


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2020 Vol. 39, No. 5
Display Method:
2020, 39(5): 657-661.
doi: 10.13433/j.cnki.1003-8728.20200050
 PDF 1001KB
PDF 1001KB
Abstract:
To improve turbine efficiency at low-speed flow, the computational fluid dynamics software Fluent was used to simulate numerically the blades designed to work at low speed flow for researching the effect of tip speed ratio on the power characteristics and flow field characteristics of low-speed turbine blades. The simulation results show that the tip speed ratio not only affects the flow field around the blade, but also has a certain effect on the wake field of the turbine, and the smaller the tip speed ratio is, the faster the wake field recovers.
To improve turbine efficiency at low-speed flow, the computational fluid dynamics software Fluent was used to simulate numerically the blades designed to work at low speed flow for researching the effect of tip speed ratio on the power characteristics and flow field characteristics of low-speed turbine blades. The simulation results show that the tip speed ratio not only affects the flow field around the blade, but also has a certain effect on the wake field of the turbine, and the smaller the tip speed ratio is, the faster the wake field recovers.









2020, 39(5): 662-667.
doi: 10.13433/j.cnki.1003-8728.20190206
Abstract:
In this paper, the coated steel plate is taken as the research object, and the nonlinear vibration of the moving film and the adhesion of the coated steel film are studied. ANSYS was used to simulate the influence of different film angle on the motion of moving film and the variation law of tensile and compressive stress in each frequency interval was analyzed. The adhesion performance of the filmed steel was tested by cupping experiment. The results show that: the film angle of 45° is the critical angle of the moving film, and the nonlinear vibration effect of the moving film at the film angle of 40° is the best. The amplitude and frequency of the moving film of the film angle of 30° and 35° are the same. In the range of 550~1 100 Hz and 1 950~2 100 Hz, the stress changes of the film angle of 30°, 35° and 40° are the same in each axial direction; the adhesion performance of the filmed steel of 30°, 35° and 40° film angle is measured by cupping test. The film adhesion property and the film angle of the coating film of 40° are the best.
In this paper, the coated steel plate is taken as the research object, and the nonlinear vibration of the moving film and the adhesion of the coated steel film are studied. ANSYS was used to simulate the influence of different film angle on the motion of moving film and the variation law of tensile and compressive stress in each frequency interval was analyzed. The adhesion performance of the filmed steel was tested by cupping experiment. The results show that: the film angle of 45° is the critical angle of the moving film, and the nonlinear vibration effect of the moving film at the film angle of 40° is the best. The amplitude and frequency of the moving film of the film angle of 30° and 35° are the same. In the range of 550~1 100 Hz and 1 950~2 100 Hz, the stress changes of the film angle of 30°, 35° and 40° are the same in each axial direction; the adhesion performance of the filmed steel of 30°, 35° and 40° film angle is measured by cupping test. The film adhesion property and the film angle of the coating film of 40° are the best.












2020, 39(5): 668-675.
doi: 10.13433/j.cnki.1003-8728.20190199
Abstract:
With the development of offshore deepwater drilling technology, the stability and safety of riser system is becoming more and more important. The research literature is based on the hypothesis that the ocean water is isotropic. However, it is found that the mechanical response analysis based on neglecting the viscosity difference of ocean water and setting the relevant wave parameters and current parameters is oversimplified. In order to study the dynamic response of riser in underwater mechanics in more detail, this paper establishes relevant vibration model under the influence of viscosity difference, carries out numerical solution and curve fitting with MATLAB. Through horizontal vibration analysis and longitudinal comparison of riser in different depths, it is found that the platform drift will cause the bending moment and shear force of riser. On the other hand, with the increase of water depth, the instability of flexible riser increases gradually, and the influence of ocean current force on riser will be stronger than that of wave force on riser.
With the development of offshore deepwater drilling technology, the stability and safety of riser system is becoming more and more important. The research literature is based on the hypothesis that the ocean water is isotropic. However, it is found that the mechanical response analysis based on neglecting the viscosity difference of ocean water and setting the relevant wave parameters and current parameters is oversimplified. In order to study the dynamic response of riser in underwater mechanics in more detail, this paper establishes relevant vibration model under the influence of viscosity difference, carries out numerical solution and curve fitting with MATLAB. Through horizontal vibration analysis and longitudinal comparison of riser in different depths, it is found that the platform drift will cause the bending moment and shear force of riser. On the other hand, with the increase of water depth, the instability of flexible riser increases gradually, and the influence of ocean current force on riser will be stronger than that of wave force on riser.









2020, 39(5): 676-681.
doi: 10.13433/j.cnki.1003-8728.20190191
Abstract:
Compared with the torsional stiffness, the axial stiffness of the diaphragm coupling is smaller. Therefore, the natural frequency and critical speed of the axial vibration are lower, and the diaphragm coupling is more susceptible to the influence of the axial displacement of the equipment on both sides. In this paper, a new type of coupling is taken as the research object, the axial vibration modes of the coupling are analyzed with the finite element method and the centralized parameter method, and the axial stiffness of the diaphragm coupling under different axial displacement, rotating speed and torque is studied. Based on the above, the effects of axial displacement and rotating speed on the axial natural frequency and critical rotating speed of the diaphragm coupling are investigated. The research result shows that the accuracy of the two models can be verified by comparing the modal analysis results of the finite element model and the centralized parameter set model of the diaphragm coupling. With the increase of the axial absolute displacement, the axial stress stiffening of the diaphragm appears and the axial stiffness presents a nonlinear change. The axial stiffness of the diaphragm coupling is positively correlated with the rotating speed, and the critical rotating speed of each stage is distinctly affected by the rotating speed and the axial displacement. This study provides a basis for the optimization and application of the diaphragm coupling.
Compared with the torsional stiffness, the axial stiffness of the diaphragm coupling is smaller. Therefore, the natural frequency and critical speed of the axial vibration are lower, and the diaphragm coupling is more susceptible to the influence of the axial displacement of the equipment on both sides. In this paper, a new type of coupling is taken as the research object, the axial vibration modes of the coupling are analyzed with the finite element method and the centralized parameter method, and the axial stiffness of the diaphragm coupling under different axial displacement, rotating speed and torque is studied. Based on the above, the effects of axial displacement and rotating speed on the axial natural frequency and critical rotating speed of the diaphragm coupling are investigated. The research result shows that the accuracy of the two models can be verified by comparing the modal analysis results of the finite element model and the centralized parameter set model of the diaphragm coupling. With the increase of the axial absolute displacement, the axial stress stiffening of the diaphragm appears and the axial stiffness presents a nonlinear change. The axial stiffness of the diaphragm coupling is positively correlated with the rotating speed, and the critical rotating speed of each stage is distinctly affected by the rotating speed and the axial displacement. This study provides a basis for the optimization and application of the diaphragm coupling.



















2020, 39(5): 682-687.
doi: 10.13433/j.cnki.1003-8728.20200049
Abstract:
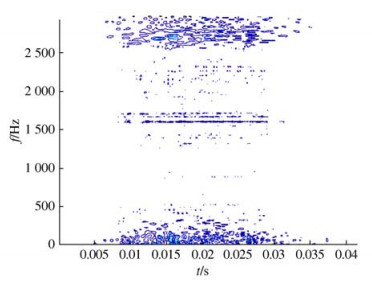
To solve the excessive vibration problems encountered by the driving cab of a construction machine, this paper conducts evaluation and optimization for the vibration reduction performance of the cab by combing the experimental test and CAE (Computer Aided Engineering) simulation. The reasons for the excessive vibration problems of the cab are explored by analyzing the spectrogram of the vibration acceleration at each measuring point. Also, modal analysis is performed with the shell element model to realize failure reappearance. Further, based on the simulation results, the cab is optimized and the optimization method is verified. The results show that the vibration amplification problems of the cab are caused by resonance between the mode of the cab floor and the excitation frequency of the engine around 50 Hz and 80 Hz. By optimizing the cab structure, the resonance with the excitation frequency of the engine is avoided. Moreover, the vibration transmission rate meets the requirement of less than 70%, and thus the purpose of vibration reduction is achieved.
To solve the excessive vibration problems encountered by the driving cab of a construction machine, this paper conducts evaluation and optimization for the vibration reduction performance of the cab by combing the experimental test and CAE (Computer Aided Engineering) simulation. The reasons for the excessive vibration problems of the cab are explored by analyzing the spectrogram of the vibration acceleration at each measuring point. Also, modal analysis is performed with the shell element model to realize failure reappearance. Further, based on the simulation results, the cab is optimized and the optimization method is verified. The results show that the vibration amplification problems of the cab are caused by resonance between the mode of the cab floor and the excitation frequency of the engine around 50 Hz and 80 Hz. By optimizing the cab structure, the resonance with the excitation frequency of the engine is avoided. Moreover, the vibration transmission rate meets the requirement of less than 70%, and thus the purpose of vibration reduction is achieved.







2020, 39(5): 688-694.
doi: 10.13433/j.cnki.1003-8728.20190192
Abstract:
Aiming at the problem that the general EMD-WVD method has insufficient information for extracting time-frequency image, a new fault diagnosis method for rolling bearing based on CEEMD-WVD multi-scale time-frequency image is proposed. The complementary ensemble empirical mode decomposition (CEEMD) method was adopted in order to decompose the fault vibration signal and adaptively obtained the intrinsic mode function (IMF) components of different frequency bands. By selecting IMF modal components of the first few high frequency signals, time-frequency analysis was performed on each IMF component using Wigner-Ville distribution (WVD), and further converted it into a corresponding multi-scale time-frequency image. Then the local binary (LBP) texture features of each time-frequency image were extracted, and the SVM classifier was trained with these features. Finally, the trained classifier was used to recognize faults of different bearing vibration signals. The experimental results show that the method has strong adaptability and can generate high-resolution images, and the fault recognition rate is high. The five types of faults are tested on the rolling bearing database of Case Western Reserve University (CWRU), and the diagnostic accuracy rate is up to 99.75%.
Aiming at the problem that the general EMD-WVD method has insufficient information for extracting time-frequency image, a new fault diagnosis method for rolling bearing based on CEEMD-WVD multi-scale time-frequency image is proposed. The complementary ensemble empirical mode decomposition (CEEMD) method was adopted in order to decompose the fault vibration signal and adaptively obtained the intrinsic mode function (IMF) components of different frequency bands. By selecting IMF modal components of the first few high frequency signals, time-frequency analysis was performed on each IMF component using Wigner-Ville distribution (WVD), and further converted it into a corresponding multi-scale time-frequency image. Then the local binary (LBP) texture features of each time-frequency image were extracted, and the SVM classifier was trained with these features. Finally, the trained classifier was used to recognize faults of different bearing vibration signals. The experimental results show that the method has strong adaptability and can generate high-resolution images, and the fault recognition rate is high. The five types of faults are tested on the rolling bearing database of Case Western Reserve University (CWRU), and the diagnostic accuracy rate is up to 99.75%.








2020, 39(5): 695-700.
doi: 10.13433/j.cnki.1003-8728.20190204
Abstract:
The lowerlimb exoskeleton robot is an intelligent device which can assist walking and rehabilitation training. A passive ankle with the pneumatic spring of thelowerlimb exoskeleton robot was designedthrough analyzing the structure of human's ankle joint, and the passive ankle joint modelwas established.The data on one gait cycle of the hip and knee ankle on a normal walking person are obtained with the Opensim software and imported into ADAMS for simulating the designed lower limb exoskeleton robot with or without a pneumatic spring. The comparison with the two motion curves and the dynamics simulation results show thatthe walking gait and dynamicsof the designed lower limb exoskeleton robot is feasible and correct.
The lowerlimb exoskeleton robot is an intelligent device which can assist walking and rehabilitation training. A passive ankle with the pneumatic spring of thelowerlimb exoskeleton robot was designedthrough analyzing the structure of human's ankle joint, and the passive ankle joint modelwas established.The data on one gait cycle of the hip and knee ankle on a normal walking person are obtained with the Opensim software and imported into ADAMS for simulating the designed lower limb exoskeleton robot with or without a pneumatic spring. The comparison with the two motion curves and the dynamics simulation results show thatthe walking gait and dynamicsof the designed lower limb exoskeleton robot is feasible and correct.












2020, 39(5): 701-705.
doi: 10.13433/j.cnki.1003-8728.20190205
Abstract:
The mobile operating room (OR) is an important part of emergency rescue mission. So it is necessary to evaluate and optimizeits cleanliness. Firstly, the air distribution and the suspended particle concentration were tested and simulated to verify the accuracy and reliability of the simulation process. Based on the verified computational fluid dynamics (CFD) air distribution results, the structural optimization analysis of the air supply was carried out. The results show that the shape of the air supply has a great influence on the cleanliness of the surgical area, whosecleanliness was improved through air supply.It is of great significance to evaluate the cleanliness of emergencysurgical area and reduce the postoperative infection rate.
The mobile operating room (OR) is an important part of emergency rescue mission. So it is necessary to evaluate and optimizeits cleanliness. Firstly, the air distribution and the suspended particle concentration were tested and simulated to verify the accuracy and reliability of the simulation process. Based on the verified computational fluid dynamics (CFD) air distribution results, the structural optimization analysis of the air supply was carried out. The results show that the shape of the air supply has a great influence on the cleanliness of the surgical area, whosecleanliness was improved through air supply.It is of great significance to evaluate the cleanliness of emergencysurgical area and reduce the postoperative infection rate.













2020, 39(5): 706-713.
doi: 10.13433/j.cnki.1003-8728.20190200
Abstract:
In view of the problem that the inverse kinematics solution of mining robot actuator is difficult and slow, an inverse kinematics solution method based on the improved neural network is proposed. The Adaptive Particle Swarm Optimization (APSO) algorithms is used to optimize the connection weights and thresholds in the Back Propagation (BP) neural networks, then the gradient descent method in the training process of BP neural networks is replaced with Levenberg Marquardt (LM) algorithm. The simulation results show that comparing with the traditional BP neural networks, the output error of the APSO-LM-BP neural networks and the training time decreases greatly, the convergence precision and convergence speed of the algorithm are improved, and the inverse kinematics solution of the mining robot is satisfied. The present method can be extended to solve the inverse kinematics of a series robot with the arbitrary degrees of freedom.
In view of the problem that the inverse kinematics solution of mining robot actuator is difficult and slow, an inverse kinematics solution method based on the improved neural network is proposed. The Adaptive Particle Swarm Optimization (APSO) algorithms is used to optimize the connection weights and thresholds in the Back Propagation (BP) neural networks, then the gradient descent method in the training process of BP neural networks is replaced with Levenberg Marquardt (LM) algorithm. The simulation results show that comparing with the traditional BP neural networks, the output error of the APSO-LM-BP neural networks and the training time decreases greatly, the convergence precision and convergence speed of the algorithm are improved, and the inverse kinematics solution of the mining robot is satisfied. The present method can be extended to solve the inverse kinematics of a series robot with the arbitrary degrees of freedom.









2020, 39(5): 714-720.
doi: 10.13433/j.cnki.1003-8728.20190212
Abstract:
When the observer is used to estimate the uncertainty of model parameters and unknown external dynamic disturbance in the trajectory tracking control of the manipulator, the estimated time is easily affected by the initial value of the disturbance. An adaptive sliding mode trajectory tracking control method based on fixed time disturbance observer is designed in this paper. Using the characteristics of the fixed time observer, the estimation of the internal model error and external uncertain disturbance of the manipulator is obtained in the fixed time, and the disturbance estimation is compensated. Aiming at the chattering characteristics of sliding mode control, an improved approach law of sliding mode controller is designed to suppress chattering. The simulation results show that the synovial control method based on the fixed time disturbance observer can accurately obtain the disturbance estimation in the fixed time and control the robot arm to track the given trajectory with higher precision. Through the simulation comparison with the sliding mode control method based on high-order disturbance observer, it is verified that this method can effectively suppress the chattering of the system on the basis of eliminating the uncertain disturbance, and the tracking error can complete the convergence at the exponential rate in a short time.
When the observer is used to estimate the uncertainty of model parameters and unknown external dynamic disturbance in the trajectory tracking control of the manipulator, the estimated time is easily affected by the initial value of the disturbance. An adaptive sliding mode trajectory tracking control method based on fixed time disturbance observer is designed in this paper. Using the characteristics of the fixed time observer, the estimation of the internal model error and external uncertain disturbance of the manipulator is obtained in the fixed time, and the disturbance estimation is compensated. Aiming at the chattering characteristics of sliding mode control, an improved approach law of sliding mode controller is designed to suppress chattering. The simulation results show that the synovial control method based on the fixed time disturbance observer can accurately obtain the disturbance estimation in the fixed time and control the robot arm to track the given trajectory with higher precision. Through the simulation comparison with the sliding mode control method based on high-order disturbance observer, it is verified that this method can effectively suppress the chattering of the system on the basis of eliminating the uncertain disturbance, and the tracking error can complete the convergence at the exponential rate in a short time.








2020, 39(5): 721-728.
doi: 10.13433/j.cnki.1003-8728.20190198
Abstract:
Owing to the traditional flexible job shop scheduling problem (FJSP) has the limitations which only consider completion time, equipment utilization, and completion cost et al as the criterion, a low carbon FJSP model with the criterion of minimizing the weighted sum of carbon consumption cost and completion-time cost has been established, and an improved whale optimization algorithm (IWOA) has been proposed. Firstly, a two-segment string is used to describe the FJSP, and a conversion method based on the ranked-order-value (ROV) rule has been introduced to implement the conversion between the whale individual position vector and the scheduling solution. Secondly, a hybrid population initialization strategy based on a certain proportion of global search, local search and random search is used to generate the initial population with certain quality, and then, a nonlinear convergence factor (NFC) and an adaptive weight (AW) are introduced to coordinate the abilities of exploitation and exploration of the algorithm. Thirdly, an adaptive adjustment search strategy is employed to enhance the ability of exploitation of the algorithm. Finally, the experimental data have verified the effectiveness of the improved whale algorithm in solving the low-carbon FJSP.
Owing to the traditional flexible job shop scheduling problem (FJSP) has the limitations which only consider completion time, equipment utilization, and completion cost et al as the criterion, a low carbon FJSP model with the criterion of minimizing the weighted sum of carbon consumption cost and completion-time cost has been established, and an improved whale optimization algorithm (IWOA) has been proposed. Firstly, a two-segment string is used to describe the FJSP, and a conversion method based on the ranked-order-value (ROV) rule has been introduced to implement the conversion between the whale individual position vector and the scheduling solution. Secondly, a hybrid population initialization strategy based on a certain proportion of global search, local search and random search is used to generate the initial population with certain quality, and then, a nonlinear convergence factor (NFC) and an adaptive weight (AW) are introduced to coordinate the abilities of exploitation and exploration of the algorithm. Thirdly, an adaptive adjustment search strategy is employed to enhance the ability of exploitation of the algorithm. Finally, the experimental data have verified the effectiveness of the improved whale algorithm in solving the low-carbon FJSP.






2020, 39(5): 729-735.
doi: 10.13433/j.cnki.1003-8728.20190196
Abstract:
An original tool image usually has complex background texture and high noise, which lead to the poor accuracy of wear region segmentation. Therefore, an improved watershed algorithm based on morphological component analysis (MCA) is proposed to extract the tool wear region and estimate its area. Firstly, the morphological differences of the components of the tool wear image are analyzed. Then, the method for selecting the corresponding dictionary of each component is studied and used to decompose the original tool image into the target tool image, background image and noise. Finally, the watershed algorithm is used to extract the wear region of the target tool image and to estimate its area. Milling wear images are used as samples to perform a number of validations of the algorithm. The validation results show that the detection error of the traditional watershed algorithm is about 80%, while the detection error of our algorithm is less than 5%, so it is concluded that our algorithm can segment wear regions more accurately.
An original tool image usually has complex background texture and high noise, which lead to the poor accuracy of wear region segmentation. Therefore, an improved watershed algorithm based on morphological component analysis (MCA) is proposed to extract the tool wear region and estimate its area. Firstly, the morphological differences of the components of the tool wear image are analyzed. Then, the method for selecting the corresponding dictionary of each component is studied and used to decompose the original tool image into the target tool image, background image and noise. Finally, the watershed algorithm is used to extract the wear region of the target tool image and to estimate its area. Milling wear images are used as samples to perform a number of validations of the algorithm. The validation results show that the detection error of the traditional watershed algorithm is about 80%, while the detection error of our algorithm is less than 5%, so it is concluded that our algorithm can segment wear regions more accurately.





2020, 39(5): 736-742.
doi: 10.13433/j.cnki.1003-8728.20190148
Abstract:
3D Hashin failure criterion and material stiffness degradation are compiled via VUMAT subroutine. A finite element model for solving progressive damage cutting force in high-speed milling of CFRP is established via Abaqus. The experimental parameters are used to verify the model. The influence mechanism of the fiber direction on the cutting force, stress and material failure in milling process is analyzed. The results show that the error of cutting force between the CFRP high speed milling experiment and the simulation value is below 5%, which indicates that the reliability of the present model is high. Fiber direction has a significant influence on the cutting force and stress in cutting process. Cutting force and stress follow the rule: 45° > 90° > 0 > 135°. The difference among the cutting force and stress in different angles is mainly caused by the anisotropy of the fiber strength and different types of force acting between the fibers and the tool tip. In addition, the material damage occurs gradually in the cutting process. Fiber angle also has an important impact on the material fracture, the largest fracture scale is of 45° and the smallest is of 135°.
3D Hashin failure criterion and material stiffness degradation are compiled via VUMAT subroutine. A finite element model for solving progressive damage cutting force in high-speed milling of CFRP is established via Abaqus. The experimental parameters are used to verify the model. The influence mechanism of the fiber direction on the cutting force, stress and material failure in milling process is analyzed. The results show that the error of cutting force between the CFRP high speed milling experiment and the simulation value is below 5%, which indicates that the reliability of the present model is high. Fiber direction has a significant influence on the cutting force and stress in cutting process. Cutting force and stress follow the rule: 45° > 90° > 0 > 135°. The difference among the cutting force and stress in different angles is mainly caused by the anisotropy of the fiber strength and different types of force acting between the fibers and the tool tip. In addition, the material damage occurs gradually in the cutting process. Fiber angle also has an important impact on the material fracture, the largest fracture scale is of 45° and the smallest is of 135°.






2020, 39(5): 743-750.
doi: 10.13433/j.cnki.1003-8728.20190201
Abstract:
To solve the standard and semi-standard problems of control point insertion in T-spline surface modeling, this paper proposes a local subdivision algorithm based on uniform T-grid spline surface.Firstwe convert the B-spline surface into a uniform T-grid spline surface based on the definition of the T-spline surface andthen perform the localuniform controlpoint insertion in a uniform T-grid spline surface. In order to meet the requirements for the local feature subdivision of theT-grid splinesurface, we adoptthe form of progressive control point insertion. The mesh for local feature subdivisionfirst performs uniform control point insertion in the full row (orfull column) and then in the local column (or local row). On this basis, the uniform control point insertion is performed again to achieve the purpose of mesh subdivision and subdivision again. The algorithm performs the matrix transformation of the blending functions of the initial grid control points to obtain the blending functions of the control points on the T-gridsurfaceand to generate the final T-gridsurface. Compared with the local subdivision of the T-grid spline surface, this algorithm simplifies the complexity of arbitrary control point insertion. Compared with the local subdivision of the T-grid spline surface, it simplifies the complexity of arbitrary control point insertion. Compared with the local subdivision of the B-spline surface, it reduces redundant control points and simplifies the T-spline surface.
To solve the standard and semi-standard problems of control point insertion in T-spline surface modeling, this paper proposes a local subdivision algorithm based on uniform T-grid spline surface.Firstwe convert the B-spline surface into a uniform T-grid spline surface based on the definition of the T-spline surface andthen perform the localuniform controlpoint insertion in a uniform T-grid spline surface. In order to meet the requirements for the local feature subdivision of theT-grid splinesurface, we adoptthe form of progressive control point insertion. The mesh for local feature subdivisionfirst performs uniform control point insertion in the full row (orfull column) and then in the local column (or local row). On this basis, the uniform control point insertion is performed again to achieve the purpose of mesh subdivision and subdivision again. The algorithm performs the matrix transformation of the blending functions of the initial grid control points to obtain the blending functions of the control points on the T-gridsurfaceand to generate the final T-gridsurface. Compared with the local subdivision of the T-grid spline surface, this algorithm simplifies the complexity of arbitrary control point insertion. Compared with the local subdivision of the T-grid spline surface, it simplifies the complexity of arbitrary control point insertion. Compared with the local subdivision of the B-spline surface, it reduces redundant control points and simplifies the T-spline surface.














2020, 39(5): 751-757.
doi: 10.13433/j.cnki.1003-8728.20190197
Abstract:
In order to solve the metal pipeline corrosion, a classification method of pipeline corrosion defects based on the support vector machine (SVM) and particle swarm optimization (PSO) is proposed. The time domain dimensionless parameters are extracted by using the empirical mode decomposition (EMD) for the pre-processed ultrasonic defect signals as the eigenvectors. SVM defect classification model is established, and PSO algorithm is used to optimize the SVM parameters to improve the accuracy of defect classification. The experimental results show that the recognition rate of the present model for the ultrasonic defect signals under different depths is of 87.5%, which is better than the classification accuracy of BP neural network and RBF neural network with the same experimental samples.
In order to solve the metal pipeline corrosion, a classification method of pipeline corrosion defects based on the support vector machine (SVM) and particle swarm optimization (PSO) is proposed. The time domain dimensionless parameters are extracted by using the empirical mode decomposition (EMD) for the pre-processed ultrasonic defect signals as the eigenvectors. SVM defect classification model is established, and PSO algorithm is used to optimize the SVM parameters to improve the accuracy of defect classification. The experimental results show that the recognition rate of the present model for the ultrasonic defect signals under different depths is of 87.5%, which is better than the classification accuracy of BP neural network and RBF neural network with the same experimental samples.






2020, 39(5): 758-764.
doi: 10.13433/j.cnki.1003-8728.20190193
Abstract:
Aiming at the problem that the supervised learning is commonly adopted in fault diagnosis for rolling bearing, while the labeled data are often difficult to obtain, a fault diagnosis method of rolling bearing combining VMD (Variational Mode Decomposition) with t-SNE (t-distributed Stochastic Neighbor Embedding) is proposed. The original vibration signal of the rolling bearing is decomposed into the several intrinsic mode functions (IMF) by VMD decomposition; the time-frequency characteristics of each IMF is calculated to form high-dimensional fault features, and the secondary feature extraction is performed by t-SNE to form low-dimensional sensitive features; low-dimensional sensitive features are input to the K-means classifier for fault type identification. The method is applied to the fault diagnosis of rolling bearing and compared with VMD + PCA, original time-frequency features + t-SNE. The results show that the VMD + t-SNE method realizes the de-labeling and adaptability of fault diagnosis in the form of unsupervised learning, while improving the accuracy of fault diagnosis.
Aiming at the problem that the supervised learning is commonly adopted in fault diagnosis for rolling bearing, while the labeled data are often difficult to obtain, a fault diagnosis method of rolling bearing combining VMD (Variational Mode Decomposition) with t-SNE (t-distributed Stochastic Neighbor Embedding) is proposed. The original vibration signal of the rolling bearing is decomposed into the several intrinsic mode functions (IMF) by VMD decomposition; the time-frequency characteristics of each IMF is calculated to form high-dimensional fault features, and the secondary feature extraction is performed by t-SNE to form low-dimensional sensitive features; low-dimensional sensitive features are input to the K-means classifier for fault type identification. The method is applied to the fault diagnosis of rolling bearing and compared with VMD + PCA, original time-frequency features + t-SNE. The results show that the VMD + t-SNE method realizes the de-labeling and adaptability of fault diagnosis in the form of unsupervised learning, while improving the accuracy of fault diagnosis.








2020, 39(5): 765-772.
doi: 10.13433/j.cnki.1003-8728.20190195
Abstract:
Aiming at the uncertainty of wall obstacles, the wall climbing robot obstacle detection system based on the binocular vision is designed. Firstly, a binocular parallel vision system is built to calibrate the camera according to in terms of the binocular vision theory, and the camera calibration parameters is obtained. Then, the binocular images are corrected with the calibration parameters and the non-coplanar image distortion is solved with the epipolar constraints. Then the parallax is obtained with the block search model and similarity function to ensure the rapidity and robustness of parallax acquisition. Finally, an obstacle detection algorithm is proposed, in which the wall detection model is established to constrain the detection range, the area threshold is introduced to filter the interference and extract the obstacles. An obstacle location algorithm is proposed, which locates the obstacle in three aspects: width, depth and offset. At the same time, the parallax loss problem in the center of the obstacle is solved with the linear interpolation. The experimental results show that on the basis of the real-time performance, the system can effectively detect obstacles and the accurate extraction rate can reach 95.9% and the positioning error is 4.91%. It meets the requirements of wall-climbing robot detection.
Aiming at the uncertainty of wall obstacles, the wall climbing robot obstacle detection system based on the binocular vision is designed. Firstly, a binocular parallel vision system is built to calibrate the camera according to in terms of the binocular vision theory, and the camera calibration parameters is obtained. Then, the binocular images are corrected with the calibration parameters and the non-coplanar image distortion is solved with the epipolar constraints. Then the parallax is obtained with the block search model and similarity function to ensure the rapidity and robustness of parallax acquisition. Finally, an obstacle detection algorithm is proposed, in which the wall detection model is established to constrain the detection range, the area threshold is introduced to filter the interference and extract the obstacles. An obstacle location algorithm is proposed, which locates the obstacle in three aspects: width, depth and offset. At the same time, the parallax loss problem in the center of the obstacle is solved with the linear interpolation. The experimental results show that on the basis of the real-time performance, the system can effectively detect obstacles and the accurate extraction rate can reach 95.9% and the positioning error is 4.91%. It meets the requirements of wall-climbing robot detection.












2020, 39(5): 773-779.
doi: 10.13433/j.cnki.1003-8728.20190189
Abstract:
Accurate identification of the severity of misalignment degree is an important way to ensure the safe and stable operation of the aero-engine dual-rotor system. Because the misalignment state information often is weak, the existing methods are difficult to identify it accurately. For the above problems, this paper proposes a dual rotor misalignment degree recognition method based on variational mode decomposition and deep confidence network. The vibration acceleration signals in three misaligned degree cases are collected. Firstly, the vibration signal is decomposed by the variational mode decomposition, then the modal function is analyzed. The decomposition layer of VMD is determined according to the mutual information theory, and the modal signal is reconstructed, as a feature input vector, which is used for deep belief network classification model training. Compared with the recognition rates of VMD+BP, VMD+SVM and original signal+DBN model, the simulation results show that the proposed VMD+DBN model improves the recognition accuracy of the dual rotor misalignment degree and verifies the effectiveness of the proposed method.
Accurate identification of the severity of misalignment degree is an important way to ensure the safe and stable operation of the aero-engine dual-rotor system. Because the misalignment state information often is weak, the existing methods are difficult to identify it accurately. For the above problems, this paper proposes a dual rotor misalignment degree recognition method based on variational mode decomposition and deep confidence network. The vibration acceleration signals in three misaligned degree cases are collected. Firstly, the vibration signal is decomposed by the variational mode decomposition, then the modal function is analyzed. The decomposition layer of VMD is determined according to the mutual information theory, and the modal signal is reconstructed, as a feature input vector, which is used for deep belief network classification model training. Compared with the recognition rates of VMD+BP, VMD+SVM and original signal+DBN model, the simulation results show that the proposed VMD+DBN model improves the recognition accuracy of the dual rotor misalignment degree and verifies the effectiveness of the proposed method.







2020, 39(5): 780-785.
doi: 10.13433/j.cnki.1003-8728.20200051
Abstract:
For the situation assessment in soccer robots game, an intuitionistic fuzzy algorithm of the situation assessment for competition field is proposed. Firstly, an intuitionistic fussy comprehensive evaluation model is established. Then, the index system needed for situation assessment is established, and the approaches to effectiveness measures for evaluating goals and normalization of their values are given. Finally, Delphi and Analytic Hierarchy Process are used to determine the weight vector of the evaluation index. The experimental results shows that the present assessment method has a small computational complexity. It can be used to give an effective comprehensive evaluation in game assessment with a higher dependability.
For the situation assessment in soccer robots game, an intuitionistic fuzzy algorithm of the situation assessment for competition field is proposed. Firstly, an intuitionistic fussy comprehensive evaluation model is established. Then, the index system needed for situation assessment is established, and the approaches to effectiveness measures for evaluating goals and normalization of their values are given. Finally, Delphi and Analytic Hierarchy Process are used to determine the weight vector of the evaluation index. The experimental results shows that the present assessment method has a small computational complexity. It can be used to give an effective comprehensive evaluation in game assessment with a higher dependability.


2020, 39(5): 786-794.
doi: 10.13433/j.cnki.1003-8728.20190188
Abstract:
It is known that the piezoelectric vibrator can only ensure the output level of electric energy when it is in resonance state. However, the vibration source frequency in the environment is much lower than the natural frequency of ordinary piezoelectric vibrators. For the two periodic structure cantilever beams, their models are established. The natural frequency is solved with the numerical simulation software and finite element software respectively. The results show that the natural frequency of the zigzag cantilever beam is more sensitive to the increase in the number of beam segments. So the natural frequencies of zigzag cantilever beams are lower when the number of beam segments is higher, and the low frequency energy capture performance is superior to spiral cantilever beams. However, the span between the natural frequencies of each mode are large and uneven, fewer modal orders can match the source frequency in the environment, its broad band energy capture ability is not as good as that of a spiral cantilever beam.
It is known that the piezoelectric vibrator can only ensure the output level of electric energy when it is in resonance state. However, the vibration source frequency in the environment is much lower than the natural frequency of ordinary piezoelectric vibrators. For the two periodic structure cantilever beams, their models are established. The natural frequency is solved with the numerical simulation software and finite element software respectively. The results show that the natural frequency of the zigzag cantilever beam is more sensitive to the increase in the number of beam segments. So the natural frequencies of zigzag cantilever beams are lower when the number of beam segments is higher, and the low frequency energy capture performance is superior to spiral cantilever beams. However, the span between the natural frequencies of each mode are large and uneven, fewer modal orders can match the source frequency in the environment, its broad band energy capture ability is not as good as that of a spiral cantilever beam.















2020, 39(5): 795-803.
doi: 10.13433/j.cnki.1003-8728.20190194
Abstract:
In order to prevent the stress relaxation caused by the high temperature and high pressure environment in long time, the traditional stress relaxation theory and Arrhenius theory are combined to establish the stress relaxation of the canted coil spring. Through the stress relaxation acceleration test under different loads and temperatures, the variation law of the spring stress relaxation model parameters is explored to predict the relaxation characteristics and service life of the canted coil ring spring under the actual servicing environment. Through the finite element simulation analysis of the single-turn spring by the workbench, the load relaxation amount and the internal equivalent stress relaxation rate of the spring can be not only obtained, the displacement change and the creep variable after the stress relaxation of the spring can be but also seen. By changing the structural parameters of the spring, the workbench is used to analyze the stress relaxation rate of the single-turn spring under different structural parameters, and the relationship between the structural parameters and the stress relaxation rate is explored, which provides a theoretical basis for improving the spring life.
In order to prevent the stress relaxation caused by the high temperature and high pressure environment in long time, the traditional stress relaxation theory and Arrhenius theory are combined to establish the stress relaxation of the canted coil spring. Through the stress relaxation acceleration test under different loads and temperatures, the variation law of the spring stress relaxation model parameters is explored to predict the relaxation characteristics and service life of the canted coil ring spring under the actual servicing environment. Through the finite element simulation analysis of the single-turn spring by the workbench, the load relaxation amount and the internal equivalent stress relaxation rate of the spring can be not only obtained, the displacement change and the creep variable after the stress relaxation of the spring can be but also seen. By changing the structural parameters of the spring, the workbench is used to analyze the stress relaxation rate of the single-turn spring under different structural parameters, and the relationship between the structural parameters and the stress relaxation rate is explored, which provides a theoretical basis for improving the spring life.



















2020, 39(5): 804-809.
doi: 10.13433/j.cnki.1003-8728.20190202
Abstract:
Graphite to add in 316L stainless steel change the carbon content in the selective laser melting (SLM). The influence of the carbon content on the microstructure and mechanical properties of 316L stainless steel was investigated. The results showed that the hardness of 316L stainless steel increased the increasing of carbon content, and the tensile strength decreased after increase due to the carbides enhance the tensile properties of stainless steel. Through the observation of the fracture morphology, it is found that the fractures at low and medium carbon content are ductile, while the fracture at high carbon content is brittle. With the increase of microcracks, the defects gradually play a leading role, which seriously affects the tensile properties.
Graphite to add in 316L stainless steel change the carbon content in the selective laser melting (SLM). The influence of the carbon content on the microstructure and mechanical properties of 316L stainless steel was investigated. The results showed that the hardness of 316L stainless steel increased the increasing of carbon content, and the tensile strength decreased after increase due to the carbides enhance the tensile properties of stainless steel. Through the observation of the fracture morphology, it is found that the fractures at low and medium carbon content are ductile, while the fracture at high carbon content is brittle. With the increase of microcracks, the defects gradually play a leading role, which seriously affects the tensile properties.







2020, 39(5): 810-814.
doi: 10.13433/j.cnki.1003-8728.20190209
Abstract:
The process of engine blade impacted by foreign objects is simulated by a fan blade foreign object damage (FOD) test platform. The non-contact tip vibration measurement method based on tip timing principle is used to obtain blade tip vibration signal. By processing the original vibration signal based on the short-term energy method, the reference short-term energy values of tip vibration corresponding to different steady speed states of the fan can be obtained. After repeated tests and data statistics, the threshold coefficient is given, and the detection threshold value of foreign objects impacting fan blades is obtained according to the principle of on-line detection. The vibration data of blades with different sizes and masses impacting at a given fan speed are analyzed, and the corresponding short-term energy distribution is obtained, and then the time and number of impacts are estimated accurately.
The process of engine blade impacted by foreign objects is simulated by a fan blade foreign object damage (FOD) test platform. The non-contact tip vibration measurement method based on tip timing principle is used to obtain blade tip vibration signal. By processing the original vibration signal based on the short-term energy method, the reference short-term energy values of tip vibration corresponding to different steady speed states of the fan can be obtained. After repeated tests and data statistics, the threshold coefficient is given, and the detection threshold value of foreign objects impacting fan blades is obtained according to the principle of on-line detection. The vibration data of blades with different sizes and masses impacting at a given fan speed are analyzed, and the corresponding short-term energy distribution is obtained, and then the time and number of impacts are estimated accurately.








2020, 39(5): 815-820.
doi: 10.13433/j.cnki.1003-8728.20200048
Abstract:
Robot automatic drilling system plays a key role during airplane assembling process. In order to meet the design and application requirements, the precision of the system needs to be calibrated before utilized. The calibration cannot be finished by only drilling a single hole since the precision in each dimension cannot be obtained. In this study, the calibration methods of position compensation, hole position, normal, hole diameter and dimple precision are presented respectively. These calibration methods are verified by the drilling system that has already been used in actual production. It is found the provided methods are capable of fast calibration.
Robot automatic drilling system plays a key role during airplane assembling process. In order to meet the design and application requirements, the precision of the system needs to be calibrated before utilized. The calibration cannot be finished by only drilling a single hole since the precision in each dimension cannot be obtained. In this study, the calibration methods of position compensation, hole position, normal, hole diameter and dimple precision are presented respectively. These calibration methods are verified by the drilling system that has already been used in actual production. It is found the provided methods are capable of fast calibration.










