Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2021 Vol. 40, No. 6
Display Method:
2021, 40(6): 821-827.
doi: 10.13433/j.cnki.1003-8728.20200336
 PDF 4389KB
PDF 4389KB
Abstract:
Aiming at the problems that the current wall-climbing robots are too heavy and the fuselage structure is too complicated, a variable-density topology optimization method for wall-climbing robot adsorption structure is proposed. Through the three-dimensional modeling of the main structural components whose weight have great influence when the wall-climbing robot is adsorbed on the wall surface, the variable density topology optimization method is introduced to optimize the structure of the selected components in Ansys Workbench software. We set the boundary conditions and loads according to the actual working conditions of the robot, and reasonably remove the areas in the main parts of the wall-climbing robot that have little effect on the structural strength. The model is reconstructed according to the optimization results and compared with the original structural model for the stress analysis, so as to achieve topological optimization of the main structure of the wall-climbing robot. The optimized adsorption surface structure and the original adsorption surface structure were compared in ANSYS to achieve the purpose of lightweight on the basis of ensuring the consistent strength of the bottom plate of the wall-climbing robot, which is helpful to improve the flexibility and motion control ability of the wall-climbing robot.
Aiming at the problems that the current wall-climbing robots are too heavy and the fuselage structure is too complicated, a variable-density topology optimization method for wall-climbing robot adsorption structure is proposed. Through the three-dimensional modeling of the main structural components whose weight have great influence when the wall-climbing robot is adsorbed on the wall surface, the variable density topology optimization method is introduced to optimize the structure of the selected components in Ansys Workbench software. We set the boundary conditions and loads according to the actual working conditions of the robot, and reasonably remove the areas in the main parts of the wall-climbing robot that have little effect on the structural strength. The model is reconstructed according to the optimization results and compared with the original structural model for the stress analysis, so as to achieve topological optimization of the main structure of the wall-climbing robot. The optimized adsorption surface structure and the original adsorption surface structure were compared in ANSYS to achieve the purpose of lightweight on the basis of ensuring the consistent strength of the bottom plate of the wall-climbing robot, which is helpful to improve the flexibility and motion control ability of the wall-climbing robot.


















2021, 40(6): 828-834.
doi: 10.13433/j.cnki.1003-8728.20200121
Abstract:
In order to investigate the wear behaviour of the involute spline pair under the fretting conditions, the wear experiments were performed on the spline pair material 20CrMoH, and the wear coefficients of the spline pair material 20CrMoH under different conditions were obtained. The experimental results show that in the same case, the fretting wear coefficient of the material increases with the increasing of normal pressure; under the same normal pressure, the fretting wear coefficient of the material increases with the increasing of vibration frequency. The method of combining the finite element method with the Archard theory was used to predict the wear of the spline pair material, and the comparison with the wear testing results verified the feasibility of the prediction method. In order to find the methods and ideas for improving the tooth surface wear of spline pairs, optimize the parameters of the spline pairs, and seek the best combination of the three parameters of backlash, shape modification, and angle with the goal of minimizing the amount of tooth surface wear of the spline pairs, it is obtained that the spline pair has a minimum wear amount when processing design and installation with a side clearance of 0.09 mm, drum shape modification amount of 22.66 μm, and an included angle of 0.04°.
In order to investigate the wear behaviour of the involute spline pair under the fretting conditions, the wear experiments were performed on the spline pair material 20CrMoH, and the wear coefficients of the spline pair material 20CrMoH under different conditions were obtained. The experimental results show that in the same case, the fretting wear coefficient of the material increases with the increasing of normal pressure; under the same normal pressure, the fretting wear coefficient of the material increases with the increasing of vibration frequency. The method of combining the finite element method with the Archard theory was used to predict the wear of the spline pair material, and the comparison with the wear testing results verified the feasibility of the prediction method. In order to find the methods and ideas for improving the tooth surface wear of spline pairs, optimize the parameters of the spline pairs, and seek the best combination of the three parameters of backlash, shape modification, and angle with the goal of minimizing the amount of tooth surface wear of the spline pairs, it is obtained that the spline pair has a minimum wear amount when processing design and installation with a side clearance of 0.09 mm, drum shape modification amount of 22.66 μm, and an included angle of 0.04°.

















2021, 40(6): 835-839.
doi: 10.13433/j.cnki.1003-8728.20200161
Abstract:
Based on the in-situ data and the analysis of its time series properties, this paper proposes a prediction method of advance rate based on the Recurrent Neural Network(RNN) method, and verifies the effectiveness of the proposed method in the practical engineering example of Tianjin Metro Line 9. The prediction performances of other methods, such as Simple RNN, Long Short-Term Memory (LSTM) and Gated Recurrent Unit (GRU) are discussed and compared. The results show that the prediction method of TBM's advance rate based on RNN proposed in this paper can better analyze the sequence properties of the accumulated engineering measured data in tunneling, so as to predict the tunneling rate ahead, and show better prediction performance than the LSTM and GRU methods with ″gate″ properties.
Based on the in-situ data and the analysis of its time series properties, this paper proposes a prediction method of advance rate based on the Recurrent Neural Network(RNN) method, and verifies the effectiveness of the proposed method in the practical engineering example of Tianjin Metro Line 9. The prediction performances of other methods, such as Simple RNN, Long Short-Term Memory (LSTM) and Gated Recurrent Unit (GRU) are discussed and compared. The results show that the prediction method of TBM's advance rate based on RNN proposed in this paper can better analyze the sequence properties of the accumulated engineering measured data in tunneling, so as to predict the tunneling rate ahead, and show better prediction performance than the LSTM and GRU methods with ″gate″ properties.







2021, 40(6): 840-845.
doi: 10.13433/j.cnki.1003-8728.20200122
Abstract:
This paper studies the 6R dual-arm service robot independently developed by lab personnel and finds the forward kinematics solution according to Denavit-Hartenberg(D-H) parameters. It uses the Monte Carlo method to get its working space and extract the common area points set within the allowable error range. It proposes to quantify the size of collaborative space volume using the number of space cloud points. To get the maximum collaborative space volume, this paper iteratively searches for the optimal mechanical parameters of the robot arm. The results show that it is of great significance to optimize the mechanism parameters of the robot in order to get the largest cooperation space of the dual arm robot within the constraints of its joints, thus laying the foundation for coordinated operations.
This paper studies the 6R dual-arm service robot independently developed by lab personnel and finds the forward kinematics solution according to Denavit-Hartenberg(D-H) parameters. It uses the Monte Carlo method to get its working space and extract the common area points set within the allowable error range. It proposes to quantify the size of collaborative space volume using the number of space cloud points. To get the maximum collaborative space volume, this paper iteratively searches for the optimal mechanical parameters of the robot arm. The results show that it is of great significance to optimize the mechanism parameters of the robot in order to get the largest cooperation space of the dual arm robot within the constraints of its joints, thus laying the foundation for coordinated operations.






2021, 40(6): 846-852.
doi: 10.13433/j.cnki.1003-8728.20200130
Abstract:
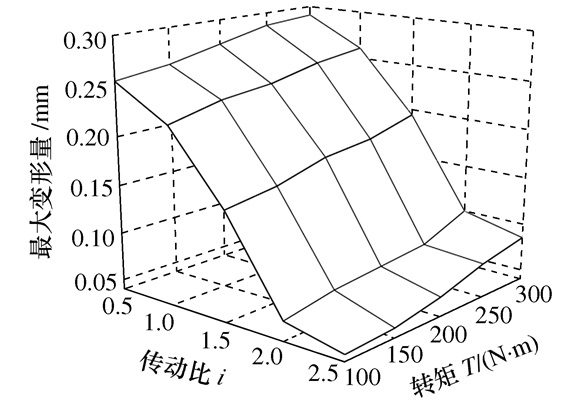
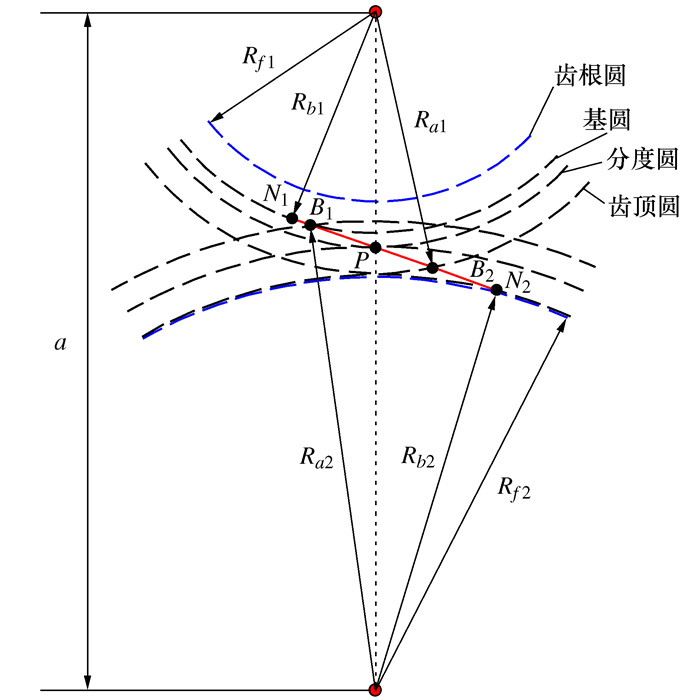
The pulley deformation of metal belt continuously variable transmission (CVT) causes the metal belt to shift radially along the cone surface of the pulley, thereby causing friction losses in the system and seriously affecting the transmission efficiency of the transmission mechanism. In this paper, a domestic CVT is taken as the research object, a model for metal belt deformation friction loss is established and the ANSYS finite element software was used to simulate and analyze the transmission part of the metal belt continuously variable transmission. The analysis results show that the speed ratio is the main factor affecting the pulley deformation. As the working radius decreases gradually, the maximum deformation of the tapered surface of the pulley decreases. At the same time, it can be seen from the friction loss model that the maximum deformation amount occurring on the working radius of the pulley is the main factor affecting the friction loss. The friction loss of the pulley reaches its maximum when the transmission is relatively large or small. And as the input torque increases, the friction loss also increases.
The pulley deformation of metal belt continuously variable transmission (CVT) causes the metal belt to shift radially along the cone surface of the pulley, thereby causing friction losses in the system and seriously affecting the transmission efficiency of the transmission mechanism. In this paper, a domestic CVT is taken as the research object, a model for metal belt deformation friction loss is established and the ANSYS finite element software was used to simulate and analyze the transmission part of the metal belt continuously variable transmission. The analysis results show that the speed ratio is the main factor affecting the pulley deformation. As the working radius decreases gradually, the maximum deformation of the tapered surface of the pulley decreases. At the same time, it can be seen from the friction loss model that the maximum deformation amount occurring on the working radius of the pulley is the main factor affecting the friction loss. The friction loss of the pulley reaches its maximum when the transmission is relatively large or small. And as the input torque increases, the friction loss also increases.















2021, 40(6): 853-862.
doi: 10.13433/j.cnki.1003-8728.20200132
Abstract:
With good environmental adaptability, high efficiency, high production quality and 7×24 working mode, industrial robots are widely used in the automated manufacturing such as spraying, welding, palletizing and handling. Trajectory planning is the basis for the motion control of the industrial robot to complete the task, and directly determines the quality of the robot's work. In order to fully understand the current research methods of trajectory planning, the basic process of trajectory planning is firstly expounded, and the existing trajectory planning methods is classified in terms of the different principles. The performance characteristics of the interpolation curve functions, optimal trajectory planning and solving algorithm are analyzed and summarized in detail. Finally, the existing problems of the trajectory planning for constructing the interpolation curve and the solving algorithm are analyzed and discussed, and the developmental trend of trajectory planning is predicted.
With good environmental adaptability, high efficiency, high production quality and 7×24 working mode, industrial robots are widely used in the automated manufacturing such as spraying, welding, palletizing and handling. Trajectory planning is the basis for the motion control of the industrial robot to complete the task, and directly determines the quality of the robot's work. In order to fully understand the current research methods of trajectory planning, the basic process of trajectory planning is firstly expounded, and the existing trajectory planning methods is classified in terms of the different principles. The performance characteristics of the interpolation curve functions, optimal trajectory planning and solving algorithm are analyzed and summarized in detail. Finally, the existing problems of the trajectory planning for constructing the interpolation curve and the solving algorithm are analyzed and discussed, and the developmental trend of trajectory planning is predicted.


2021, 40(6): 863-869.
doi: 10.13433/j.cnki.1003-8728.20200138
Abstract:
Aiming at the weak impact features in the incipient stage of rolling bearing faults and the difficulty in fault-related information extraction, a novel approach is proposed by a joint use of minimum entropy deconvolution (MED) and tunable Q-factor wavelet transform (TQWT) to identify bearing faults at their early stage. First, vibration signals are passed through MED to relieve the affection of transmission path by which fault-induced impacts are conveyed to sensors, resulting in a preliminary enhancement of impact signatures. Then, the preliminary enhanced signals are further processed by TQWT assigned with various Q values to make fault information more evident. Among the resultant sub-band signals from TQWT, the one with maximum kurtosis is chose for envelop spectrum analysis. The predominant peaks in envelop spectral are compared with bearing characteristic frequencies computed from the rotating speed and geometrics dimensions of bearings so as to determine their health conditions. Results on simulated signal of inner race fault verified the effectiveness of the proposed method, and the ones on bearing run-to-failure data demonstrated its advantages in the incipient fault diagnosis of bearings.
Aiming at the weak impact features in the incipient stage of rolling bearing faults and the difficulty in fault-related information extraction, a novel approach is proposed by a joint use of minimum entropy deconvolution (MED) and tunable Q-factor wavelet transform (TQWT) to identify bearing faults at their early stage. First, vibration signals are passed through MED to relieve the affection of transmission path by which fault-induced impacts are conveyed to sensors, resulting in a preliminary enhancement of impact signatures. Then, the preliminary enhanced signals are further processed by TQWT assigned with various Q values to make fault information more evident. Among the resultant sub-band signals from TQWT, the one with maximum kurtosis is chose for envelop spectrum analysis. The predominant peaks in envelop spectral are compared with bearing characteristic frequencies computed from the rotating speed and geometrics dimensions of bearings so as to determine their health conditions. Results on simulated signal of inner race fault verified the effectiveness of the proposed method, and the ones on bearing run-to-failure data demonstrated its advantages in the incipient fault diagnosis of bearings.











2021, 40(6): 870-879.
doi: 10.13433/j.cnki.1003-8728.20200162
Abstract:
Taking into consideration the single-tooth meshing pair contact line expression when the helical gear pair transverse contact ratio is greater than the overlap ratio and when the base circle of the helical gear is larger than the root circle, a helical gear variable cross-section cantilever beam model is established. The slicing method and the adaptive recursive compound Lobatto numerical integration method are used to solve the time-varying mesh stiffness (TVMS) of the helical gear. The feasibility of the model is verified by comparing it with the FEM and the empirical method. Based on the model, the effects of spalling fault and different spalling shapes on the TVMS of different spalling lengths, widths, radial positions are analyzed. The results show that different spalling lengths have obvious influences on the meshing position of the helical gear pair in the spalling area. The TVMS decreases linearly with the increase of the spalling width; the influence of spalls at different radial positions is greater than that on the TVMS at the positions closer to the root. With different spalling shapes, triangular and circular spalls cause the non-linear reduction of TVMS; quadrilateral spalls cause their uniform reduction.
Taking into consideration the single-tooth meshing pair contact line expression when the helical gear pair transverse contact ratio is greater than the overlap ratio and when the base circle of the helical gear is larger than the root circle, a helical gear variable cross-section cantilever beam model is established. The slicing method and the adaptive recursive compound Lobatto numerical integration method are used to solve the time-varying mesh stiffness (TVMS) of the helical gear. The feasibility of the model is verified by comparing it with the FEM and the empirical method. Based on the model, the effects of spalling fault and different spalling shapes on the TVMS of different spalling lengths, widths, radial positions are analyzed. The results show that different spalling lengths have obvious influences on the meshing position of the helical gear pair in the spalling area. The TVMS decreases linearly with the increase of the spalling width; the influence of spalls at different radial positions is greater than that on the TVMS at the positions closer to the root. With different spalling shapes, triangular and circular spalls cause the non-linear reduction of TVMS; quadrilateral spalls cause their uniform reduction.






















2021, 40(6): 880-886.
doi: 10.13433/j.cnki.1003-8728.20200136
Abstract:
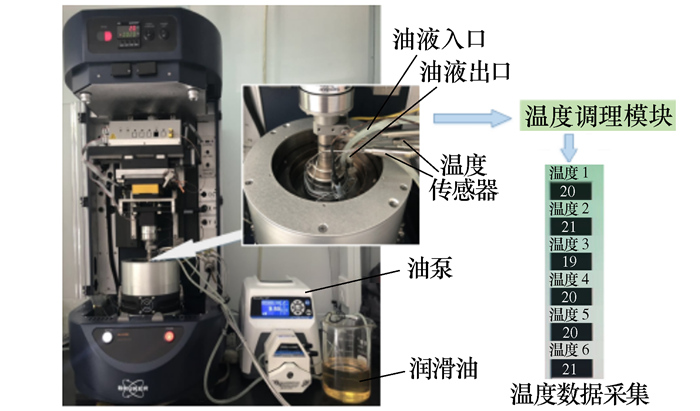
The wet friction pair is the core component of the mechanical transmission system. Thermal damage is the main failure mode. The measurement of the instantaneous temperature of the friction pair contact surface is the key to research this kind of problem. The real-time temperature measurement system of wet friction pair test based on UMT(Universal Mechanical Tester) friction and wear comprehensive testing machine is designed by arranging temperature sensors at different depths in the radial direction of the friction plates, and a temperature test method and a detailed experimental plan are proposed, which is aimed at the current situation that the real-time temperature of rotating contact surface is difficult to measure. Experimental data shows that the test system can realize the real-time measurement and acquisition of the temperature at different positions of the friction interface in the friction-sliding process, which provides a reliable test method and data for the wet friction pair thermal analysis.
The wet friction pair is the core component of the mechanical transmission system. Thermal damage is the main failure mode. The measurement of the instantaneous temperature of the friction pair contact surface is the key to research this kind of problem. The real-time temperature measurement system of wet friction pair test based on UMT(Universal Mechanical Tester) friction and wear comprehensive testing machine is designed by arranging temperature sensors at different depths in the radial direction of the friction plates, and a temperature test method and a detailed experimental plan are proposed, which is aimed at the current situation that the real-time temperature of rotating contact surface is difficult to measure. Experimental data shows that the test system can realize the real-time measurement and acquisition of the temperature at different positions of the friction interface in the friction-sliding process, which provides a reliable test method and data for the wet friction pair thermal analysis.













2021, 40(6): 887-892.
doi: 10.13433/j.cnki.1003-8728.20200135
Abstract:
This paper takes the robot arm collision detection as the research object. A collision detection method based on current change speed is proposed, which makes up for the shortcomings of imperfect dynamic model and complex parametric identifying. The test found that there is a sudden current change when the manipulator is in collision. Judge it as a collision when the current change rate is greater than a given threshold. The test found that the threshold of the current change rate at different speeds of the motor is also different. Therefore, a threshold detection method for motor speed is proposed to calculate the threshold of the motor at different speeds with the motor speed fitting relationship. Therefore, it is judged whether the motor has a collision at different rotation speeds. The final collision detection experiment results show that when the collision occurs, the robot arm can quickly detect the collision and make corresponding response, achieving the expected goal.
This paper takes the robot arm collision detection as the research object. A collision detection method based on current change speed is proposed, which makes up for the shortcomings of imperfect dynamic model and complex parametric identifying. The test found that there is a sudden current change when the manipulator is in collision. Judge it as a collision when the current change rate is greater than a given threshold. The test found that the threshold of the current change rate at different speeds of the motor is also different. Therefore, a threshold detection method for motor speed is proposed to calculate the threshold of the motor at different speeds with the motor speed fitting relationship. Therefore, it is judged whether the motor has a collision at different rotation speeds. The final collision detection experiment results show that when the collision occurs, the robot arm can quickly detect the collision and make corresponding response, achieving the expected goal.














2021, 40(6): 893-899.
doi: 10.13433/j.cnki.1003-8728.20200131
Abstract:
In this paper, an integrated algorithm combining wavelet threshold denoising method with morphological denoising method was designed to suppress the signal error and denoise the complex pollution sources including impulse noise and Gaussian noise in the vibration signal of mechanical equipment. Firstly, the improved wavelet threshold function was introduced based Gaussian smoothing method, which could adjust the convergence trend of the threshold function to the true value of the wavelet transforms coefficient to effectively remove the Gaussian noise and avoid the steady-state deviation, the threshold function proposed had a better effect on the measurement of SNR and RMSE compared with several commonly used algorithms. Secondly, the best algorithm was selected from several morphological operators for pulse noise removal. Finally, the integrated algorithm was applied to the denoising experiment of the vibration signal of the manipulator. The results showed that the algorithm could effectively remove the noise and retain the signal characteristics.
In this paper, an integrated algorithm combining wavelet threshold denoising method with morphological denoising method was designed to suppress the signal error and denoise the complex pollution sources including impulse noise and Gaussian noise in the vibration signal of mechanical equipment. Firstly, the improved wavelet threshold function was introduced based Gaussian smoothing method, which could adjust the convergence trend of the threshold function to the true value of the wavelet transforms coefficient to effectively remove the Gaussian noise and avoid the steady-state deviation, the threshold function proposed had a better effect on the measurement of SNR and RMSE compared with several commonly used algorithms. Secondly, the best algorithm was selected from several morphological operators for pulse noise removal. Finally, the integrated algorithm was applied to the denoising experiment of the vibration signal of the manipulator. The results showed that the algorithm could effectively remove the noise and retain the signal characteristics.









2021, 40(6): 900-907.
doi: 10.13433/j.cnki.1003-8728.20200134
Abstract:
Due to its complexity, there are few literatures about multi-objective two-sided assembly line problem of type-2. To solve this problem, based on the two-dimensional mathematical model, an improved combination of the harmony search algorithm and the non-dominated sorting genetic algorithm was proposed, which performed a global search through the improvisation process and a local search through variable neighborhood search structure (insertion and recombination). For E-type work, the earliest start time of the left and right work stations could be used for dynamic comparison to select the earliest work station, and the waiting time was minimized. The non-dominated sorting and congestion degree calculation of NSGA-2 was used to solve the multi-objective optimization problem. Finally, an example was selected to solve, and the optimal production cycle and smoothness coefficient and the distribution of the tasks at each station are obtained, which verifies the effectiveness of the hybrid algorithm.
Due to its complexity, there are few literatures about multi-objective two-sided assembly line problem of type-2. To solve this problem, based on the two-dimensional mathematical model, an improved combination of the harmony search algorithm and the non-dominated sorting genetic algorithm was proposed, which performed a global search through the improvisation process and a local search through variable neighborhood search structure (insertion and recombination). For E-type work, the earliest start time of the left and right work stations could be used for dynamic comparison to select the earliest work station, and the waiting time was minimized. The non-dominated sorting and congestion degree calculation of NSGA-2 was used to solve the multi-objective optimization problem. Finally, an example was selected to solve, and the optimal production cycle and smoothness coefficient and the distribution of the tasks at each station are obtained, which verifies the effectiveness of the hybrid algorithm.










2021, 40(6): 908-911.
doi: 10.13433/j.cnki.1003-8728.20200139
Abstract:
In order to realize ultra-precision cutting of ZnGeP2 crystals, improve the surface processing quality and obtain a nano-scale smooth surface, the critical depth by brittle-ductile transformation on the surface of ZnGeP2 crystals was calculated according to the nanoindentation experiments. Within this depth, the cutting material occurs a brittle-ductile transformation and is removed in a ductile manner. On this basis, the ultra-precision cutting of ZnGeP2 crystals was carried out with a single-point diamond fly cutting machine DFC600A. By controlling the cutting depth to be lower than the critical depth of the brittle-ductile transformation of the ZnGeP2 crystals, make the surface of the material only plastically deformed, the nano-scale smooth surface processing of the crystal surface was achieved, and the surface roughness reached 1.01 nm, met the requirements for the surface of the ZnGeP2 crystal, which verified the effectiveness of the method.
In order to realize ultra-precision cutting of ZnGeP2 crystals, improve the surface processing quality and obtain a nano-scale smooth surface, the critical depth by brittle-ductile transformation on the surface of ZnGeP2 crystals was calculated according to the nanoindentation experiments. Within this depth, the cutting material occurs a brittle-ductile transformation and is removed in a ductile manner. On this basis, the ultra-precision cutting of ZnGeP2 crystals was carried out with a single-point diamond fly cutting machine DFC600A. By controlling the cutting depth to be lower than the critical depth of the brittle-ductile transformation of the ZnGeP2 crystals, make the surface of the material only plastically deformed, the nano-scale smooth surface processing of the crystal surface was achieved, and the surface roughness reached 1.01 nm, met the requirements for the surface of the ZnGeP2 crystal, which verified the effectiveness of the method.




2021, 40(6): 912-920.
doi: 10.13433/j.cnki.1003-8728.20200141
Abstract:
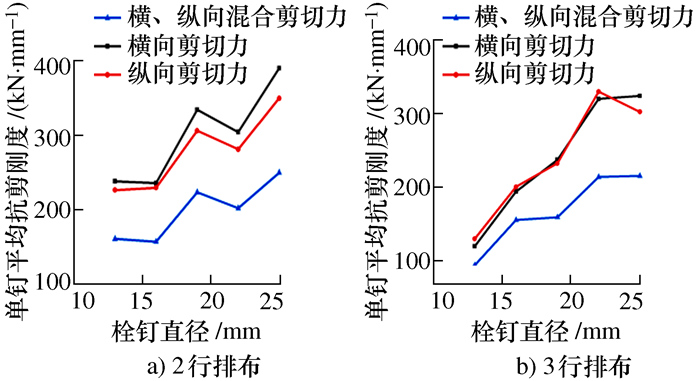
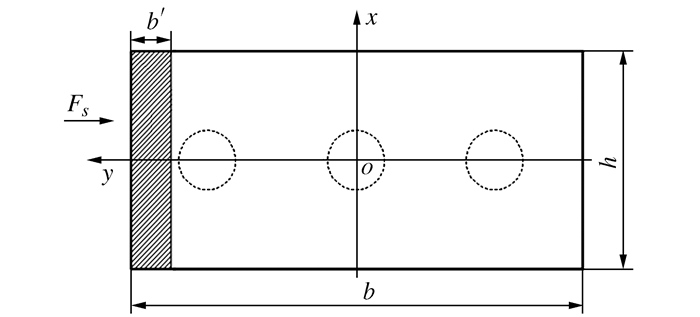
The "sandwich" composite structural bed with external steel plate and internal concrete filling has the characteristics of dynamic and thermodynamic stability. However, the ″peeling″ phenomenon often occurs between the inner and outer layers of the composite structural bed because of the shear force caused by its cutting load. Therefore, connectors are required to resist the shear deformation. For the shear analysis and optimal design of a connector, the physical model of single nail and single shear is built first of all. With the model, the structure of the connector is simplified into that of a cantilever beam through equivalent replacement, and the stress distribution of the connector and the shear strength of the structure are analyzed. Furthermore, the shear properties of different connectors are compared and the type of connector is determined. Then the finite element analysis of the diameter and arrangement of the connectors was done to determine the group nail effects on their mechanical properties. The connector's shear force transfer theory was used to verify the law of shear stiffness. The results show that the single stud has a better shear performance than the single bolt when their parameters are the same and that the shear performance of multi-pins with different diameters is affected by their arrangements and directions of force. In addition, the finite element analysis results agree well with the existing calculation formula of shear performance.
The "sandwich" composite structural bed with external steel plate and internal concrete filling has the characteristics of dynamic and thermodynamic stability. However, the ″peeling″ phenomenon often occurs between the inner and outer layers of the composite structural bed because of the shear force caused by its cutting load. Therefore, connectors are required to resist the shear deformation. For the shear analysis and optimal design of a connector, the physical model of single nail and single shear is built first of all. With the model, the structure of the connector is simplified into that of a cantilever beam through equivalent replacement, and the stress distribution of the connector and the shear strength of the structure are analyzed. Furthermore, the shear properties of different connectors are compared and the type of connector is determined. Then the finite element analysis of the diameter and arrangement of the connectors was done to determine the group nail effects on their mechanical properties. The connector's shear force transfer theory was used to verify the law of shear stiffness. The results show that the single stud has a better shear performance than the single bolt when their parameters are the same and that the shear performance of multi-pins with different diameters is affected by their arrangements and directions of force. In addition, the finite element analysis results agree well with the existing calculation formula of shear performance.


















2021, 40(6): 921-927.
doi: 10.13433/j.cnki.1003-8728.20200164
Abstract:
In view of the overheating problems caused by insufficient coolant of flood cooling in the milling process of nickel-based superalloy, the directional internal-cooling method was used to improve the milling heat transfer. The computational fluid dynamics method is used to analyze the flow field characteristics of directional internal cooling. The results show that cutting fluid can be injected into the cutting area accurately and centrally by directional internal-cooling method, and the heat transfer efficiency is improved. The end-milling experiments under flood cooling and directional internal-cooling were carried out. The experimental results indicate that under the same milling parameters, the directional internal cooling has better heat transfer performance, and the cooling efficiency increases with the increasing of coolant pressure. At a supply pressure of 10 bar, the milling temperature, the surface roughness and the degree of work-hardening decreased by 32.2%, 19.8% and 11.9%, respectively, and the residual compressive stress in the surface increased by 105.52 MPa, and a more regular machined surface was obtained.
In view of the overheating problems caused by insufficient coolant of flood cooling in the milling process of nickel-based superalloy, the directional internal-cooling method was used to improve the milling heat transfer. The computational fluid dynamics method is used to analyze the flow field characteristics of directional internal cooling. The results show that cutting fluid can be injected into the cutting area accurately and centrally by directional internal-cooling method, and the heat transfer efficiency is improved. The end-milling experiments under flood cooling and directional internal-cooling were carried out. The experimental results indicate that under the same milling parameters, the directional internal cooling has better heat transfer performance, and the cooling efficiency increases with the increasing of coolant pressure. At a supply pressure of 10 bar, the milling temperature, the surface roughness and the degree of work-hardening decreased by 32.2%, 19.8% and 11.9%, respectively, and the residual compressive stress in the surface increased by 105.52 MPa, and a more regular machined surface was obtained.














2021, 40(6): 928-933.
doi: 10.13433/j.cnki.1003-8728.20200124
Abstract:
In order to effectively solve the circular seam identification for non-standard tanks, a circular seam location and tracking system based on passive binocular vision was designed. Firstly, the quality of the images collected by the left and right cameras is improved, and the Region of Interest (ROI) is dynamically extracted based on the Hough transform. Then image processing is used to denoise, and the method based on binary matrix removal of pre-welds is used to remove the interference of pre-welds on weld recognition. The least-square method is used to complete the weld information and fit the weld straight line. Then, with the improved binocular vision model and the stereo matching method based on the epipolar line, the circular seam is subdivided into straight welds within multiple seam sections, and the space coordinates of the weld points on the circular seam are obtained. The experimental results show that the average error of the system is 0.14 mm, and the weld position can be identified accurately, which verifies that the system has a good accuracy.
In order to effectively solve the circular seam identification for non-standard tanks, a circular seam location and tracking system based on passive binocular vision was designed. Firstly, the quality of the images collected by the left and right cameras is improved, and the Region of Interest (ROI) is dynamically extracted based on the Hough transform. Then image processing is used to denoise, and the method based on binary matrix removal of pre-welds is used to remove the interference of pre-welds on weld recognition. The least-square method is used to complete the weld information and fit the weld straight line. Then, with the improved binocular vision model and the stereo matching method based on the epipolar line, the circular seam is subdivided into straight welds within multiple seam sections, and the space coordinates of the weld points on the circular seam are obtained. The experimental results show that the average error of the system is 0.14 mm, and the weld position can be identified accurately, which verifies that the system has a good accuracy.
















2021, 40(6): 934-940.
doi: 10.13433/j.cnki.1003-8728.20200140
Abstract:
Considering that there are many forward tilt or rollover accidents of bridge erecting machines, the dynamic response characteristics of the structure under wind load is studied in this paper. Firstly, a wind field model with exponential wind speed profile and Kaimal spectrum of stochastic fluctuating wind is constructed, and the pressure-time curve of natural wind is obtained by fast Fourier transform (FFT) method. Secondly, according to the four representative dangerous working conditions under wind load of the JQ900A bridge erecting machine, a finite element model of the bridge erecting machine is established, and the dangerous parts of the whole machine under dangerous working conditions are further determined through static analysis. Eventually the transient dynamic analysis of the bridge erecting machine is carried out with the wind load as the input condition, the displacement and stress characteristics of dangerous parts are studied. Studies prove that the axis wind load produces major effects, because the stability and self-damping are stronger in other directions, so it is more prone to forward tilt accidents. The dynamic response of the main beam and the front leg is especially obvious when the beam is half-loaded and falling, which will be the focus of real-time monitoring and structural improvement.
Considering that there are many forward tilt or rollover accidents of bridge erecting machines, the dynamic response characteristics of the structure under wind load is studied in this paper. Firstly, a wind field model with exponential wind speed profile and Kaimal spectrum of stochastic fluctuating wind is constructed, and the pressure-time curve of natural wind is obtained by fast Fourier transform (FFT) method. Secondly, according to the four representative dangerous working conditions under wind load of the JQ900A bridge erecting machine, a finite element model of the bridge erecting machine is established, and the dangerous parts of the whole machine under dangerous working conditions are further determined through static analysis. Eventually the transient dynamic analysis of the bridge erecting machine is carried out with the wind load as the input condition, the displacement and stress characteristics of dangerous parts are studied. Studies prove that the axis wind load produces major effects, because the stability and self-damping are stronger in other directions, so it is more prone to forward tilt accidents. The dynamic response of the main beam and the front leg is especially obvious when the beam is half-loaded and falling, which will be the focus of real-time monitoring and structural improvement.












2021, 40(6): 941-948.
doi: 10.13433/j.cnki.1003-8728.20200137
Abstract:
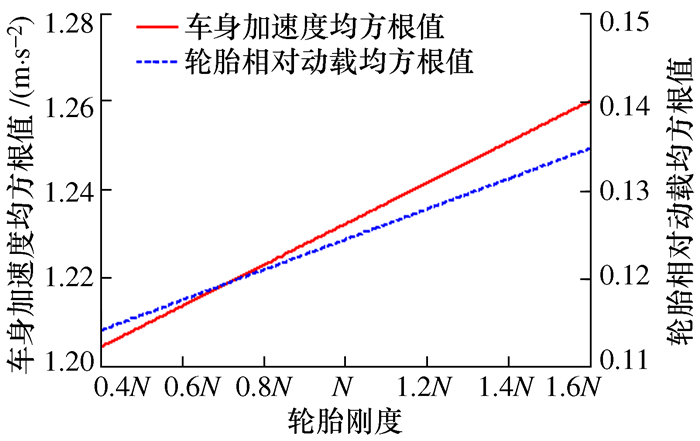
In order to predict suspension energy regenerative potential and realize the recovery of vibration energy, the mathematical model of 1/4 energy regenerative suspension is established for the electromagnetic linear motor suspension structure and verified with the bench test. The root mean square value of the energy regenerative power is used as the index, the influence factors of energy regenerative potential, including driving conditions and suspension parameters, are analyzed; the influence of various factors on suspension energy regenerative potential is obtained. On this basis, energy recovery circuit and voltage rise and fall control rules were designed; the MATLAB/Simulink was used to simulate the suspension energy recovery performance. The comparisons were made with the no voltage rise and fall control rules. The simulation results show that the voltage rise and fall control rules increase the energy recovery efficiency by 24.1% and that the designed energy recovery circuit and voltage rise and fall control rules can effectively improve the vibration energy recovery of the electromagnetic linear motor suspension.
In order to predict suspension energy regenerative potential and realize the recovery of vibration energy, the mathematical model of 1/4 energy regenerative suspension is established for the electromagnetic linear motor suspension structure and verified with the bench test. The root mean square value of the energy regenerative power is used as the index, the influence factors of energy regenerative potential, including driving conditions and suspension parameters, are analyzed; the influence of various factors on suspension energy regenerative potential is obtained. On this basis, energy recovery circuit and voltage rise and fall control rules were designed; the MATLAB/Simulink was used to simulate the suspension energy recovery performance. The comparisons were made with the no voltage rise and fall control rules. The simulation results show that the voltage rise and fall control rules increase the energy recovery efficiency by 24.1% and that the designed energy recovery circuit and voltage rise and fall control rules can effectively improve the vibration energy recovery of the electromagnetic linear motor suspension.















2021, 40(6): 949-954.
doi: 10.13433/j.cnki.1003-8728.20200163
Abstract:
Asymmetric grinding for rail with sharp-radius curve can reduce rail head side grinding, increase wheelset guiding ability; optimizing the target surface of asymmetric grinding can improve grinding quality and further improve wheel-rail contact stress concentration and wheel-set guiding ability of rail vehicles when passing through sharp-radius curve. Based on NURBS curve, a parametric model of rail head curve in asymmetric grinding area was constructed based on adjustable weight factor, and a multi-objective global optimization model of asymmetric grinding target profile was established based on Kriging surrogate model of wheel-rail contact performance and wheel-pair curve passing ability. With the NSGA-Ⅱ algorithm based on multi-objective global optimization of adjustable power factor, the optimization target profile of the rail asymmetrical grinding is obtained. The optimization results show that the wheel-rail contact stress concentration and the wheel-set curve passing ability of the vehicle are obviously improved.
Asymmetric grinding for rail with sharp-radius curve can reduce rail head side grinding, increase wheelset guiding ability; optimizing the target surface of asymmetric grinding can improve grinding quality and further improve wheel-rail contact stress concentration and wheel-set guiding ability of rail vehicles when passing through sharp-radius curve. Based on NURBS curve, a parametric model of rail head curve in asymmetric grinding area was constructed based on adjustable weight factor, and a multi-objective global optimization model of asymmetric grinding target profile was established based on Kriging surrogate model of wheel-rail contact performance and wheel-pair curve passing ability. With the NSGA-Ⅱ algorithm based on multi-objective global optimization of adjustable power factor, the optimization target profile of the rail asymmetrical grinding is obtained. The optimization results show that the wheel-rail contact stress concentration and the wheel-set curve passing ability of the vehicle are obviously improved.








2021, 40(6): 955-962.
doi: 10.13433/j.cnki.1003-8728.20200165
Abstract:
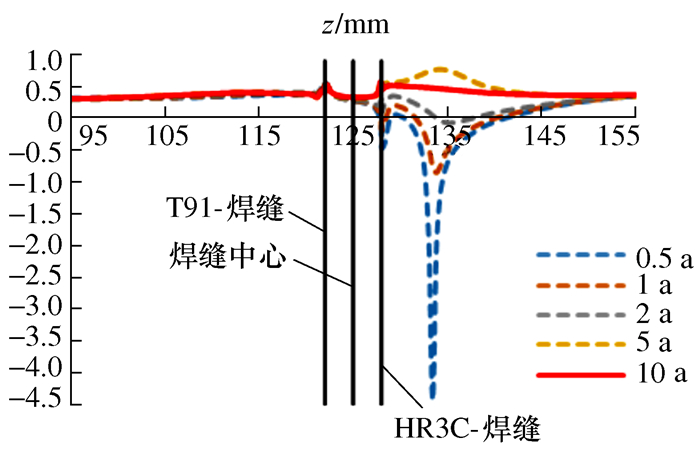
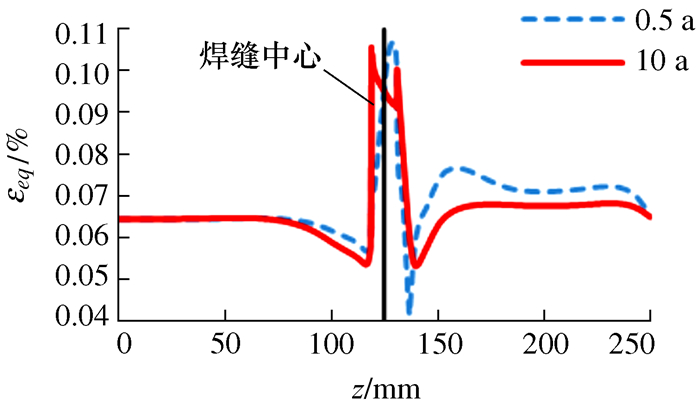
The service process of T91-HR3C dissimilar steel joint in the high temperature steam pipe is studied by using numerical simulation. The creep constitutive models for the base metal and the welded area are defined in ANSYS software. The variation law of temperature, stress and strain of the base metal, heat affected area, weld fusion line and weld in the service process are analyzed separately. The dangerous points of weld joint in the service process are determined. The joint deformation in the service process is also described. The results show that the stress concentration of T91-HR3C dissimilar steel joint occurs in the weld fusion area in the long-term service under high temperature, and then shifts gradually from the HR3C weld interface to the T91 weld interface over time, and finally the stress relaxation phenomenon occurs. It is considered that the performance degradation of the heat affected zone in the weld area is the key to affect its creep life.
The service process of T91-HR3C dissimilar steel joint in the high temperature steam pipe is studied by using numerical simulation. The creep constitutive models for the base metal and the welded area are defined in ANSYS software. The variation law of temperature, stress and strain of the base metal, heat affected area, weld fusion line and weld in the service process are analyzed separately. The dangerous points of weld joint in the service process are determined. The joint deformation in the service process is also described. The results show that the stress concentration of T91-HR3C dissimilar steel joint occurs in the weld fusion area in the long-term service under high temperature, and then shifts gradually from the HR3C weld interface to the T91 weld interface over time, and finally the stress relaxation phenomenon occurs. It is considered that the performance degradation of the heat affected zone in the weld area is the key to affect its creep life.

















2021, 40(6): 963-968.
doi: 10.13433/j.cnki.1003-8728.20200175
Abstract:
The cable net structure is an important part of the deployable antenna, under the support of the truss, its front/rear cable net and vertical cable array are in a tension state, forming a working reflective surface that meets the required precision. In this paper, a design method of cable net considering the deformation of truss is presented. First, based on the singular value decomposition of equilibrium matrix of cable net structure, the tension of cable segment is constrained and the uniformity of cable force is taken as the objective, and a set of optimal tension is found by optimizing solution. Then, the cable net is connected to the truss, the multi-objective optimization model of cable net structure is established by taking the tension and the node position increment as design variables, and taking the root mean square of the tension change of the cable segment directly connected to the truss, the uniformity of the tension and the accuracy of the reflector surface as the objectives, and also constraining the range of the cable segment tension and the node position increment. The method presented is programmed for a corresponding example at last, and the results indicate that the method is feasible.
The cable net structure is an important part of the deployable antenna, under the support of the truss, its front/rear cable net and vertical cable array are in a tension state, forming a working reflective surface that meets the required precision. In this paper, a design method of cable net considering the deformation of truss is presented. First, based on the singular value decomposition of equilibrium matrix of cable net structure, the tension of cable segment is constrained and the uniformity of cable force is taken as the objective, and a set of optimal tension is found by optimizing solution. Then, the cable net is connected to the truss, the multi-objective optimization model of cable net structure is established by taking the tension and the node position increment as design variables, and taking the root mean square of the tension change of the cable segment directly connected to the truss, the uniformity of the tension and the accuracy of the reflector surface as the objectives, and also constraining the range of the cable segment tension and the node position increment. The method presented is programmed for a corresponding example at last, and the results indicate that the method is feasible.








2021, 40(6): 969-978.
doi: 10.13433/j.cnki.1003-8728.20200146
Abstract:
Accurate and stable motion planning of mobile machine unit is the basis and prerequisite for its autonomous completion of the established tasks. It is a technical problem to be solved in the application research of multi-robot manufacturing system. By reviewing the existing research of the multi-robot manufacturing systems, the current research state and trends of motion planning algorithms are mainly introduced in this paper. The advantages and disadvantages of various algorithms are analyzed to provide the theoretical basis for the industrial application of multi-robot manufacturing systems. The problems needed to be solved to realize the industrial application of multi-robot manufacturing system are discussed. The research emphases the future development directions of multi-robot system and its motion planning methods are prospected.
Accurate and stable motion planning of mobile machine unit is the basis and prerequisite for its autonomous completion of the established tasks. It is a technical problem to be solved in the application research of multi-robot manufacturing system. By reviewing the existing research of the multi-robot manufacturing systems, the current research state and trends of motion planning algorithms are mainly introduced in this paper. The advantages and disadvantages of various algorithms are analyzed to provide the theoretical basis for the industrial application of multi-robot manufacturing systems. The problems needed to be solved to realize the industrial application of multi-robot manufacturing system are discussed. The research emphases the future development directions of multi-robot system and its motion planning methods are prospected.






2021, 40(6): 979-984.
doi: 10.13433/j.cnki.1003-8728.20200123
Abstract:
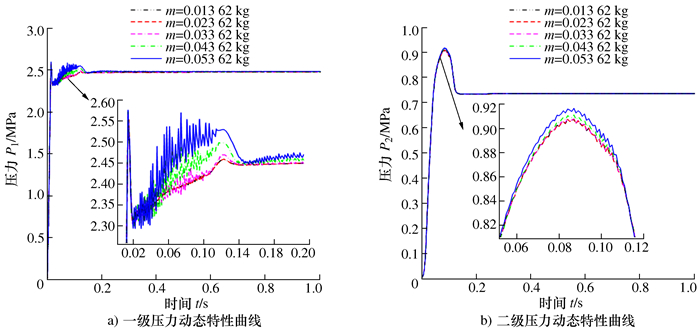
In order to study the influence of the structural parameters of a pneumatic two-stage gas pressure reducer on its pressure characteristics, the AMESim model of the two-stage pressure reducer is established. The dynamic characteristics curves of the output pressure with different structural parameters of the two-stage gas pressure reducer were obtained through simulation experiments, and statistical analysis was carried out. The results show that the sensitivity of structural parameters to the characteristics of the first-stage output pressure is orderly the leakage area of the first-stage valve rod seal, the leakage area of the second-stage valve rod seal, the mass of the first-stage moving parts and the stiffness of the diaphragm. With leakage area of the first-stage valve rod seal increases, the pressure overshoot decreases, the degree of oscillation decreases, and the stability increases. The sensitivity of the structural parameters to characteristics of the secondary output pressure is in the order of diaphragm stiffness, the leakage area of the secondary valve seal, the mass of the first-stage moving parts and the leakage area of the first-stage valve rod seal, in which the diaphragm stiffness increases, the pressure overshoot decreases and the stability increases.
In order to study the influence of the structural parameters of a pneumatic two-stage gas pressure reducer on its pressure characteristics, the AMESim model of the two-stage pressure reducer is established. The dynamic characteristics curves of the output pressure with different structural parameters of the two-stage gas pressure reducer were obtained through simulation experiments, and statistical analysis was carried out. The results show that the sensitivity of structural parameters to the characteristics of the first-stage output pressure is orderly the leakage area of the first-stage valve rod seal, the leakage area of the second-stage valve rod seal, the mass of the first-stage moving parts and the stiffness of the diaphragm. With leakage area of the first-stage valve rod seal increases, the pressure overshoot decreases, the degree of oscillation decreases, and the stability increases. The sensitivity of the structural parameters to characteristics of the secondary output pressure is in the order of diaphragm stiffness, the leakage area of the secondary valve seal, the mass of the first-stage moving parts and the leakage area of the first-stage valve rod seal, in which the diaphragm stiffness increases, the pressure overshoot decreases and the stability increases.