Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2021 Vol. 40, No. 5
Display Method:
2021, 40(5): 657-662.
doi: 10.13433/j.cnki.1003-8728.20200080
 PDF 3263KB
PDF 3263KB
Abstract:
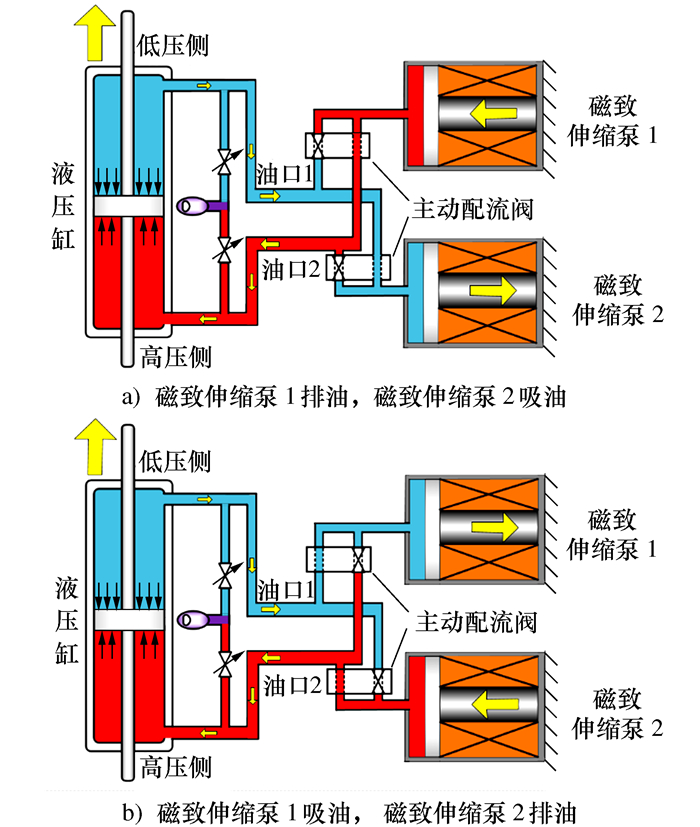
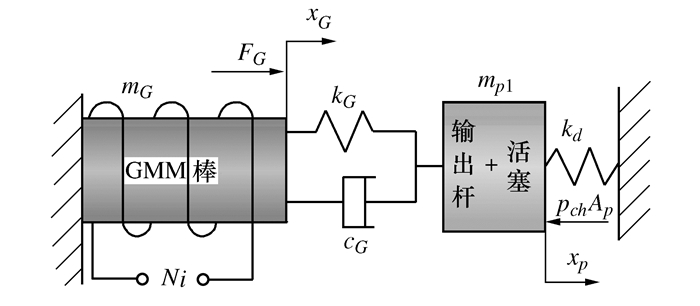
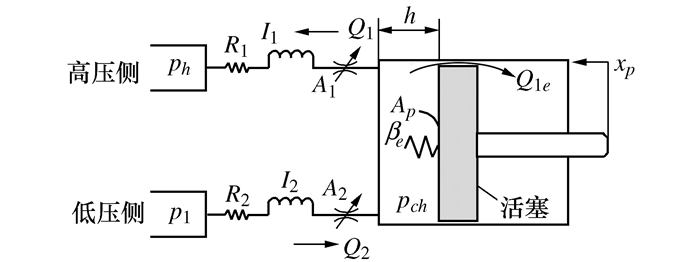
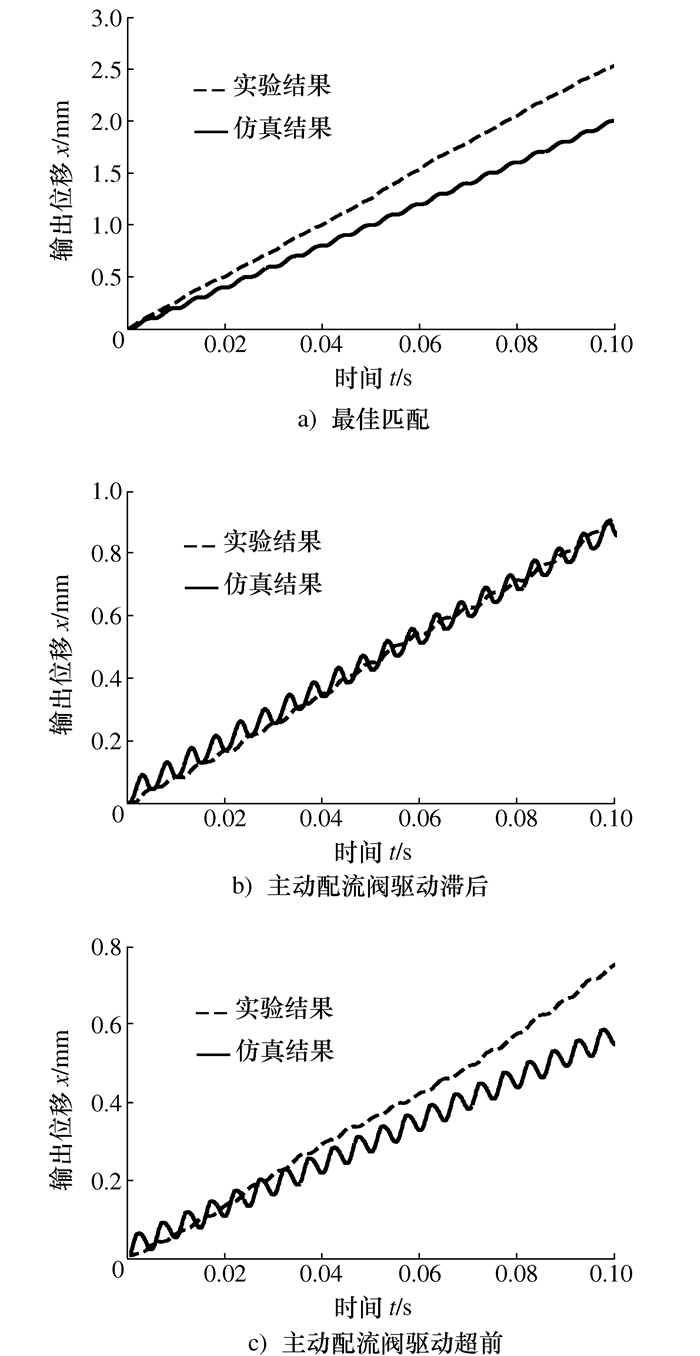
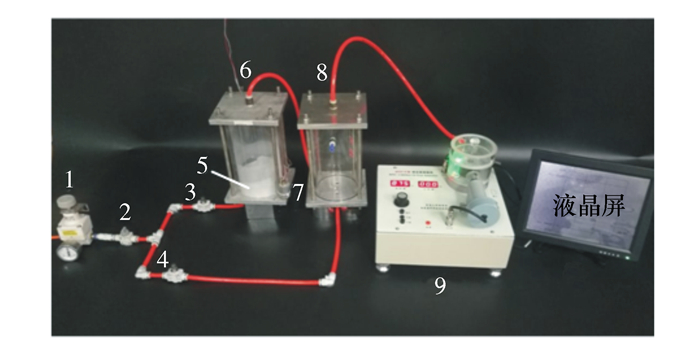
A dual magnetostrictive axial plunger pumps-based electro-hydrostatic actuator (DMAEHA) is designed, and a new type of active rectification valve is proposed in this paper. The electro-hydraulic actuator driven by dual magnetostrictive axial plunger pumps can output bidirectional continuous displacement. Through the establishment of the mathematical model of the DMAEHA, it can be find that how the motor speed and the pipeline affects the output characteristics of the hydraulic cylinder. The experimental platform is built to test and verify the flow output characteristics of the DMAEHA at the same space and different phase angles. Through the comparison between the model analysis and the experiment results, the output characteristics of DMAEHA with different pipeline lengths are predicted. The experimental results show that the maximum output flow can reach 2.7 L/min at 180 Hz.
A dual magnetostrictive axial plunger pumps-based electro-hydrostatic actuator (DMAEHA) is designed, and a new type of active rectification valve is proposed in this paper. The electro-hydraulic actuator driven by dual magnetostrictive axial plunger pumps can output bidirectional continuous displacement. Through the establishment of the mathematical model of the DMAEHA, it can be find that how the motor speed and the pipeline affects the output characteristics of the hydraulic cylinder. The experimental platform is built to test and verify the flow output characteristics of the DMAEHA at the same space and different phase angles. Through the comparison between the model analysis and the experiment results, the output characteristics of DMAEHA with different pipeline lengths are predicted. The experimental results show that the maximum output flow can reach 2.7 L/min at 180 Hz.






2021, 40(5): 663-669.
doi: 10.13433/j.cnki.1003-8728.20200070
Abstract:
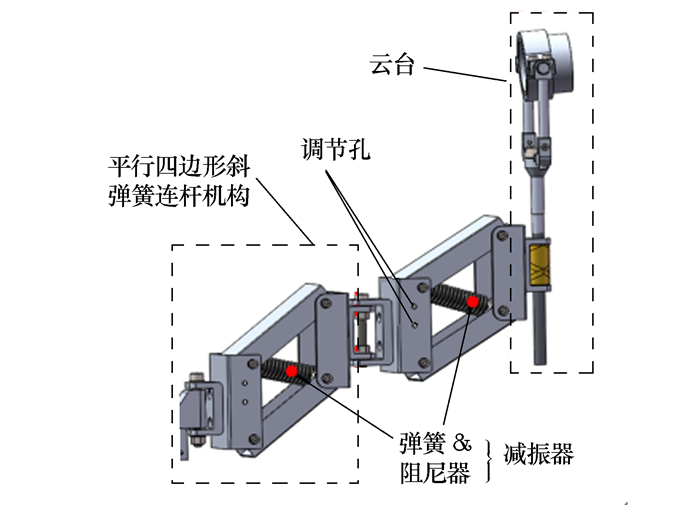
The method of double rectangular coordinates is used to solve the human-machine coupling model of riveting with anti-vibration exoskeleton. In terms of the Lagrange principle, the differential equations of motion in the horizontal and vertical directions of rivet tool are established to obtain the shock absorber parameters which affect the vibration reduction performance of anti-vibration exoskeleton. Based on the human-machine coupled model and the exoskeleton prototype parameters, the 5 factors and 4 levels orthogonal test is designed according to the standard orthogonal table L16(45) to analyze the influence of the shock absorber parameters on the vibration reduction performance of anti-vibration exoskeleton. The results of orthogonal simulation test show that the shock absorber parameters have a significant influence on the horizontal force Fx and the resultant force μF, but little effect on the vertical force Fy. The influence significant order of the shock absorber parameters is l1 > c2 > k1 > k2 > c1. on Fx and l1 > c2 > k2 > k1 > c1 on μF; the shock absorber installation position l1 is the main influencing factor of Fx and μF, and the optimal combination of parameters in the test range is l1(4)k1(4)k2(4)c1(4)c2(4). It determines the influence of the shock absorber parameters on the vibration reduction performance of anti-vibration exoskeleton, which provides a reference for the shock absorber parameter design and the similar anti-vibration structure design.
The method of double rectangular coordinates is used to solve the human-machine coupling model of riveting with anti-vibration exoskeleton. In terms of the Lagrange principle, the differential equations of motion in the horizontal and vertical directions of rivet tool are established to obtain the shock absorber parameters which affect the vibration reduction performance of anti-vibration exoskeleton. Based on the human-machine coupled model and the exoskeleton prototype parameters, the 5 factors and 4 levels orthogonal test is designed according to the standard orthogonal table L16(45) to analyze the influence of the shock absorber parameters on the vibration reduction performance of anti-vibration exoskeleton. The results of orthogonal simulation test show that the shock absorber parameters have a significant influence on the horizontal force Fx and the resultant force μF, but little effect on the vertical force Fy. The influence significant order of the shock absorber parameters is l1 > c2 > k1 > k2 > c1. on Fx and l1 > c2 > k2 > k1 > c1 on μF; the shock absorber installation position l1 is the main influencing factor of Fx and μF, and the optimal combination of parameters in the test range is l1(4)k1(4)k2(4)c1(4)c2(4). It determines the influence of the shock absorber parameters on the vibration reduction performance of anti-vibration exoskeleton, which provides a reference for the shock absorber parameter design and the similar anti-vibration structure design.





2021, 40(5): 670-677.
doi: 10.13433/j.cnki.1003-8728.20200114
Abstract:
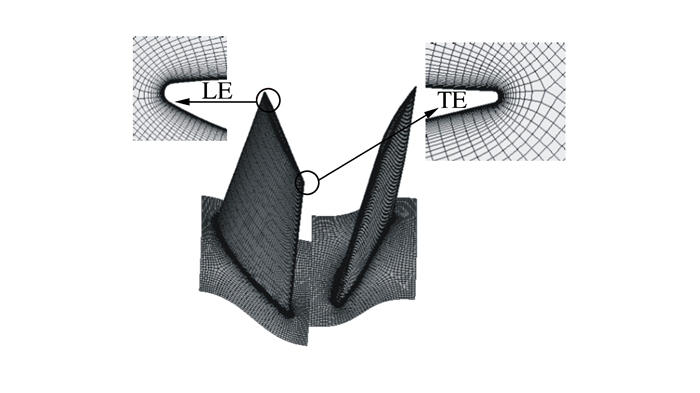
In order to reveal the unsteady flow characteristics and stall mechanism of a mining contra-rotating main fan for forced type ventilation under the distortion air intake condition, numerical simulation and analysis of the flow in the three-dimensional full flow-field of the contra-rotating fan are carried out by combining the Detached Eddy Simulation (DES) method with the outlet throttle function. The results show that when the throttle coefficient is 0.8 degrees, the stall disturbance occurs in both impellers, and the starting disturbance occurs at the tip of the blade. Even disturbance exists in the region near the blade root of the rear impeller, however, the disturbance near the blade root and disturbances in the tip region are formed independently. "Spike-type" stall inception is accompanied by the occurrence of "leading edge overflow" and "trailing edge backflow". Although the occurrence of stall precursor in the rear impeller is earlier than that in the front impeller, the fluctuation intensity of air flow in the tip clearance of the front impeller is significantly more violent than that in the rear impeller as the flow rate decreases, and the interference effect between the two impellers is serious.
In order to reveal the unsteady flow characteristics and stall mechanism of a mining contra-rotating main fan for forced type ventilation under the distortion air intake condition, numerical simulation and analysis of the flow in the three-dimensional full flow-field of the contra-rotating fan are carried out by combining the Detached Eddy Simulation (DES) method with the outlet throttle function. The results show that when the throttle coefficient is 0.8 degrees, the stall disturbance occurs in both impellers, and the starting disturbance occurs at the tip of the blade. Even disturbance exists in the region near the blade root of the rear impeller, however, the disturbance near the blade root and disturbances in the tip region are formed independently. "Spike-type" stall inception is accompanied by the occurrence of "leading edge overflow" and "trailing edge backflow". Although the occurrence of stall precursor in the rear impeller is earlier than that in the front impeller, the fluctuation intensity of air flow in the tip clearance of the front impeller is significantly more violent than that in the rear impeller as the flow rate decreases, and the interference effect between the two impellers is serious.













2021, 40(5): 678-689.
doi: 10.13433/j.cnki.1003-8728.20200104
Abstract:
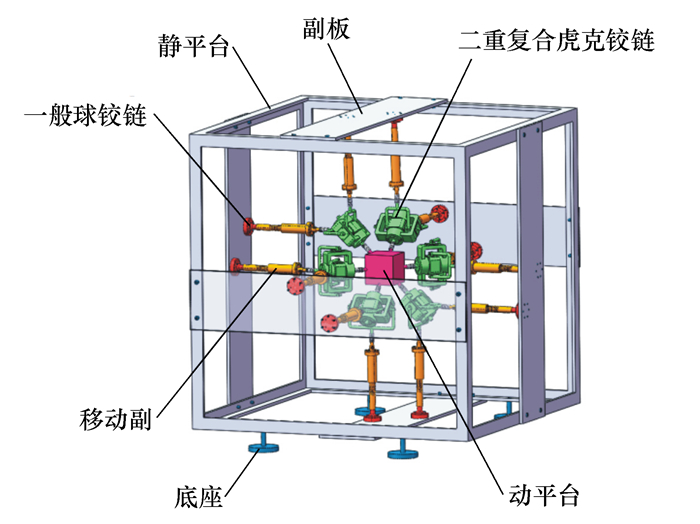
Aiming at the problem that traditional Stewart parallel robot has a high degree of motion coupling which makes it difficult to solve robot′s kinematics, a derivative topology is given, and its structure model is designed in detail in this study. Firstly, based on the theory of azimuth feature set, the topological configuration of the mechanism is analyzed with single open chain as the branch unit, the degrees of freedom and coupling are calculated, and the results are 6 and 1 respectively. Then, the analytic equations of forward and reverse kinematics are deduced and verified. In order to meet the requirements of robot motion, a composite hinge and a movable pair which can convert the main and slave motion are invented. Furthermore, the prototype of the robot was manufactured and the strength of its important parts was checked. The maximum static load that the prototype could bear is about 12 000 N. The above scheme and conclusion lay a theoretical foundation for the structural optimization and dynamic control of 6-DOF parallel robot.
Aiming at the problem that traditional Stewart parallel robot has a high degree of motion coupling which makes it difficult to solve robot′s kinematics, a derivative topology is given, and its structure model is designed in detail in this study. Firstly, based on the theory of azimuth feature set, the topological configuration of the mechanism is analyzed with single open chain as the branch unit, the degrees of freedom and coupling are calculated, and the results are 6 and 1 respectively. Then, the analytic equations of forward and reverse kinematics are deduced and verified. In order to meet the requirements of robot motion, a composite hinge and a movable pair which can convert the main and slave motion are invented. Furthermore, the prototype of the robot was manufactured and the strength of its important parts was checked. The maximum static load that the prototype could bear is about 12 000 N. The above scheme and conclusion lay a theoretical foundation for the structural optimization and dynamic control of 6-DOF parallel robot.


















2021, 40(5): 690-693.
doi: 10.13433/j.cnki.1003-8728.20200295
Abstract:
Due to limited data and performance degeneration, the reliability of harmonic gear drive involves probability-interval hybrid uncertainty and has distinct time-variant characteristic. In order to solve these problems more effectively, a monotonic function method (MFM) for hybrid time-variant reliability analysis is proposed. Firstly, hybrid time-variant reliability model of harmonic gear drive is built up with the stress-strength interference theory; secondly, the effect of time is eliminated by analyzing the monotonicity of reliability model dynamic response with respect to time variable; thirdly, the monotonicity of reliability model response about interval variable is judged by partial derivative, and the probability-interval hybrid reliability is transform into the probabilistic time-invariant reliability. Then, the reliability of harmonic gear drive is calculated by Monte Carlo method. Reliability analysis result for an engineering example shows that MFM reduces computational complexity effectively, and reflects reliability dynamic change process of harmonic gear drive accurately.
Due to limited data and performance degeneration, the reliability of harmonic gear drive involves probability-interval hybrid uncertainty and has distinct time-variant characteristic. In order to solve these problems more effectively, a monotonic function method (MFM) for hybrid time-variant reliability analysis is proposed. Firstly, hybrid time-variant reliability model of harmonic gear drive is built up with the stress-strength interference theory; secondly, the effect of time is eliminated by analyzing the monotonicity of reliability model dynamic response with respect to time variable; thirdly, the monotonicity of reliability model response about interval variable is judged by partial derivative, and the probability-interval hybrid reliability is transform into the probabilistic time-invariant reliability. Then, the reliability of harmonic gear drive is calculated by Monte Carlo method. Reliability analysis result for an engineering example shows that MFM reduces computational complexity effectively, and reflects reliability dynamic change process of harmonic gear drive accurately.



2021, 40(5): 694-700.
doi: 10.13433/j.cnki.1003-8728.20200125
Abstract:
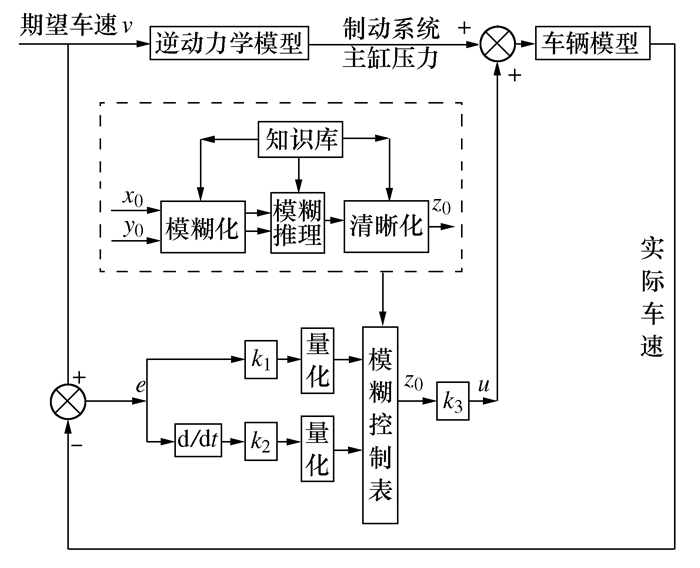
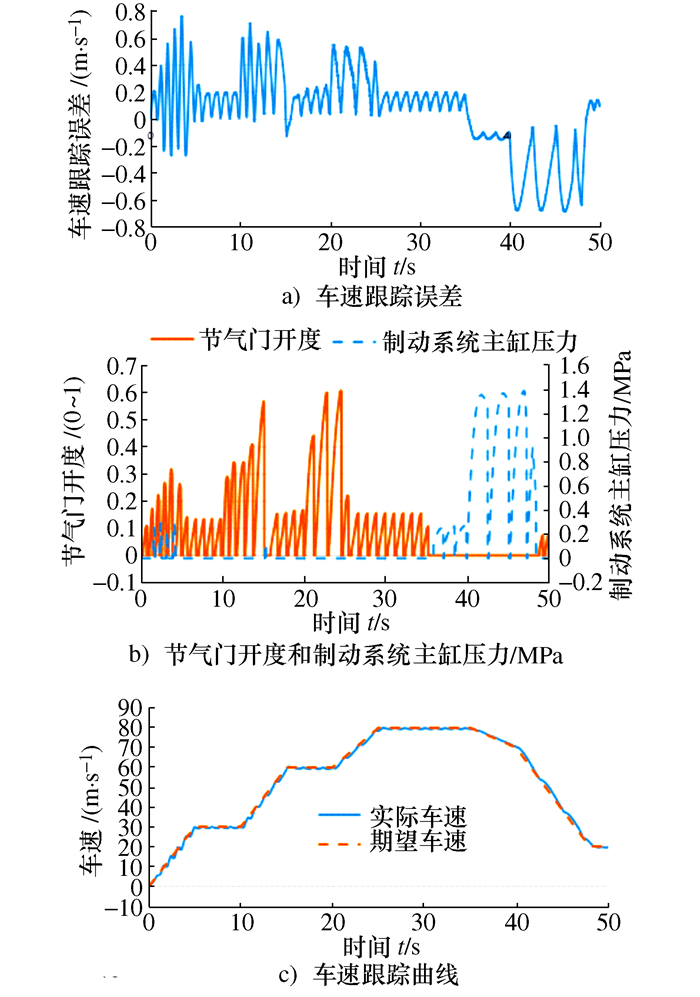
In order to improve the accuracy of a smart vehicle′s longitudinal speed following control on the premise of satisfying the ride comfort, we propose a longitudinal control strategy that is consistent with driving intention and driver behavior characteristics. First, we design the throttle and brake switching strategy, calculate the expected acceleration / deceleration according to the expected speed of the vehicle so as to obtain the driving intention, complete the throttle and brake switching control. Second, we propose a braking control strategy based on fuzzy control. In addition, a PI throttle control strategy with adjustable proportional gain is designed. In the end, the control strategy and the PID vehicle speed tracking control strategy designed in this paper are used to simulate the NI real-time system. The simulation results show that the driver speed-based tracking controller proposed in this paper effectively improves the reference vehicle speed following precision and ride comfort.
In order to improve the accuracy of a smart vehicle′s longitudinal speed following control on the premise of satisfying the ride comfort, we propose a longitudinal control strategy that is consistent with driving intention and driver behavior characteristics. First, we design the throttle and brake switching strategy, calculate the expected acceleration / deceleration according to the expected speed of the vehicle so as to obtain the driving intention, complete the throttle and brake switching control. Second, we propose a braking control strategy based on fuzzy control. In addition, a PI throttle control strategy with adjustable proportional gain is designed. In the end, the control strategy and the PID vehicle speed tracking control strategy designed in this paper are used to simulate the NI real-time system. The simulation results show that the driver speed-based tracking controller proposed in this paper effectively improves the reference vehicle speed following precision and ride comfort.




2021, 40(5): 701-709.
doi: 10.13433/j.cnki.1003-8728.20200313
Abstract:
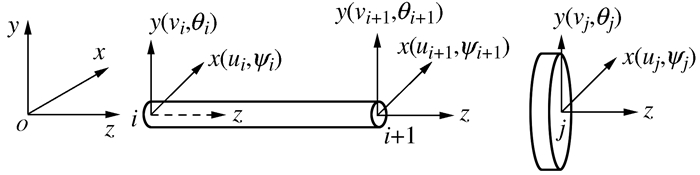
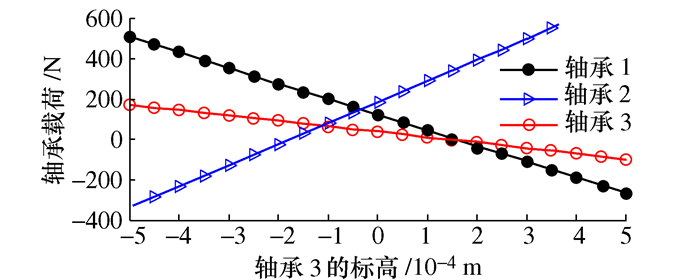
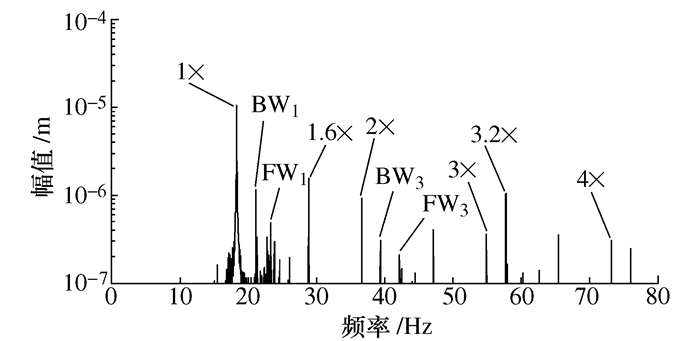
The effects of bearing elevation in inner rotor on the spectrum of the dual-rotor-bearing system were studied by finite element method and the three-moment Equation. Firstly, the finite element dynamic model of the dual-rotor system was established with Timoshenko beam. Secondly, the additional bending moment and bearing load due to the bearing elevation were calculated according to the three-moment Equation. Then, the finite element dynamic model of the dual-rotor system considering the elevation of inner rotor was established, and the dynamic equation of the dual-rotor system was obtained. Finally, the Newmark-β method was used to solve the dynamic equation and the effects of the bearing elevation on the dynamic characteristics of the rotor system was analyzed. In order to verify the simulation results, a dual-rotor test bench was built, and the experimental results were compared with the simulation results. The results show that the additional load of the bearing will be caused by the elevation misalignment, and the additional load will change linearly with the elevation. The additional bearing load causes static deformation of the inner rotor. The unbalanced response under the elevation misalignment condition not only causes the inner and outer rotor to vibrate at one time frequency, but also arouses the natural frequencies in both the forward precession and the backward precession. As a result, the vibration spectrum of the dual rotor bearing system becomes more complex.
The effects of bearing elevation in inner rotor on the spectrum of the dual-rotor-bearing system were studied by finite element method and the three-moment Equation. Firstly, the finite element dynamic model of the dual-rotor system was established with Timoshenko beam. Secondly, the additional bending moment and bearing load due to the bearing elevation were calculated according to the three-moment Equation. Then, the finite element dynamic model of the dual-rotor system considering the elevation of inner rotor was established, and the dynamic equation of the dual-rotor system was obtained. Finally, the Newmark-β method was used to solve the dynamic equation and the effects of the bearing elevation on the dynamic characteristics of the rotor system was analyzed. In order to verify the simulation results, a dual-rotor test bench was built, and the experimental results were compared with the simulation results. The results show that the additional load of the bearing will be caused by the elevation misalignment, and the additional load will change linearly with the elevation. The additional bearing load causes static deformation of the inner rotor. The unbalanced response under the elevation misalignment condition not only causes the inner and outer rotor to vibrate at one time frequency, but also arouses the natural frequencies in both the forward precession and the backward precession. As a result, the vibration spectrum of the dual rotor bearing system becomes more complex.


















2021, 40(5): 710-715.
doi: 10.13433/j.cnki.1003-8728.20200128
Abstract:
In this paper, a high-order sliding mode neural network adaptive control strategy for multi-joint manipulator is proposed and studied. On the basis of the dynamic equation of the manipulator, the sliding surface is set up, and the second derivative of the sliding surface is obtained. The control scheme of the manipulator is designed with the high-order sliding mode control theory. The high-order sliding mode control adopts two parts. For the nominal system, the homogeneous continuous control term is adopted, and the compensation term is added for the external interference in the system, and the RBF neural network is used to approach the certainty in the system. Finally, the stability of the system is proved by the Lyapunov stability theory. Through the MATLAB / Simulink simulation, compared with the traditional sliding mode control, the control algorithm proposed effectively improves the tracking speed and accuracy of the trajectory, and reduces the chattering in the system.
In this paper, a high-order sliding mode neural network adaptive control strategy for multi-joint manipulator is proposed and studied. On the basis of the dynamic equation of the manipulator, the sliding surface is set up, and the second derivative of the sliding surface is obtained. The control scheme of the manipulator is designed with the high-order sliding mode control theory. The high-order sliding mode control adopts two parts. For the nominal system, the homogeneous continuous control term is adopted, and the compensation term is added for the external interference in the system, and the RBF neural network is used to approach the certainty in the system. Finally, the stability of the system is proved by the Lyapunov stability theory. Through the MATLAB / Simulink simulation, compared with the traditional sliding mode control, the control algorithm proposed effectively improves the tracking speed and accuracy of the trajectory, and reduces the chattering in the system.




2021, 40(5): 716-720.
doi: 10.13433/j.cnki.1003-8728.20200117
Abstract:
To calculate the gear mesh stiffness with cracked dedendum is the key issue for solving the dynamic problem of the gear transmission system. An improved energy method considered the crack surface free energy release was proposed. The elastic potential energy of gear with cracked dedendum applied in the normal force on the tooth profile surface is regarded as the sum between the elastic potential energy of crack-free gear and the crack surface free energy released during the crack generation. The crack surface free energy was obtained according to the relationship between the stress intensity factors and the energy release rate of the crack. The stress intensity factors of the cracked dedendum was solved based on the weight function method. The calculation results reveal that the gear mesh stiffness is greatly influenced by the tooth root crack; the gear mesh stiffness decreases with the increasing of crack length. The calculation results are consistent with the ones in ANSYS software.
To calculate the gear mesh stiffness with cracked dedendum is the key issue for solving the dynamic problem of the gear transmission system. An improved energy method considered the crack surface free energy release was proposed. The elastic potential energy of gear with cracked dedendum applied in the normal force on the tooth profile surface is regarded as the sum between the elastic potential energy of crack-free gear and the crack surface free energy released during the crack generation. The crack surface free energy was obtained according to the relationship between the stress intensity factors and the energy release rate of the crack. The stress intensity factors of the cracked dedendum was solved based on the weight function method. The calculation results reveal that the gear mesh stiffness is greatly influenced by the tooth root crack; the gear mesh stiffness decreases with the increasing of crack length. The calculation results are consistent with the ones in ANSYS software.



2021, 40(5): 721-726.
doi: 10.13433/j.cnki.1003-8728.20200120
Abstract:
In order to obtain the ideal polishing surface roughness and polishing surface residual stress of GH4169, a double objective optimal interval division method for polishing process parameters was proposed, and five-factor three-level polishing orthogonal test was designed; According to the standard deviation of the test results, the influence weight coefficients of the process parameters on the optimization objectives were calculated, and multiple optimization objectives were transformed into a comprehensive optimization objective. The change mechanisms and trends of the optimization objectives with the increasing of process parameters were analyzed via tendency chart. The optimal process parameters were determined by using the proposed method, and its reliability was further verified via an experiment.
In order to obtain the ideal polishing surface roughness and polishing surface residual stress of GH4169, a double objective optimal interval division method for polishing process parameters was proposed, and five-factor three-level polishing orthogonal test was designed; According to the standard deviation of the test results, the influence weight coefficients of the process parameters on the optimization objectives were calculated, and multiple optimization objectives were transformed into a comprehensive optimization objective. The change mechanisms and trends of the optimization objectives with the increasing of process parameters were analyzed via tendency chart. The optimal process parameters were determined by using the proposed method, and its reliability was further verified via an experiment.




2021, 40(5): 727-733.
doi: 10.13433/j.cnki.1003-8728.20200312
Abstract:
A regression method of full-stage wear of cutting tool based on the AdaBoost (Adaptive Boosting) integrated algorithm is proposed. Firstly, using the acquired machining process signals and tool wear values, a fitting curve of cutting tool wear is established to achieve an accurate division in the initial wear stage, smooth wear stage, and sharp wear stage. Secondly, the three-stage data samples with the corresponding wear values of cutting tool by extracting the data feature from the machining process signals are obtained. The regression models for the three stages are established with the support vector machine. Thirdly, the AdaBoost algorithm is used to determine the weights of the three regression models in the three stages, and a regression model is established of full-stage wear regression. Finally, the effectiveness of the present model and method is verified with the wear data of a cutting tool collected in the milling cutter.
A regression method of full-stage wear of cutting tool based on the AdaBoost (Adaptive Boosting) integrated algorithm is proposed. Firstly, using the acquired machining process signals and tool wear values, a fitting curve of cutting tool wear is established to achieve an accurate division in the initial wear stage, smooth wear stage, and sharp wear stage. Secondly, the three-stage data samples with the corresponding wear values of cutting tool by extracting the data feature from the machining process signals are obtained. The regression models for the three stages are established with the support vector machine. Thirdly, the AdaBoost algorithm is used to determine the weights of the three regression models in the three stages, and a regression model is established of full-stage wear regression. Finally, the effectiveness of the present model and method is verified with the wear data of a cutting tool collected in the milling cutter.






2021, 40(5): 734-740.
doi: 10.13433/j.cnki.1003-8728.20200113
Abstract:
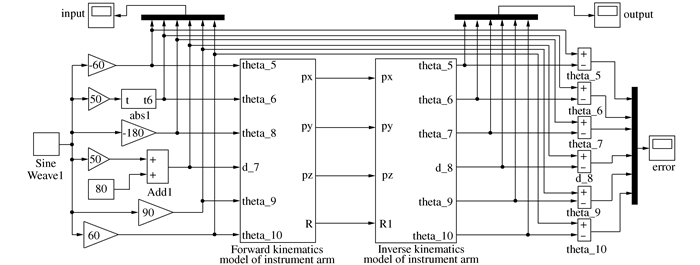
Because of the Da Vinci surgical robot has a special joint configuration, the existence condition of its inverse kinematics analytic solution is not satisfied, that means the inverse kinematics analytical solution of Da Vinci surgical robot can′t be obtained by traditional kinematics modeling method. In this paper, a new kinematics modeling method which combining screw theory with elimination method is first proposed for a kind of robot similar to Da Vinci surgical robot configuration. The inverse kinematics analytical solution of Da Vinci surgical robot is solved successfully by using the proposed method, and the correctness of the method is verified by MATLAB/Simulink simulation. This study enriches the theory of robot kinematics modeling and inverse kinematics analytic solution and provides a fast and general method for accurate analytical solution of Da Vinci surgical robot.
Because of the Da Vinci surgical robot has a special joint configuration, the existence condition of its inverse kinematics analytic solution is not satisfied, that means the inverse kinematics analytical solution of Da Vinci surgical robot can′t be obtained by traditional kinematics modeling method. In this paper, a new kinematics modeling method which combining screw theory with elimination method is first proposed for a kind of robot similar to Da Vinci surgical robot configuration. The inverse kinematics analytical solution of Da Vinci surgical robot is solved successfully by using the proposed method, and the correctness of the method is verified by MATLAB/Simulink simulation. This study enriches the theory of robot kinematics modeling and inverse kinematics analytic solution and provides a fast and general method for accurate analytical solution of Da Vinci surgical robot.







2021, 40(5): 741-748.
doi: 10.13433/j.cnki.1003-8728.20200126
Abstract:
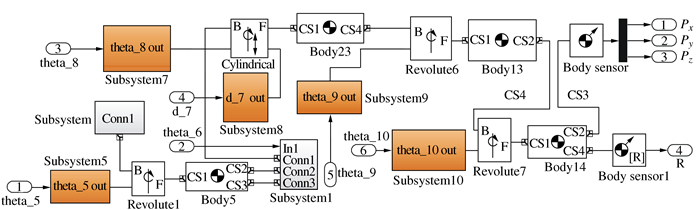
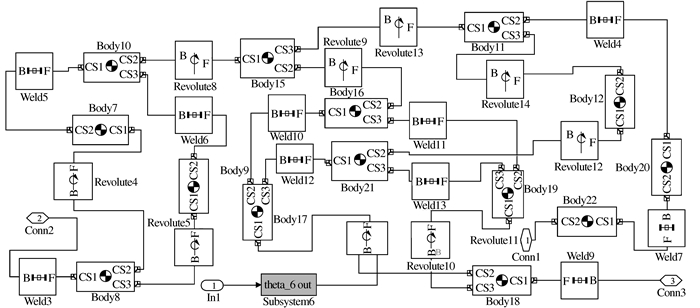
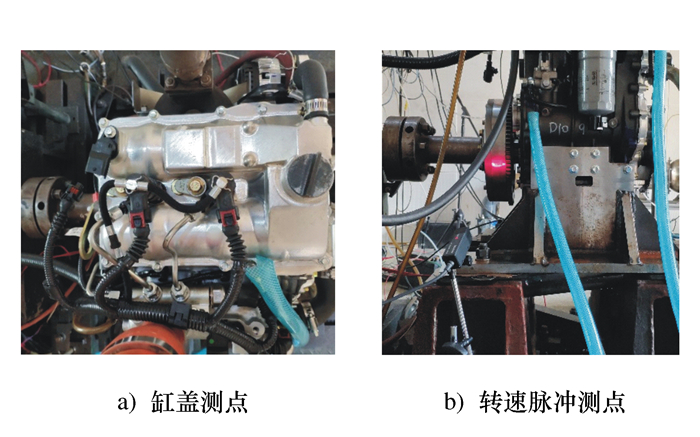
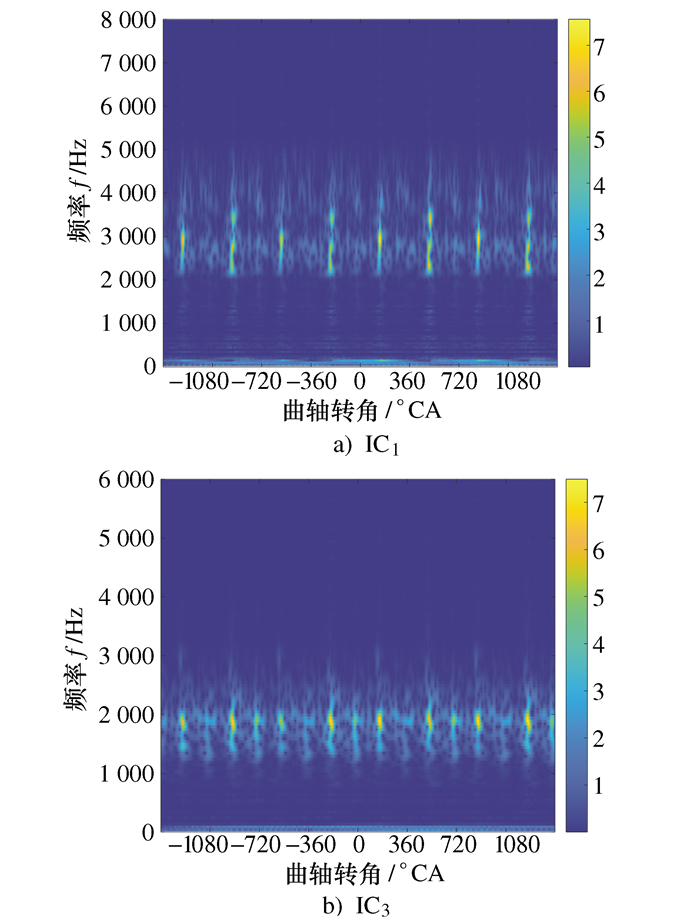
The internal combustion engine is widely used in engineering, power and other fields. However, due to combustion impact, mechanic vibration and the complexity of its structure, the vibration and noise reduction of internal combustion engines has always been a focus of research, and especially how to accurately identify the vibration source is the premise of vibration reduction. For the problem that the number of observed signals is not less than the number of source signals is not easy to meet in the blind separation of vibration sources, in this paper, the empirical wavelet transform (EWT) and fast independent component analysis (FastICA) are used to identify vibration sources of internal combustion engines. Firstly, the time domain synchronous average technique is used to preprocess vibration signal of the internal combustion engines cylinder head, and then experience the wavelet transform, next the Pearson correlation coefficient is used to choose effective empirical mode component as fast independent component analysis (FastICA) input, and finally the separation results show that this method can effectively identify the combustion gas signal and the valve body opens gas combustion impact signal from the internal combustion engines cylinder head vibration signal.
The internal combustion engine is widely used in engineering, power and other fields. However, due to combustion impact, mechanic vibration and the complexity of its structure, the vibration and noise reduction of internal combustion engines has always been a focus of research, and especially how to accurately identify the vibration source is the premise of vibration reduction. For the problem that the number of observed signals is not less than the number of source signals is not easy to meet in the blind separation of vibration sources, in this paper, the empirical wavelet transform (EWT) and fast independent component analysis (FastICA) are used to identify vibration sources of internal combustion engines. Firstly, the time domain synchronous average technique is used to preprocess vibration signal of the internal combustion engines cylinder head, and then experience the wavelet transform, next the Pearson correlation coefficient is used to choose effective empirical mode component as fast independent component analysis (FastICA) input, and finally the separation results show that this method can effectively identify the combustion gas signal and the valve body opens gas combustion impact signal from the internal combustion engines cylinder head vibration signal.







2021, 40(5): 749-754.
doi: 10.13433/j.cnki.1003-8728.20200069
Abstract:
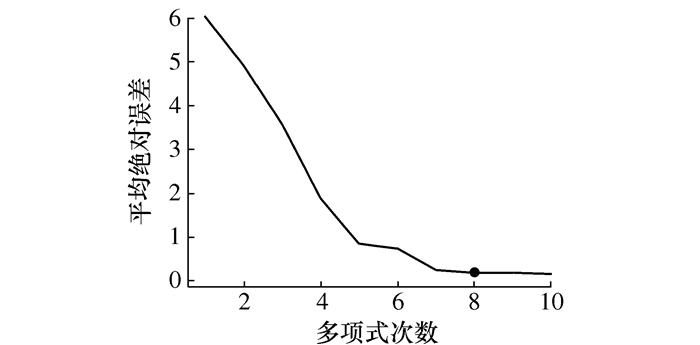
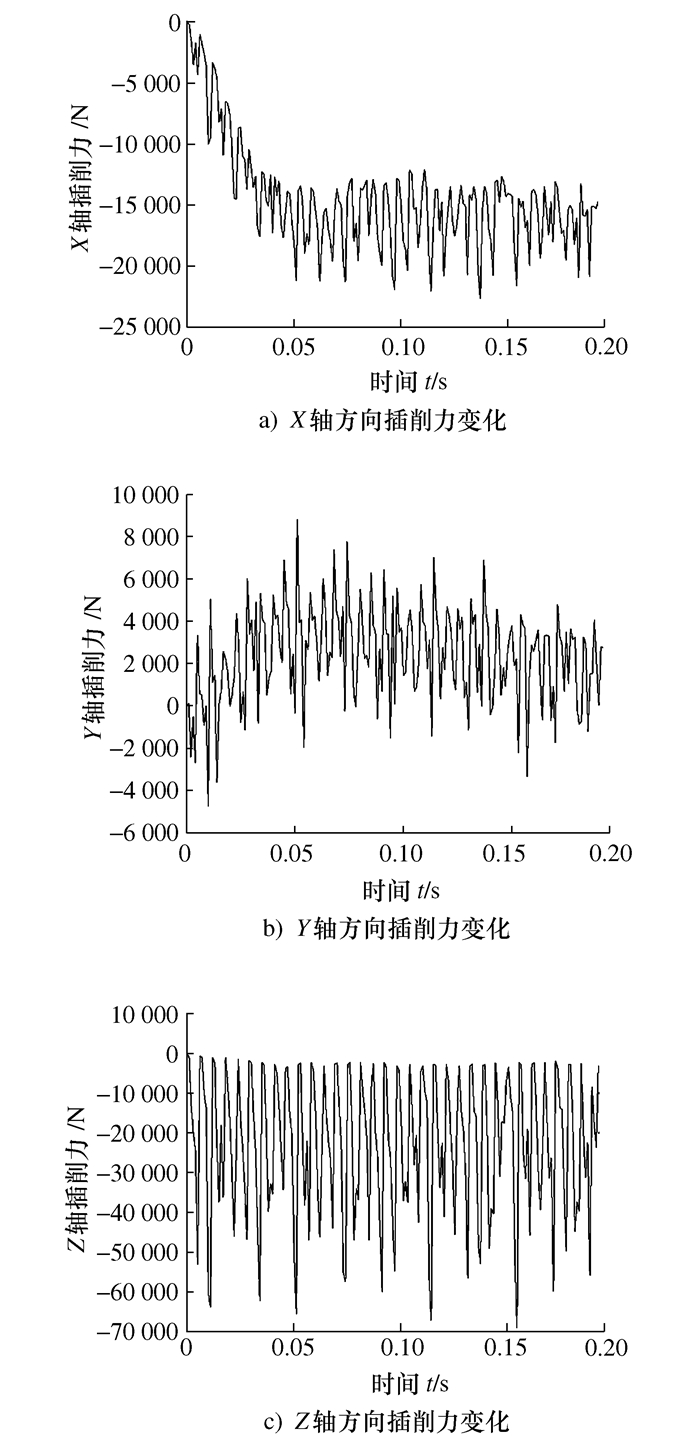
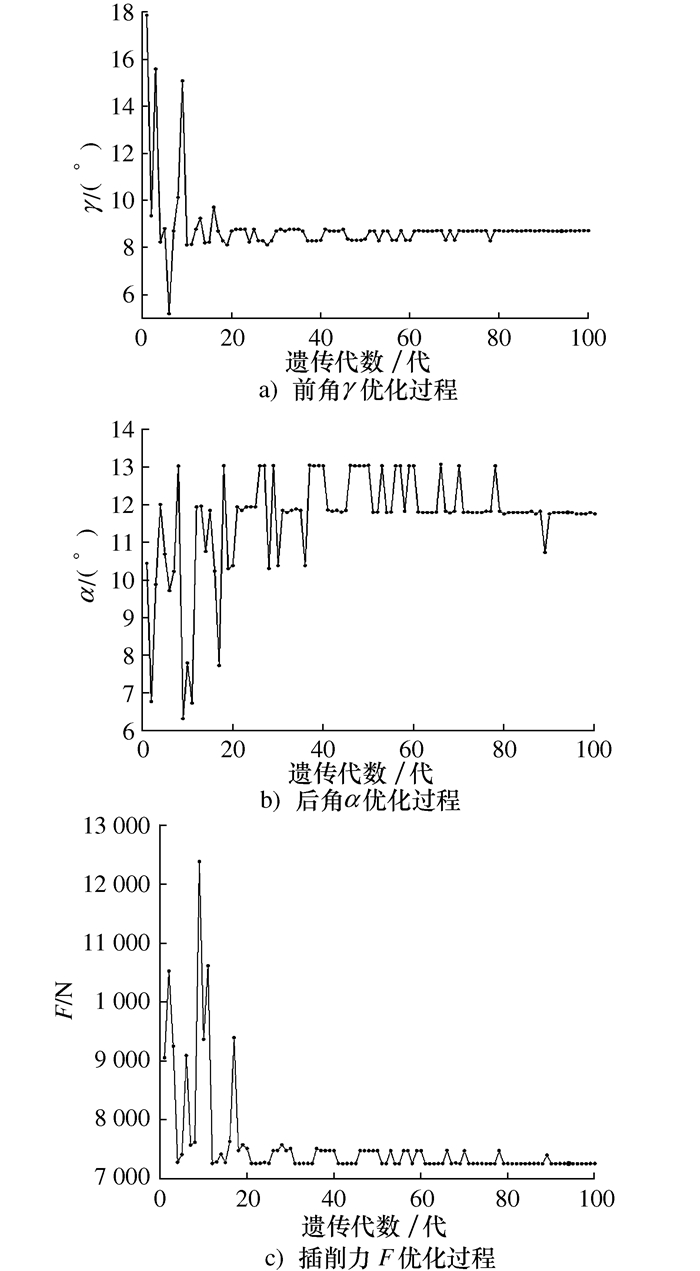
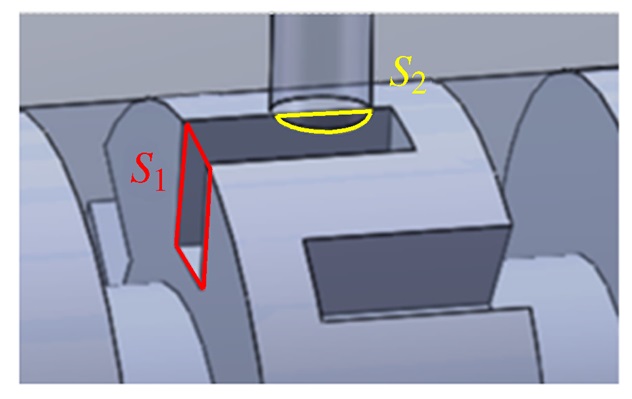
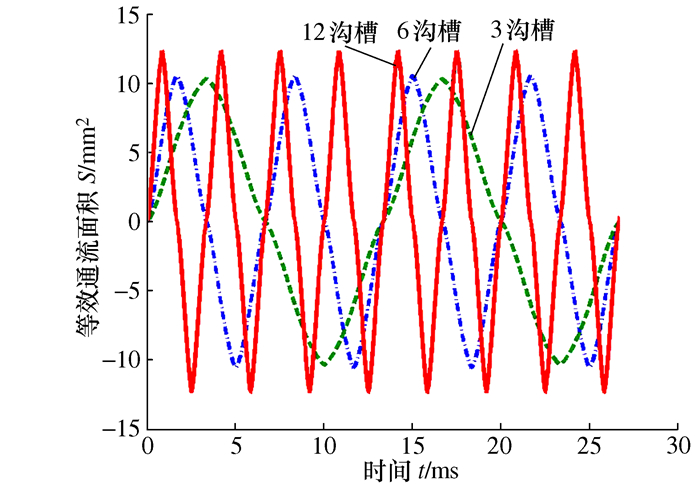
Aiming at the problem that the tooth shape accuracy is not high due to the excessive cutting force during the machining of the thin-walled ring gear, the geometrical parameters of the gear shaper cutter are one of the factors affecting the cutting force. The geometric parameters are optimized to reduce the cutting force and improve the accuracy of the tooth profile. The gear ring and the tool were constructed via UG, in which the model was introduced into ABAQUS to simulate the machining process of the gear shaping process, and the cutting force in the tooth cutting was obtained. The geometric parameters of the shaper cutter are used as input variables, and the cutting force of the gear insertion process is used as the output response. The sample points are designed by optimizing the Latin hypercube experimental design method, and the model is established with the response surface approximation model, the geometric parameters of different gear shaper cutters are optimized by multi Island genetic algorithm. The results show that the response surface model can effectively fit the function relationship between the geometric parameters of gear shaper cutter and the cutting force. Through the optimization of multi Island genetic algorithm, the cutting force is reduced by 34.87%, and the optimization effect is significant. It is of great significance for studying the problem that the too large cutting force causes the low accuracy of gear ring profile.
Aiming at the problem that the tooth shape accuracy is not high due to the excessive cutting force during the machining of the thin-walled ring gear, the geometrical parameters of the gear shaper cutter are one of the factors affecting the cutting force. The geometric parameters are optimized to reduce the cutting force and improve the accuracy of the tooth profile. The gear ring and the tool were constructed via UG, in which the model was introduced into ABAQUS to simulate the machining process of the gear shaping process, and the cutting force in the tooth cutting was obtained. The geometric parameters of the shaper cutter are used as input variables, and the cutting force of the gear insertion process is used as the output response. The sample points are designed by optimizing the Latin hypercube experimental design method, and the model is established with the response surface approximation model, the geometric parameters of different gear shaper cutters are optimized by multi Island genetic algorithm. The results show that the response surface model can effectively fit the function relationship between the geometric parameters of gear shaper cutter and the cutting force. Through the optimization of multi Island genetic algorithm, the cutting force is reduced by 34.87%, and the optimization effect is significant. It is of great significance for studying the problem that the too large cutting force causes the low accuracy of gear ring profile.



2021, 40(5): 755-761.
doi: 10.13433/j.cnki.1003-8728.20200129
Abstract:
To explore the material removal mechanism in grinding of nickel-based alloy, the external profile and distribution of grits on the surface of the grinding wheel is geometrical modeled with the random arc segmentation method. By using the parallel bond bonding linear calibration method, the discrete element model for nickel-based alloy is calibrated; a dynamic simulation test of nickel-based alloy grinding is established with abrasive grains. The simulation results show that the grinding force fluctuates dynamically and the tangential force and normal force decrease with the increasing of grinding grain edges. With the increasing of grinding wheel speed, the tangential force and normal force are decreased. The simulation methods and results have a reference for studying the material removal mechanism during the grinding of nickel-based alloys.
To explore the material removal mechanism in grinding of nickel-based alloy, the external profile and distribution of grits on the surface of the grinding wheel is geometrical modeled with the random arc segmentation method. By using the parallel bond bonding linear calibration method, the discrete element model for nickel-based alloy is calibrated; a dynamic simulation test of nickel-based alloy grinding is established with abrasive grains. The simulation results show that the grinding force fluctuates dynamically and the tangential force and normal force decrease with the increasing of grinding grain edges. With the increasing of grinding wheel speed, the tangential force and normal force are decreased. The simulation methods and results have a reference for studying the material removal mechanism during the grinding of nickel-based alloys.







2021, 40(5): 762-768.
doi: 10.13433/j.cnki.1003-8728.20200105
Abstract:
In order to improve the efficiency of assembly simulation and to meet the requirements of assembly process, a classification assembly sequence planning method based on location relationship analysis is proposed. Firstly, the assembly feature attributions of the parts are pre-defined and classified, then according to the connection relationship of the assembly parts, the locating relationship among all adjacent parts in the feasible disassembly direction is established. Repeat the interference detection of the parts in each positioning chain and update the locating relationship in the order of the positioning chain to obtain a feasible assembly sequence finally. The simulation experiment indicates that the method simplifies the assembly relationship of the model and reduces the assembly sequence solution space, and can improve the assembly planning efficiency to a certain extent. The virtual disassembly simulation example verifies the correctness and feasibility of the generated sequence.
In order to improve the efficiency of assembly simulation and to meet the requirements of assembly process, a classification assembly sequence planning method based on location relationship analysis is proposed. Firstly, the assembly feature attributions of the parts are pre-defined and classified, then according to the connection relationship of the assembly parts, the locating relationship among all adjacent parts in the feasible disassembly direction is established. Repeat the interference detection of the parts in each positioning chain and update the locating relationship in the order of the positioning chain to obtain a feasible assembly sequence finally. The simulation experiment indicates that the method simplifies the assembly relationship of the model and reduces the assembly sequence solution space, and can improve the assembly planning efficiency to a certain extent. The virtual disassembly simulation example verifies the correctness and feasibility of the generated sequence.
















2021, 40(5): 769-774.
doi: 10.13433/j.cnki.1003-8728.20200068
Abstract:
The paper studies the influence of the structure of an active rotary valve spool and its size on the flow characteristics of the actuator. Firstly, its structure and working principles are introduced. Next, its mathematical model is established with the MATLAB/Simulink software. The relationship between the output flow rate of the actuator and the phase angle of driving signals at different driving frequencies is obtained with the simulation. Compared with other simulation results, the accuracy of our simulation results is verified to be better. Then the effects of different groove depths and the number of grooves (under the condition of fixed spool′s diameter and variable spool′s diameter) on the output flow rate of the actuator is simulated and the simulation results are analysed.
The paper studies the influence of the structure of an active rotary valve spool and its size on the flow characteristics of the actuator. Firstly, its structure and working principles are introduced. Next, its mathematical model is established with the MATLAB/Simulink software. The relationship between the output flow rate of the actuator and the phase angle of driving signals at different driving frequencies is obtained with the simulation. Compared with other simulation results, the accuracy of our simulation results is verified to be better. Then the effects of different groove depths and the number of grooves (under the condition of fixed spool′s diameter and variable spool′s diameter) on the output flow rate of the actuator is simulated and the simulation results are analysed.









2021, 40(5): 775-779.
doi: 10.13433/j.cnki.1003-8728.20200098
Abstract:
The accuracy of hot film gas flow sensor may be seriously affected when contaminants are accumulated on the chip of a sensor. The experimental study indicates that when the sensor is energized, the electric field force on the surface of the chip is the main cause for the absorption and accumulation of contaminant particles. Therefore, the amount of charge of contaminant particles has a direct influence on the accumulation of particles on the surface of the chip. In this paper, the average size and charge of the particle group are measured by a Mastersizer 2000 laser particle size analyzer and a Millikan oil-drop apparatus. The average size of the particles measured by the laser particle size analyzer is 3.311 μm. Based on the average particle size, the average charge of particles in the range of 3.2 μm and 3.4 μm is 6.4×10-17 C as measured by the Millikan oil-drop apparatus. This charge is the average charge of the particle group.
The accuracy of hot film gas flow sensor may be seriously affected when contaminants are accumulated on the chip of a sensor. The experimental study indicates that when the sensor is energized, the electric field force on the surface of the chip is the main cause for the absorption and accumulation of contaminant particles. Therefore, the amount of charge of contaminant particles has a direct influence on the accumulation of particles on the surface of the chip. In this paper, the average size and charge of the particle group are measured by a Mastersizer 2000 laser particle size analyzer and a Millikan oil-drop apparatus. The average size of the particles measured by the laser particle size analyzer is 3.311 μm. Based on the average particle size, the average charge of particles in the range of 3.2 μm and 3.4 μm is 6.4×10-17 C as measured by the Millikan oil-drop apparatus. This charge is the average charge of the particle group.







2021, 40(5): 780-786.
doi: 10.13433/j.cnki.1003-8728.20200115
Abstract:
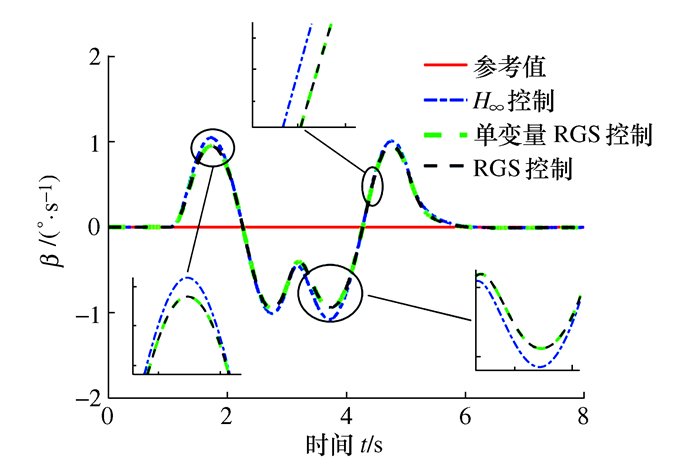
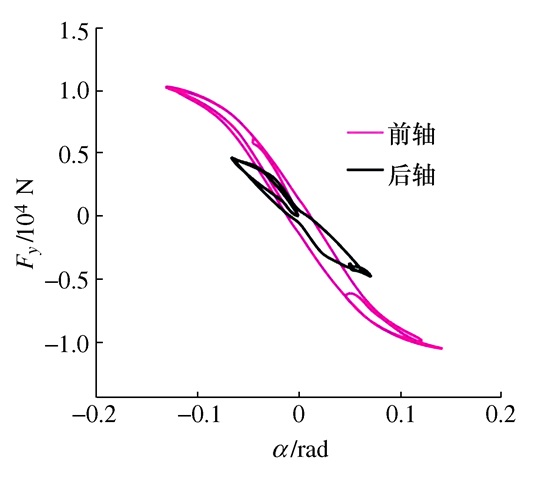
The handling stability of a four-hub-motor independent drive electric vehicle is investigated while the vehicle speed and tire cornering stiffness change. To deal with the time-varying longitudinal speed, a linear parameter varying (LPV) model that uses the vehicle speed as the scheduling variable is built. Based on this, a robust gain scheduled controller is designed to ensure the vehicle safety. Besides, considering the nonlinearity of tire, a controller scheduling strategy is presented; the controller output is weighted by the estimated vehicle slip angle to adapt better to the change of tire cornering stiffness and adjust its control variable in real time. The simulation results show that the scheduling strategy can effectively improve the vehicle performance while the vehicle speed and nonlinear tire cornering stiffness change.
The handling stability of a four-hub-motor independent drive electric vehicle is investigated while the vehicle speed and tire cornering stiffness change. To deal with the time-varying longitudinal speed, a linear parameter varying (LPV) model that uses the vehicle speed as the scheduling variable is built. Based on this, a robust gain scheduled controller is designed to ensure the vehicle safety. Besides, considering the nonlinearity of tire, a controller scheduling strategy is presented; the controller output is weighted by the estimated vehicle slip angle to adapt better to the change of tire cornering stiffness and adjust its control variable in real time. The simulation results show that the scheduling strategy can effectively improve the vehicle performance while the vehicle speed and nonlinear tire cornering stiffness change.












2021, 40(5): 787-793.
doi: 10.13433/j.cnki.1003-8728.20200071
Abstract:
Aiming at the problem of improving pantograph-catenary contact force of rail transit trains under uncertain conditions, a pantograph semi-active control method based on the interval type-2 fuzzy PID (IT2F-PID) was proposed for the first time. Firstly, a three-degree-of-freedom pantograph-catenary semi-active control model is established. Secondly, the IT2F-PID semi-active controller is designed, and the control effect of the pantograph-catenary contact force is compared with the type-1 fuzzy PID (T1F-PID) and PID semi-active controllers. The problems of model uncertainty and external disturbance of the pantograph are further considered. Finally, the DSA380 pantograph was used as the object for simulation experiment verification. The results show that: when the trains run at 200 km/h and 300 km/h, compared with the passive control methods, the standard deviations of the pantograph-catenary contact force under the IT2F-PID semi-active control algorithm are reduced by 18.21% and 24.91%, respectively, and the quality of pantograph-catenary current can be effectively improved. In addition, compared with active control methods, the designed semi-active controller has the advantages of less energy required for the outside world, and has stronger ability to deal with model uncertainty and anti-disturbance.
Aiming at the problem of improving pantograph-catenary contact force of rail transit trains under uncertain conditions, a pantograph semi-active control method based on the interval type-2 fuzzy PID (IT2F-PID) was proposed for the first time. Firstly, a three-degree-of-freedom pantograph-catenary semi-active control model is established. Secondly, the IT2F-PID semi-active controller is designed, and the control effect of the pantograph-catenary contact force is compared with the type-1 fuzzy PID (T1F-PID) and PID semi-active controllers. The problems of model uncertainty and external disturbance of the pantograph are further considered. Finally, the DSA380 pantograph was used as the object for simulation experiment verification. The results show that: when the trains run at 200 km/h and 300 km/h, compared with the passive control methods, the standard deviations of the pantograph-catenary contact force under the IT2F-PID semi-active control algorithm are reduced by 18.21% and 24.91%, respectively, and the quality of pantograph-catenary current can be effectively improved. In addition, compared with active control methods, the designed semi-active controller has the advantages of less energy required for the outside world, and has stronger ability to deal with model uncertainty and anti-disturbance.











2021, 40(5): 794-800.
doi: 10.13433/j.cnki.1003-8728.20200119
Abstract:
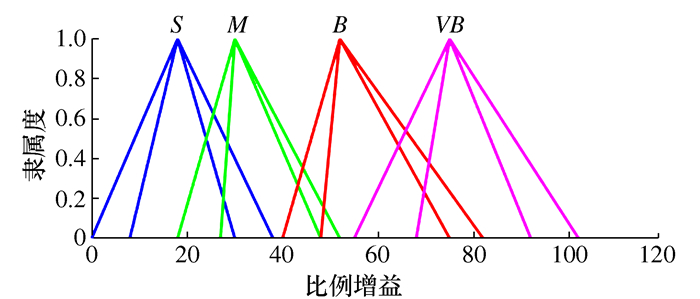
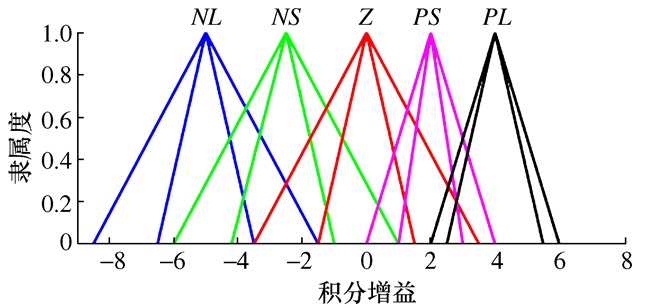
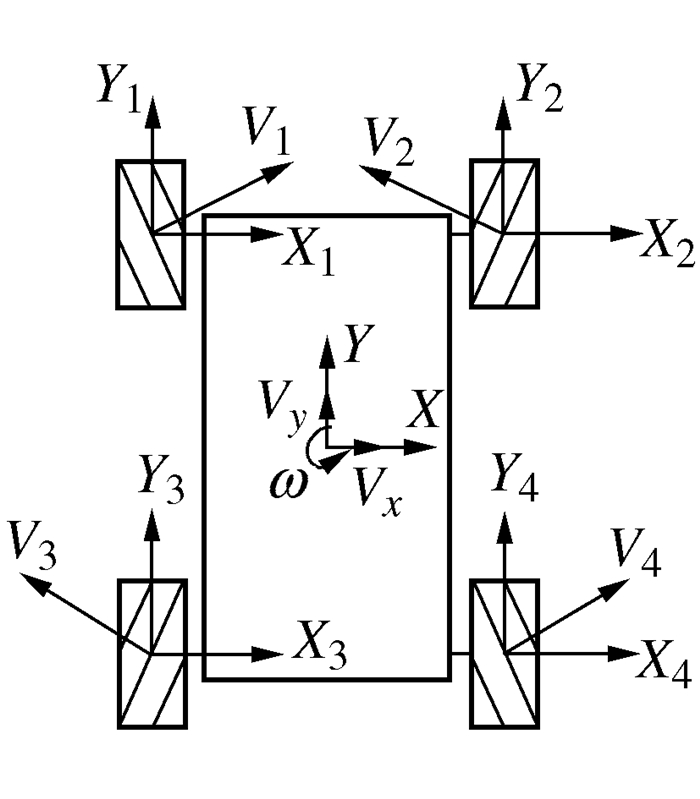
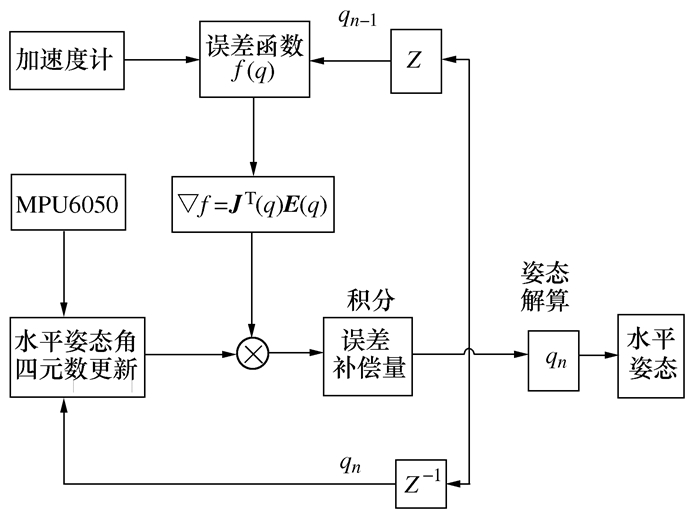
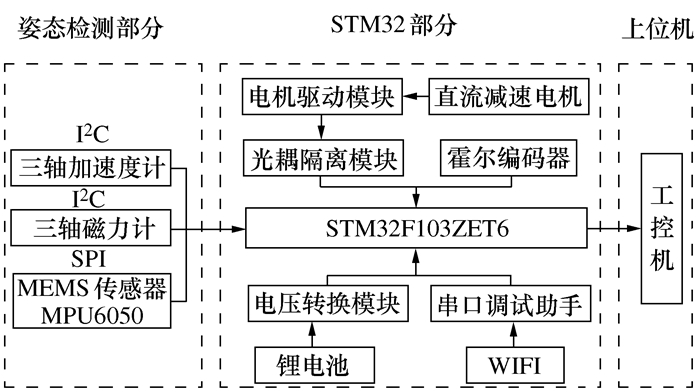
As a single MEMS gyroscope can not solve the problems that it is easy to diverge and the magnetometer is easy to be interfered by the magnetic field, which lead to the introduction of new noise and the inaccurate attitude estimation, a new attitude estimation method based on omnidirectional AGV is proposed in this paper. According to this method, the yaw angle does not participate in the quaternion solution; on the basis of the quaternion algorithm of the horizontal attitude angle, the conjugate gradient method is used to reduce the drift error of the gyroscope. Then, the data of magnetometer modified by ellipsoid is introduced as the observation data, which is fused with yaw angle by first-order complementary filtering, and the weighting factor is determined. An omnidirectional AGV experiment platform based on STM32 and MEMS sensor is built up. The experimental results show that this method can effectively suppress the divergence of gyroscope and the interference of magnetometer, improve the accuracy of attitude algorithm, make the attitude algorithm have good dynamic and static performances, and ensure the stability of the system.
As a single MEMS gyroscope can not solve the problems that it is easy to diverge and the magnetometer is easy to be interfered by the magnetic field, which lead to the introduction of new noise and the inaccurate attitude estimation, a new attitude estimation method based on omnidirectional AGV is proposed in this paper. According to this method, the yaw angle does not participate in the quaternion solution; on the basis of the quaternion algorithm of the horizontal attitude angle, the conjugate gradient method is used to reduce the drift error of the gyroscope. Then, the data of magnetometer modified by ellipsoid is introduced as the observation data, which is fused with yaw angle by first-order complementary filtering, and the weighting factor is determined. An omnidirectional AGV experiment platform based on STM32 and MEMS sensor is built up. The experimental results show that this method can effectively suppress the divergence of gyroscope and the interference of magnetometer, improve the accuracy of attitude algorithm, make the attitude algorithm have good dynamic and static performances, and ensure the stability of the system.





2021, 40(5): 801-807.
doi: 10.13433/j.cnki.1003-8728.20200311
Abstract:
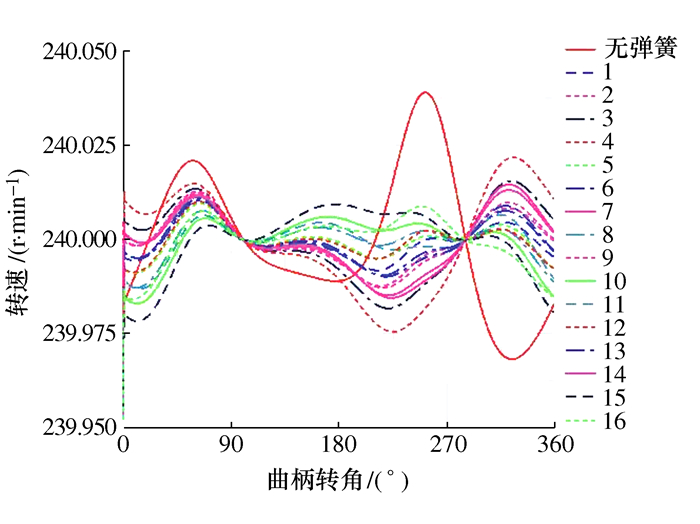
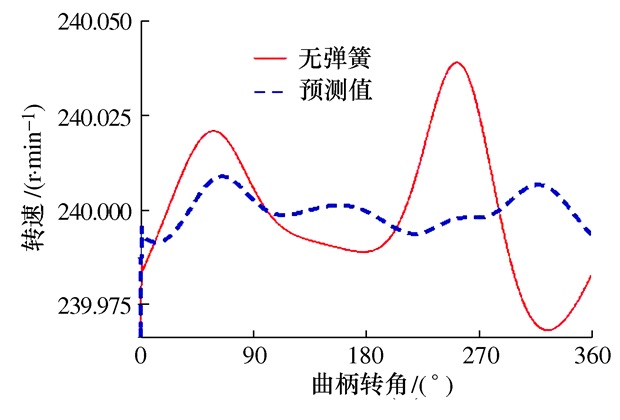
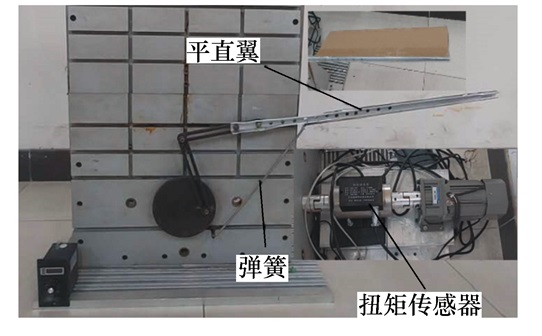
This article uses prototype model developed by the mechanical systems laboratory of University of Delaware. This model uses crank rocker mechanism. The wings will produce periodic fluctuation under aerodynamic force and inertial force in operation, which will easily cause the increased speed fluctuation of motor. The factors affect the smooth operation of mechanism, which will generate vibration and noise. The spring elements can effectively reduce speed fluctuation in simulation, using orthogonal test design method to conduct range analysis of the factors. It is concluded that position of the spring connection is the main factor, the spring stiffness coefficient is second factor, the spring original length is third factor. The physical experiment platform was set up to verify correct simulation results and orthogonal experimental design method.
This article uses prototype model developed by the mechanical systems laboratory of University of Delaware. This model uses crank rocker mechanism. The wings will produce periodic fluctuation under aerodynamic force and inertial force in operation, which will easily cause the increased speed fluctuation of motor. The factors affect the smooth operation of mechanism, which will generate vibration and noise. The spring elements can effectively reduce speed fluctuation in simulation, using orthogonal test design method to conduct range analysis of the factors. It is concluded that position of the spring connection is the main factor, the spring stiffness coefficient is second factor, the spring original length is third factor. The physical experiment platform was set up to verify correct simulation results and orthogonal experimental design method.





2021, 40(5): 808-815.
doi: 10.13433/j.cnki.1003-8728.20200116
Abstract:
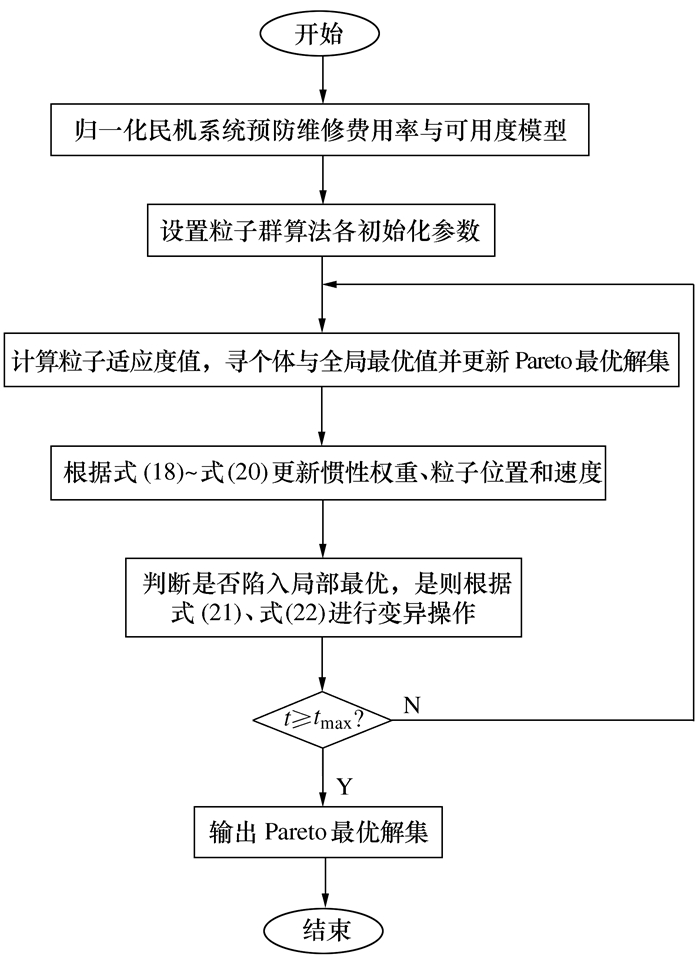
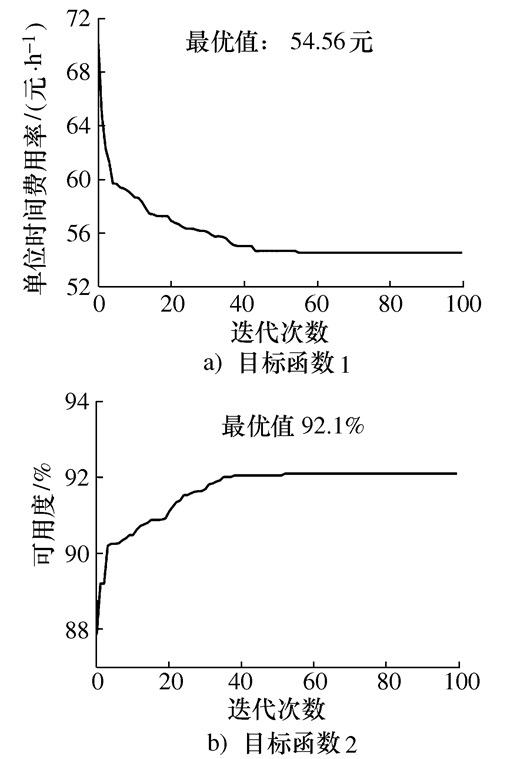
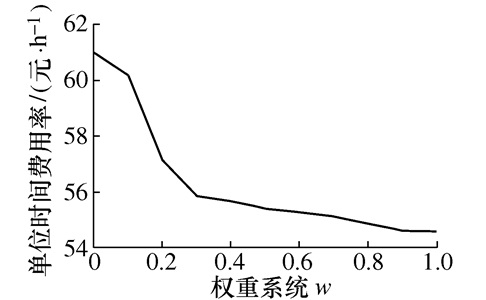
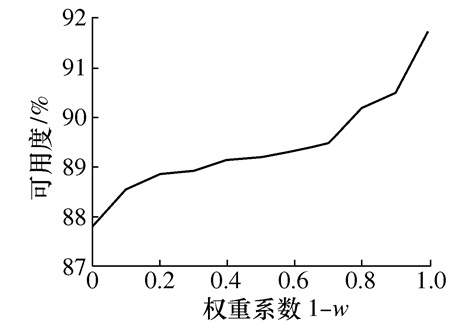
The research on the maintenance strategy optimization of civil aircraft multi-component series system has important practical significance at this stage. A multi-objective optimization model for incomplete preventive maintenance of civil aircraft multi-component systems was constructed with the system unit time cost rate and availability as the goals. Introducing the opportunistic maintenance strategy, the component opportunistic maintenance reliability threshold is used as a model optimization variable, and the component maintenance methods are optimized and combined according to time correlation and structure correlation. The method employs an improved adaptive mutation particle swarm optimization (AM-PSO) to solve the Pareto optimal solution set. Using the actual maintenance data of an engine′s back-thrusting control and instruction system for civil aircraft for model verification and analysis, the results show that the multi-objective optimization model and method of this paper can effectively reduce system maintenance costs for preventive maintenance activities in a limited operating cycle, and meanwhile can increase availability of civil aircraft.
The research on the maintenance strategy optimization of civil aircraft multi-component series system has important practical significance at this stage. A multi-objective optimization model for incomplete preventive maintenance of civil aircraft multi-component systems was constructed with the system unit time cost rate and availability as the goals. Introducing the opportunistic maintenance strategy, the component opportunistic maintenance reliability threshold is used as a model optimization variable, and the component maintenance methods are optimized and combined according to time correlation and structure correlation. The method employs an improved adaptive mutation particle swarm optimization (AM-PSO) to solve the Pareto optimal solution set. Using the actual maintenance data of an engine′s back-thrusting control and instruction system for civil aircraft for model verification and analysis, the results show that the multi-objective optimization model and method of this paper can effectively reduce system maintenance costs for preventive maintenance activities in a limited operating cycle, and meanwhile can increase availability of civil aircraft.



2021, 40(5): 816-820.
doi: 10.13433/j.cnki.1003-8728.20200112
Abstract:
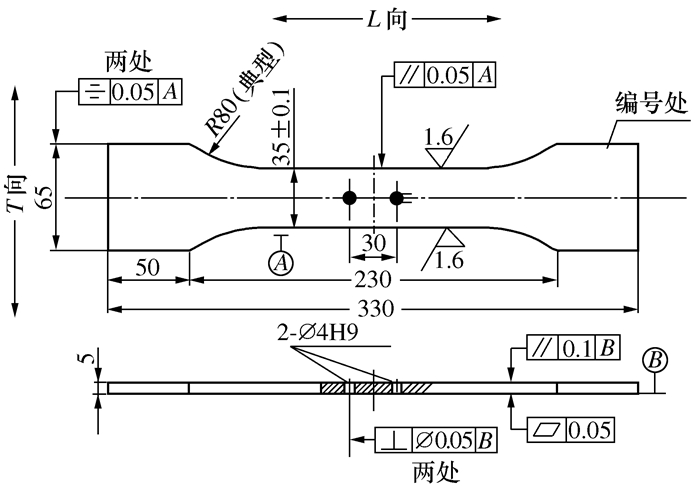
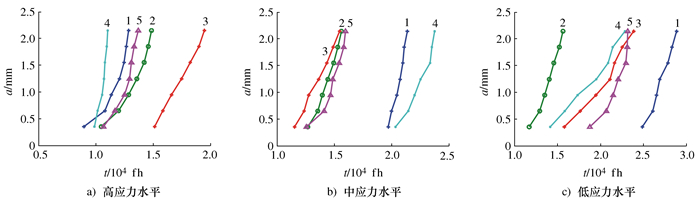
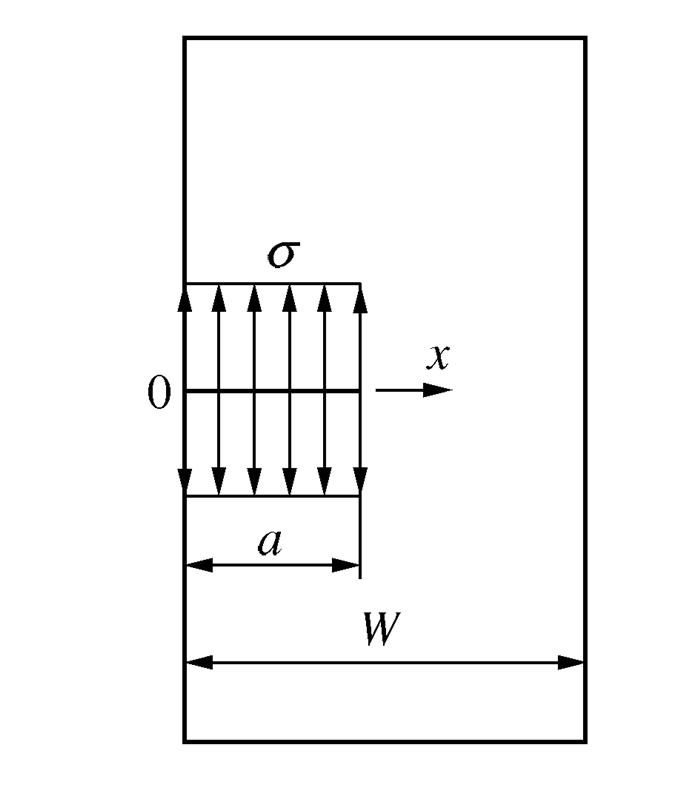
For the representative structure detail of titanium alloy applied in aeronautical engineering structure, the durability is analyzed by using the initial fatigue quality method. The durability tests of the representative structure detail of titanium alloy under 3 stress levels are performed on Instron8802 test machine. The crack growth data of the representative structure detail is obtained by analyzing the fracture via electron microscope. The probabilistic characteristics for the time of crack initiation (TTCI) and equivalent initial flaw size (EIFS) are achieved with the statistical analysis of test data. Then, the 95% reliability fatigue life is predicted via initial fatigue quality method. Besides, the 95% reliability EIFS is also calculated based on EIFS distribution. Results show that the representative structure detail of titanium alloy meets the requirement of durability design.
For the representative structure detail of titanium alloy applied in aeronautical engineering structure, the durability is analyzed by using the initial fatigue quality method. The durability tests of the representative structure detail of titanium alloy under 3 stress levels are performed on Instron8802 test machine. The crack growth data of the representative structure detail is obtained by analyzing the fracture via electron microscope. The probabilistic characteristics for the time of crack initiation (TTCI) and equivalent initial flaw size (EIFS) are achieved with the statistical analysis of test data. Then, the 95% reliability fatigue life is predicted via initial fatigue quality method. Besides, the 95% reliability EIFS is also calculated based on EIFS distribution. Results show that the representative structure detail of titanium alloy meets the requirement of durability design.