作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2024年 43卷 第5期
2024, 43(5): 737-749.
doi: 10.13433/j.cnki.1003-8728.20220285
 摘要
摘要 HTML
HTML PDF 5794KB
PDF 5794KB
摘要:
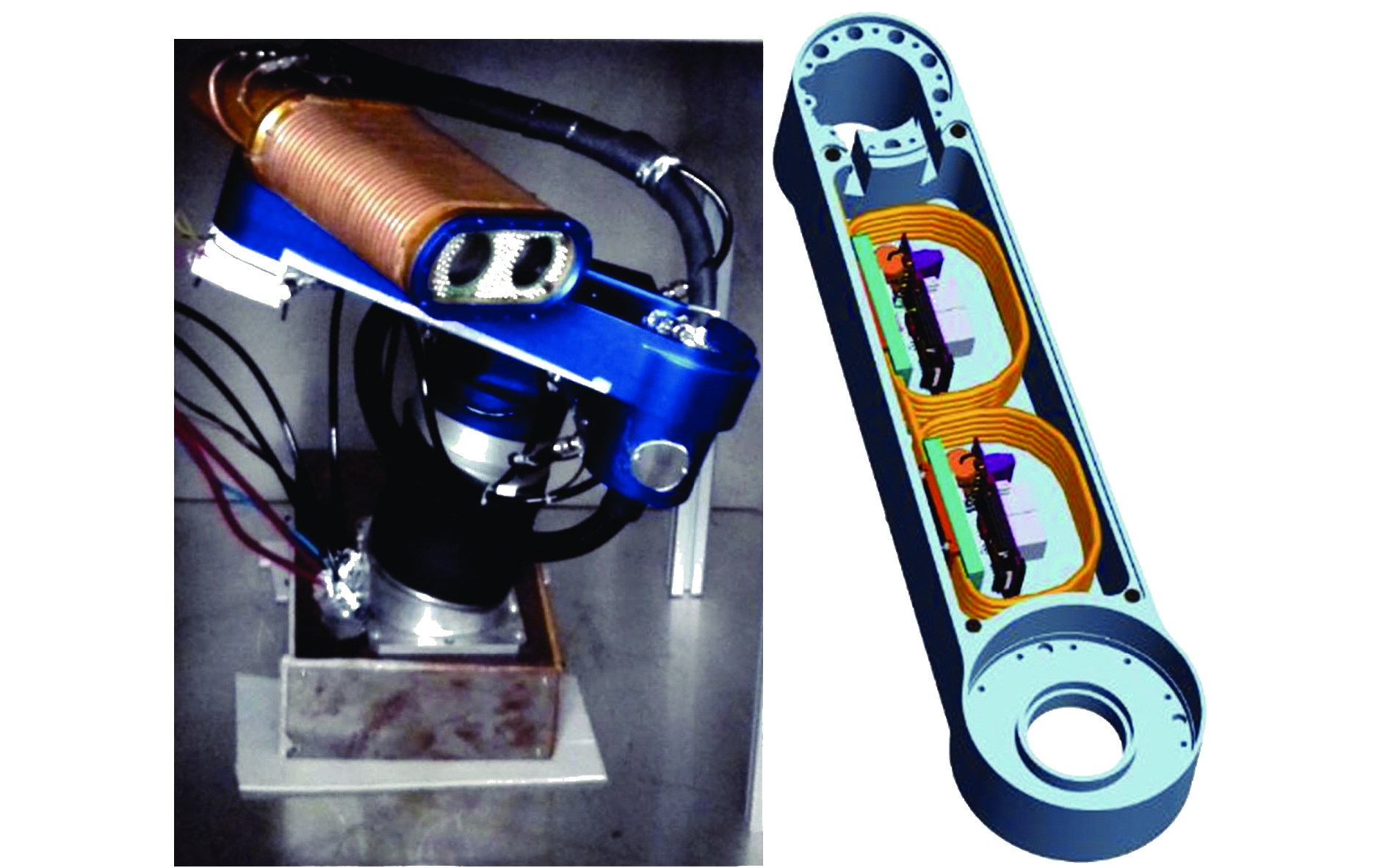
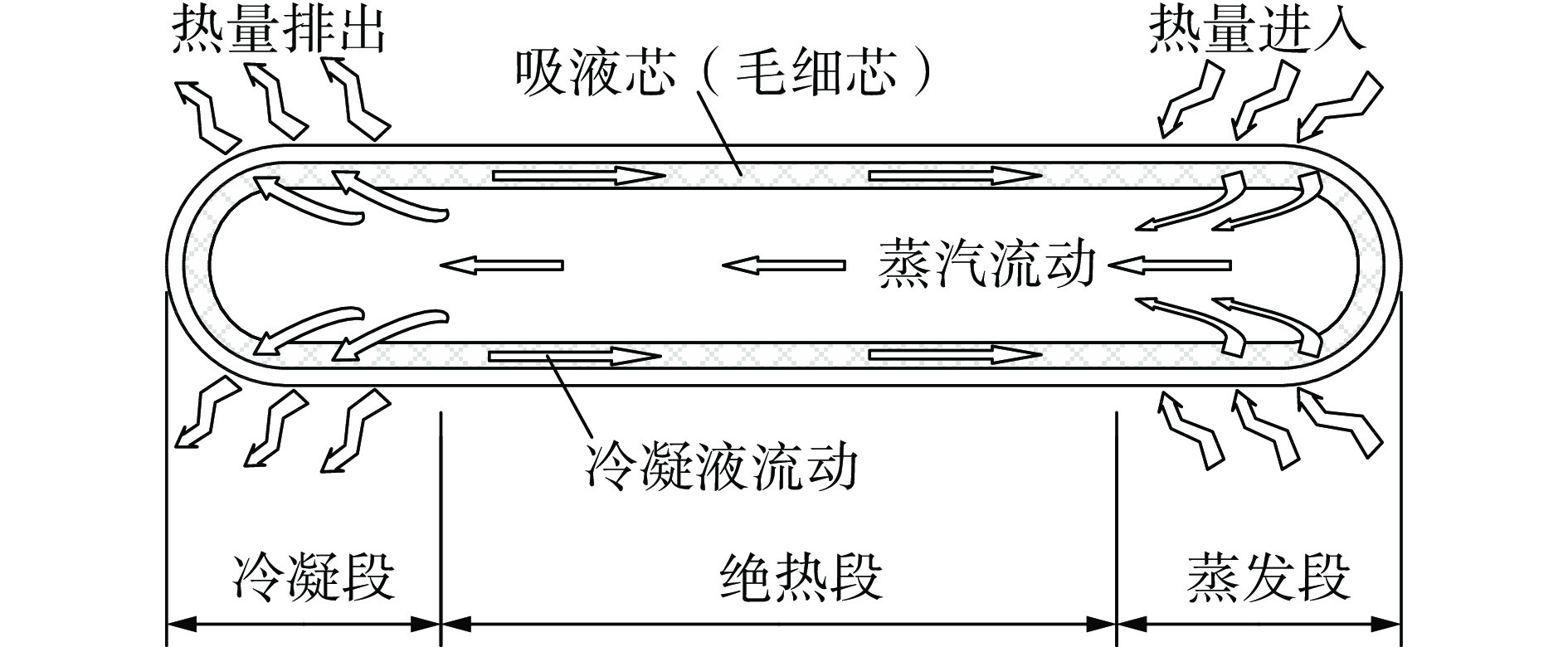
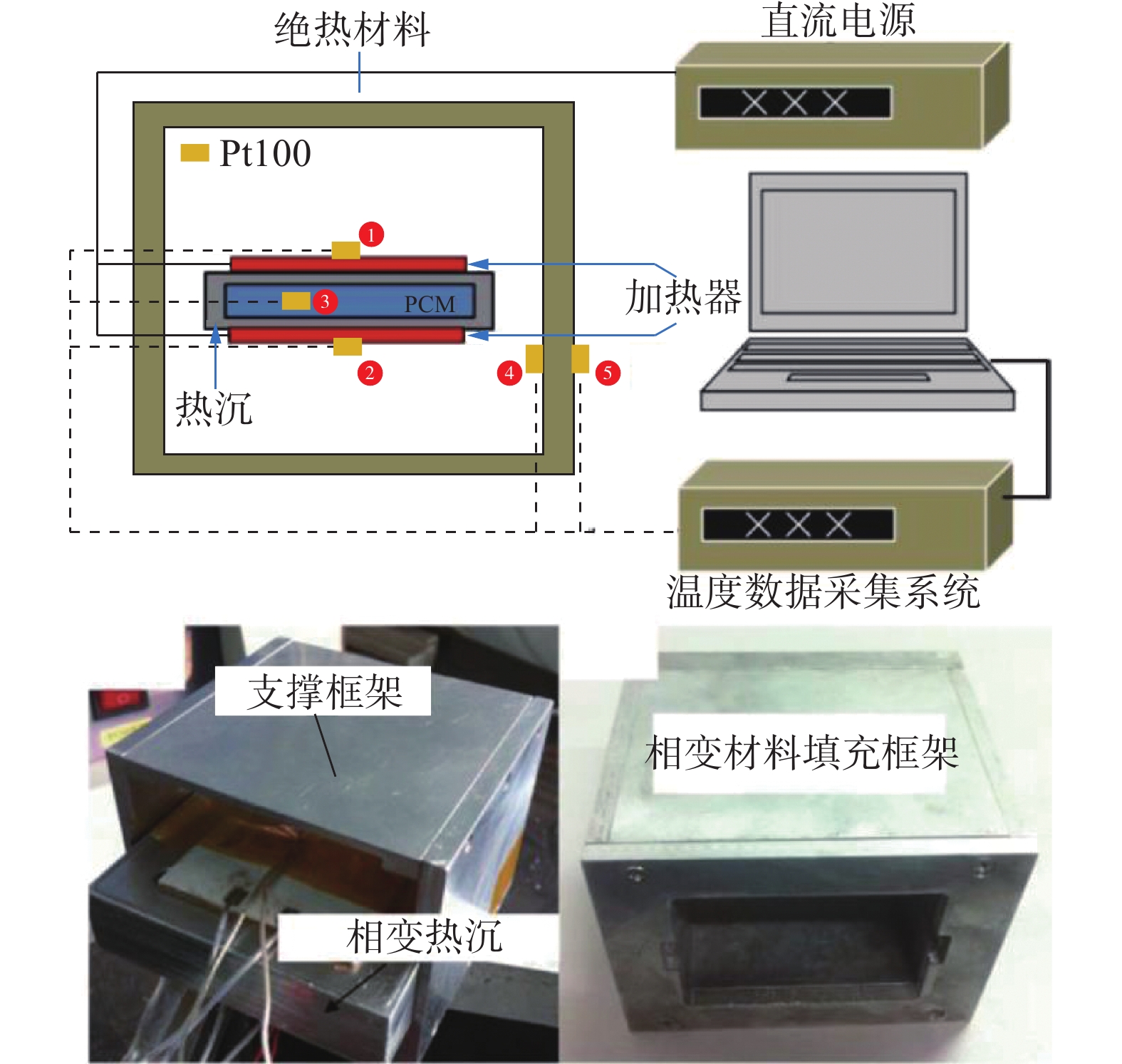
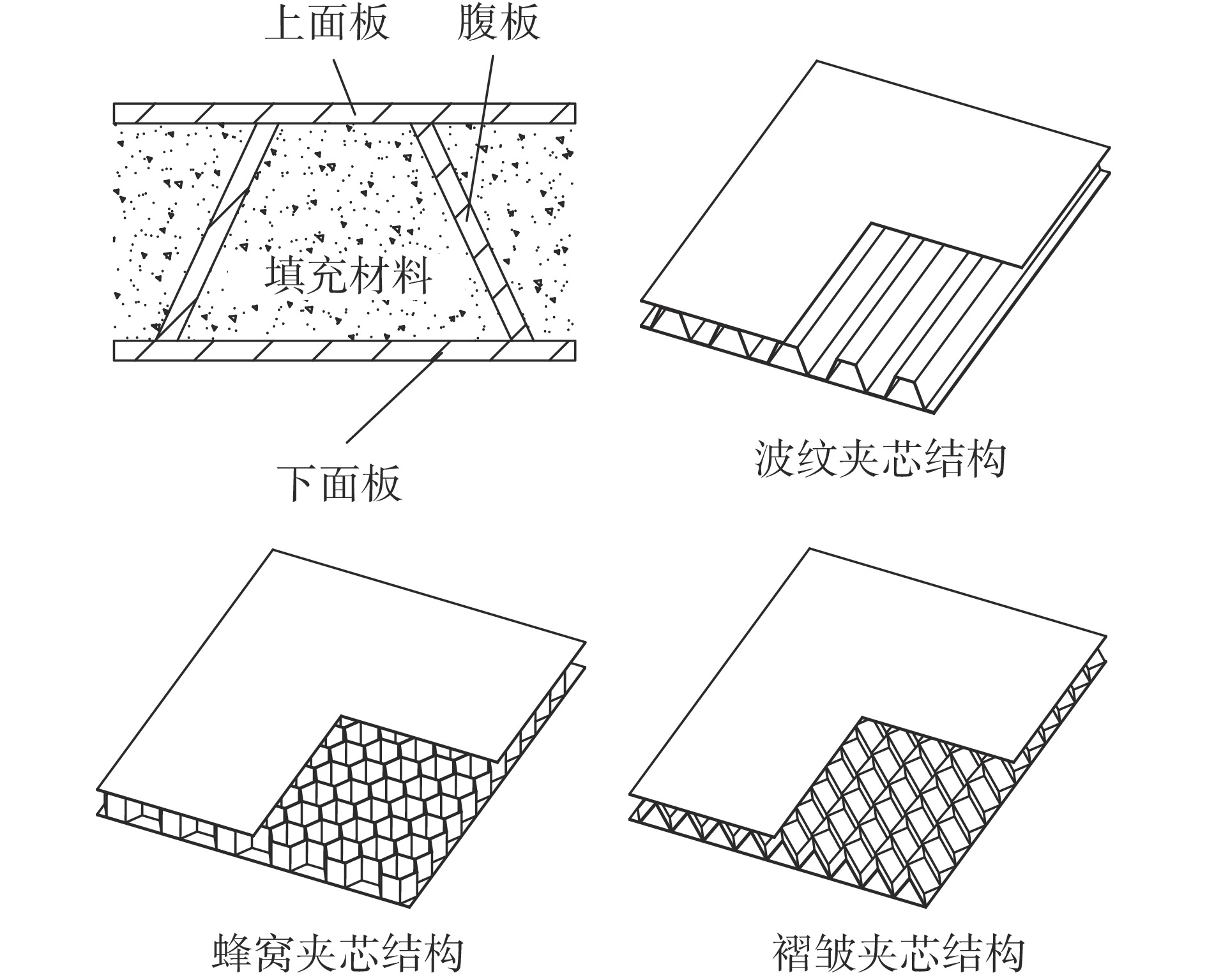
现今,采用机器人代替人类完成各种危险的任务已经成为一种趋势。然而,机器人在高温环境下的应用受到热控技术发展的严重制约。本文首先介绍了机器人内部热敏感器件及相应的温控研究工作,进而对近年来机器人热控技术的发展现状进行了综述与分析,最后对高温环境下机器人热防护的关键问题和技术应用分别进行了探讨与展望。
现今,采用机器人代替人类完成各种危险的任务已经成为一种趋势。然而,机器人在高温环境下的应用受到热控技术发展的严重制约。本文首先介绍了机器人内部热敏感器件及相应的温控研究工作,进而对近年来机器人热控技术的发展现状进行了综述与分析,最后对高温环境下机器人热防护的关键问题和技术应用分别进行了探讨与展望。


2024, 43(5): 750-755.
doi: 10.13433/j.cnki.1003-8728.20220272
摘要:
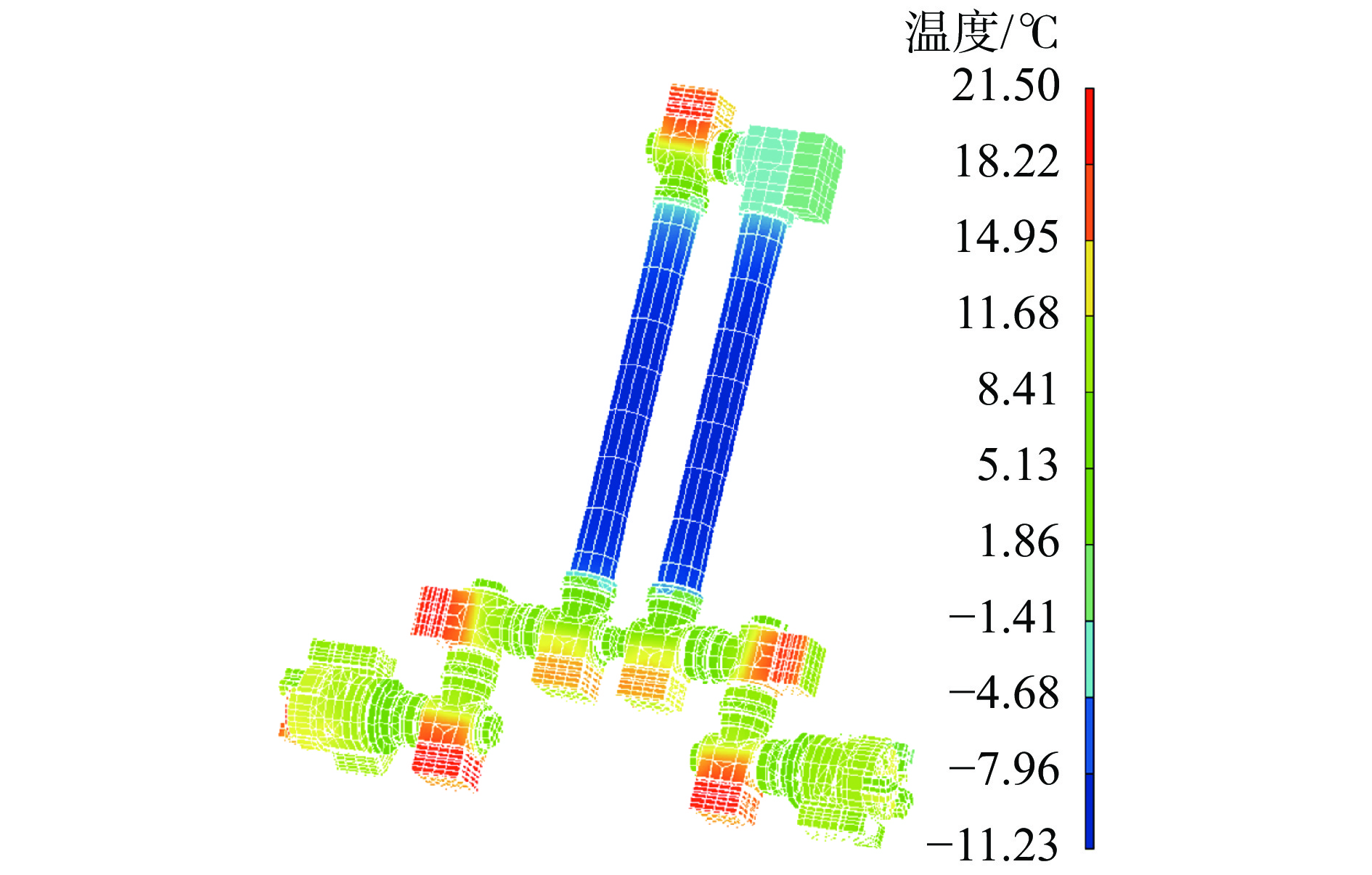
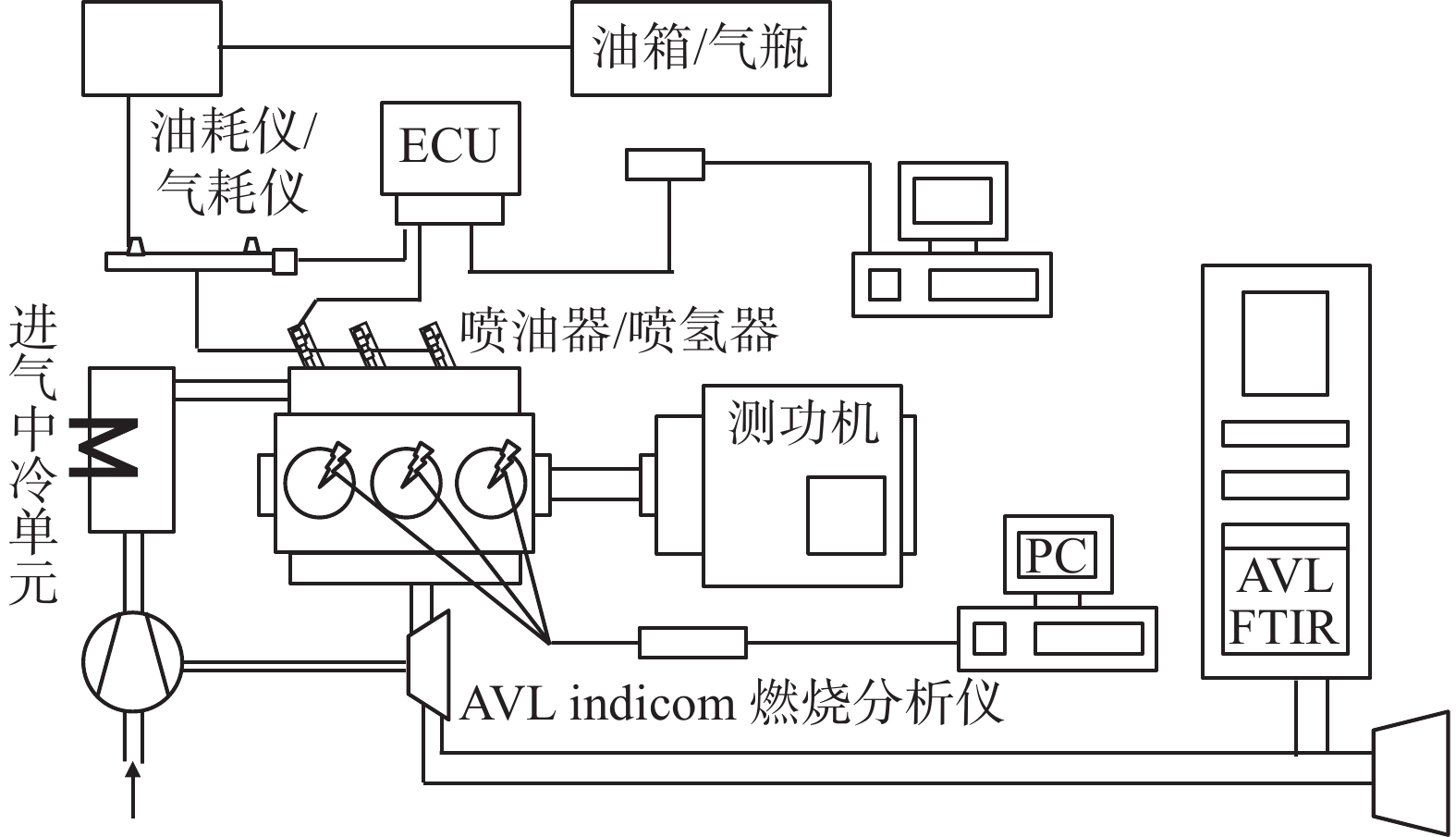
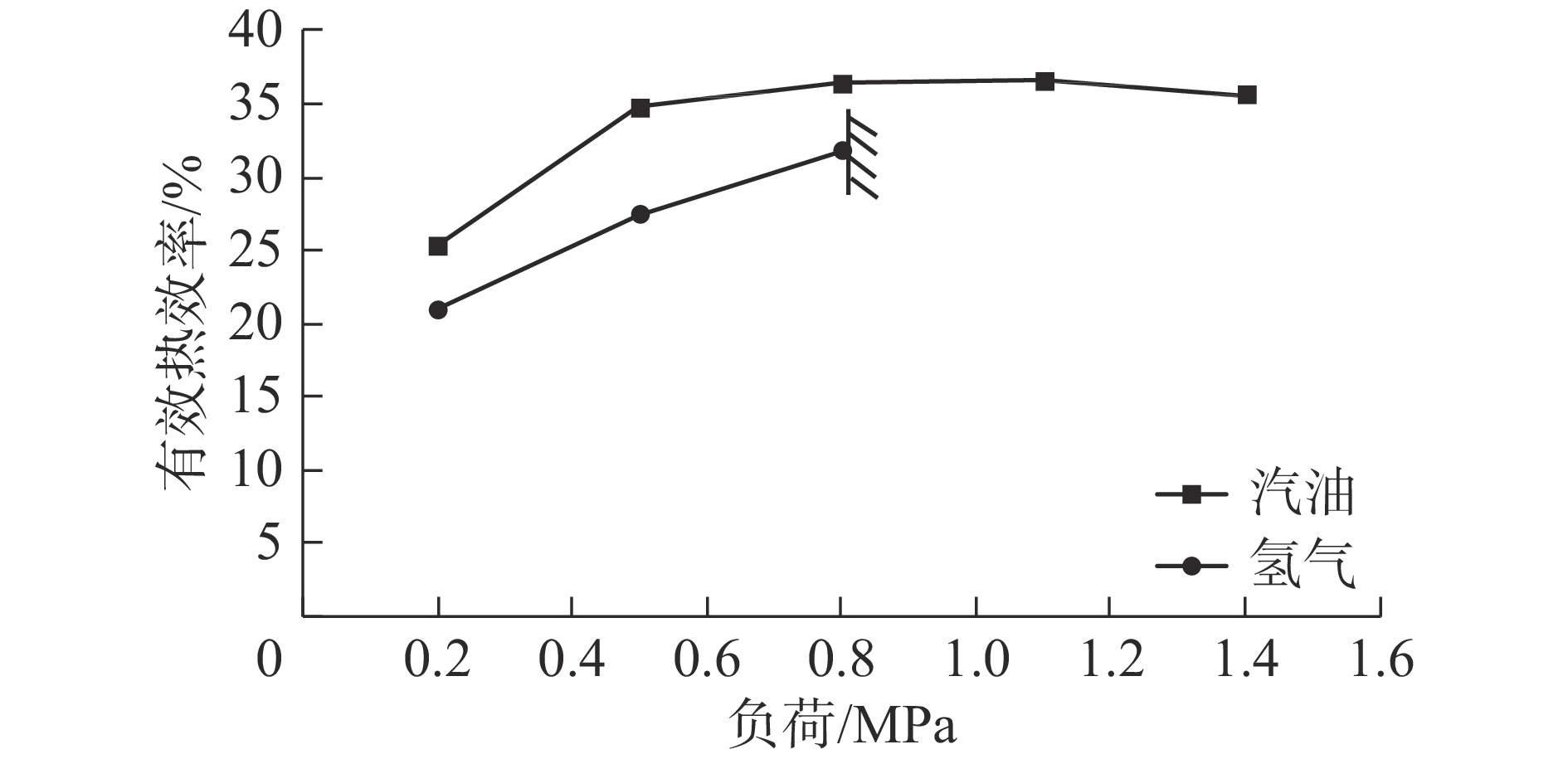
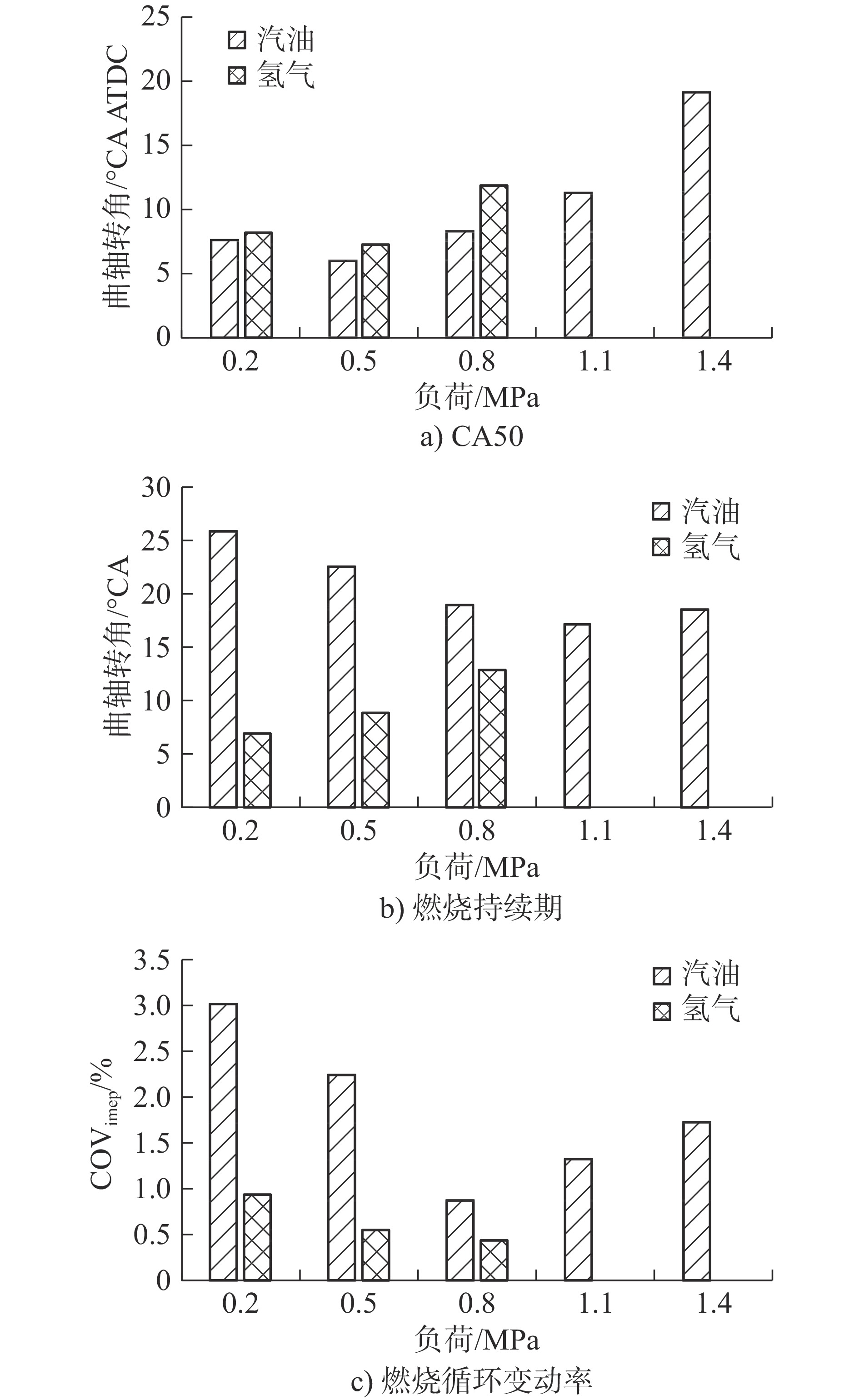
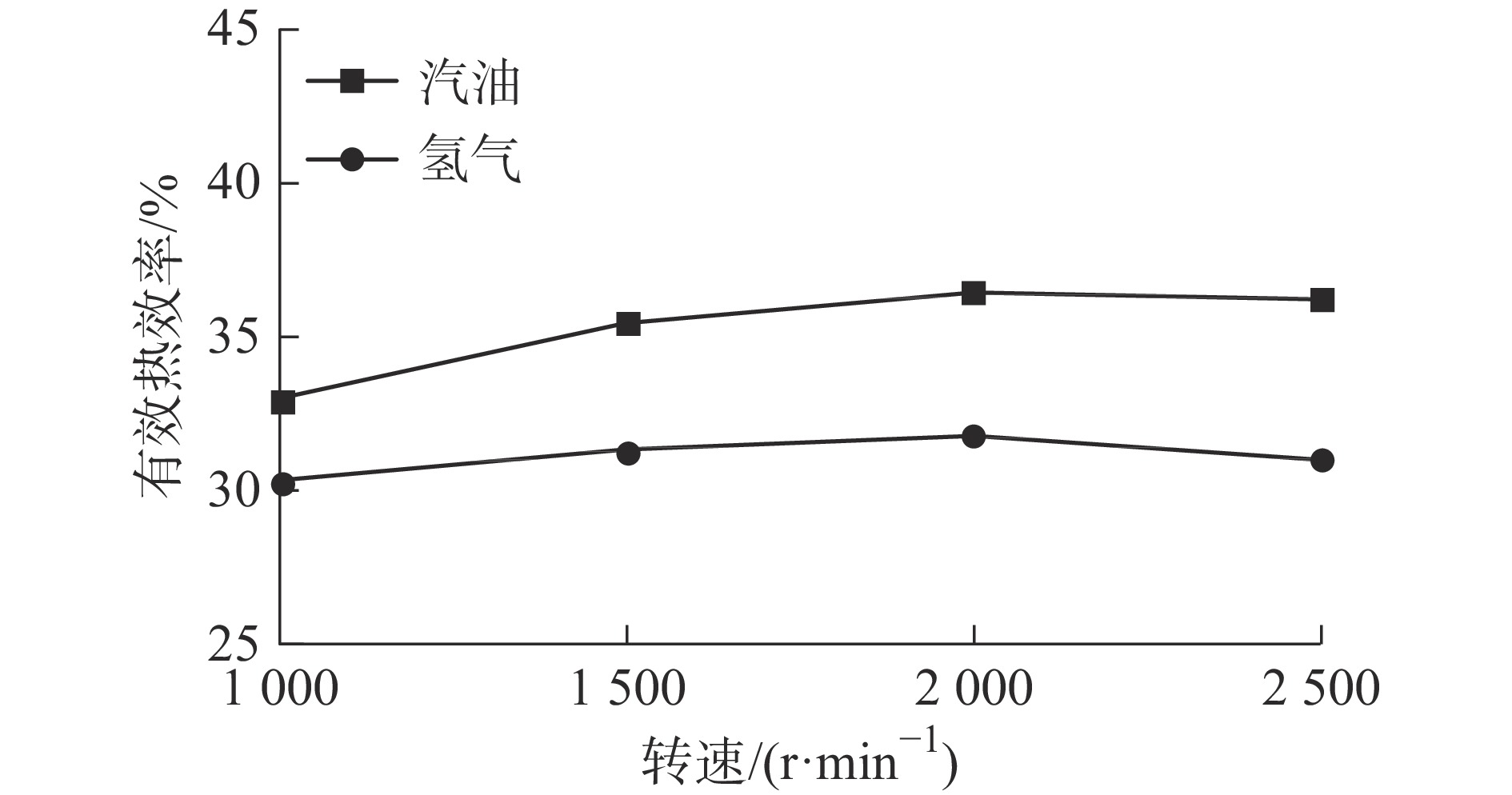
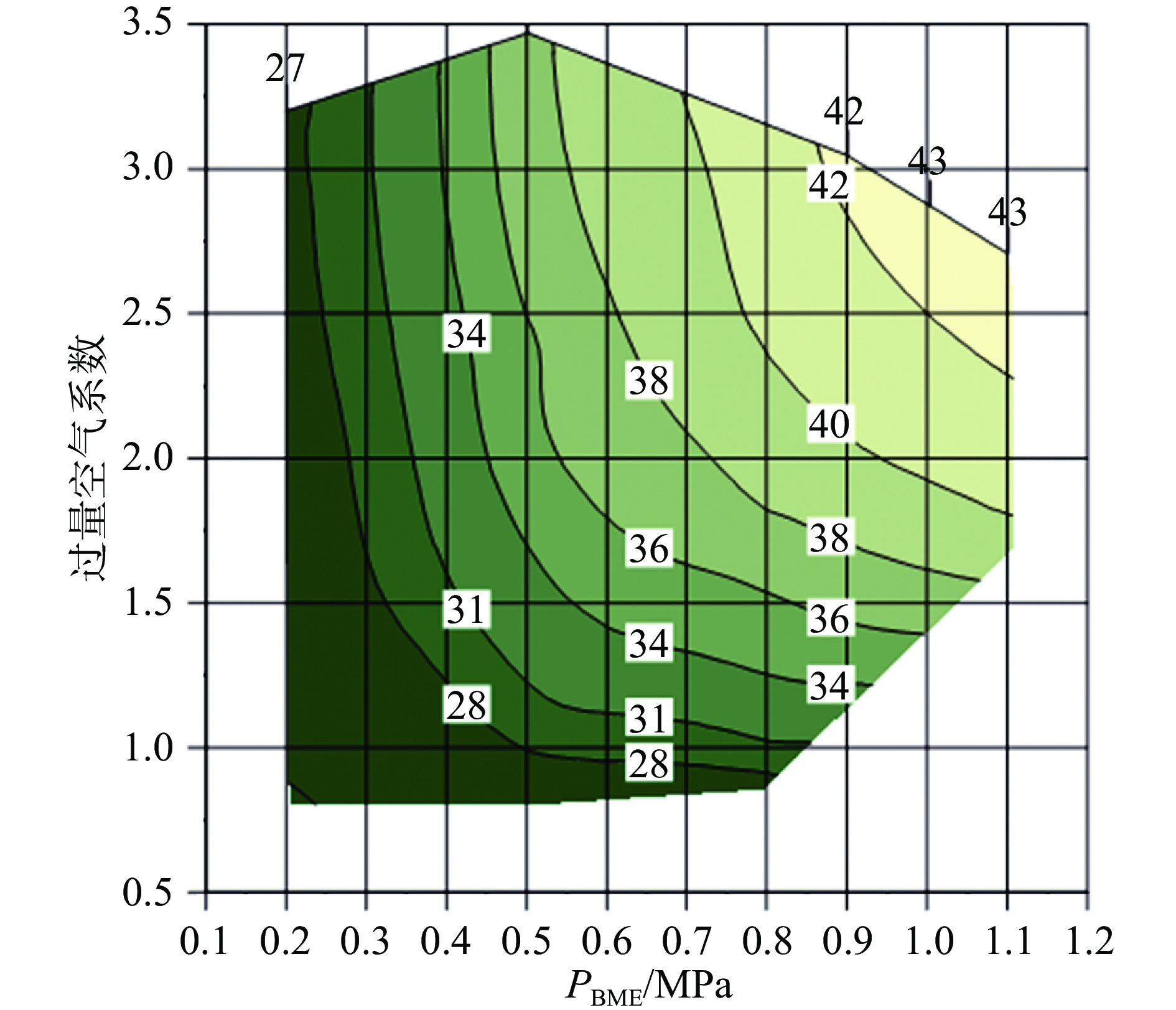
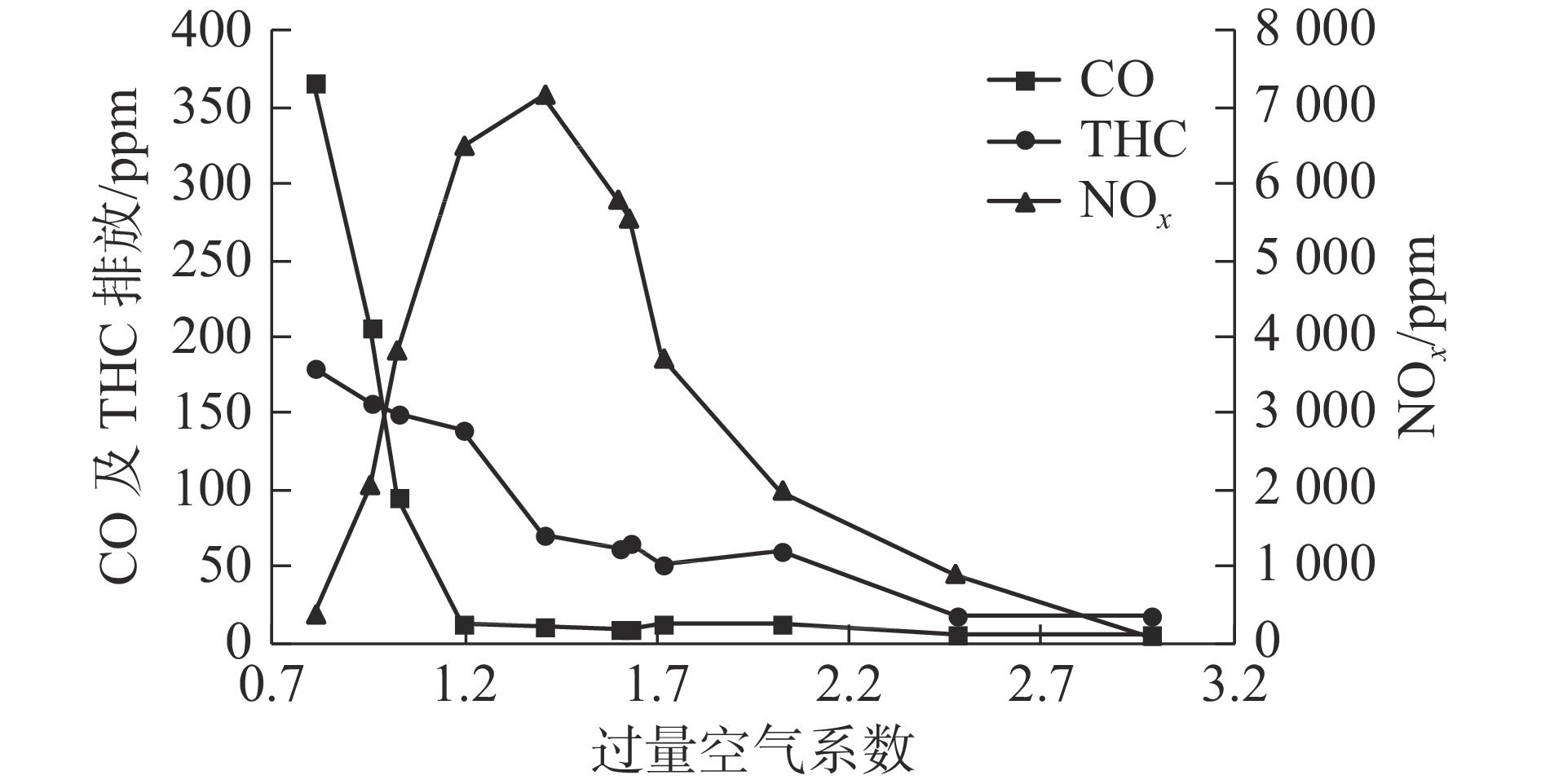
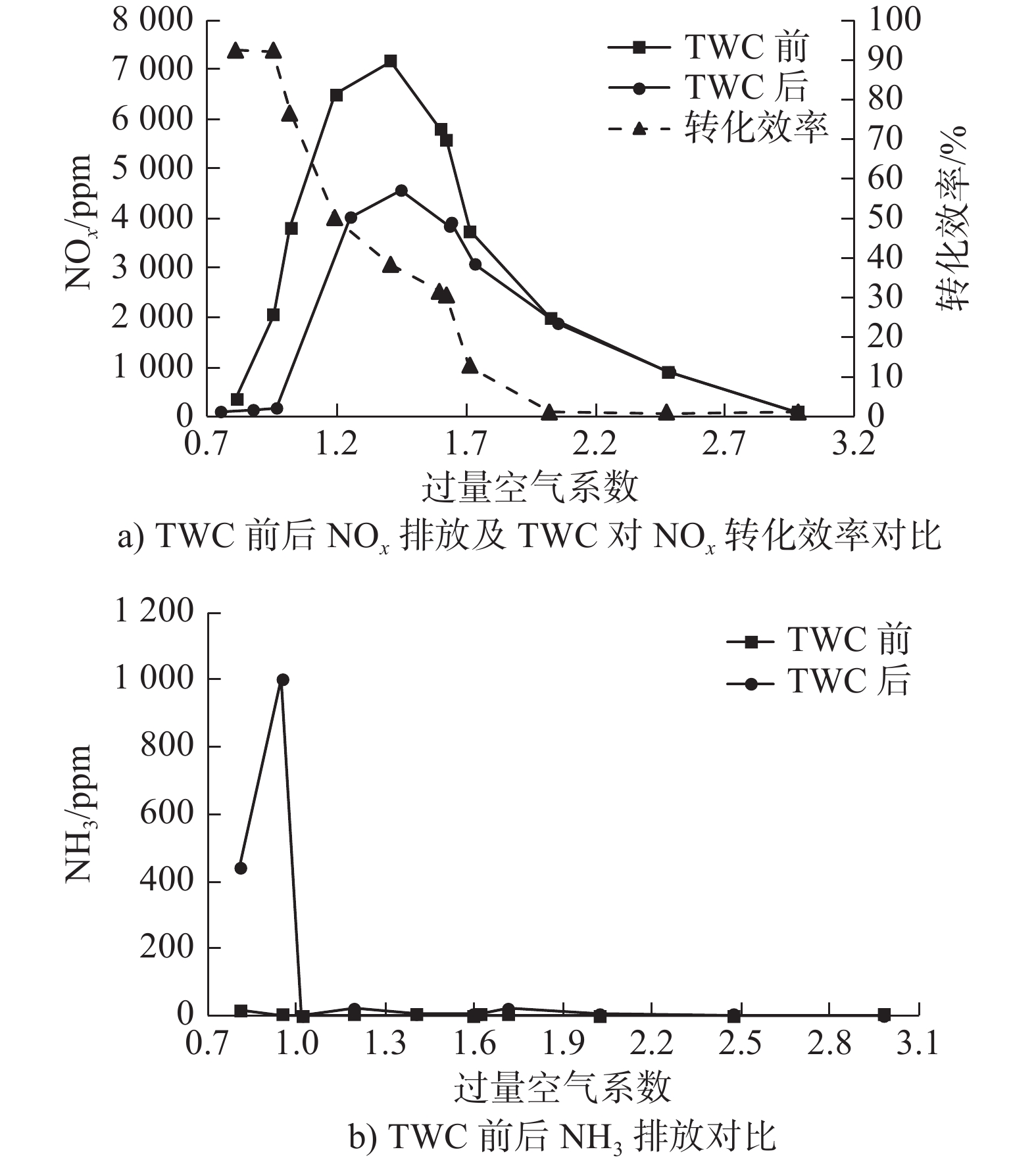
基于一台高压直喷米勒循环汽油机加装氢气喷射系统,试验研究了发动机燃用汽油与氢气时燃烧与排放的差异。结合电子增压器,通过增大过量空气系数,探索氢气发动机超稀薄燃烧模式热效率潜力,分析了汽油机三效催化转化器对氮氧化物转化效率和NH3的影响规律。结果表明:大负荷工况下氢气发动机对爆震较为敏感,采用稀薄燃烧方式可进一步提升氢气发动机有效热效率水平。2 500 r/min转速条件下,缸内平均有效压力(Brake mean effective pressure, BMEP,记为PBME) = 0.8 MPa时,过量空气系数由1.0增大至3.0时,热效率值增幅可达30%,NOx排放降幅可达约98%,且当负荷进一步提升至PBME = 1.1 MPa时,热效率突破43.0%。传统汽油机TWC对氢发动机NOx转化效率在偏浓工况下相对较高,且在偏浓工况下,TWC后会产生大量氨气,当混合气进一步稀释后NH3生成量显著降低。
基于一台高压直喷米勒循环汽油机加装氢气喷射系统,试验研究了发动机燃用汽油与氢气时燃烧与排放的差异。结合电子增压器,通过增大过量空气系数,探索氢气发动机超稀薄燃烧模式热效率潜力,分析了汽油机三效催化转化器对氮氧化物转化效率和NH3的影响规律。结果表明:大负荷工况下氢气发动机对爆震较为敏感,采用稀薄燃烧方式可进一步提升氢气发动机有效热效率水平。2 500 r/min转速条件下,缸内平均有效压力(Brake mean effective pressure, BMEP,记为PBME) = 0.8 MPa时,过量空气系数由1.0增大至3.0时,热效率值增幅可达30%,NOx排放降幅可达约98%,且当负荷进一步提升至PBME = 1.1 MPa时,热效率突破43.0%。传统汽油机TWC对氢发动机NOx转化效率在偏浓工况下相对较高,且在偏浓工况下,TWC后会产生大量氨气,当混合气进一步稀释后NH3生成量显著降低。
2024, 43(5): 756-764.
doi: 10.13433/j.cnki.1003-8728.20220293
摘要:
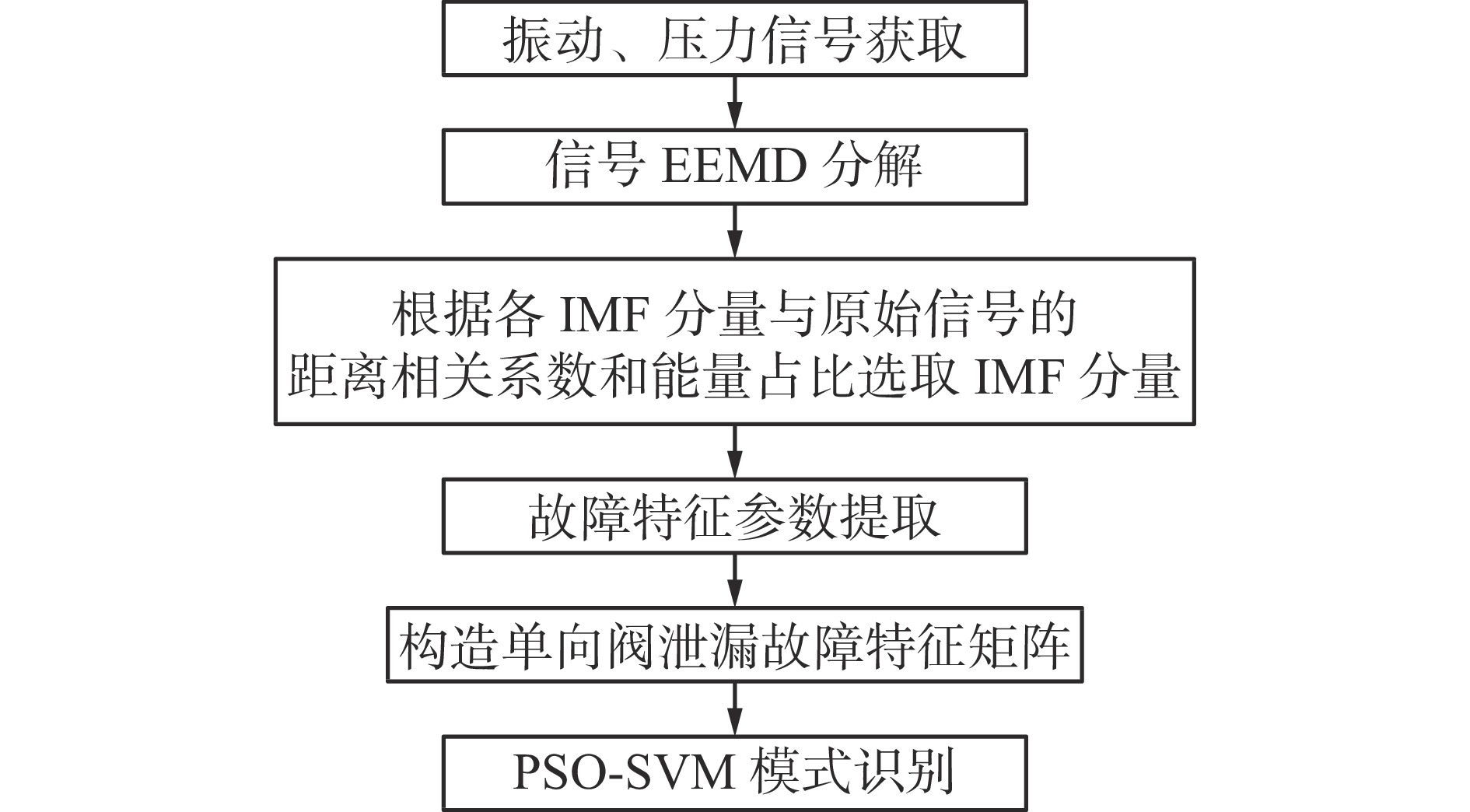
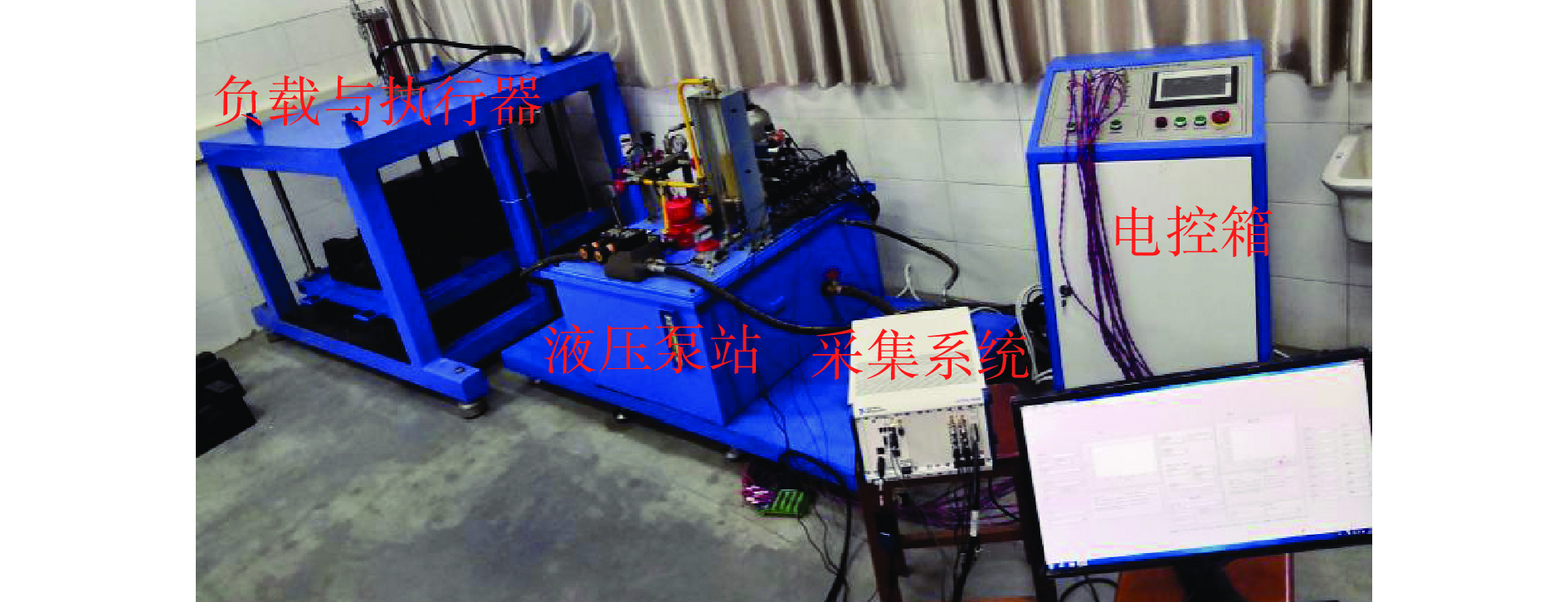
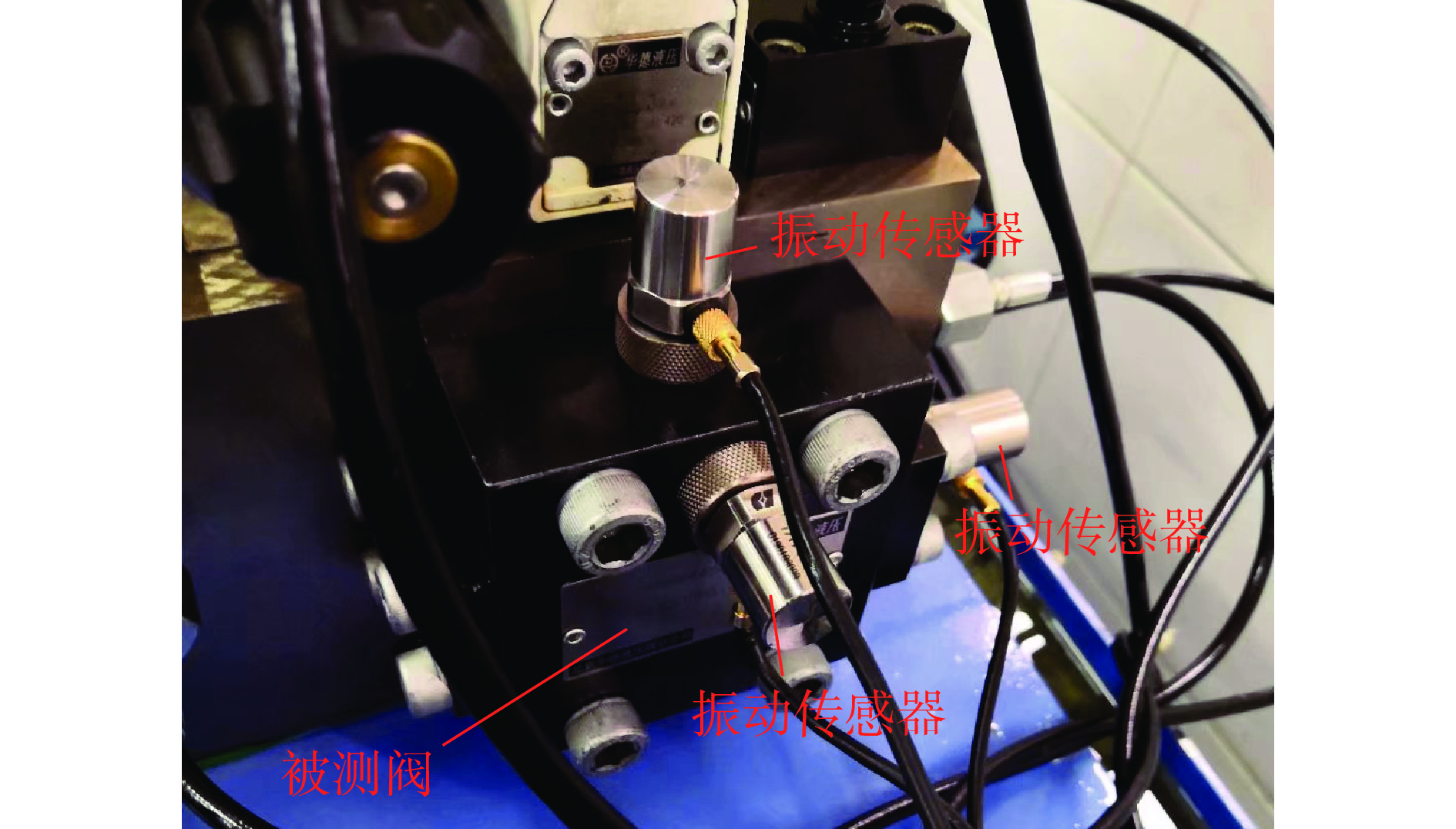
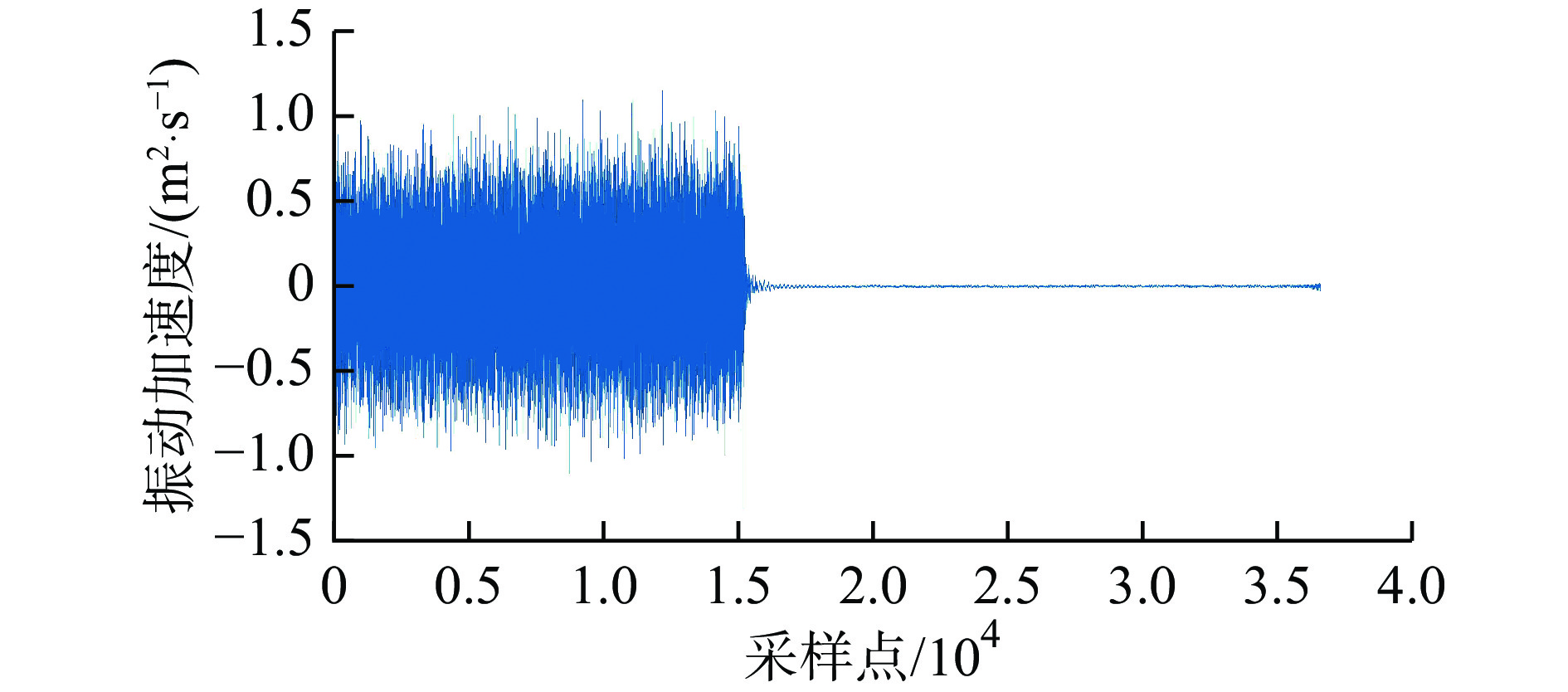
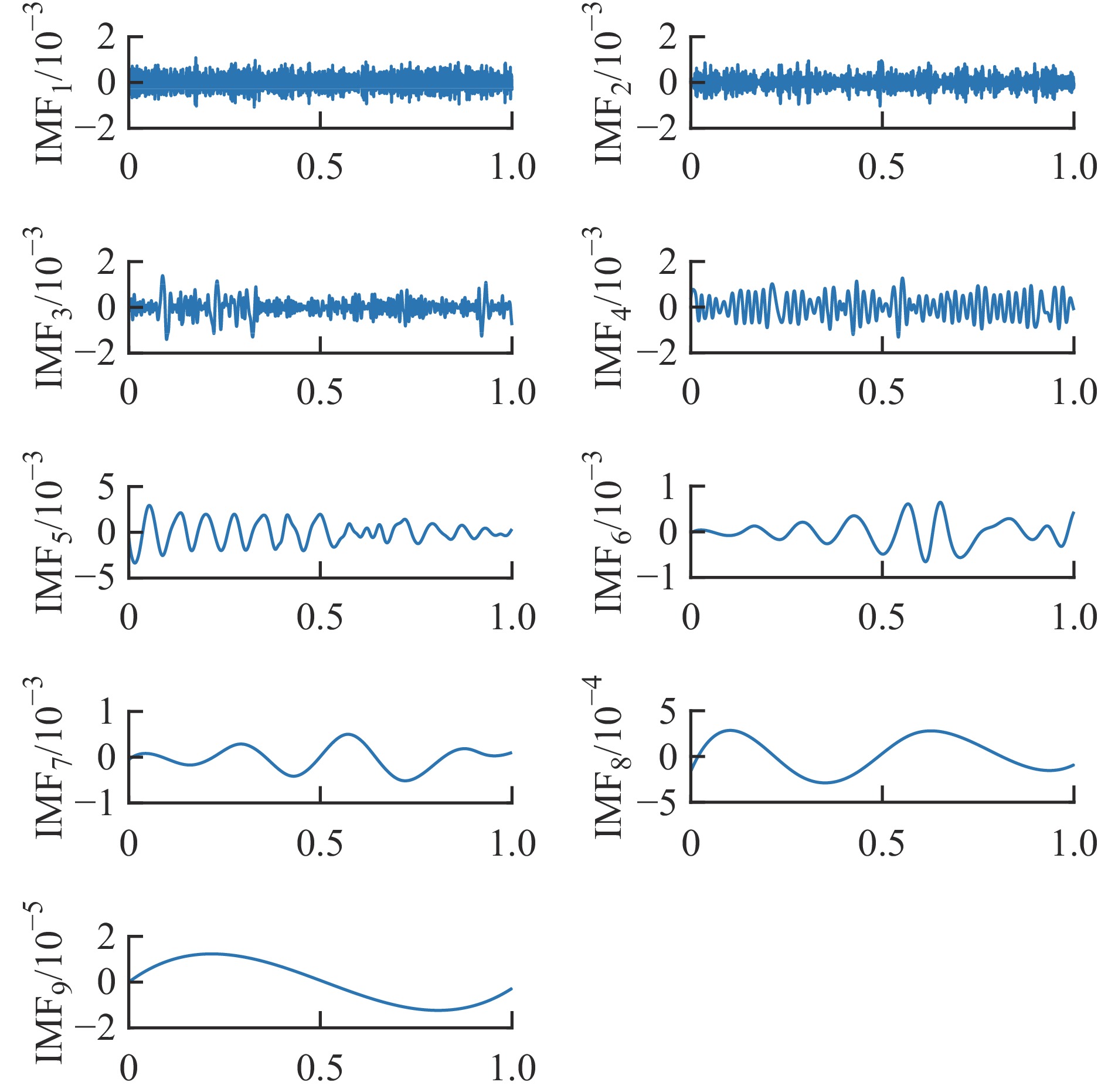
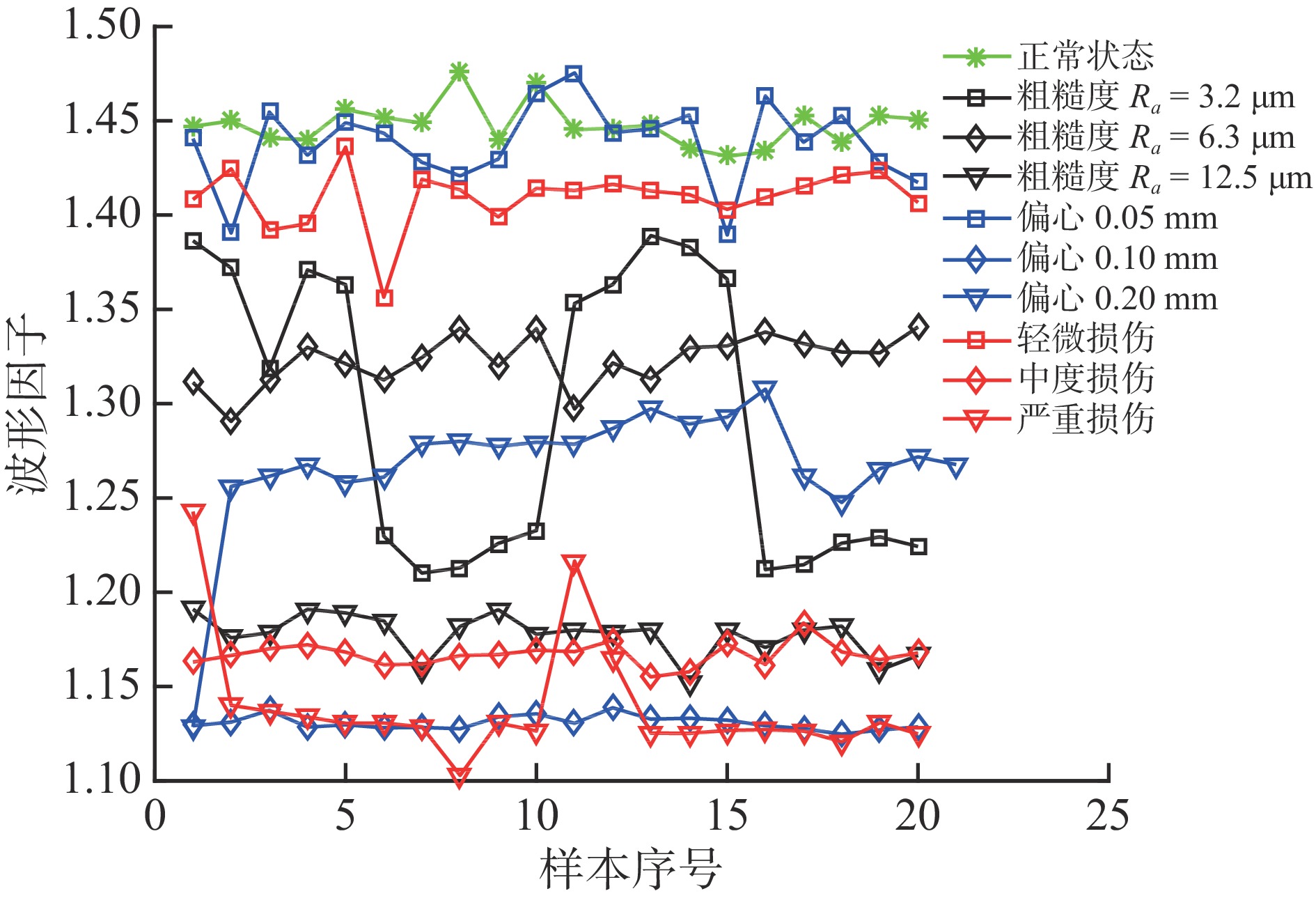
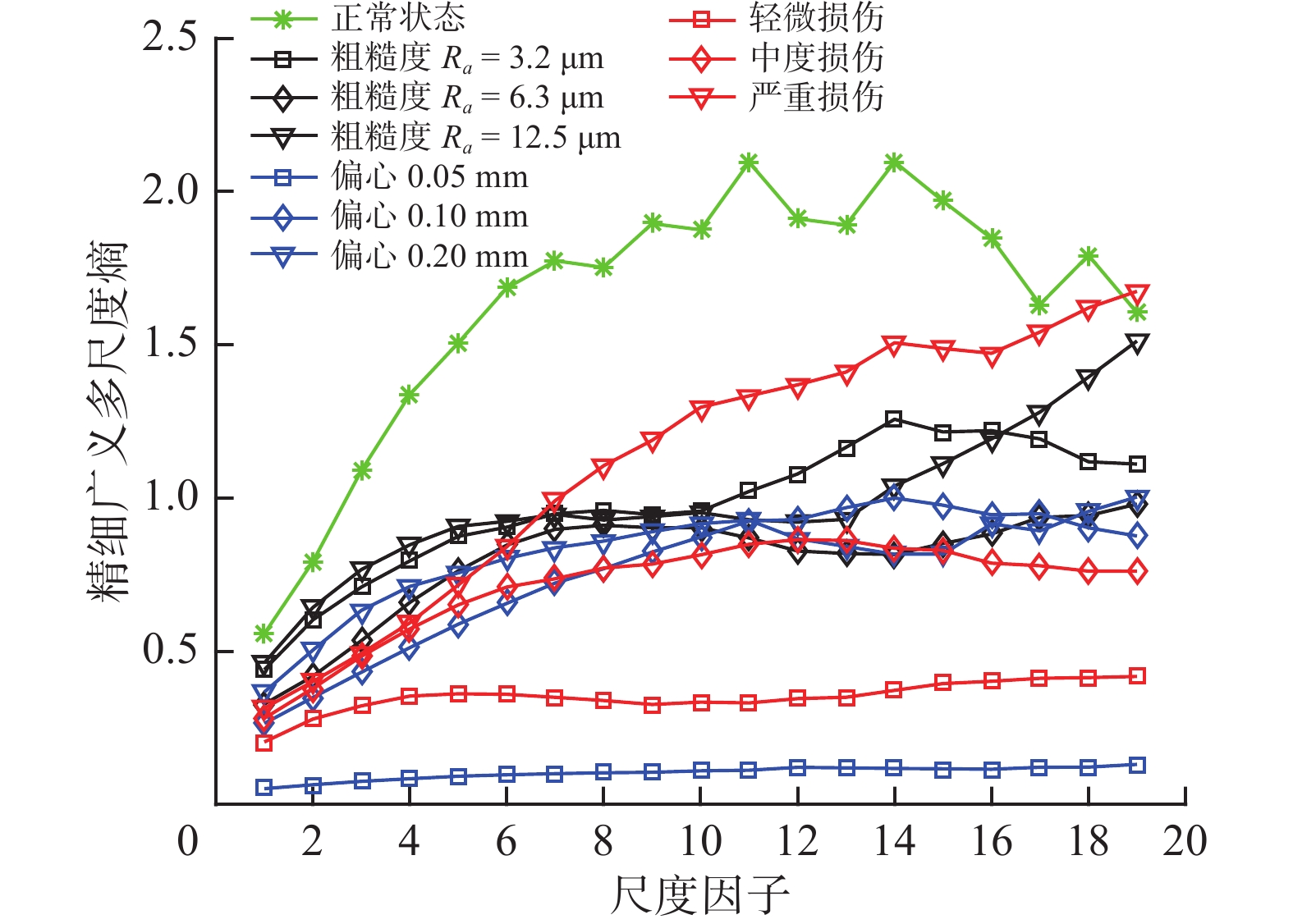
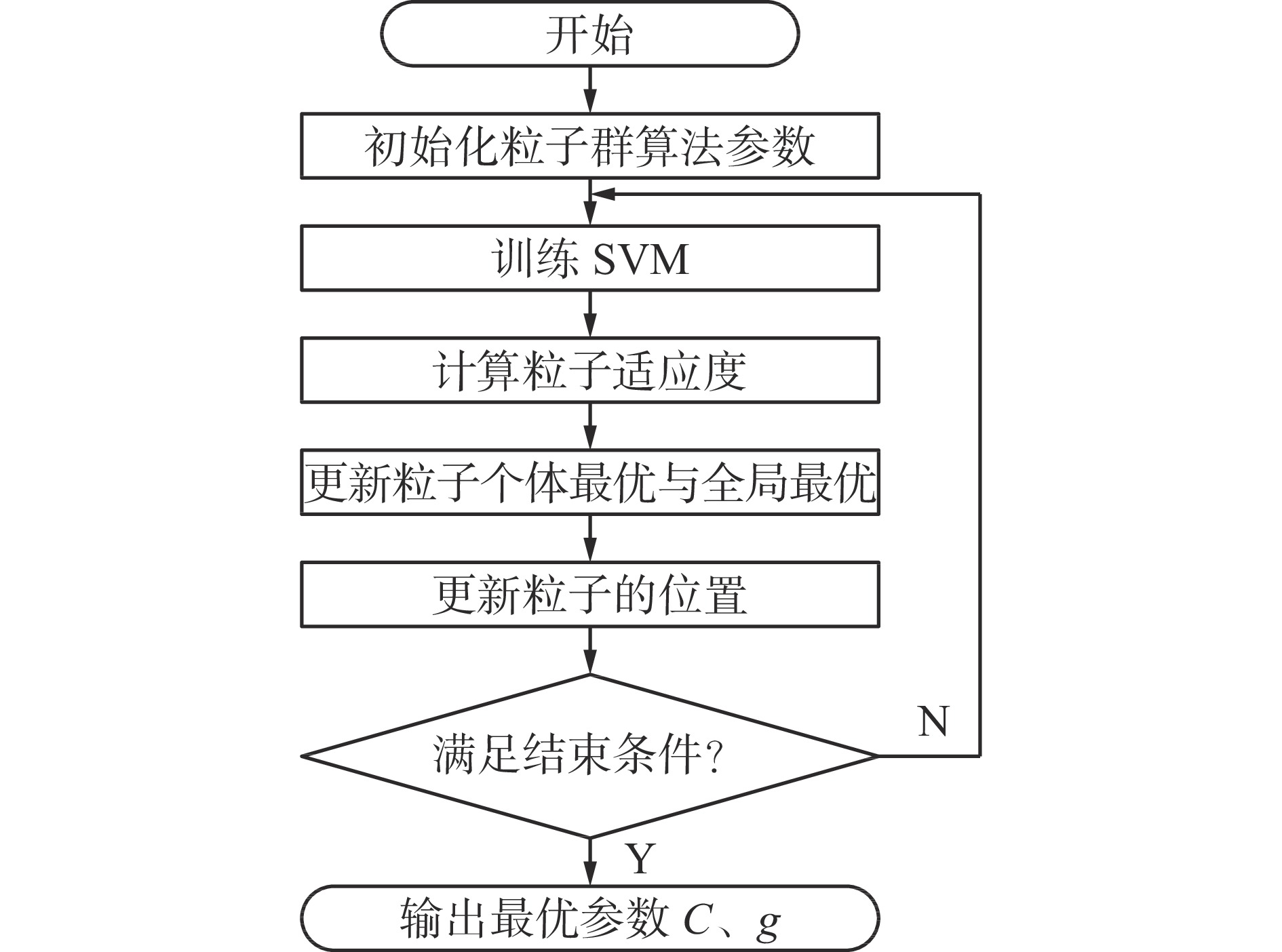
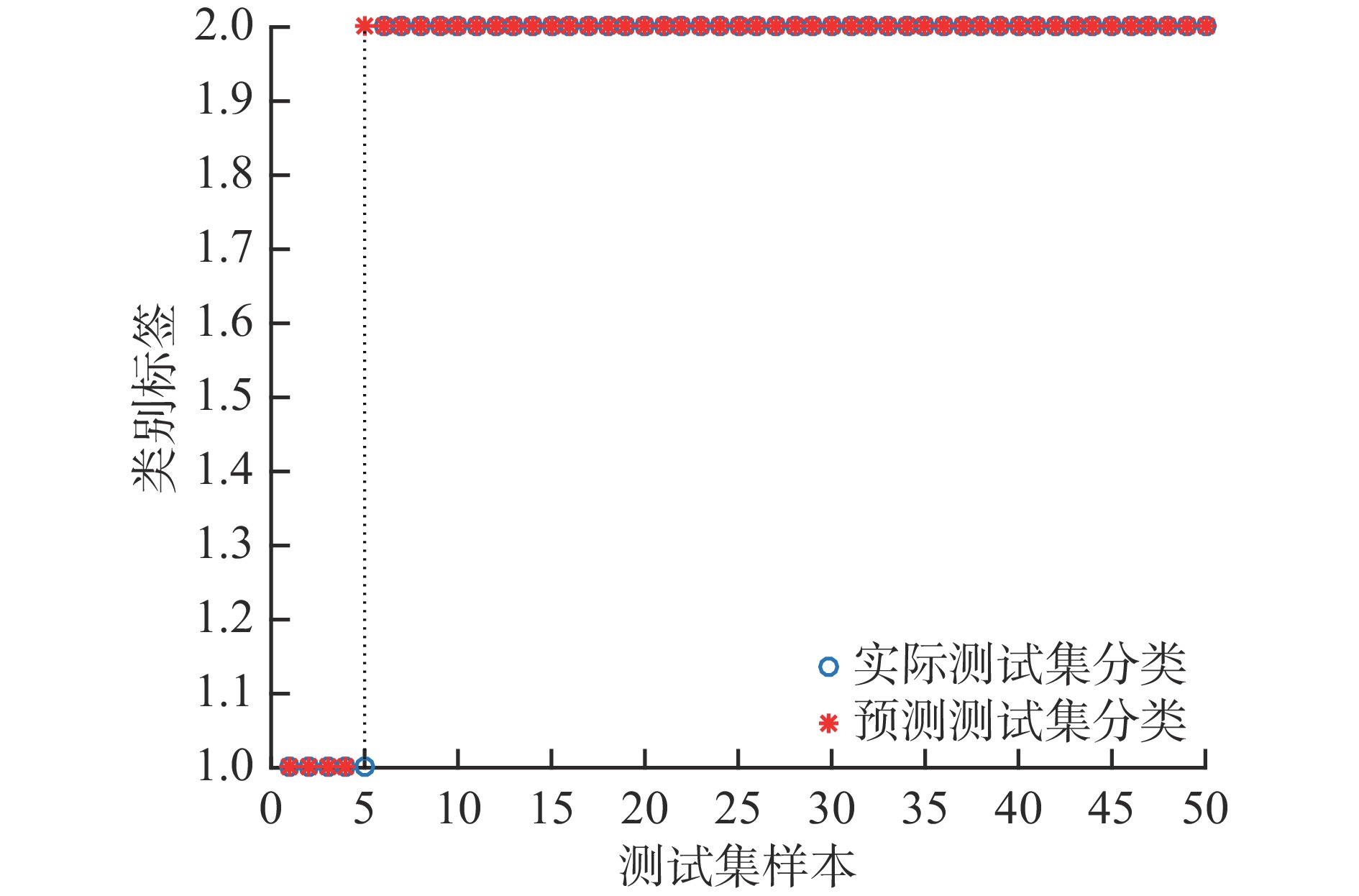
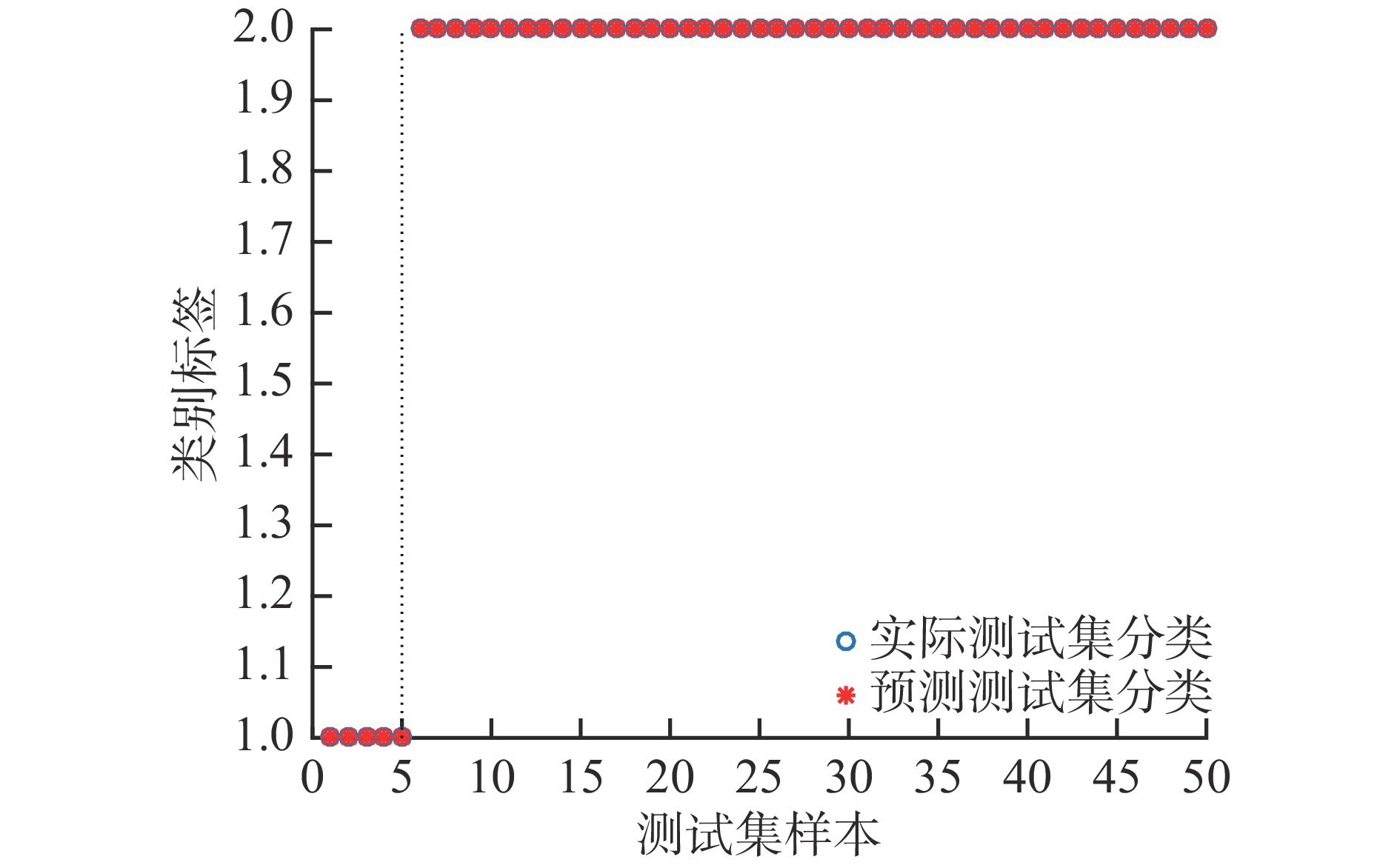
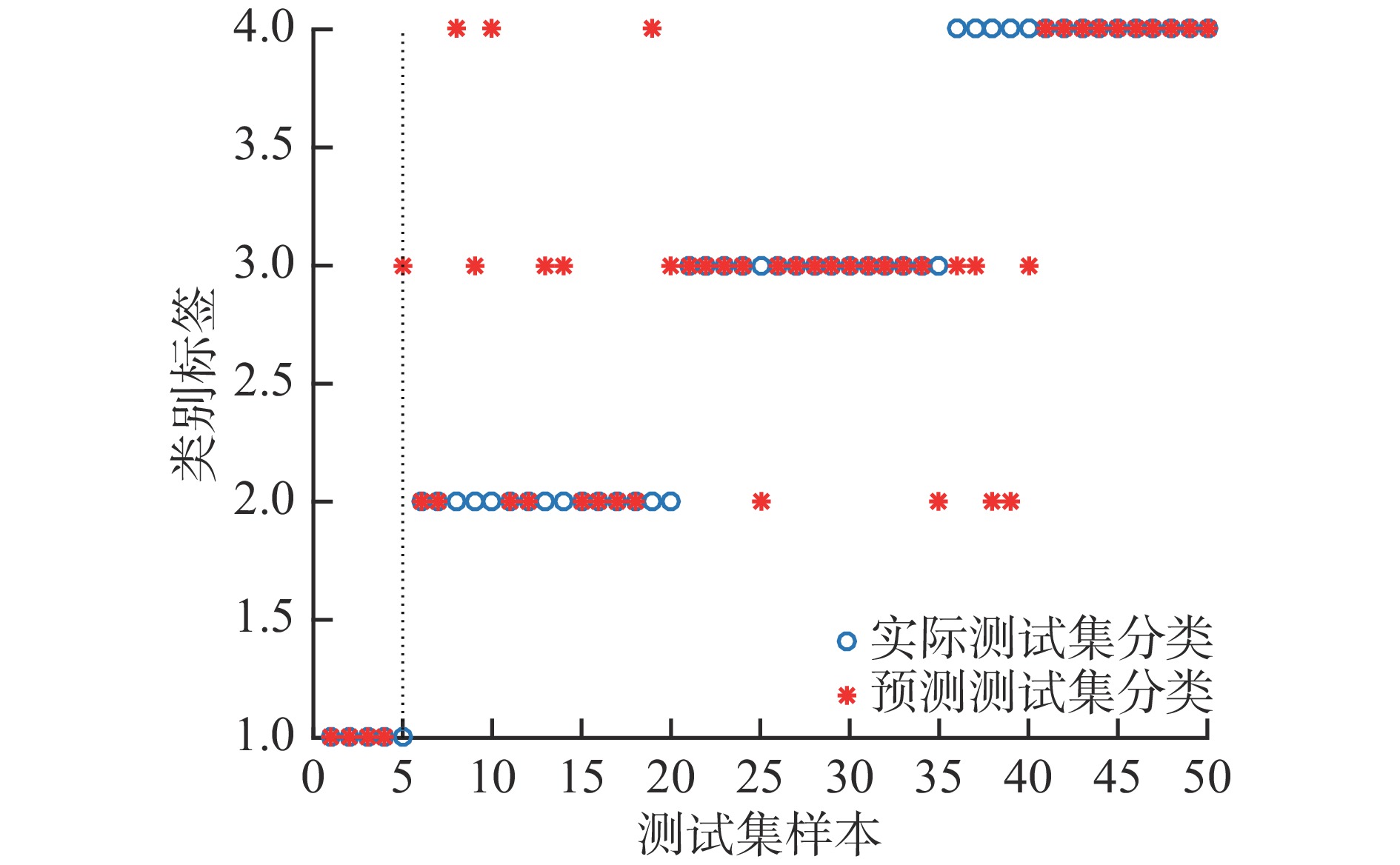
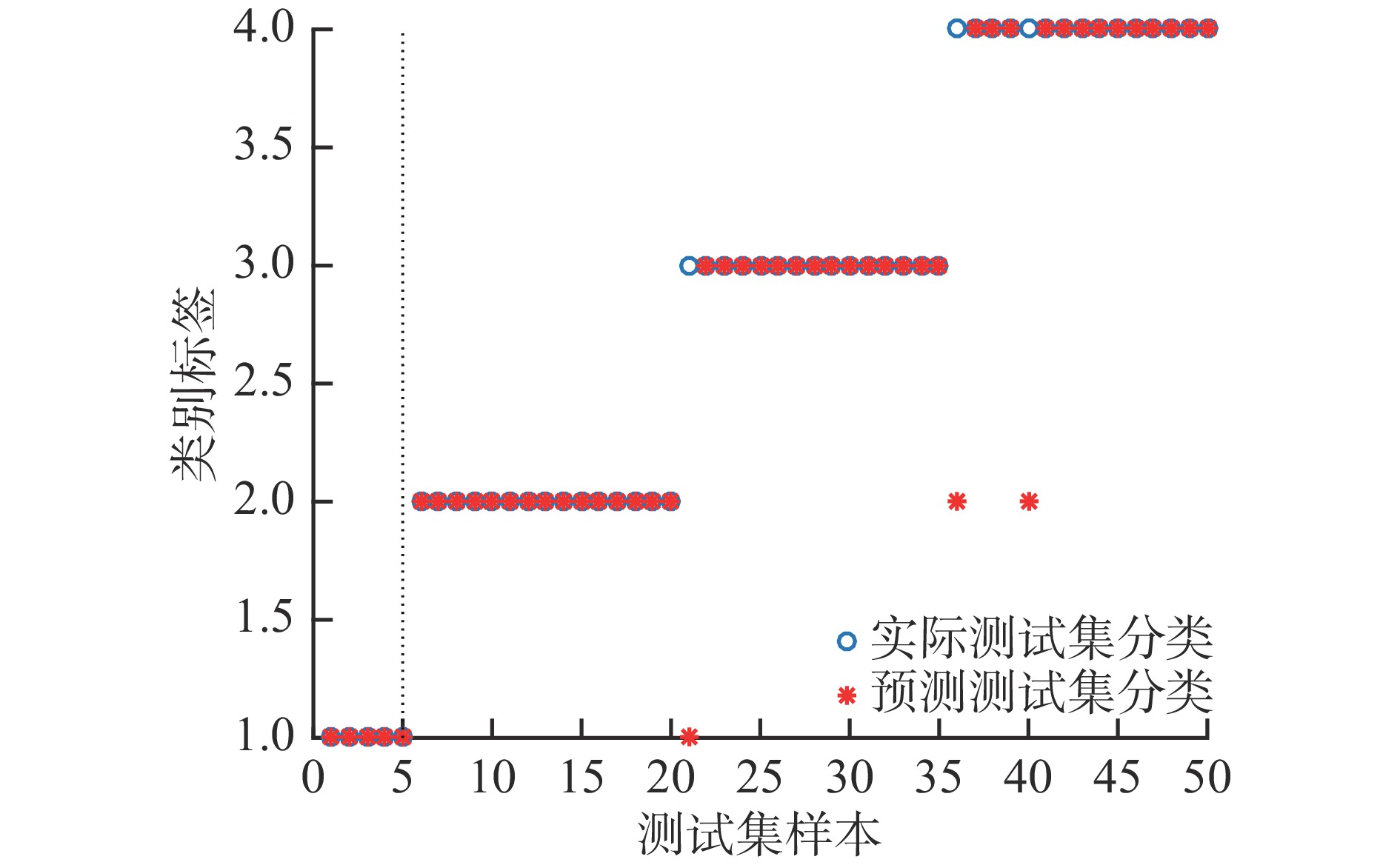
单向阀被广泛应用于工程机械、农业机械、军事车辆液压系统中,泄漏是单向阀的常见故障。本文提出了一种基于时频分解的多源多域、多尺度特征提取与机器学习的单向阀微弱内泄漏故障诊断方法。对4类微弱内泄漏故障的振动信号和压力信号进行经验模态分解;采用时域、频域以及时频域的奇异值、波形因子、熵值等方法进行特征提取并构造故障特征向量;基于粒子群-支持向量机进行单向阀内泄漏故障模式识别。实验结果表明该方法能有效地检测单向阀内泄漏,模式识别准确率达到90%以上。本文为单向阀内泄漏量预测研究奠定了基础,具有较好的工程应用前景。
单向阀被广泛应用于工程机械、农业机械、军事车辆液压系统中,泄漏是单向阀的常见故障。本文提出了一种基于时频分解的多源多域、多尺度特征提取与机器学习的单向阀微弱内泄漏故障诊断方法。对4类微弱内泄漏故障的振动信号和压力信号进行经验模态分解;采用时域、频域以及时频域的奇异值、波形因子、熵值等方法进行特征提取并构造故障特征向量;基于粒子群-支持向量机进行单向阀内泄漏故障模式识别。实验结果表明该方法能有效地检测单向阀内泄漏,模式识别准确率达到90%以上。本文为单向阀内泄漏量预测研究奠定了基础,具有较好的工程应用前景。

2024, 43(5): 765-772.
doi: 10.13433/j.cnki.1003-8728.20230045
摘要:
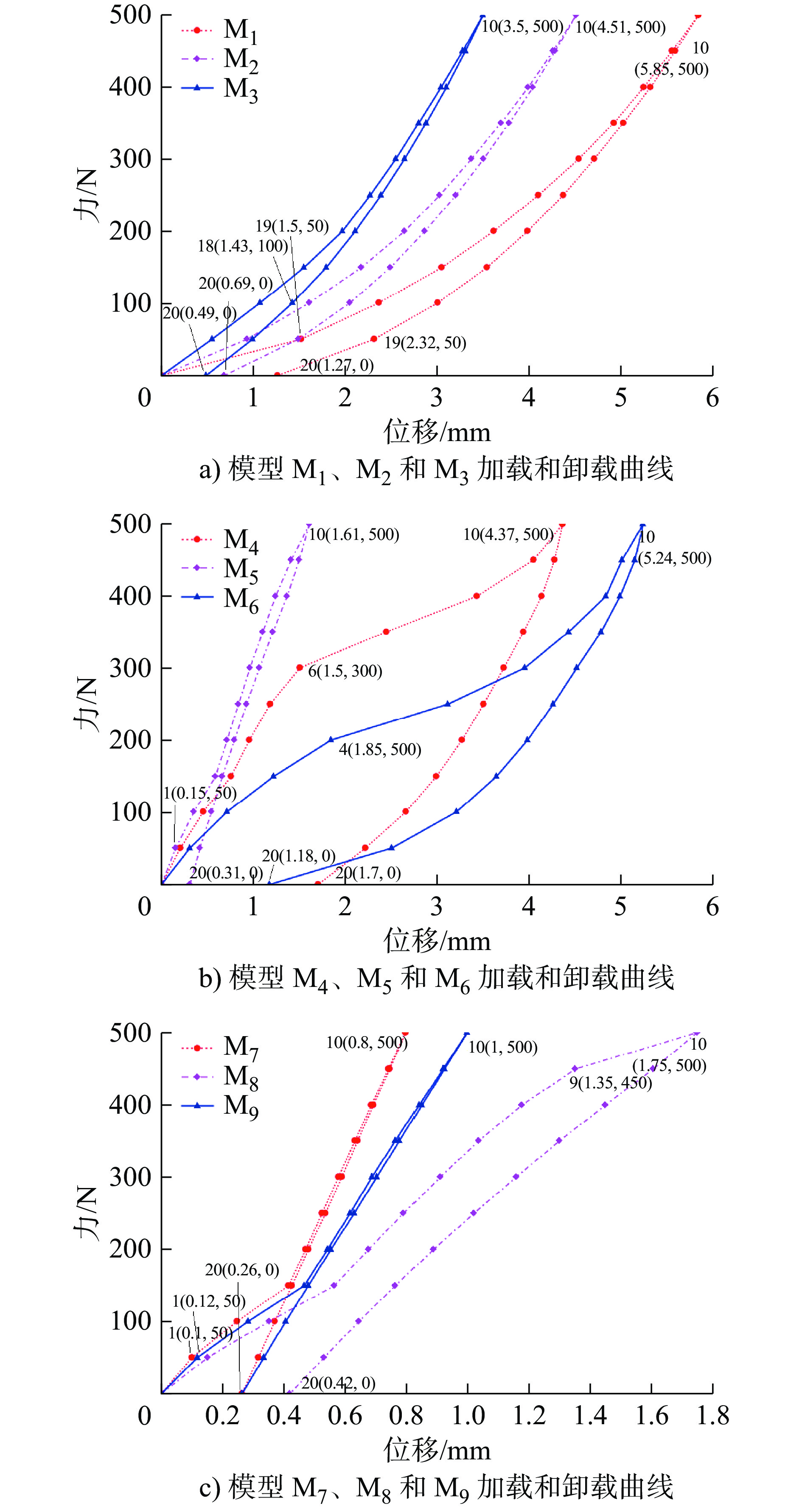
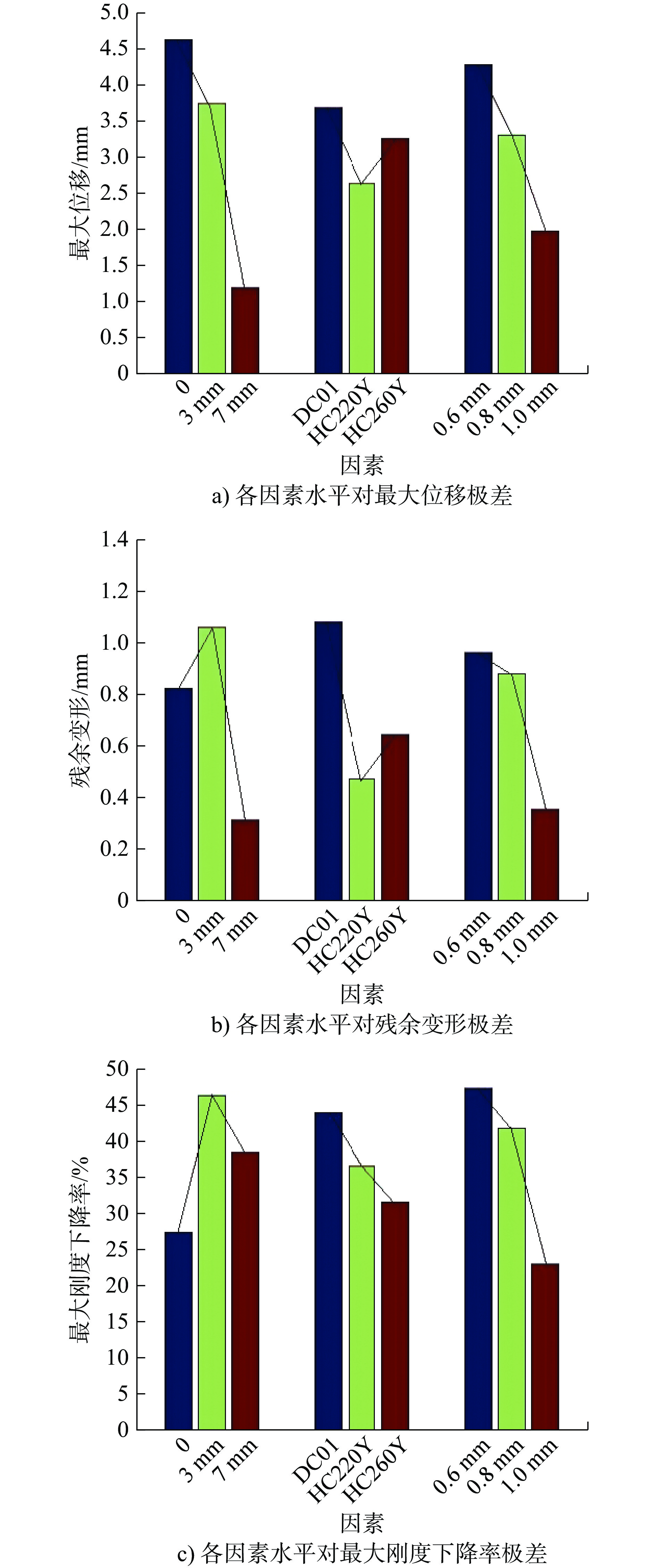
针对某白车身中通道地板存在的抗凹问题,建立有限元模型并计算;通过计算得到地板抗凹性能指标数值;并将试验结果和有限元模型计算结果进行对比,两者有较好的一致性,有限元分析方法有效;用正交试验搜寻地板最优抗凹性能参数组合,以横向加强筋深度、材料牌号和钣金厚度为研究因素,每个因素设计3个水平,建立正交表L9(34)并完成9组有限元模型计算;对分析结果进行方差和极差分析,得到各因素水平对地板各抗凹性能指标影响,最终得到最优参数组合。本文研究结果为中通道地板抗凹性能设计提供参考依据,对工程应用有较大意义。
针对某白车身中通道地板存在的抗凹问题,建立有限元模型并计算;通过计算得到地板抗凹性能指标数值;并将试验结果和有限元模型计算结果进行对比,两者有较好的一致性,有限元分析方法有效;用正交试验搜寻地板最优抗凹性能参数组合,以横向加强筋深度、材料牌号和钣金厚度为研究因素,每个因素设计3个水平,建立正交表L9(34)并完成9组有限元模型计算;对分析结果进行方差和极差分析,得到各因素水平对地板各抗凹性能指标影响,最终得到最优参数组合。本文研究结果为中通道地板抗凹性能设计提供参考依据,对工程应用有较大意义。




2024, 43(5): 773-780.
doi: 10.13433/j.cnki.1003-8728.20230036
摘要:
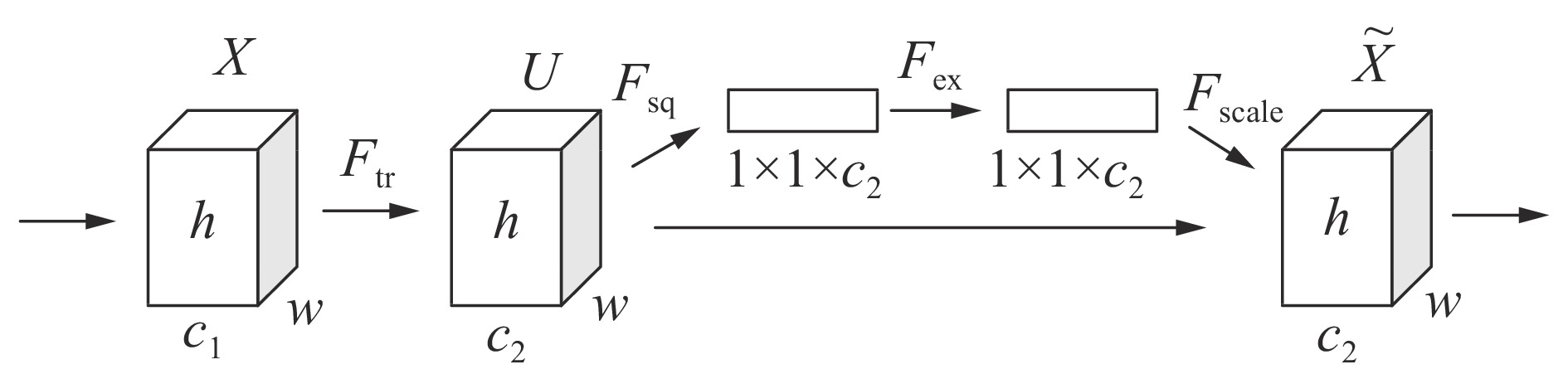
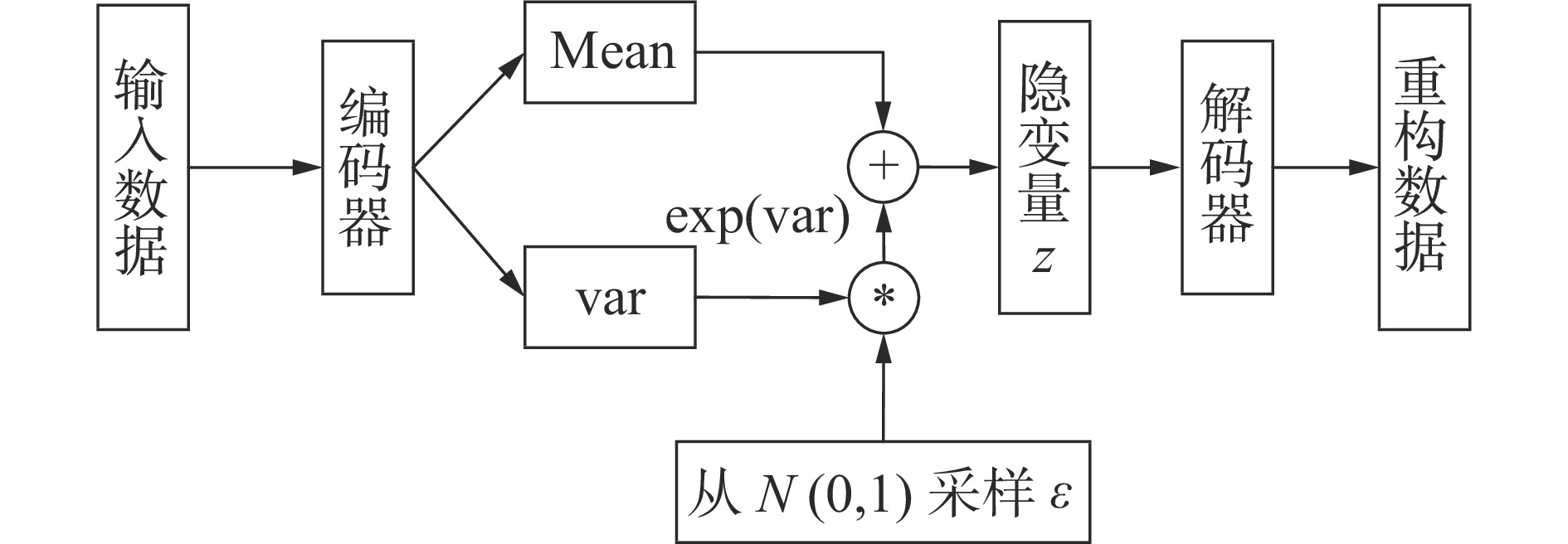
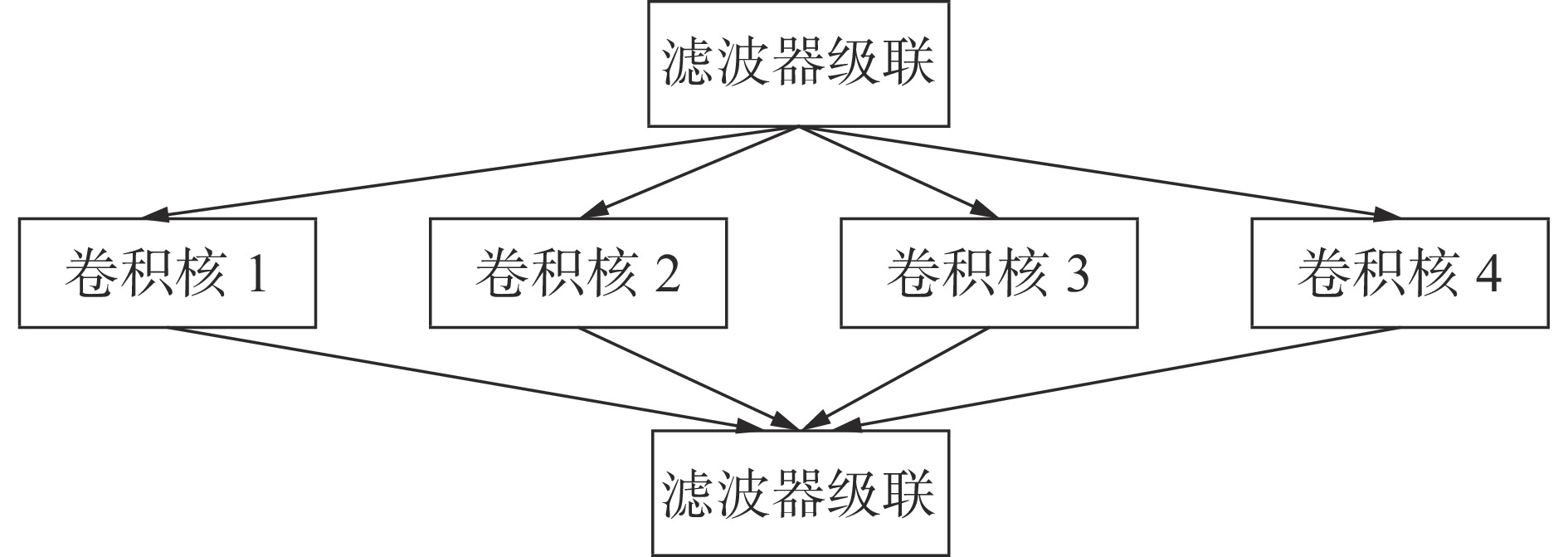
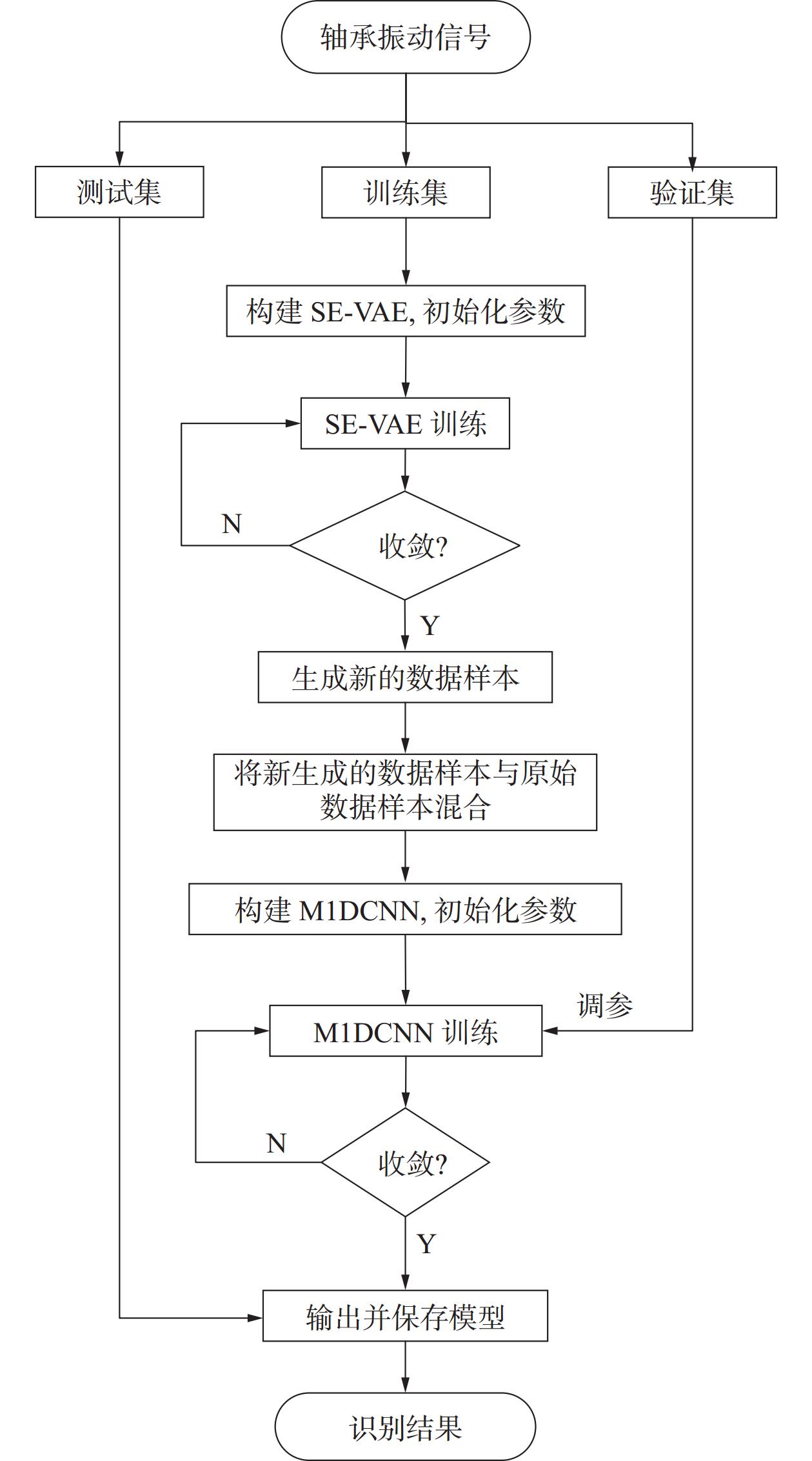
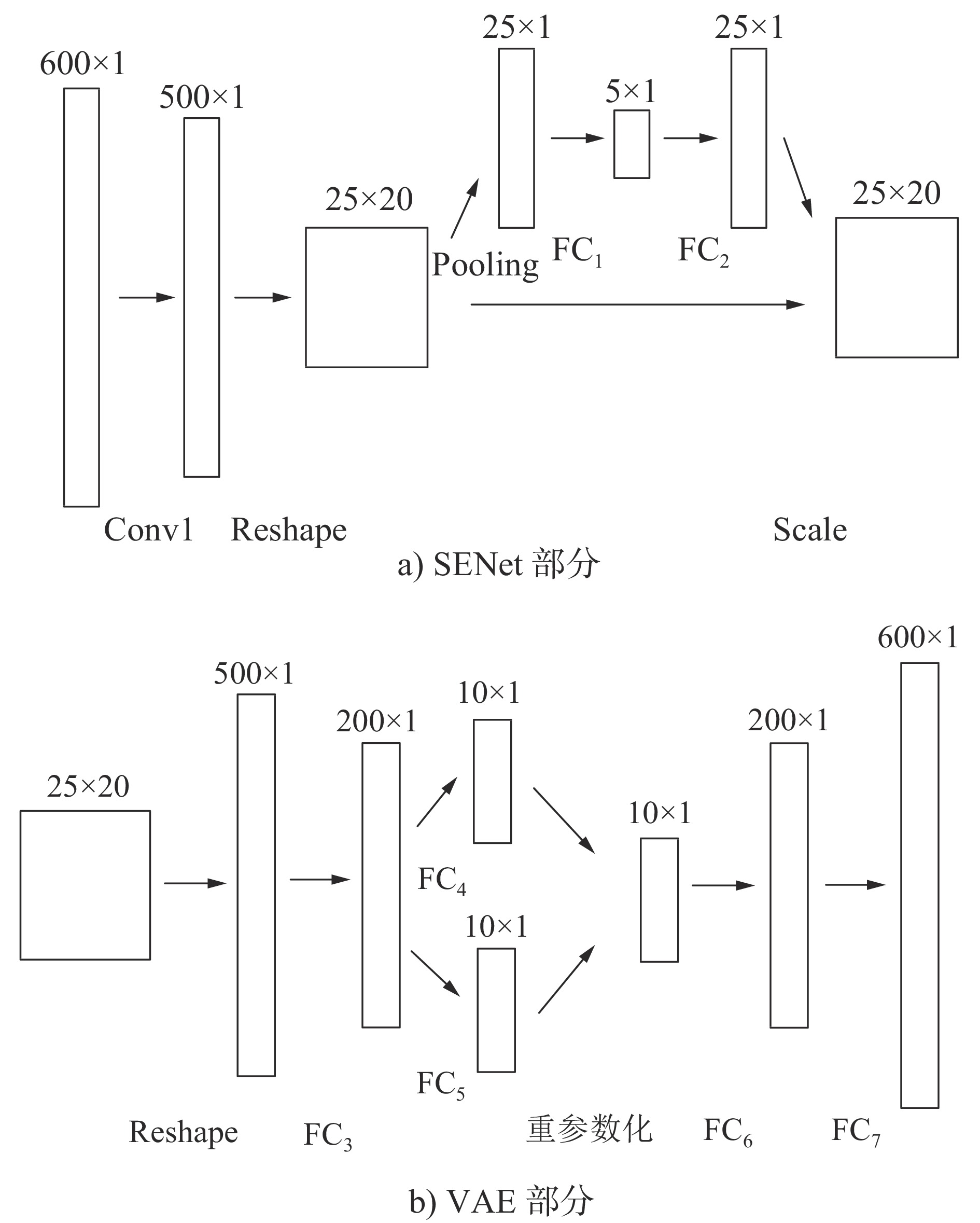
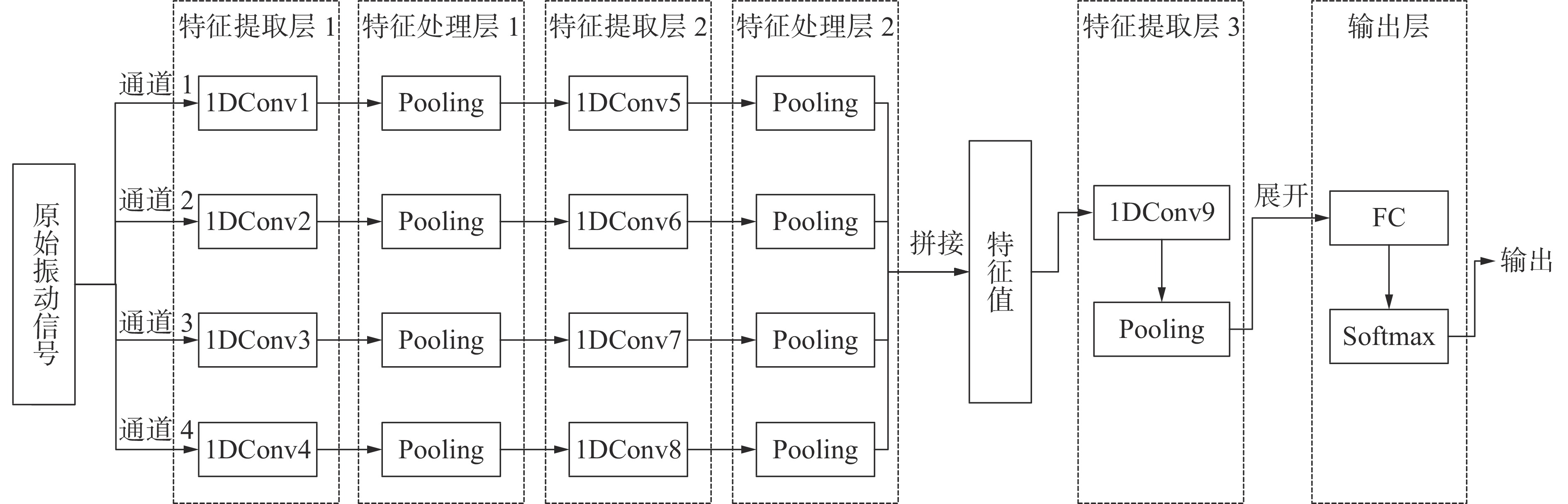
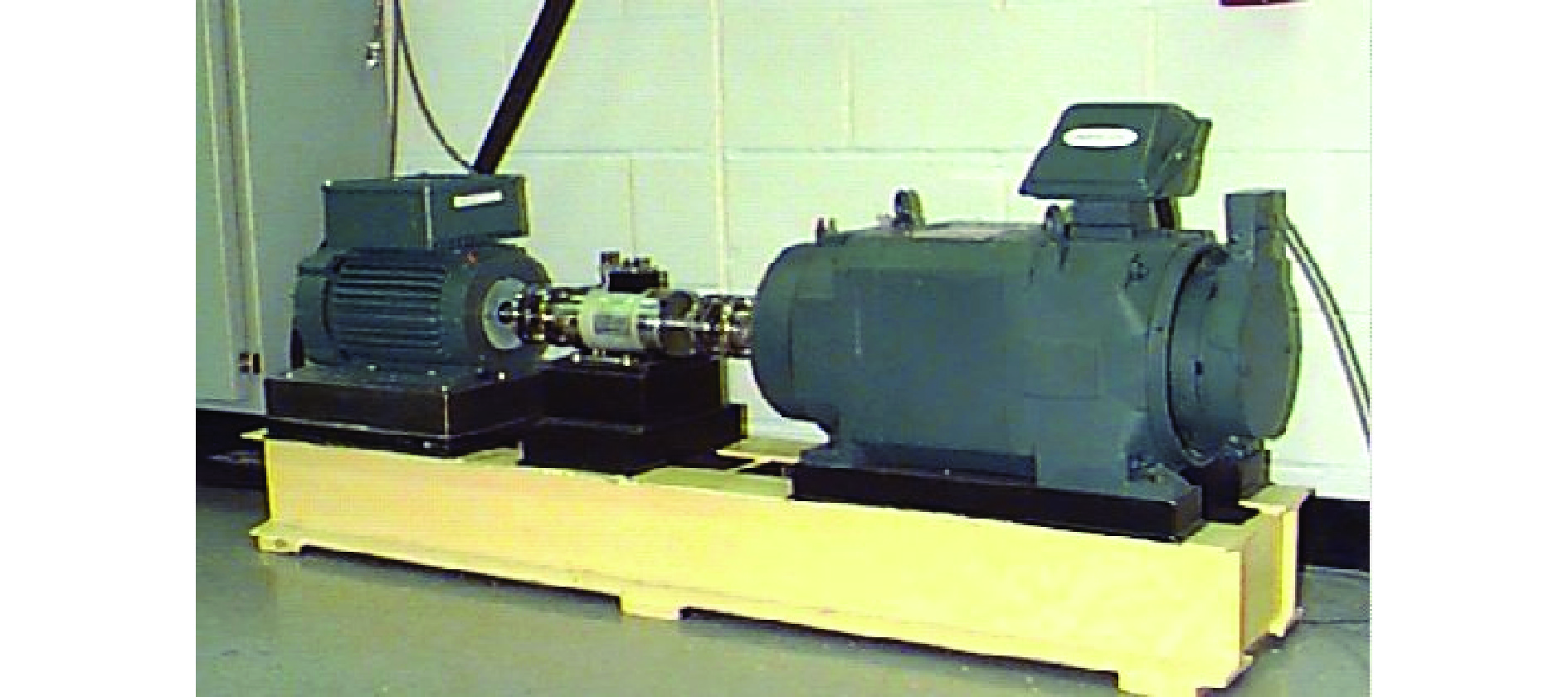
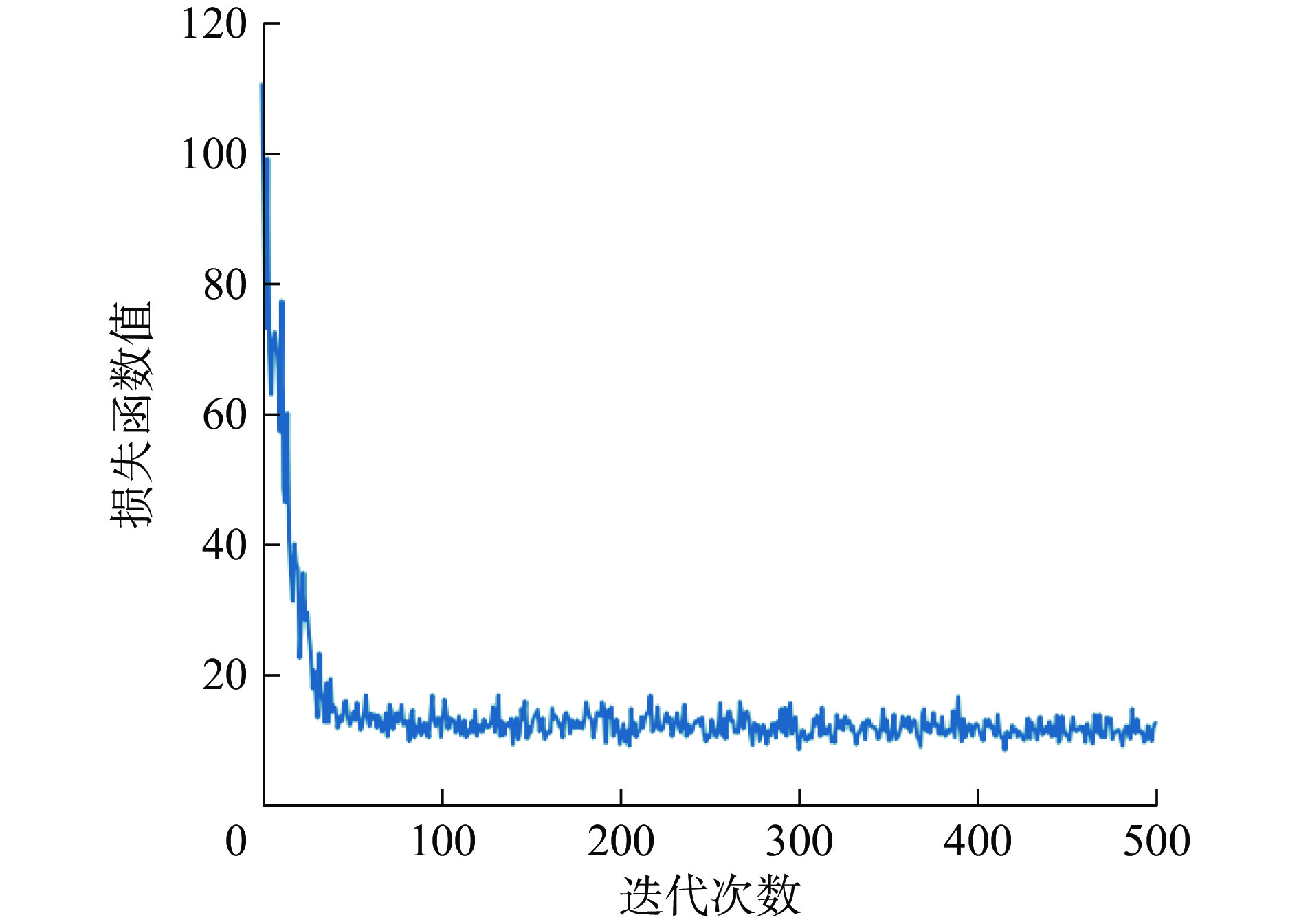
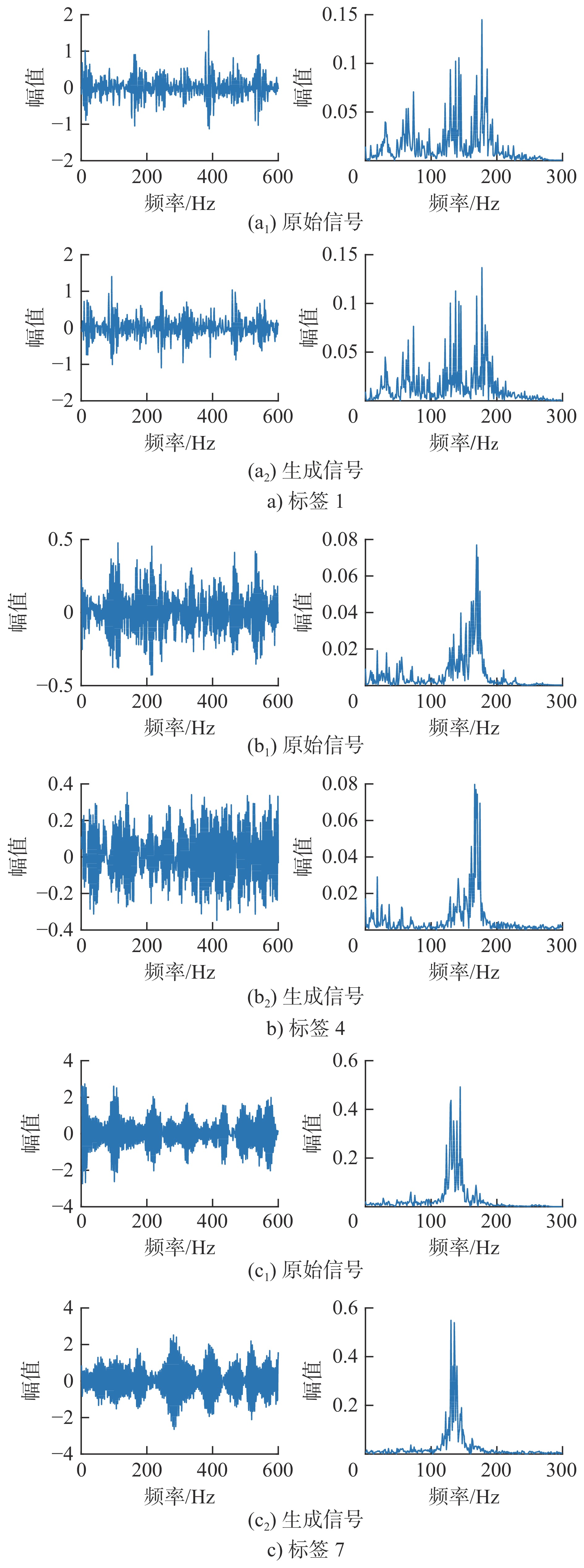
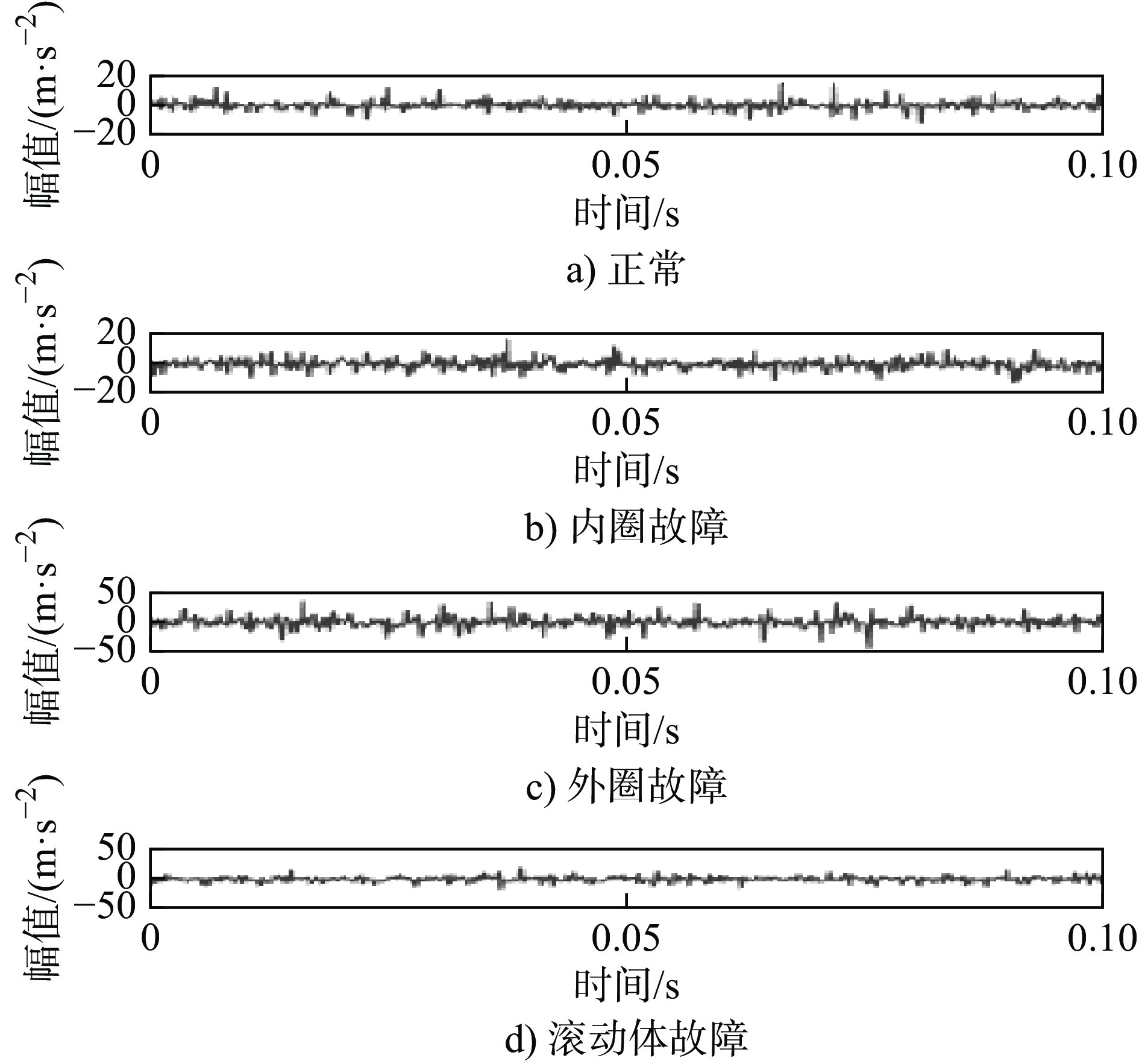
针对轴承故障诊断中故障样本数量少导致诊断正确率低的问题,提出了一种基于注意力机制变分自编码器(SE-VAE)和多尺度一维卷积神经网络(M1DCNN)的轴承故障诊断方法。将轴承数据集的训练集输入到SE-VAE中进行训练,生成与训练样本分布相似的生成样本,并添加到训练集中增加训练集的样本数量。将扩充后的训练集输入到M1DCNN中进行训练,随后将训练好的模型应用于测试集,输出故障诊断结果。实验结果表明,所提方法能够在不同负载的小样本轴承故障数据集上取得较好的故障诊断准确率。
针对轴承故障诊断中故障样本数量少导致诊断正确率低的问题,提出了一种基于注意力机制变分自编码器(SE-VAE)和多尺度一维卷积神经网络(M1DCNN)的轴承故障诊断方法。将轴承数据集的训练集输入到SE-VAE中进行训练,生成与训练样本分布相似的生成样本,并添加到训练集中增加训练集的样本数量。将扩充后的训练集输入到M1DCNN中进行训练,随后将训练好的模型应用于测试集,输出故障诊断结果。实验结果表明,所提方法能够在不同负载的小样本轴承故障数据集上取得较好的故障诊断准确率。

2024, 43(5): 781-789.
doi: 10.13433/j.cnki.1003-8728.20220304
摘要:
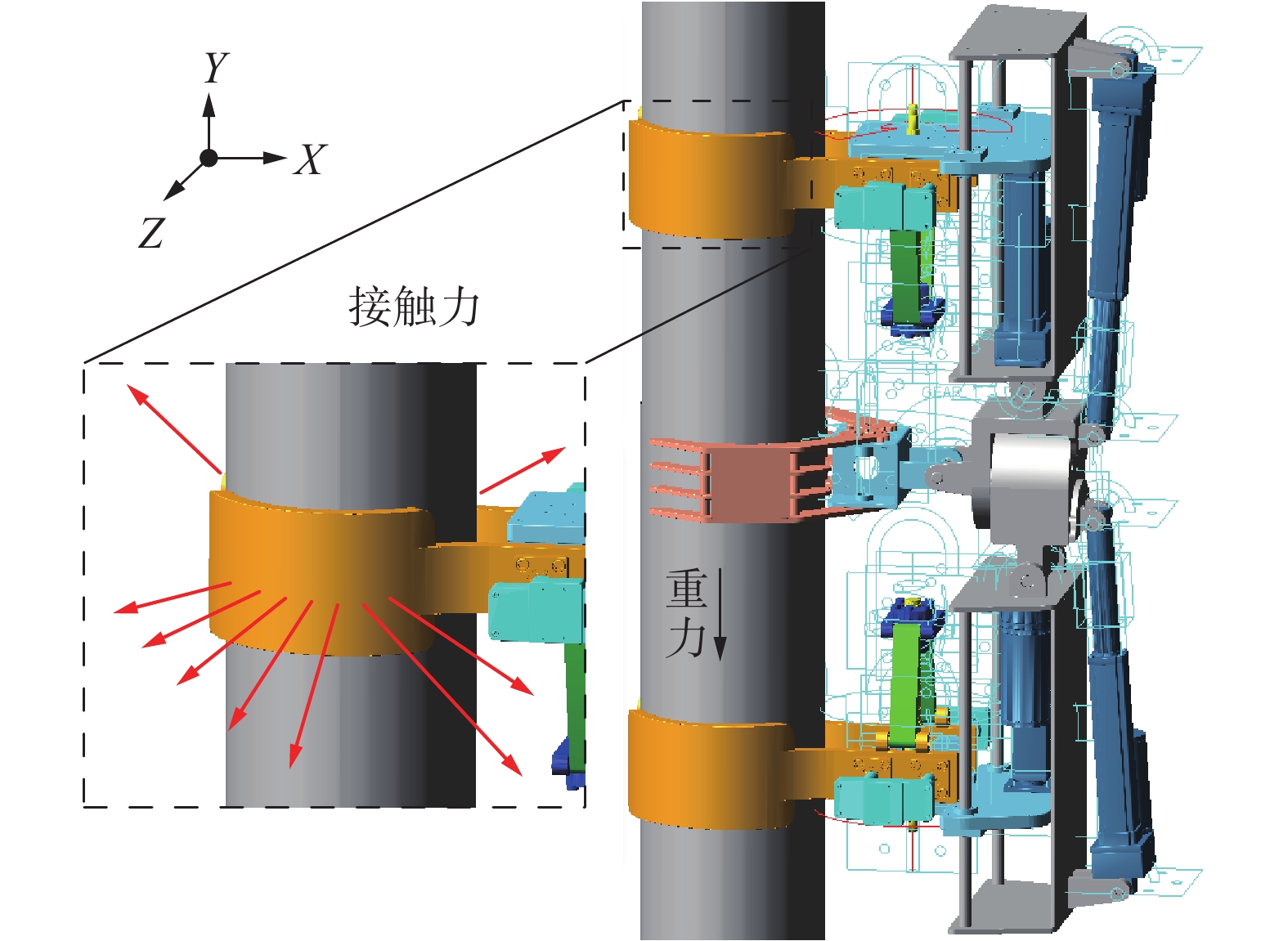
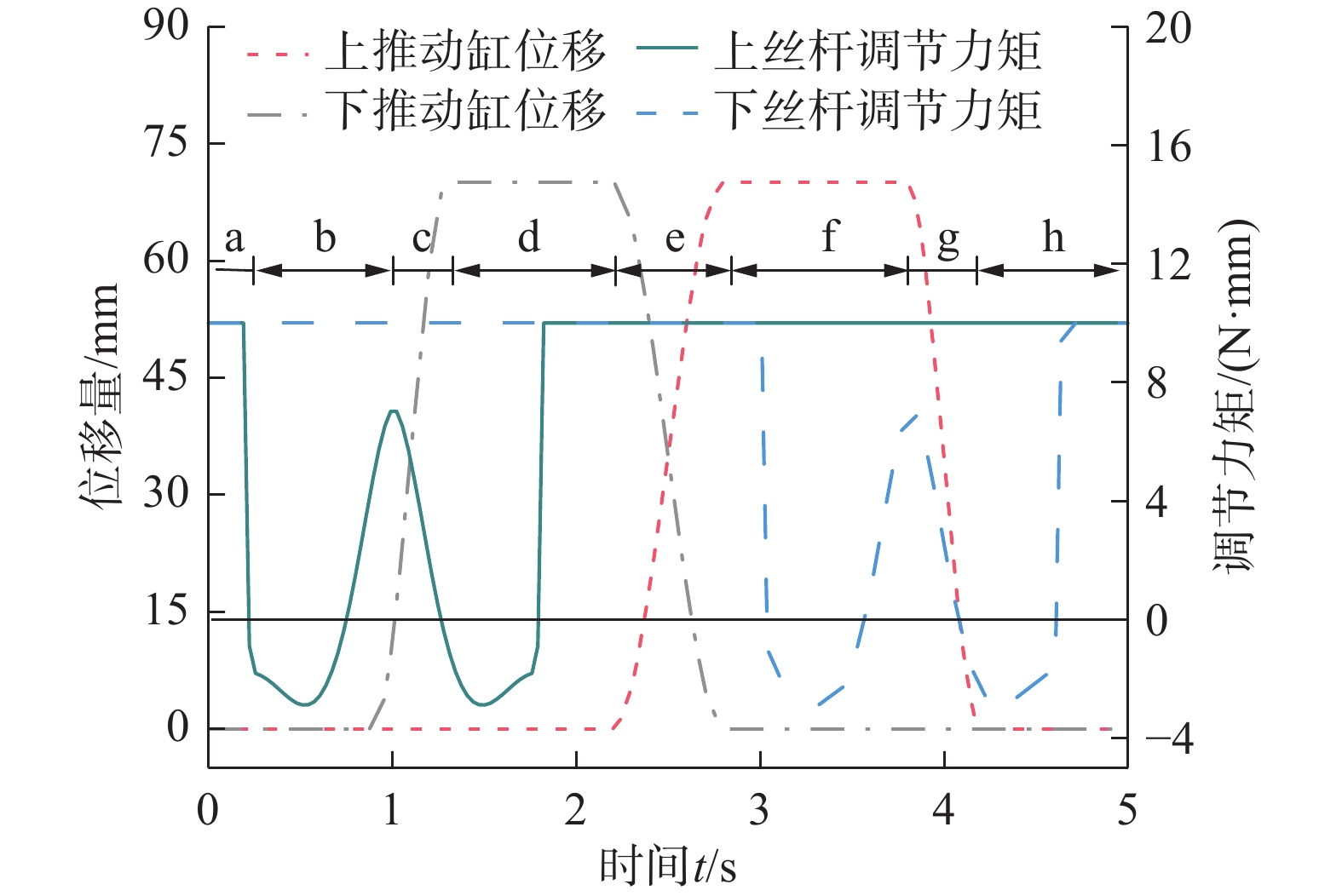
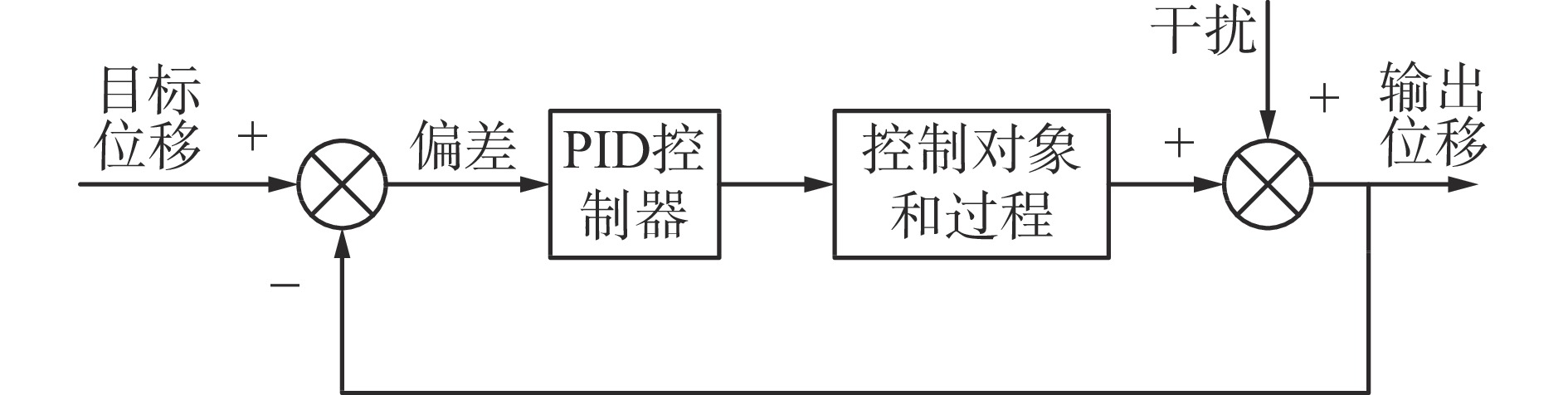
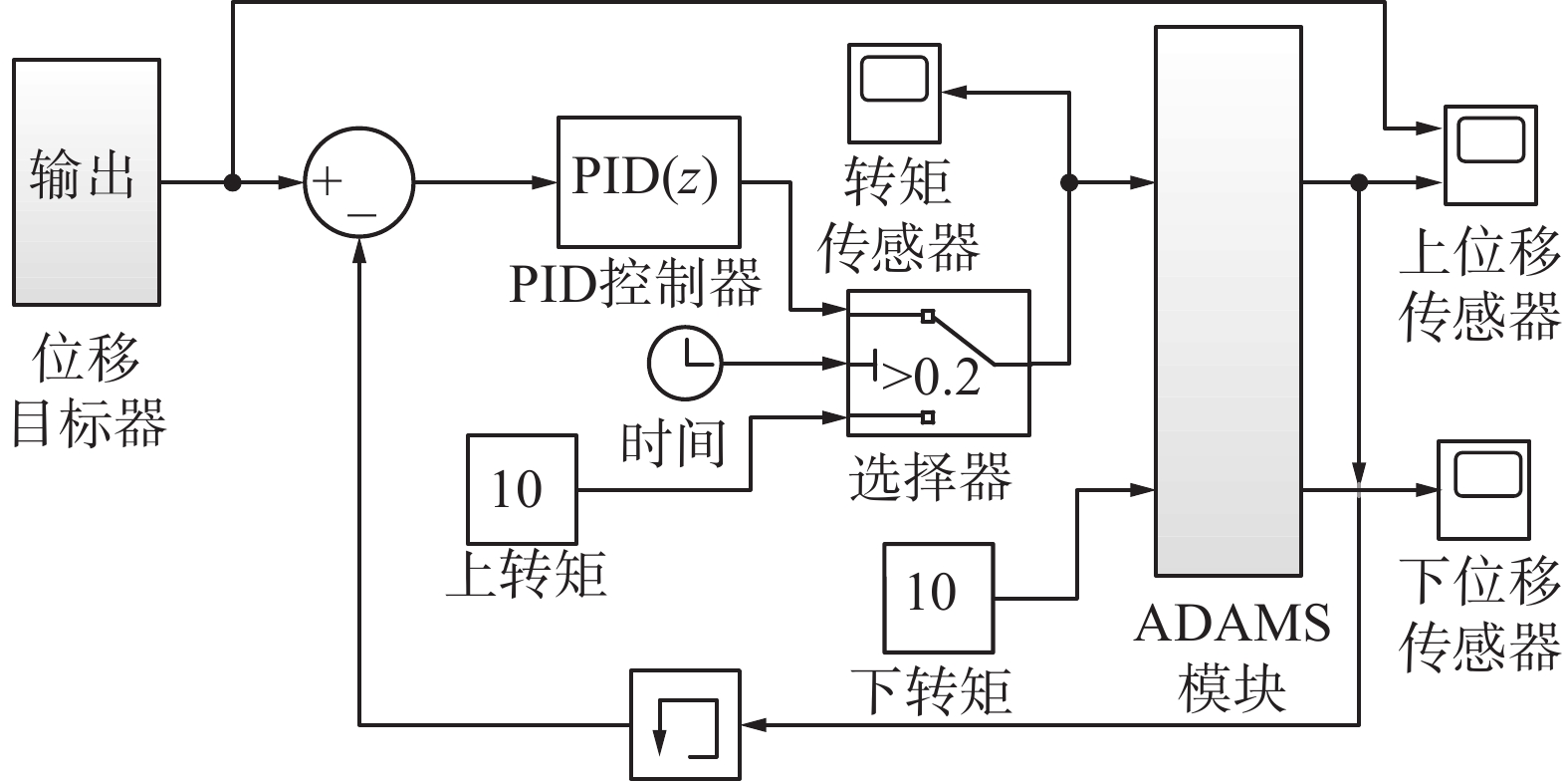
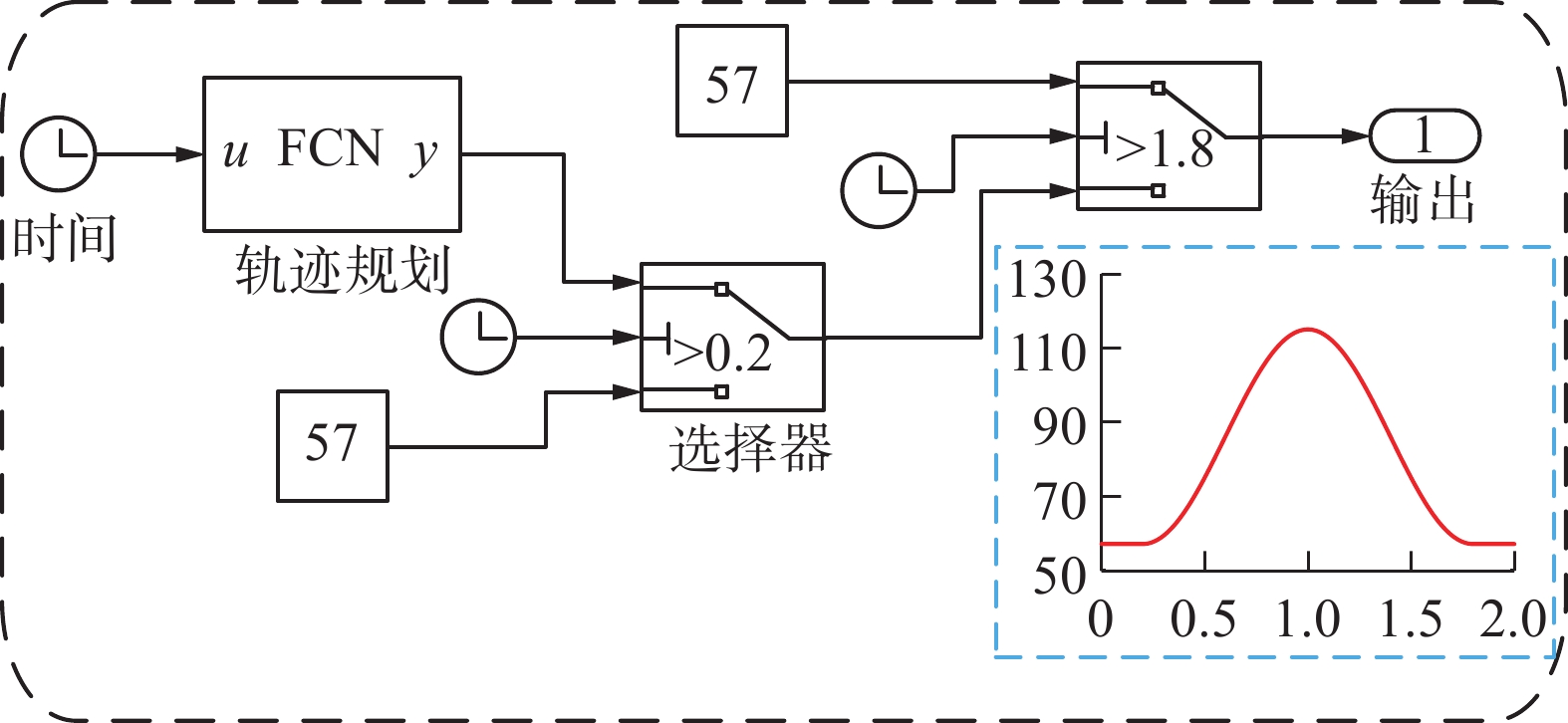
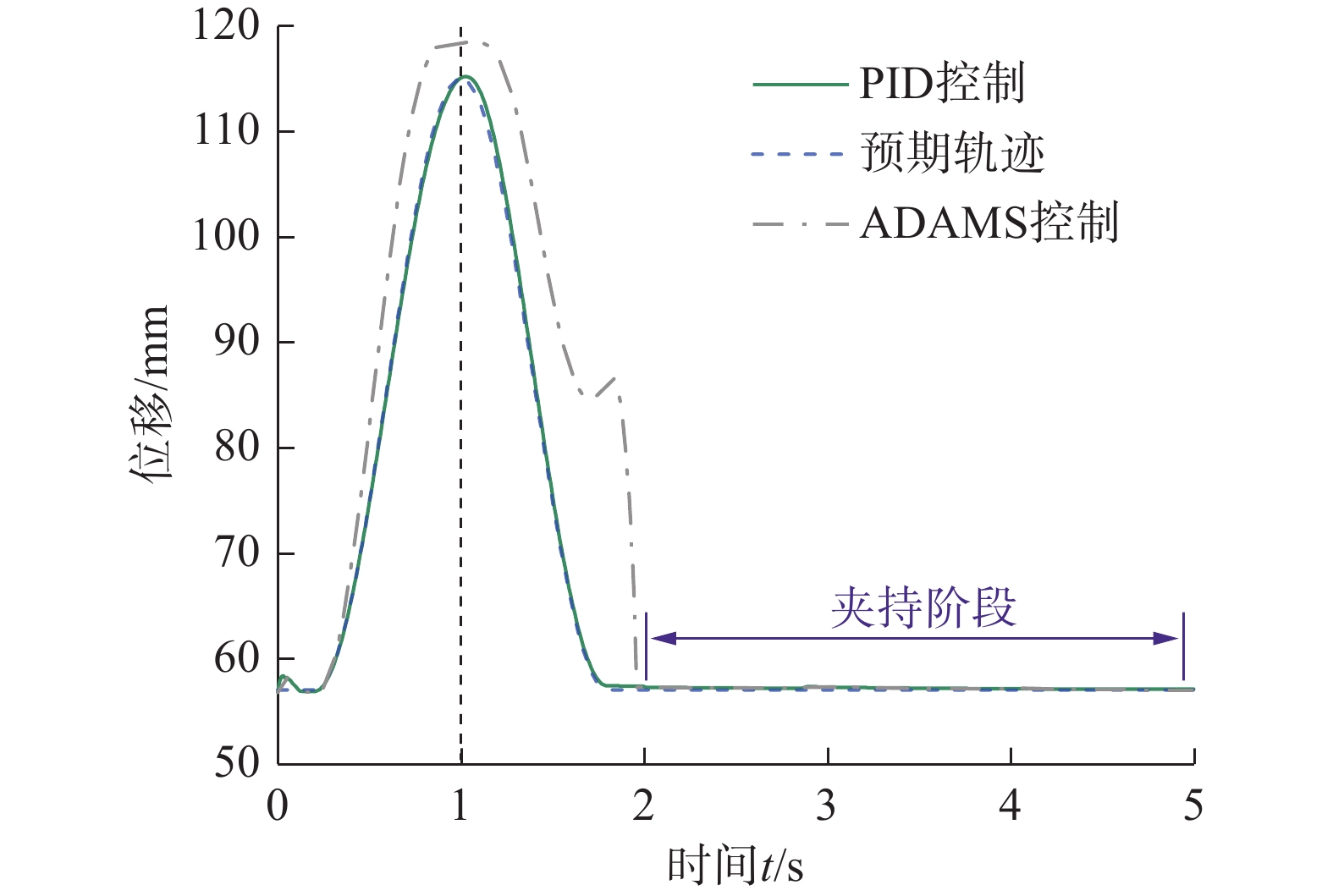
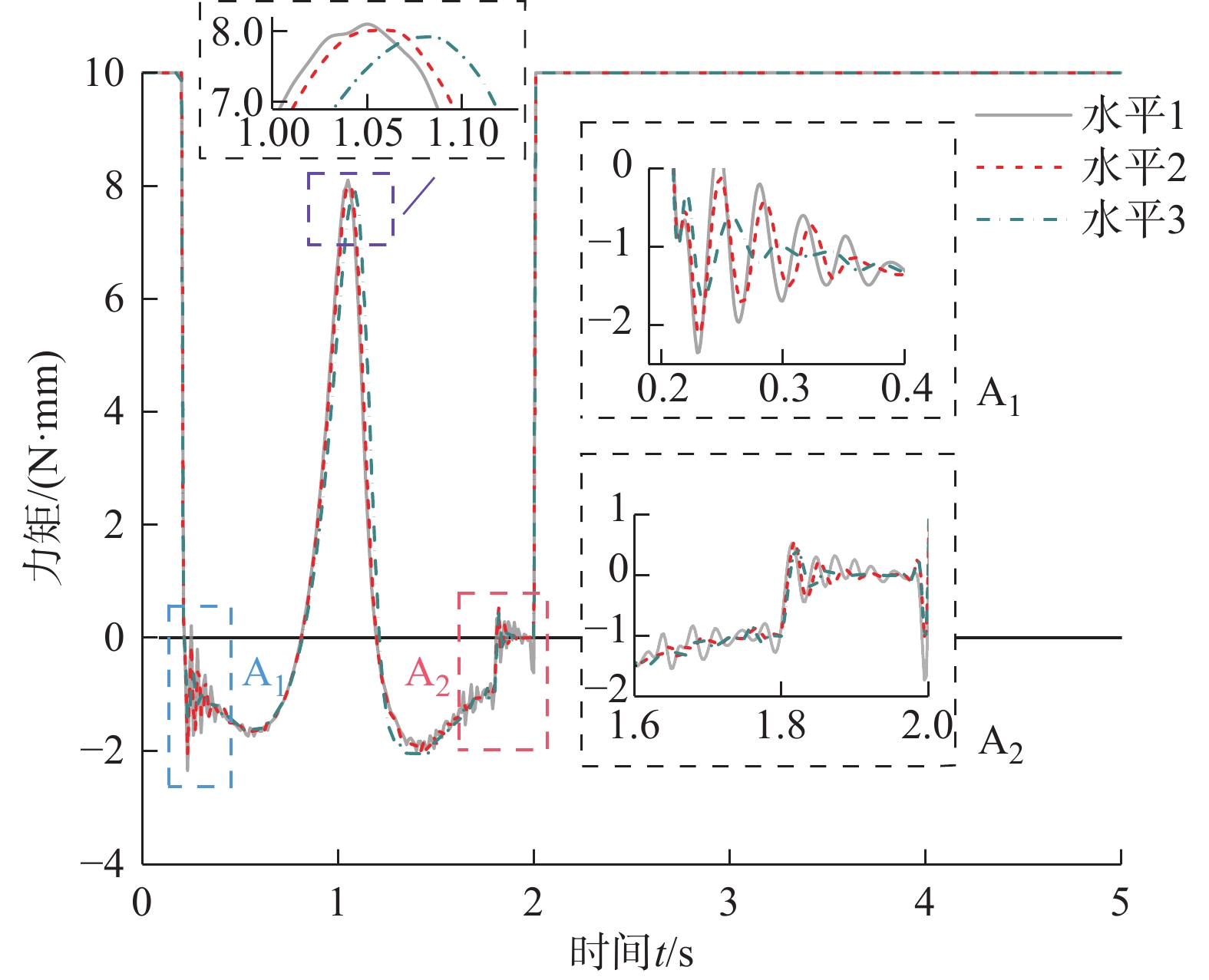
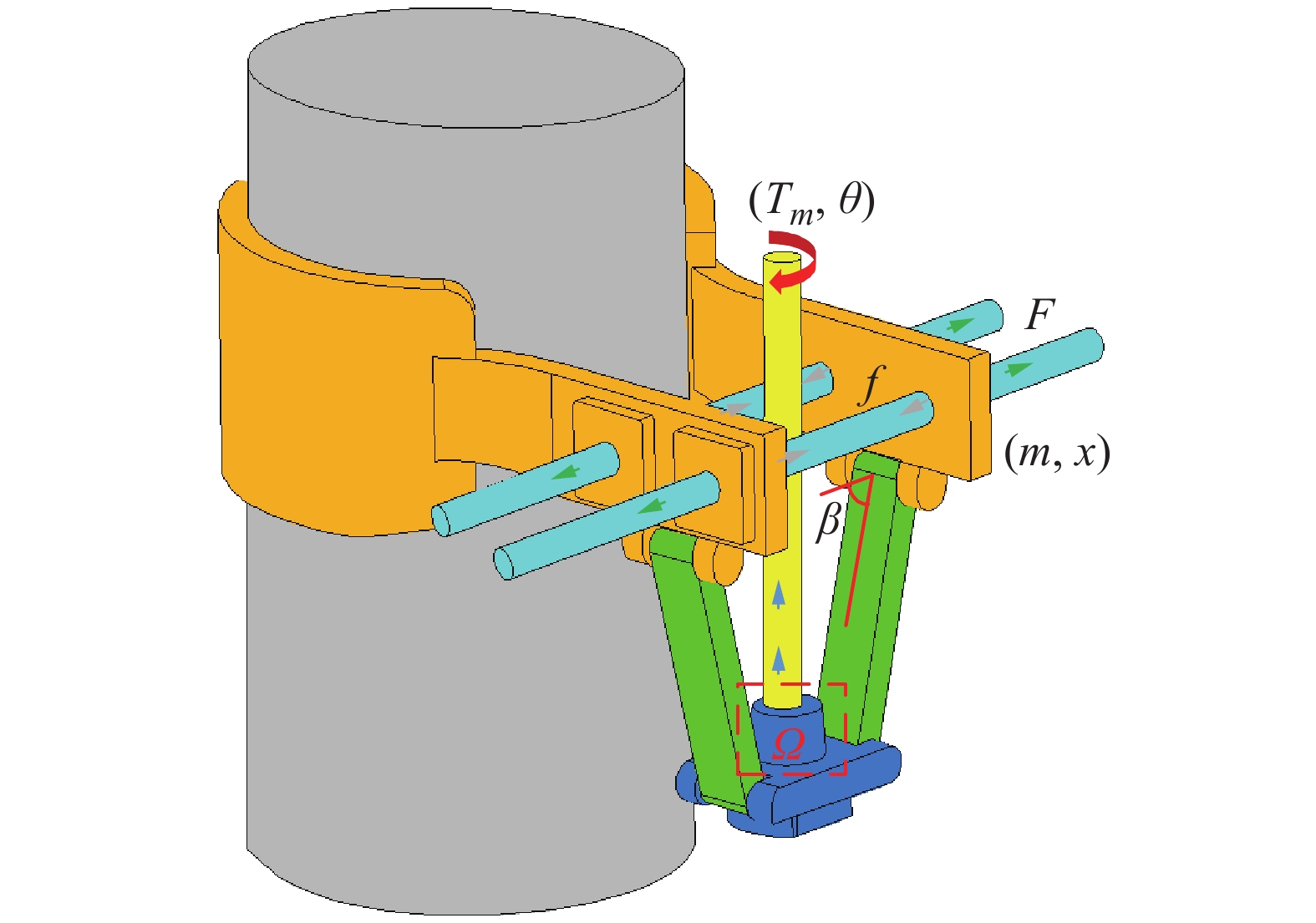
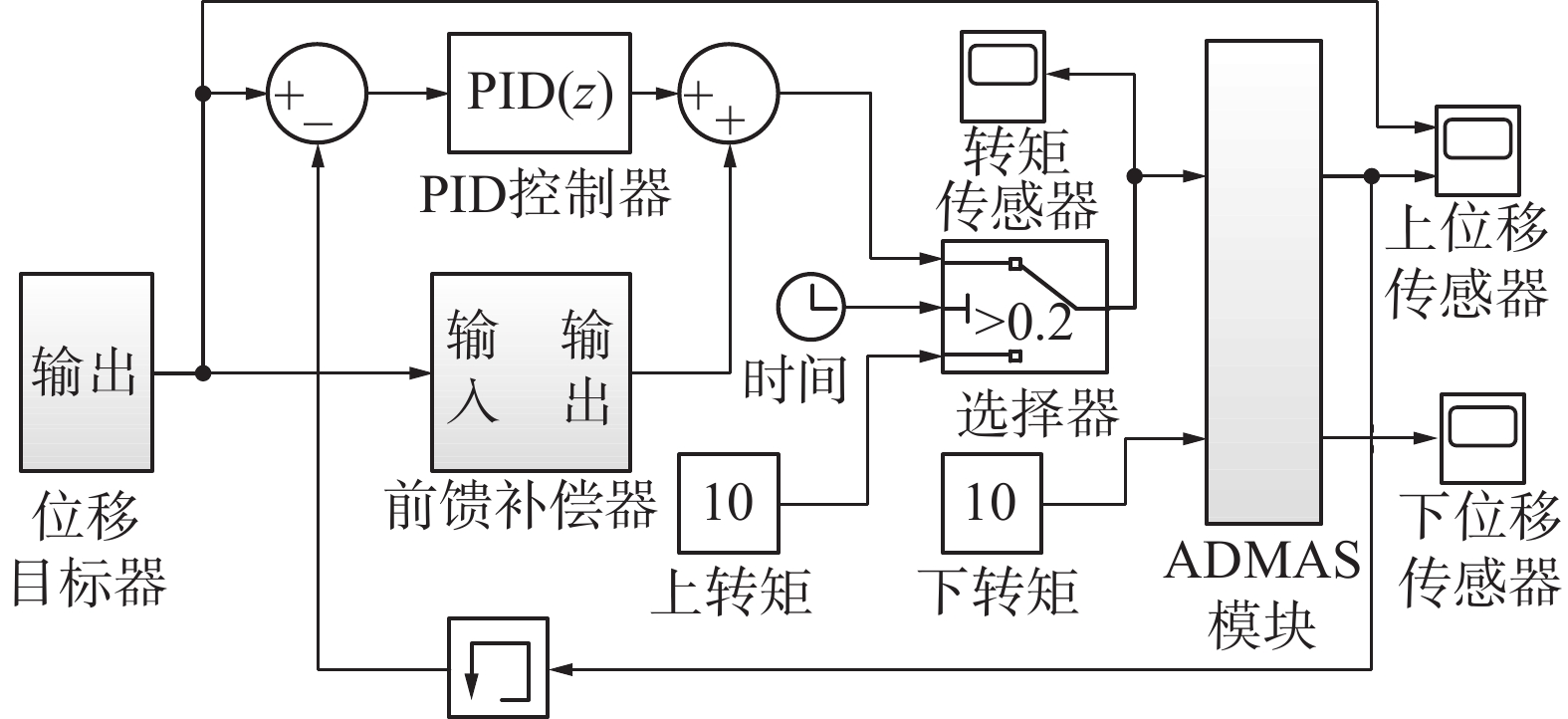
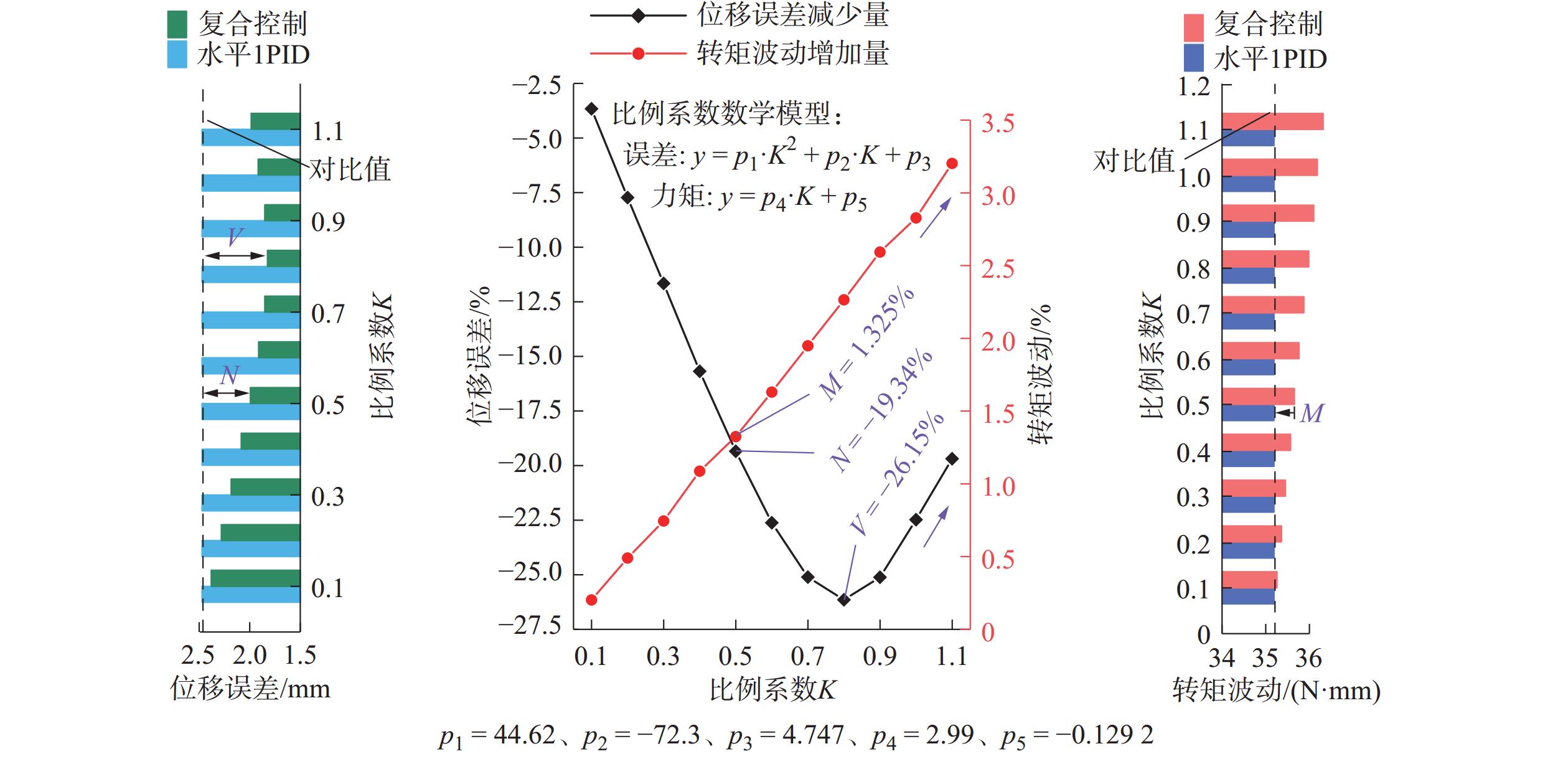
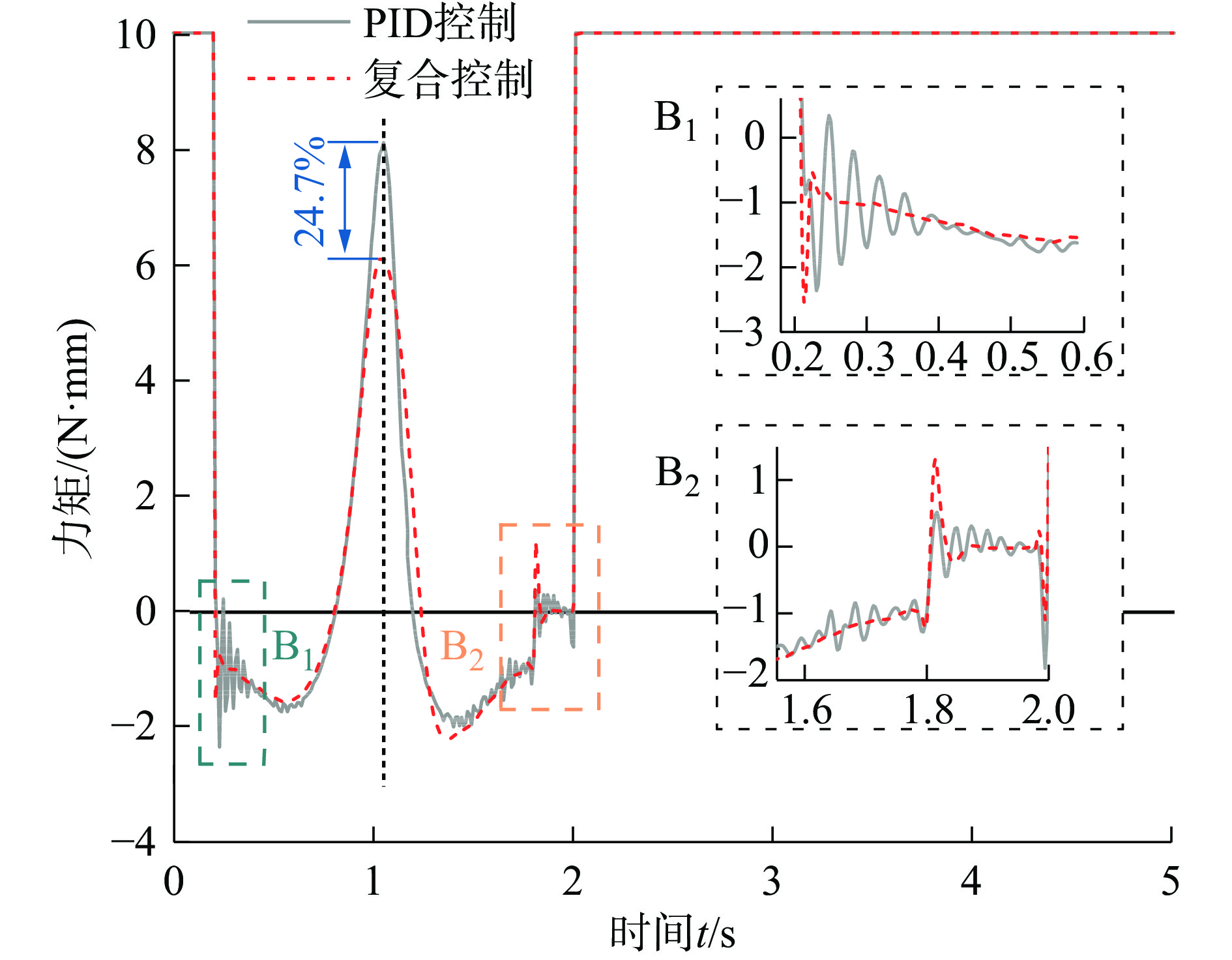
为改善爬杆机器人驱动性能,结合机器人虚拟样机与动力学仿真,提出一种前馈补偿与PID调节优化驱动转矩波动的复合控制方法。在ADAMS中建立机器人多体动力学模型,进行了攀爬运动仿真;在Simulink中搭建了PID控制系统,调节夹块位移量;依据夹持传动的“力矩-位移”数学模型,建立了含有前馈补偿的复合控制系统。由联合仿真可知,采用单一PID控制的机器人,提高夹块位移控制精度会引起驱动转矩波动的增加;复合控制减少了驱动转矩的波动,且驱动转矩的调整幅值比PID控制降低了约24.7%,提高了机器人在攀爬运动中驱动系统的输出效能。
为改善爬杆机器人驱动性能,结合机器人虚拟样机与动力学仿真,提出一种前馈补偿与PID调节优化驱动转矩波动的复合控制方法。在ADAMS中建立机器人多体动力学模型,进行了攀爬运动仿真;在Simulink中搭建了PID控制系统,调节夹块位移量;依据夹持传动的“力矩-位移”数学模型,建立了含有前馈补偿的复合控制系统。由联合仿真可知,采用单一PID控制的机器人,提高夹块位移控制精度会引起驱动转矩波动的增加;复合控制减少了驱动转矩的波动,且驱动转矩的调整幅值比PID控制降低了约24.7%,提高了机器人在攀爬运动中驱动系统的输出效能。



2024, 43(5): 790-797.
doi: 10.13433/j.cnki.1003-8728.20230054
摘要:
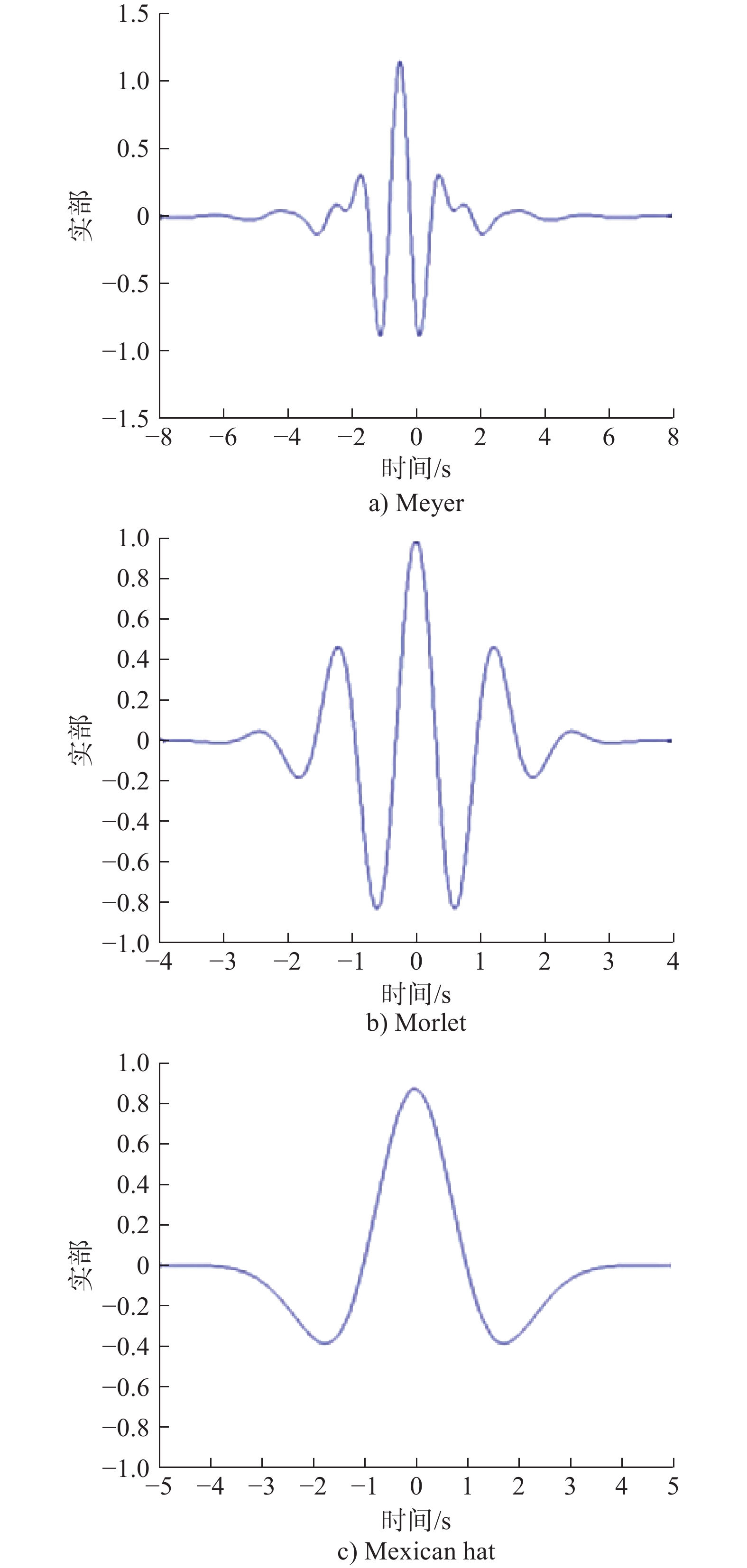
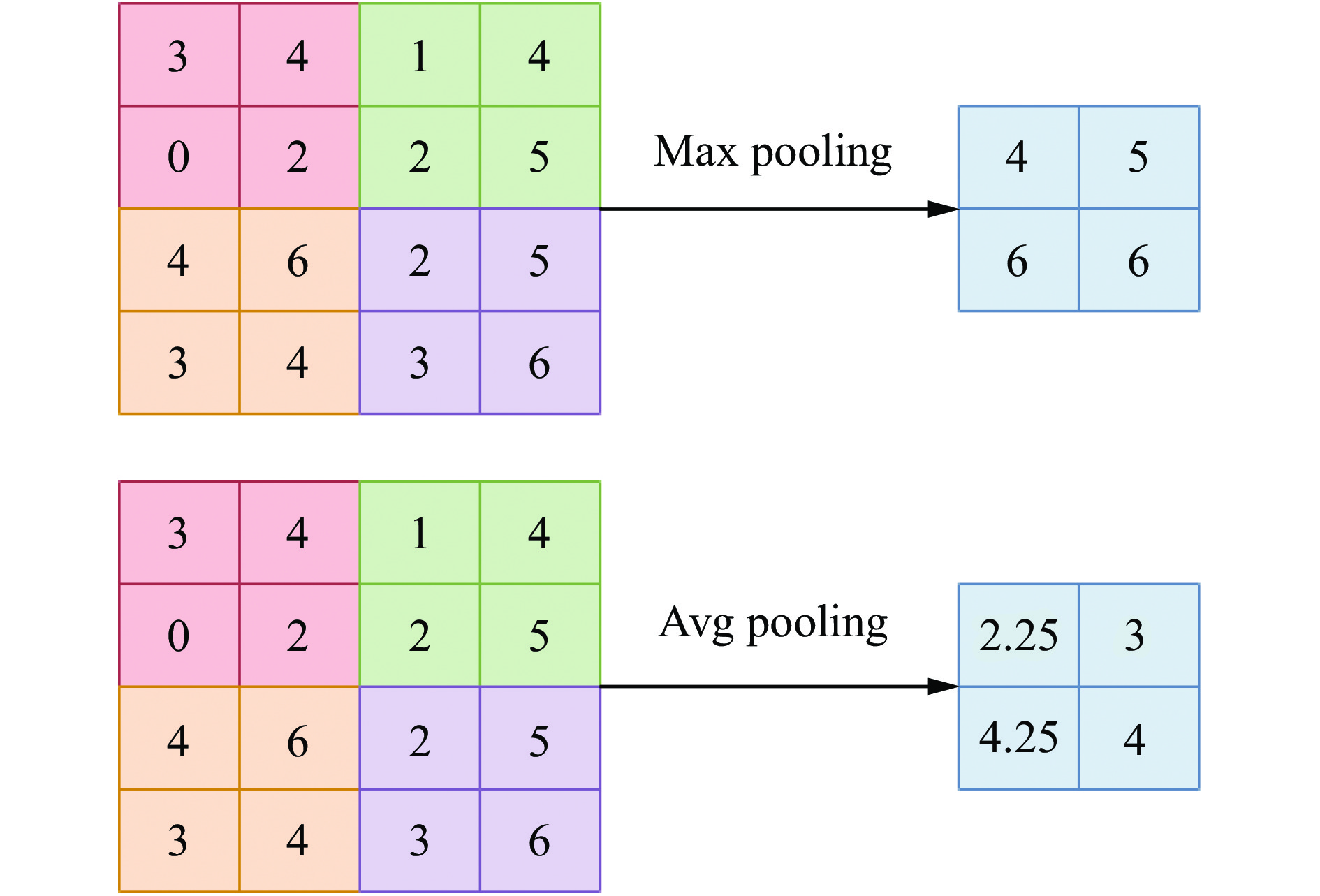
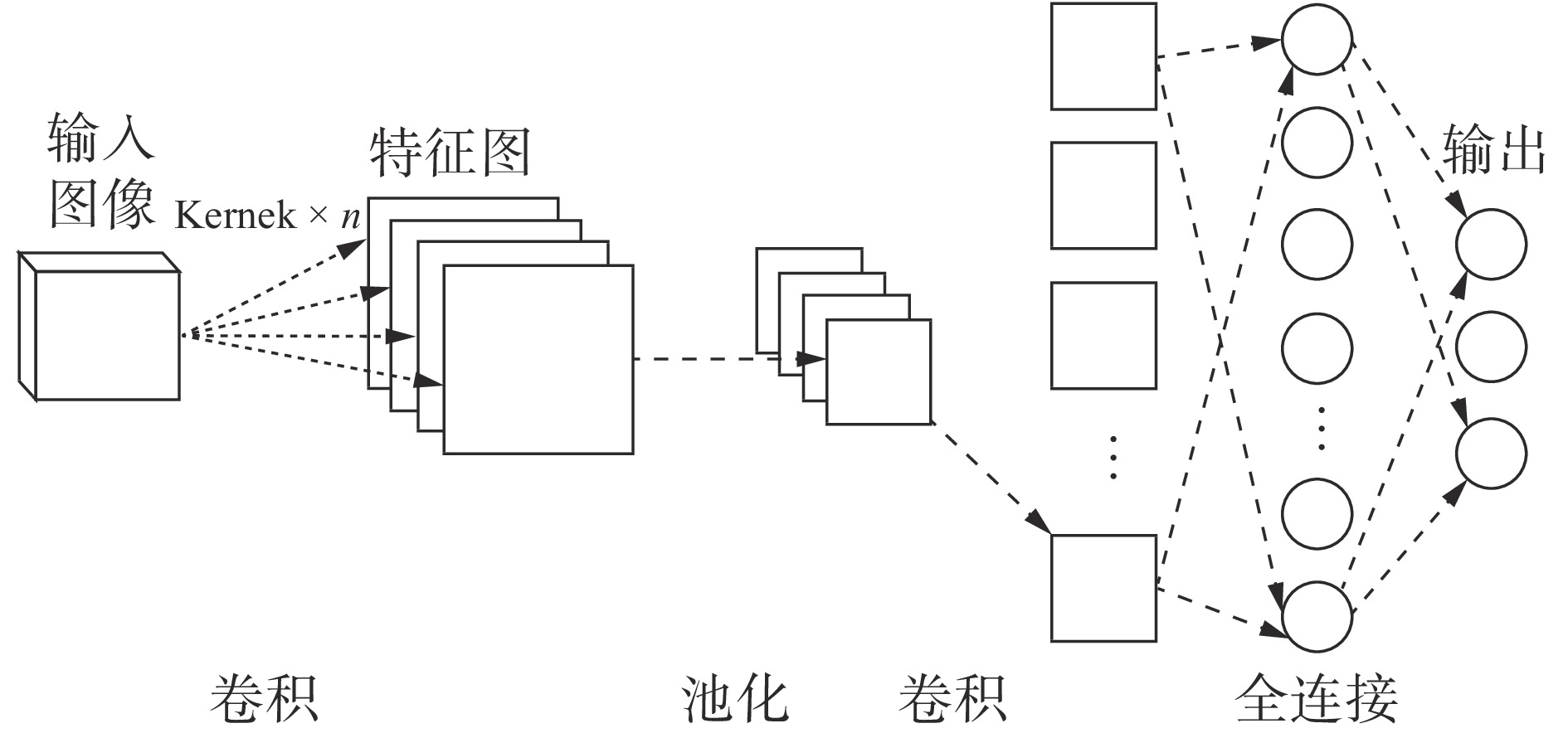
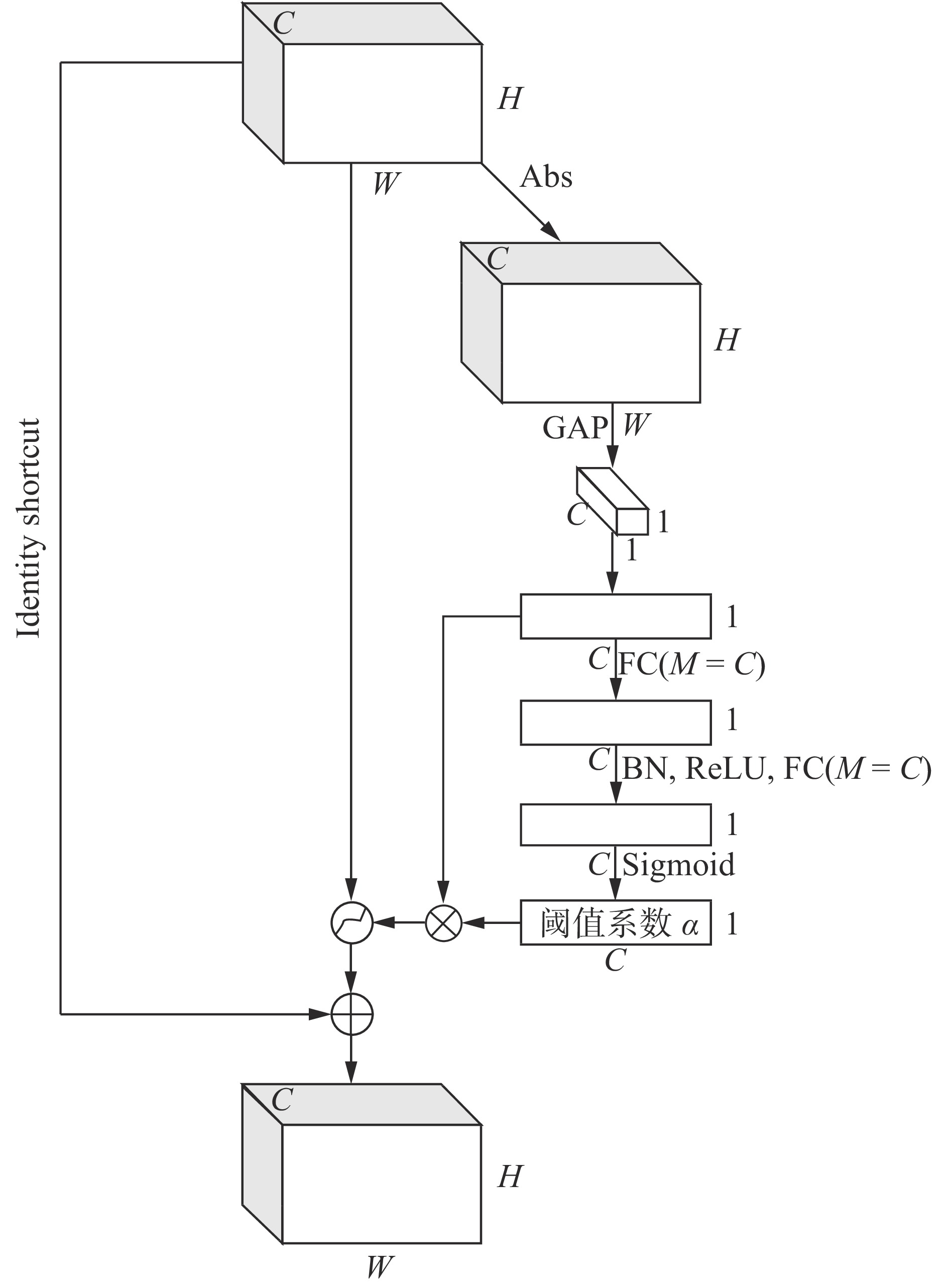
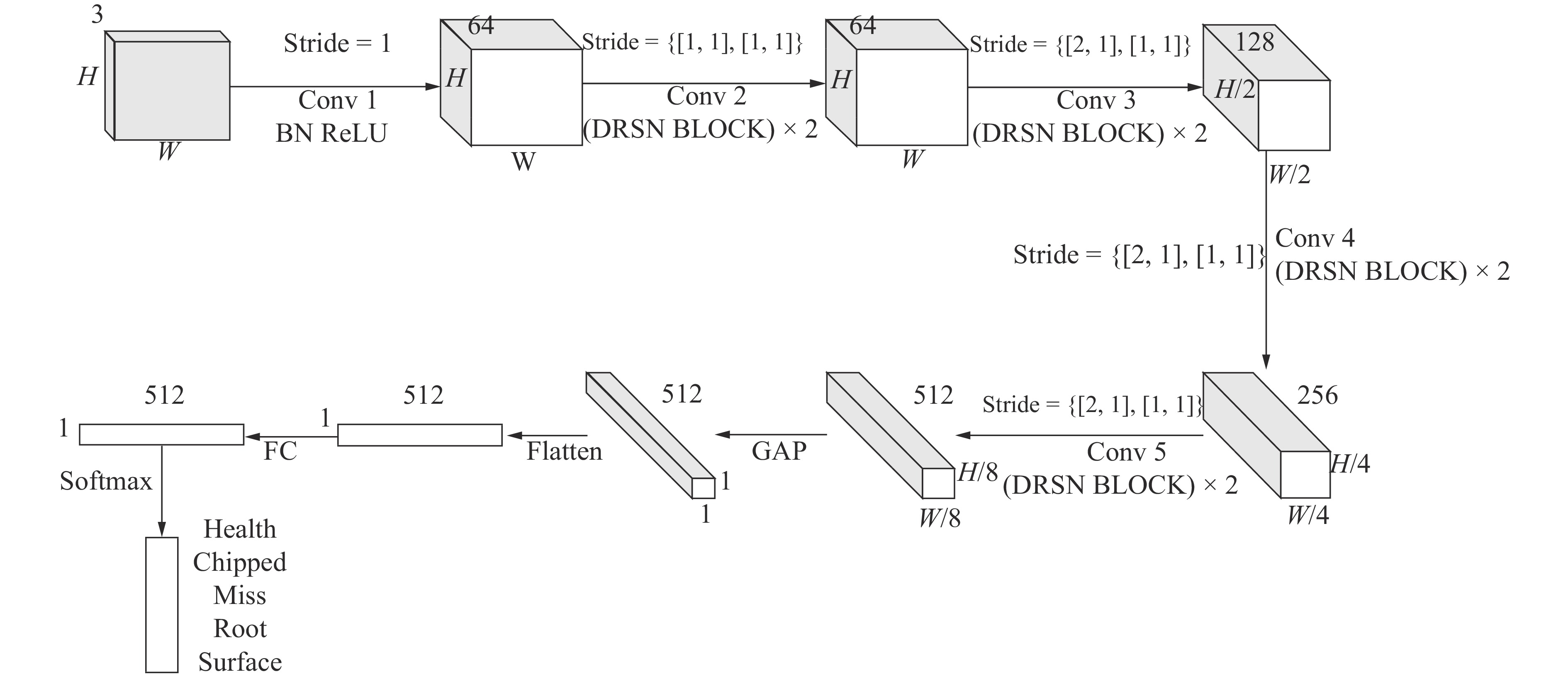
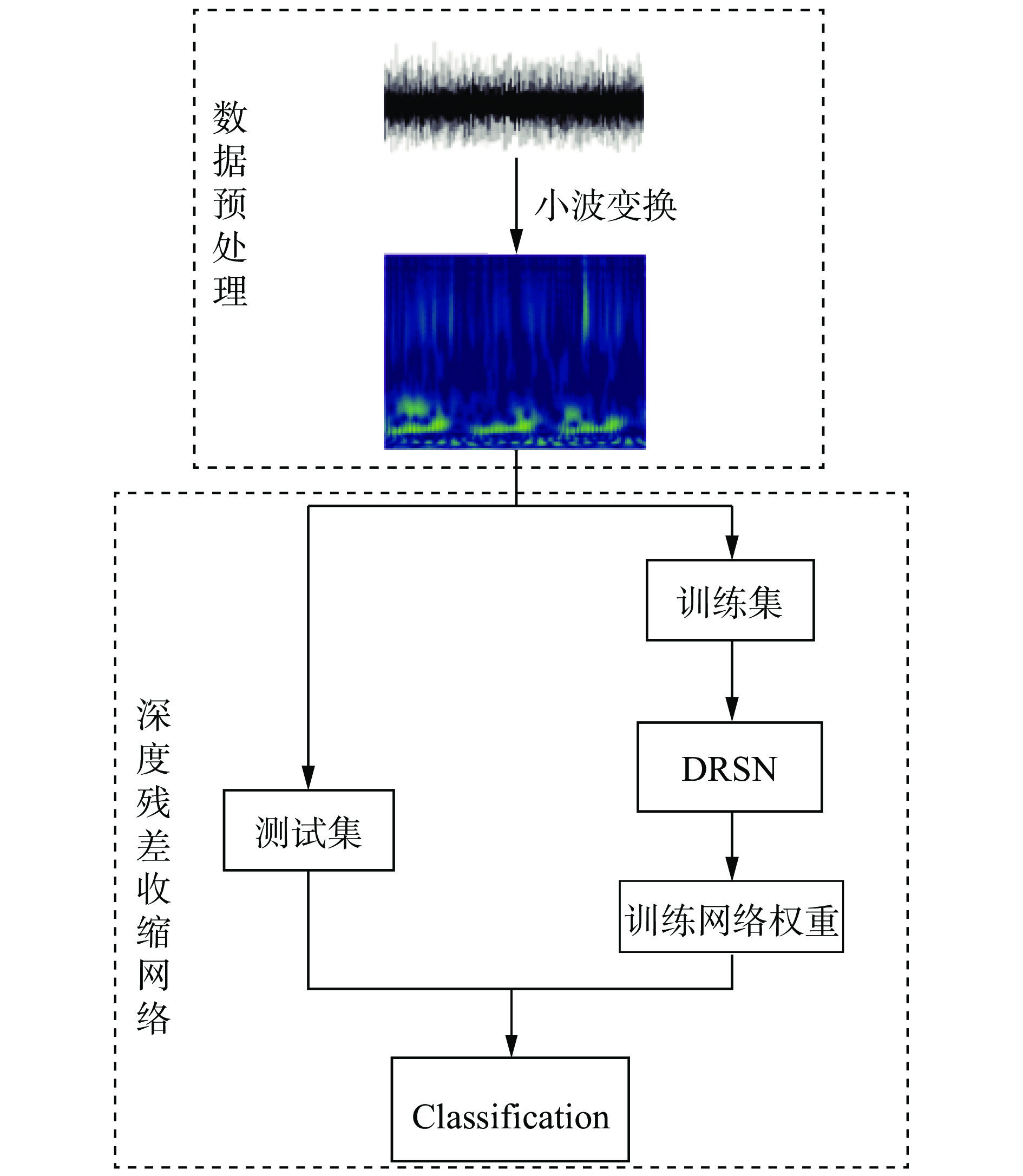
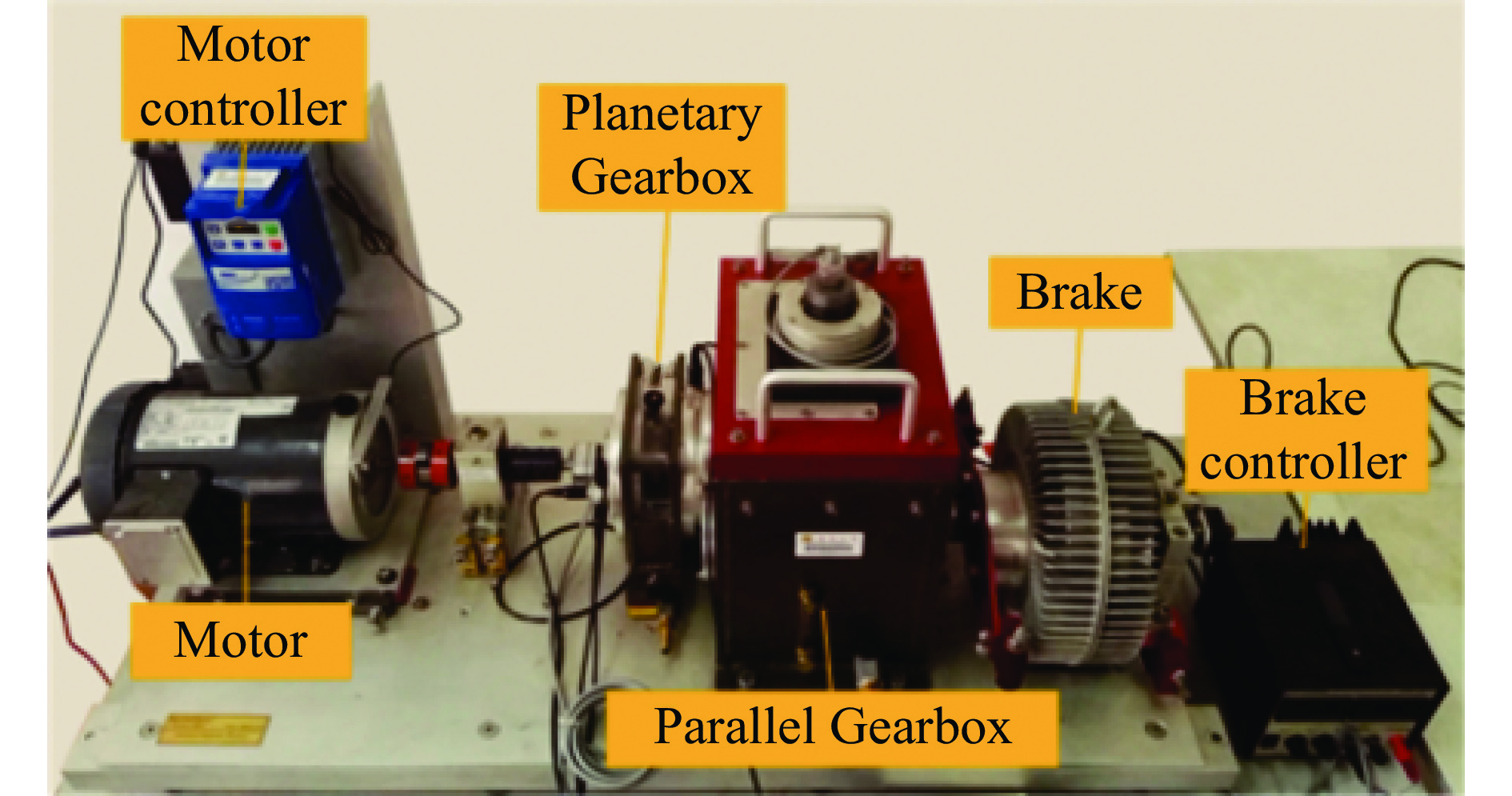
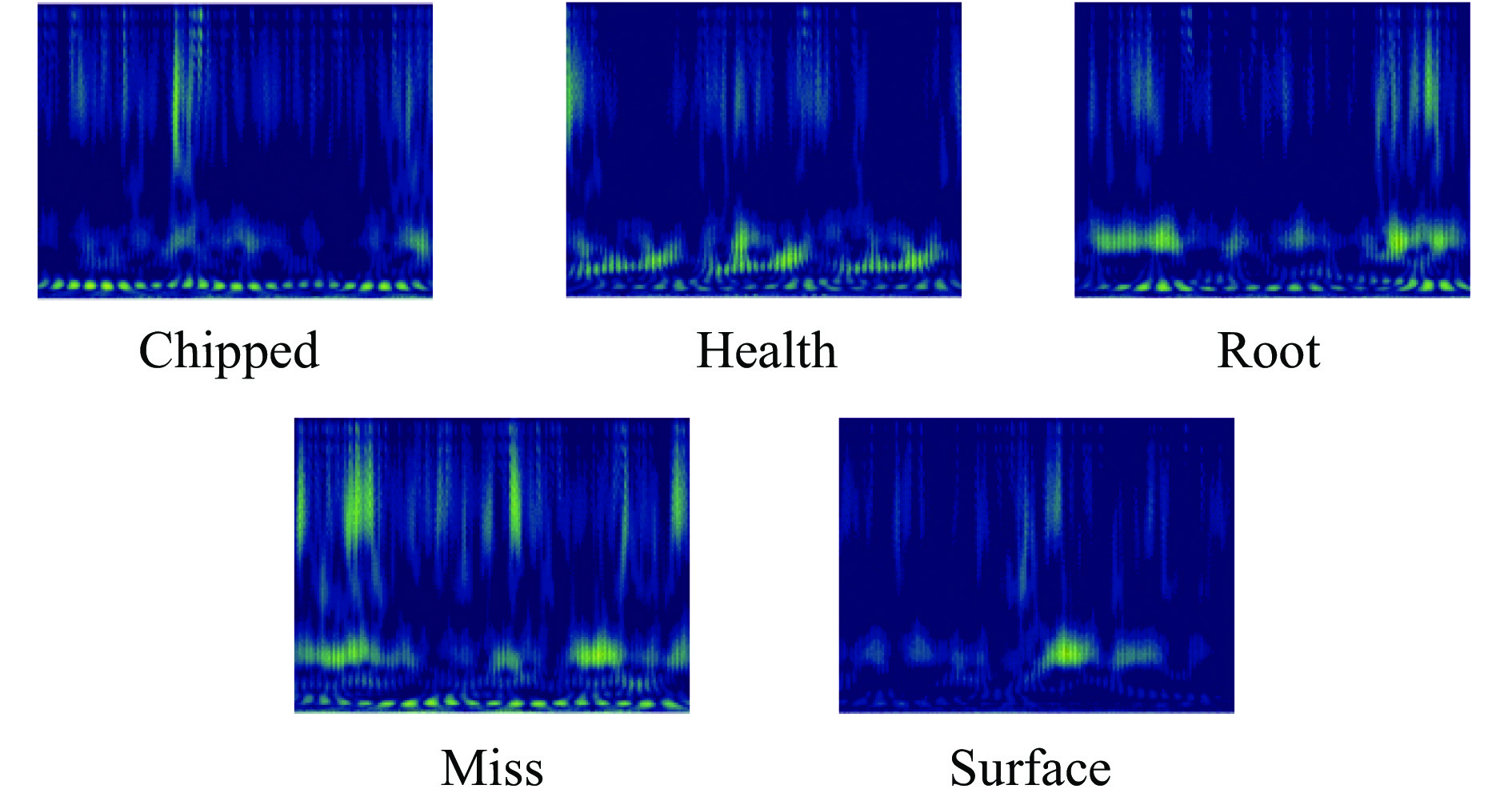
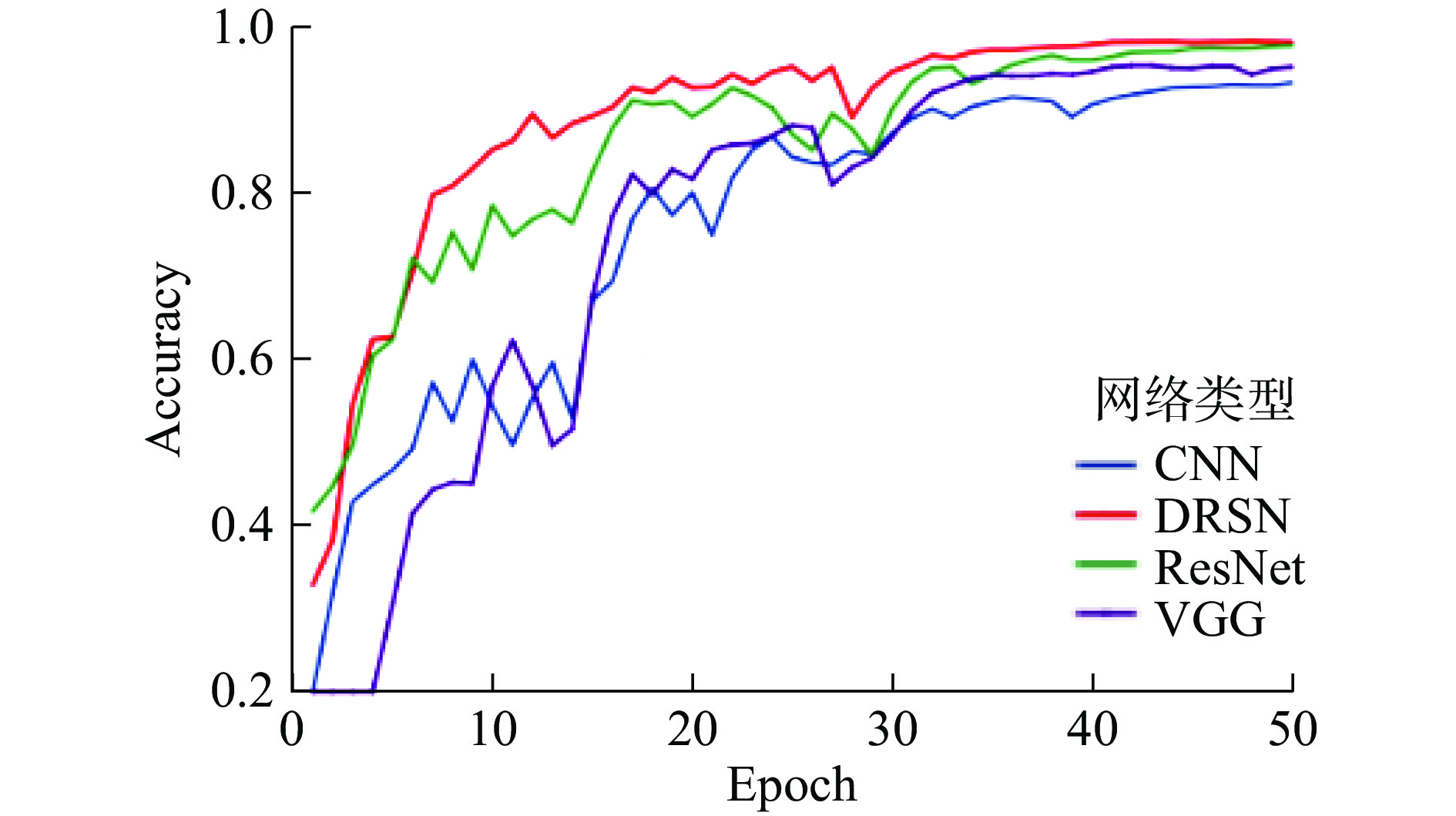
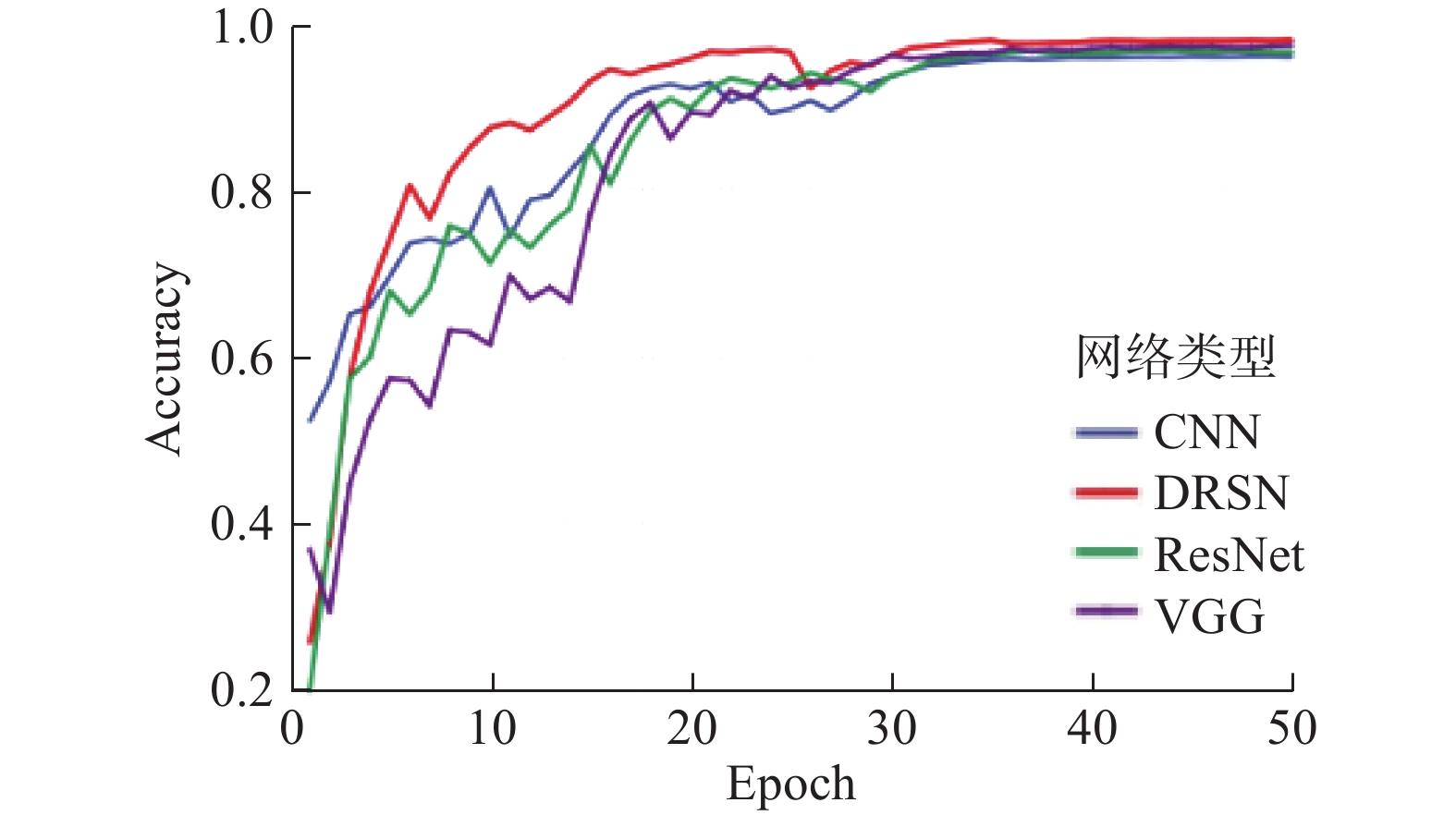
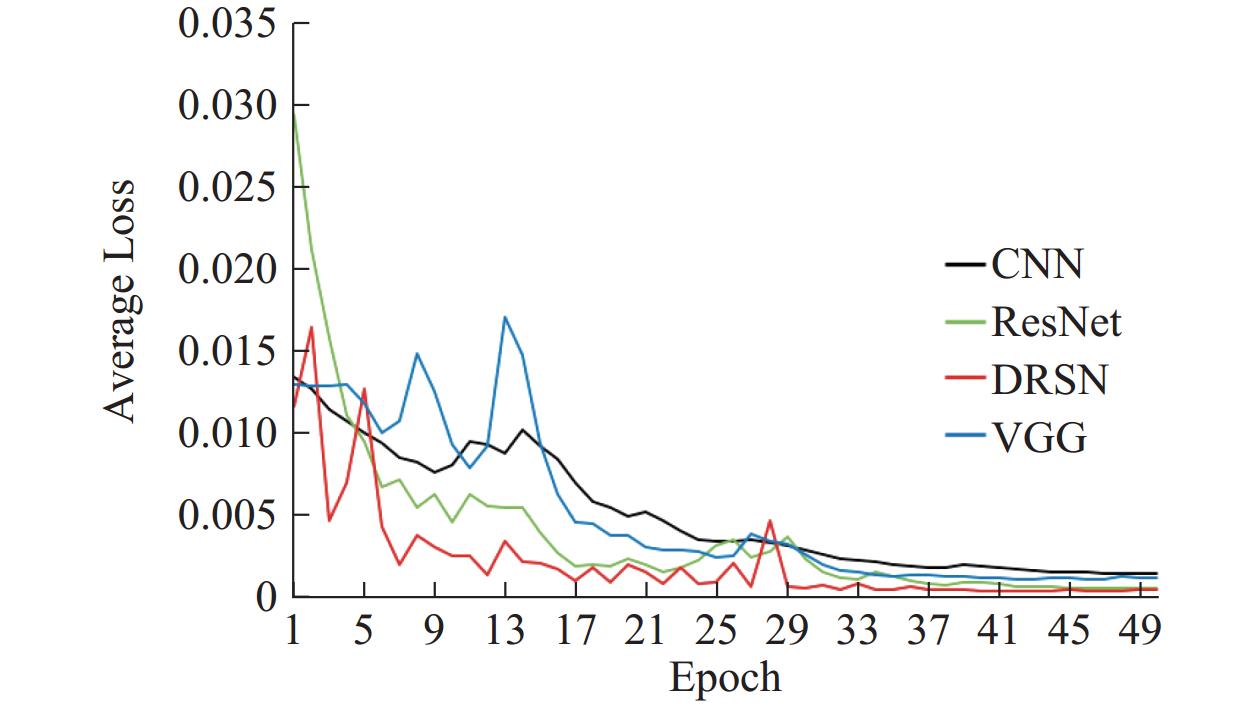
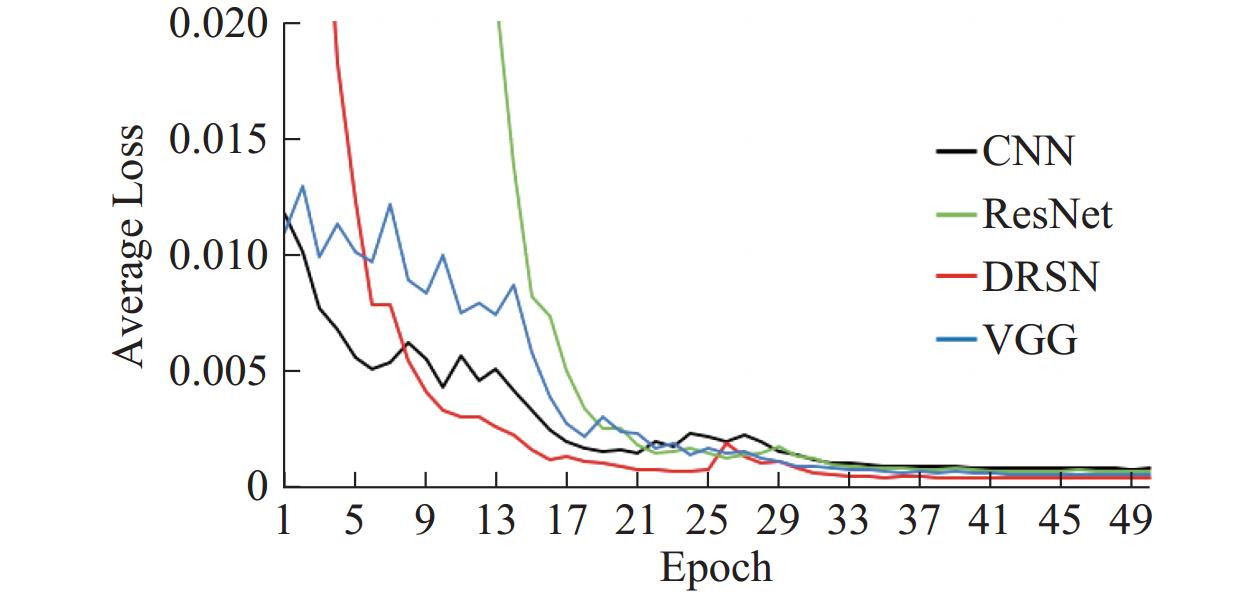
齿轮的精确故障诊断是确保旋转机械设备稳定可靠运行的有效手段,针对强噪声环境下齿轮箱中齿轮故障分类问题,提出了一种基于连续小波变换和深度残差收缩网络的故障诊断模型。首先,采用小波变换对一维时间序列的振动数据进行时频分析,将其转化为二维时频图作为深度残差收缩网络(DRSN)的输入;其次,在多层卷积神经网络的基础上加入残差结构中的跨层恒等连接解决了梯度消失和爆炸的问题,同时利用自适应阈值子网络实现软阈值化降噪;最后,将故障样本的时频图作为诊断模型的输入进行故障分类。实验结果证明了与其他模型相比,本文采用的故障诊断方法更容易识别故障特征,分类准确率达到了99.15%。
齿轮的精确故障诊断是确保旋转机械设备稳定可靠运行的有效手段,针对强噪声环境下齿轮箱中齿轮故障分类问题,提出了一种基于连续小波变换和深度残差收缩网络的故障诊断模型。首先,采用小波变换对一维时间序列的振动数据进行时频分析,将其转化为二维时频图作为深度残差收缩网络(DRSN)的输入;其次,在多层卷积神经网络的基础上加入残差结构中的跨层恒等连接解决了梯度消失和爆炸的问题,同时利用自适应阈值子网络实现软阈值化降噪;最后,将故障样本的时频图作为诊断模型的输入进行故障分类。实验结果证明了与其他模型相比,本文采用的故障诊断方法更容易识别故障特征,分类准确率达到了99.15%。


2024, 43(5): 798-804.
doi: 10.13433/j.cnki.1003-8728.20220254
摘要:
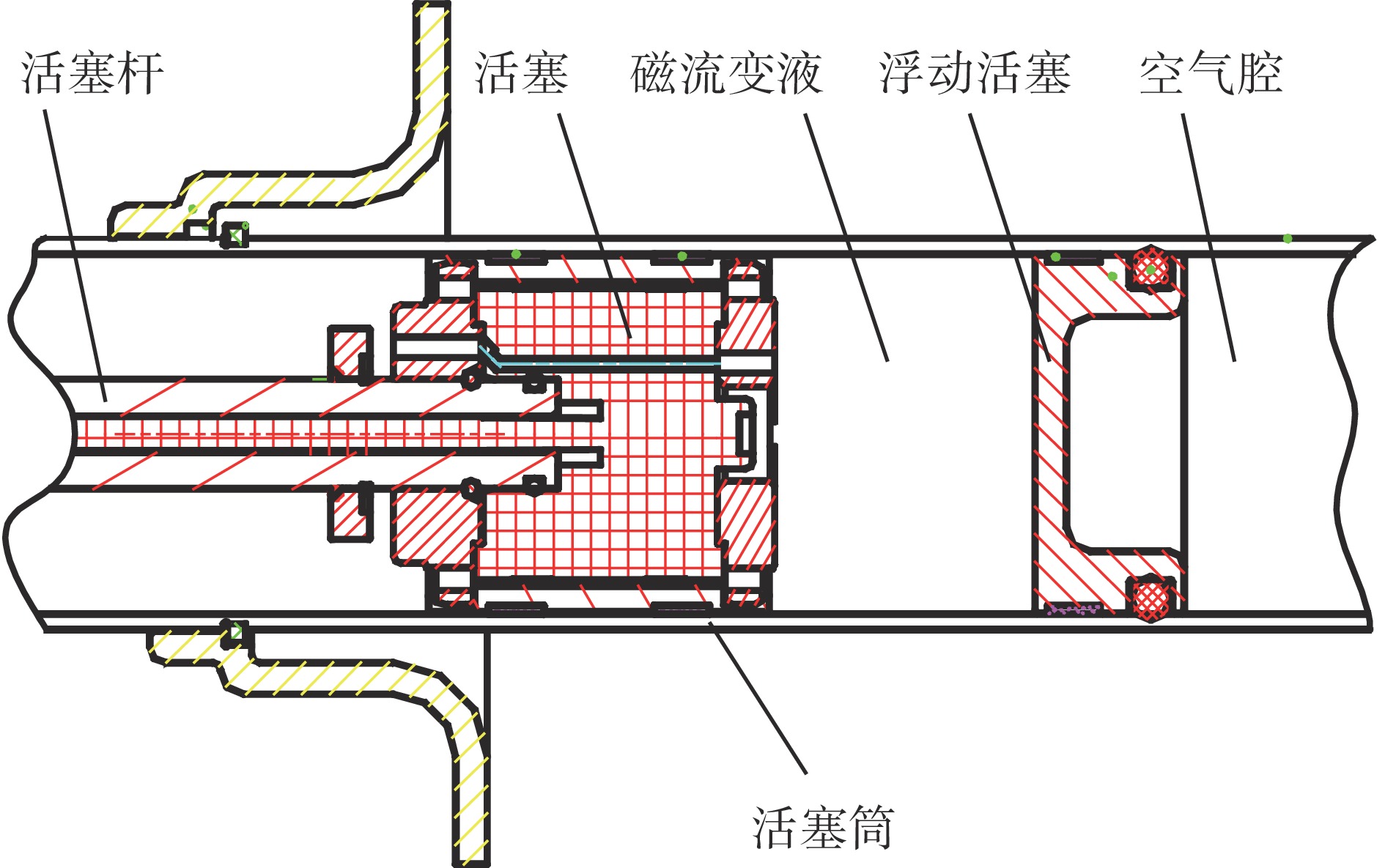
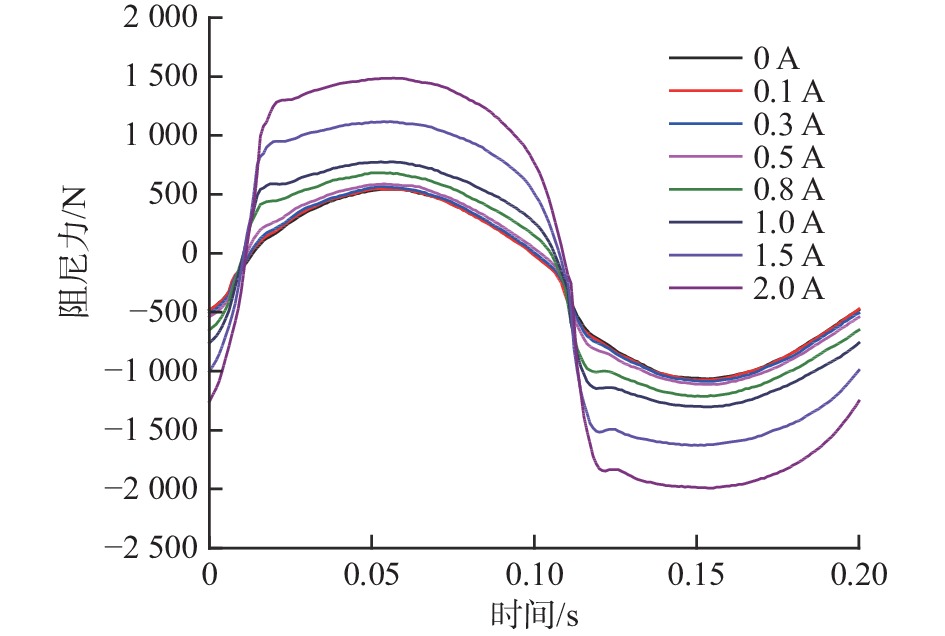
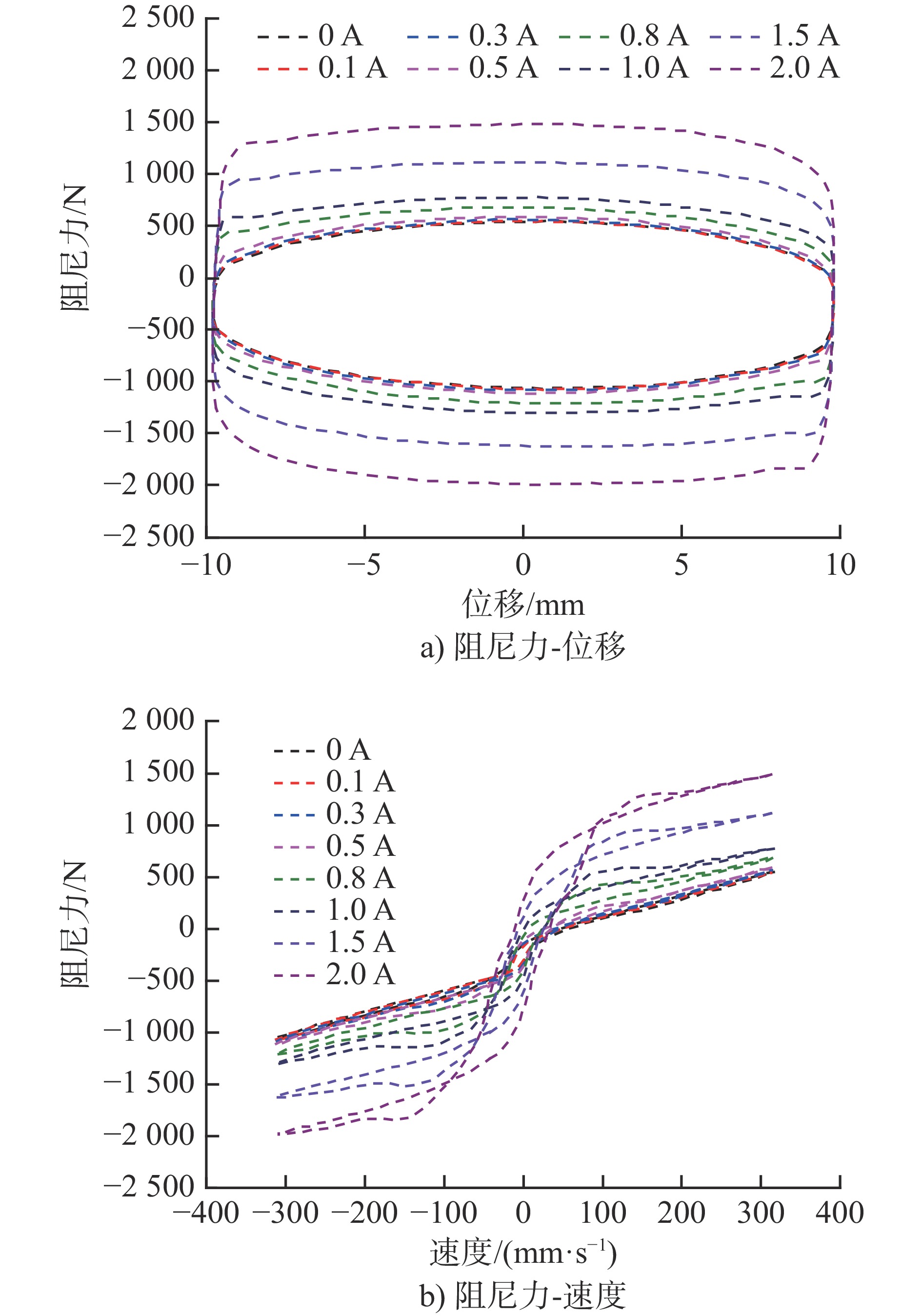
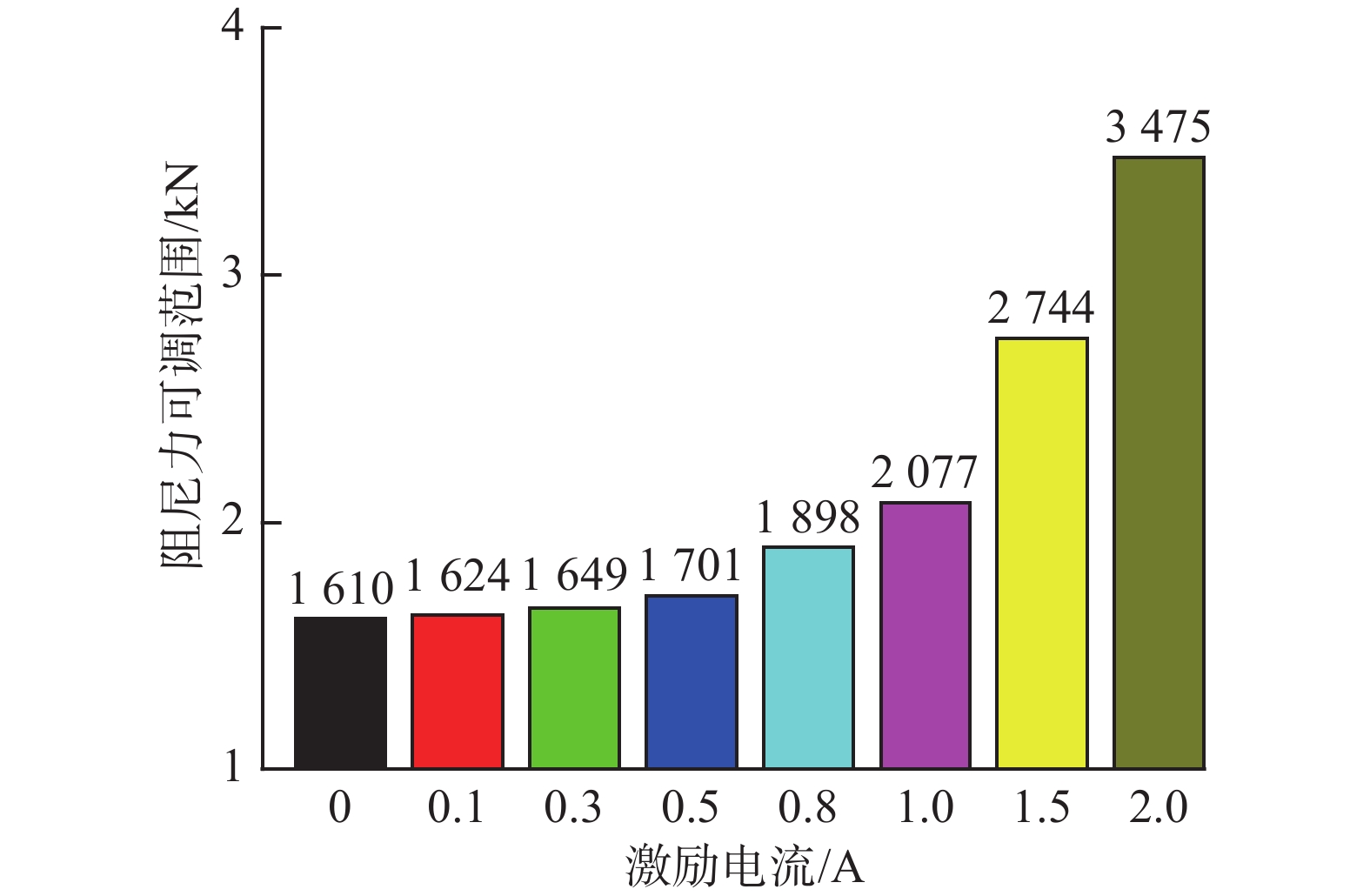
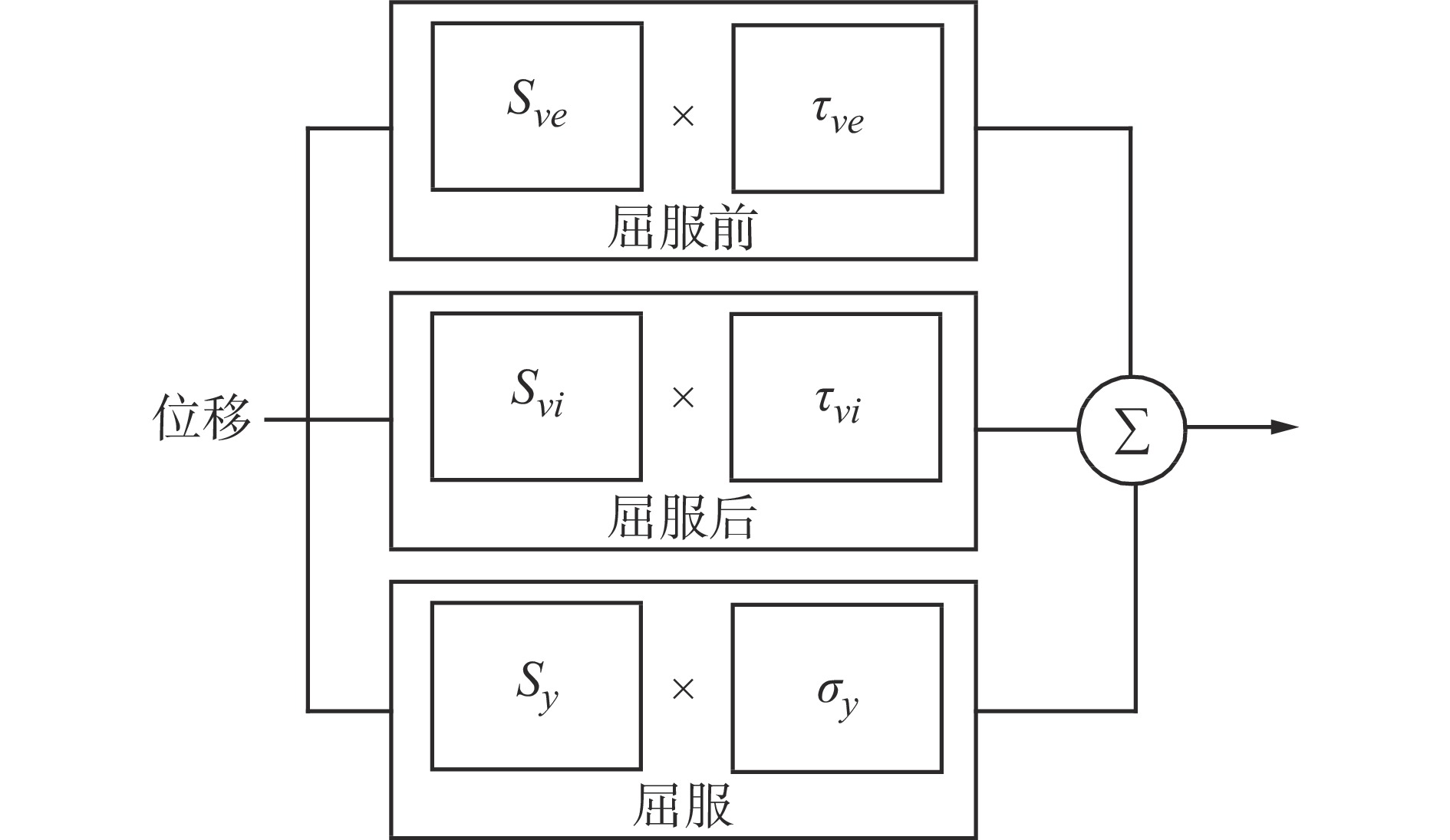
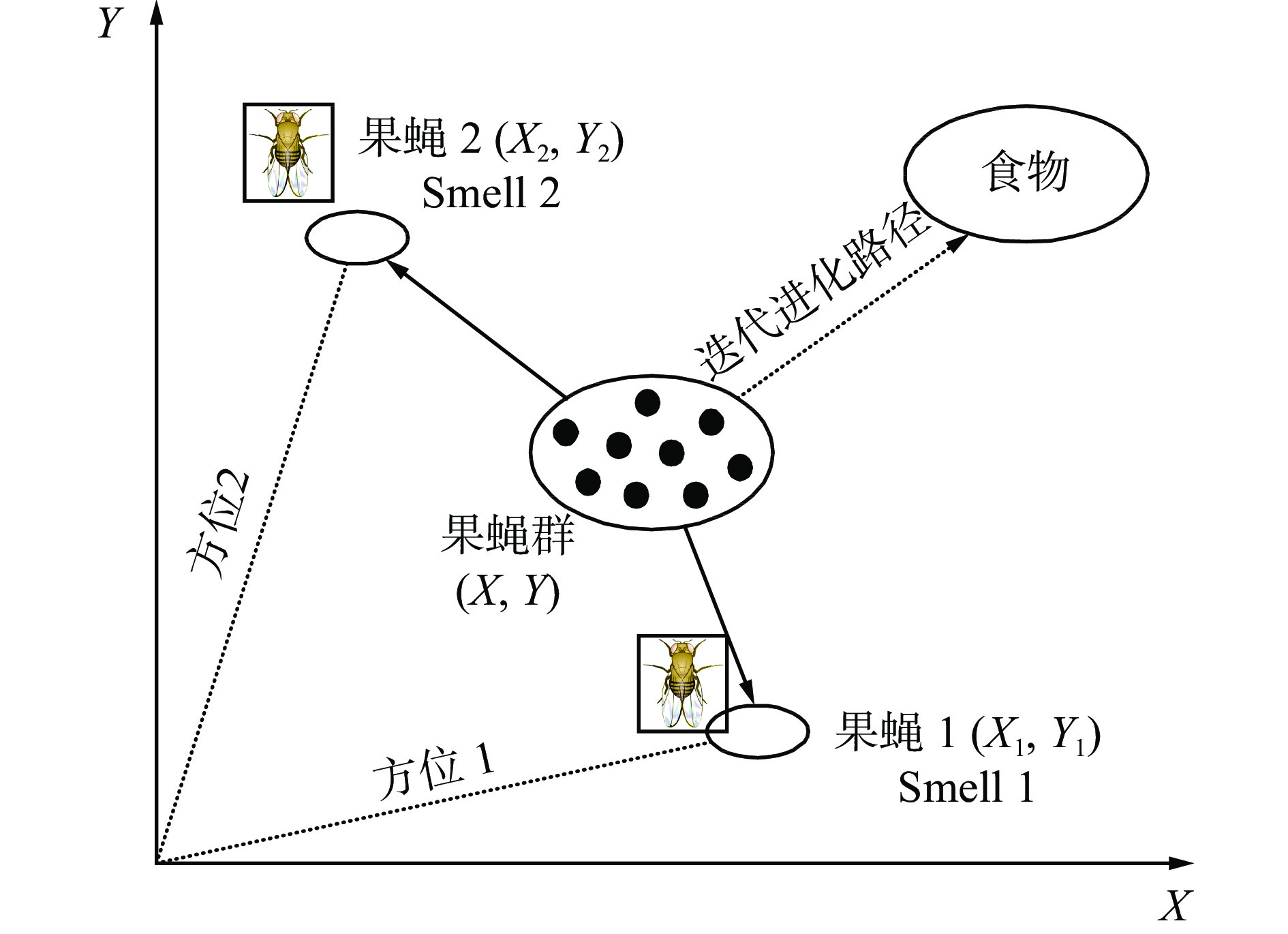
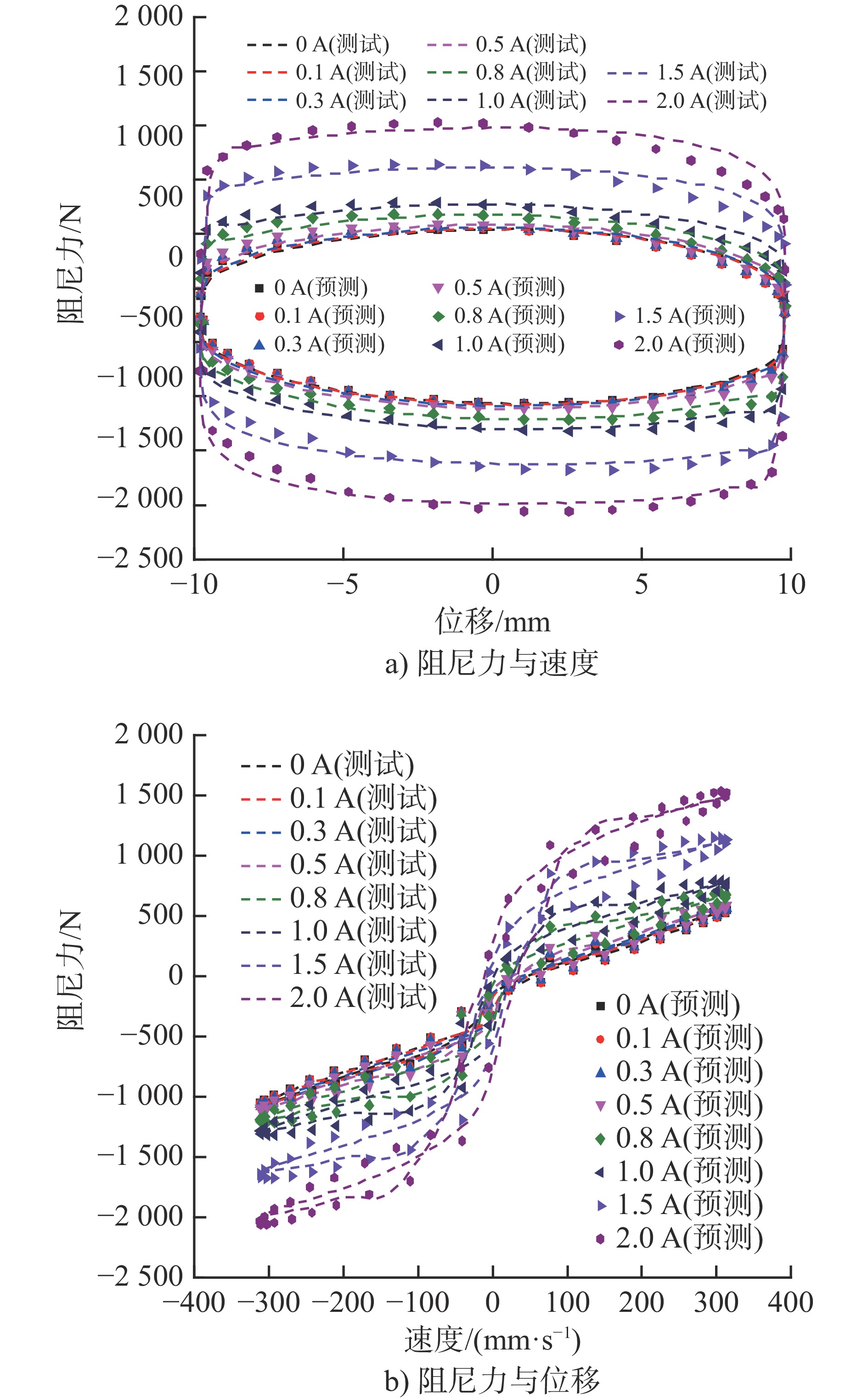
为了建模合适的参数模型来描述阻尼器的动态输出特性,发挥磁流变阻尼器工程应用中的半主动控制优势。本文的研究在激励频率和振幅为5 Hz和10 mm条件下,利用振动系统测试磁流变阻尼器在不同激励电流下得到动态输出特性,在此基础上利用黏-弹-塑性参数模型,采用果蝇优化算法对所有电流下的实测结果进行预测并对其结果展开分析讨论。研究结果表明该阻尼器的输出力能够跟随外部位移随时间变化情况;阻尼力随激励电流增大表现出先缓慢增大后显著增大的特性,这表明该阻尼器具有依赖输入电流的可控性,为实现工程应用中的半主动控制提供条件。并讨论了产生这种现象的原因在于不同电流下颗粒于基体间的相互作用。预测结果表明利用果蝇优化算法,黏-弹-塑性参数模型能够很好的描述实测结果。
为了建模合适的参数模型来描述阻尼器的动态输出特性,发挥磁流变阻尼器工程应用中的半主动控制优势。本文的研究在激励频率和振幅为5 Hz和10 mm条件下,利用振动系统测试磁流变阻尼器在不同激励电流下得到动态输出特性,在此基础上利用黏-弹-塑性参数模型,采用果蝇优化算法对所有电流下的实测结果进行预测并对其结果展开分析讨论。研究结果表明该阻尼器的输出力能够跟随外部位移随时间变化情况;阻尼力随激励电流增大表现出先缓慢增大后显著增大的特性,这表明该阻尼器具有依赖输入电流的可控性,为实现工程应用中的半主动控制提供条件。并讨论了产生这种现象的原因在于不同电流下颗粒于基体间的相互作用。预测结果表明利用果蝇优化算法,黏-弹-塑性参数模型能够很好的描述实测结果。

2024, 43(5): 805-811.
doi: 10.13433/j.cnki.1003-8728.20220294
摘要:
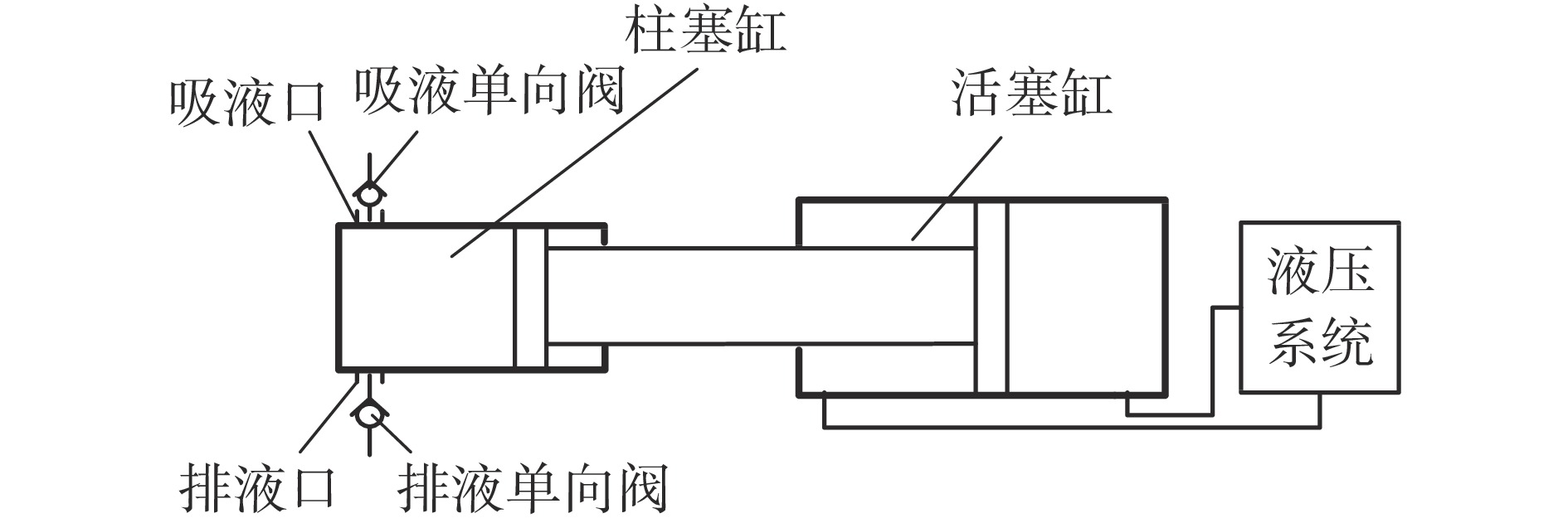
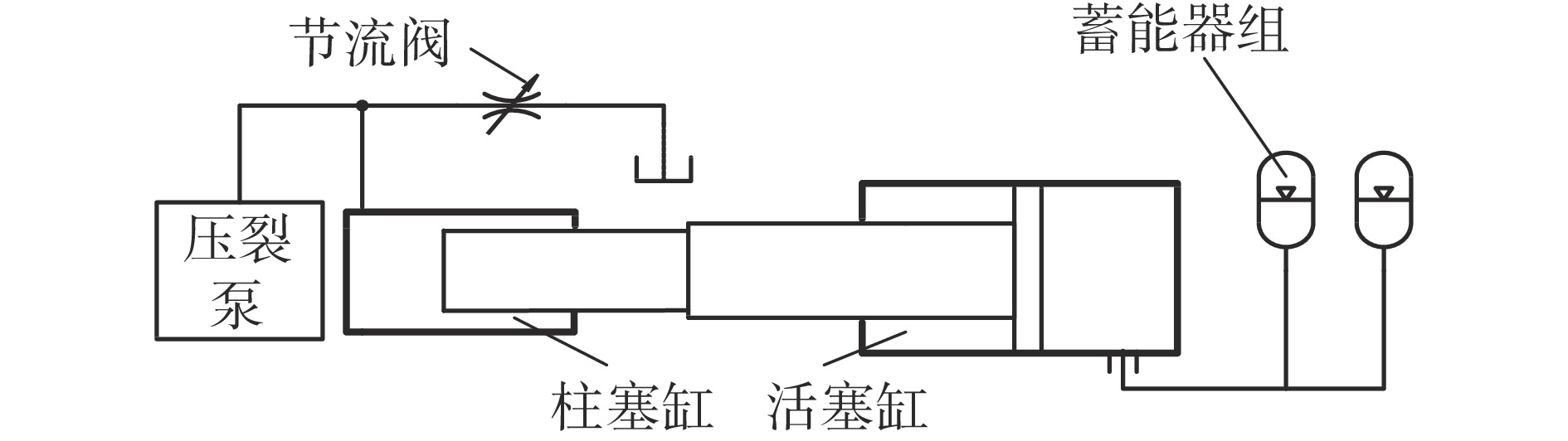
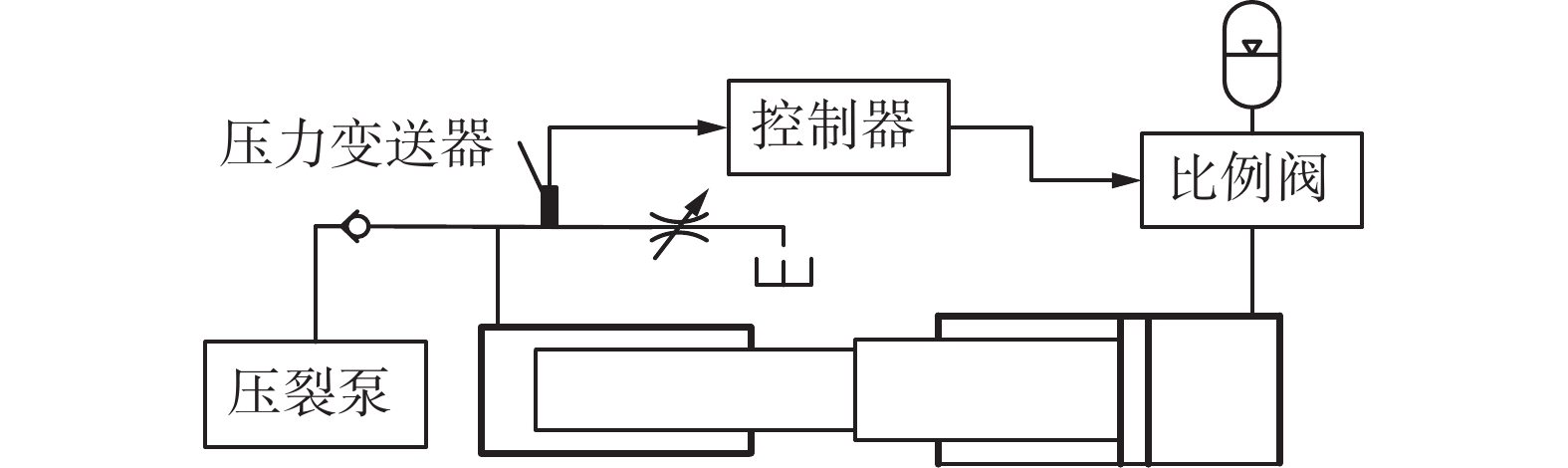
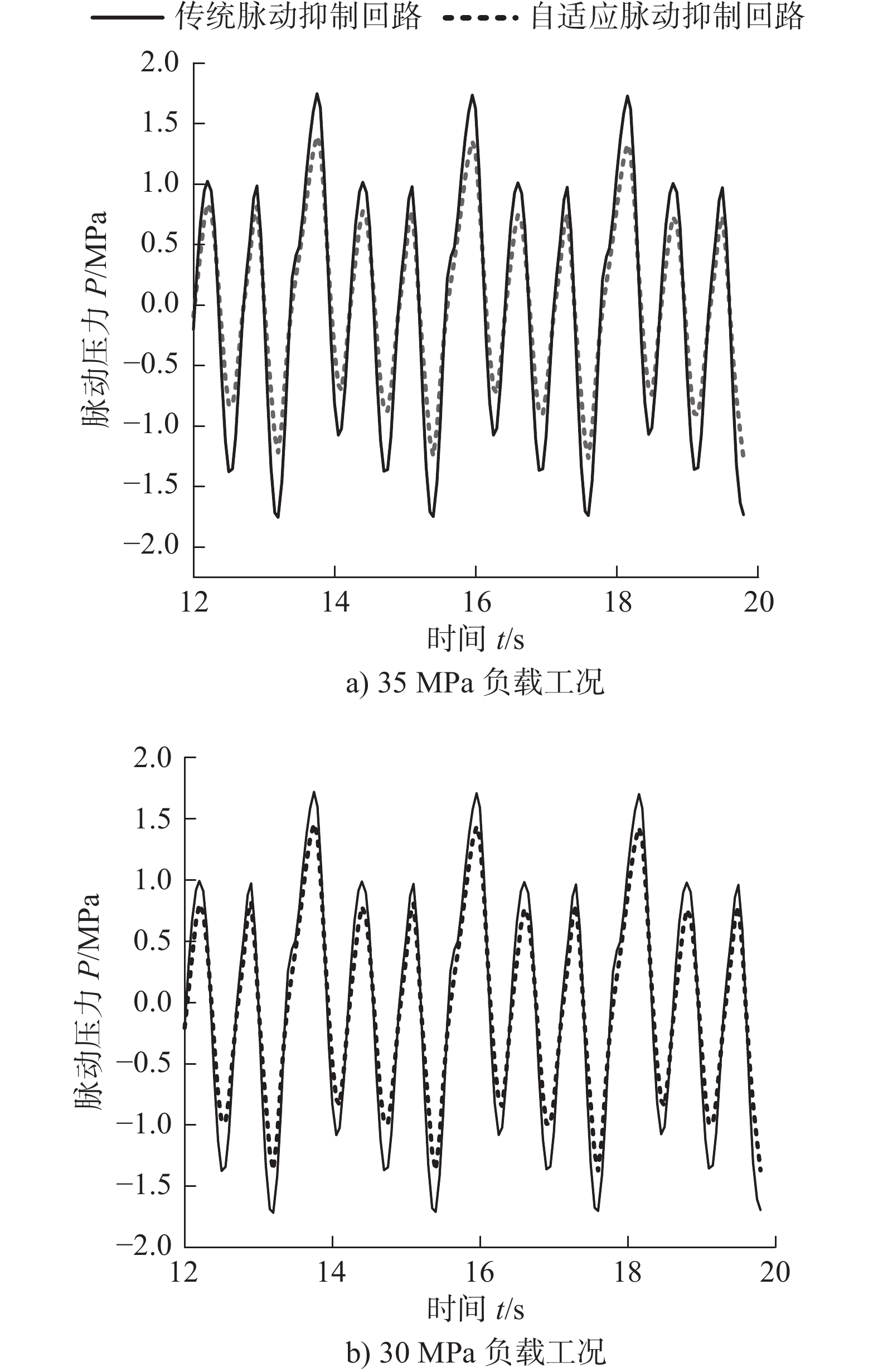
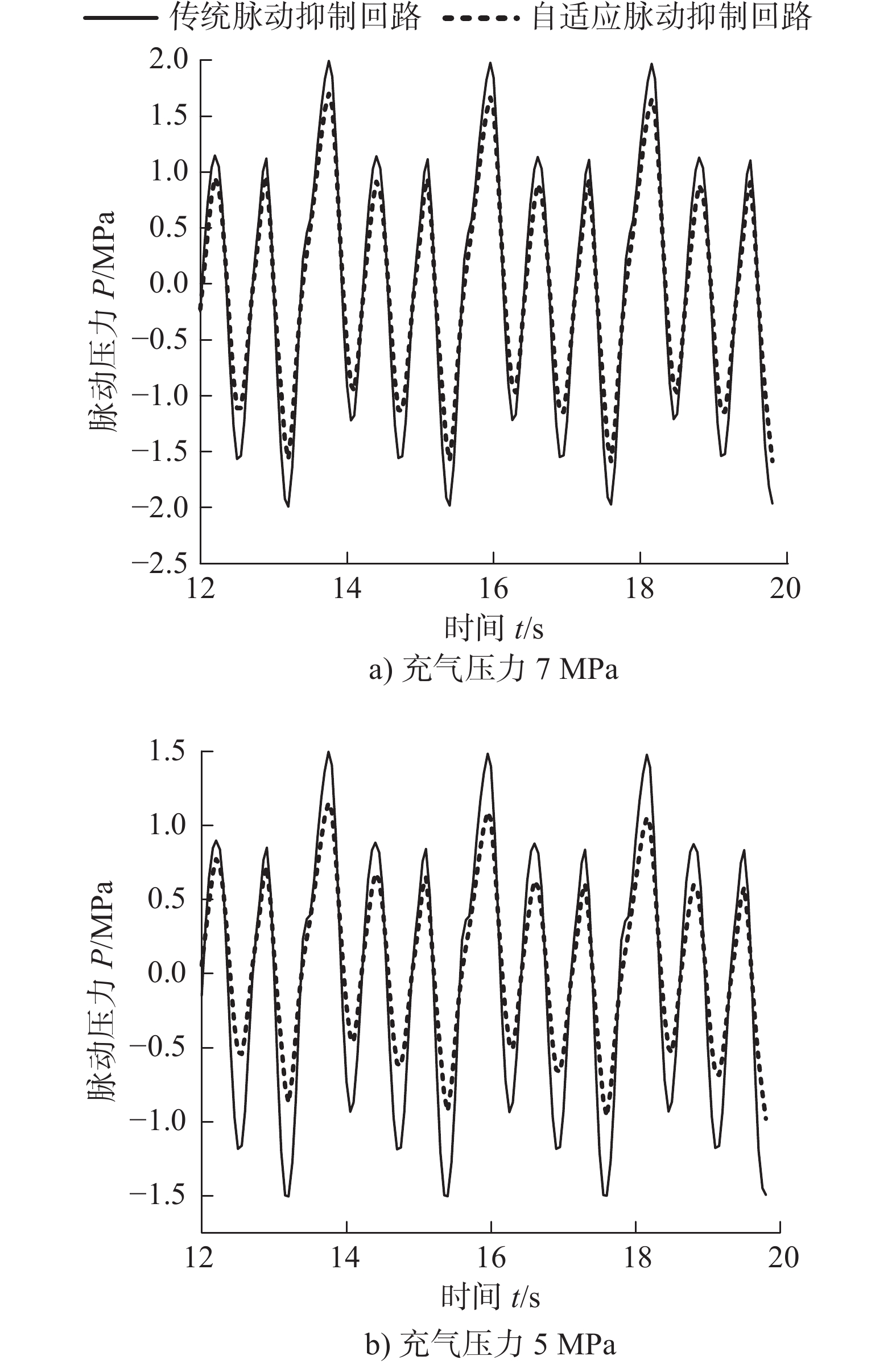
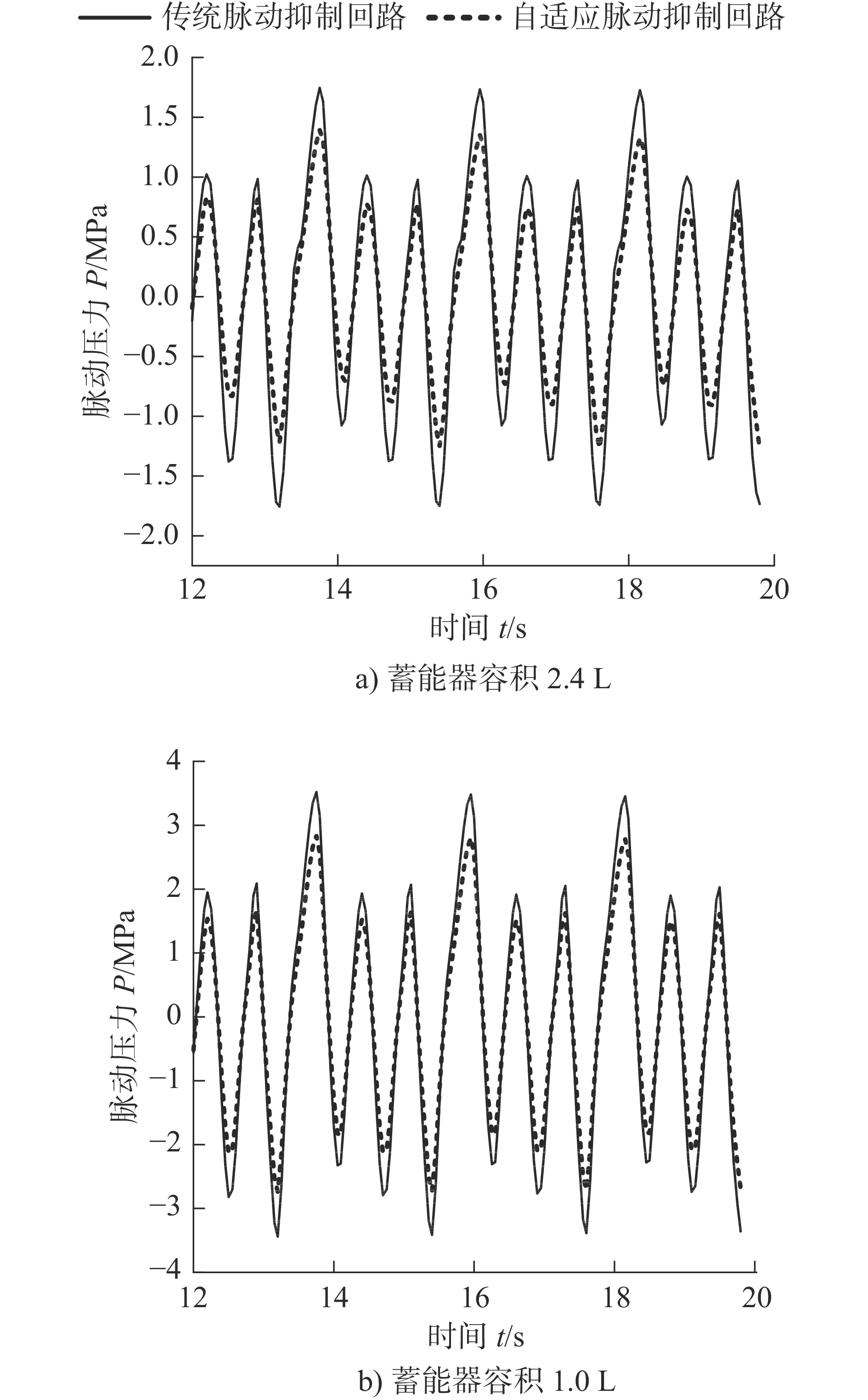
针对液压驱动式压裂泵流体脉动问题,分析了其脉动机理,通过对基于蓄能器-增压缸组合的传统脉动抑制回路进行理论研究,提出了一种基于蓄能器-增压缸组合的自适应脉动抑制方法,并对自适应脉动抑制特性进行理论分析,研究了系统稳态压力等参数的变化对其脉动抑制效果的影响。利用MATLAB/Simulink软件建立脉动抑制回路数学模型,对两种抑制方法进行对比仿真研究,结果表明:相比较基于蓄能器-增压缸组合的脉动抑制方法,自适应方法具有更好优的抑制效果,其脉动压力幅值是传统方法的45% ~ 86%左右,且具有一定的自适应性、良好的稳定性和灵活性。
针对液压驱动式压裂泵流体脉动问题,分析了其脉动机理,通过对基于蓄能器-增压缸组合的传统脉动抑制回路进行理论研究,提出了一种基于蓄能器-增压缸组合的自适应脉动抑制方法,并对自适应脉动抑制特性进行理论分析,研究了系统稳态压力等参数的变化对其脉动抑制效果的影响。利用MATLAB/Simulink软件建立脉动抑制回路数学模型,对两种抑制方法进行对比仿真研究,结果表明:相比较基于蓄能器-增压缸组合的脉动抑制方法,自适应方法具有更好优的抑制效果,其脉动压力幅值是传统方法的45% ~ 86%左右,且具有一定的自适应性、良好的稳定性和灵活性。
2024, 43(5): 812-818.
doi: 10.13433/j.cnki.1003-8728.20220284
摘要:
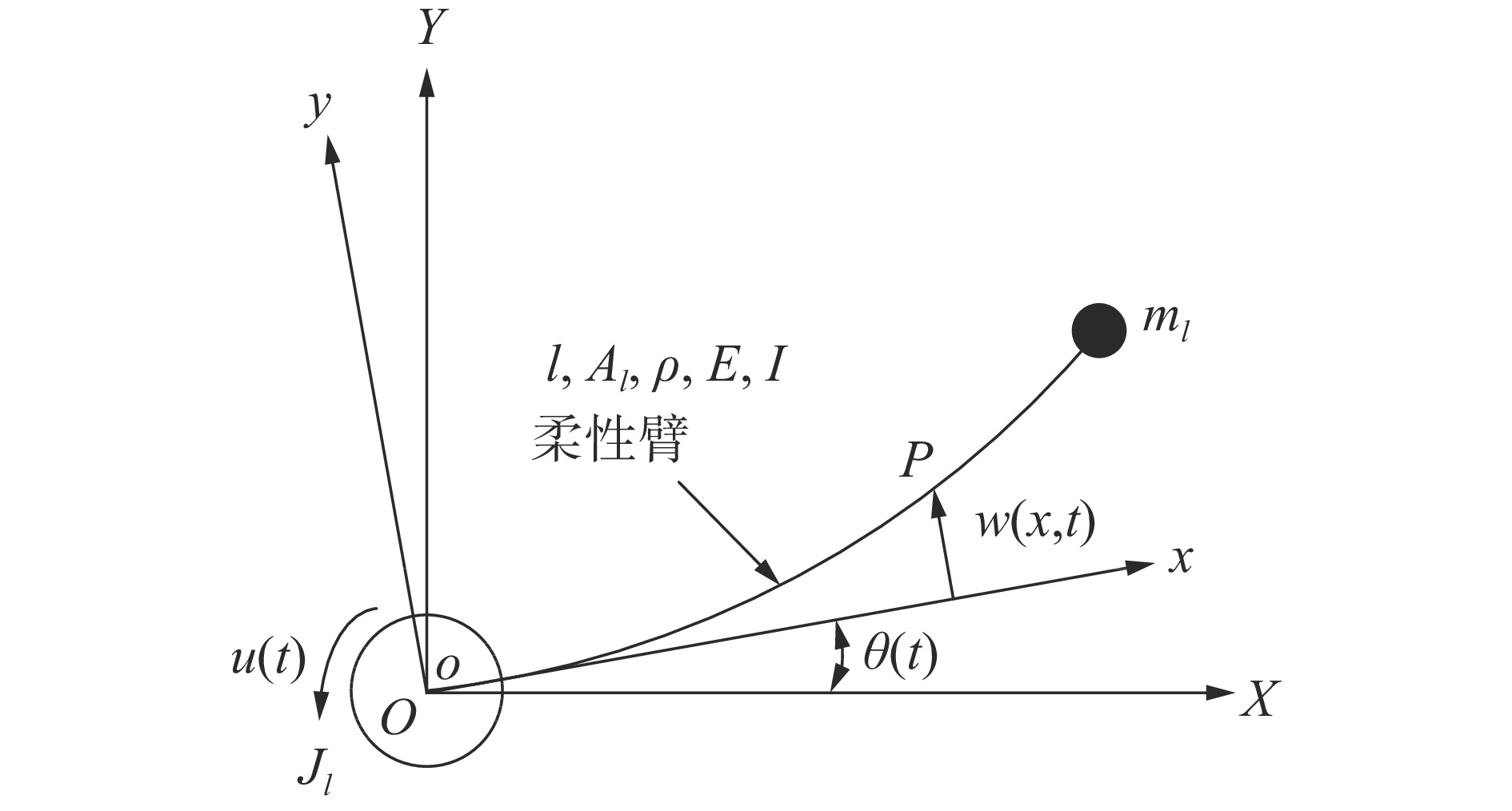
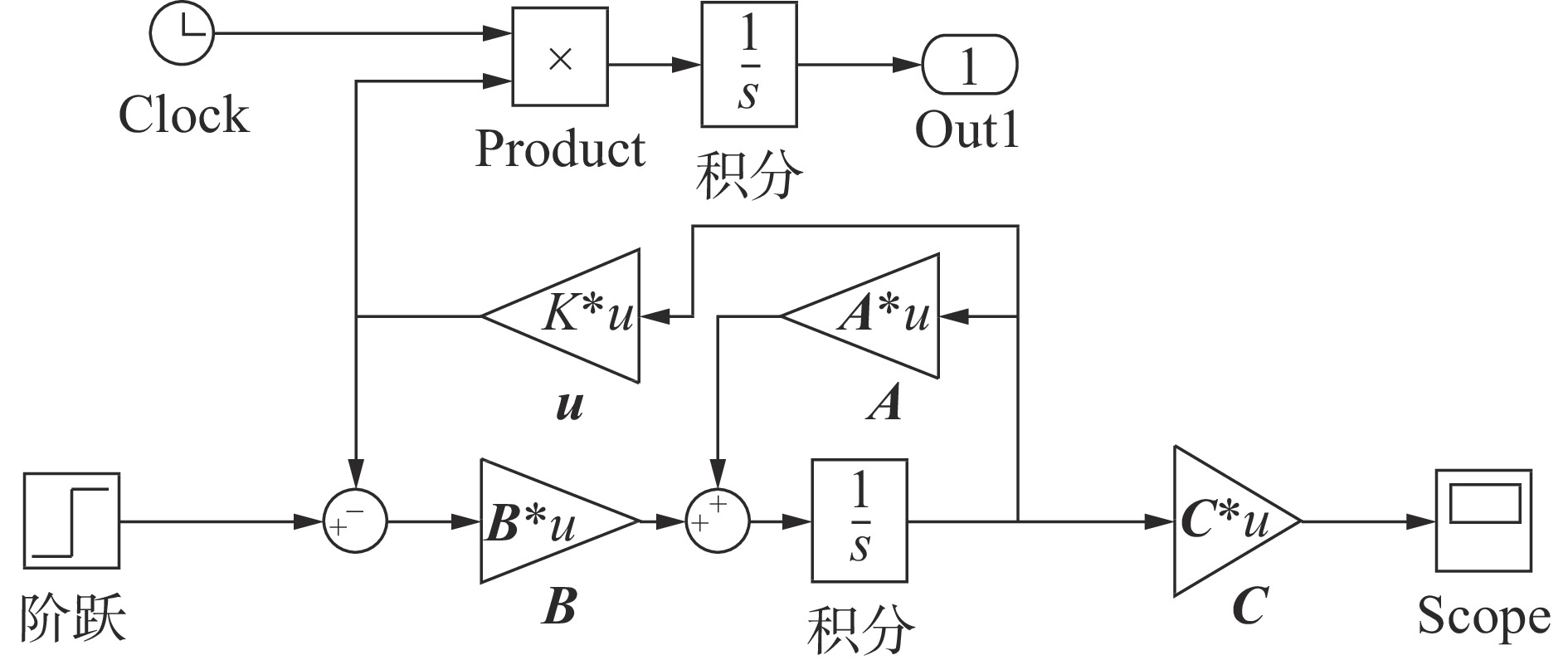
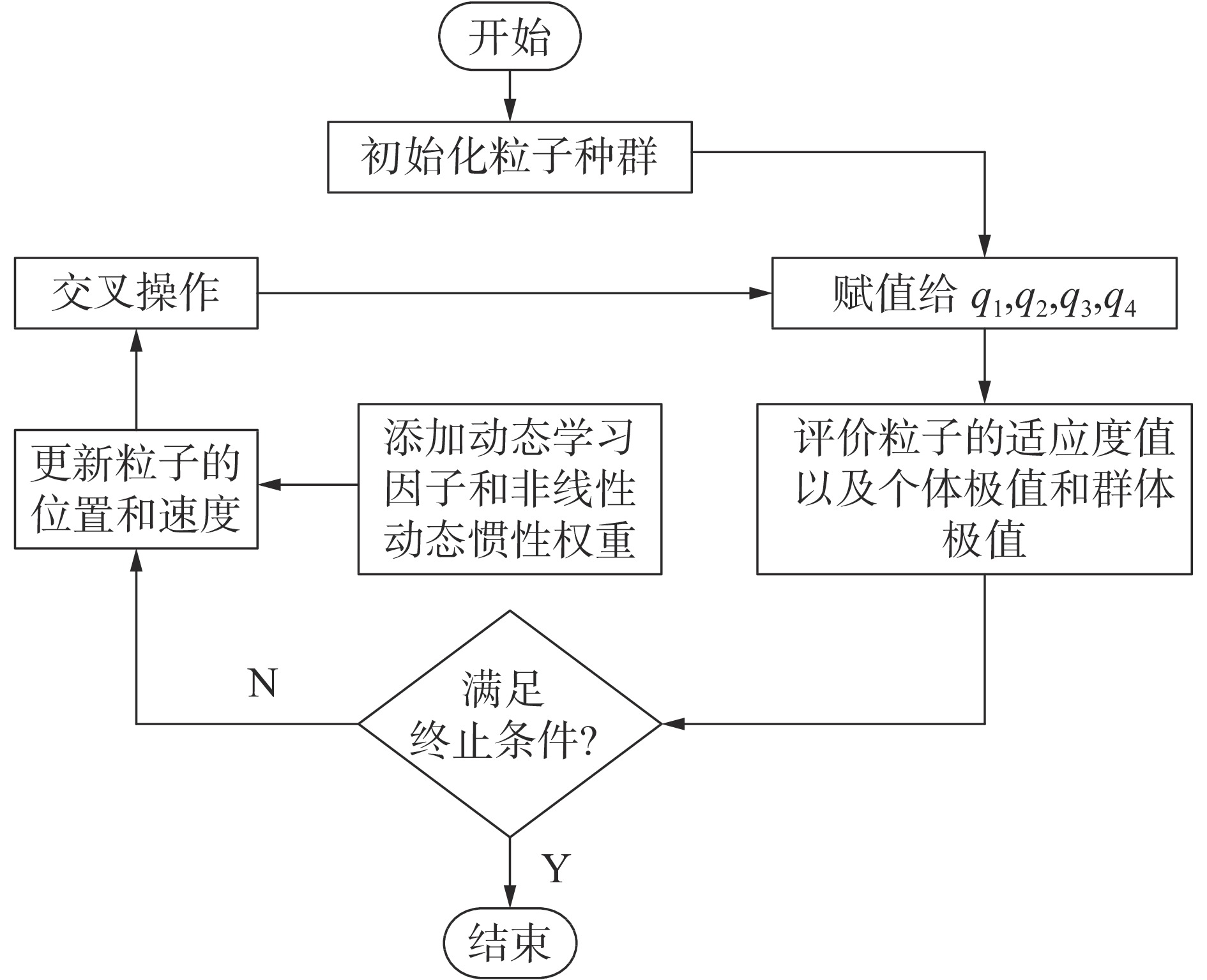
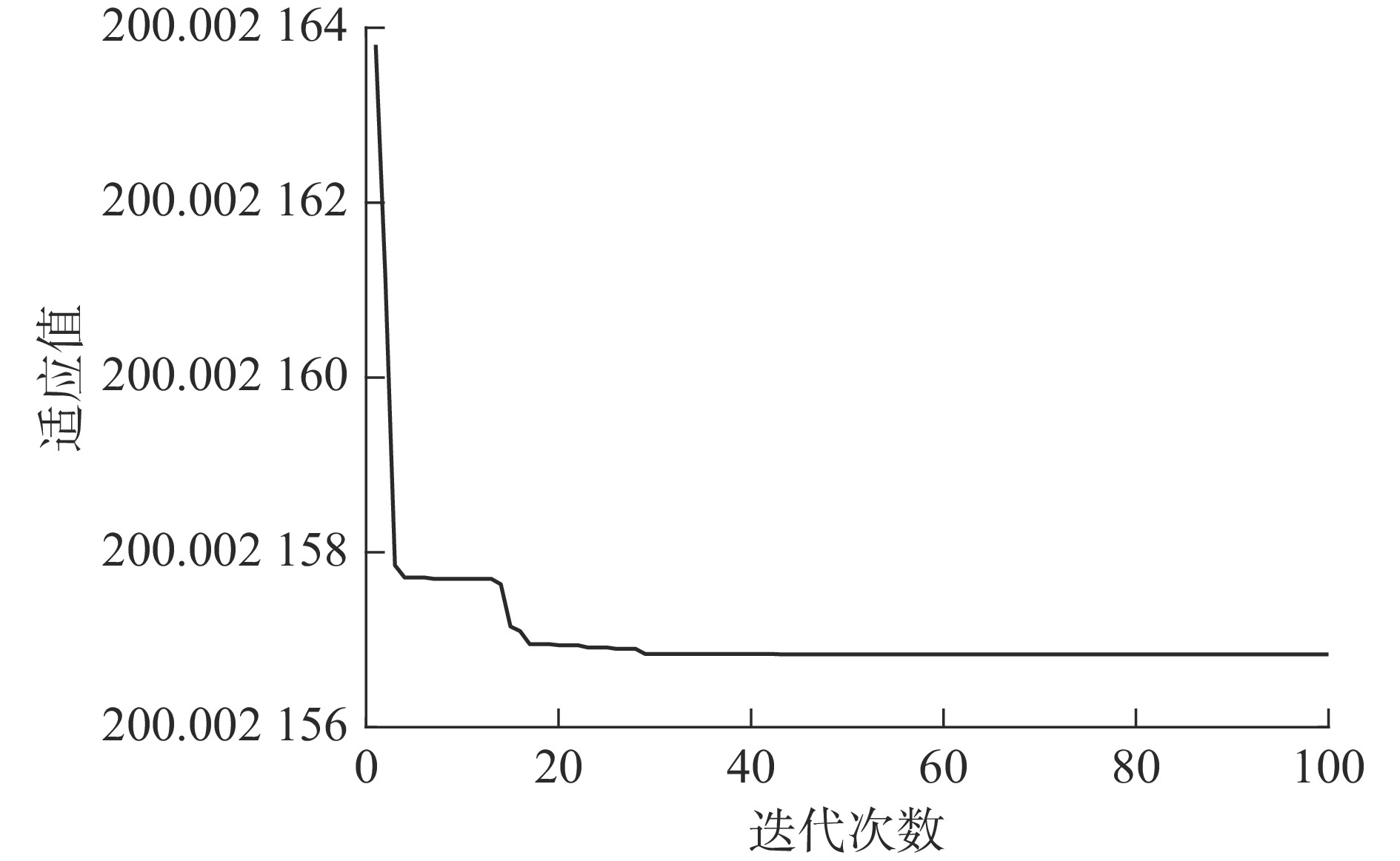
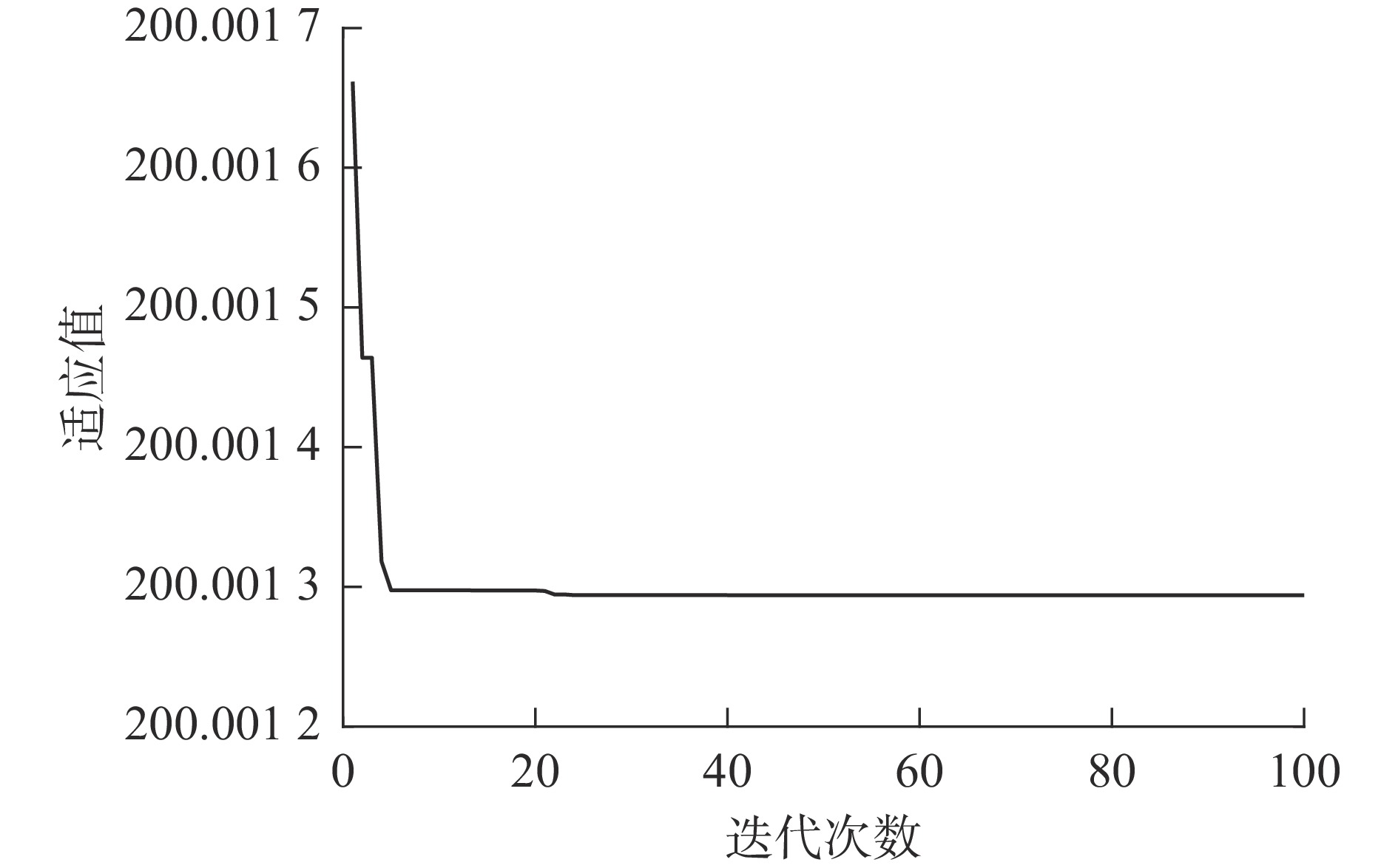
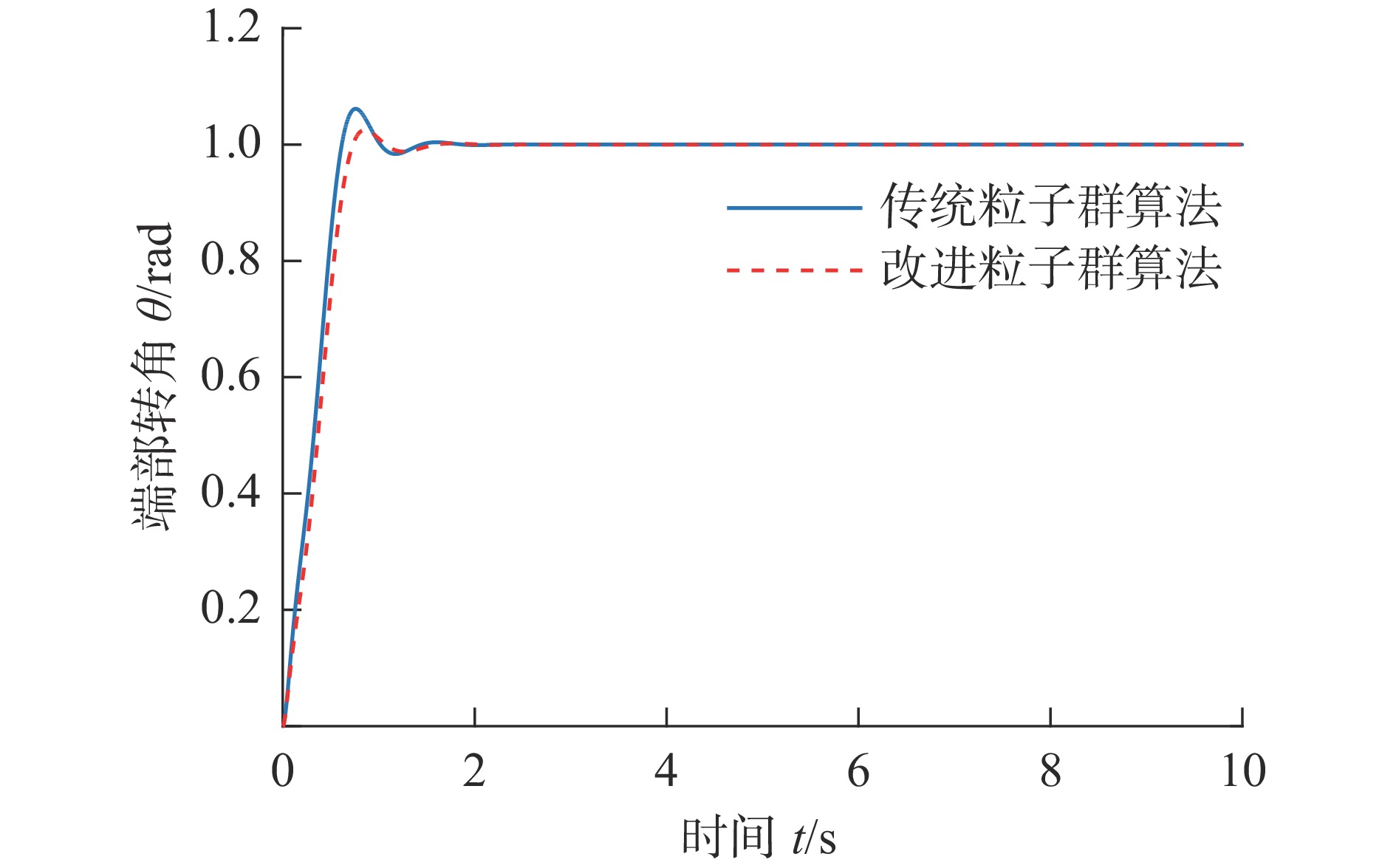
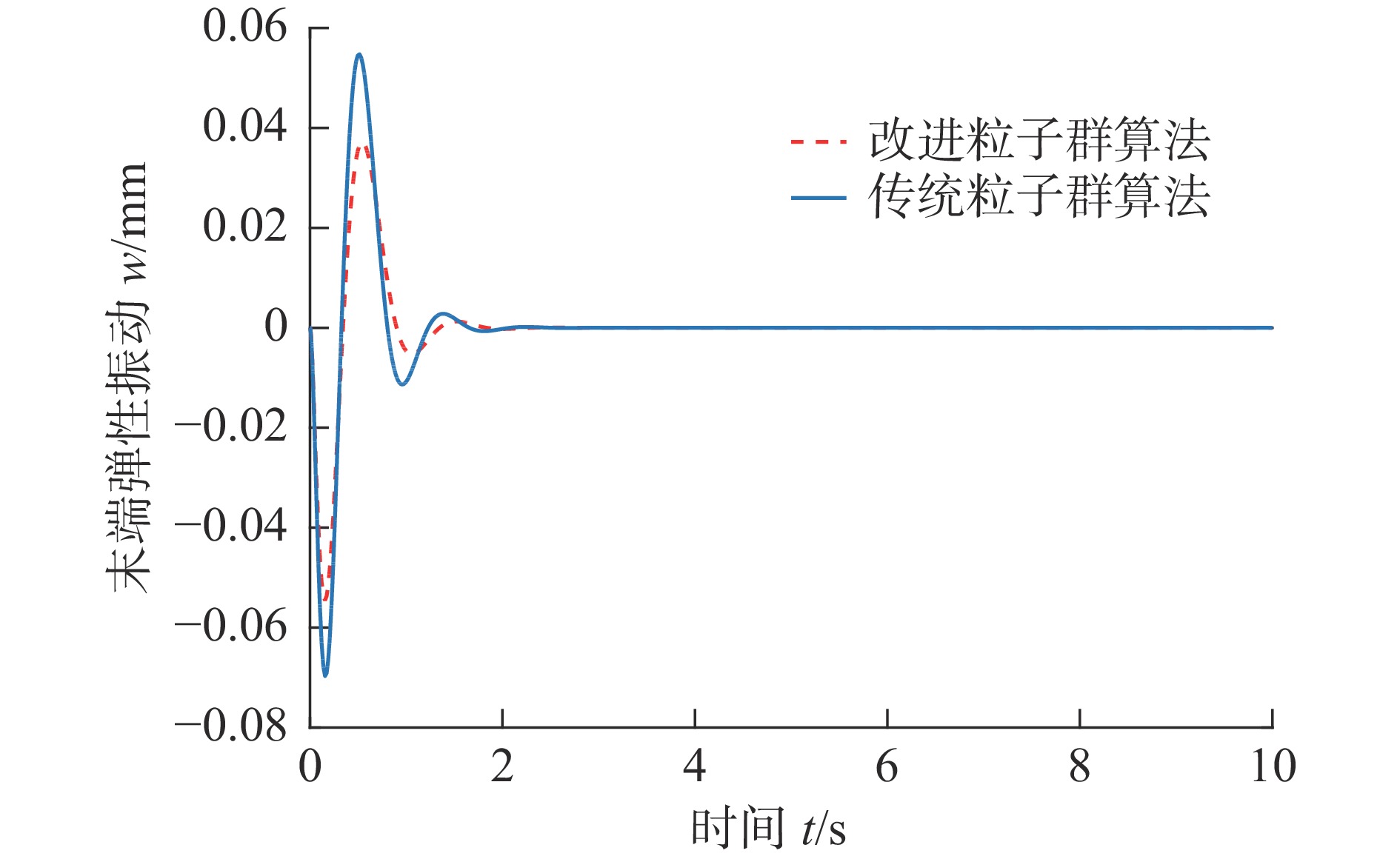
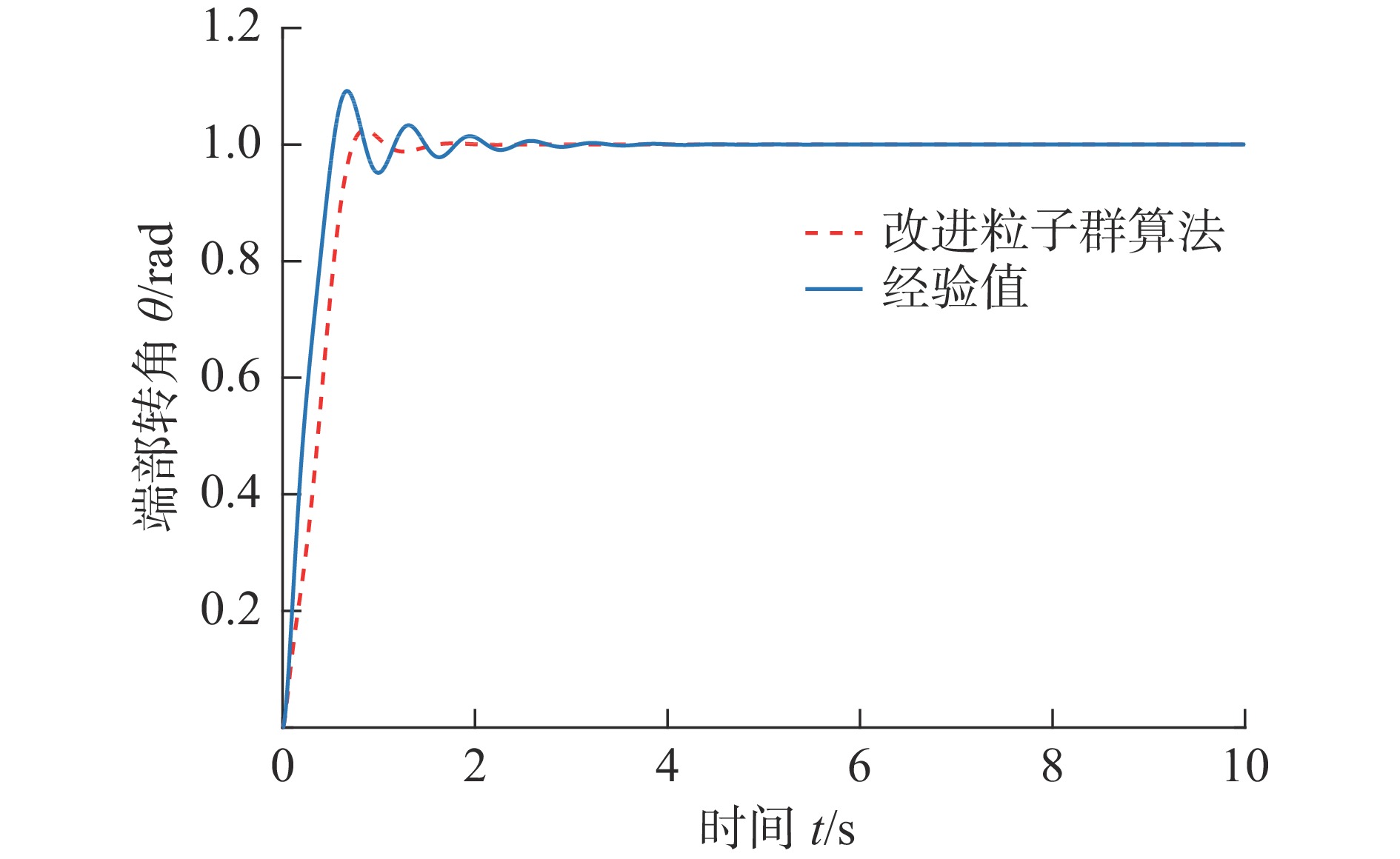
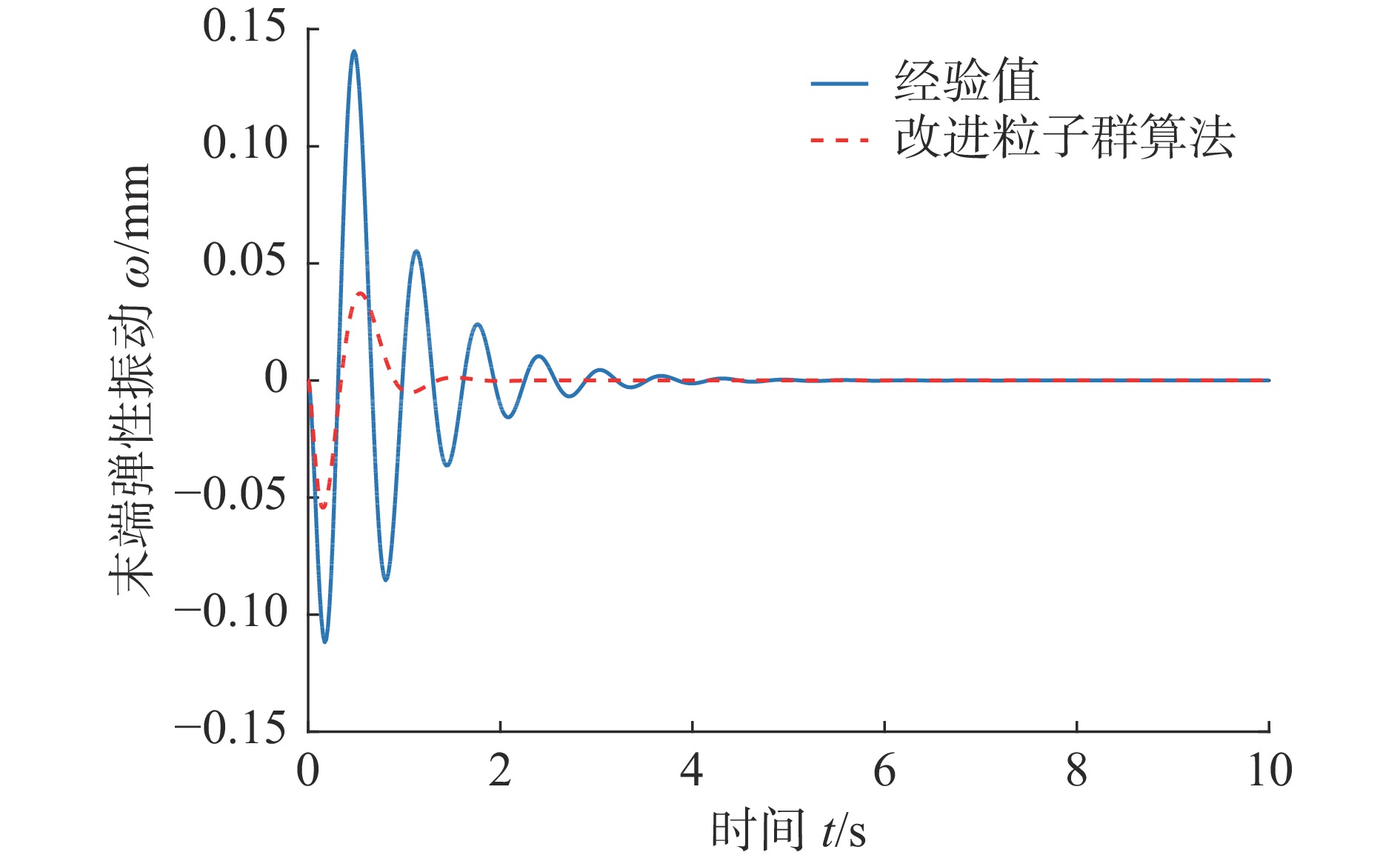
对于传统的线性二次调节器(LQR)控制的柔性机械臂,加权矩阵通常根据先验知识进行选取,粒子群算法可以通过迭代运算自主寻找最优解,传统粒子群算法的收敛速度比较慢,因此本文提出了一种改进粒子群算法优化加权矩阵的方法。使用Lagrange方程建立单杆柔性机械臂的动力学方程,并依据LQR推导出其控制模型。在模型求解中基于传统粒子群算法,引入交叉操作以及非线性动态惯性权重来提高全局和局部搜索能力。最后,通过仿真结果对比分析表明,改进粒子群算法的收敛速度更快,且抑振效果优于传统的粒子群算法,为其更高精度的应用提供辅助与支撑。
对于传统的线性二次调节器(LQR)控制的柔性机械臂,加权矩阵通常根据先验知识进行选取,粒子群算法可以通过迭代运算自主寻找最优解,传统粒子群算法的收敛速度比较慢,因此本文提出了一种改进粒子群算法优化加权矩阵的方法。使用Lagrange方程建立单杆柔性机械臂的动力学方程,并依据LQR推导出其控制模型。在模型求解中基于传统粒子群算法,引入交叉操作以及非线性动态惯性权重来提高全局和局部搜索能力。最后,通过仿真结果对比分析表明,改进粒子群算法的收敛速度更快,且抑振效果优于传统的粒子群算法,为其更高精度的应用提供辅助与支撑。
2024, 43(5): 819-831.
doi: 10.13433/j.cnki.1003-8728.20220283
摘要:
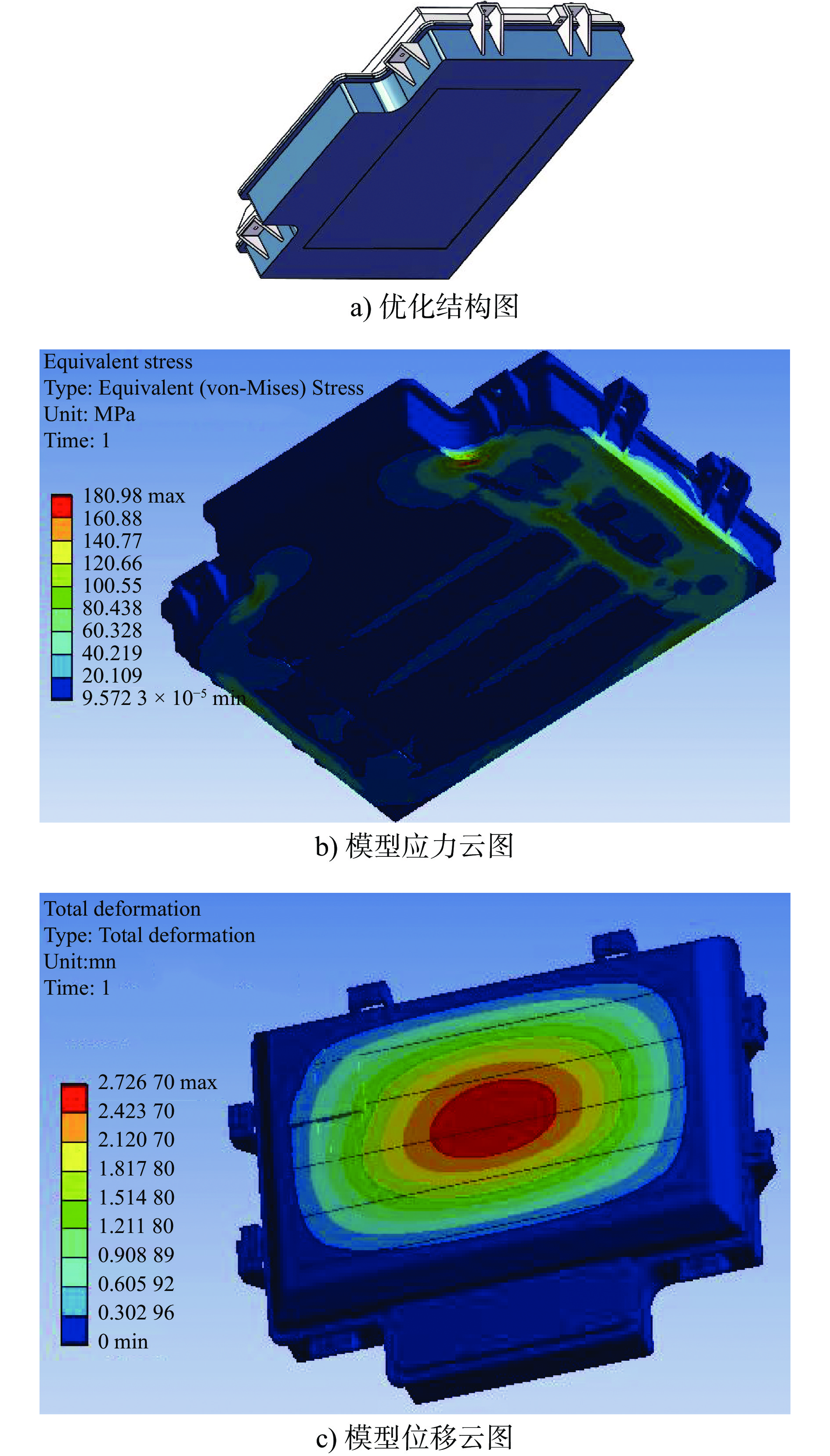
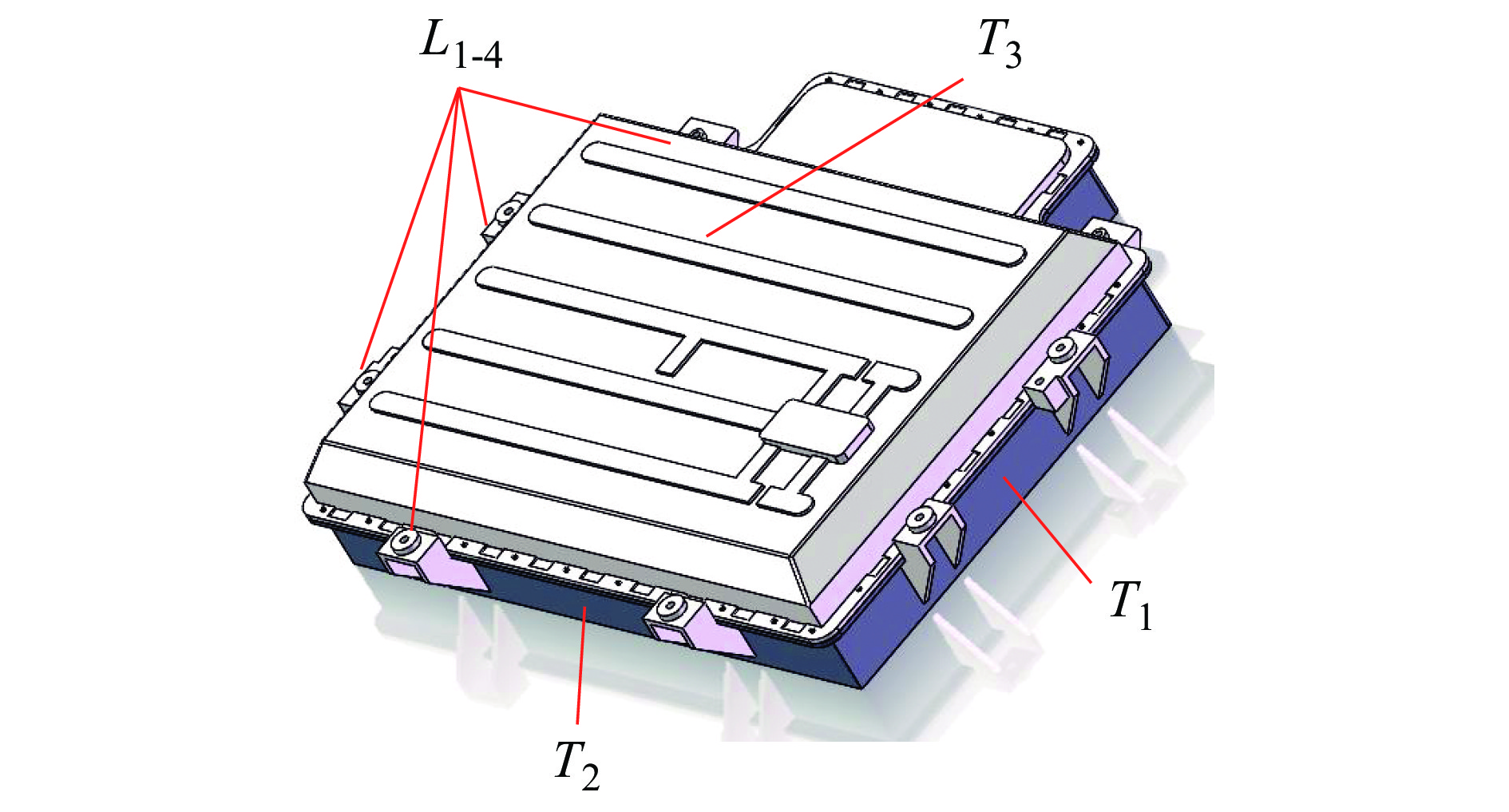
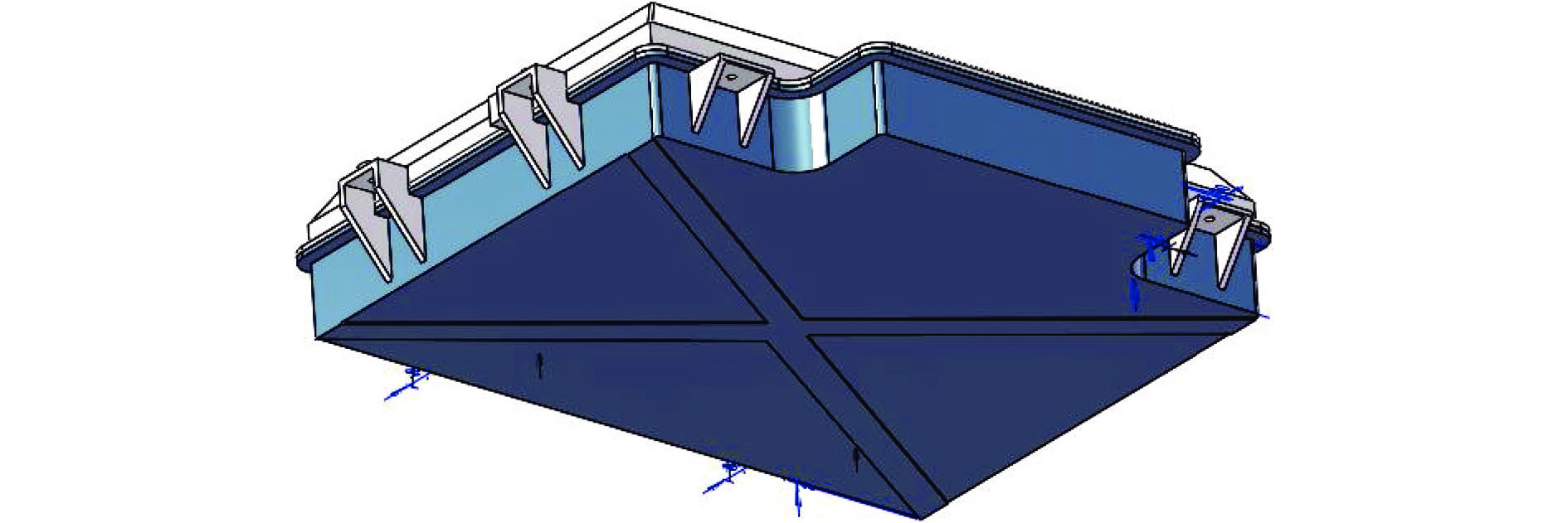
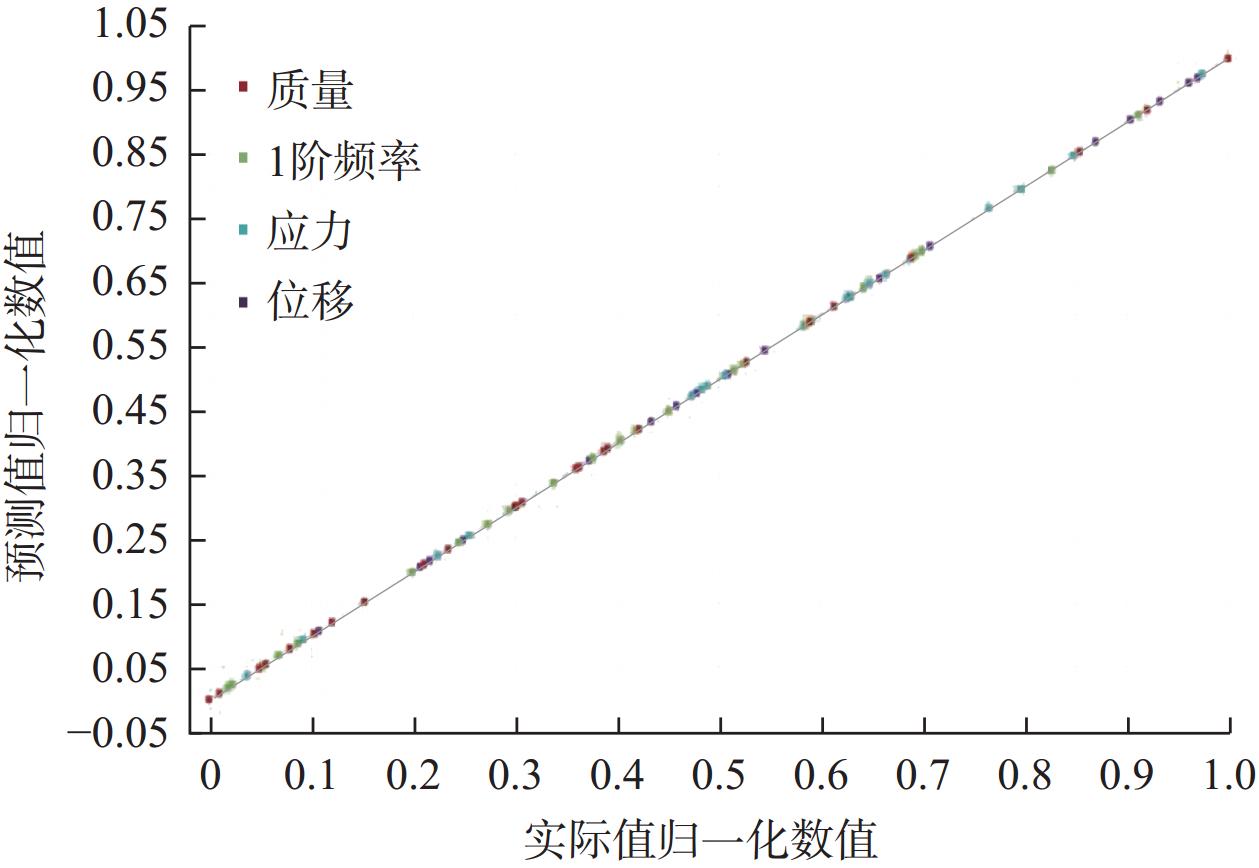
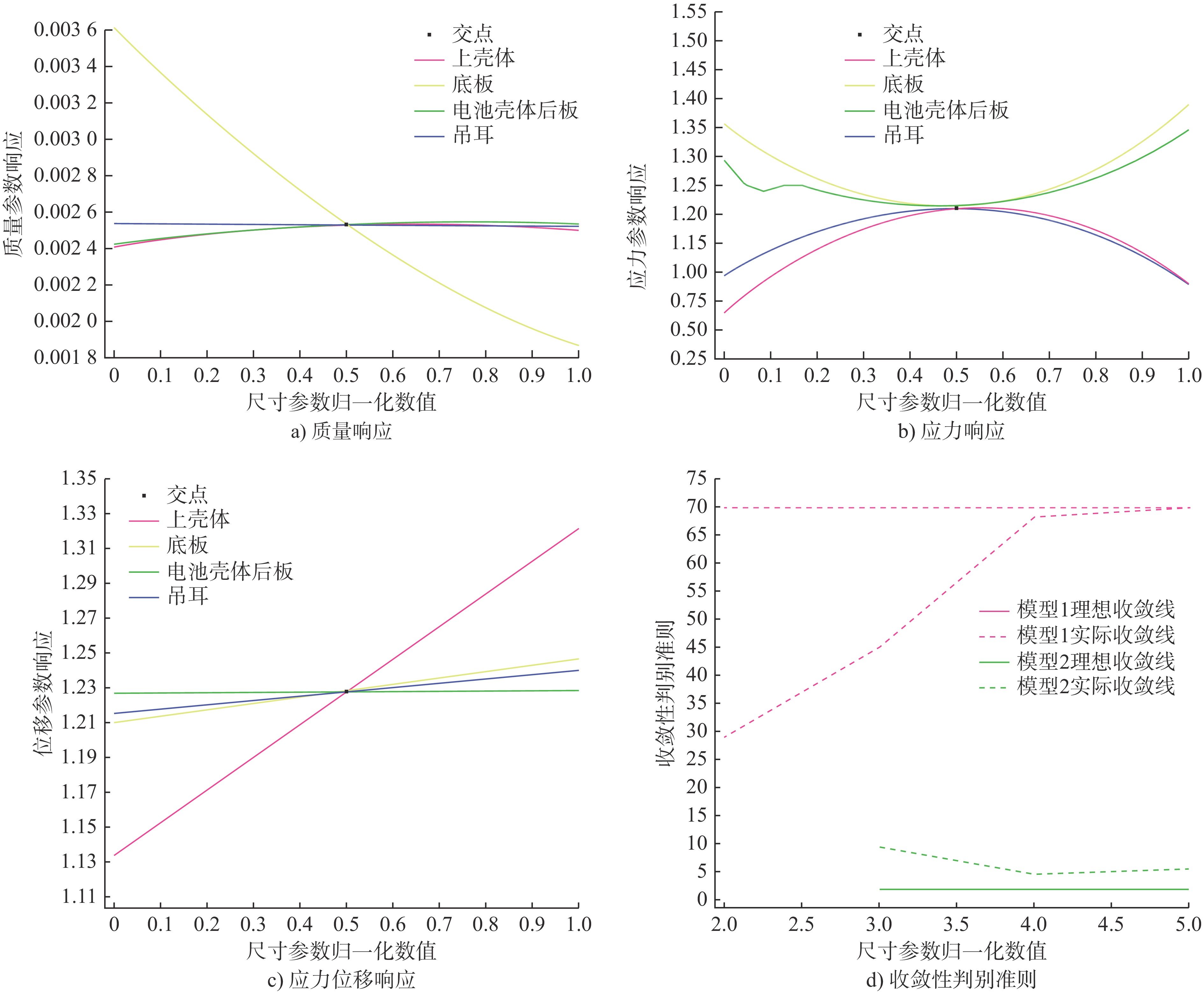
为解决三元锂电池壳厚重与应力集中的问题。本文利用拉丁超立方法对变密度拓扑优化后参数抽样,利用了Pareto排序多目标遗传算法,选择应力等作为目标函数进行迭代计算。本文利用克里格空间插值法得到各响应图谱以及初步预测的优化方案。基于上述结果利用Design-Expert建立了62组响应面数学模型,计算所得帕累托最优为70%,p-value≤0.0001,证明响应面模型的准确性,经仿真计算优化后的结构较原模型各方面性能都有所提升,具有较好的可靠性。
为解决三元锂电池壳厚重与应力集中的问题。本文利用拉丁超立方法对变密度拓扑优化后参数抽样,利用了Pareto排序多目标遗传算法,选择应力等作为目标函数进行迭代计算。本文利用克里格空间插值法得到各响应图谱以及初步预测的优化方案。基于上述结果利用Design-Expert建立了62组响应面数学模型,计算所得帕累托最优为70%,p-value≤0.0001,证明响应面模型的准确性,经仿真计算优化后的结构较原模型各方面性能都有所提升,具有较好的可靠性。








2024, 43(5): 832-836.
doi: 10.13433/j.cnki.1003-8728.20220292
摘要:
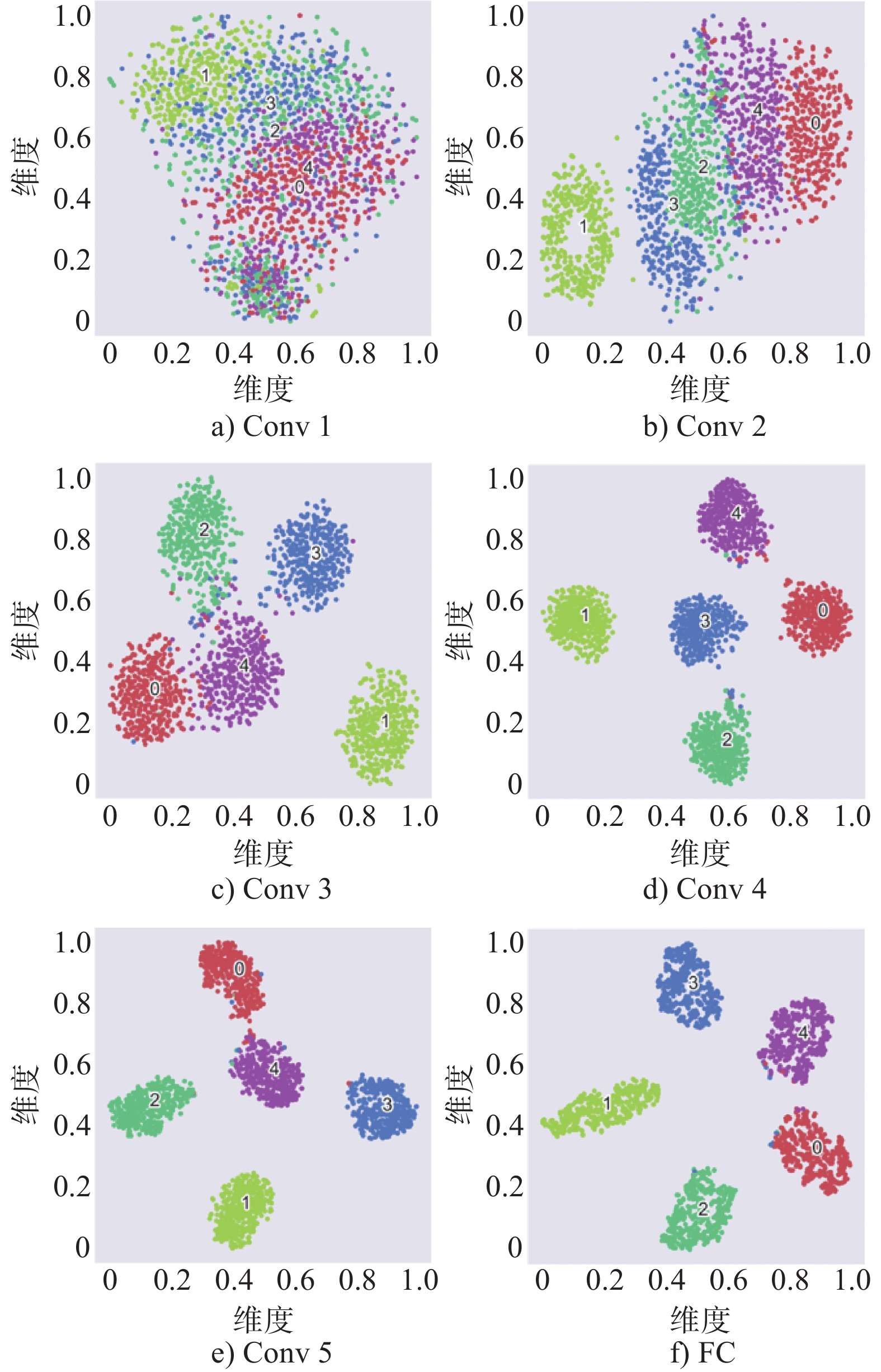
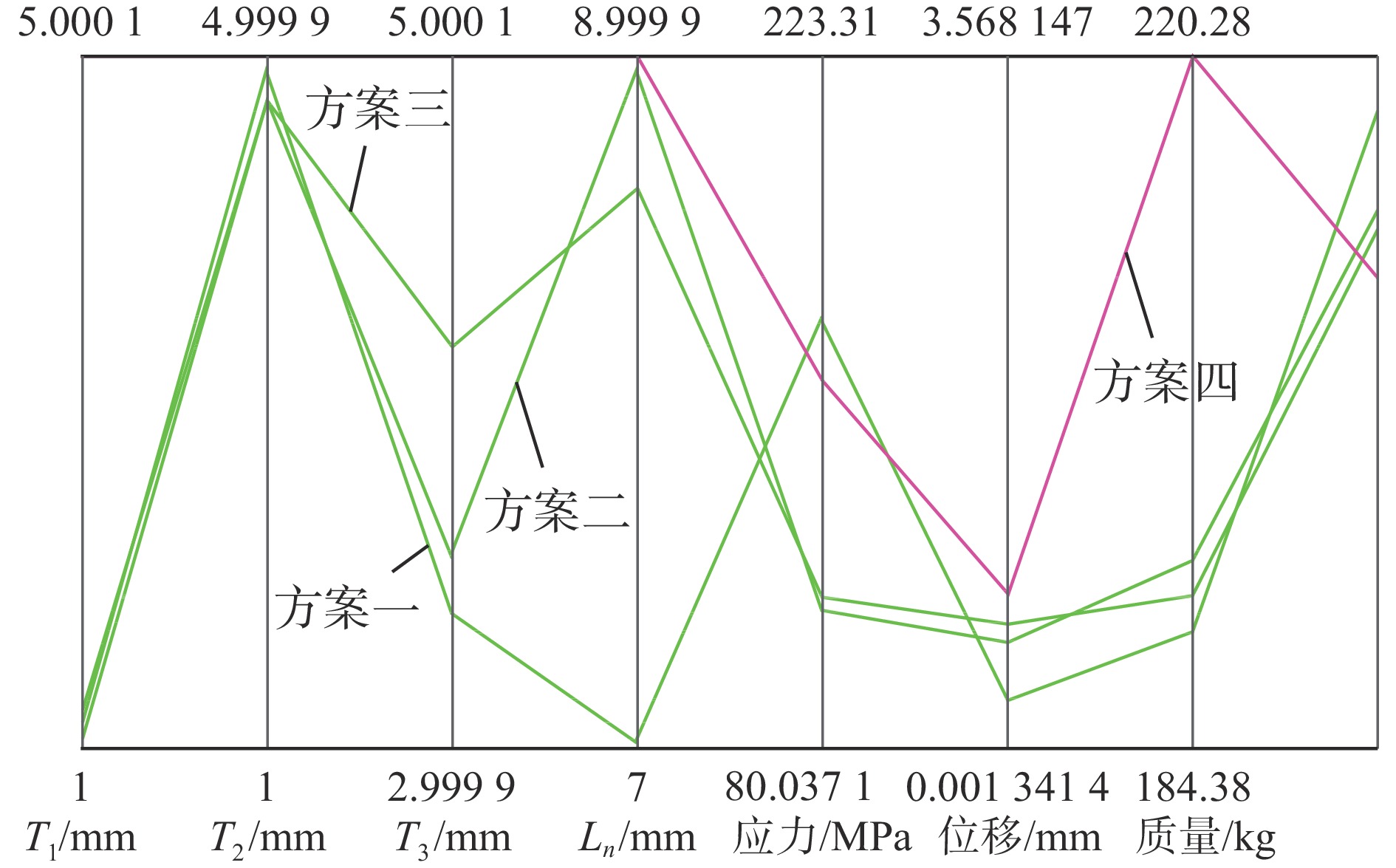
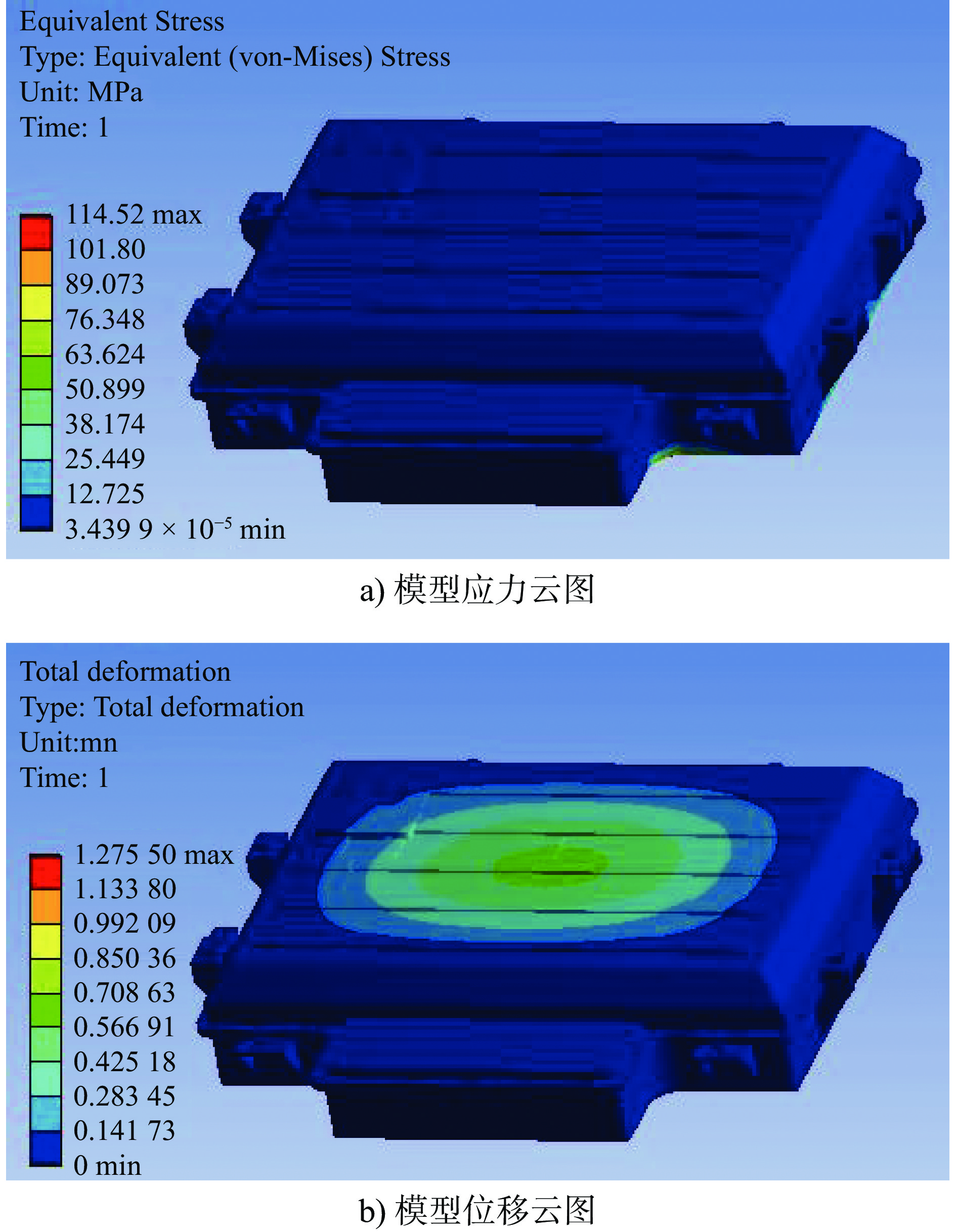
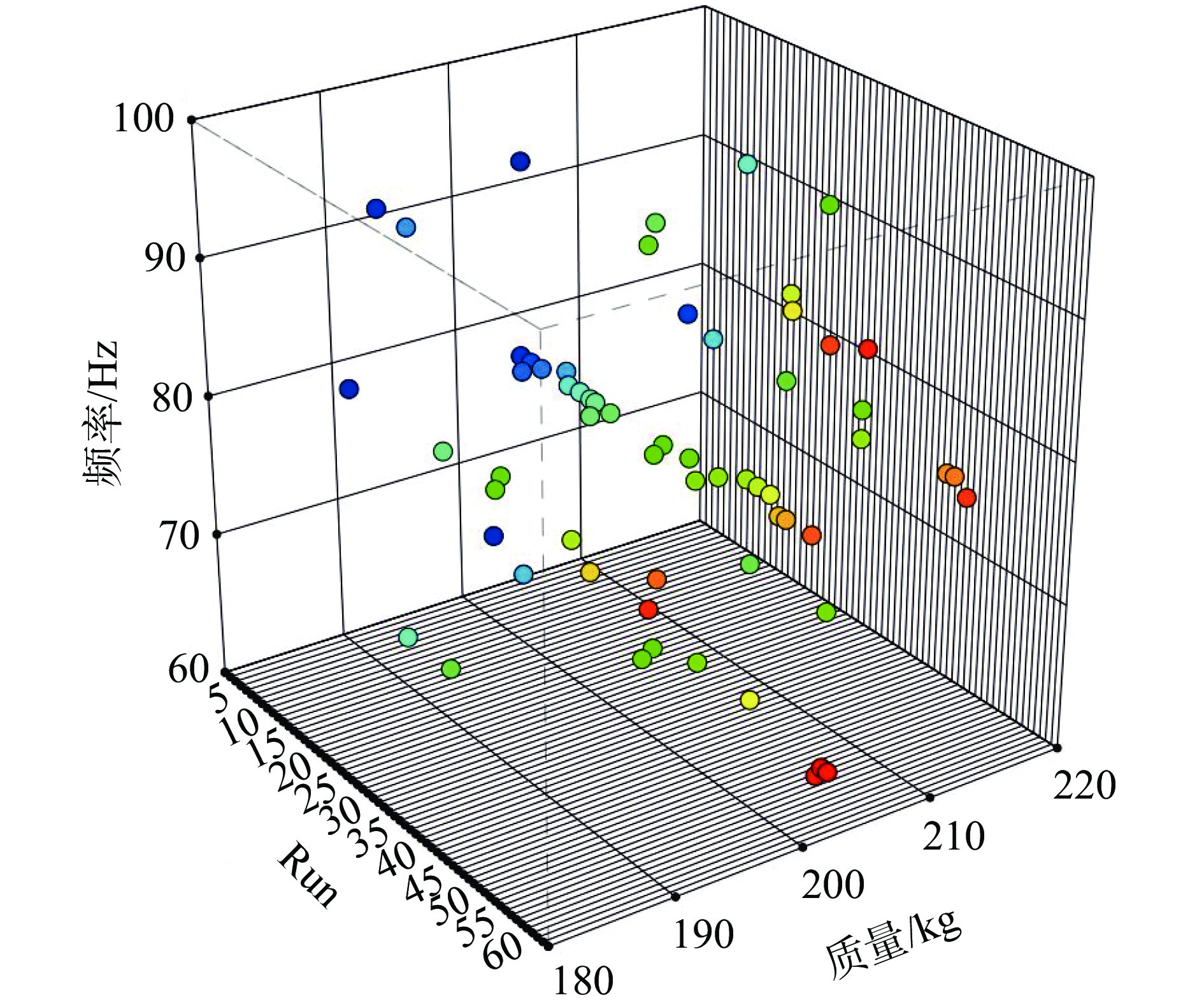
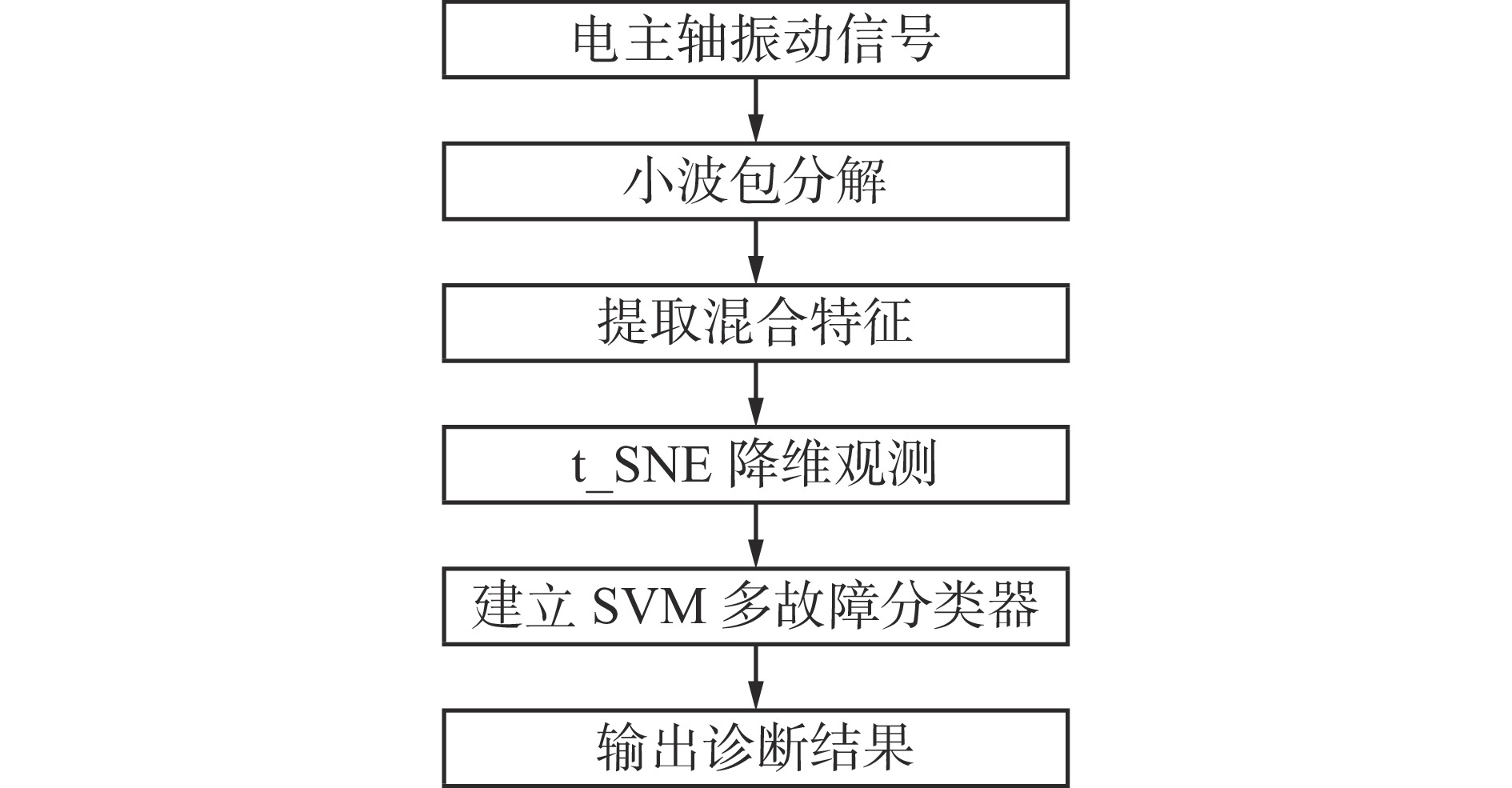
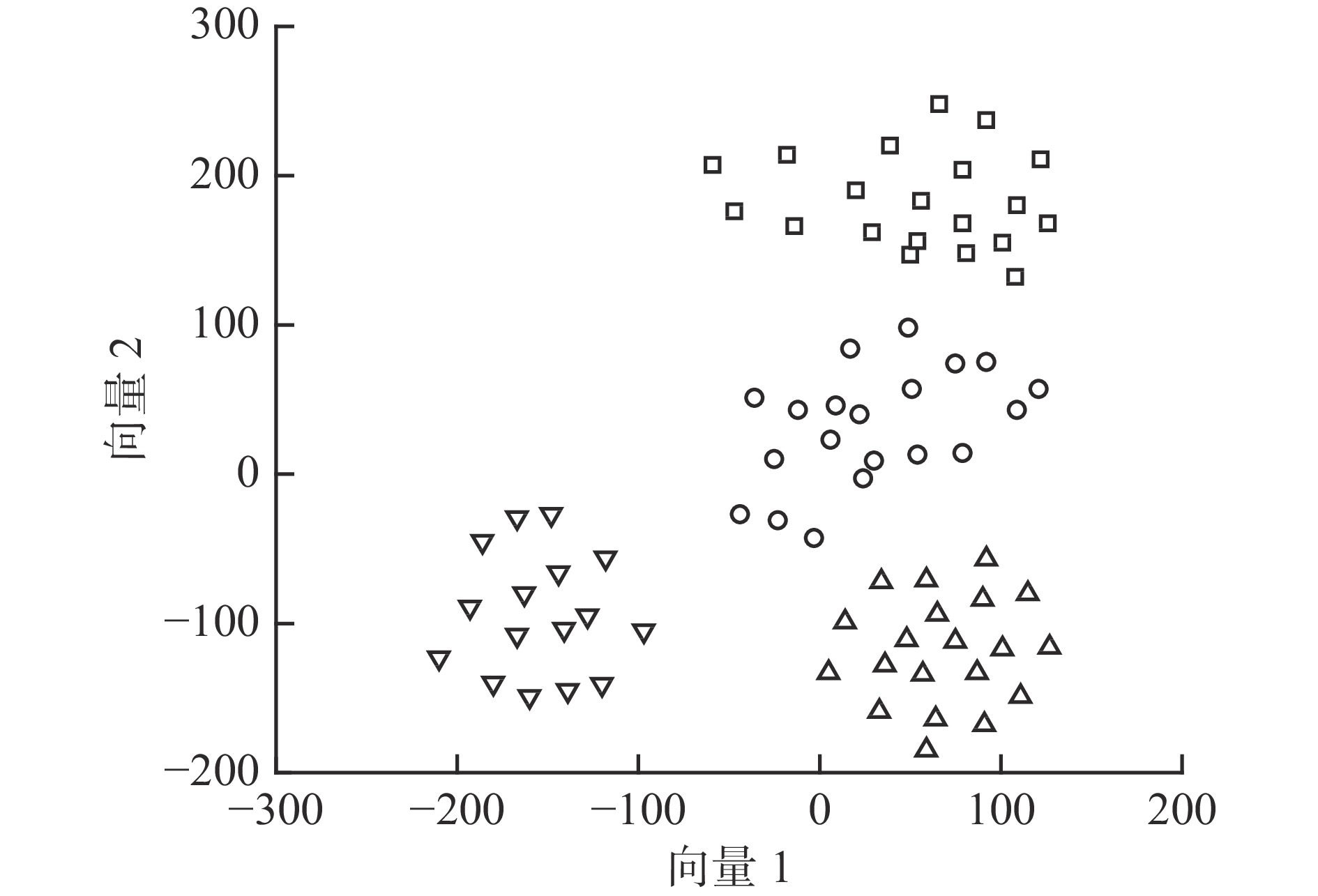
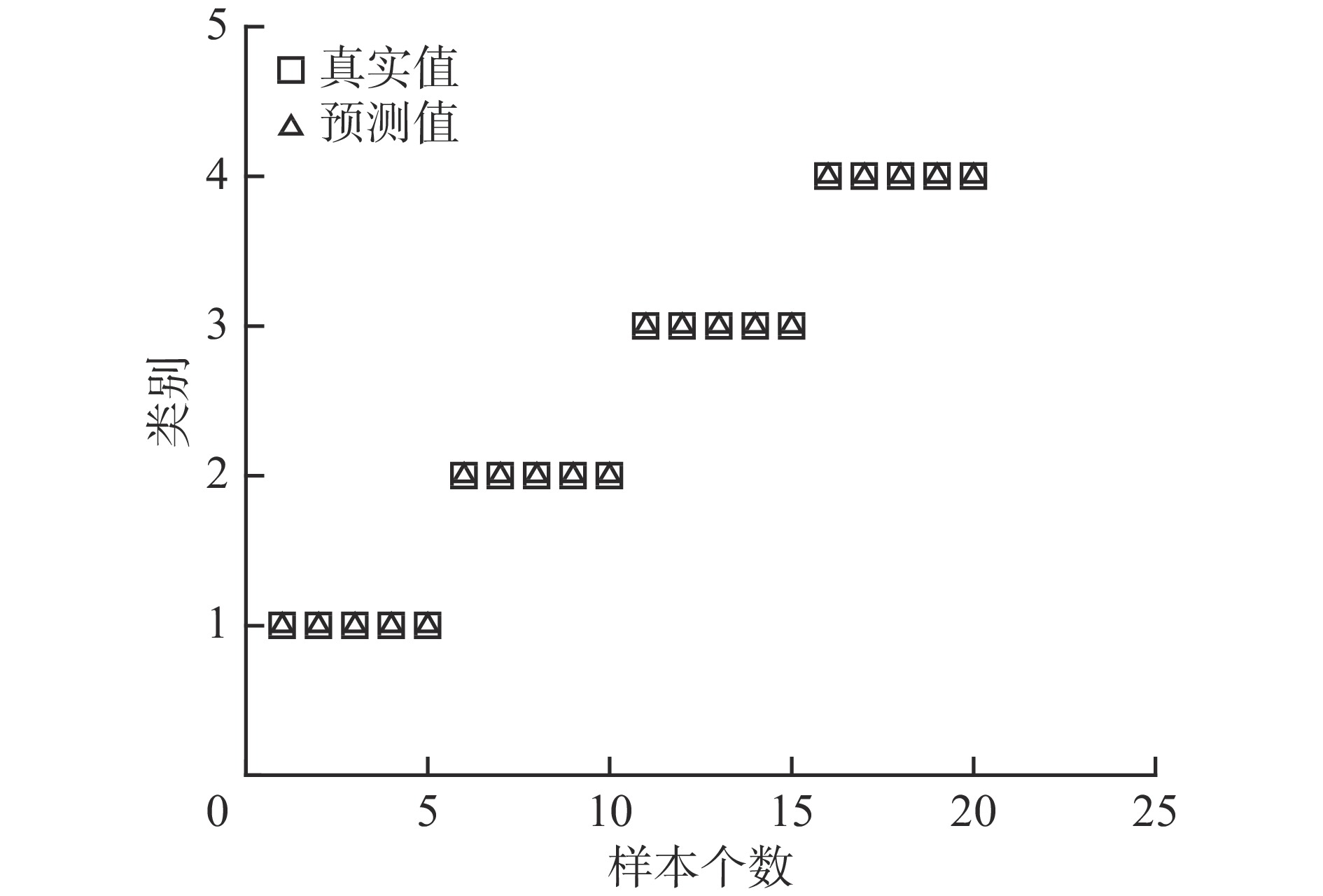
为了提高数控机床电动主轴故障诊断效率,设计了一种WPD-TSNE-SVM组合模型。利用小波包方法分解主轴振动信号,并完成样本集TSNE降维的过程,利用SVM完成重构特征的故障分类。构建数控机床主轴信号混合特征空间向量,并进行故障诊断分析。研究结果表明:TSNE方法训练样数据形成规律分布特点,采用非线性SVM多故障分类器实现小波包混合特征的故障准确分类。根据径向基核函数建立的非线性SVM诊断方法获得更高准确率。该方法诊断轴承运行故障,获得更高维护效率,确保数控机床主轴运行稳定性。
为了提高数控机床电动主轴故障诊断效率,设计了一种WPD-TSNE-SVM组合模型。利用小波包方法分解主轴振动信号,并完成样本集TSNE降维的过程,利用SVM完成重构特征的故障分类。构建数控机床主轴信号混合特征空间向量,并进行故障诊断分析。研究结果表明:TSNE方法训练样数据形成规律分布特点,采用非线性SVM多故障分类器实现小波包混合特征的故障准确分类。根据径向基核函数建立的非线性SVM诊断方法获得更高准确率。该方法诊断轴承运行故障,获得更高维护效率,确保数控机床主轴运行稳定性。
2024, 43(5): 837-843.
doi: 10.13433/j.cnki.1003-8728.20230042
摘要:
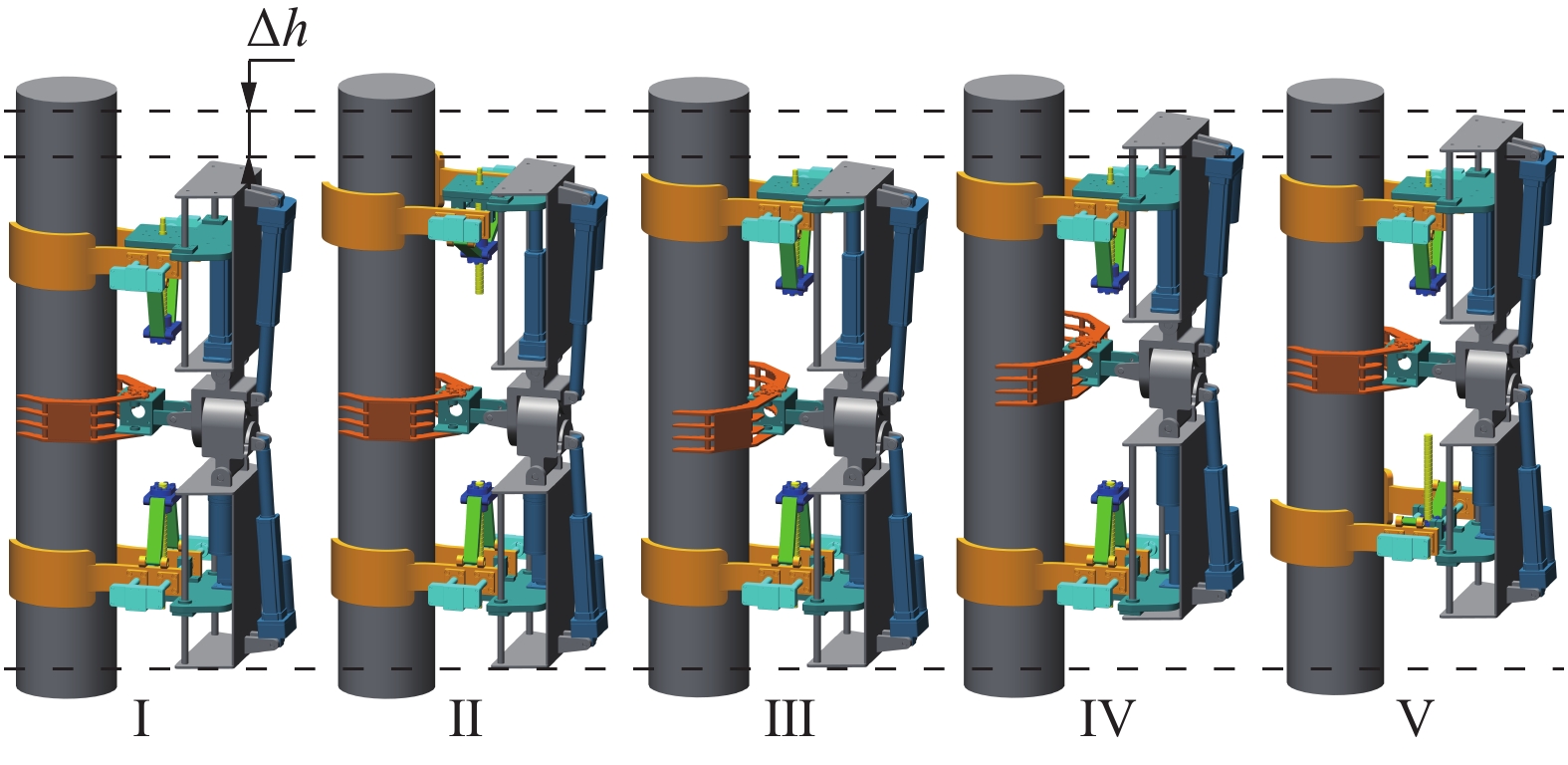
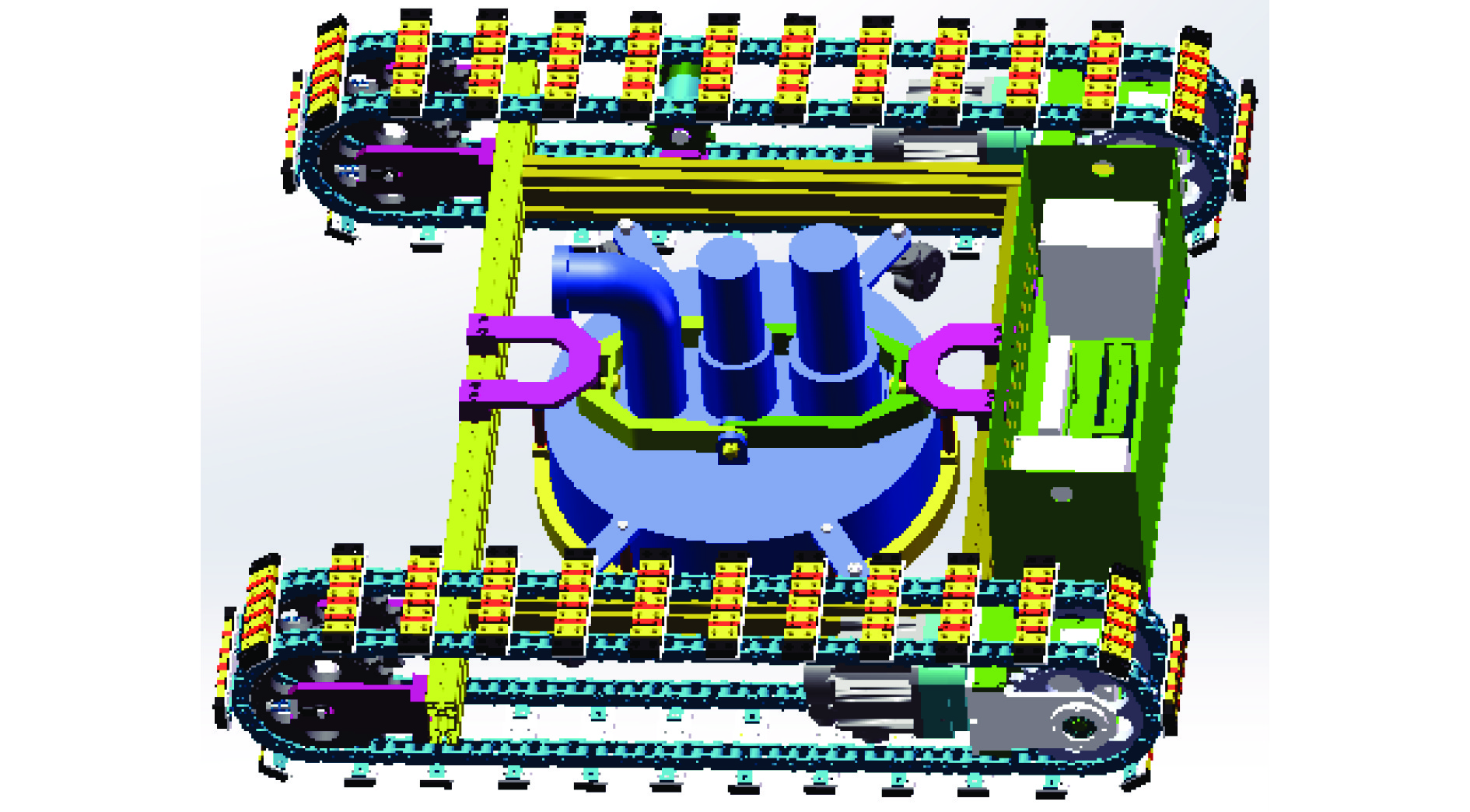
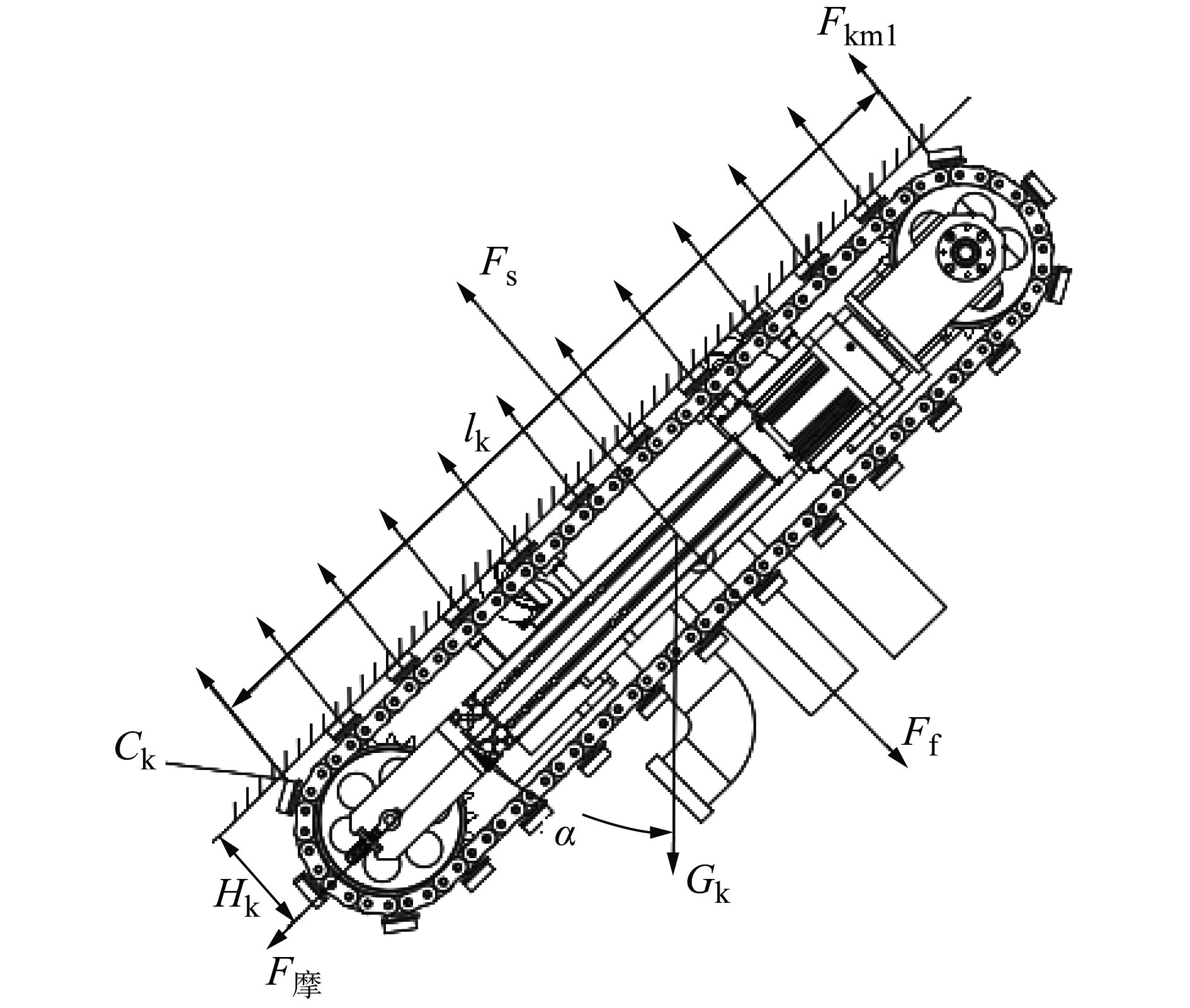
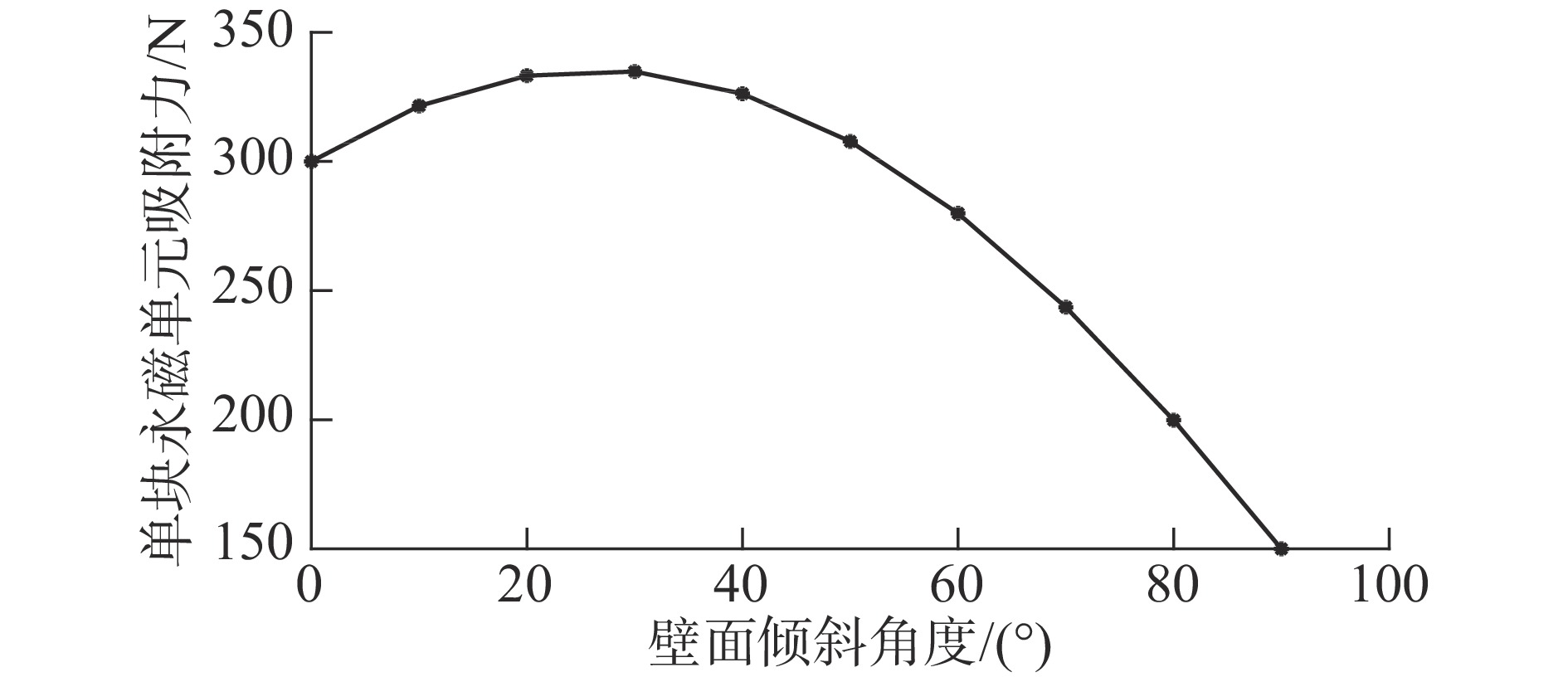
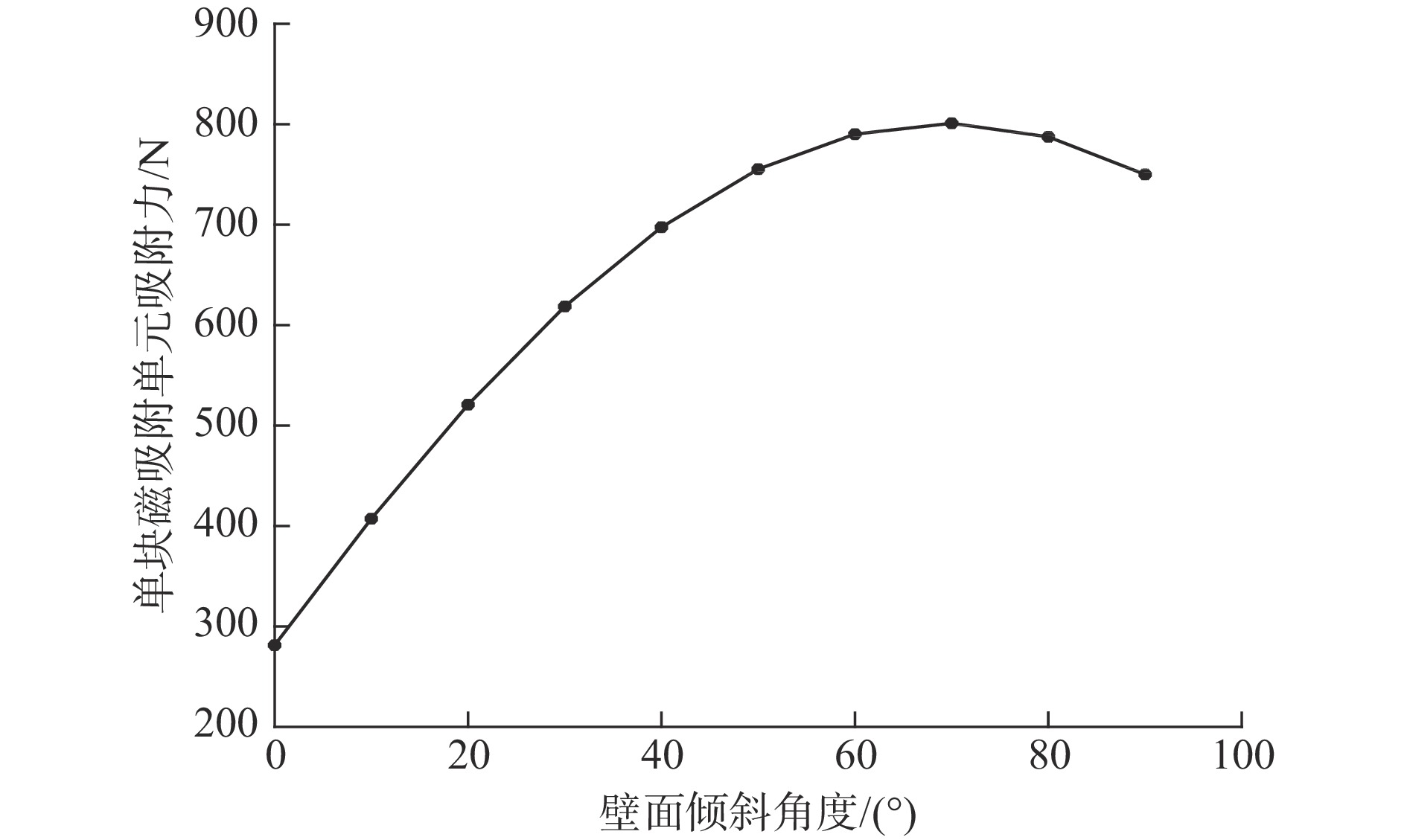
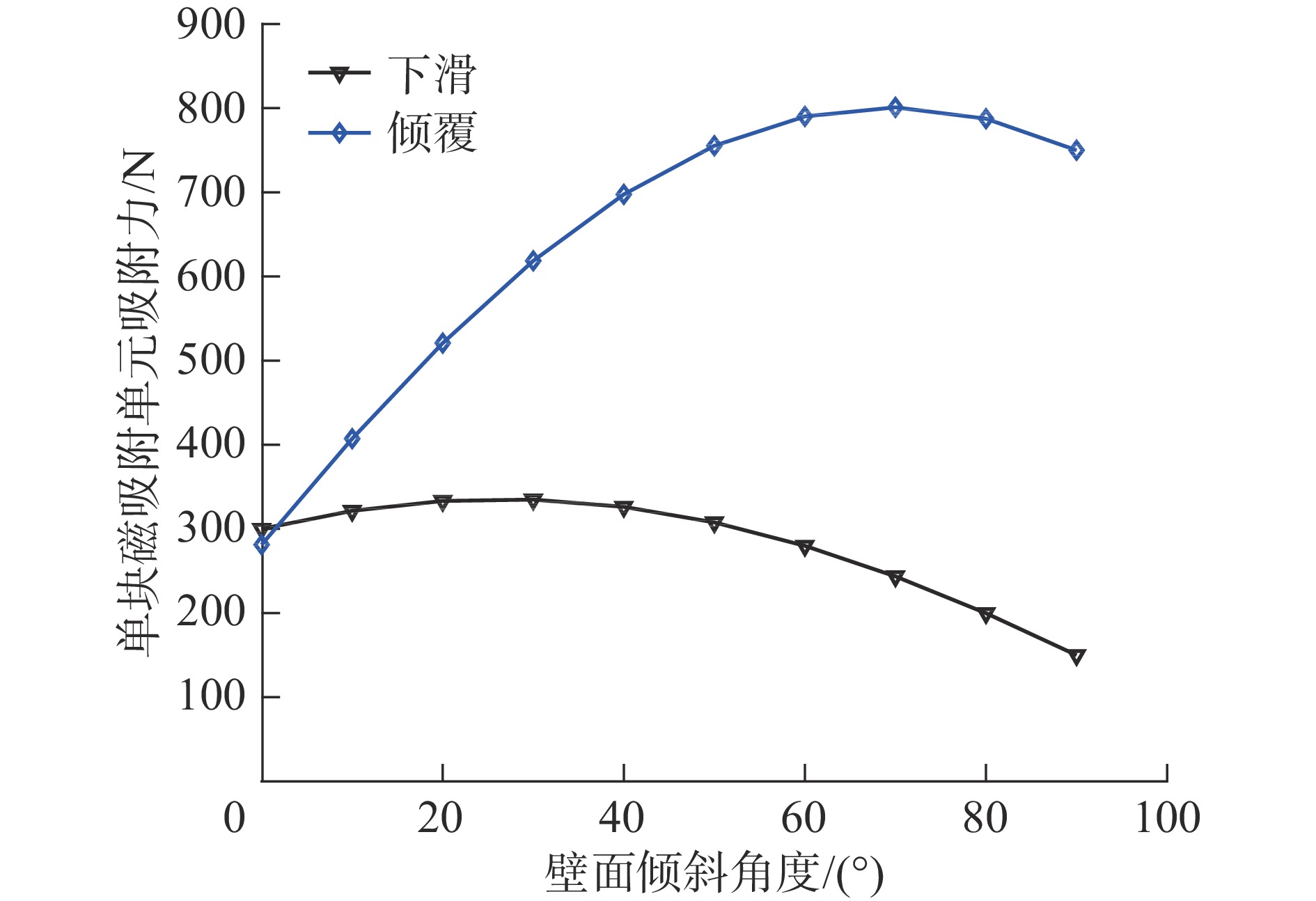
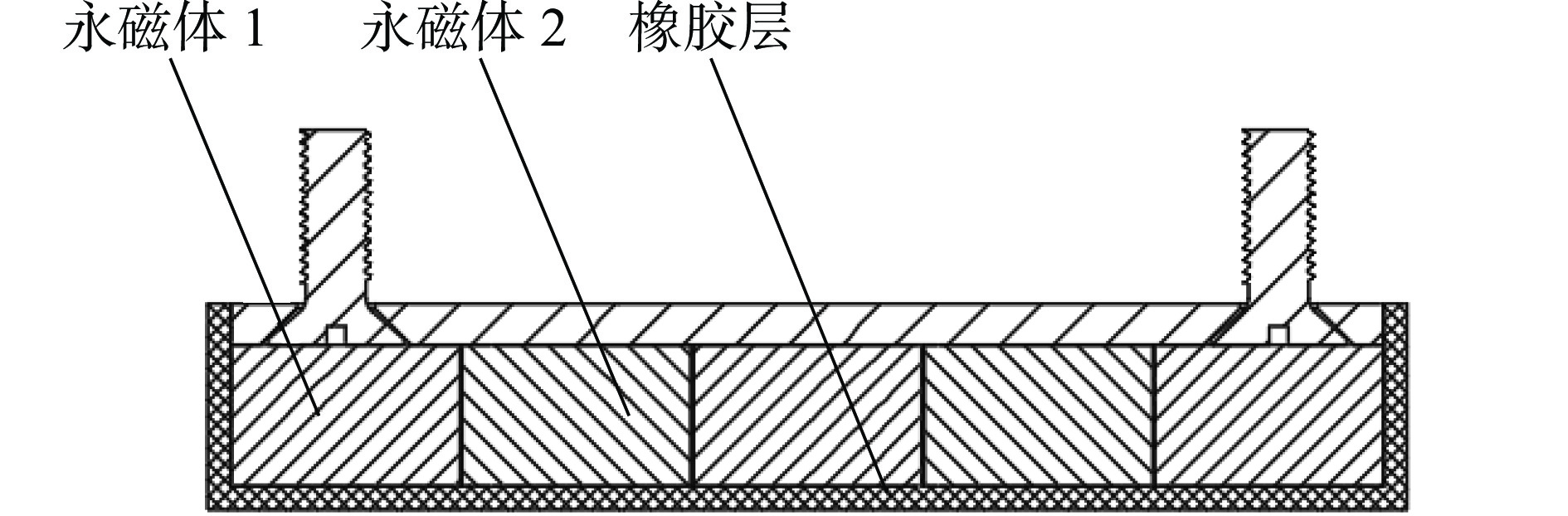
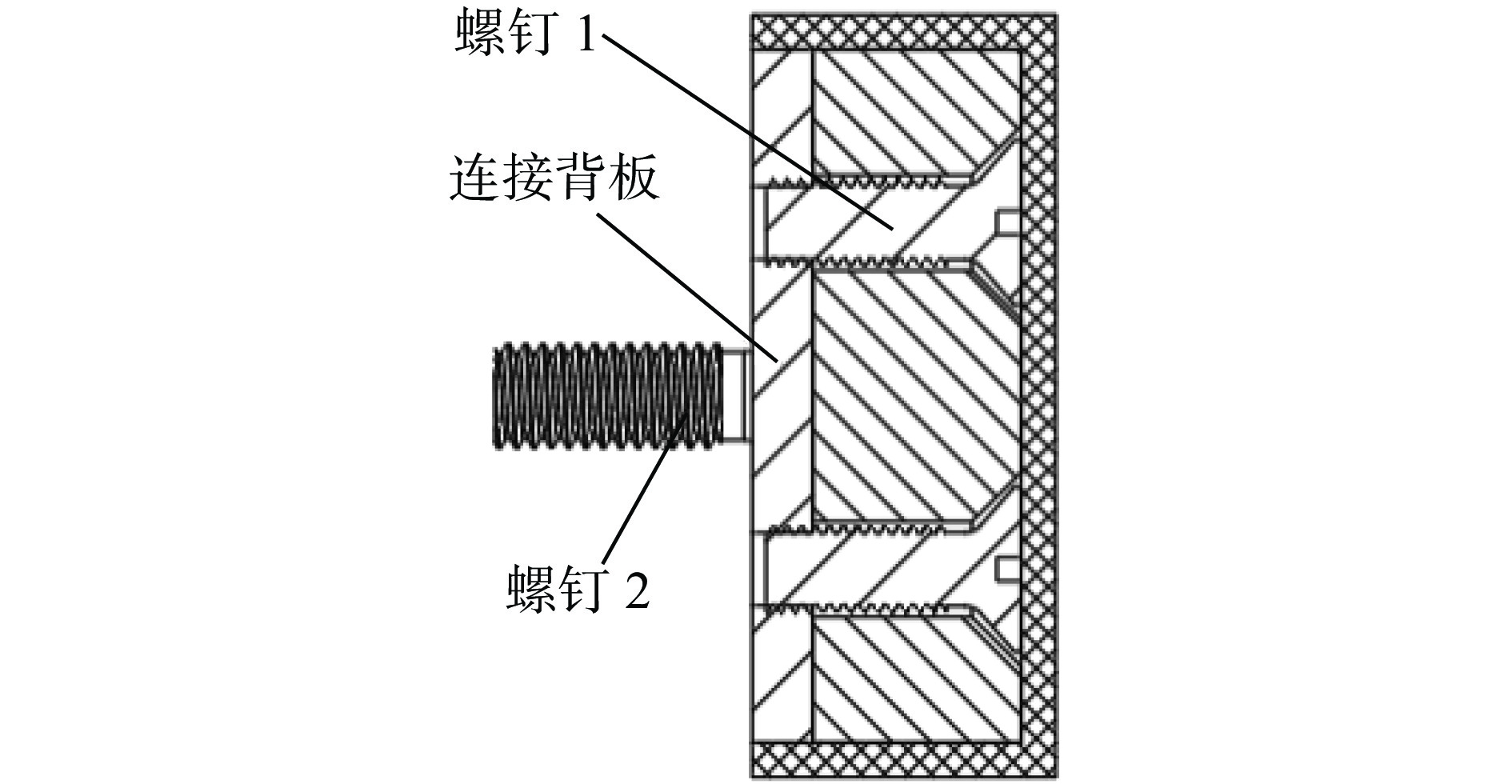
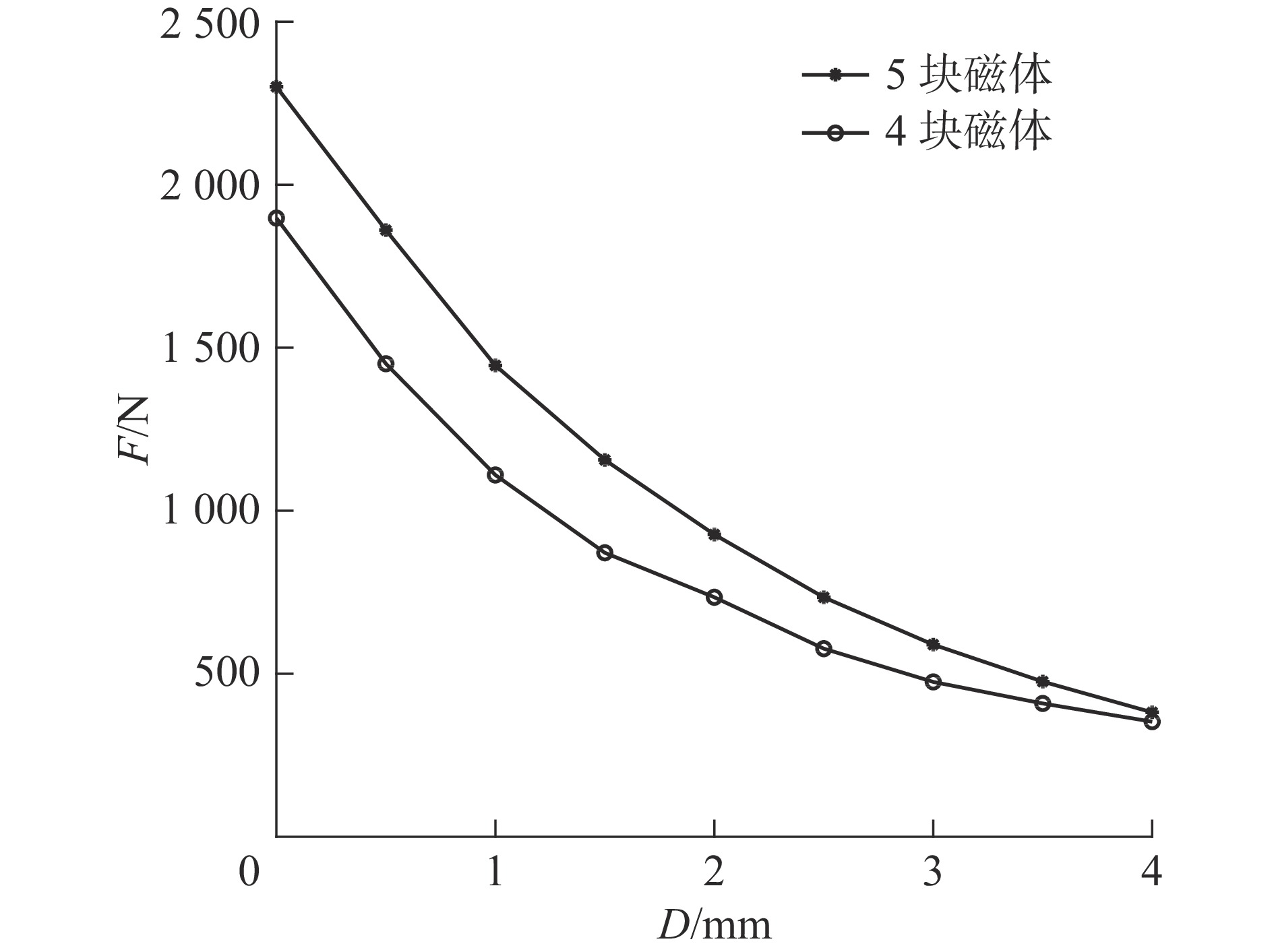
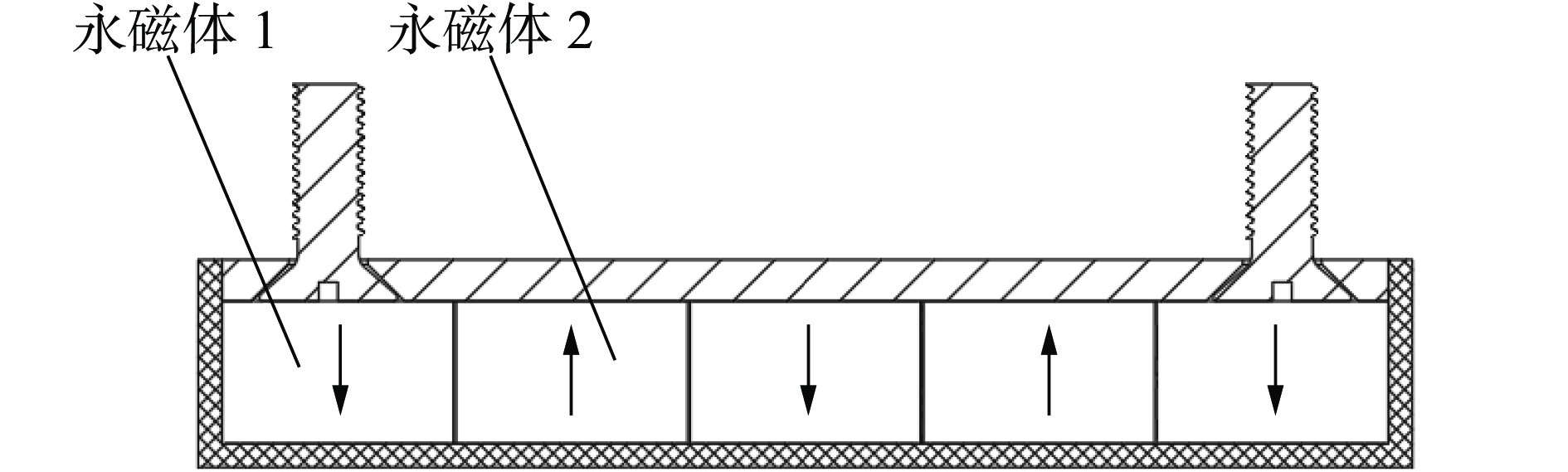
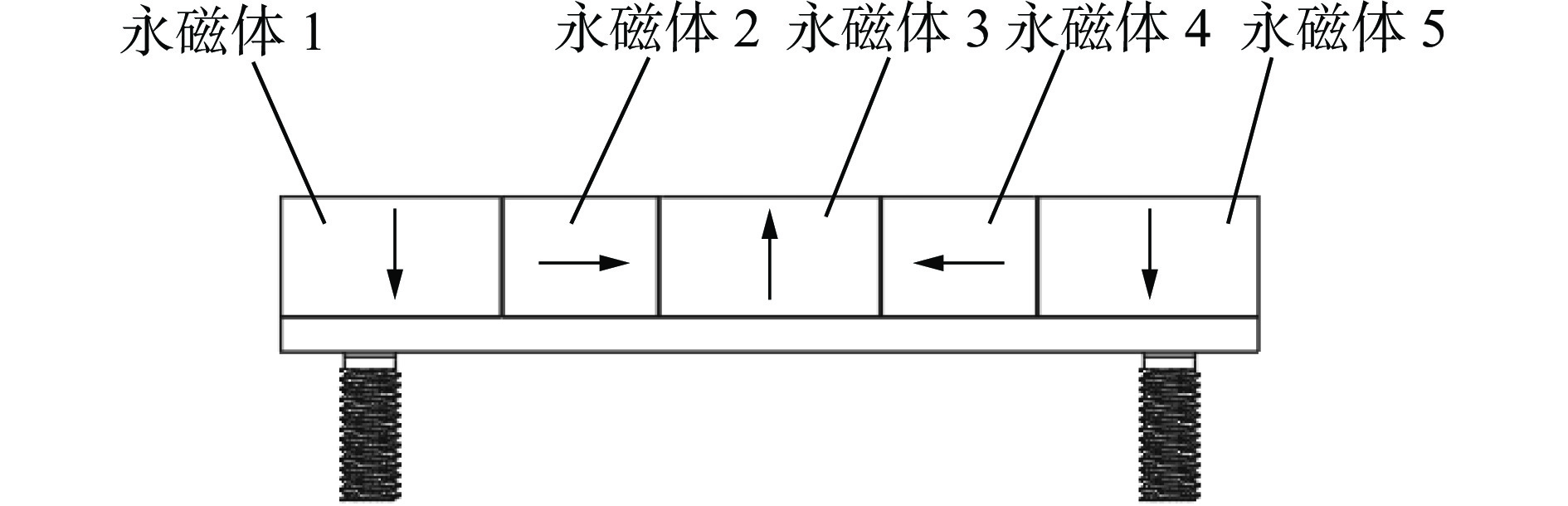
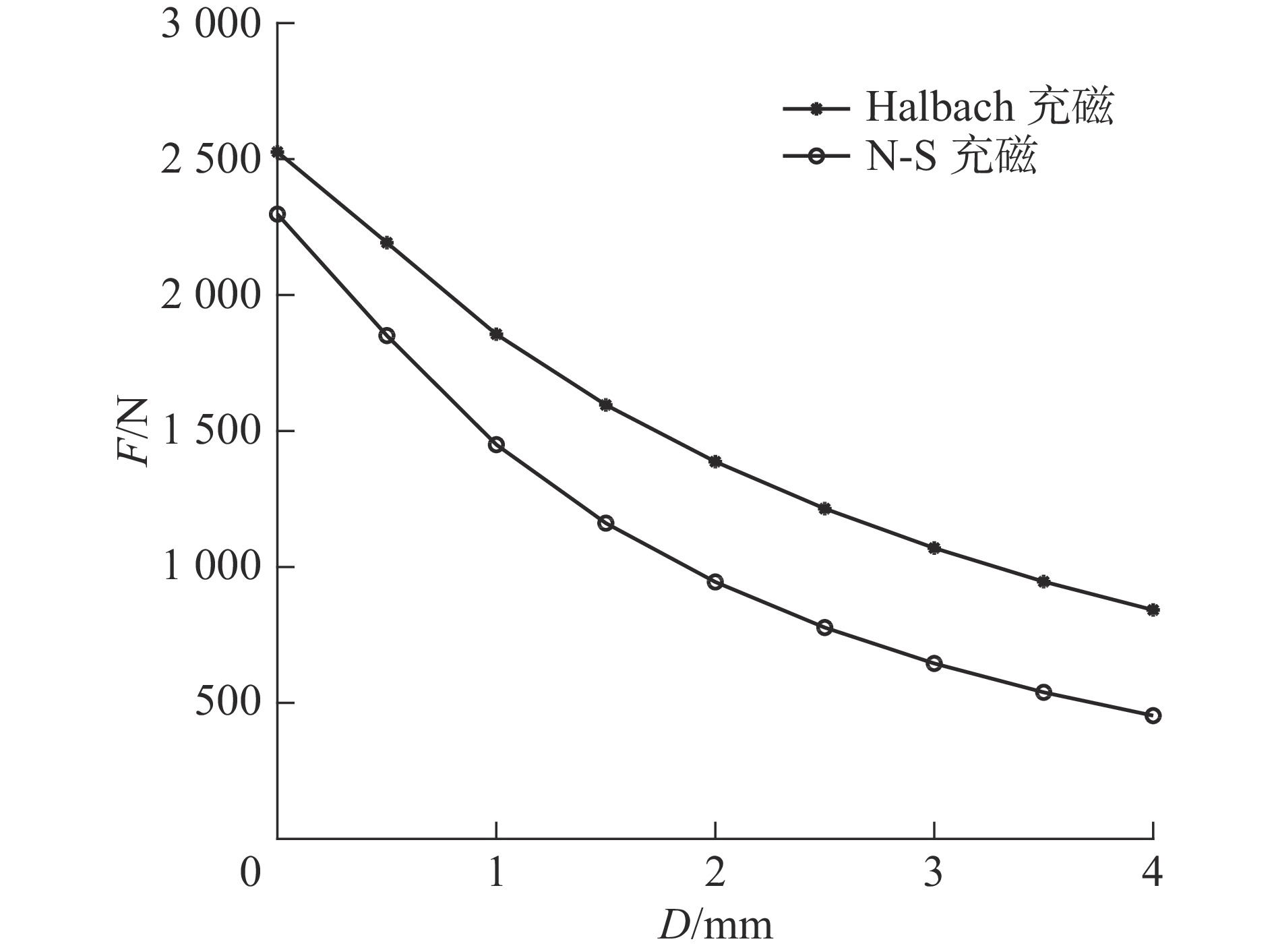
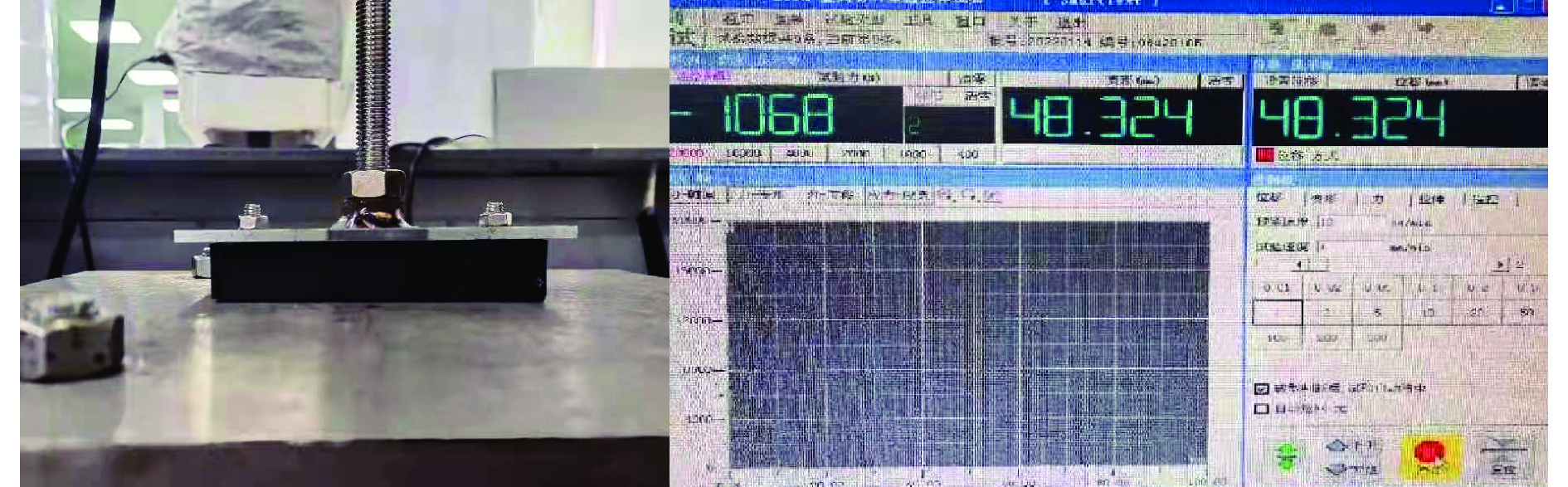
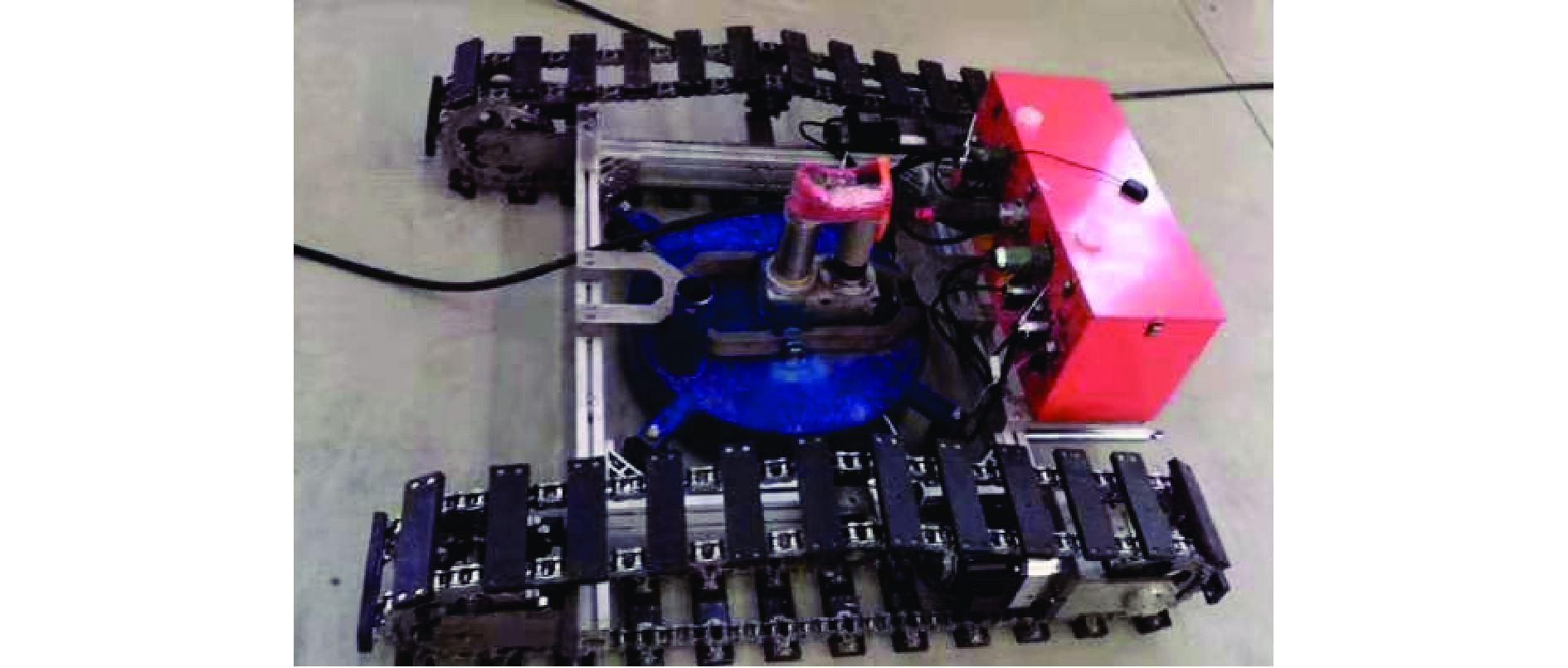
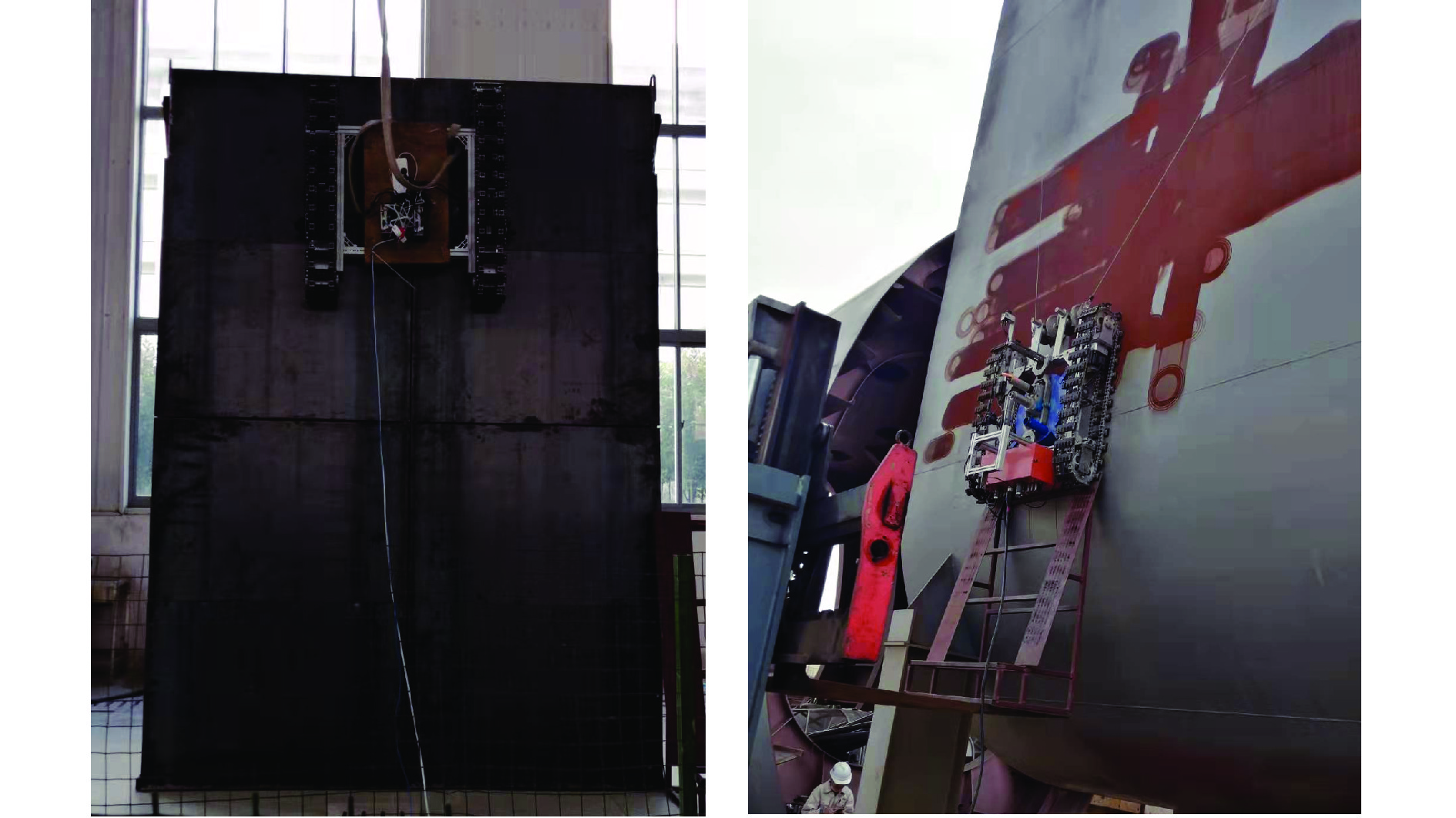
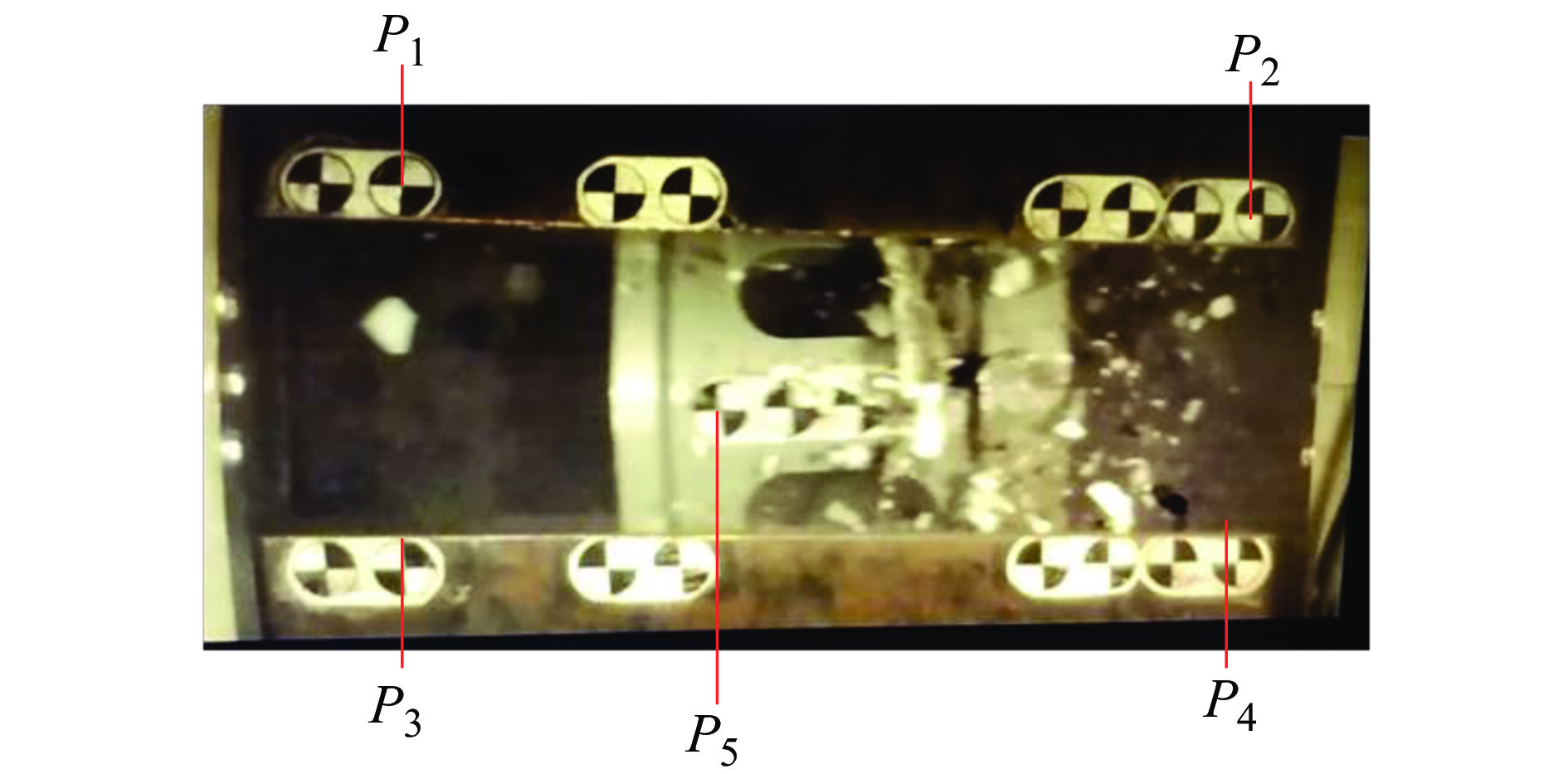
针对搭载高压水射流装置的履带式爬壁机器人附壁稳定性问题,结合设计的爬壁机器人的结构特点,建立了爬壁机器人吸附在船舶壁面时的运动学模型,分析并求解了影响爬壁机器人附壁性能的各个因素,并对其磁吸附单元进行设计,分析磁吸附单元在N-S充磁和Halbach充磁方向时磁力与间隙关系。借助拉伸试验机对永磁吸附单元进行试验,验证了磁吸附单元的可靠性。并对搭建的功能性样机,开展室内水平行走、垂直爬壁和1∶1实船模型爬壁试验,验证了分析结果的正确性,为履带式爬壁机器人进一步结构优化设计和动力学分析提供了基础。
针对搭载高压水射流装置的履带式爬壁机器人附壁稳定性问题,结合设计的爬壁机器人的结构特点,建立了爬壁机器人吸附在船舶壁面时的运动学模型,分析并求解了影响爬壁机器人附壁性能的各个因素,并对其磁吸附单元进行设计,分析磁吸附单元在N-S充磁和Halbach充磁方向时磁力与间隙关系。借助拉伸试验机对永磁吸附单元进行试验,验证了磁吸附单元的可靠性。并对搭建的功能性样机,开展室内水平行走、垂直爬壁和1∶1实船模型爬壁试验,验证了分析结果的正确性,为履带式爬壁机器人进一步结构优化设计和动力学分析提供了基础。

2024, 43(5): 844-850.
doi: 10.13433/j.cnki.1003-8728.20220262
摘要:
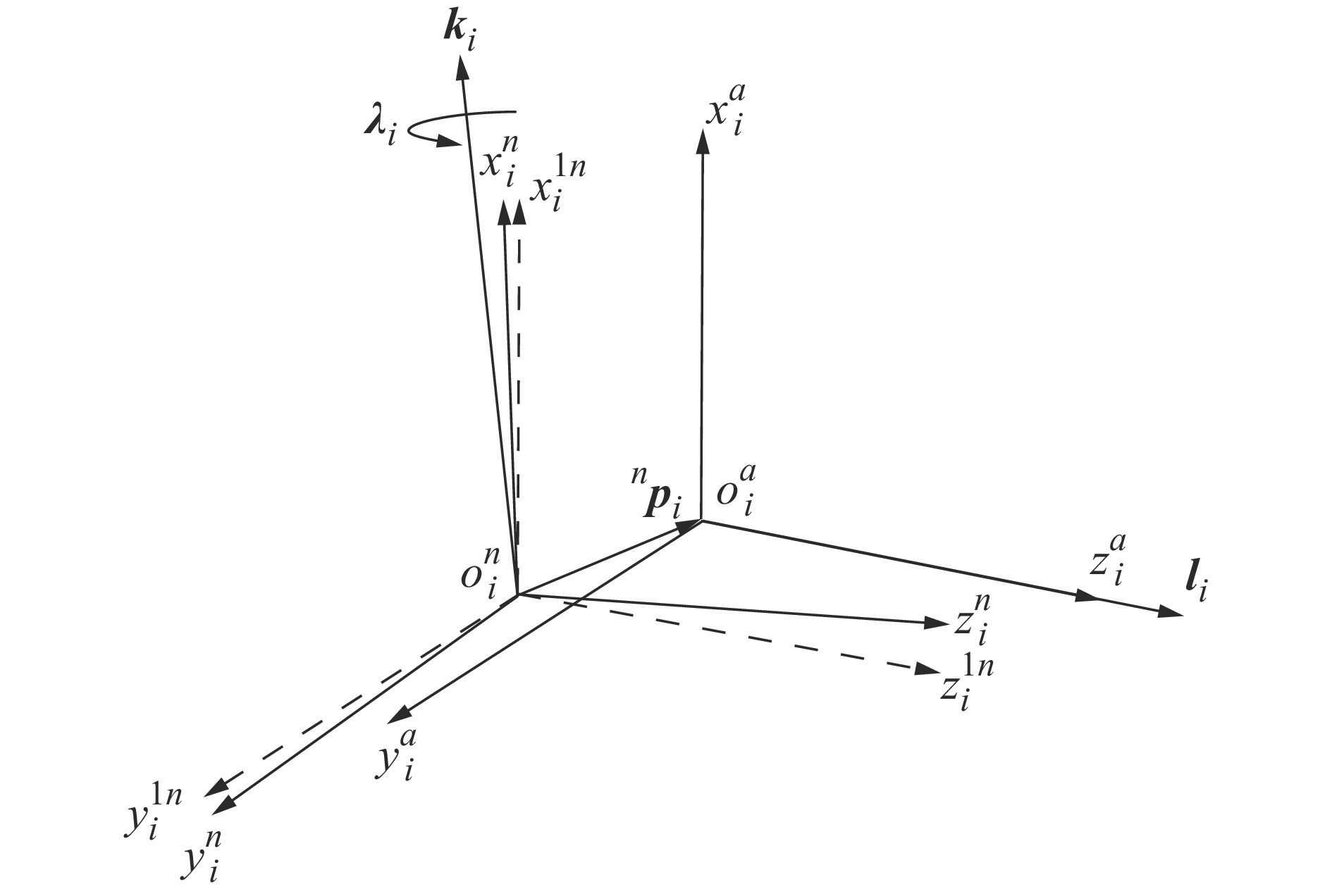
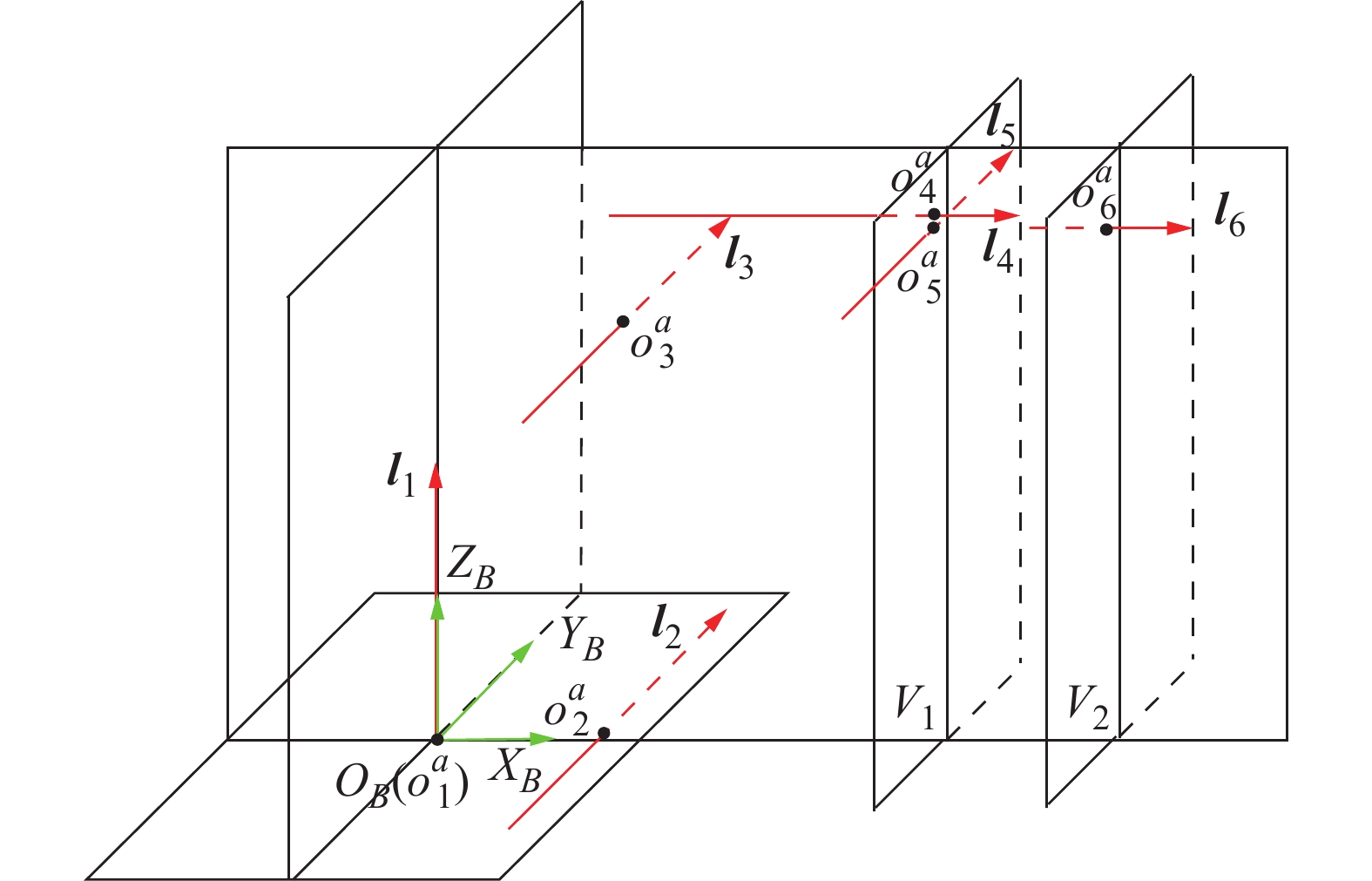
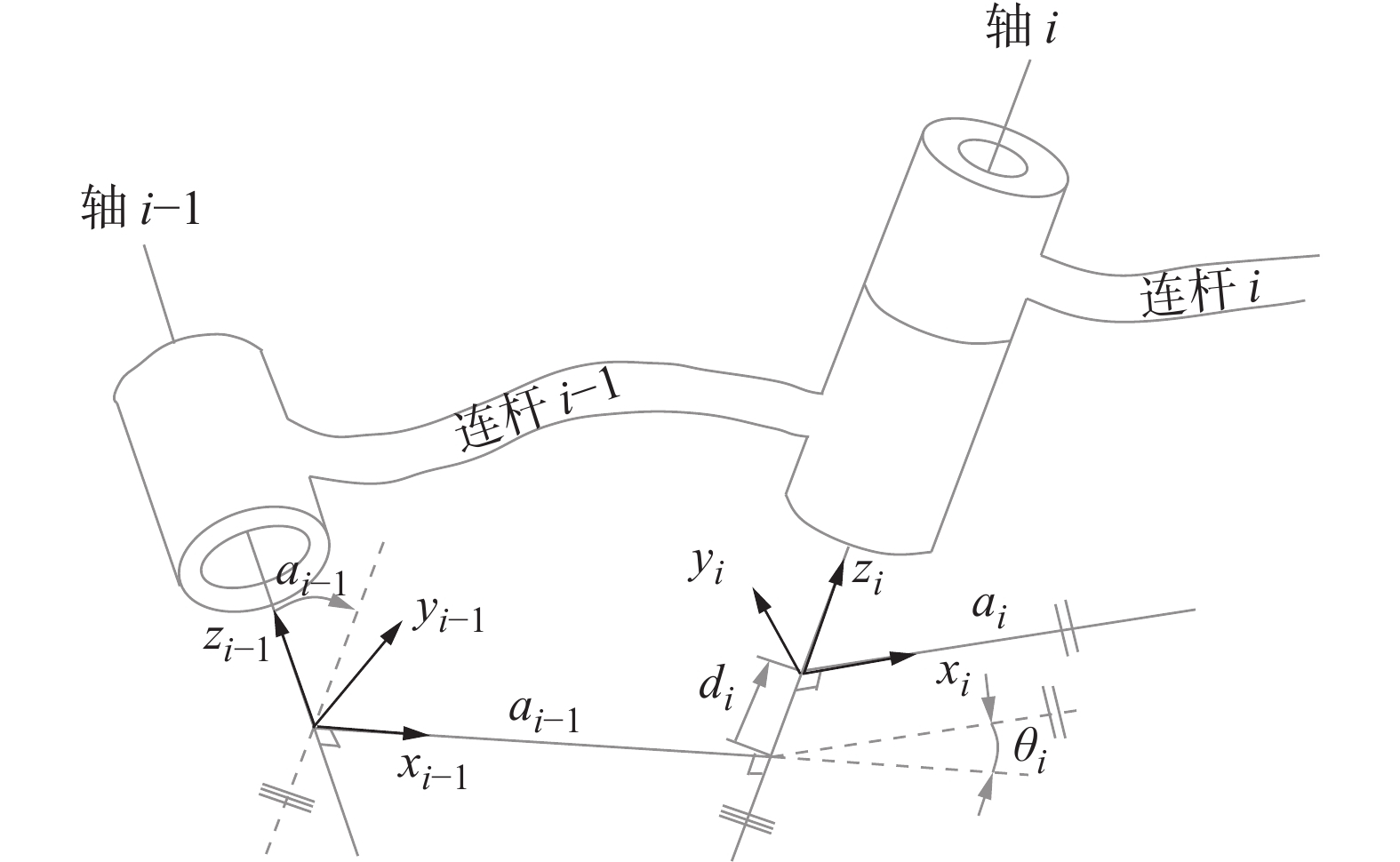
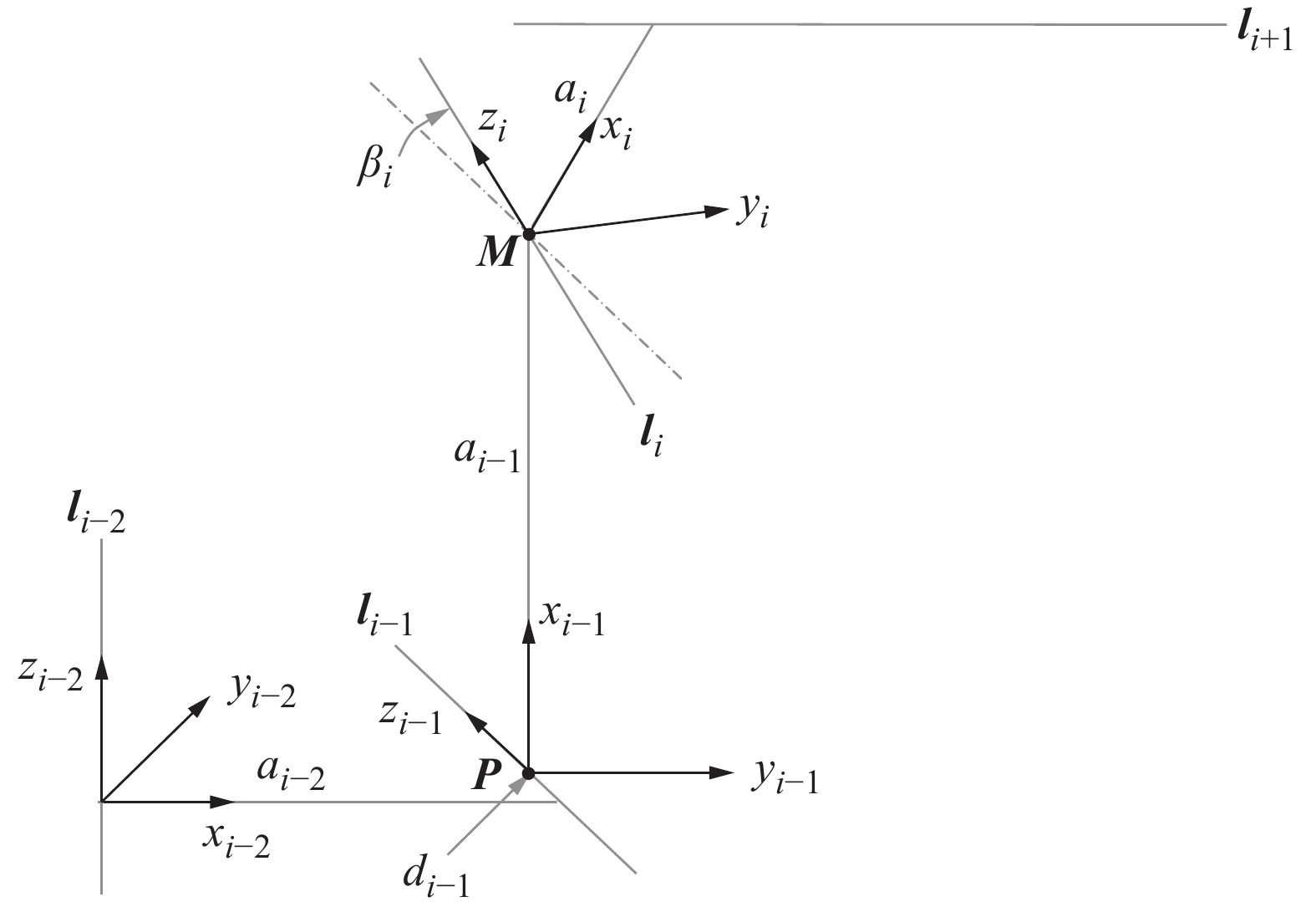
轴旋转法标定是通过依次旋转机器人关节轴获取测量点,利用测量点拟合机器人轴线方程。基于轴线方程,利用两种方法建立机器人运动学方程,第一种方法首先求取机器人各轴理论坐标系相对于基坐标系的变换矩阵,然后基于理论轴线与实际轴线间的微小误差,求取各轴实际坐标系相对于基坐标系的变换矩阵,最后求取六变量相邻变换矩阵。第二种方法是直接利用新MDH法求取实际机器人的相邻变换矩阵,即对于空间交叉轴,求其公垂线确定轴坐标系,对于平行轴,通过交叉轴的公垂线交点向另一轴作垂线,确定另一轴坐标系的x轴方向。比较两种方法发现,第一种方法无法求解各轴的零位偏差,而第二种方法可以解耦求取各轴零位偏差与几何参数。利用牛顿迭代法求解两种模型的逆运动学方程,并用实验和仿真计算比较两种方法的标定效果,其轨迹精度达到−0.83 ~ + 0.52 mm。
轴旋转法标定是通过依次旋转机器人关节轴获取测量点,利用测量点拟合机器人轴线方程。基于轴线方程,利用两种方法建立机器人运动学方程,第一种方法首先求取机器人各轴理论坐标系相对于基坐标系的变换矩阵,然后基于理论轴线与实际轴线间的微小误差,求取各轴实际坐标系相对于基坐标系的变换矩阵,最后求取六变量相邻变换矩阵。第二种方法是直接利用新MDH法求取实际机器人的相邻变换矩阵,即对于空间交叉轴,求其公垂线确定轴坐标系,对于平行轴,通过交叉轴的公垂线交点向另一轴作垂线,确定另一轴坐标系的x轴方向。比较两种方法发现,第一种方法无法求解各轴的零位偏差,而第二种方法可以解耦求取各轴零位偏差与几何参数。利用牛顿迭代法求解两种模型的逆运动学方程,并用实验和仿真计算比较两种方法的标定效果,其轨迹精度达到−0.83 ~ + 0.52 mm。

2024, 43(5): 851-857.
doi: 10.13433/j.cnki.1003-8728.20220255
摘要:
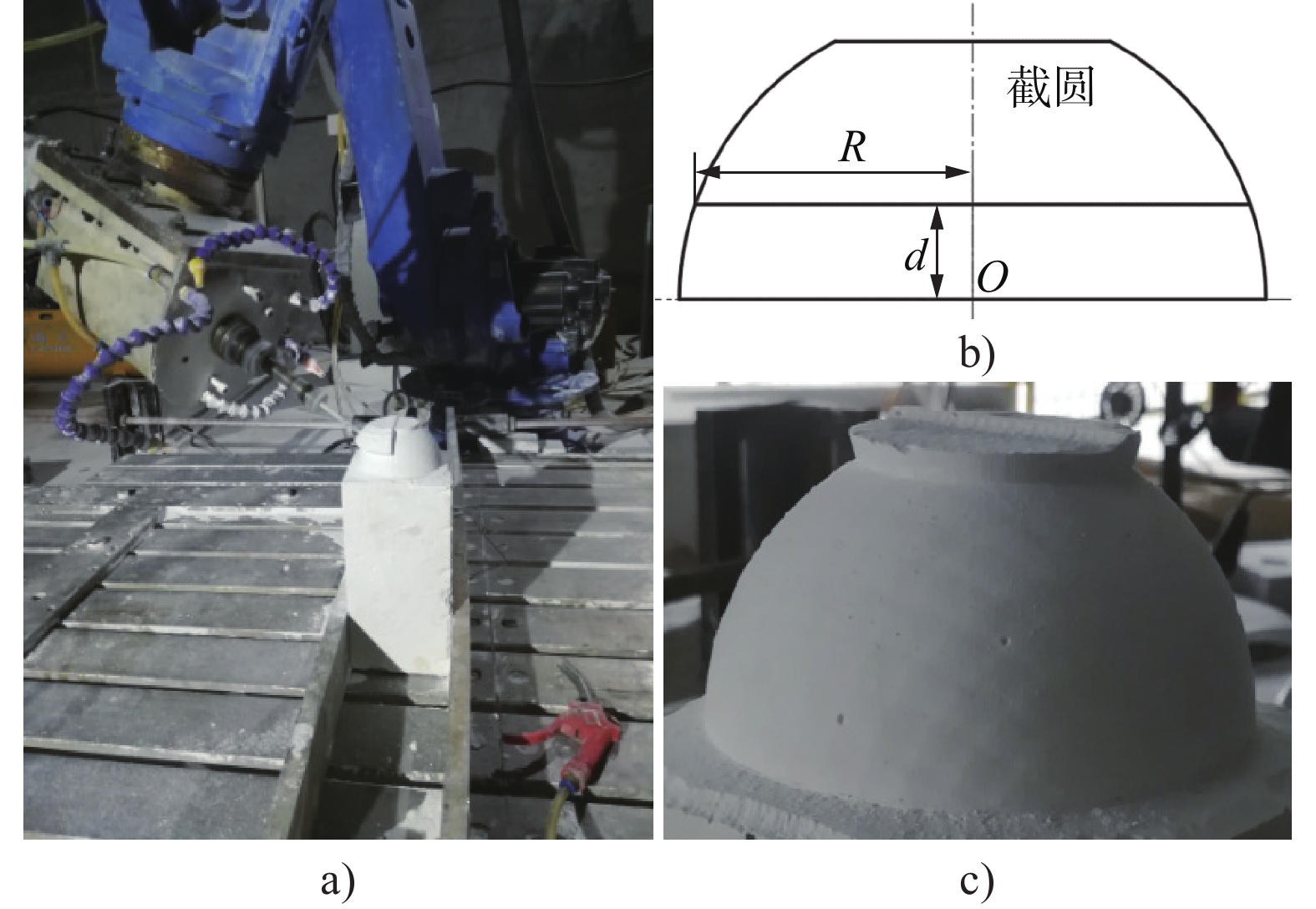
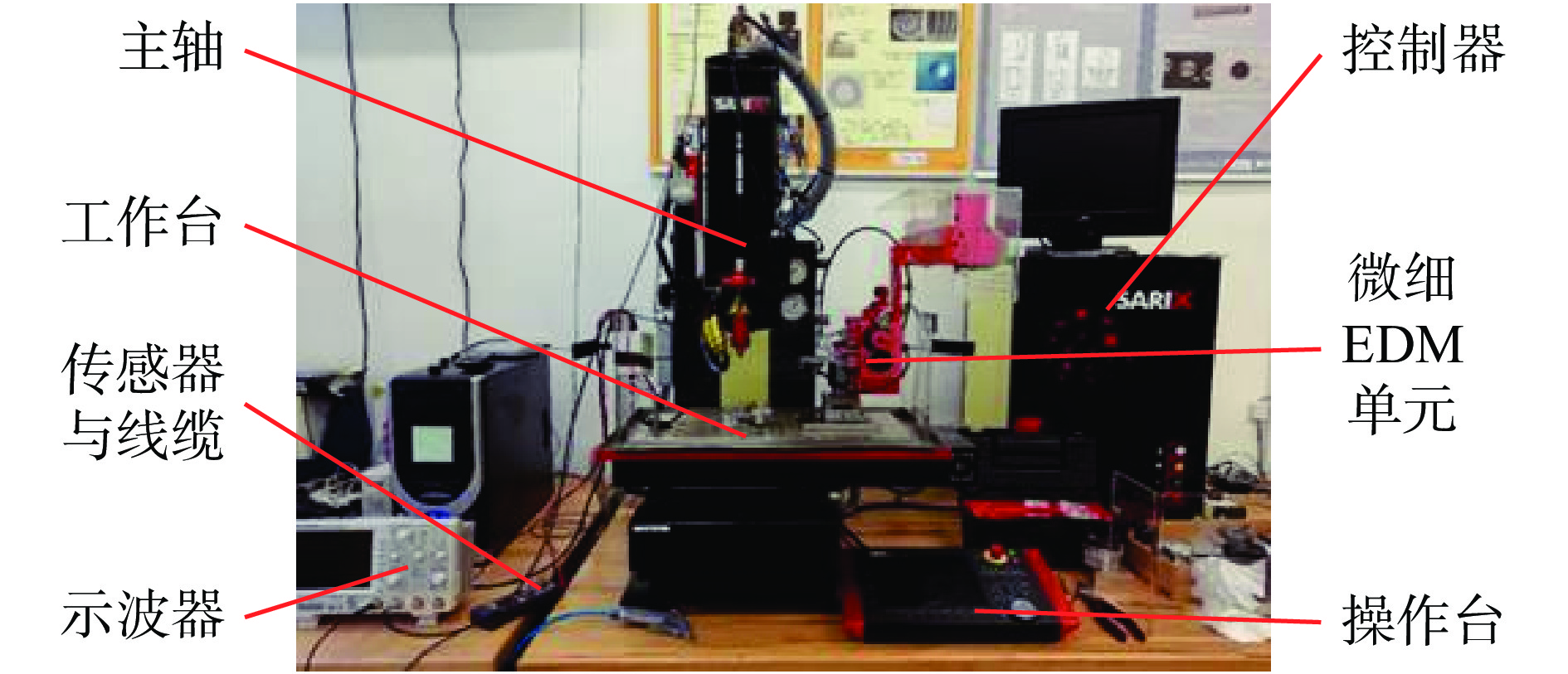
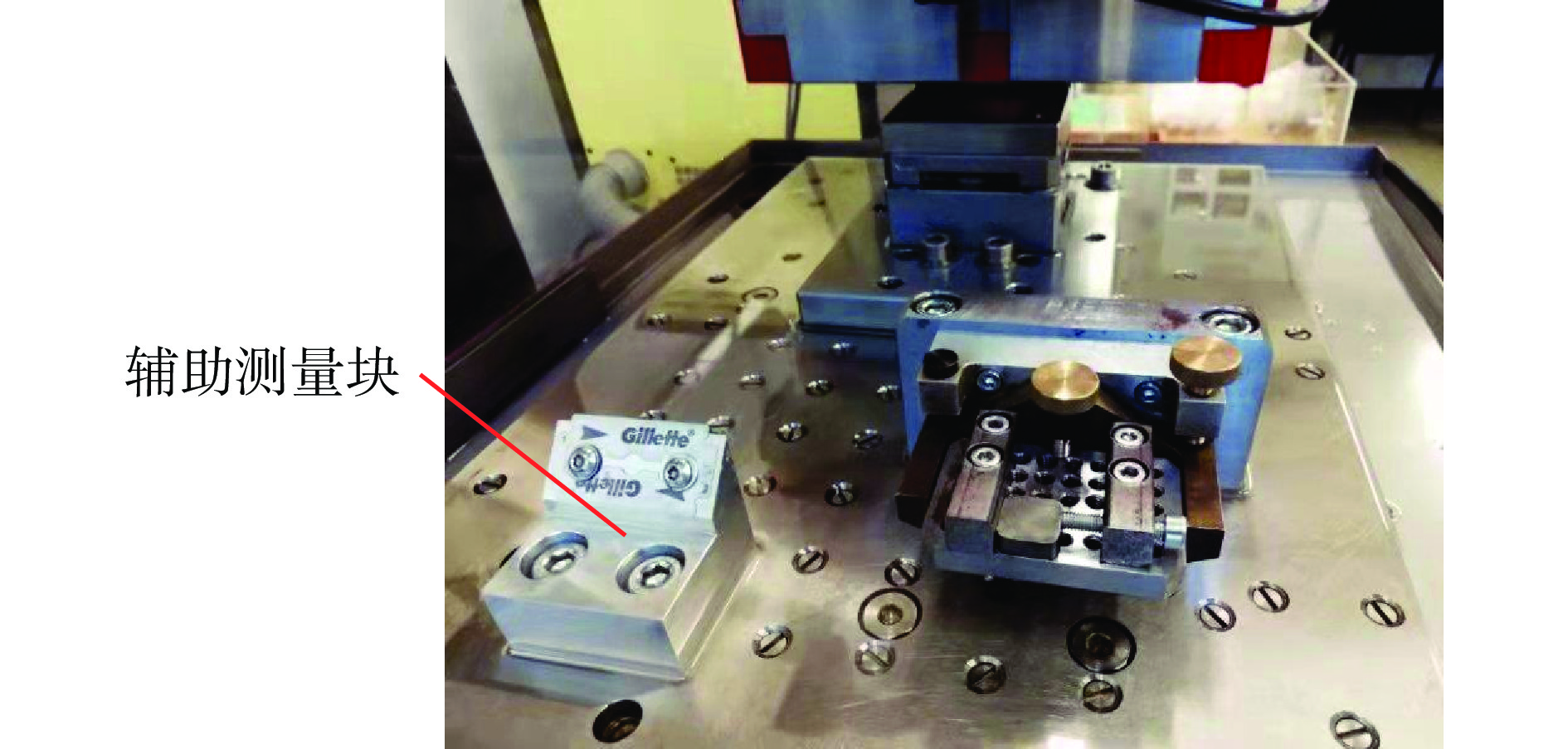
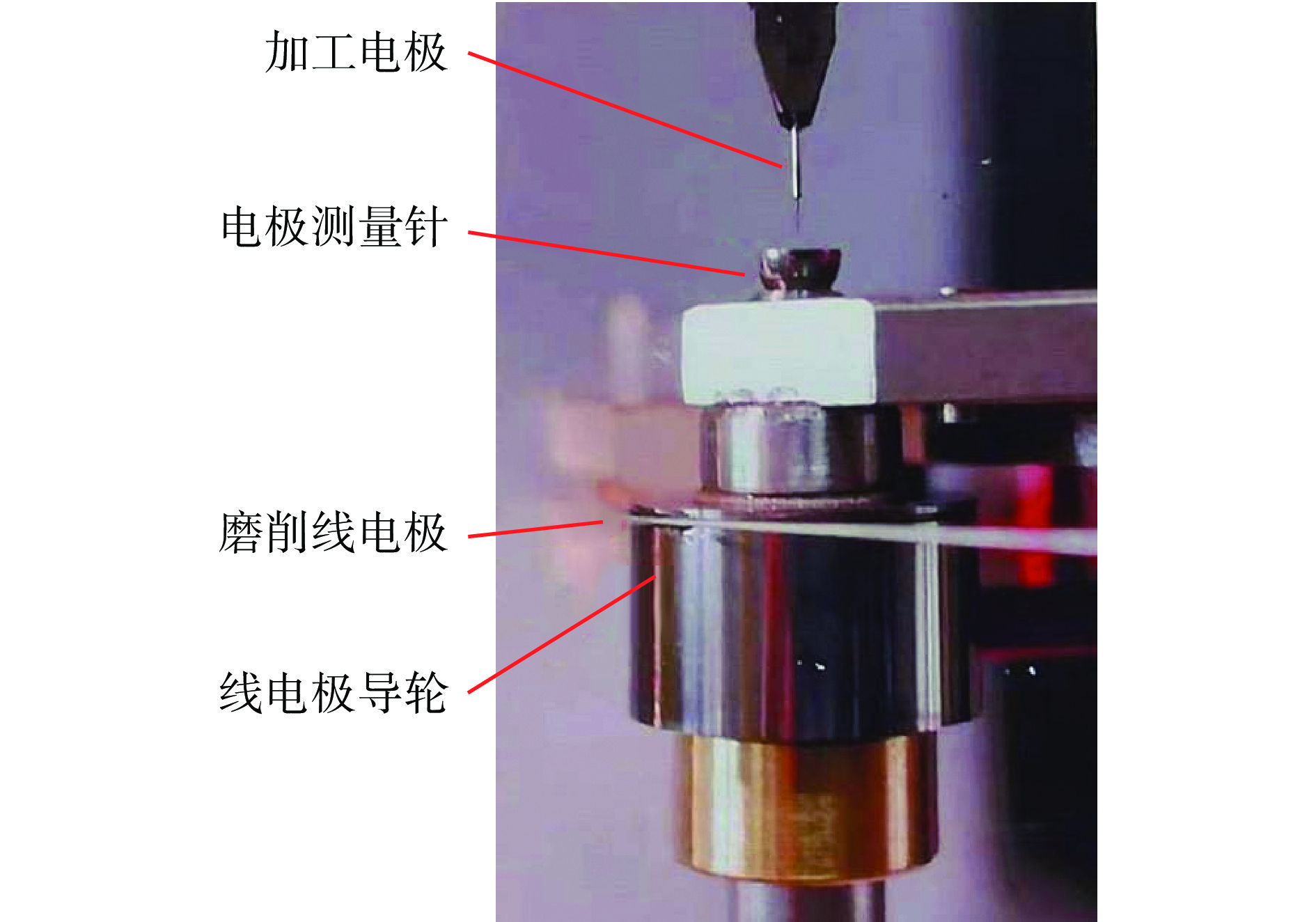
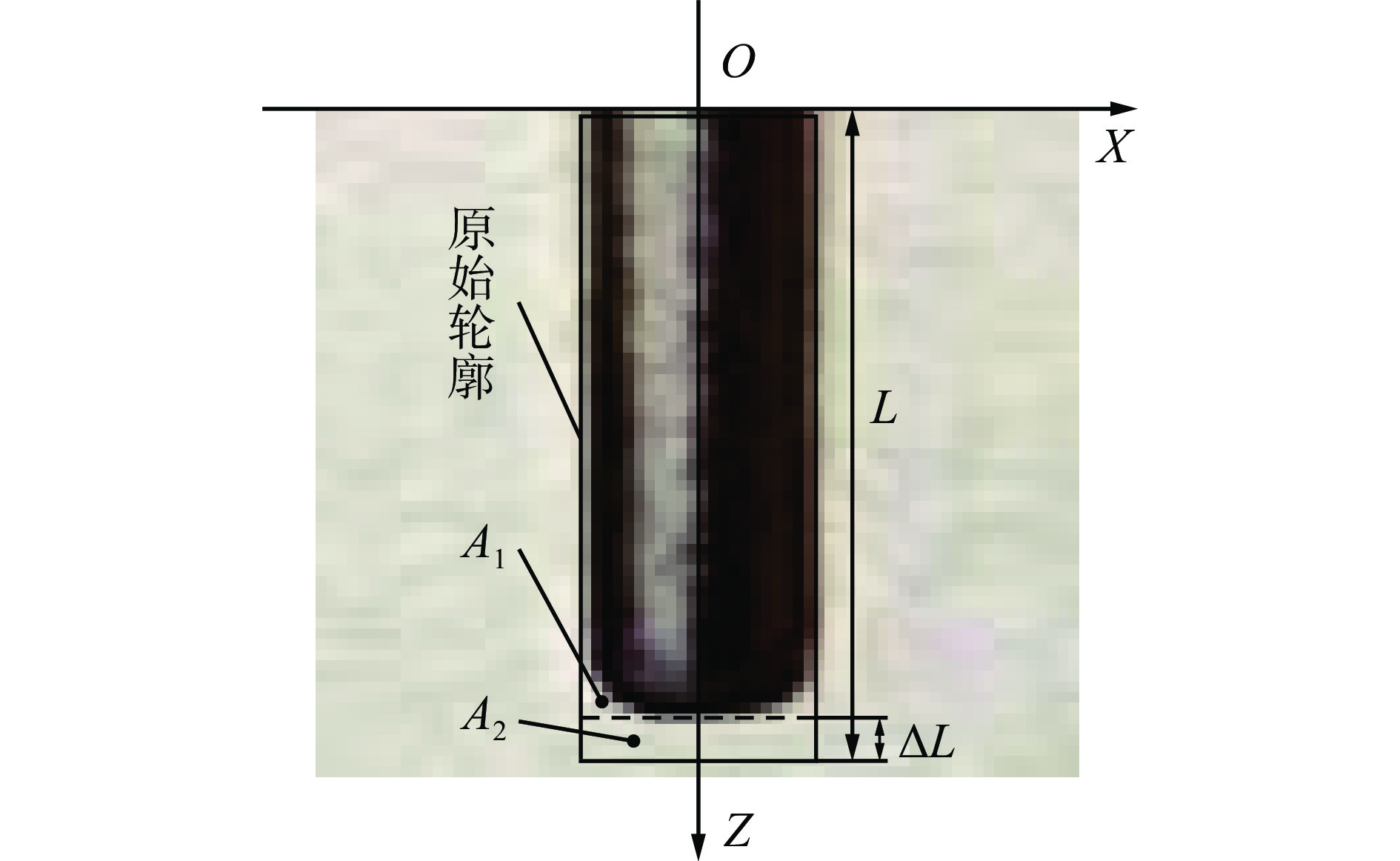
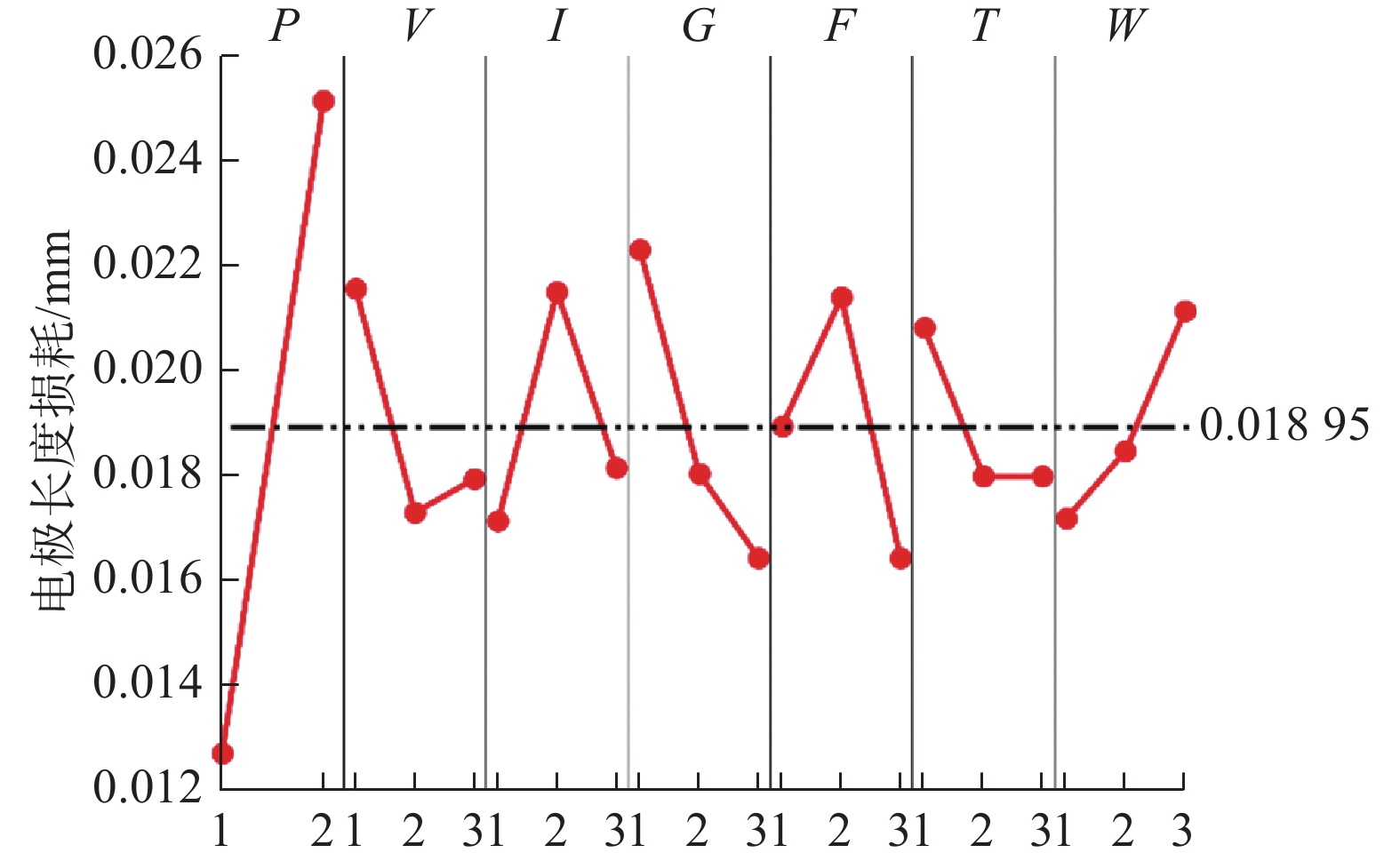
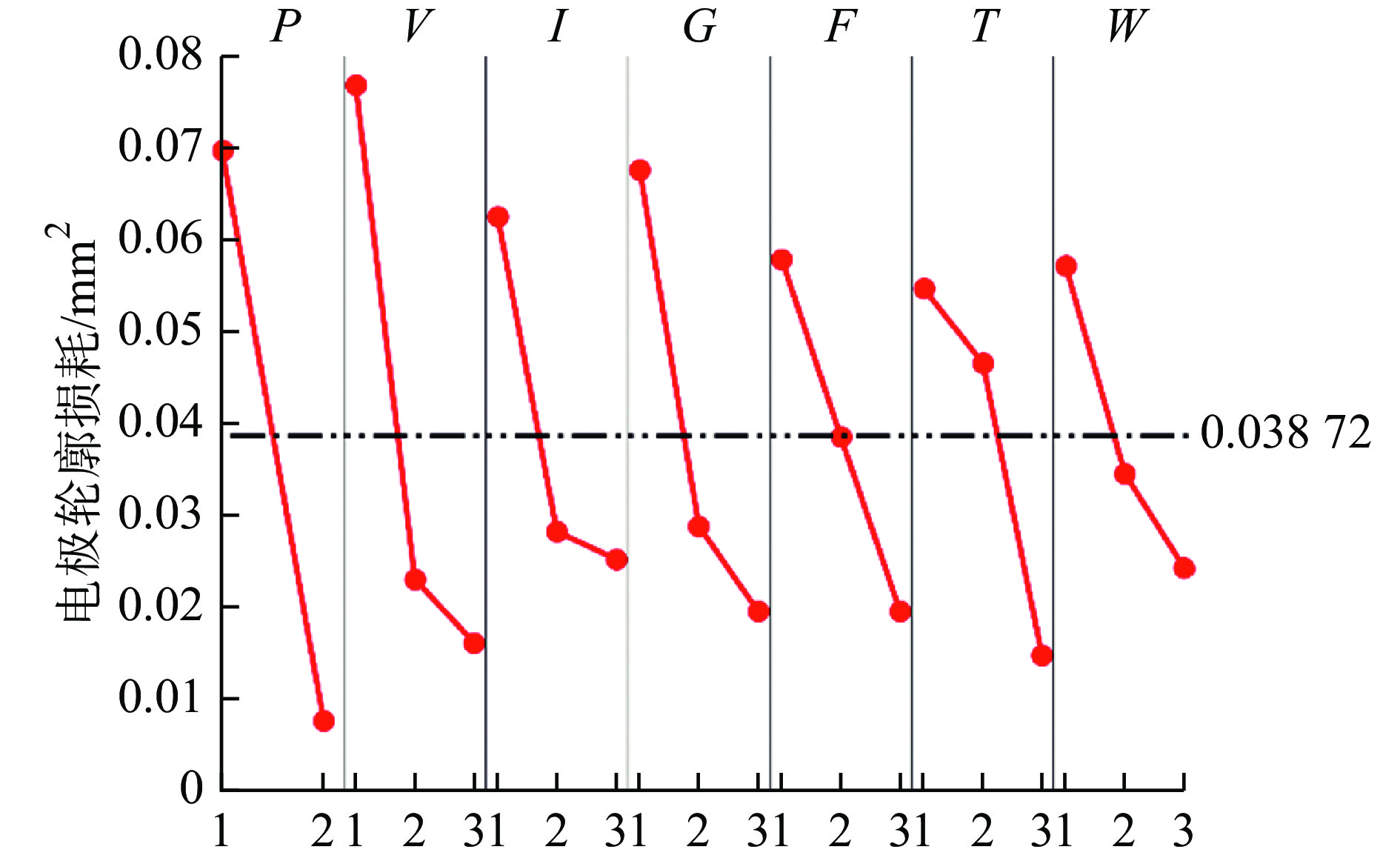
为研究电火花加工Al2O3-TiC陶瓷材料工艺参数对工艺性能的影响,设计了混合2-3水平正交试验方法。研究加工极性、极间电压、最大放电电流、增益、脉冲频率、脉宽、放电间隙与电极长度损耗、电极轮廓损耗、材料去除率之间的规律。通过极差分析,获得了工艺参数对工艺性能的影响趋势。结合方差分析,表明加工极性对电极损耗有显著影响,极间电压、最大放电电流显著影响材料去除率。综合三项工艺性能,最优的参数组合为负加工极性、130 V极间电压、50 A最大放电电流、45增益、150 Hz脉冲频率、1.0 μs脉宽、放电间隙40 μm。
为研究电火花加工Al2O3-TiC陶瓷材料工艺参数对工艺性能的影响,设计了混合2-3水平正交试验方法。研究加工极性、极间电压、最大放电电流、增益、脉冲频率、脉宽、放电间隙与电极长度损耗、电极轮廓损耗、材料去除率之间的规律。通过极差分析,获得了工艺参数对工艺性能的影响趋势。结合方差分析,表明加工极性对电极损耗有显著影响,极间电压、最大放电电流显著影响材料去除率。综合三项工艺性能,最优的参数组合为负加工极性、130 V极间电压、50 A最大放电电流、45增益、150 Hz脉冲频率、1.0 μs脉宽、放电间隙40 μm。

2024, 43(5): 858-864.
doi: 10.13433/j.cnki.1003-8728.20220265
摘要:
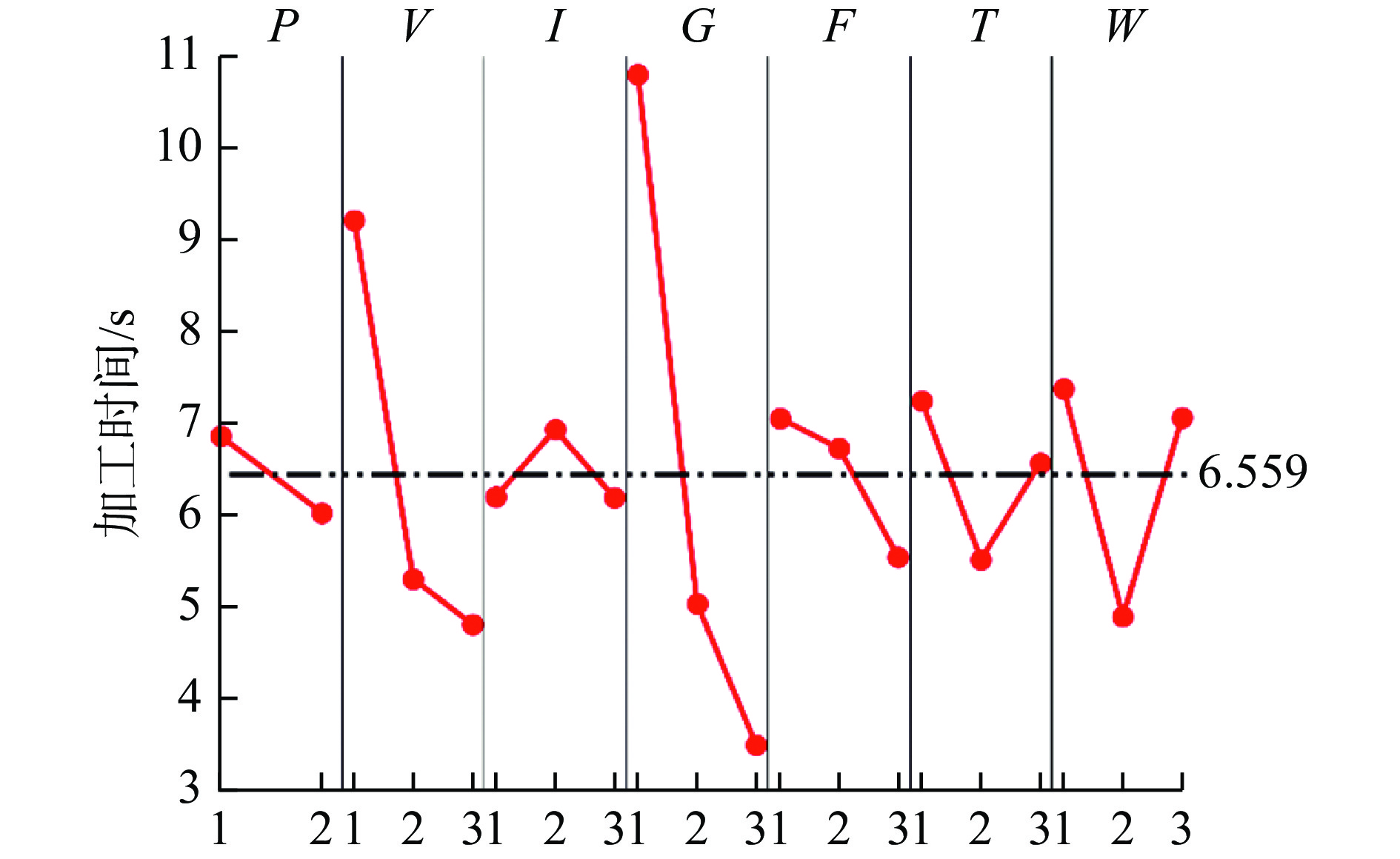
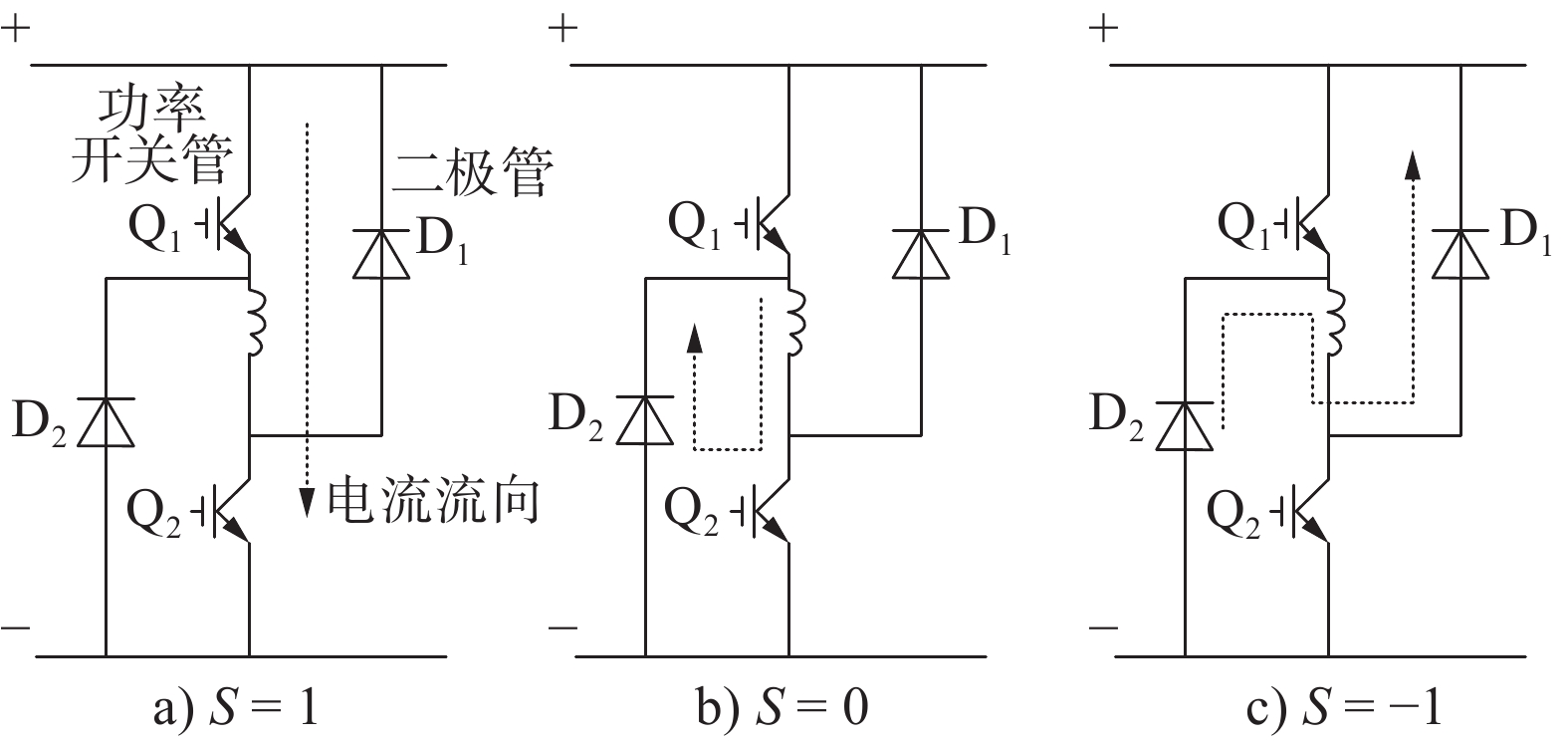
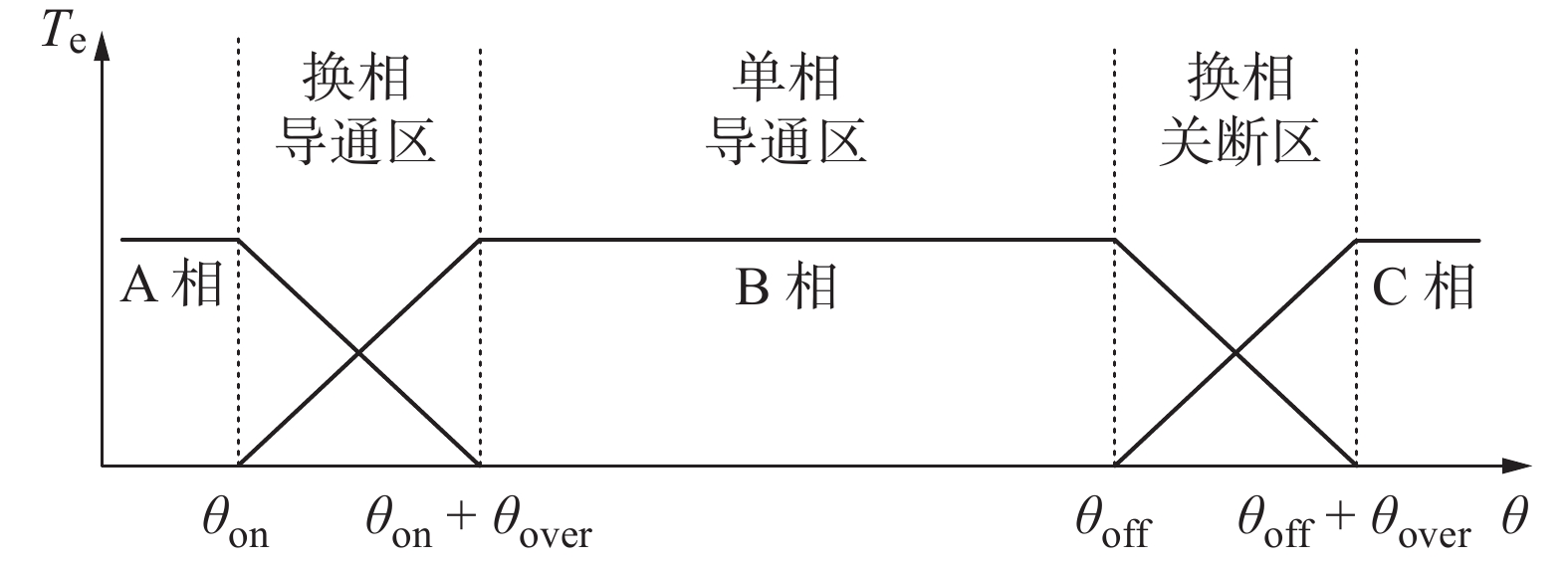
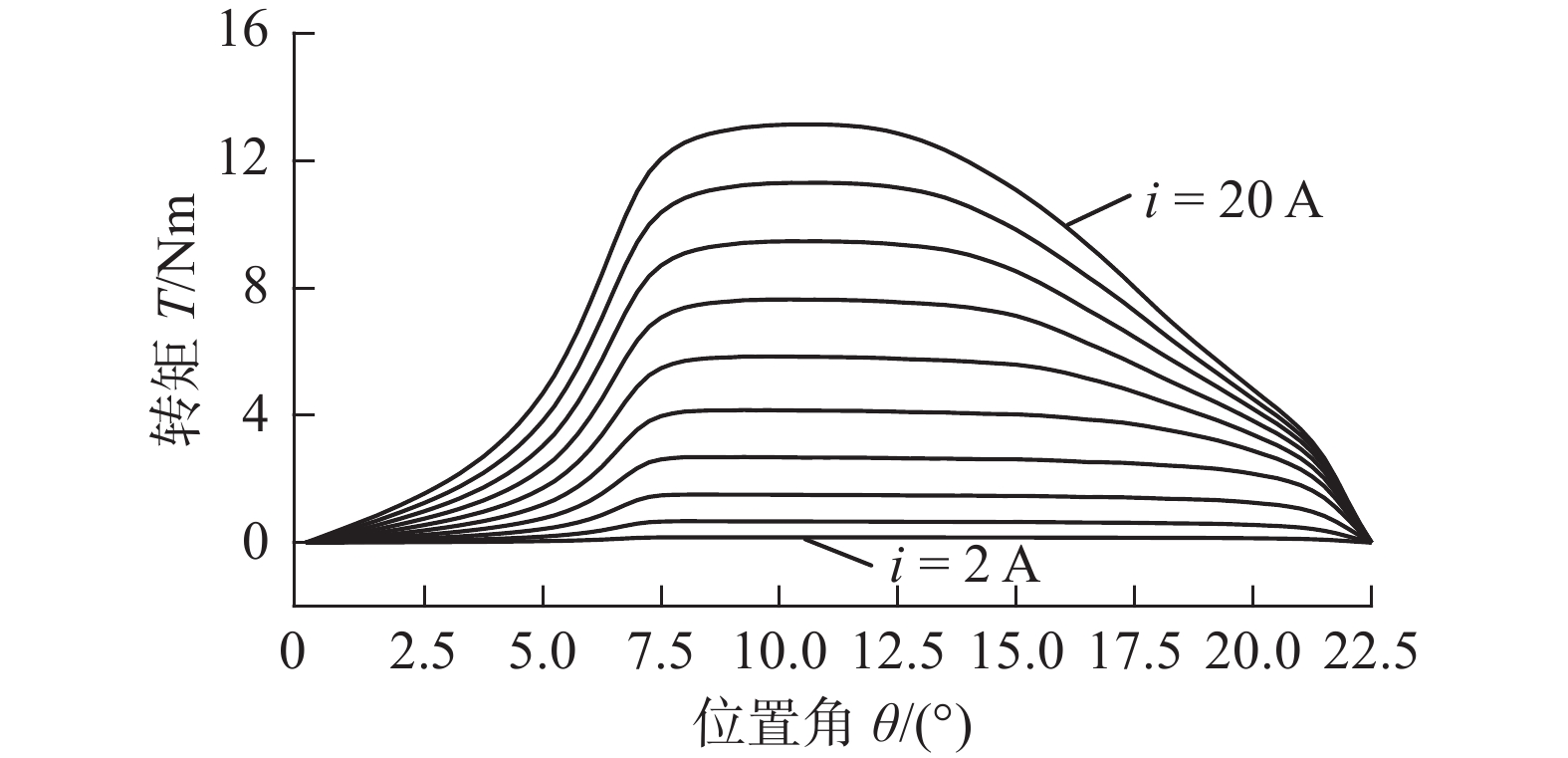
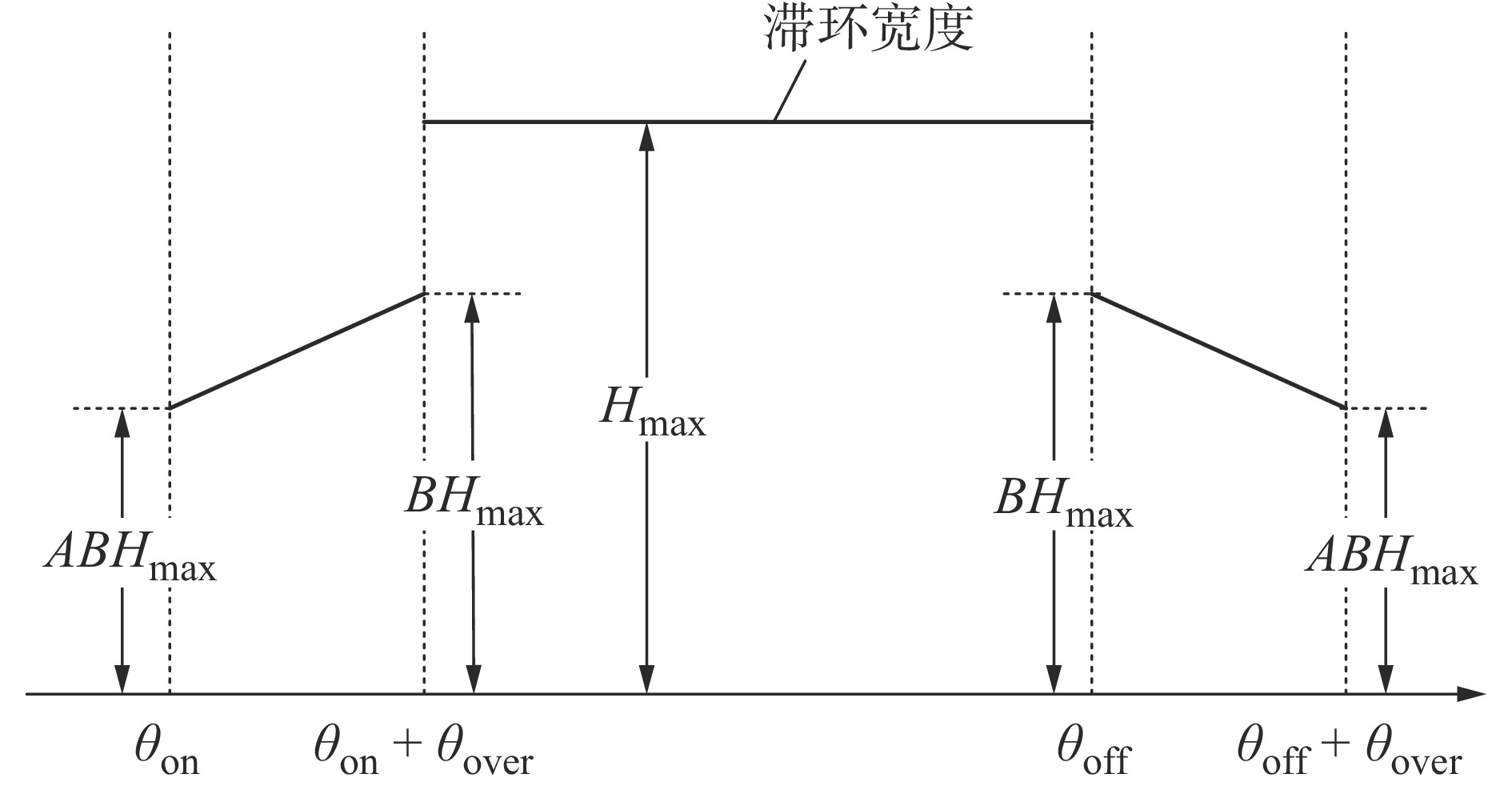
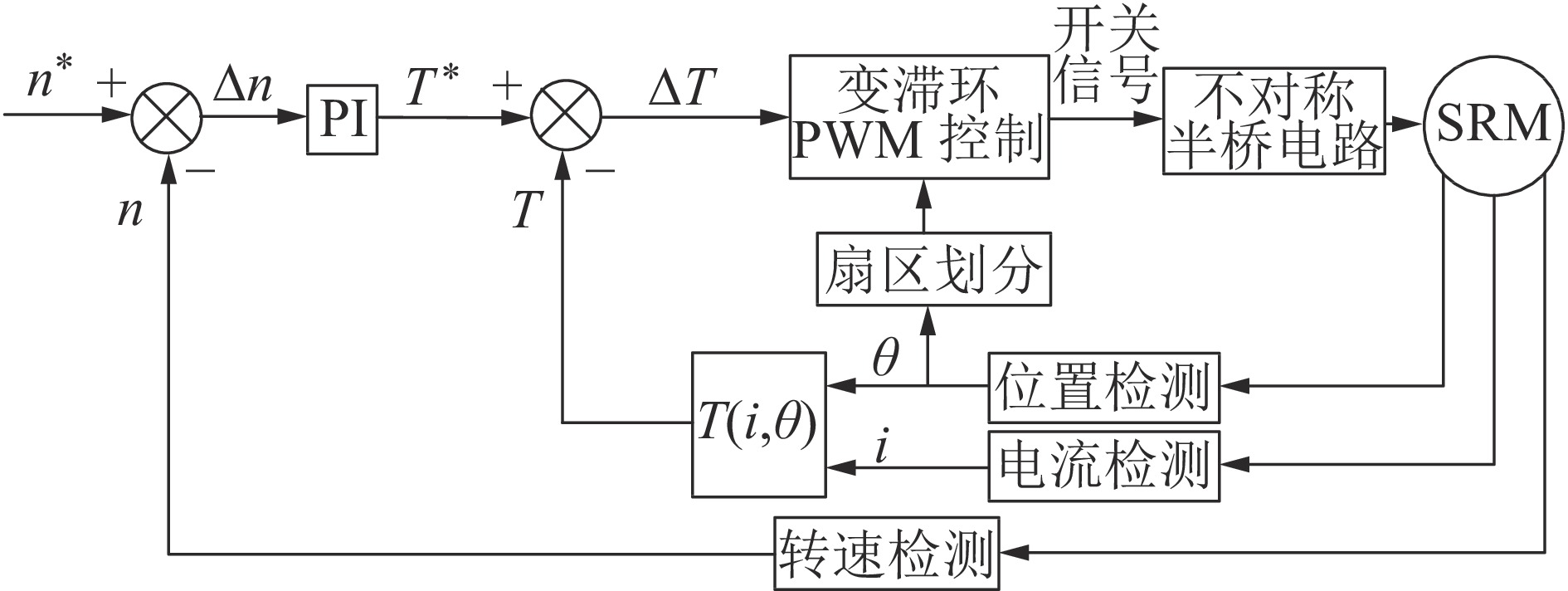
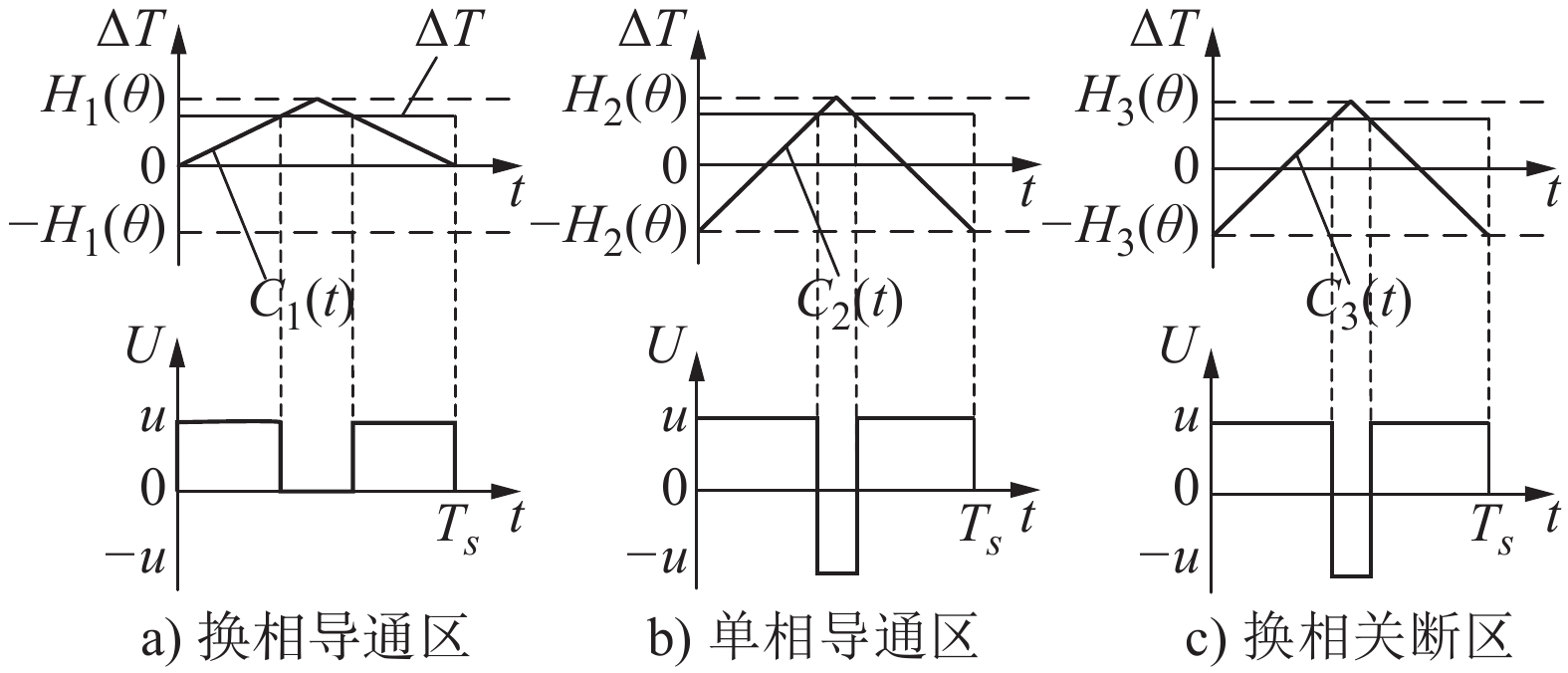
针对基于传统直接瞬时转矩控制的开关磁阻电机因采用固定滞环控制而存在转矩脉动仍然较大的问题,提出一种基于变滞环PWM的直接瞬时转矩控制方法。通过确定开关磁阻电机各相对应的工作区间,建立各区间相应的滞环函数并对函数中各参数进行优化,根据所得优化后的滞环函数及开关磁阻电机当前转子位置角以及相应的转矩偏差,提出采用变滞环PWM控制方法对其功率变换电路中相应功率开关进行控制,以达到对其转矩脉动进行抑制的目的,最后对其效果进行了仿真验证,同时与传统基于固定滞环的直接瞬时转矩控制方法进行了对比分析,结果表明:该方法不仅显著降低了开关磁阻电机的转矩脉动,而且有效提高了其运行效率,因而具有较好的应用价值。
针对基于传统直接瞬时转矩控制的开关磁阻电机因采用固定滞环控制而存在转矩脉动仍然较大的问题,提出一种基于变滞环PWM的直接瞬时转矩控制方法。通过确定开关磁阻电机各相对应的工作区间,建立各区间相应的滞环函数并对函数中各参数进行优化,根据所得优化后的滞环函数及开关磁阻电机当前转子位置角以及相应的转矩偏差,提出采用变滞环PWM控制方法对其功率变换电路中相应功率开关进行控制,以达到对其转矩脉动进行抑制的目的,最后对其效果进行了仿真验证,同时与传统基于固定滞环的直接瞬时转矩控制方法进行了对比分析,结果表明:该方法不仅显著降低了开关磁阻电机的转矩脉动,而且有效提高了其运行效率,因而具有较好的应用价值。


2024, 43(5): 865-873.
doi: 10.13433/j.cnki.1003-8728.20220298
摘要:
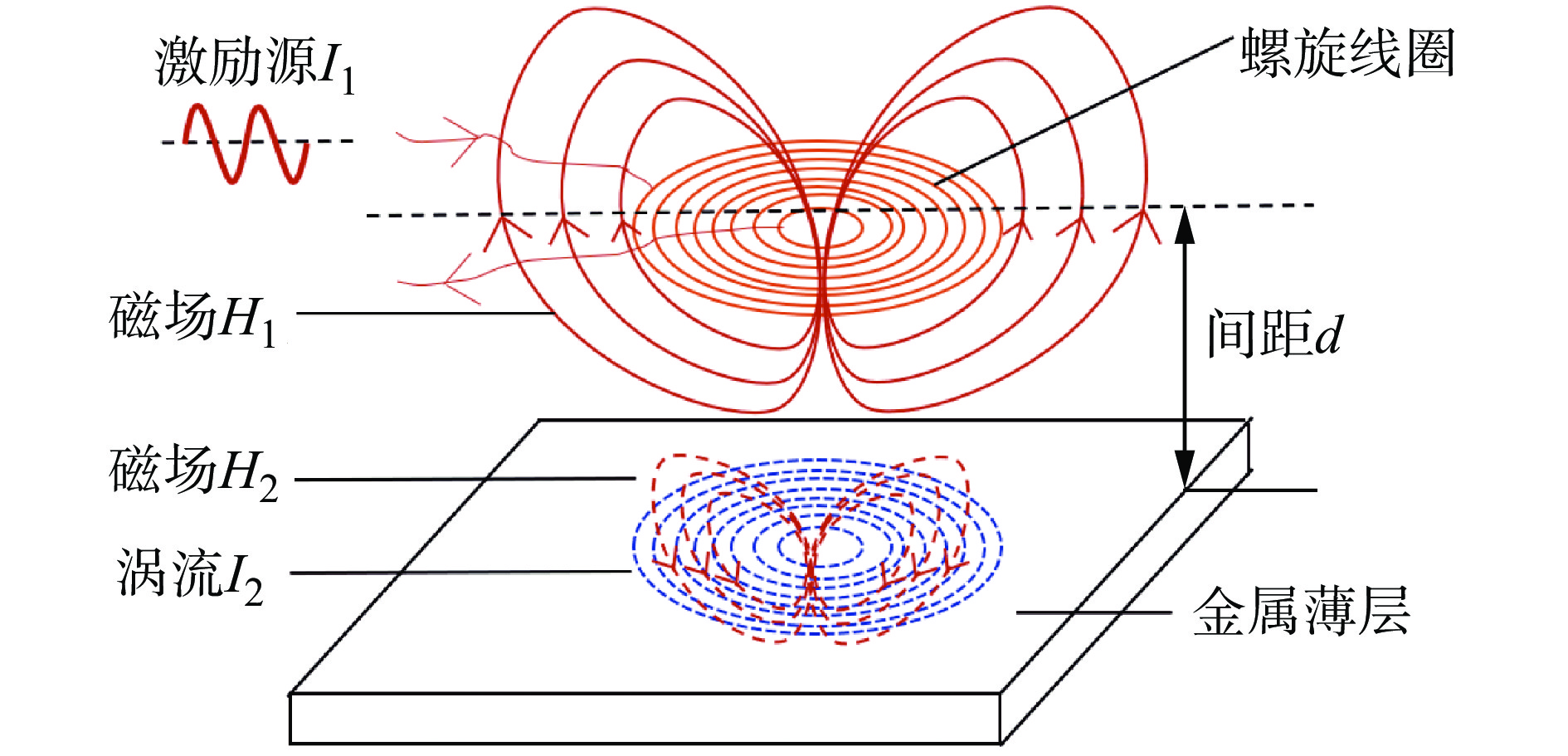
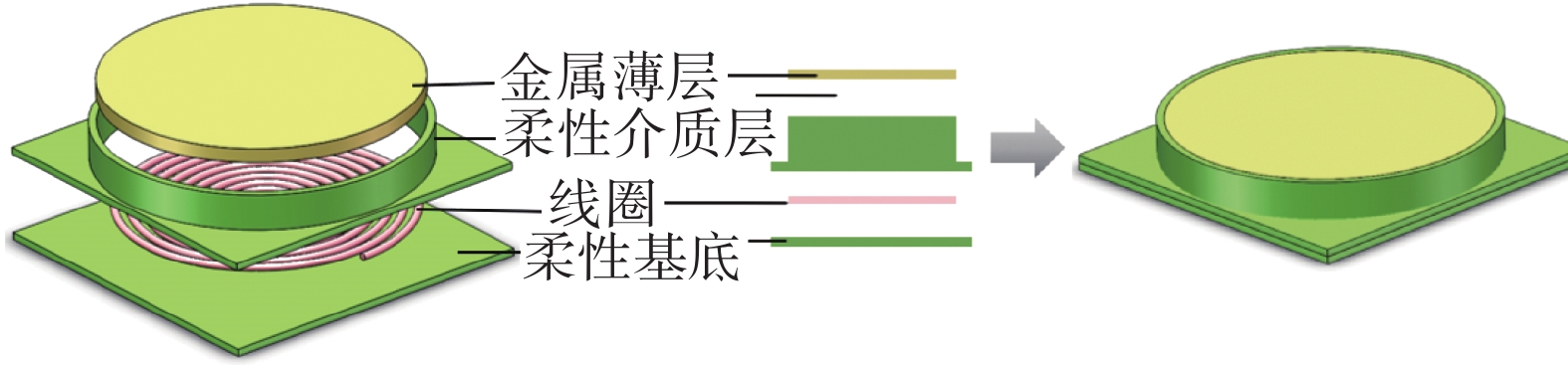
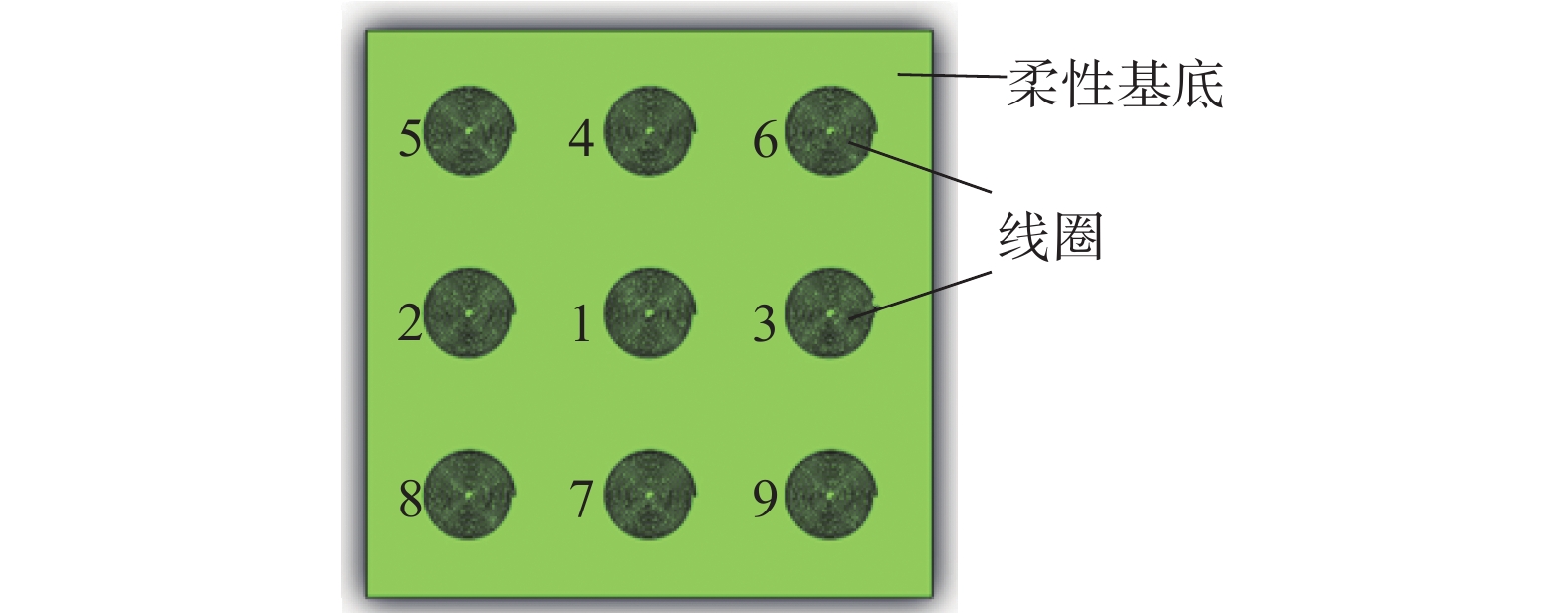
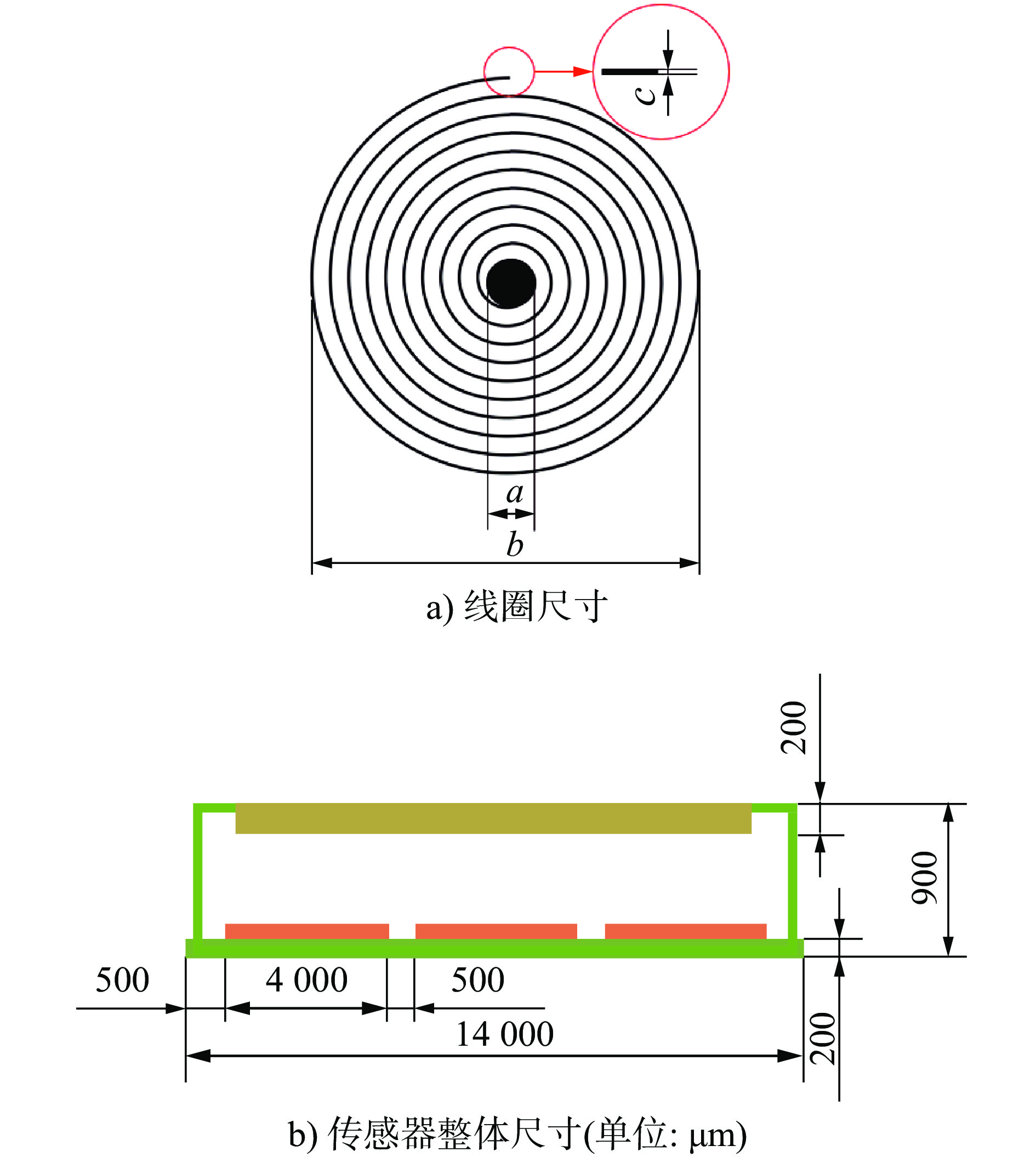
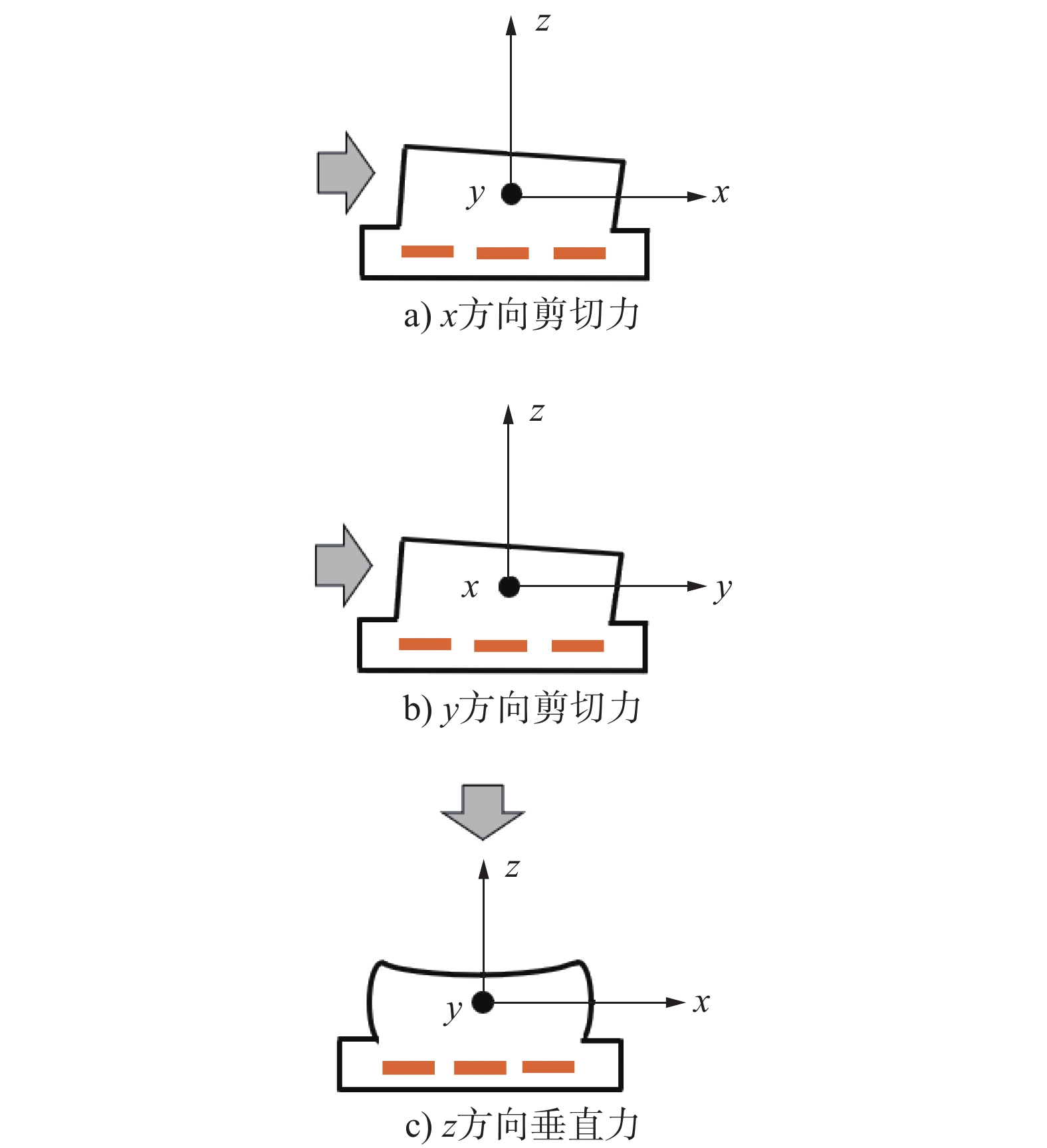
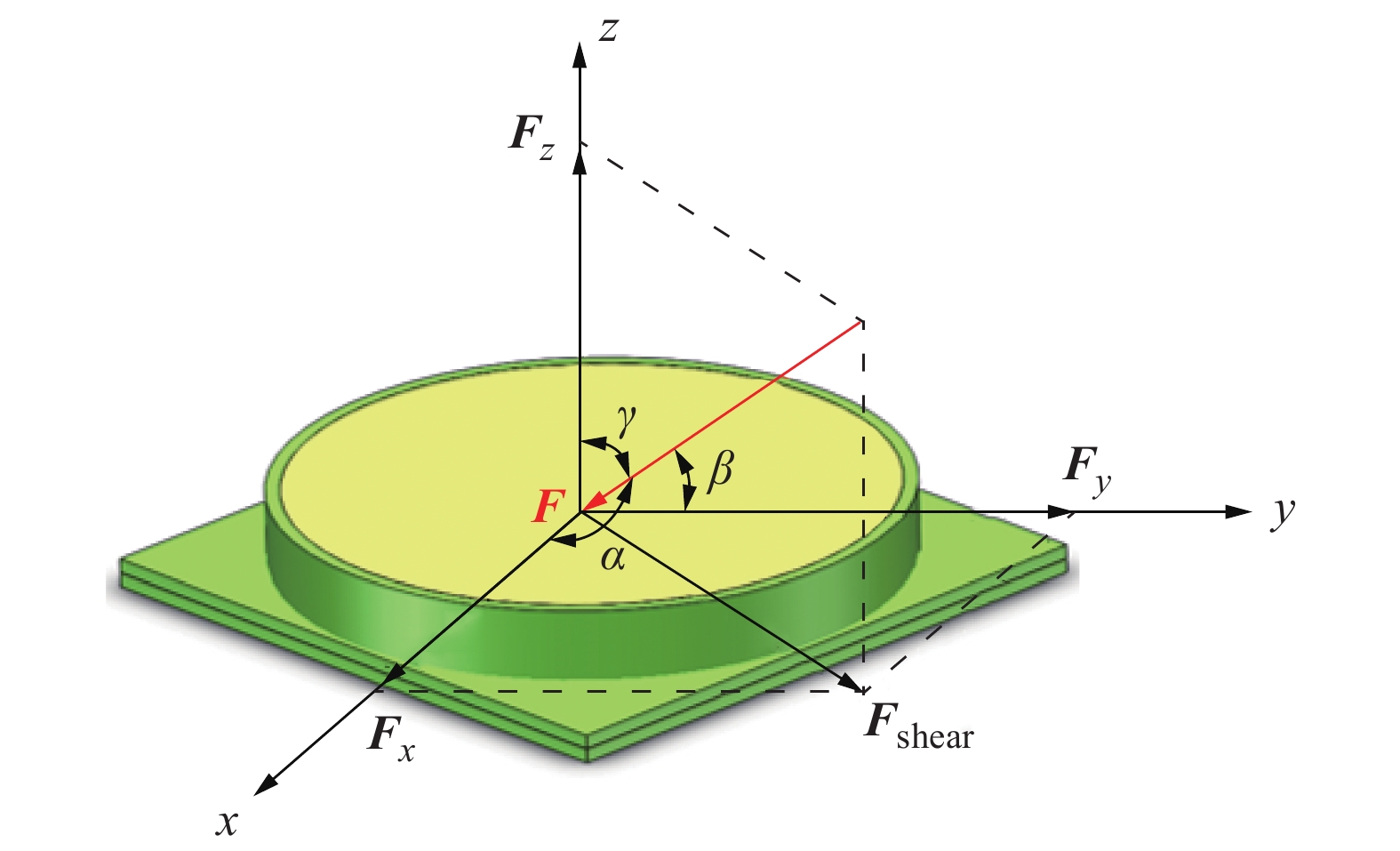
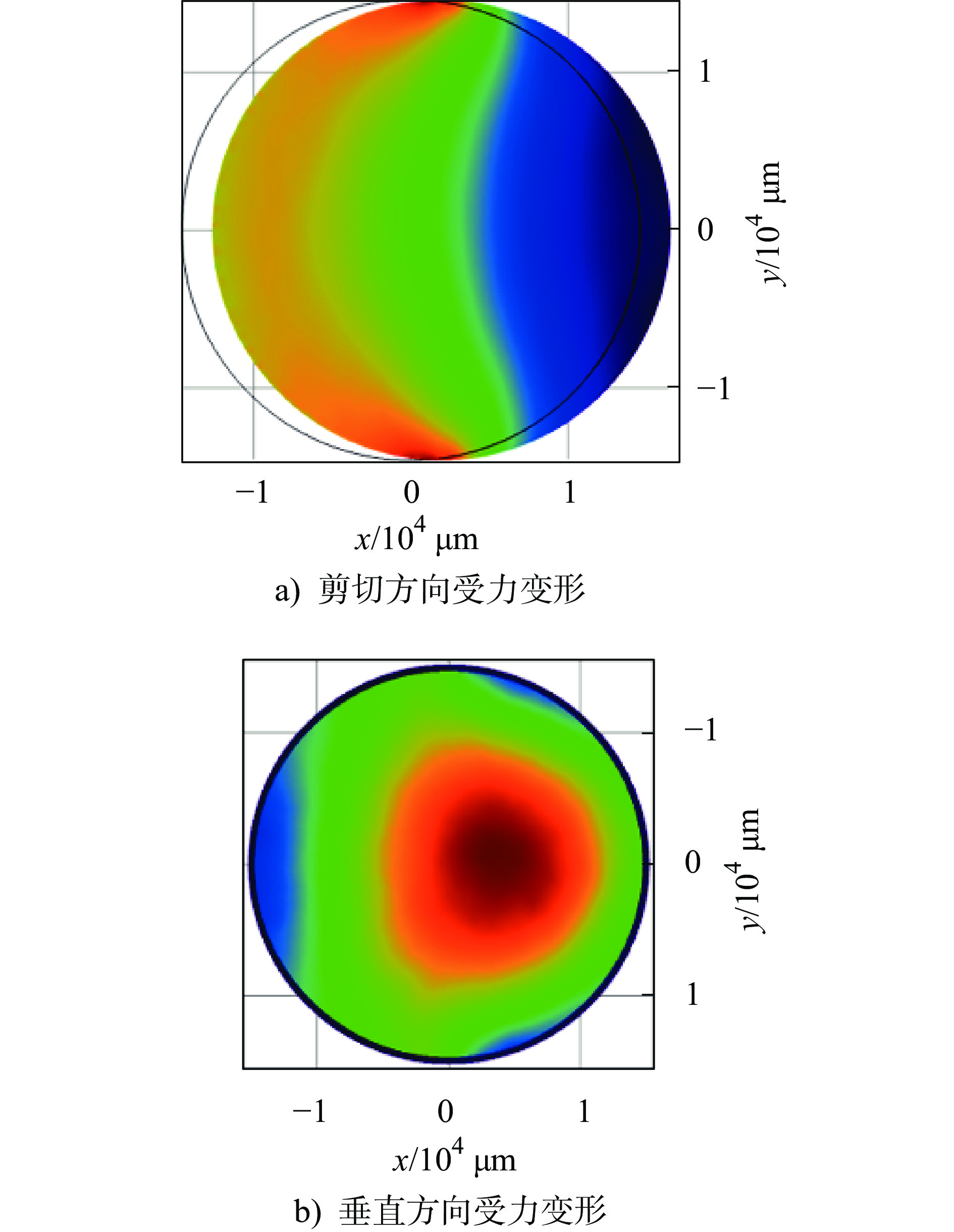
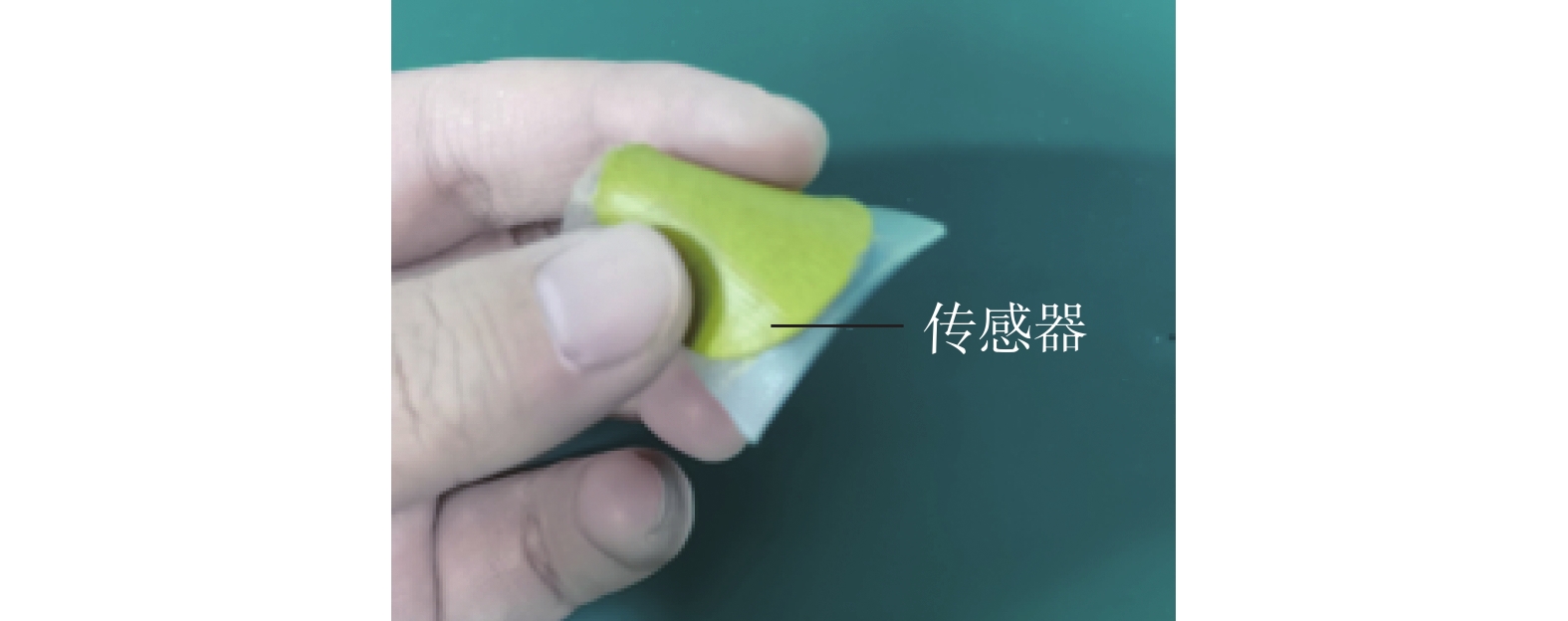
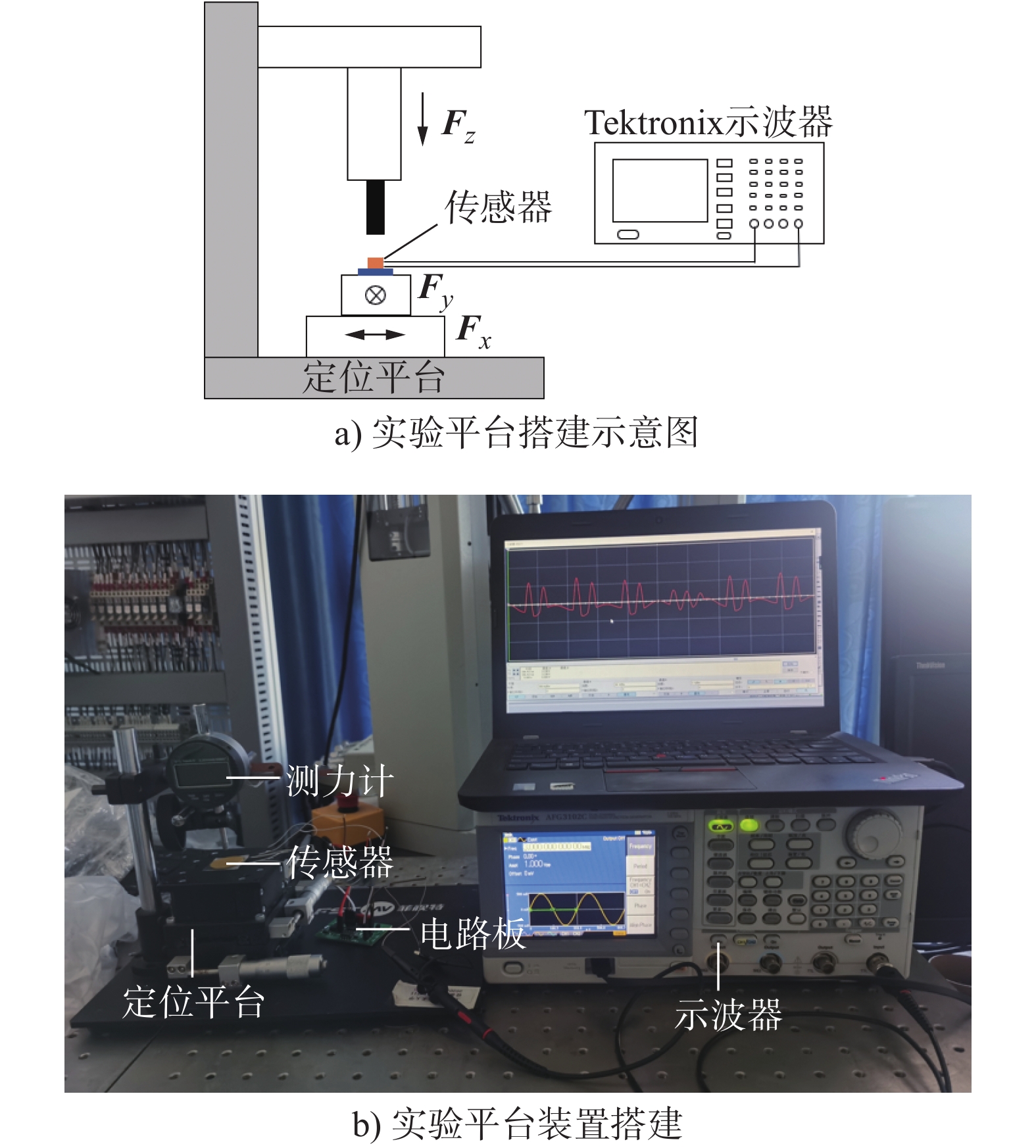
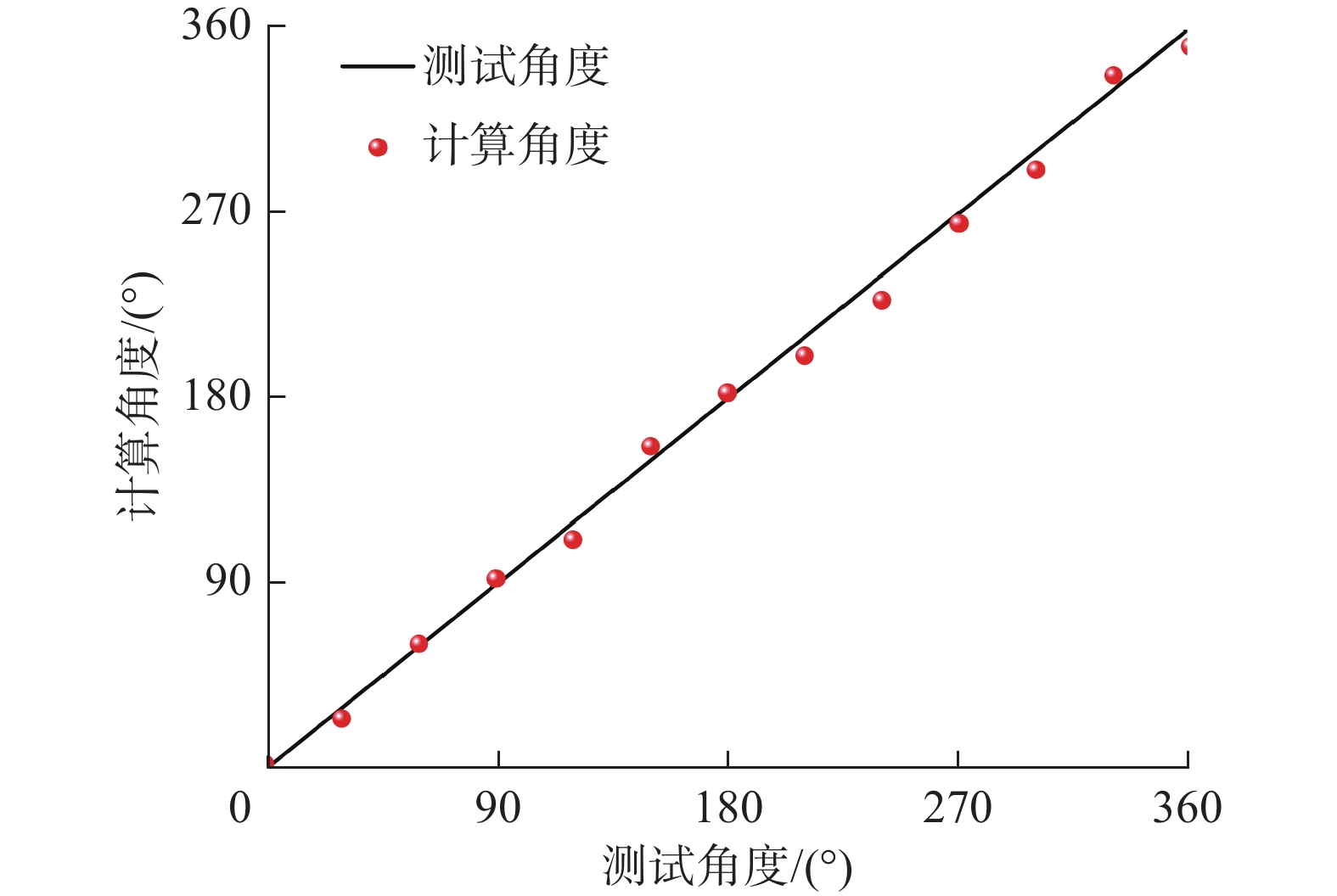
基于电涡流原理设计了一种可检测三维力的柔性触觉传感器。该传感器的结构采用多线圈阵列与柔性材料相结合的方式,外部施加的力使柔性材料形变,从而使金属薄层与线圈的间距改变,进而各线圈的感应电压发生变化。通过外部施加的力与线圈输出的感应电压之间的关系,建立对应的特征函数,判断外力施加的方向和大小。根据所设计的传感器结构确定制造工艺并进行制备,经一系列试验测试了传感器的输出特性,结果表明所设计的传感器具备三维传感能力,满足机器人柔性触觉感知和三维测量工作的需要。
基于电涡流原理设计了一种可检测三维力的柔性触觉传感器。该传感器的结构采用多线圈阵列与柔性材料相结合的方式,外部施加的力使柔性材料形变,从而使金属薄层与线圈的间距改变,进而各线圈的感应电压发生变化。通过外部施加的力与线圈输出的感应电压之间的关系,建立对应的特征函数,判断外力施加的方向和大小。根据所设计的传感器结构确定制造工艺并进行制备,经一系列试验测试了传感器的输出特性,结果表明所设计的传感器具备三维传感能力,满足机器人柔性触觉感知和三维测量工作的需要。



2024, 43(5): 874-881.
doi: 10.13433/j.cnki.1003-8728.20220275
摘要:
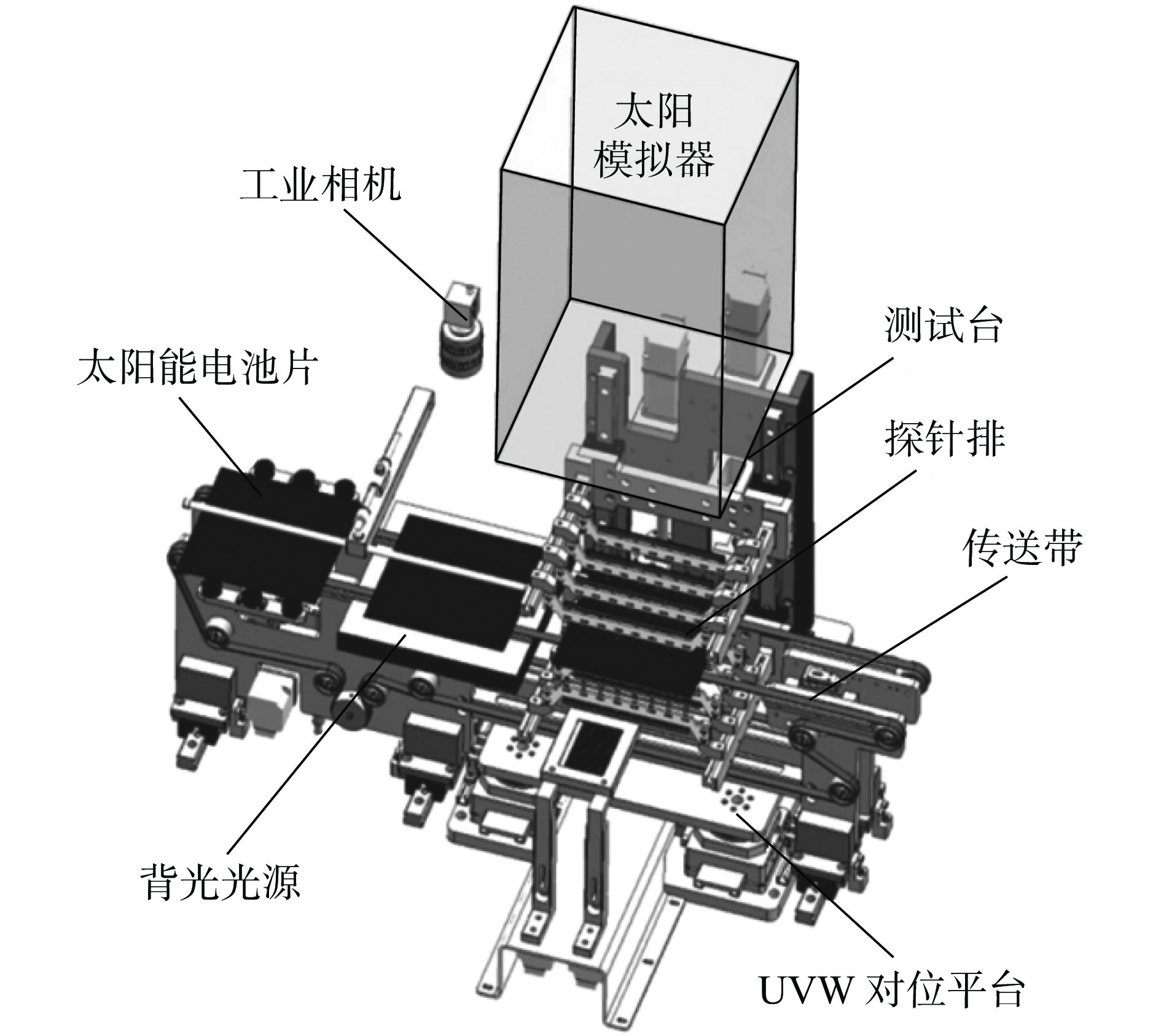
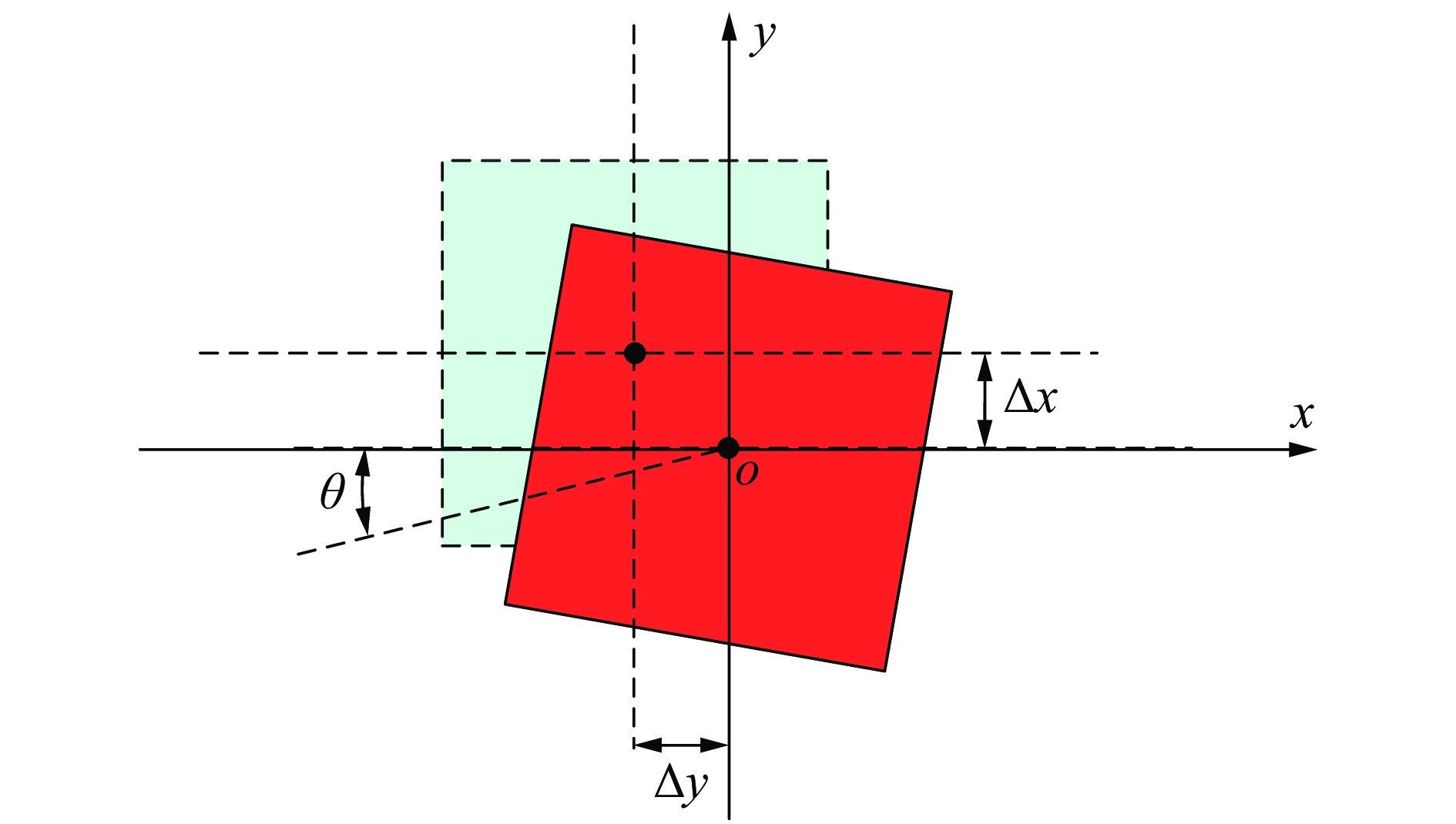
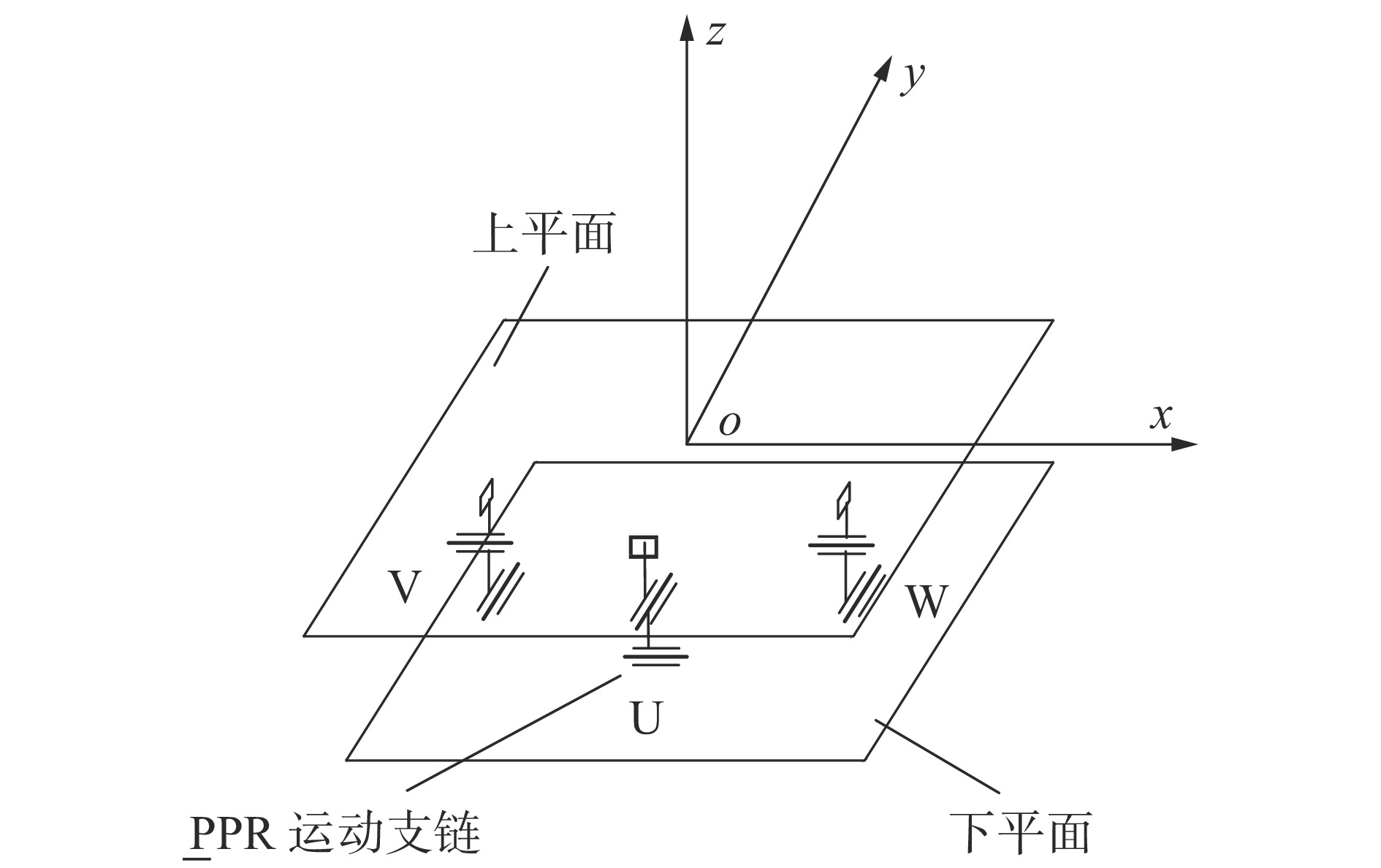
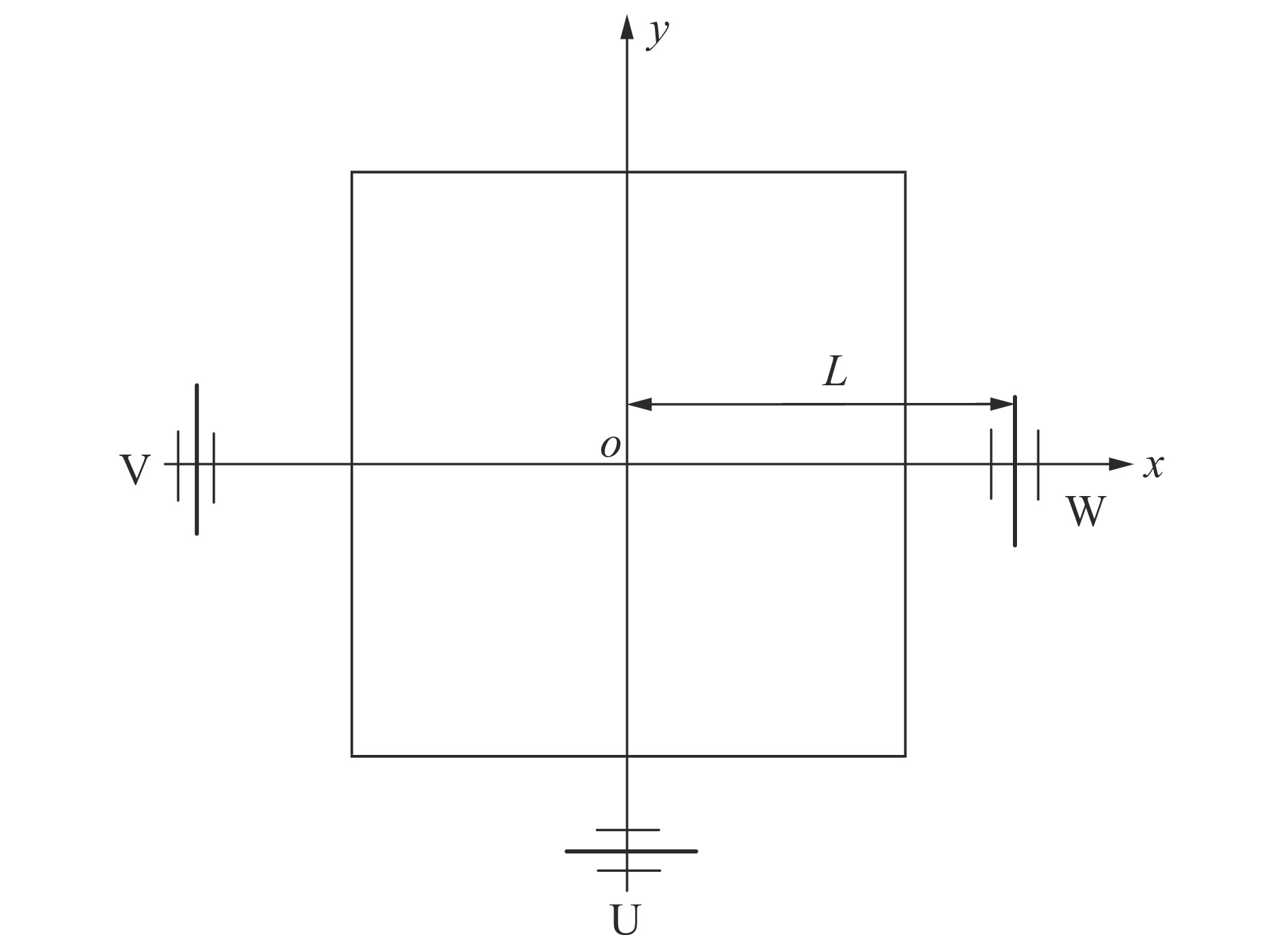
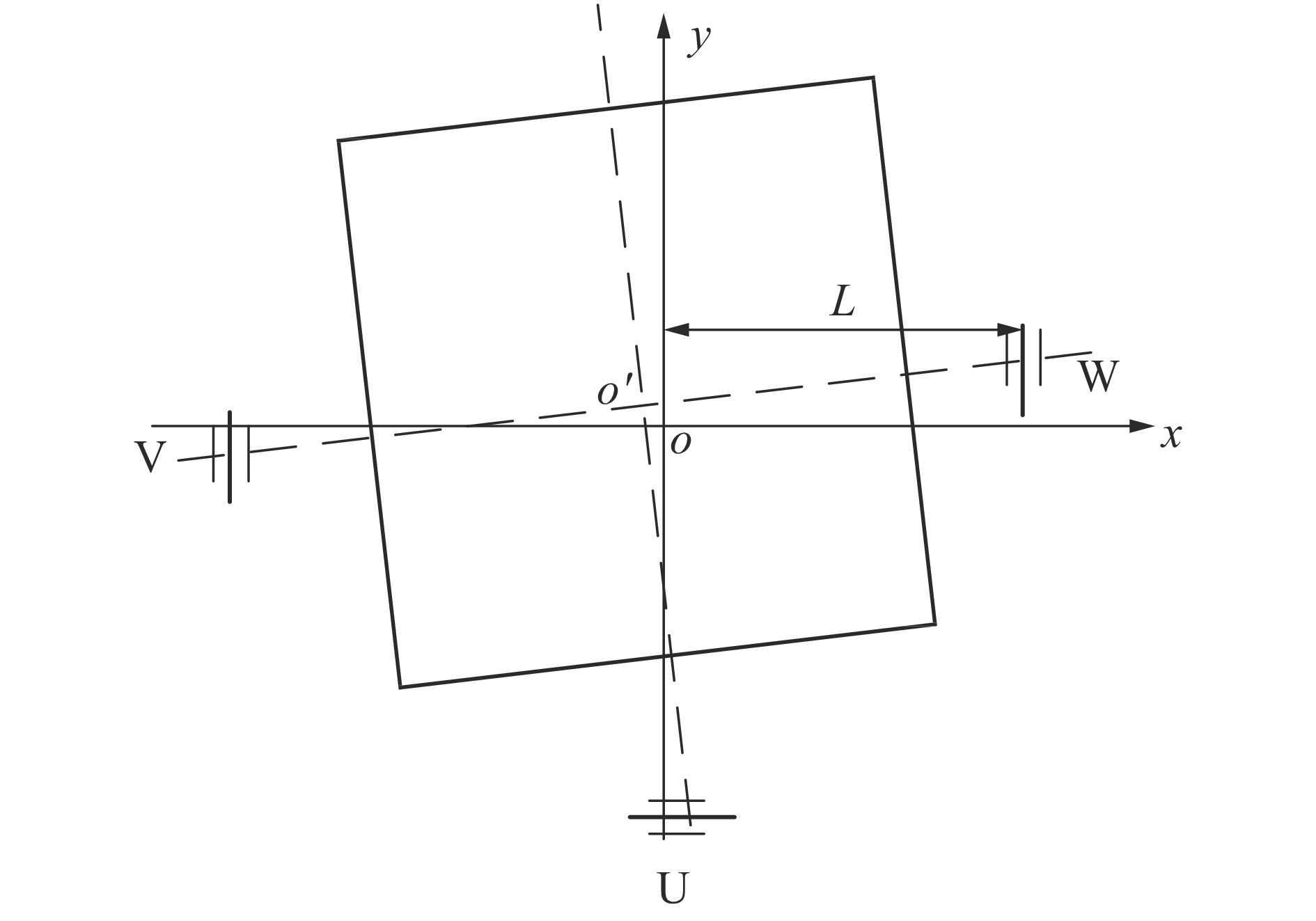
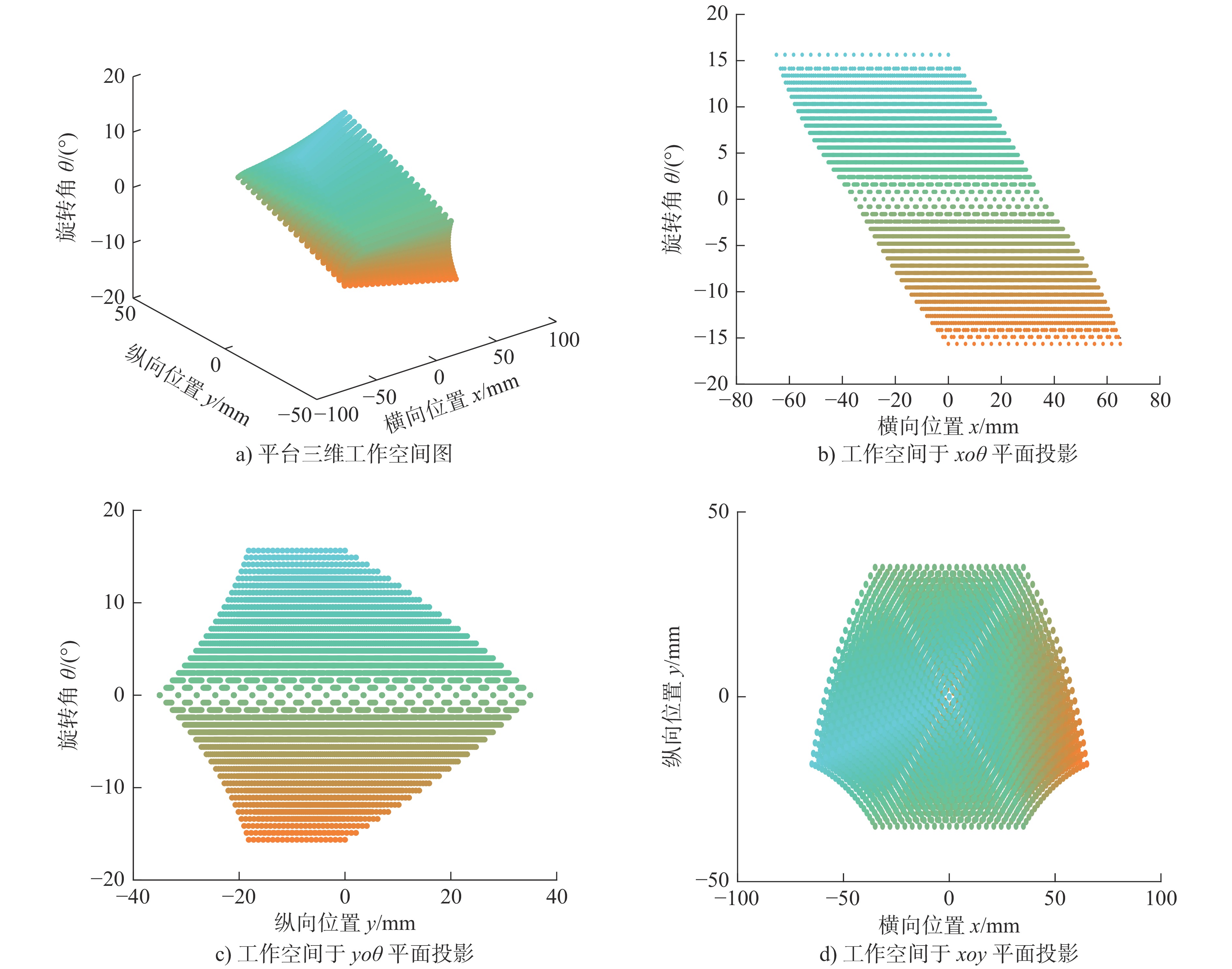
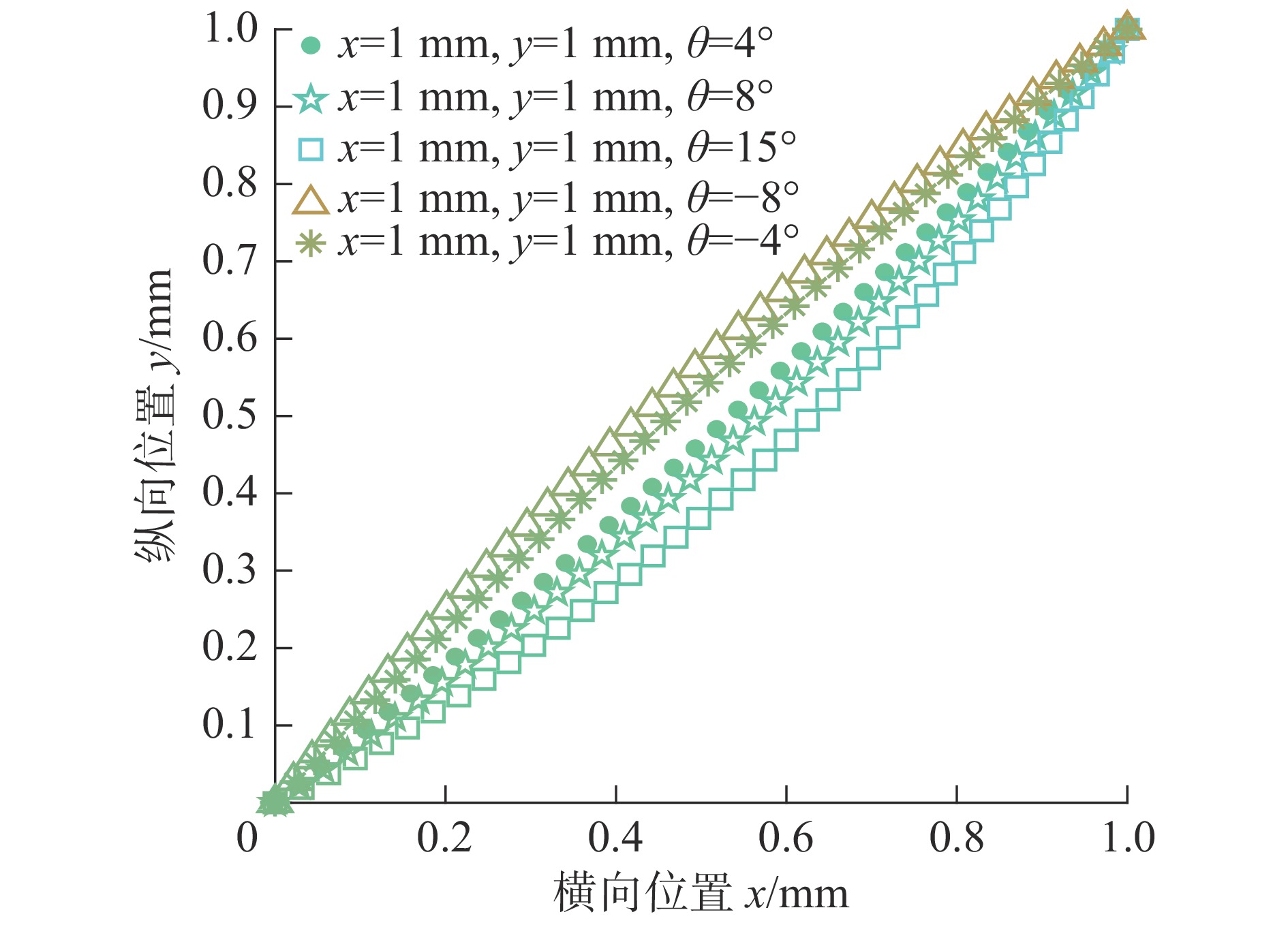
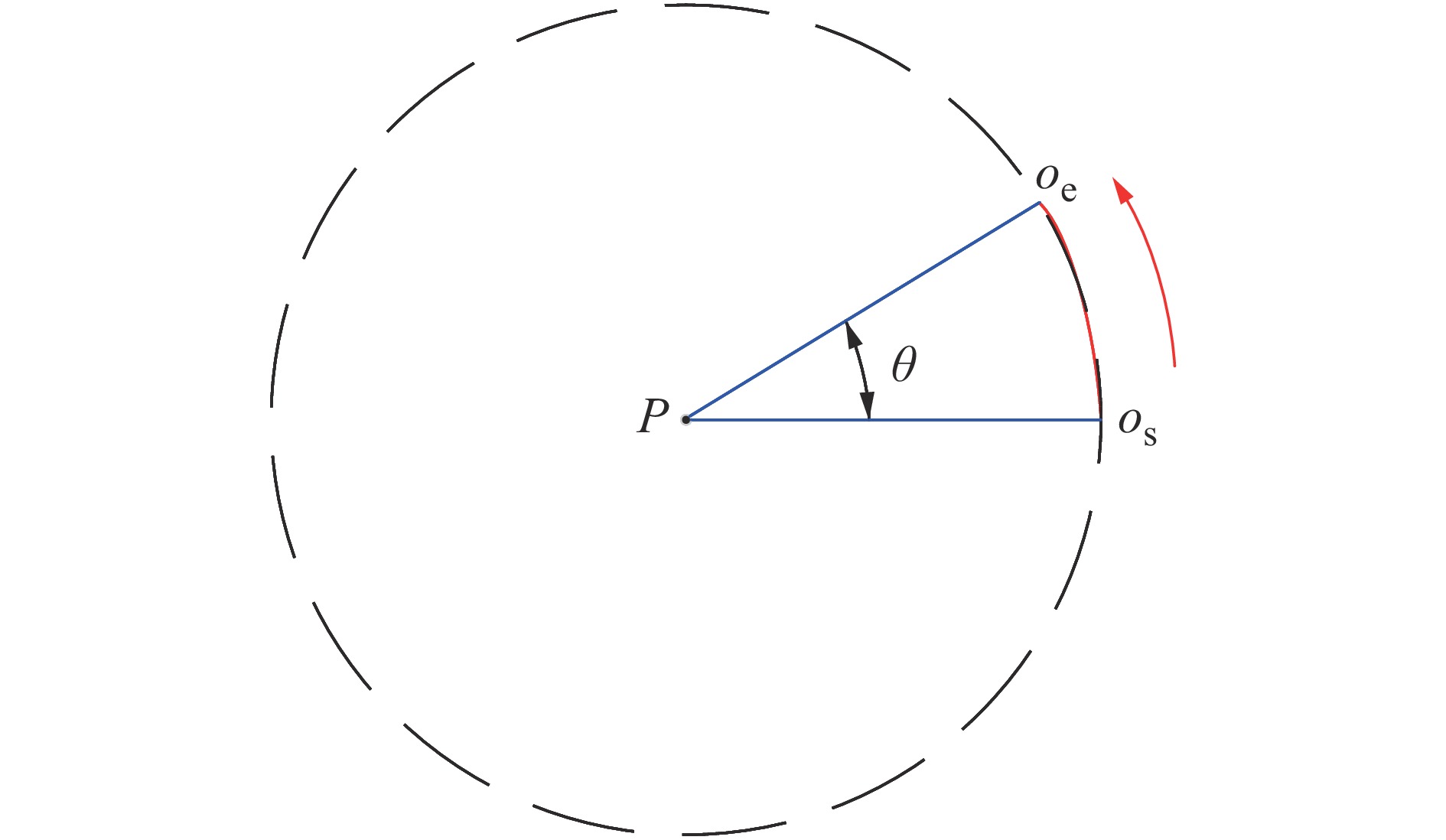
为控制UVW对位平台匀速运动,对平台做了运动学分析,并针对速度下降问题,设计轨迹规划方案。首先,以自由度为基础建立平台二维平面模型,求解位置正反解公式,分析奇异位形,构建三维工作空间。然后,对常用的同步定速法做轨迹分析,由运动轨迹散点图可知:当旋转角绝对值|θ|增大至15°时,平台运动末端速度与初始速度比值下降为0.935,意味着|θ|增大可降低平台运动速度。最后,结合平台自由度与速度变化规律,设计出等角速度瞬心法。通过对比可知,使用等角速度瞬心法平台运动速度保持恒定,消除了旋转角θ引起的速度下降。
为控制UVW对位平台匀速运动,对平台做了运动学分析,并针对速度下降问题,设计轨迹规划方案。首先,以自由度为基础建立平台二维平面模型,求解位置正反解公式,分析奇异位形,构建三维工作空间。然后,对常用的同步定速法做轨迹分析,由运动轨迹散点图可知:当旋转角绝对值|θ|增大至15°时,平台运动末端速度与初始速度比值下降为0.935,意味着|θ|增大可降低平台运动速度。最后,结合平台自由度与速度变化规律,设计出等角速度瞬心法。通过对比可知,使用等角速度瞬心法平台运动速度保持恒定,消除了旋转角θ引起的速度下降。
2024, 43(5): 882-890.
doi: 10.13433/j.cnki.1003-8728.20220249
摘要:
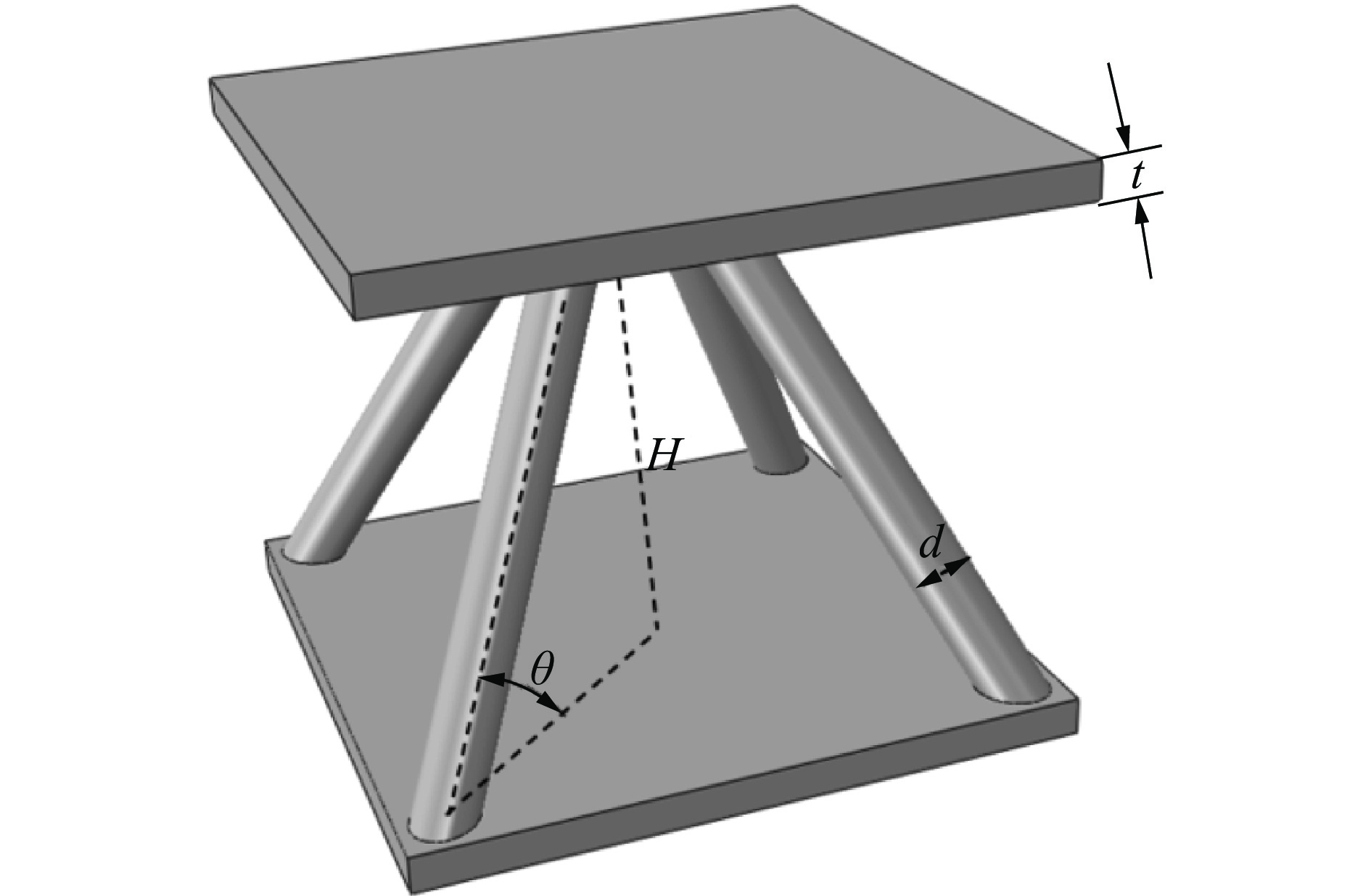
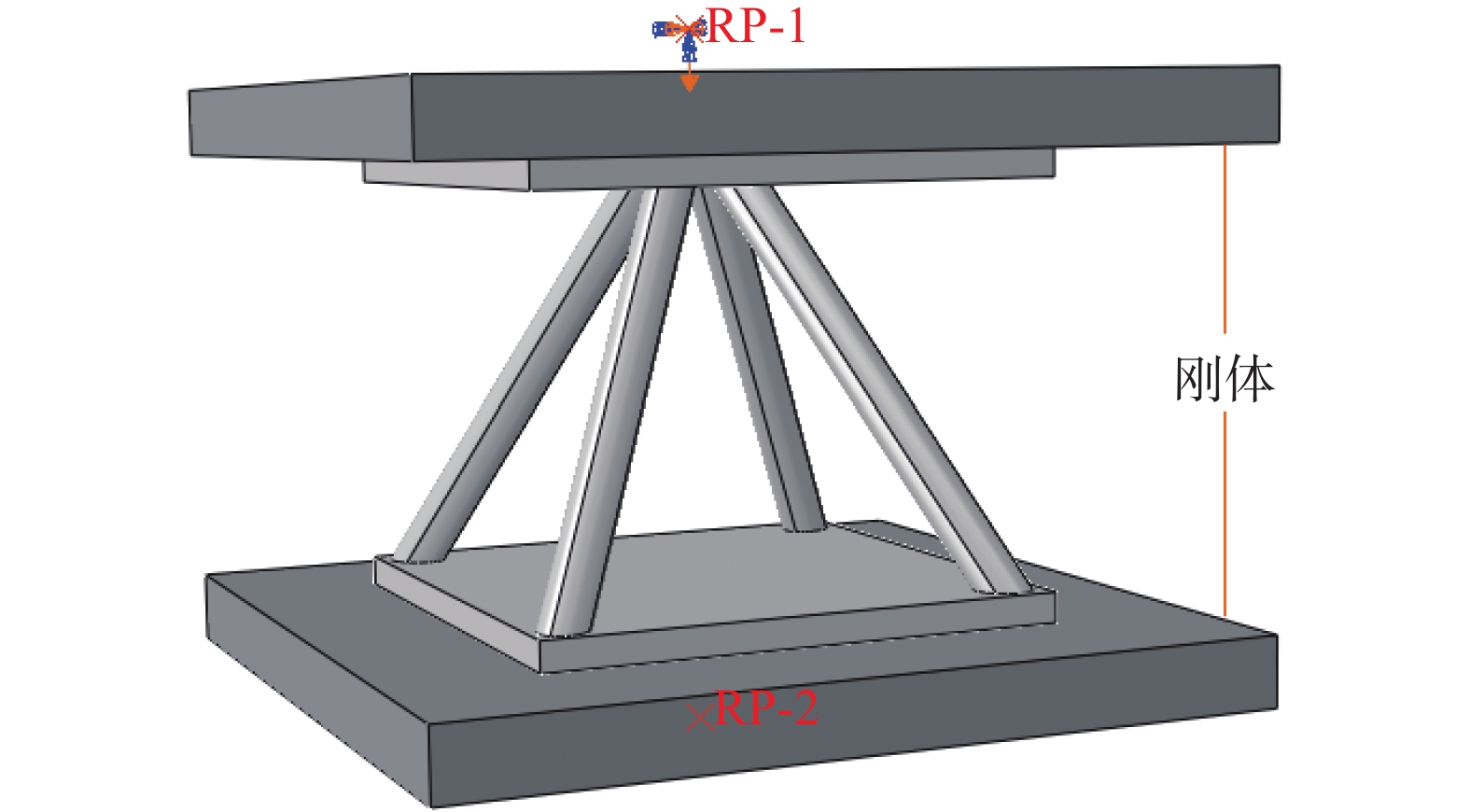
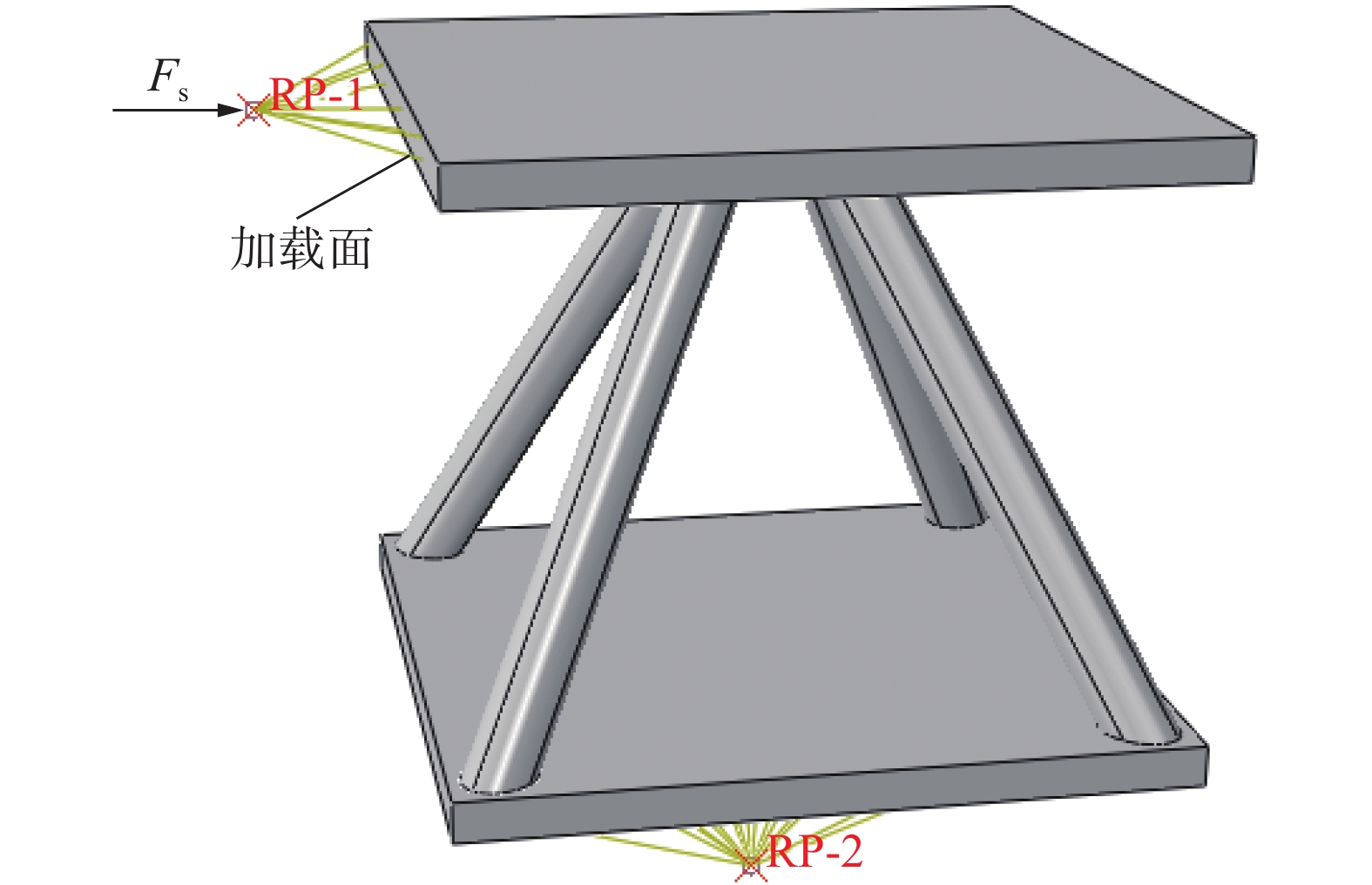
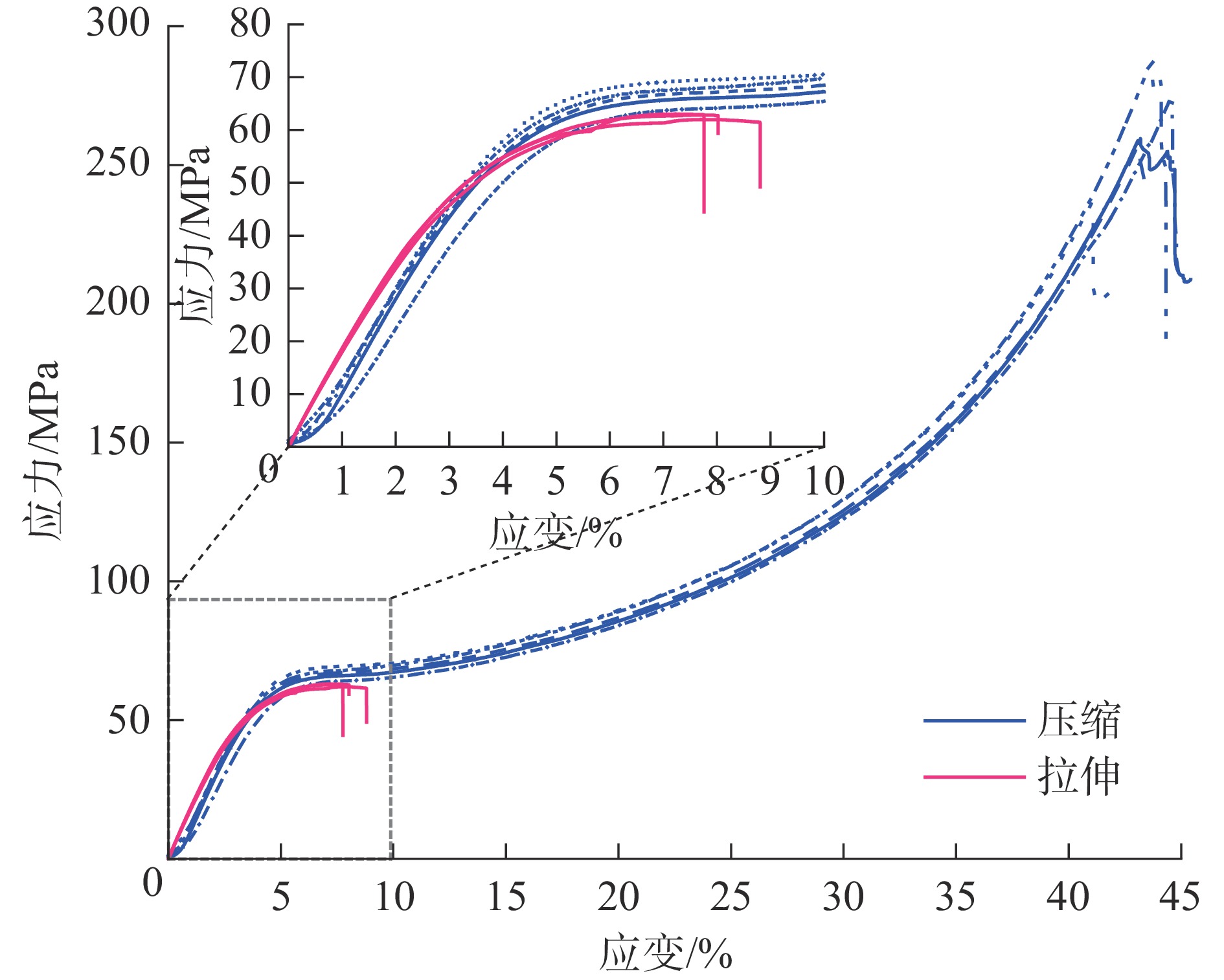
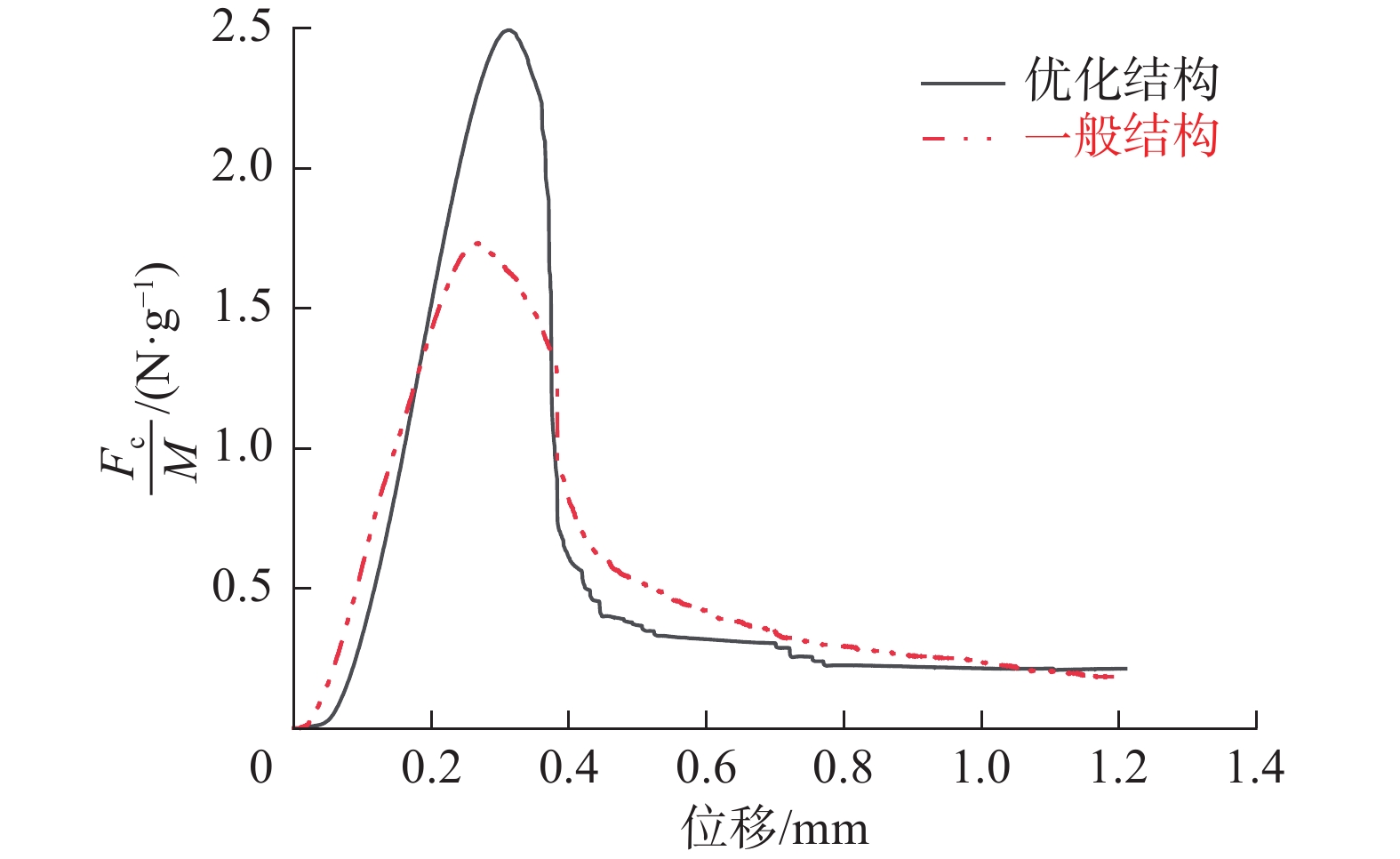
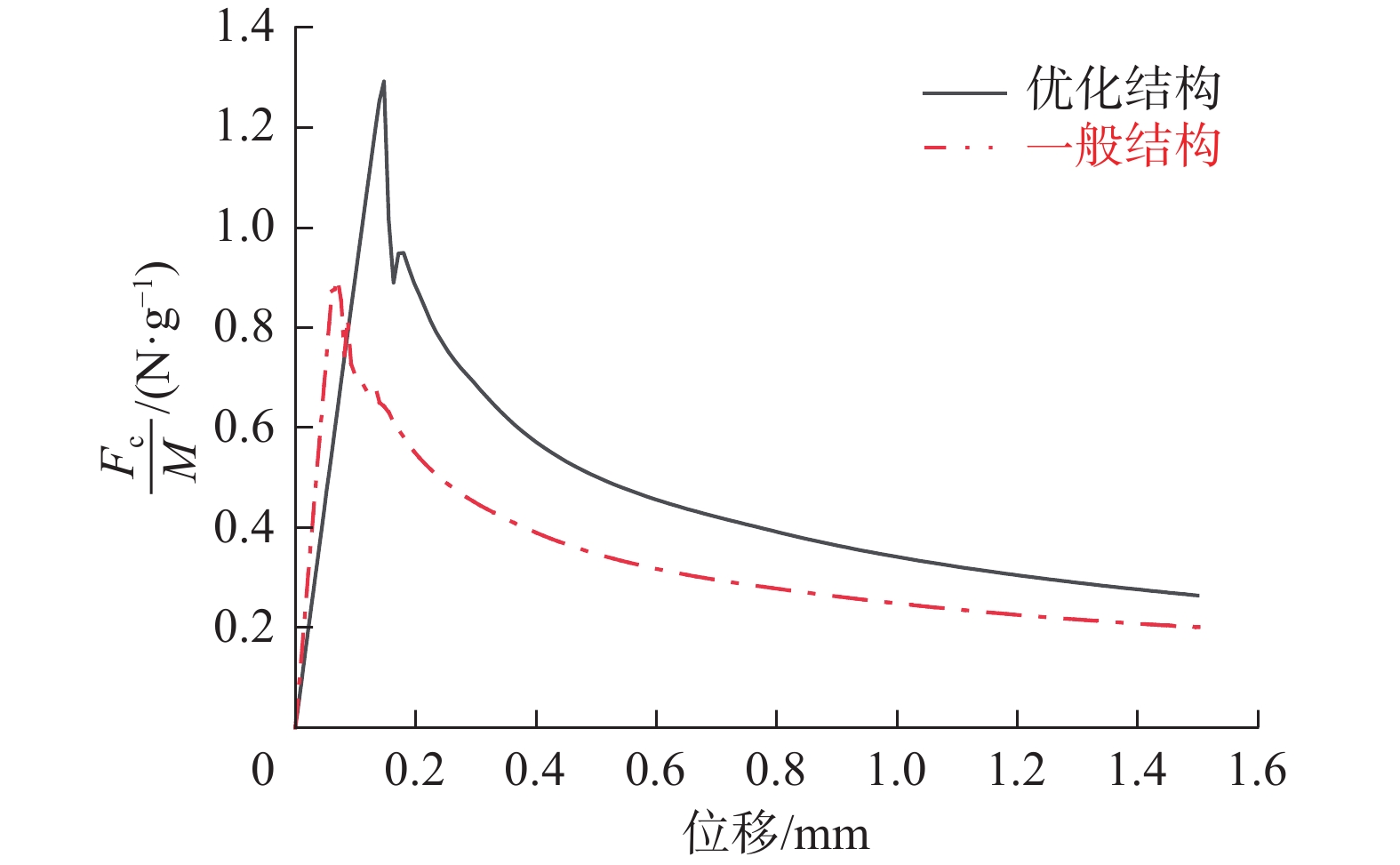
本文以金字塔点阵单元的平压与剪切比极限承载力作为优化目标,基于遗传算法(GA)和响应面法(RSM)对结构参数进行多目标优化,并对优化结果进行有限元和试验验证。研究结果表明:基于遗传算法预测的优化结构与一般结构相比,其平压与剪切比极限承载力预测结果分别提高了30.1%和91.6%;在优化结果验证方面,通过有限元分析得到的优化结构平压和剪切比极限承载力分别提高了39.7%和90.5%;通过试验获得最优结构的平压比极限承载力较一般结构提高了44%。有限元分析和试验均验证了本文优化方法的有效性,可将其推广应用于点阵结构的优化设计。
本文以金字塔点阵单元的平压与剪切比极限承载力作为优化目标,基于遗传算法(GA)和响应面法(RSM)对结构参数进行多目标优化,并对优化结果进行有限元和试验验证。研究结果表明:基于遗传算法预测的优化结构与一般结构相比,其平压与剪切比极限承载力预测结果分别提高了30.1%和91.6%;在优化结果验证方面,通过有限元分析得到的优化结构平压和剪切比极限承载力分别提高了39.7%和90.5%;通过试验获得最优结构的平压比极限承载力较一般结构提高了44%。有限元分析和试验均验证了本文优化方法的有效性,可将其推广应用于点阵结构的优化设计。



2024, 43(5): 891-896.
doi: 10.13433/j.cnki.1003-8728.20240056
摘要:
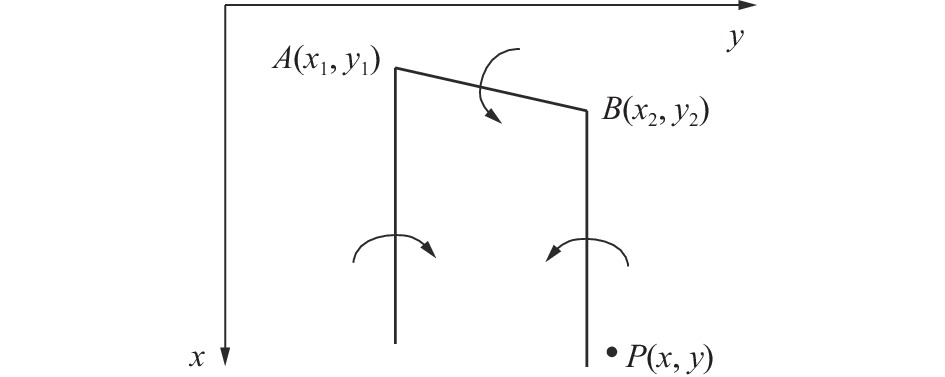
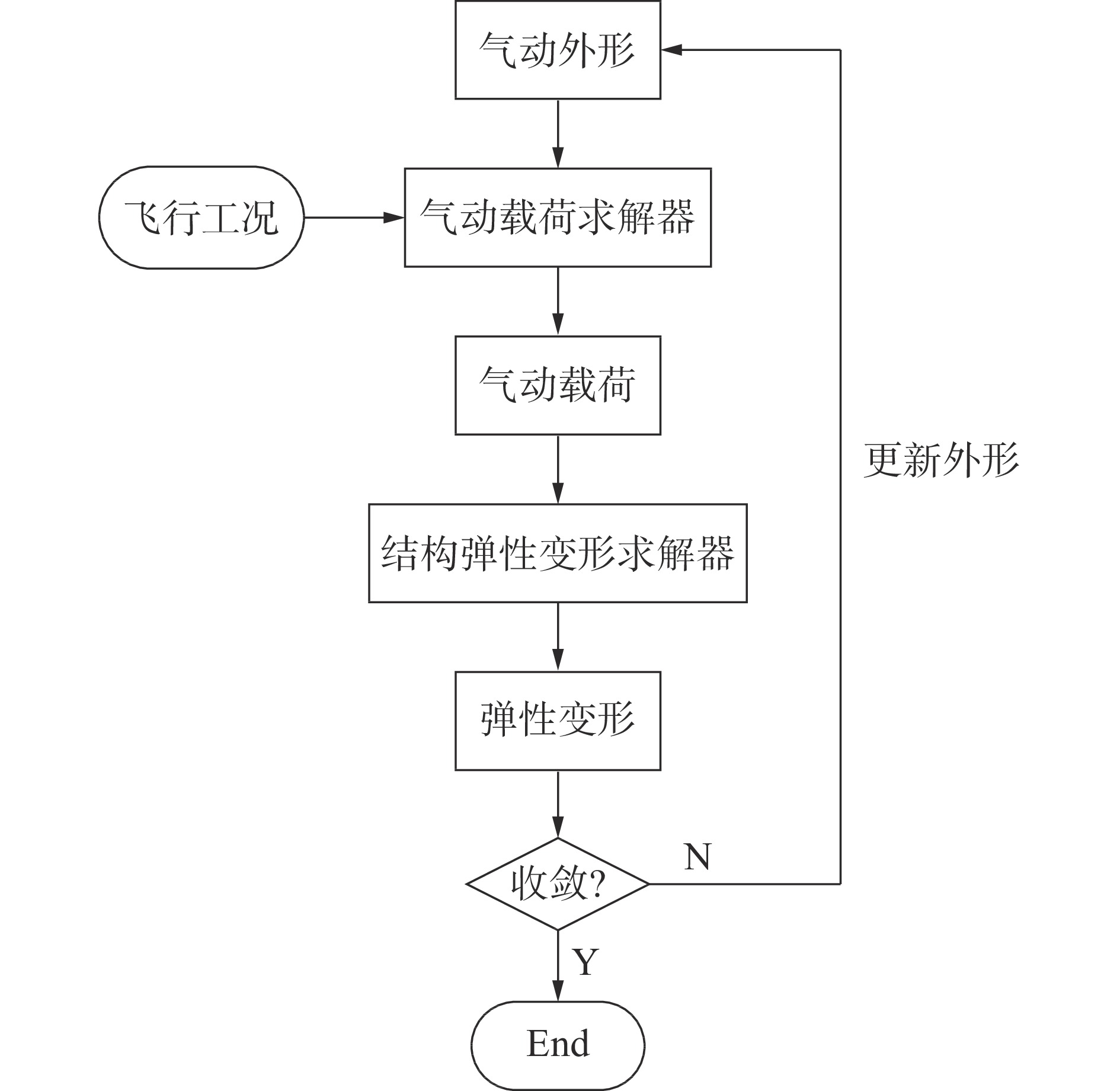
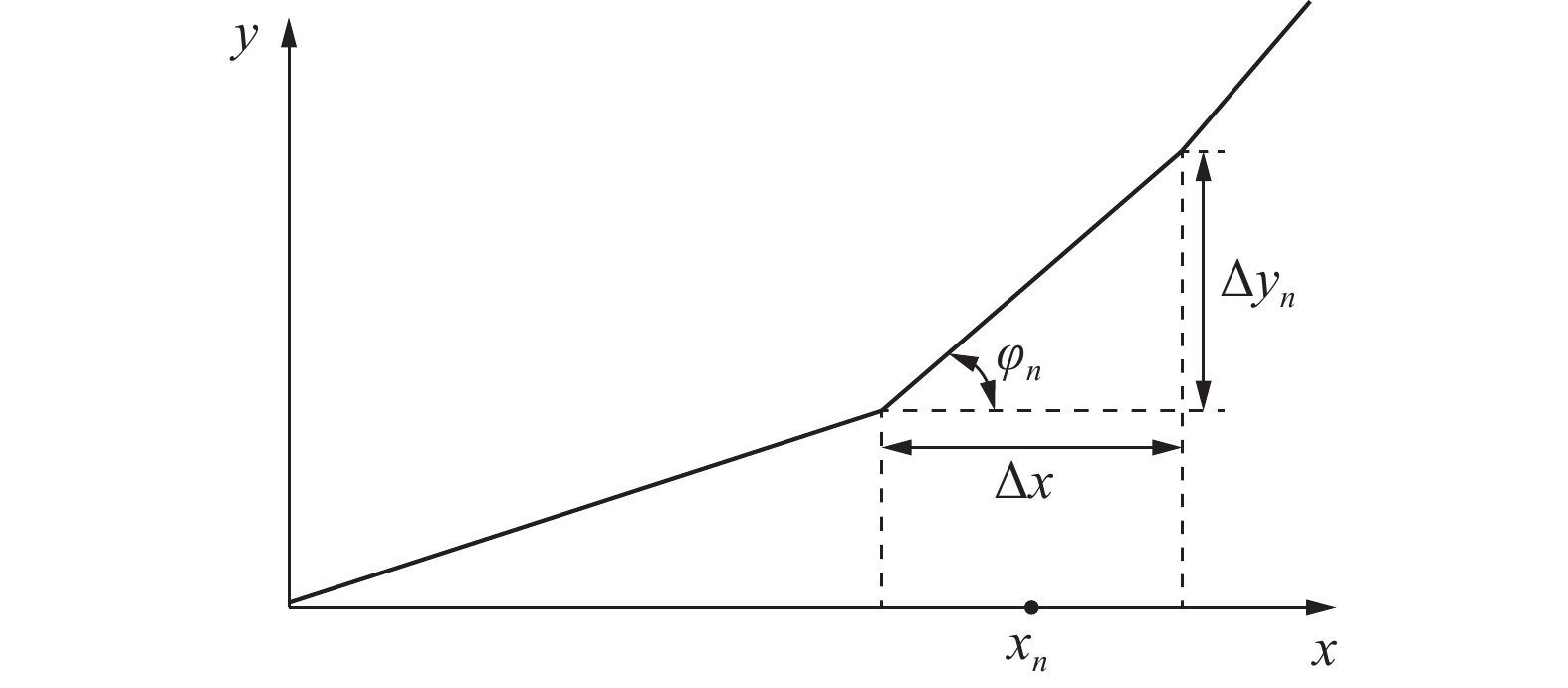
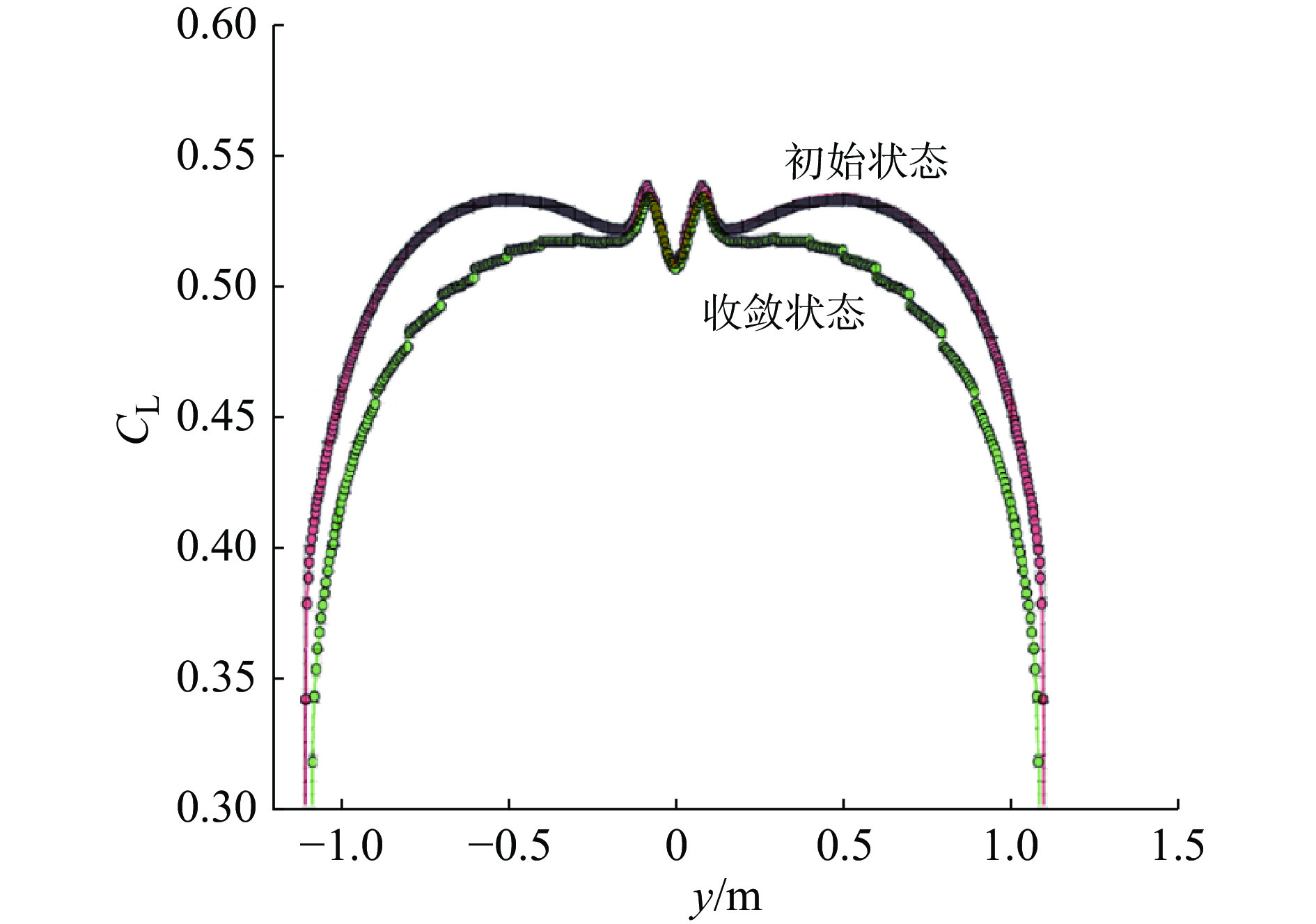
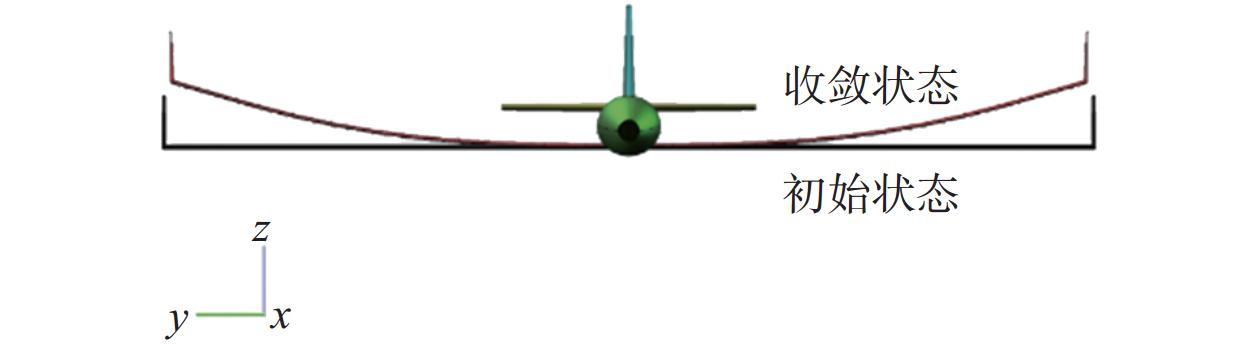
大展弦比柔性机翼在气动载荷作用下会发生弹性变形从而引起气动特性变化,因此在初步设计阶段,希望使用一种高效分析方法研究静气动弹性平衡下机翼气动载荷的重新分布情况。本文提供了一种求解静气动弹性变形和对应气动载荷的高效方法,即采取松耦合策略,假设攻角不变,将未变形状态的载荷加载到结构上,计算出结构变形,再由变形后的气动外形计算气动载荷分布,反复迭代至变形/载荷收敛,得到机翼最终气动弹性载荷分布情况和气动特性。采用大展弦比弹性模型飞机算例表明了该方法的可行性。
大展弦比柔性机翼在气动载荷作用下会发生弹性变形从而引起气动特性变化,因此在初步设计阶段,希望使用一种高效分析方法研究静气动弹性平衡下机翼气动载荷的重新分布情况。本文提供了一种求解静气动弹性变形和对应气动载荷的高效方法,即采取松耦合策略,假设攻角不变,将未变形状态的载荷加载到结构上,计算出结构变形,再由变形后的气动外形计算气动载荷分布,反复迭代至变形/载荷收敛,得到机翼最终气动弹性载荷分布情况和气动特性。采用大展弦比弹性模型飞机算例表明了该方法的可行性。

2024, 43(5): 897-903.
doi: 10.13433/j.cnki.1003-8728.20220280
摘要:
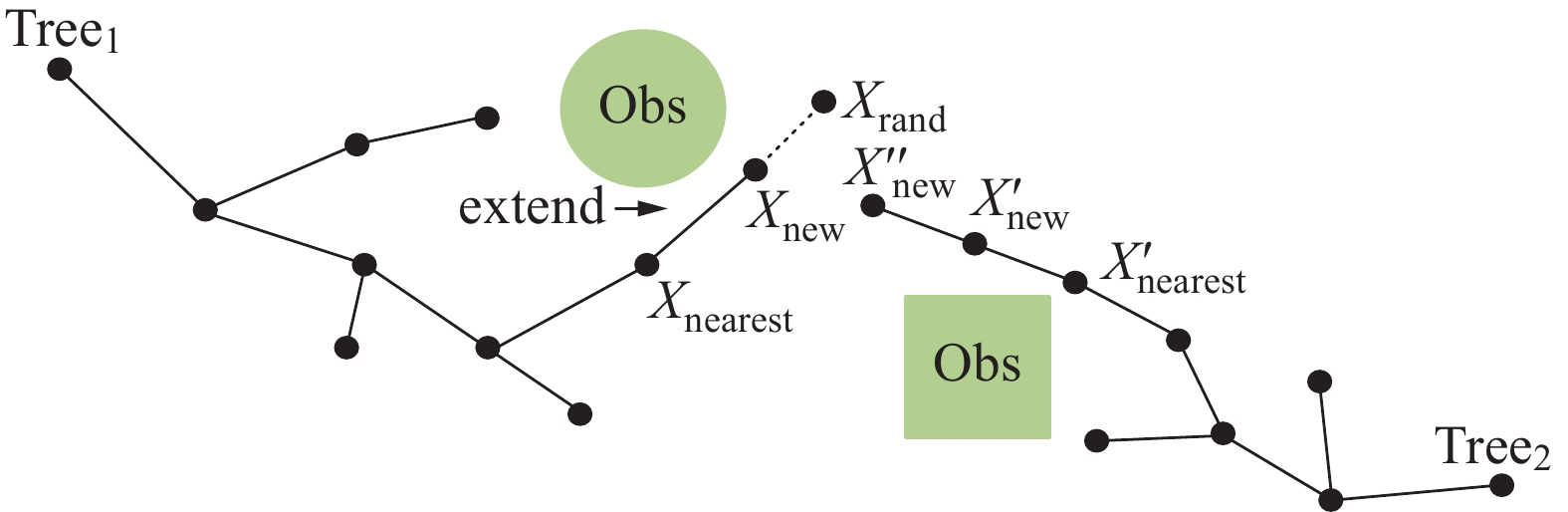
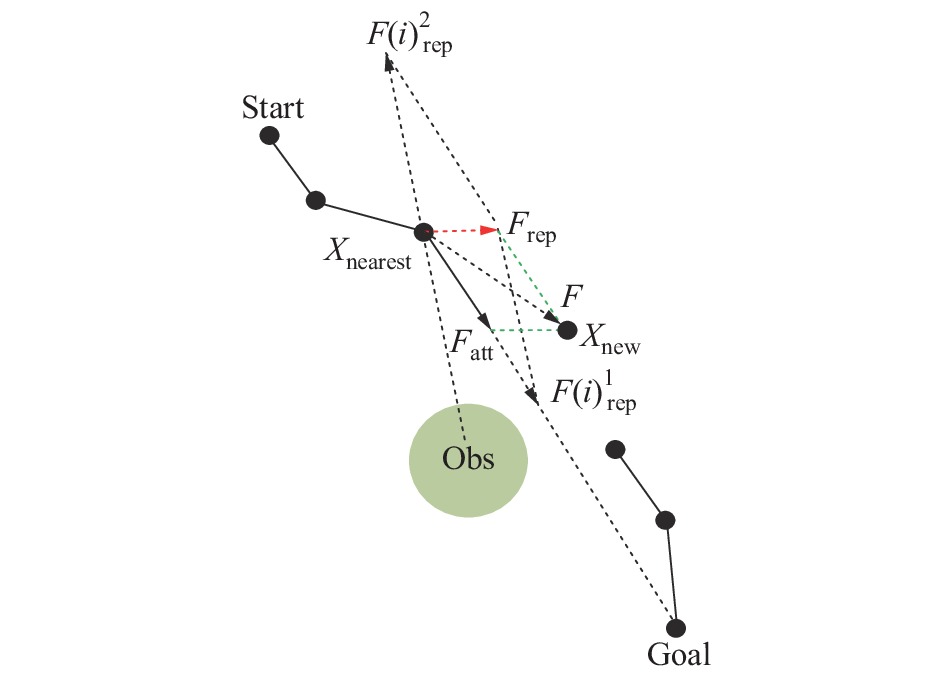
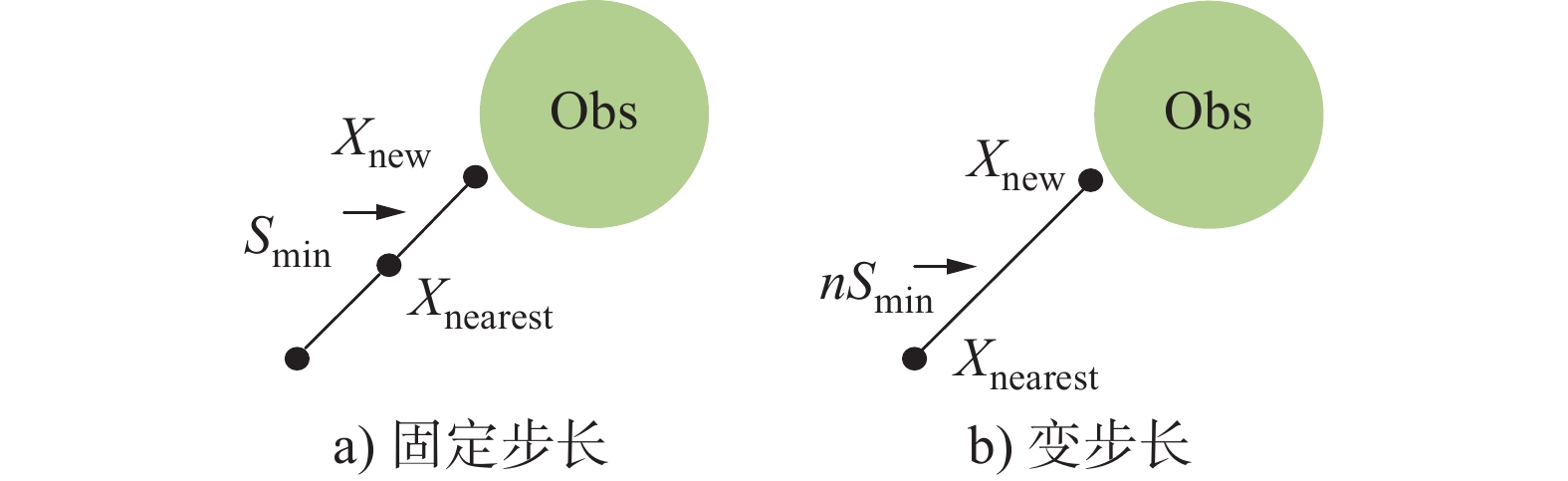
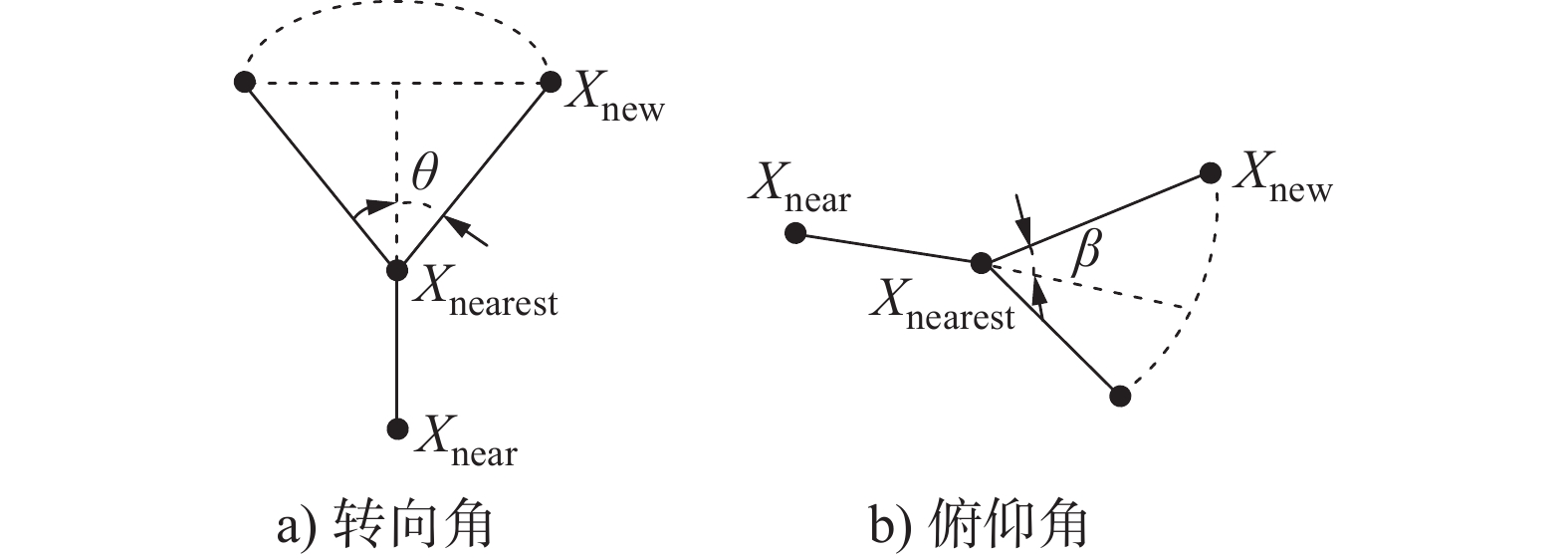
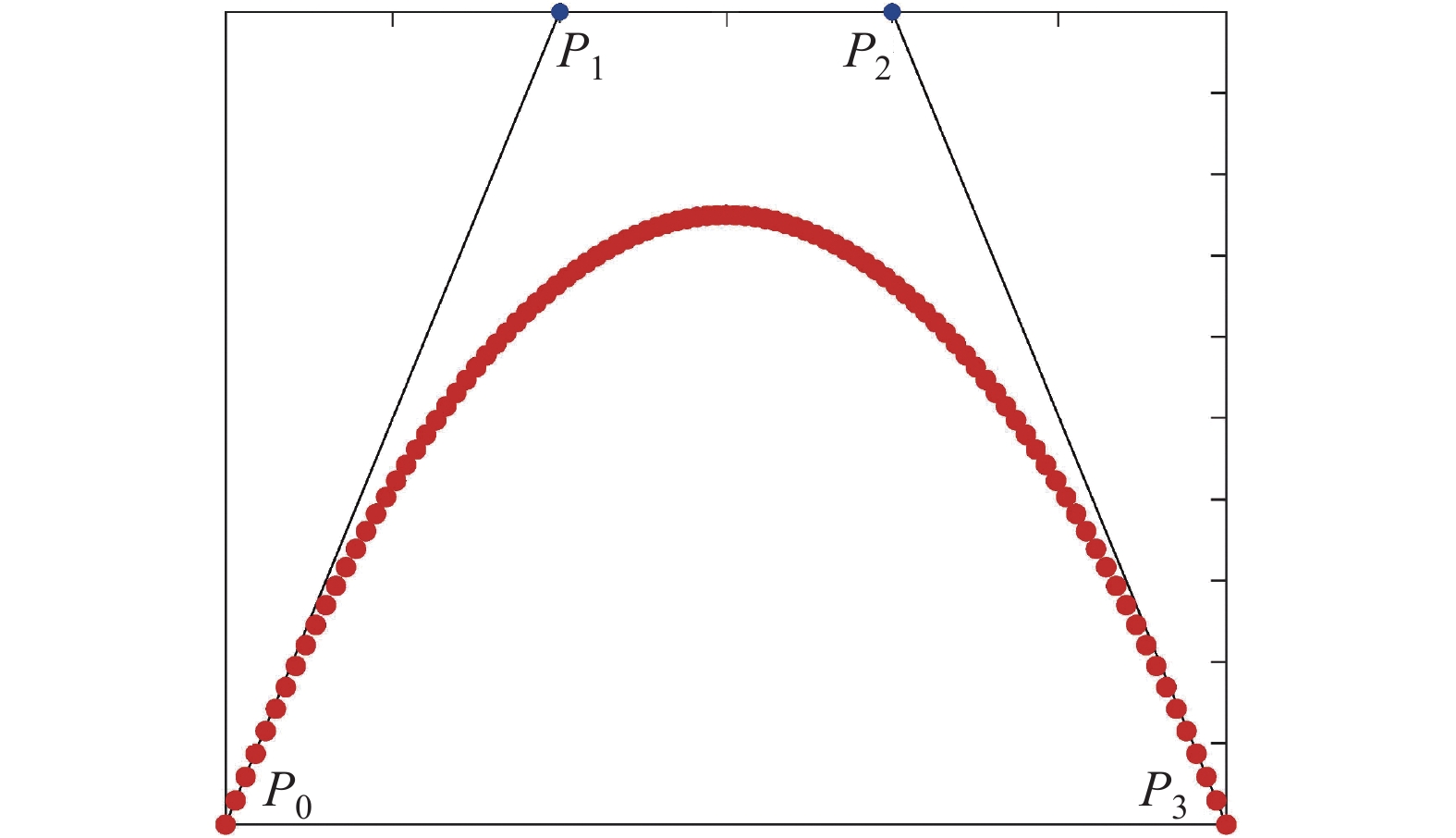
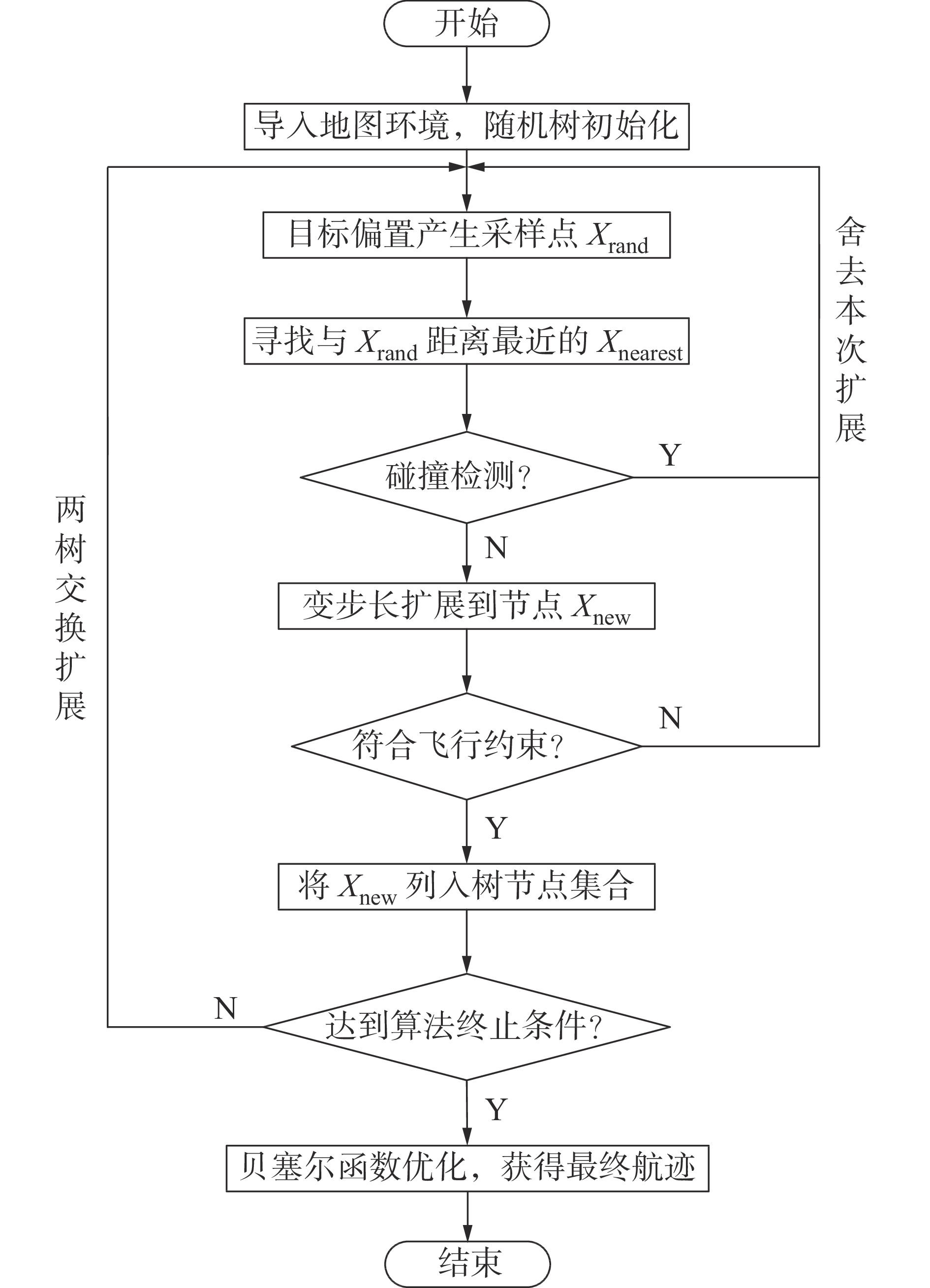
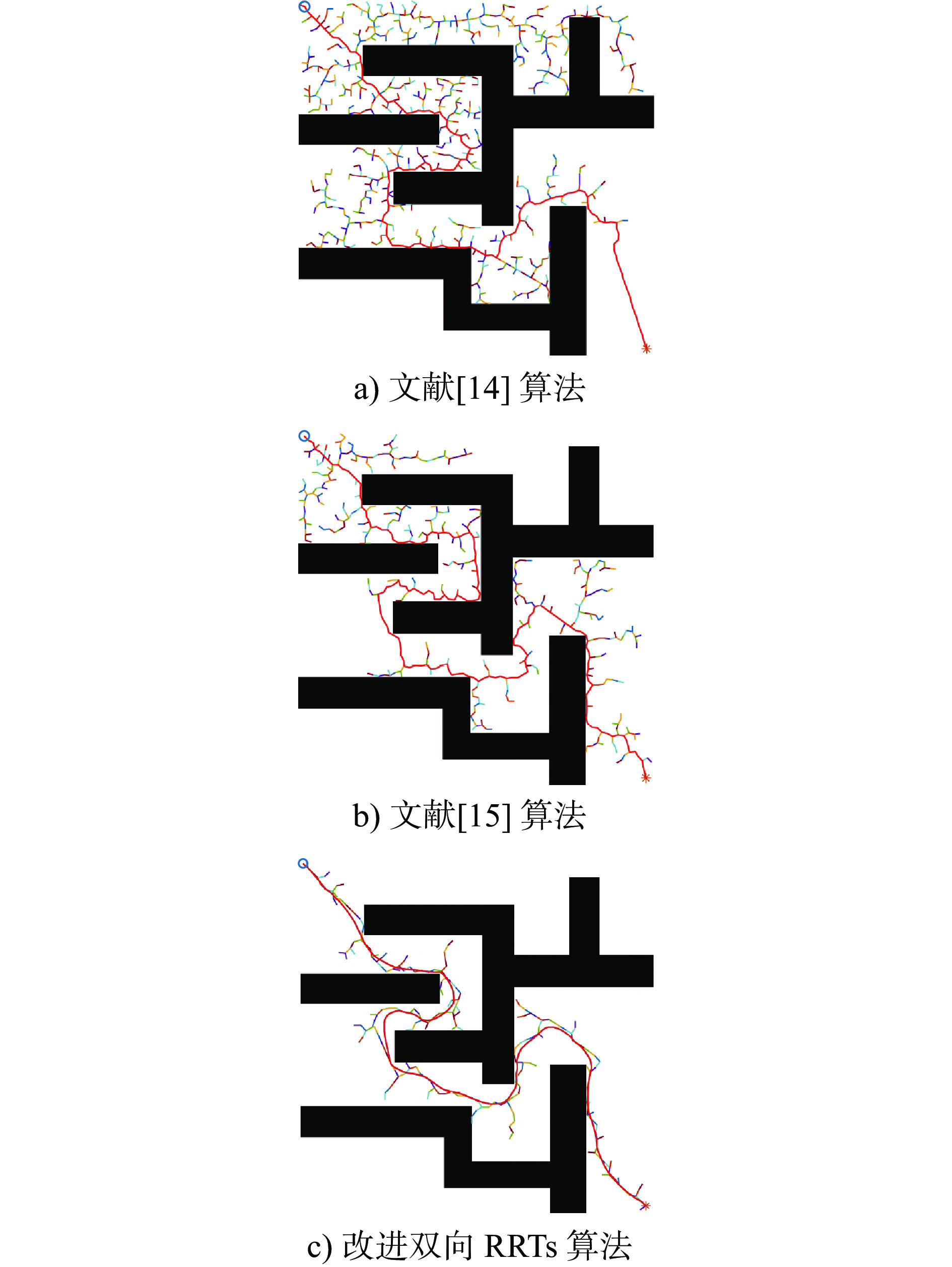
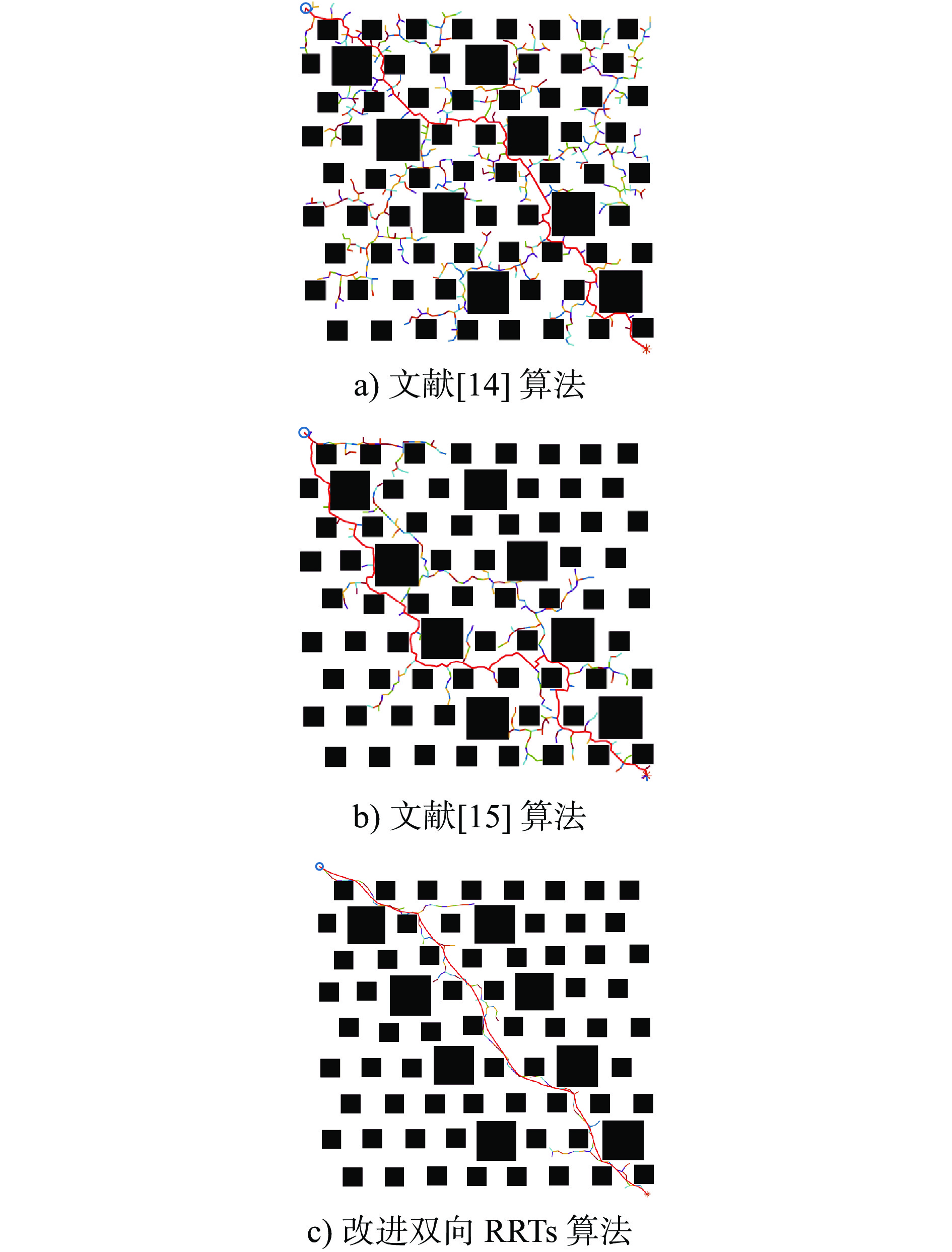
针对无人机复杂环境下的全局航迹规划问题,将人工势场法与双向RRTs(Rapidly-exploring random trees)算法结合,提出一种改进双向RRTs算法。首先,目标偏置策略引导采样点以一定概率顺着目标点生成,同时随机树新节点受到障碍物斥力和目标点引力的合力影响有效避开障碍物生长,提高航迹搜寻效率,其次对随机树的节点扩展考虑了无人机飞行性能约束条件,最后采用3阶贝塞尔函数进一步航迹优化。仿真结果表明:二维和三维复杂环境中改进双向RRTs算法相比传统RRT、双向RRTs算法航迹搜索耗时减少了71.3%、24.7%和41.0%、18.6%,验证了改进算法全局搜索能力的快速性和有效性,能很好的应用于无人机离线全局航迹规划场合。
针对无人机复杂环境下的全局航迹规划问题,将人工势场法与双向RRTs(Rapidly-exploring random trees)算法结合,提出一种改进双向RRTs算法。首先,目标偏置策略引导采样点以一定概率顺着目标点生成,同时随机树新节点受到障碍物斥力和目标点引力的合力影响有效避开障碍物生长,提高航迹搜寻效率,其次对随机树的节点扩展考虑了无人机飞行性能约束条件,最后采用3阶贝塞尔函数进一步航迹优化。仿真结果表明:二维和三维复杂环境中改进双向RRTs算法相比传统RRT、双向RRTs算法航迹搜索耗时减少了71.3%、24.7%和41.0%、18.6%,验证了改进算法全局搜索能力的快速性和有效性,能很好的应用于无人机离线全局航迹规划场合。

2024, 43(5): 904-910.
doi: 10.13433/j.cnki.1003-8728.20220261
摘要:
为了提高强冲击试验的试验弹测速有效性与精度,本文设计了高速摄像试验弹测速方案测量试验弹冲击前的速度。依据试验条件进行了关键设备选型并搭建了高速摄像测速系统,利用有限脉冲响应(Finite impulse response, FIR)滤波器并选取不同滤波器半长进行速度分析计算,通过“四点矫正法”解决了图像倾斜畸变。将测速结果与传统的激光测速结果进行比对,二者测试结果高度吻合(相对误差在0.5%以内)。最后由测速系统分析的3组连续出口速度证明了该强冲击试验系统具备提供稳定速度的能力。
为了提高强冲击试验的试验弹测速有效性与精度,本文设计了高速摄像试验弹测速方案测量试验弹冲击前的速度。依据试验条件进行了关键设备选型并搭建了高速摄像测速系统,利用有限脉冲响应(Finite impulse response, FIR)滤波器并选取不同滤波器半长进行速度分析计算,通过“四点矫正法”解决了图像倾斜畸变。将测速结果与传统的激光测速结果进行比对,二者测试结果高度吻合(相对误差在0.5%以内)。最后由测速系统分析的3组连续出口速度证明了该强冲击试验系统具备提供稳定速度的能力。

2024, 43(5): 911-916.
doi: 10.13433/j.cnki.1003-8728.20220281
摘要:
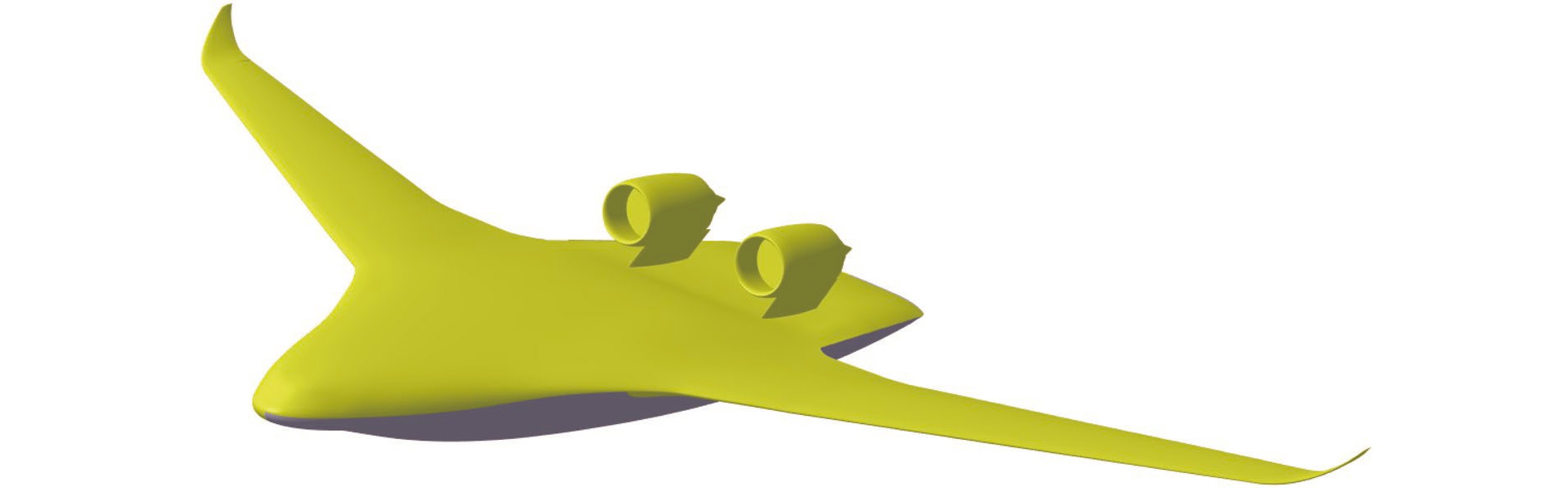
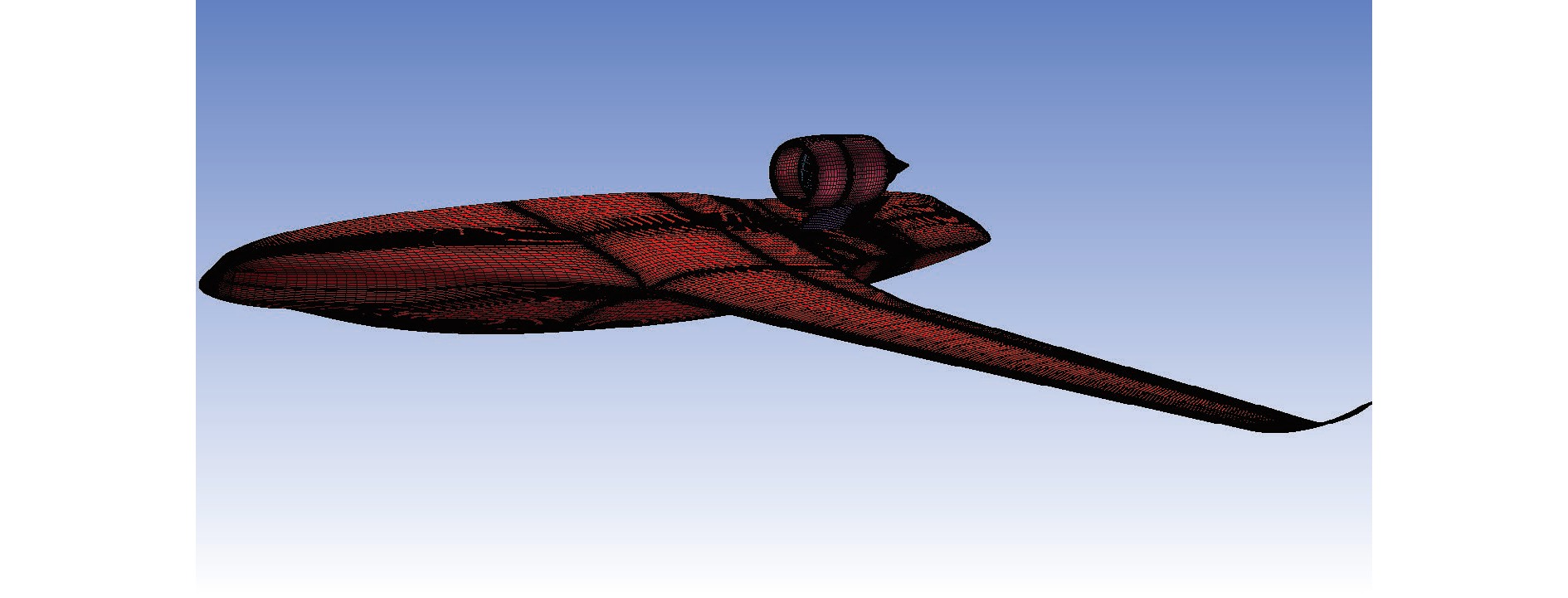
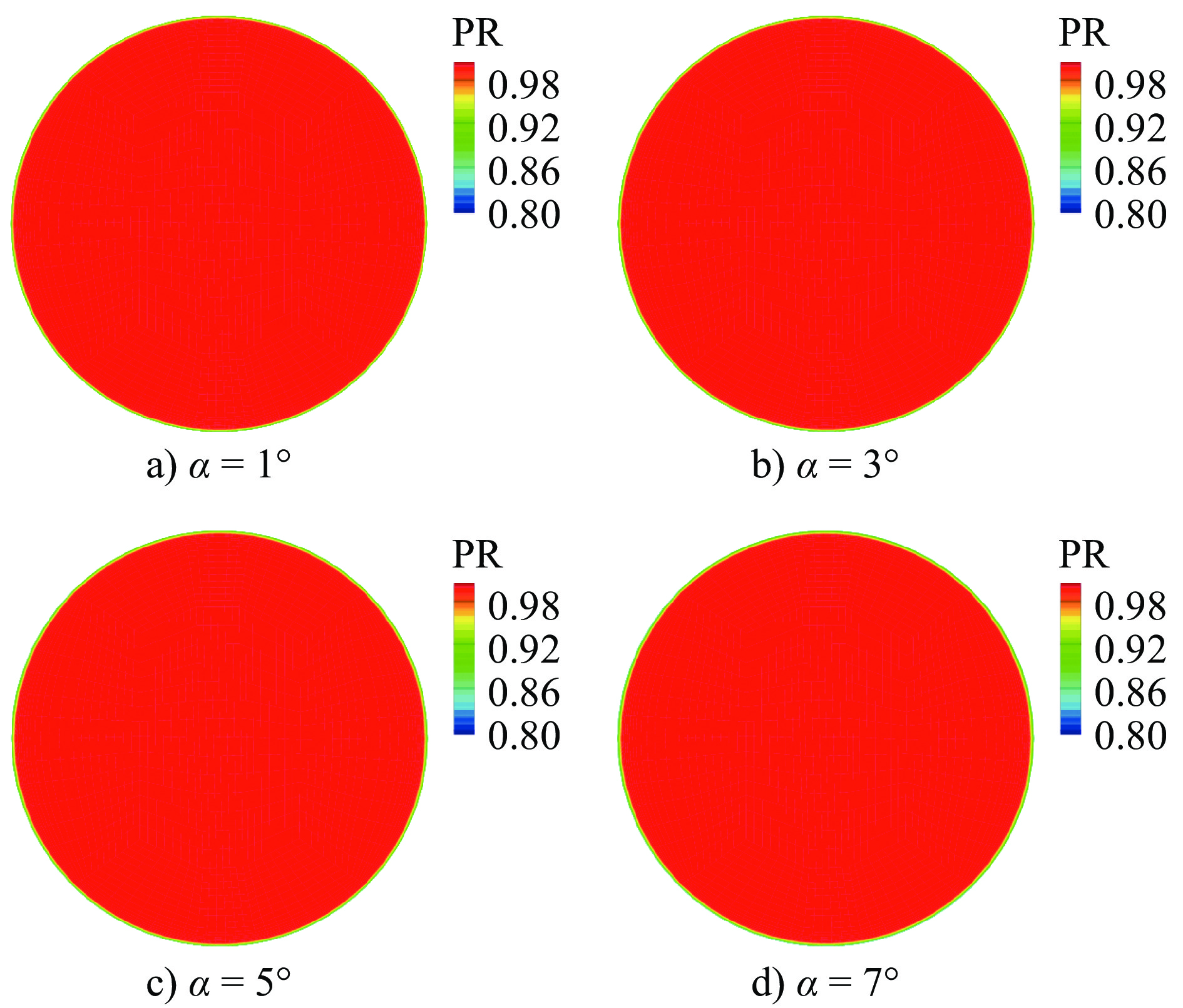
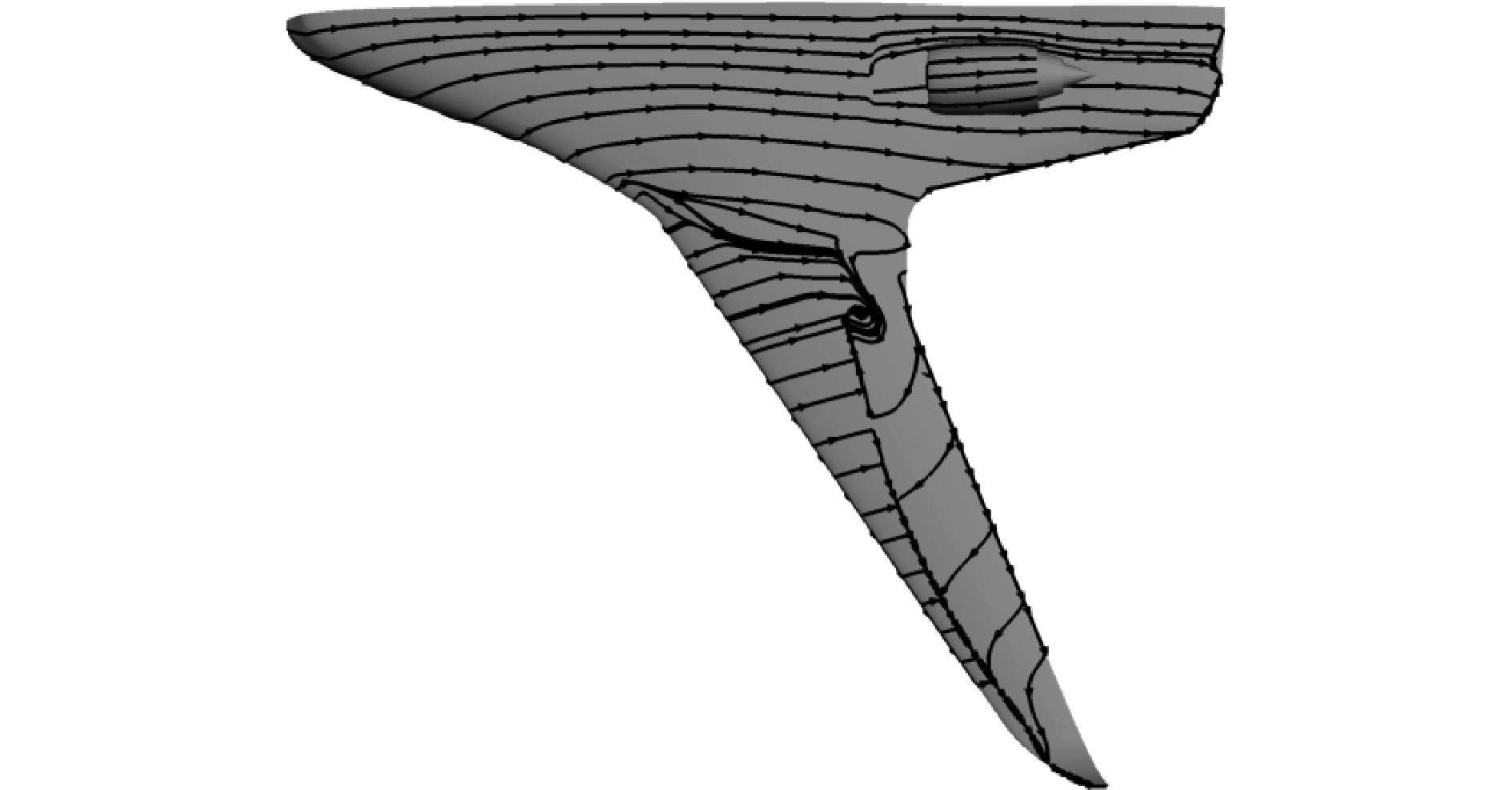
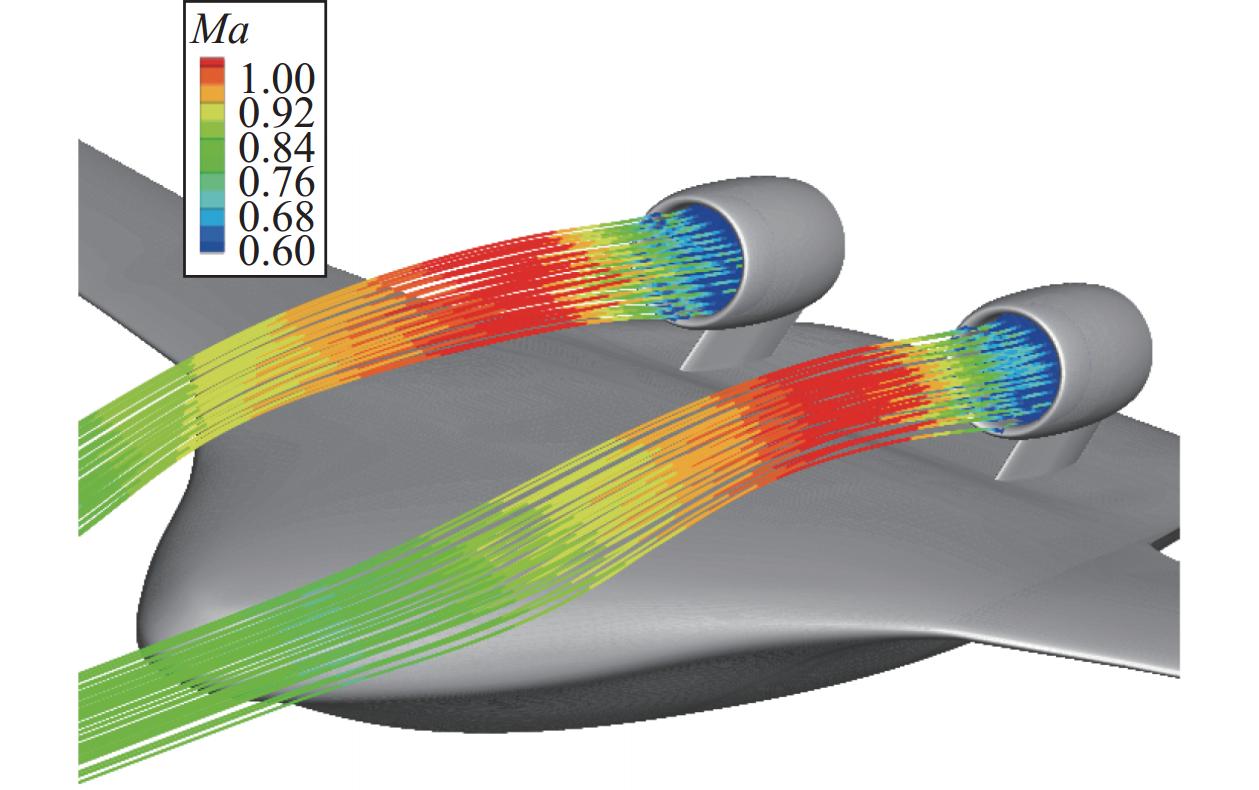
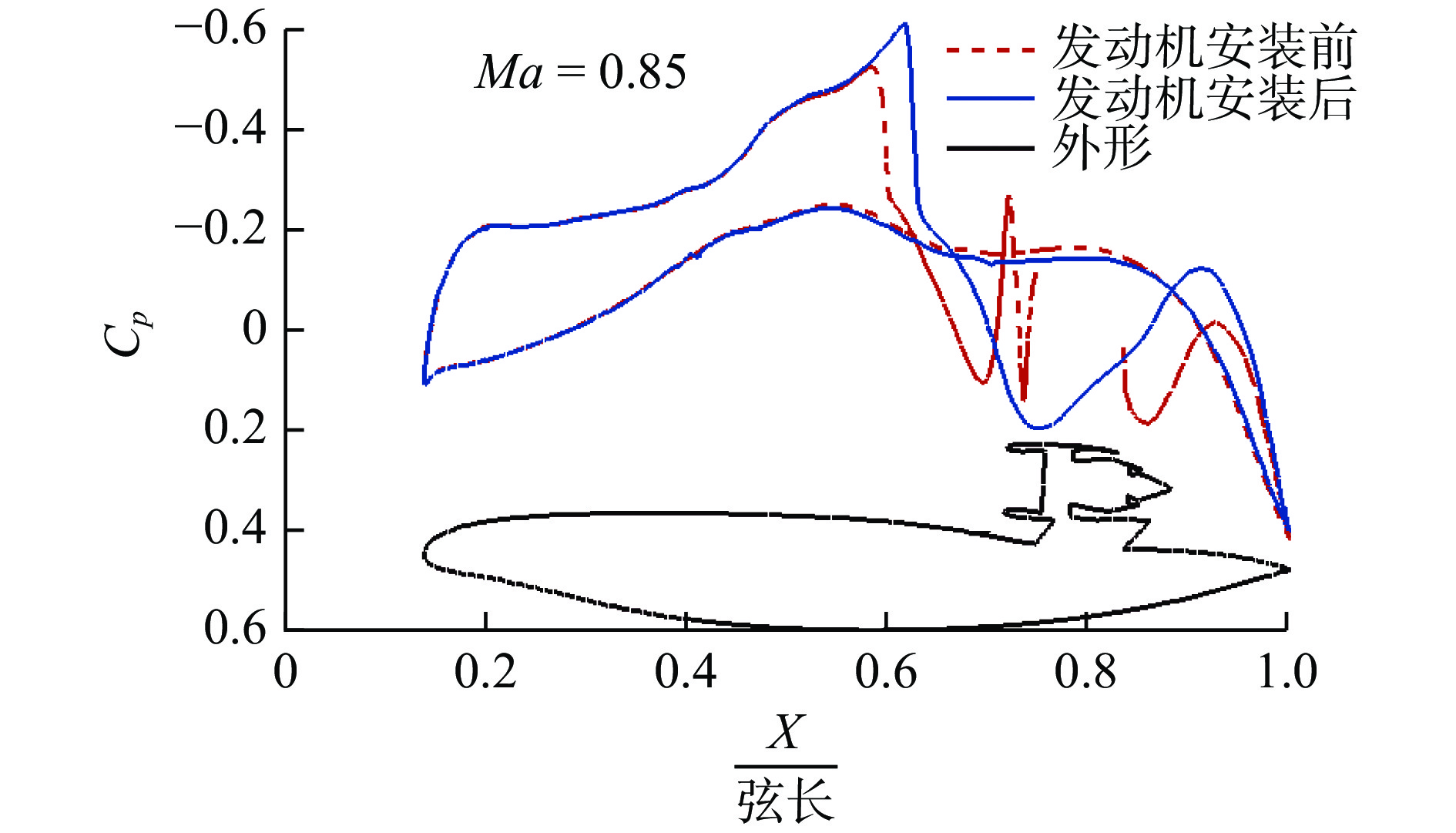
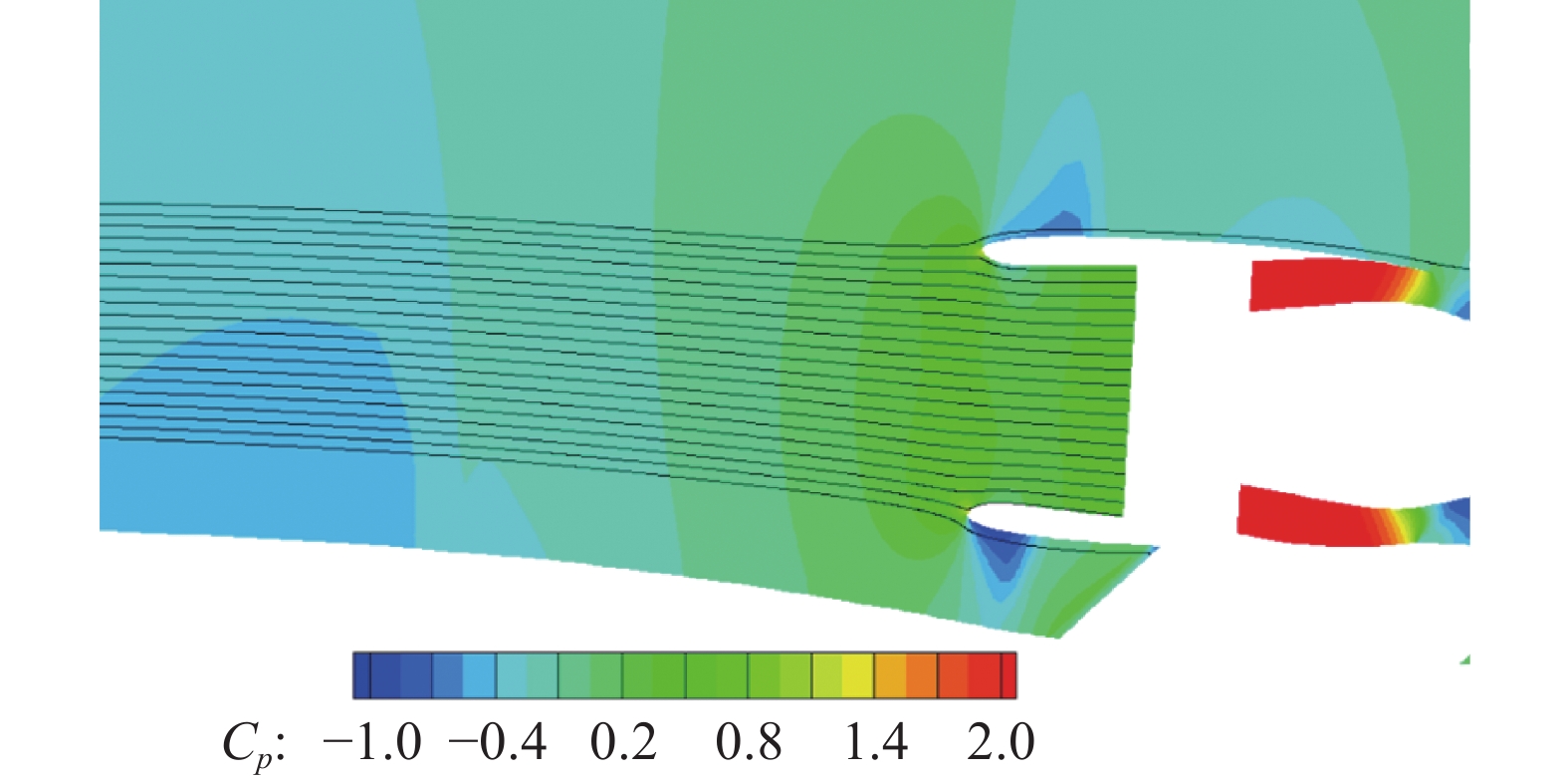
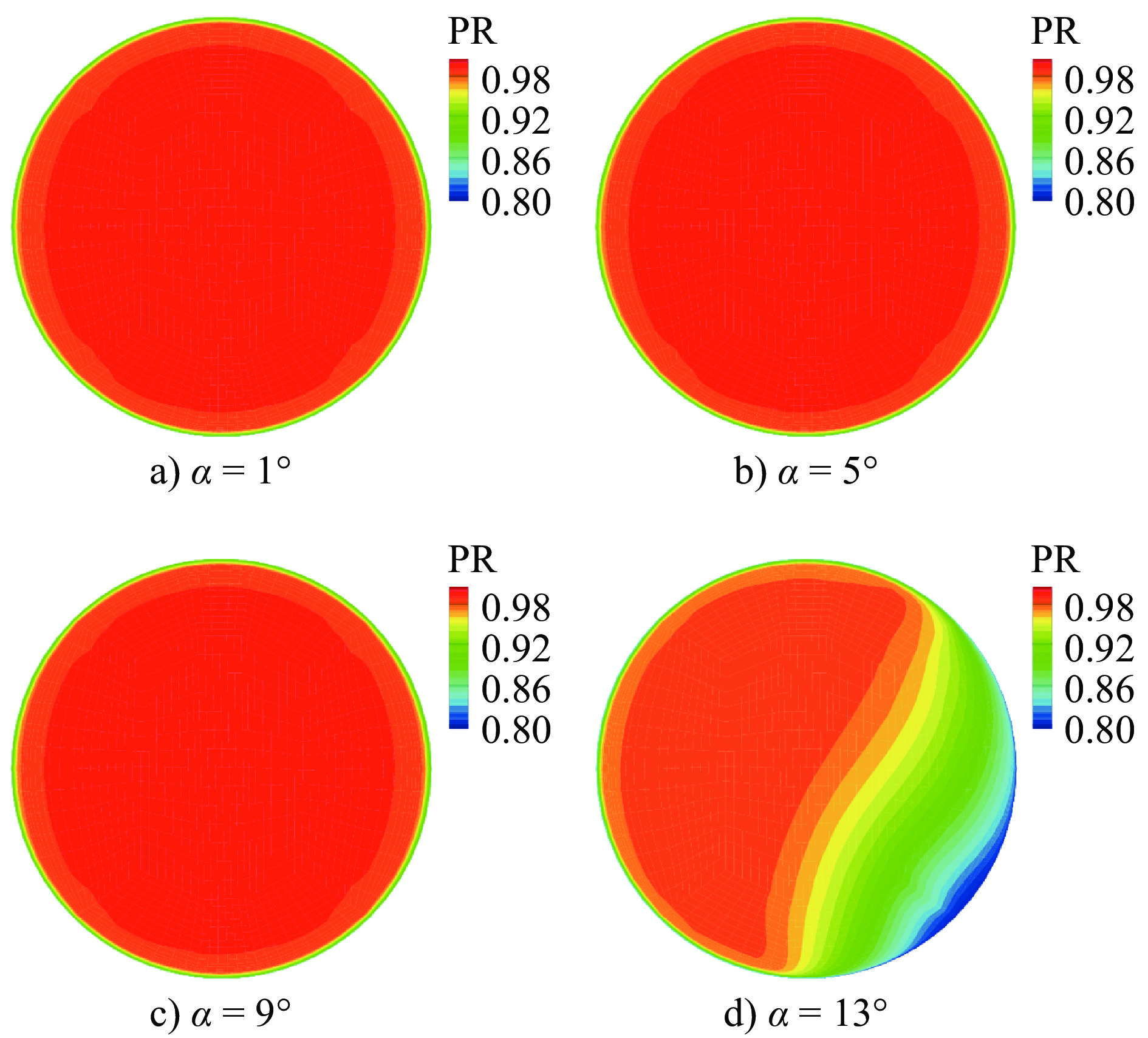
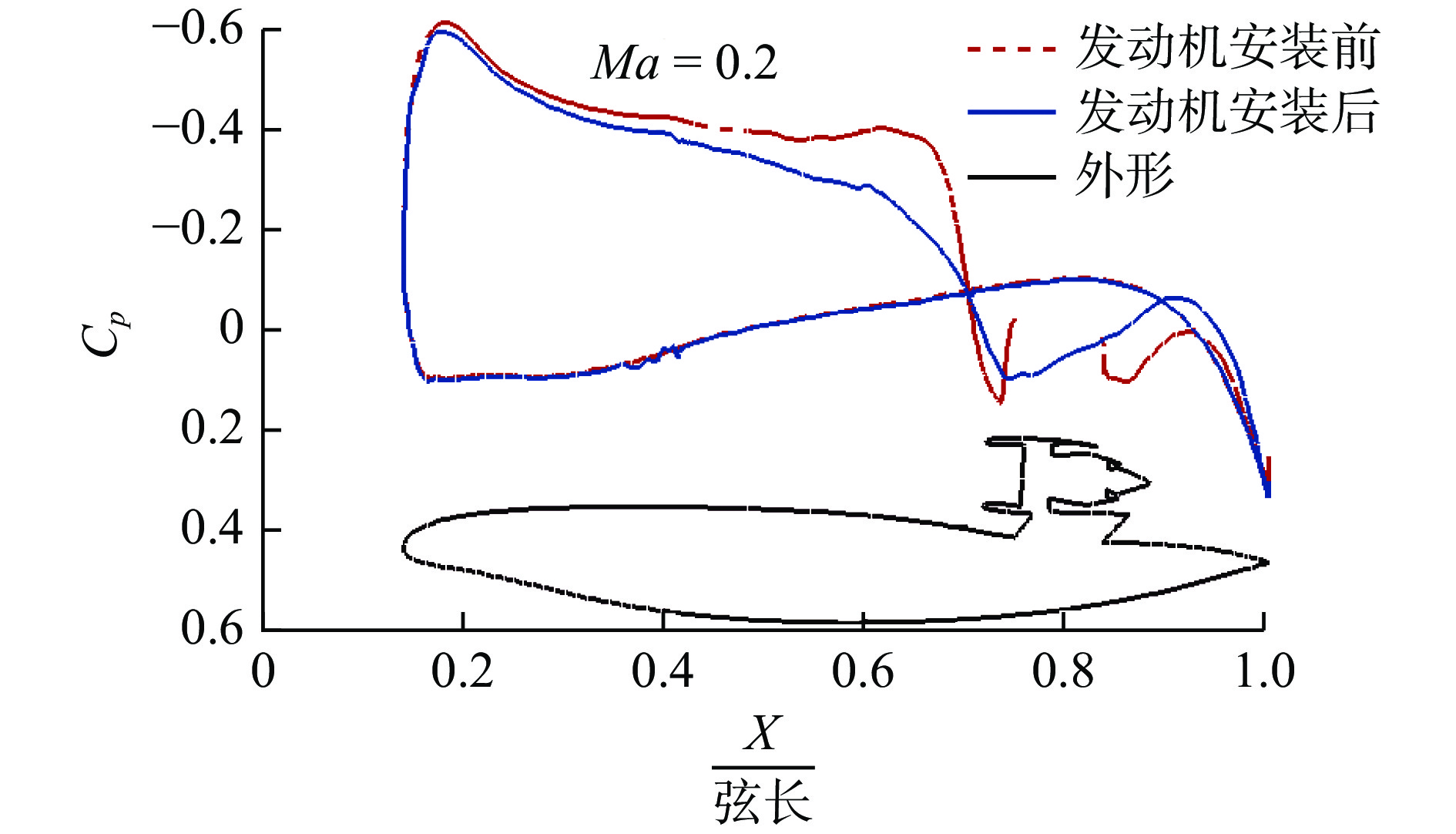
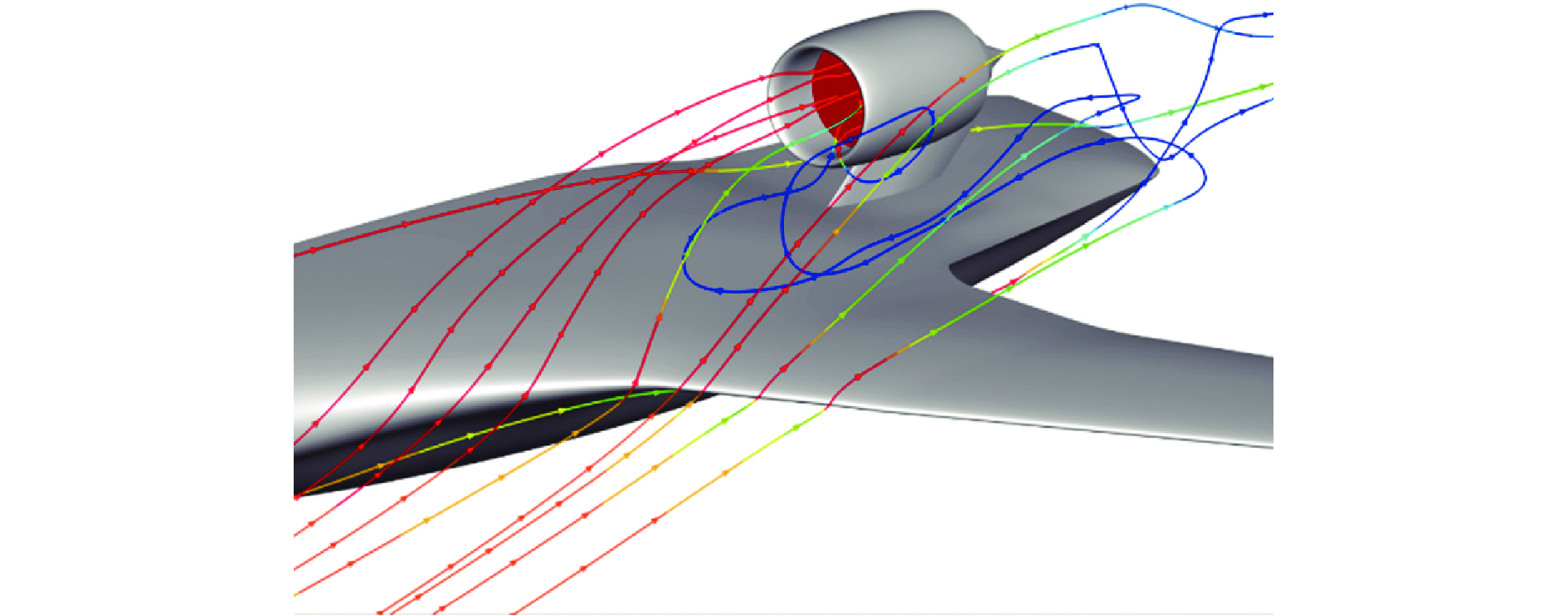
为评估发动机安装后,机体是否对发动机进气存在不利影响,本文通过数值模拟方法,研究了高低速情况下BWB300机体对发动机进气品质的影响。结果表明:高速情况下,发动机前高速气流能完全满足BWB300进气需求,故BWB300机体不会对发动机进气品质造成明显影响;而低速时,由于发动机进气流量需求大且其前方气流流速低,机体表面若存在流动分离,分离气流会较易被发动机吸入,从而降低其进气品质。故对类似BWB300的上置式发动机布局飞机而言,飞发一体化设计时应避免机体表面流动分离首先发生在发动机位置附近处。
为评估发动机安装后,机体是否对发动机进气存在不利影响,本文通过数值模拟方法,研究了高低速情况下BWB300机体对发动机进气品质的影响。结果表明:高速情况下,发动机前高速气流能完全满足BWB300进气需求,故BWB300机体不会对发动机进气品质造成明显影响;而低速时,由于发动机进气流量需求大且其前方气流流速低,机体表面若存在流动分离,分离气流会较易被发动机吸入,从而降低其进气品质。故对类似BWB300的上置式发动机布局飞机而言,飞发一体化设计时应避免机体表面流动分离首先发生在发动机位置附近处。