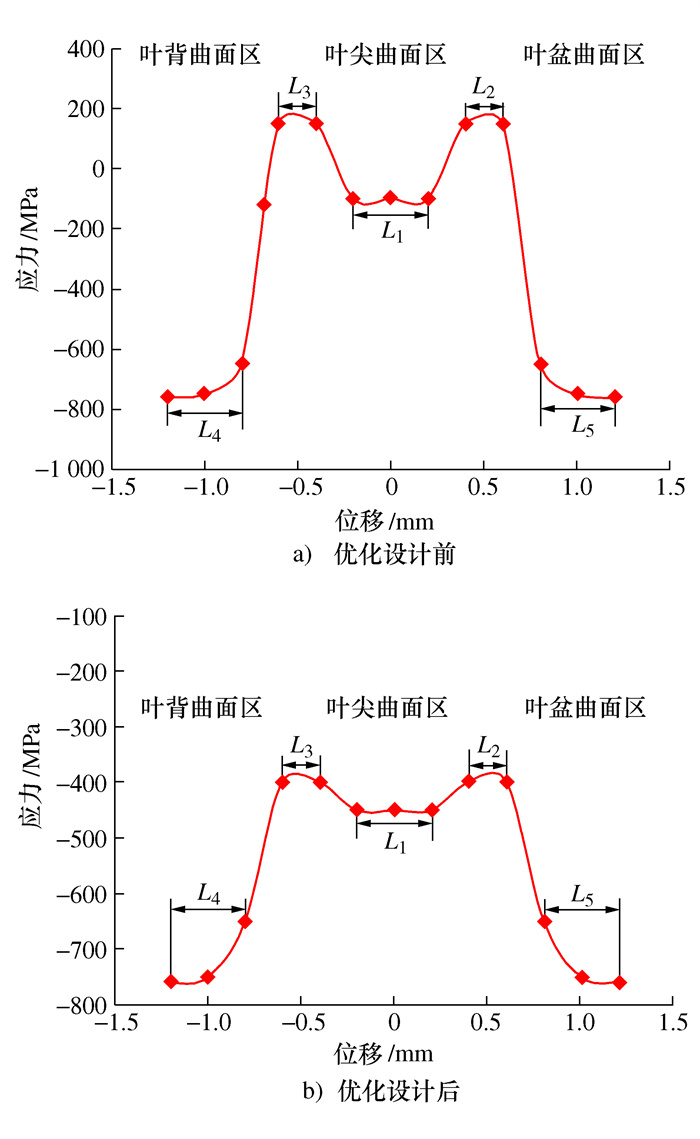
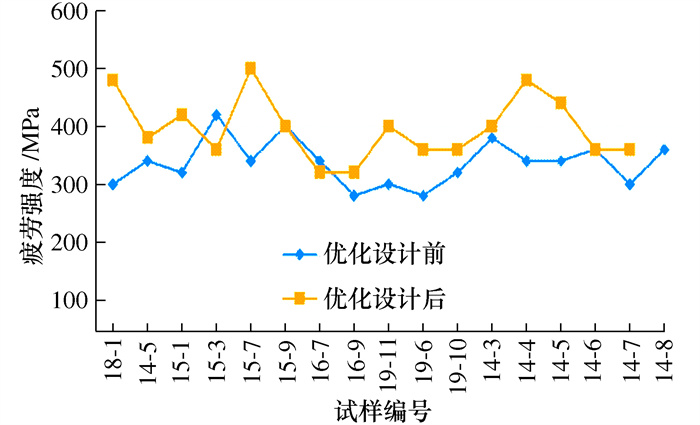
离心叶轮叶片的疲劳强度是叶轮叶片表面完整性各特征量的综合作用结果, 不同工艺参数的叶片表面完整性状态也不相同, 带来不同的疲劳特性。本文重点研究精密切削和喷丸强化对钛合金(TC11)离心叶轮叶片疲劳特性的影响规律, 根据不同工艺状态下叶轮叶片疲劳强度试验反馈数据, 开展基于离心叶轮结构特征的形性优化设计, 并通过振动疲劳试验, 采集循环次数3×107的叶轮叶片疲劳强度值, 试验结果表明优化设计后的叶轮叶片疲劳强度提升15%, 对新研型号的离心叶轮加工参数优化和结构设计优化具有重要指导意义。
离心叶轮叶片的疲劳强度是叶轮叶片表面完整性各特征量的综合作用结果, 不同工艺参数的叶片表面完整性状态也不相同, 带来不同的疲劳特性。本文重点研究精密切削和喷丸强化对钛合金(TC11)离心叶轮叶片疲劳特性的影响规律, 根据不同工艺状态下叶轮叶片疲劳强度试验反馈数据, 开展基于离心叶轮结构特征的形性优化设计, 并通过振动疲劳试验, 采集循环次数3×107的叶轮叶片疲劳强度值, 试验结果表明优化设计后的叶轮叶片疲劳强度提升15%, 对新研型号的离心叶轮加工参数优化和结构设计优化具有重要指导意义。
2024,
43(7):
1142-1150. doi: 10.13433/j.cnki.1003-8728.20240071
摘要:
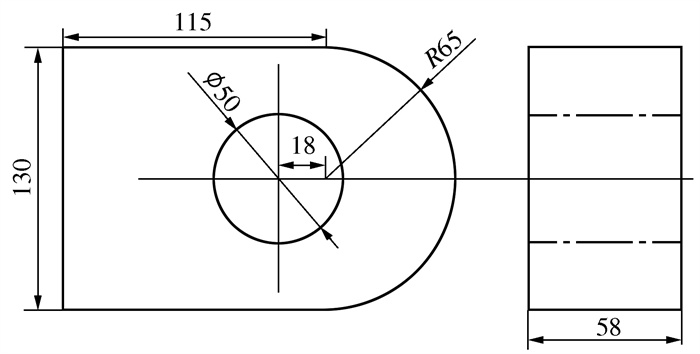
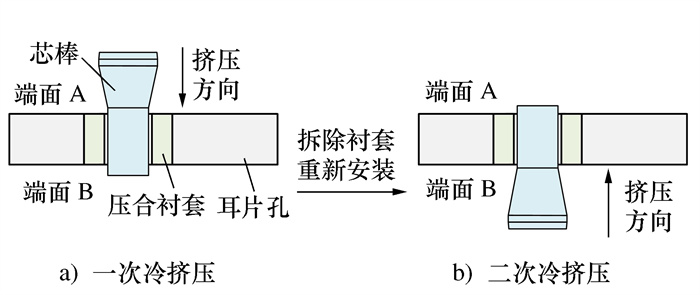
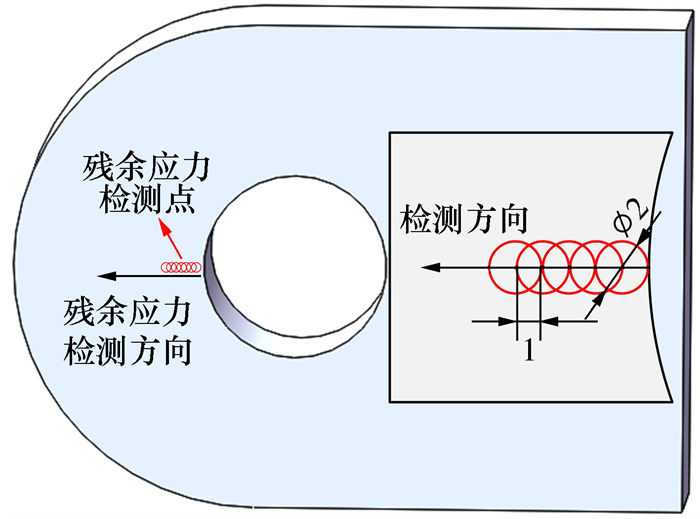
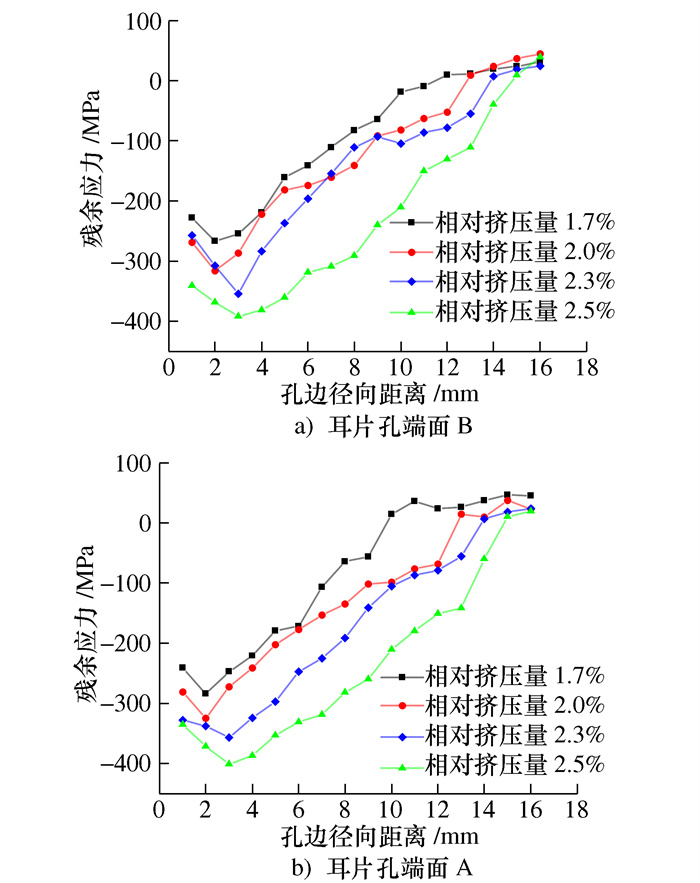
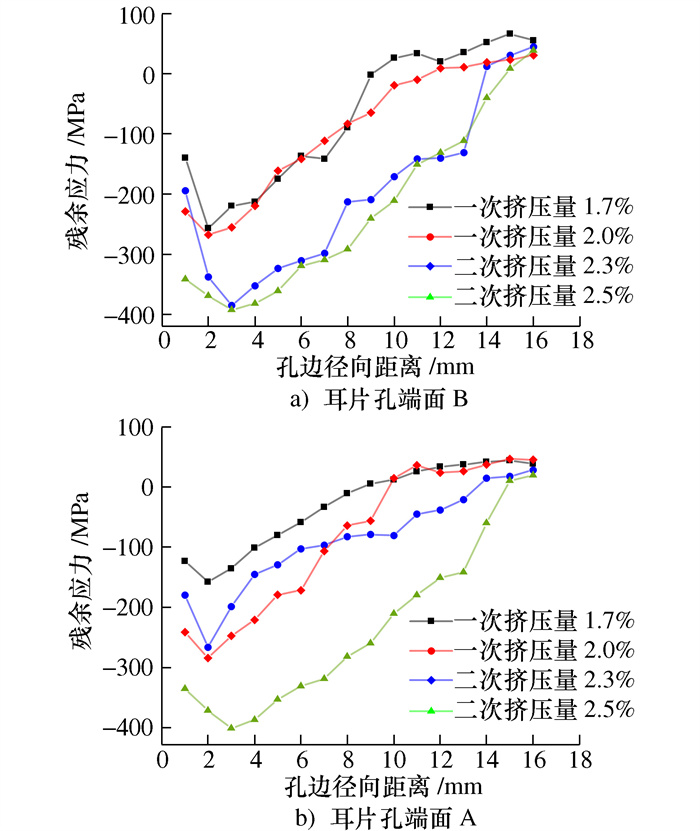
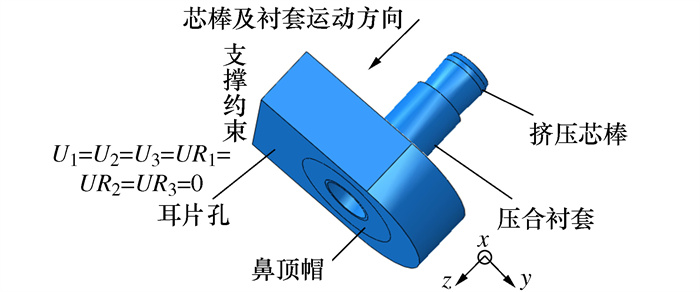
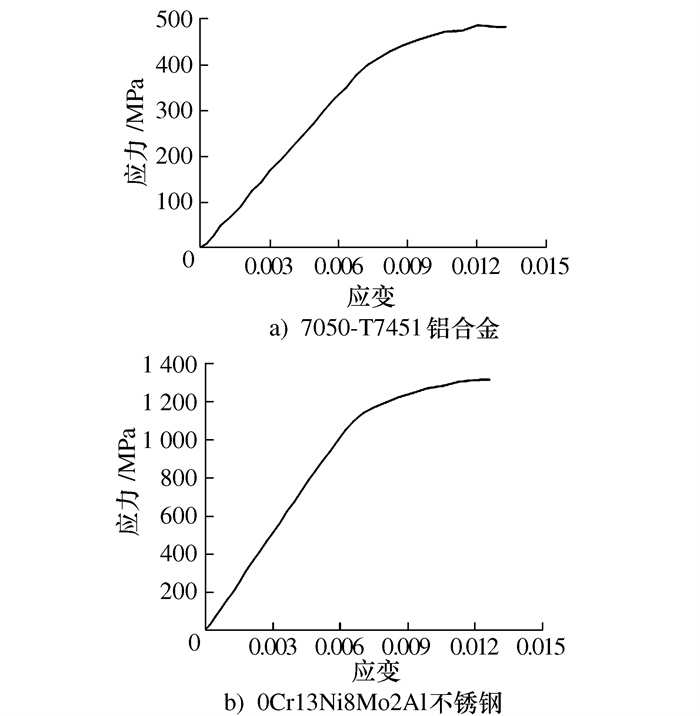
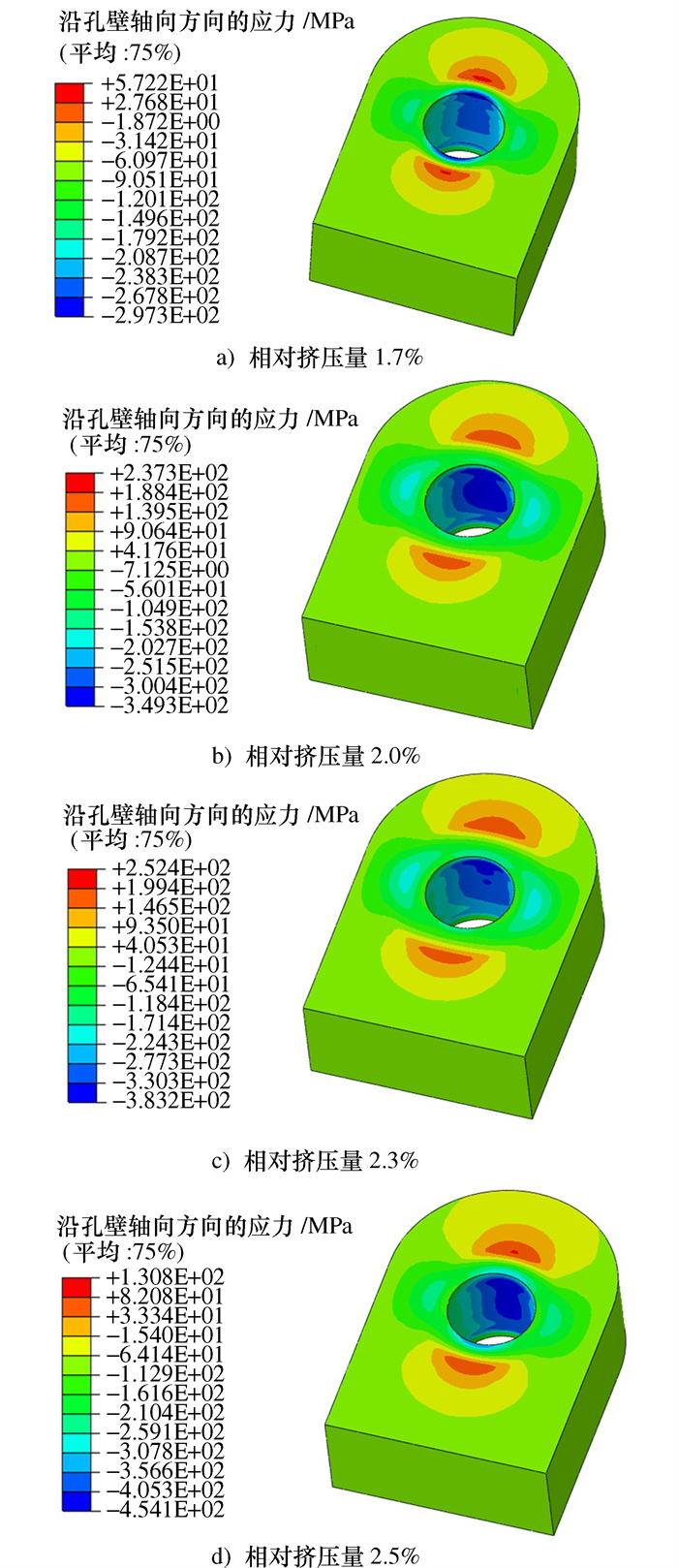
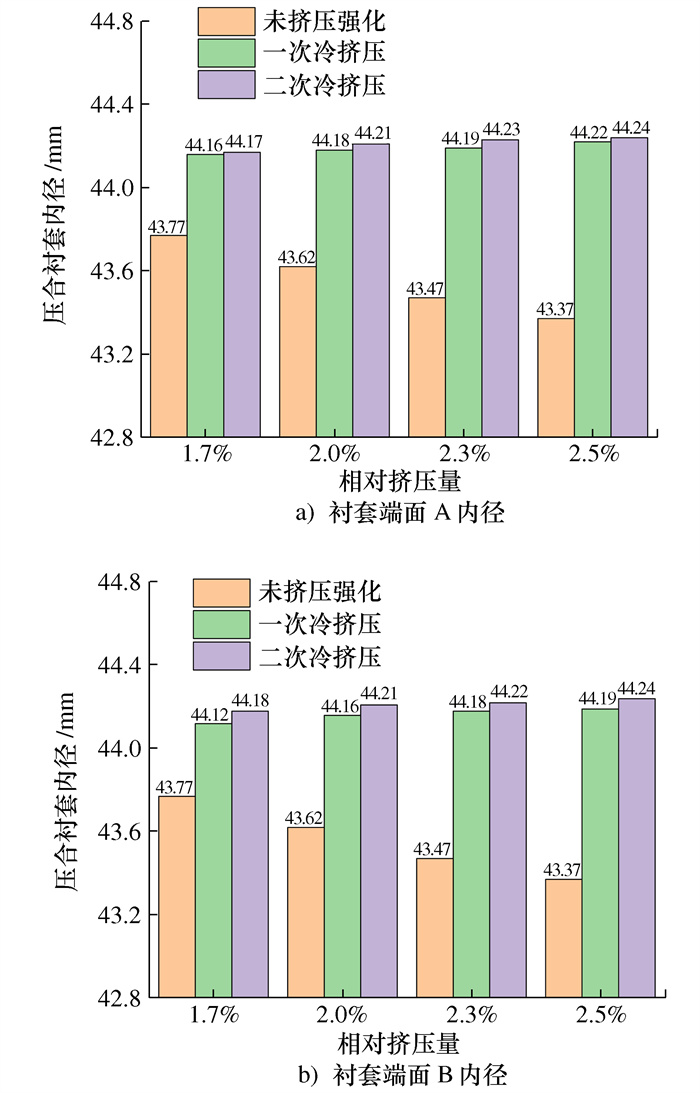
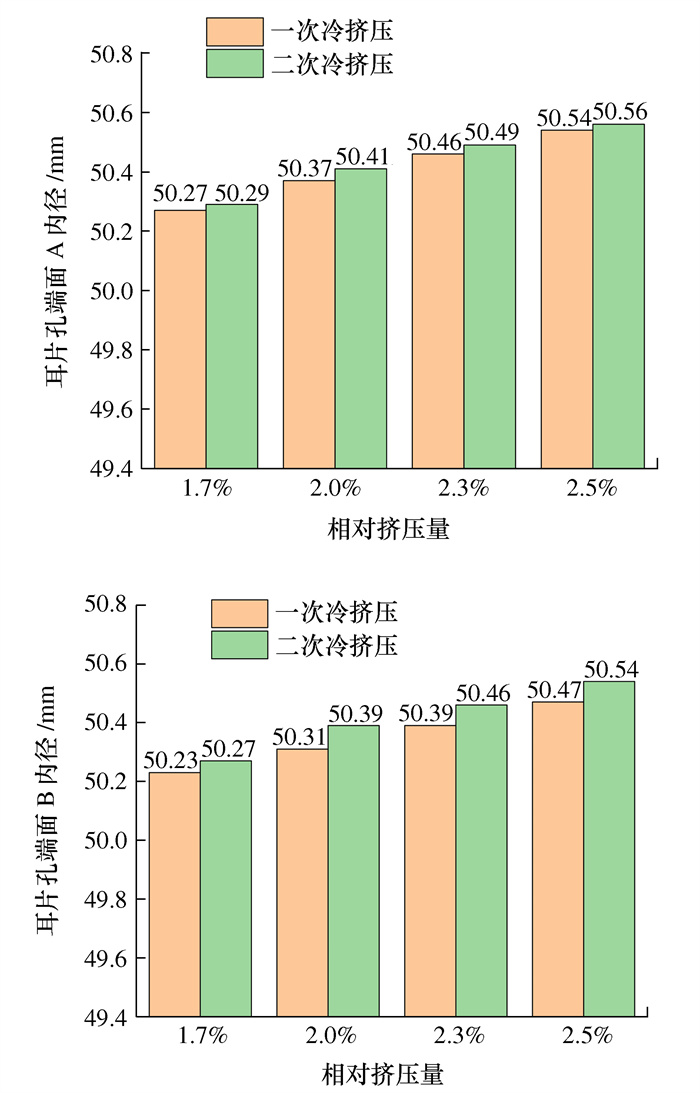
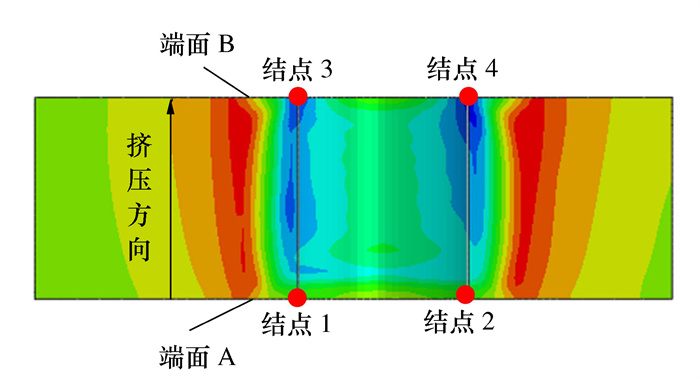
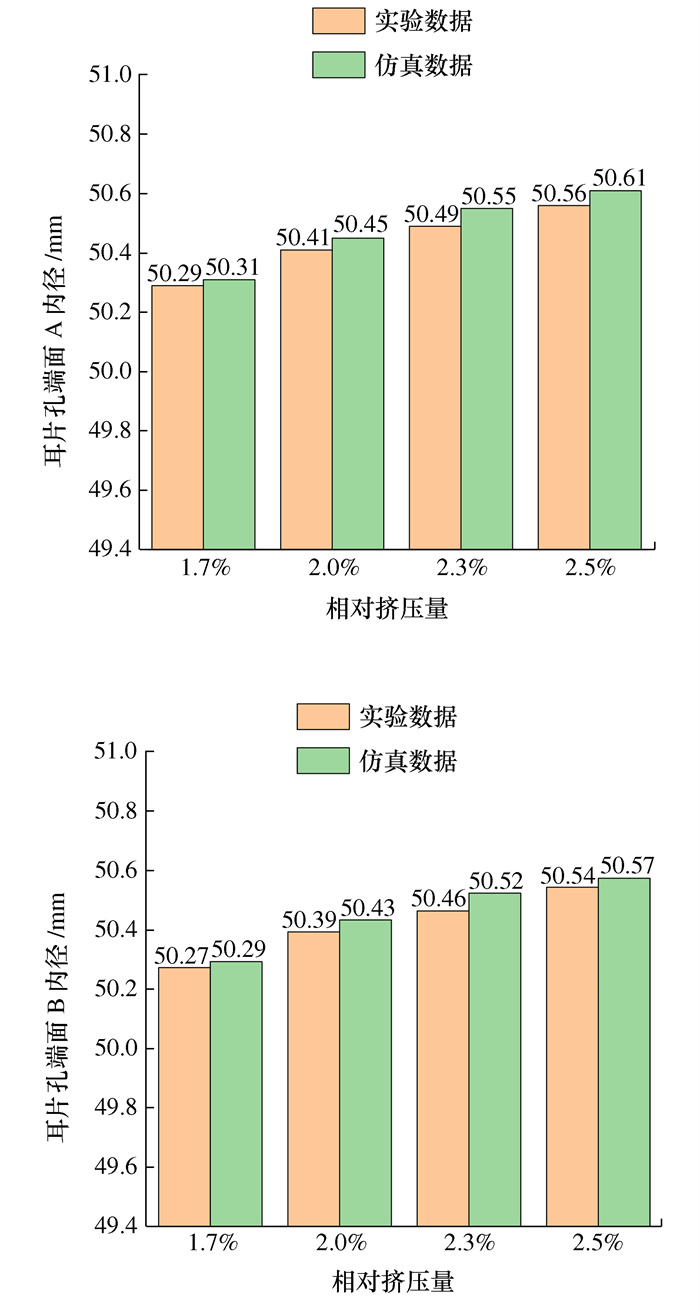
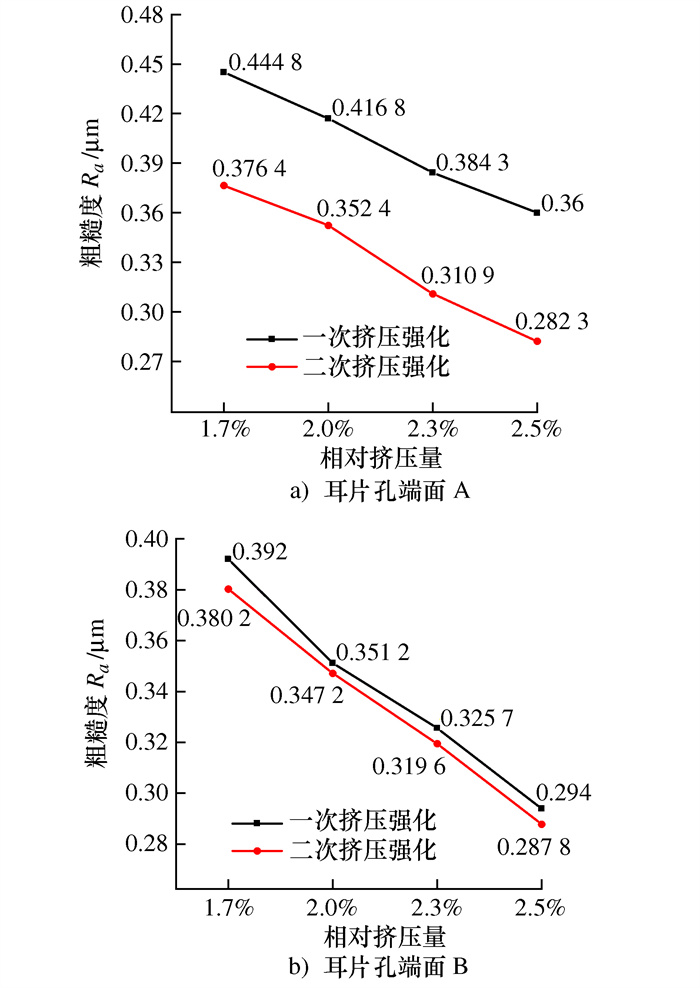
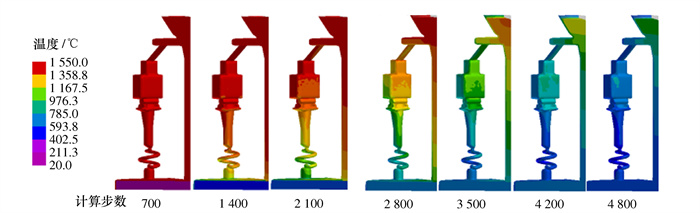
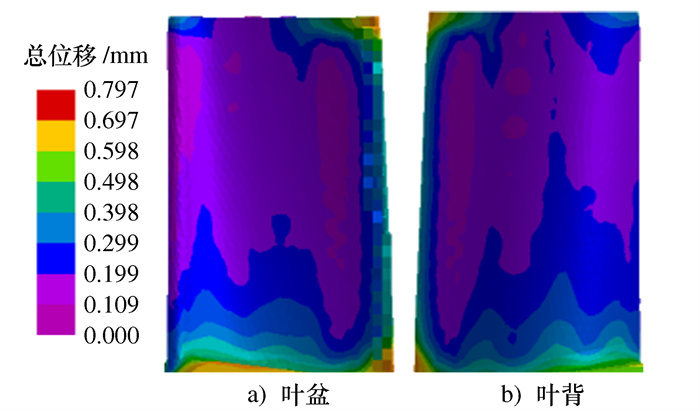
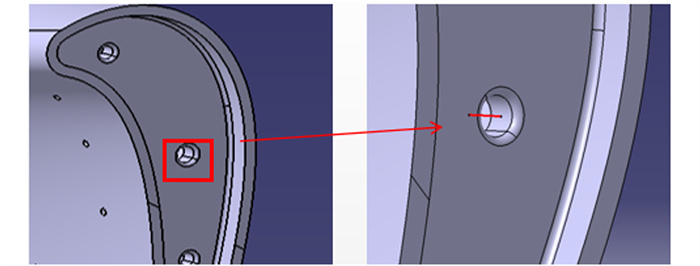
采用压合衬套二次冷挤压工艺对7050铝合金耳片孔进行挤压强化; 通过X射线衍射仪、三坐标测量机和粗糙度仪, 研究二次冷挤压对耳片孔内表面的残余应力、塑性变形以及粗糙度的影响, 并通过有限元仿真进行验证。实验结果表明: 相较于一次冷挤压, 压合衬套二次冷挤压可有效改善试样两端残余应力的不均匀性。随着二次冷挤压相对挤压量增大, 残余压应力峰值和应力层深度都进一步增大, 塑性变形程度也更大, 同时降低了孔壁表面粗糙度。在相对挤压量为2.5%时, 最大残余压应力可达-400.3 MPa, 并形成了约14 mm的残余压应力层; 试样端面A与端面B内径分别增大了0.56 mm和0.54 mm; 孔壁表面粗糙度降低幅度达到71.0%。相较于一次冷挤压, 二次冷挤压强化后孔壁沿径向形成了更深的残余压应力层和塑性变形层, 显著提高了耳片孔的整体服役性能。
采用压合衬套二次冷挤压工艺对7050铝合金耳片孔进行挤压强化; 通过X射线衍射仪、三坐标测量机和粗糙度仪, 研究二次冷挤压对耳片孔内表面的残余应力、塑性变形以及粗糙度的影响, 并通过有限元仿真进行验证。实验结果表明: 相较于一次冷挤压, 压合衬套二次冷挤压可有效改善试样两端残余应力的不均匀性。随着二次冷挤压相对挤压量增大, 残余压应力峰值和应力层深度都进一步增大, 塑性变形程度也更大, 同时降低了孔壁表面粗糙度。在相对挤压量为2.5%时, 最大残余压应力可达-400.3 MPa, 并形成了约14 mm的残余压应力层; 试样端面A与端面B内径分别增大了0.56 mm和0.54 mm; 孔壁表面粗糙度降低幅度达到71.0%。相较于一次冷挤压, 二次冷挤压强化后孔壁沿径向形成了更深的残余压应力层和塑性变形层, 显著提高了耳片孔的整体服役性能。
2024,
43(7):
1151-1157. doi: 10.13433/j.cnki.1003-8728.20240023
摘要:
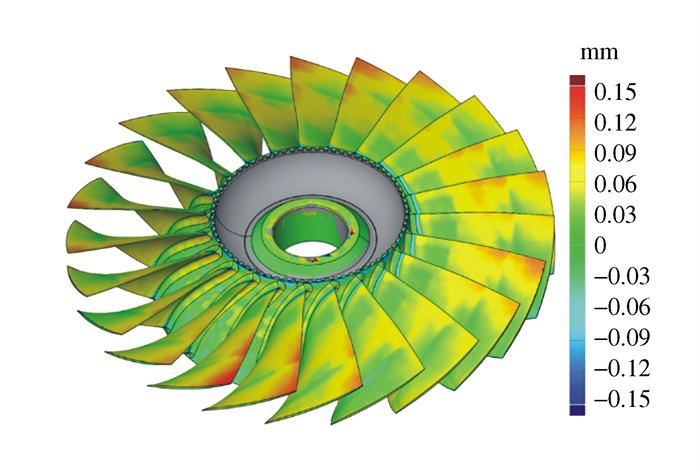
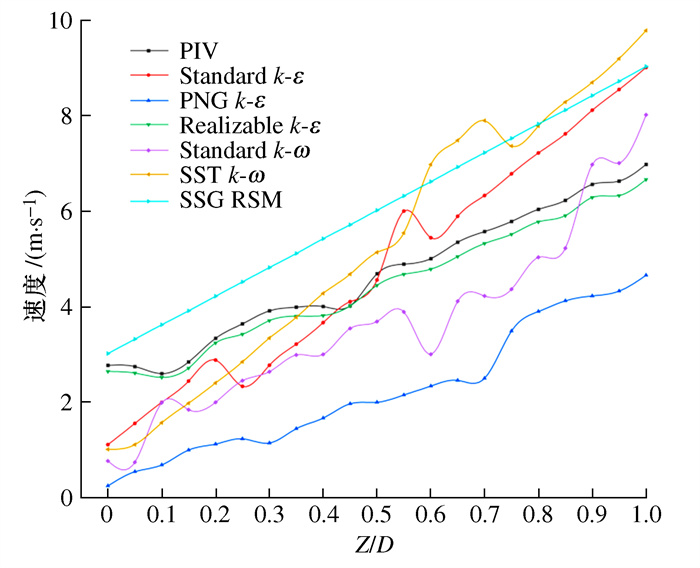
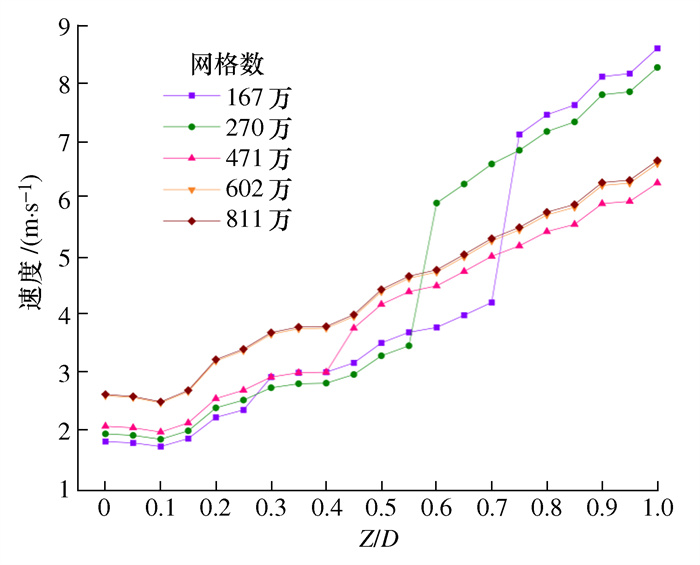
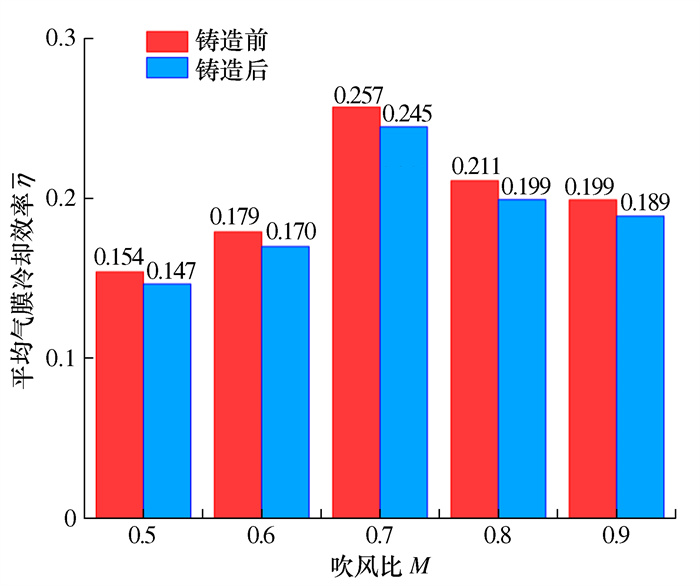
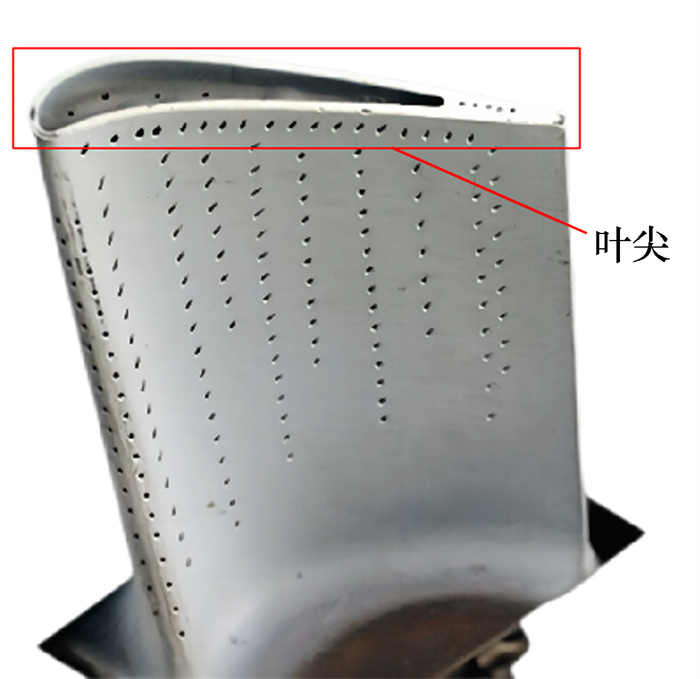
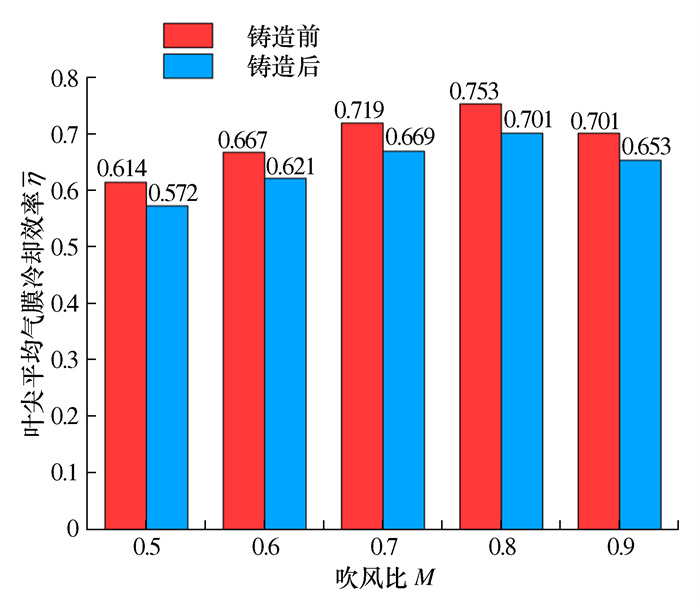
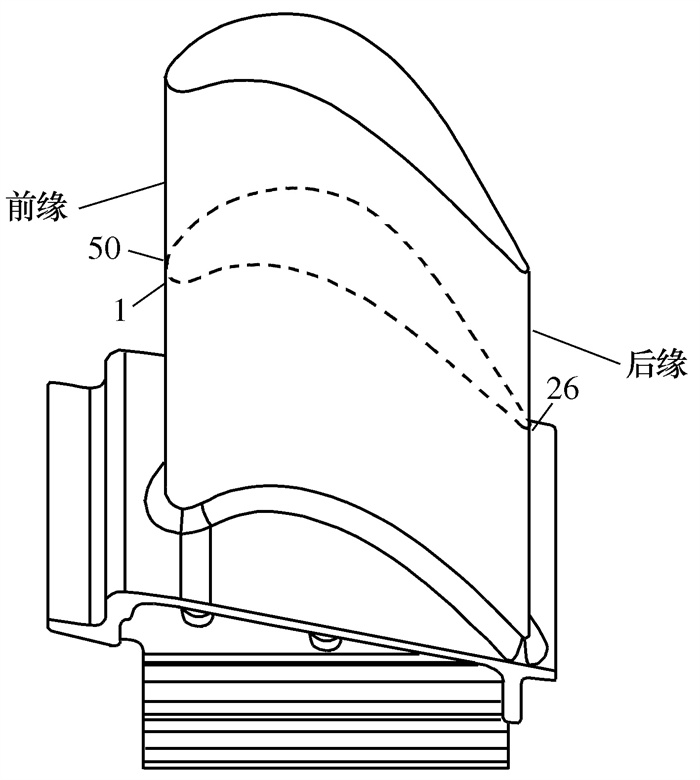
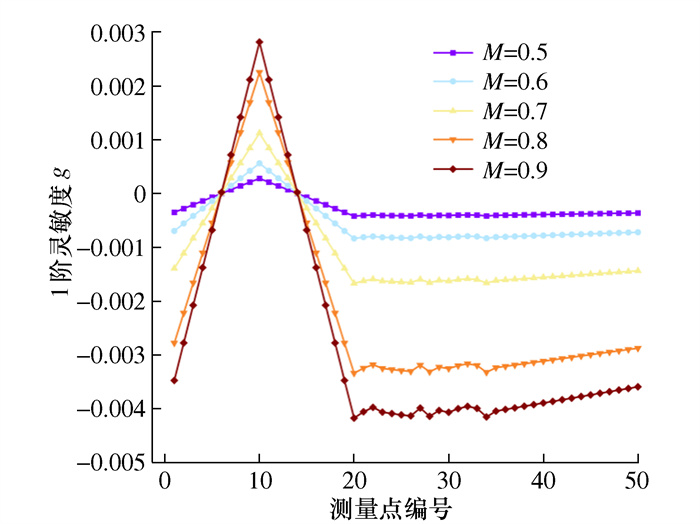
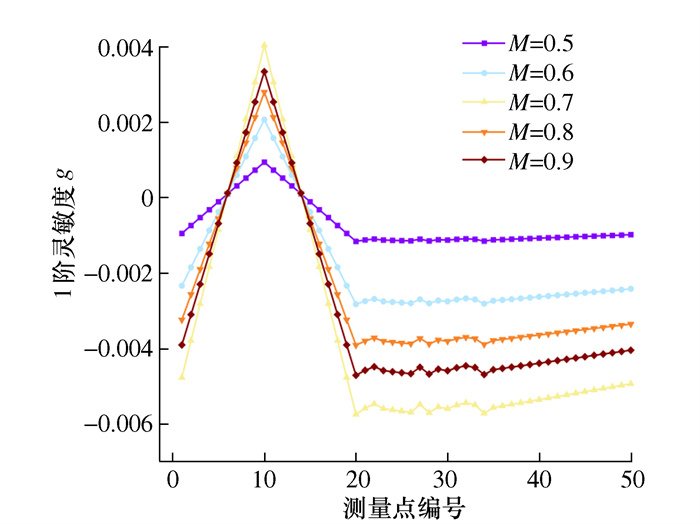
精铸加工使得涡轮叶片几何结构与设计之间产生随机性偏差, 这一偏差对叶片气膜冷却效率造成不确定性影响。涡轮叶片外形偏差的不确定性是几何层面的小扰动问题。本文通过精铸模拟建立了涡轮叶片精铸变形模型。基于PIV与数值模拟建立了适用于流热耦合计算的Realizable k-epsilon湍流模型, 建立了考虑叶片变形的气膜冷却效率灵敏度计算方法, 计算了涡轮叶片的气膜冷却效率随吹风比变化的灵敏度。结果表明: 涡轮叶片精铸产生的变形越大, 对原有气膜冷却效率的损失越大。叶片整体平均形变0.25 mm使得整体气膜冷却效率损失约5%, 局部形变如叶尖叶片后缘处的0.70 mm可使叶尖平均气膜冷却效率损失约8%。由灵敏度分析确定的精铸后气膜冷却效率相对误差较明显, 达到了1.62%。
精铸加工使得涡轮叶片几何结构与设计之间产生随机性偏差, 这一偏差对叶片气膜冷却效率造成不确定性影响。涡轮叶片外形偏差的不确定性是几何层面的小扰动问题。本文通过精铸模拟建立了涡轮叶片精铸变形模型。基于PIV与数值模拟建立了适用于流热耦合计算的Realizable k-epsilon湍流模型, 建立了考虑叶片变形的气膜冷却效率灵敏度计算方法, 计算了涡轮叶片的气膜冷却效率随吹风比变化的灵敏度。结果表明: 涡轮叶片精铸产生的变形越大, 对原有气膜冷却效率的损失越大。叶片整体平均形变0.25 mm使得整体气膜冷却效率损失约5%, 局部形变如叶尖叶片后缘处的0.70 mm可使叶尖平均气膜冷却效率损失约8%。由灵敏度分析确定的精铸后气膜冷却效率相对误差较明显, 达到了1.62%。
2024,
43(7):
1158-1167. doi: 10.13433/j.cnki.1003-8728.20240024
摘要:
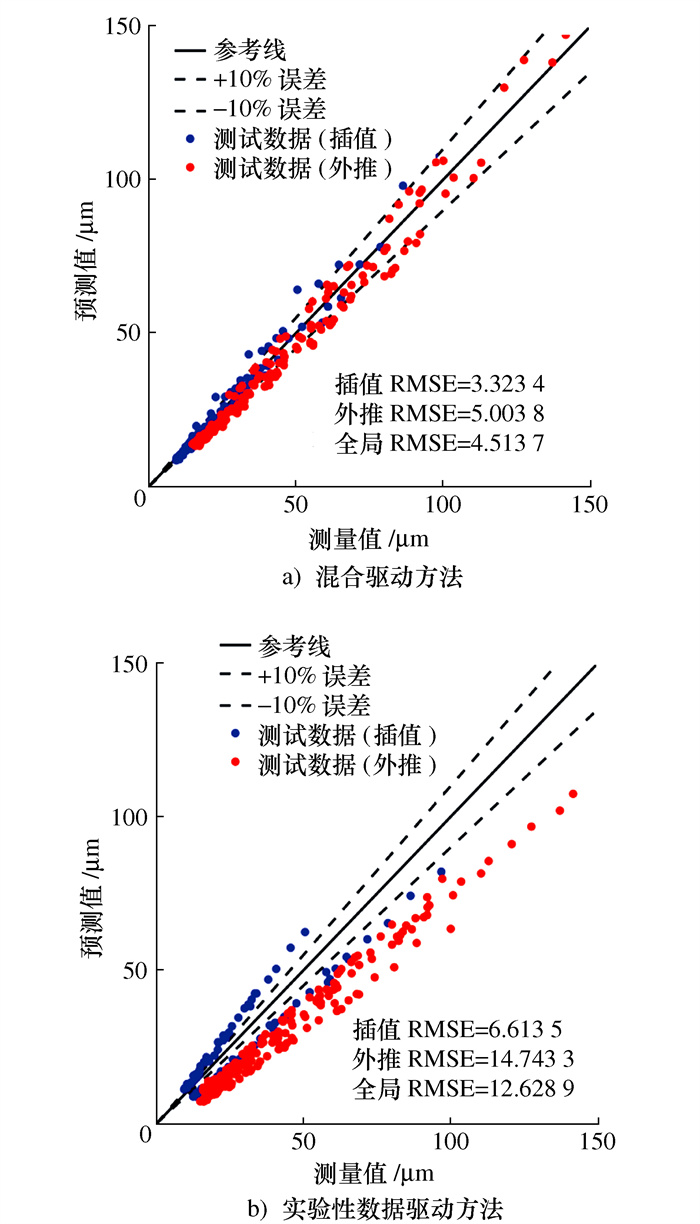
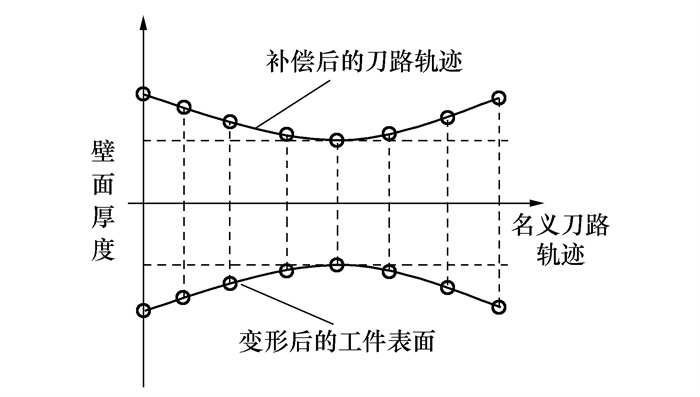
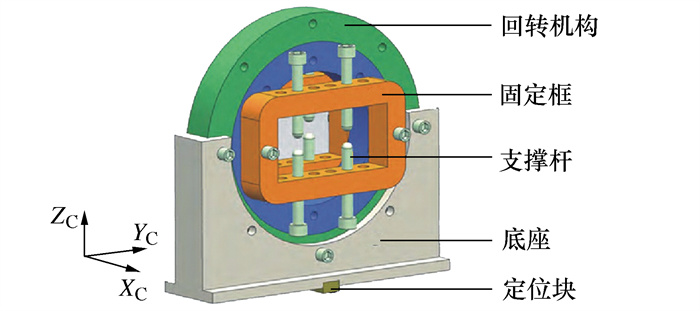
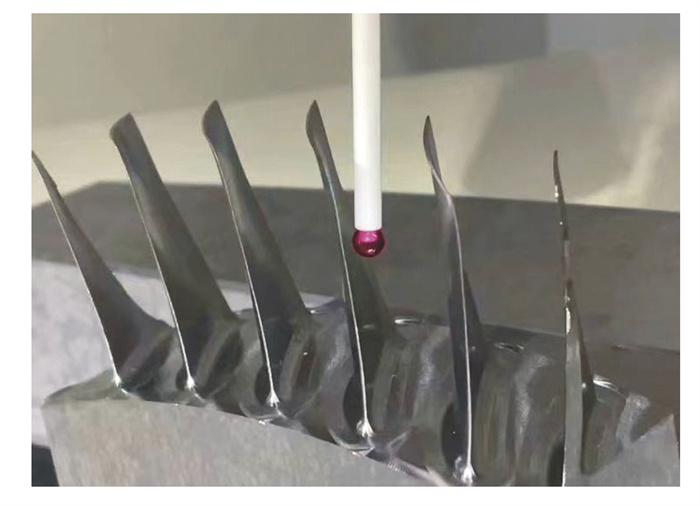
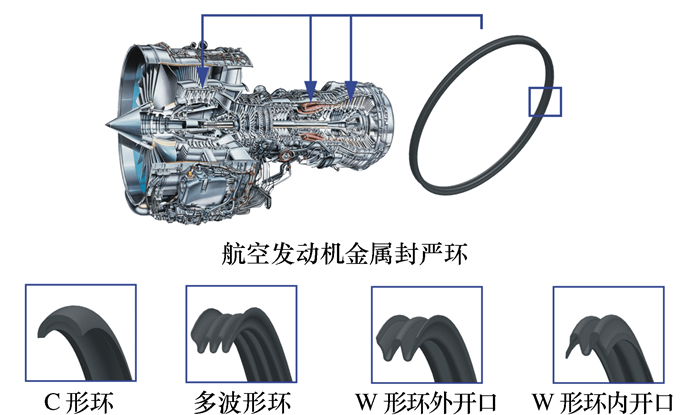
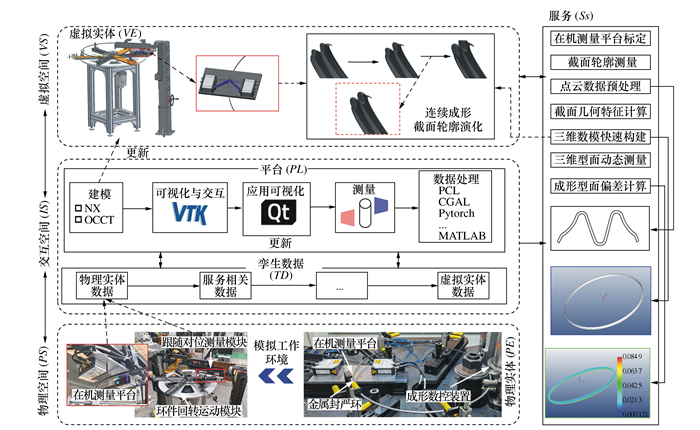
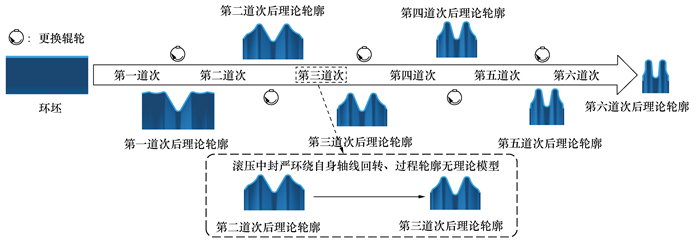
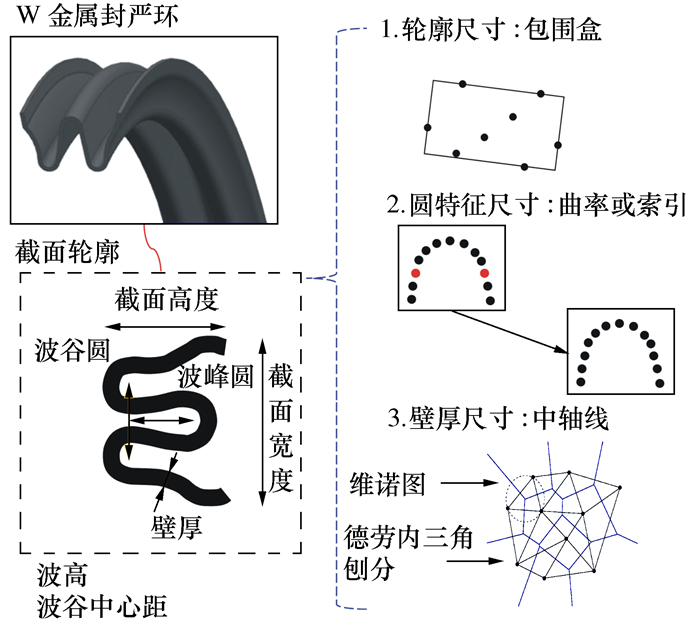
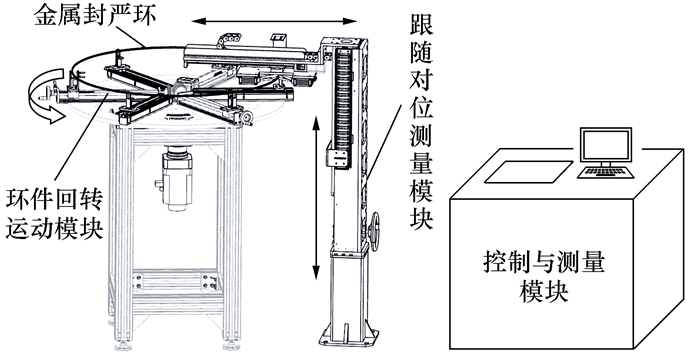
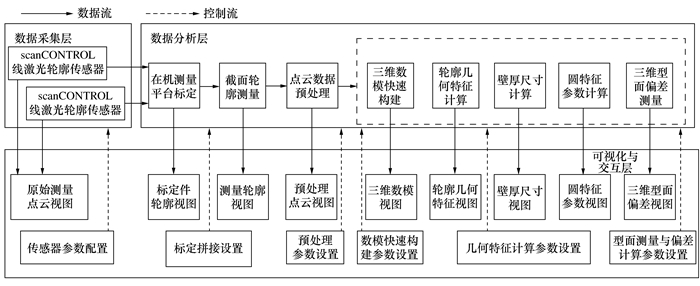
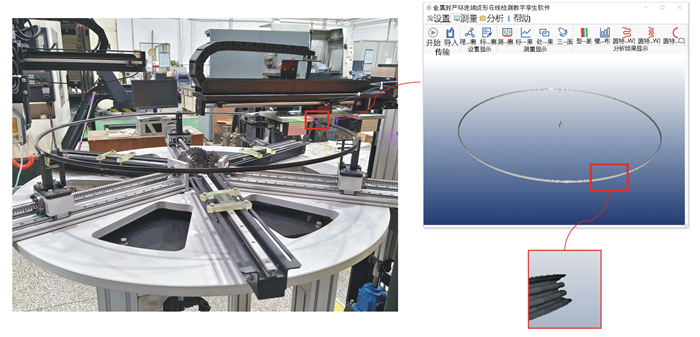
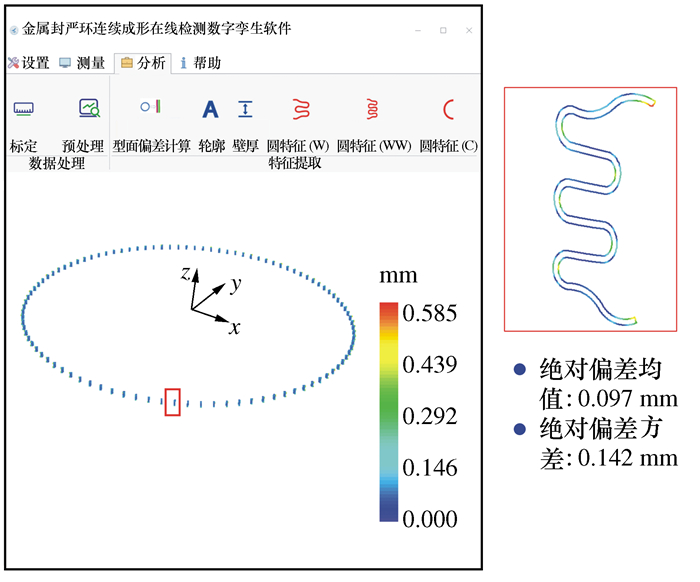
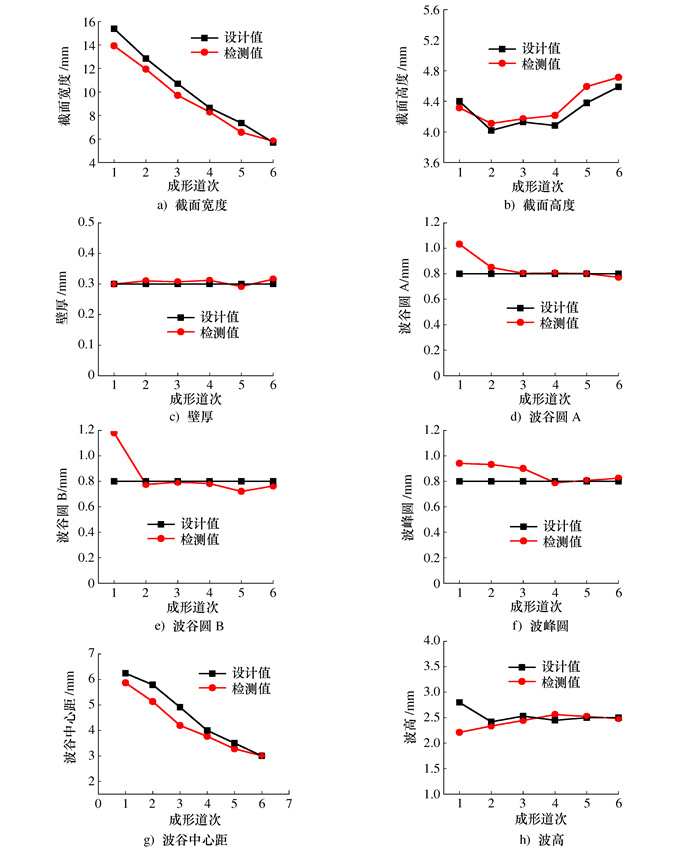
金属封严环广泛应用于航空发动机密封系统,其型面成形质量对飞行器高性能、高可靠服役具有重要影响。然而,薄壁、复杂的异形截面与封闭的环形结构等导致其在几何质量检测方面存在以下问题:其一,成形结果严重依赖于破坏性抽样终检,实际产品均未经过完整质量检测;其二,成形过程无几何质量检测手段,无法及时发现成形缺陷,轮廓几何数据的缺失,使工艺优化设计困难。因此,提出一种金属封严环数字孪生几何模型框架,该框架包括:物理空间、虚拟空间、交互空间与服务,可提供在机测量平台标定、截面轮廓测量、点云数据预处理、截面几何特征计算、三维数模快速构建、三维型面动态测量与偏差计算等连续成形质量在线检测技术,建立起反映金属封严环成形过程中变化的数字孪生几何模型,从而为金属封严环成形质量的检测、分析、预测以及后续工艺优化设计所需的基础数据获取等提供支撑。在此基础上,研制了在线检测模拟试验装置与数字孪生软件,介绍了金属封严环数字孪生几何模型的应用情况。
金属封严环广泛应用于航空发动机密封系统,其型面成形质量对飞行器高性能、高可靠服役具有重要影响。然而,薄壁、复杂的异形截面与封闭的环形结构等导致其在几何质量检测方面存在以下问题:其一,成形结果严重依赖于破坏性抽样终检,实际产品均未经过完整质量检测;其二,成形过程无几何质量检测手段,无法及时发现成形缺陷,轮廓几何数据的缺失,使工艺优化设计困难。因此,提出一种金属封严环数字孪生几何模型框架,该框架包括:物理空间、虚拟空间、交互空间与服务,可提供在机测量平台标定、截面轮廓测量、点云数据预处理、截面几何特征计算、三维数模快速构建、三维型面动态测量与偏差计算等连续成形质量在线检测技术,建立起反映金属封严环成形过程中变化的数字孪生几何模型,从而为金属封严环成形质量的检测、分析、预测以及后续工艺优化设计所需的基础数据获取等提供支撑。在此基础上,研制了在线检测模拟试验装置与数字孪生软件,介绍了金属封严环数字孪生几何模型的应用情况。
2024,
43(7):
1168-1179. doi: 10.13433/j.cnki.1003-8728.20230009
摘要:
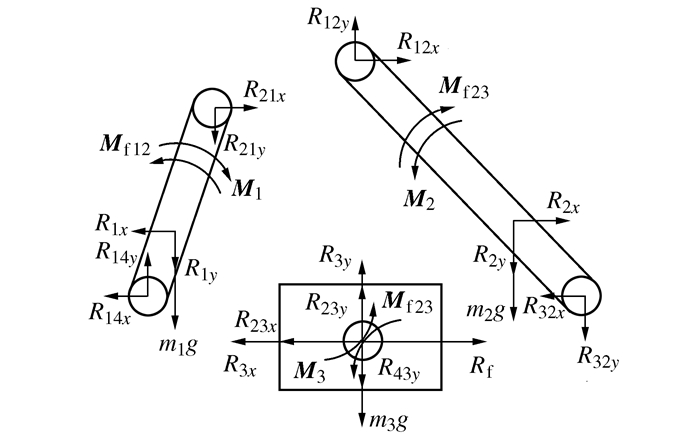
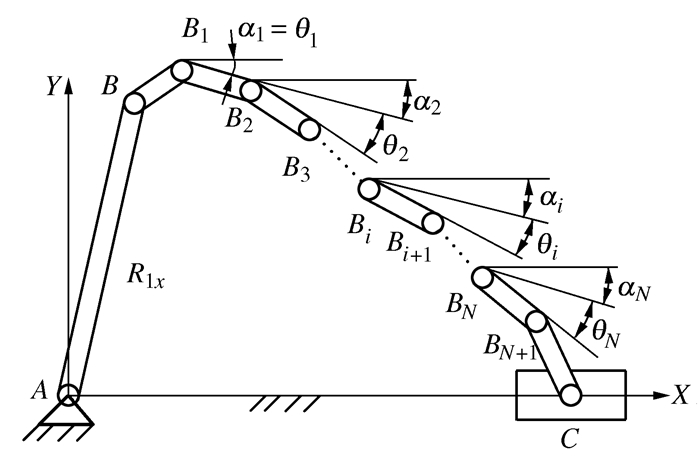
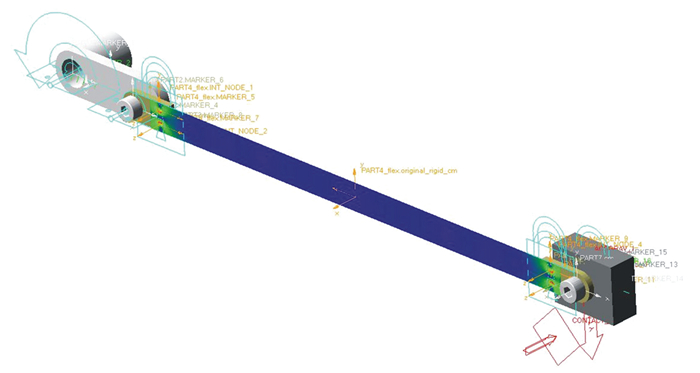
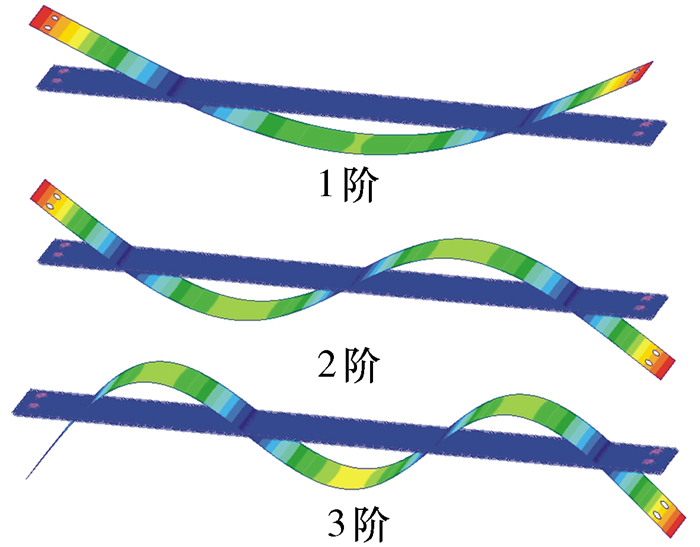
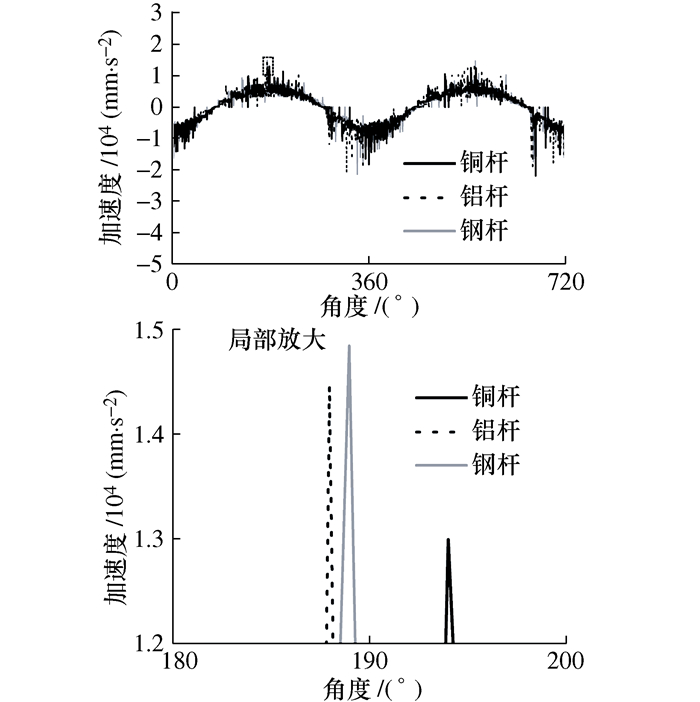
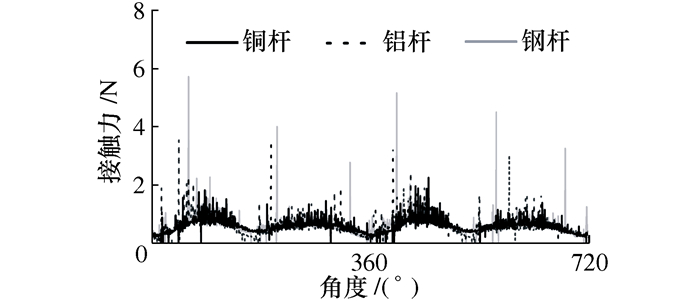
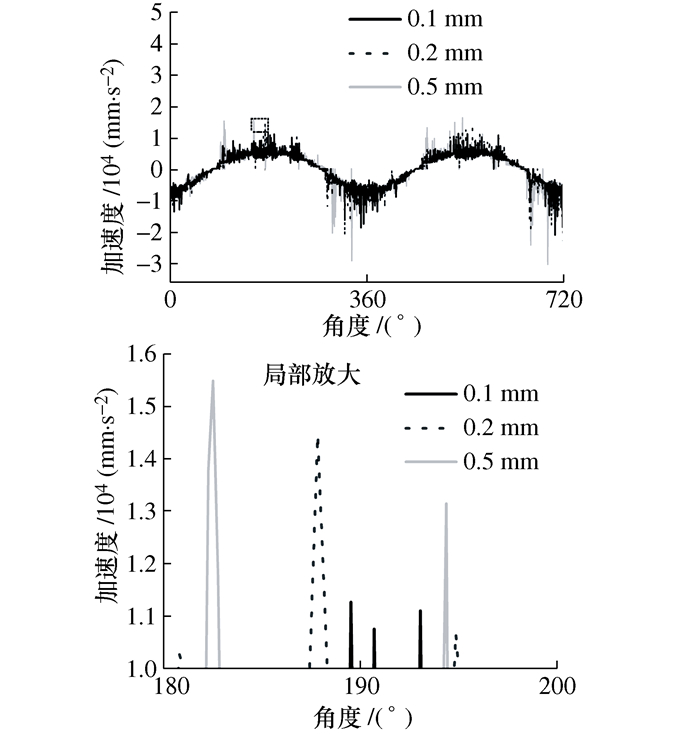
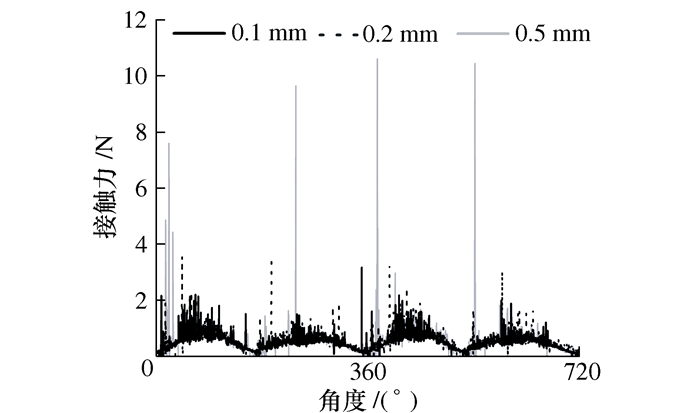
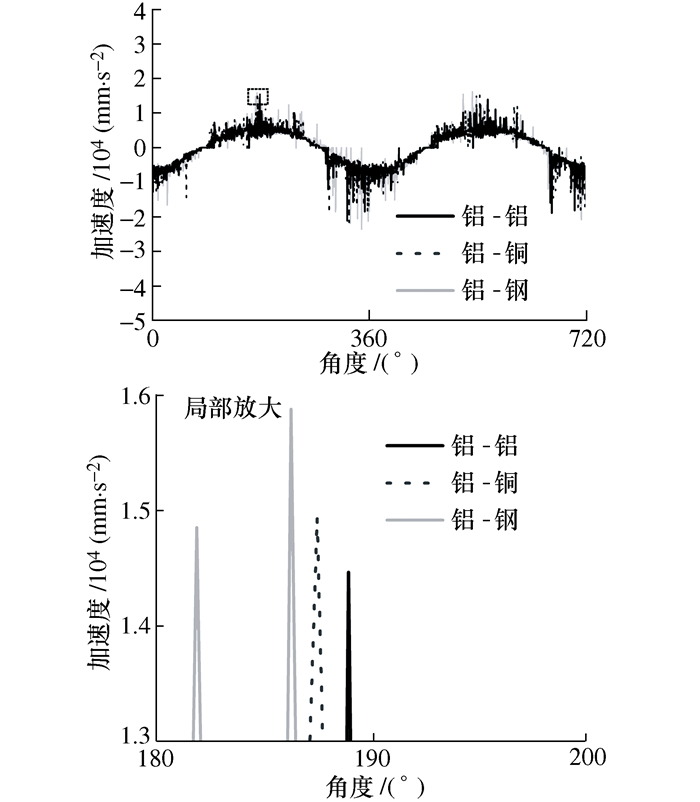
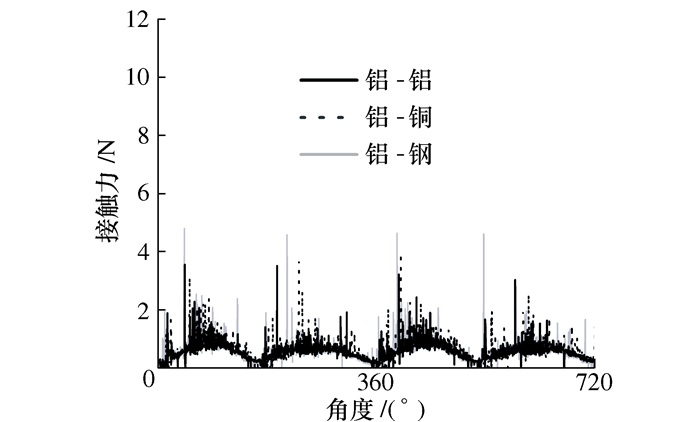
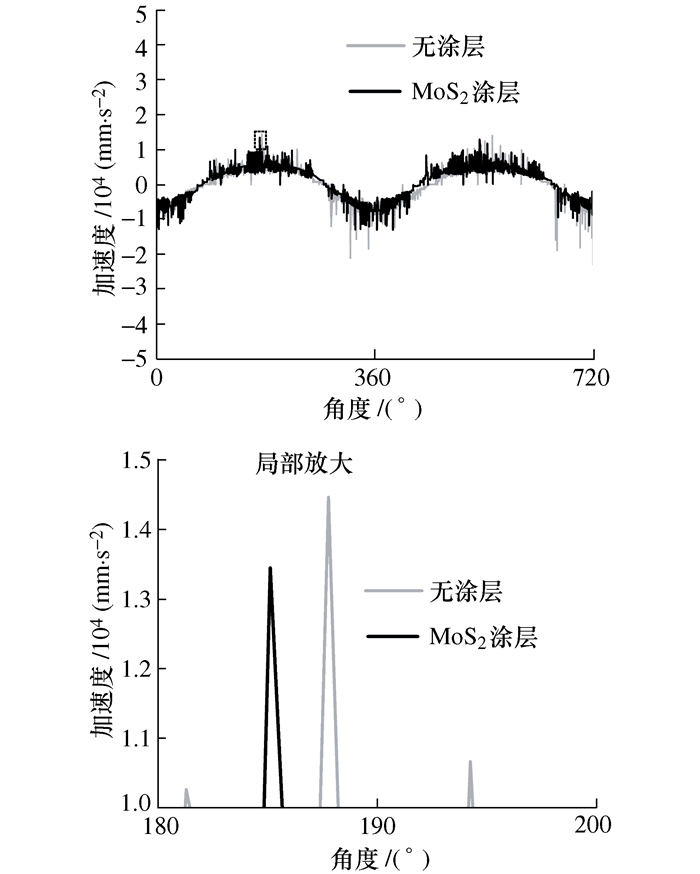
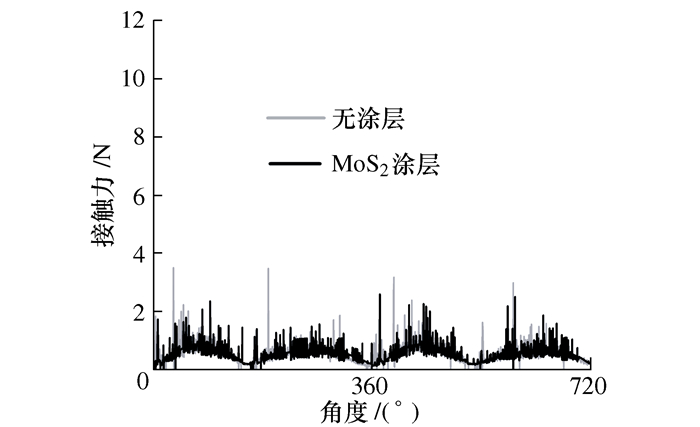
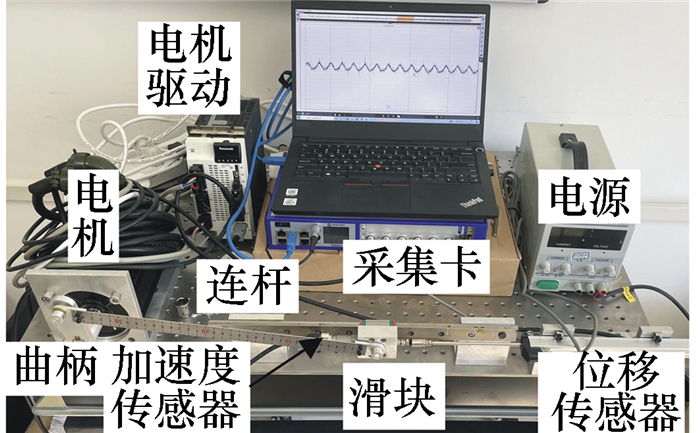
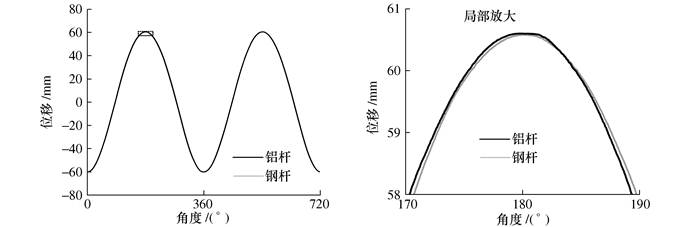
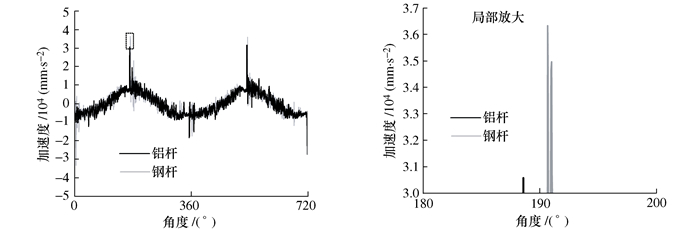
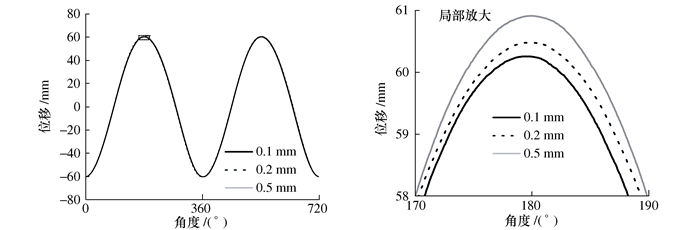
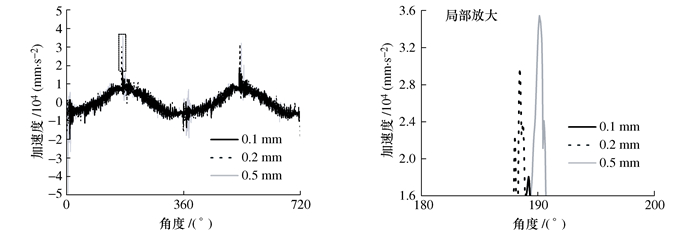
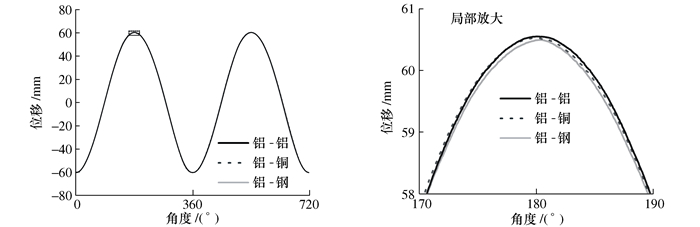
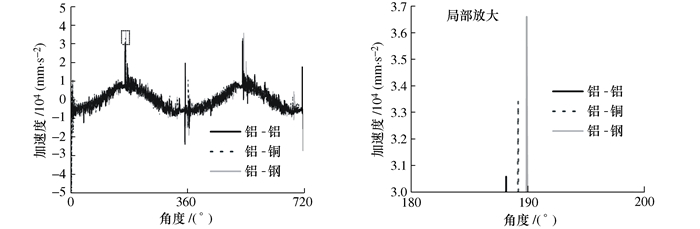
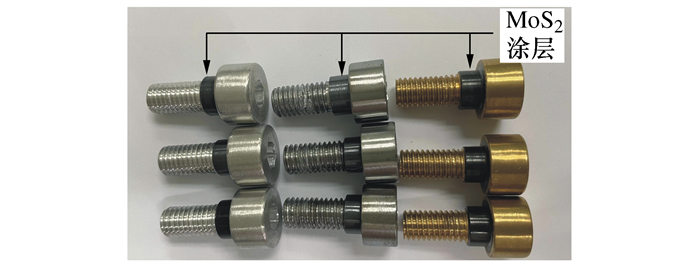
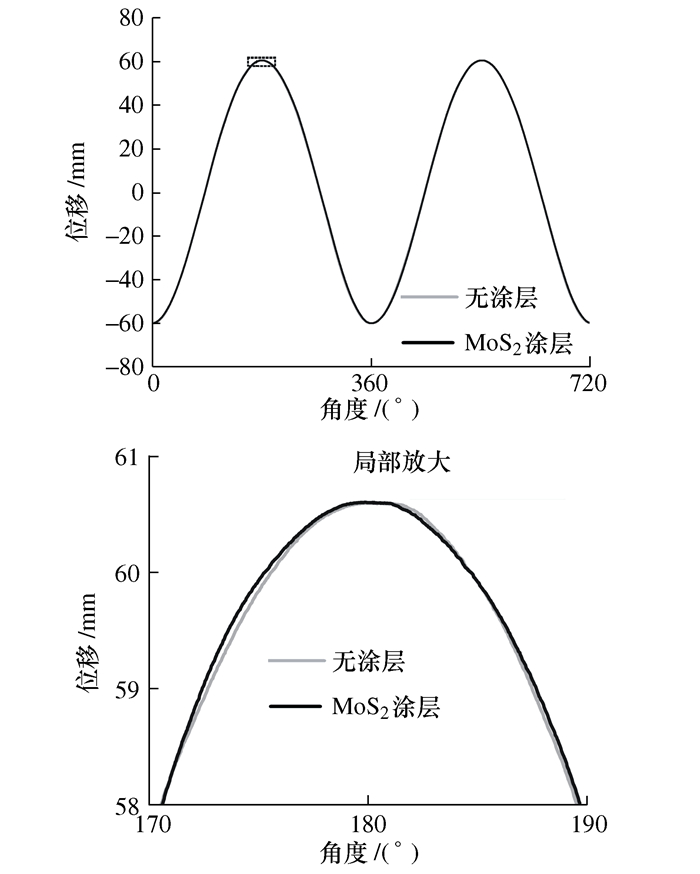
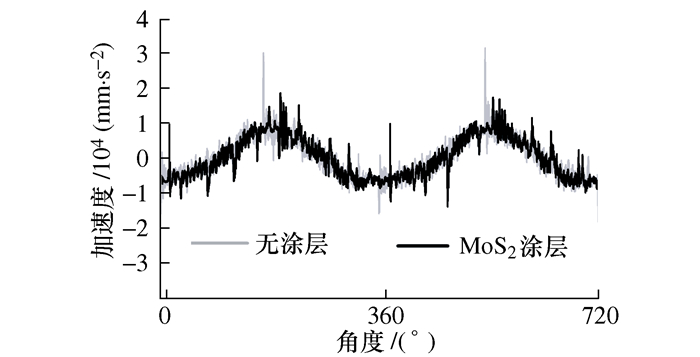
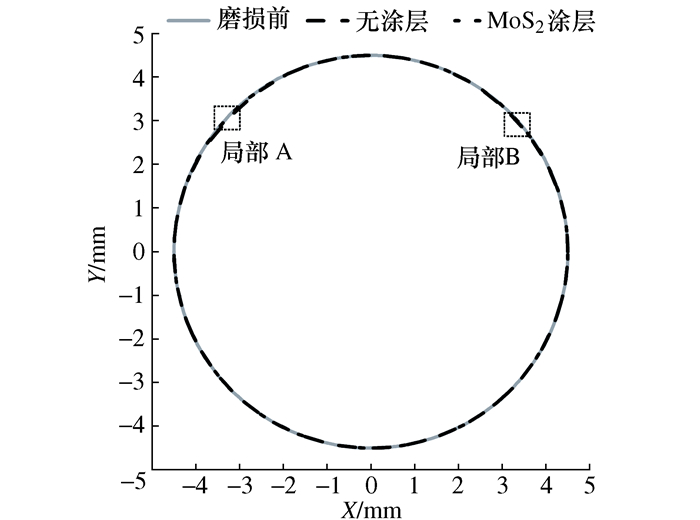
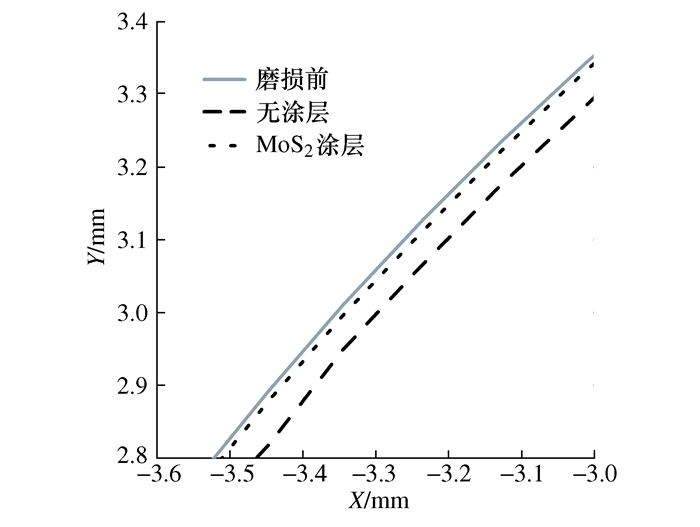
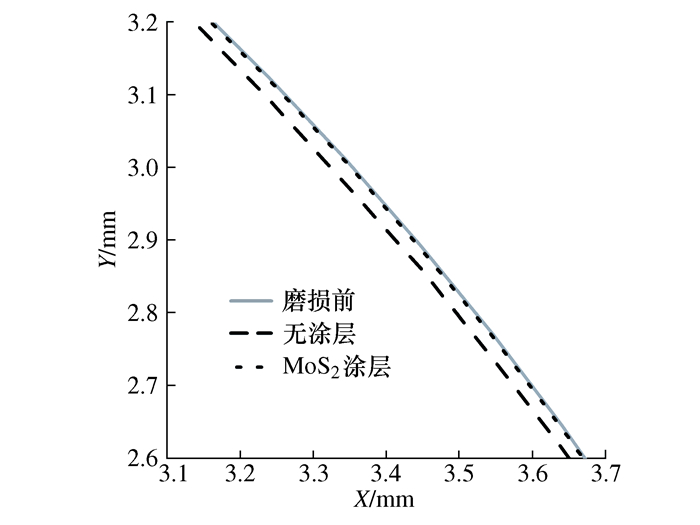
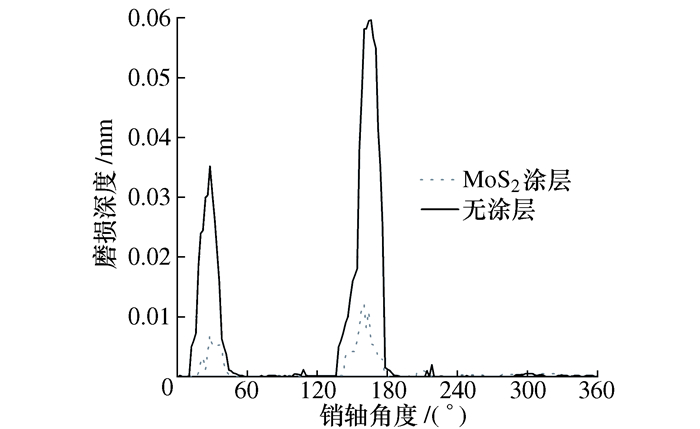
为了研究柔性连杆、带有固体润滑涂层MoS2的铰链接触副对含间隙铰链机构的动力学特性的影响规律,以曲柄滑块机构为研究对象,使用Adams软件进行数值仿真分析,研究了柔性连杆材料、铰链间隙、铰链接触副材料和铰链接触副表面固体润滑涂层对曲柄滑块机构动力学特性的影响。通过搭建与数值仿真参数一致的含间隙铰链的曲柄滑块试验台,试验验证了柔性大的连杆、较小的间隙值、接触刚度较小的接触副材料能够减小机构的振动,带有涂层的铰链能够有效减小接触面的磨损量。试验结果和数值仿真结果较为一致,能够有效的反应各种工况对含间隙机构的影响规律,为固体润滑涂层在航天领域中含间隙铰链接触副展开机构的减振抗冲击研究提供理论基础和试验依据。
为了研究柔性连杆、带有固体润滑涂层MoS2的铰链接触副对含间隙铰链机构的动力学特性的影响规律,以曲柄滑块机构为研究对象,使用Adams软件进行数值仿真分析,研究了柔性连杆材料、铰链间隙、铰链接触副材料和铰链接触副表面固体润滑涂层对曲柄滑块机构动力学特性的影响。通过搭建与数值仿真参数一致的含间隙铰链的曲柄滑块试验台,试验验证了柔性大的连杆、较小的间隙值、接触刚度较小的接触副材料能够减小机构的振动,带有涂层的铰链能够有效减小接触面的磨损量。试验结果和数值仿真结果较为一致,能够有效的反应各种工况对含间隙机构的影响规律,为固体润滑涂层在航天领域中含间隙铰链接触副展开机构的减振抗冲击研究提供理论基础和试验依据。
2024,
43(7):
1180-1188. doi: 10.13433/j.cnki.1003-8728.20230041
摘要:
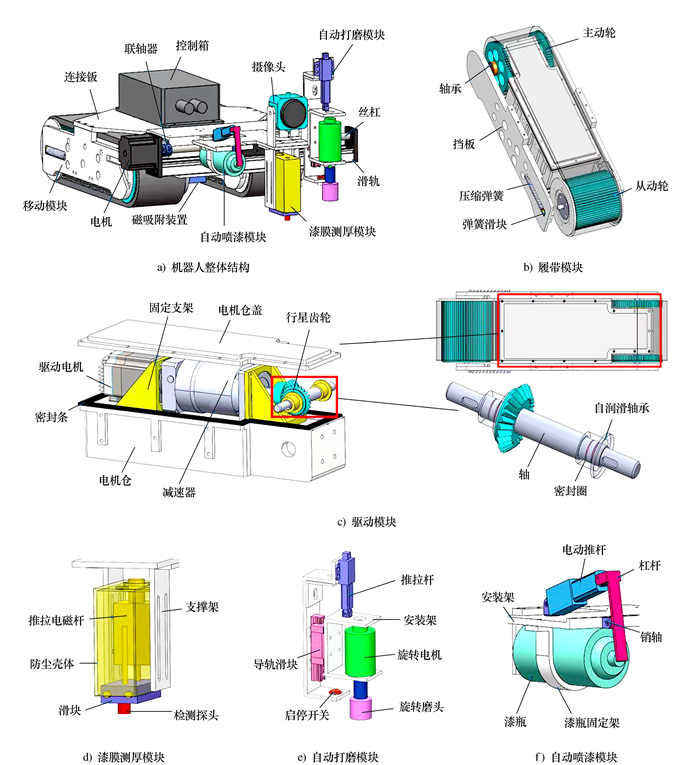
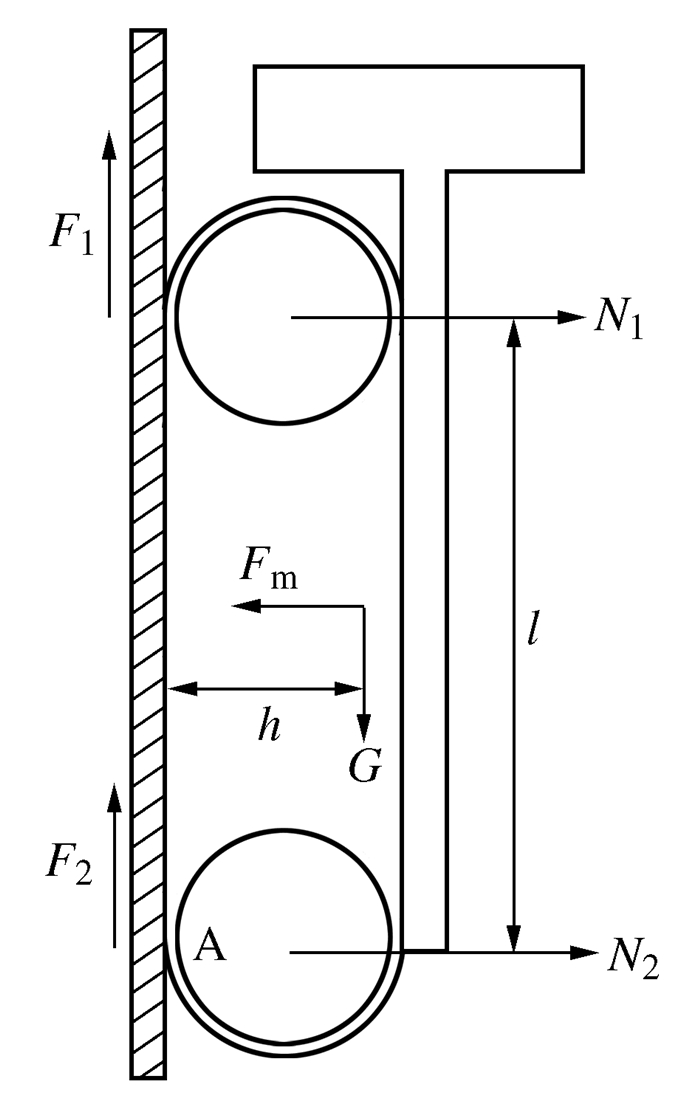
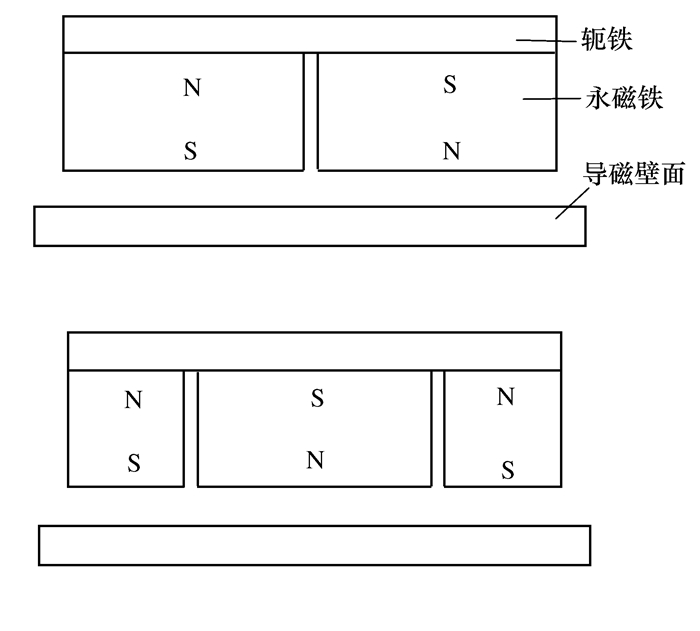
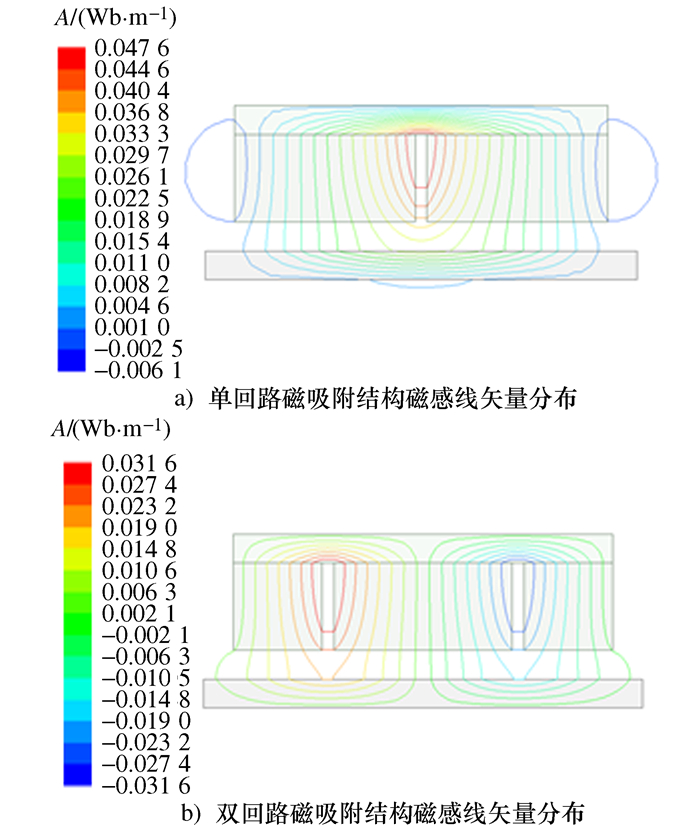
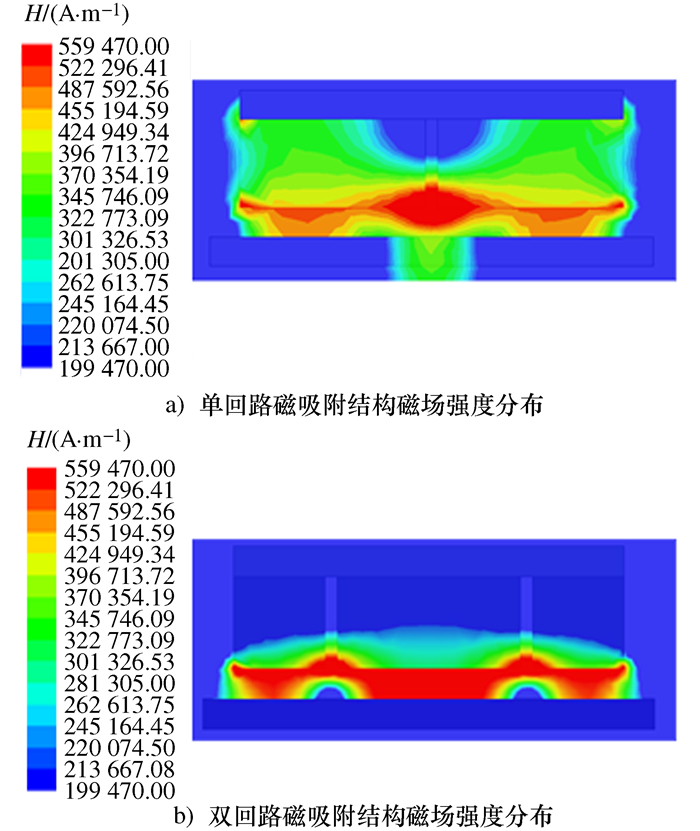
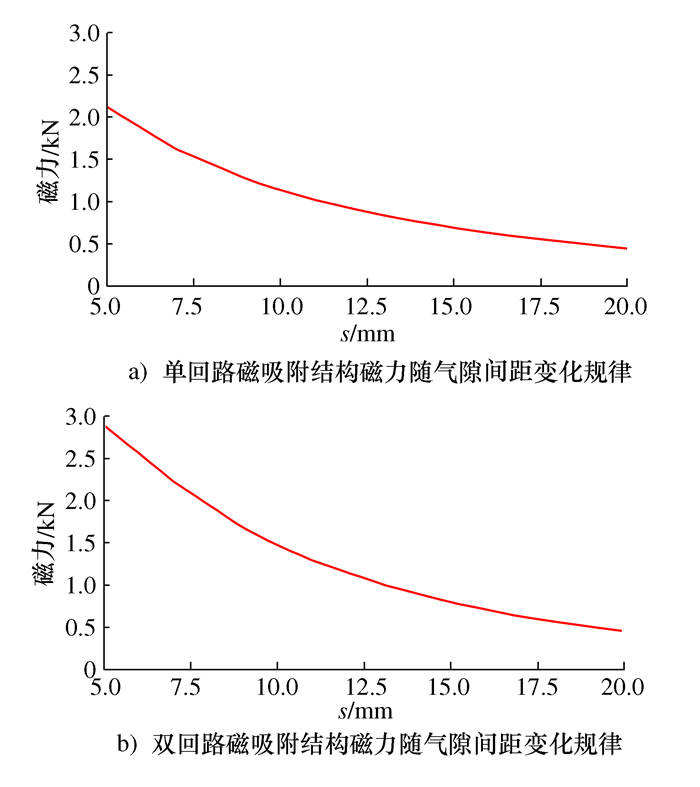
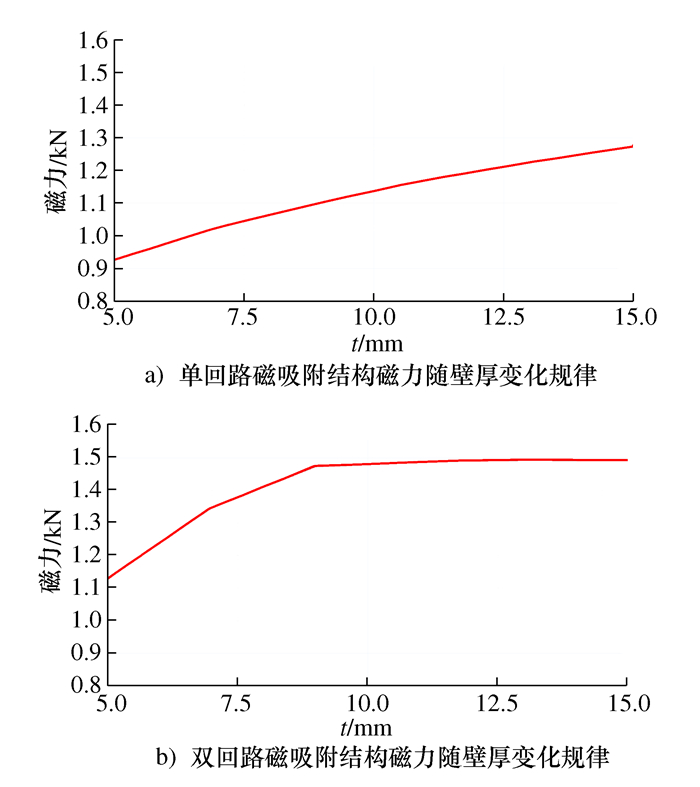
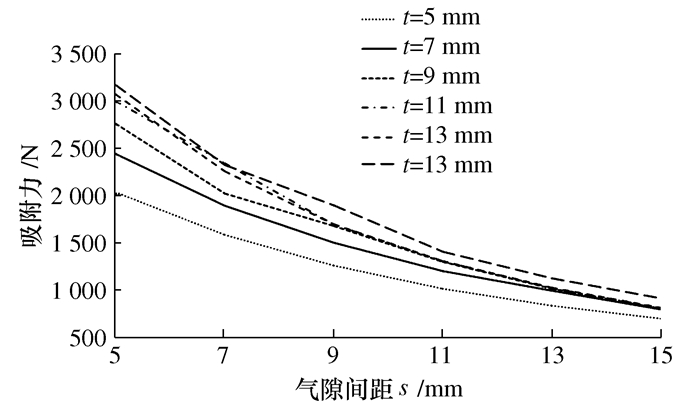
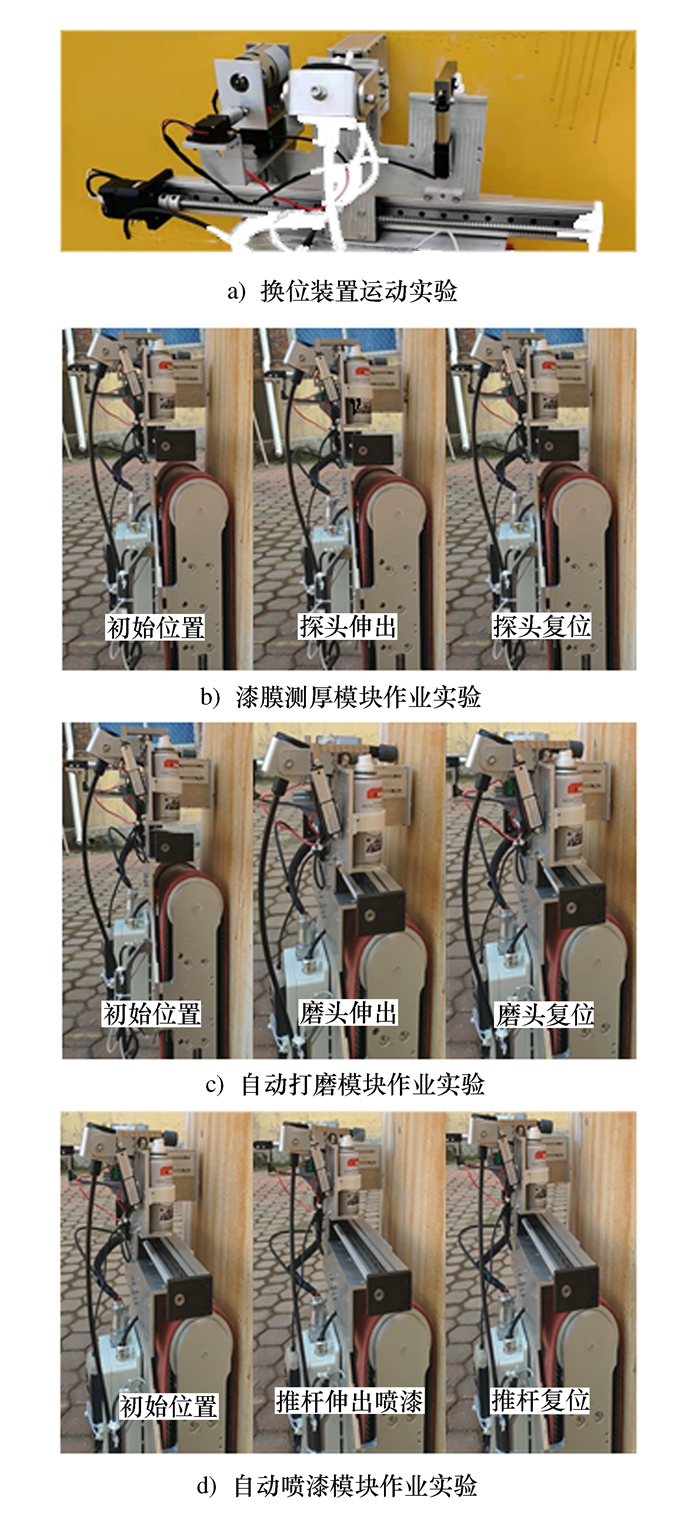
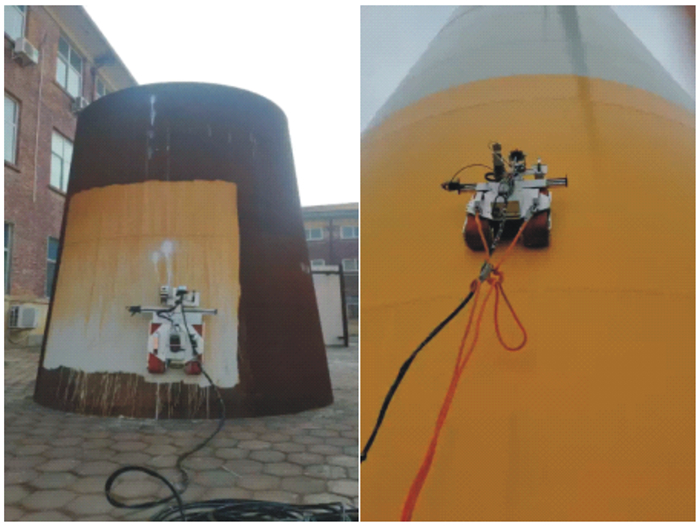
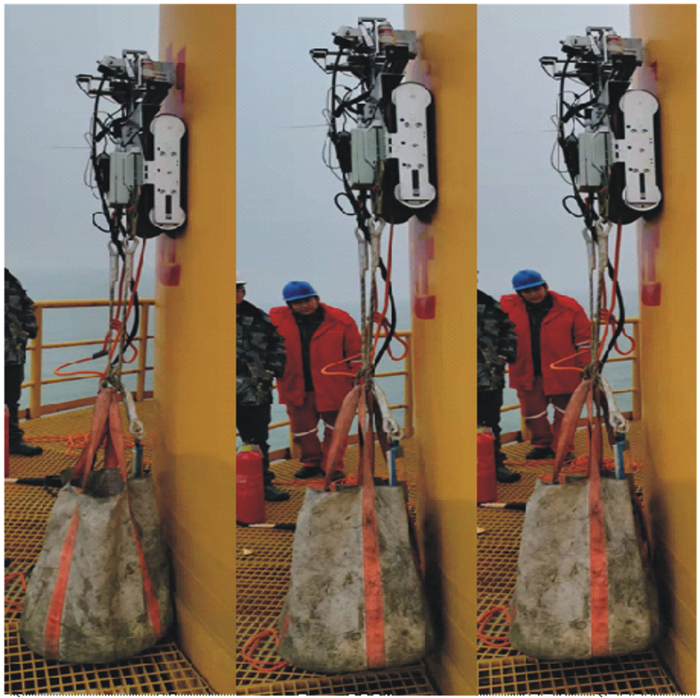
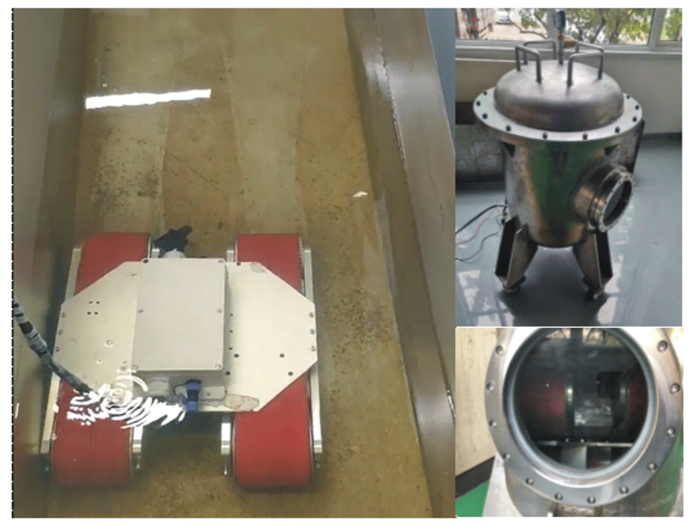
为解决传统爬壁机器人在海上风电塔筒立面的作业效率低下和吸附力不足问题,根据模块化设计方法,提出一种可同时用于表面漆膜检测及运维的模块化履带式爬壁机器人。本文详细介绍作业机器人的结构组成及原理,为防止机器人发生滑落和倾覆现象,对其进行力学分析;构建间隙式永磁吸附模型,利用Maxwell软件与传统磁路设计进行参数化仿真对比,并分析气隙和壁厚对机器人吸附力的影响;通过样机平台模拟实验和真实作业,表明机器人能以稳定运动姿态实现塔筒高空及水下作业,验证了其模块化作业的可行性,并同时具备较强的吸附能力和越障能力。
为解决传统爬壁机器人在海上风电塔筒立面的作业效率低下和吸附力不足问题,根据模块化设计方法,提出一种可同时用于表面漆膜检测及运维的模块化履带式爬壁机器人。本文详细介绍作业机器人的结构组成及原理,为防止机器人发生滑落和倾覆现象,对其进行力学分析;构建间隙式永磁吸附模型,利用Maxwell软件与传统磁路设计进行参数化仿真对比,并分析气隙和壁厚对机器人吸附力的影响;通过样机平台模拟实验和真实作业,表明机器人能以稳定运动姿态实现塔筒高空及水下作业,验证了其模块化作业的可行性,并同时具备较强的吸附能力和越障能力。

2024,
43(7):
1189-1198. doi: 10.13433/j.cnki.1003-8728.20230040
摘要:
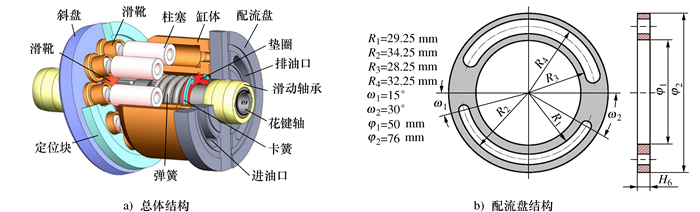
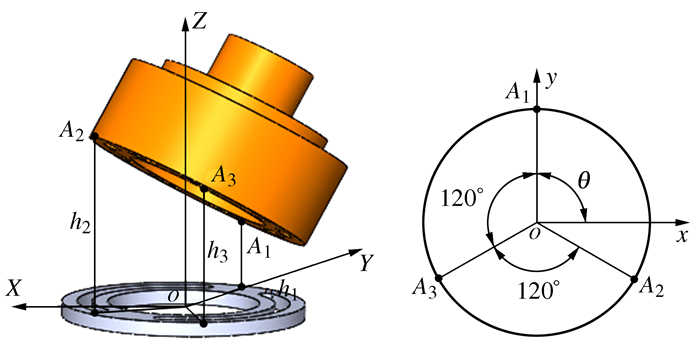
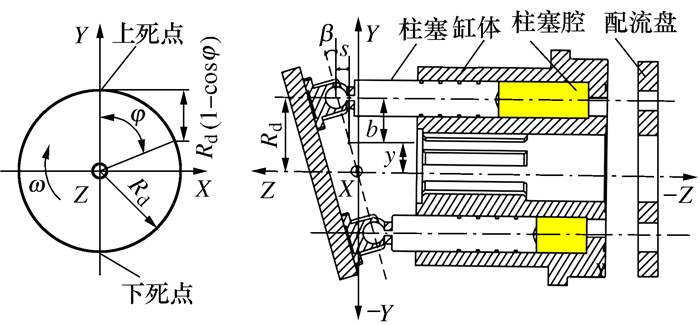
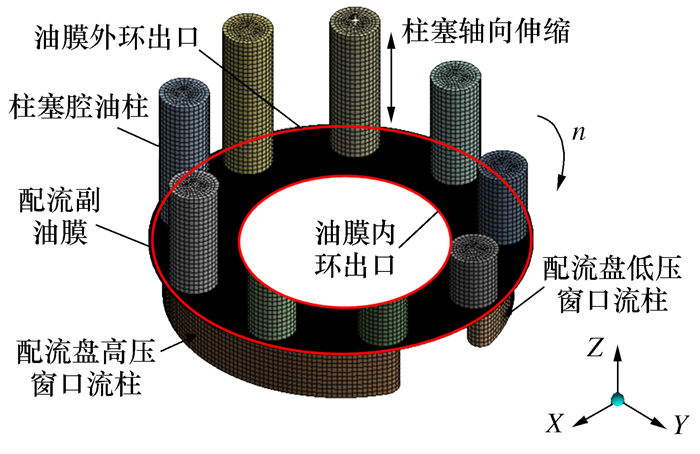
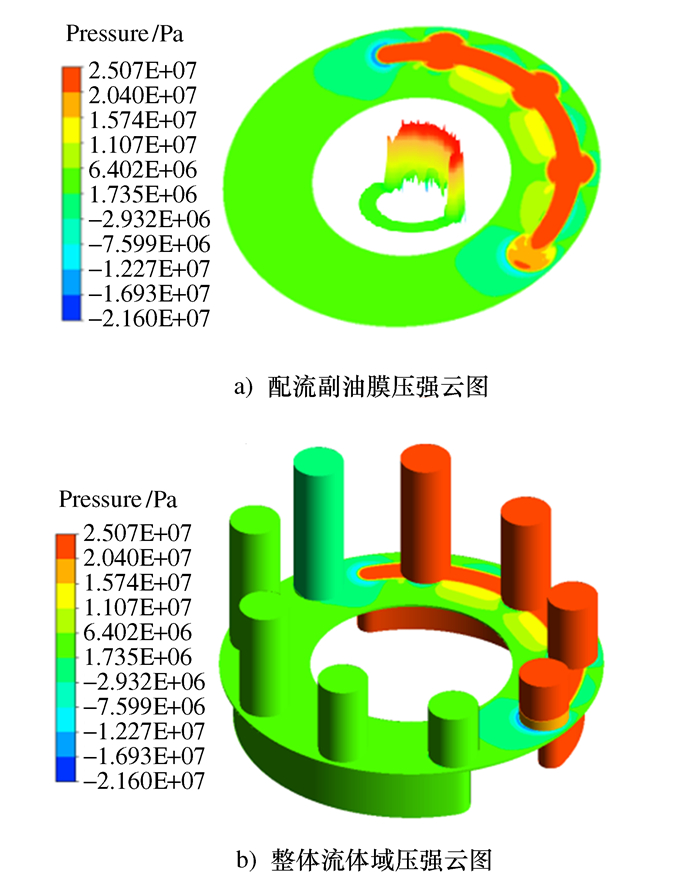
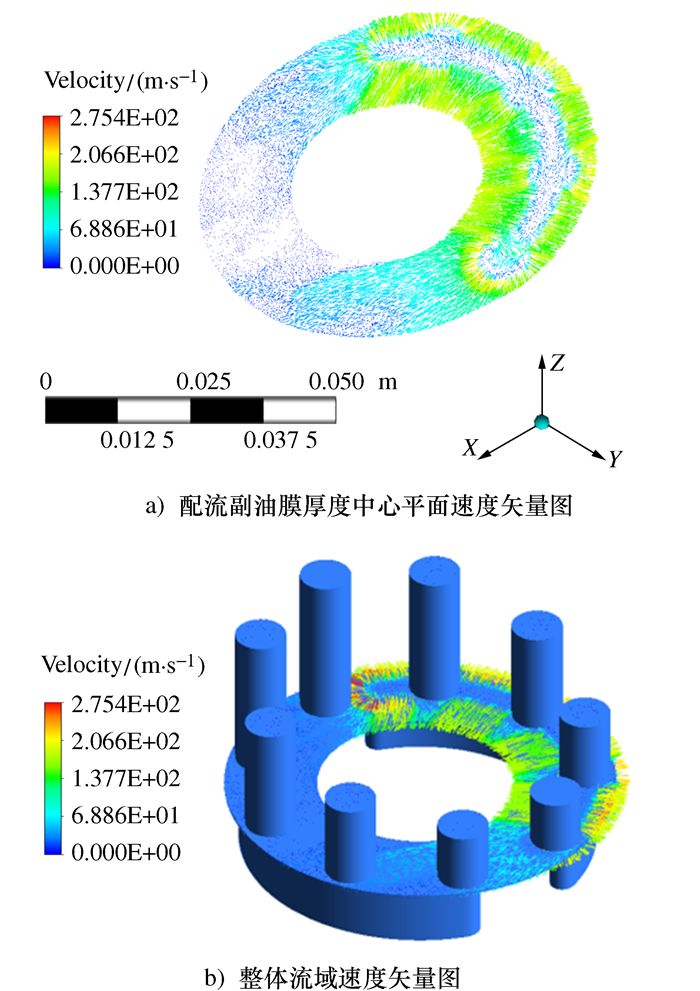
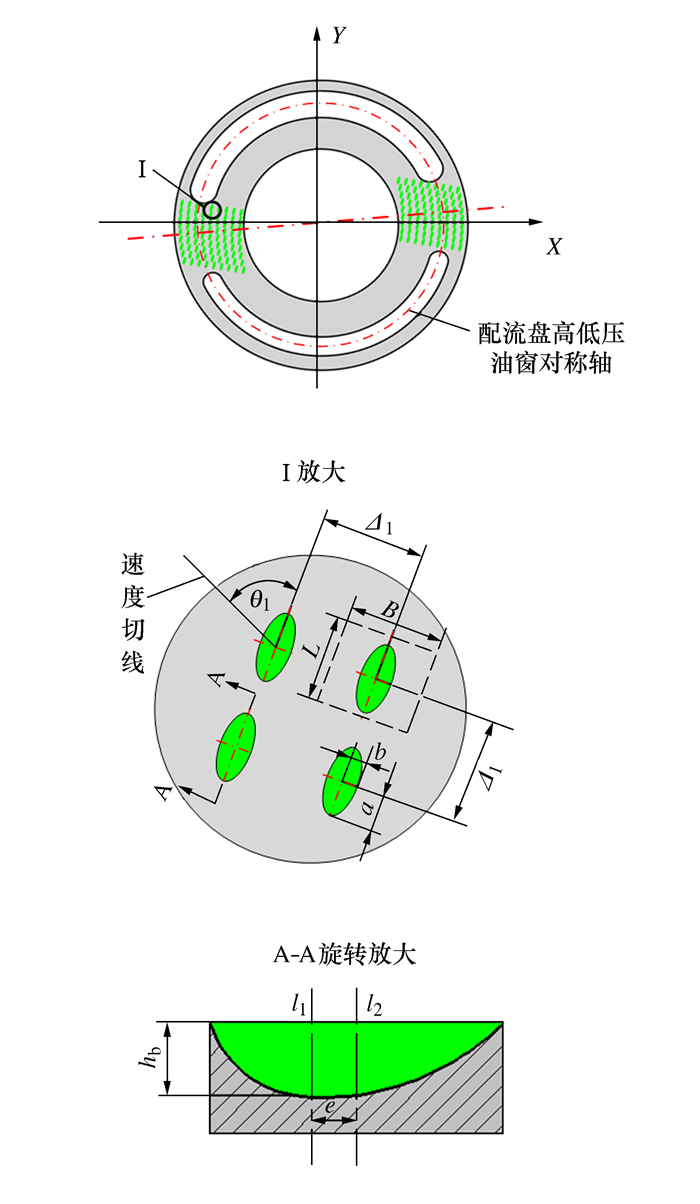
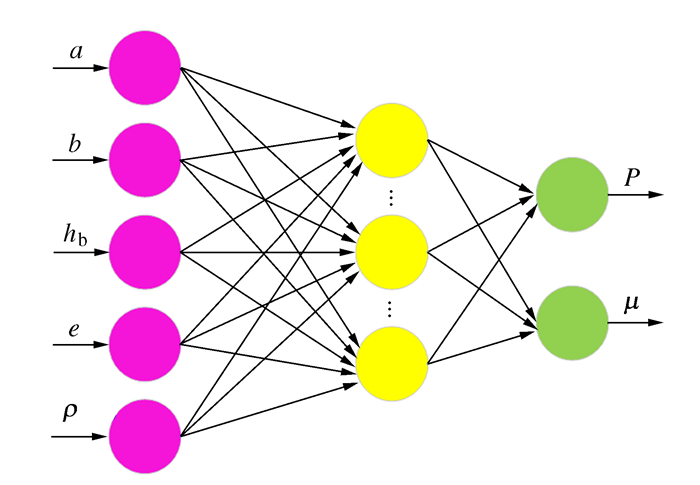
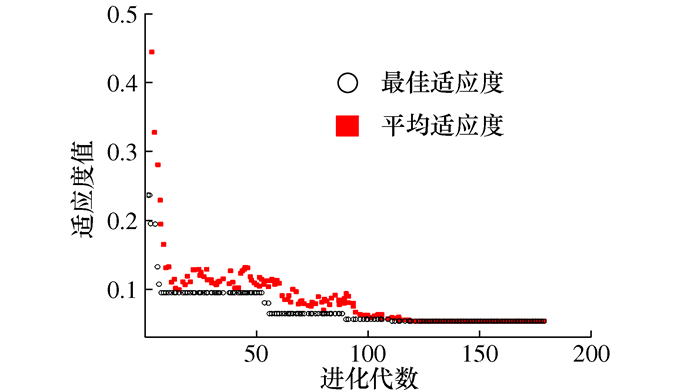
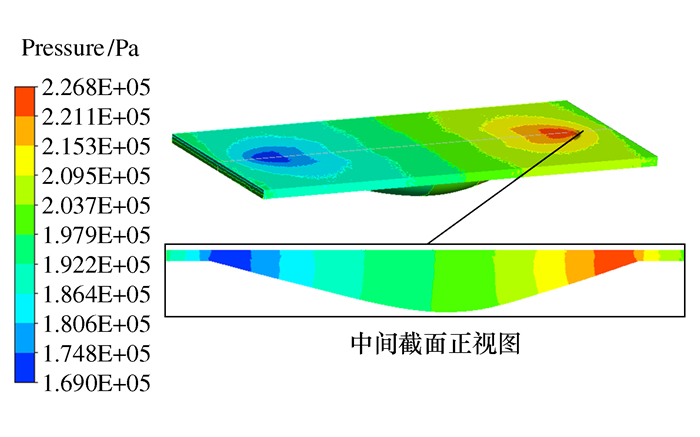
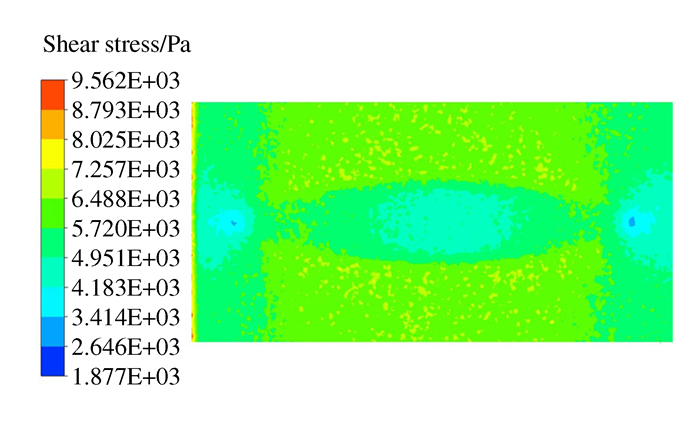
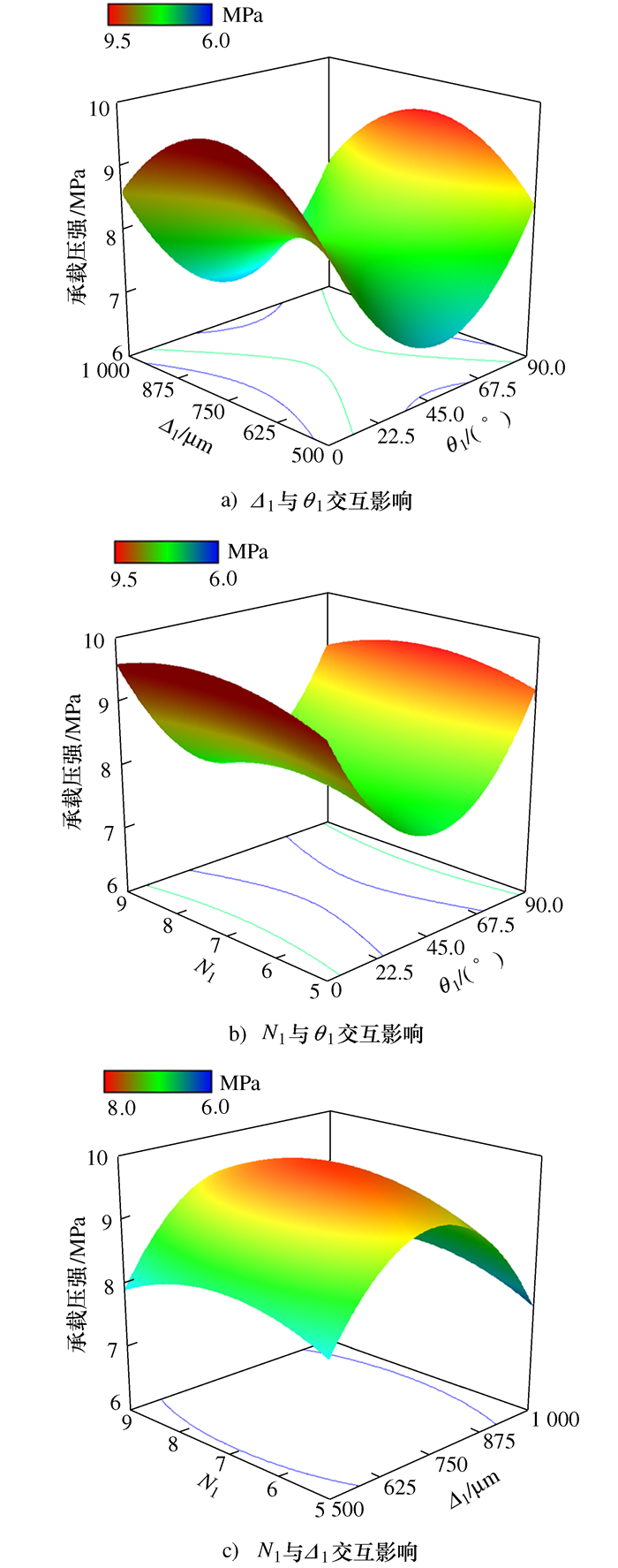
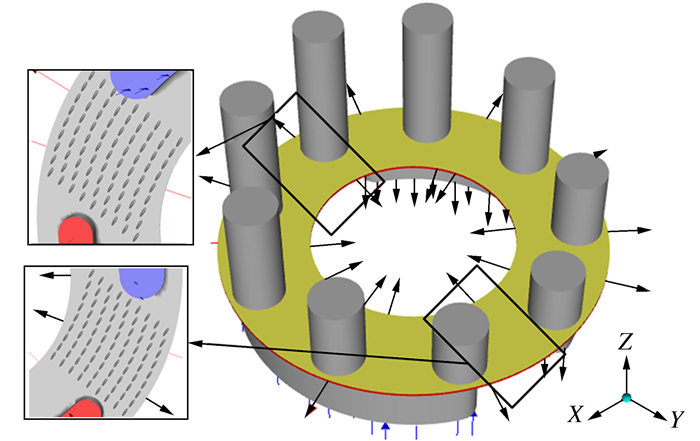
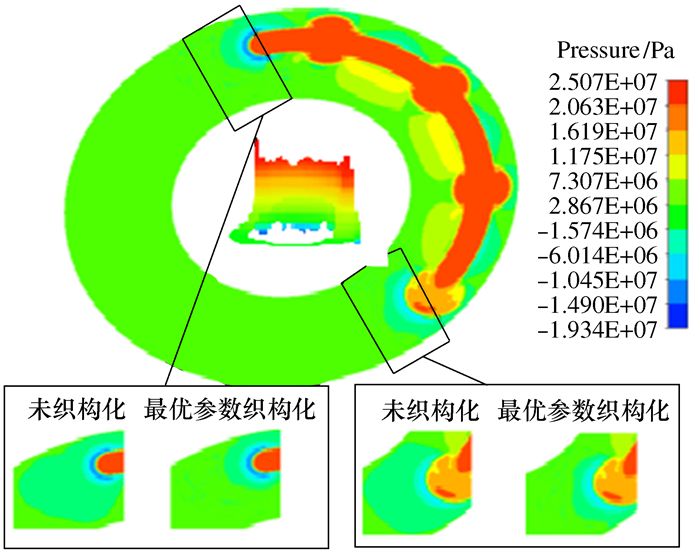
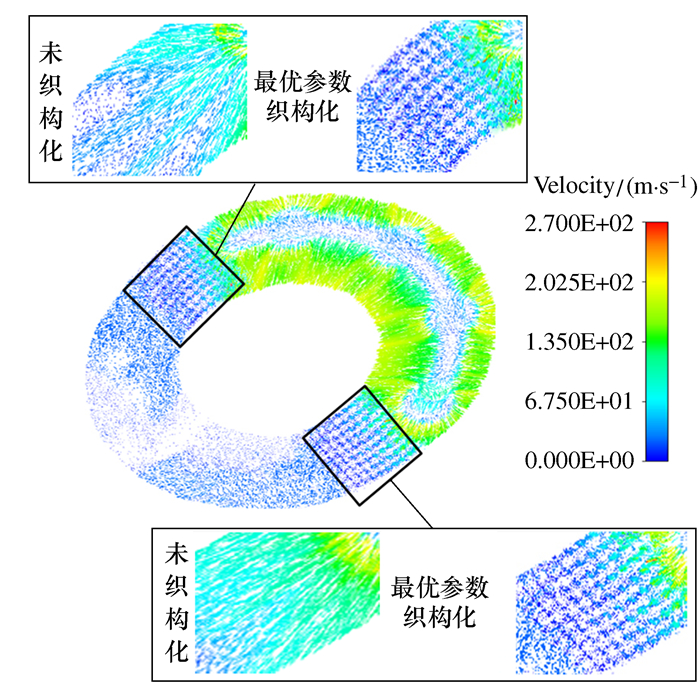
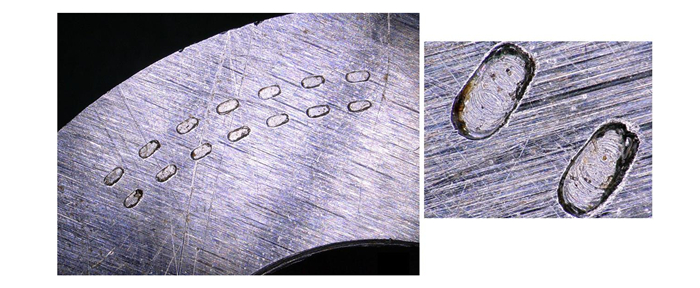
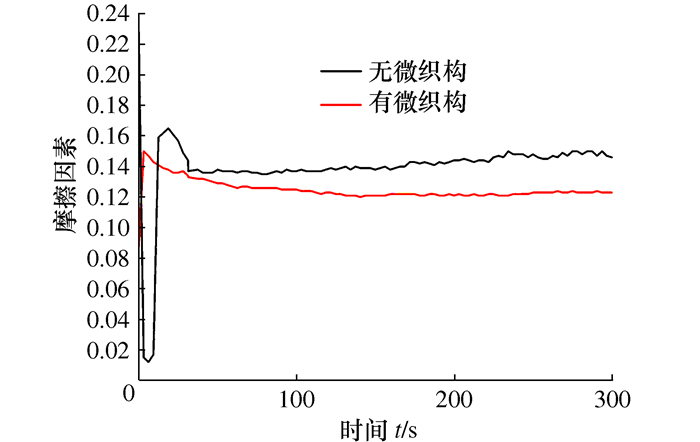
为了提高轴向柱塞泵配流副承载性能、抗摩擦磨性能及容积效率,以某型斜盘式轴向柱塞泵配流盘为原型开展研究。首先,依据正交实验理论采用CFD方法研究椭圆开口偏置抛物线微织构(Elliptic opening offset parabola micro texture,EOOPT)形状参数对轴向柱塞泵配流副承载压强、摩擦因数的影响规律,并联合运用神经网络和遗传算法对EOOPT的形状参数进行优化设计。其次,运用响应面分析方法研究EOOPT分布参数对配流副承载压强、摩擦因数和泄漏量的影响规律,并对形状参数进行优化设计。最后对最优特征参数EOOPT织构化的柱塞泵配流副和未织构的相关性能进行对比分析,结果表明,前者的承载压强较后者提高11.23%,摩擦因数和泄漏量分别减低16.67%和2.96%。
为了提高轴向柱塞泵配流副承载性能、抗摩擦磨性能及容积效率,以某型斜盘式轴向柱塞泵配流盘为原型开展研究。首先,依据正交实验理论采用CFD方法研究椭圆开口偏置抛物线微织构(Elliptic opening offset parabola micro texture,EOOPT)形状参数对轴向柱塞泵配流副承载压强、摩擦因数的影响规律,并联合运用神经网络和遗传算法对EOOPT的形状参数进行优化设计。其次,运用响应面分析方法研究EOOPT分布参数对配流副承载压强、摩擦因数和泄漏量的影响规律,并对形状参数进行优化设计。最后对最优特征参数EOOPT织构化的柱塞泵配流副和未织构的相关性能进行对比分析,结果表明,前者的承载压强较后者提高11.23%,摩擦因数和泄漏量分别减低16.67%和2.96%。
2024,
43(7):
1199-1206. doi: 10.13433/j.cnki.1003-8728.20230029
摘要:
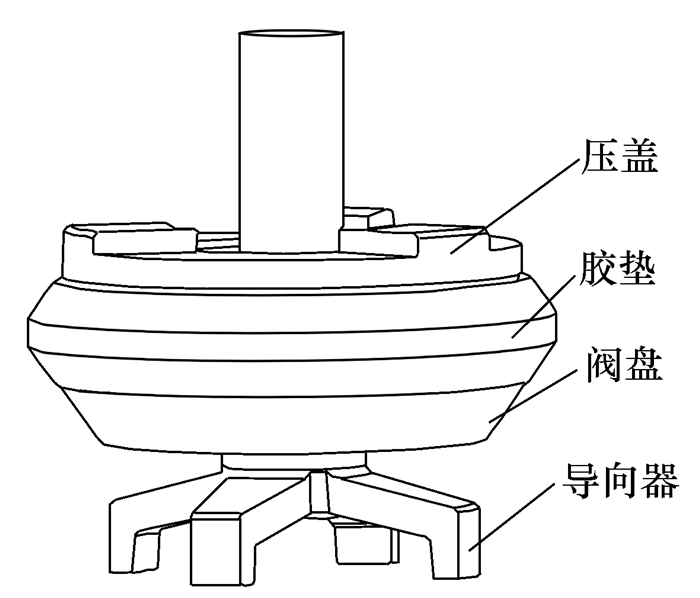
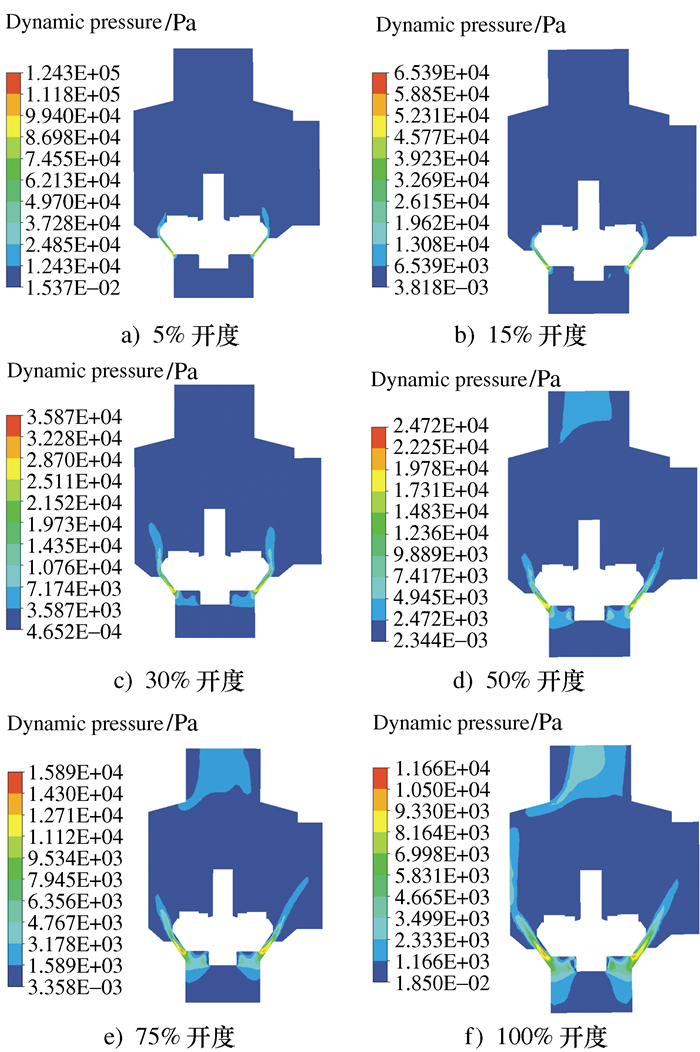
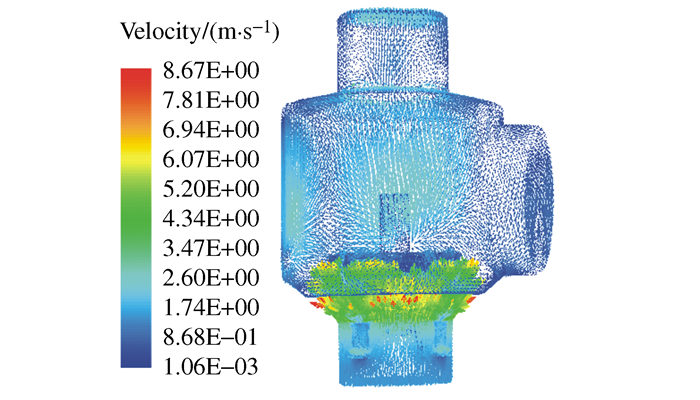
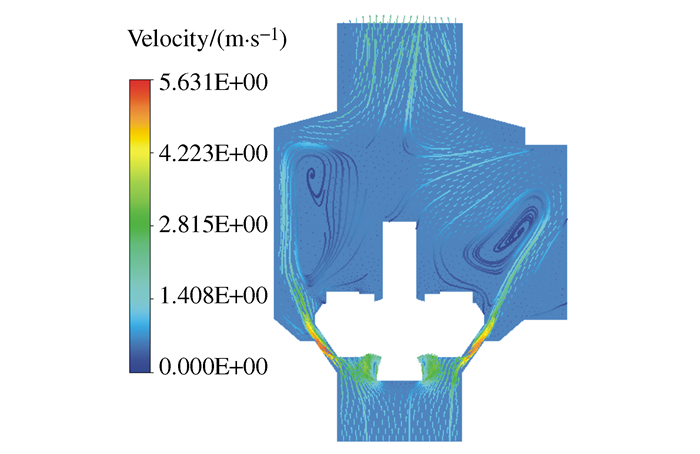
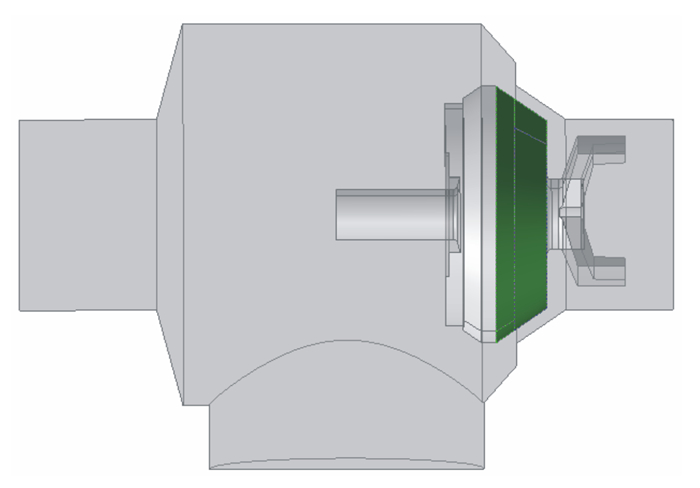
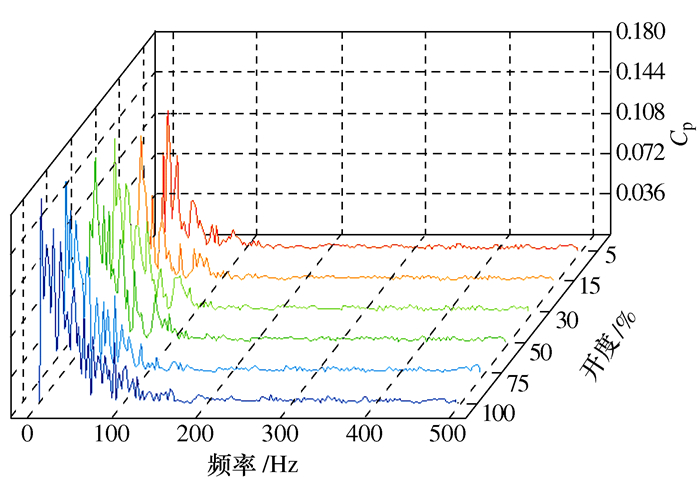
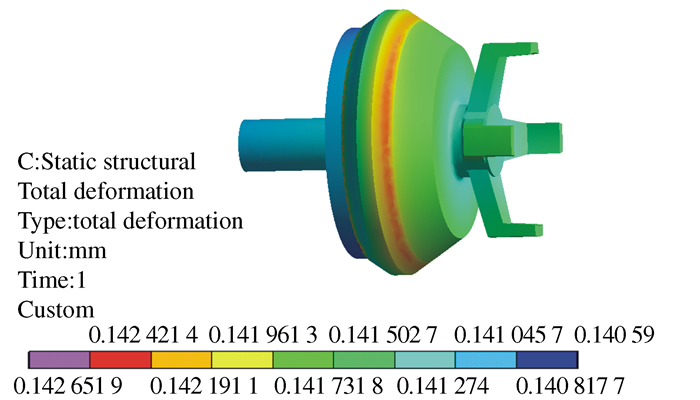
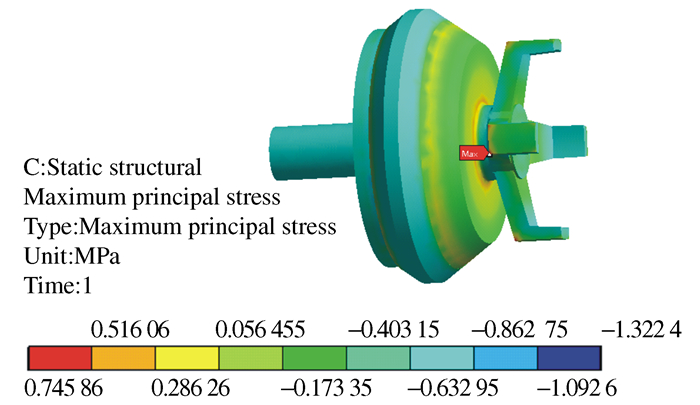
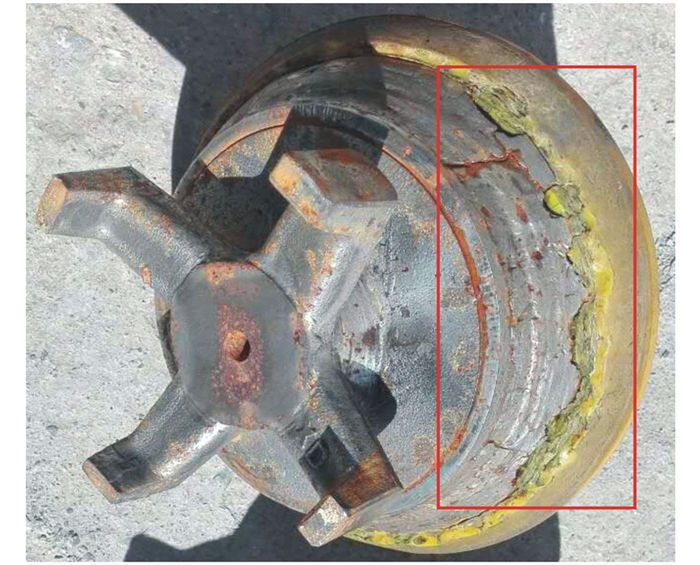
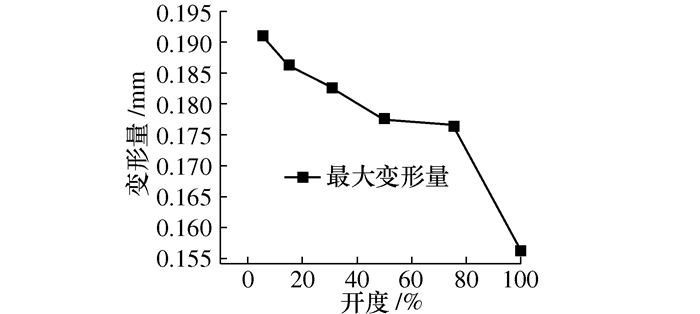
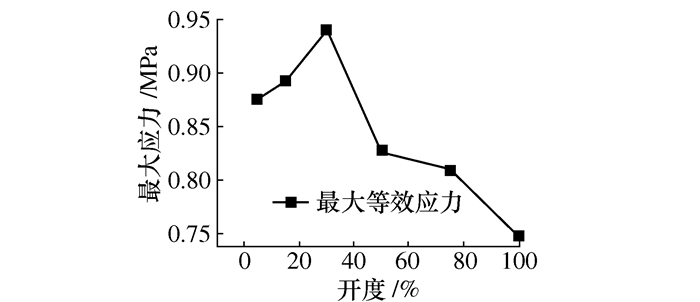
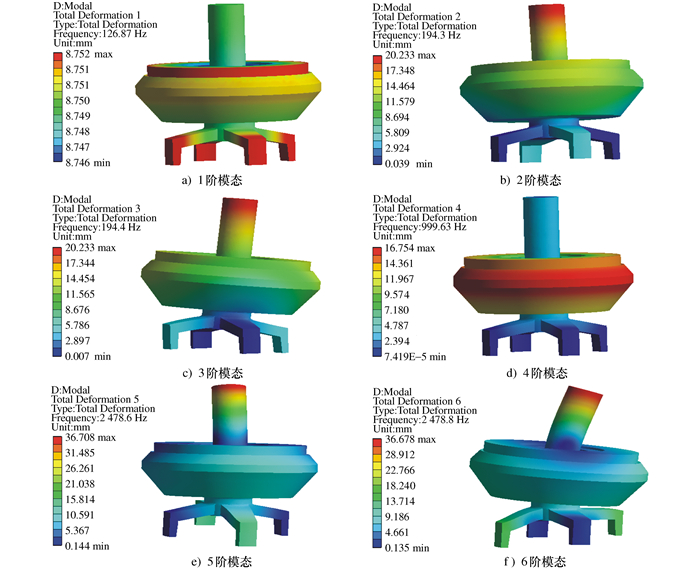
针对单向阀开启过程中强迫振动产生的根源和流激振动问题,构建了开度为5%、15%、30%、50%、75%和100%的流固耦合仿真模型,对不同开度情况下的流体与固体场特性以及流体施加于阀芯上的流激振力进行数值分析,得到了流场压力云图、速度矢量云图和流激振力脉动峰值频率以及阀芯在各开度下的模态振型和固有频率。结果表明:单向阀开启过程中,阀芯两侧存在较大的压差,变形区域主要集中于胶垫,阀腔内高速流体与低速流体接触时出现剪切形成涡流,流动涡流周期性变化产生的流激振力导致阀芯被迫振动,阀芯上的流激振力脉动峰值频率分布范围逐渐增加且波动更大。
针对单向阀开启过程中强迫振动产生的根源和流激振动问题,构建了开度为5%、15%、30%、50%、75%和100%的流固耦合仿真模型,对不同开度情况下的流体与固体场特性以及流体施加于阀芯上的流激振力进行数值分析,得到了流场压力云图、速度矢量云图和流激振力脉动峰值频率以及阀芯在各开度下的模态振型和固有频率。结果表明:单向阀开启过程中,阀芯两侧存在较大的压差,变形区域主要集中于胶垫,阀腔内高速流体与低速流体接触时出现剪切形成涡流,流动涡流周期性变化产生的流激振力导致阀芯被迫振动,阀芯上的流激振力脉动峰值频率分布范围逐渐增加且波动更大。
2024,
43(7):
1207-1213. doi: 10.13433/j.cnki.1003-8728.20240005
摘要:
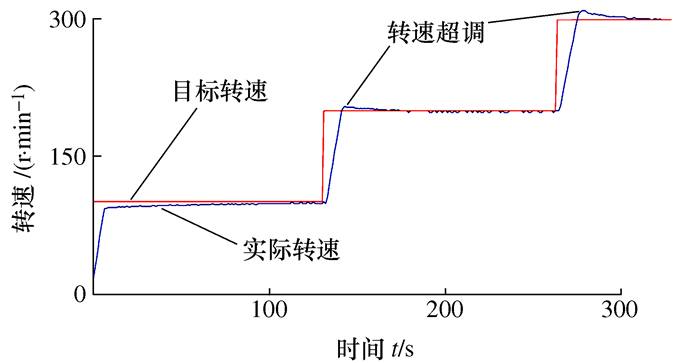
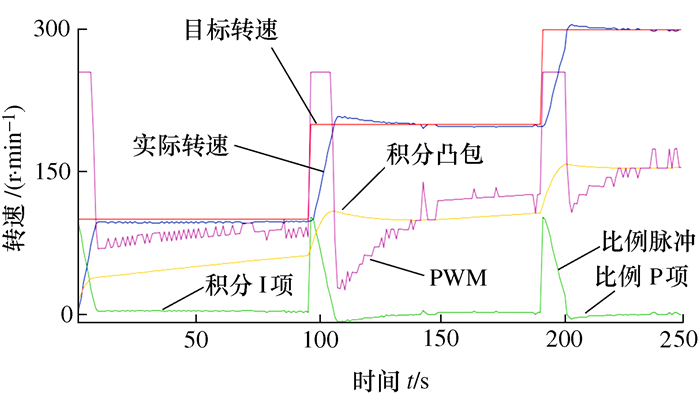
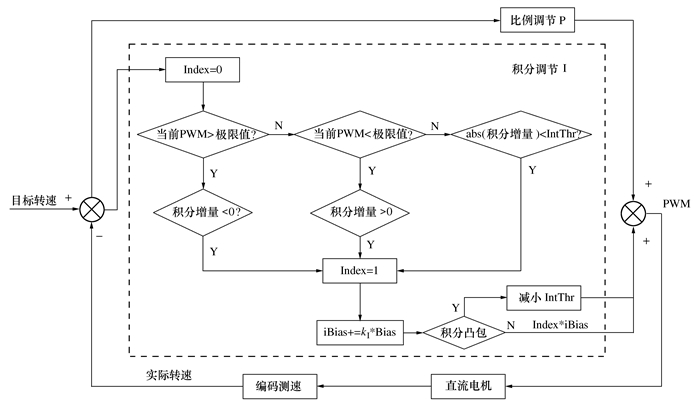
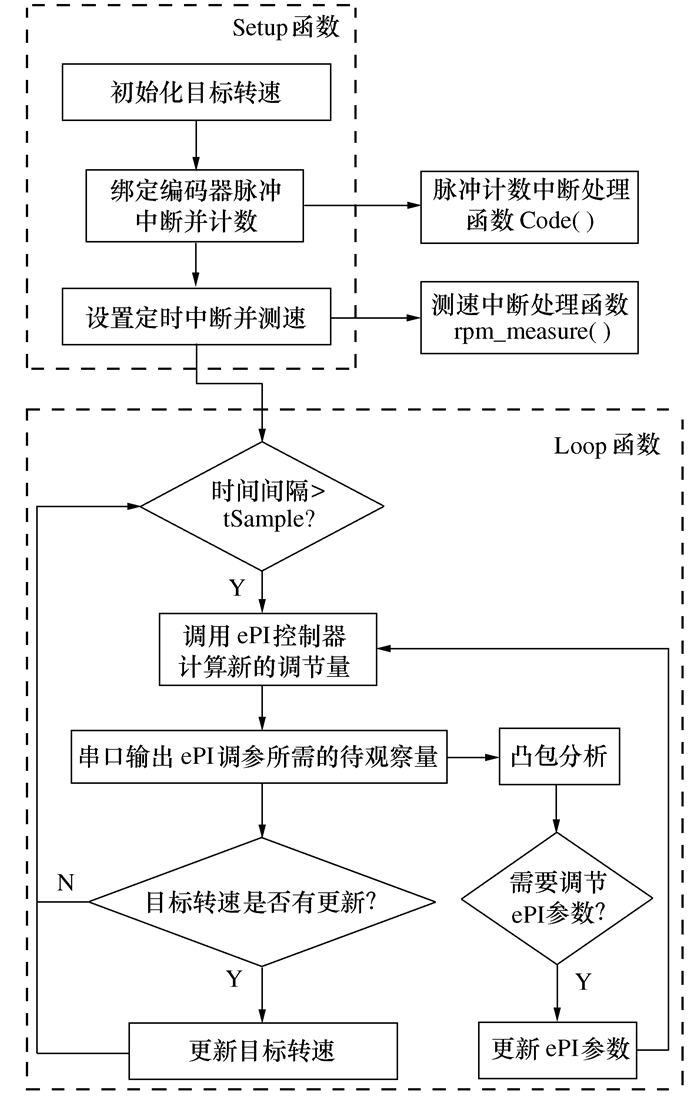
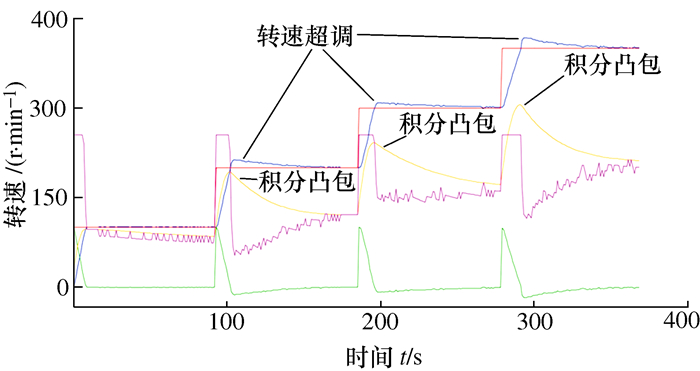
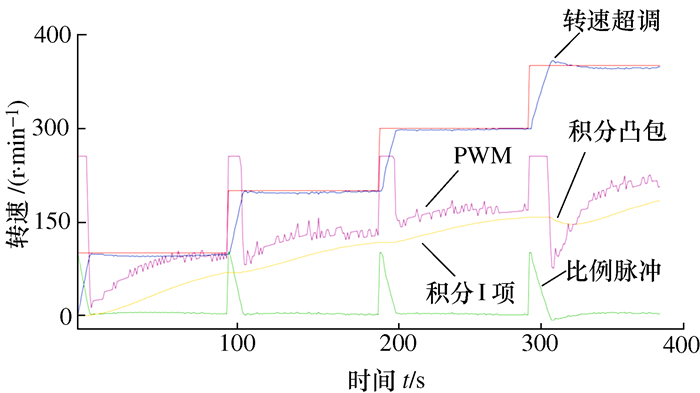
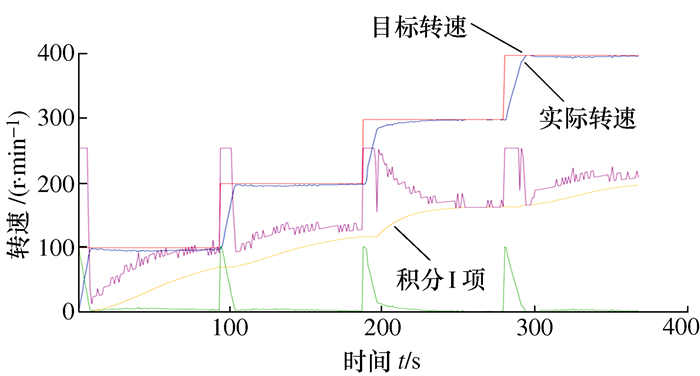
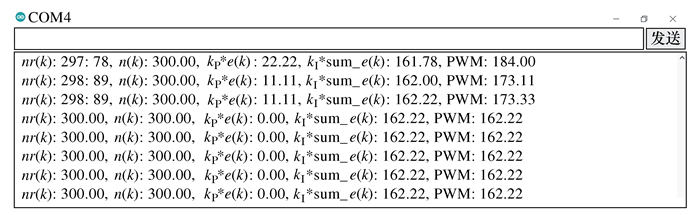
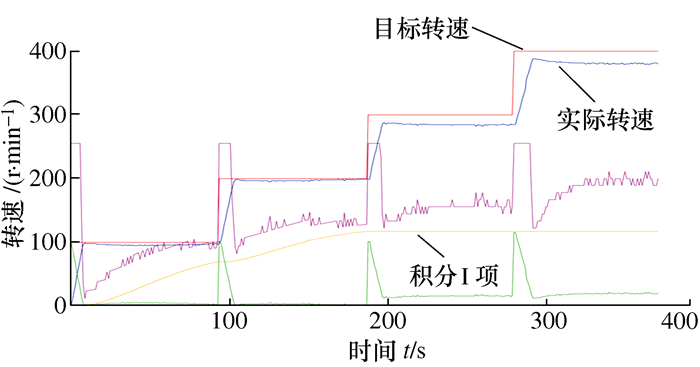
针对电机PI控制器参数整定过程中容易出现的转速超调问题, 提出了积分凸包概念、积分凸包分析方法。在此基础上, 设计了基于积分凸包抑制的防超调增强型PI(enhaced PI, ePI)控制器。在PI控制参数基础上, 设计新增了积分阈值参数, 该参数控制积分项的累积, 并加入到驱动电机的PWM值的计算公式中。通过可视化消除积分凸包, 快速调试出防止转速超调的包括比例、积分及积分阈值参数的ePI控制器参数。基于Arduino及proteus, 构建了仿真平台。通过实验, 对比了PI控制器与基于积分凸包抑制的ePI控制器防超调仿真结果。实验结果表明: ePI控制器对超调控制有效, 且超调率随积分阈值减小而减小。
针对电机PI控制器参数整定过程中容易出现的转速超调问题, 提出了积分凸包概念、积分凸包分析方法。在此基础上, 设计了基于积分凸包抑制的防超调增强型PI(enhaced PI, ePI)控制器。在PI控制参数基础上, 设计新增了积分阈值参数, 该参数控制积分项的累积, 并加入到驱动电机的PWM值的计算公式中。通过可视化消除积分凸包, 快速调试出防止转速超调的包括比例、积分及积分阈值参数的ePI控制器参数。基于Arduino及proteus, 构建了仿真平台。通过实验, 对比了PI控制器与基于积分凸包抑制的ePI控制器防超调仿真结果。实验结果表明: ePI控制器对超调控制有效, 且超调率随积分阈值减小而减小。

2024,
43(7):
1214-1221. doi: 10.13433/j.cnki.1003-8728.20230047
摘要:
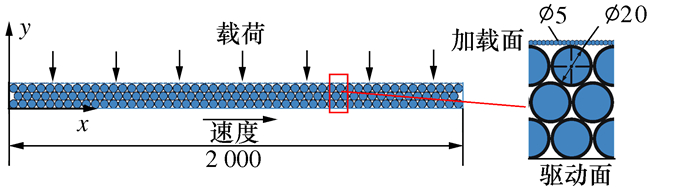
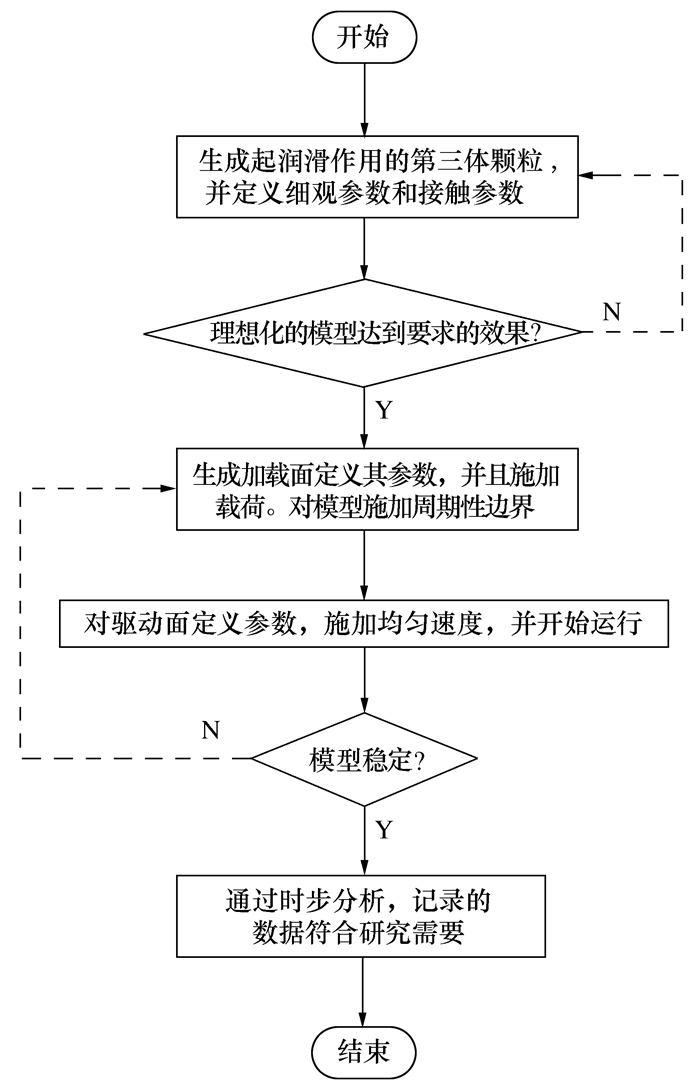
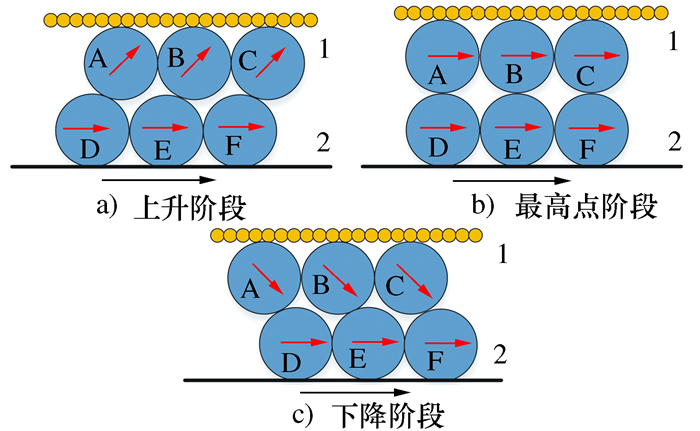
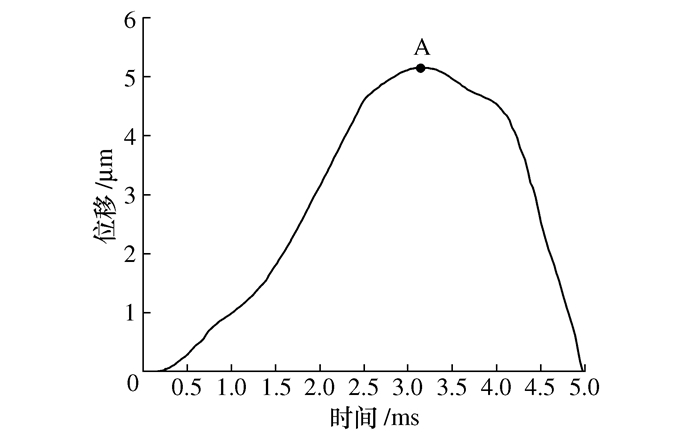
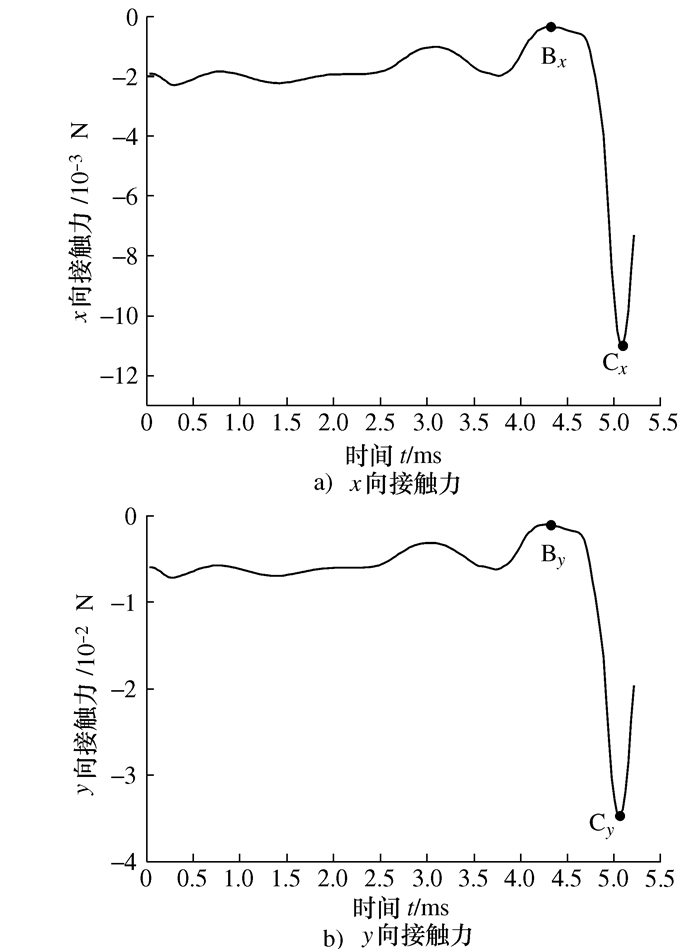
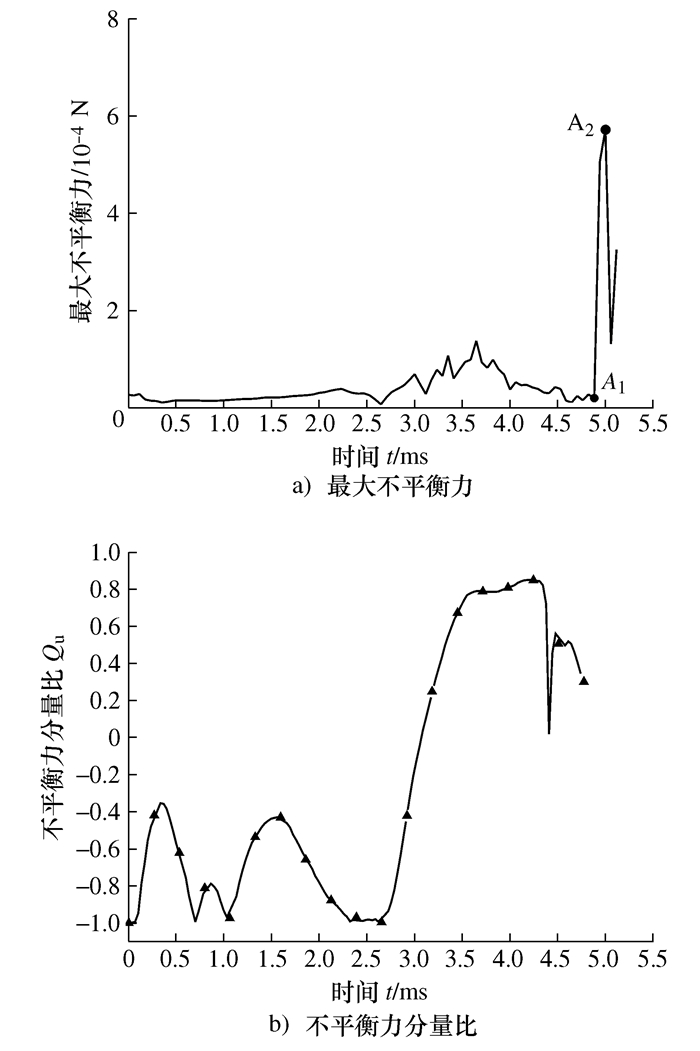
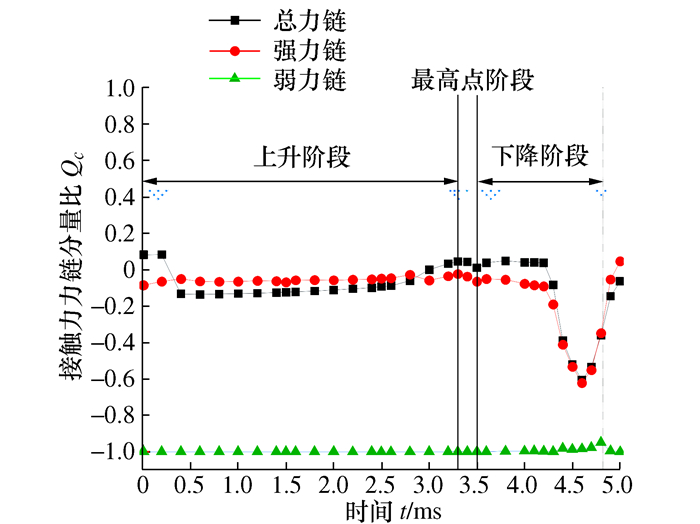
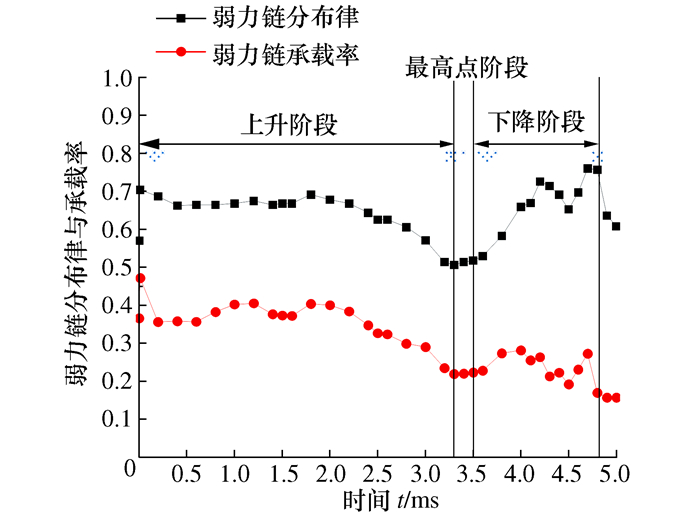
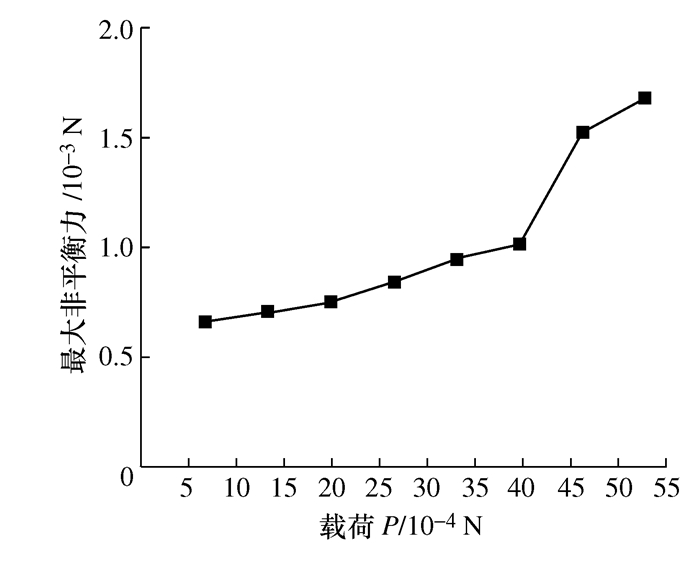
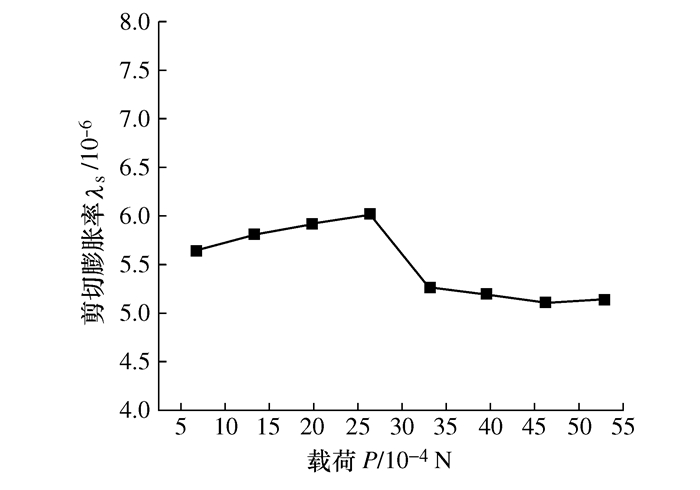
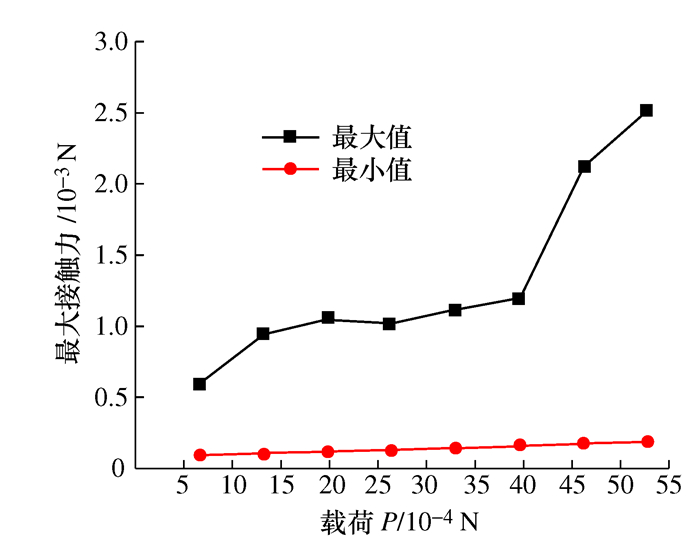
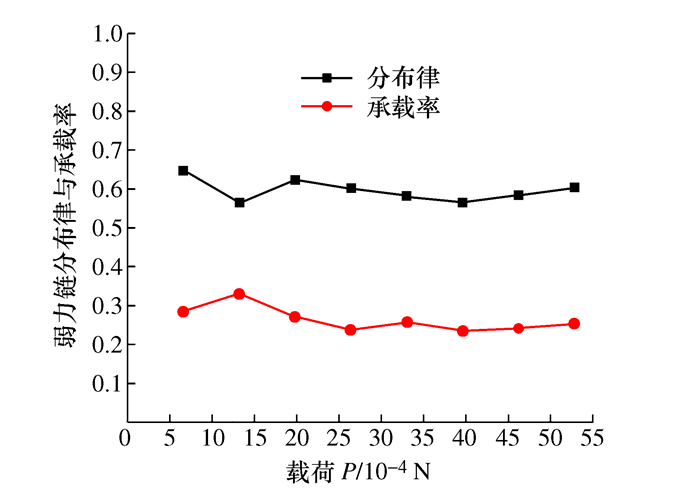
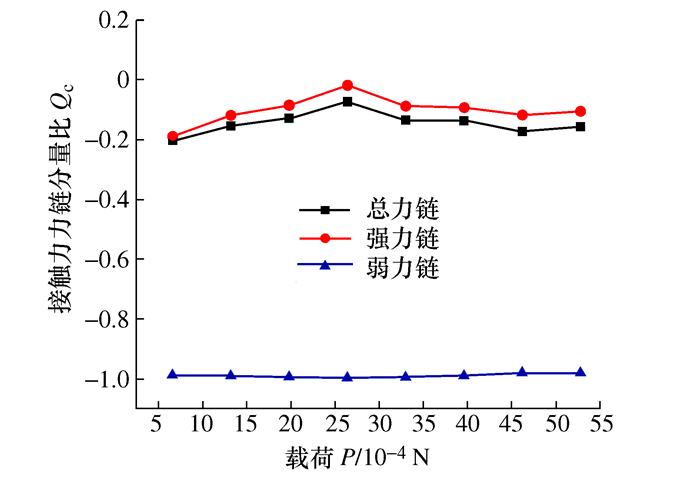
将研磨抛光作为后处理可以提高工件的表面质量, 如何将研磨抛光工艺价值最大化是本文首要解决的问题。由于颗粒流润滑既适用于极端环境又具有环保作用, 因此本文将颗粒流用于研磨抛光。通过离散单元法建立平行板结构模型, 将颗粒流作为第三体填充至摩擦副间隙, 将工件表面与刀具作为第一体对颗粒流体系施加法向力和剪切力, 对研磨抛光过程进行数值模拟。研究结果表明: 单个颗粒剪切膨胀过程可以分为上升阶段、最高点阶段和下降阶段, 不同阶段的弱力链方向都偏向于x轴, 其中上升阶段强弱力链方向稳定, 可提高工件的加工效率以及表面质量。当载荷的较大, 会使强弱力链的分布律与承载率稳定, 当载荷较大及较小时, 剪切膨胀率降低, 强力链方向更偏向于x轴。通过本研究, 可以将不易检测的力链和剪切膨胀现象进行数值模拟, 为研磨抛光条件下使用颗粒流提供了理论基础。
将研磨抛光作为后处理可以提高工件的表面质量, 如何将研磨抛光工艺价值最大化是本文首要解决的问题。由于颗粒流润滑既适用于极端环境又具有环保作用, 因此本文将颗粒流用于研磨抛光。通过离散单元法建立平行板结构模型, 将颗粒流作为第三体填充至摩擦副间隙, 将工件表面与刀具作为第一体对颗粒流体系施加法向力和剪切力, 对研磨抛光过程进行数值模拟。研究结果表明: 单个颗粒剪切膨胀过程可以分为上升阶段、最高点阶段和下降阶段, 不同阶段的弱力链方向都偏向于x轴, 其中上升阶段强弱力链方向稳定, 可提高工件的加工效率以及表面质量。当载荷的较大, 会使强弱力链的分布律与承载率稳定, 当载荷较大及较小时, 剪切膨胀率降低, 强力链方向更偏向于x轴。通过本研究, 可以将不易检测的力链和剪切膨胀现象进行数值模拟, 为研磨抛光条件下使用颗粒流提供了理论基础。
2024,
43(7):
1222-1229. doi: 10.13433/j.cnki.1003-8728.20230021
摘要:
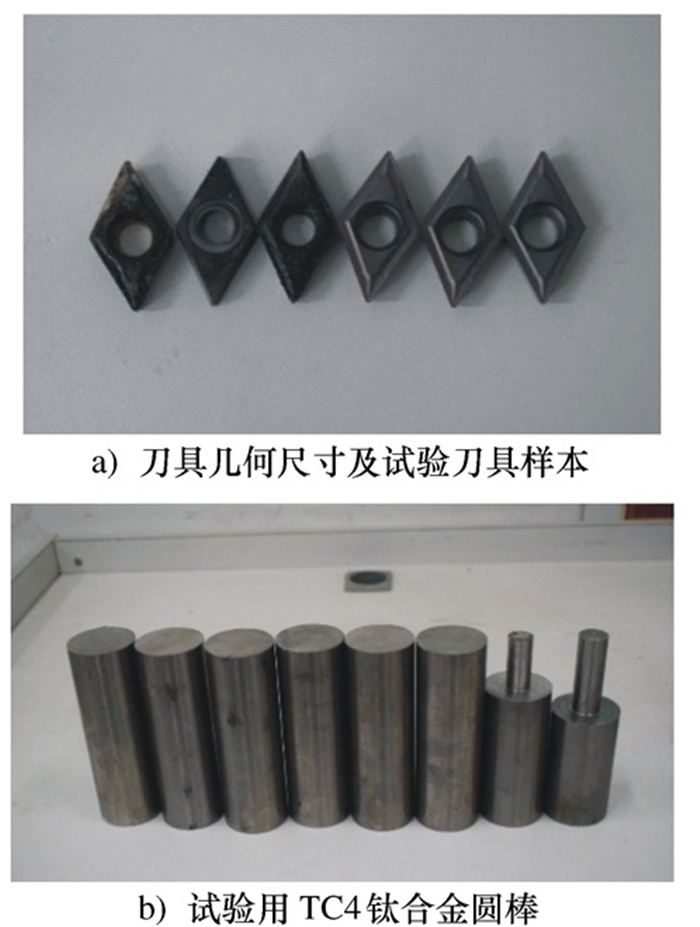
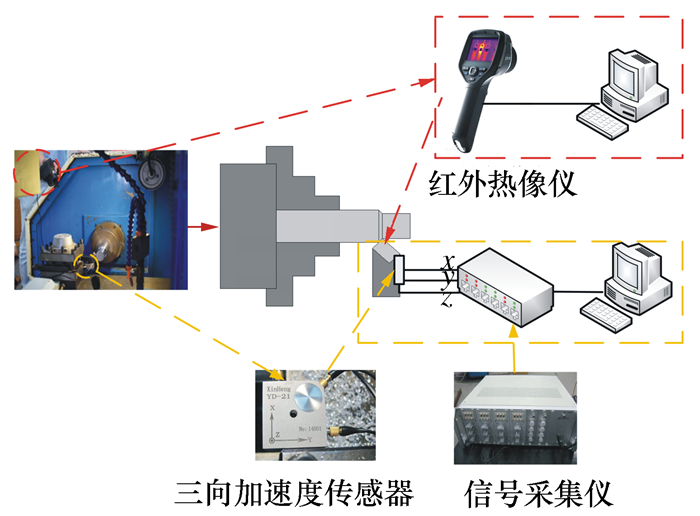
钛合金作为"21世纪战略金属"在航空领域应用广泛, 其加工质量至关重要。因此, 对钛合金进行切削加工优化具有重要的研究意义。本文搭建切削温度和切削振动同步测量系统。通过红外热像仪和三向加速度传感器采集车刀尖端附近的温度和振动信号。建立基于切削温度和切削振动多特征融合优化模型, 并运用粒子群优化灰狼算法对多特征融合优化模型进行求解, 获得最优的切削参数。研究表明: 在试验设计的切削参数范围内, 切削参数的最优解为: 切削速度753.98 m/s, 进给速度30 mm/min, 切削深度0.4 mm, 所做研究为优化钛合金加工质量提供理论指导。
钛合金作为"21世纪战略金属"在航空领域应用广泛, 其加工质量至关重要。因此, 对钛合金进行切削加工优化具有重要的研究意义。本文搭建切削温度和切削振动同步测量系统。通过红外热像仪和三向加速度传感器采集车刀尖端附近的温度和振动信号。建立基于切削温度和切削振动多特征融合优化模型, 并运用粒子群优化灰狼算法对多特征融合优化模型进行求解, 获得最优的切削参数。研究表明: 在试验设计的切削参数范围内, 切削参数的最优解为: 切削速度753.98 m/s, 进给速度30 mm/min, 切削深度0.4 mm, 所做研究为优化钛合金加工质量提供理论指导。

2024,
43(7):
1230-1237. doi: 10.13433/j.cnki.1003-8728.20230027
摘要:
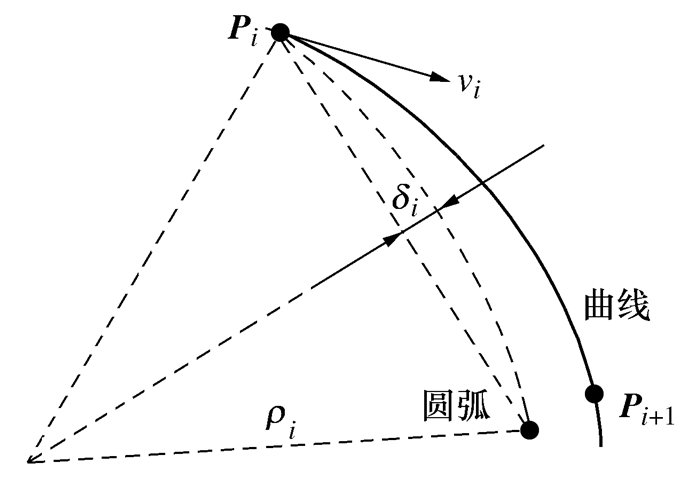
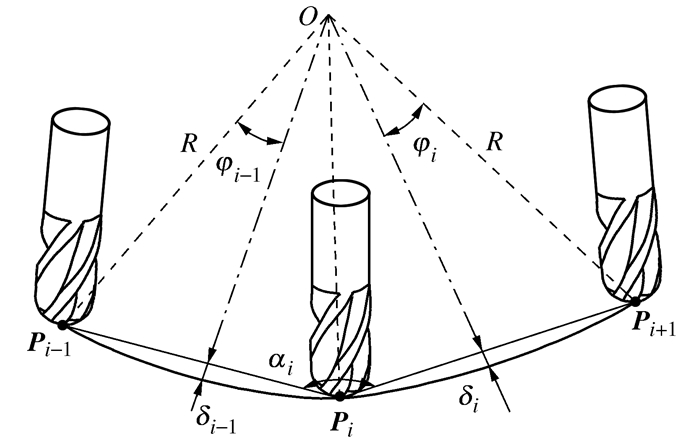
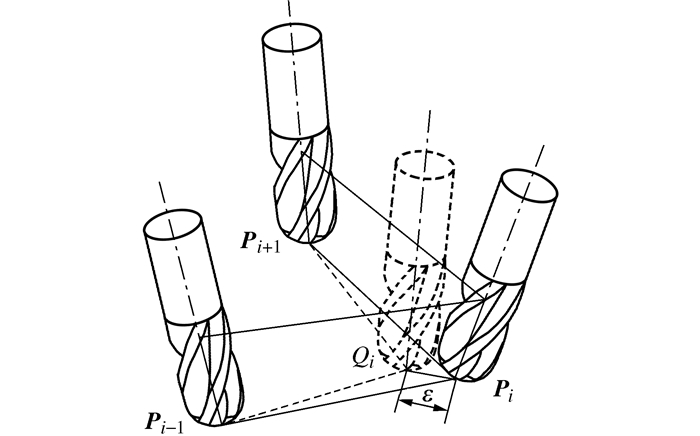
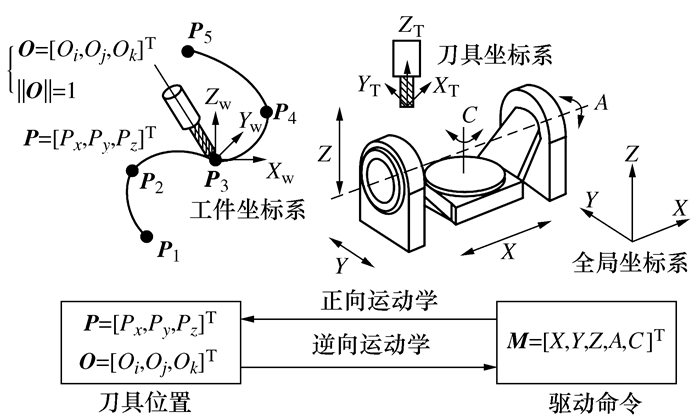
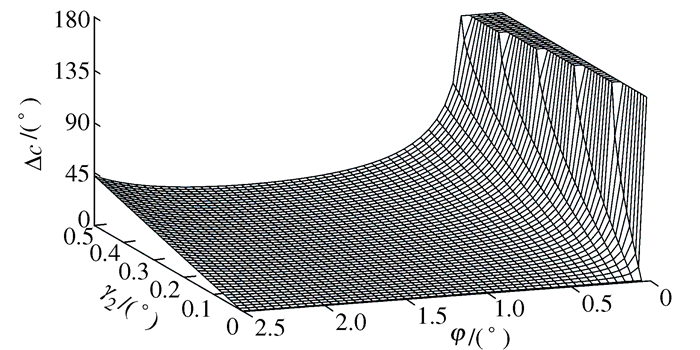
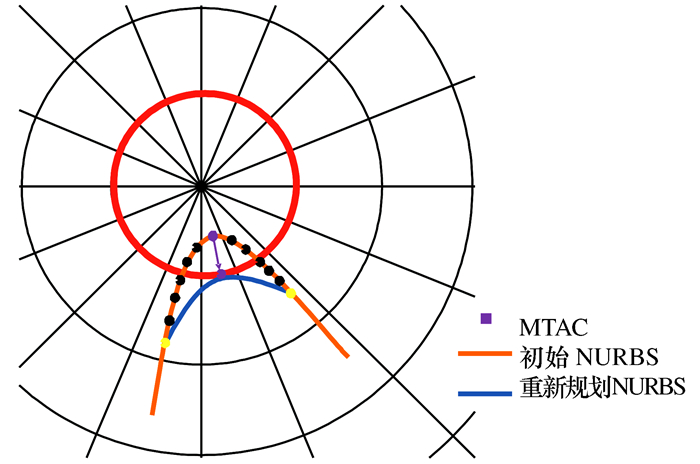
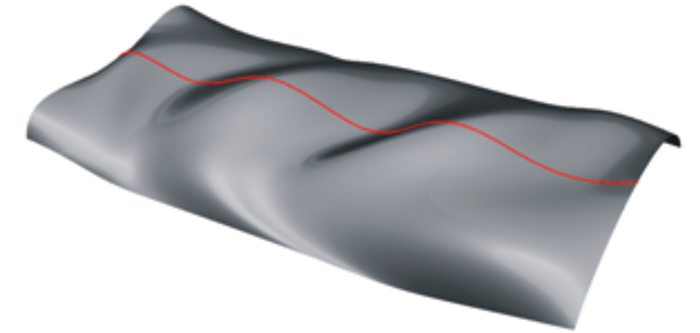
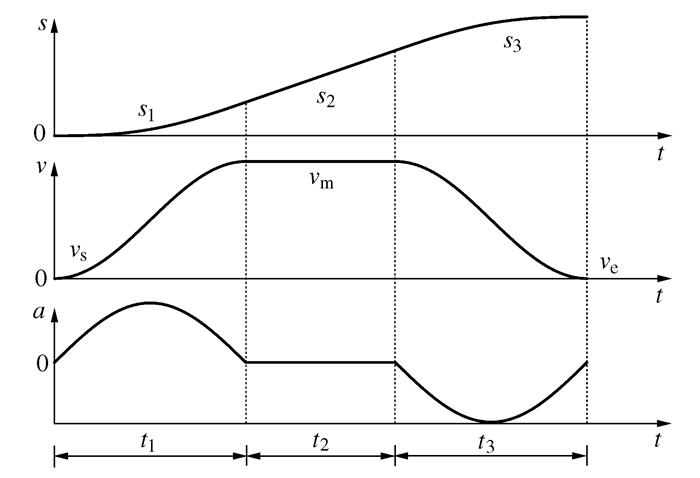
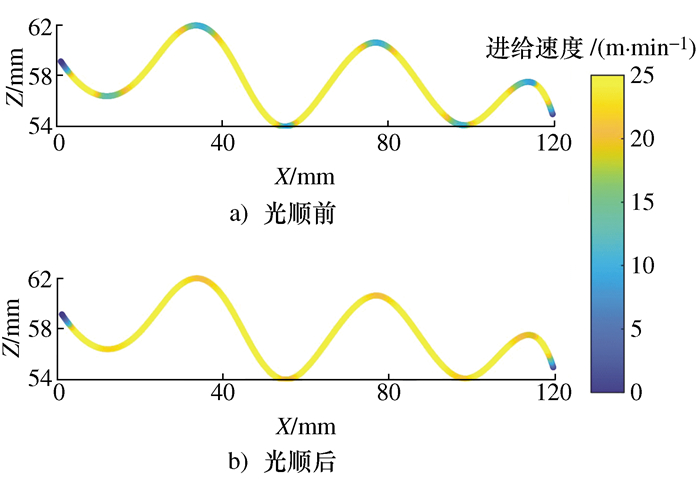
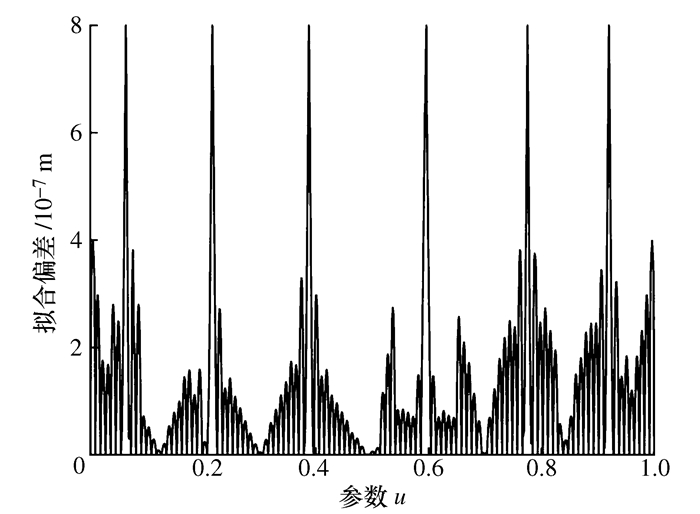
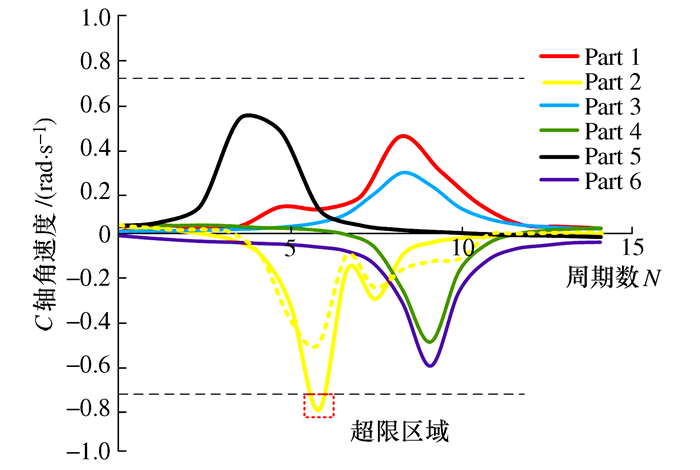
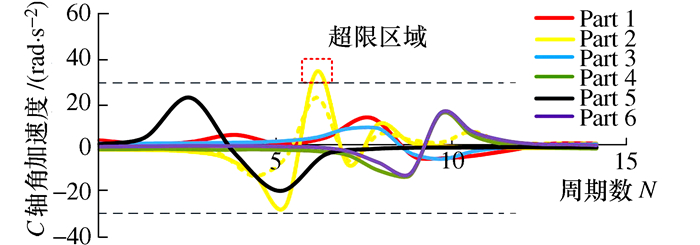
针对现行五轴加工中存在的路径拐角处平动轴减速过度, 奇异区域旋转轴角度变化剧烈的问题, 以AC双转台五轴机床为研究对象, 提出一种满足机床运动学约束的路径优化方法。该方法首先以刀心点光顺前后最大许用偏移量作为约束, 利用转角向量和双弦弓高进行建模, 寻求微小线段拐角处局部能量最优解。并对奇异范围内部和边缘的刀轴矢量点二次规划, 使得矢量末端刚好绕过单位球面上的奇异区域, 极大地保留原有加工特性。通过结合三角函数加减速控制算法, 对优化效果进行评估。仿真结果表明: 该路径优化方法在拟合偏差与弓高误差均没有超过许用值的同时, 平均进给速度提升了10.64%, 而且能有效避免加工中奇异现象的发生。可见本文所提出的方法在提高五轴加工效率和加工质量等方面具有较高的理论意义和实际应用价值。
针对现行五轴加工中存在的路径拐角处平动轴减速过度, 奇异区域旋转轴角度变化剧烈的问题, 以AC双转台五轴机床为研究对象, 提出一种满足机床运动学约束的路径优化方法。该方法首先以刀心点光顺前后最大许用偏移量作为约束, 利用转角向量和双弦弓高进行建模, 寻求微小线段拐角处局部能量最优解。并对奇异范围内部和边缘的刀轴矢量点二次规划, 使得矢量末端刚好绕过单位球面上的奇异区域, 极大地保留原有加工特性。通过结合三角函数加减速控制算法, 对优化效果进行评估。仿真结果表明: 该路径优化方法在拟合偏差与弓高误差均没有超过许用值的同时, 平均进给速度提升了10.64%, 而且能有效避免加工中奇异现象的发生。可见本文所提出的方法在提高五轴加工效率和加工质量等方面具有较高的理论意义和实际应用价值。
2024,
43(7):
1238-1243. doi: 10.13433/j.cnki.1003-8728.20230008
摘要:
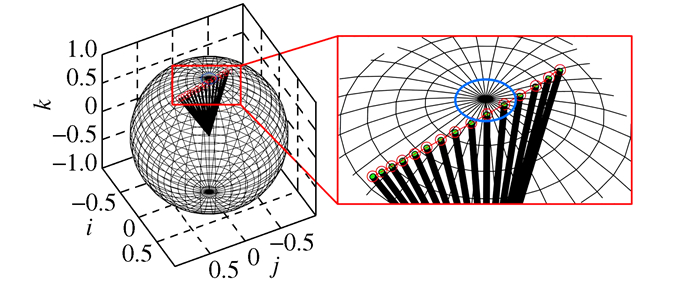
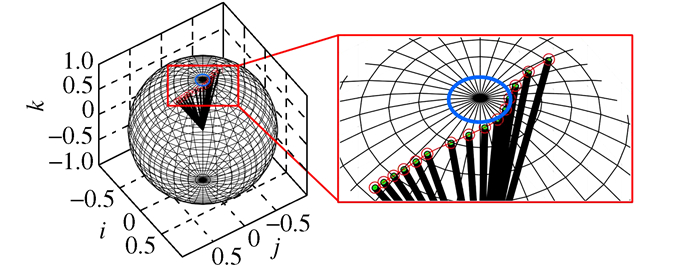
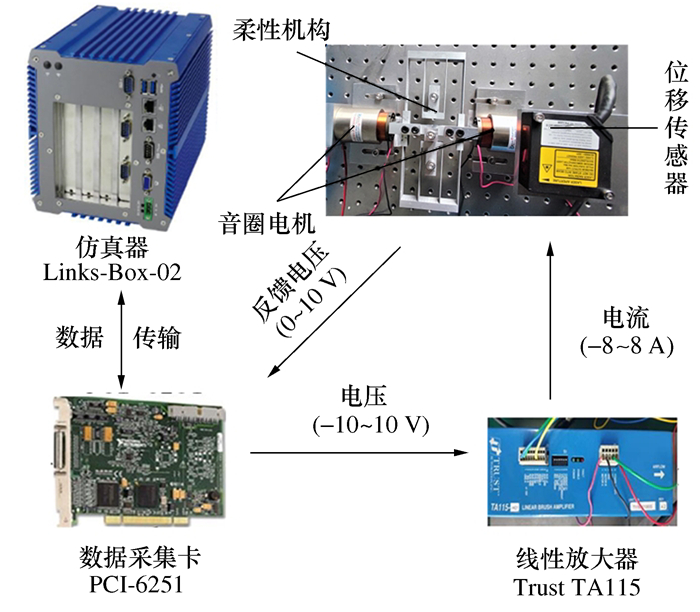
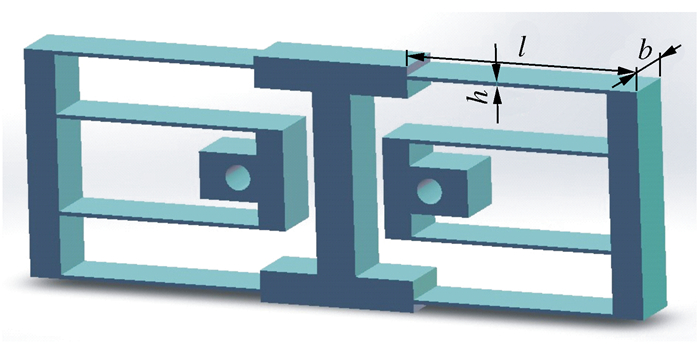
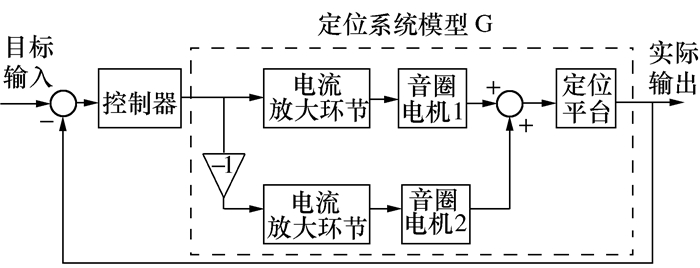
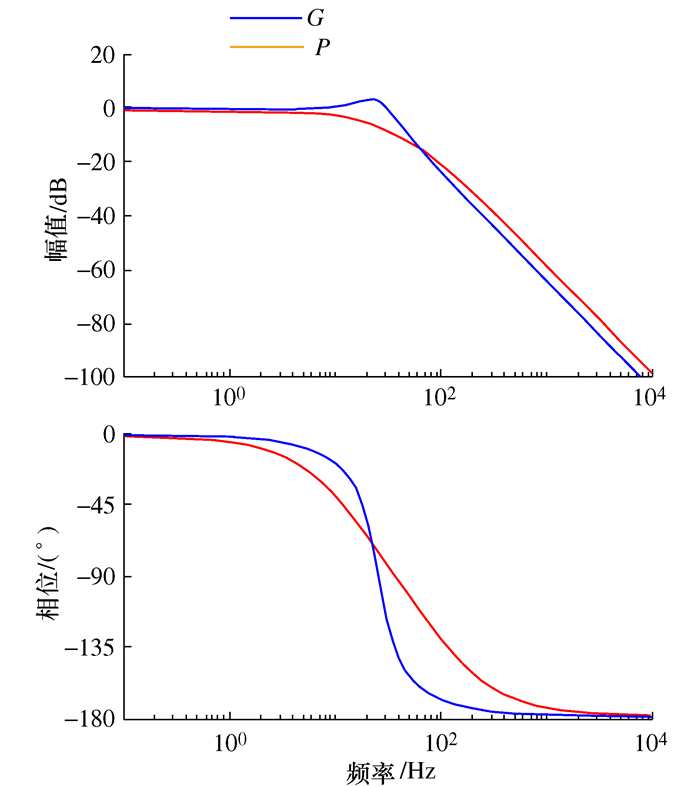
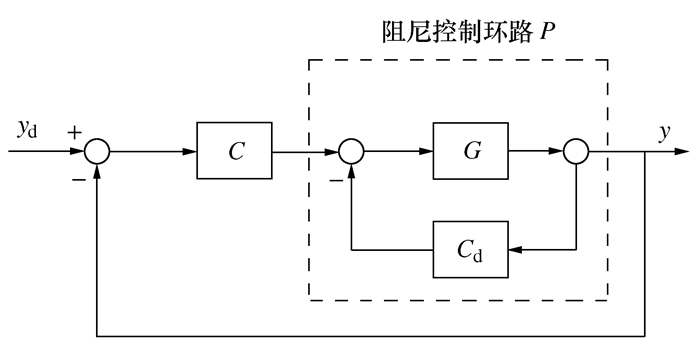
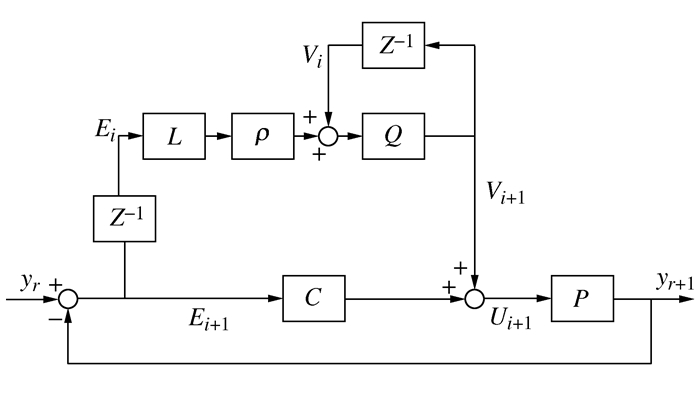
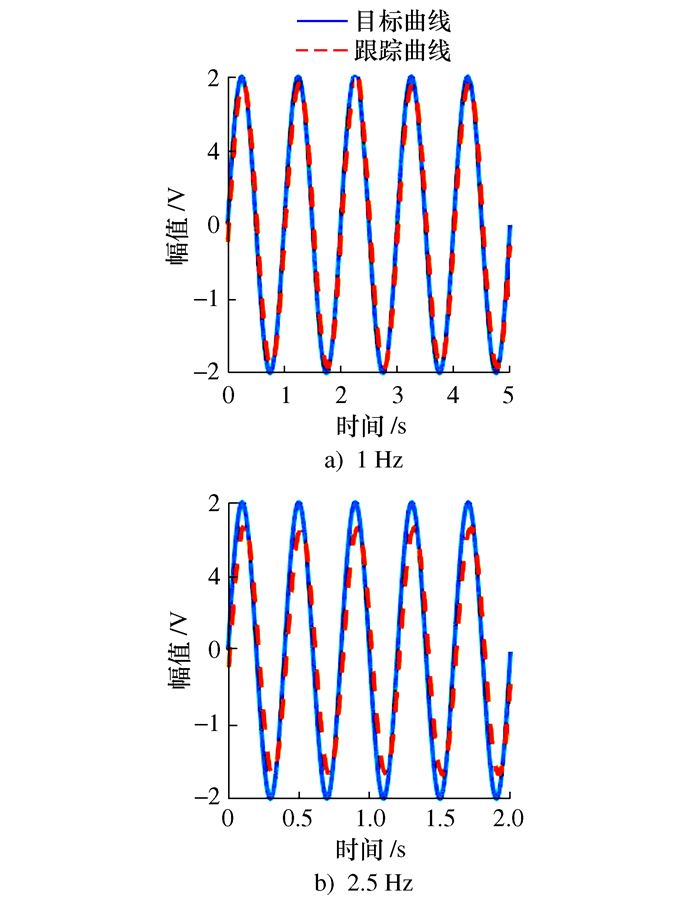
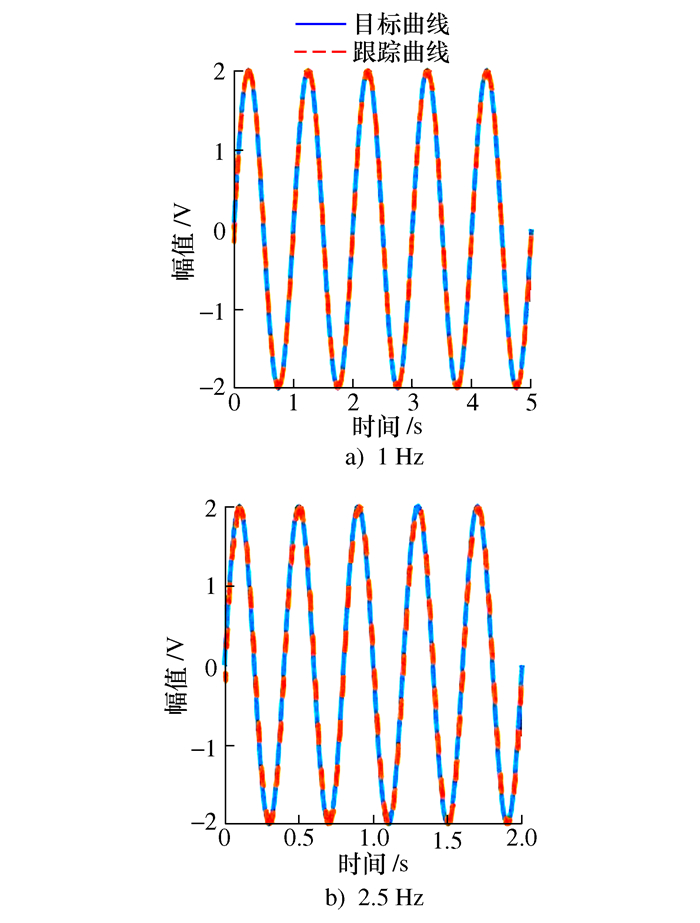
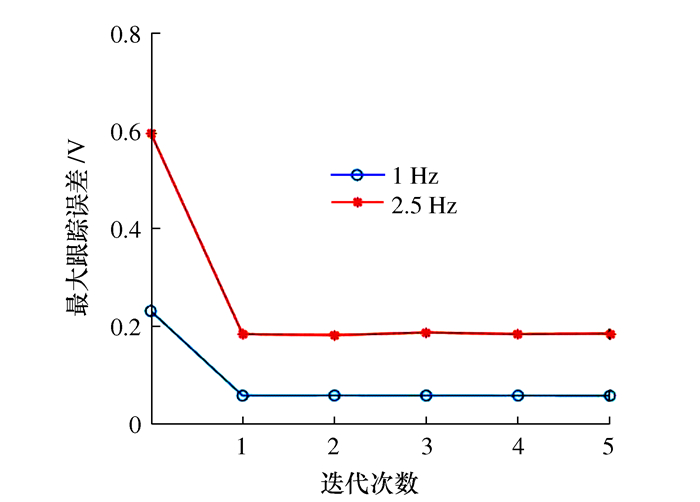
为了解决音圈电机驱动柔性微定位平台驱动力小和低阻尼谐振等问题, 本文采用两侧音圈电机的推拉模式来提升驱动力的大小, 并且利用内环阻尼控制器结合迭代学习控制方法来实现平台的精准控制。首先, 搭建了互补配置的双音圈电机驱动双平行四边形柔性机构的微定位平台。其次, 设计了内环阻尼速度反馈控制器。然后, 采用逆模型迭代学习控制方法来进一步消除周期性的干扰和误差。最后进行了跟踪实验。结果表明: 在跟踪1 Hz和2.5 Hz的正弦波时, 相比于PI控制, 最大误差分别减少74.6%和68.6%, 满足微定位平台精准控制的要求。
为了解决音圈电机驱动柔性微定位平台驱动力小和低阻尼谐振等问题, 本文采用两侧音圈电机的推拉模式来提升驱动力的大小, 并且利用内环阻尼控制器结合迭代学习控制方法来实现平台的精准控制。首先, 搭建了互补配置的双音圈电机驱动双平行四边形柔性机构的微定位平台。其次, 设计了内环阻尼速度反馈控制器。然后, 采用逆模型迭代学习控制方法来进一步消除周期性的干扰和误差。最后进行了跟踪实验。结果表明: 在跟踪1 Hz和2.5 Hz的正弦波时, 相比于PI控制, 最大误差分别减少74.6%和68.6%, 满足微定位平台精准控制的要求。
2024,
43(7):
1244-1248. doi: 10.13433/j.cnki.1003-8728.20230028
摘要:
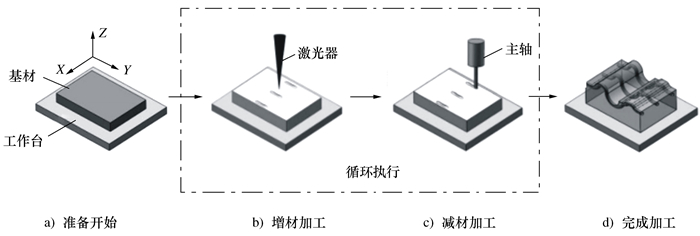
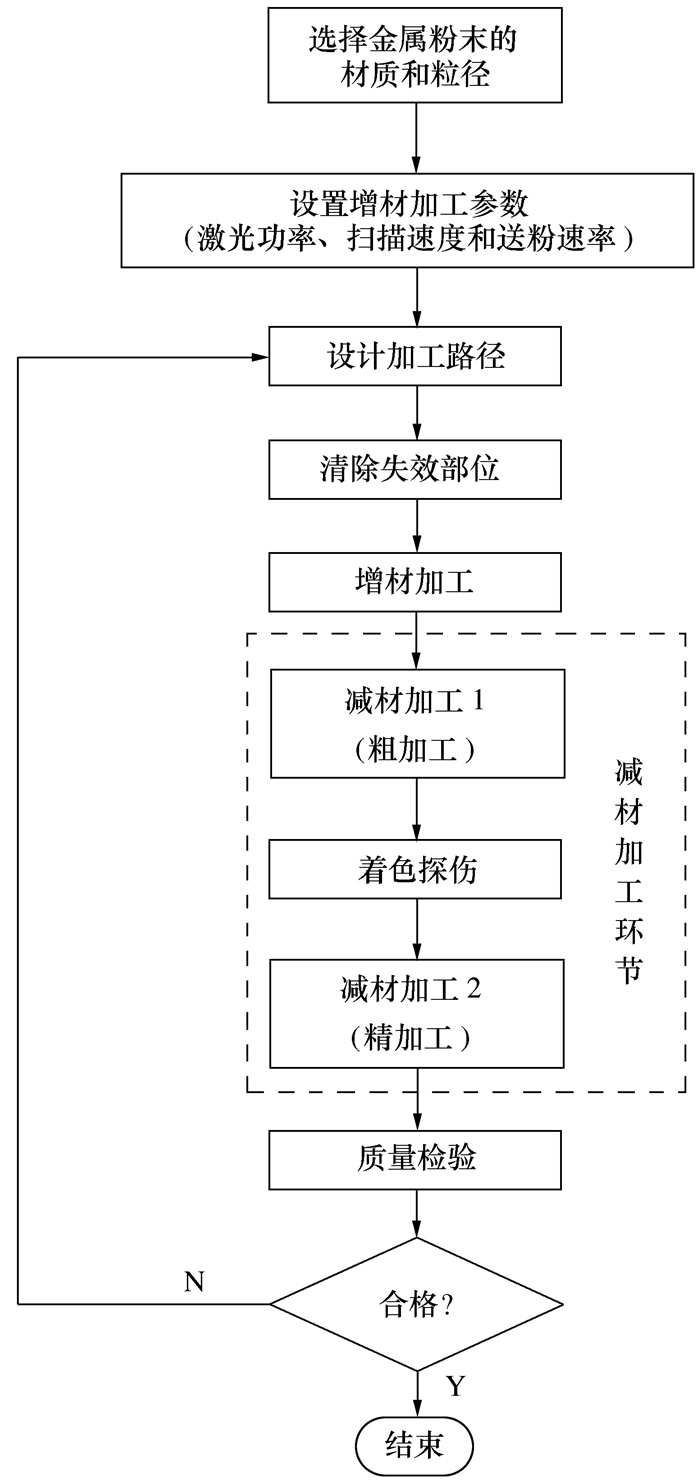
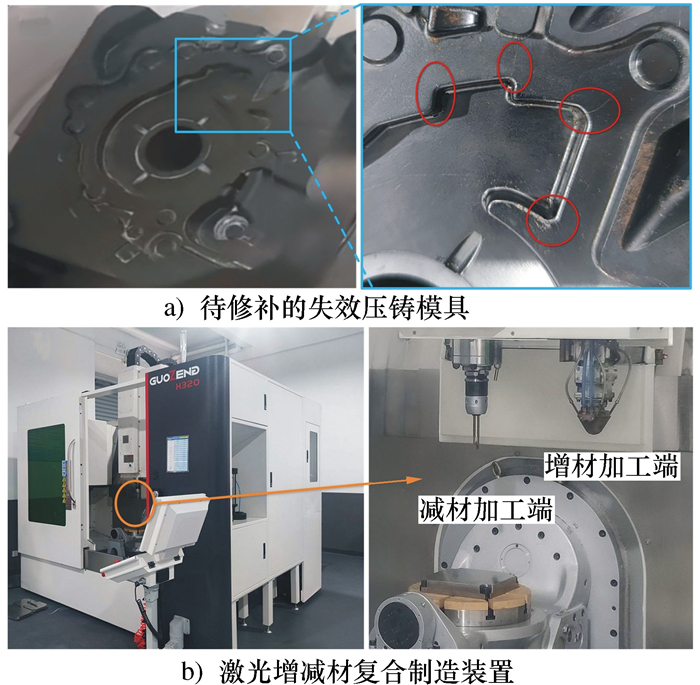
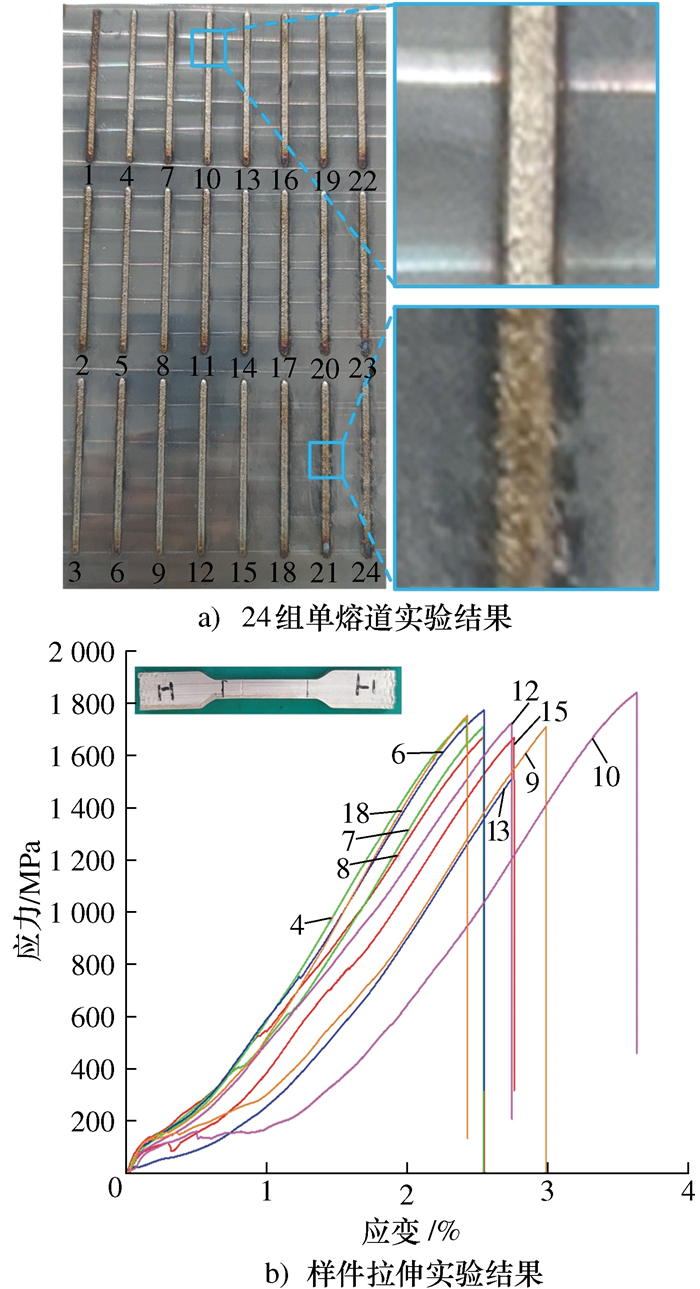
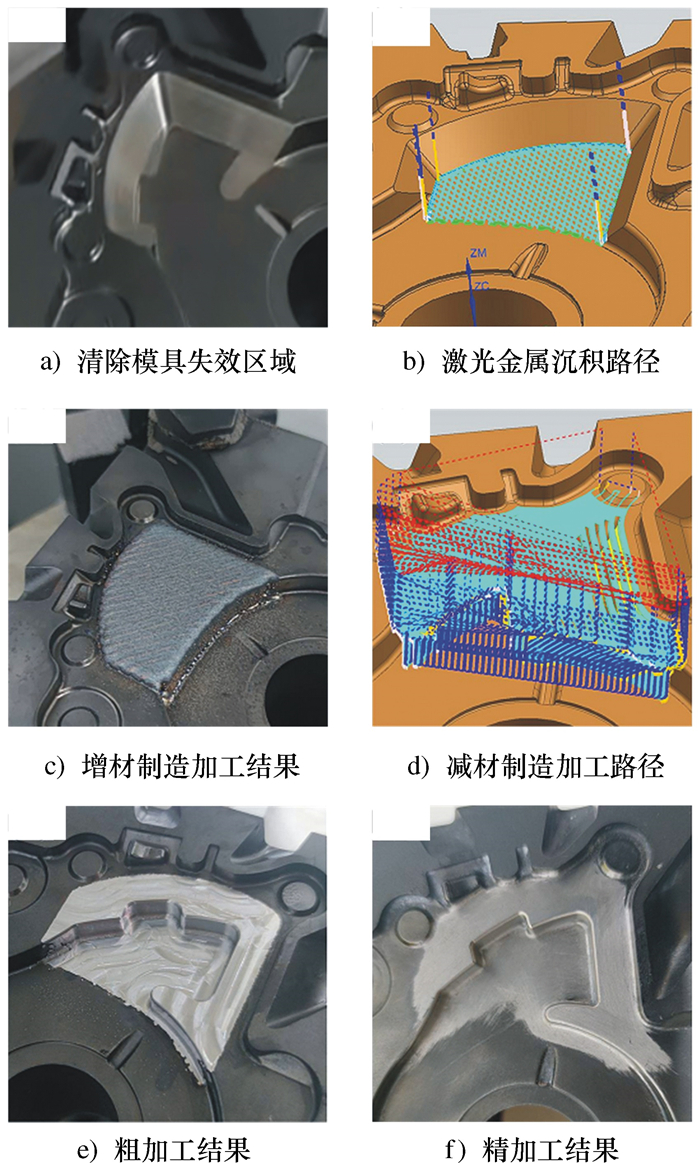
激光金属沉积增减材复合制造技术是实现模具等高附加值部件修复与再制造的理想候选工艺之一。为了提高模具修复的效率和精度,本文将增减材复合制造技术应用于模具修复领域,并且对修复工艺进行研究。首先根据具体使用工况和材料性能要求,确定了最佳模具修复参数,随后讨论了该模具修复工艺的应用条件和应用范围。实验结果表明: 利用本文提出工艺方案进行模具修复时可以实现修复区域无拼接痕迹,并且修复区域硬度提升7.4 HRC,能够有效提升模具的使用性能。
激光金属沉积增减材复合制造技术是实现模具等高附加值部件修复与再制造的理想候选工艺之一。为了提高模具修复的效率和精度,本文将增减材复合制造技术应用于模具修复领域,并且对修复工艺进行研究。首先根据具体使用工况和材料性能要求,确定了最佳模具修复参数,随后讨论了该模具修复工艺的应用条件和应用范围。实验结果表明: 利用本文提出工艺方案进行模具修复时可以实现修复区域无拼接痕迹,并且修复区域硬度提升7.4 HRC,能够有效提升模具的使用性能。
2024,
43(7):
1249-1256. doi: 10.13433/j.cnki.1003-8728.20230012
摘要:
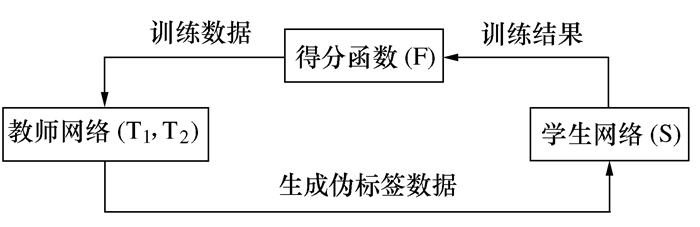
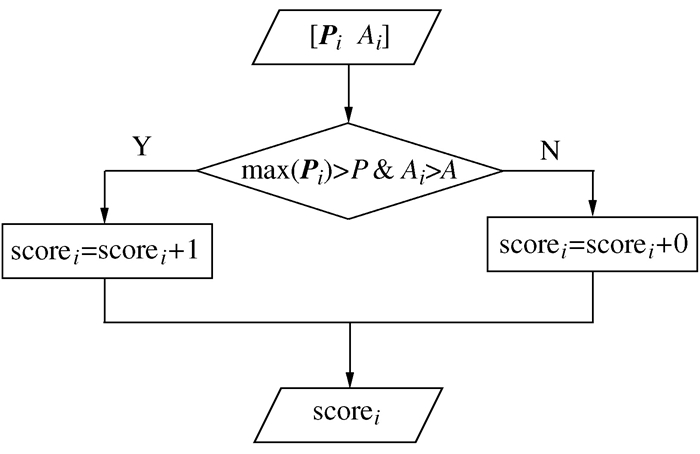
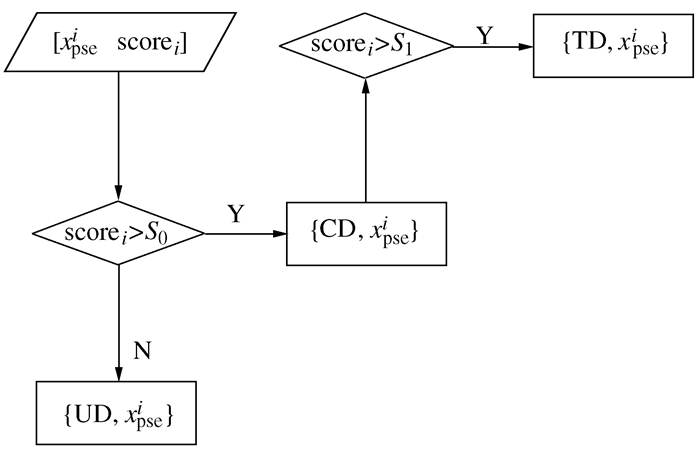
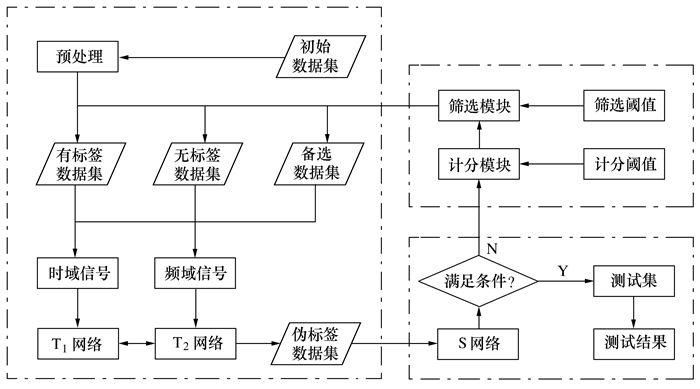
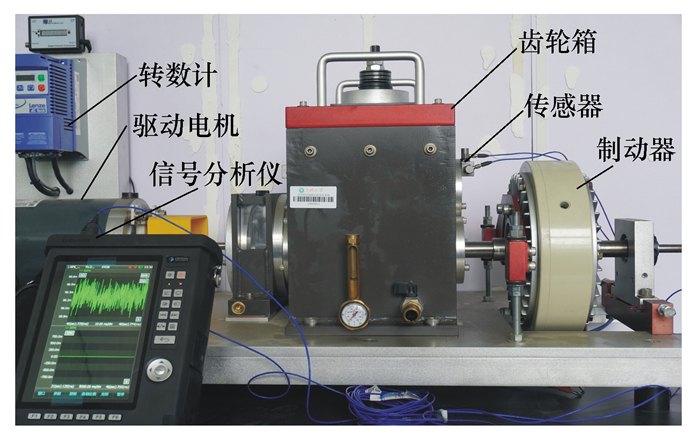
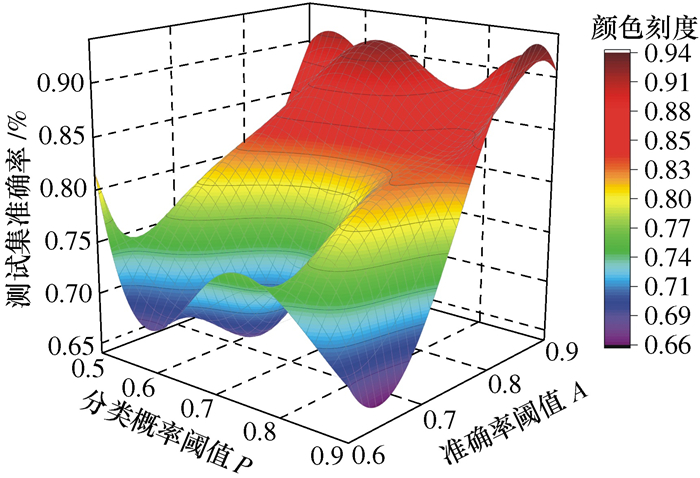
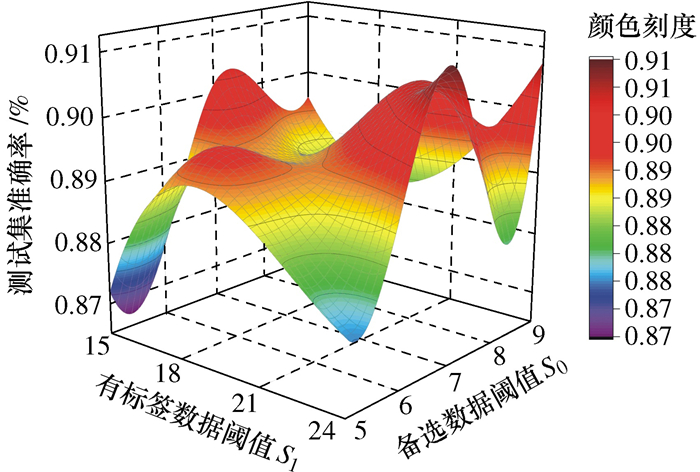
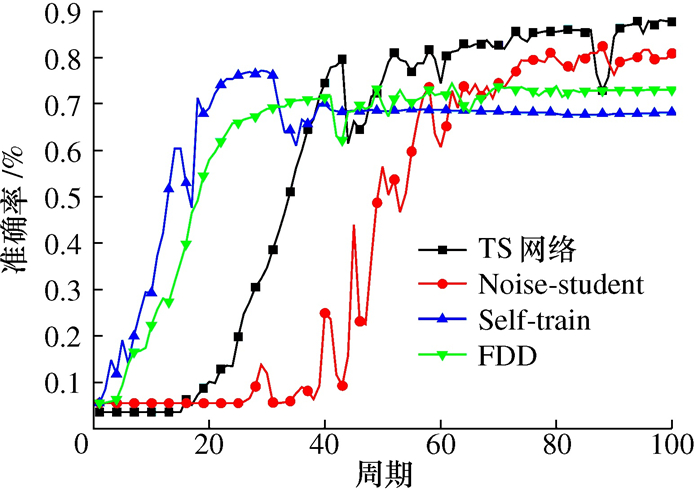
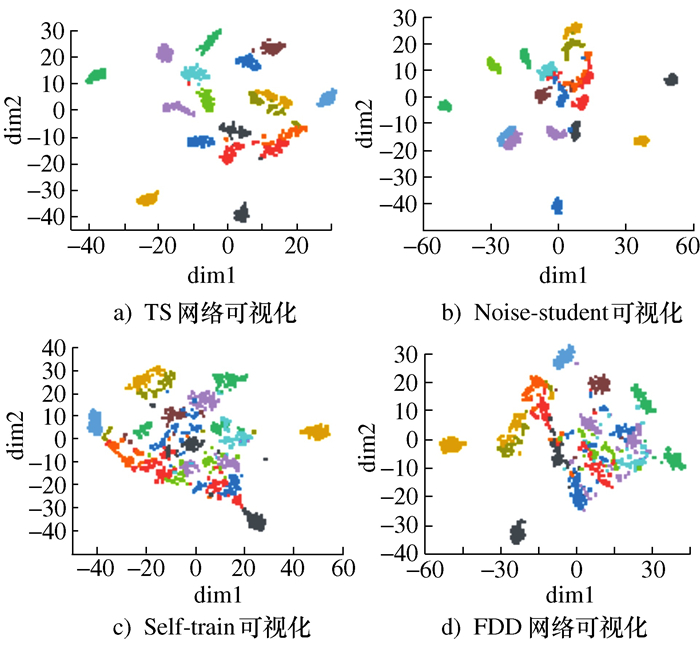
为解决在工业大数据条件下,有标签样本少导致机械故障诊断准确率低的问题,提出了一种半监督神经网络模型。该方法采用协同训练的方式,从时域和频域两个维度训练教师网络(T),将无标签数据转化为高质量的伪标签数据。再利用转化后的伪标签数据训练学生网络(S),通过对数据进行评判和计分,避免网络过拟合。最后通过得分函数,对伪标签数据进行阶梯筛选成为有标签数据。齿轮故障诊断结果表明: TS网络在仅有少量有标签数据的情况下,故障分类准确率达90.31%,与其他半监督方法相比,准确率高出15%~20%。在信噪比(SNR)为5、0、-5的条件下,模型可以达到86.81%、78.00%、52.78%的诊断准确率。
为解决在工业大数据条件下,有标签样本少导致机械故障诊断准确率低的问题,提出了一种半监督神经网络模型。该方法采用协同训练的方式,从时域和频域两个维度训练教师网络(T),将无标签数据转化为高质量的伪标签数据。再利用转化后的伪标签数据训练学生网络(S),通过对数据进行评判和计分,避免网络过拟合。最后通过得分函数,对伪标签数据进行阶梯筛选成为有标签数据。齿轮故障诊断结果表明: TS网络在仅有少量有标签数据的情况下,故障分类准确率达90.31%,与其他半监督方法相比,准确率高出15%~20%。在信噪比(SNR)为5、0、-5的条件下,模型可以达到86.81%、78.00%、52.78%的诊断准确率。
2024,
43(7):
1257-1265. doi: 10.13433/j.cnki.1003-8728.20230019
摘要:
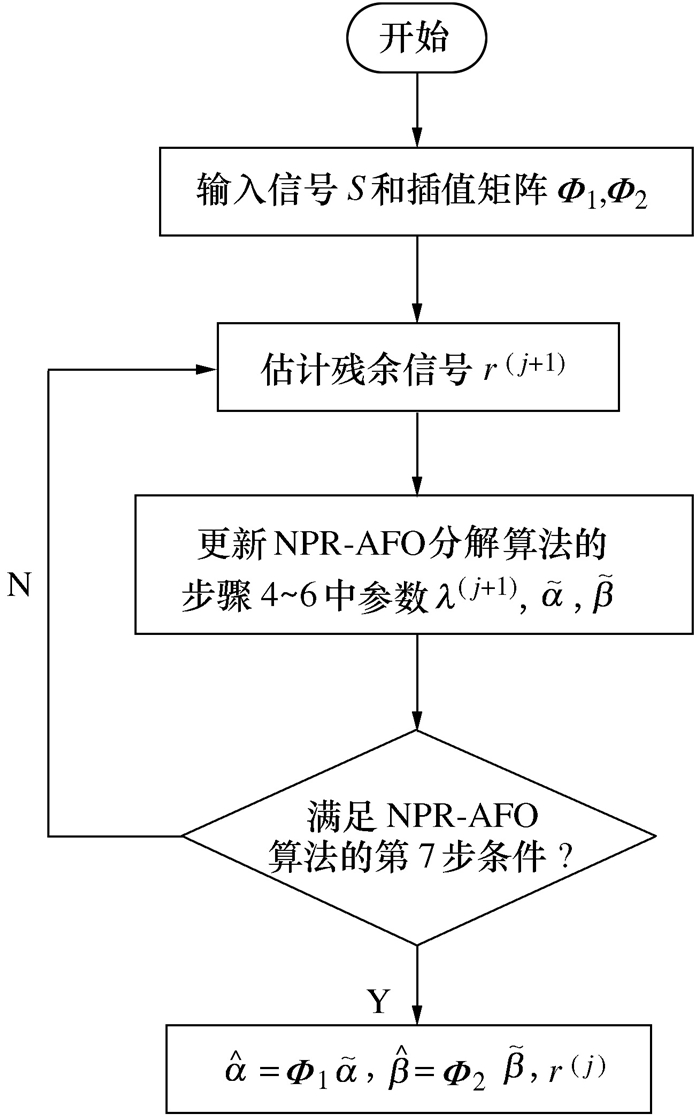
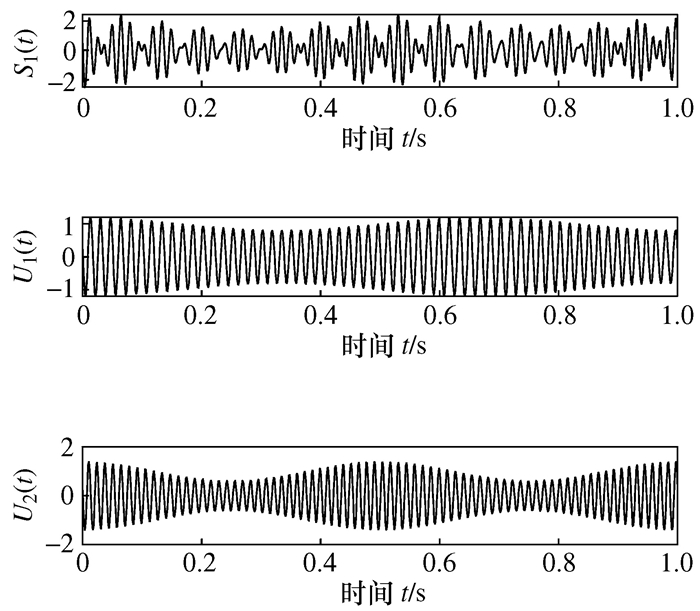
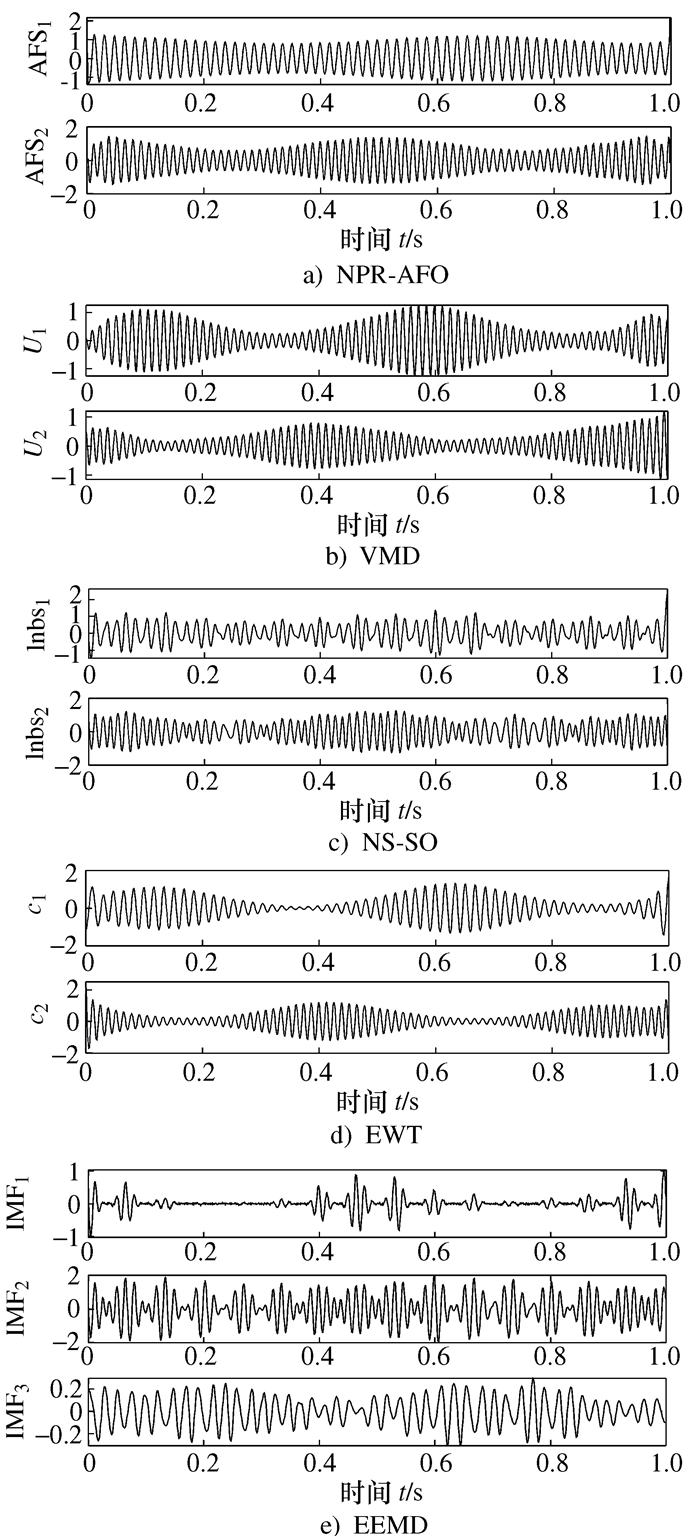
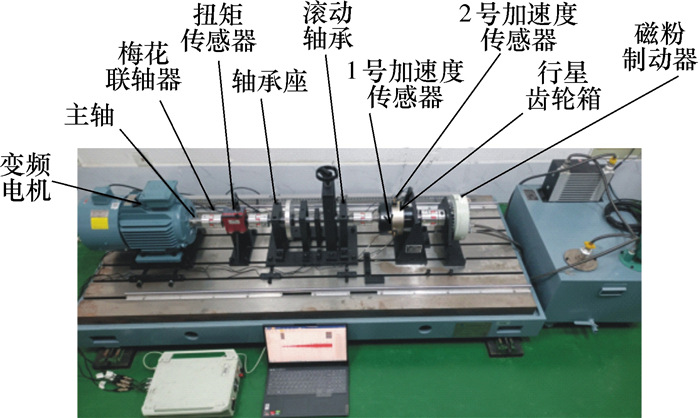
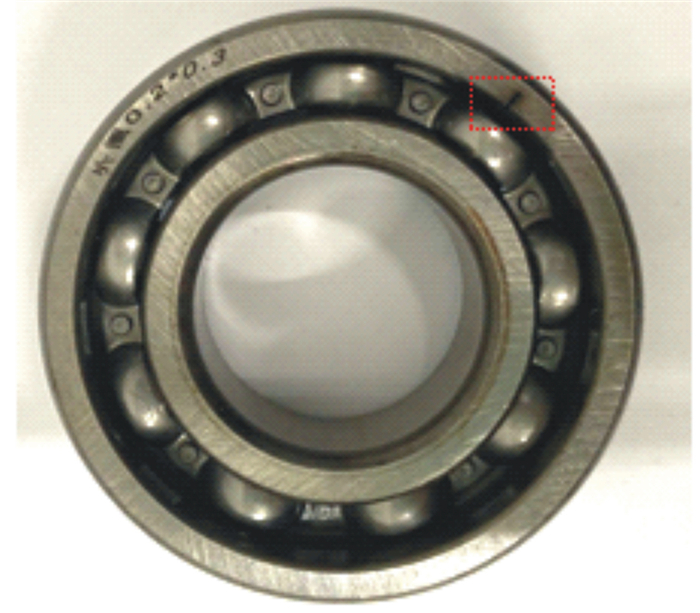
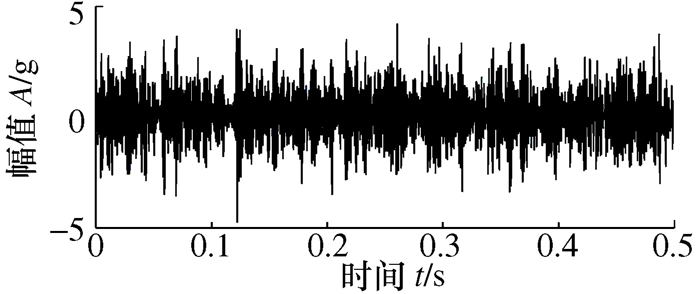
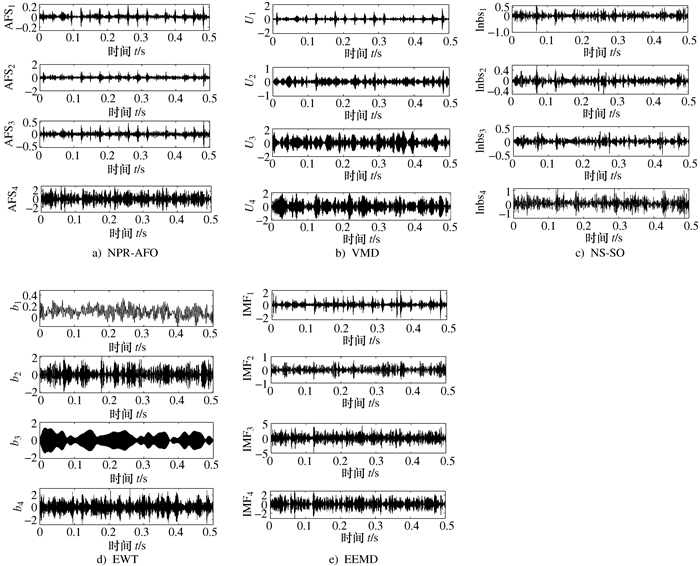
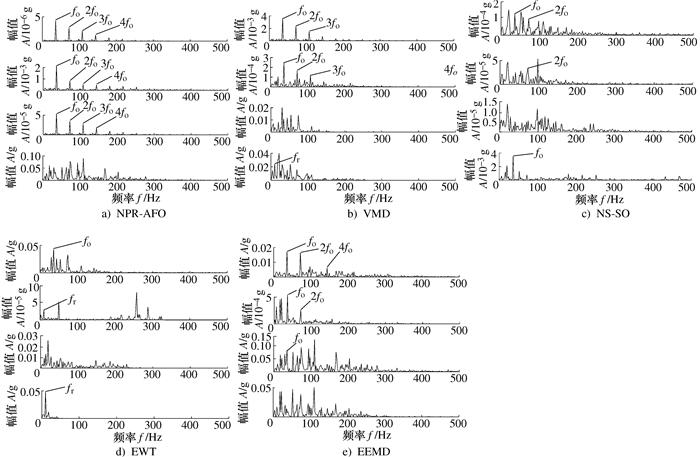
基于算子的零空间追踪算法能够实现复杂信号的自适应分解,其关键在于信号模型的构造与求解。通过定义一种新的可完全消除调幅调频信号的调幅调频算子(AFO),进一步建立了一种基于AFO的信号分解新模型。为了提高参数对信号分解的鲁棒性,将非参数正则化(NPR)方法用于解决上述模型的约束优化问题,提出了一种基于NPR的自适应信号分解方法——NPR-AFO。论文将NPR-AFO方法引入到机械故障诊断中,并通过仿真和滚动轴承局部故障实测数据分析,与现有的其他分解方法进行了对比。结果表明: 所提方法不仅可以有效的提取故障特征,而且状态故障特征更加明显。
基于算子的零空间追踪算法能够实现复杂信号的自适应分解,其关键在于信号模型的构造与求解。通过定义一种新的可完全消除调幅调频信号的调幅调频算子(AFO),进一步建立了一种基于AFO的信号分解新模型。为了提高参数对信号分解的鲁棒性,将非参数正则化(NPR)方法用于解决上述模型的约束优化问题,提出了一种基于NPR的自适应信号分解方法——NPR-AFO。论文将NPR-AFO方法引入到机械故障诊断中,并通过仿真和滚动轴承局部故障实测数据分析,与现有的其他分解方法进行了对比。结果表明: 所提方法不仅可以有效的提取故障特征,而且状态故障特征更加明显。
2024,
43(7):
1266-1276. doi: 10.13433/j.cnki.1003-8728.20230017
摘要:
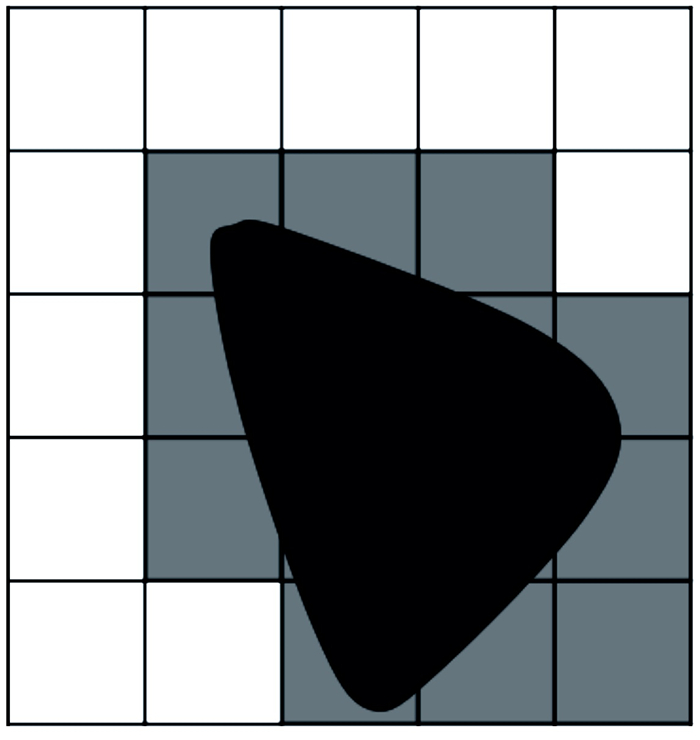
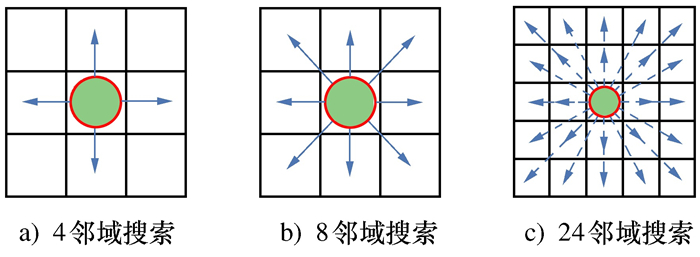
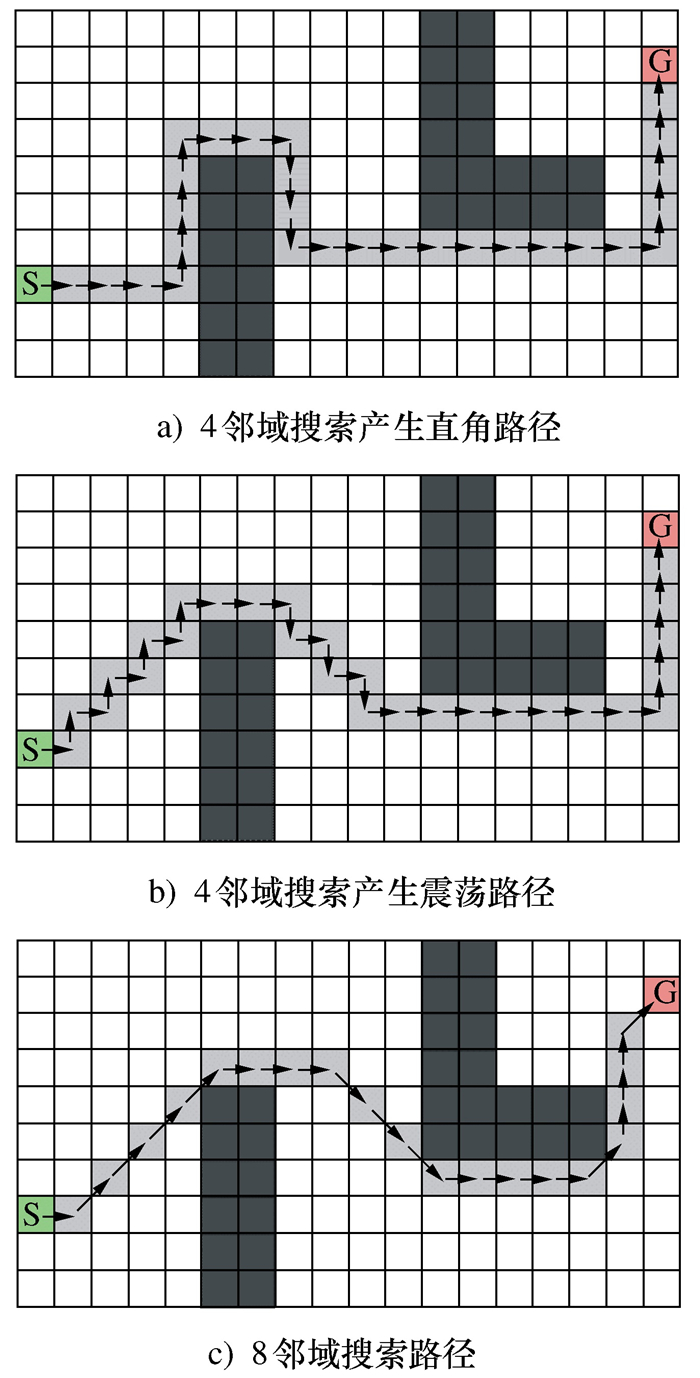
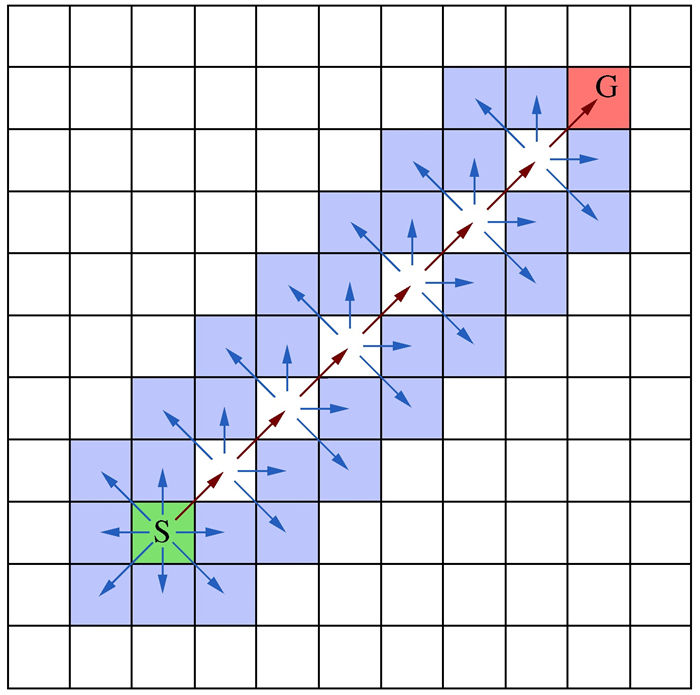
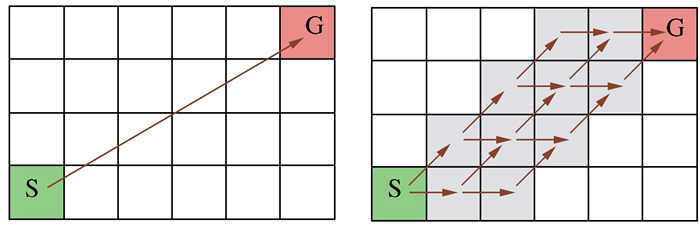
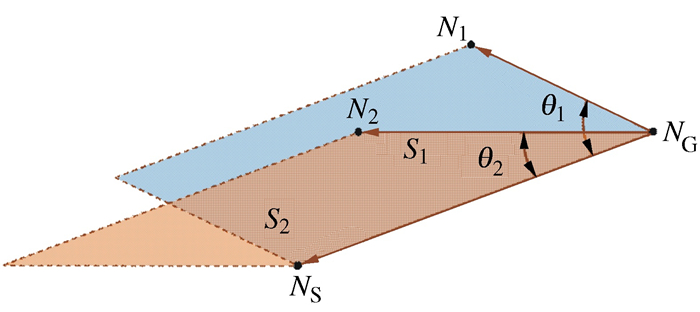
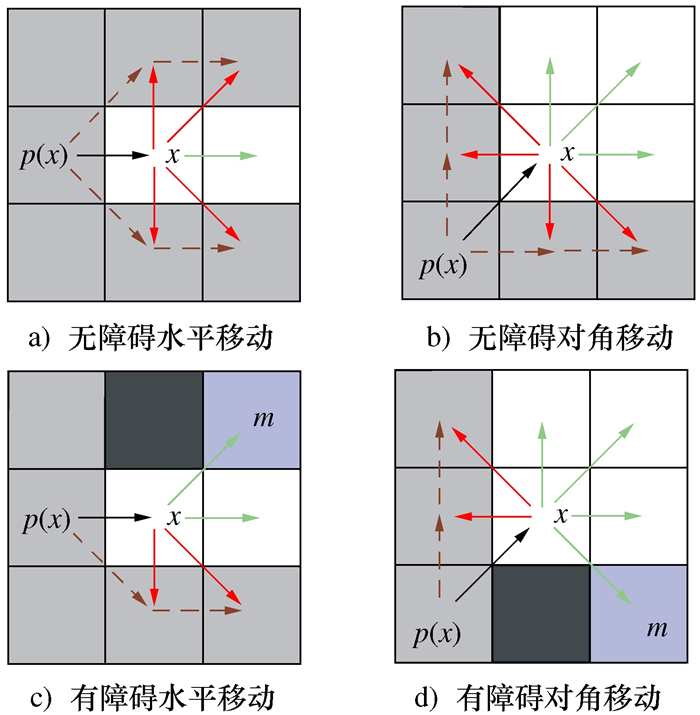
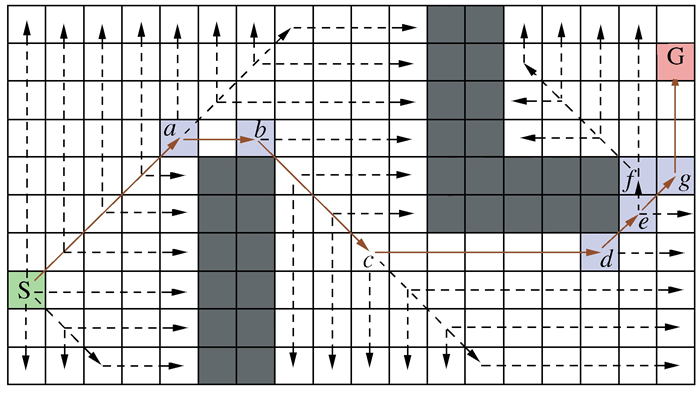
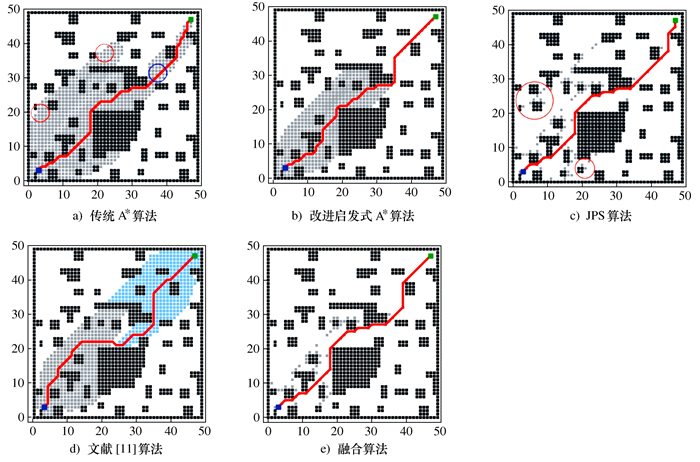
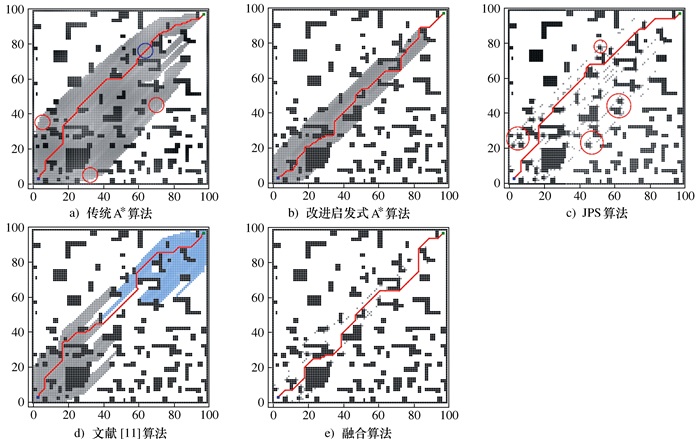
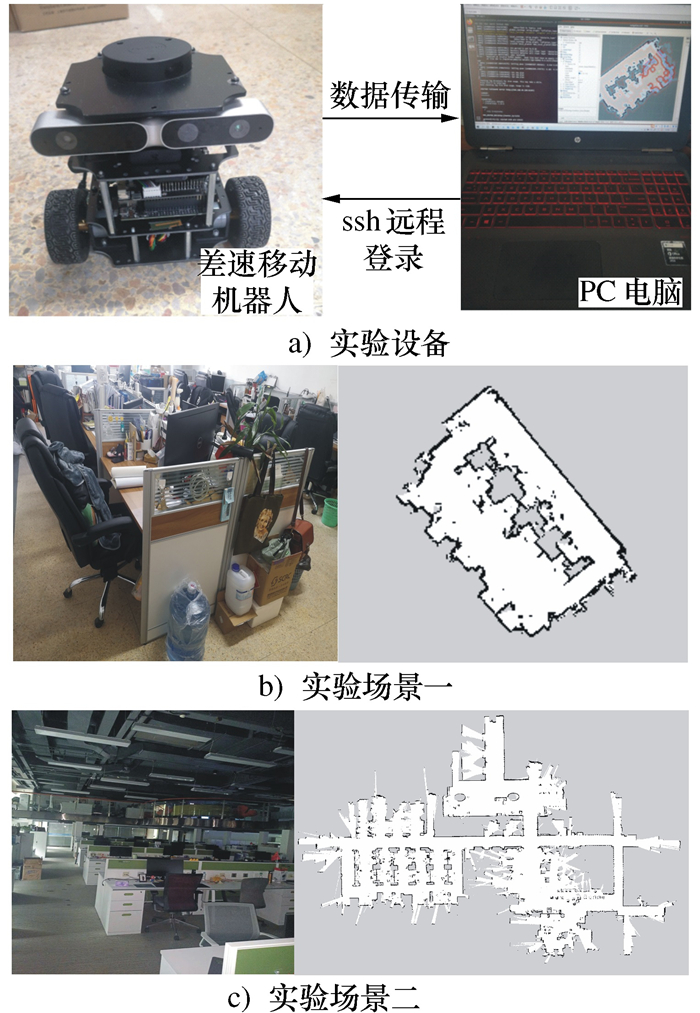
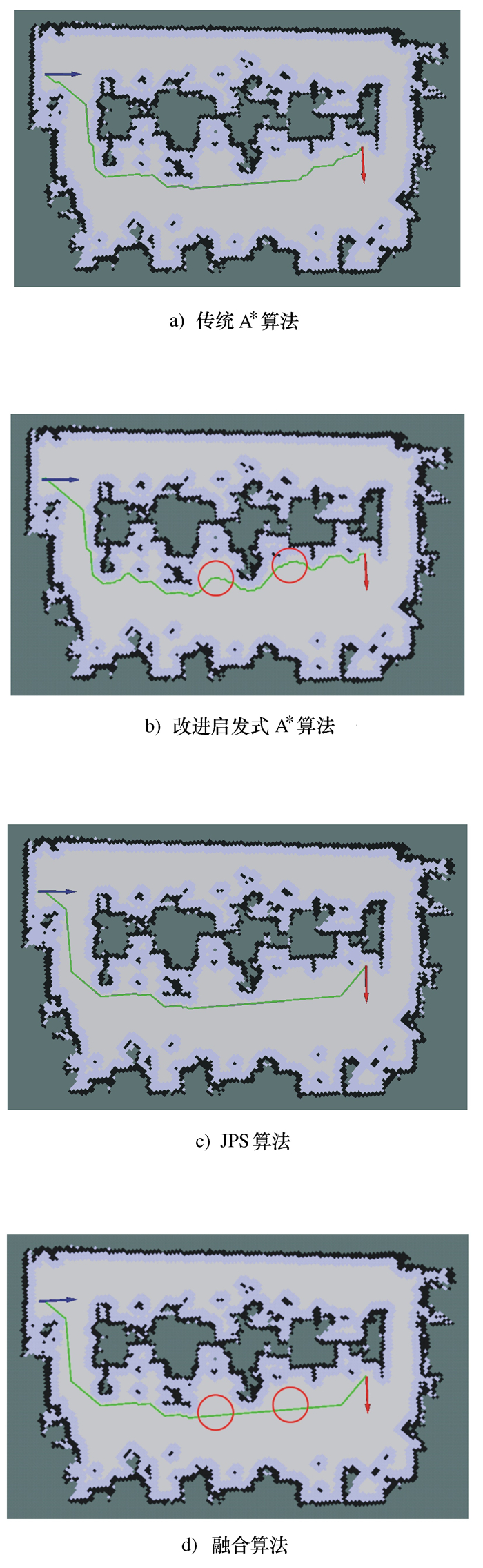
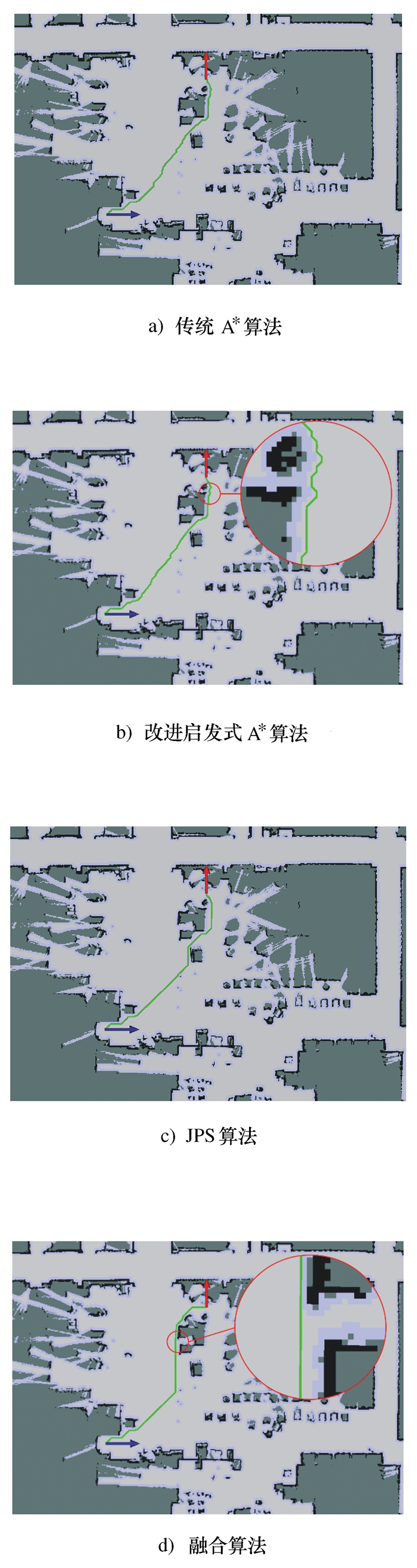
为解决传统A*寻路算法在搜索过程中会产生大量冗余节点,导致算法整体搜索效率低,运算内存消耗大等问题,从A*算法的两个重要决策点出发,改进算法的代价评估函数与邻节点搜索策略,提出一种改进融合算法。首先,采用向量叉积与尺度平衡因子相结合的方法优化传统A*算法的启发函数,减少A*算法寻路过程中在最优路径周围产生的具有相同代价值的冗余节点,减少了对称路径的搜索;其次,融合跳点搜索(Jump point search, JPS)策略,通过逻辑判断实现路径的变步长跳跃搜索,避免了A*算法逐层搜索效率低的弊端。在不同尺寸的栅格地图中进行仿真分析,发现改进融合算法相比于传统A*算法,在路径长度基本相等的情况下,节点搜索数量约减少95%,且与传统JPS寻路算法相比,有效过滤了路径周围复杂形状障碍物产生的大量冗余跳点。最后,将改进融合算法应用于ROS移动机器人并进行对比实验以验证算法的可行性。实验结果表明:改进融合算法在获得高效安全的路径基础上,搜索效率相比于A*算法可提高约94%。
为解决传统A*寻路算法在搜索过程中会产生大量冗余节点,导致算法整体搜索效率低,运算内存消耗大等问题,从A*算法的两个重要决策点出发,改进算法的代价评估函数与邻节点搜索策略,提出一种改进融合算法。首先,采用向量叉积与尺度平衡因子相结合的方法优化传统A*算法的启发函数,减少A*算法寻路过程中在最优路径周围产生的具有相同代价值的冗余节点,减少了对称路径的搜索;其次,融合跳点搜索(Jump point search, JPS)策略,通过逻辑判断实现路径的变步长跳跃搜索,避免了A*算法逐层搜索效率低的弊端。在不同尺寸的栅格地图中进行仿真分析,发现改进融合算法相比于传统A*算法,在路径长度基本相等的情况下,节点搜索数量约减少95%,且与传统JPS寻路算法相比,有效过滤了路径周围复杂形状障碍物产生的大量冗余跳点。最后,将改进融合算法应用于ROS移动机器人并进行对比实验以验证算法的可行性。实验结果表明:改进融合算法在获得高效安全的路径基础上,搜索效率相比于A*算法可提高约94%。
2024,
43(7):
1277-1282. doi: 10.13433/j.cnki.1003-8728.20230044
摘要:
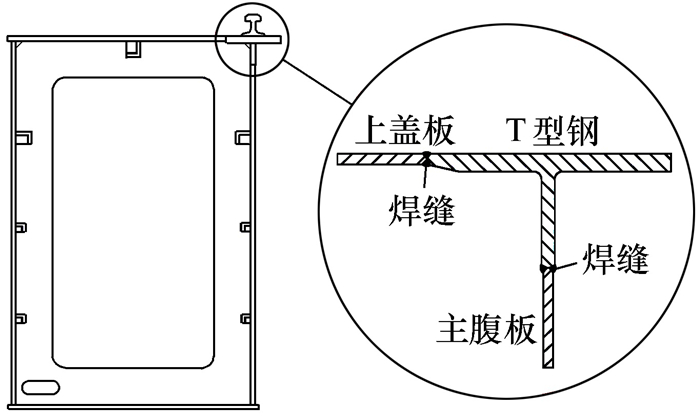
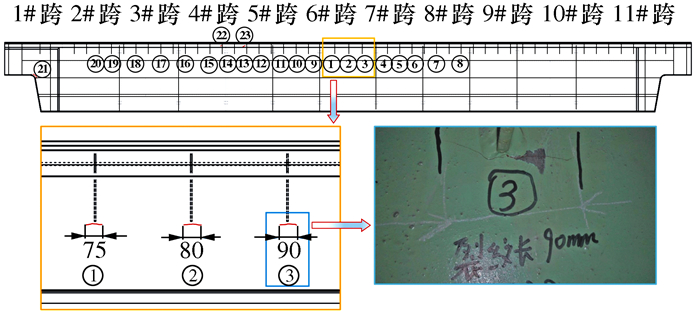
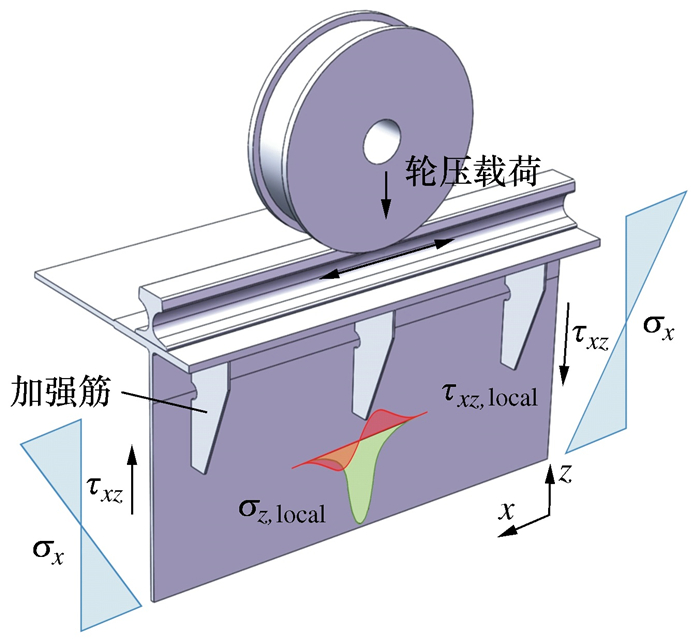
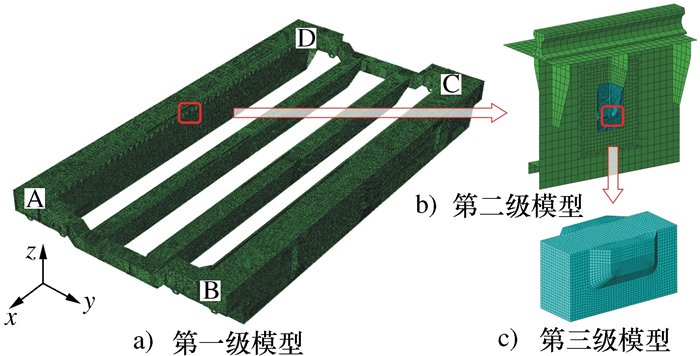
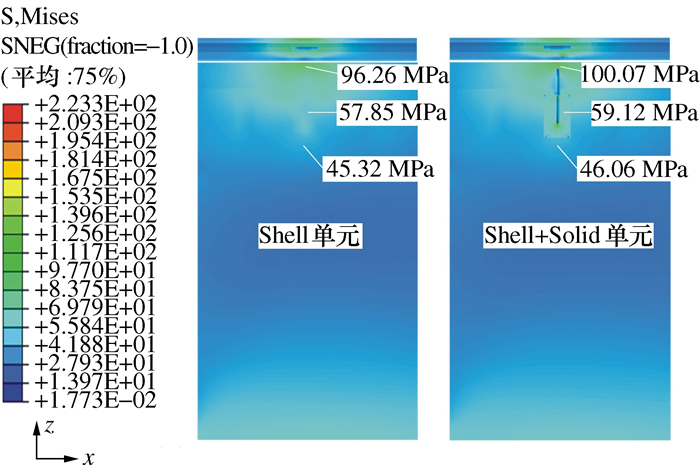
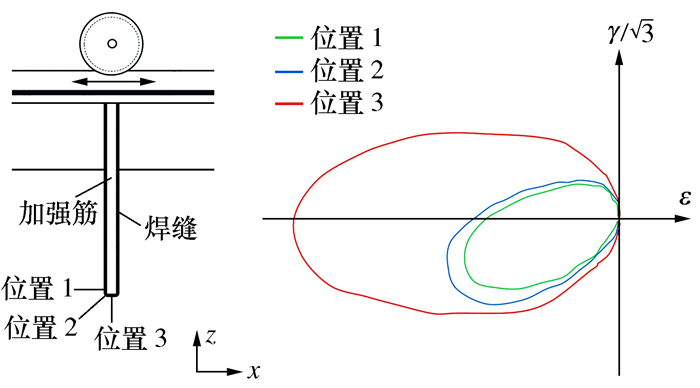
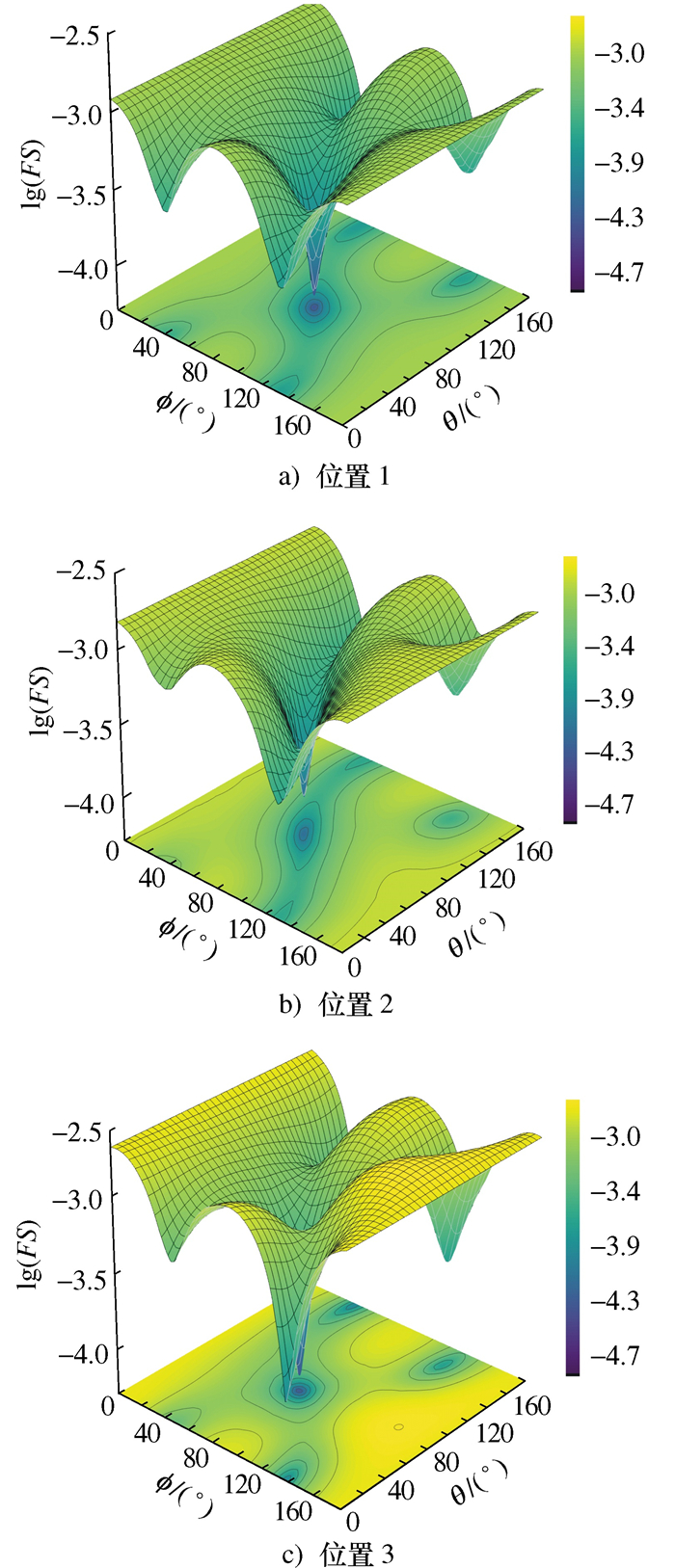
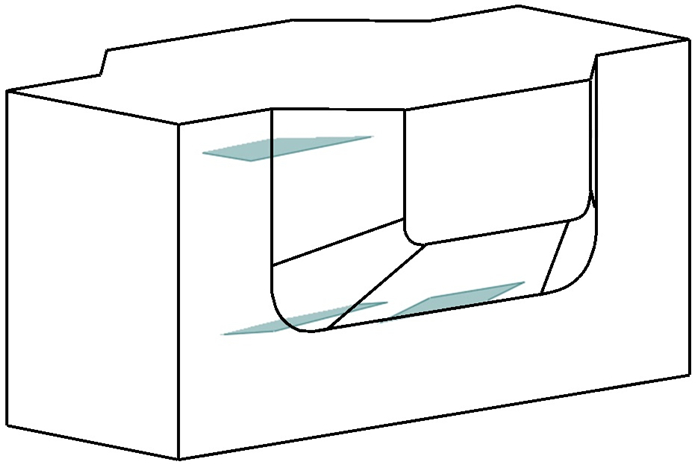
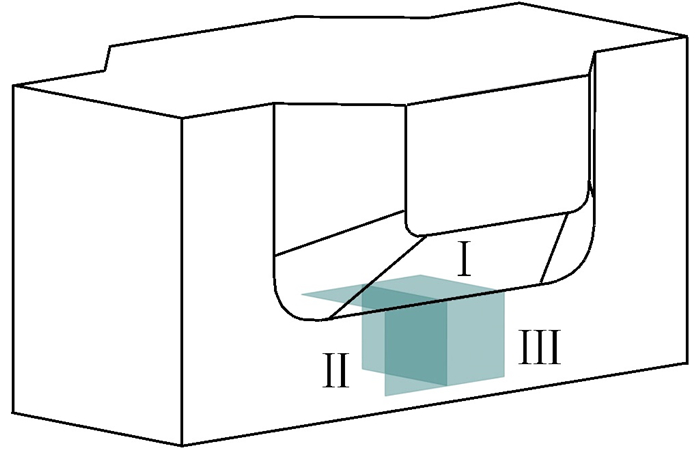
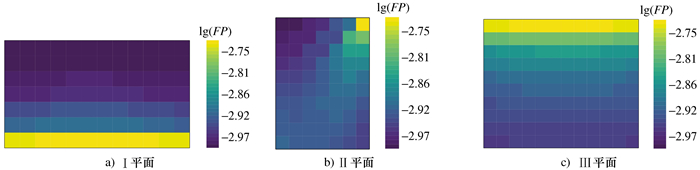
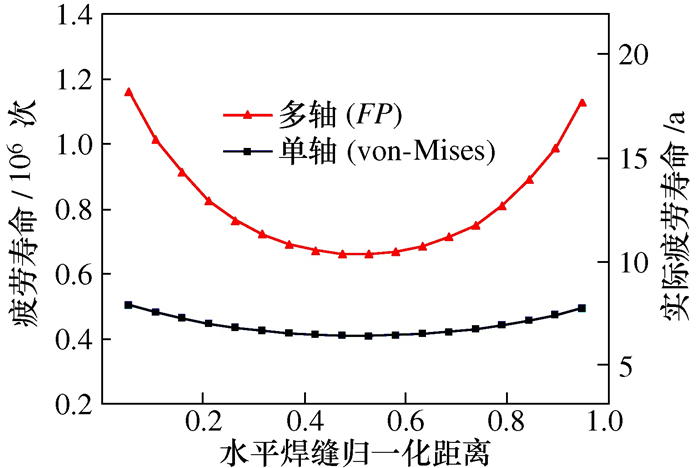
铸造起重机金属结构是一种典型的复杂焊接结构,在移动轮压载荷和复杂焊缝几何的共同作用下,一些非常规部位时常出现疲劳裂纹。针对某在役铸造起重机主梁轨道下方T型钢与小筋板连接焊缝区域发生的密集疲劳裂损问题,采用Soild-Shell混合单元和子模型技术,建立了裂损局部区域的精细有限元模型,模拟了移动轮压载荷作用下整体金属结构的完整应力时间历程,分析了裂损部位的多轴特性。采用基于临界平面法的多轴疲劳模型,计算并讨论了裂损区域的疲劳性能。结果表明:多轴应力是导致裂损部位萌生裂纹的主要原因,F-S多轴疲劳模型可以有效评估裂损部位的疲劳性能。
铸造起重机金属结构是一种典型的复杂焊接结构,在移动轮压载荷和复杂焊缝几何的共同作用下,一些非常规部位时常出现疲劳裂纹。针对某在役铸造起重机主梁轨道下方T型钢与小筋板连接焊缝区域发生的密集疲劳裂损问题,采用Soild-Shell混合单元和子模型技术,建立了裂损局部区域的精细有限元模型,模拟了移动轮压载荷作用下整体金属结构的完整应力时间历程,分析了裂损部位的多轴特性。采用基于临界平面法的多轴疲劳模型,计算并讨论了裂损区域的疲劳性能。结果表明:多轴应力是导致裂损部位萌生裂纹的主要原因,F-S多轴疲劳模型可以有效评估裂损部位的疲劳性能。