作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2024年 43卷 第4期
2024, 43(4): 553-558.
doi: 10.13433/j.cnki.1003-8728.20220263
 摘要
摘要 HTML
HTML PDF 1921KB
PDF 1921KB
摘要:
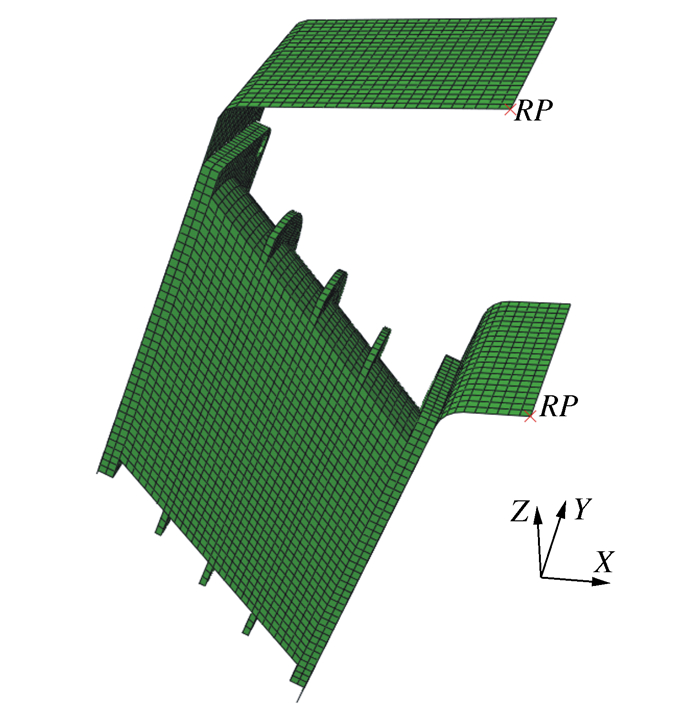
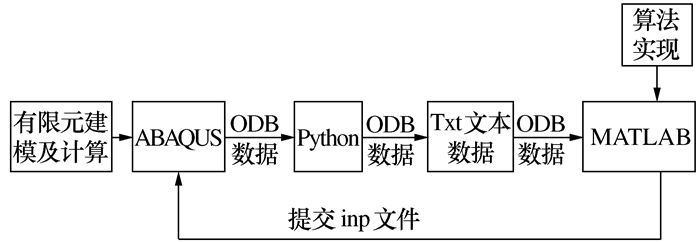
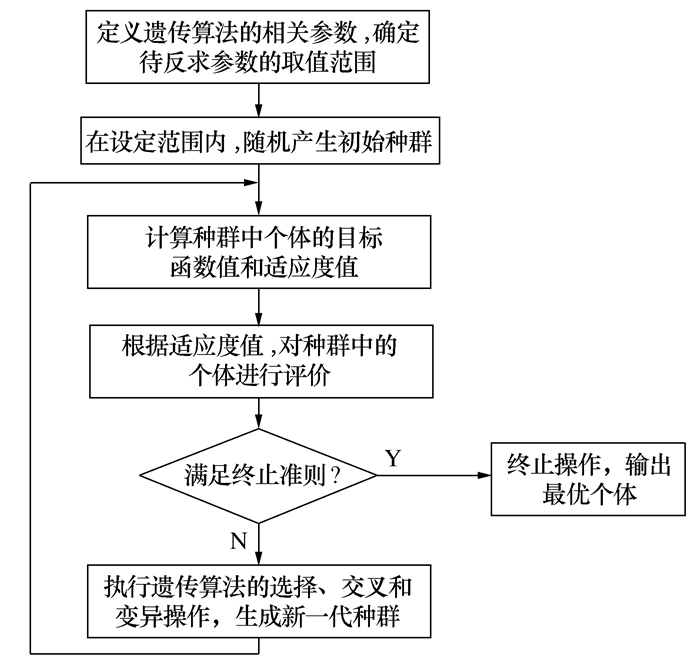
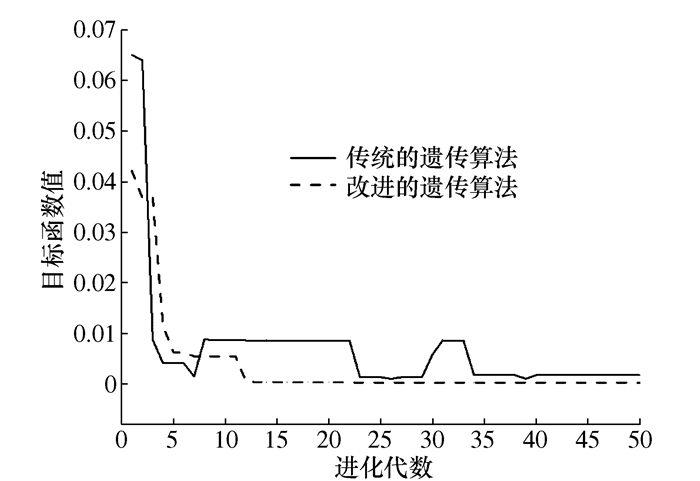
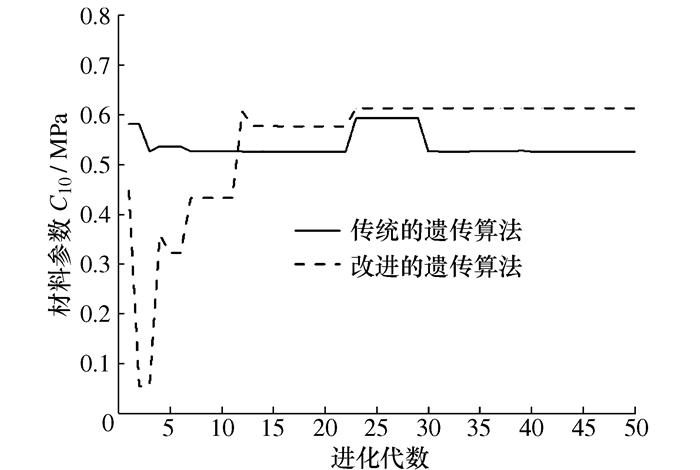
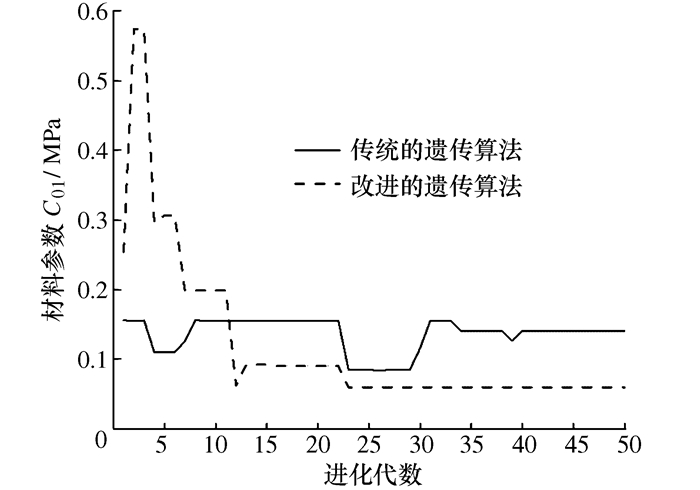
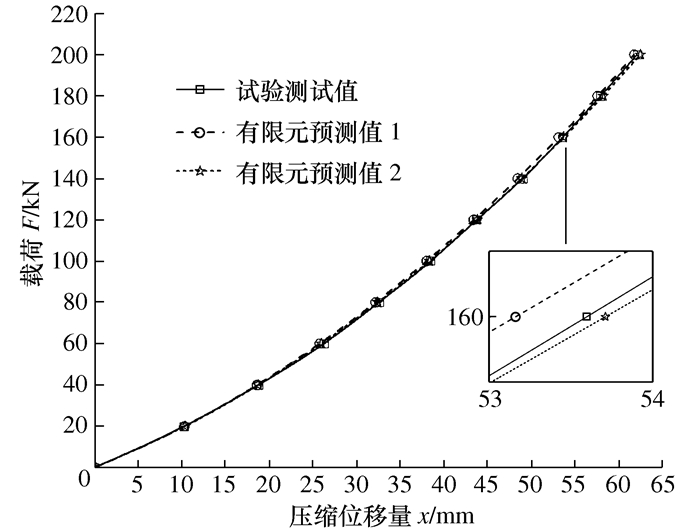
将优化算法与有限元仿真分析相结合可以对橡胶的材料参数进行反求, 该方法基于一款叠层橡胶弹簧的试验数据, 并选用Mooney-Rivlin超弹性本构模型。在参数反求的过程中, 为解决传统遗传算法出现的早熟、稳定性差以及收敛速度慢的问题, 将编码方式改为实数编码, 并在算法中引入精英保留策略和自适应的交叉与变异概率。将根据改进遗传算法反求得到的刚度特性曲线与试验结果进行对比, 发现二者具有很好的一致性, 表明通过反求得到的材料参数能准确地对橡胶材料的力学性能进行描述。
将优化算法与有限元仿真分析相结合可以对橡胶的材料参数进行反求, 该方法基于一款叠层橡胶弹簧的试验数据, 并选用Mooney-Rivlin超弹性本构模型。在参数反求的过程中, 为解决传统遗传算法出现的早熟、稳定性差以及收敛速度慢的问题, 将编码方式改为实数编码, 并在算法中引入精英保留策略和自适应的交叉与变异概率。将根据改进遗传算法反求得到的刚度特性曲线与试验结果进行对比, 发现二者具有很好的一致性, 表明通过反求得到的材料参数能准确地对橡胶材料的力学性能进行描述。
2024, 43(4): 559-565.
doi: 10.13433/j.cnki.1003-8728.20220244
摘要:
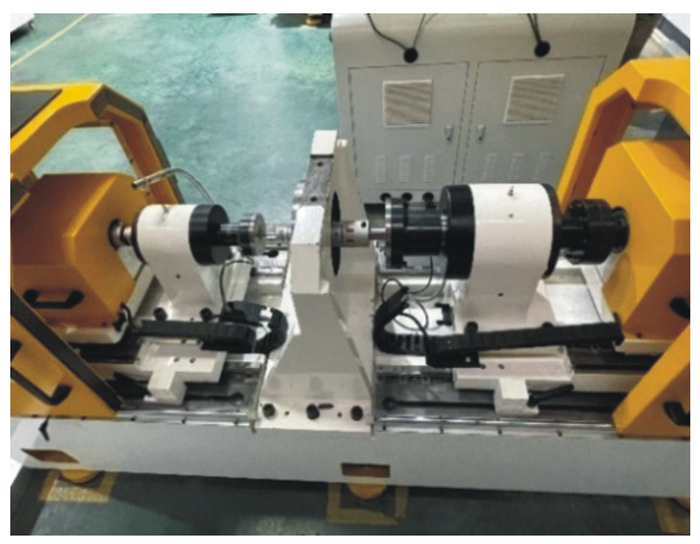
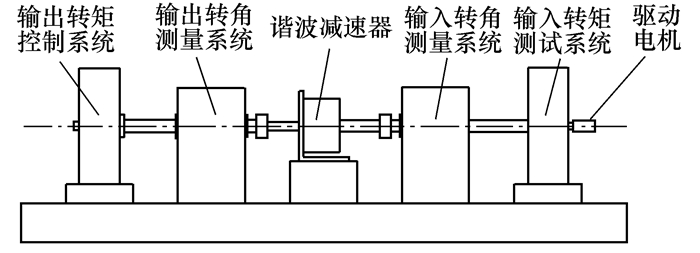
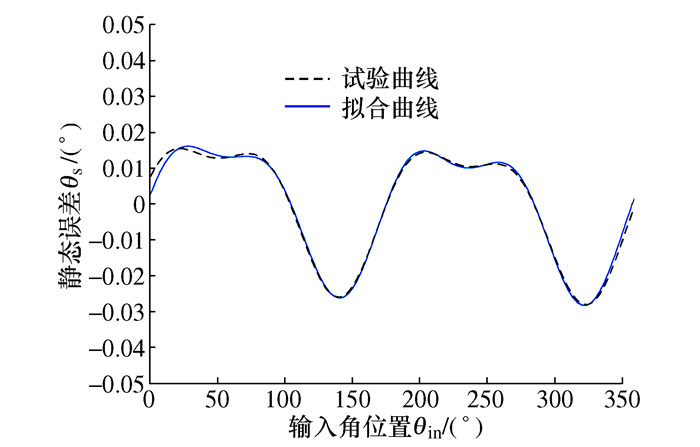
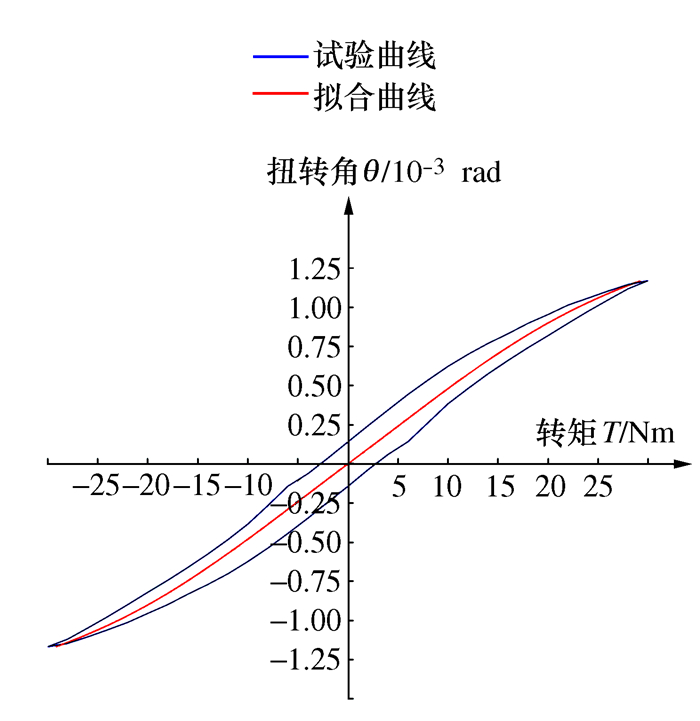
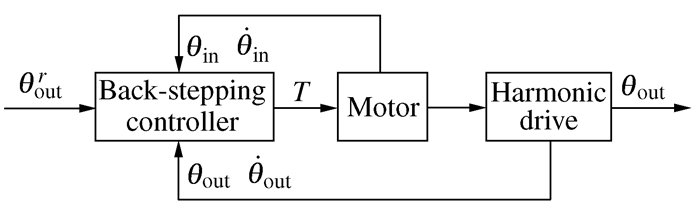
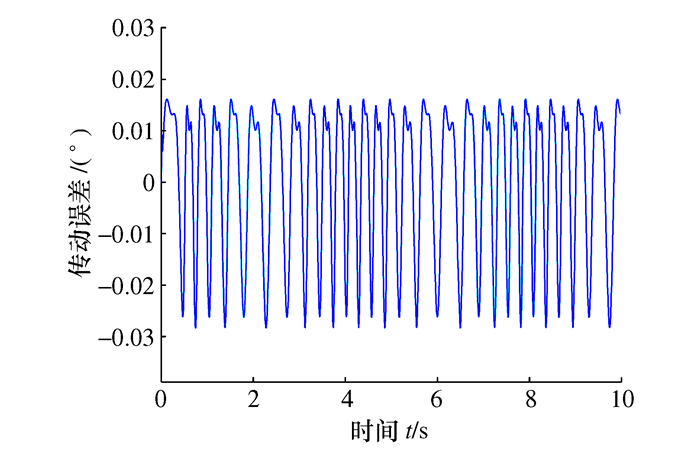
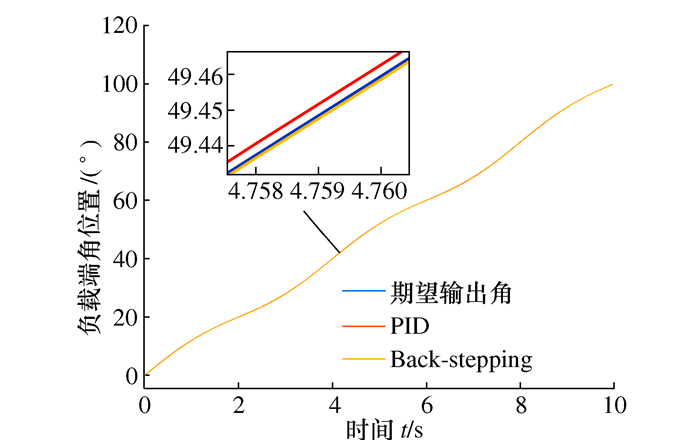
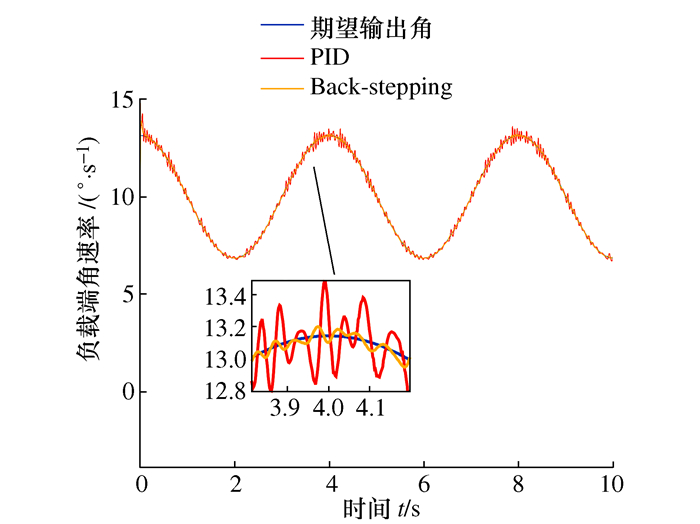
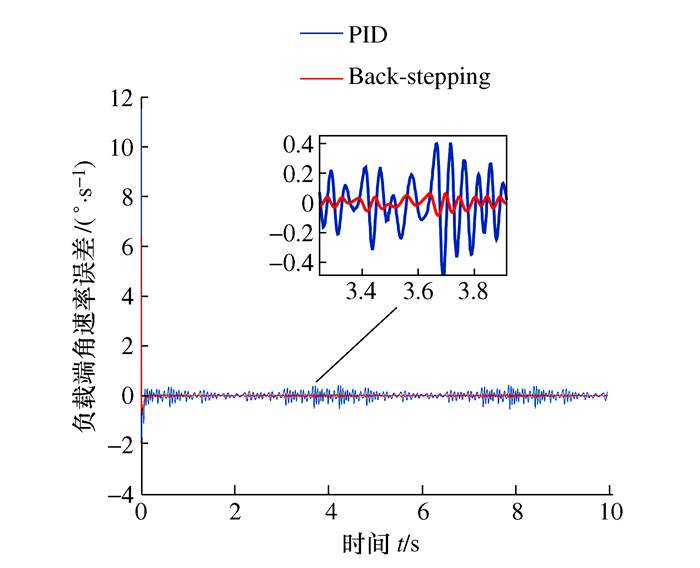
针对谐波传动系统动力学模型中存在的柔性变形、摩擦和运动误差等非线性因素。为了提高系统的传动精度, 针对系统非线性刚度和静态误差因素进行了建模, 并提出了一种Back-stepping滑模控制方法。利用Lyapunov稳定性理论, 证明了闭环系统的误差是一致有界的。仿真结果表明, 与PID控制相比, 采用Back-stepping滑模控制, 系统传动误差曲线峰峰值减小66.63%;负载端角速率误差曲线峰峰值减小77.35%。Back-stepping滑模控制能有效地补偿系统传动误差, 抑制其负载端的速度波动, 提高了系统的传动精度。
针对谐波传动系统动力学模型中存在的柔性变形、摩擦和运动误差等非线性因素。为了提高系统的传动精度, 针对系统非线性刚度和静态误差因素进行了建模, 并提出了一种Back-stepping滑模控制方法。利用Lyapunov稳定性理论, 证明了闭环系统的误差是一致有界的。仿真结果表明, 与PID控制相比, 采用Back-stepping滑模控制, 系统传动误差曲线峰峰值减小66.63%;负载端角速率误差曲线峰峰值减小77.35%。Back-stepping滑模控制能有效地补偿系统传动误差, 抑制其负载端的速度波动, 提高了系统的传动精度。

2024, 43(4): 566-572.
doi: 10.13433/j.cnki.1003-8728.20220287
摘要:
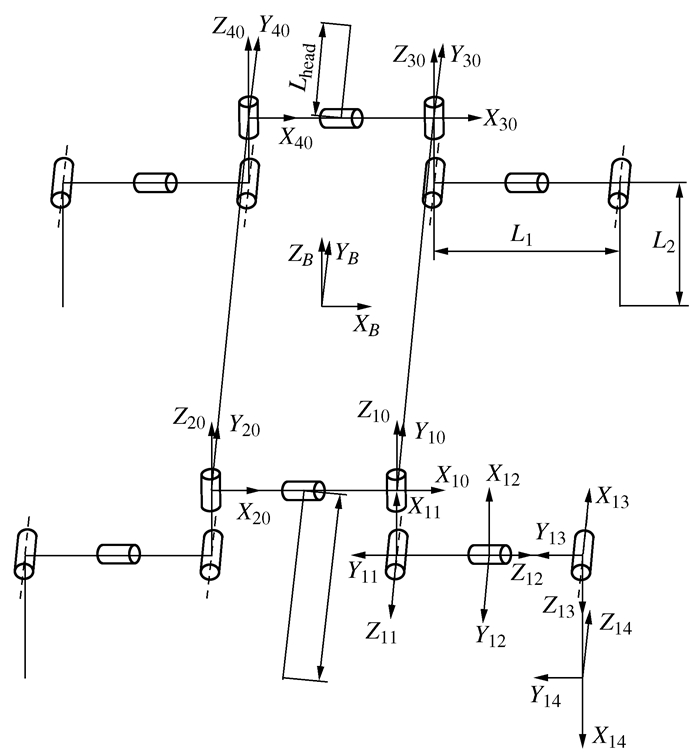
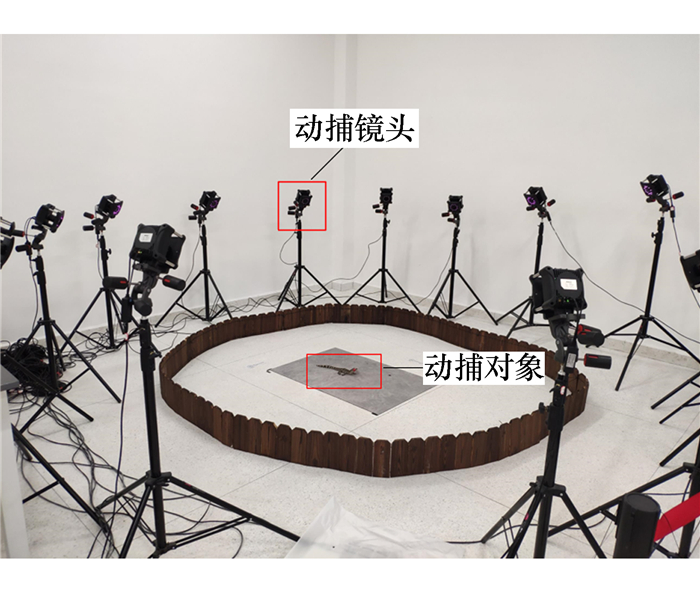
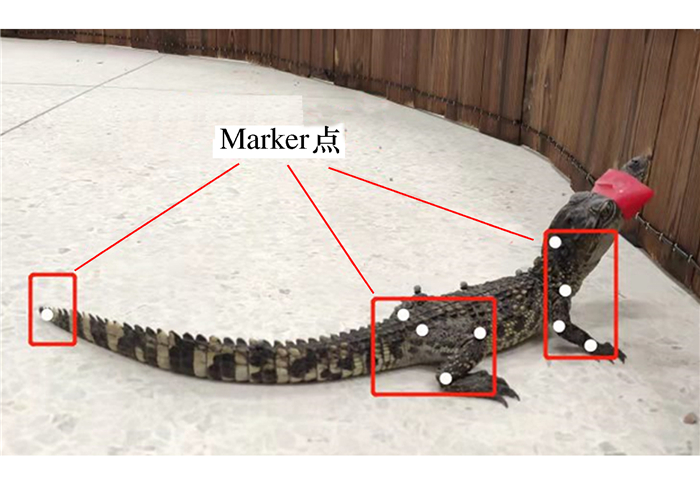
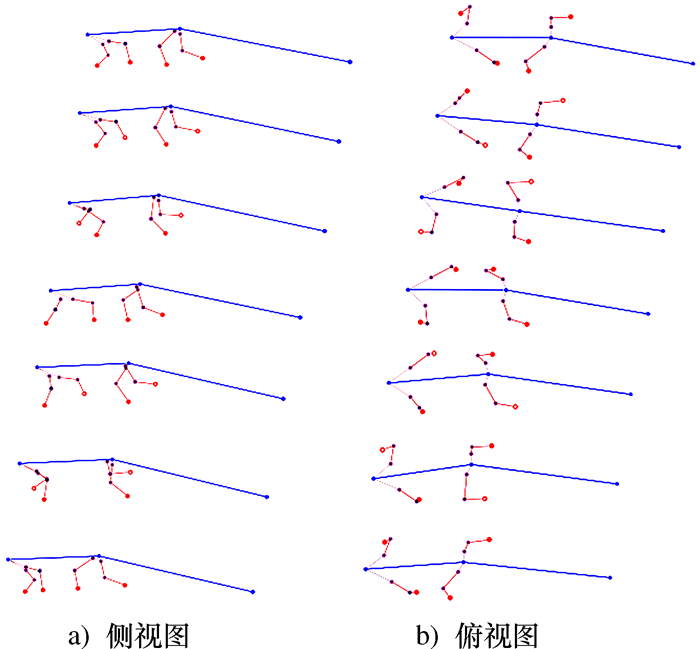
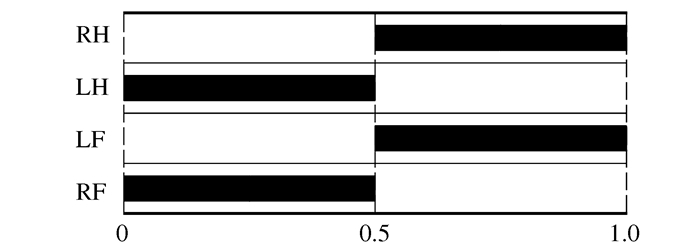
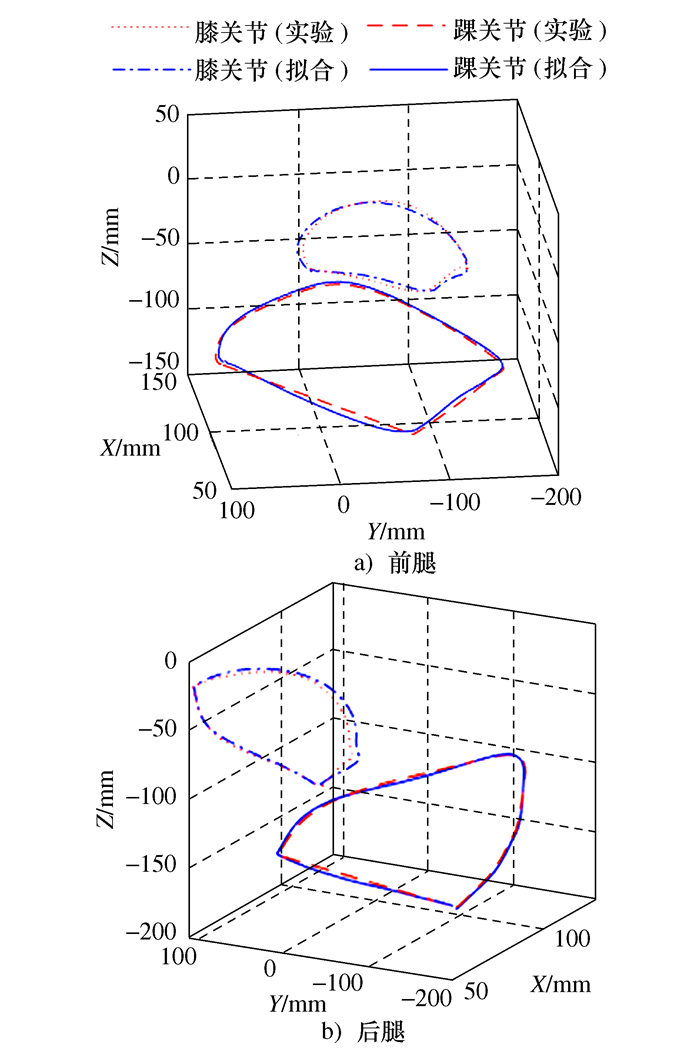
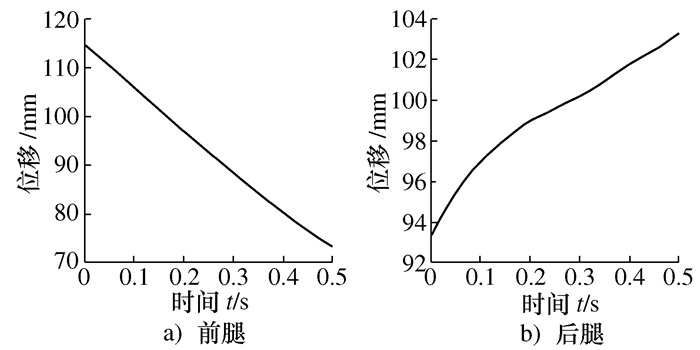
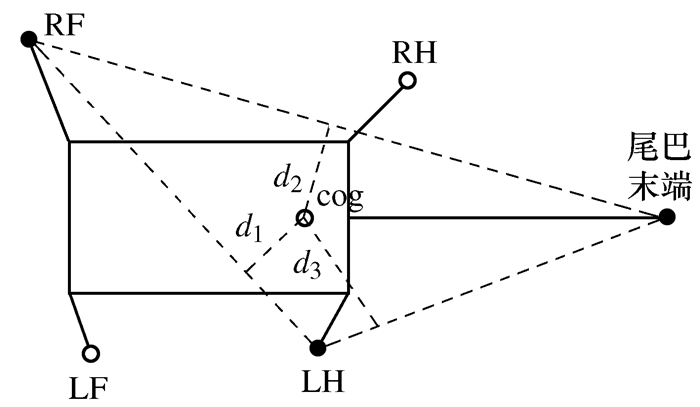
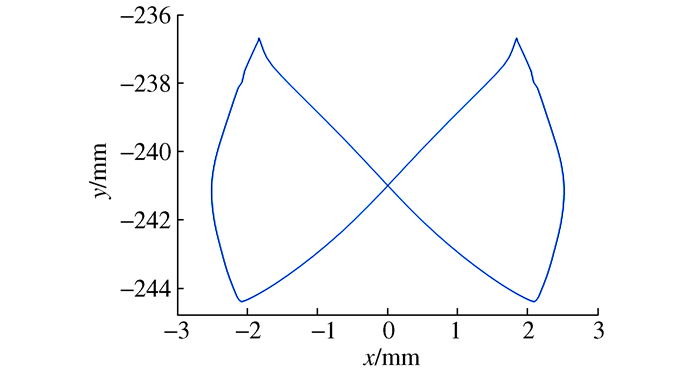
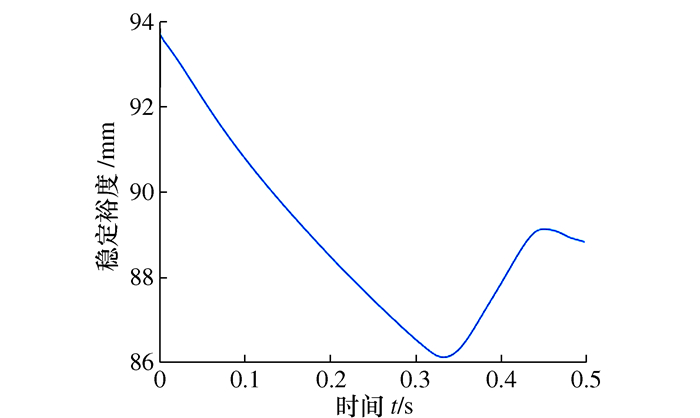
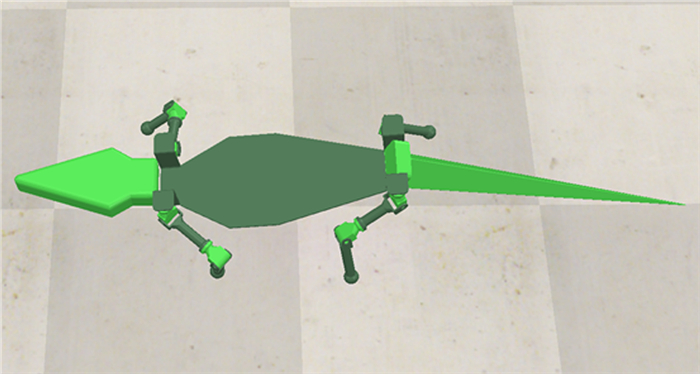
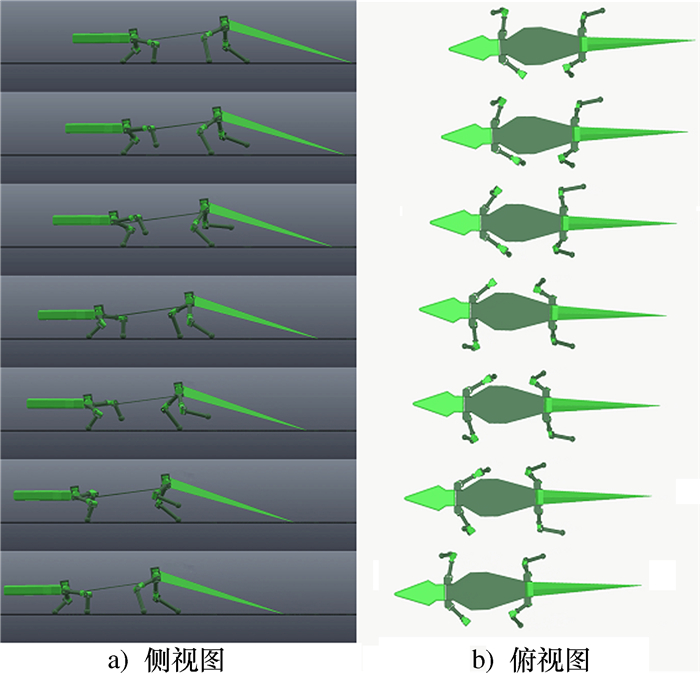
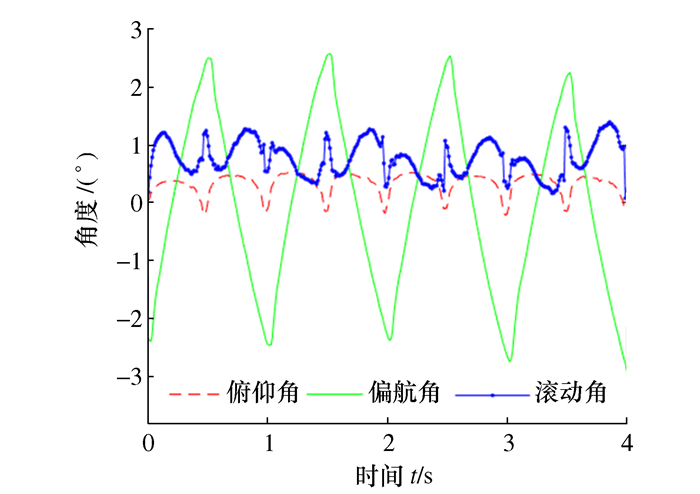
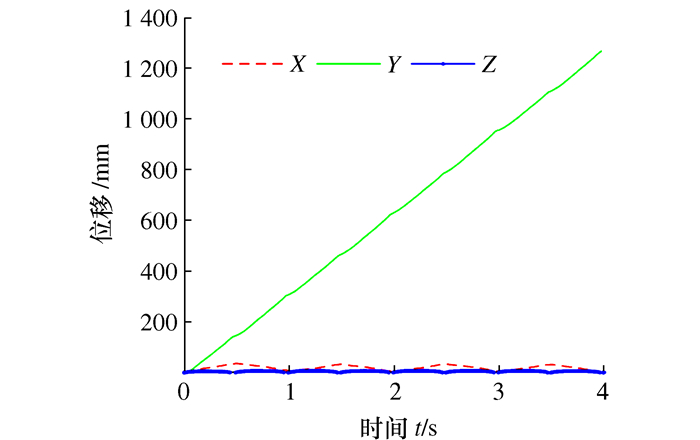
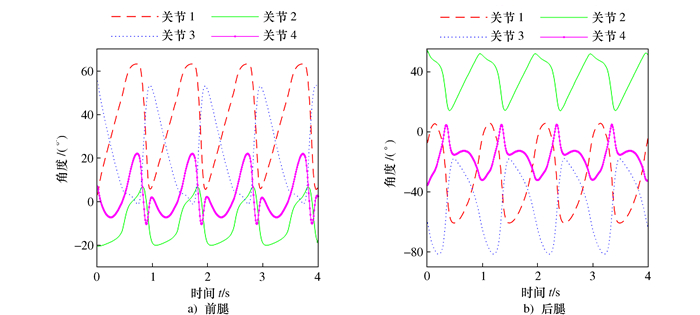
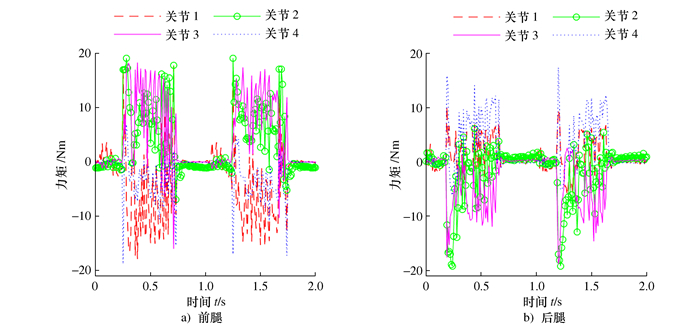
模仿真实动物的运动步态是仿生机器人步态规划研究的一个重点。针对一种新型仿生机器鳄鱼的步态规划问题, 采用动作捕捉技术获取了真实鳄鱼的运动步态。在此基础上, 利用高斯牛顿法求解出机器鳄鱼的腿部关节角度, 拟合得到与真实步态轨迹相似性较好的仿生步态, 并分析了机器鳄鱼在该步态下的运动稳定性。虚拟样机的运动仿真实验结果表明: 机器鳄鱼能用与真实鳄鱼相似的步态, 以0.3 m/s的速度向前爬行, 且具备较高的稳定性。
模仿真实动物的运动步态是仿生机器人步态规划研究的一个重点。针对一种新型仿生机器鳄鱼的步态规划问题, 采用动作捕捉技术获取了真实鳄鱼的运动步态。在此基础上, 利用高斯牛顿法求解出机器鳄鱼的腿部关节角度, 拟合得到与真实步态轨迹相似性较好的仿生步态, 并分析了机器鳄鱼在该步态下的运动稳定性。虚拟样机的运动仿真实验结果表明: 机器鳄鱼能用与真实鳄鱼相似的步态, 以0.3 m/s的速度向前爬行, 且具备较高的稳定性。
2024, 43(4): 573-581.
doi: 10.13433/j.cnki.1003-8728.20220288
摘要:
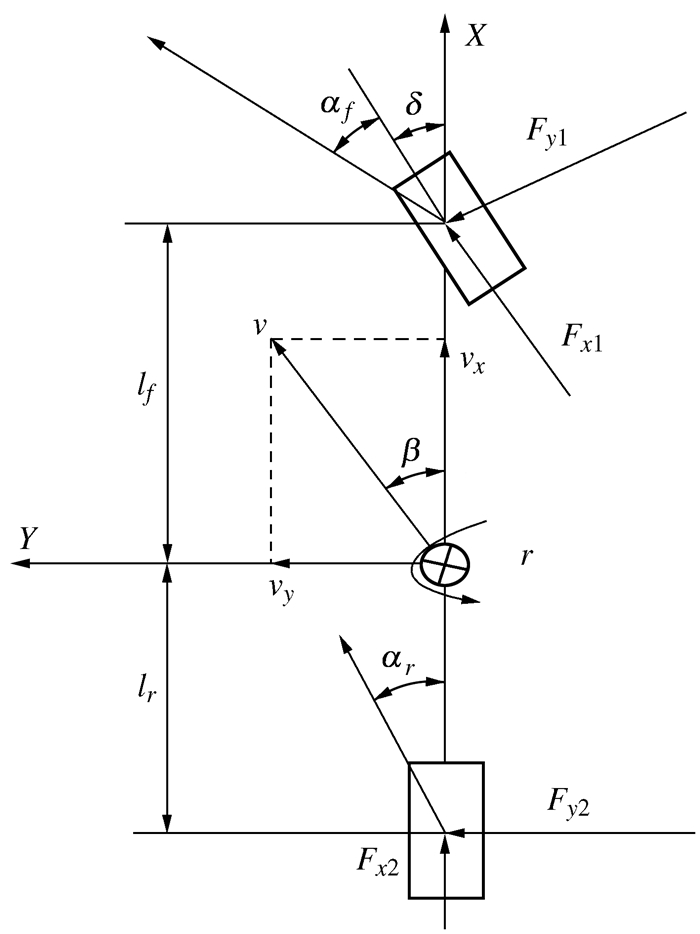
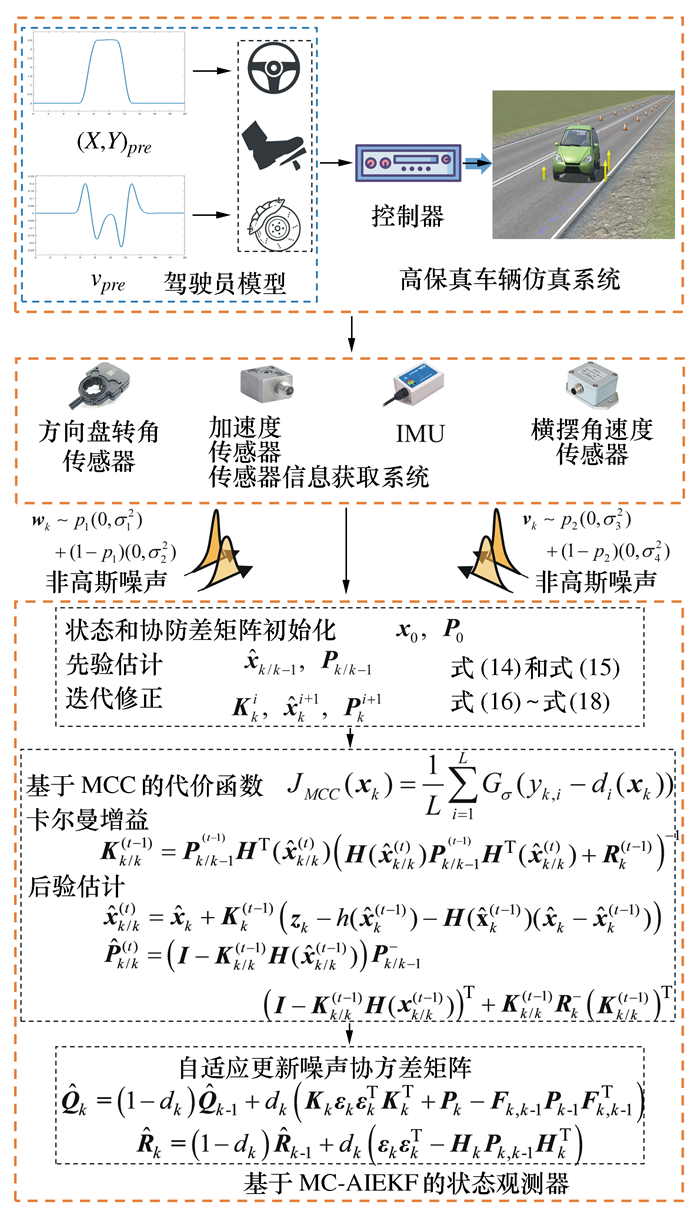
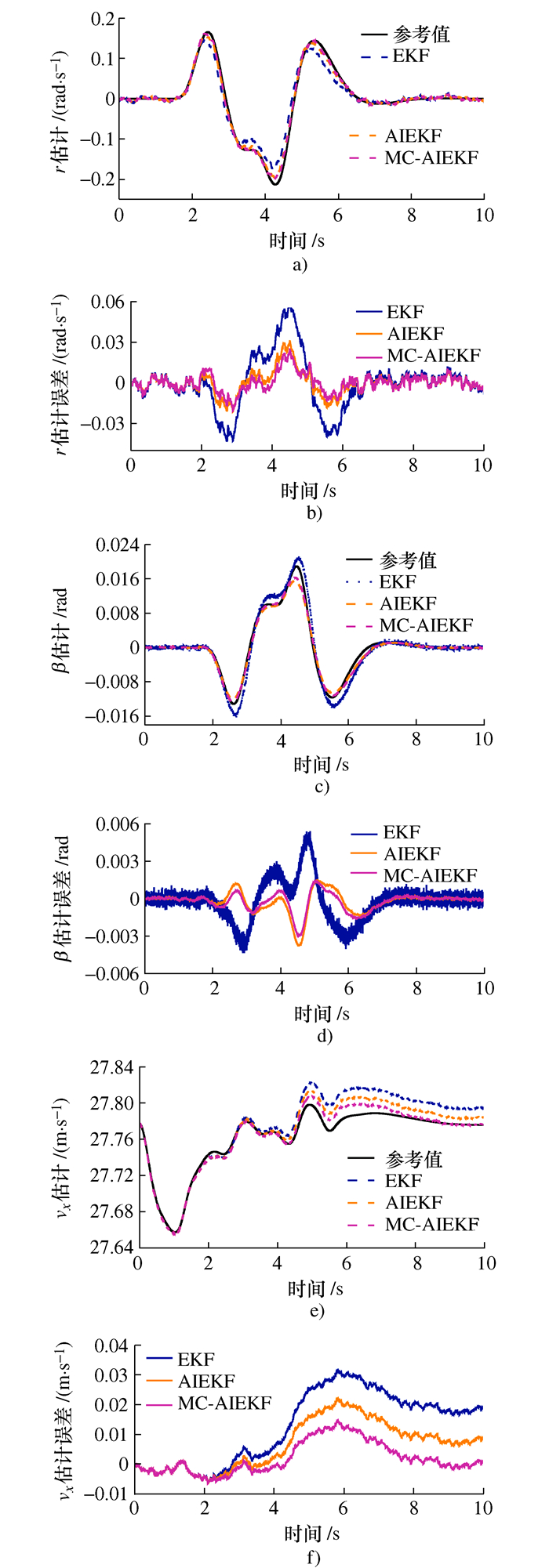
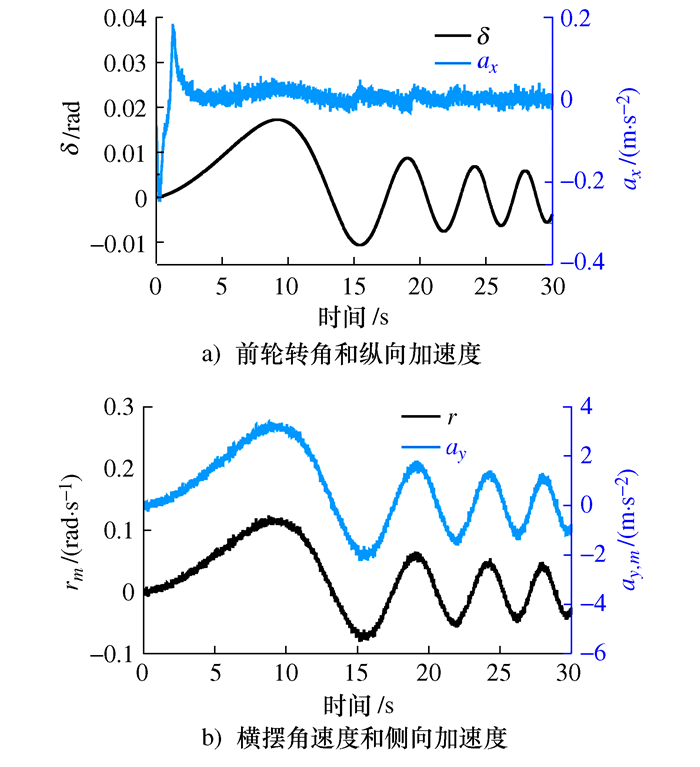
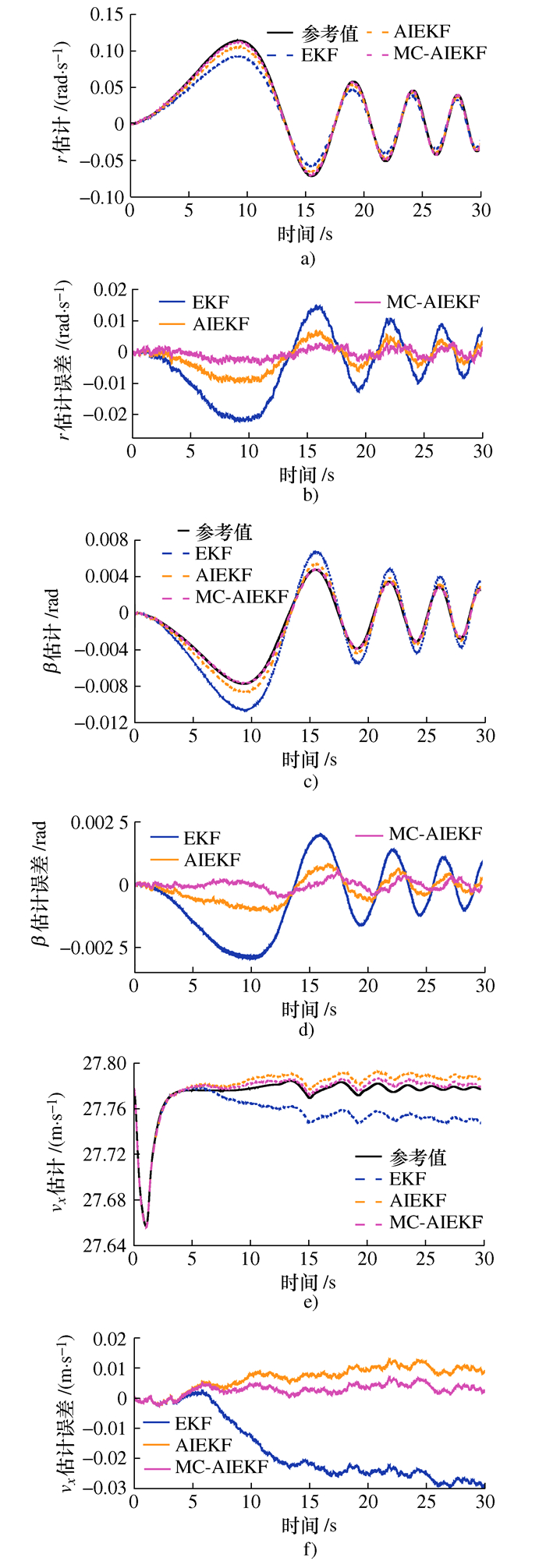
针对传统卡尔曼滤波在非高斯环境下对车辆状态估计鲁棒性和精度差的问题, 提出最大相关熵准则(MCC)下改进自适应迭代扩展卡尔曼(AIEKF)滤波算法(MC-AIEKF), 建立横-纵耦合的三自由度车辆模型, 利用易测得的车载传感器信息设计了包含横摆角速度、质心侧偏角、纵向车速的状态观测器。在双移线和正弦扫频输入工况下通过Simulink/CarSim仿真试验平台对提出的算法进行了验证。结果表明, 在非高斯环境下, 相比于扩展卡尔曼滤波(EKF)和AIEKF, MC-AIEKF算法估计精度高, 鲁棒性好, 在实际的车辆状态估计中MC-AIEKF具有更强的适用性。
针对传统卡尔曼滤波在非高斯环境下对车辆状态估计鲁棒性和精度差的问题, 提出最大相关熵准则(MCC)下改进自适应迭代扩展卡尔曼(AIEKF)滤波算法(MC-AIEKF), 建立横-纵耦合的三自由度车辆模型, 利用易测得的车载传感器信息设计了包含横摆角速度、质心侧偏角、纵向车速的状态观测器。在双移线和正弦扫频输入工况下通过Simulink/CarSim仿真试验平台对提出的算法进行了验证。结果表明, 在非高斯环境下, 相比于扩展卡尔曼滤波(EKF)和AIEKF, MC-AIEKF算法估计精度高, 鲁棒性好, 在实际的车辆状态估计中MC-AIEKF具有更强的适用性。

2024, 43(4): 582-590.
doi: 10.13433/j.cnki.1003-8728.20240047
摘要:
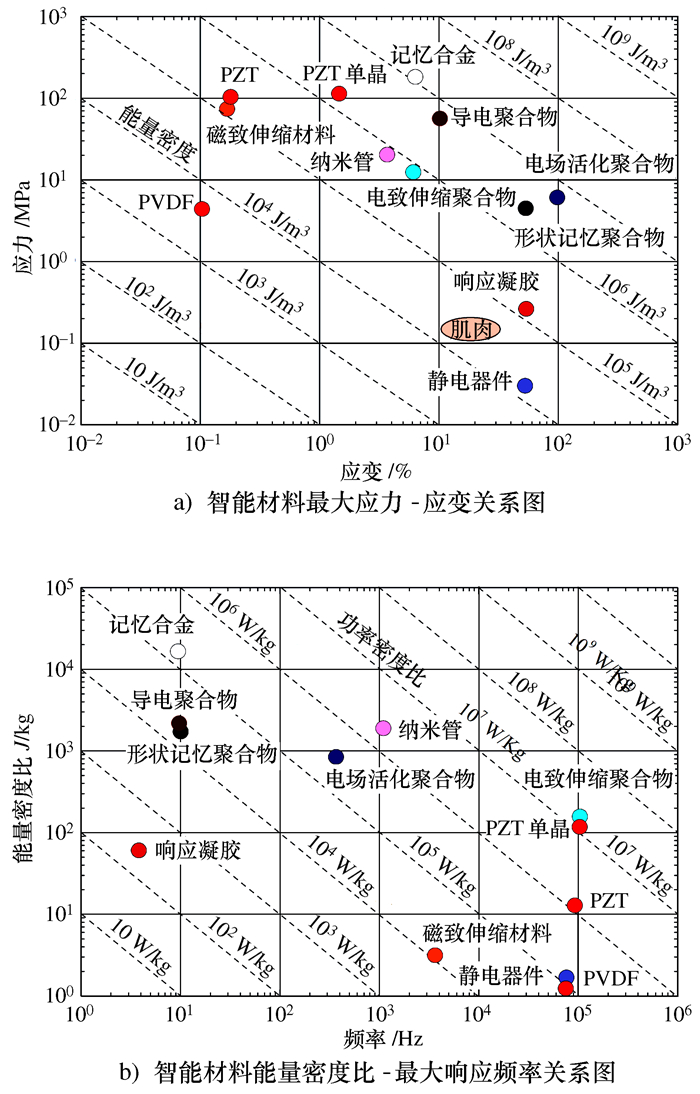
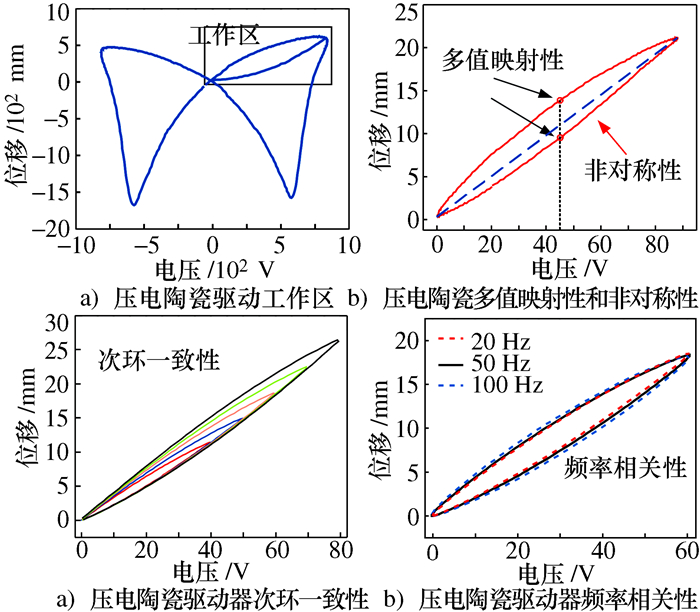
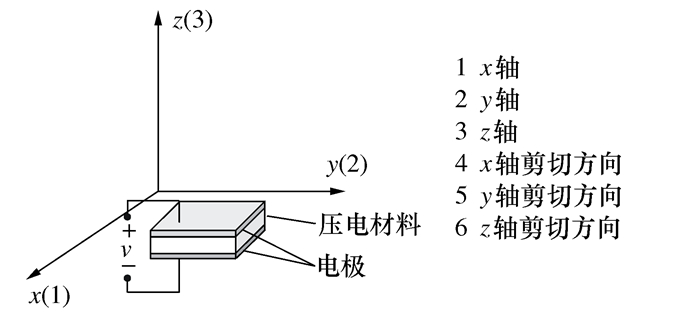
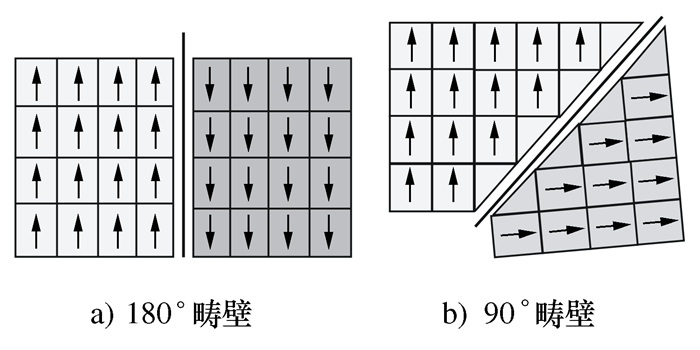
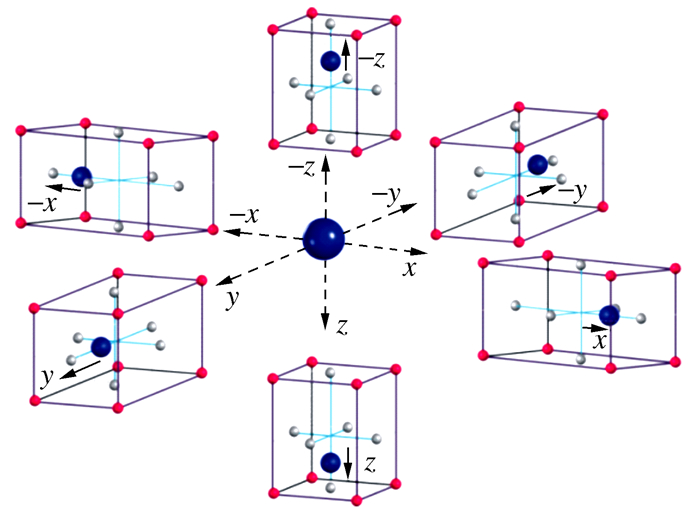
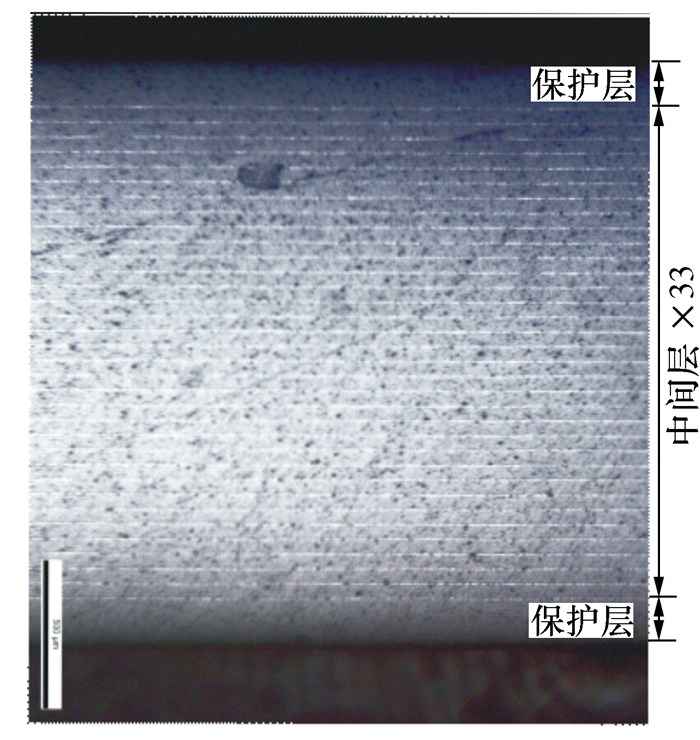
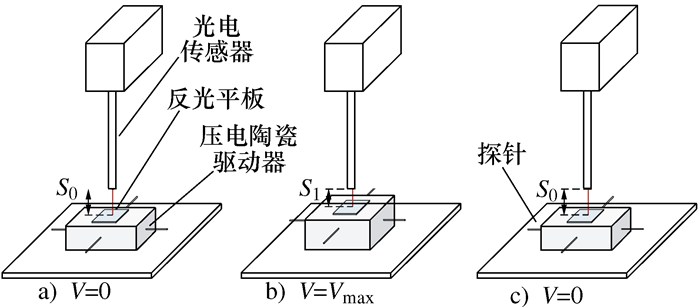
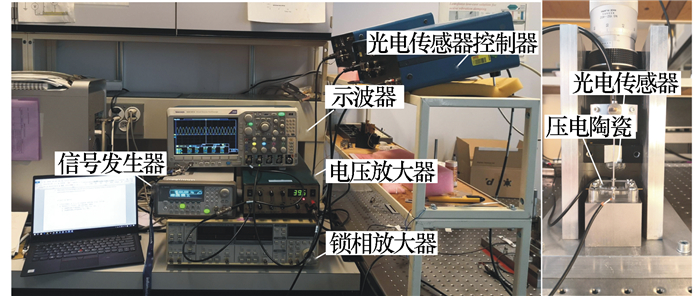
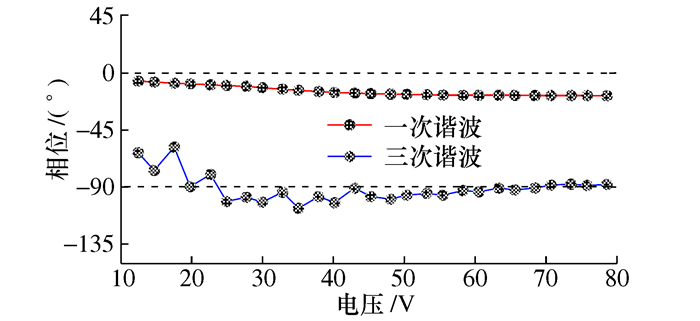
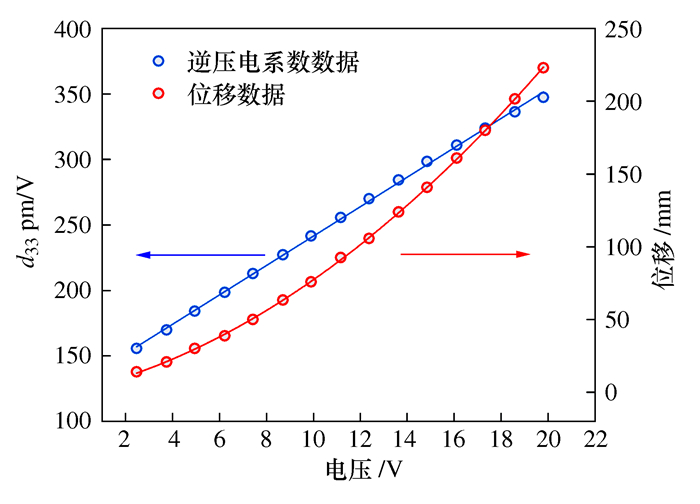
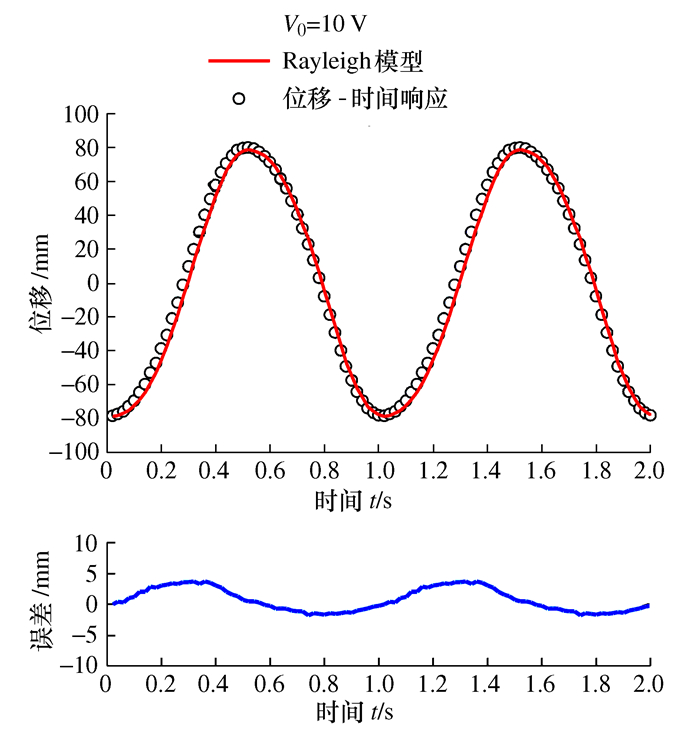
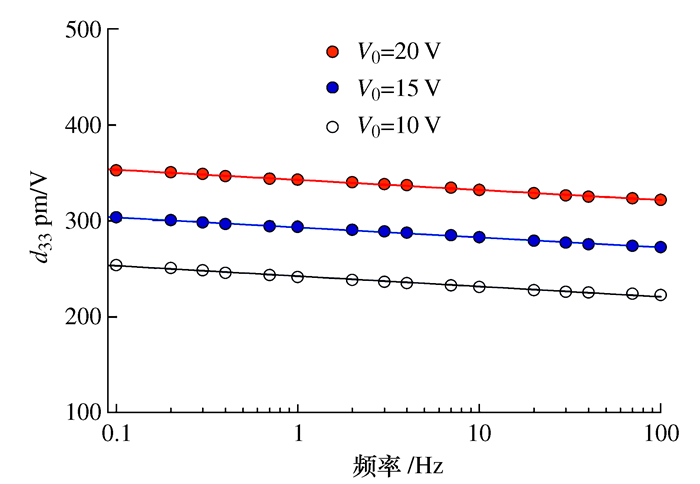
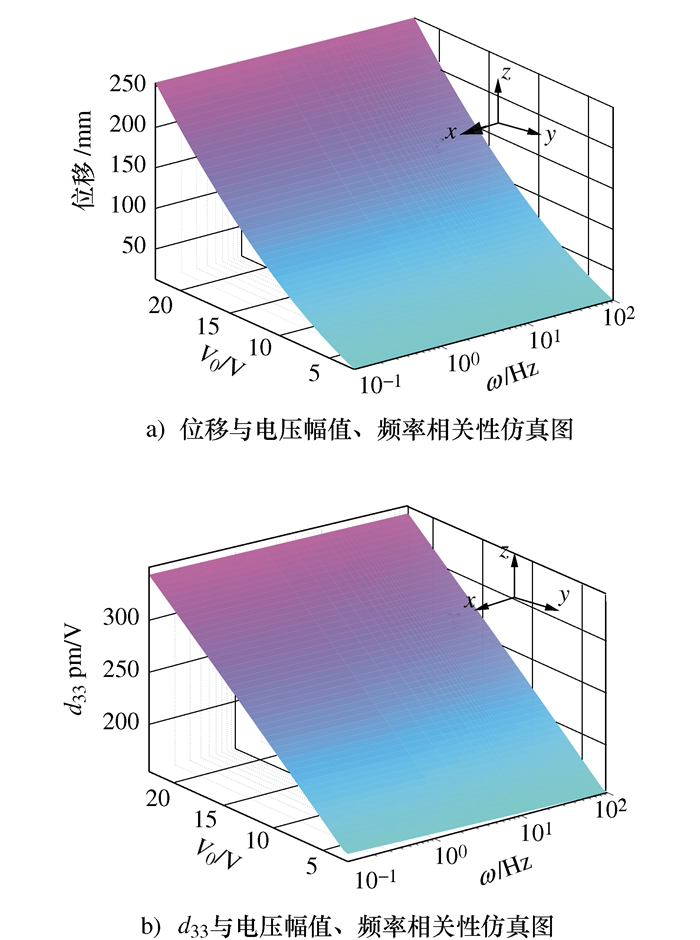
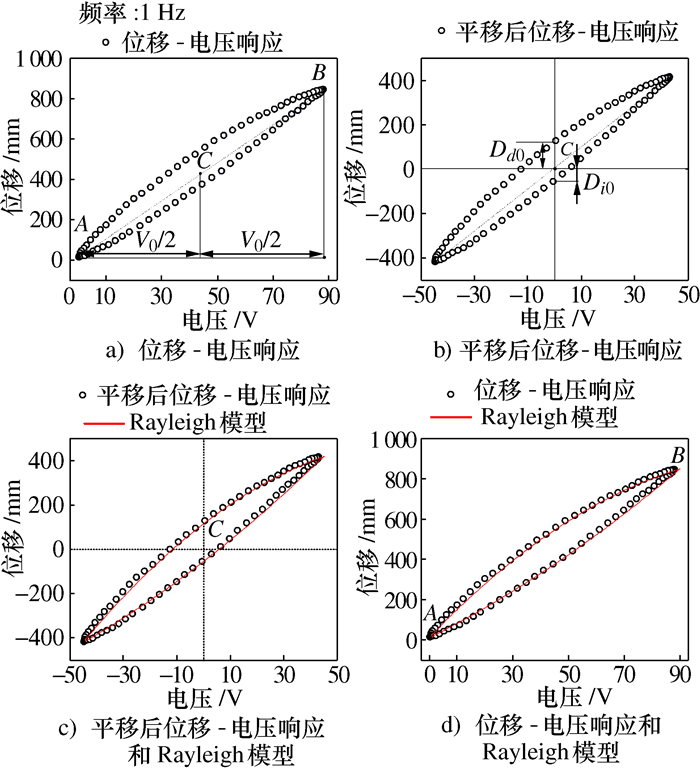
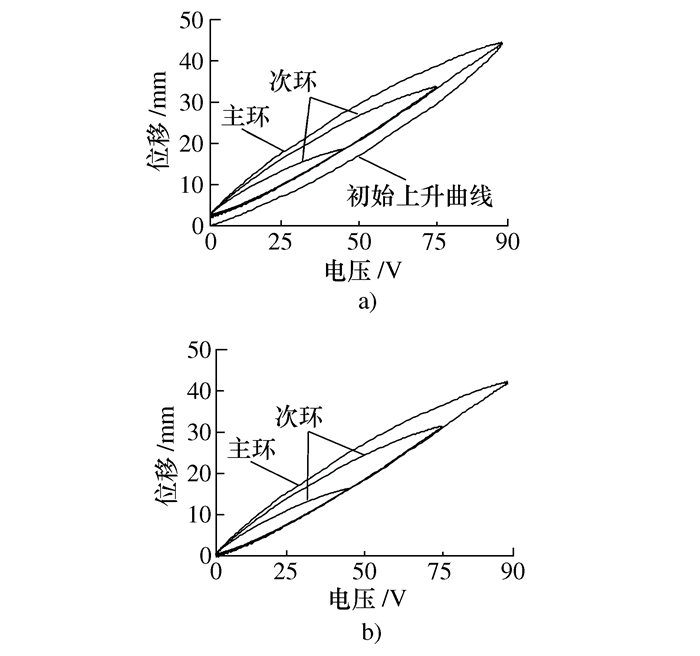
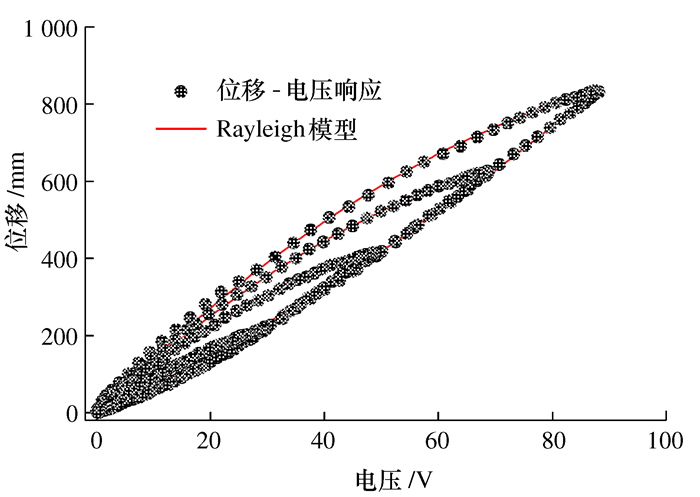
针对压电陶瓷驱动器建模复杂的技术难点, 本文提出了一种基于修正Rayleigh模型的动态迟滞非线性建模方法。首先, 针对压电陶瓷材料的机电响应特性, 构建了压电驱动器的线性本构方程; 然后, 基于迟滞效应成因及其微观机理研究, 提出了采用Rayleigh模型的非线性建模方法; 在此基础上, 采用一阶线性方程描述压电驱动器频率相关特性并通过实验验证其有效性; 之后, 采用双Rayleigh系数, 构建了非对称Rayleigh模型; 最后, 实验验证了Rayleigh模型在压电陶瓷驱动器次环响应中的适用性。
针对压电陶瓷驱动器建模复杂的技术难点, 本文提出了一种基于修正Rayleigh模型的动态迟滞非线性建模方法。首先, 针对压电陶瓷材料的机电响应特性, 构建了压电驱动器的线性本构方程; 然后, 基于迟滞效应成因及其微观机理研究, 提出了采用Rayleigh模型的非线性建模方法; 在此基础上, 采用一阶线性方程描述压电驱动器频率相关特性并通过实验验证其有效性; 之后, 采用双Rayleigh系数, 构建了非对称Rayleigh模型; 最后, 实验验证了Rayleigh模型在压电陶瓷驱动器次环响应中的适用性。
2024, 43(4): 591-599.
doi: 10.13433/j.cnki.1003-8728.20220251
摘要:
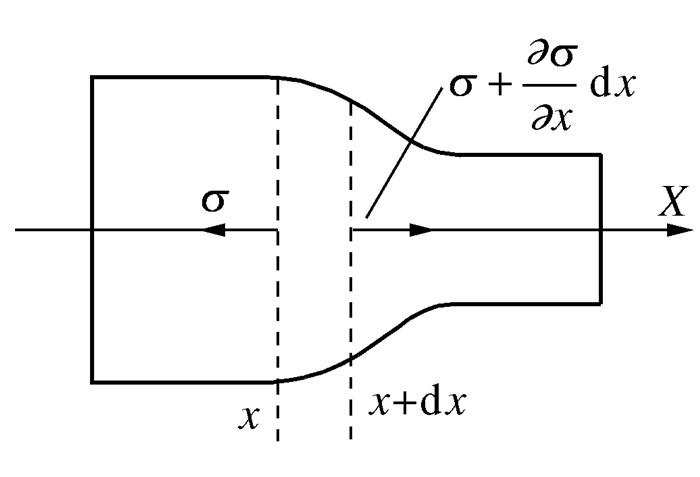
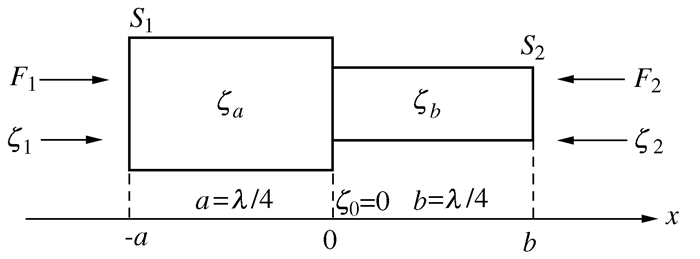
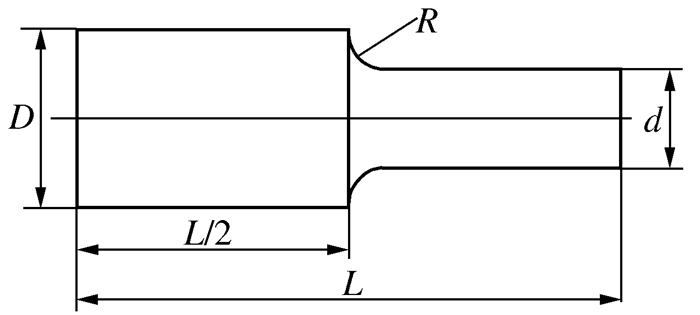
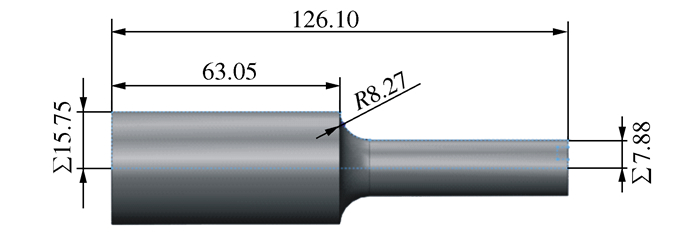
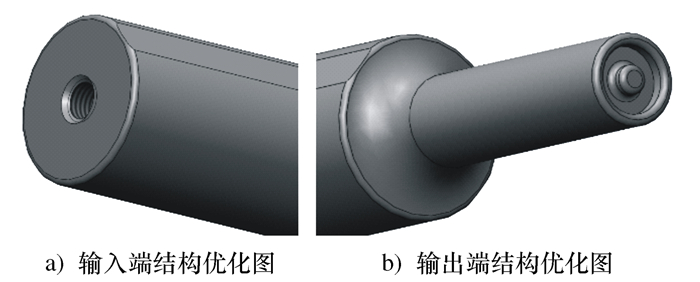
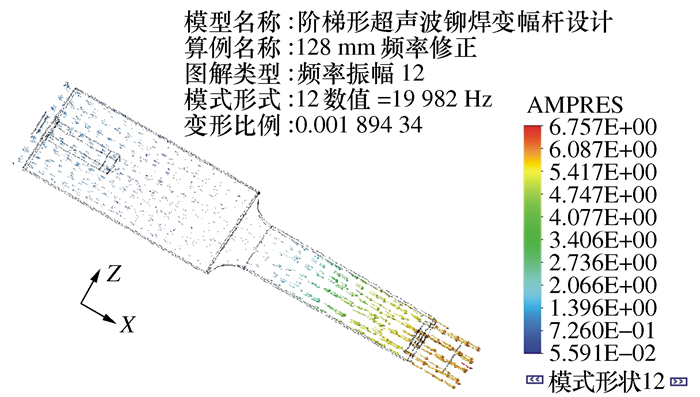
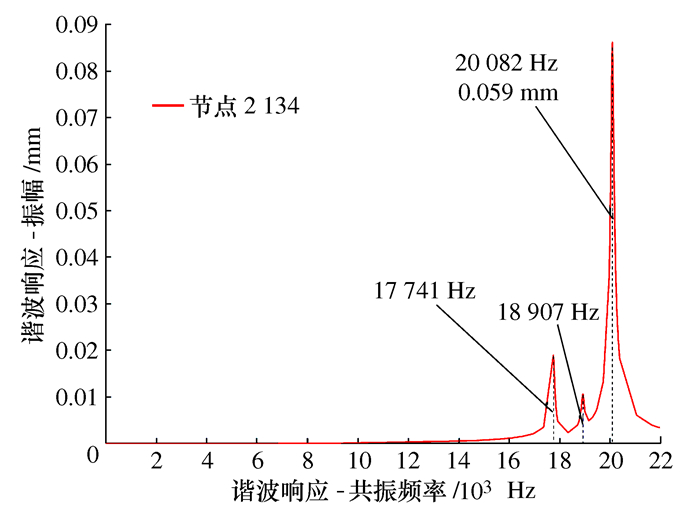
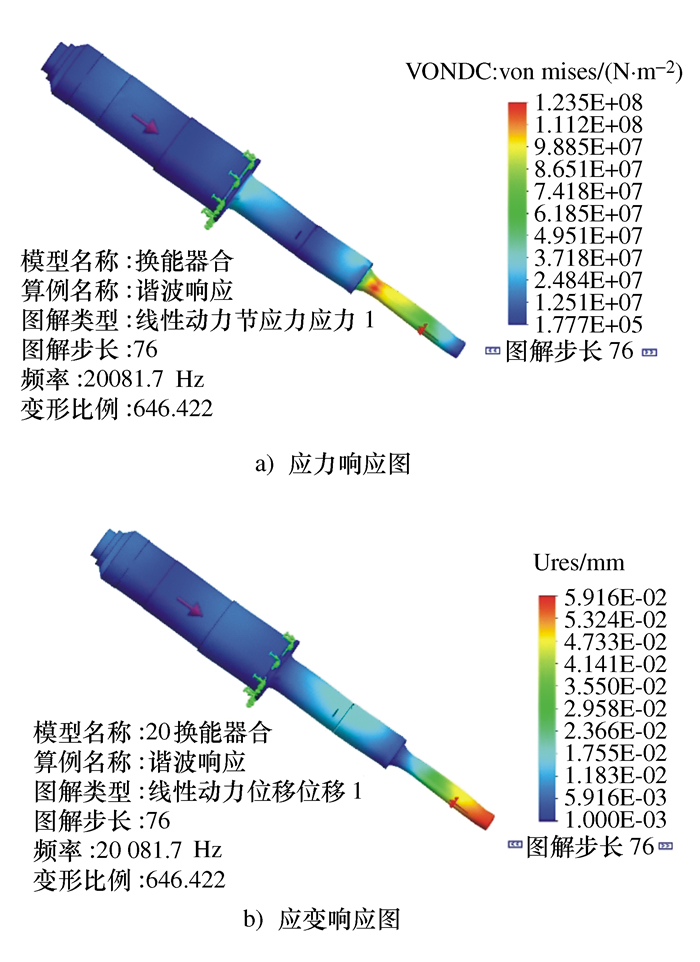
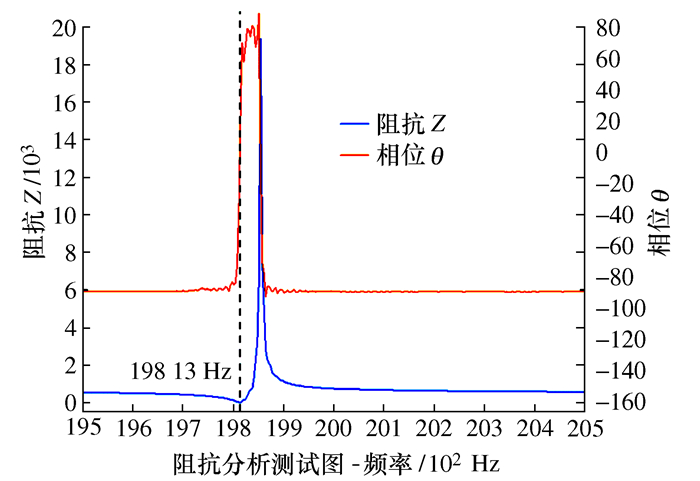
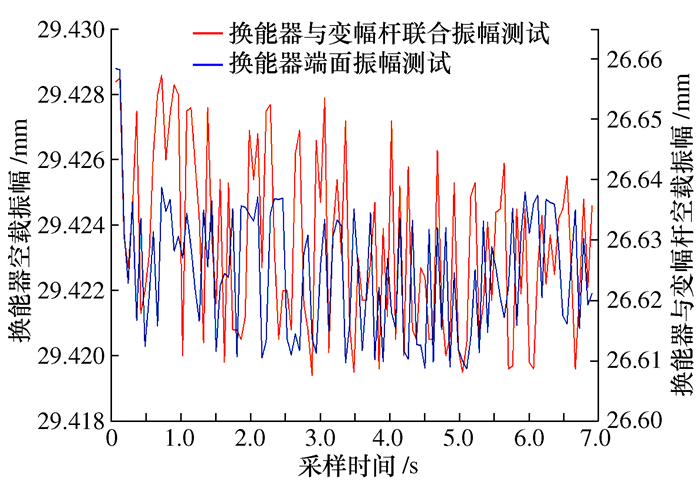
功率超声塑料铆焊变幅杆的设计中, 纵波谐振频率和振幅是设计的关键。某工程实践中以阶梯形铆焊变幅杆为设计对象, 有限元模态分析中, 其纵波固有频率为19 982 Hz, 谐波扫频响应共振频率为20 082 Hz, 阻抗测试频率为19 813 Hz, 三者误差率较小, 且在材料阻尼率为0.004时, 变幅杆端头有仿真最大振幅59.16 μm, 与激光测振仪测量的振幅49.8 μm同样误差较小, 实践加工验证, 铆焊效果较好。结果表明有限元固有模态、谐波响应、阻抗分析、振幅测试分析可为超声变幅杆的工程设计提供高效的设计、分析、测试方法。
功率超声塑料铆焊变幅杆的设计中, 纵波谐振频率和振幅是设计的关键。某工程实践中以阶梯形铆焊变幅杆为设计对象, 有限元模态分析中, 其纵波固有频率为19 982 Hz, 谐波扫频响应共振频率为20 082 Hz, 阻抗测试频率为19 813 Hz, 三者误差率较小, 且在材料阻尼率为0.004时, 变幅杆端头有仿真最大振幅59.16 μm, 与激光测振仪测量的振幅49.8 μm同样误差较小, 实践加工验证, 铆焊效果较好。结果表明有限元固有模态、谐波响应、阻抗分析、振幅测试分析可为超声变幅杆的工程设计提供高效的设计、分析、测试方法。



2024, 43(4): 600-610.
doi: 10.13433/j.cnki.1003-8728.20220246
摘要:
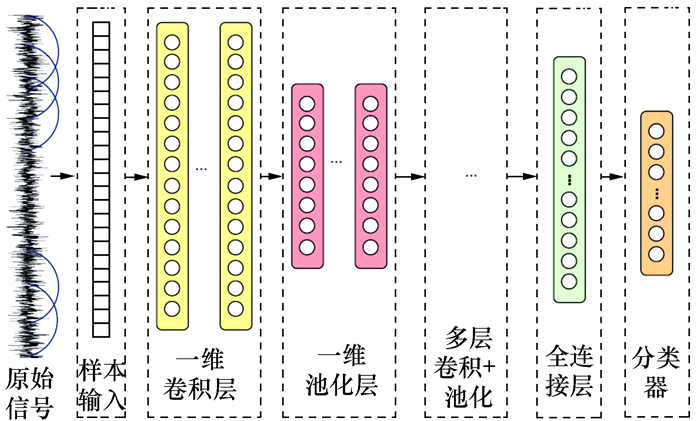
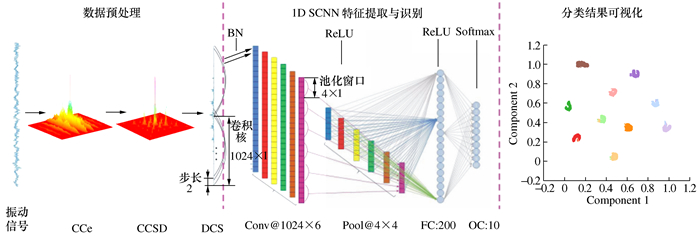
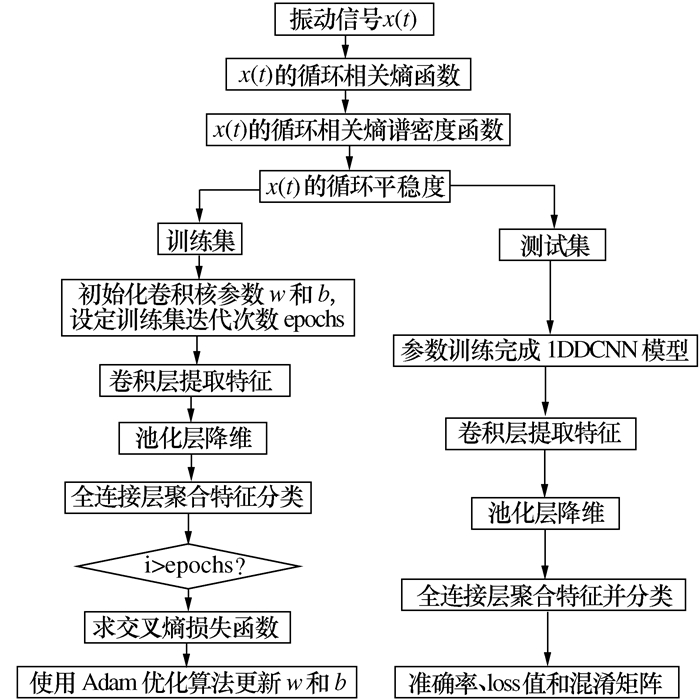
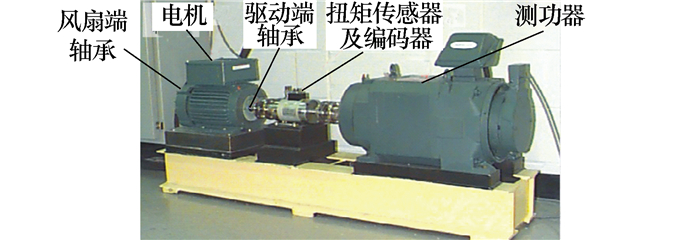
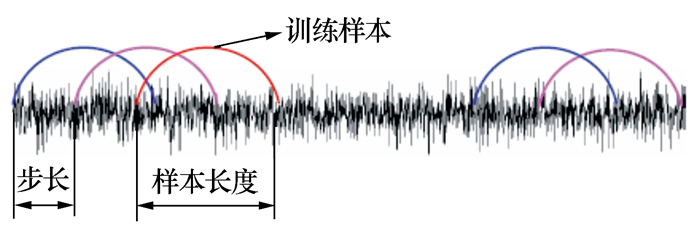
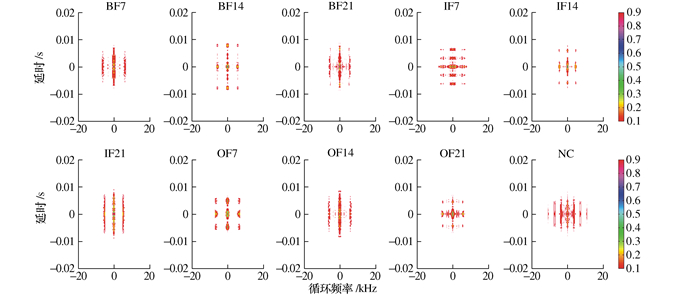
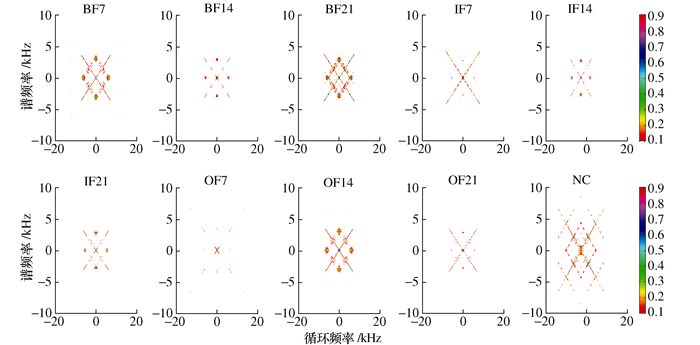
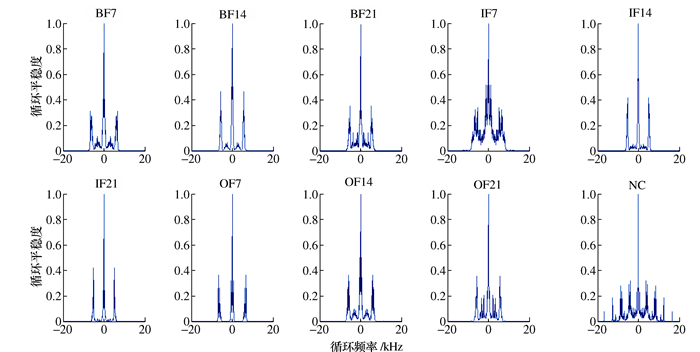
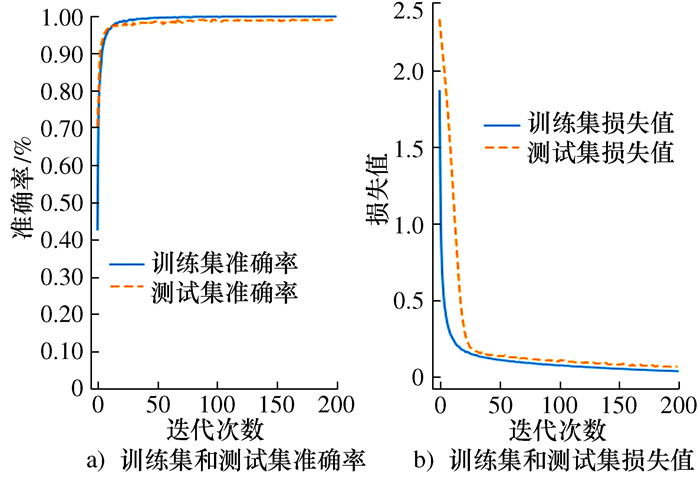
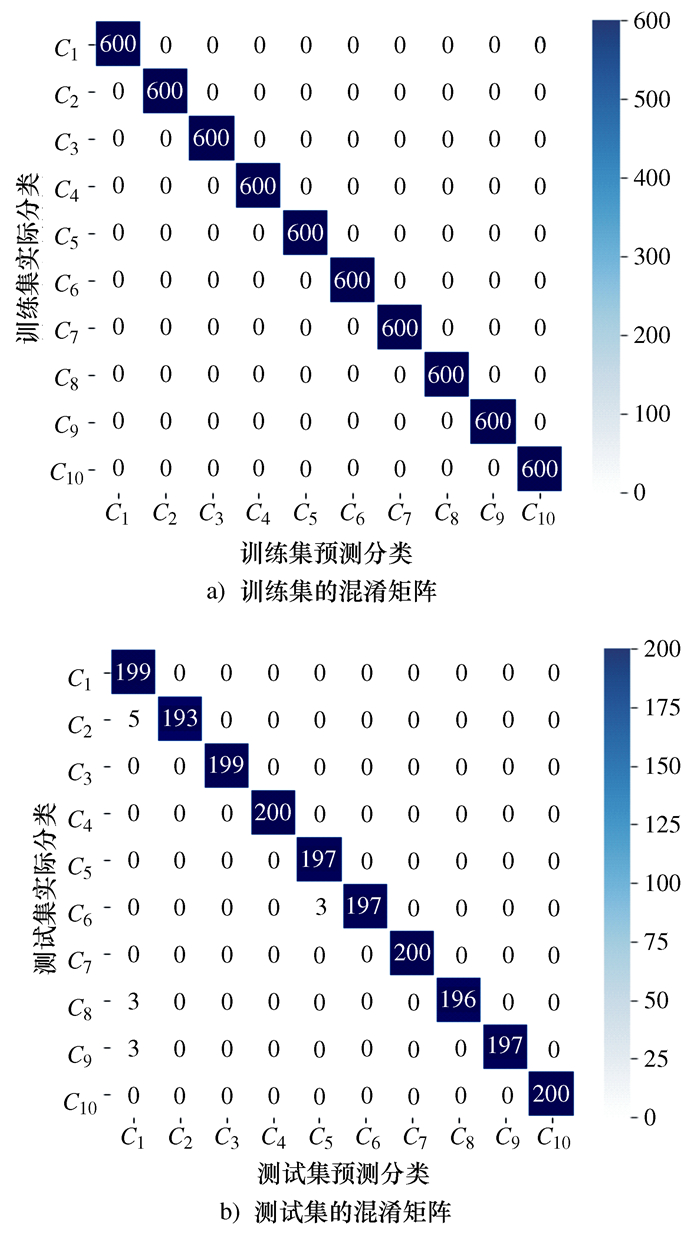
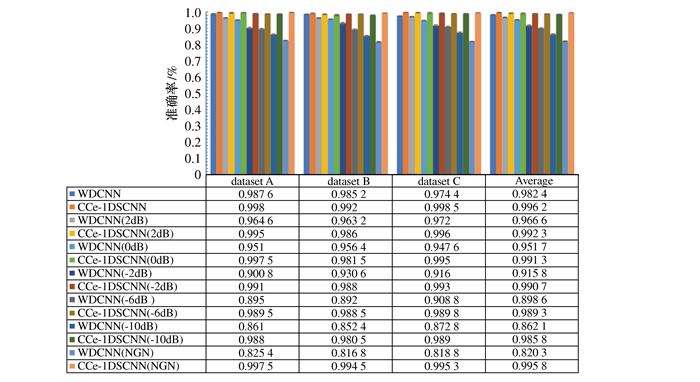
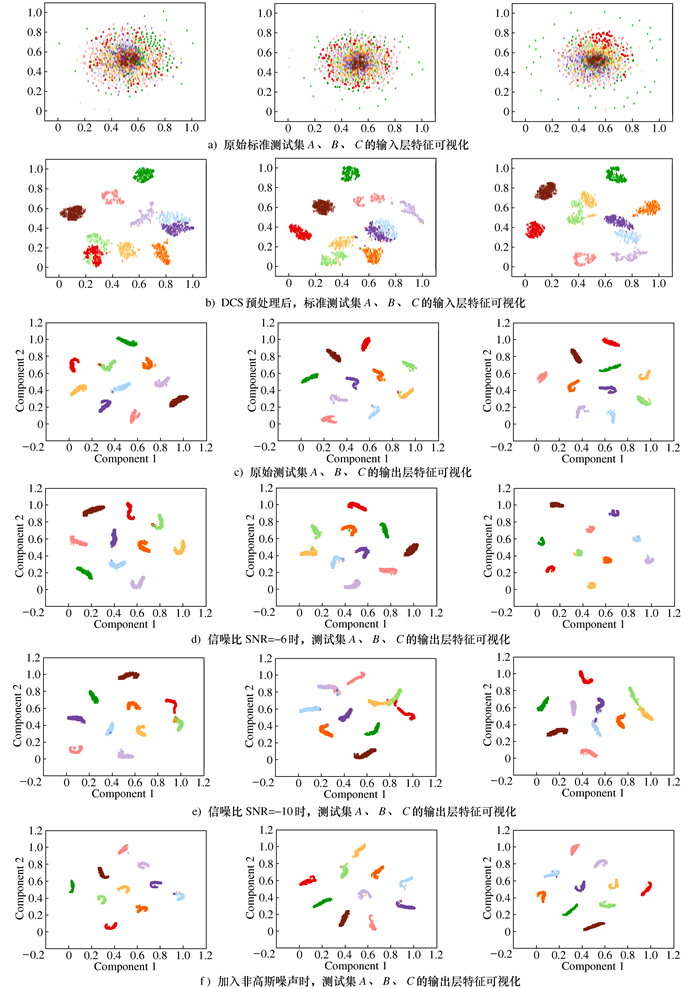
针对传统二维深度卷积神经网络结构复杂、易产生过拟合和难以有效处理低信噪比信号的问题, 提出了一种基于循环相关熵和一维浅卷积神经网络的故障诊断-CCe-1D SCNN方法。该方法综合利用了一维浅卷积神经网络结构简单、计算复杂度低和循环相关熵能在低信噪比环境下有效提取故障特征的优点。首先, 计算轴承故障振动信号的循环相关熵函数、循环相关熵谱密度函数和广义循环平稳度; 其次, 将一维归一化的广义循环平稳度作为一维浅卷积神经网络的输入层, 通过一维浅卷积神经网络自动实现故障特征提取和模式分类; 最后, 将CCe-1D SCNN方法应用于电机轴承故障特征提取和分类, 实验结果表明: CCe-1D SCNN方法在低噪声比情况下仍能保持很高的模式识别正确率, 为一种自动故障特征提取和模式识别的有效方法。
针对传统二维深度卷积神经网络结构复杂、易产生过拟合和难以有效处理低信噪比信号的问题, 提出了一种基于循环相关熵和一维浅卷积神经网络的故障诊断-CCe-1D SCNN方法。该方法综合利用了一维浅卷积神经网络结构简单、计算复杂度低和循环相关熵能在低信噪比环境下有效提取故障特征的优点。首先, 计算轴承故障振动信号的循环相关熵函数、循环相关熵谱密度函数和广义循环平稳度; 其次, 将一维归一化的广义循环平稳度作为一维浅卷积神经网络的输入层, 通过一维浅卷积神经网络自动实现故障特征提取和模式分类; 最后, 将CCe-1D SCNN方法应用于电机轴承故障特征提取和分类, 实验结果表明: CCe-1D SCNN方法在低噪声比情况下仍能保持很高的模式识别正确率, 为一种自动故障特征提取和模式识别的有效方法。

2024, 43(4): 611-618.
doi: 10.13433/j.cnki.1003-8728.20240055
摘要:
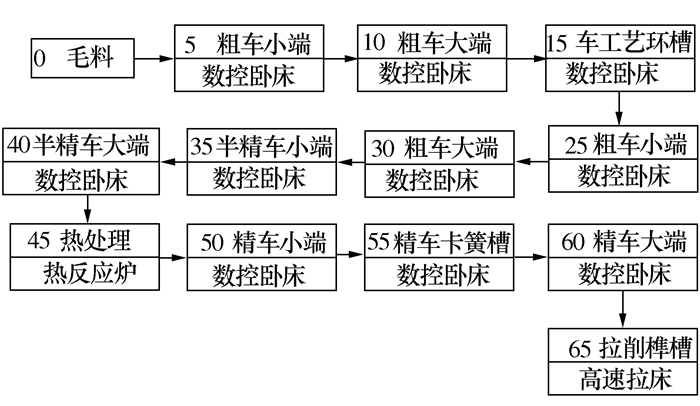
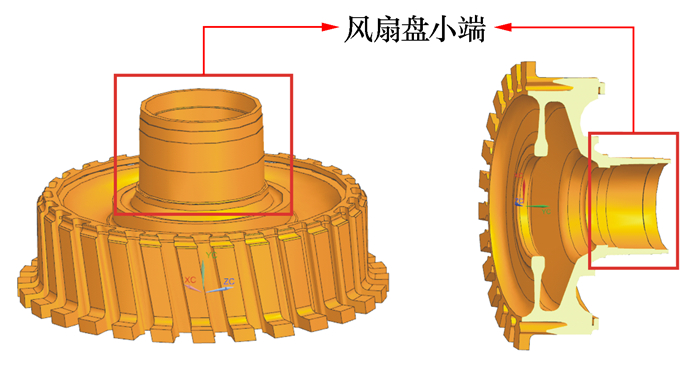
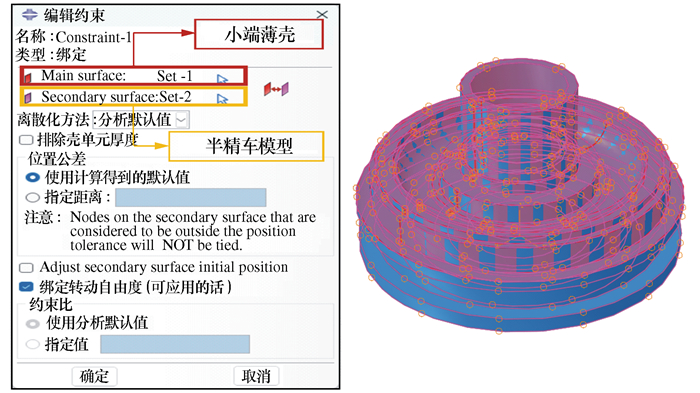
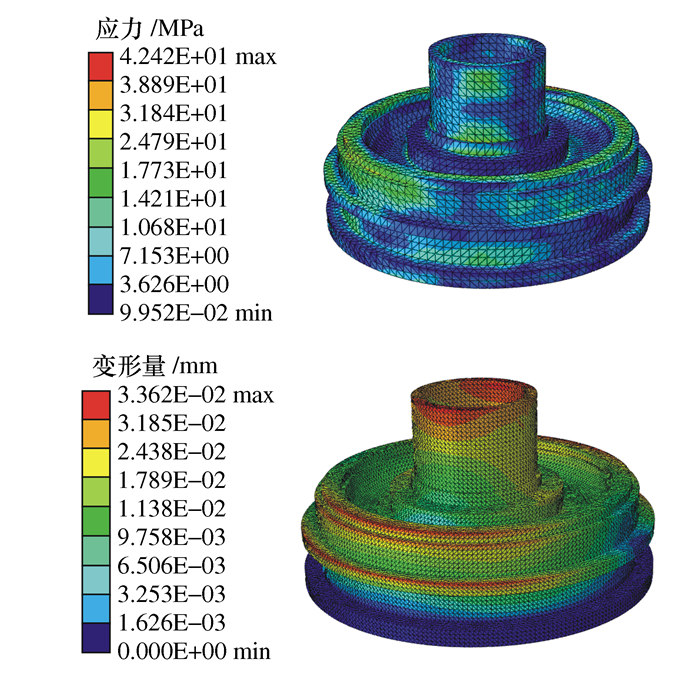
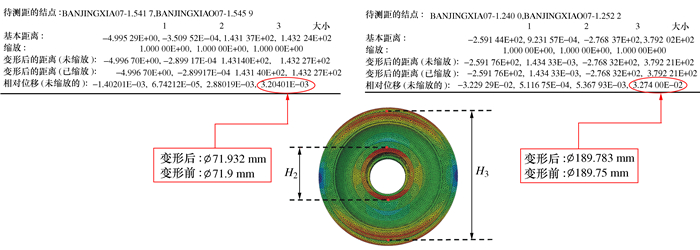
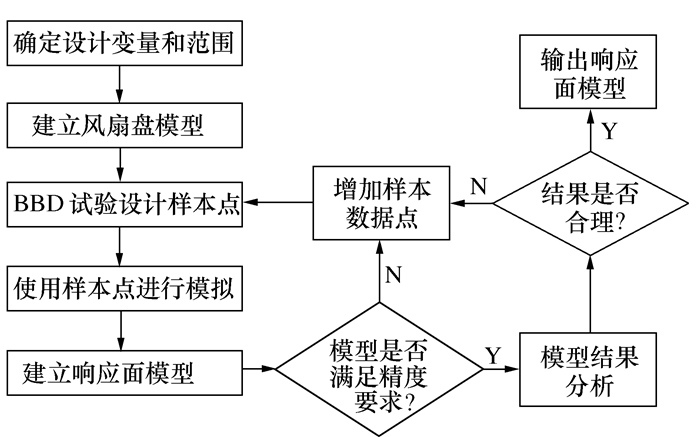
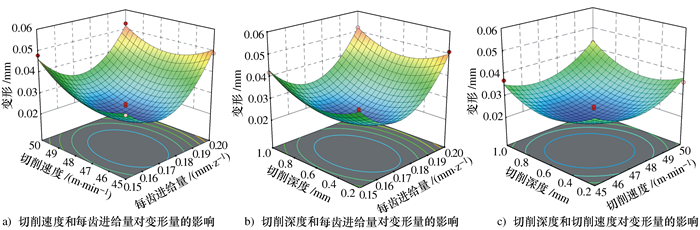
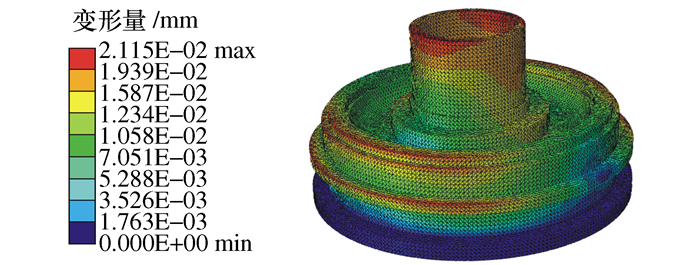
针对风扇盘材料的本构模型进行参数辨识, 为使有限元模型的模型上有准确的加工应力场进行贴合, 对TC11钛合金残余应力进行经验公式的建模, 开展残余应力仿真方法研究。对风扇盘半精车小端进行仿真建模与验证。基于残余应力仿真结果进行工艺参数优化, 通过实例加工验证了方法的有效性。
针对风扇盘材料的本构模型进行参数辨识, 为使有限元模型的模型上有准确的加工应力场进行贴合, 对TC11钛合金残余应力进行经验公式的建模, 开展残余应力仿真方法研究。对风扇盘半精车小端进行仿真建模与验证。基于残余应力仿真结果进行工艺参数优化, 通过实例加工验证了方法的有效性。
2024, 43(4): 619-627.
doi: 10.13433/j.cnki.1003-8728.20220253
摘要:
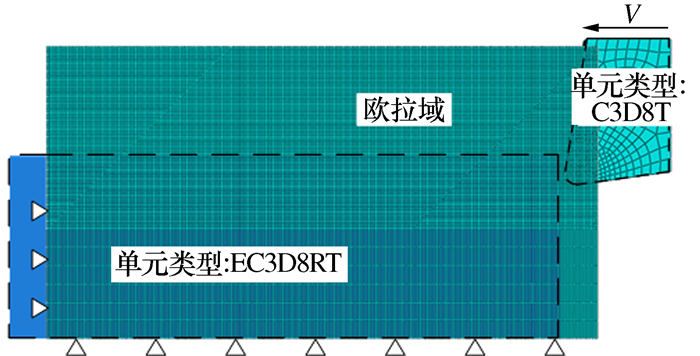
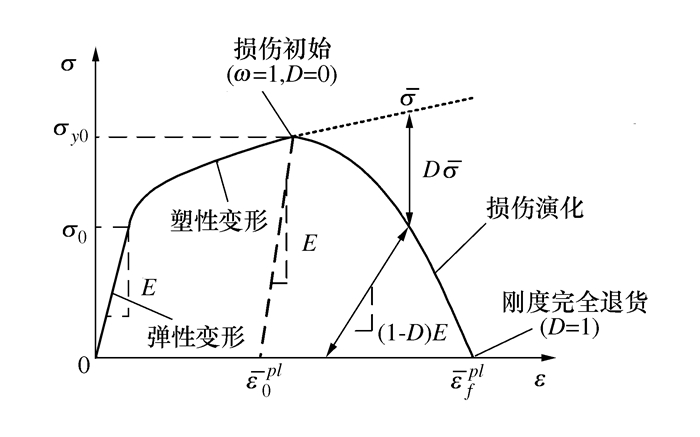
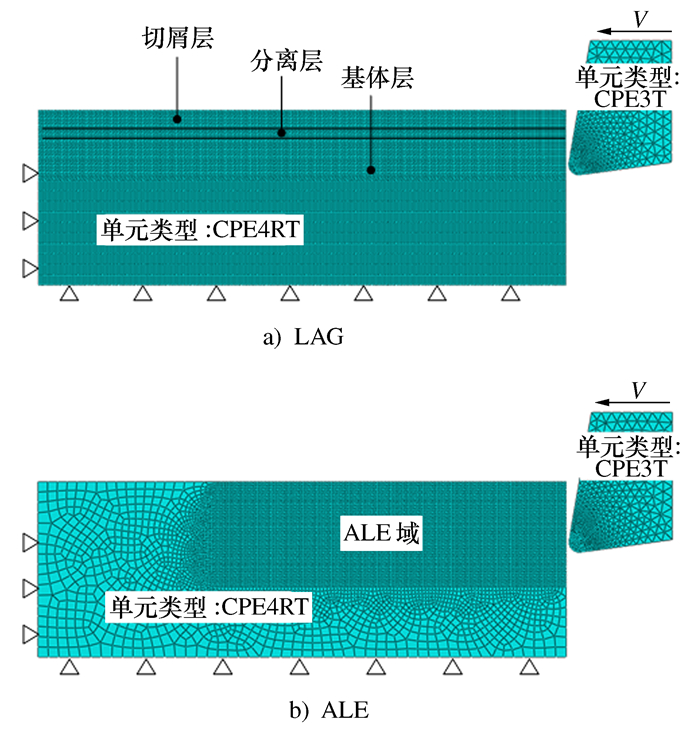
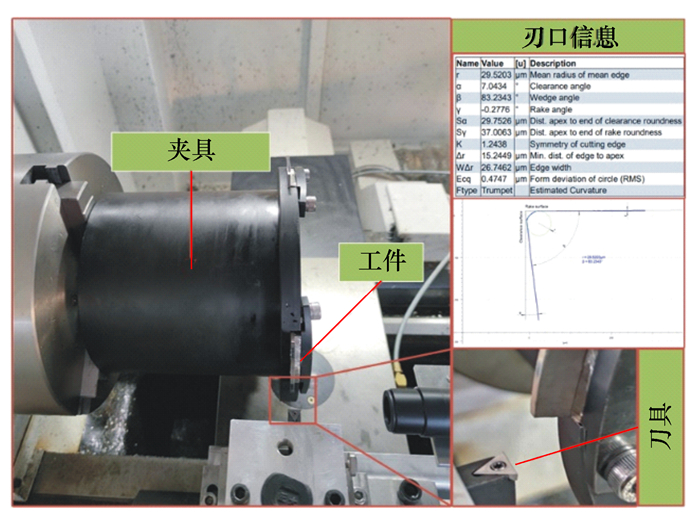
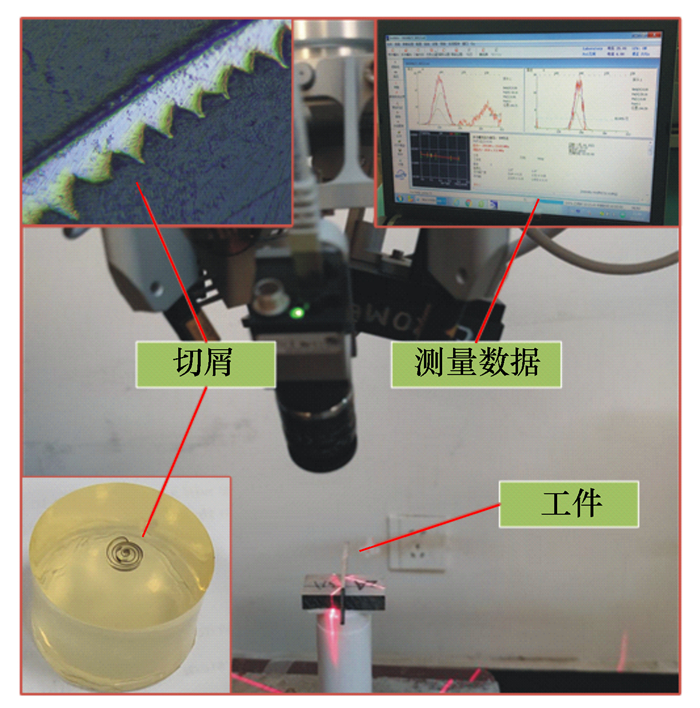
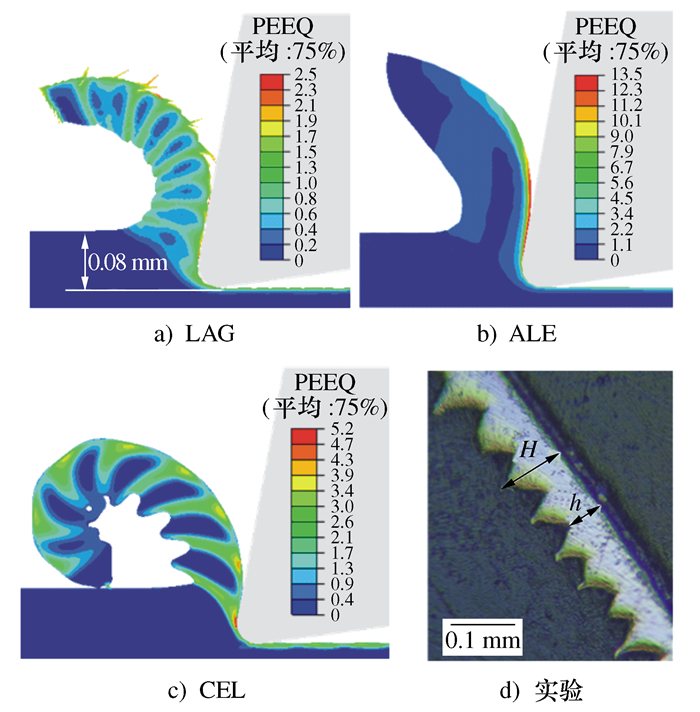
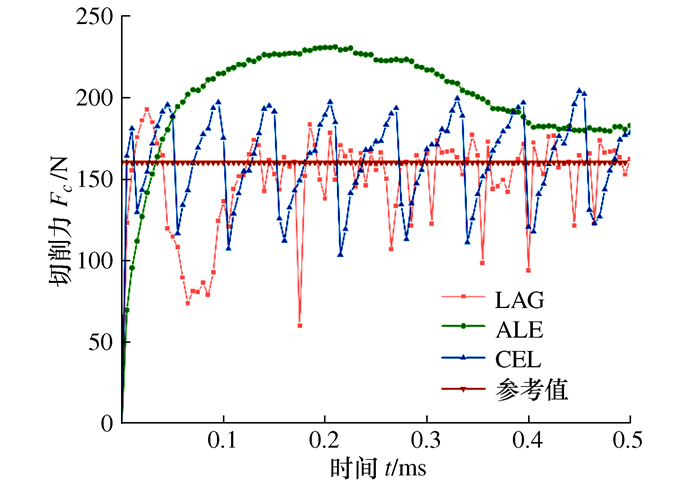
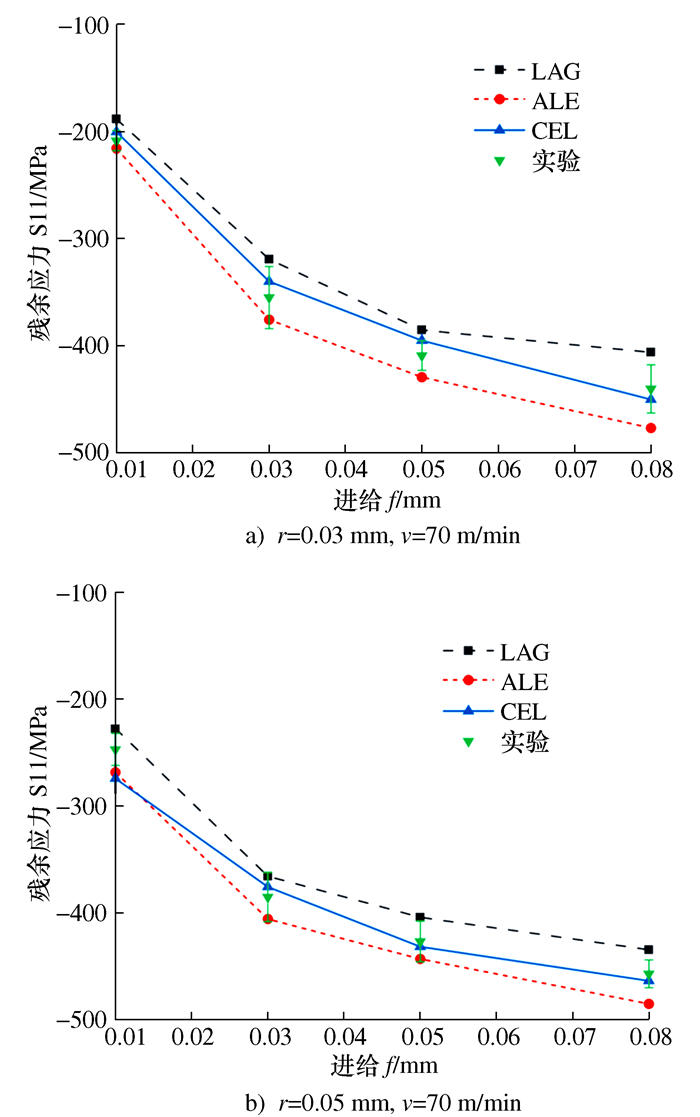
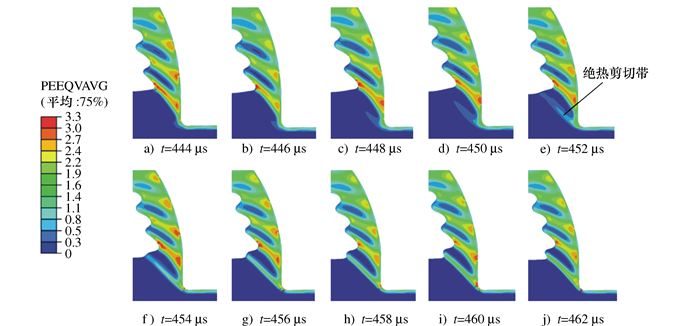
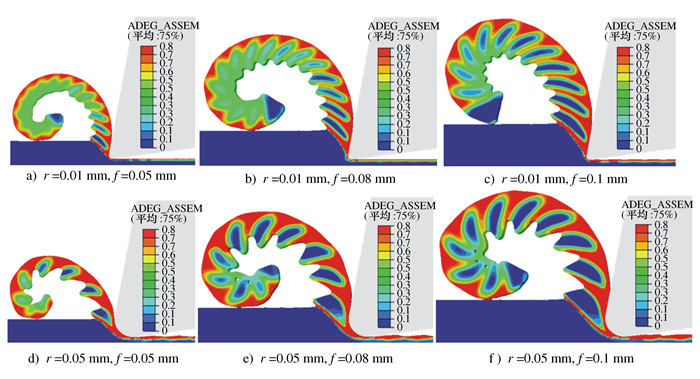
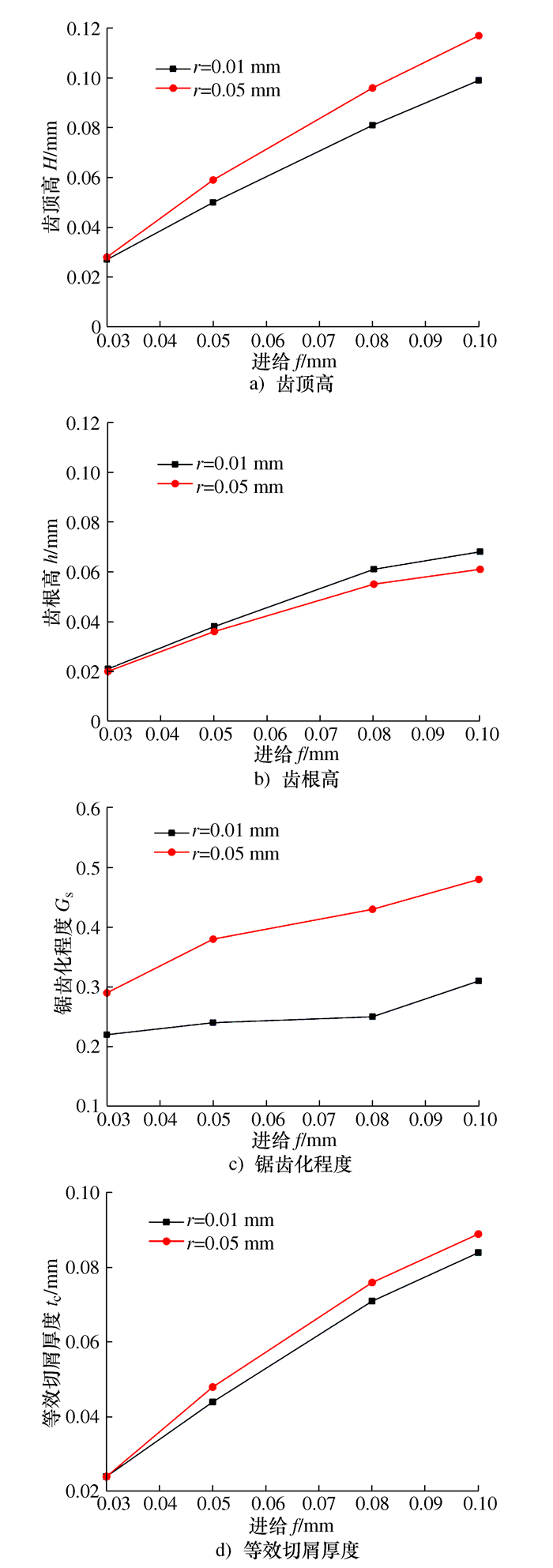
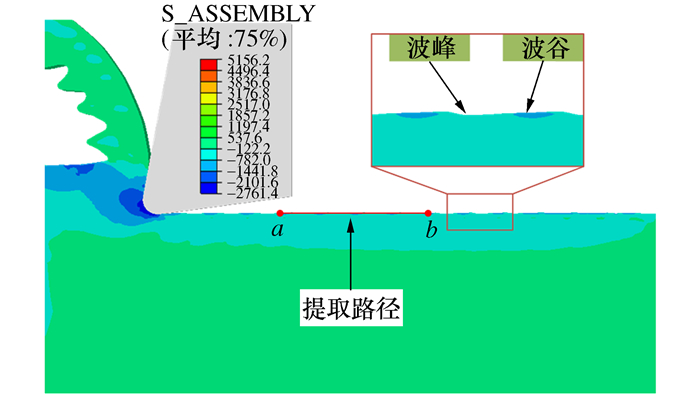
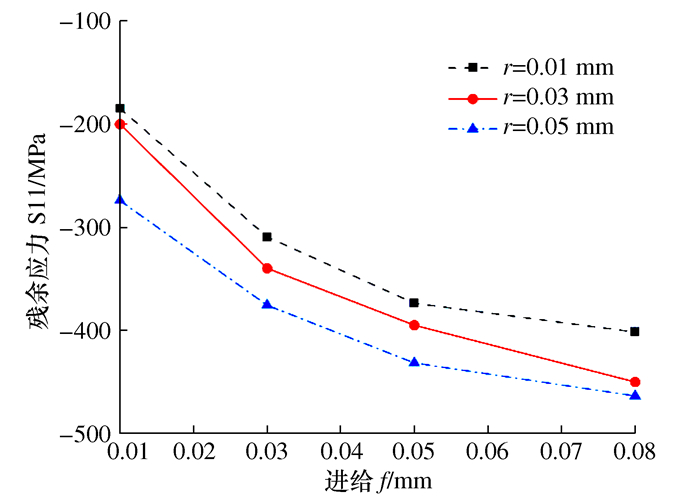
钛合金作为航空工业的常用材料, 其加工后的残余应力会严重影响到零件的使用寿命。本文针对钛合金加工建立了基于CEL方法的仿真模型, 并搭建正交实验平台测量切屑形态和残余应力来验证模型的有效性。将所提模型与传统的拉格朗日方法和ALE方法进行比较, 结果表明CEL方法虽然耗时较长但是预测结果更加准确并且不产生网格畸变, 综合性能最优。最后基于所提方法探究不同进给量和刃口半径影响下的切屑形态和加工表面残余应力。结果表明, 随着进给量和刃口半径的增大, 切屑锯齿化程度和等效切屑厚度增大, 表面残余应力随着进给量和刃口半径的增大变得更压。
钛合金作为航空工业的常用材料, 其加工后的残余应力会严重影响到零件的使用寿命。本文针对钛合金加工建立了基于CEL方法的仿真模型, 并搭建正交实验平台测量切屑形态和残余应力来验证模型的有效性。将所提模型与传统的拉格朗日方法和ALE方法进行比较, 结果表明CEL方法虽然耗时较长但是预测结果更加准确并且不产生网格畸变, 综合性能最优。最后基于所提方法探究不同进给量和刃口半径影响下的切屑形态和加工表面残余应力。结果表明, 随着进给量和刃口半径的增大, 切屑锯齿化程度和等效切屑厚度增大, 表面残余应力随着进给量和刃口半径的增大变得更压。
2024, 43(4): 628-636.
doi: 10.13433/j.cnki.1003-8728.20220258
摘要:
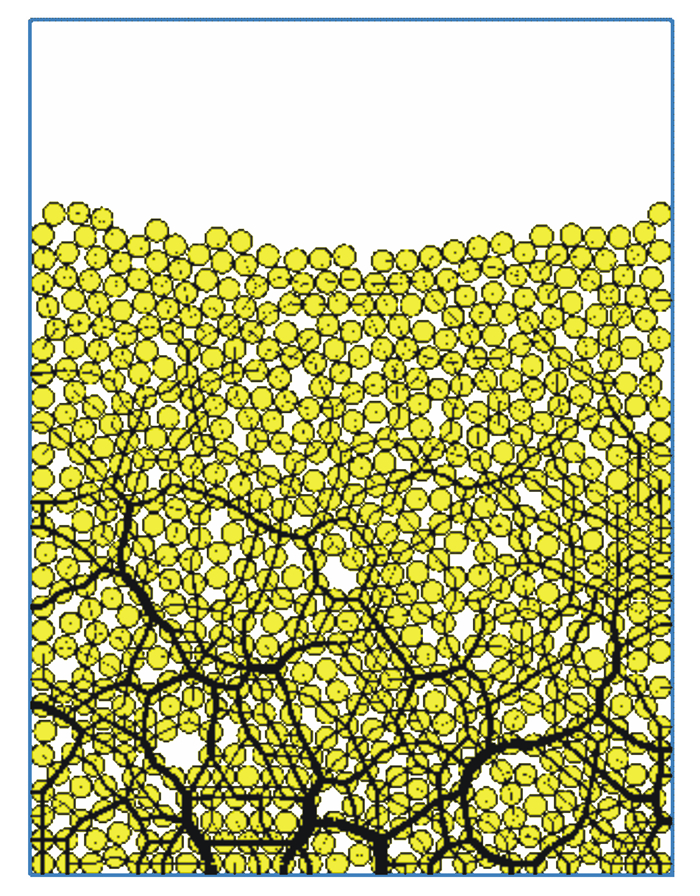
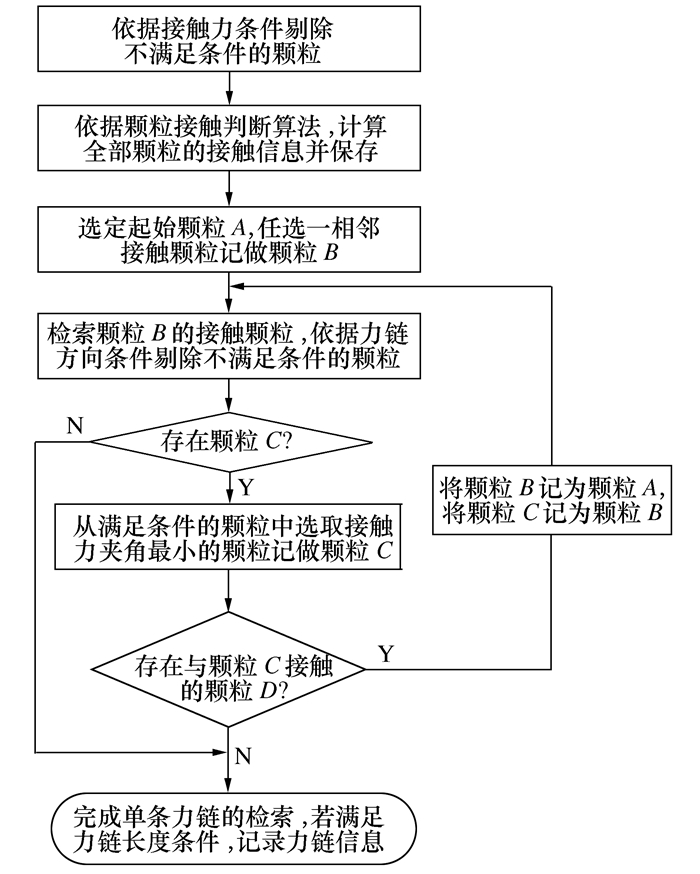
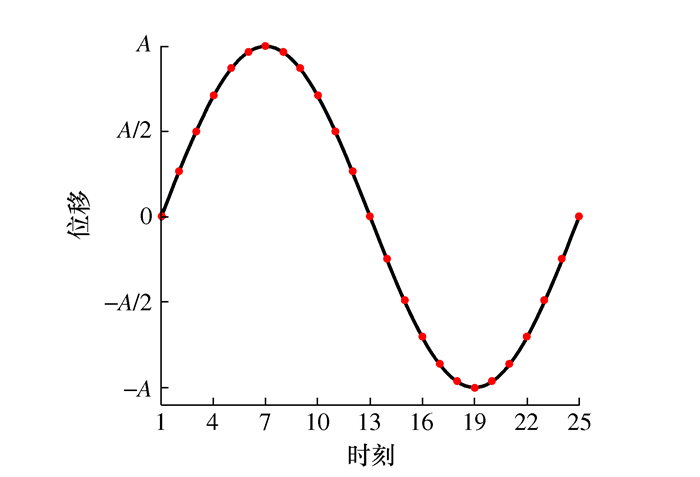
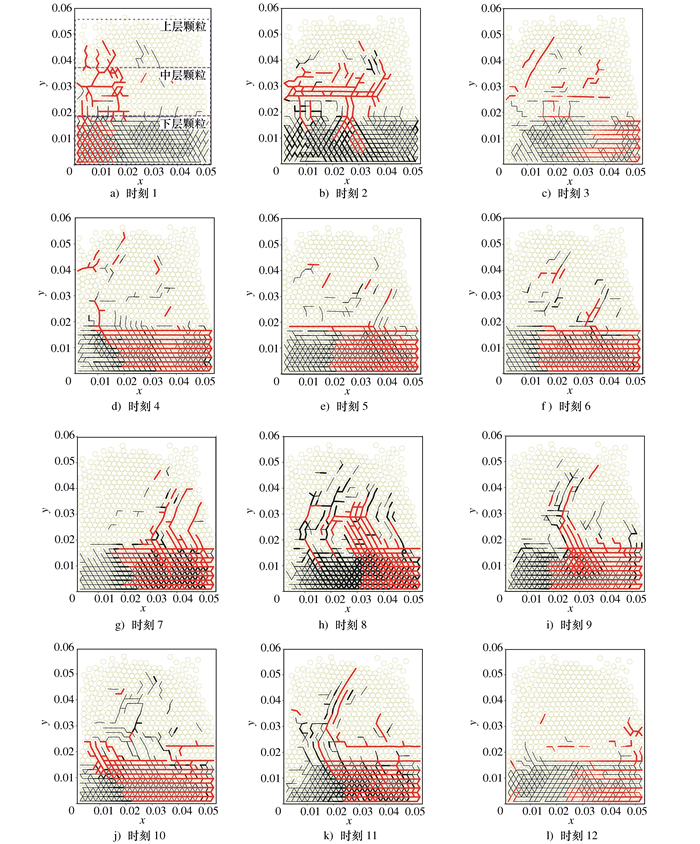
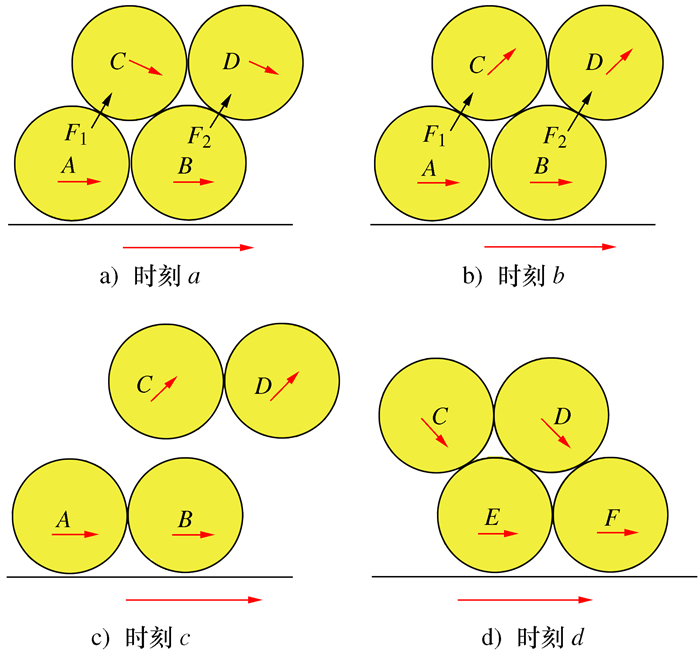
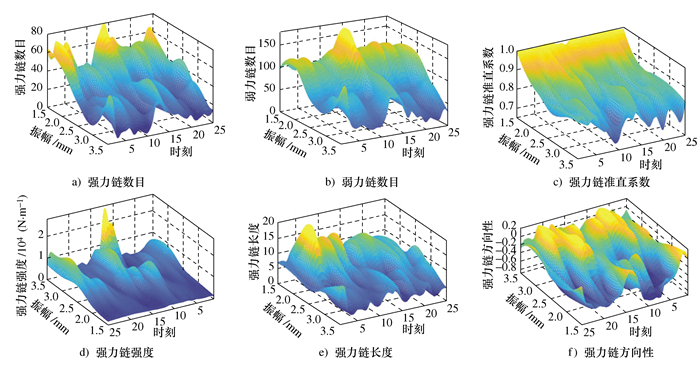
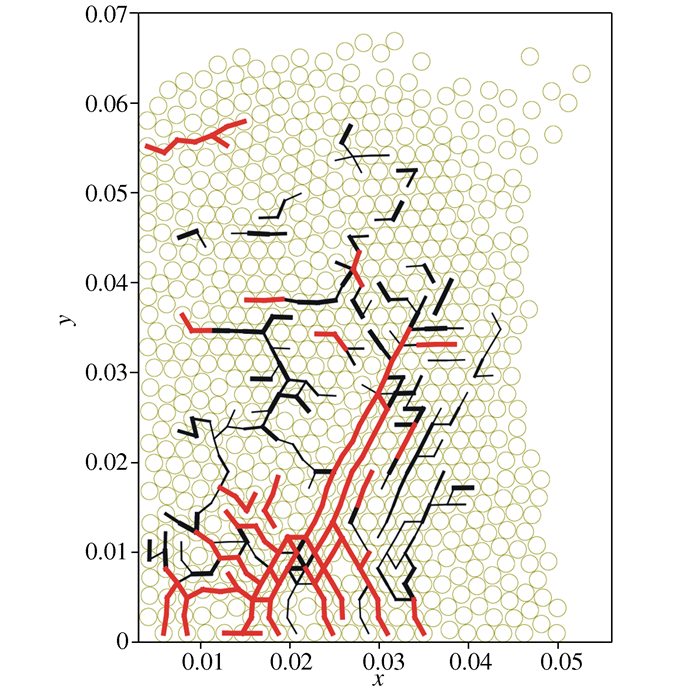
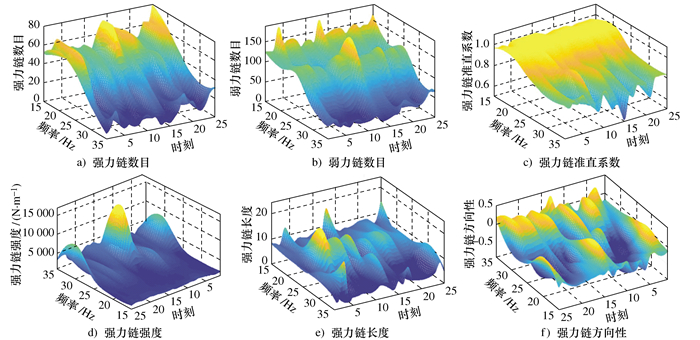
滚磨光整加工中磨块颗粒介质内力链网络影响颗粒群的宏观行为, 进而影响加工效果。本文建立水平振动式滚磨光整加工离散元模型, 分析颗粒介质介观尺度力链网络动态演化机制与宏观运动行为的联系, 并对力链网络进行量化表征研究。结果表明: 力链网络复杂的时空分布特性决定了颗粒群的运动特征, 提高激振参数, 颗粒介质出现流态化现象, 力链数目减少, 强力链长度变短、准直系数减小、强度提高、方向偏向重力方向。研究工作为形成滚磨光整加工多尺度研究策略提供了一定的分析方法。
滚磨光整加工中磨块颗粒介质内力链网络影响颗粒群的宏观行为, 进而影响加工效果。本文建立水平振动式滚磨光整加工离散元模型, 分析颗粒介质介观尺度力链网络动态演化机制与宏观运动行为的联系, 并对力链网络进行量化表征研究。结果表明: 力链网络复杂的时空分布特性决定了颗粒群的运动特征, 提高激振参数, 颗粒介质出现流态化现象, 力链数目减少, 强力链长度变短、准直系数减小、强度提高、方向偏向重力方向。研究工作为形成滚磨光整加工多尺度研究策略提供了一定的分析方法。


2024, 43(4): 637-642.
doi: 10.13433/j.cnki.1003-8728.20220243
摘要:
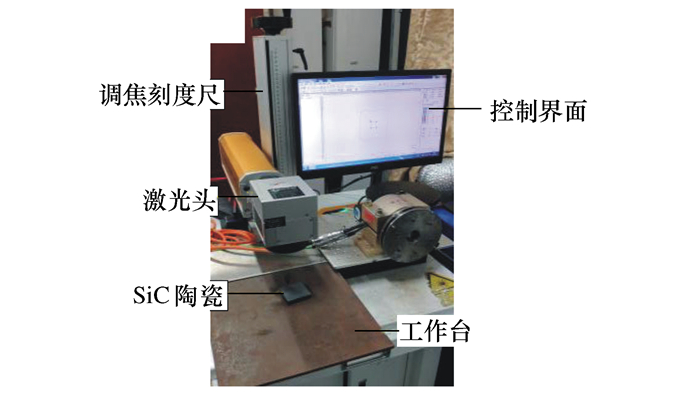
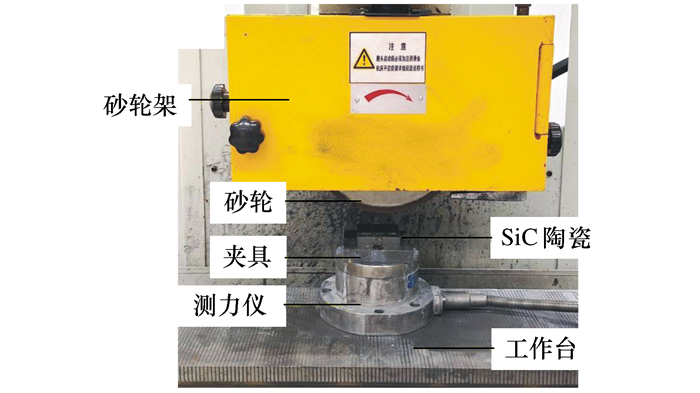
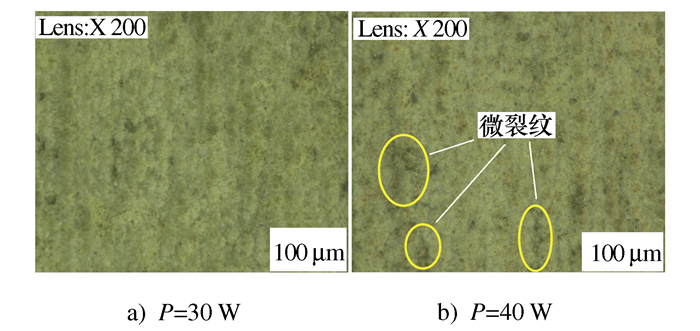
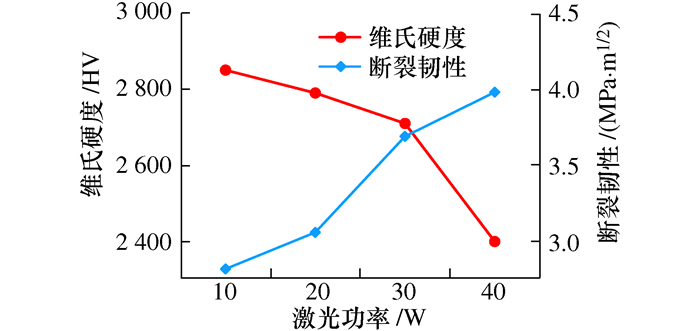
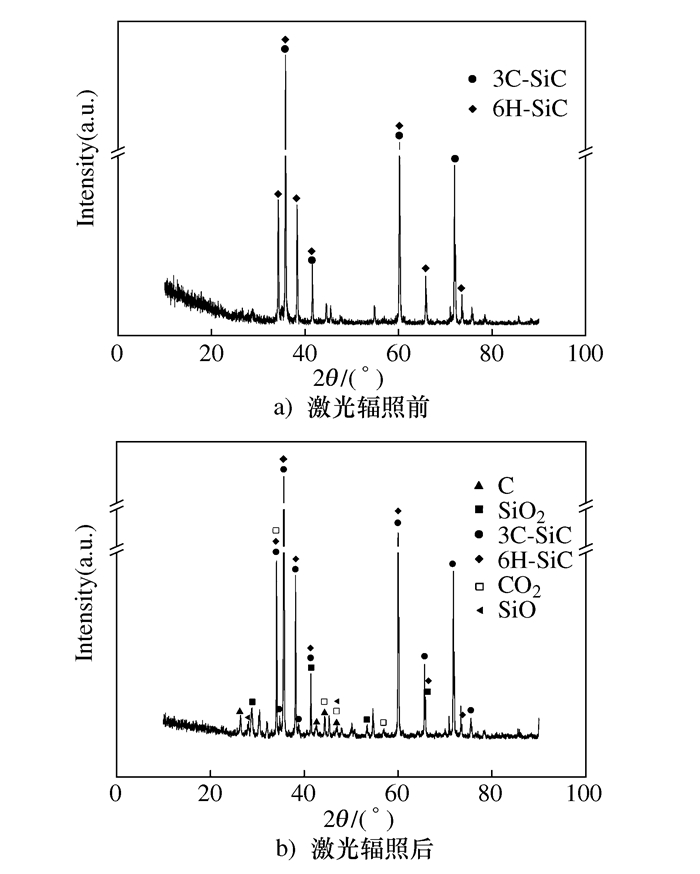
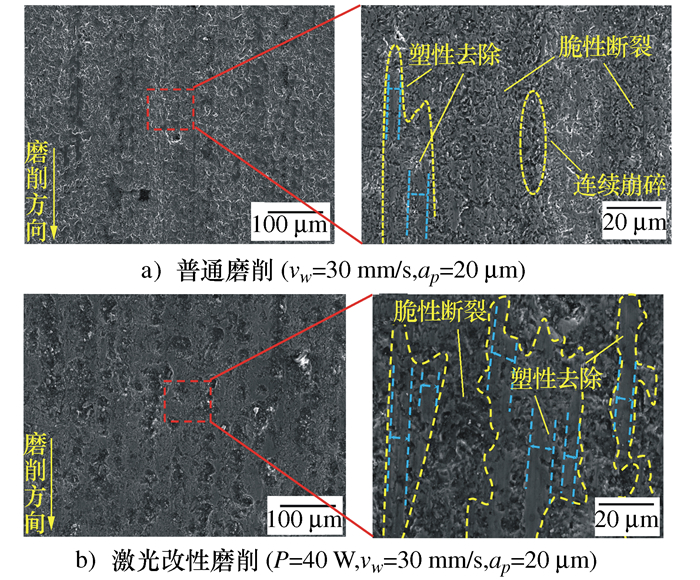
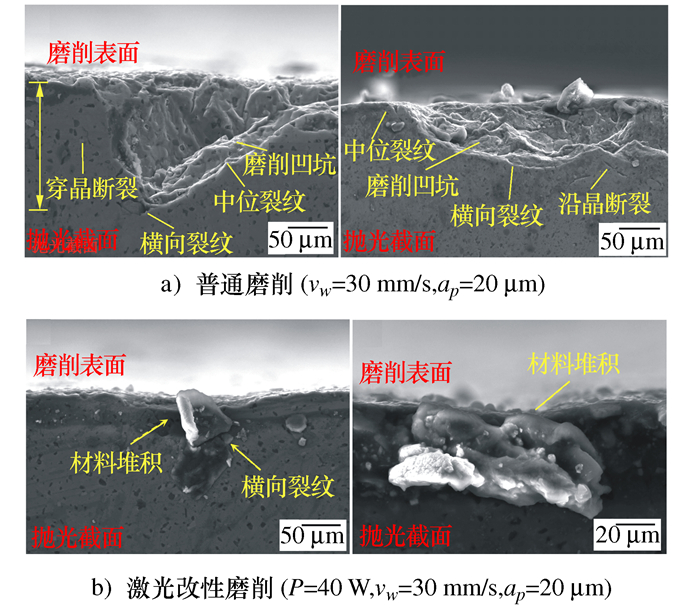
为了实现碳化硅陶瓷的高精加工, 激光辐照被引入磨削加工中。本文以碳化硅陶瓷为研究对象, 采用激光改性磨削工艺, 利用激光辐照对碳化硅陶瓷进行改性处理, 进而对碳化硅陶瓷进行磨削试验。与普通磨削进行比较, 研究了碳化硅陶瓷试样的磨削力、表面粗糙度、表面形貌和亚表面损伤。实验结果表明, 与普通磨削相比, 激光改性磨削可以有效降低法向磨削力、切向磨削力、表面粗糙度, 最大下降幅度分别为33.91%、37.31%和33.14%。激光改性磨削促使SiC陶瓷在磨削过程中以塑性去除为主, 磨削表面规则且光滑; 工件亚表面微裂纹较少, 亚表面损伤深度小; 实现了大磨削深度的塑性去除, 提高了SiC陶瓷的磨削质量。
为了实现碳化硅陶瓷的高精加工, 激光辐照被引入磨削加工中。本文以碳化硅陶瓷为研究对象, 采用激光改性磨削工艺, 利用激光辐照对碳化硅陶瓷进行改性处理, 进而对碳化硅陶瓷进行磨削试验。与普通磨削进行比较, 研究了碳化硅陶瓷试样的磨削力、表面粗糙度、表面形貌和亚表面损伤。实验结果表明, 与普通磨削相比, 激光改性磨削可以有效降低法向磨削力、切向磨削力、表面粗糙度, 最大下降幅度分别为33.91%、37.31%和33.14%。激光改性磨削促使SiC陶瓷在磨削过程中以塑性去除为主, 磨削表面规则且光滑; 工件亚表面微裂纹较少, 亚表面损伤深度小; 实现了大磨削深度的塑性去除, 提高了SiC陶瓷的磨削质量。


2024, 43(4): 643-649.
doi: 10.13433/j.cnki.1003-8728.20240046
摘要:
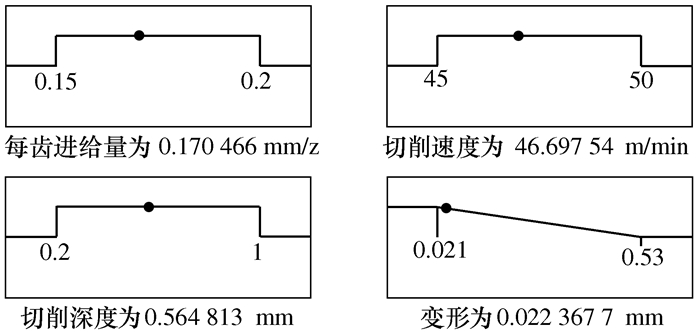
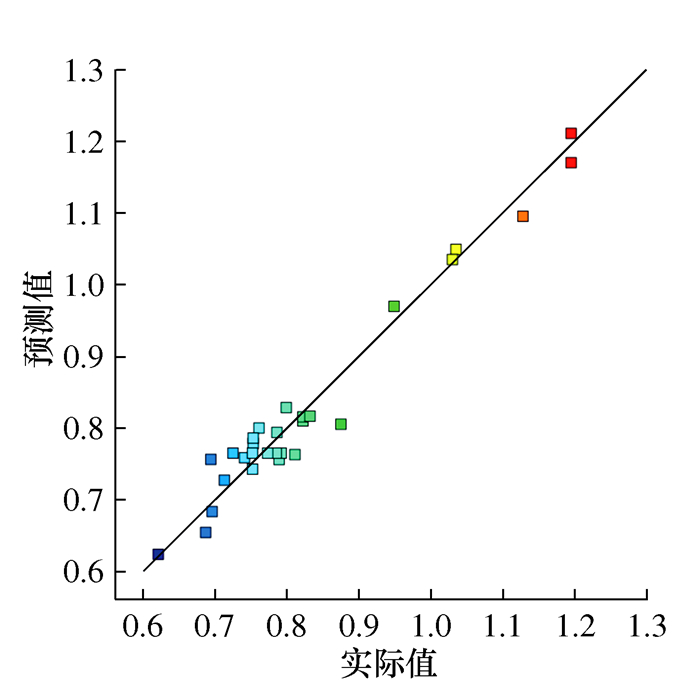
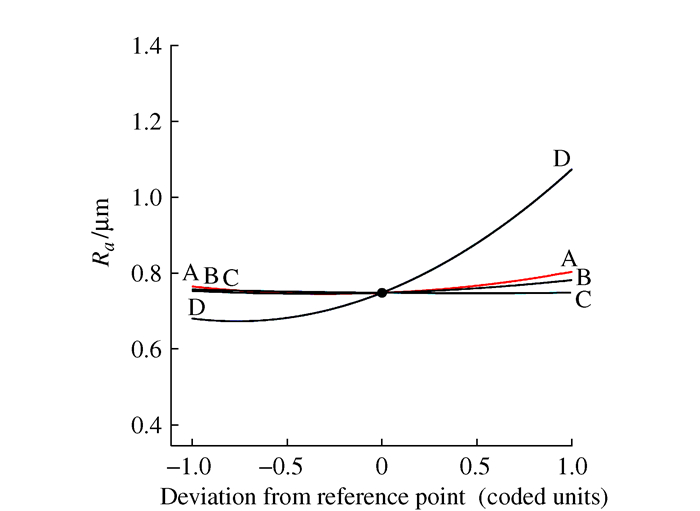
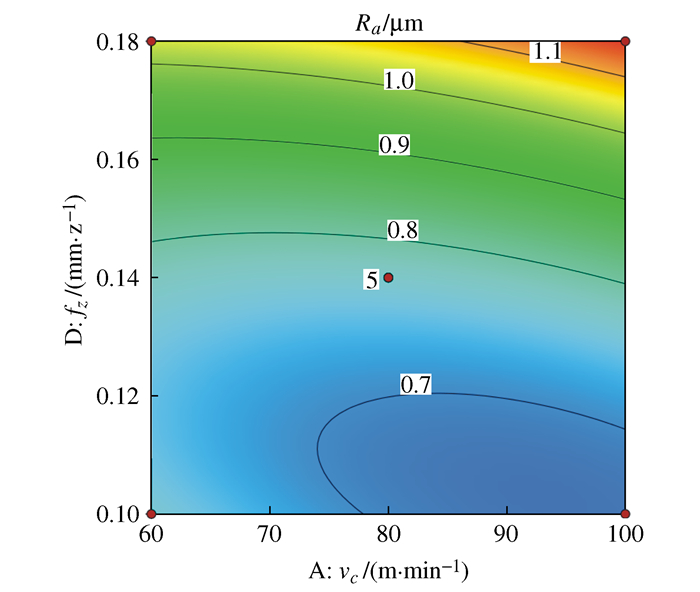
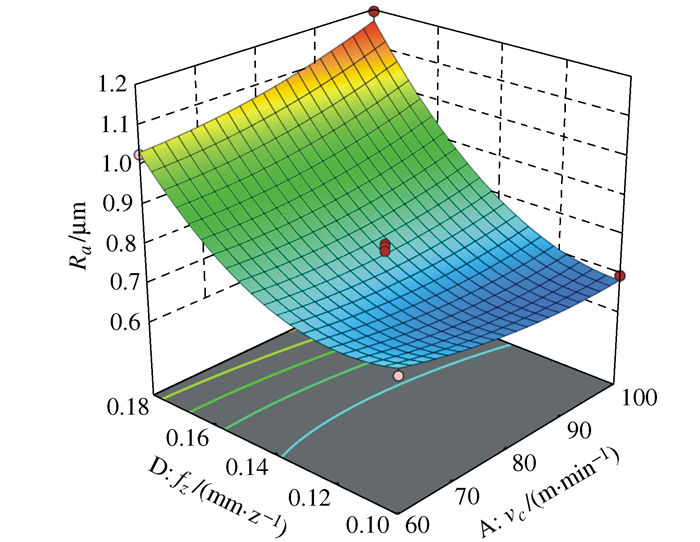
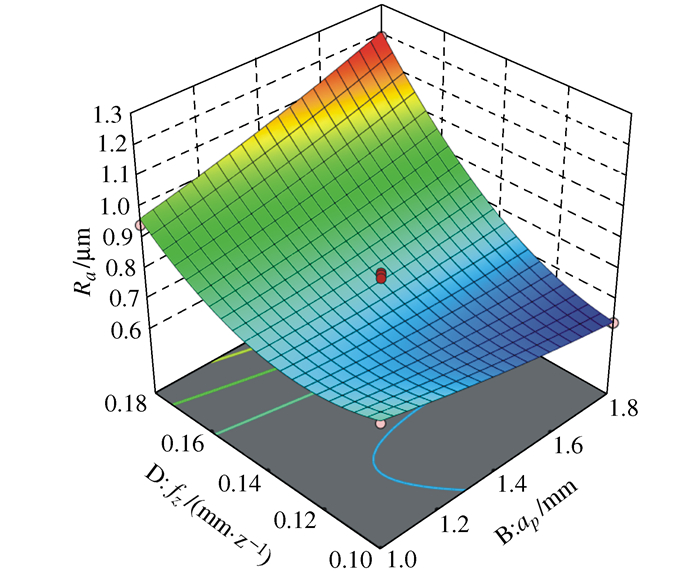
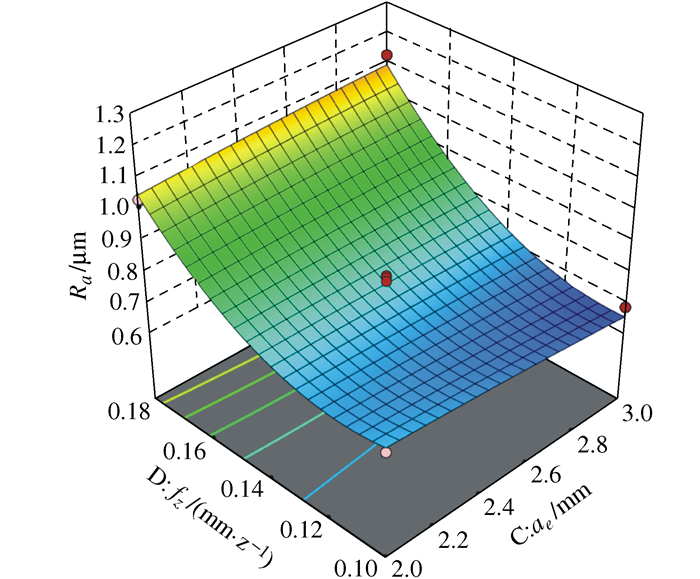
本研究采用端面铣削方式对Ti-6Al-4V ELI(TC4)钛合金进行加工, 结合工艺参数进行建模以预测工件的表面质量并确定最佳切削参数。为了实现对工件表面质量的精确预测, 在三轴数控加工中心上进行了相应的试验。试验基于Box Behnken方法(BBD)进行了四因素和三水平的设计, 减少了试验所需的数目。试验中选择切削深度、切削宽度、切削速度和每齿进给量作为输入参数, 将每次试验所测量的表面粗糙度作为输出参数。最终采用响应面法(Response surface methodology, RSM)建立输入参数和输出参数之间的二次关系, 并进行方差分析(Analysis of variance, ANOVA)以评估所建立的模型。同时, 利用RSM进行优化分析, 确定铣削参数以实现最小表面粗糙度。分析表明, 使用RSM建立铣削参数与表面粗糙度的二次回归模型, 其校正系数为96.16%, 模型能够较好反应输入参数与表面粗糙度的映射关系, 该方法能够提供可靠的用于输入参数限制内任何铣削条件的表面粗糙度预测。经优化分析和试验验证, 所得铣削参数能够获得较小的表面粗糙度, 可应用于实践生产中的工艺优化。
本研究采用端面铣削方式对Ti-6Al-4V ELI(TC4)钛合金进行加工, 结合工艺参数进行建模以预测工件的表面质量并确定最佳切削参数。为了实现对工件表面质量的精确预测, 在三轴数控加工中心上进行了相应的试验。试验基于Box Behnken方法(BBD)进行了四因素和三水平的设计, 减少了试验所需的数目。试验中选择切削深度、切削宽度、切削速度和每齿进给量作为输入参数, 将每次试验所测量的表面粗糙度作为输出参数。最终采用响应面法(Response surface methodology, RSM)建立输入参数和输出参数之间的二次关系, 并进行方差分析(Analysis of variance, ANOVA)以评估所建立的模型。同时, 利用RSM进行优化分析, 确定铣削参数以实现最小表面粗糙度。分析表明, 使用RSM建立铣削参数与表面粗糙度的二次回归模型, 其校正系数为96.16%, 模型能够较好反应输入参数与表面粗糙度的映射关系, 该方法能够提供可靠的用于输入参数限制内任何铣削条件的表面粗糙度预测。经优化分析和试验验证, 所得铣削参数能够获得较小的表面粗糙度, 可应用于实践生产中的工艺优化。

2024, 43(4): 650-659.
doi: 10.13433/j.cnki.1003-8728.20220252
摘要:
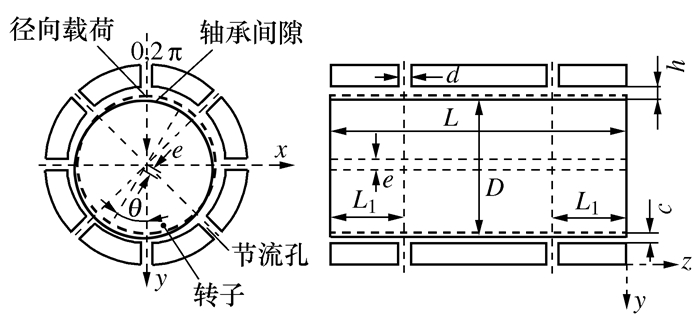
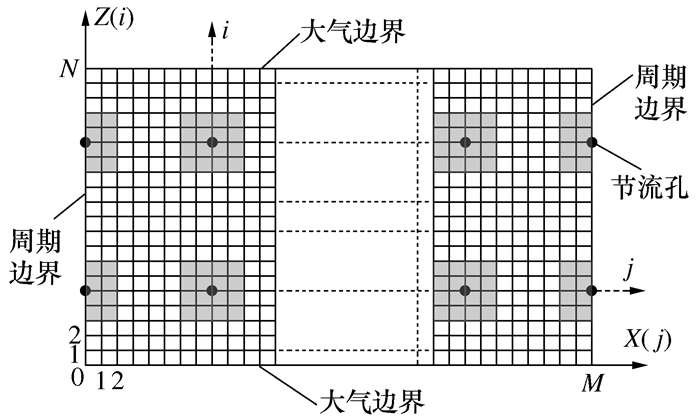
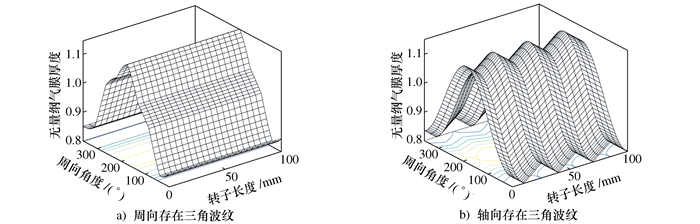
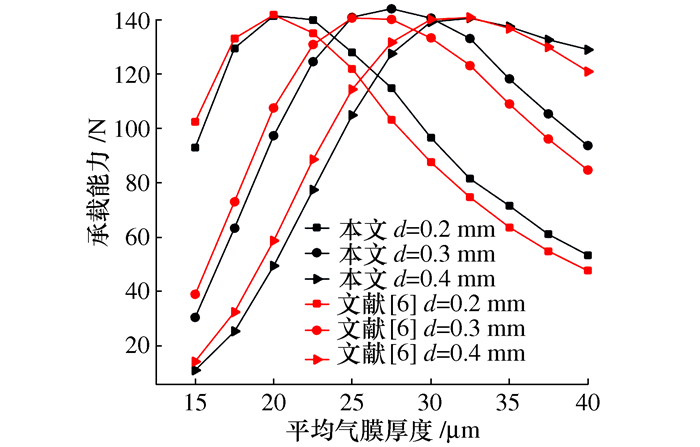
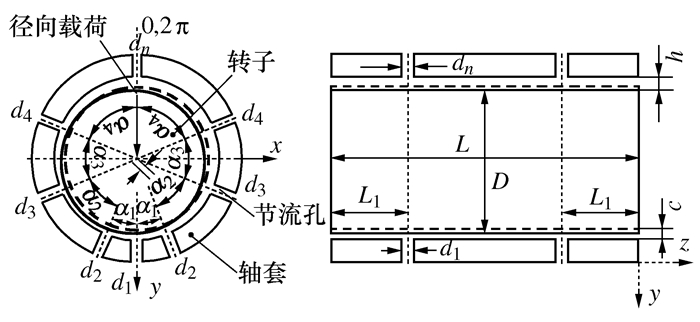
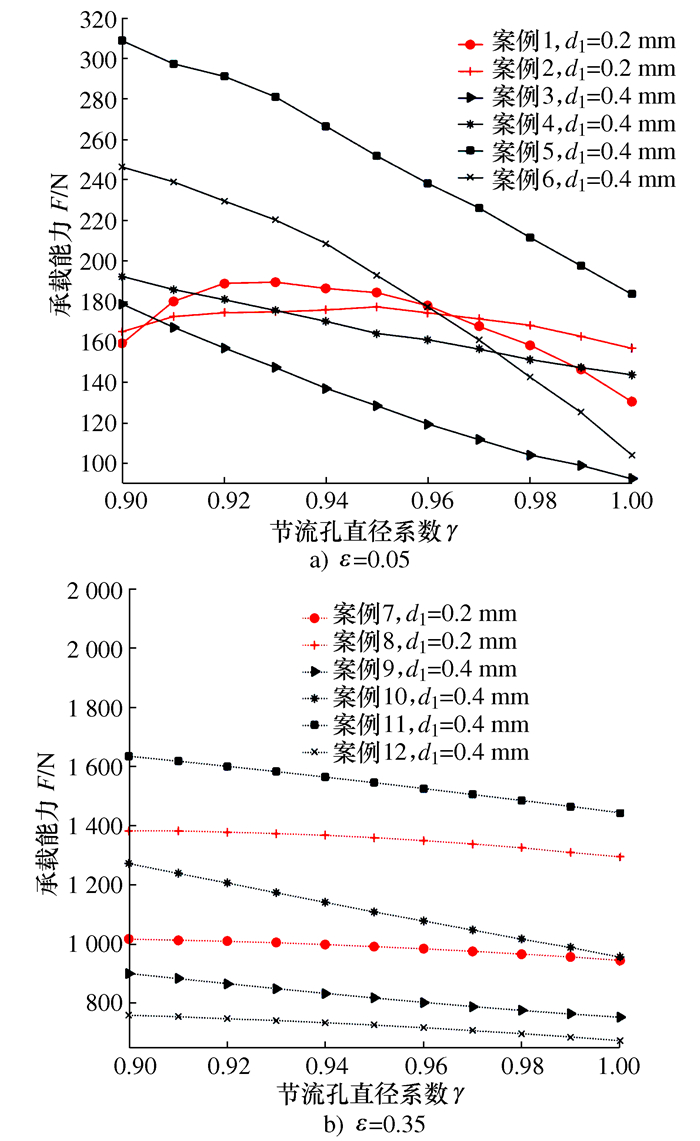
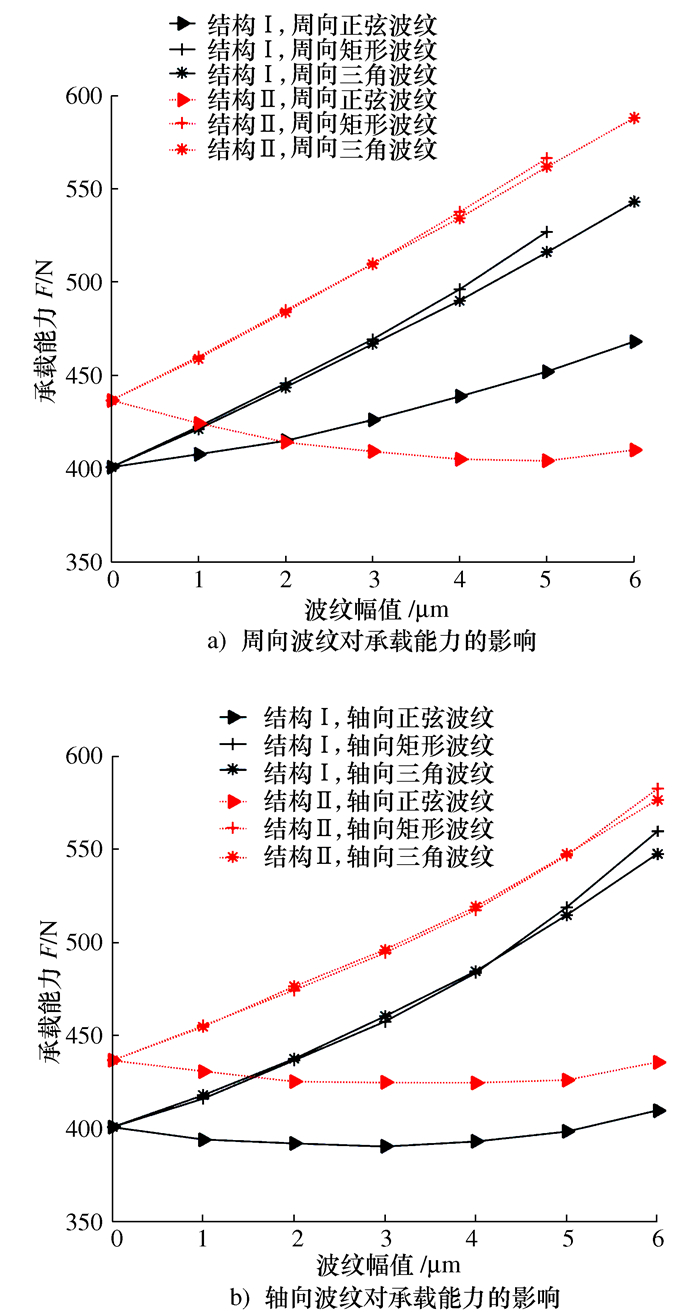
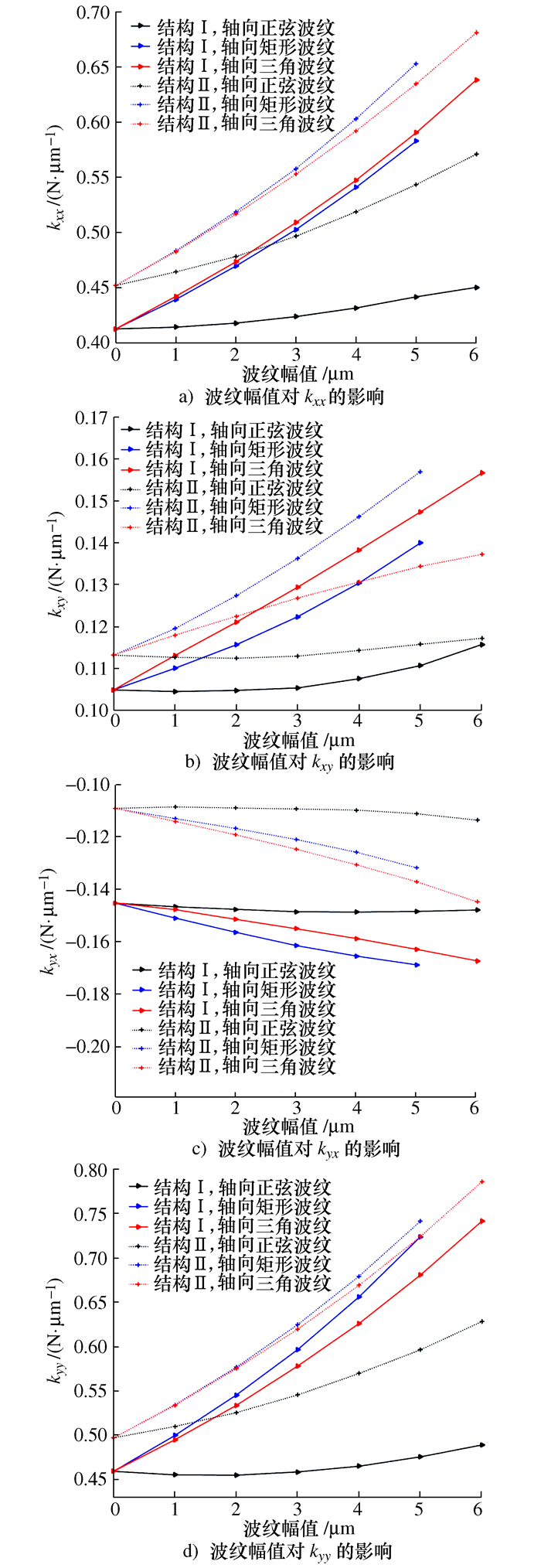
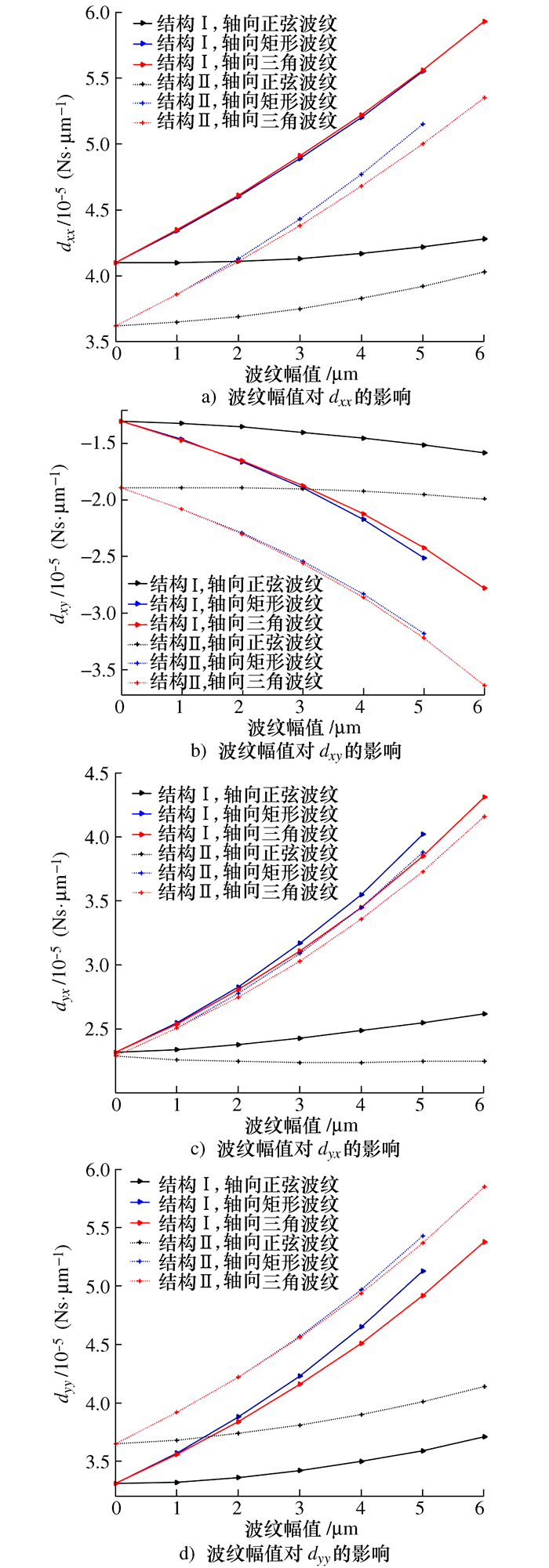
为了改善静压气浮主轴静动态性能, 研究了非均匀分布变节流孔直径静压气浮主轴结构。基于有限差分和线性小扰动法分析节流孔直径和分布不均匀性对主轴承载能力的影响, 研究了轴套存在周向或轴向加工误差(正弦波纹、矩形波纹和三角波纹)对主轴静动态性能的影响。结果表明: 节流孔直径系数为0.9~0.95时, 承载能力提升最明显; 周向或轴向加工误差有助于提高主轴承载能力; 矩形和三角形波纹提高新型主轴承载能力更显著; 轴向矩形波纹、三角波纹更有助于提高主轴稳定性; 随着加工误差幅值增大, 主轴稳定性降低。
为了改善静压气浮主轴静动态性能, 研究了非均匀分布变节流孔直径静压气浮主轴结构。基于有限差分和线性小扰动法分析节流孔直径和分布不均匀性对主轴承载能力的影响, 研究了轴套存在周向或轴向加工误差(正弦波纹、矩形波纹和三角波纹)对主轴静动态性能的影响。结果表明: 节流孔直径系数为0.9~0.95时, 承载能力提升最明显; 周向或轴向加工误差有助于提高主轴承载能力; 矩形和三角形波纹提高新型主轴承载能力更显著; 轴向矩形波纹、三角波纹更有助于提高主轴稳定性; 随着加工误差幅值增大, 主轴稳定性降低。

2024, 43(4): 660-666.
doi: 10.13433/j.cnki.1003-8728.20220260
摘要:
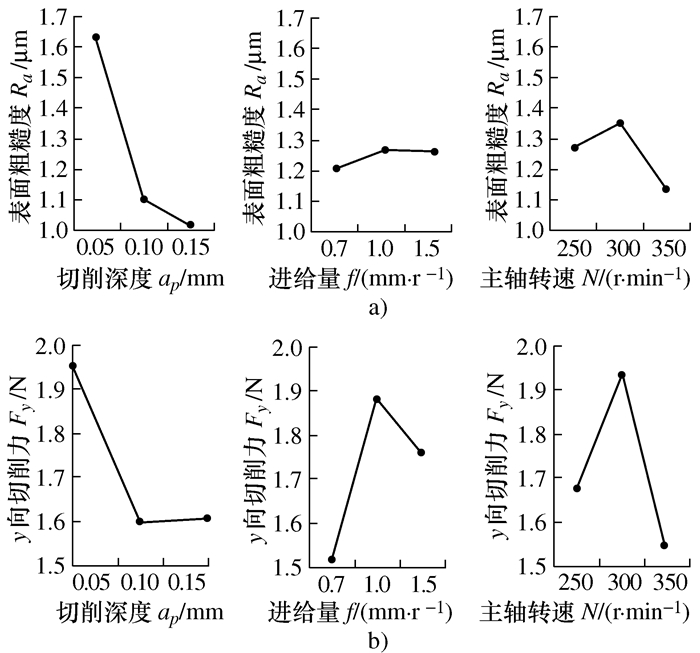
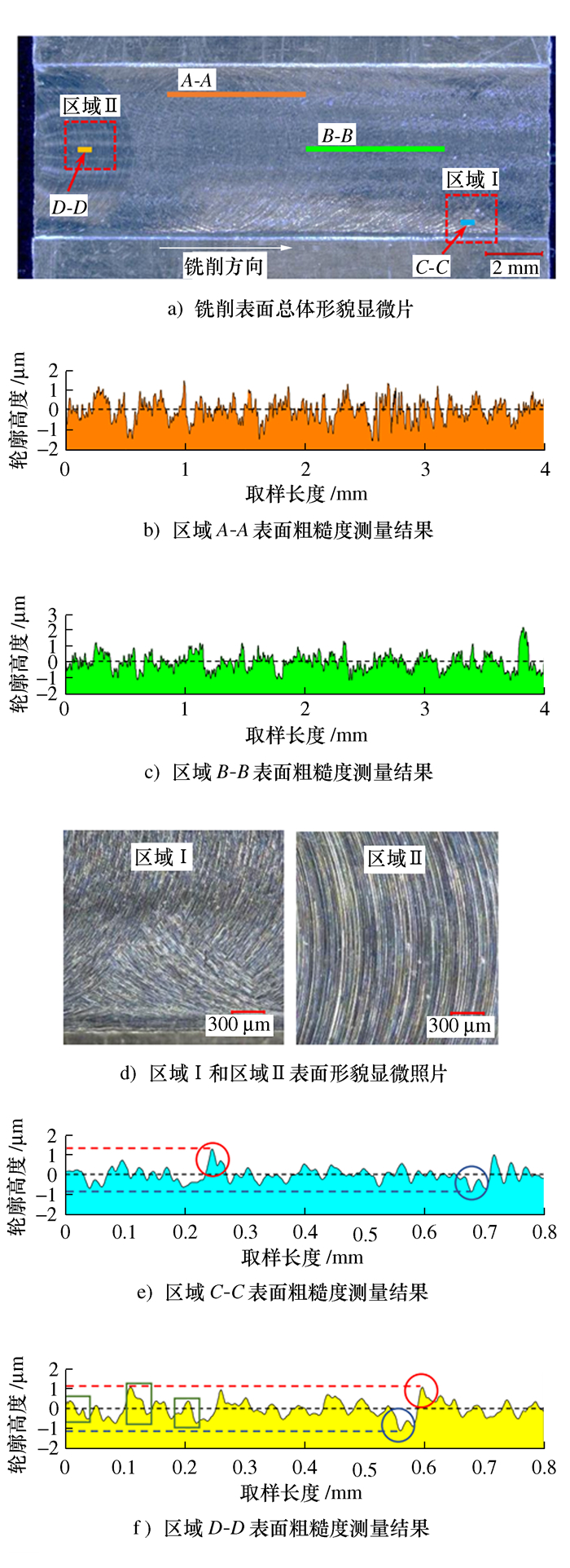
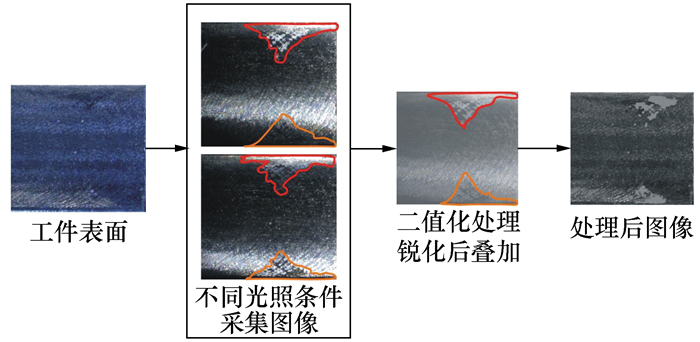
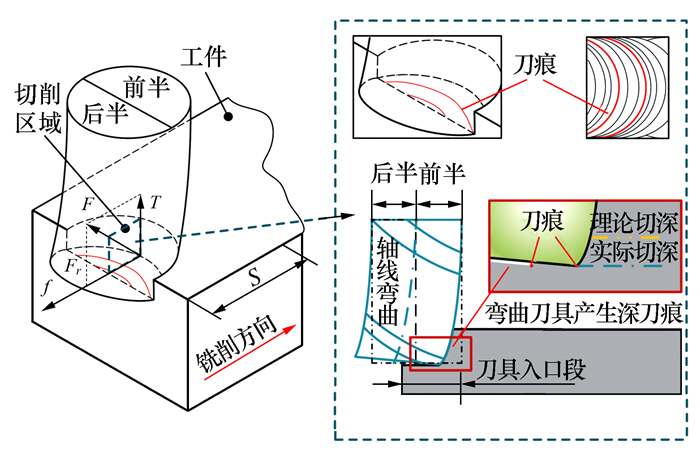
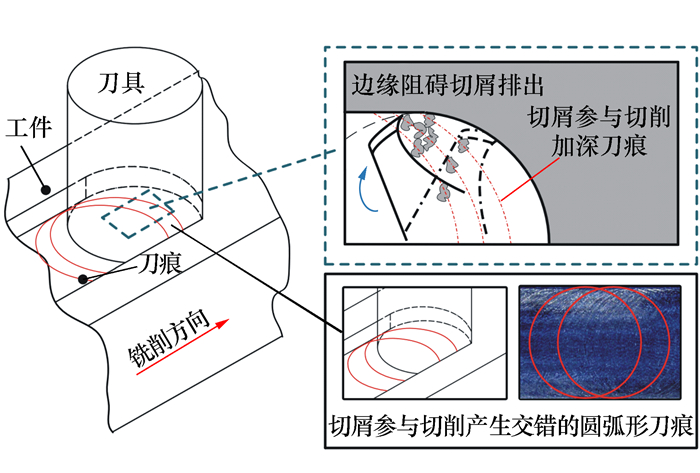
为了探究7050铝合金铣削表面质量的关键影响因素, 寻找最优工艺参数, 对7050铝合金在浇注冷却条件下进行了正交试验, 建立了表面粗糙度与切削深度、主轴转速之间的回归模型, 分析了加工过程中刀具-工件相对接触状态不同时所产生的刀痕差异。结果表明: 切削深度对表面粗糙度的影响最大, 主轴转速其次, 进给量的影响最小; 刀痕的表现形式与刀具-工件相对接触状态存在直接联系, 刀具切入工件位置主要受切削深度的影响产生单向圆弧状刀痕, 刀具完全进入铣削工件后则会形成交错的圆弧状刀痕, 在刀具离开工件位置主要受进给量影响产生较浅刀痕。
为了探究7050铝合金铣削表面质量的关键影响因素, 寻找最优工艺参数, 对7050铝合金在浇注冷却条件下进行了正交试验, 建立了表面粗糙度与切削深度、主轴转速之间的回归模型, 分析了加工过程中刀具-工件相对接触状态不同时所产生的刀痕差异。结果表明: 切削深度对表面粗糙度的影响最大, 主轴转速其次, 进给量的影响最小; 刀痕的表现形式与刀具-工件相对接触状态存在直接联系, 刀具切入工件位置主要受切削深度的影响产生单向圆弧状刀痕, 刀具完全进入铣削工件后则会形成交错的圆弧状刀痕, 在刀具离开工件位置主要受进给量影响产生较浅刀痕。


2024, 43(4): 667-673.
doi: 10.13433/j.cnki.1003-8728.20220269
摘要:
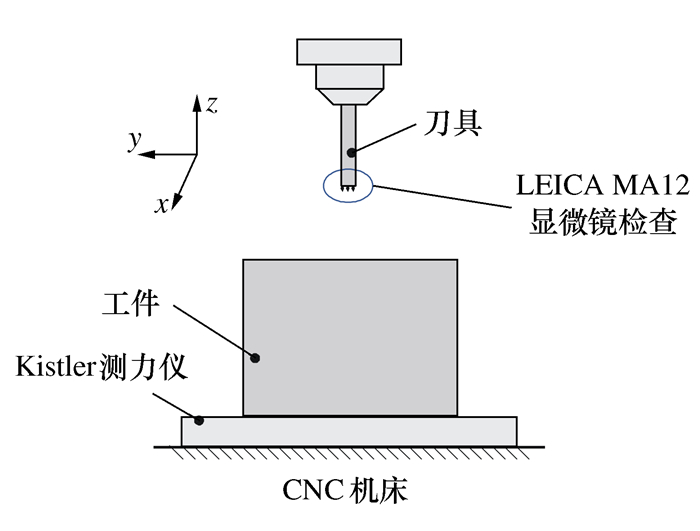
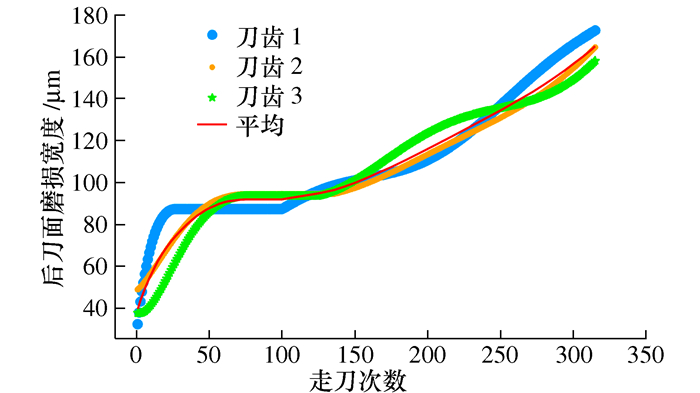
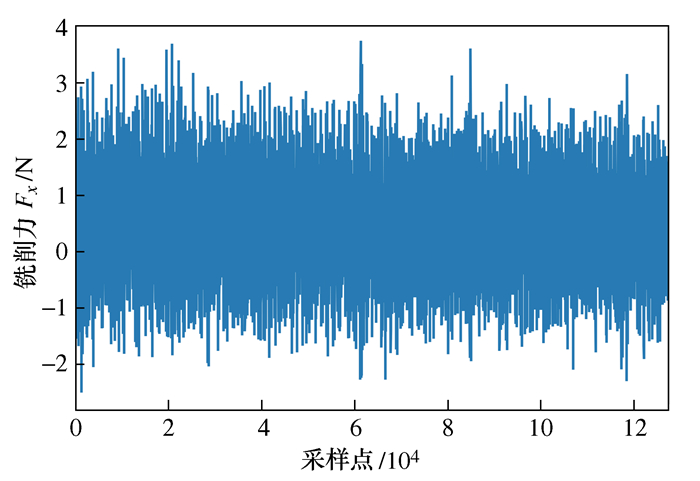
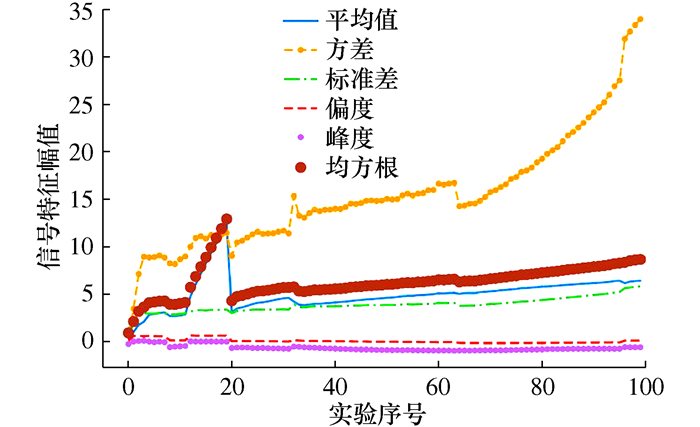
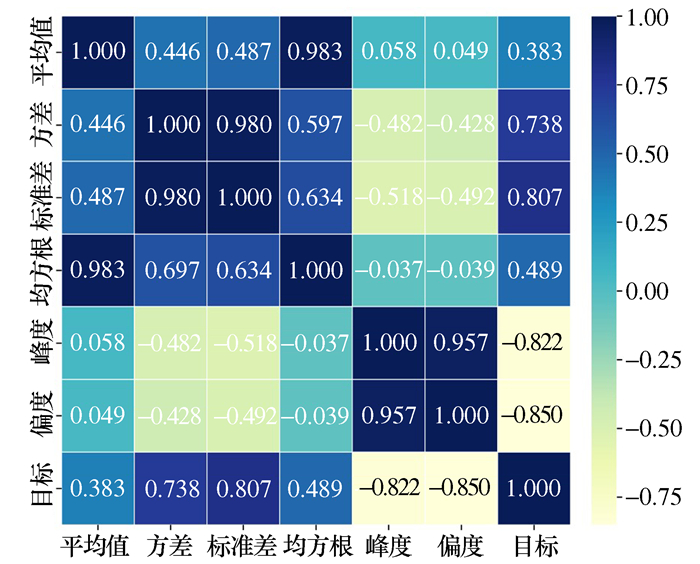
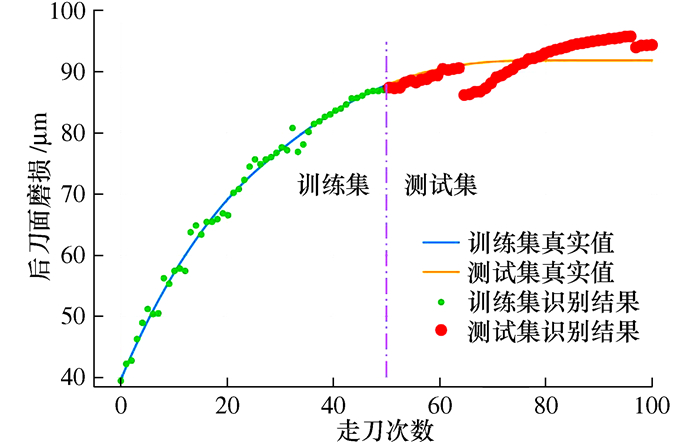
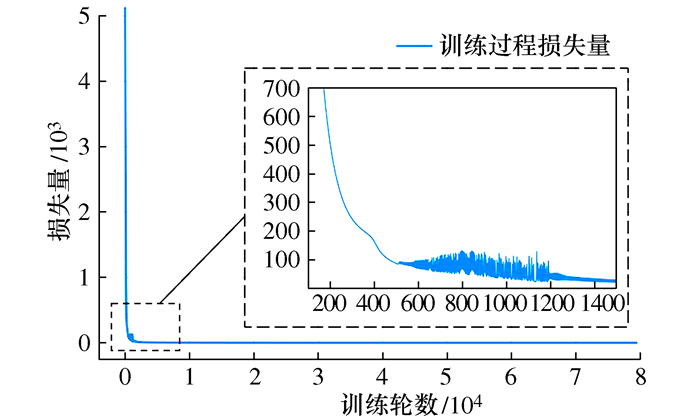
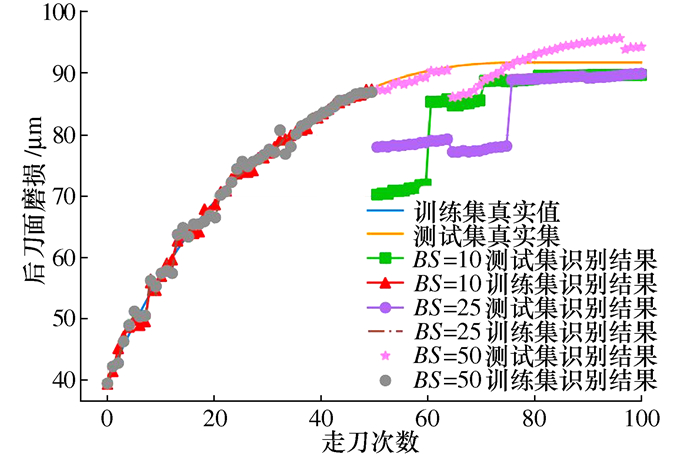
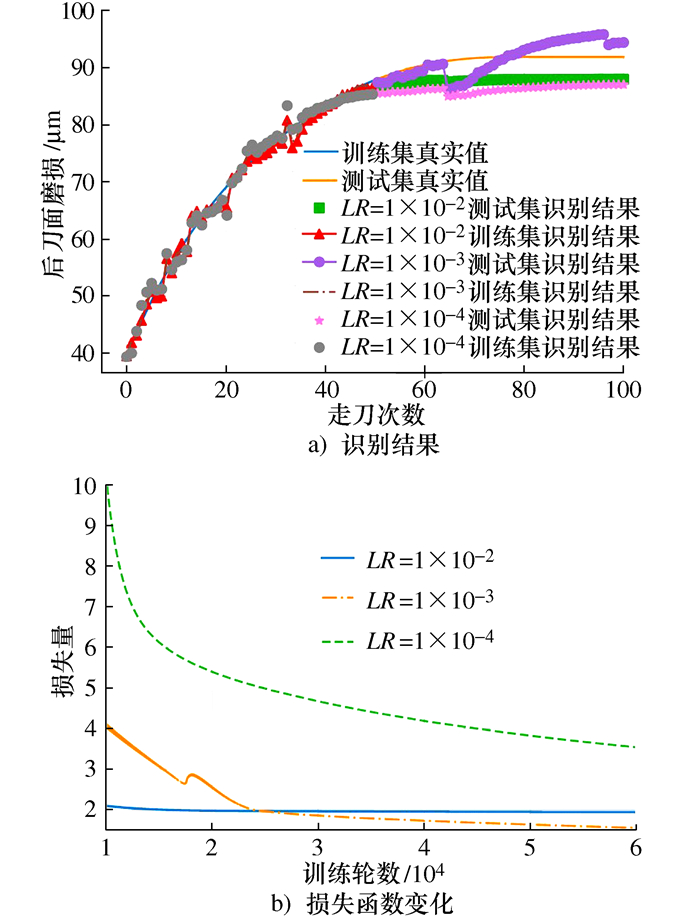
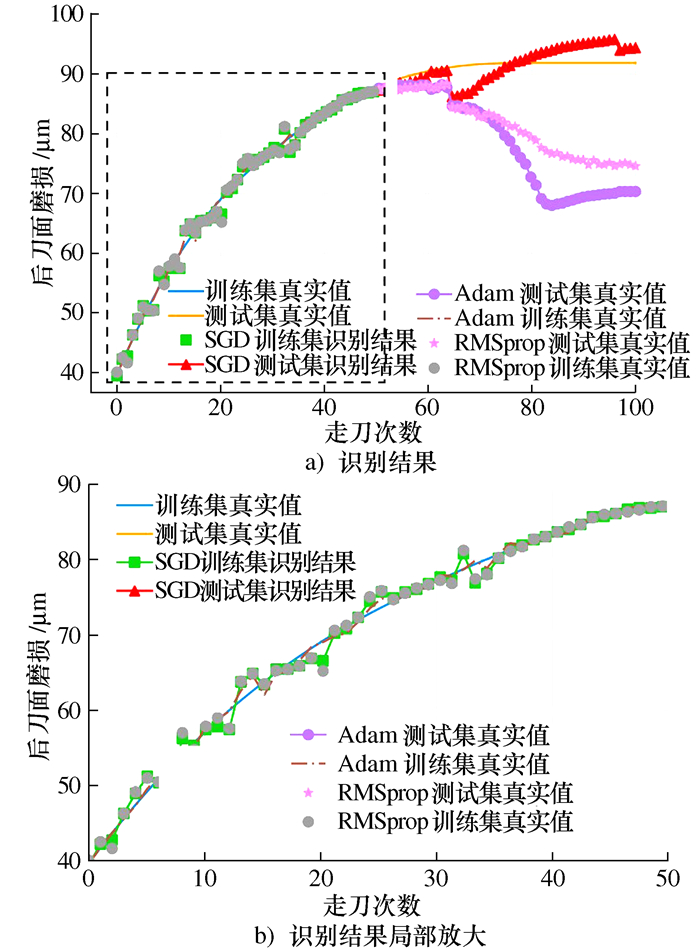
为实现汽车发动机缸盖生产中刀具磨损状态的监测,提高刀具磨损监测方法的计算效率和识别精度,基于门控循环单元神经网络和多特征融合方法提出了面向铣刀后刀面磨损带宽度识别的刀具状态监测方法。通过铣削力信号数据对所提出方法的有效性进行了验证,分析了不同超参数设置对模型识别精度的影响机制,给出了最优超参数,实现了对铣削刀具磨损的精确识别。
为实现汽车发动机缸盖生产中刀具磨损状态的监测,提高刀具磨损监测方法的计算效率和识别精度,基于门控循环单元神经网络和多特征融合方法提出了面向铣刀后刀面磨损带宽度识别的刀具状态监测方法。通过铣削力信号数据对所提出方法的有效性进行了验证,分析了不同超参数设置对模型识别精度的影响机制,给出了最优超参数,实现了对铣削刀具磨损的精确识别。
2024, 43(4): 674-680.
doi: 10.13433/j.cnki.1003-8728.20220257
摘要:
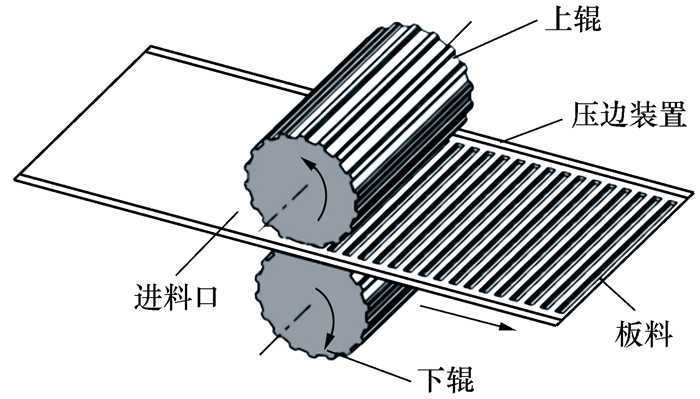
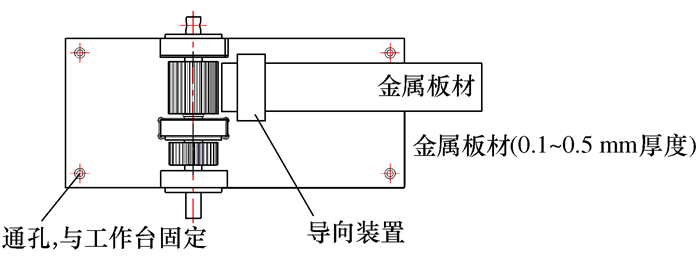
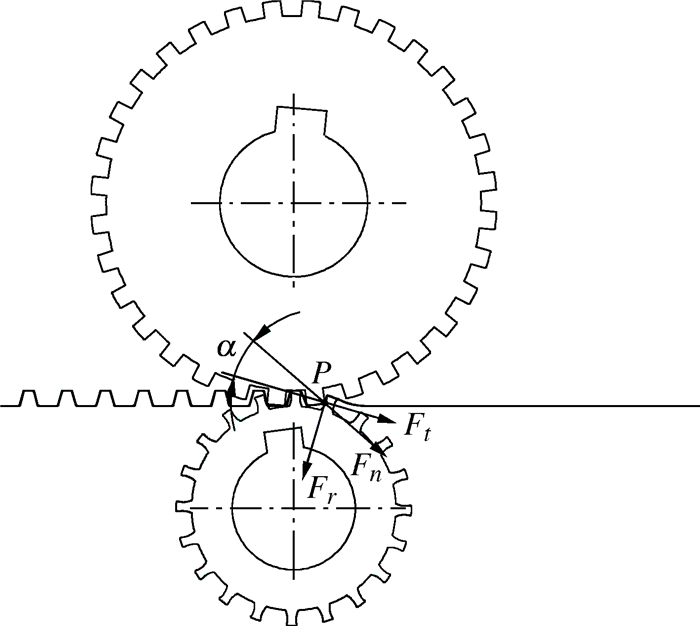
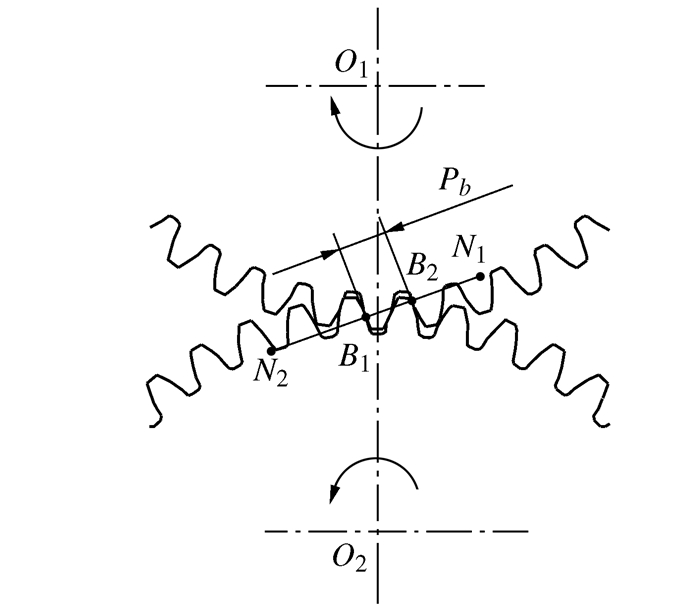
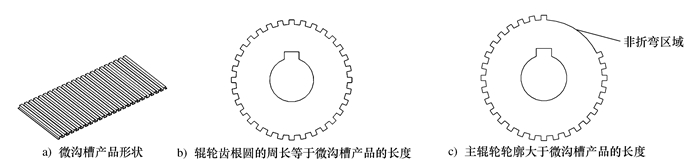
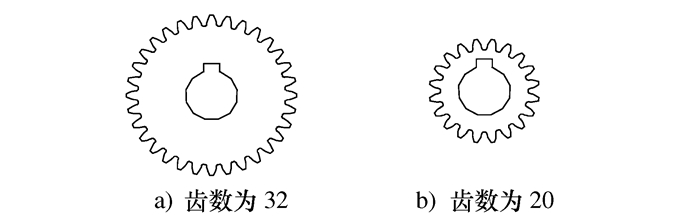
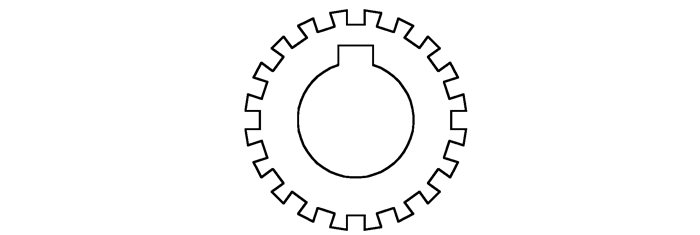
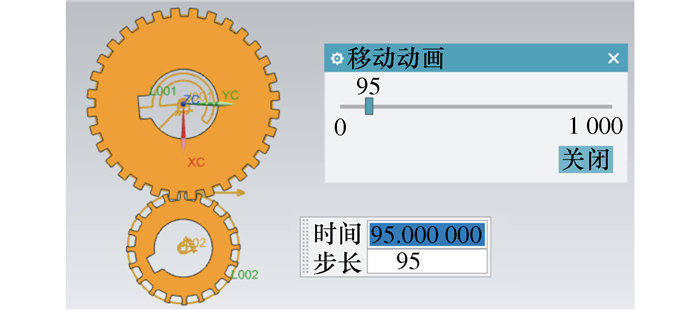
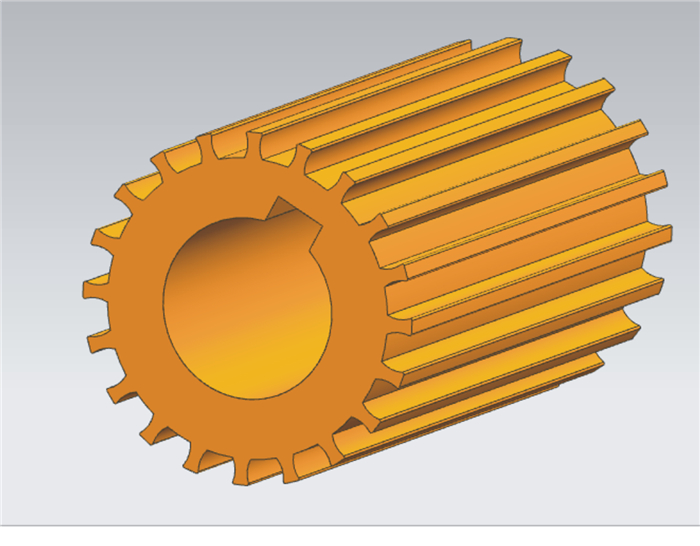
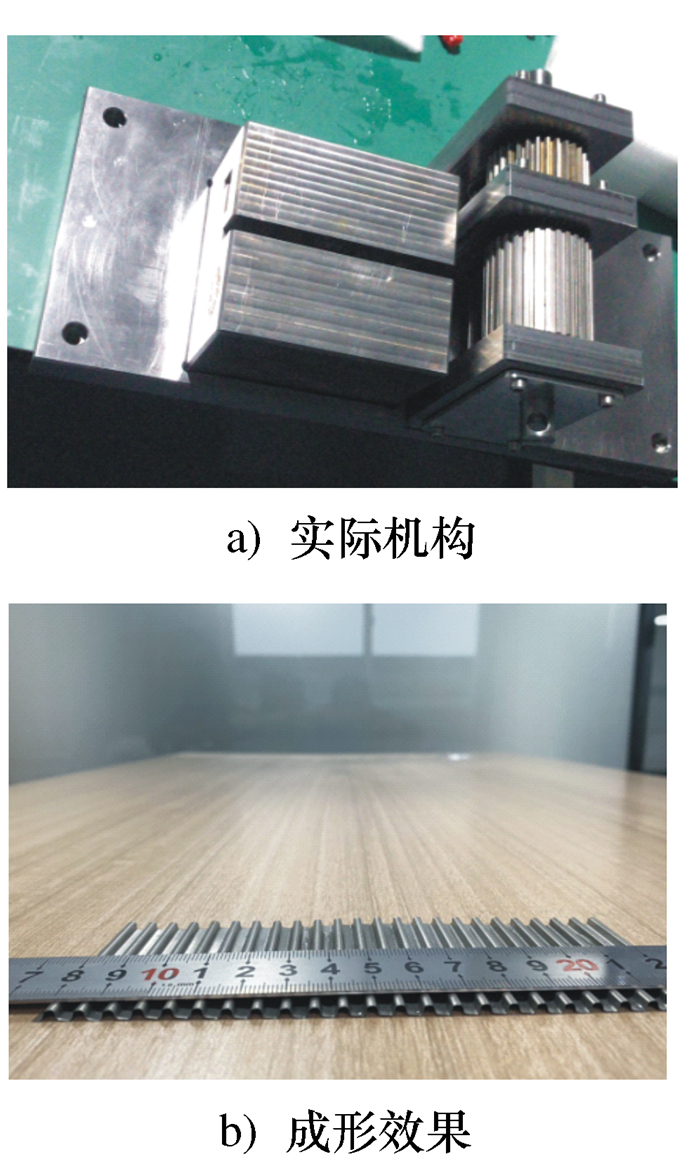
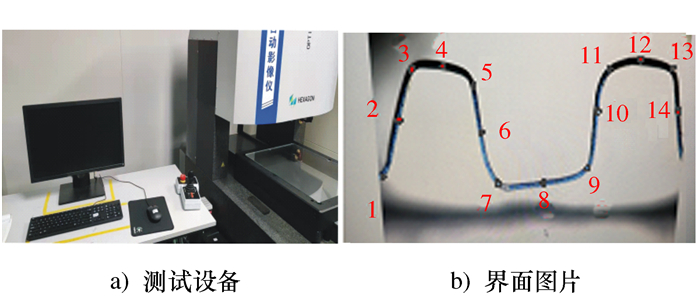
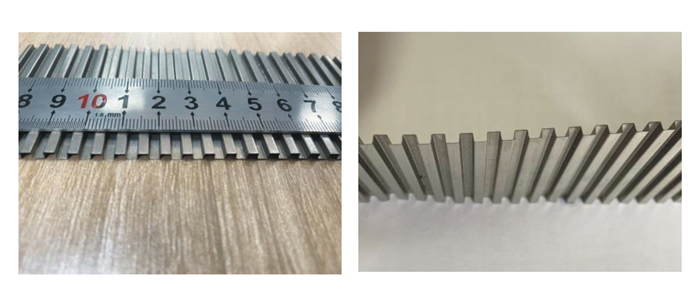
提出一种新型的辊压成形的工艺, 对主辅成形辊轮的轮廓设计提出新的设计思路, 并对0.1 mm的厚度TA1钛板微沟槽(深度2.5 mm, 深宽比86.2%)进行辊压成形的试验, 将最大减薄率、最大深度偏差作为评价指标, 验证工艺的合理性与科学性。结果表明: 辅助成形辊轮在满足挠度(<0.02 mm)的前提下, 应尽可能减少辅助成形辊轮的特征数, 使其在辊压过程中板材折弯变形而非拉延, 其最大减薄率为小于0.4%, 深度偏度小于0.5%, 配合冲压模具可以对大深宽比的微沟槽成形, 而不受拔模角度的影响, 此新型成形工艺可以促进金属板材微沟槽产品的产业化。
提出一种新型的辊压成形的工艺, 对主辅成形辊轮的轮廓设计提出新的设计思路, 并对0.1 mm的厚度TA1钛板微沟槽(深度2.5 mm, 深宽比86.2%)进行辊压成形的试验, 将最大减薄率、最大深度偏差作为评价指标, 验证工艺的合理性与科学性。结果表明: 辅助成形辊轮在满足挠度(<0.02 mm)的前提下, 应尽可能减少辅助成形辊轮的特征数, 使其在辊压过程中板材折弯变形而非拉延, 其最大减薄率为小于0.4%, 深度偏度小于0.5%, 配合冲压模具可以对大深宽比的微沟槽成形, 而不受拔模角度的影响, 此新型成形工艺可以促进金属板材微沟槽产品的产业化。

2024, 43(4): 681-689.
doi: 10.13433/j.cnki.1003-8728.20220273
摘要:
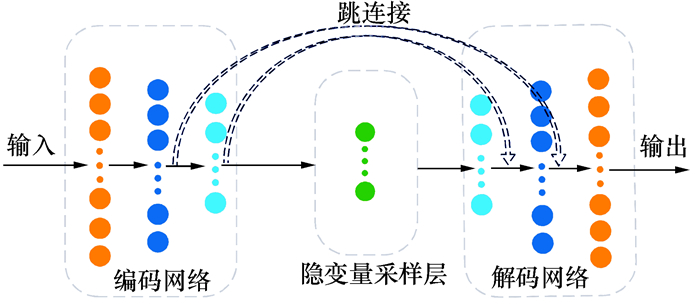
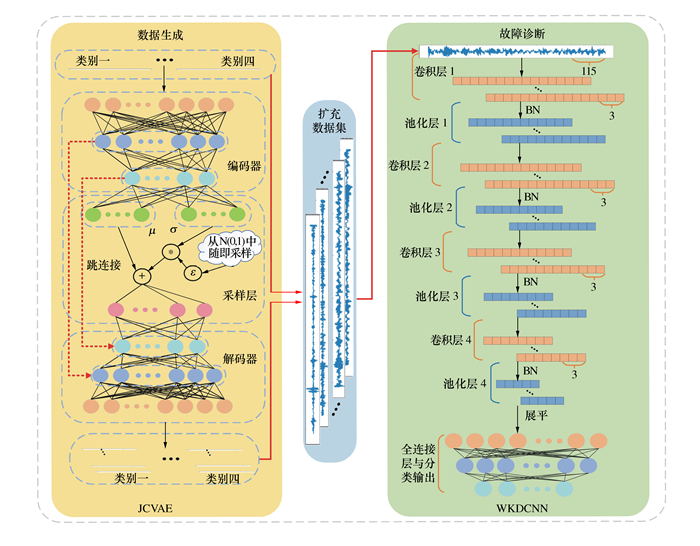
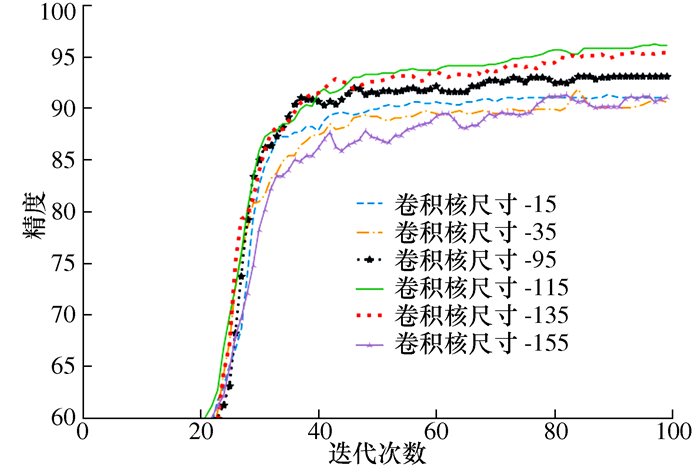
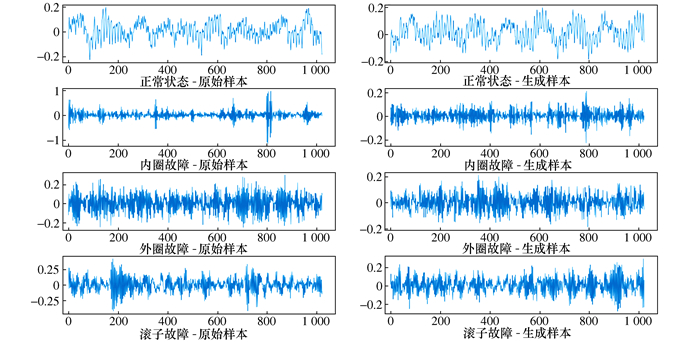
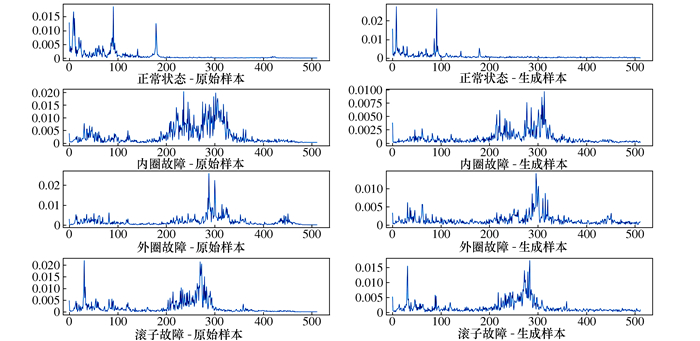
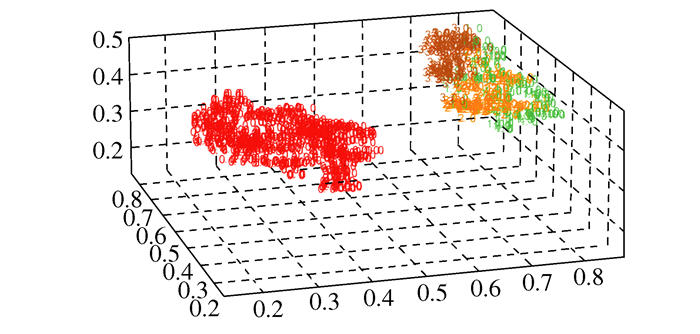
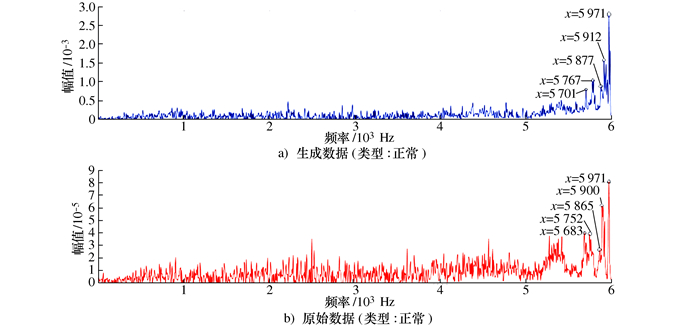
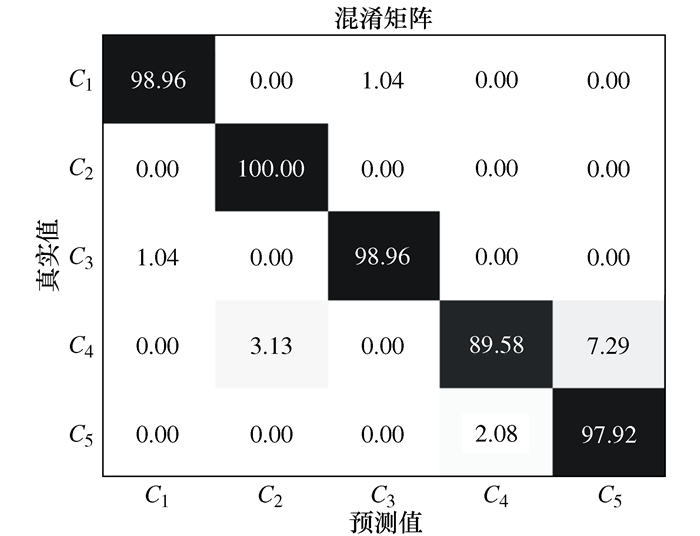
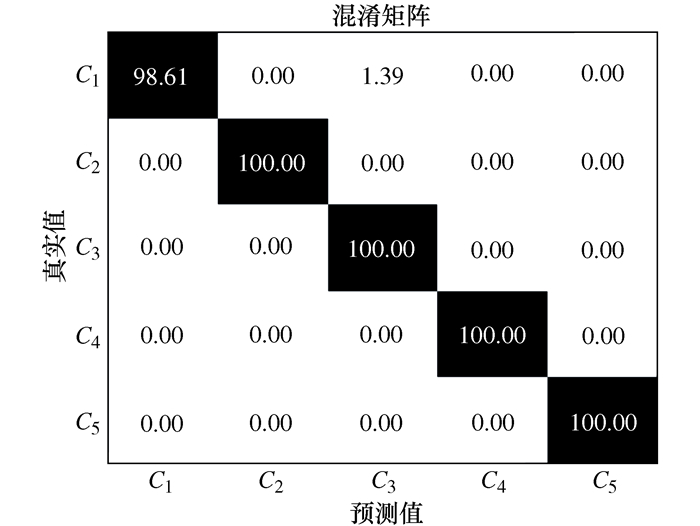
针对滚动轴承故障率小、不易收集故障数据的问题, 提出基于跳跃连接变分自编码器与宽核深度卷积神经网络相结合的小样本故障诊断方法。该方法首先在变分自编码器的编码和解码之间引入跳跃连接结构, 并将Tanh作为网络的激活函数, 进而提高生成样本的特征多样性; 其次, 构建宽核深度卷积网络诊断模型, 该模型可以提高从振动信号中提取故障特征的能力; 最后, 经生成样本扩充的数据集作为模型输入, 提高训练集包含的特征信息量, 实现小样本下的故障诊断。实验分析表明, 所提方法在小样本情形下能生成有效的伪样本并具有较高的诊断精度。
针对滚动轴承故障率小、不易收集故障数据的问题, 提出基于跳跃连接变分自编码器与宽核深度卷积神经网络相结合的小样本故障诊断方法。该方法首先在变分自编码器的编码和解码之间引入跳跃连接结构, 并将Tanh作为网络的激活函数, 进而提高生成样本的特征多样性; 其次, 构建宽核深度卷积网络诊断模型, 该模型可以提高从振动信号中提取故障特征的能力; 最后, 经生成样本扩充的数据集作为模型输入, 提高训练集包含的特征信息量, 实现小样本下的故障诊断。实验分析表明, 所提方法在小样本情形下能生成有效的伪样本并具有较高的诊断精度。


2024, 43(4): 690-697.
doi: 10.13433/j.cnki.1003-8728.20220264
摘要:
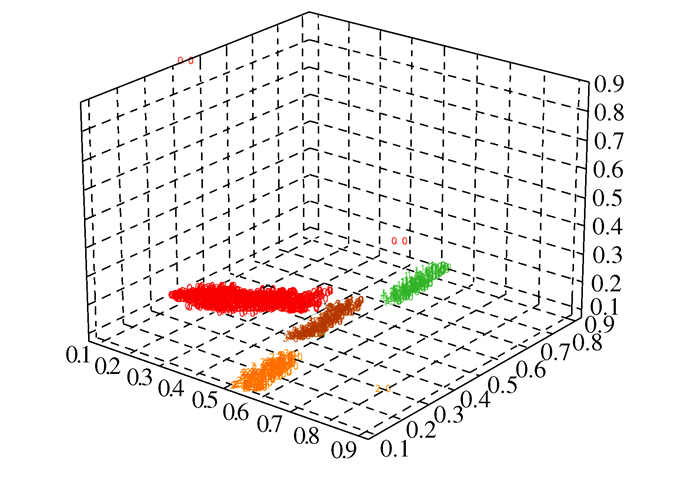
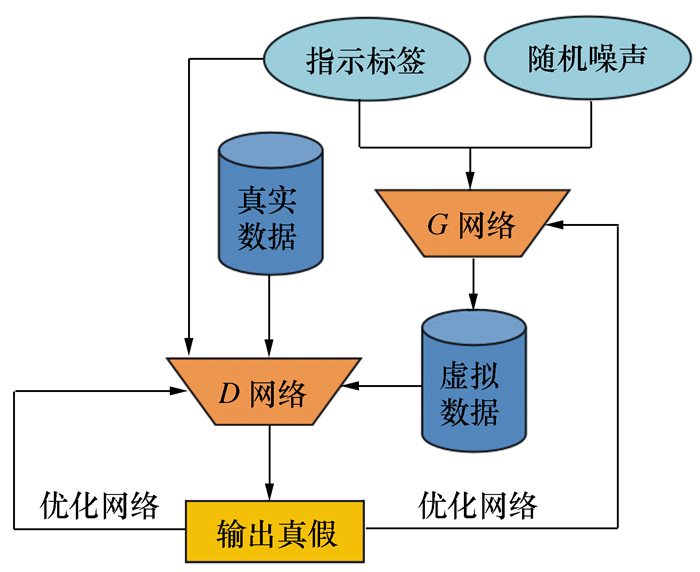
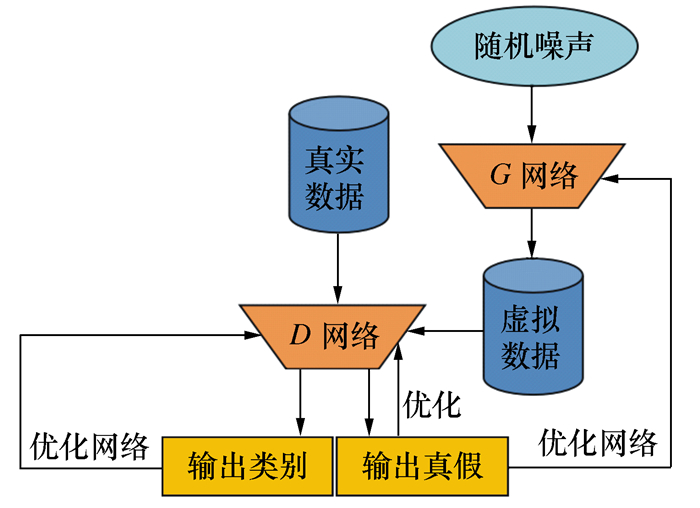
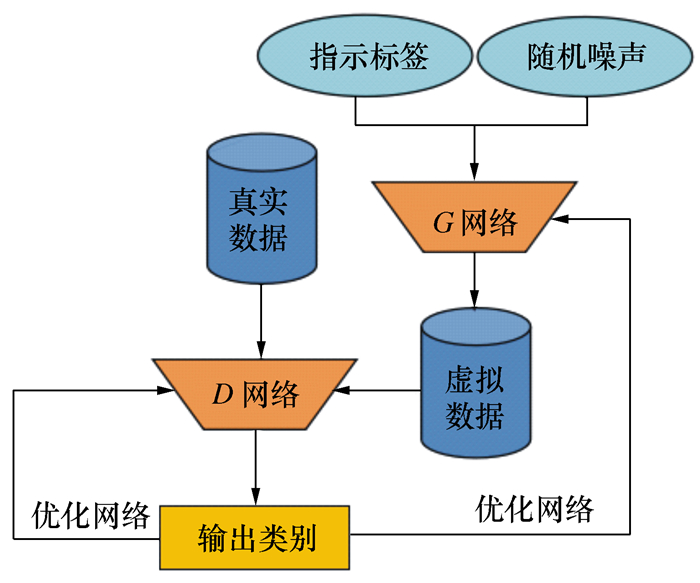
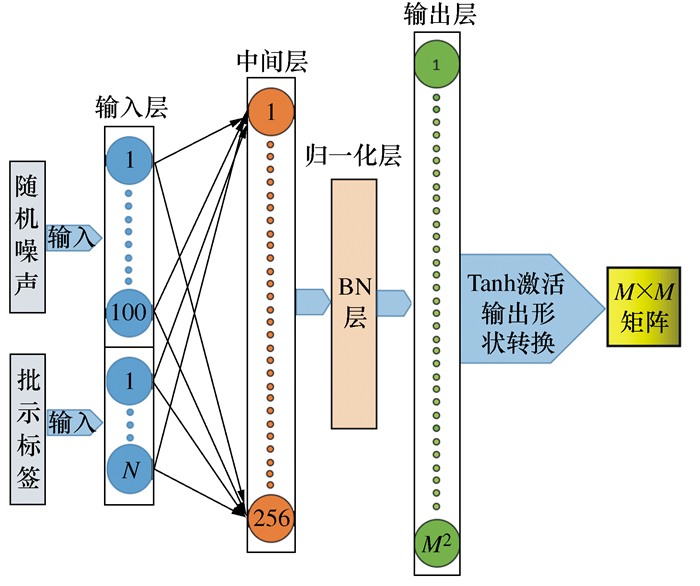
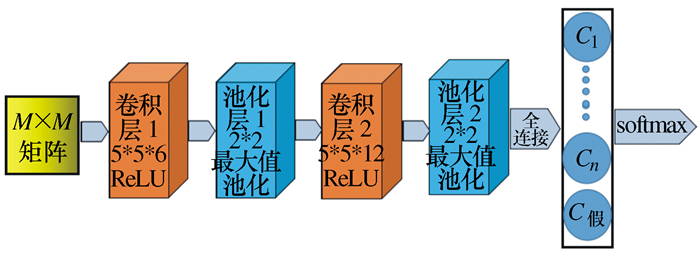
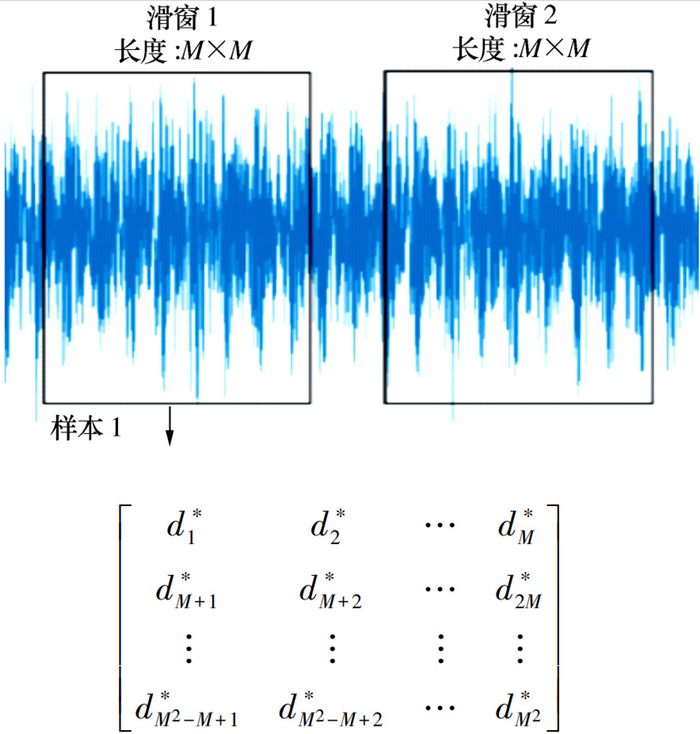
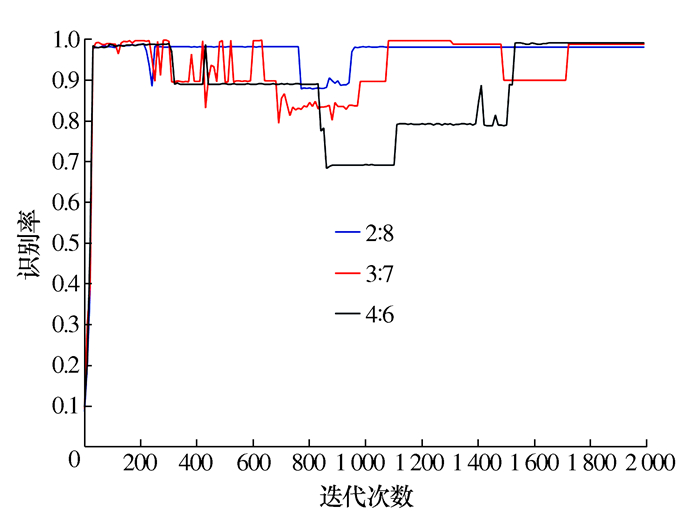
针对条件对抗神经网络(CGAN)只能进行真假不能进行分类判别和半监督对抗神经网络(SGAN)需要同时进行分类和真假判别的缺点, 提出了一种改进对抗神经网络CSGAN模型, 并给出了具体设计。该对抗网络的生成器G以CGAN为基础, 由多层感知机(MLP)构成; 判别器D以SGAN为基础, 由卷积神经网络(CNN)构成。基于CSGAN, 还提出了一种二维对抗神经网络轴承故障诊断方法, 该方法首先将原始故障信号归一化到[-1, 1]区间, 然后利用一个滑窗从归一化数据中截取1024长度的数据, 并转换构成32×32尺寸的二维矩阵作为CSGAN的输入。经多个公开数据集验证表明, 这一诊断方法在不同样本比例的情况下都能有效提高判别器的诊断精度, 具有良好的适用性。
针对条件对抗神经网络(CGAN)只能进行真假不能进行分类判别和半监督对抗神经网络(SGAN)需要同时进行分类和真假判别的缺点, 提出了一种改进对抗神经网络CSGAN模型, 并给出了具体设计。该对抗网络的生成器G以CGAN为基础, 由多层感知机(MLP)构成; 判别器D以SGAN为基础, 由卷积神经网络(CNN)构成。基于CSGAN, 还提出了一种二维对抗神经网络轴承故障诊断方法, 该方法首先将原始故障信号归一化到[-1, 1]区间, 然后利用一个滑窗从归一化数据中截取1024长度的数据, 并转换构成32×32尺寸的二维矩阵作为CSGAN的输入。经多个公开数据集验证表明, 这一诊断方法在不同样本比例的情况下都能有效提高判别器的诊断精度, 具有良好的适用性。


2024, 43(4): 698-703.
doi: 10.13433/j.cnki.1003-8728.20220247
摘要:
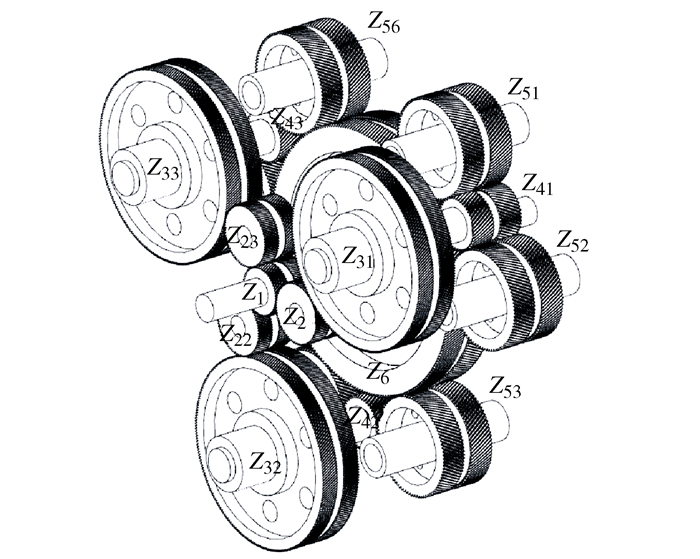
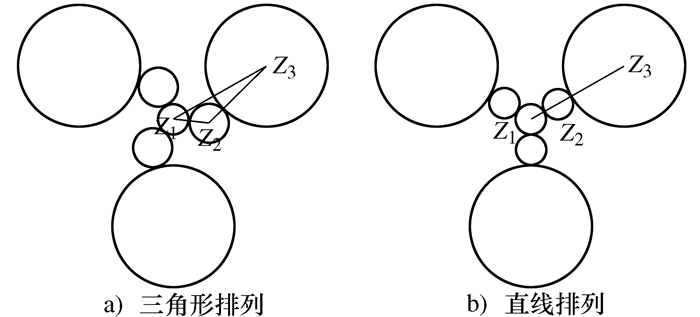
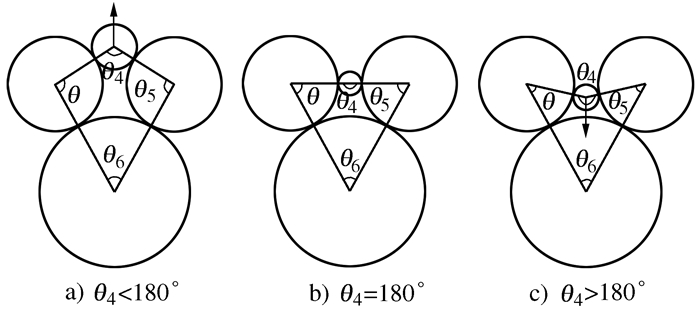
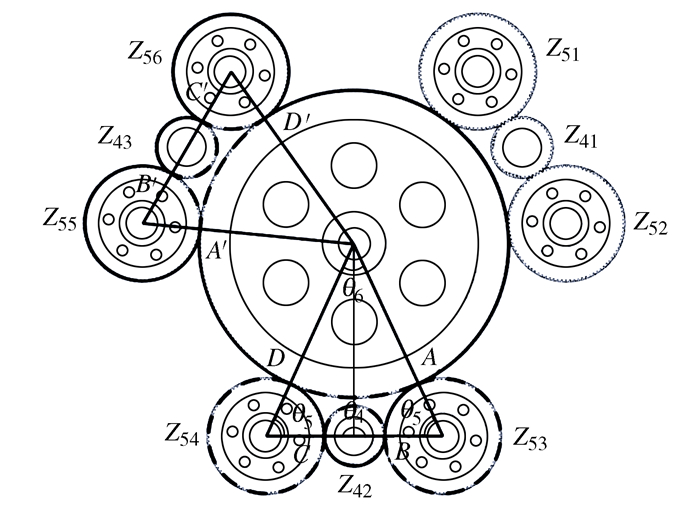
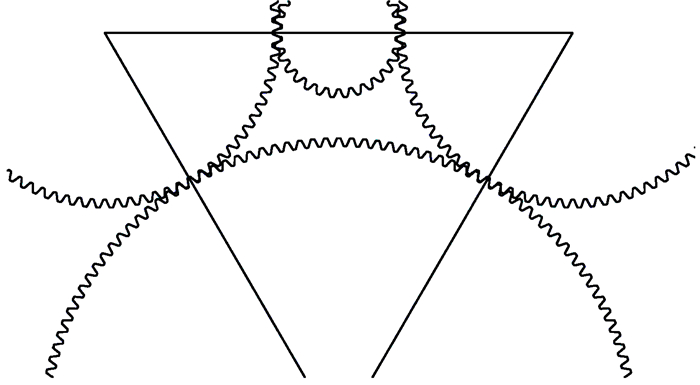
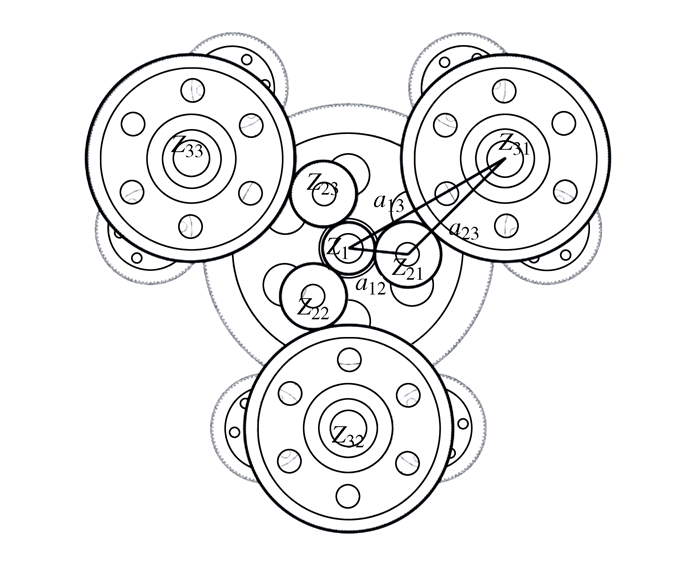
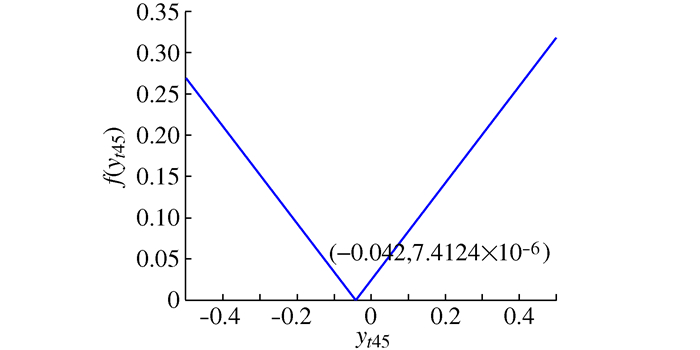
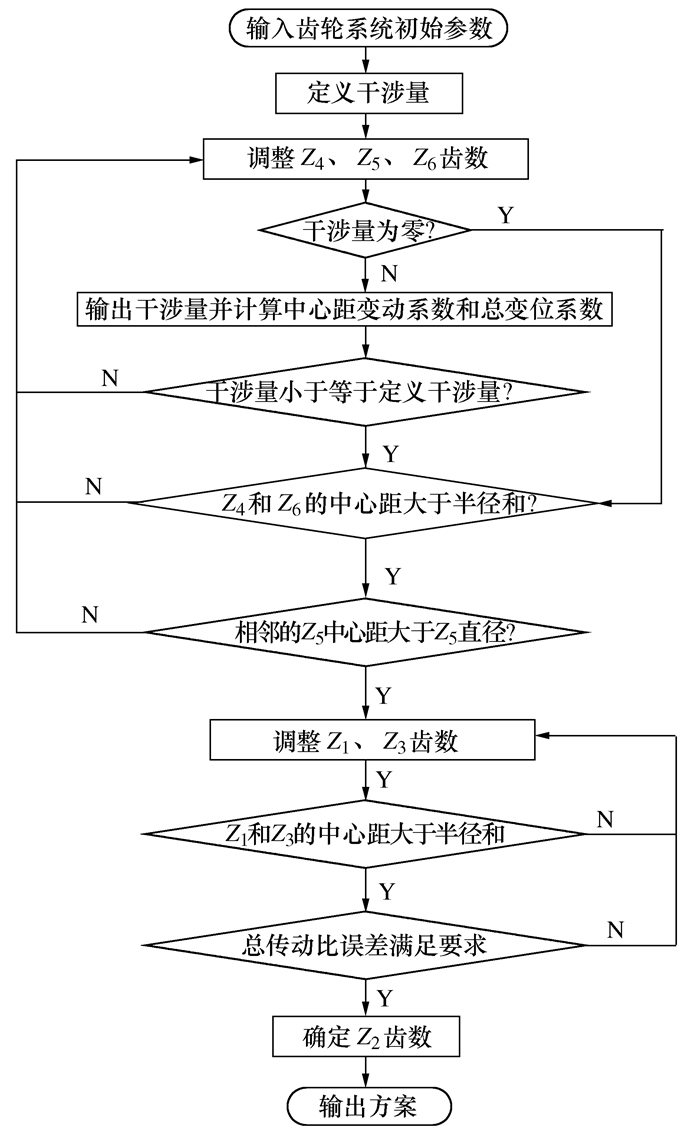
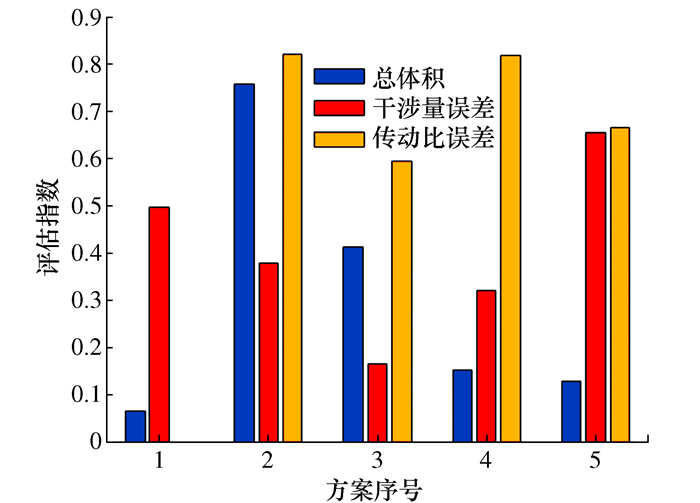
功率分流传动系统具有承载能力强、传动比大、结构紧凑等优点, 已被广泛应用于大功率动力传输。在各支路齿轮配齿时, 考虑邻接条件和传动比条件, 且避免齿轮发生碰撞的前提下, 消除各对齿轮啮合时产生的干涉已成为该系统设计时需考虑的关键问题之一。本文在功率六分支同轴传动构型设计基础上, 提出了一种更容易判断4个齿轮啮合是否产生干涉的判断条件, 并将其与变位齿轮结合, 建立了六分支人字齿轮配齿方法, 该方法不仅可快速计算出使齿轮啮合不产生干涉的变位系数, 而且还可以得出满足传动比要求和干涉量误差的多组方案。算例结果表明, 该方法得到的齿轮参数满足各项要求, 为某舰船动力系统中的六分支人字齿轮传动系统的设计提供了实用的方法和理论依据。
功率分流传动系统具有承载能力强、传动比大、结构紧凑等优点, 已被广泛应用于大功率动力传输。在各支路齿轮配齿时, 考虑邻接条件和传动比条件, 且避免齿轮发生碰撞的前提下, 消除各对齿轮啮合时产生的干涉已成为该系统设计时需考虑的关键问题之一。本文在功率六分支同轴传动构型设计基础上, 提出了一种更容易判断4个齿轮啮合是否产生干涉的判断条件, 并将其与变位齿轮结合, 建立了六分支人字齿轮配齿方法, 该方法不仅可快速计算出使齿轮啮合不产生干涉的变位系数, 而且还可以得出满足传动比要求和干涉量误差的多组方案。算例结果表明, 该方法得到的齿轮参数满足各项要求, 为某舰船动力系统中的六分支人字齿轮传动系统的设计提供了实用的方法和理论依据。

2024, 43(4): 704-710.
doi: 10.13433/j.cnki.1003-8728.20220256
摘要:
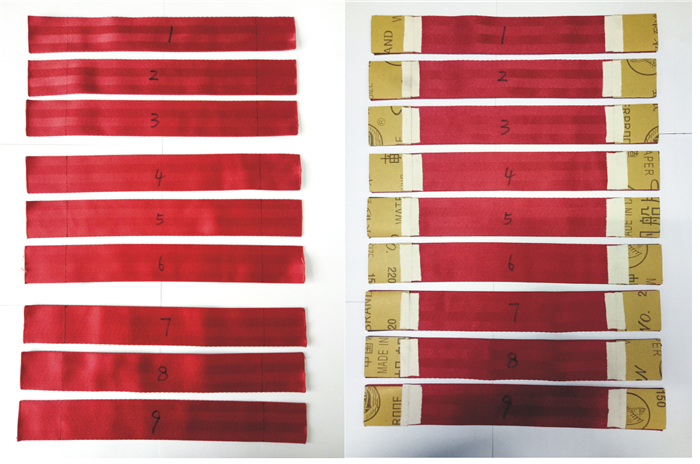
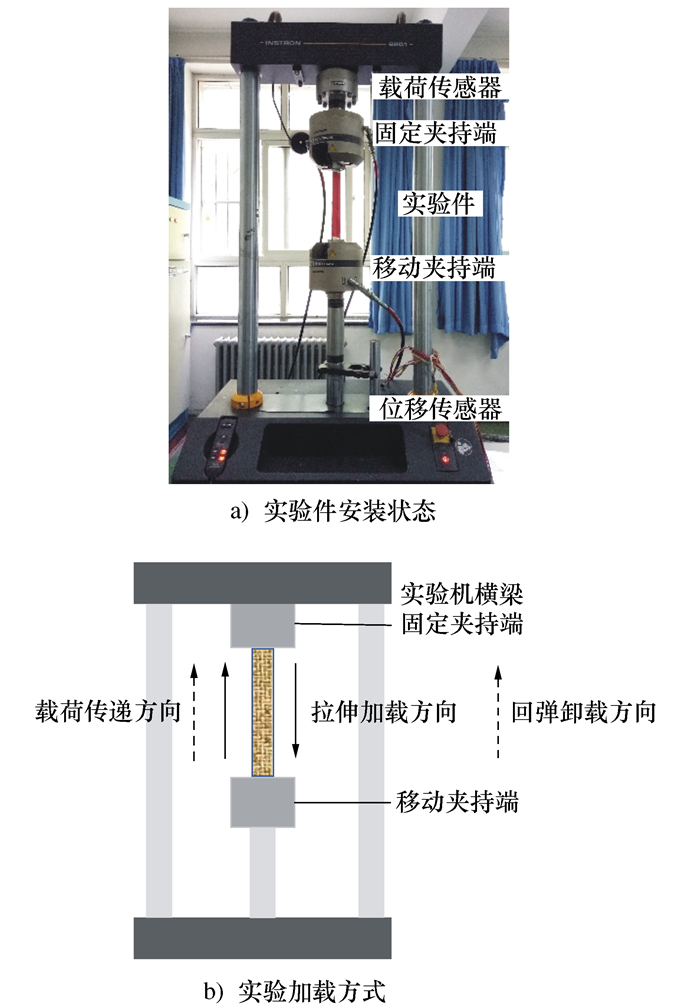
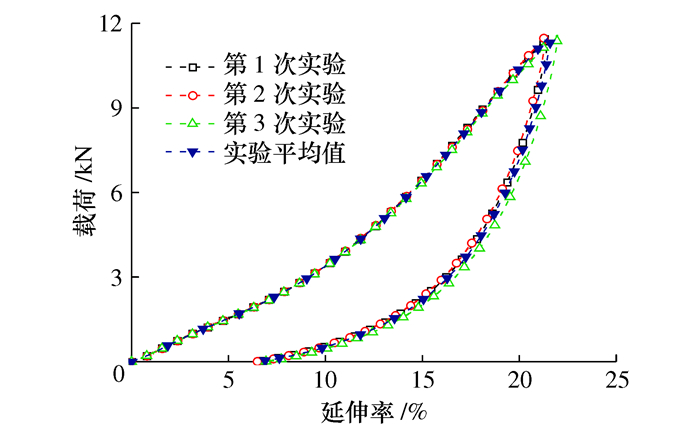
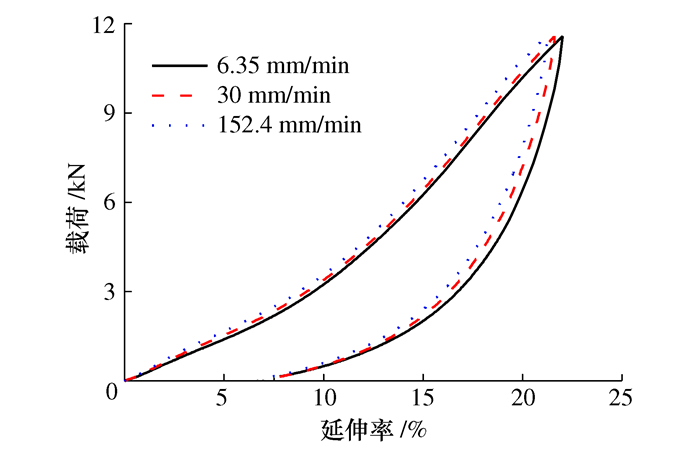
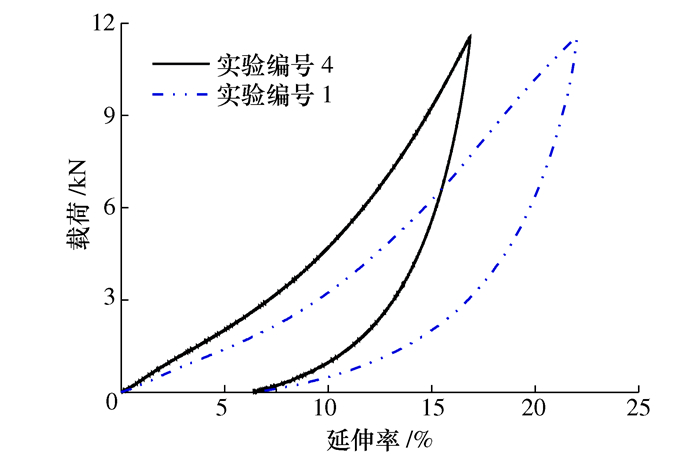
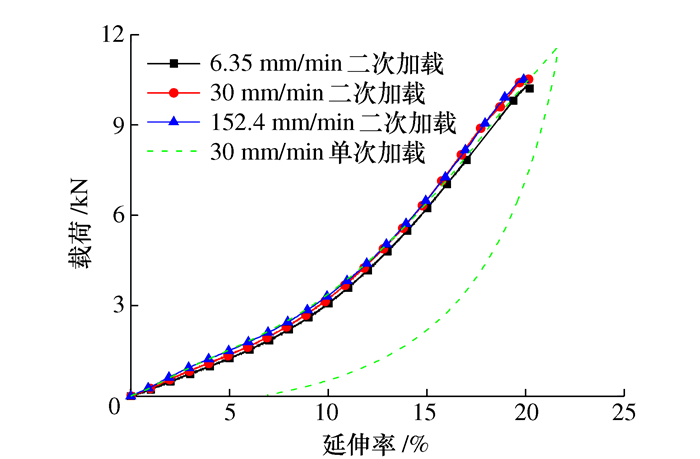
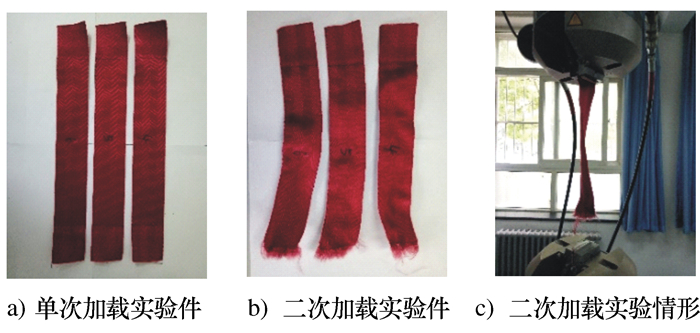
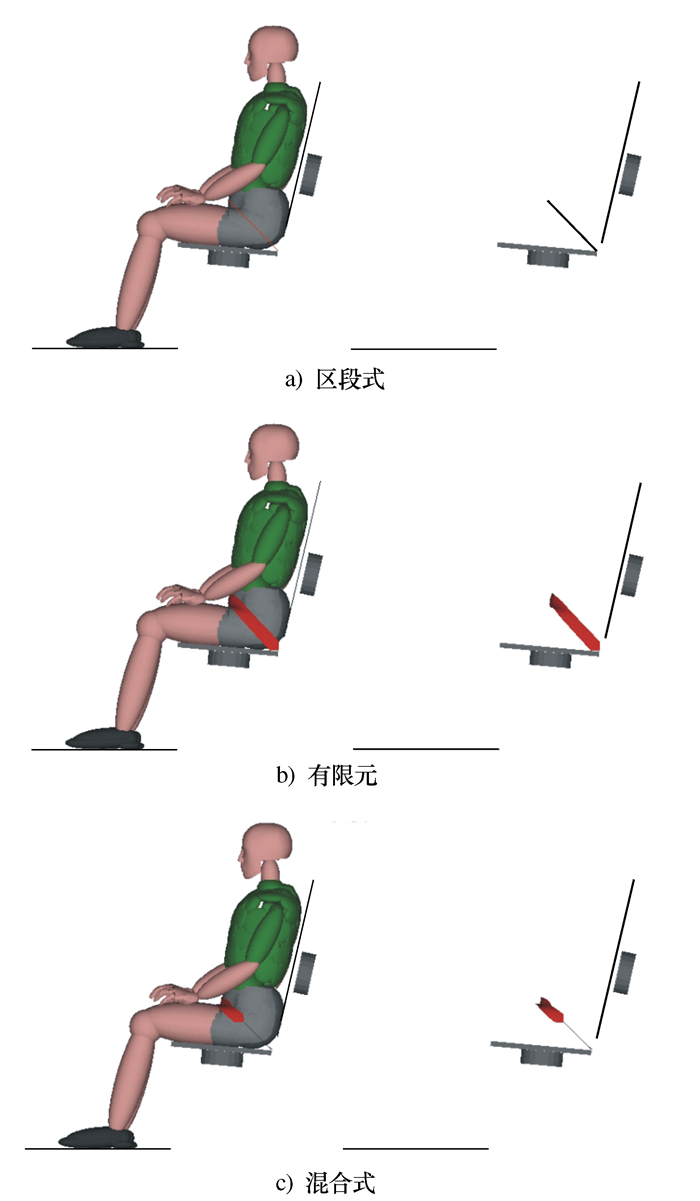
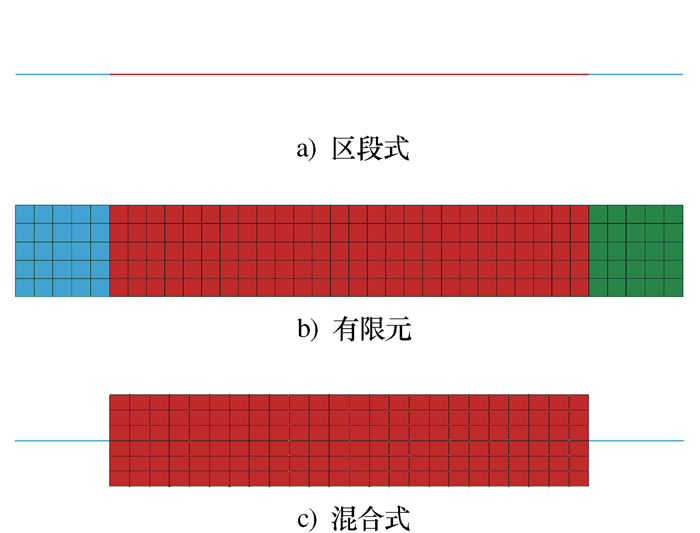
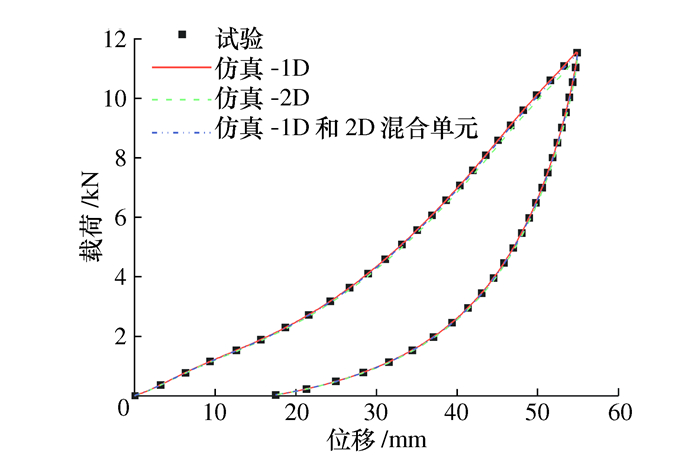
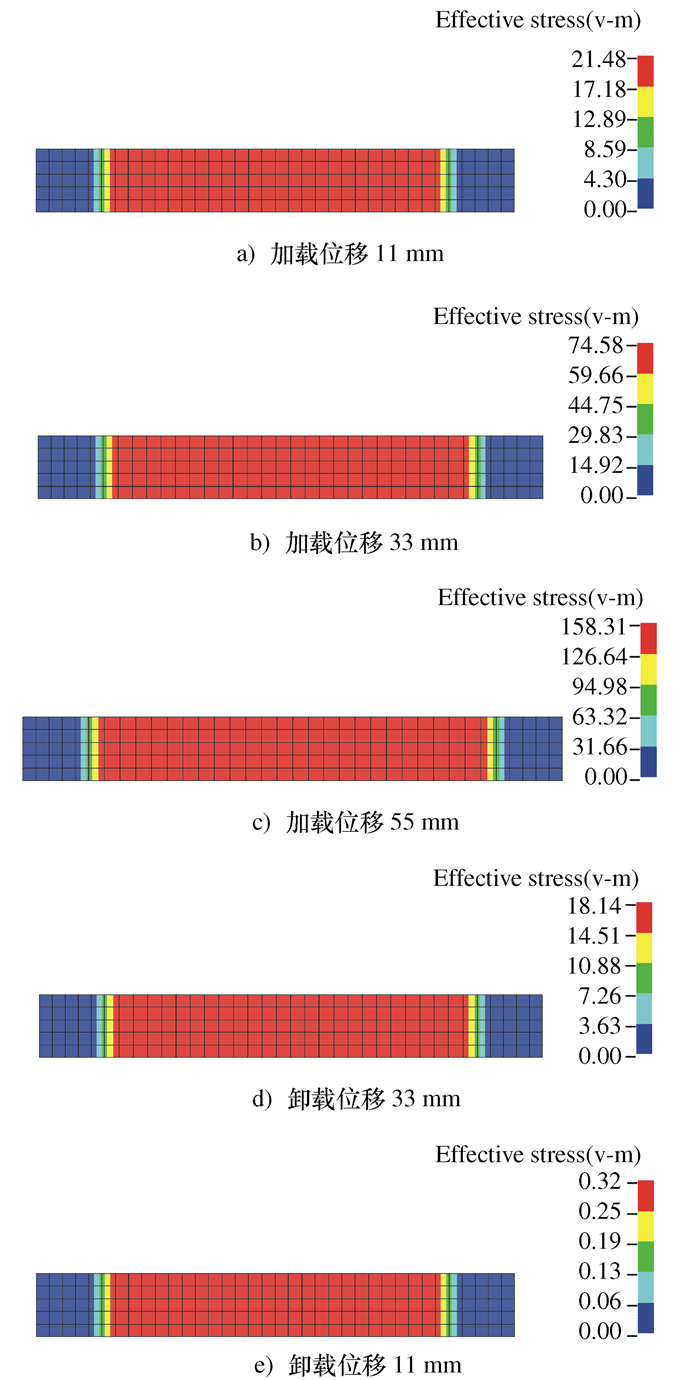
航空安全带是保障乘员安全的关键部件, 为研究航空安全带织带的拉伸力学性能, 利用电子万能实验机, 开展了AM SAFE安全带织带在6.35 mm/min、30 mm/min、152.4 mm/min加载速率、160 mm、254 mm标距段尺寸、以及考虑二次加载影响下的拉伸性能实验, 并基于实验结果, 采用区段式、有限元、混合式3种安全带建模方法, 模拟并对比了安全带织带的拉伸过程。结果表明: 安全带织带迟滞效应明显, 耗能作用显著; 其拉伸力学特性受加载速率影响很小, 受标距段尺寸影响较大, 与加载次数密切相关; 3种建模方式均能较好地表征安全带织带的拉伸力学性能。
航空安全带是保障乘员安全的关键部件, 为研究航空安全带织带的拉伸力学性能, 利用电子万能实验机, 开展了AM SAFE安全带织带在6.35 mm/min、30 mm/min、152.4 mm/min加载速率、160 mm、254 mm标距段尺寸、以及考虑二次加载影响下的拉伸性能实验, 并基于实验结果, 采用区段式、有限元、混合式3种安全带建模方法, 模拟并对比了安全带织带的拉伸过程。结果表明: 安全带织带迟滞效应明显, 耗能作用显著; 其拉伸力学特性受加载速率影响很小, 受标距段尺寸影响较大, 与加载次数密切相关; 3种建模方式均能较好地表征安全带织带的拉伸力学性能。
2024, 43(4): 711-720.
doi: 10.13433/j.cnki.1003-8728.20220282
摘要:
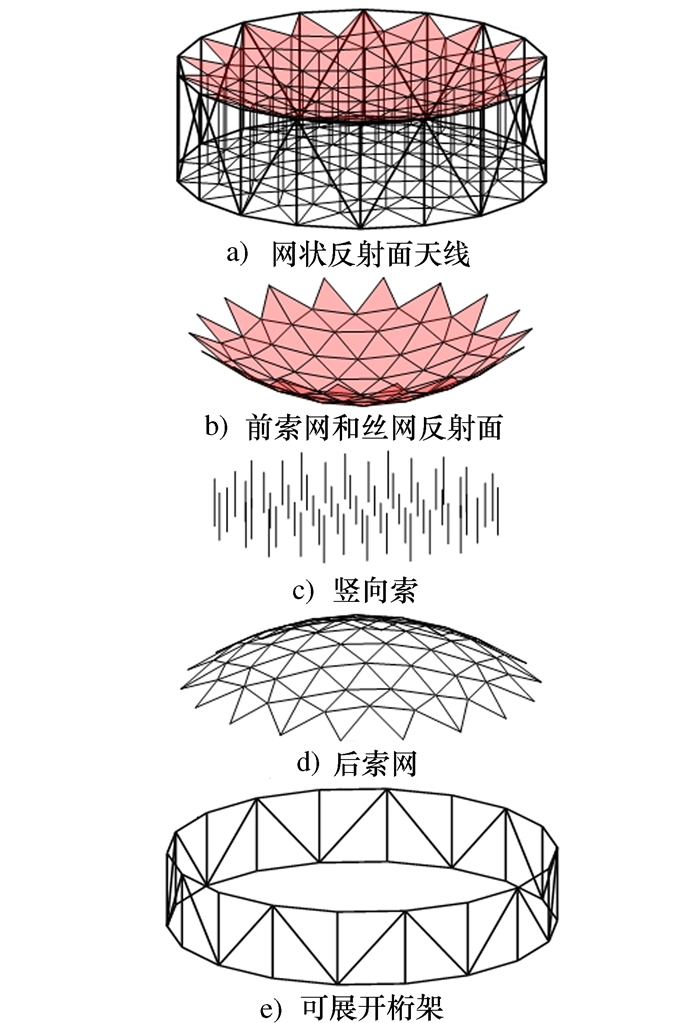
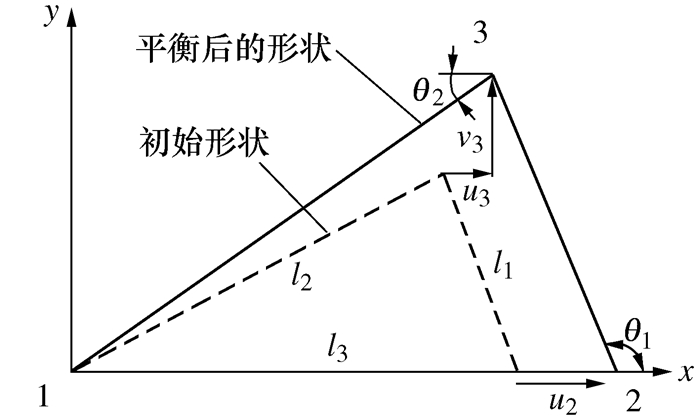
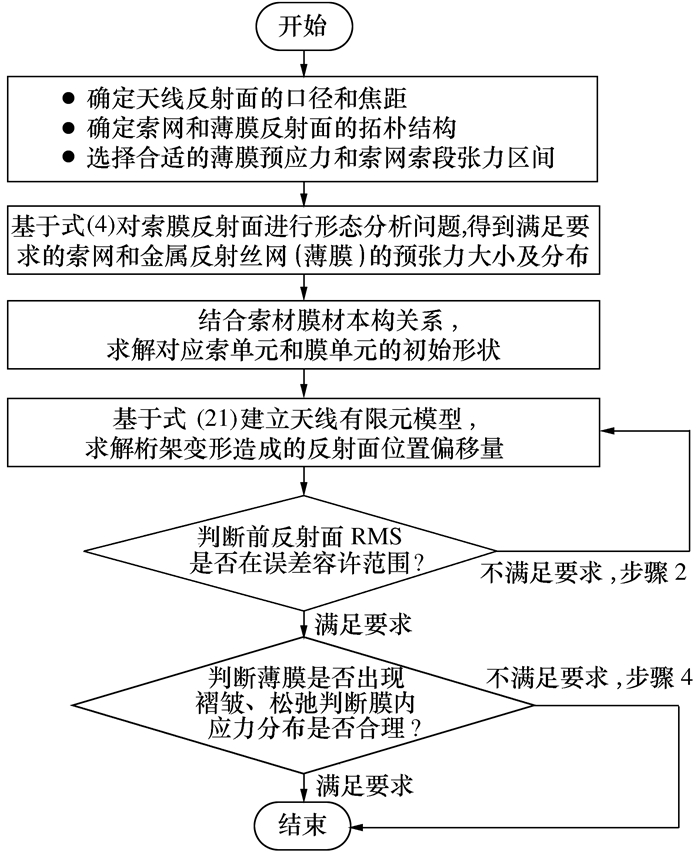
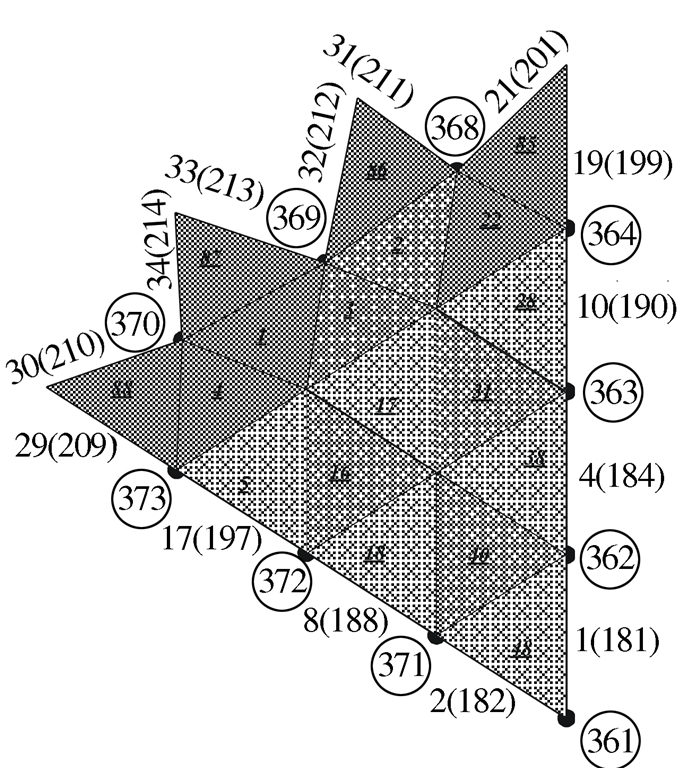
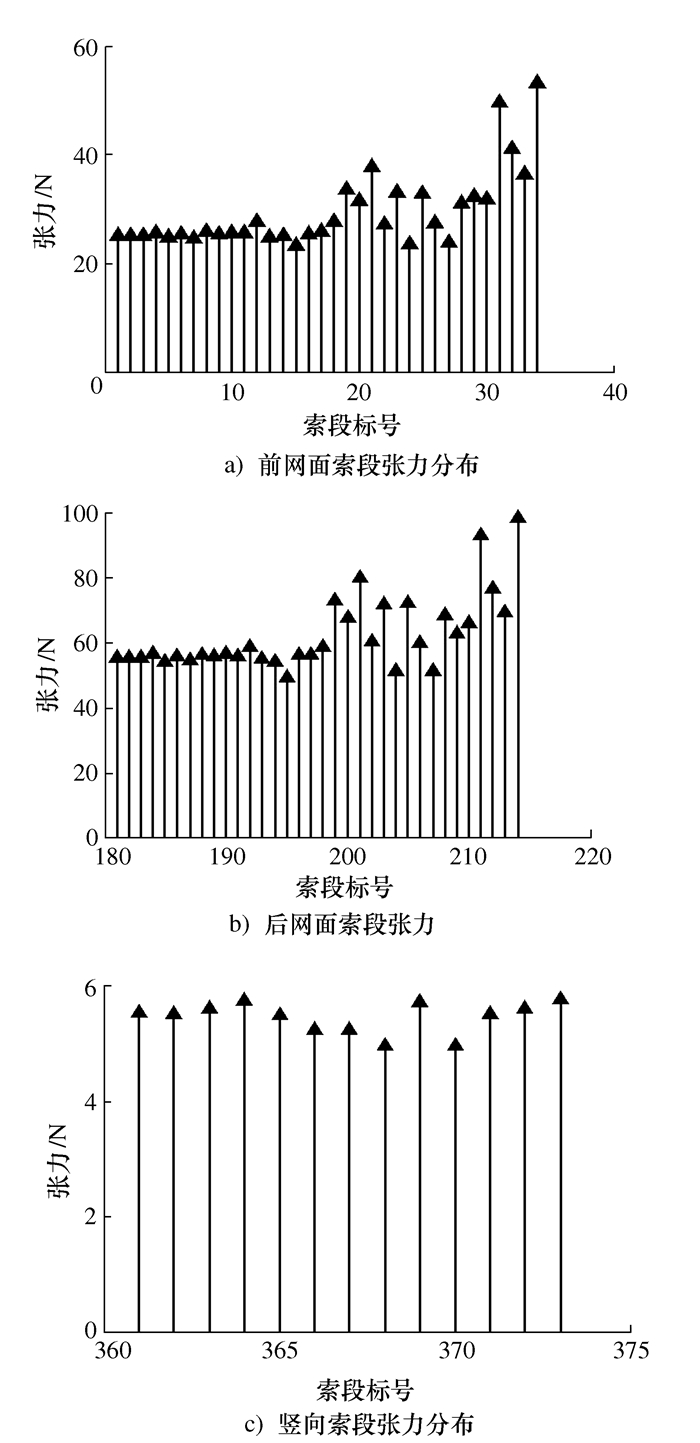
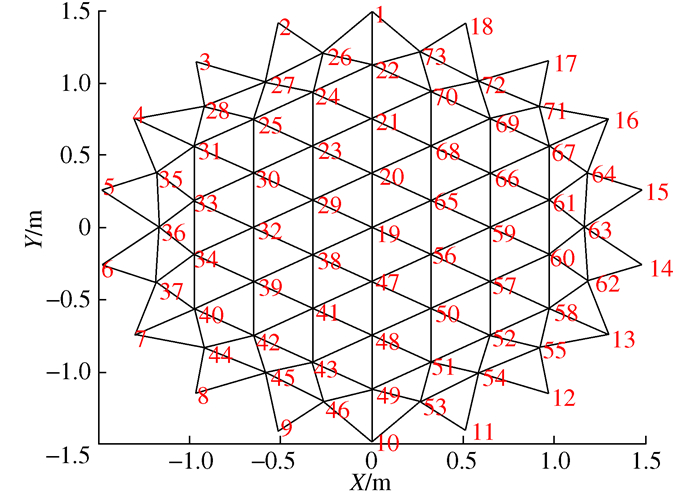
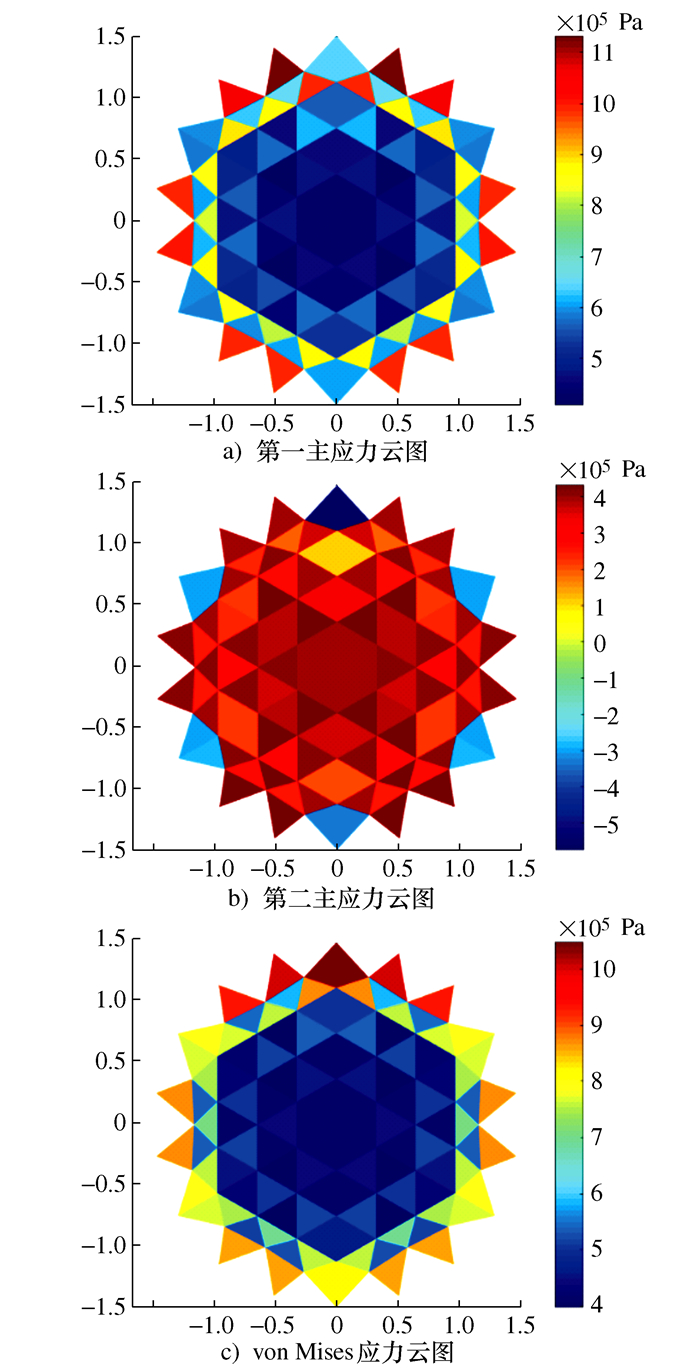
为研究金属反射网和索网的张紧状态对可展开天线形面精度的影响, 考虑支撑桁架变形对索膜反射面可展开天线进行形态设计研究。金属反射网可看作一类薄膜结构, 由于金属反射网和索网均需施加预张力来达到一定的刚度, 因此首先基于索膜结构力密度方程进行形态设计, 使其在自身预张力和外载作用下达到满足要求的形状和精度; 索膜结构的张拉作用会导致桁架变形, 造成再平衡后索膜反射面形面精度的降低和张力分布不合理, 因此, 需要建立天线整体的非线性有限元模型; 对天线模型进行迭代修正, 最后得到满足要求的张力设计变量和天线构型。最后通过相应算例, 验证了方法的正确性。
为研究金属反射网和索网的张紧状态对可展开天线形面精度的影响, 考虑支撑桁架变形对索膜反射面可展开天线进行形态设计研究。金属反射网可看作一类薄膜结构, 由于金属反射网和索网均需施加预张力来达到一定的刚度, 因此首先基于索膜结构力密度方程进行形态设计, 使其在自身预张力和外载作用下达到满足要求的形状和精度; 索膜结构的张拉作用会导致桁架变形, 造成再平衡后索膜反射面形面精度的降低和张力分布不合理, 因此, 需要建立天线整体的非线性有限元模型; 对天线模型进行迭代修正, 最后得到满足要求的张力设计变量和天线构型。最后通过相应算例, 验证了方法的正确性。
2024, 43(4): 721-728.
doi: 10.13433/j.cnki.1003-8728.20220259
摘要:
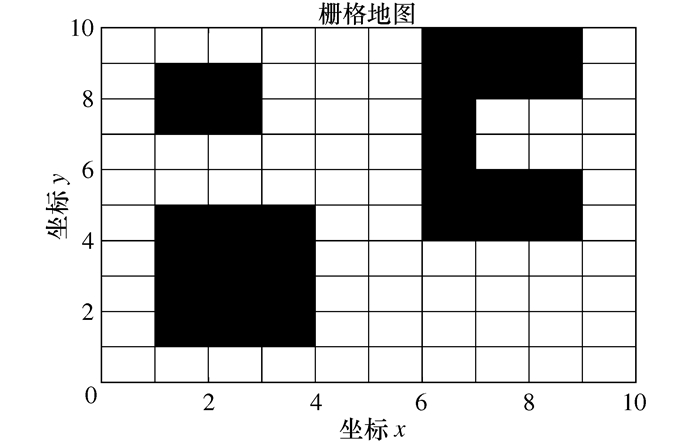
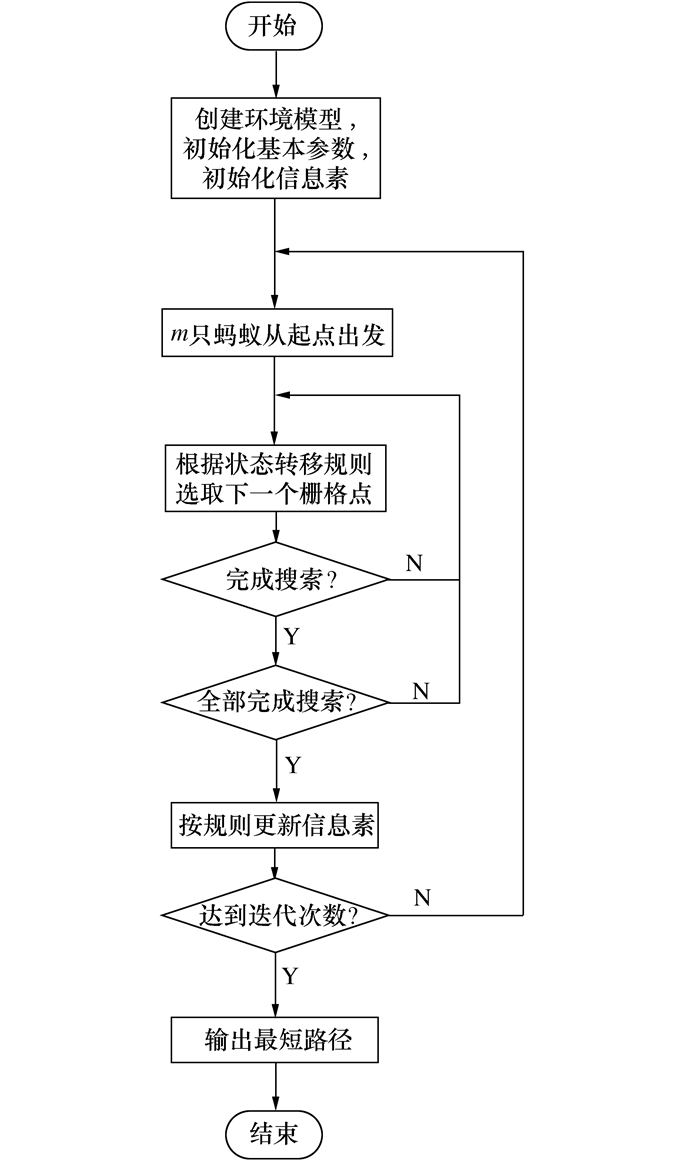
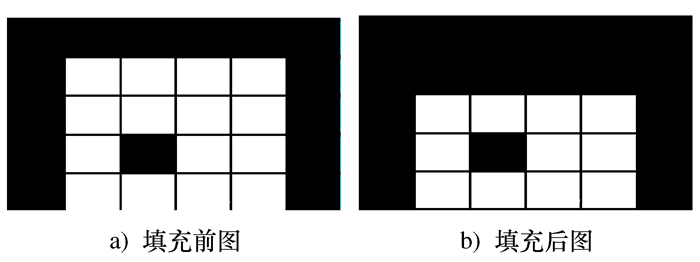
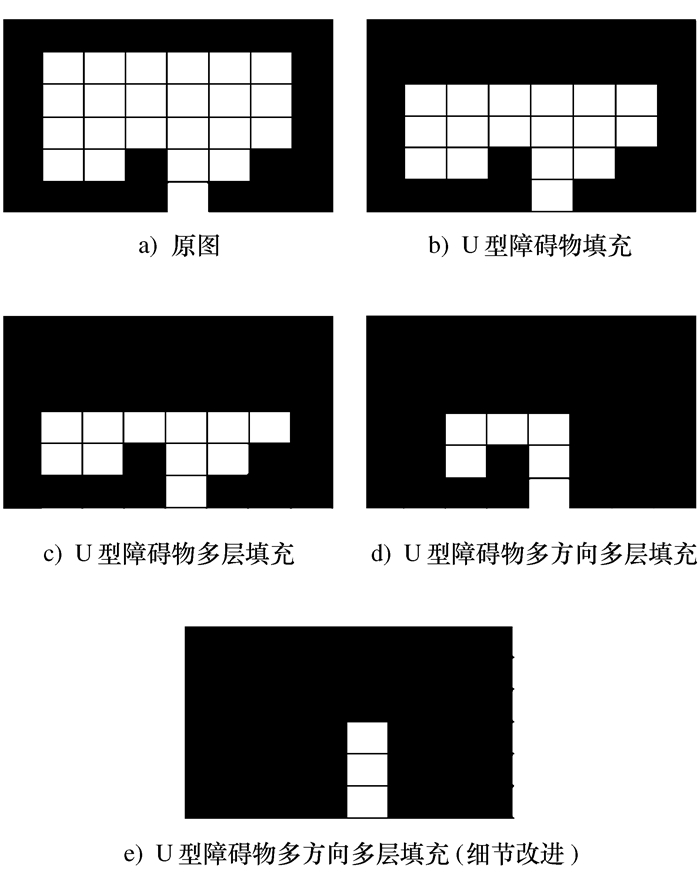
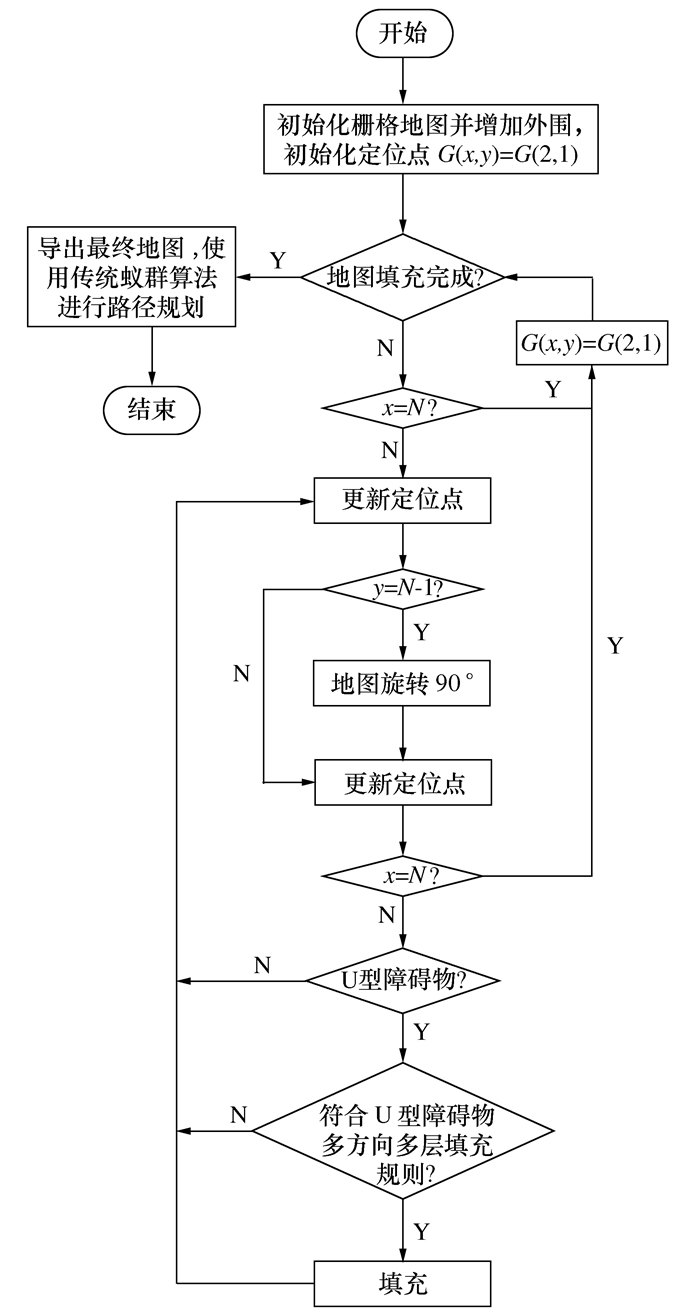
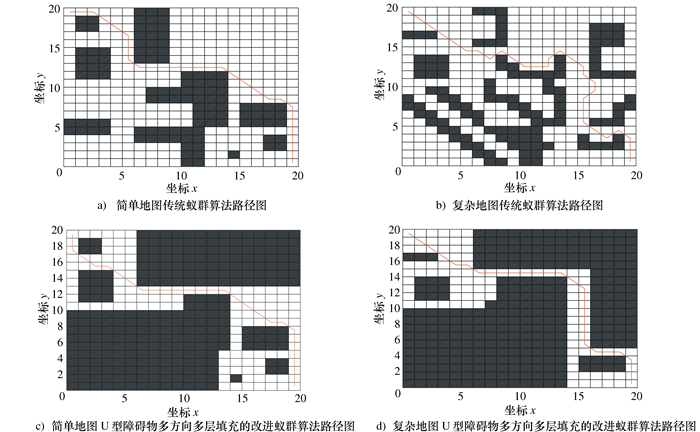
针对传统蚁群算法在移动机器人路径规划中典型的U型障碍物死锁问题, 提出了一种U型障碍物多方向多层填充的改进蚁群算法。首先证明了路径规划的最优解不会进入U型障碍物之中; 其次证明了运用此多方向多层填充法在填充U型障碍物解决死锁问题的同时, 不会造成原有通路的阻塞, 具有原通路保持性, 且填充的迭代次数与迭代总时间少; 之后对填充图形的迭代次数给出了理论性的判定, 此填充方法不仅适用于U型障碍物还适用于其它可填充区域, 且其对于可填充区域可实现完全填充; 最后将此填充方法与蚁群算法结合。仿真结果表明, 改进蚁群算法相比于传统蚁群算法有效率提升。
针对传统蚁群算法在移动机器人路径规划中典型的U型障碍物死锁问题, 提出了一种U型障碍物多方向多层填充的改进蚁群算法。首先证明了路径规划的最优解不会进入U型障碍物之中; 其次证明了运用此多方向多层填充法在填充U型障碍物解决死锁问题的同时, 不会造成原有通路的阻塞, 具有原通路保持性, 且填充的迭代次数与迭代总时间少; 之后对填充图形的迭代次数给出了理论性的判定, 此填充方法不仅适用于U型障碍物还适用于其它可填充区域, 且其对于可填充区域可实现完全填充; 最后将此填充方法与蚁群算法结合。仿真结果表明, 改进蚁群算法相比于传统蚁群算法有效率提升。
2024, 43(4): 729-736.
doi: 10.13433/j.cnki.1003-8728.20220289
摘要:
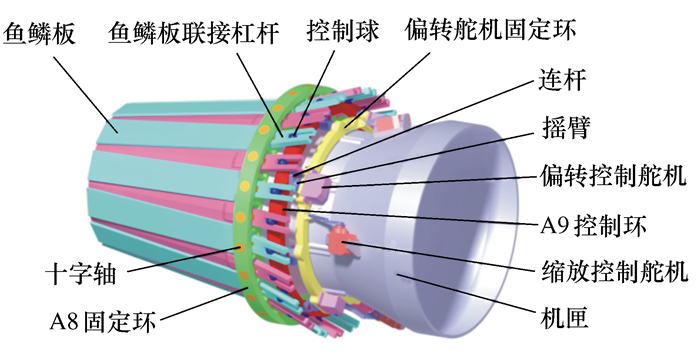
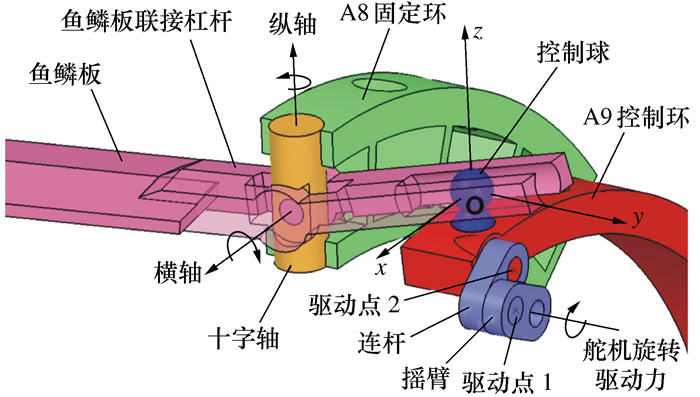
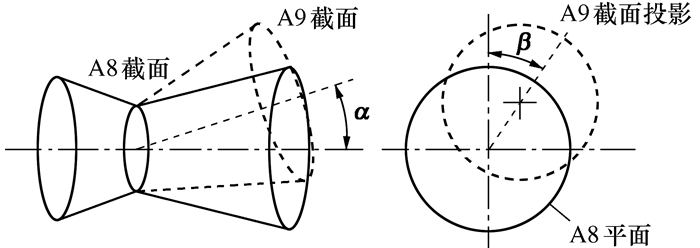
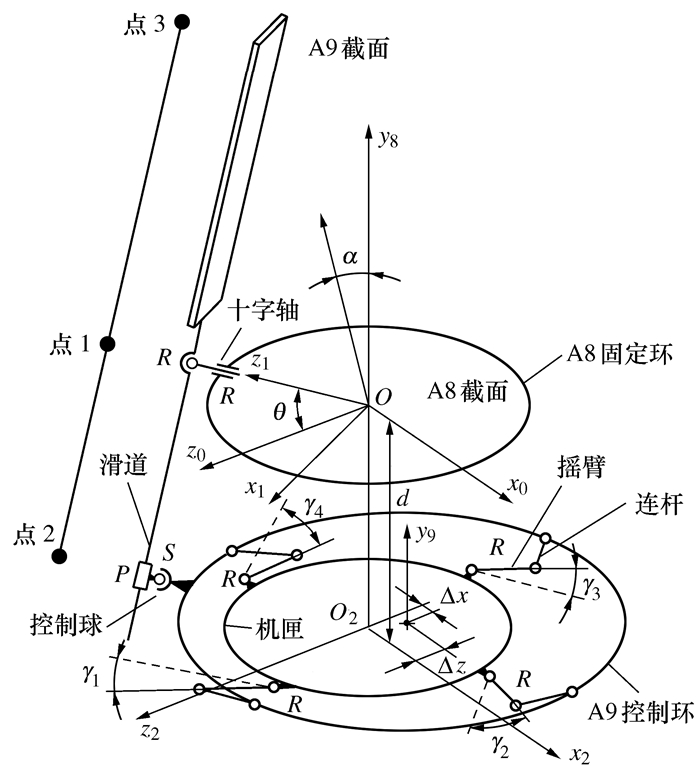
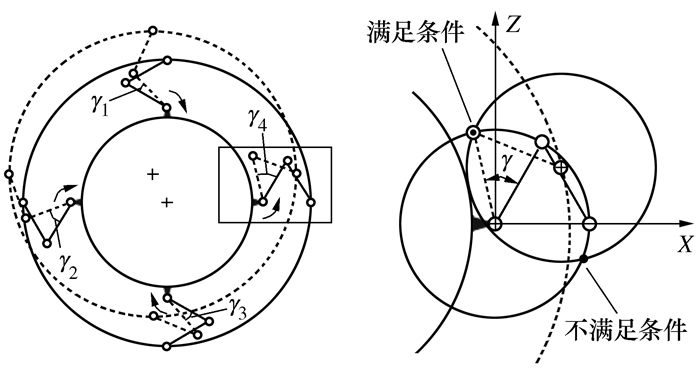
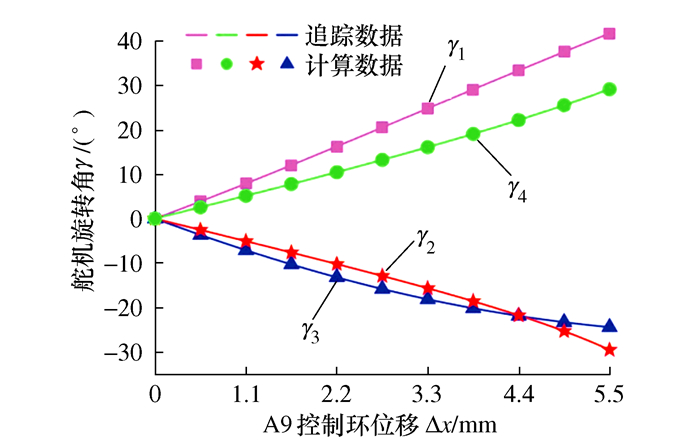
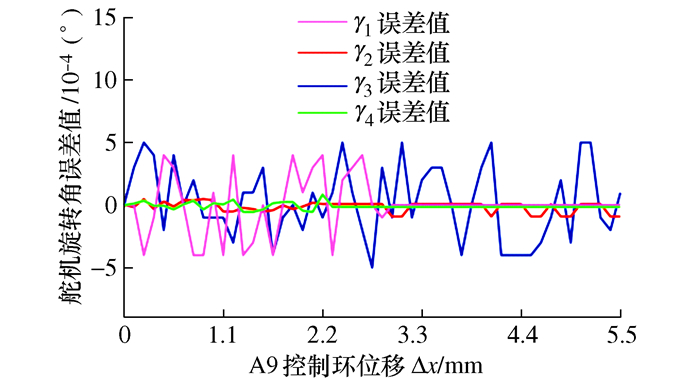
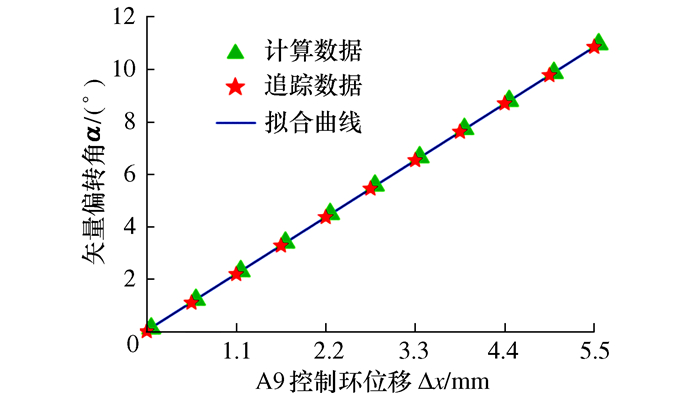
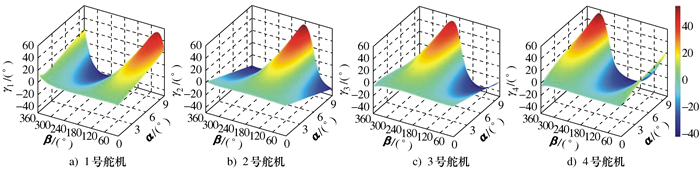
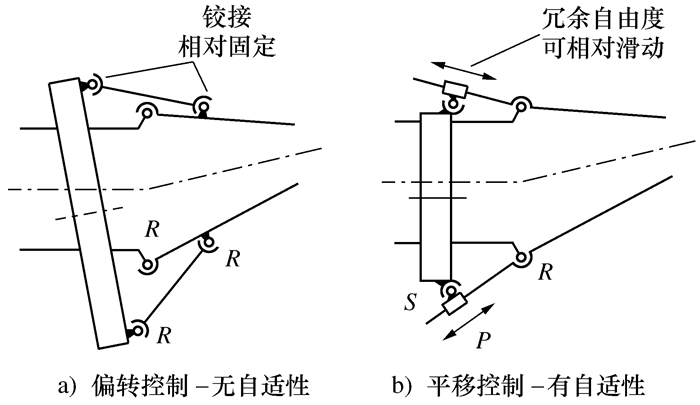
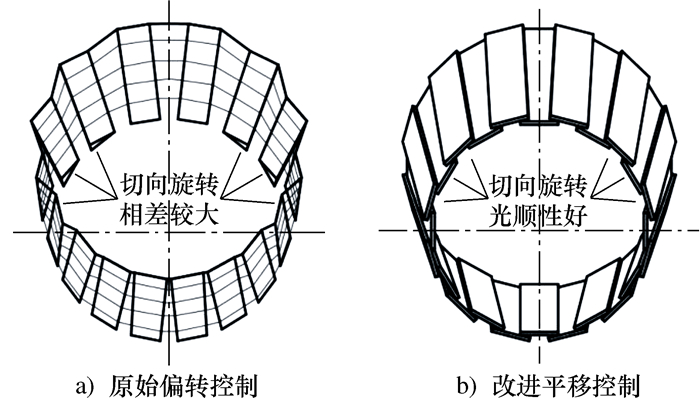
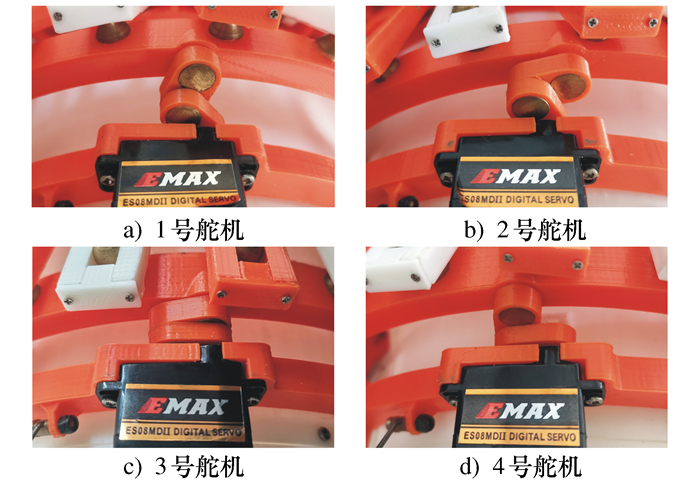
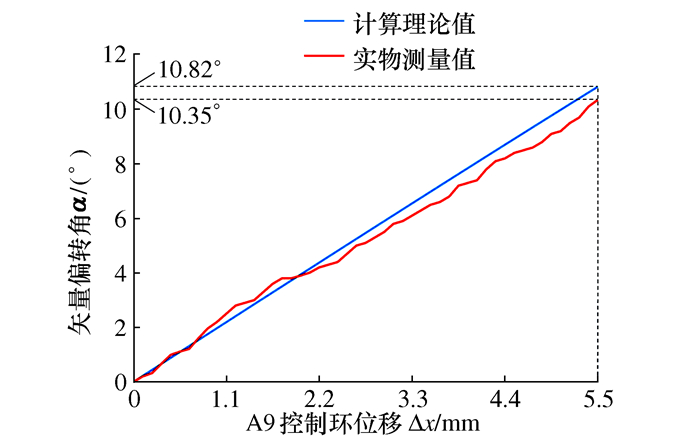
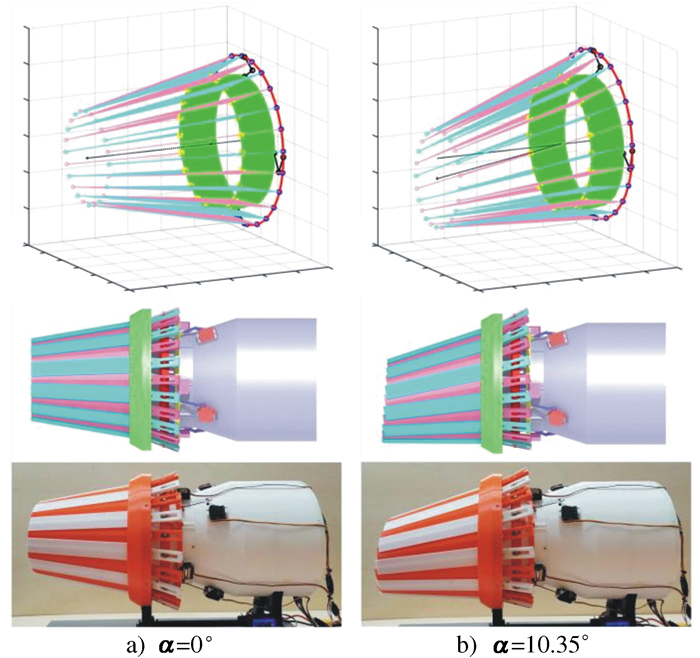
为解决轴对称矢量喷管原始偏转控制方案中出现的奇异性问题及出口截面光顺性较差的问题, 提出了一种新型平移控制方案。利用CATIA设计了轴对称矢量喷管平移控制系统的三维模型, 在DMU模块中进行运动仿真并激活传感器追踪驱动舵机的旋转角度数据。将三维模型尺寸数据及约束关系代入MATLAB中, 建立了空间运动学方程, 进行数值计算、曲线拟合及误差分析。获得了描述喷管矢量偏转角、矢量方位角与舵机旋转角映射关系的二维插值模型, 进而建立了各个控制周期内矢量偏转角、矢量方位角的动态控制指令。仿真结果表明: 该平移控制方案不存在奇异位置且出口截面形状较好, 提高了喷管的可靠性及密封性, 满足轴对称矢量喷管的精准控制需求, 最后通过模型样机进一步验证了该平移控制方案的可行性。
为解决轴对称矢量喷管原始偏转控制方案中出现的奇异性问题及出口截面光顺性较差的问题, 提出了一种新型平移控制方案。利用CATIA设计了轴对称矢量喷管平移控制系统的三维模型, 在DMU模块中进行运动仿真并激活传感器追踪驱动舵机的旋转角度数据。将三维模型尺寸数据及约束关系代入MATLAB中, 建立了空间运动学方程, 进行数值计算、曲线拟合及误差分析。获得了描述喷管矢量偏转角、矢量方位角与舵机旋转角映射关系的二维插值模型, 进而建立了各个控制周期内矢量偏转角、矢量方位角的动态控制指令。仿真结果表明: 该平移控制方案不存在奇异位置且出口截面形状较好, 提高了喷管的可靠性及密封性, 满足轴对称矢量喷管的精准控制需求, 最后通过模型样机进一步验证了该平移控制方案的可行性。