


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2020 Vol. 39, No. 4
Display Method:
2020, 39(4): 493-500.
doi: 10.13433/j.cnki.1003-8728.20190183
 PDF 4580KB
PDF 4580KB
Abstract:
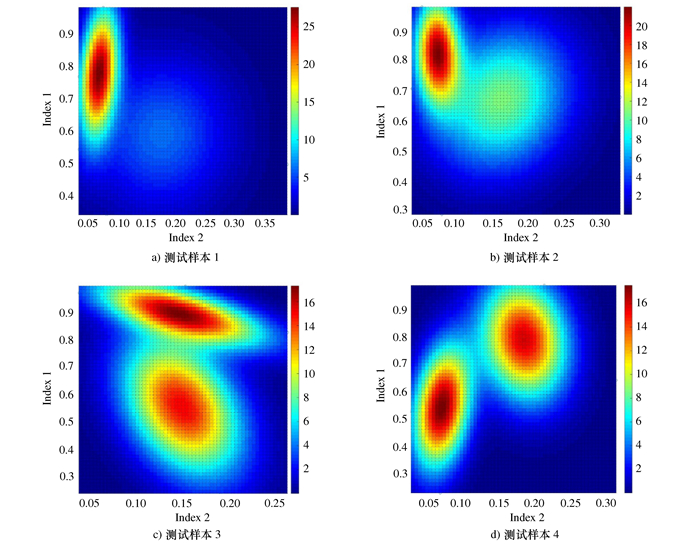
Bolted-joints are widely used in many fields. The discovery of the position of bolt looseness in time is one of the most important topics of structural health monitoring. The Gaussian mixture model is established by using the feature parameter sets, which are extracted from the Lamb wave signal collected by the piezoelectric array attached to an aluminum plate. The complete reference database is established by collecting the data of various looseness working conditions in the bolted-joint structure of the monitoring area. The real-time data is updated to establish the dynamic Gaussian mixture model, and the looseness of each bolt in the monitoring area is judged based on the maximum similarity criterion between the probability density distributions of the Gaussian mixture model. The experimental results show that the probability distribution similarity of the Gaussian mixture model between the test sample and the training sample in a consistent bolt tightness state is above 0.99, which is obviously higher than the probability distribution similarity in the inconsistent working condition. This method can effectively judge the state of each bolt in the monitoring area.
Bolted-joints are widely used in many fields. The discovery of the position of bolt looseness in time is one of the most important topics of structural health monitoring. The Gaussian mixture model is established by using the feature parameter sets, which are extracted from the Lamb wave signal collected by the piezoelectric array attached to an aluminum plate. The complete reference database is established by collecting the data of various looseness working conditions in the bolted-joint structure of the monitoring area. The real-time data is updated to establish the dynamic Gaussian mixture model, and the looseness of each bolt in the monitoring area is judged based on the maximum similarity criterion between the probability density distributions of the Gaussian mixture model. The experimental results show that the probability distribution similarity of the Gaussian mixture model between the test sample and the training sample in a consistent bolt tightness state is above 0.99, which is obviously higher than the probability distribution similarity in the inconsistent working condition. This method can effectively judge the state of each bolt in the monitoring area.










2020, 39(4): 501-507.
doi: 10.13433/j.cnki.1003-8728.20190180
Abstract:
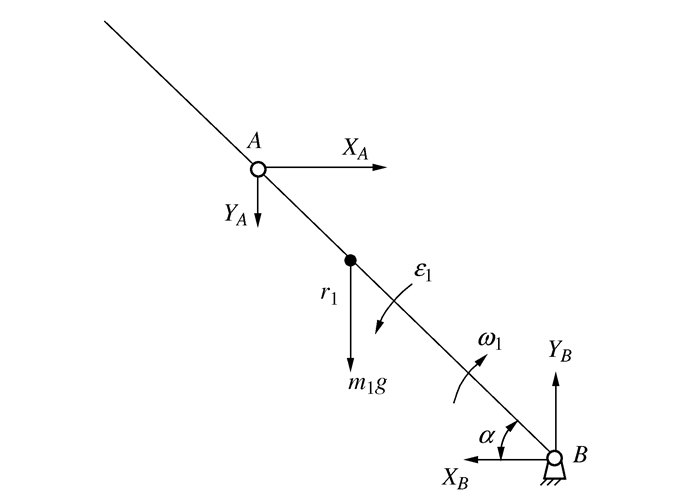
In order to study the dynamic characteristics of the new multi-group hydraulic cylinder luffing mechanism of the pile frame, the dynamic models of the five-bar mechanism was established by Euler equations, and the mathematical model was simulated by MATLAB software. Then the load changes of the supporting hydraulic cylinder, the rear hydraulic cylinder and the key hinge point under two different amplitude modes are analyzed. Finally, a new variable amplitude mechanism test platform is set up for test verification, and the dynamic simulation results are compared with the test results. The results show that the kinetic model can reflect the dynamic characteristics of the new multi-group hydraulic cylinder luffing mechanism. In the luffing process, the variable amplitude mode of the hydraulic cylinder retracting after the hydraulic cylinder is firstly contracted is better than that of the other variable amplitude mode, and the load fluctuation of the key hinge point is smaller, which is more conducive to improving the stability of the whole machine.
In order to study the dynamic characteristics of the new multi-group hydraulic cylinder luffing mechanism of the pile frame, the dynamic models of the five-bar mechanism was established by Euler equations, and the mathematical model was simulated by MATLAB software. Then the load changes of the supporting hydraulic cylinder, the rear hydraulic cylinder and the key hinge point under two different amplitude modes are analyzed. Finally, a new variable amplitude mechanism test platform is set up for test verification, and the dynamic simulation results are compared with the test results. The results show that the kinetic model can reflect the dynamic characteristics of the new multi-group hydraulic cylinder luffing mechanism. In the luffing process, the variable amplitude mode of the hydraulic cylinder retracting after the hydraulic cylinder is firstly contracted is better than that of the other variable amplitude mode, and the load fluctuation of the key hinge point is smaller, which is more conducive to improving the stability of the whole machine.










2020, 39(4): 508-515.
doi: 10.13433/j.cnki.1003-8728.20190186
Abstract:
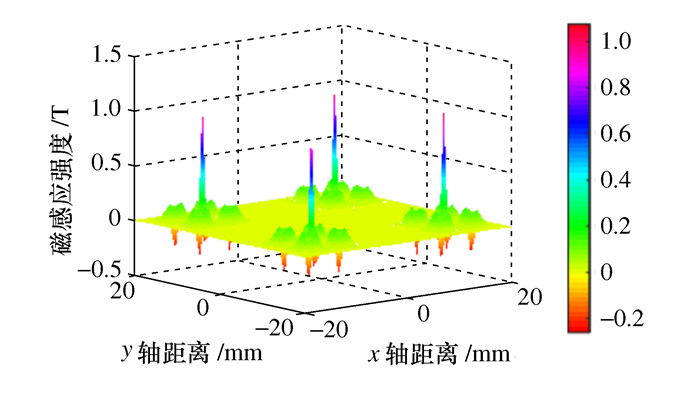
In order to eliminate the negative impact of space limitation caused by the installation of feedback sensors in analog actuators due to compact design requirements and the complex magnetic coupling calculation problem in a multi-magnet environment, a new four-stable state digital electromagnetic actuator array is designed by using the electromagnetic drive principle and the spatial distribution of magnetic induction intensity of the actuator array and then analyzed. Based on the Furlani space magnetic induction equation, the modeling of the actuator array is carried out, and a new fast magnetostatic coupling calculation method (single overlap addition) between multiple magnets is proposed. Compared with the check model (i.e., the Radia model) of the actuator array, the single overlap adding model (i.e., the MATLAB model) has a maximum magnetostatic force error of only 2.94%. Compared with the traditional calculation method, the accuracy and efficiency of the single overlap adding calculation method improves by about 65.82%. The actuator array's spatial flux density distribution is uniform, consistent, and independent.
In order to eliminate the negative impact of space limitation caused by the installation of feedback sensors in analog actuators due to compact design requirements and the complex magnetic coupling calculation problem in a multi-magnet environment, a new four-stable state digital electromagnetic actuator array is designed by using the electromagnetic drive principle and the spatial distribution of magnetic induction intensity of the actuator array and then analyzed. Based on the Furlani space magnetic induction equation, the modeling of the actuator array is carried out, and a new fast magnetostatic coupling calculation method (single overlap addition) between multiple magnets is proposed. Compared with the check model (i.e., the Radia model) of the actuator array, the single overlap adding model (i.e., the MATLAB model) has a maximum magnetostatic force error of only 2.94%. Compared with the traditional calculation method, the accuracy and efficiency of the single overlap adding calculation method improves by about 65.82%. The actuator array's spatial flux density distribution is uniform, consistent, and independent.











2020, 39(4): 516-523.
doi: 10.13433/j.cnki.1003-8728.20190184
Abstract:
The isomorphism identification of a kinematic chain is a complex problem, which is of great significance to the type synthesis of mechanisms. In this paper, a new method for describing and identifying the isomorphism of a kinematic chain with multiple joints is presented. Firstly, because of the difficulty in analyzing and recognizing multiple joints in a kinematic chain, an improved joint adjacency matrix is proposed to describe the kinematic chain with multiple joints. Then, the basic features of the kinematic chain are represented by feature codes because they are necessary conditions for isomorphism. Further, the joint distance matrix is constructed with the improved joint adjacency matrix, and its summation array is obtained. By distinguishing whether the structural constants of the feature codes and the summation array are equal, the isomorphism of the kinematic chain is identified. Finally, the validity and reliability of the method is verified with numerical examples.
The isomorphism identification of a kinematic chain is a complex problem, which is of great significance to the type synthesis of mechanisms. In this paper, a new method for describing and identifying the isomorphism of a kinematic chain with multiple joints is presented. Firstly, because of the difficulty in analyzing and recognizing multiple joints in a kinematic chain, an improved joint adjacency matrix is proposed to describe the kinematic chain with multiple joints. Then, the basic features of the kinematic chain are represented by feature codes because they are necessary conditions for isomorphism. Further, the joint distance matrix is constructed with the improved joint adjacency matrix, and its summation array is obtained. By distinguishing whether the structural constants of the feature codes and the summation array are equal, the isomorphism of the kinematic chain is identified. Finally, the validity and reliability of the method is verified with numerical examples.






2020, 39(4): 524-530.
doi: 10.13433/j.cnki.1003-8728.20190179
Abstract:
Stick slip vibration has always been one of the key factors affecting the efficiency and cost of deep well and ultra deep well crude oil exploitation, the rotary punching generator can effectively assist the drilling tool to solve the stick slip vibration problem. In view of the imperfection of the operation stability of the domestic rotary impulse generator, this paper presents a structural design scheme of the horizontal torsion impactor. The transient dynamic model of hydraulic hammer of horizontal torsion impactor is established and the internal flow field of the structure is simulated. The internal flow field and pressure characteristics are analyzed and the structural characteristics are determined. The experimental and simulation results are compared and analyzed. The results show that the theoretical determination of structural characteristics can provide stable performance, which proves the reliability and accuracy of the theory.
Stick slip vibration has always been one of the key factors affecting the efficiency and cost of deep well and ultra deep well crude oil exploitation, the rotary punching generator can effectively assist the drilling tool to solve the stick slip vibration problem. In view of the imperfection of the operation stability of the domestic rotary impulse generator, this paper presents a structural design scheme of the horizontal torsion impactor. The transient dynamic model of hydraulic hammer of horizontal torsion impactor is established and the internal flow field of the structure is simulated. The internal flow field and pressure characteristics are analyzed and the structural characteristics are determined. The experimental and simulation results are compared and analyzed. The results show that the theoretical determination of structural characteristics can provide stable performance, which proves the reliability and accuracy of the theory.








2020, 39(4): 531-538.
doi: 10.13433/j.cnki.1003-8728.20190181
Abstract:
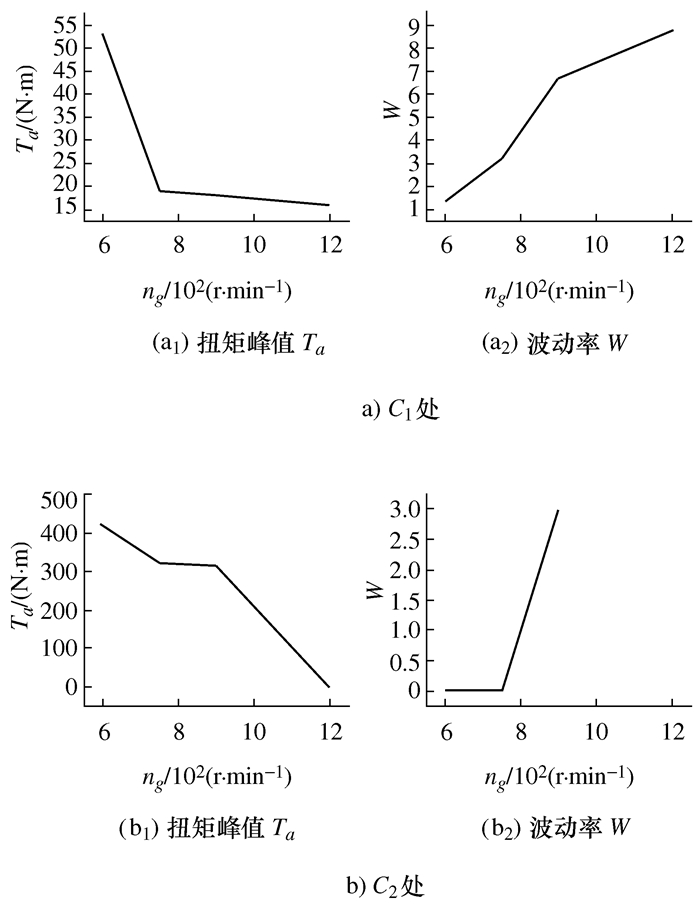
Aiming at the shortcomings of the existing hydraulic and rotary torsion tools, a swinging and twisting tool integrated in the screw motor is proposed to realize the cyclic torsional impact by the revolution of the motor rotor. The motion analysis and impact characteristics of the tool impact module are simulated, and the influences of contact stiffness, eccentricity, rotor speed, number of screw heads on rotor counter-torque and peak value of output-assisted rock breaking impact are obtained. The peak value of the impact torque and the peak value of the average impact torque are introduced to evaluate the magnitude of the reverse torque received by the rotor and the peak stability of the impact assembly output assisted rock breaking torque. The results show that the peak value of the impact torque and the peak value of the average impact torque are smaller at the contact point between the rotor and the pendulum. The counter-torque of the rotor is smaller, which helps to improve the life of the rotor. The peak of the impact torque is at the contact between the pendulum and the loose-leaf ring. The smaller the rate and the larger the average impact torque peak, the smoother the peak output torque of the impact assembly and effective rock breaking impact torque becomes larger.
Aiming at the shortcomings of the existing hydraulic and rotary torsion tools, a swinging and twisting tool integrated in the screw motor is proposed to realize the cyclic torsional impact by the revolution of the motor rotor. The motion analysis and impact characteristics of the tool impact module are simulated, and the influences of contact stiffness, eccentricity, rotor speed, number of screw heads on rotor counter-torque and peak value of output-assisted rock breaking impact are obtained. The peak value of the impact torque and the peak value of the average impact torque are introduced to evaluate the magnitude of the reverse torque received by the rotor and the peak stability of the impact assembly output assisted rock breaking torque. The results show that the peak value of the impact torque and the peak value of the average impact torque are smaller at the contact point between the rotor and the pendulum. The counter-torque of the rotor is smaller, which helps to improve the life of the rotor. The peak of the impact torque is at the contact between the pendulum and the loose-leaf ring. The smaller the rate and the larger the average impact torque peak, the smoother the peak output torque of the impact assembly and effective rock breaking impact torque becomes larger.









2020, 39(4): 539-546.
doi: 10.13433/j.cnki.1003-8728.20200003
Abstract:
The Archard wear model was used to calculate the journal wear in the mechanism with clearance, and the wear profile of joint was obtained. The dynamic changes caused by the irregular wear clearance caused by journal wear were studied by ADAMS dynamic simulation software. With the change of wear clearance, the response amplitude of acceleration between the center of journal and bearing shows a trend of increasing gradually, and the position of high vibration amplitude changes regularly with the increase of wear clearance, that is, the wear degree is closely related to the amplitude and time of system vibration. Finally, the above conclusions are verified by a self-made experimental device with clearance slider-crank.
The Archard wear model was used to calculate the journal wear in the mechanism with clearance, and the wear profile of joint was obtained. The dynamic changes caused by the irregular wear clearance caused by journal wear were studied by ADAMS dynamic simulation software. With the change of wear clearance, the response amplitude of acceleration between the center of journal and bearing shows a trend of increasing gradually, and the position of high vibration amplitude changes regularly with the increase of wear clearance, that is, the wear degree is closely related to the amplitude and time of system vibration. Finally, the above conclusions are verified by a self-made experimental device with clearance slider-crank.













2020, 39(4): 547-553.
doi: 10.13433/j.cnki.1003-8728.20190178
Abstract:
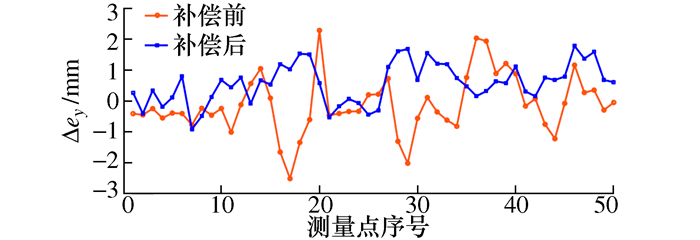
A two-step error compensation method is proposed for the problem that most industrial robot structures need to meet the Pieper criterion and cannot directly compensate all kinematic parameter errors. Firstly, based on the modified D-H method and differential kinematics, the robot positioning error model is established, and the expression between the absolute positioning error of the robot terminal and the kinematic parameter error is obtained. Secondly, the least squares iteration method is used to calculate the kinematic parameter errors, and some kinematic parameter errors which have no influence on the inverse kinematics solution of the robot are directly compensated to the robot D-H configuration parameters, and the remaining kinematic parameter errors are converted into the offset values of joint angles for indirect compensation. Finally, the experimental platform is built and the two-step error compensation experiment is carried out on the Kawasaki RS010NA six degrees of freedom industrial robot. The experimental result indicates that the average absolute positioning error of the robot terminal is decreased from 5.4194mm to 1.1605mm, which means the average absolute positioning accuracy is improved by about 80%. The proposed method can effectively improve the robot absolute positioning accuracy.
A two-step error compensation method is proposed for the problem that most industrial robot structures need to meet the Pieper criterion and cannot directly compensate all kinematic parameter errors. Firstly, based on the modified D-H method and differential kinematics, the robot positioning error model is established, and the expression between the absolute positioning error of the robot terminal and the kinematic parameter error is obtained. Secondly, the least squares iteration method is used to calculate the kinematic parameter errors, and some kinematic parameter errors which have no influence on the inverse kinematics solution of the robot are directly compensated to the robot D-H configuration parameters, and the remaining kinematic parameter errors are converted into the offset values of joint angles for indirect compensation. Finally, the experimental platform is built and the two-step error compensation experiment is carried out on the Kawasaki RS010NA six degrees of freedom industrial robot. The experimental result indicates that the average absolute positioning error of the robot terminal is decreased from 5.4194mm to 1.1605mm, which means the average absolute positioning accuracy is improved by about 80%. The proposed method can effectively improve the robot absolute positioning accuracy.









2020, 39(4): 554-560.
doi: 10.13433/j.cnki.1003-8728.20190157
Abstract:
Aiming at the problem of too many redundant points and more turning points of paths generated by the Rapidly-exploring Random Tree algorithm (RRT), this paper proposes a path smoothing algorithm based on Douglas-Peucker algorithm and B-spline function to solve it. Firstly, the Douglas-Peucker (DP) algorithm is used to extract several nodes from the path nodes which generated by the RRT algorithm as key road signs. Then, in order to achieve a smooth planning path, the B-spline function is used to fit the key road signs to obtain a smooth path with continuous curvature. By experimenting in different environments and comparing the tests obtained by other path smoothing algorithms, the results show that the algorithm can significantly cut down the path length and reduce the transition number of optimized path, and it also greatly improve the smoothness of the optimized path. It is beneficial to reduce the energy consumption of the robot in a single voyage and make it complete more tasks, which can improve the robot's working efficiency effectively.
Aiming at the problem of too many redundant points and more turning points of paths generated by the Rapidly-exploring Random Tree algorithm (RRT), this paper proposes a path smoothing algorithm based on Douglas-Peucker algorithm and B-spline function to solve it. Firstly, the Douglas-Peucker (DP) algorithm is used to extract several nodes from the path nodes which generated by the RRT algorithm as key road signs. Then, in order to achieve a smooth planning path, the B-spline function is used to fit the key road signs to obtain a smooth path with continuous curvature. By experimenting in different environments and comparing the tests obtained by other path smoothing algorithms, the results show that the algorithm can significantly cut down the path length and reduce the transition number of optimized path, and it also greatly improve the smoothness of the optimized path. It is beneficial to reduce the energy consumption of the robot in a single voyage and make it complete more tasks, which can improve the robot's working efficiency effectively.







2020, 39(4): 561-566.
doi: 10.13433/j.cnki.1003-8728.20190160
Abstract:
In some very large machining enterprise of Inner Mongolia, for the boring bar rigidity of structure parts with large length to diameter ratio is poor, short of drawings processing precision requirements, a double dynamical vibration absorption boring system is designed, a dynamic model of the double dynamic vibration absorbing is established; based on the rule of optimization analysis of the vibration absorber, the effects of absorber mass ratio on the optimal frequency ratio, optimum damping ratio and the vibration isolation performance are studied. The boring and cutting vibration structure with double dynamic vibration absorber is designed. The boring and cutting vibration device is designed and processed by determining the optimal vibration reduction parameters. The ADAMS simulation results show that the damping effect of the damping device installed with the double dynamic vibration absorber is more than 4 times that of the one not installed. Cutting experiments show that the boring vibration absorber can improve the surface quality of machining parts.
In some very large machining enterprise of Inner Mongolia, for the boring bar rigidity of structure parts with large length to diameter ratio is poor, short of drawings processing precision requirements, a double dynamical vibration absorption boring system is designed, a dynamic model of the double dynamic vibration absorbing is established; based on the rule of optimization analysis of the vibration absorber, the effects of absorber mass ratio on the optimal frequency ratio, optimum damping ratio and the vibration isolation performance are studied. The boring and cutting vibration structure with double dynamic vibration absorber is designed. The boring and cutting vibration device is designed and processed by determining the optimal vibration reduction parameters. The ADAMS simulation results show that the damping effect of the damping device installed with the double dynamic vibration absorber is more than 4 times that of the one not installed. Cutting experiments show that the boring vibration absorber can improve the surface quality of machining parts.









2020, 39(4): 567-573.
doi: 10.13433/j.cnki.1003-8728.20190185
Abstract:
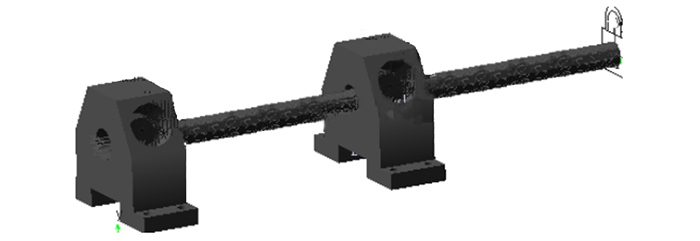
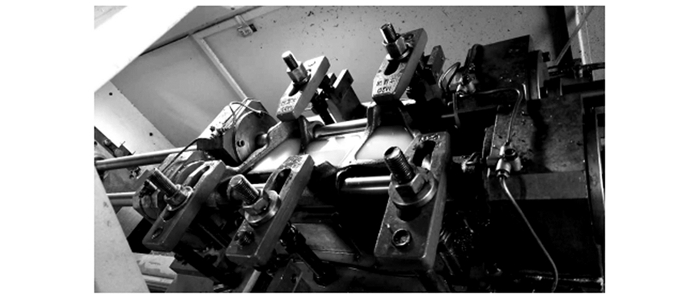
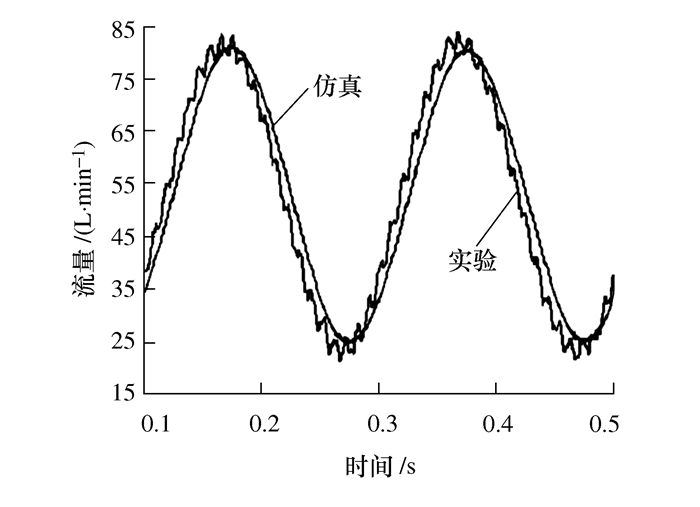
This paper presents a rotary excitation valve. In order to analyze the flow field distribution characteristics of the rotary valve in the rotation process, three types of valve cores with different geometric shapes are designed. Based on the semi-implicit connection pressure equation model, the flow field dynamic simulation of the excitation valve is carried out by the Multiple Reference Frame (MRF) sliding moving grid method, and the pressure, velocity, jet angle and flow characteristic curve of the excitation valve port are obtained. The results show that with the rotation of the valve core, the pressure and flow rate of the excitation valve increased at first and then decreased, the velocity decreased first and then increased, and the jet angle increased gradually in the range of 60~120 degrees. The shape of the valve port has a great influence on the pressure, speed and flow of the excitation valve. Among the three types of valve port, the pressure and flow characteristics of the rectangular valve port are optimal. The flow test proves that the flow curve of the excitation valve is approximately sinusoidal, and the error between simulation and experimental results is less than 5%.
This paper presents a rotary excitation valve. In order to analyze the flow field distribution characteristics of the rotary valve in the rotation process, three types of valve cores with different geometric shapes are designed. Based on the semi-implicit connection pressure equation model, the flow field dynamic simulation of the excitation valve is carried out by the Multiple Reference Frame (MRF) sliding moving grid method, and the pressure, velocity, jet angle and flow characteristic curve of the excitation valve port are obtained. The results show that with the rotation of the valve core, the pressure and flow rate of the excitation valve increased at first and then decreased, the velocity decreased first and then increased, and the jet angle increased gradually in the range of 60~120 degrees. The shape of the valve port has a great influence on the pressure, speed and flow of the excitation valve. Among the three types of valve port, the pressure and flow characteristics of the rectangular valve port are optimal. The flow test proves that the flow curve of the excitation valve is approximately sinusoidal, and the error between simulation and experimental results is less than 5%.









2020, 39(4): 574-580.
doi: 10.13433/j.cnki.1003-8728.20190177
Abstract:
A method for positioning the workpieces on a flexible fixture with array structure is proposed. Firstly, a projection method is used to transform the positioning problem between the workpieces and the flexible fixture into the positioning problem of planar graphics. And multiple positioning schemes are generated based on the inclusion relationship between the planar regions and points. Then the reliabilities of the positioning schemes are determined by calculating the rank of positioning Jacobian matrixes. Finally, the transfer model from the manufacturing errors of workpieces, installation and manufacturing errors of positioning elements to the workpiece positioning errors is established, and the accuracy of positioning schemes is calculated according to the requirement of workpiece positioning errors, and the most accurate positioning scheme is selected in terms of the criterion of minimizing maximum deviation. Examples of workpiece positioning on the array type flexible fixture show that the present method can obtain the positioning schemes that meet the requirements of positioning reliability and accuracy.
A method for positioning the workpieces on a flexible fixture with array structure is proposed. Firstly, a projection method is used to transform the positioning problem between the workpieces and the flexible fixture into the positioning problem of planar graphics. And multiple positioning schemes are generated based on the inclusion relationship between the planar regions and points. Then the reliabilities of the positioning schemes are determined by calculating the rank of positioning Jacobian matrixes. Finally, the transfer model from the manufacturing errors of workpieces, installation and manufacturing errors of positioning elements to the workpiece positioning errors is established, and the accuracy of positioning schemes is calculated according to the requirement of workpiece positioning errors, and the most accurate positioning scheme is selected in terms of the criterion of minimizing maximum deviation. Examples of workpiece positioning on the array type flexible fixture show that the present method can obtain the positioning schemes that meet the requirements of positioning reliability and accuracy.





2020, 39(4): 581-589.
doi: 10.13433/j.cnki.1003-8728.20190190
Abstract:
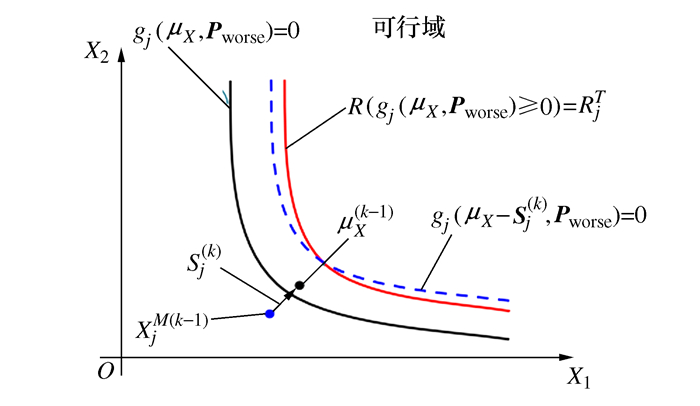
The traditional reliability-based design optimization (RBDO), which is based on probabilistic model, can guarantee the reliability of structure by formulating probabilistic constraints. However, it is difficult to obtain the accurate probability density function of parameter when the parameter information is limited. Meanwhile, the reliability robustness is not fully considered in optimization. In this paper, the non-probabilistic convex model is utilized to measure the uncertainty of parameter with insufficient information. Based on the theory of non-probabilistic reliability analysis, Taylor expansion is conducted for the limit-state function, and the robustness index of non-probabilistic reliability is formulated through the sensitivity analysis of non-probabilistic reliability index. Then, a unified design framework integrating the reliability-based design with robust design is established. The optimization can be implemented efficiently by combining the sequential optimization and reliability assessment (SORA) and the micro multi-objective genetic algorithm. Two engineering applications are presented to demonstrate the effectiveness of the optimization model.
The traditional reliability-based design optimization (RBDO), which is based on probabilistic model, can guarantee the reliability of structure by formulating probabilistic constraints. However, it is difficult to obtain the accurate probability density function of parameter when the parameter information is limited. Meanwhile, the reliability robustness is not fully considered in optimization. In this paper, the non-probabilistic convex model is utilized to measure the uncertainty of parameter with insufficient information. Based on the theory of non-probabilistic reliability analysis, Taylor expansion is conducted for the limit-state function, and the robustness index of non-probabilistic reliability is formulated through the sensitivity analysis of non-probabilistic reliability index. Then, a unified design framework integrating the reliability-based design with robust design is established. The optimization can be implemented efficiently by combining the sequential optimization and reliability assessment (SORA) and the micro multi-objective genetic algorithm. Two engineering applications are presented to demonstrate the effectiveness of the optimization model.









2020, 39(4): 590-598.
doi: 10.13433/j.cnki.1003-8728.20190156
Abstract:
With the development of Industry 4.0, CPS and Intelligent manufacturing, how to solve the interaction and integration between the physical world and the information world in manufacturing has become a key problem that further promote the transformation of manufacturing industry. In this context, the concept and technical system of digital twin to solve the above-mentioned problems was put forward in the research and industry. In order to get a comprehensive understanding of digital twin research progress, the basic concept of digital twin is sorted out, and the application progress of digital twin are summarized from the aerospace, product, manufacturing equipment and manufacturing workshop. The relationship and difference among the digital twin and Internet of things, big data and CPS are analyzed. Finally, the development trend of digital twin in manufacturing are pointed out.
With the development of Industry 4.0, CPS and Intelligent manufacturing, how to solve the interaction and integration between the physical world and the information world in manufacturing has become a key problem that further promote the transformation of manufacturing industry. In this context, the concept and technical system of digital twin to solve the above-mentioned problems was put forward in the research and industry. In order to get a comprehensive understanding of digital twin research progress, the basic concept of digital twin is sorted out, and the application progress of digital twin are summarized from the aerospace, product, manufacturing equipment and manufacturing workshop. The relationship and difference among the digital twin and Internet of things, big data and CPS are analyzed. Finally, the development trend of digital twin in manufacturing are pointed out.






2020, 39(4): 599-607.
doi: 10.13433/j.cnki.1003-8728.20190174
Abstract:
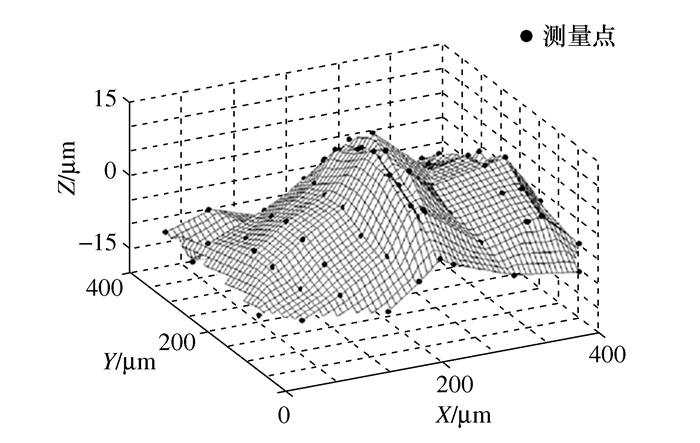
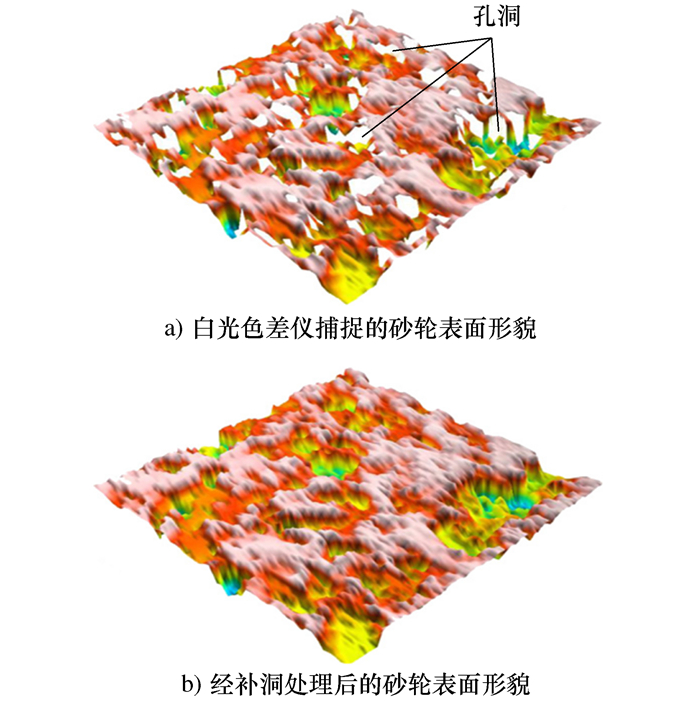
The grinding wheel is known as the industrial tooth, and the surface characteristic parameters (including micro-topography characteristics, macro-profile characteristics) are important input parameters in the grinding process. They are the key factors that determine the grinding performance and service life of the grinding wheel, which in turn affects the surface integrity and surface accuracy of the workpiece. The surface of the grinding wheel changes rapidly in the grinding process. Therefore, the study on the surface measurement of the grinding wheel is of the great significance for evaluating the grinding performance, optimizing the grinding process and revealing the grinding mechanism, and which is always an important research topic in the field of grinding. The basic principle, research progress and development bottleneck of the direct measurement method of the grinding wheel surface are summarized, and the future research directions of each measurement method are predicted, which provides a reference for selecting the measurement method of the grinding wheel surface and indicates the direction in the measurement research of the grinding wheel surface.
The grinding wheel is known as the industrial tooth, and the surface characteristic parameters (including micro-topography characteristics, macro-profile characteristics) are important input parameters in the grinding process. They are the key factors that determine the grinding performance and service life of the grinding wheel, which in turn affects the surface integrity and surface accuracy of the workpiece. The surface of the grinding wheel changes rapidly in the grinding process. Therefore, the study on the surface measurement of the grinding wheel is of the great significance for evaluating the grinding performance, optimizing the grinding process and revealing the grinding mechanism, and which is always an important research topic in the field of grinding. The basic principle, research progress and development bottleneck of the direct measurement method of the grinding wheel surface are summarized, and the future research directions of each measurement method are predicted, which provides a reference for selecting the measurement method of the grinding wheel surface and indicates the direction in the measurement research of the grinding wheel surface.












2020, 39(4): 608-614.
doi: 10.13433/j.cnki.1003-8728.20190155
Abstract:
The variable crown roll contour is widely used in the shape control of strip rolling due to its excellent crown control ability, but the variable crown roll contour has its asymmetrical wear due to its own structural characteristics. And the main factor considered in the design process of the variable crown roll contour is the crown control ability. Aiming at the above situation, an adaptive design method of discrete variable crown roll contour is proposed. The genetic algorithms is used to optimize the roll contour data. The design method uses the crown control ability and the roll wear amount as the roll shape evaluation index, and the fitness function of the genetic algorithm to optimize the design roll curve is established. Comparing the CVC(Continuously Variable Crown) roll contour, it is found that the discrete roll shape optimized by the genetic algorithm improves the wear resistance of the roll under the premise of ensuring the convexity control ability. Comparing with the conventional design method, the design method also has better expandability and flexibility.
The variable crown roll contour is widely used in the shape control of strip rolling due to its excellent crown control ability, but the variable crown roll contour has its asymmetrical wear due to its own structural characteristics. And the main factor considered in the design process of the variable crown roll contour is the crown control ability. Aiming at the above situation, an adaptive design method of discrete variable crown roll contour is proposed. The genetic algorithms is used to optimize the roll contour data. The design method uses the crown control ability and the roll wear amount as the roll shape evaluation index, and the fitness function of the genetic algorithm to optimize the design roll curve is established. Comparing the CVC(Continuously Variable Crown) roll contour, it is found that the discrete roll shape optimized by the genetic algorithm improves the wear resistance of the roll under the premise of ensuring the convexity control ability. Comparing with the conventional design method, the design method also has better expandability and flexibility.







2020, 39(4): 615-622.
doi: 10.13433/j.cnki.1003-8728.20190182
Abstract:
In order to solve the surface fitting problem before and after slow tool servo machining, this paper combines Zernike polynomial with moving least squares and proposes Zernike polynomial local fitting algorithm. In this paper, the Gram-Schmidt orthogonalization algorithm is used to construct the orthogonal basis function. This method solves the problems of the ill-conditioned matrix problem and the large amount of matrix inversion in the calculation process of the fitting algorithm. The support domain radius in the local fitting has a significant influence on the fitting accuracy. Based on this, the support domain radius optimization algorithm is proposed. Taking progressive-addition lenses, toric surface and sinusoidal array surface as examples, the accuracy of the cutting location points and the goodness of fit R-square, which are closely related to the slow tool servo machining, are used as the evaluation criteria. Numerical simulation is carried out in MATLAB software, the results show that the Zernike polynomial local fitting algorithm is better than the moving least squares method, and after the support domain radius optimization, the algorithm not only further improves the accuracy and the goodness of fit, but also improves the discrete degree on the cutting location points error.
In order to solve the surface fitting problem before and after slow tool servo machining, this paper combines Zernike polynomial with moving least squares and proposes Zernike polynomial local fitting algorithm. In this paper, the Gram-Schmidt orthogonalization algorithm is used to construct the orthogonal basis function. This method solves the problems of the ill-conditioned matrix problem and the large amount of matrix inversion in the calculation process of the fitting algorithm. The support domain radius in the local fitting has a significant influence on the fitting accuracy. Based on this, the support domain radius optimization algorithm is proposed. Taking progressive-addition lenses, toric surface and sinusoidal array surface as examples, the accuracy of the cutting location points and the goodness of fit R-square, which are closely related to the slow tool servo machining, are used as the evaluation criteria. Numerical simulation is carried out in MATLAB software, the results show that the Zernike polynomial local fitting algorithm is better than the moving least squares method, and after the support domain radius optimization, the algorithm not only further improves the accuracy and the goodness of fit, but also improves the discrete degree on the cutting location points error.








2020, 39(4): 623-628.
doi: 10.13433/j.cnki.1003-8728.20190176
Abstract:
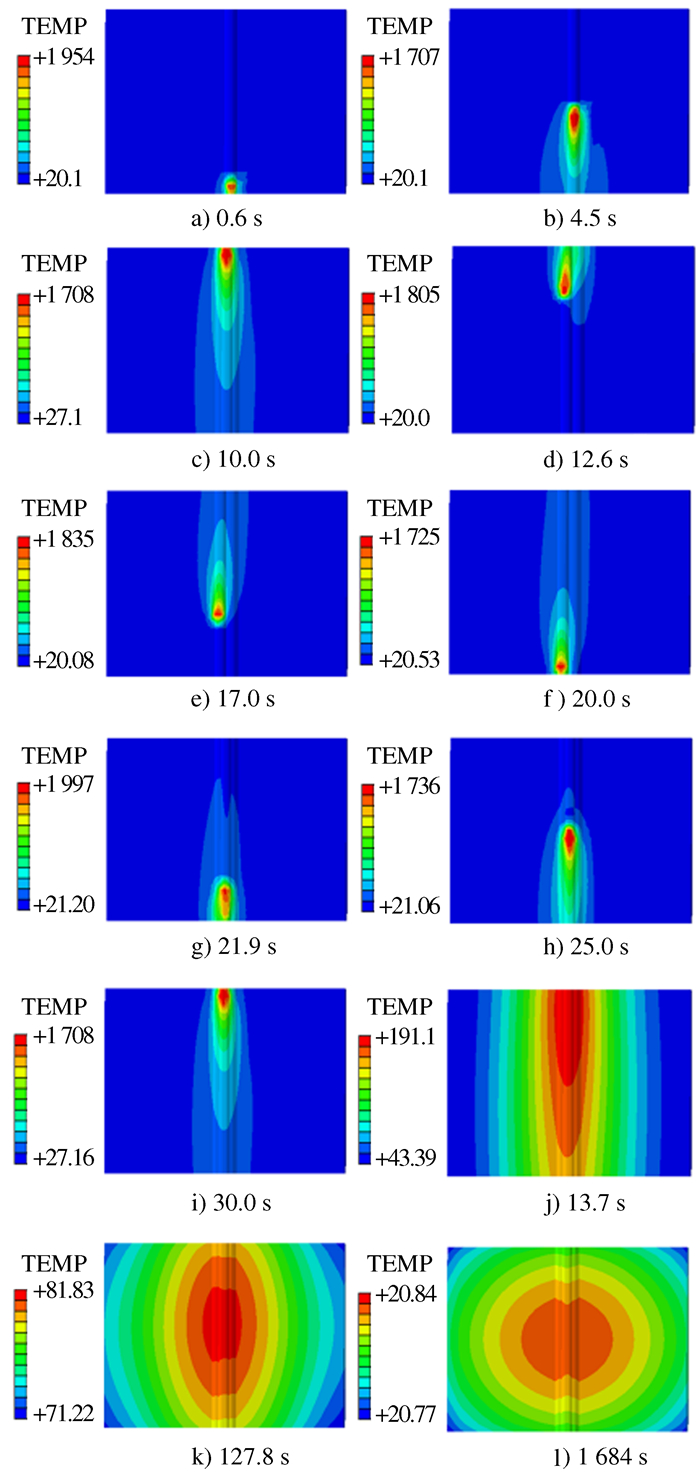
In the multi-layer fuse-adding process, a great deal of residual stress and deformation will be generated due to the highly concentrated instantaneous heat input. The investigation of residual stress evolution is of the significance to the process design of multi-layer fuse-adding. In this paper, a new welding heat sources were planted in ABAQUS software to establish the three-dimensional model for multi-layer fuse-adding. The temperature and stress fields in the multi-layer fuse-adding process are simulated and analyzed dynamically. In addition, the effects of the fuse-adding parameters including line energy, fuse speed and preheating temperature on the residual stress are also investigated. The results show that the high line energy, low fuse speed and high preheating temperature can reduce effectively the residual stress in a certain range.
In the multi-layer fuse-adding process, a great deal of residual stress and deformation will be generated due to the highly concentrated instantaneous heat input. The investigation of residual stress evolution is of the significance to the process design of multi-layer fuse-adding. In this paper, a new welding heat sources were planted in ABAQUS software to establish the three-dimensional model for multi-layer fuse-adding. The temperature and stress fields in the multi-layer fuse-adding process are simulated and analyzed dynamically. In addition, the effects of the fuse-adding parameters including line energy, fuse speed and preheating temperature on the residual stress are also investigated. The results show that the high line energy, low fuse speed and high preheating temperature can reduce effectively the residual stress in a certain range.












2020, 39(4): 629-634.
doi: 10.13433/j.cnki.1003-8728.20200005
Abstract:
To investigate the structure of Pd-Si metallic glass and the structure evolution in the glass transition process, molecular dynamics (MD) simulation was performed to simulate the glass transition process from liquid to glassy state by adopting the pair distribution functions and Voronoi Polyhedra analysis to characterize the atomic-level structure. The simulated results of the glass transition temperature and pair distribution functions of the alloy liquid from the MD simulation are in a good agreement with the experimental. In the structure of metallic glass, Pd and Si atoms tend to attract each other and lie on the positions of the first neighbor, while the repulsive interaction among Si and Si atoms results in the larger distance. From the aspect of short-range order(SRO), there is no dominant SRO around Pd atoms, while Z9 and Z10 are the dominant SROs around Si atoms. In addition, the coordination number increases slightly with the decreasing of temperature, , the fraction of the SRO and the degree of the five-fold local symmetry increase significantly, and the SRO connects more firmly with each other.
To investigate the structure of Pd-Si metallic glass and the structure evolution in the glass transition process, molecular dynamics (MD) simulation was performed to simulate the glass transition process from liquid to glassy state by adopting the pair distribution functions and Voronoi Polyhedra analysis to characterize the atomic-level structure. The simulated results of the glass transition temperature and pair distribution functions of the alloy liquid from the MD simulation are in a good agreement with the experimental. In the structure of metallic glass, Pd and Si atoms tend to attract each other and lie on the positions of the first neighbor, while the repulsive interaction among Si and Si atoms results in the larger distance. From the aspect of short-range order(SRO), there is no dominant SRO around Pd atoms, while Z9 and Z10 are the dominant SROs around Si atoms. In addition, the coordination number increases slightly with the decreasing of temperature, , the fraction of the SRO and the degree of the five-fold local symmetry increase significantly, and the SRO connects more firmly with each other.






2020, 39(4): 635-640.
doi: 10.13433/j.cnki.1003-8728.20200004
Abstract:
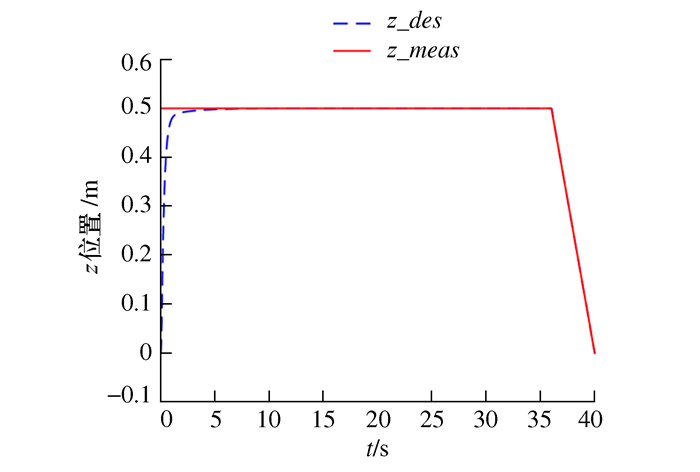
In order to improve the passage of the quadrotor in the internal narrow space such as the earthquake disaster site, a new type of rotor-tilted quadrotor is proposed in this paper. Compared with the traditional quadrotors, an additional tilting degree of freedom is added in this quadrotor, enabling the four propellers synchronously to tilt in the same direction, and the configuration of the quadrotor can be changed to adapt to the narrow space. A dynamic mathematical model of the tilt-deformable quadrotor is established. In the Simulink/SimMechanics simulation environment, a flight dynamics model of the quadrotor is built, and the cascade PID controller is designed, and the quadrotor can hover and fly in the tilting state, the flight motion and the trajectory tracking of the quadrotor through a narrow space are analyzed. The simulation results show that the configuration design and simulation system of the tilt-deformable quadrotor are feasible.
In order to improve the passage of the quadrotor in the internal narrow space such as the earthquake disaster site, a new type of rotor-tilted quadrotor is proposed in this paper. Compared with the traditional quadrotors, an additional tilting degree of freedom is added in this quadrotor, enabling the four propellers synchronously to tilt in the same direction, and the configuration of the quadrotor can be changed to adapt to the narrow space. A dynamic mathematical model of the tilt-deformable quadrotor is established. In the Simulink/SimMechanics simulation environment, a flight dynamics model of the quadrotor is built, and the cascade PID controller is designed, and the quadrotor can hover and fly in the tilting state, the flight motion and the trajectory tracking of the quadrotor through a narrow space are analyzed. The simulation results show that the configuration design and simulation system of the tilt-deformable quadrotor are feasible.












2020, 39(4): 641-647.
doi: 10.13433/j.cnki.1003-8728.20190154
Abstract:
In order to evaluate the human-robot interaction performance of the assistive assembly exoskeleton, 10 workers attended the subjective and objective experiments which were designed to test the subjects' muscle activities, hand contact pressure and the subjective extended NASA-TLX rating scales under the conditions of with and without exoskeleton in the laboratory. The results showed that the assistive assembly exoskeleton can help to decrease 8.6% of the muscle activities, 20% of the hand contact pressures of the overall upper right arm compared with the bare hand operations. And better benefits were acquired in the upper arm muscle activities, decreasing up to 20%. However the assistive assembly exoskeleton increased the muscle activities of the forearm, limited the operation flexibility as well. The results of the extended NASA-TLX rating scales illustrated that the physical demands were decreased, operation performances were increased. However the mental demands and frustration were also added. So the assistive exoskeleton helps to decrease the physical demands of the workers, but the adaptability of the exoskeleton should be further improved.
In order to evaluate the human-robot interaction performance of the assistive assembly exoskeleton, 10 workers attended the subjective and objective experiments which were designed to test the subjects' muscle activities, hand contact pressure and the subjective extended NASA-TLX rating scales under the conditions of with and without exoskeleton in the laboratory. The results showed that the assistive assembly exoskeleton can help to decrease 8.6% of the muscle activities, 20% of the hand contact pressures of the overall upper right arm compared with the bare hand operations. And better benefits were acquired in the upper arm muscle activities, decreasing up to 20%. However the assistive assembly exoskeleton increased the muscle activities of the forearm, limited the operation flexibility as well. The results of the extended NASA-TLX rating scales illustrated that the physical demands were decreased, operation performances were increased. However the mental demands and frustration were also added. So the assistive exoskeleton helps to decrease the physical demands of the workers, but the adaptability of the exoskeleton should be further improved.








2020, 39(4): 648-656.
doi: 10.13433/j.cnki.1003-8728.20190158
Abstract:
Inward-bonded Patch technology is a common method to repair Fiber Reinforce Plastics (FRPs) parts with the defect and damage. There is an urgent need for an in-place machining tool in the machining of concave step structure. Such thin-walled weakly rigid parts are easily deformed under the pressure. Therefore, the lightweight design of the machine bed to reduce the influence of the compression deformation on the machining quality. A ringed basalt fiber polymer composite (BFPC) bed of the prototype machine tool is taken as the research object. Firstly, the comprehensive performance of the bed under the working condition is defined based on the analysis via finite element method. Then, the optimal topology results of the bed are obtained by using the topology optimization technique. Furthermore, the main geometrical parameters that affect the mass and the comprehensive performance of the bed are identified based on the regularization of the topological structure and the orthogonal experiment method. Finally, a multi-objective optimization function with the regularization structure parameters as variables and the minimum mass of the bed and the minimum amplitude as objectives is established, and the optimal topology and performance are obtained.
Inward-bonded Patch technology is a common method to repair Fiber Reinforce Plastics (FRPs) parts with the defect and damage. There is an urgent need for an in-place machining tool in the machining of concave step structure. Such thin-walled weakly rigid parts are easily deformed under the pressure. Therefore, the lightweight design of the machine bed to reduce the influence of the compression deformation on the machining quality. A ringed basalt fiber polymer composite (BFPC) bed of the prototype machine tool is taken as the research object. Firstly, the comprehensive performance of the bed under the working condition is defined based on the analysis via finite element method. Then, the optimal topology results of the bed are obtained by using the topology optimization technique. Furthermore, the main geometrical parameters that affect the mass and the comprehensive performance of the bed are identified based on the regularization of the topological structure and the orthogonal experiment method. Finally, a multi-objective optimization function with the regularization structure parameters as variables and the minimum mass of the bed and the minimum amplitude as objectives is established, and the optimal topology and performance are obtained.














