Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2024 Vol. 43, No. 5
Display Method:
2024, 43(5): 737-749.
doi: 10.13433/j.cnki.1003-8728.20220285
 PDF 5794KB
PDF 5794KB
Abstract:
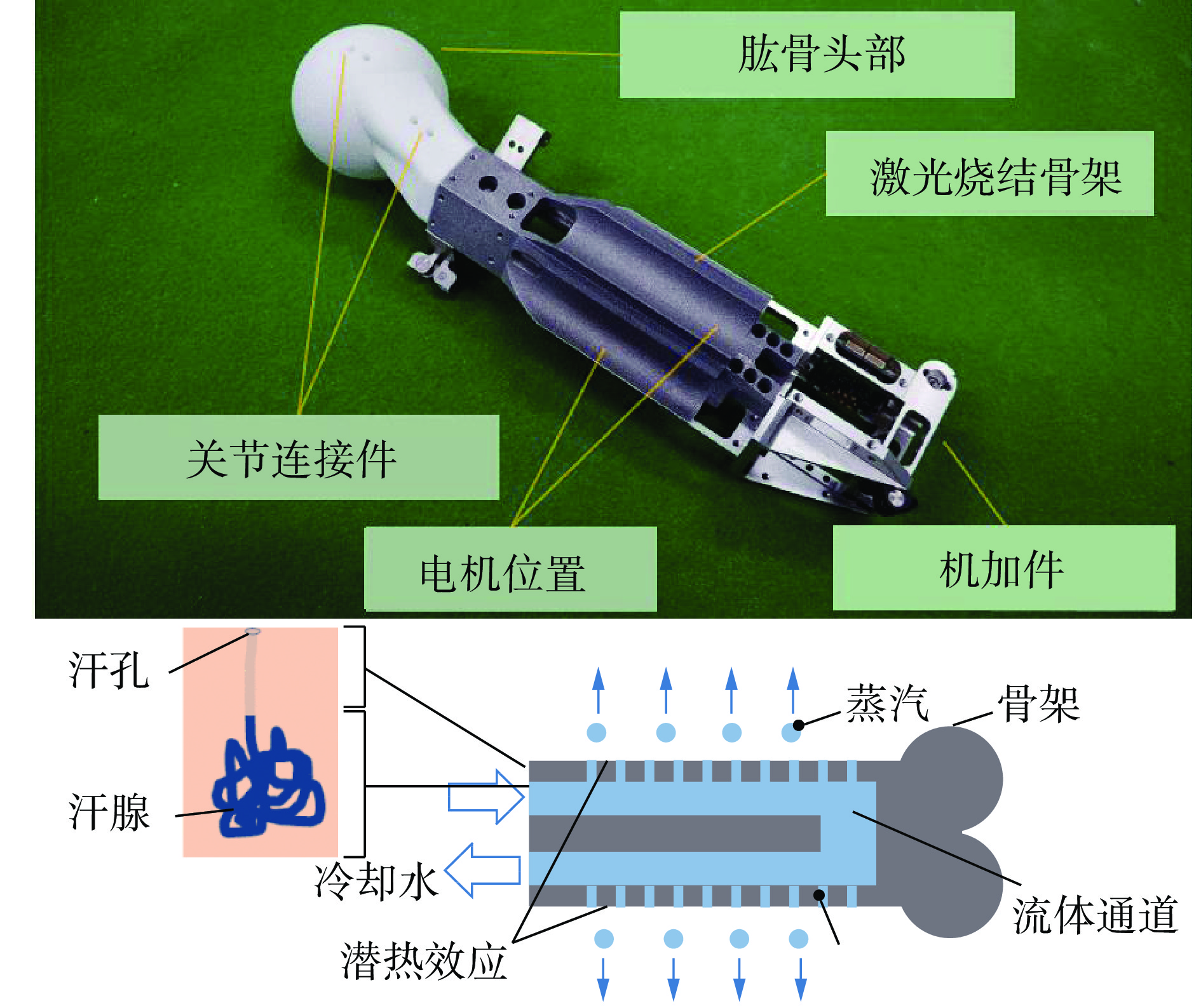
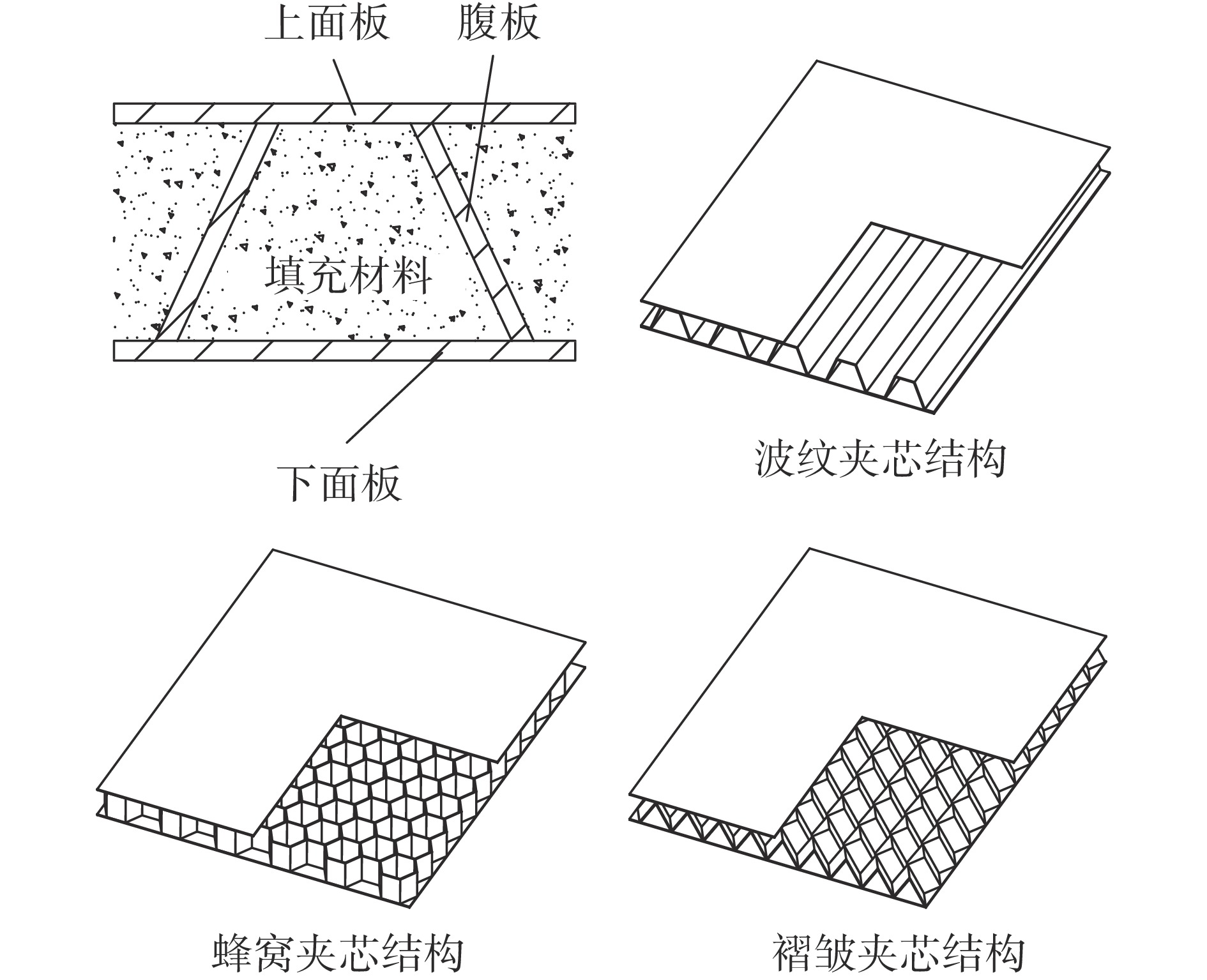
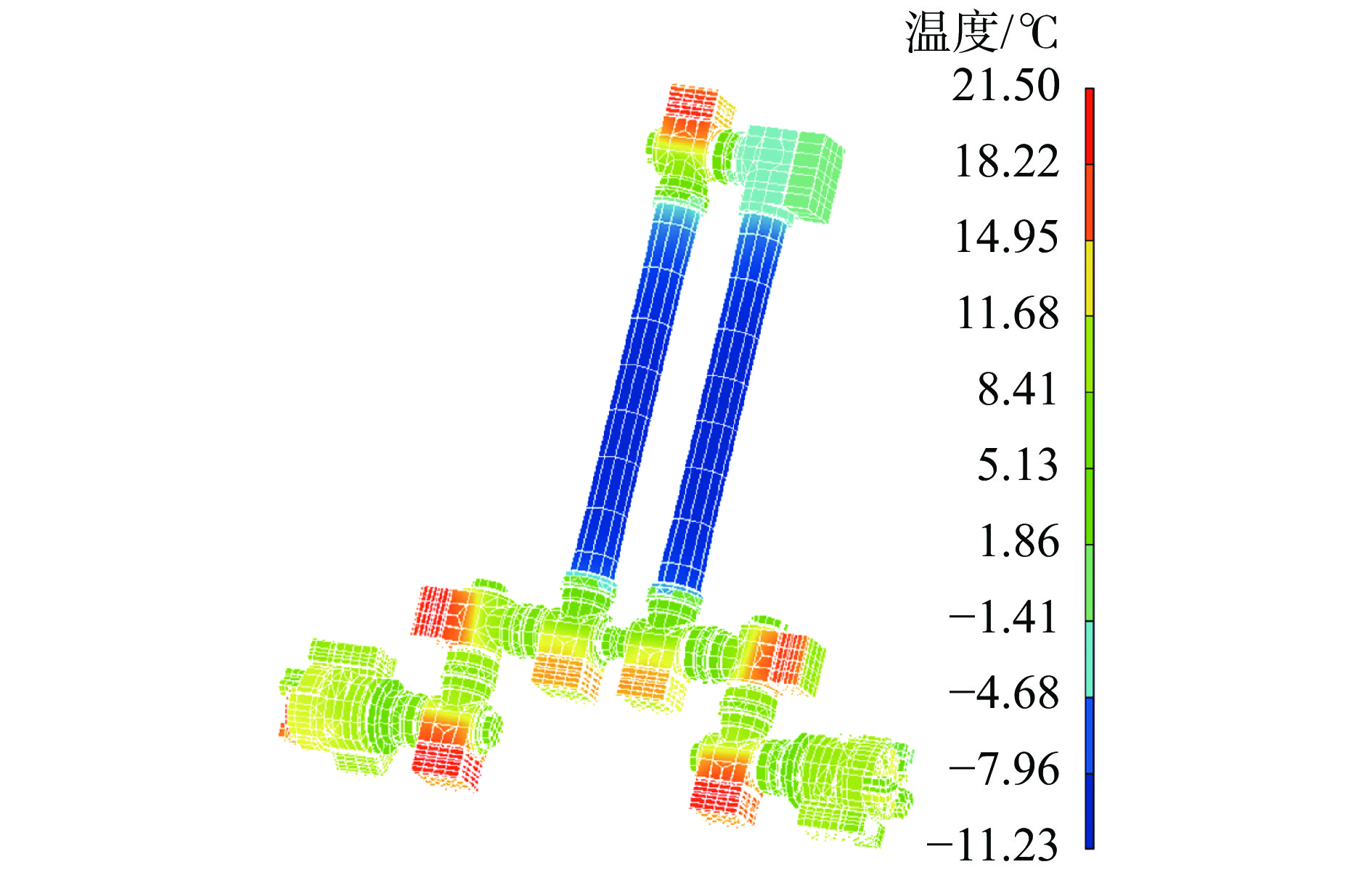
Currently, robots are being adopted widely, instead of human beings, to carry on the jobs under the dangerous circumstances. However, applications of the robots with high-temperature conditions are hindered seriously by the development of thermal control techniques. Firstly, the main thermal sensitive devices of robots and the corresponding thermal management researches are introduced. Secondly, the development status of the thermal control techniques for robots in recent years is expounded in detail. Finally, the key issues which should be settled for the thermal protection of robots in high-temperature are discussed and the possible applied technologies are prospected.
Currently, robots are being adopted widely, instead of human beings, to carry on the jobs under the dangerous circumstances. However, applications of the robots with high-temperature conditions are hindered seriously by the development of thermal control techniques. Firstly, the main thermal sensitive devices of robots and the corresponding thermal management researches are introduced. Secondly, the development status of the thermal control techniques for robots in recent years is expounded in detail. Finally, the key issues which should be settled for the thermal protection of robots in high-temperature are discussed and the possible applied technologies are prospected.




2024, 43(5): 750-755.
doi: 10.13433/j.cnki.1003-8728.20220272
Abstract:
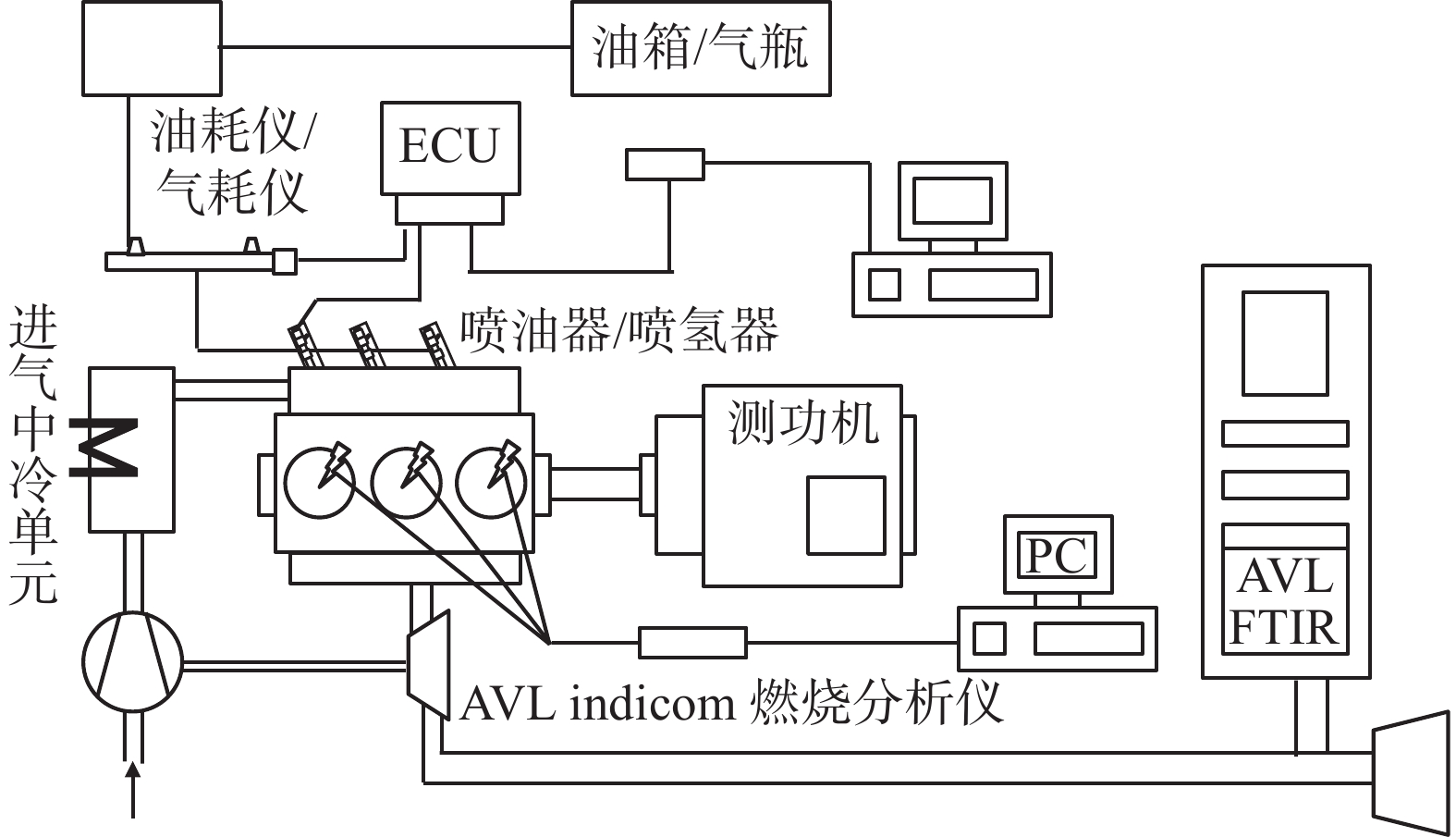
The high-pressure Miller-cycle direct gasoline injection engine was installed with a hydrogen injection engine. The combustion and emission differences between the engine's use of gasoline and hydrogen were experimentally studied. We used an electronic compressor to explore the thermal efficiency of the ultra-rarefied combustion of the hydrogen injection engine in its lean burn mode. The effects of a three-way catalytic (TWC) converter on the conversion efficiency of nitrogen oxide and NH3 were analyzed. The results show that the hydrogen engine is sensitive to engine knock under large load condition. Lean combustion can further improve the thermal efficiency. At the speed of 2 500 r/min, when PBME = 0.8 MPa and the excess air coefficient increases from 1.0 to 3.0, the thermal efficiency increases by 30% and the NOx emission decreases by about 98%. When the load further increases to PBME = 1.1 MPa, the thermal efficiency exceeds 43.0%. The NOx conversion efficiency of the traditional gasoline engine TWC for hydrogen engine is relatively high under rich content condition. A large amount of ammonia may be generated after TWC conversion. When the mixture is further diluted, the amount of NH3 generation decreases significantly.
The high-pressure Miller-cycle direct gasoline injection engine was installed with a hydrogen injection engine. The combustion and emission differences between the engine's use of gasoline and hydrogen were experimentally studied. We used an electronic compressor to explore the thermal efficiency of the ultra-rarefied combustion of the hydrogen injection engine in its lean burn mode. The effects of a three-way catalytic (TWC) converter on the conversion efficiency of nitrogen oxide and NH3 were analyzed. The results show that the hydrogen engine is sensitive to engine knock under large load condition. Lean combustion can further improve the thermal efficiency. At the speed of 2 500 r/min, when PBME = 0.8 MPa and the excess air coefficient increases from 1.0 to 3.0, the thermal efficiency increases by 30% and the NOx emission decreases by about 98%. When the load further increases to PBME = 1.1 MPa, the thermal efficiency exceeds 43.0%. The NOx conversion efficiency of the traditional gasoline engine TWC for hydrogen engine is relatively high under rich content condition. A large amount of ammonia may be generated after TWC conversion. When the mixture is further diluted, the amount of NH3 generation decreases significantly.






2024, 43(5): 756-764.
doi: 10.13433/j.cnki.1003-8728.20220293
Abstract:
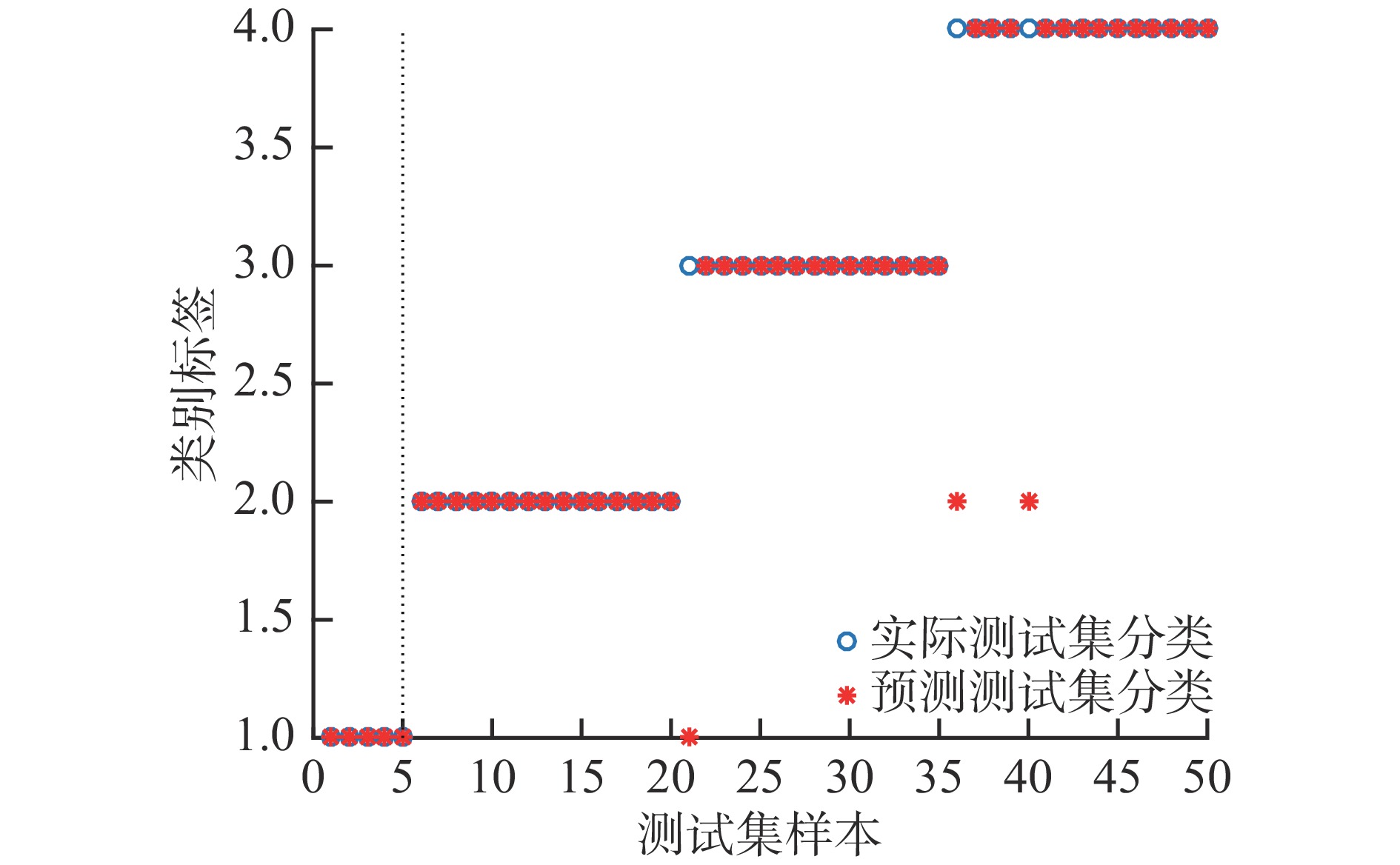
Check valves are widely used in hydraulic systems of construction machinery, agricultural machinery and military vehicles, the leakage is a common fault of check valves. This paper proposes a fault diagnosis method of check valve tiny internal leakage based on multi-source, multi-domain, multi-scale feature extraction and machine learning. First of all, the empirical mode decomposition (EEMD) is performed on the vibration signals and pressure signals of the four types of leakage failures. Secondly, the singular value, form factor, entropy and other methods from time domain, frequency domain and time-frequency domain are used to extract features and construct fault feature vector. Finally, the particle swarm-support vector machine algorithm are adopted to classify the leakage fault patterns. Experimental results show that the method can effectively detect leakage and the pattern recognition accuracy of leakage is over 90%. This paper laid a foundation for the research on the leakage rate prediction of the internal leakage of check valves, which has a good engineering application prospect.
Check valves are widely used in hydraulic systems of construction machinery, agricultural machinery and military vehicles, the leakage is a common fault of check valves. This paper proposes a fault diagnosis method of check valve tiny internal leakage based on multi-source, multi-domain, multi-scale feature extraction and machine learning. First of all, the empirical mode decomposition (EEMD) is performed on the vibration signals and pressure signals of the four types of leakage failures. Secondly, the singular value, form factor, entropy and other methods from time domain, frequency domain and time-frequency domain are used to extract features and construct fault feature vector. Finally, the particle swarm-support vector machine algorithm are adopted to classify the leakage fault patterns. Experimental results show that the method can effectively detect leakage and the pattern recognition accuracy of leakage is over 90%. This paper laid a foundation for the research on the leakage rate prediction of the internal leakage of check valves, which has a good engineering application prospect.












2024, 43(5): 765-772.
doi: 10.13433/j.cnki.1003-8728.20230045
Abstract:
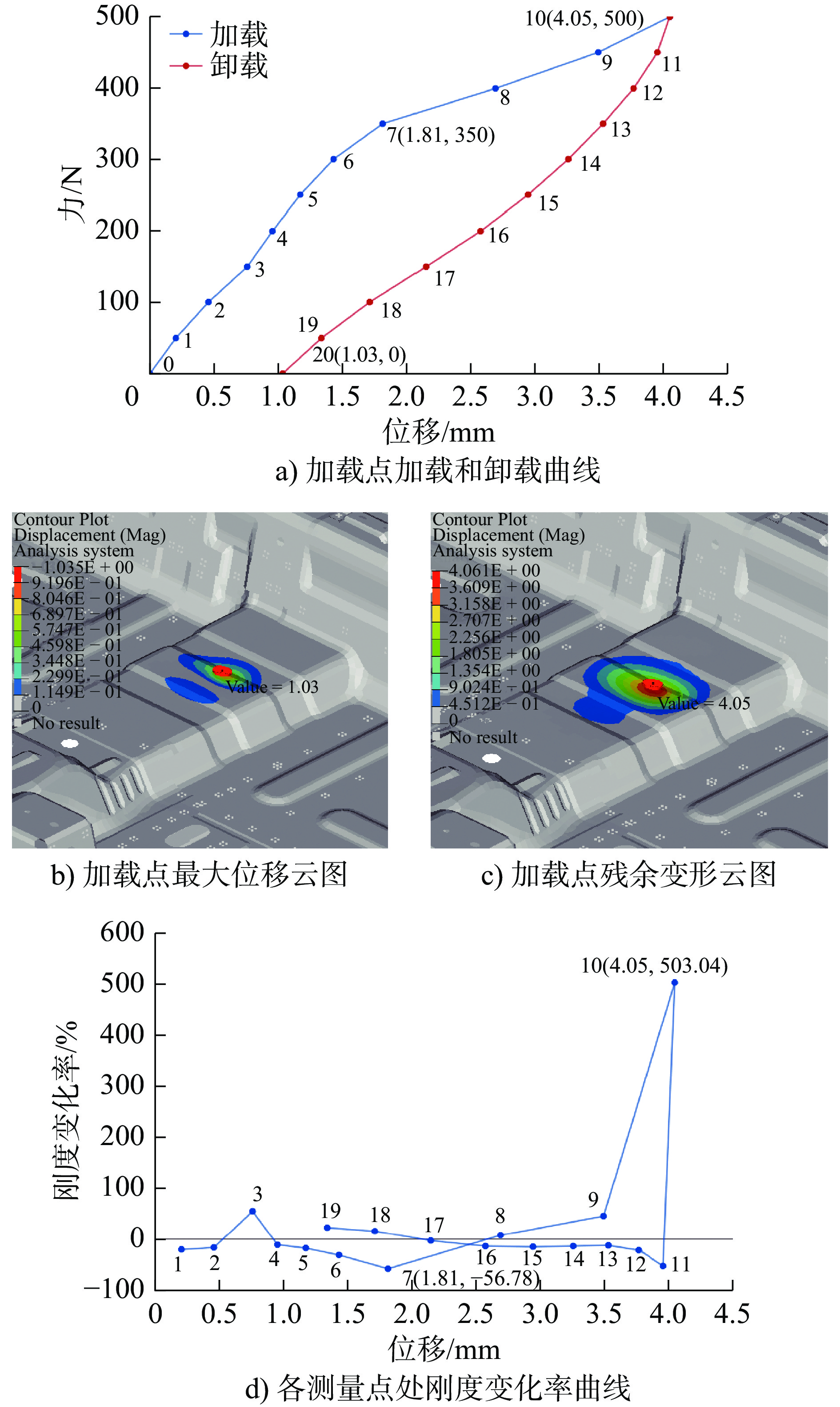
The finite element model for dent performance of aisle floor in white body was established according to the practical problem. The index of dent performance of aisle floor was obtained according to the calculated result. The results of experiment and finite element analysis method were compared. The comparison results show that they have good consistency. The method of finite element analysis is effective. In order to obtain the optimized parameter combination for dent performance of aisle floor, orthogonal test was established. The research factors were depth of transverse stiffener, material designation and thickness. Each factor was designed in three levels. An orthogonal table L9(34) was built and 9 groups of finite element analysis model were conducted. The analysis results were processed by the variance and range analysis, and the influence of each factor and level for each dent performance index of aisle floor were gained. The optimized parameter combinations are confirmed finally. Design references for dent performance of aisle floor are provided, and it has significance in application.
The finite element model for dent performance of aisle floor in white body was established according to the practical problem. The index of dent performance of aisle floor was obtained according to the calculated result. The results of experiment and finite element analysis method were compared. The comparison results show that they have good consistency. The method of finite element analysis is effective. In order to obtain the optimized parameter combination for dent performance of aisle floor, orthogonal test was established. The research factors were depth of transverse stiffener, material designation and thickness. Each factor was designed in three levels. An orthogonal table L9(34) was built and 9 groups of finite element analysis model were conducted. The analysis results were processed by the variance and range analysis, and the influence of each factor and level for each dent performance index of aisle floor were gained. The optimized parameter combinations are confirmed finally. Design references for dent performance of aisle floor are provided, and it has significance in application.





2024, 43(5): 773-780.
doi: 10.13433/j.cnki.1003-8728.20230036
Abstract:
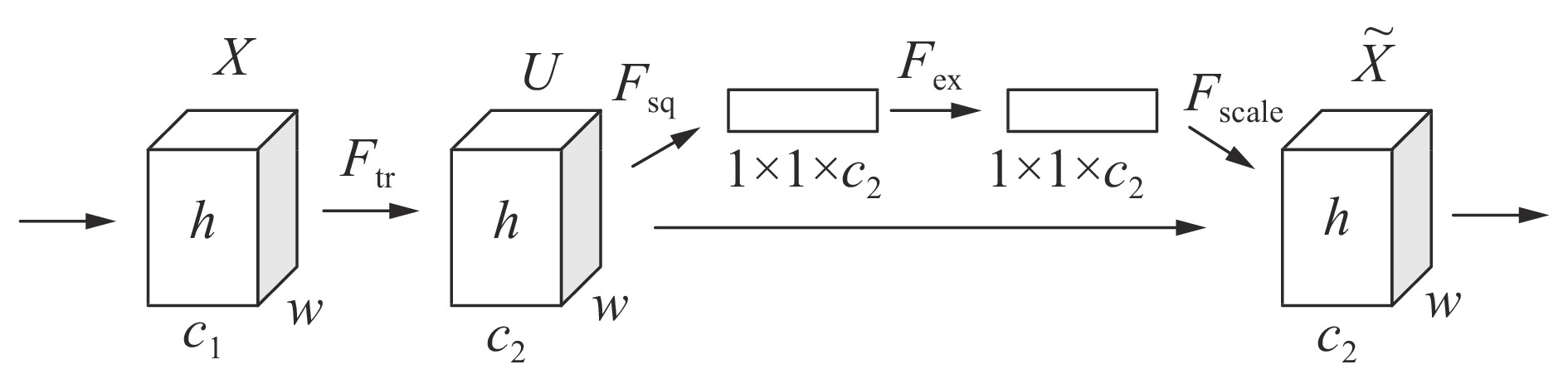
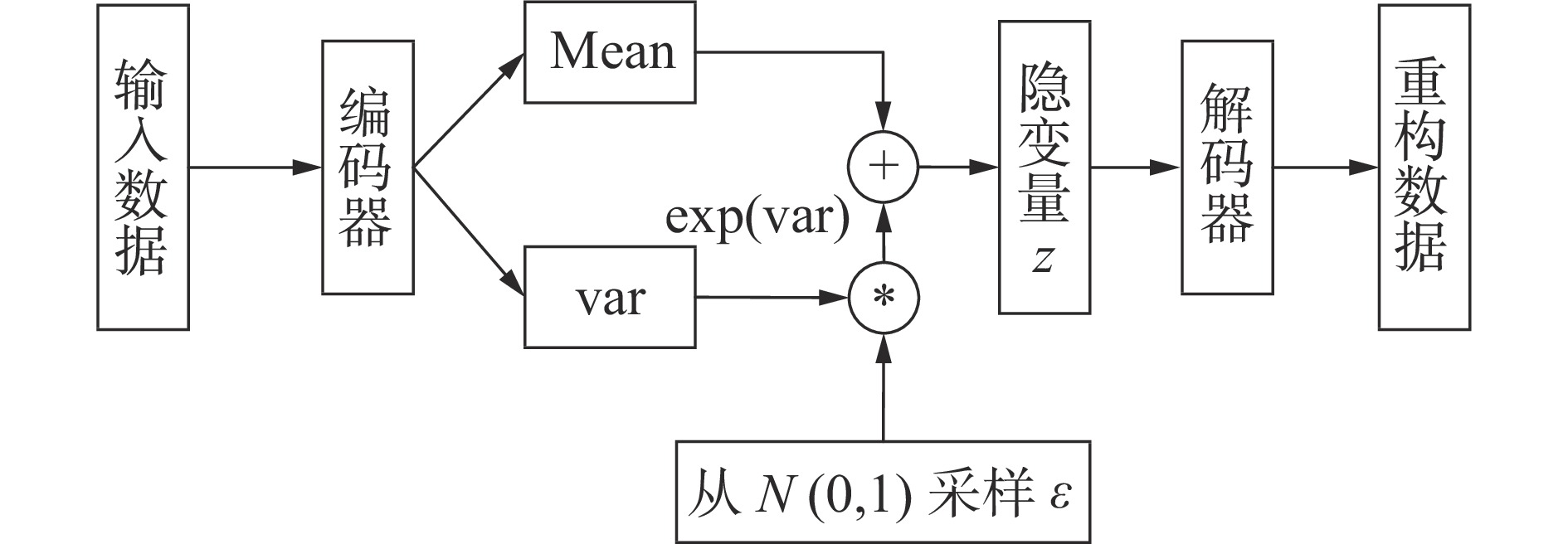
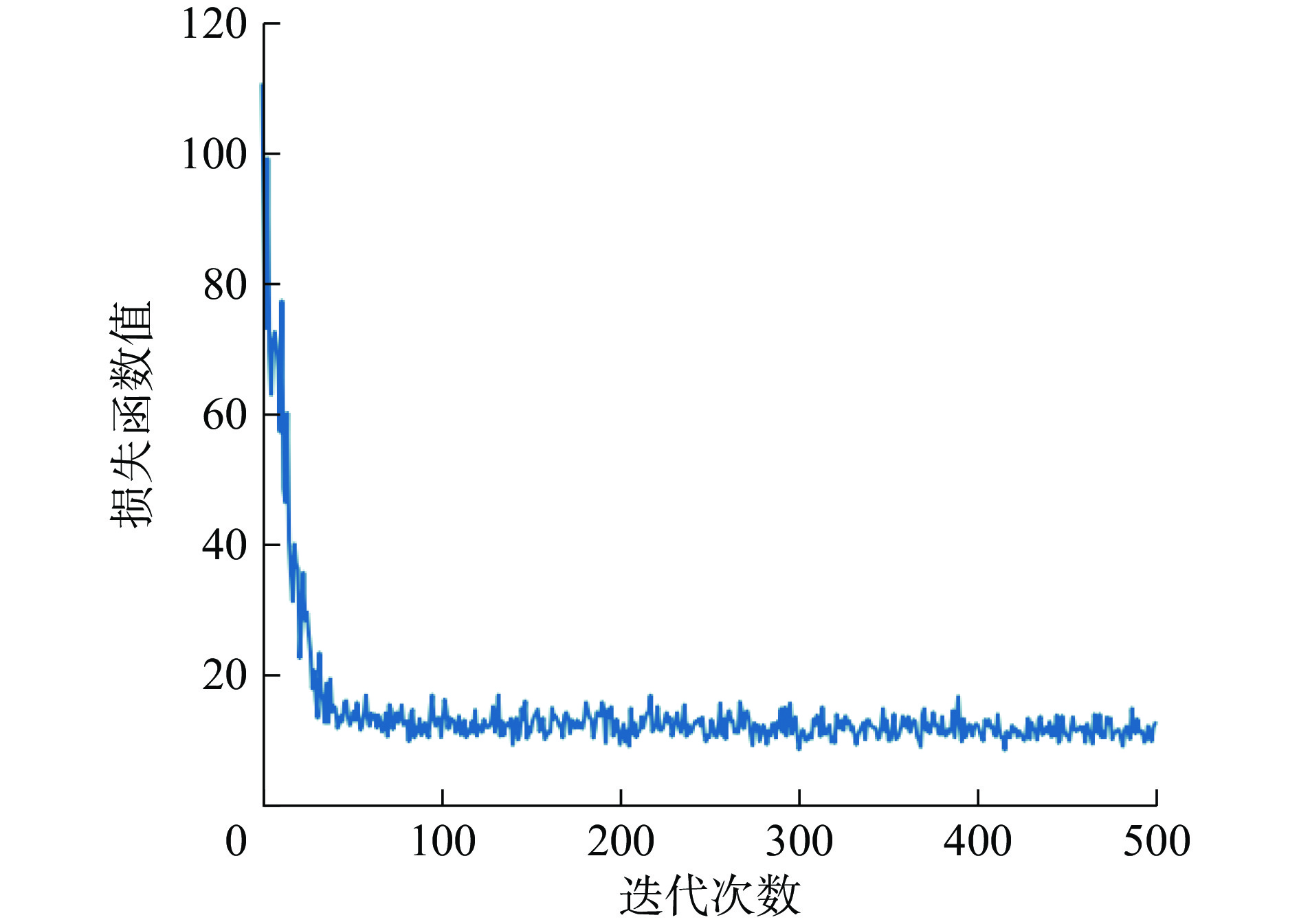
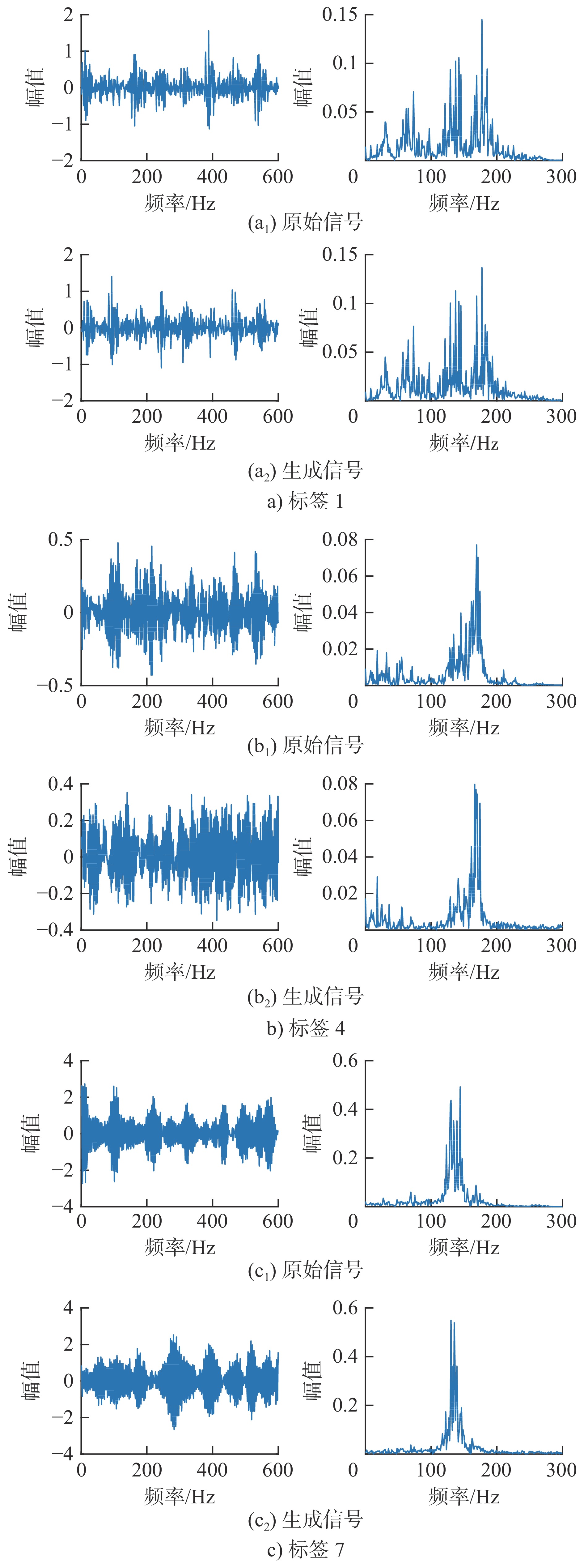
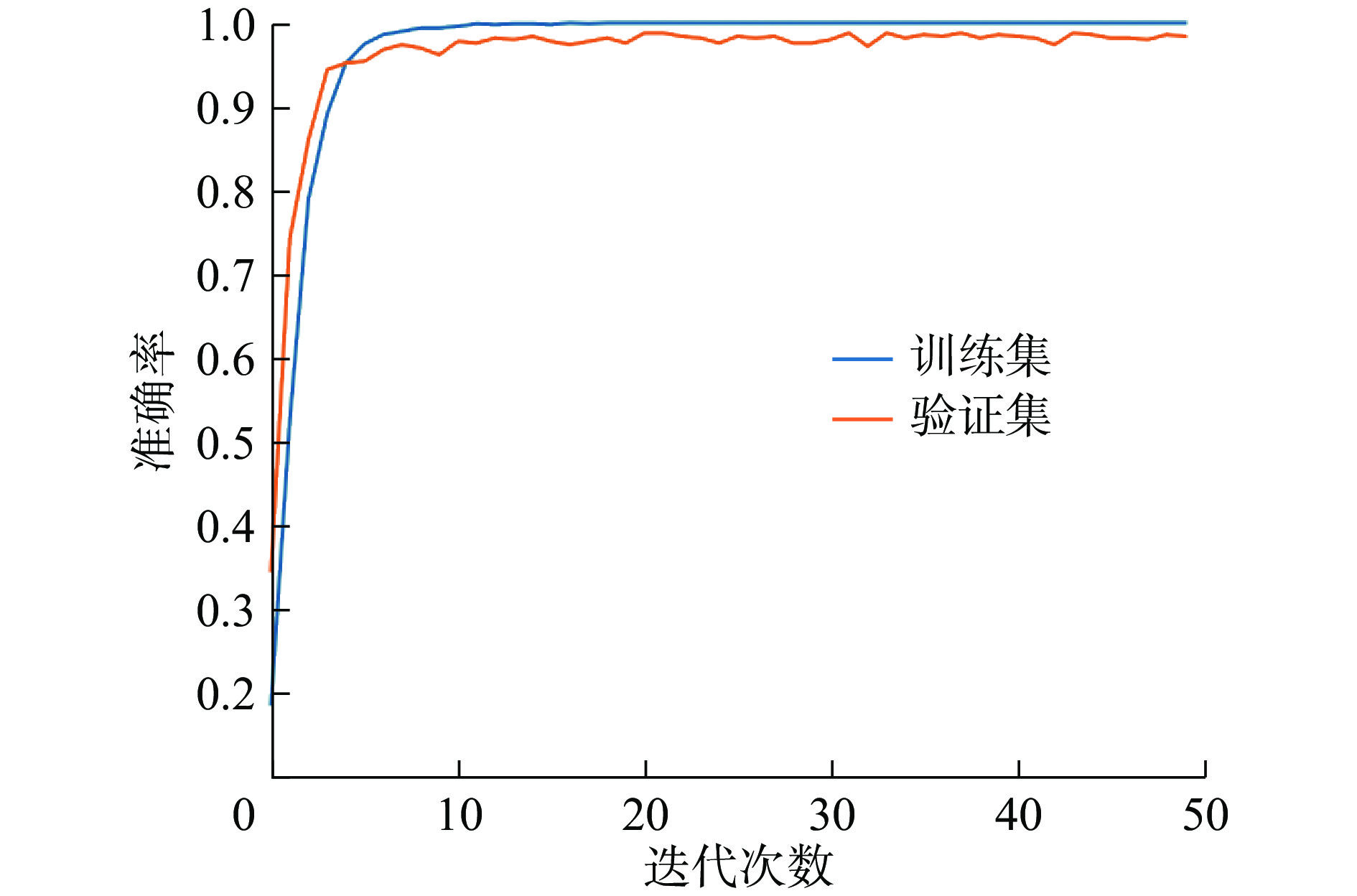
Aiming at the problem of low diagnostic accuracy caused by the small number of fault samples in bearing fault diagnosis, a new bearing fault diagnosis method based on attention mechanism variation autoencoder (SE-VAE) and multi-scale one-dimensional convolutional neural network (M1DCNN) was proposed. Firstly, the training set of bearing data set is input into SE-VAE for training, generated samples with similar distribution to the training samples are obtained and added to the training set to increase the number of samples in the training set. Then, the extended training set is input into M1DCNN for training, and finally the trained model is applied to the test set to output the fault diagnosis results. Experimental results show that the proposed method can achieve better fault diagnosis accuracy on small sample bearing fault data sets with different loads.
Aiming at the problem of low diagnostic accuracy caused by the small number of fault samples in bearing fault diagnosis, a new bearing fault diagnosis method based on attention mechanism variation autoencoder (SE-VAE) and multi-scale one-dimensional convolutional neural network (M1DCNN) was proposed. Firstly, the training set of bearing data set is input into SE-VAE for training, generated samples with similar distribution to the training samples are obtained and added to the training set to increase the number of samples in the training set. Then, the extended training set is input into M1DCNN for training, and finally the trained model is applied to the test set to output the fault diagnosis results. Experimental results show that the proposed method can achieve better fault diagnosis accuracy on small sample bearing fault data sets with different loads.





2024, 43(5): 781-789.
doi: 10.13433/j.cnki.1003-8728.20220304
Abstract:
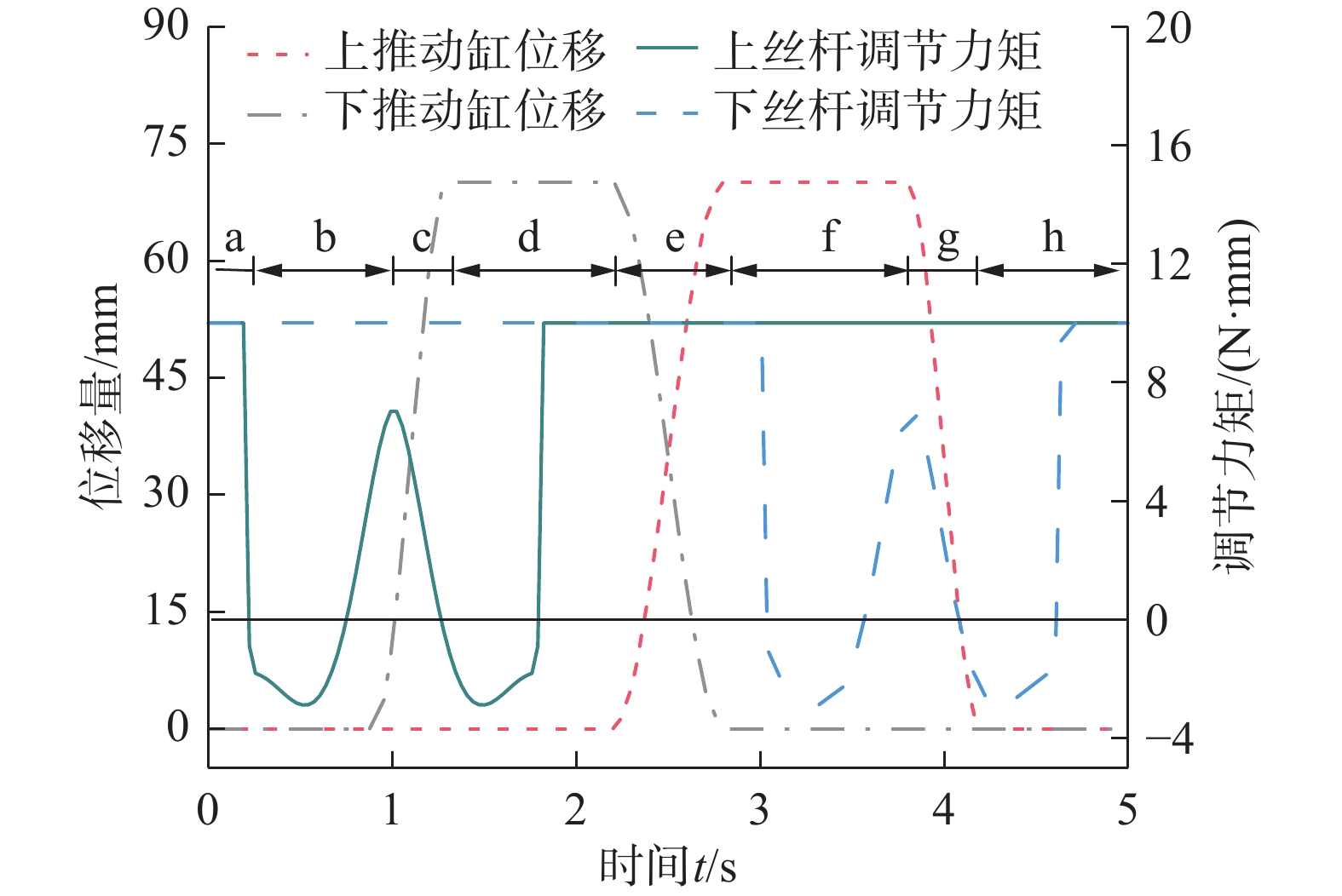
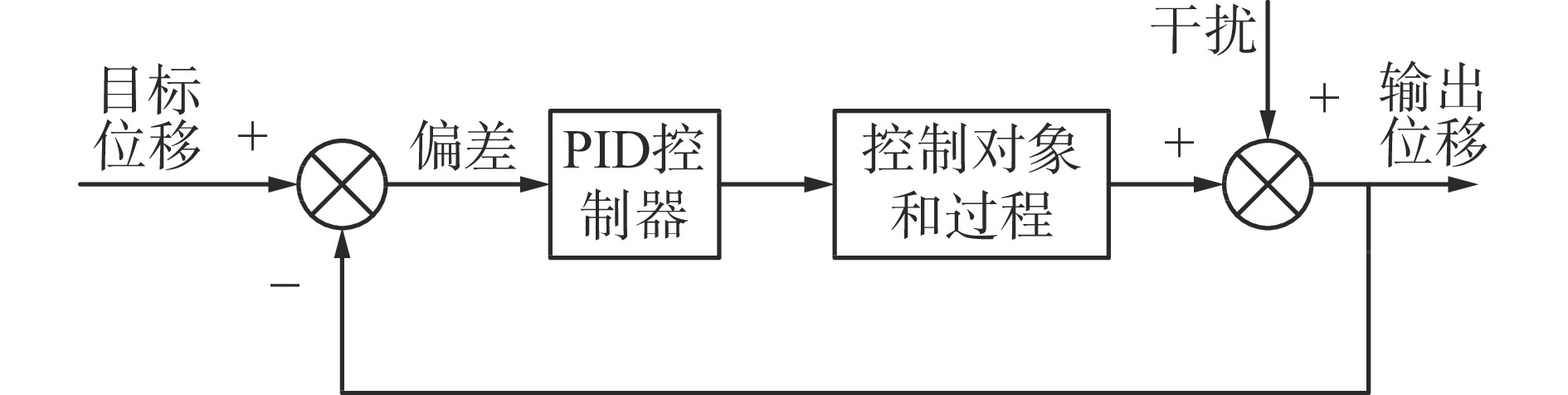
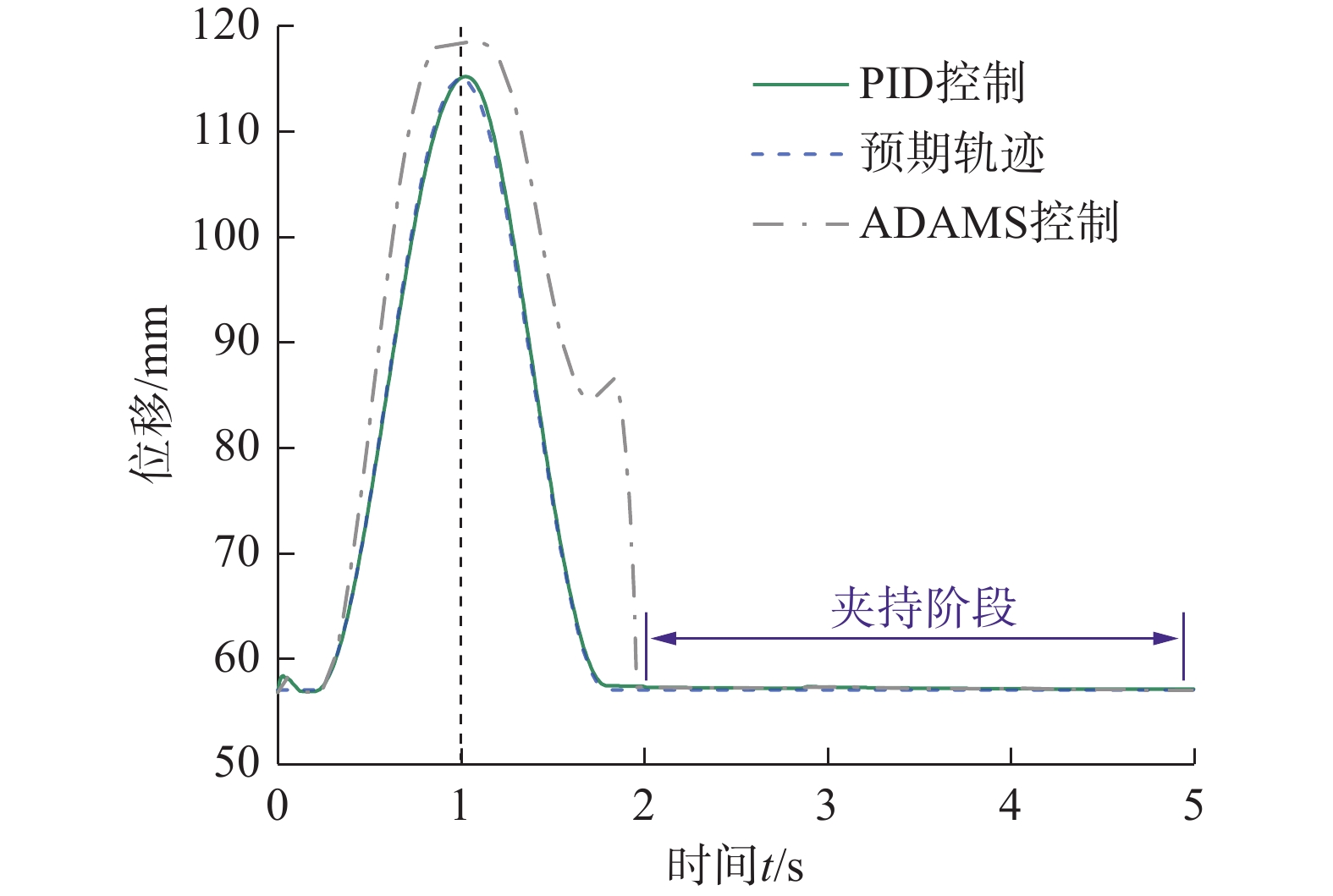
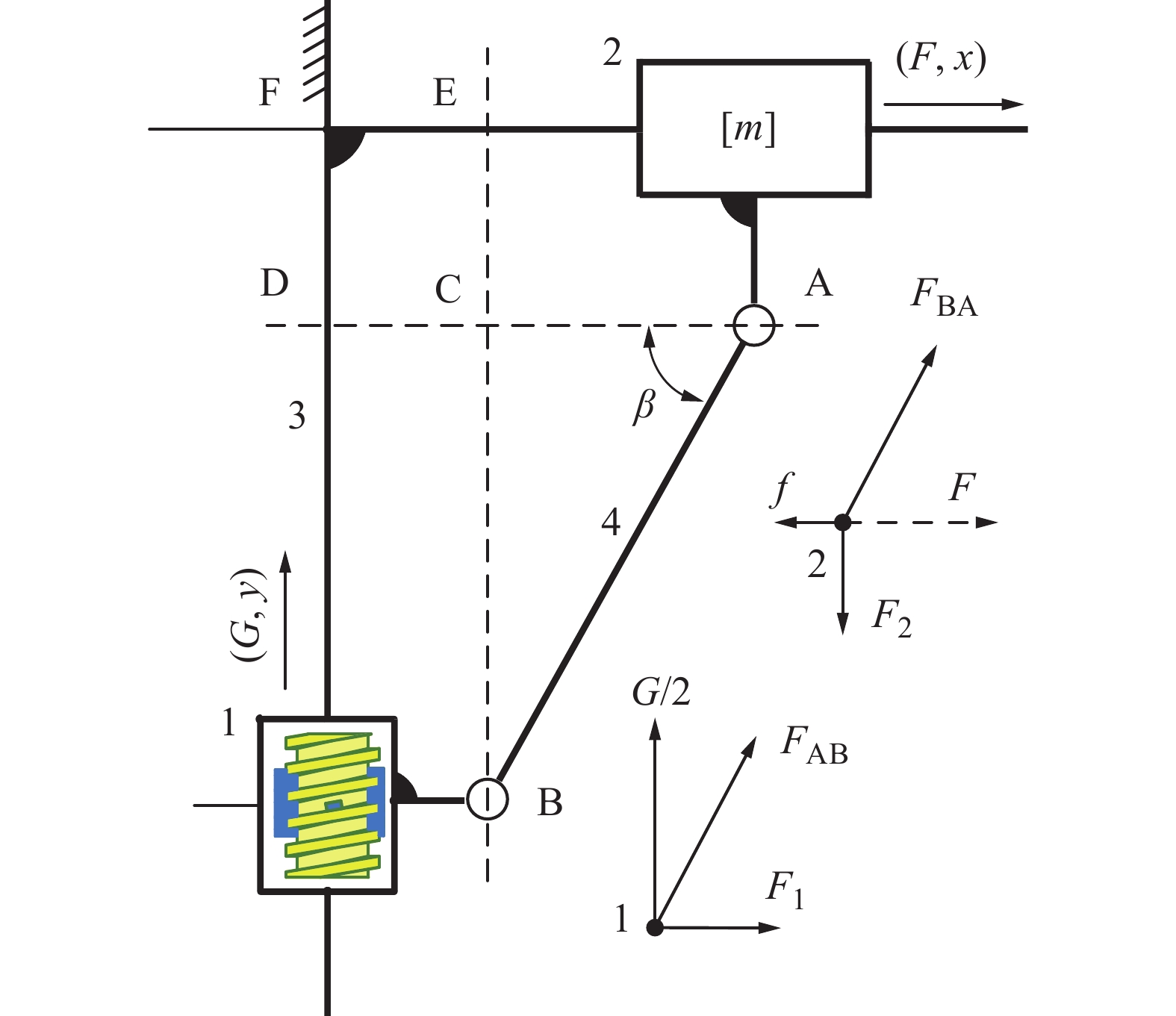
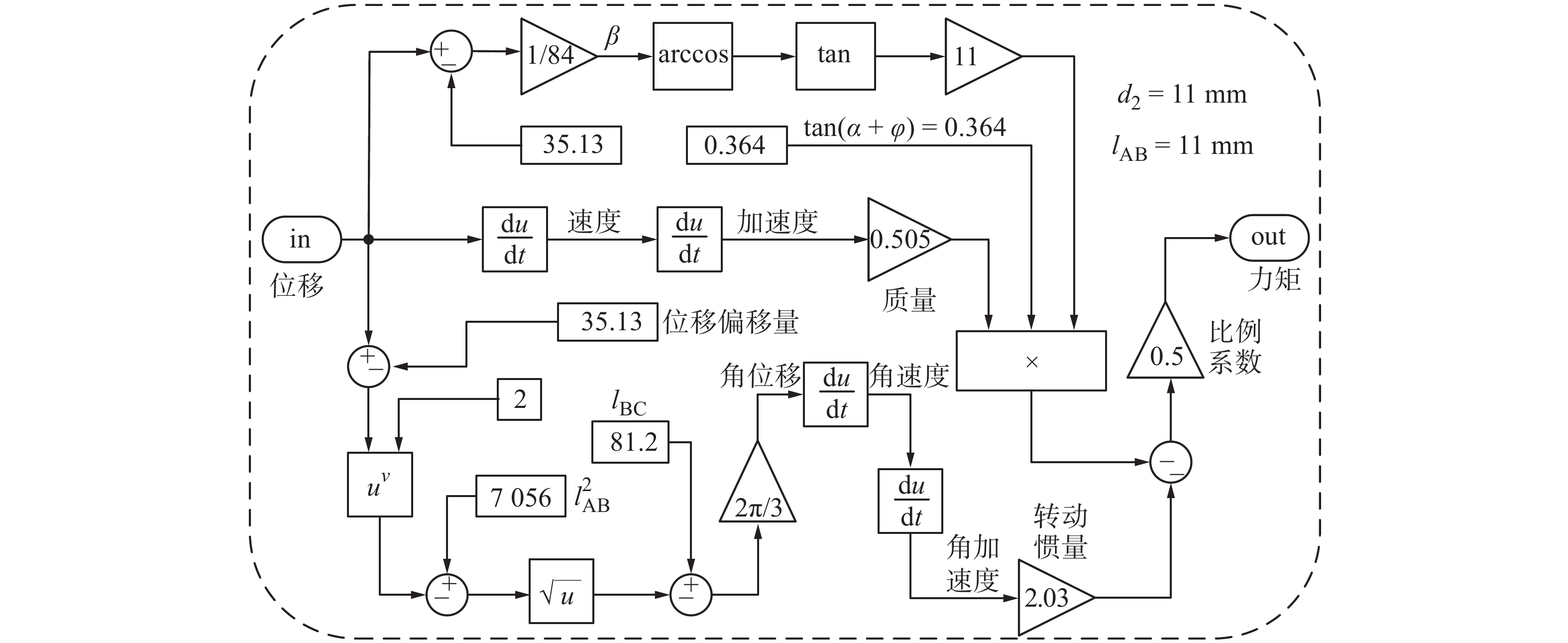
In order to improve the driving performance of pole climbing robot, a compound control method of feedforward compensation and PID regulation was proposed to optimize the fluctuation of driving torque, combining with the virtual prototype and dynamic simulation of the robot. A multi-body dynamic model for robot via ADAMS was established to simulate the climbing movement, and a PID control system via Simulink was built to adjust the displacement. Then, a compound control system with feedforward compensation was established based on the "torque-displacement" mathematical model. The results of co-simulation show that the displacement control accuracy of robot is improved with the increasing of fluctuation of driving torque based on single PID control. Besides the fluctuation of driving torque is reduced based on the compound control, and the adjustment amplitude of the driving torque is decreased about 24.7% comparing with PID control, which improves the output energy efficiency of the driving system of the robot.
In order to improve the driving performance of pole climbing robot, a compound control method of feedforward compensation and PID regulation was proposed to optimize the fluctuation of driving torque, combining with the virtual prototype and dynamic simulation of the robot. A multi-body dynamic model for robot via ADAMS was established to simulate the climbing movement, and a PID control system via Simulink was built to adjust the displacement. Then, a compound control system with feedforward compensation was established based on the "torque-displacement" mathematical model. The results of co-simulation show that the displacement control accuracy of robot is improved with the increasing of fluctuation of driving torque based on single PID control. Besides the fluctuation of driving torque is reduced based on the compound control, and the adjustment amplitude of the driving torque is decreased about 24.7% comparing with PID control, which improves the output energy efficiency of the driving system of the robot.















2024, 43(5): 790-797.
doi: 10.13433/j.cnki.1003-8728.20230054
Abstract:
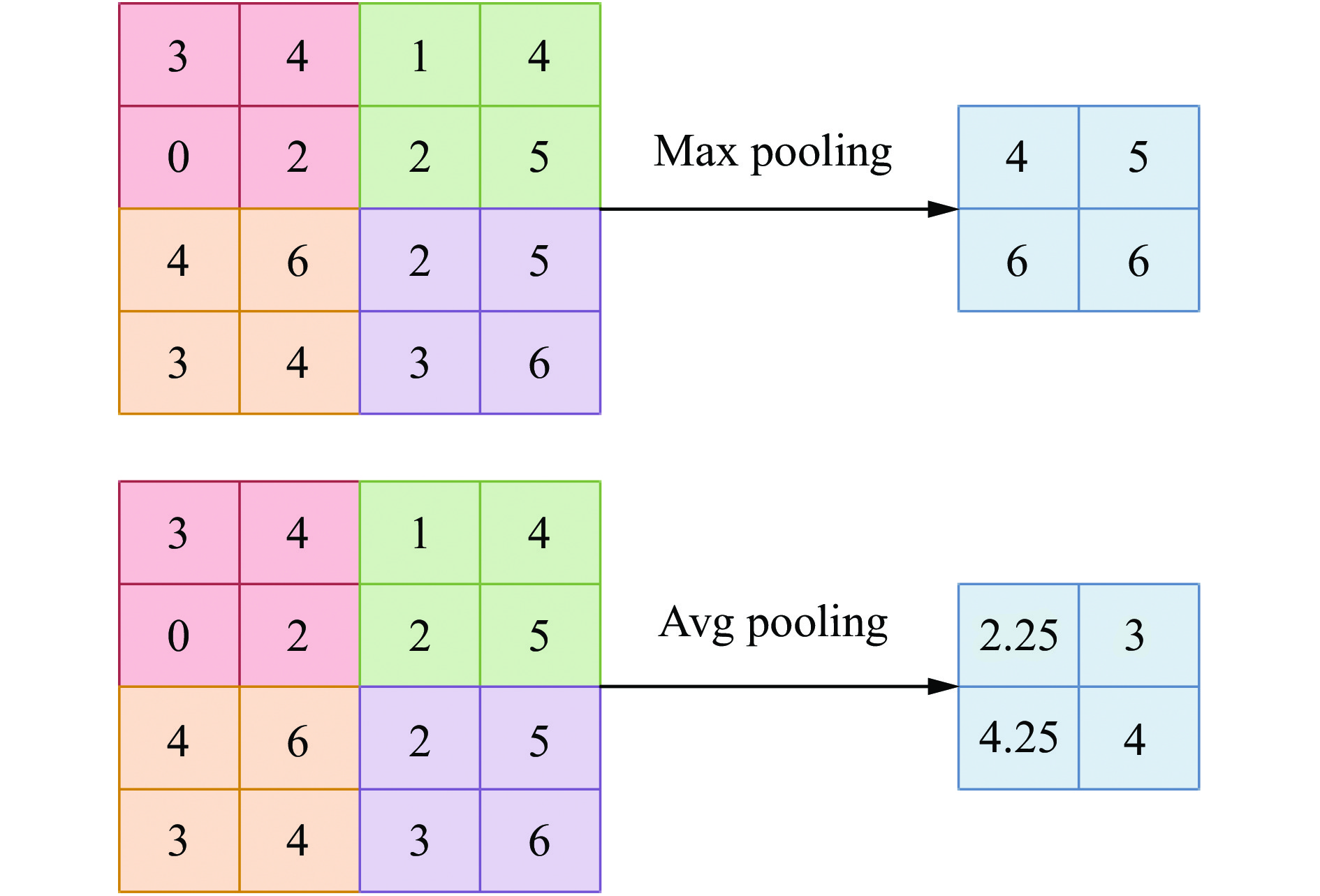
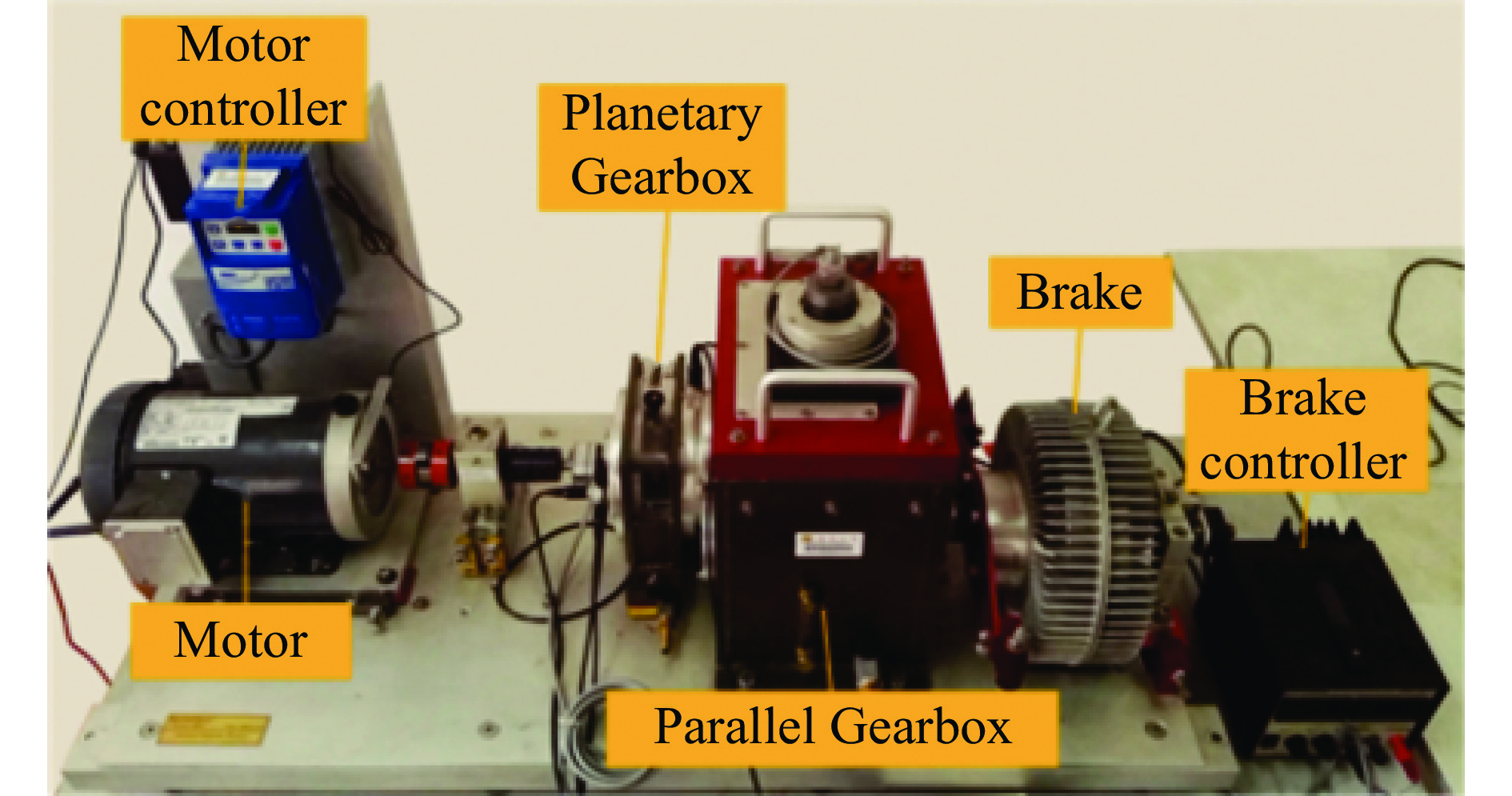
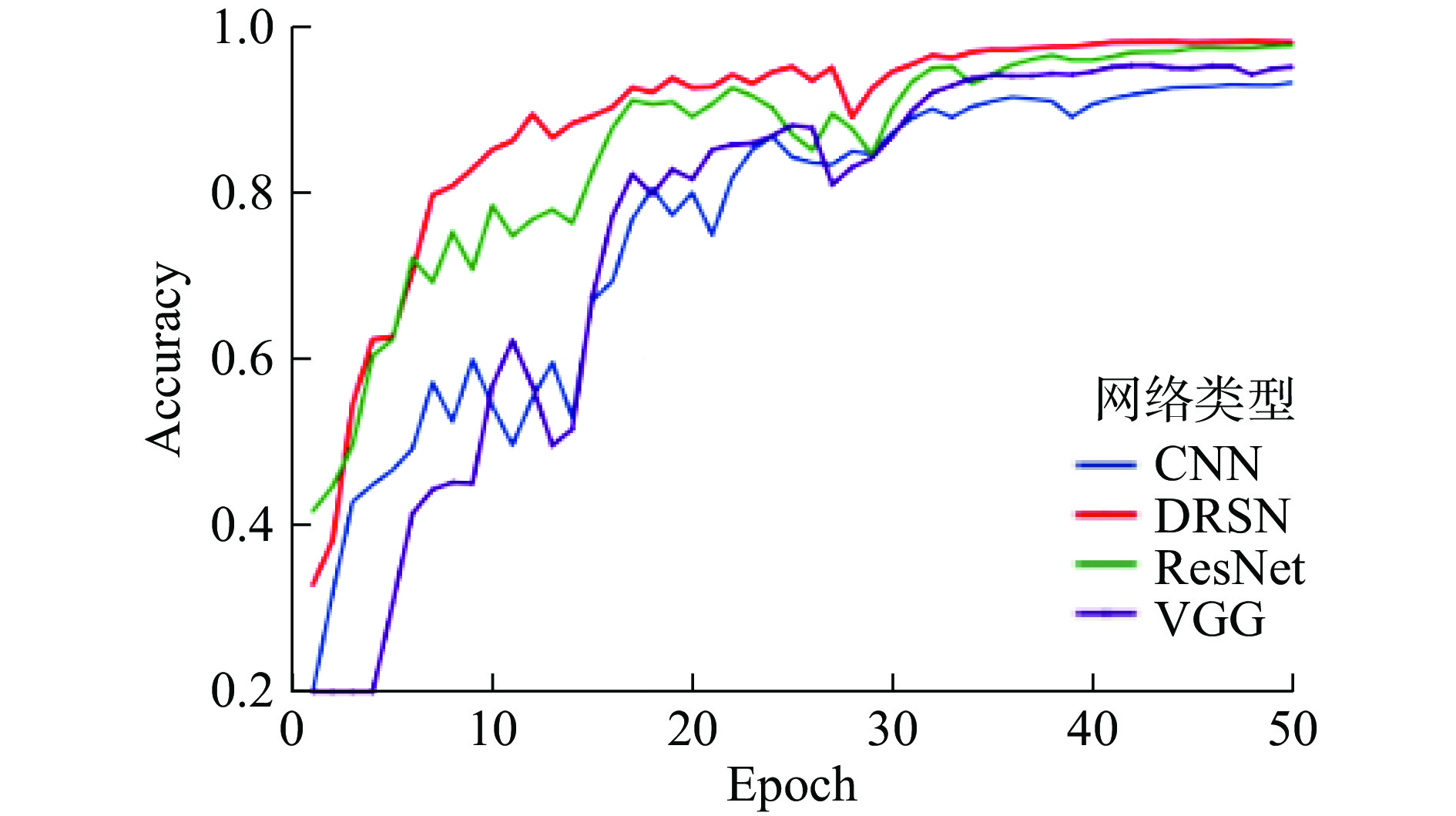
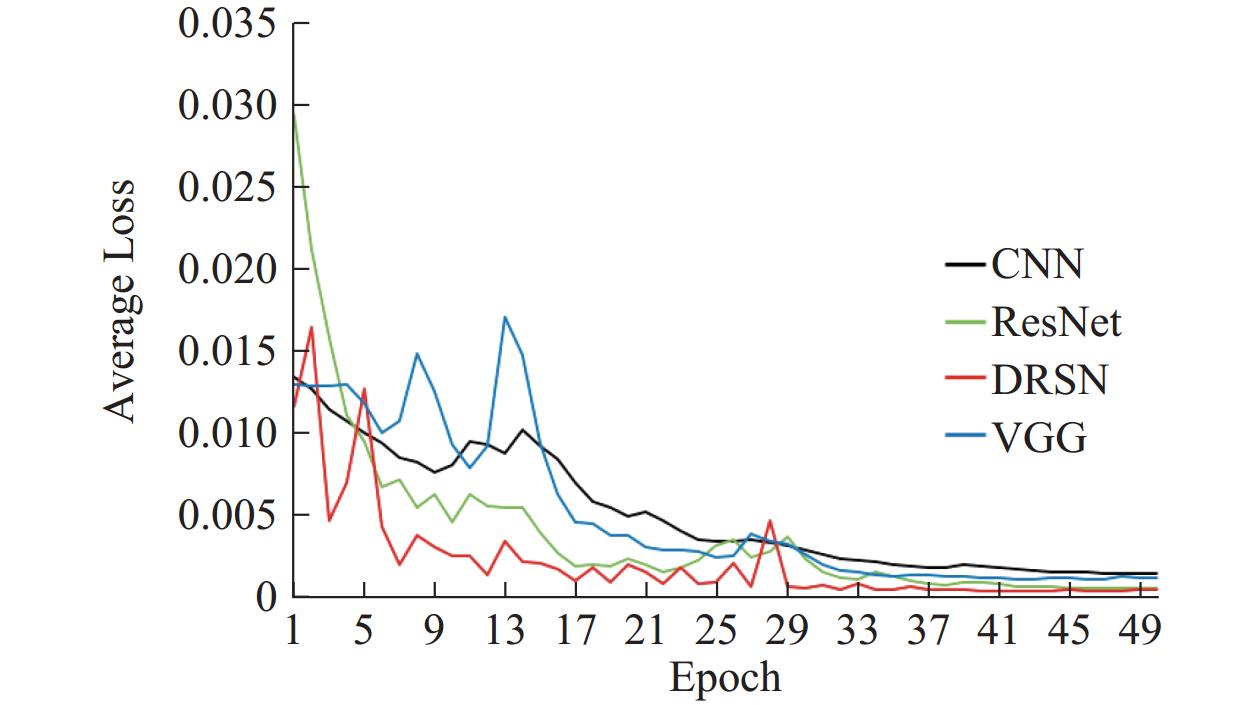
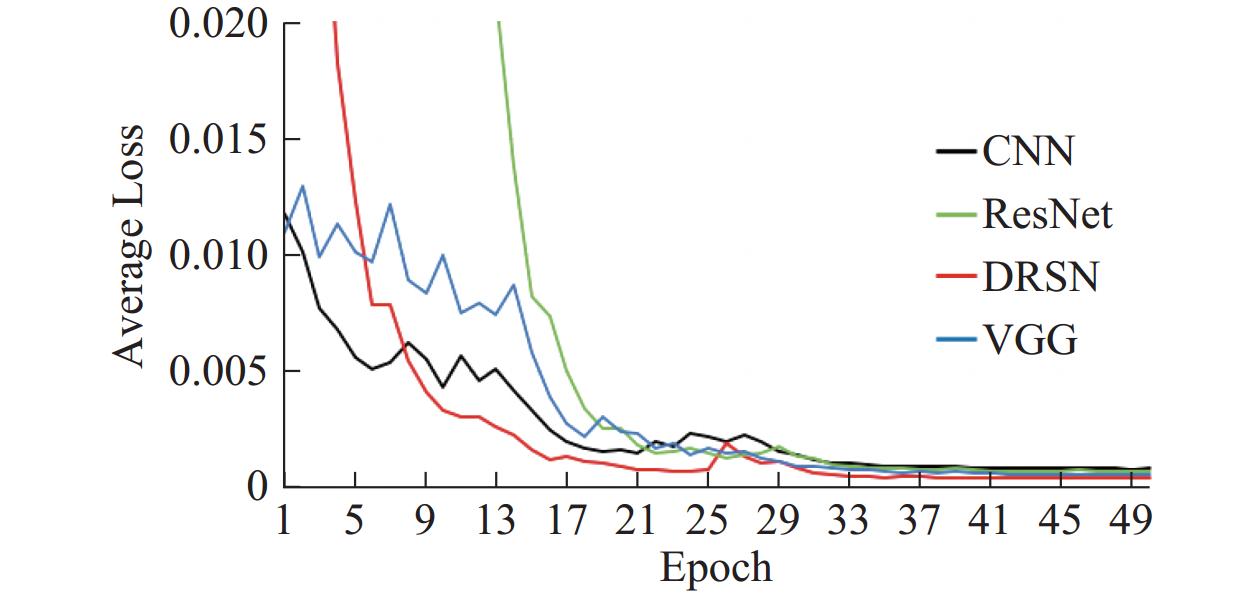
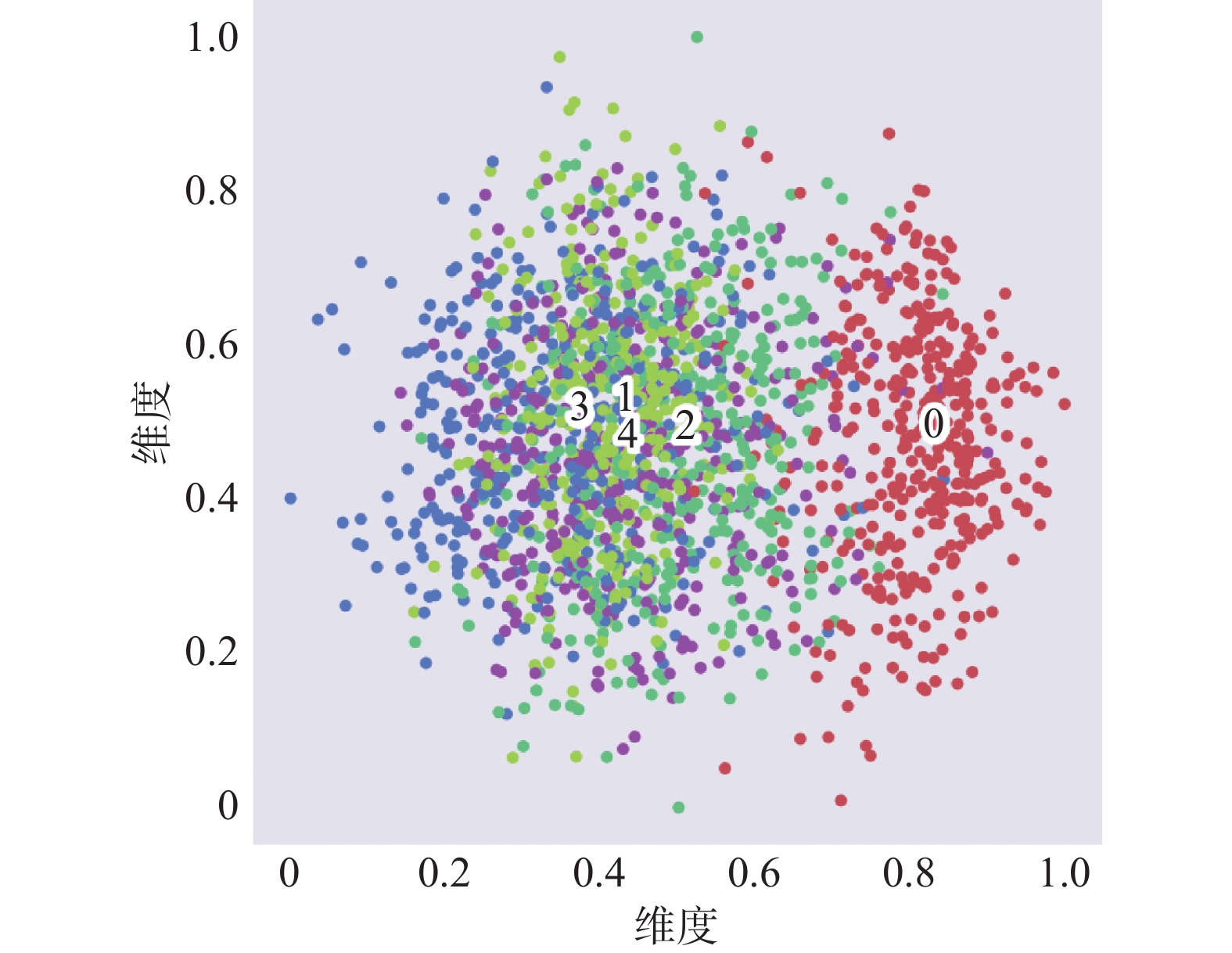
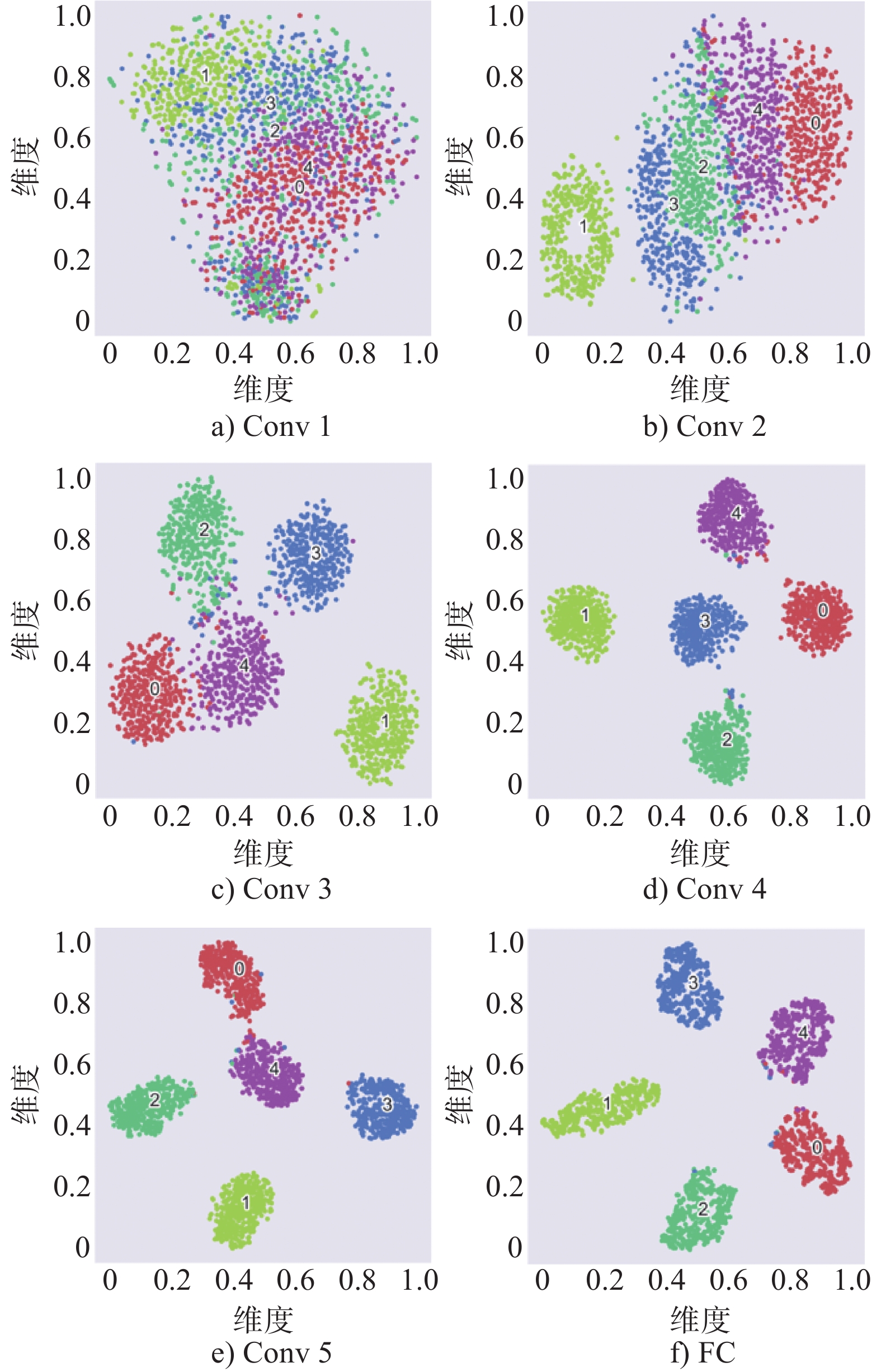
Accurate fault diagnosis of gears is an effective means to ensure stable and reliable operation of rotating machinery. Aiming at the problem of gear fault classification in gearboxes under strong noise environment, a fault diagnosis model based on continuous wavelet transform and deep residual shrinkage network is proposed. Firstly, wavelet transform is used to analyze the vibration data of one-dimensional time series, and it is converted into a two-dimensional time-frequency map as the input of the deep residual shrinkage network (DRSN). Secondly, based on the multi-layer convolutional neural network, the cross-layer identity connection in the residual structure is added to solve the problem of gradient disappearance and explosion, and then the adaptive threshold sub-network is used to achieve soft threshold noise reduction. Finally, the time-frequency map of the fault sample is used as the input of the diagnosis model to achieve fault classification. The experimental results show that compared with other models, the fault diagnosis method is easier to identify fault features, and the classification accuracy rate reaches 99.15%.
Accurate fault diagnosis of gears is an effective means to ensure stable and reliable operation of rotating machinery. Aiming at the problem of gear fault classification in gearboxes under strong noise environment, a fault diagnosis model based on continuous wavelet transform and deep residual shrinkage network is proposed. Firstly, wavelet transform is used to analyze the vibration data of one-dimensional time series, and it is converted into a two-dimensional time-frequency map as the input of the deep residual shrinkage network (DRSN). Secondly, based on the multi-layer convolutional neural network, the cross-layer identity connection in the residual structure is added to solve the problem of gradient disappearance and explosion, and then the adaptive threshold sub-network is used to achieve soft threshold noise reduction. Finally, the time-frequency map of the fault sample is used as the input of the diagnosis model to achieve fault classification. The experimental results show that compared with other models, the fault diagnosis method is easier to identify fault features, and the classification accuracy rate reaches 99.15%.








2024, 43(5): 798-804.
doi: 10.13433/j.cnki.1003-8728.20220254
Abstract:
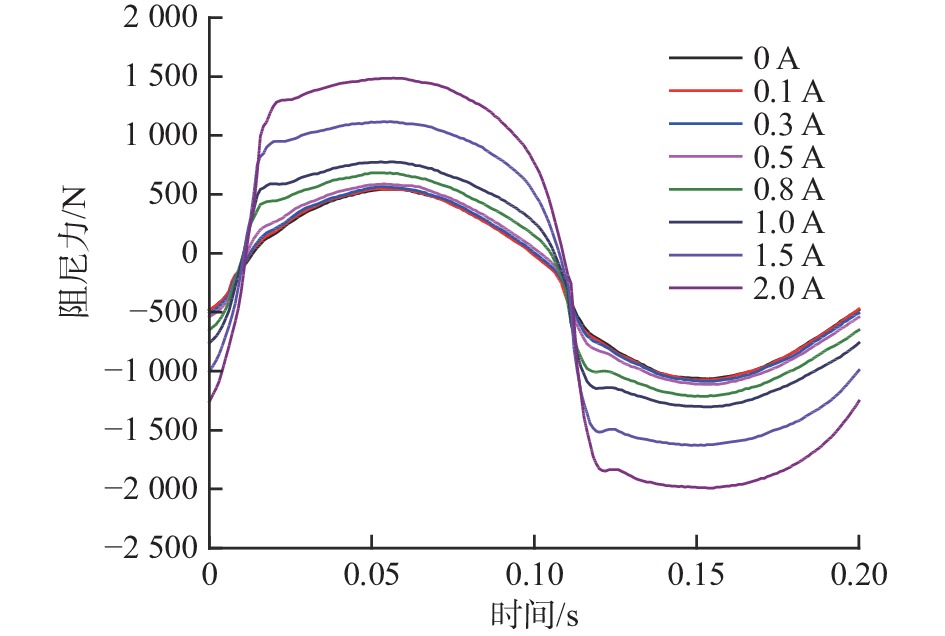
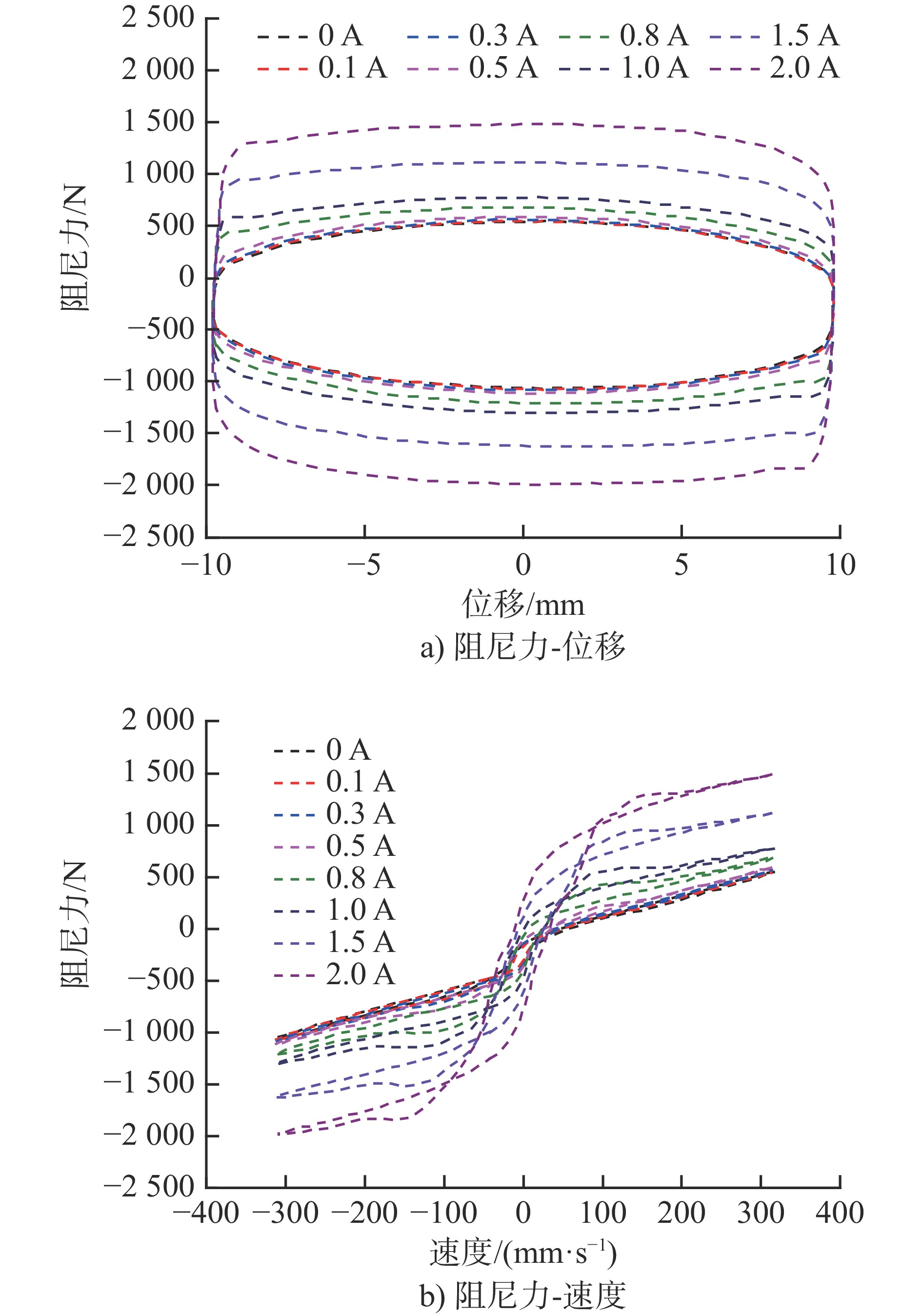
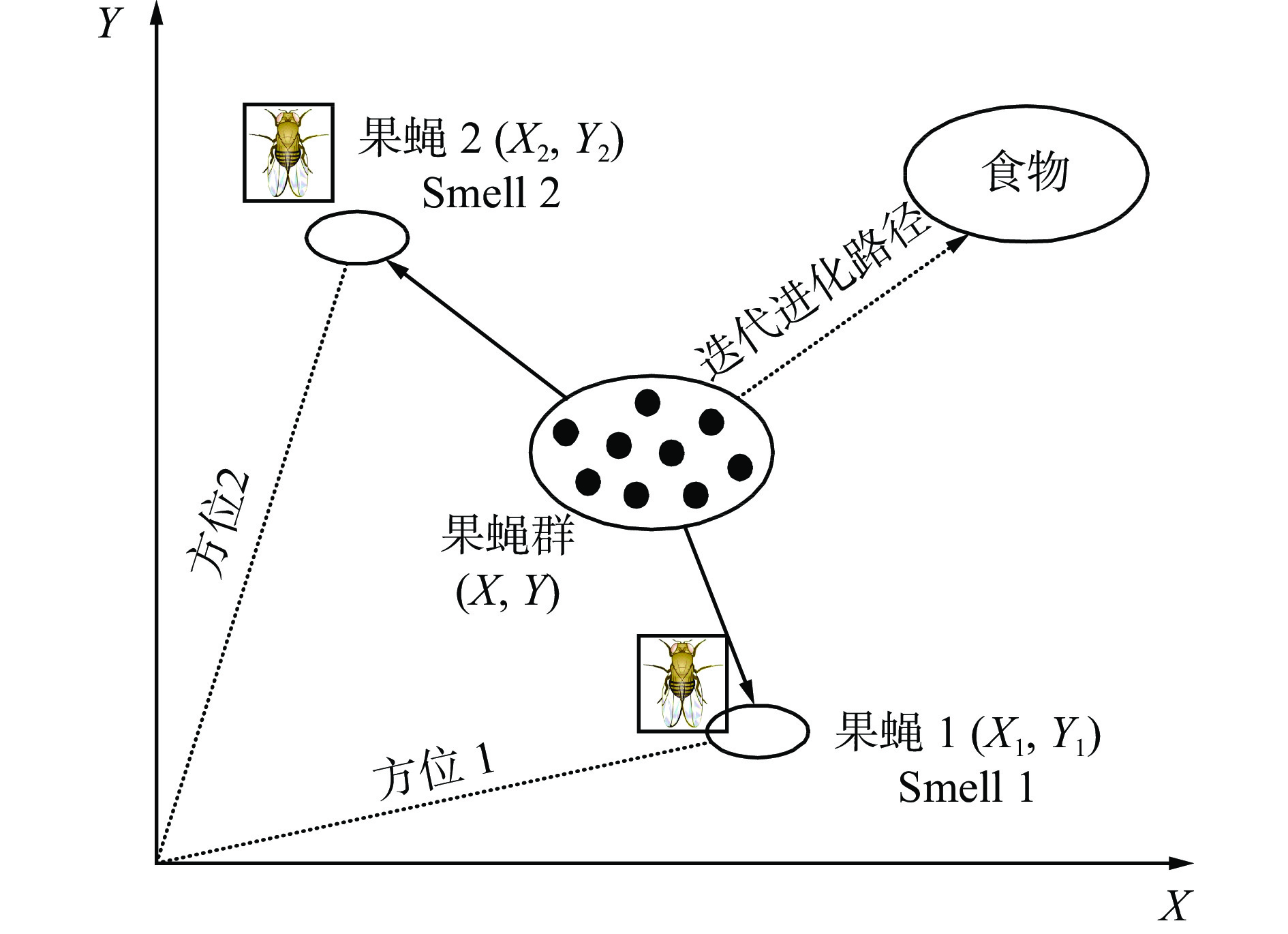
In order to exploit the advantages of semi-active vibration control of magnetorheological dampers, it is need to establish a suitable parametric model to study the dynamic output characteristics of the damper. The research work in this paper is under the conditions of 5 Hz excitation frequency and 10 mm amplitude, using the vibration system to test the magnetorheological damper under eight levels of excitation currents to obtain the dynamic output characteristics. On this basis, the visco-elastic-plastic parameter model is used to predict the actual measurement results under all currents using the drosophila optimization algorithm. The research results show that the output force of the damper can follow the change of the external displacement with time. The damping force increases slowly and then significantly increases with the increase of the excitation current, which shows that the damper depends on the controllability of the input current, which provide conditions for the realization of semi-active control in engineering applications. The reason for this phenomenon is caused by the interaction between the particles and the matrix under different currents. The prediction results show that the visco-elastic-plastic parameter model can describe the actual measurement result well using the drosophila optimization algorithm.
In order to exploit the advantages of semi-active vibration control of magnetorheological dampers, it is need to establish a suitable parametric model to study the dynamic output characteristics of the damper. The research work in this paper is under the conditions of 5 Hz excitation frequency and 10 mm amplitude, using the vibration system to test the magnetorheological damper under eight levels of excitation currents to obtain the dynamic output characteristics. On this basis, the visco-elastic-plastic parameter model is used to predict the actual measurement results under all currents using the drosophila optimization algorithm. The research results show that the output force of the damper can follow the change of the external displacement with time. The damping force increases slowly and then significantly increases with the increase of the excitation current, which shows that the damper depends on the controllability of the input current, which provide conditions for the realization of semi-active control in engineering applications. The reason for this phenomenon is caused by the interaction between the particles and the matrix under different currents. The prediction results show that the visco-elastic-plastic parameter model can describe the actual measurement result well using the drosophila optimization algorithm.





2024, 43(5): 805-811.
doi: 10.13433/j.cnki.1003-8728.20220294
Abstract:
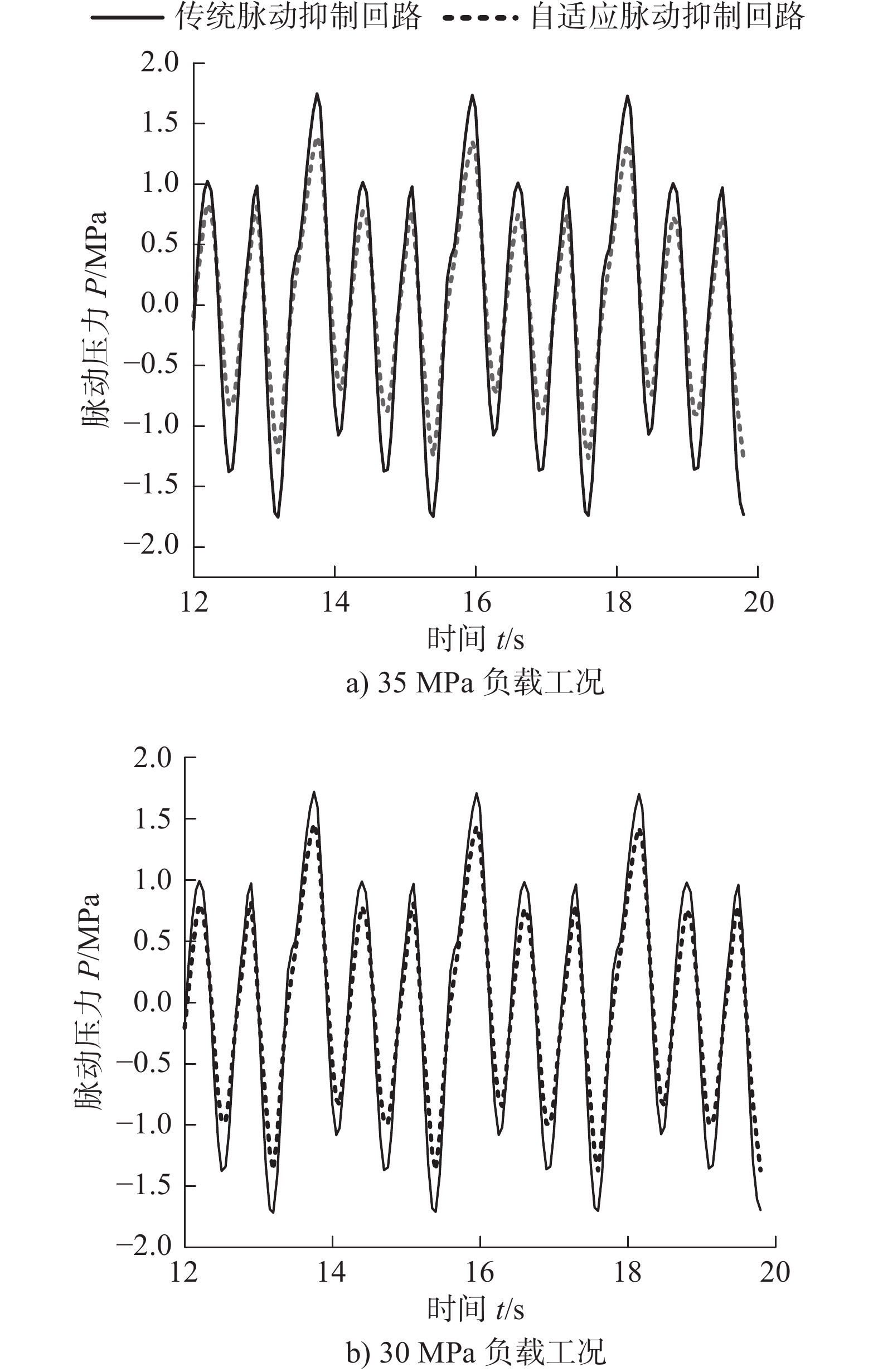
Aiming at the problem of fluid pulsation in hydraulic driven fracturing pump, the pulsation mechanism was analyzed. Through theoretical research on the traditional pulsation suppression circuit based on accumulator and booster cylinder combination, an adaptive fluid pulsation suppression method based on accumulator and booster cylinder combination was proposed, and the adaptive pulsation suppression characteristics were theoretically analyzed. The influence of parameters such as steady pressure on pulsation suppression was studied. MATLAB/Simulink software was used to establish a mathematical model of fluid pulsation suppression loop, and the two suppression methods were compared and simulated. The results showed that: compared with the pulsation suppression method based on accumulator and booster cylinder combination, the adaptive method has better suppression effect, and its pulsation pressure amplitude is about 45% - 86% of that of the traditional method, and it has certain adaptability, good stability and flexibility.
Aiming at the problem of fluid pulsation in hydraulic driven fracturing pump, the pulsation mechanism was analyzed. Through theoretical research on the traditional pulsation suppression circuit based on accumulator and booster cylinder combination, an adaptive fluid pulsation suppression method based on accumulator and booster cylinder combination was proposed, and the adaptive pulsation suppression characteristics were theoretically analyzed. The influence of parameters such as steady pressure on pulsation suppression was studied. MATLAB/Simulink software was used to establish a mathematical model of fluid pulsation suppression loop, and the two suppression methods were compared and simulated. The results showed that: compared with the pulsation suppression method based on accumulator and booster cylinder combination, the adaptive method has better suppression effect, and its pulsation pressure amplitude is about 45% - 86% of that of the traditional method, and it has certain adaptability, good stability and flexibility.





2024, 43(5): 812-818.
doi: 10.13433/j.cnki.1003-8728.20220284
Abstract:
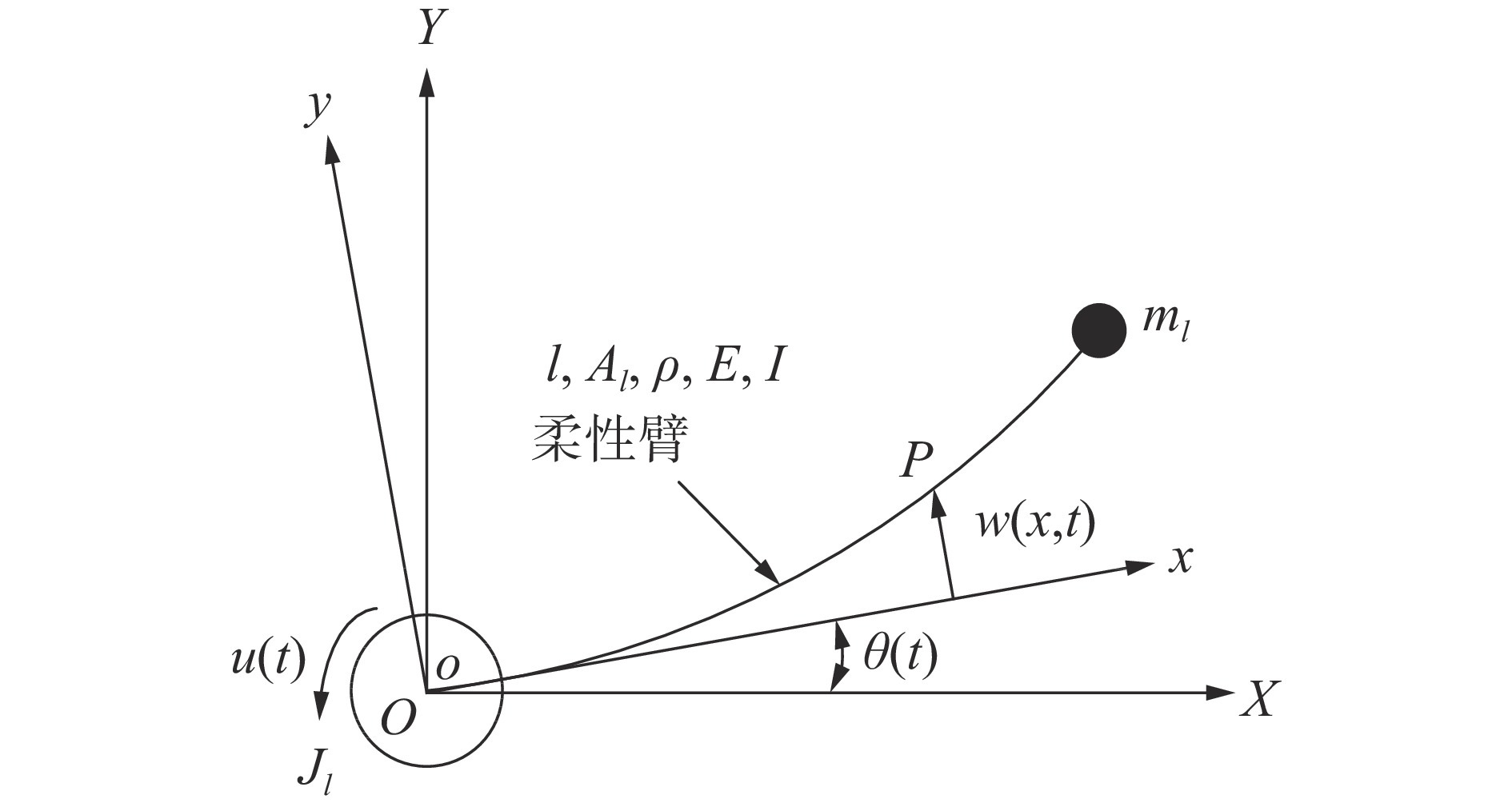
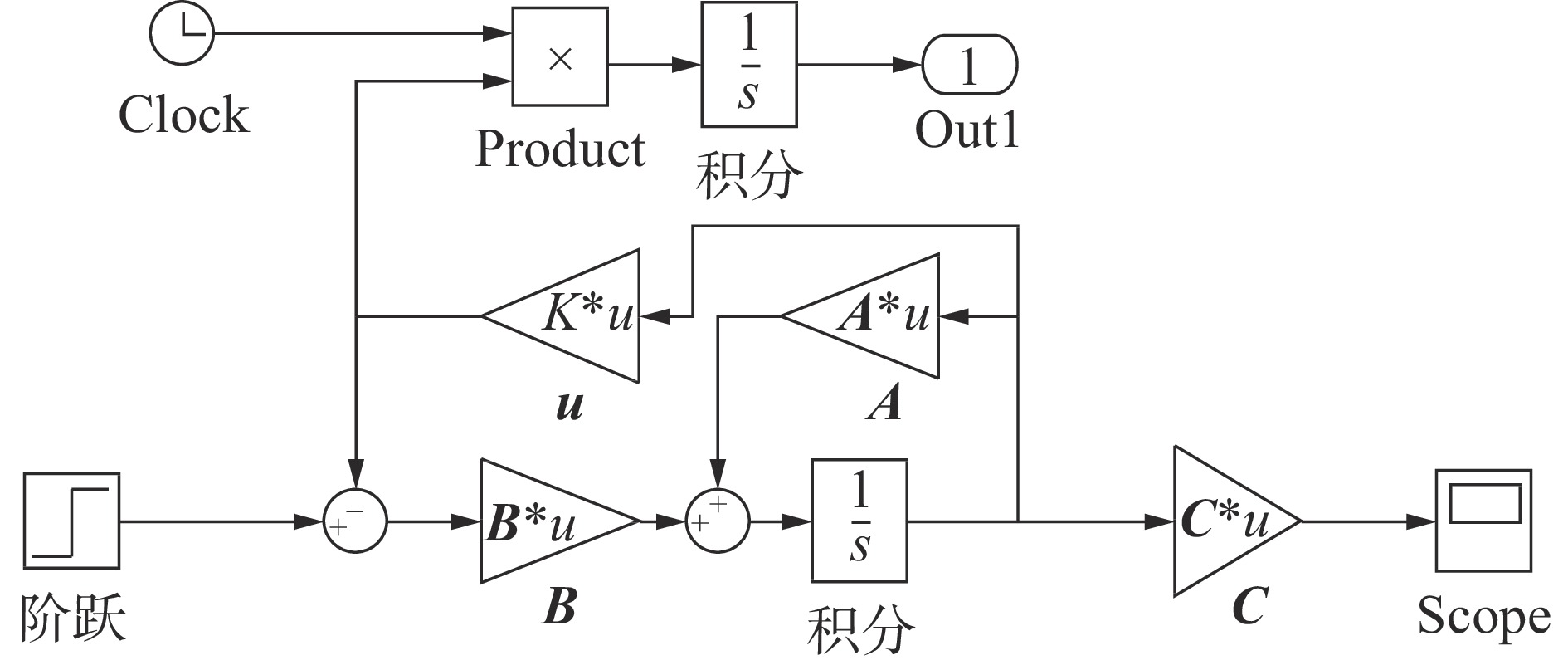
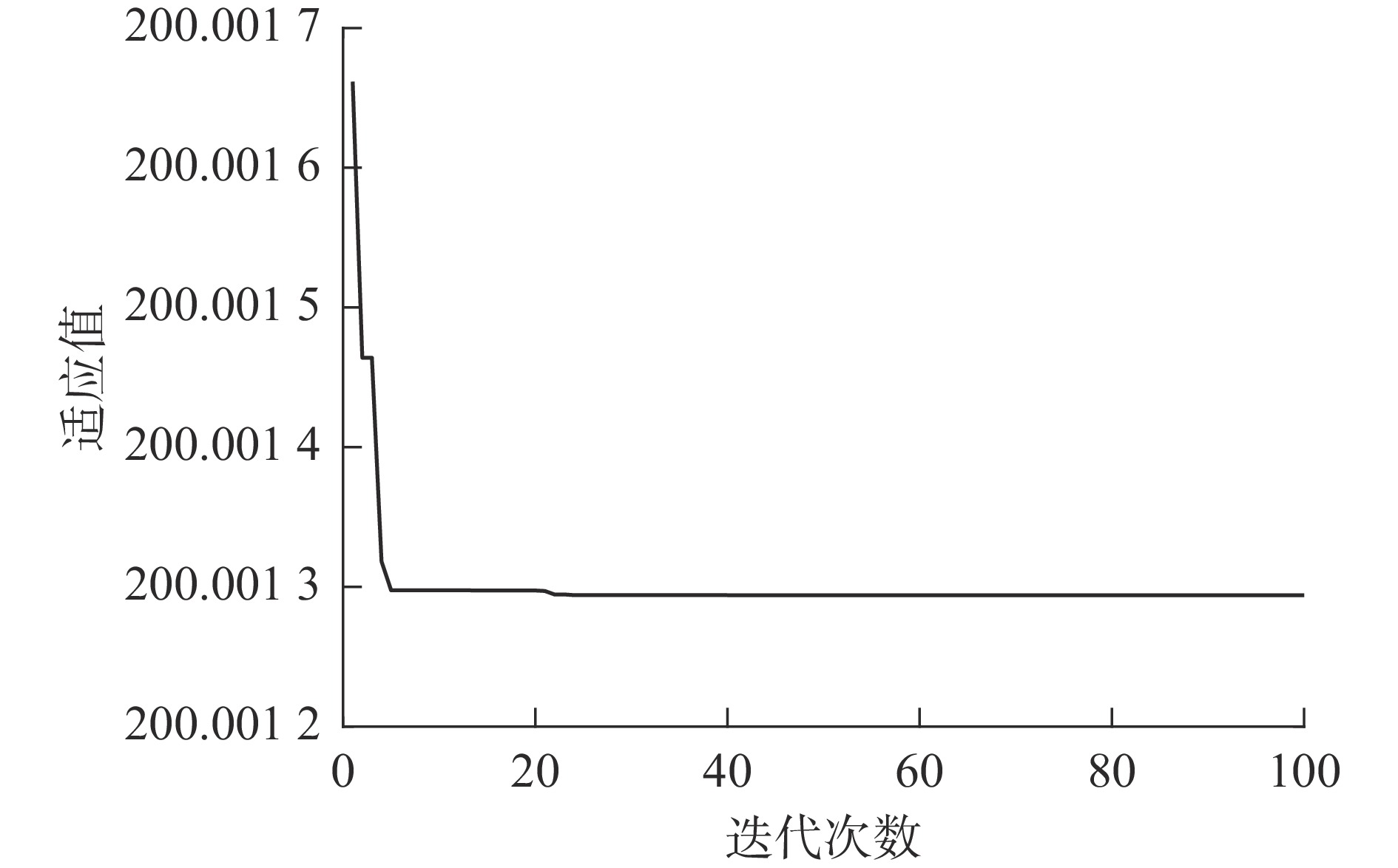
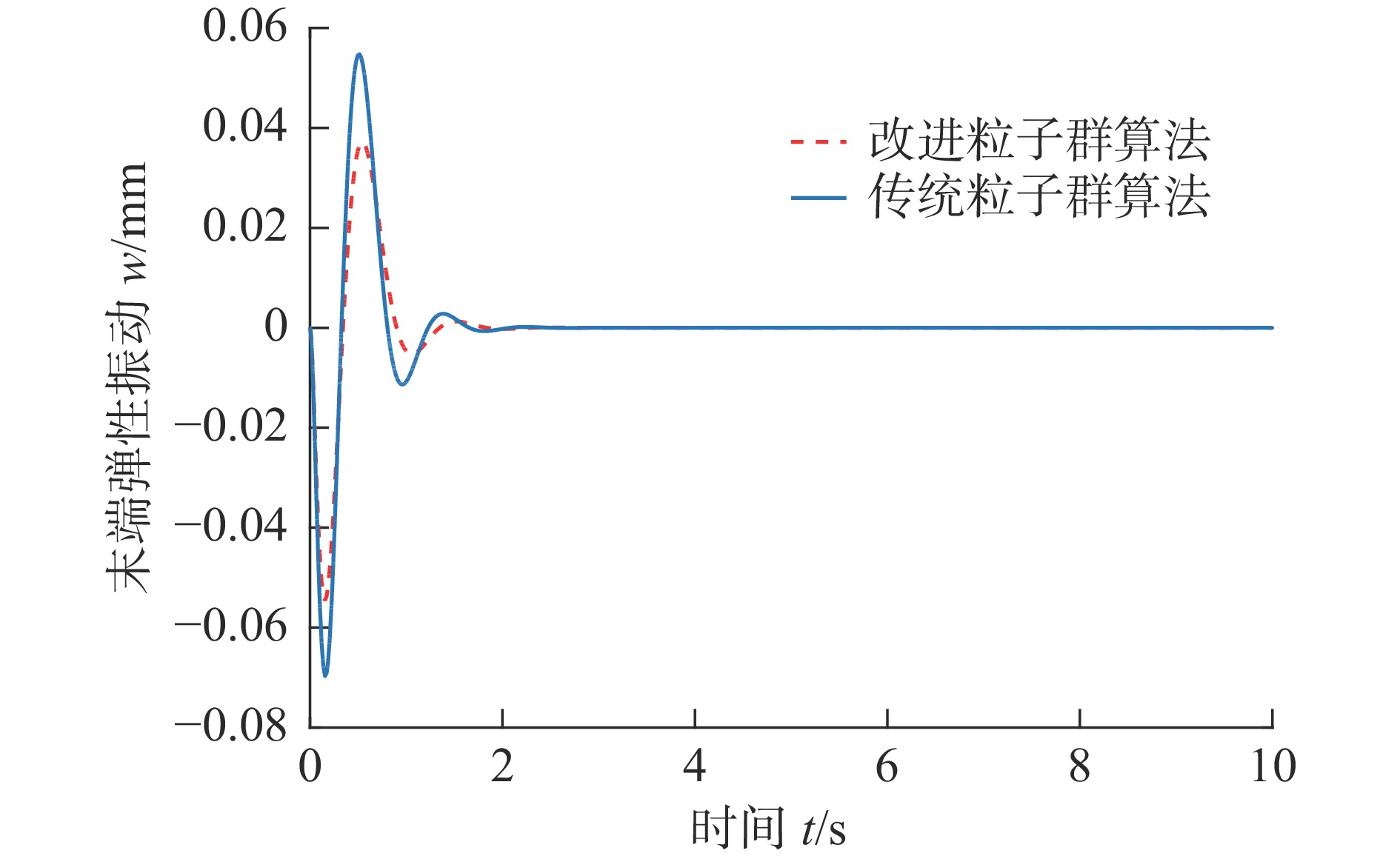
When using traditional linear quadratic regulator (LQR) method to control flexible manipulator, the weighted matrix is usually chosen based on prior knowledge. The particle swarm algorithm can independently to find the optimal solution through iterative operation, but the convergence speed of traditional particle swarm optimization (PSO) algorithm is relatively slow. This article proposes an improved particle swarm algorithm to optimize the weighted matrix of LQR control method. The dynamics equation of the flexible manipulator is established by Lagrange equation, and its control model is deduced based on LQR. Based on the traditional particle swarm optimization (PSO), the crossover operation and nonlinear dynamic inertial weight are introduced to improve the global and local search capability. Finally, the comparison and analysis of controlled flexible manipulator simulation results show that the improved PSO algorithm has faster convergence speed and better vibration suppression effect than the traditional PSO algorithm, which provides assistance and support for manipulator's higher precision applications.
When using traditional linear quadratic regulator (LQR) method to control flexible manipulator, the weighted matrix is usually chosen based on prior knowledge. The particle swarm algorithm can independently to find the optimal solution through iterative operation, but the convergence speed of traditional particle swarm optimization (PSO) algorithm is relatively slow. This article proposes an improved particle swarm algorithm to optimize the weighted matrix of LQR control method. The dynamics equation of the flexible manipulator is established by Lagrange equation, and its control model is deduced based on LQR. Based on the traditional particle swarm optimization (PSO), the crossover operation and nonlinear dynamic inertial weight are introduced to improve the global and local search capability. Finally, the comparison and analysis of controlled flexible manipulator simulation results show that the improved PSO algorithm has faster convergence speed and better vibration suppression effect than the traditional PSO algorithm, which provides assistance and support for manipulator's higher precision applications.





2024, 43(5): 819-831.
doi: 10.13433/j.cnki.1003-8728.20220283
Abstract:
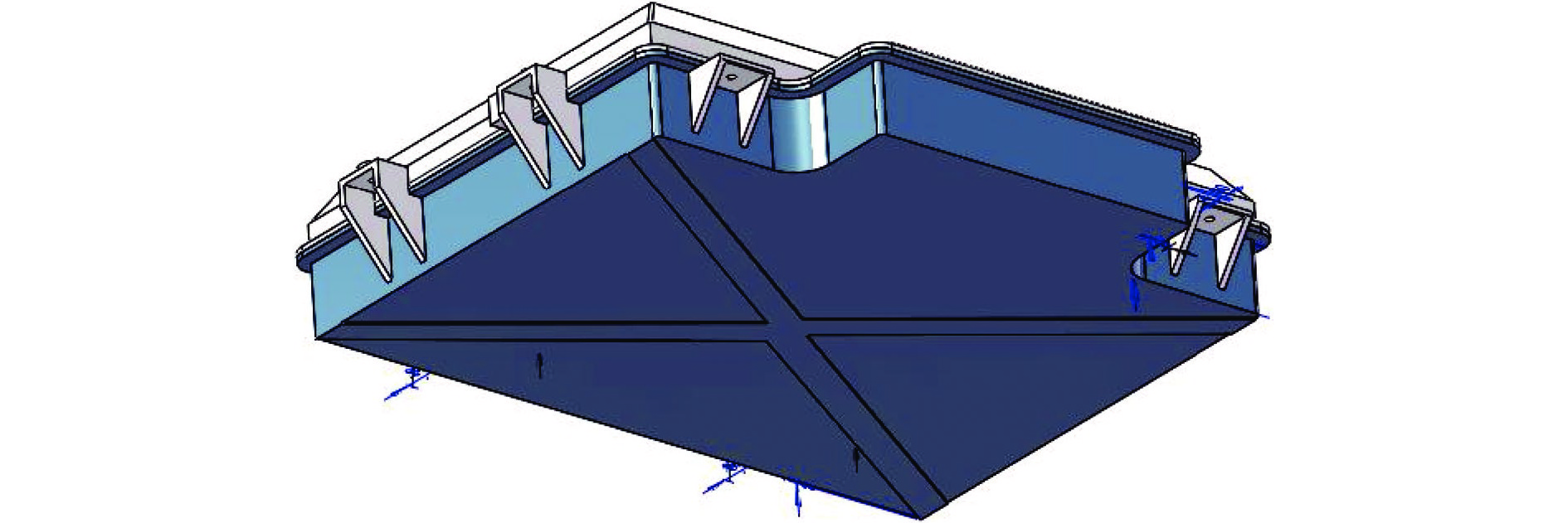
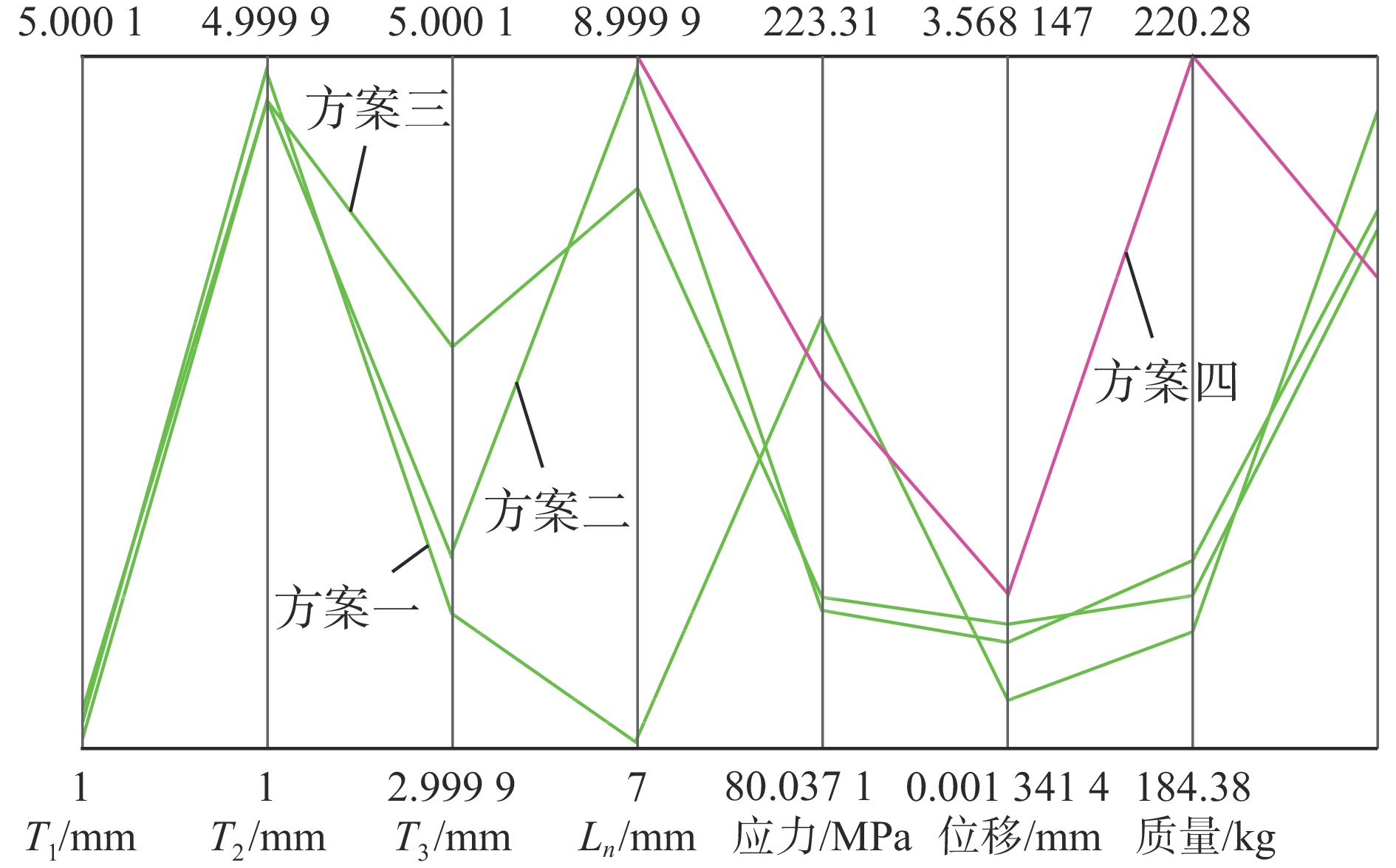
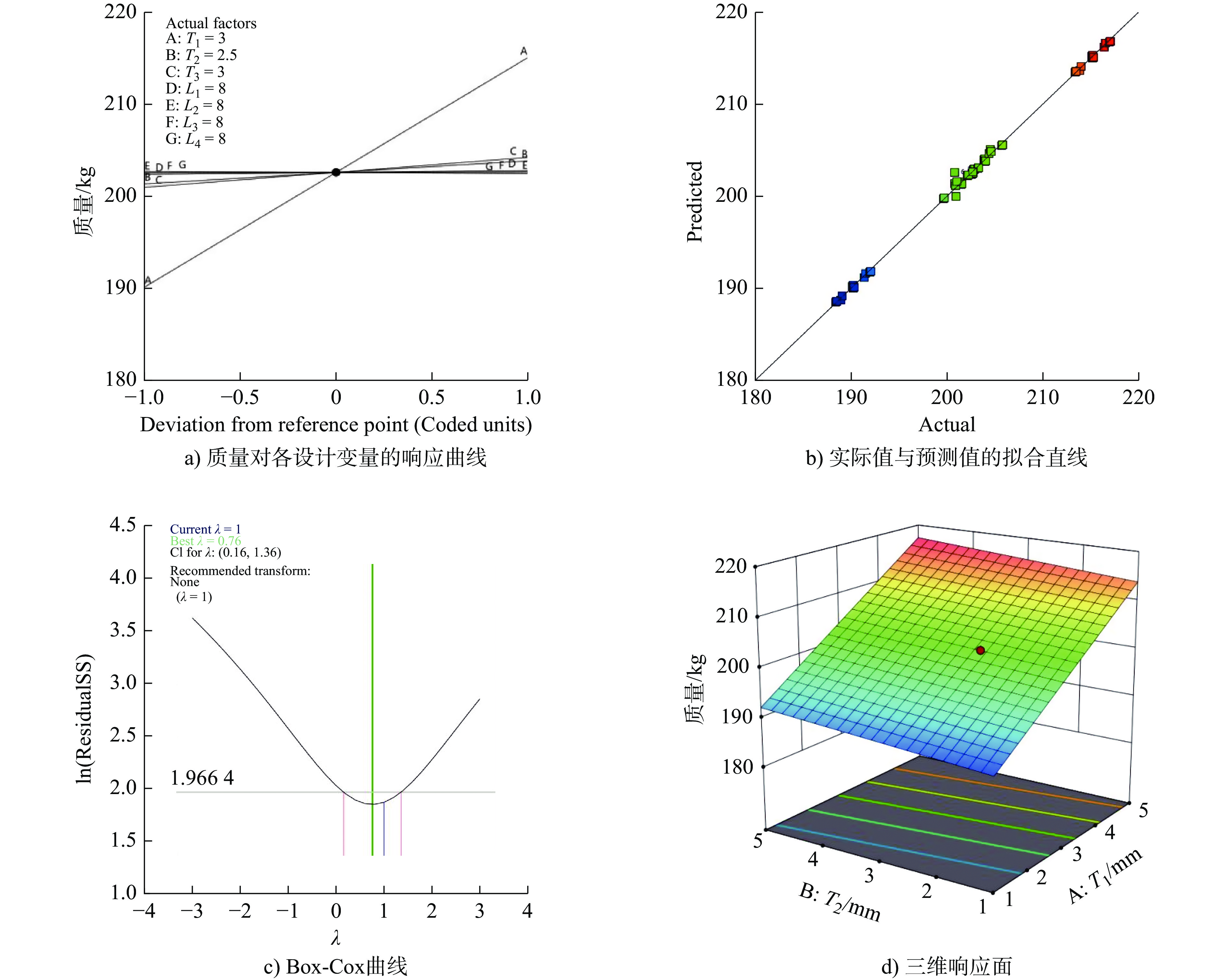
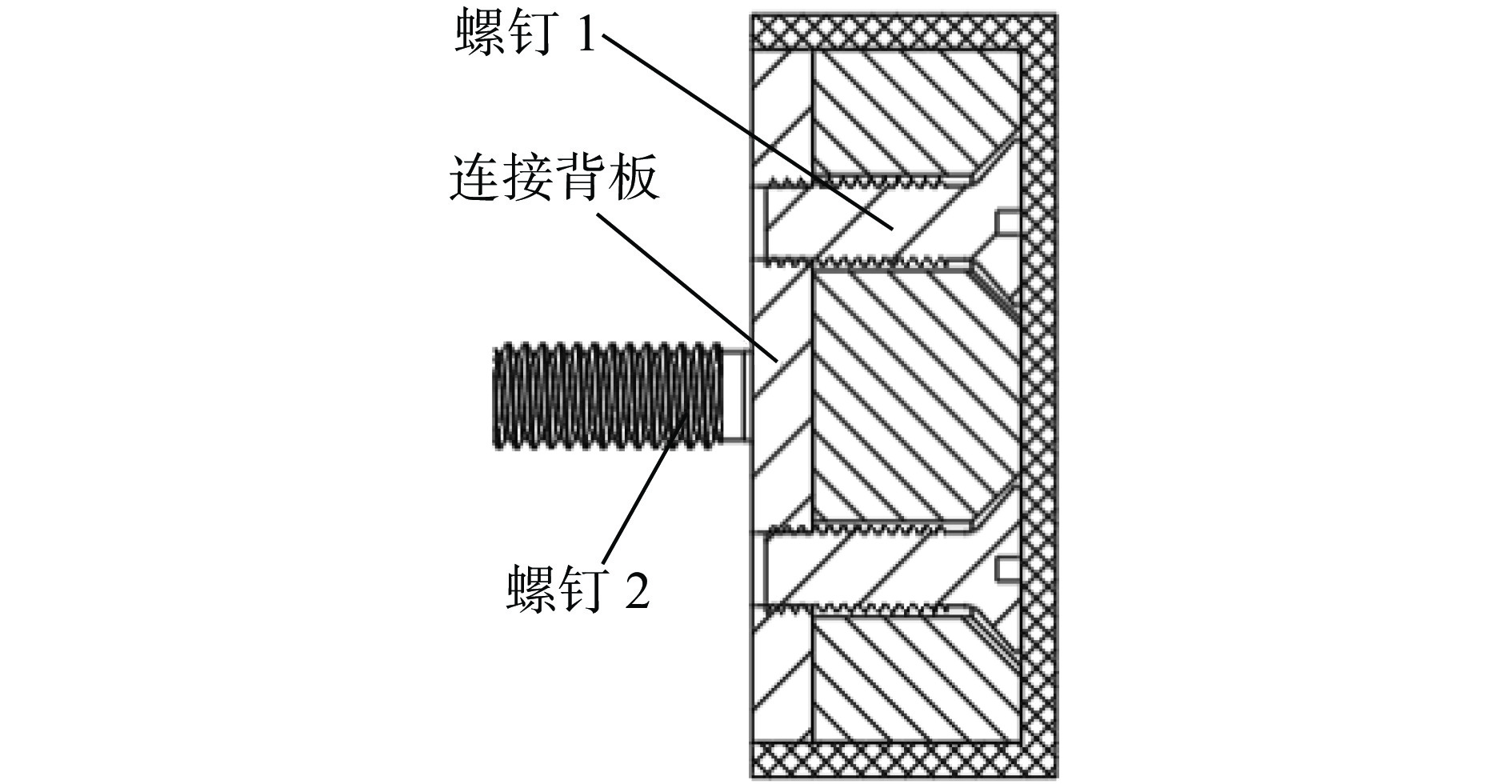
To solve the problems of massive and stress concentration of ternary lithium battery case. The parameters after the variable density topology optimization were sampled using the Latin hypercube method, and the Pareto ranking multi-objective genetic algorithm was utilized to select stresses, etc. as the objective function for iterative calculation. The paper used Kriging space interpolation to obtain each response profile and a preliminary predicted optimization scheme. Based on the above results, a 62-group response surface mathematical model was established using Design-Expert, and the calculated Pareto optimum was 70%, with the p-value ≤ 0.000 1. This proves the accuracy of the response surface model, and the performance of the optimized structure after simulation has been improved in all aspects compared to the original model, with better reliability.
To solve the problems of massive and stress concentration of ternary lithium battery case. The parameters after the variable density topology optimization were sampled using the Latin hypercube method, and the Pareto ranking multi-objective genetic algorithm was utilized to select stresses, etc. as the objective function for iterative calculation. The paper used Kriging space interpolation to obtain each response profile and a preliminary predicted optimization scheme. Based on the above results, a 62-group response surface mathematical model was established using Design-Expert, and the calculated Pareto optimum was 70%, with the p-value ≤ 0.000 1. This proves the accuracy of the response surface model, and the performance of the optimized structure after simulation has been improved in all aspects compared to the original model, with better reliability.












2024, 43(5): 832-836.
doi: 10.13433/j.cnki.1003-8728.20220292
Abstract:
In order to improve the fault diagnosis efficiency of motorized spindle of NC machine tool, a WPD-TSNE-SVM combined model was designed. The main shaft vibration signal is decomposed by using the wavelet packet method, and the dimensionality reduction process of sample set TSNE is completed, and the fault classification of reconstructed features is completed via SVM. The mixed feature space vector of NC machine tool spindle signal was constructed, and the fault diagnosis was analyzed. The results show that the training sample data of TSNE method form regular distribution characteristics, and nonlinear SVM multi-fault classifier is used to achieve the accurate fault classification of wavelet packet mixed features. The nonlinear SVM diagnosis method based on the radial basis kernel function can achieve the higher accuracy. This method can diagnose the running faults of bearings, obtain higher maintenance efficiency, and ensure the running stability of CNC machine tool spindle.
In order to improve the fault diagnosis efficiency of motorized spindle of NC machine tool, a WPD-TSNE-SVM combined model was designed. The main shaft vibration signal is decomposed by using the wavelet packet method, and the dimensionality reduction process of sample set TSNE is completed, and the fault classification of reconstructed features is completed via SVM. The mixed feature space vector of NC machine tool spindle signal was constructed, and the fault diagnosis was analyzed. The results show that the training sample data of TSNE method form regular distribution characteristics, and nonlinear SVM multi-fault classifier is used to achieve the accurate fault classification of wavelet packet mixed features. The nonlinear SVM diagnosis method based on the radial basis kernel function can achieve the higher accuracy. This method can diagnose the running faults of bearings, obtain higher maintenance efficiency, and ensure the running stability of CNC machine tool spindle.




2024, 43(5): 837-843.
doi: 10.13433/j.cnki.1003-8728.20230042
Abstract:
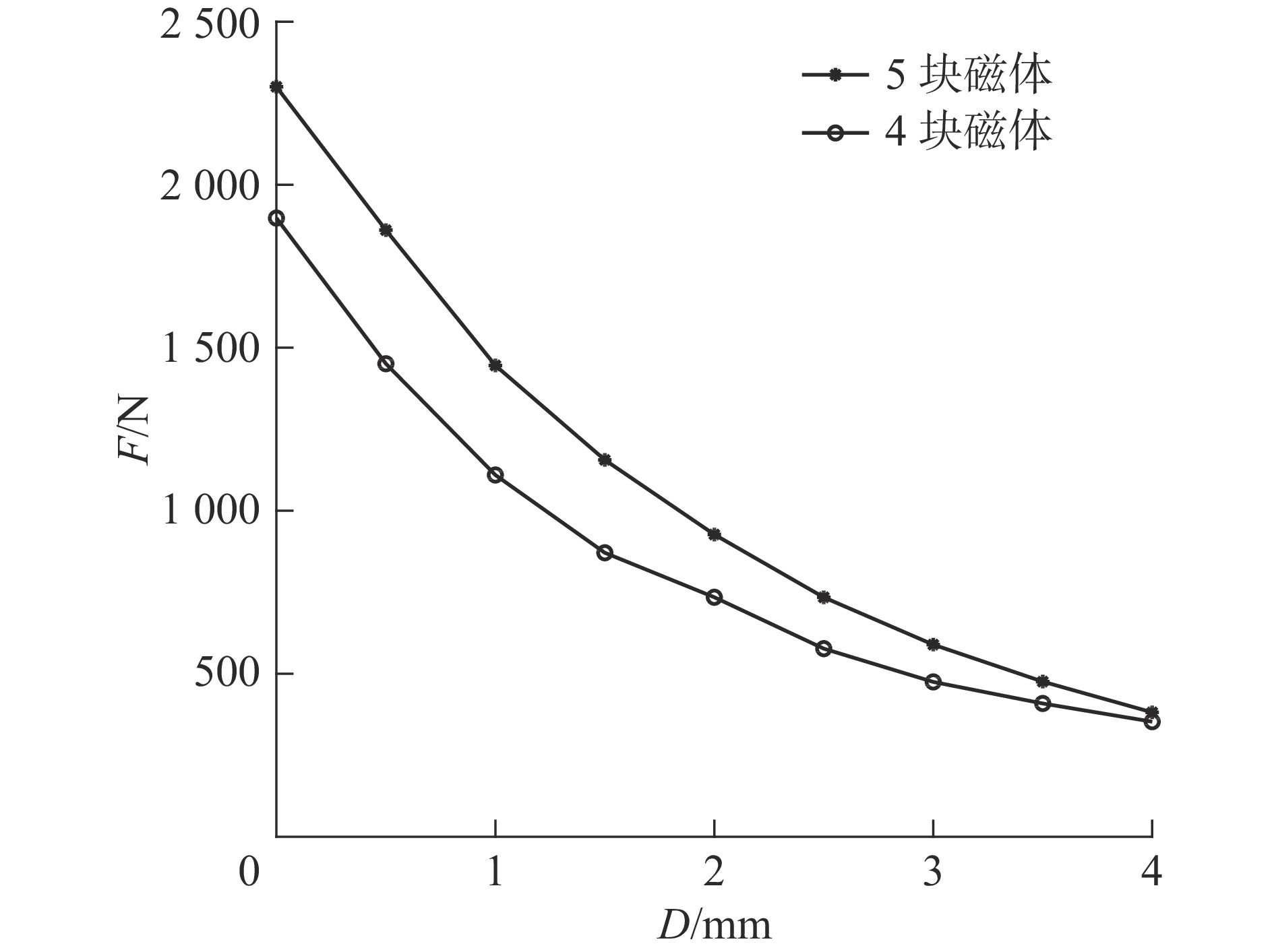
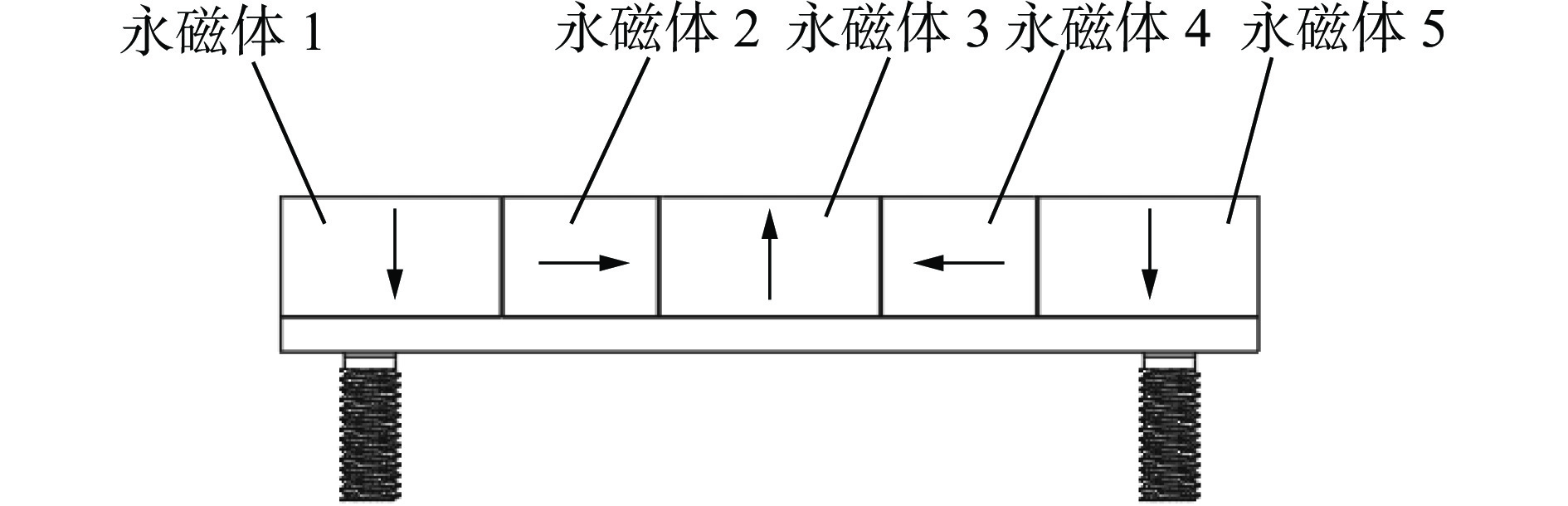
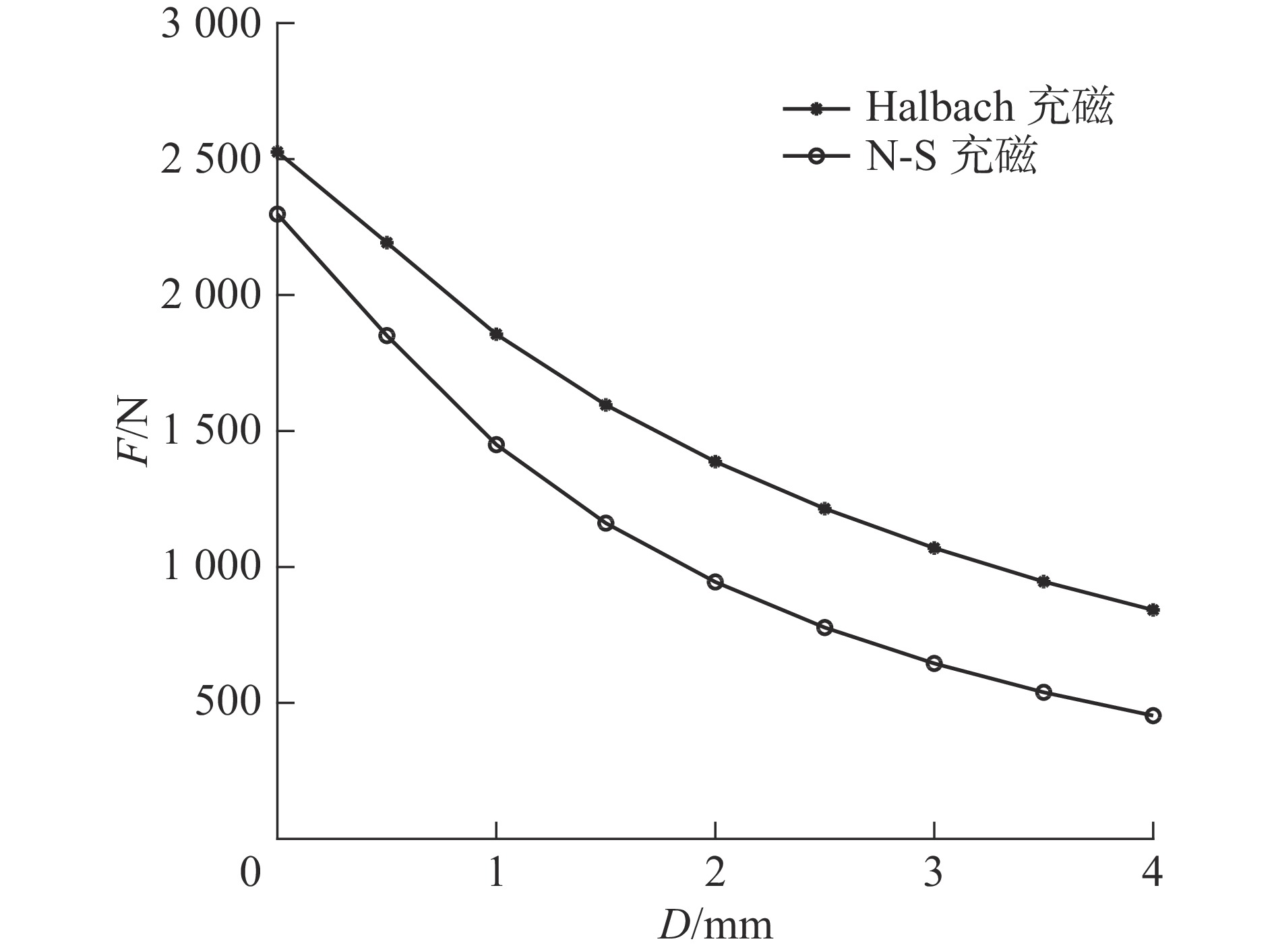
To improve the wall attachment stability of a crawler wall-climbing robot equipped with high-pressure water jet devices and the structural characteristics of the designed wall-climbing robot, the kinematic model of a wall-climbing robot adsorbing on the ship wall is established. The factors affecting the wall attachment performance of the wall-climbing robot are analyzed and solved. Its magnetic adsorption unit is designed, and the relationship between the magnetic force and gap of the magnetic adsorption unit in the N-S magnetization and the Halbach magnetization direction is analyzed. With the help of the tensile testing machine, the reliability of the permanent magnetic adsorption unit is tested and verified. For the functional prototype, tests of indoor horizontal walking and vertical wall climbing of a 1∶1 real ship model are carried out to verify the correctness of the analysis results, thus paving the way for the further structural optimization design and dynamic analysis of the crawler wall-climbing robot.
To improve the wall attachment stability of a crawler wall-climbing robot equipped with high-pressure water jet devices and the structural characteristics of the designed wall-climbing robot, the kinematic model of a wall-climbing robot adsorbing on the ship wall is established. The factors affecting the wall attachment performance of the wall-climbing robot are analyzed and solved. Its magnetic adsorption unit is designed, and the relationship between the magnetic force and gap of the magnetic adsorption unit in the N-S magnetization and the Halbach magnetization direction is analyzed. With the help of the tensile testing machine, the reliability of the permanent magnetic adsorption unit is tested and verified. For the functional prototype, tests of indoor horizontal walking and vertical wall climbing of a 1∶1 real ship model are carried out to verify the correctness of the analysis results, thus paving the way for the further structural optimization design and dynamic analysis of the crawler wall-climbing robot.











2024, 43(5): 844-850.
doi: 10.13433/j.cnki.1003-8728.20220262
Abstract:
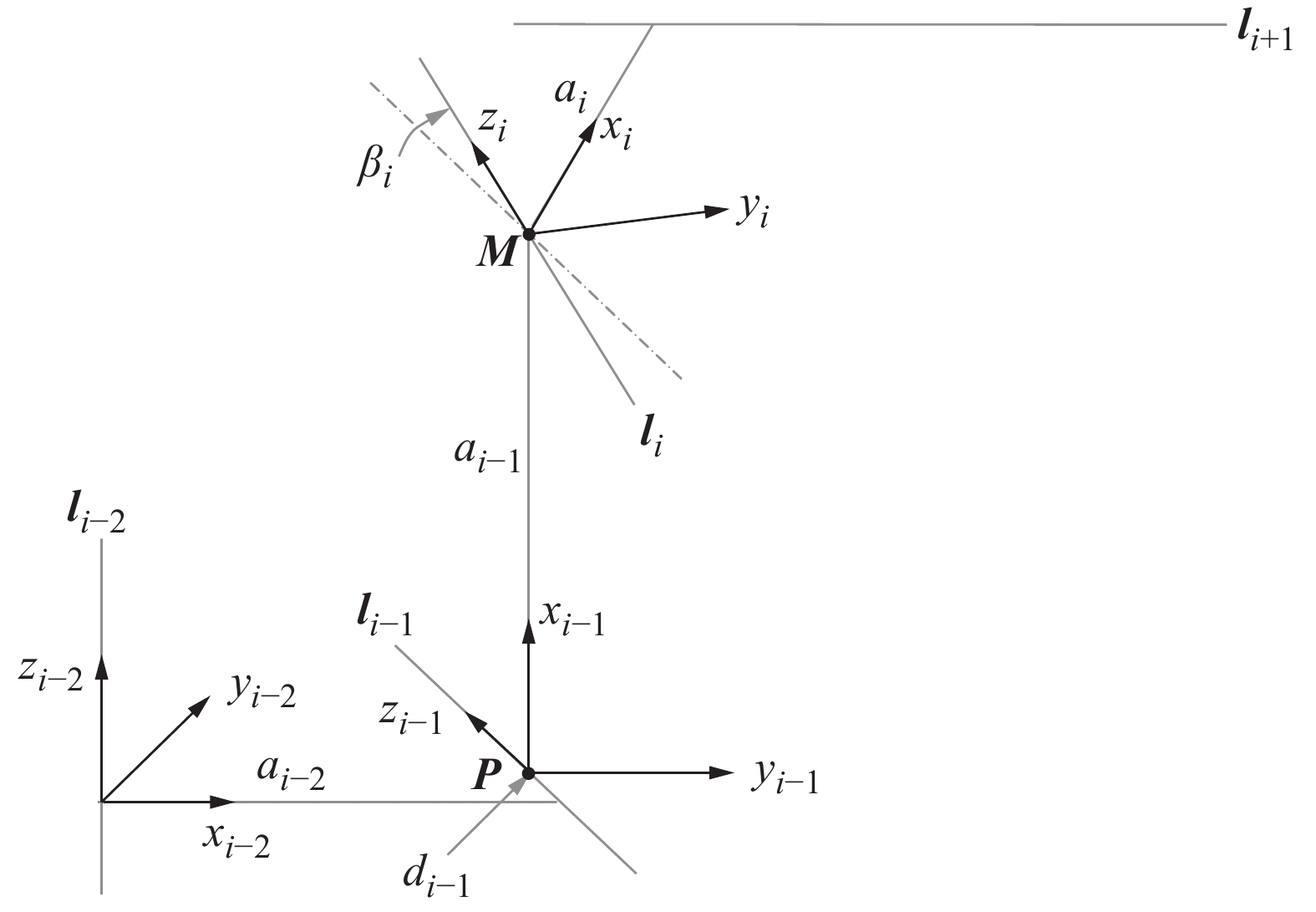
The axis rotation calibration method is to obtain the measuring points by rotating the joint axes of a robot in turn and then use the measuring points to fit its axis equation. Based on the axis equation, two methods are used to establish the kinematics equation of the robot. The first method obtains: 1) the transformation matrix of the theoretical coordinate system of each axis relative to the base coordinate system; 2) the transformation matrix of the actual coordinate system of each axis relative to the base coordinate system based on the tiny error between the theoretical axis and the actual axis; 3) the six-variable adjacent transformation matrix. The second method is to directly use the modified denavit-hartenberg (MDH) method to obtain the adjacent transformation matrix of the actual robot. For the space intersecting axis, the coordinate system of the axis is determined by finding its common perpendicular line. For the parallel axis, the x-axis direction of the coordinate system of other axes is determined by the perpendicular line of the intersection point of the common perpendicular line of the intersecting axis to other axes. The comparison of the two methods finds that the first method cannot solve the zero deviation of each axis, but the second method can decouple the zero deviation and geometric parameters of each axis. The inverse kinematics equations of the two methods were solved with the Newton iterative method, and the calibration effects of the two methods were compared by using experiments and simulations. The trajectory accuracy of the two methods reaches −0.83 mm to +0.52 mm.
The axis rotation calibration method is to obtain the measuring points by rotating the joint axes of a robot in turn and then use the measuring points to fit its axis equation. Based on the axis equation, two methods are used to establish the kinematics equation of the robot. The first method obtains: 1) the transformation matrix of the theoretical coordinate system of each axis relative to the base coordinate system; 2) the transformation matrix of the actual coordinate system of each axis relative to the base coordinate system based on the tiny error between the theoretical axis and the actual axis; 3) the six-variable adjacent transformation matrix. The second method is to directly use the modified denavit-hartenberg (MDH) method to obtain the adjacent transformation matrix of the actual robot. For the space intersecting axis, the coordinate system of the axis is determined by finding its common perpendicular line. For the parallel axis, the x-axis direction of the coordinate system of other axes is determined by the perpendicular line of the intersection point of the common perpendicular line of the intersecting axis to other axes. The comparison of the two methods finds that the first method cannot solve the zero deviation of each axis, but the second method can decouple the zero deviation and geometric parameters of each axis. The inverse kinematics equations of the two methods were solved with the Newton iterative method, and the calibration effects of the two methods were compared by using experiments and simulations. The trajectory accuracy of the two methods reaches −0.83 mm to +0.52 mm.




2024, 43(5): 851-857.
doi: 10.13433/j.cnki.1003-8728.20220255
Abstract:
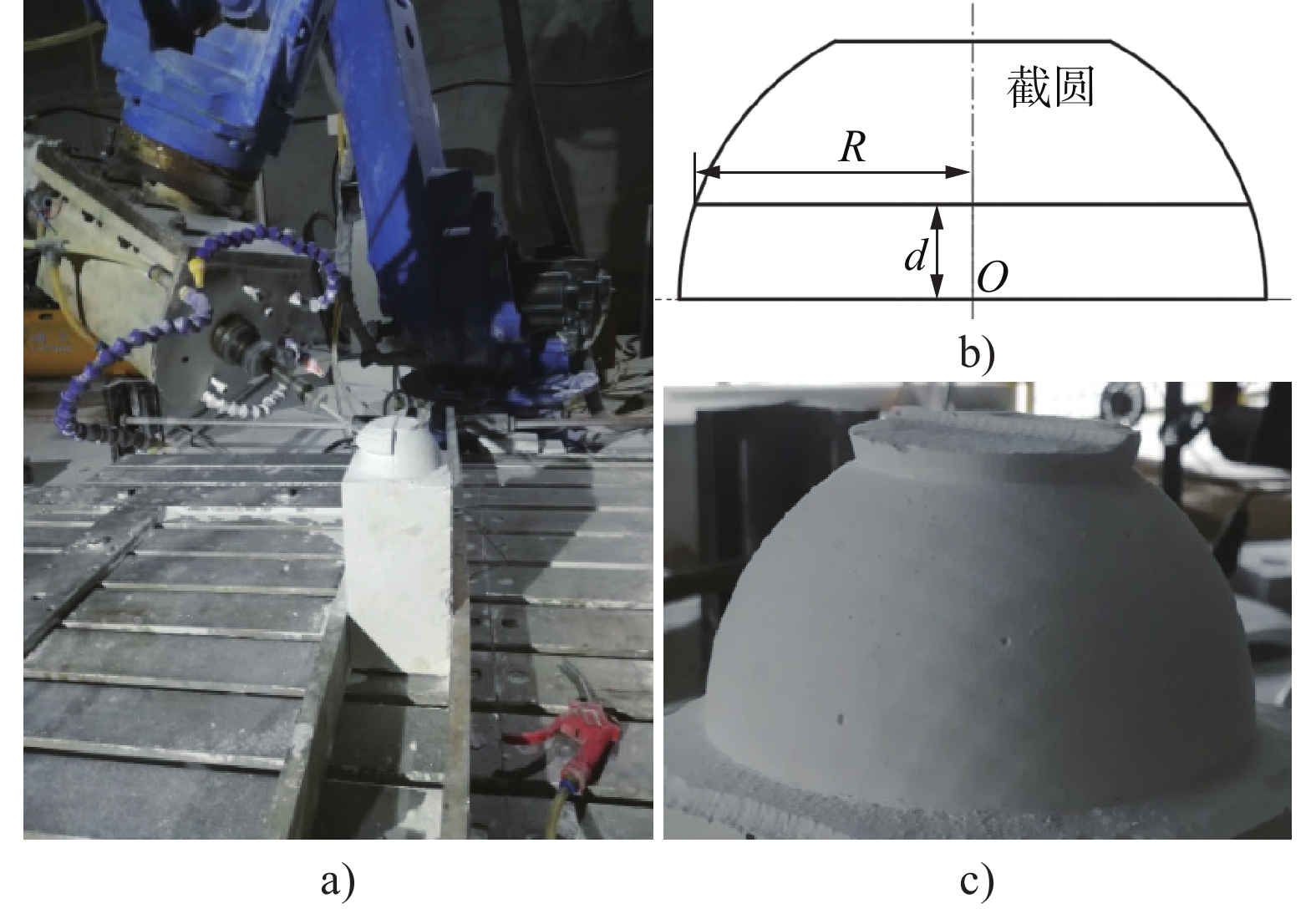
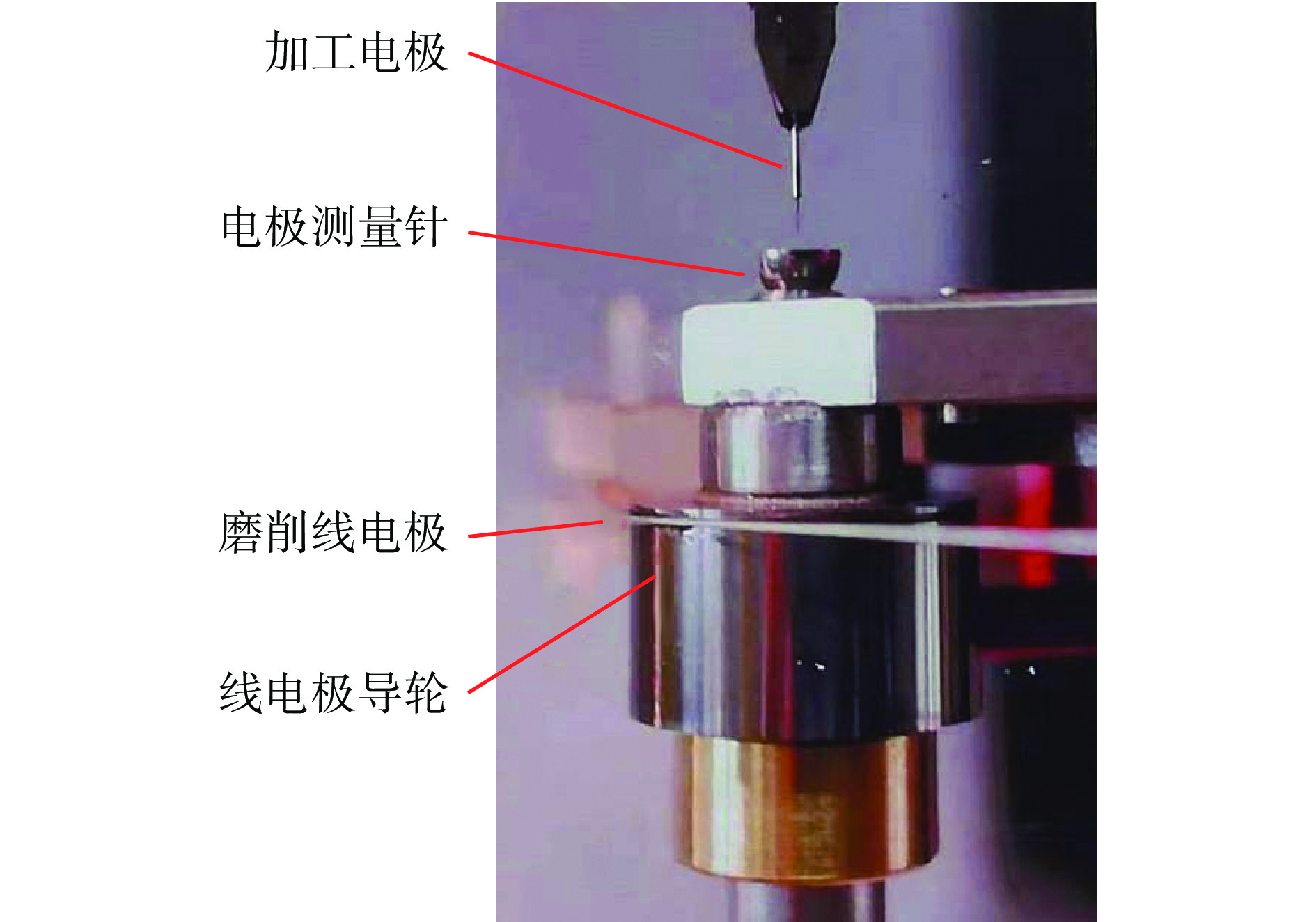
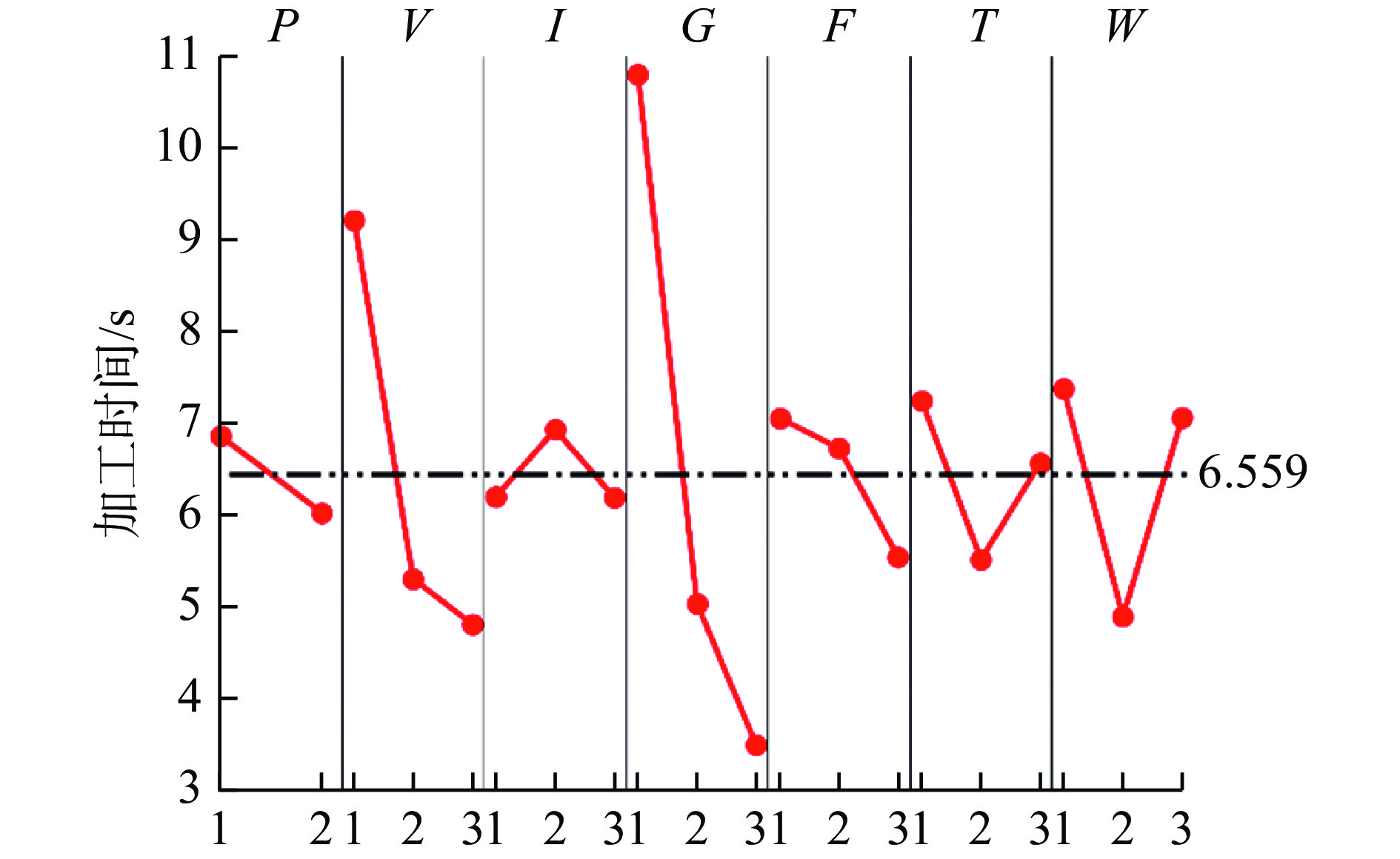
To study the effects of the processing parameters of Al2O3-TiC ceramics on the processing performance during electrical discharge machining (EDM), a mixed 2-3 level orthogonal test was designed, which was designed with polarity, inter-electrode voltage, maximum discharge current, gain, pulse frequency, pulse width, and discharging gap. Three kinds of target performance, including electrode length loss, electrode contour loss, material removal rate were selected. Through the range analysis, the effects of the processing parameters on the processing performance was obtained. Combining with analysis of variance, the polarity has a significant impact on the electrode loss; the inter electrode voltage and pulse current have a significant impact on the material removal rate. Taking the three factors into account, the optimal combination level of machining parameters is a negative processing polarity, electrode voltage of 130 V, peak current of 50 A, 45 gain, pulse frequency of 150 Hz, pulse width of 1.0 μs and discharging gap of 40 μm.
To study the effects of the processing parameters of Al2O3-TiC ceramics on the processing performance during electrical discharge machining (EDM), a mixed 2-3 level orthogonal test was designed, which was designed with polarity, inter-electrode voltage, maximum discharge current, gain, pulse frequency, pulse width, and discharging gap. Three kinds of target performance, including electrode length loss, electrode contour loss, material removal rate were selected. Through the range analysis, the effects of the processing parameters on the processing performance was obtained. Combining with analysis of variance, the polarity has a significant impact on the electrode loss; the inter electrode voltage and pulse current have a significant impact on the material removal rate. Taking the three factors into account, the optimal combination level of machining parameters is a negative processing polarity, electrode voltage of 130 V, peak current of 50 A, 45 gain, pulse frequency of 150 Hz, pulse width of 1.0 μs and discharging gap of 40 μm.






2024, 43(5): 858-864.
doi: 10.13433/j.cnki.1003-8728.20220265
Abstract:
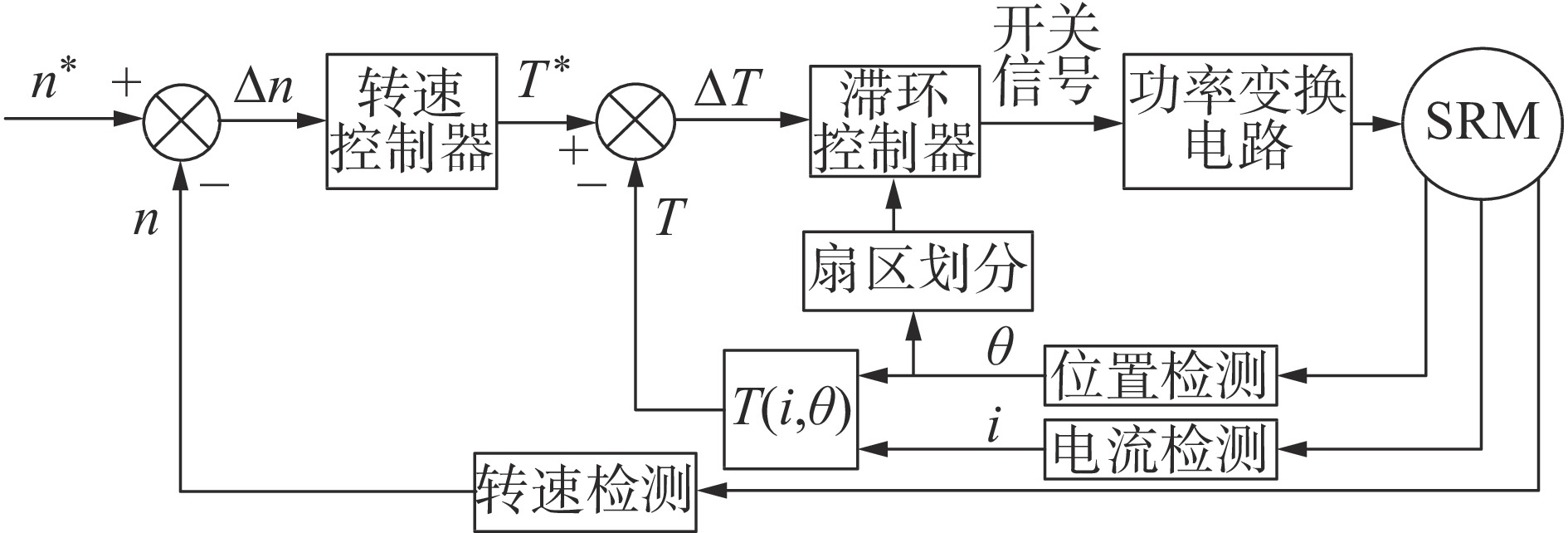
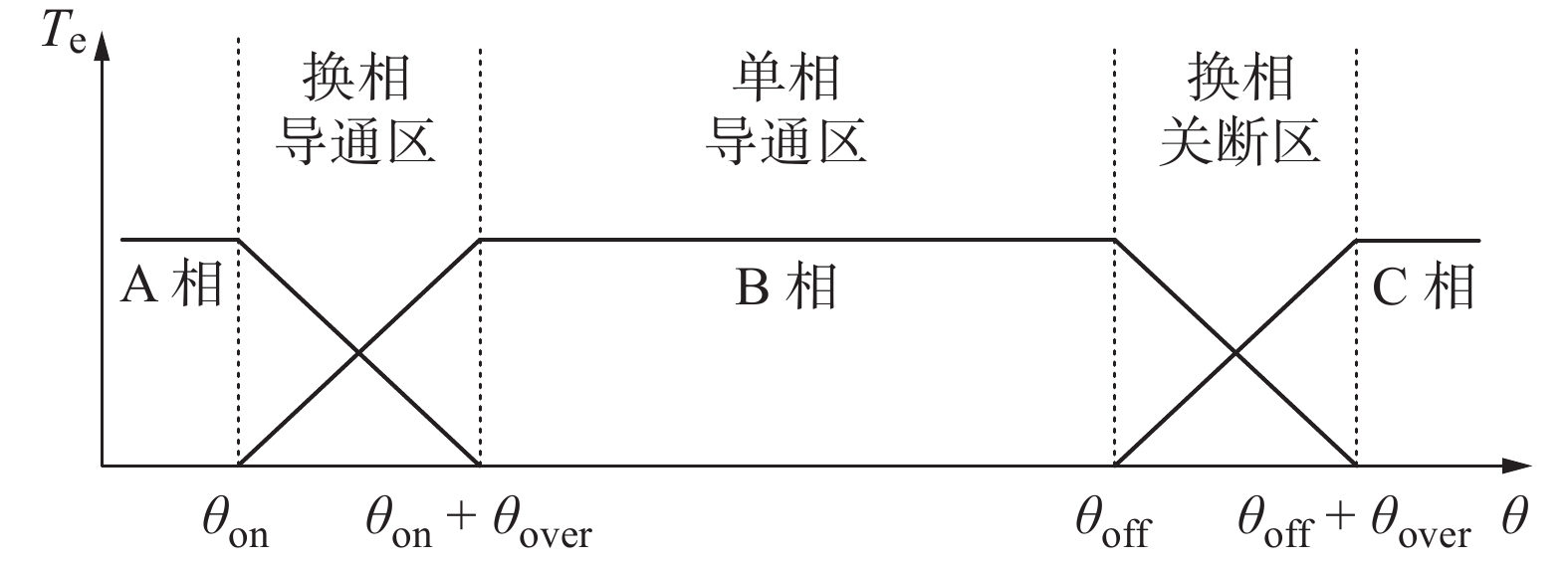
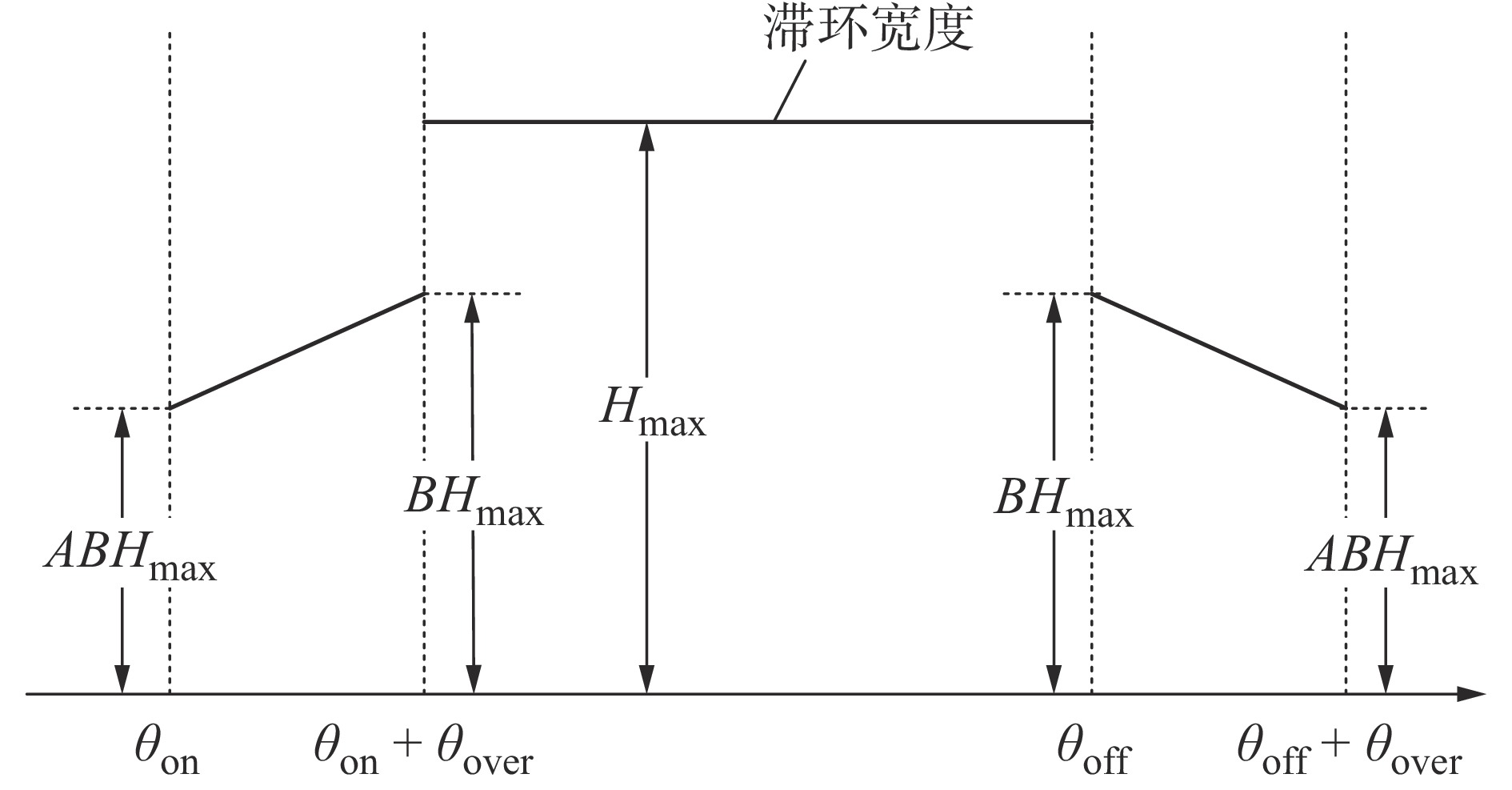
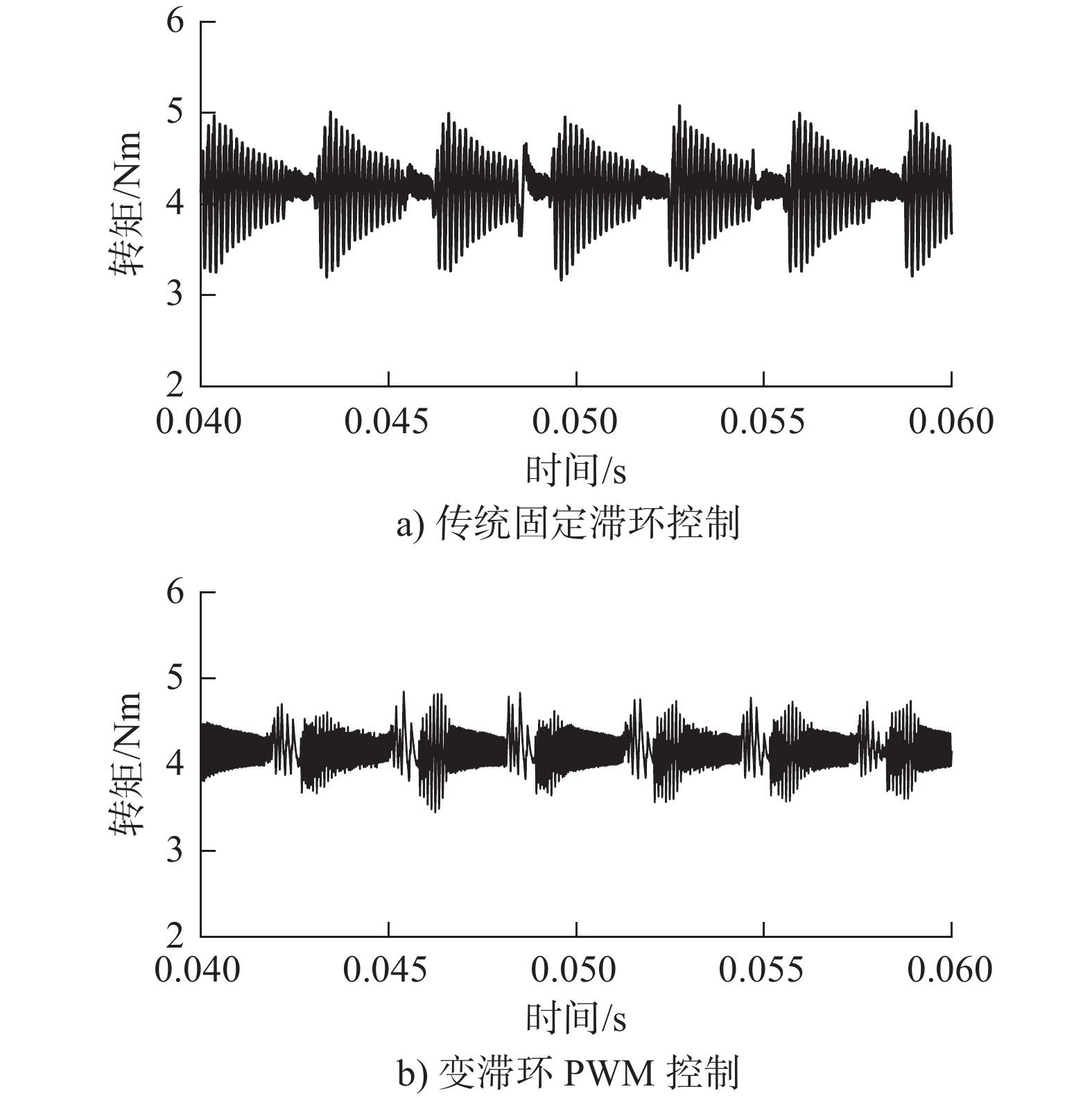
For the traditional switched reluctance motors (SRM) which are based on direct instantaneous torque control method, it is easy to have the problem of torque ripple when controlled by fixed hysteresis control method. To solve this problem, a new direct instantaneous torque control method based on variable hysteresis PWM is proposed. Firstly, the operation intervals of the SRM are determined, and then the hysteresis functions for each interval are set up and optimized. After that, based on the optimized hysteresis function , the current rotor position angle, and the corresponding torque deviation, a variable hysteresis PWM control method is proposed to control the switches of the power conversion circuit, so that the torque ripple is able to gets suppressed. Finally, simulations were conducted to verify the effectiveness of this method, and comparative analysis with the traditional fixed hysteresis-based direct instantaneous torque control method was also performed. Results show that the new method have huge application value. It can not only significantly reduce the torque ripple of the SRM, but also effectively improves its operational efficiency.
For the traditional switched reluctance motors (SRM) which are based on direct instantaneous torque control method, it is easy to have the problem of torque ripple when controlled by fixed hysteresis control method. To solve this problem, a new direct instantaneous torque control method based on variable hysteresis PWM is proposed. Firstly, the operation intervals of the SRM are determined, and then the hysteresis functions for each interval are set up and optimized. After that, based on the optimized hysteresis function , the current rotor position angle, and the corresponding torque deviation, a variable hysteresis PWM control method is proposed to control the switches of the power conversion circuit, so that the torque ripple is able to gets suppressed. Finally, simulations were conducted to verify the effectiveness of this method, and comparative analysis with the traditional fixed hysteresis-based direct instantaneous torque control method was also performed. Results show that the new method have huge application value. It can not only significantly reduce the torque ripple of the SRM, but also effectively improves its operational efficiency.




2024, 43(5): 865-873.
doi: 10.13433/j.cnki.1003-8728.20220298
Abstract:
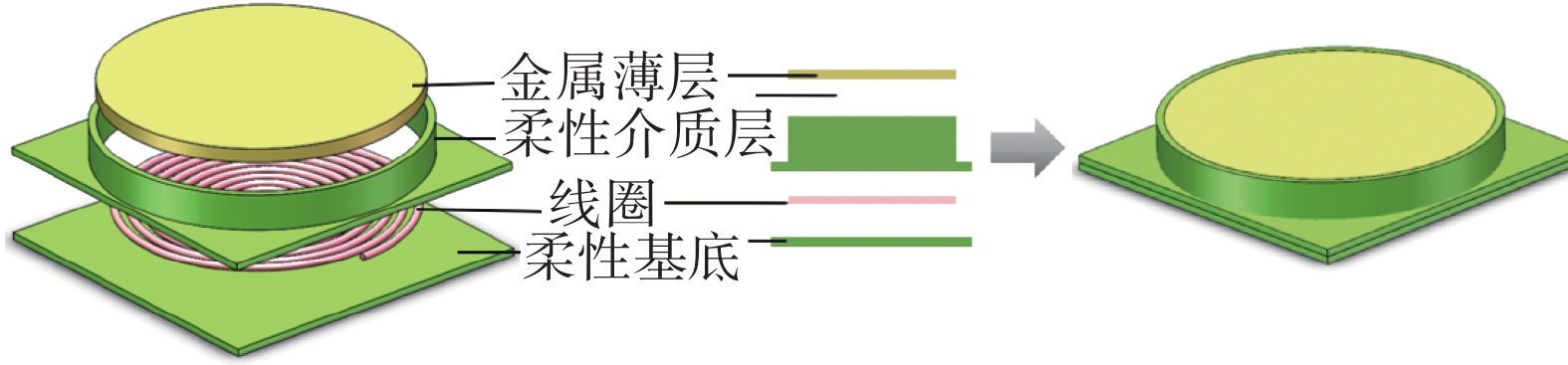
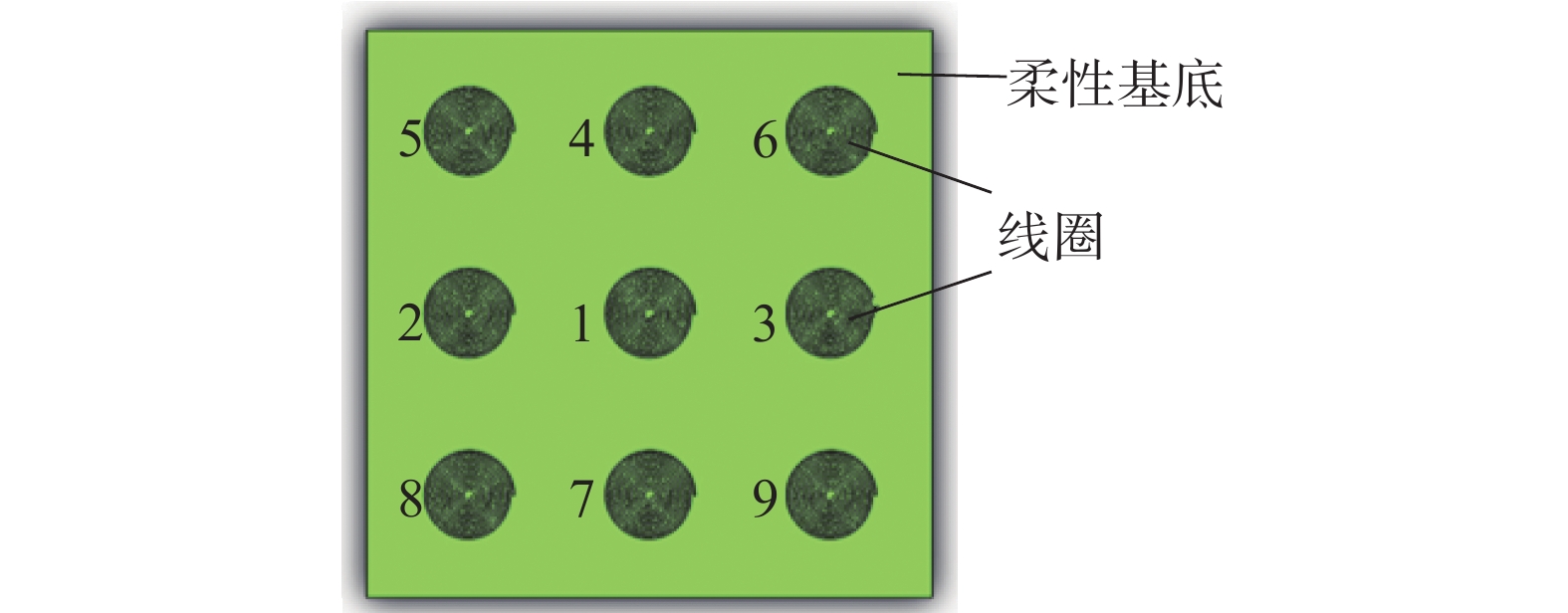
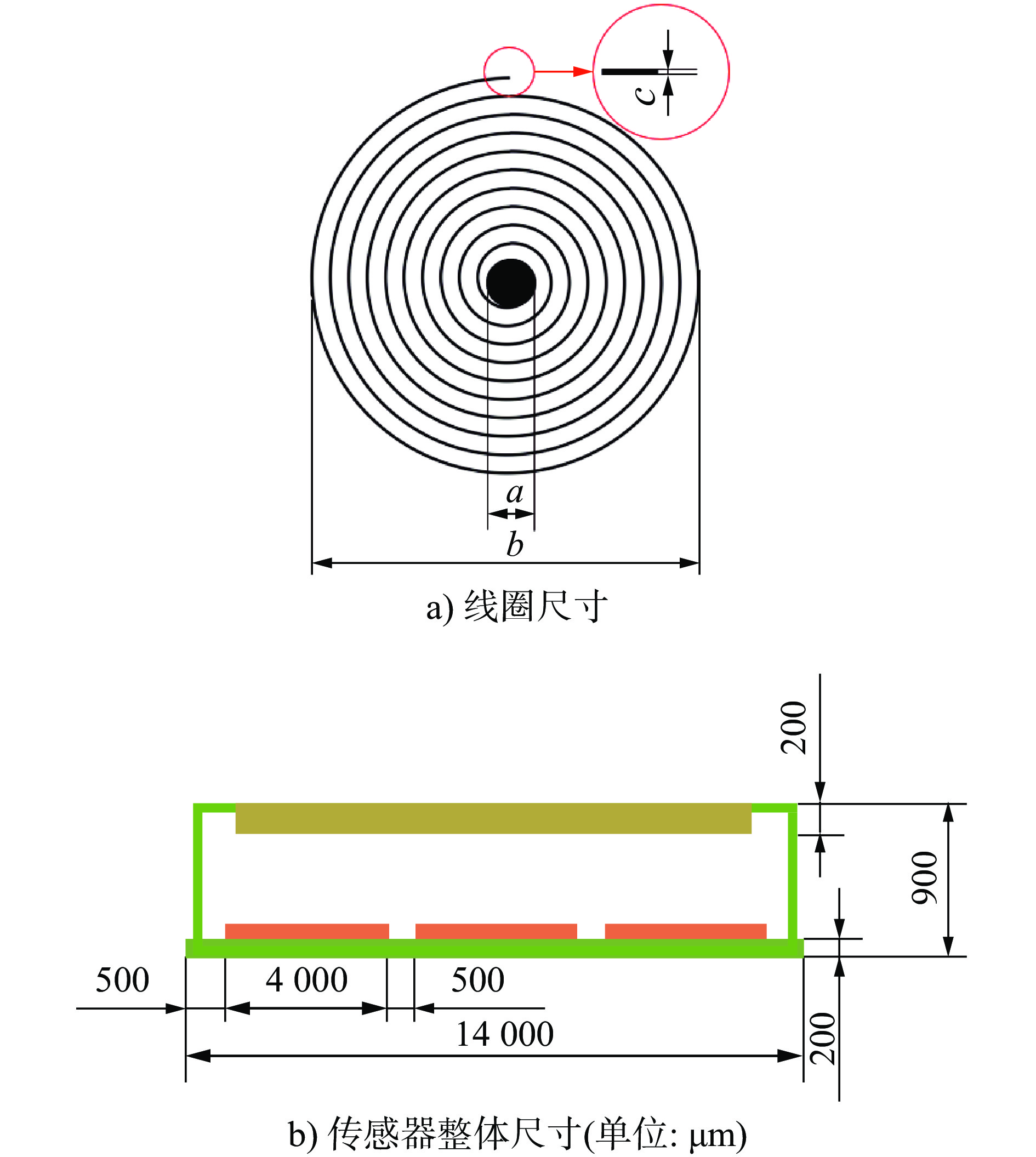
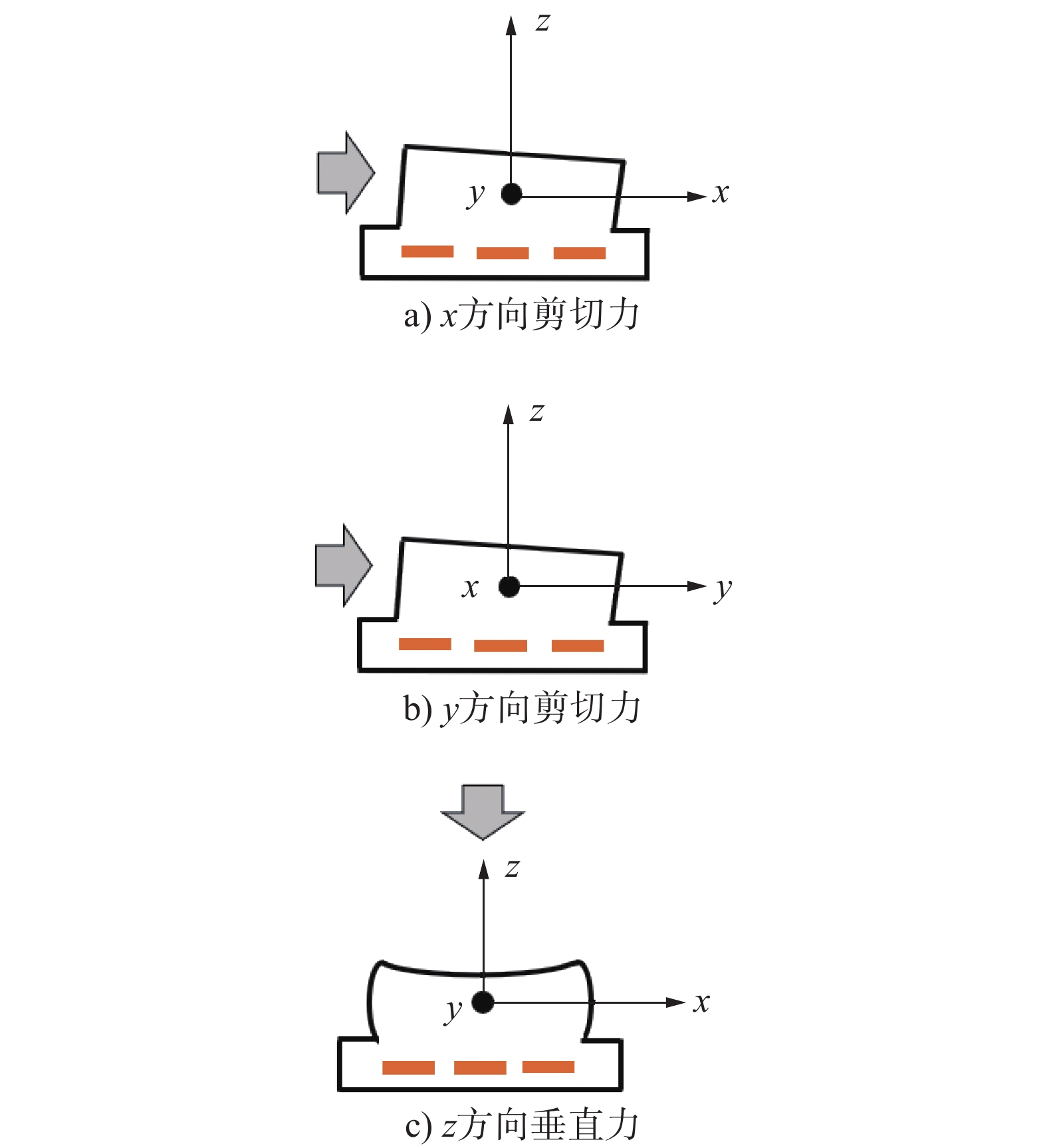
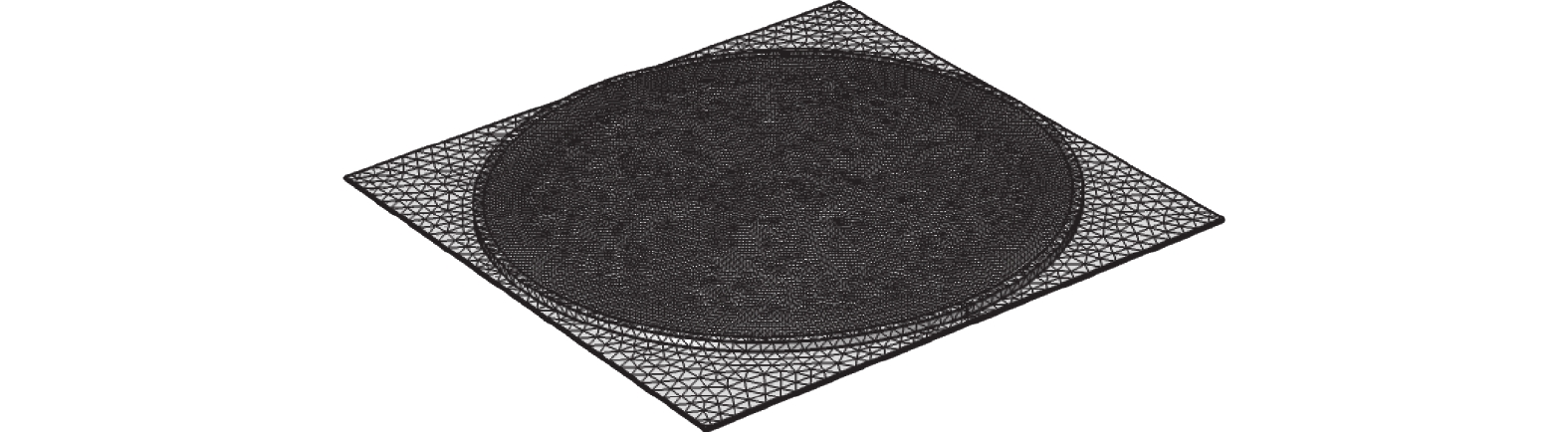
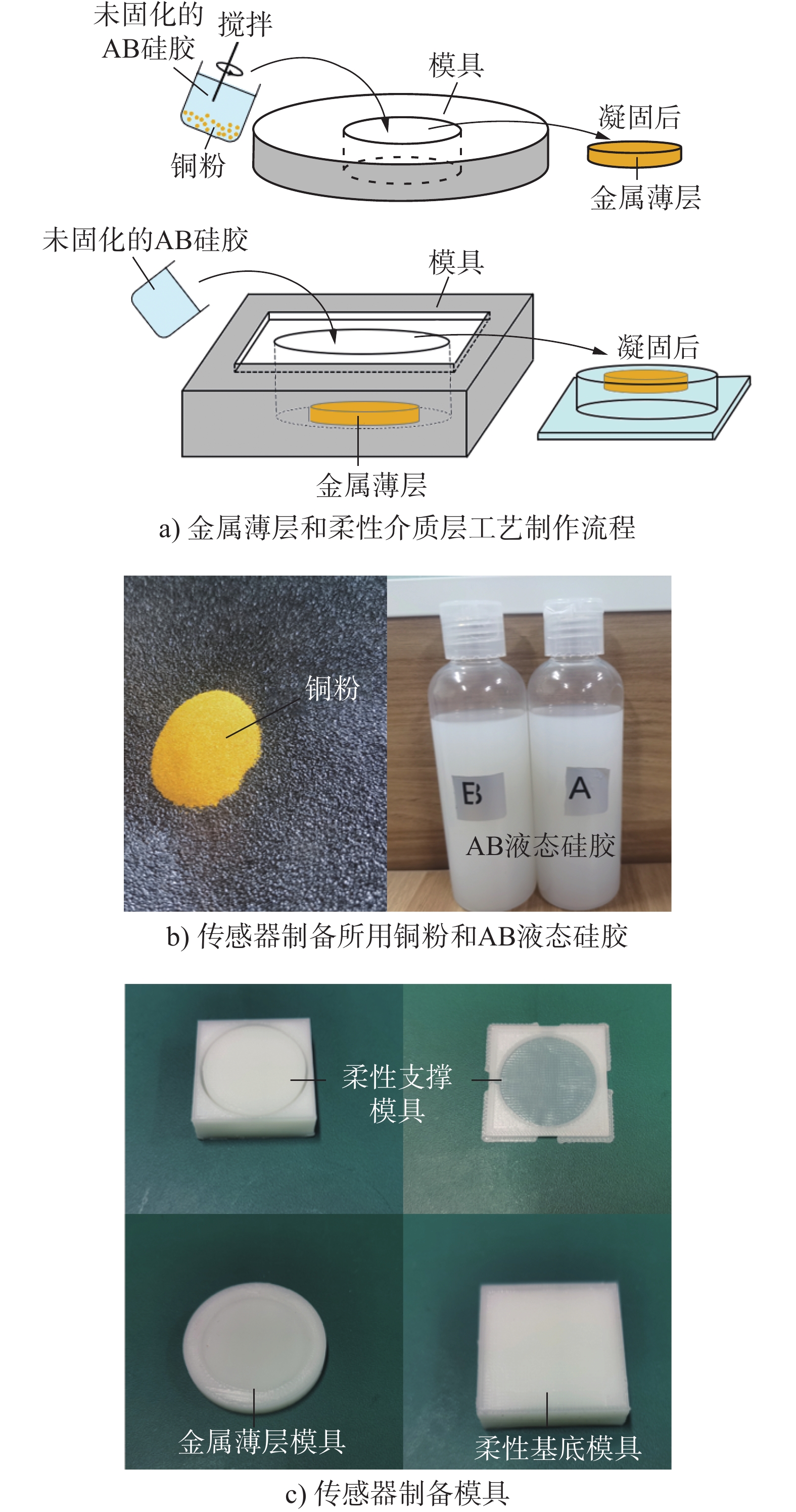
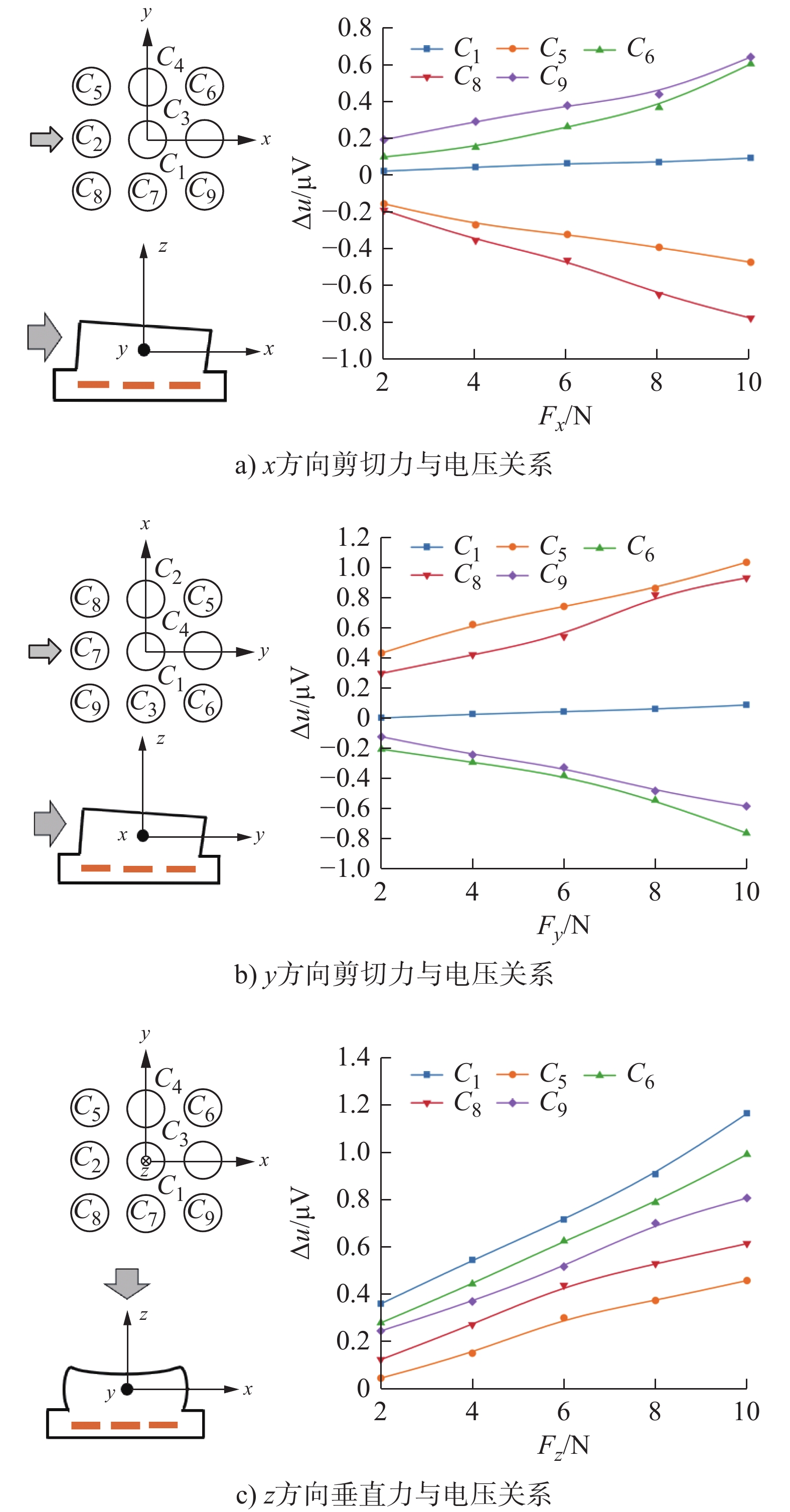
Based on the principle of eddy current, a flexible tactile sensor which can detect three-dimensional force is designed. The sensor structure uses a combination of multi-coil arrays and flexible materials. The external force deforms the flexible material, which changes the distance between the thin metal layer and the coils, and then changes the induced voltage of each coil. Through the relationship between the external force and the induced voltage, the corresponding characteristic function is established to judge the direction and magnitude of the external force. According to the designed structure, the manufacturing process to prepare the sensor is determined. After a series of experiments, the output characteristics of the sensor were tested. These results show that the designed sensor has the three-dimensional sensing capability, which meets the requirement of the robot's flexible tactile sensing and the measurement of three-dimensional force.
Based on the principle of eddy current, a flexible tactile sensor which can detect three-dimensional force is designed. The sensor structure uses a combination of multi-coil arrays and flexible materials. The external force deforms the flexible material, which changes the distance between the thin metal layer and the coils, and then changes the induced voltage of each coil. Through the relationship between the external force and the induced voltage, the corresponding characteristic function is established to judge the direction and magnitude of the external force. According to the designed structure, the manufacturing process to prepare the sensor is determined. After a series of experiments, the output characteristics of the sensor were tested. These results show that the designed sensor has the three-dimensional sensing capability, which meets the requirement of the robot's flexible tactile sensing and the measurement of three-dimensional force.








2024, 43(5): 874-881.
doi: 10.13433/j.cnki.1003-8728.20220275
Abstract:
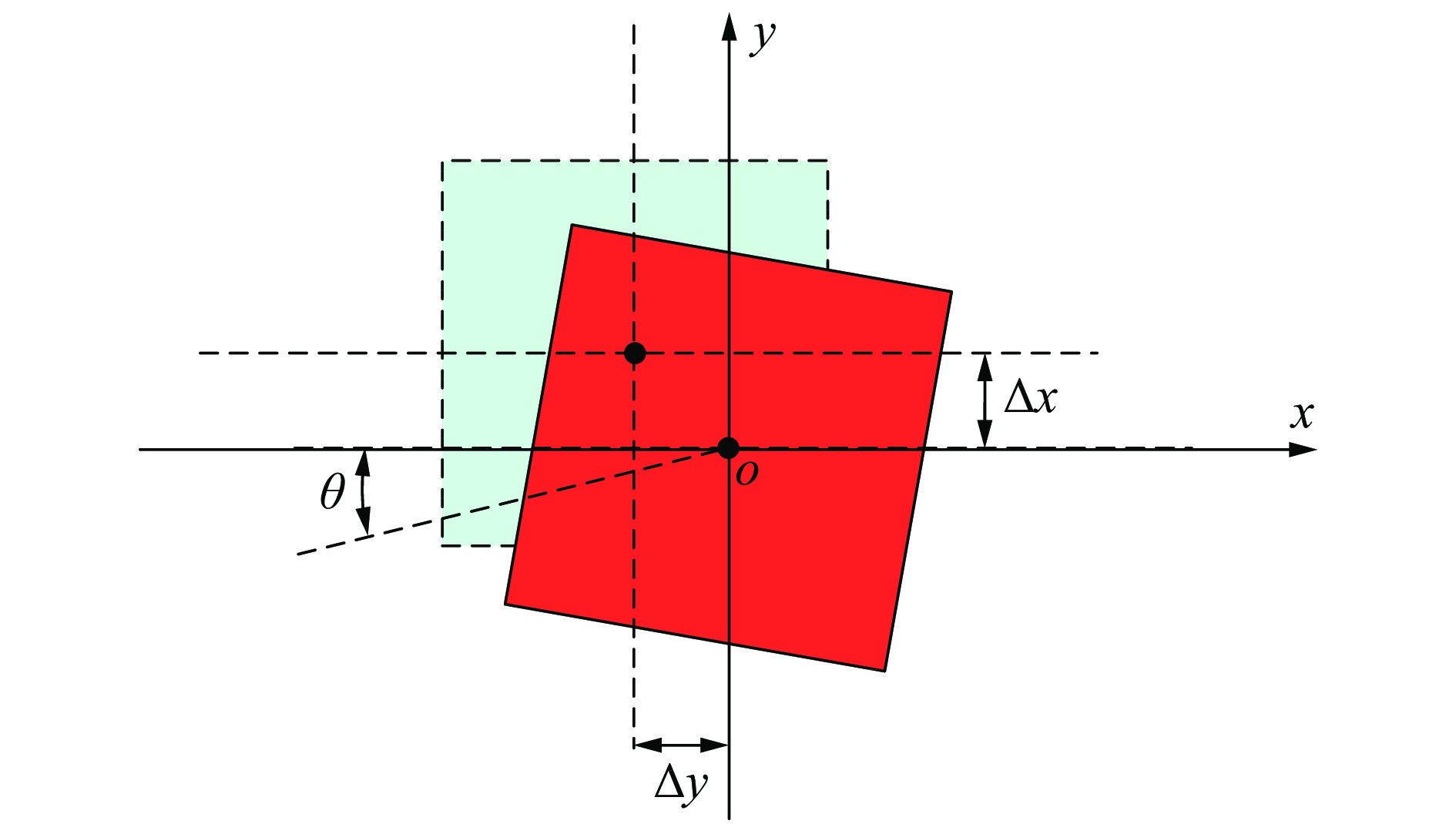
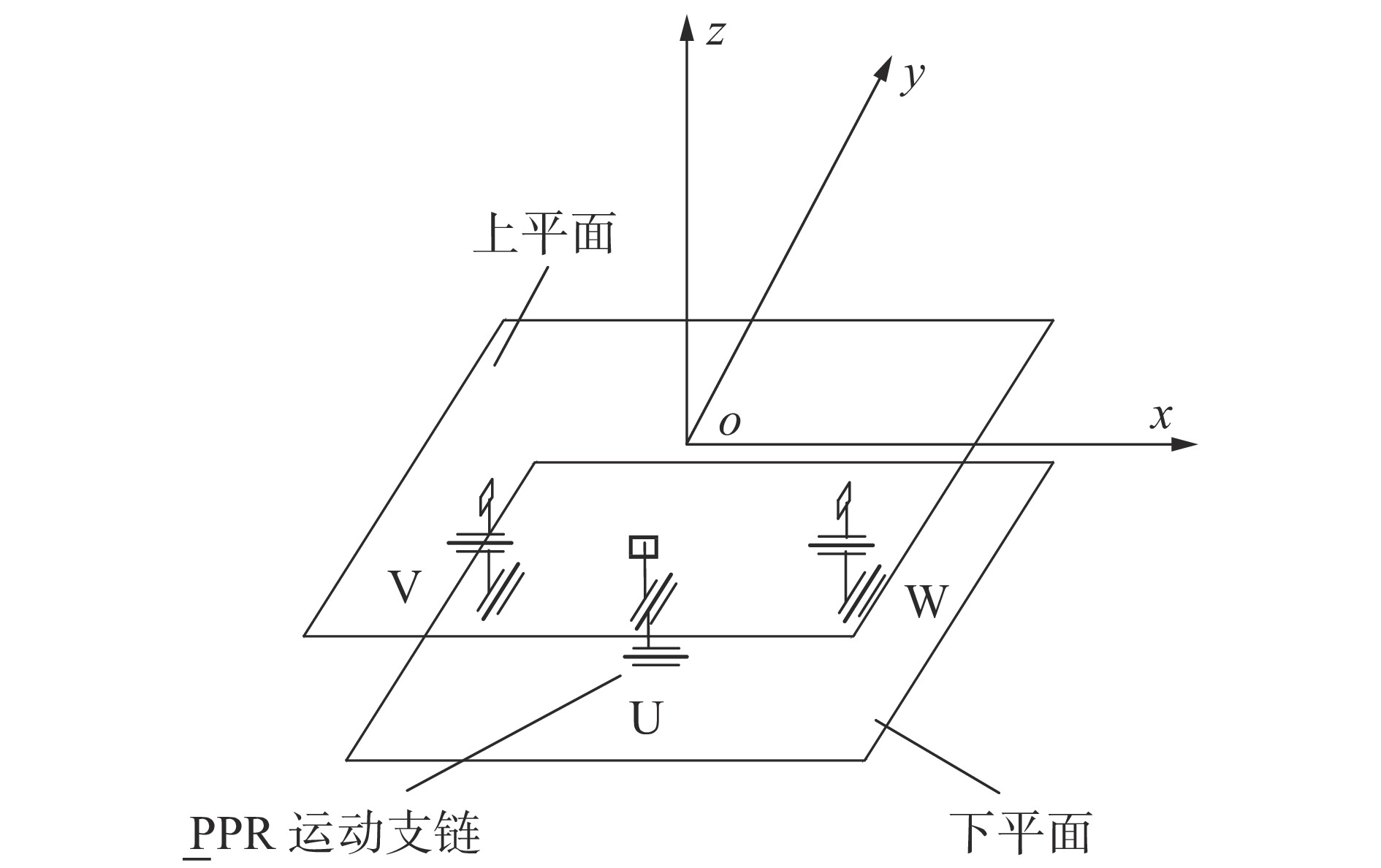
The kinematic analysis of a UVW alignment platform was carried out to control its uniform motion, and its trajectory planning scheme was designed to solve the speed reduction problem. Firstly, a two-dimensional plane model of the alignment platform was established based on the degrees of freedom. The positive and negative positional solution formulas were solved. The singular bit shape was analyzed, and a three-dimensional workspace was constructed. Then, the motion trajectory was analyzed with the commonly used synchronous constant velocity method. The scatter plot of the motion trajectory shows that when the absolute value of the rotation angle |θ| increases to 15°, the ratio of the end velocity of the platform motion to the initial velocity decreases to 0.935, indicating that the |θ| increase may reduce the platform motion velocity. Finally, through combining the platform’s degrees of freedom with the velocity variation law, the equal angular velocity instantaneous centre method was designed. The comparison results show that the use of the equal angular velocity instantaneous center method makes the motion velocity of the platform constant and eliminates the speed reduction caused by the rotation angle θ.
The kinematic analysis of a UVW alignment platform was carried out to control its uniform motion, and its trajectory planning scheme was designed to solve the speed reduction problem. Firstly, a two-dimensional plane model of the alignment platform was established based on the degrees of freedom. The positive and negative positional solution formulas were solved. The singular bit shape was analyzed, and a three-dimensional workspace was constructed. Then, the motion trajectory was analyzed with the commonly used synchronous constant velocity method. The scatter plot of the motion trajectory shows that when the absolute value of the rotation angle |θ| increases to 15°, the ratio of the end velocity of the platform motion to the initial velocity decreases to 0.935, indicating that the |θ| increase may reduce the platform motion velocity. Finally, through combining the platform’s degrees of freedom with the velocity variation law, the equal angular velocity instantaneous centre method was designed. The comparison results show that the use of the equal angular velocity instantaneous center method makes the motion velocity of the platform constant and eliminates the speed reduction caused by the rotation angle θ.






2024, 43(5): 882-890.
doi: 10.13433/j.cnki.1003-8728.20220249
Abstract:
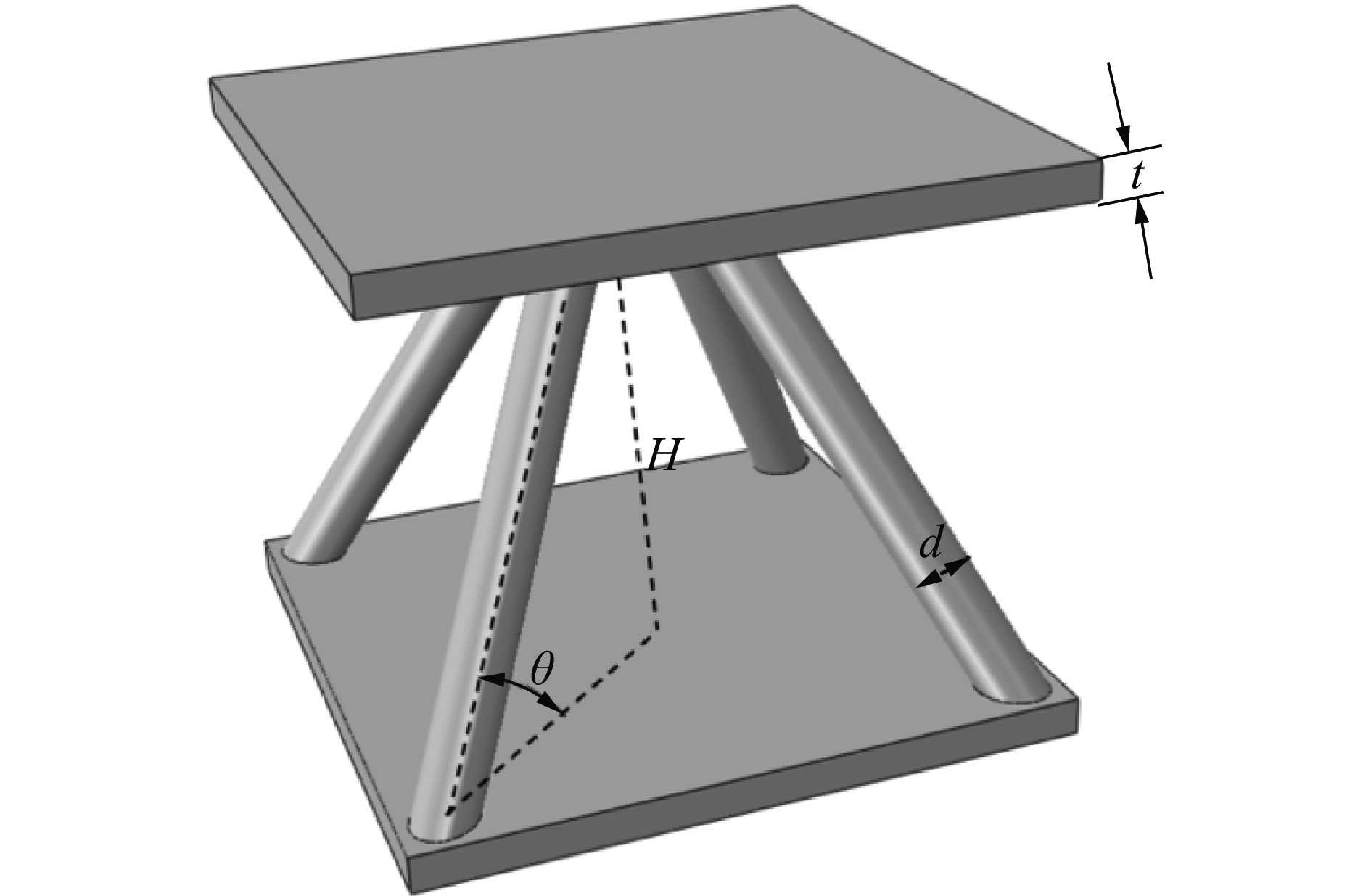
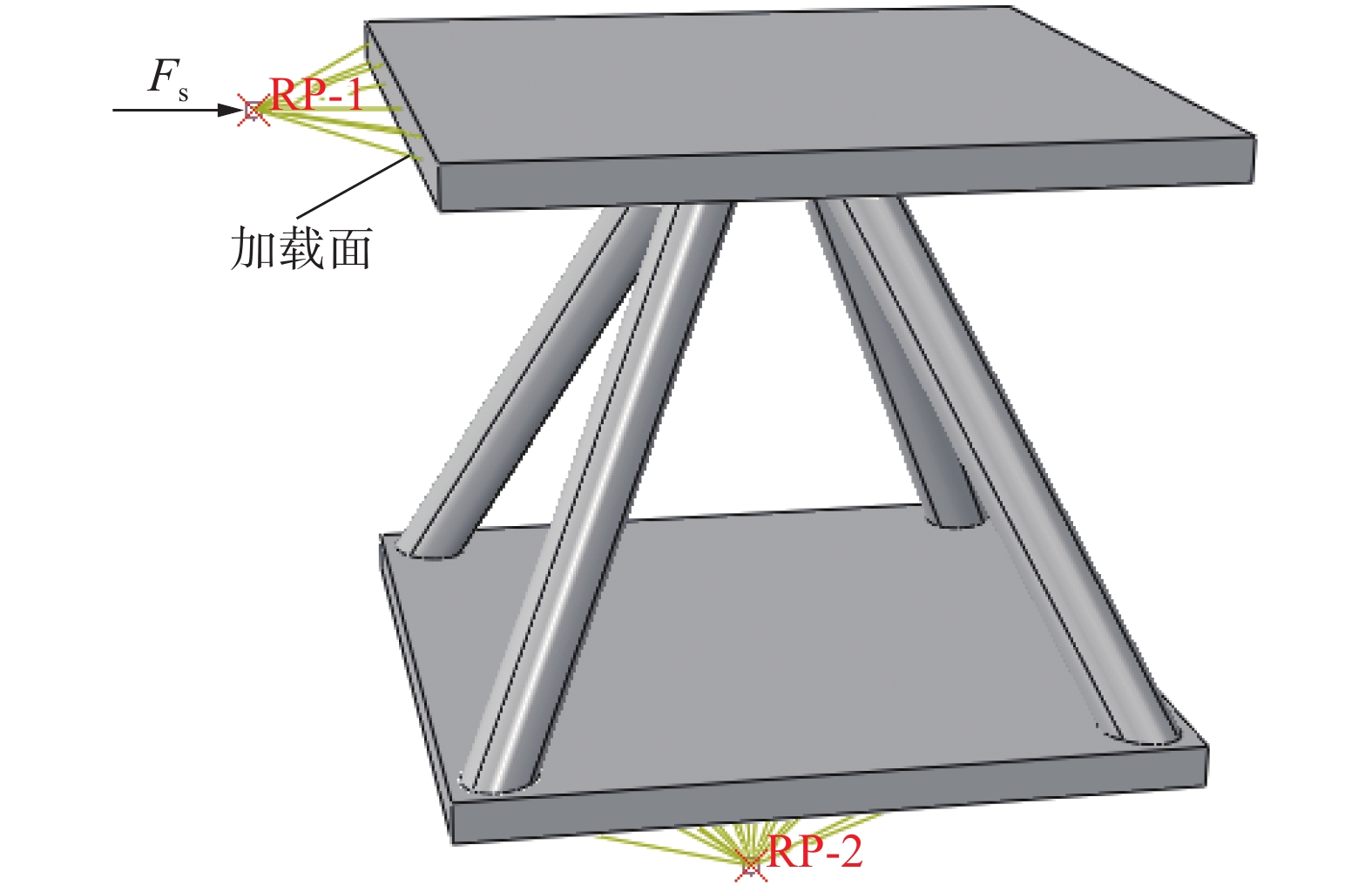
In this study, the genetic algorithm (GA) and response surface method (RSM) are used to optimize structural parameters multi-objectively to maximize the ultimate specific uniaxial compression and specific pure shearing bearing capacity of pyramid lattice elements. The optimization result is verified by finite element simulation and experiment. The results show that the prediction results of the optimal structure based on the genetic algorithm are 30.1% and 91.6% higher than those of the conventional structure for the ultimate uniaxial compression and pure shearing bearing capacity, respectively. The finite element analysis results of the optimized structure are 39.7% and 90.5% higher than those of the conventional structure for the uniaxial compression and pure shearing bearing capacity, respectively. The experimental result of the optimal structure is 44% higher than that of the conventional structure for the ultimate uniaxial compression bearing capacity. The ability of the proposed optimization method was verified by both the finite element analysis and experiment and it can be applied in the design of lattice structures.
In this study, the genetic algorithm (GA) and response surface method (RSM) are used to optimize structural parameters multi-objectively to maximize the ultimate specific uniaxial compression and specific pure shearing bearing capacity of pyramid lattice elements. The optimization result is verified by finite element simulation and experiment. The results show that the prediction results of the optimal structure based on the genetic algorithm are 30.1% and 91.6% higher than those of the conventional structure for the ultimate uniaxial compression and pure shearing bearing capacity, respectively. The finite element analysis results of the optimized structure are 39.7% and 90.5% higher than those of the conventional structure for the uniaxial compression and pure shearing bearing capacity, respectively. The experimental result of the optimal structure is 44% higher than that of the conventional structure for the ultimate uniaxial compression bearing capacity. The ability of the proposed optimization method was verified by both the finite element analysis and experiment and it can be applied in the design of lattice structures.







2024, 43(5): 891-896.
doi: 10.13433/j.cnki.1003-8728.20240056
Abstract:
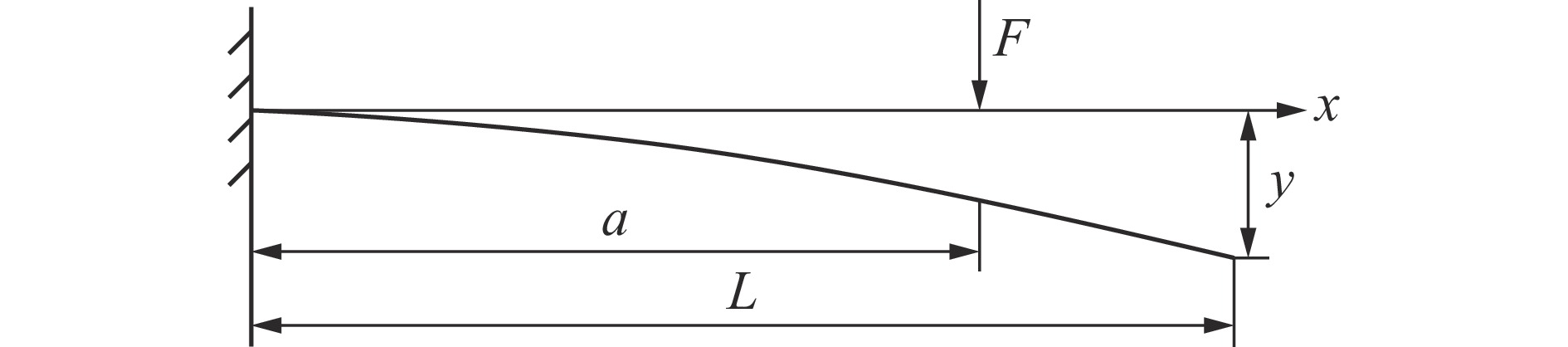
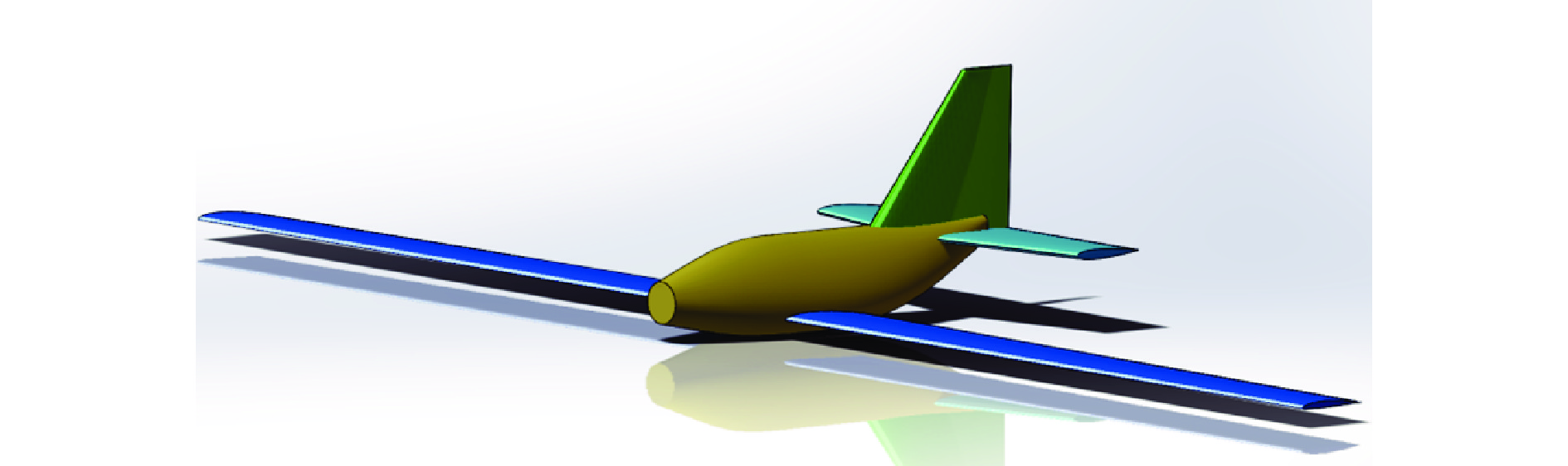
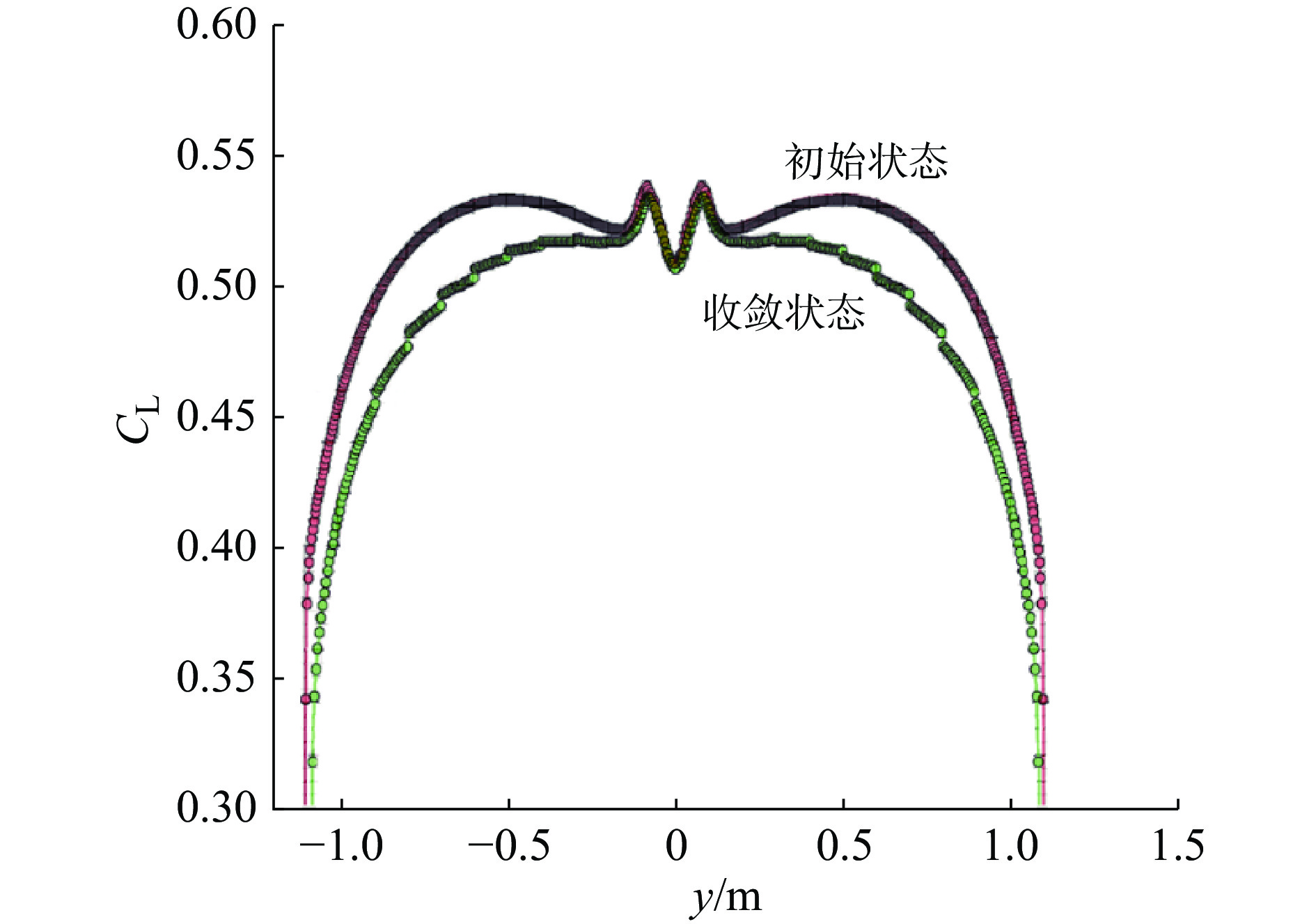
Flexible wings with large aspect ratio undergo elastic deformation under aerodynamic loads, resulting in changes of wing's aerodynamic characteristics. Therefore, in the preliminary design stage, it is expected to adopt a fast and efficient calculation method to study the redistribution of wing's aerodynamic load under static aeroelastic equilibrium. This work provides an efficient analysis method to solve the static aeroelastic deformation and the corresponding aerodynamic load, in which a loose coupling strategy is adopted, assuming that the angle of attack is unchanged. The undeformed load is first applied on the wing structure, the structural deformation is calculated, and then the aerodynamic load redistribution is calculated from the deformed aerodynamic shape. The final aeroelastic load distribution and aerodynamic characteristics of the wing are obtained by iterating repeatedly until the deformation/load converged. The feasibility of the method is demonstrated by a large aspect ratio elastic model aircraft.
Flexible wings with large aspect ratio undergo elastic deformation under aerodynamic loads, resulting in changes of wing's aerodynamic characteristics. Therefore, in the preliminary design stage, it is expected to adopt a fast and efficient calculation method to study the redistribution of wing's aerodynamic load under static aeroelastic equilibrium. This work provides an efficient analysis method to solve the static aeroelastic deformation and the corresponding aerodynamic load, in which a loose coupling strategy is adopted, assuming that the angle of attack is unchanged. The undeformed load is first applied on the wing structure, the structural deformation is calculated, and then the aerodynamic load redistribution is calculated from the deformed aerodynamic shape. The final aeroelastic load distribution and aerodynamic characteristics of the wing are obtained by iterating repeatedly until the deformation/load converged. The feasibility of the method is demonstrated by a large aspect ratio elastic model aircraft.




2024, 43(5): 897-903.
doi: 10.13433/j.cnki.1003-8728.20220280
Abstract:
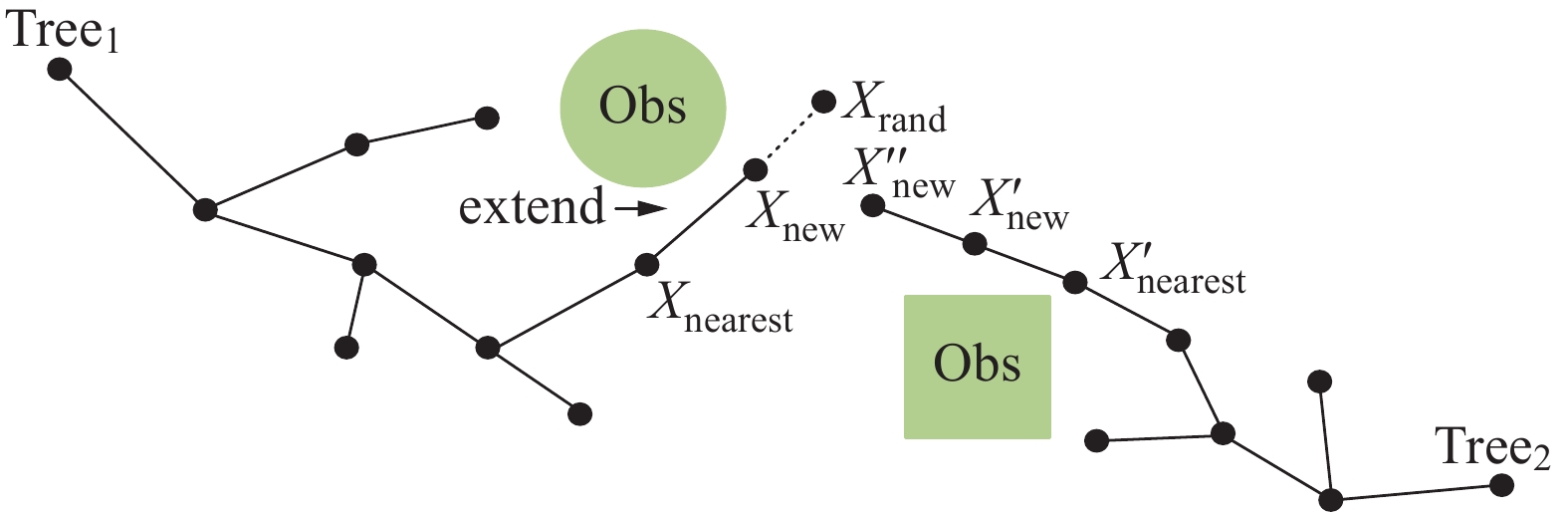
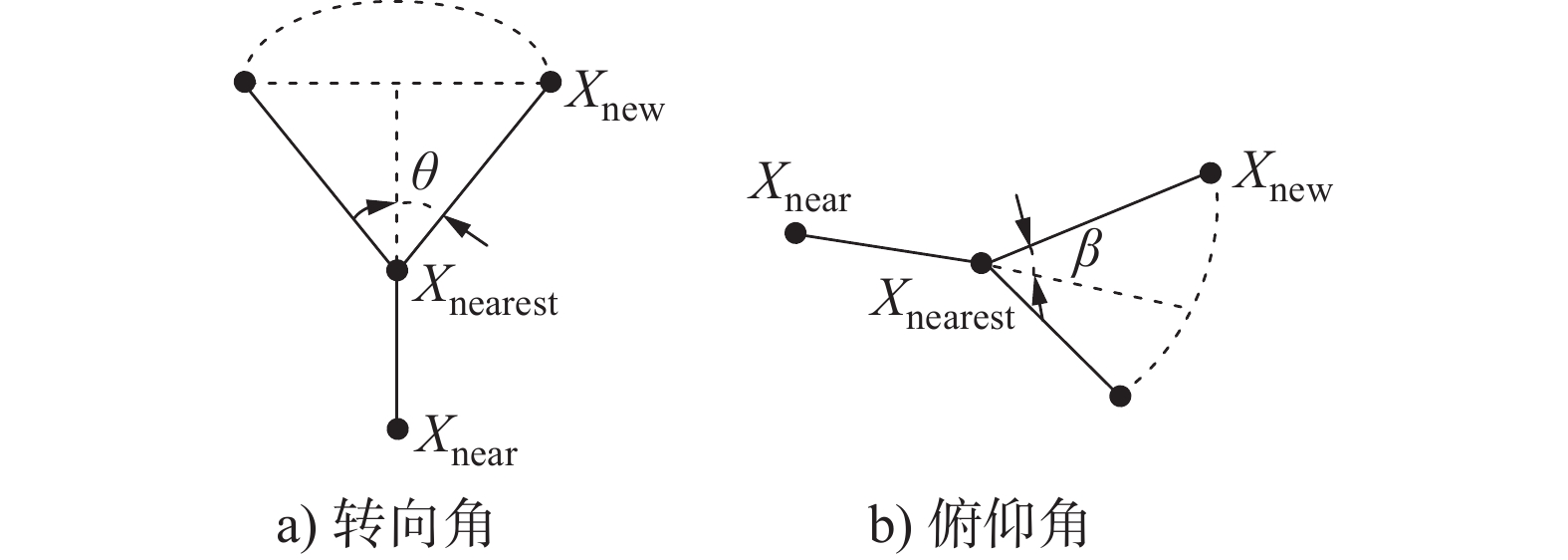
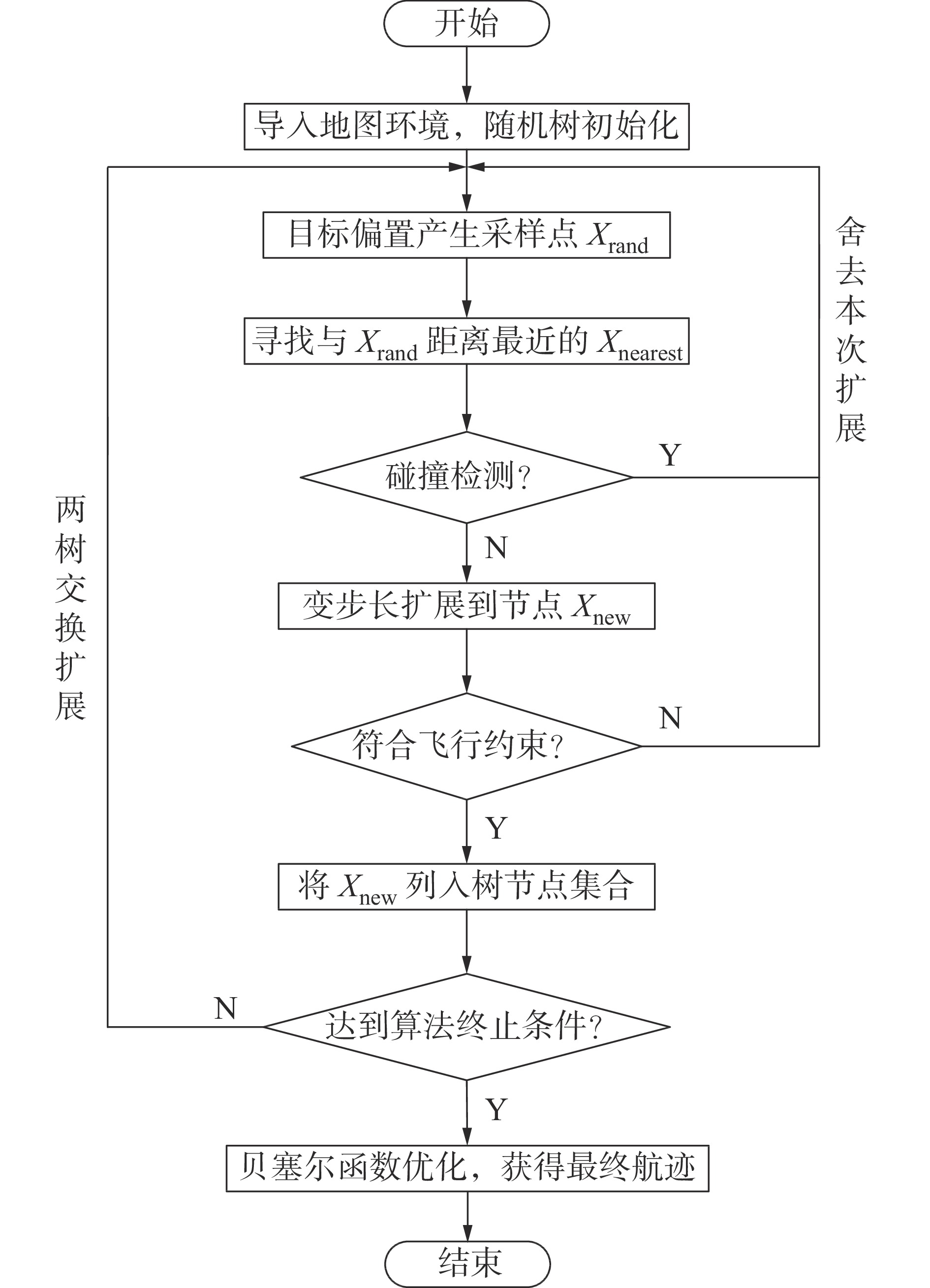
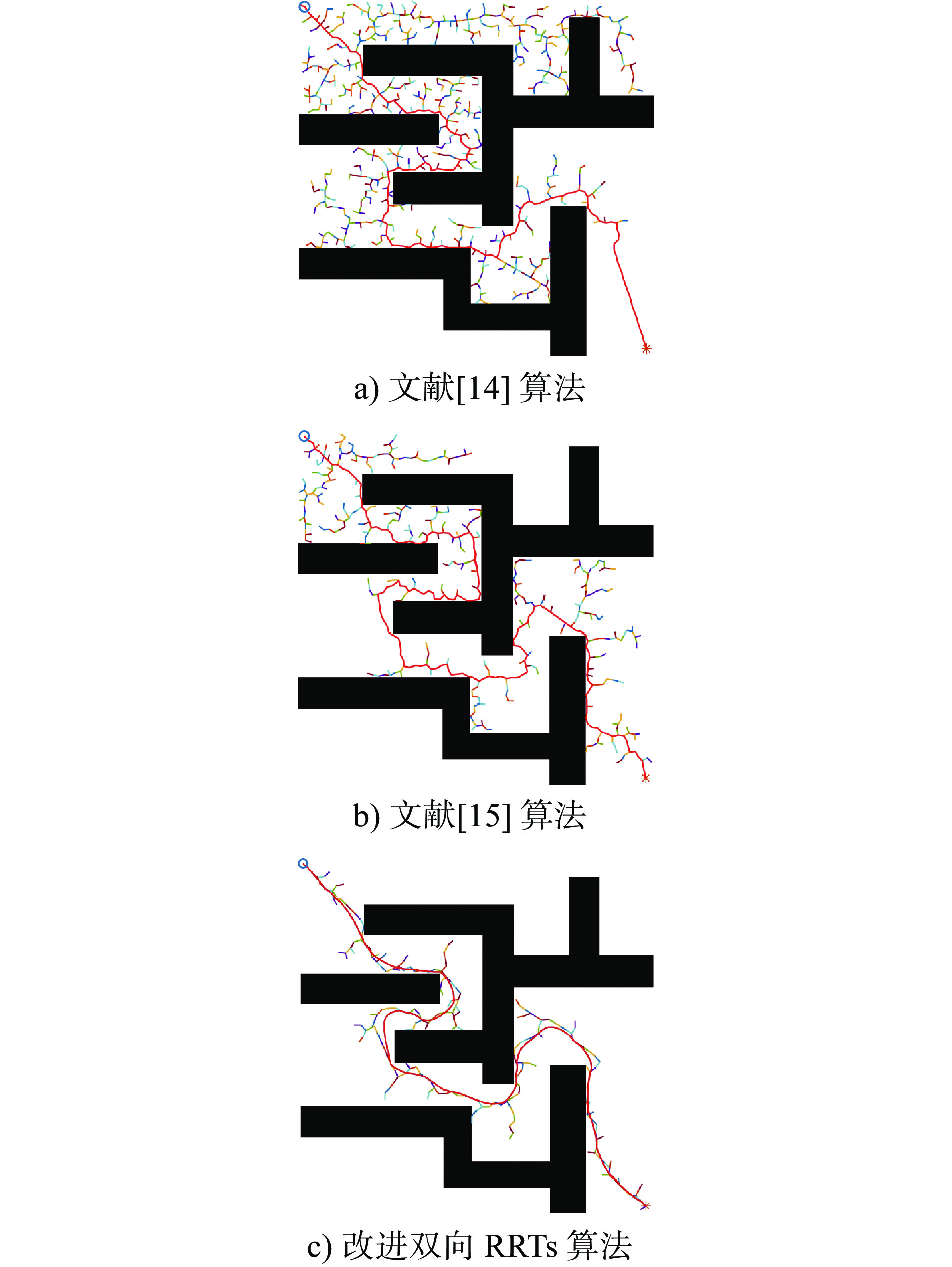
Aiming at the global path planning problem of UAV in complex environment, an improved bidirectional RRTs algorithm is proposed by combining the artificial potential field method with bidirectional RRTs algorithm. Firstly, the target offset strategy guides the sampling points to be generated along the target points with a certain probability. At the same time, the new nodes of the random tree are affected by the combined force of obstacle repulsion and target point gravity to effectively avoid the growth of obstacles and improve the track search efficiency. Secondly, the constraints of UAV flight performance are considered for the node expansion of the random tree. Finally, the third-order Bessel function is used to further optimize the flight track. The simulation results show that compared with the traditional RRT and two-way RRTs algorithms, the improved two-way RRTs algorithm in two-dimensional and three-dimensional complex environment reduces the track search time by 71.3%, 24.7%, 41.0% and 18.6% respectively, which verifies the rapidity and effectiveness of the global search ability of the improved algorithm and it can be well applied to the off-line global path planning of UAV.
Aiming at the global path planning problem of UAV in complex environment, an improved bidirectional RRTs algorithm is proposed by combining the artificial potential field method with bidirectional RRTs algorithm. Firstly, the target offset strategy guides the sampling points to be generated along the target points with a certain probability. At the same time, the new nodes of the random tree are affected by the combined force of obstacle repulsion and target point gravity to effectively avoid the growth of obstacles and improve the track search efficiency. Secondly, the constraints of UAV flight performance are considered for the node expansion of the random tree. Finally, the third-order Bessel function is used to further optimize the flight track. The simulation results show that compared with the traditional RRT and two-way RRTs algorithms, the improved two-way RRTs algorithm in two-dimensional and three-dimensional complex environment reduces the track search time by 71.3%, 24.7%, 41.0% and 18.6% respectively, which verifies the rapidity and effectiveness of the global search ability of the improved algorithm and it can be well applied to the off-line global path planning of UAV.





2024, 43(5): 904-910.
doi: 10.13433/j.cnki.1003-8728.20220261
Abstract:
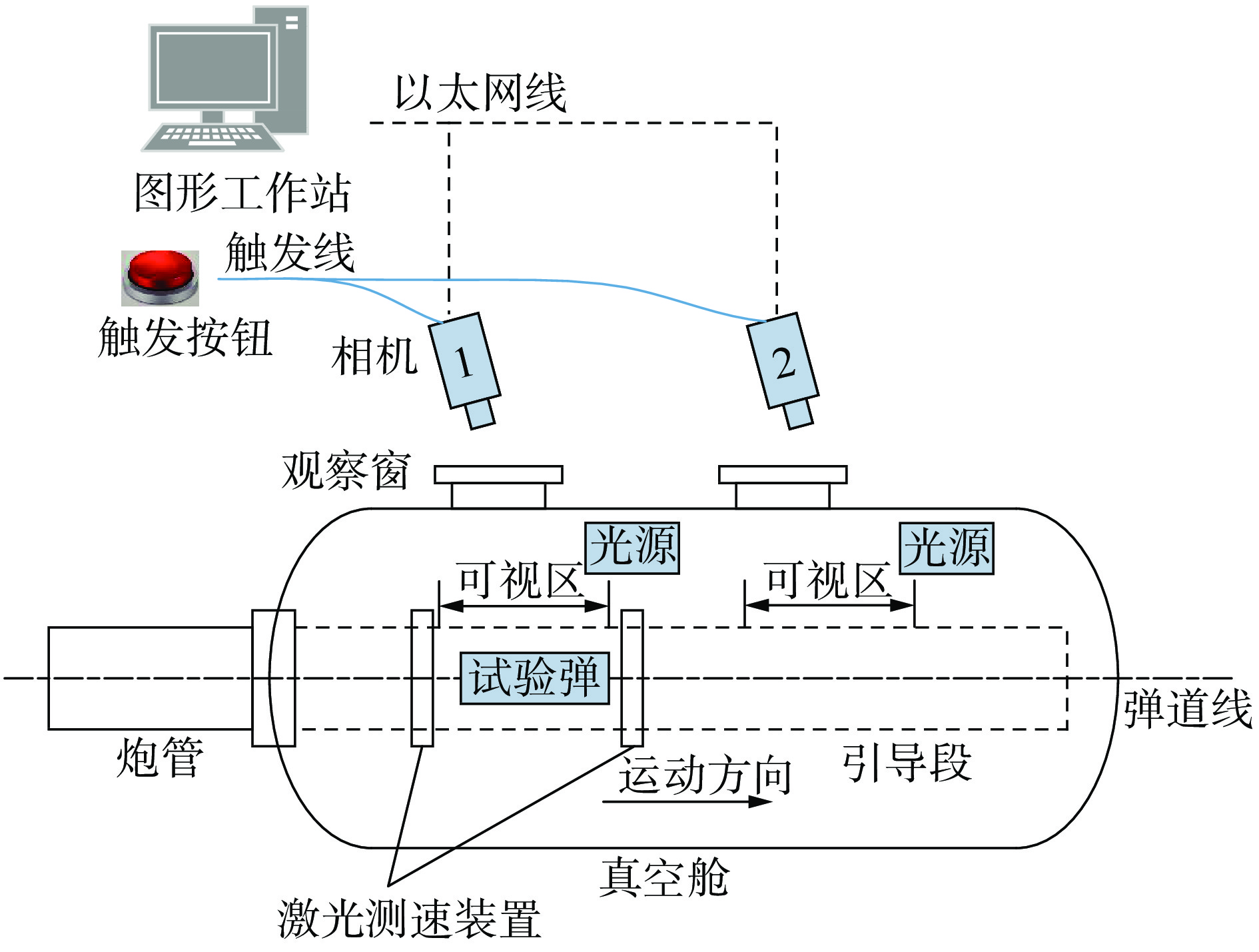
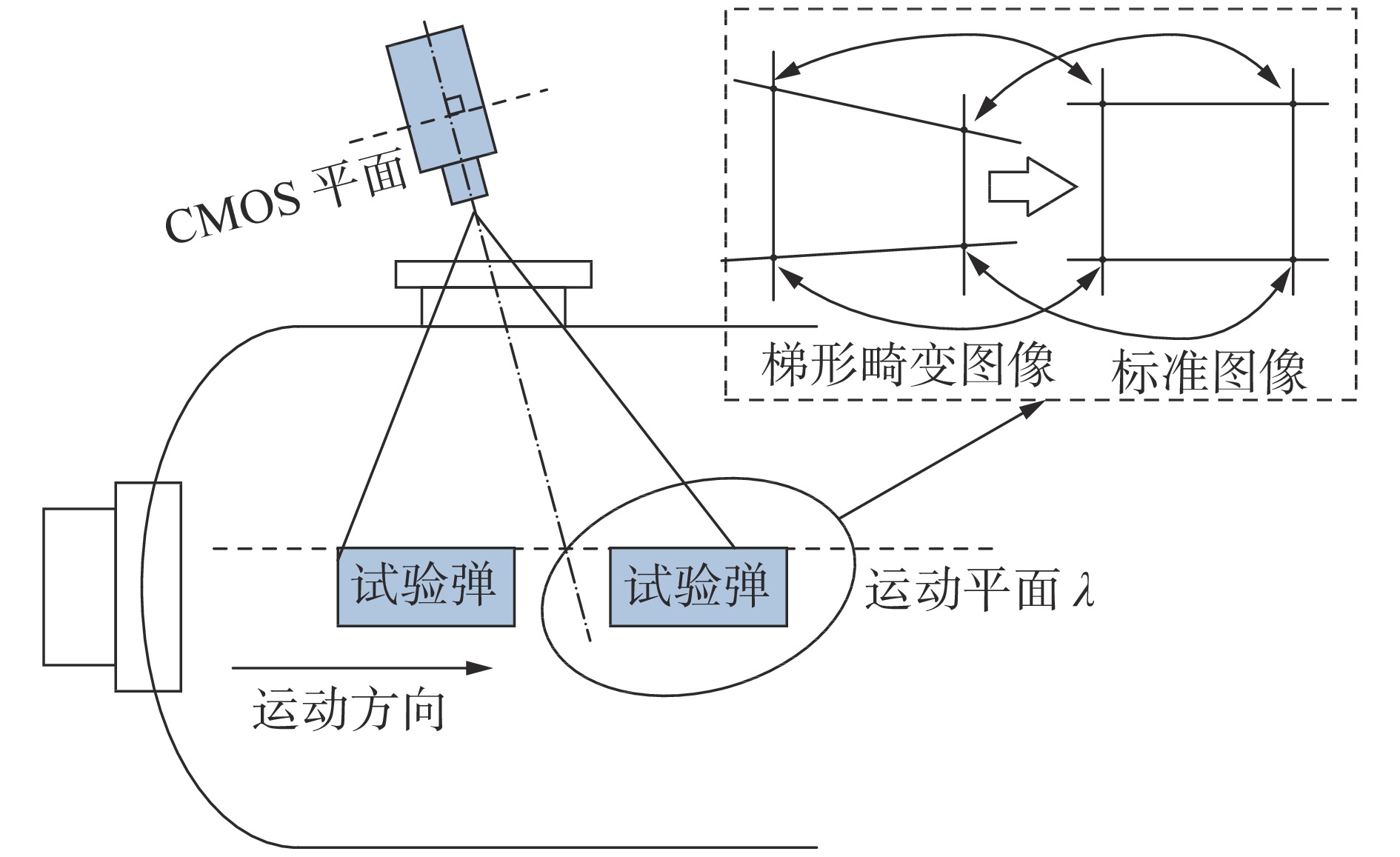
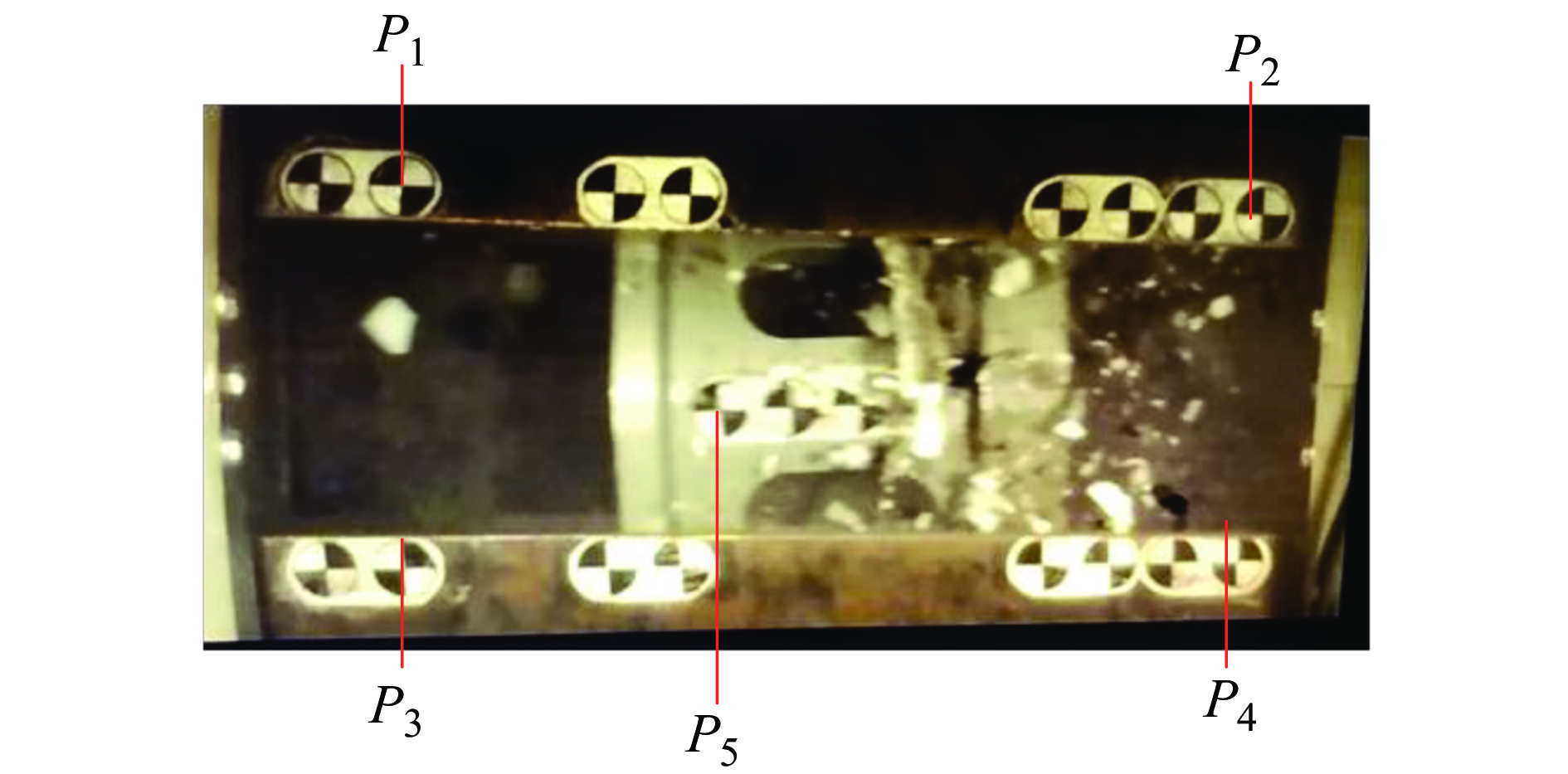
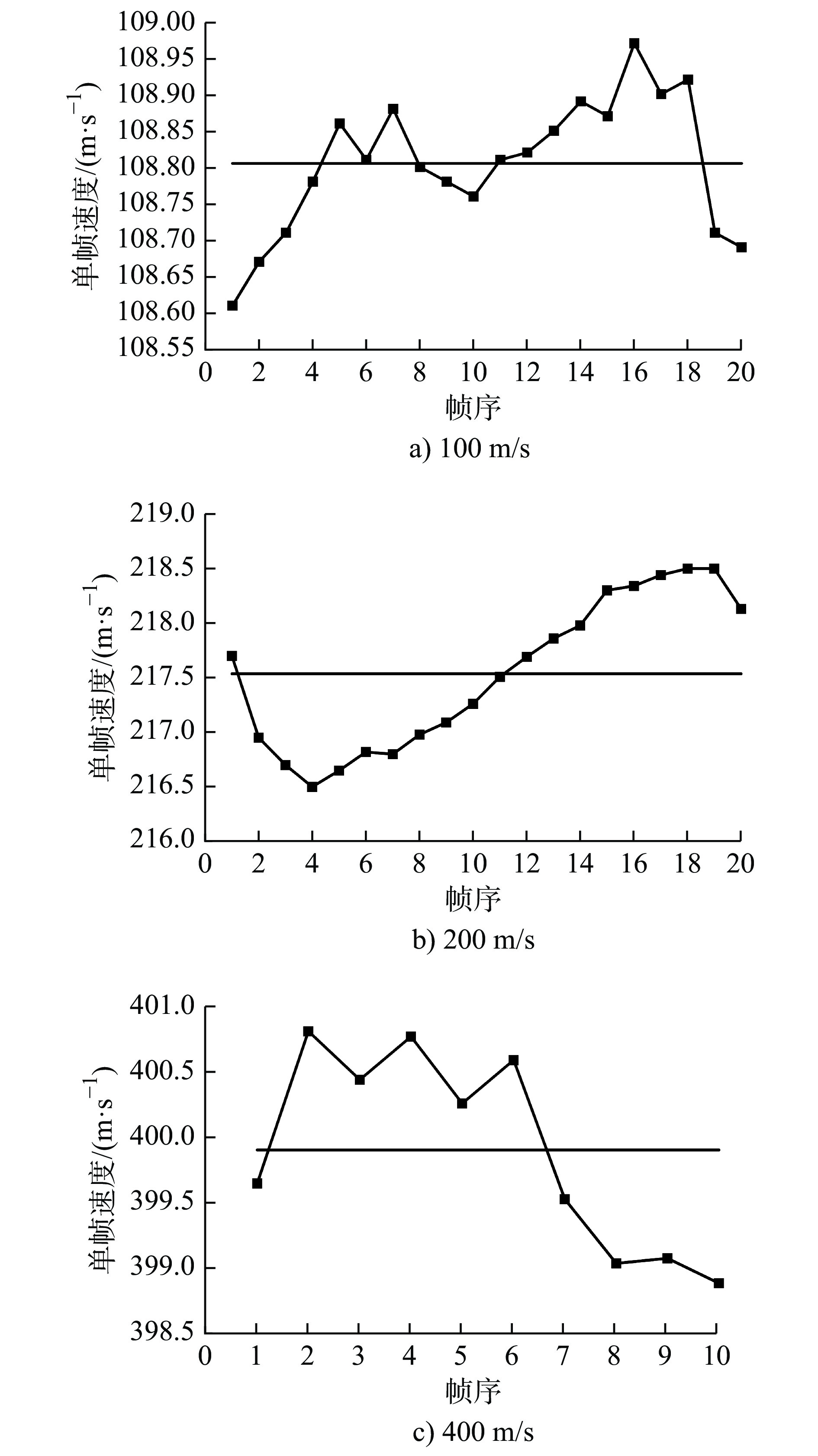
To improve the effectiveness and accuracy for measuring velocity of projectiles in strong impact test, this paper designed a type of high-speed photography velocity measurement scheme to measure the velocity before impacting of the projectile. According to the test conditions, the key equipment is selected and the high-speed photography velocity measurement system is built, the finite impulse response(FIR)filter selected different half lengths is used to calculate the velocity, and the image tilt distortion is solved by "4 Points Mode". The correctional result of the high-speed photography velocity system was compared to traditional laser test result, which proved that the two test results are highly consistent(the relative error is within 0.5%). Finally, the three groups of continuous exit velocities analyzed by the velocity measurement system prove that the strong impact test system has the ability to provide stable velocity.
To improve the effectiveness and accuracy for measuring velocity of projectiles in strong impact test, this paper designed a type of high-speed photography velocity measurement scheme to measure the velocity before impacting of the projectile. According to the test conditions, the key equipment is selected and the high-speed photography velocity measurement system is built, the finite impulse response(FIR)filter selected different half lengths is used to calculate the velocity, and the image tilt distortion is solved by "4 Points Mode". The correctional result of the high-speed photography velocity system was compared to traditional laser test result, which proved that the two test results are highly consistent(the relative error is within 0.5%). Finally, the three groups of continuous exit velocities analyzed by the velocity measurement system prove that the strong impact test system has the ability to provide stable velocity.


2024, 43(5): 911-916.
doi: 10.13433/j.cnki.1003-8728.20220281
Abstract:
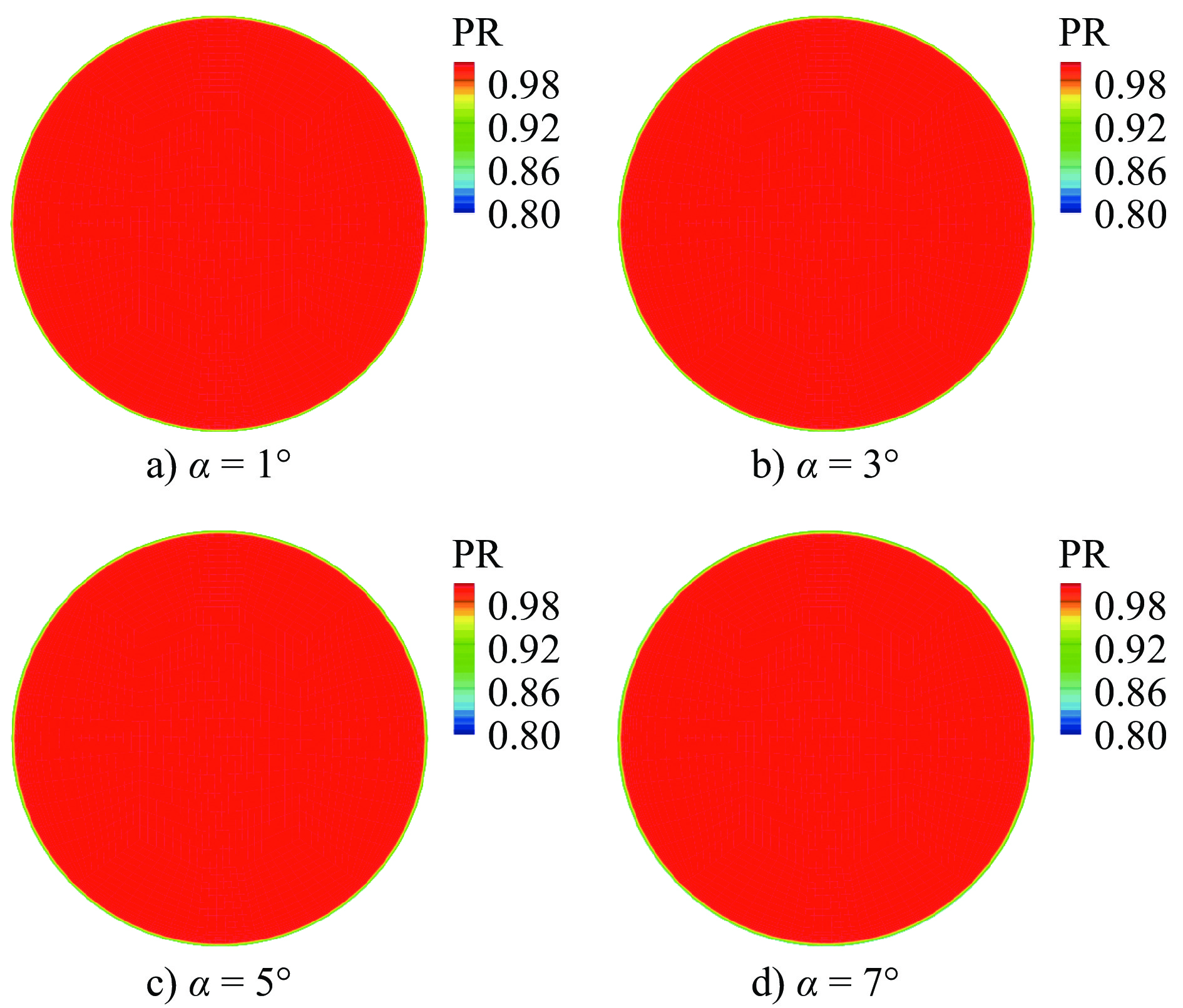
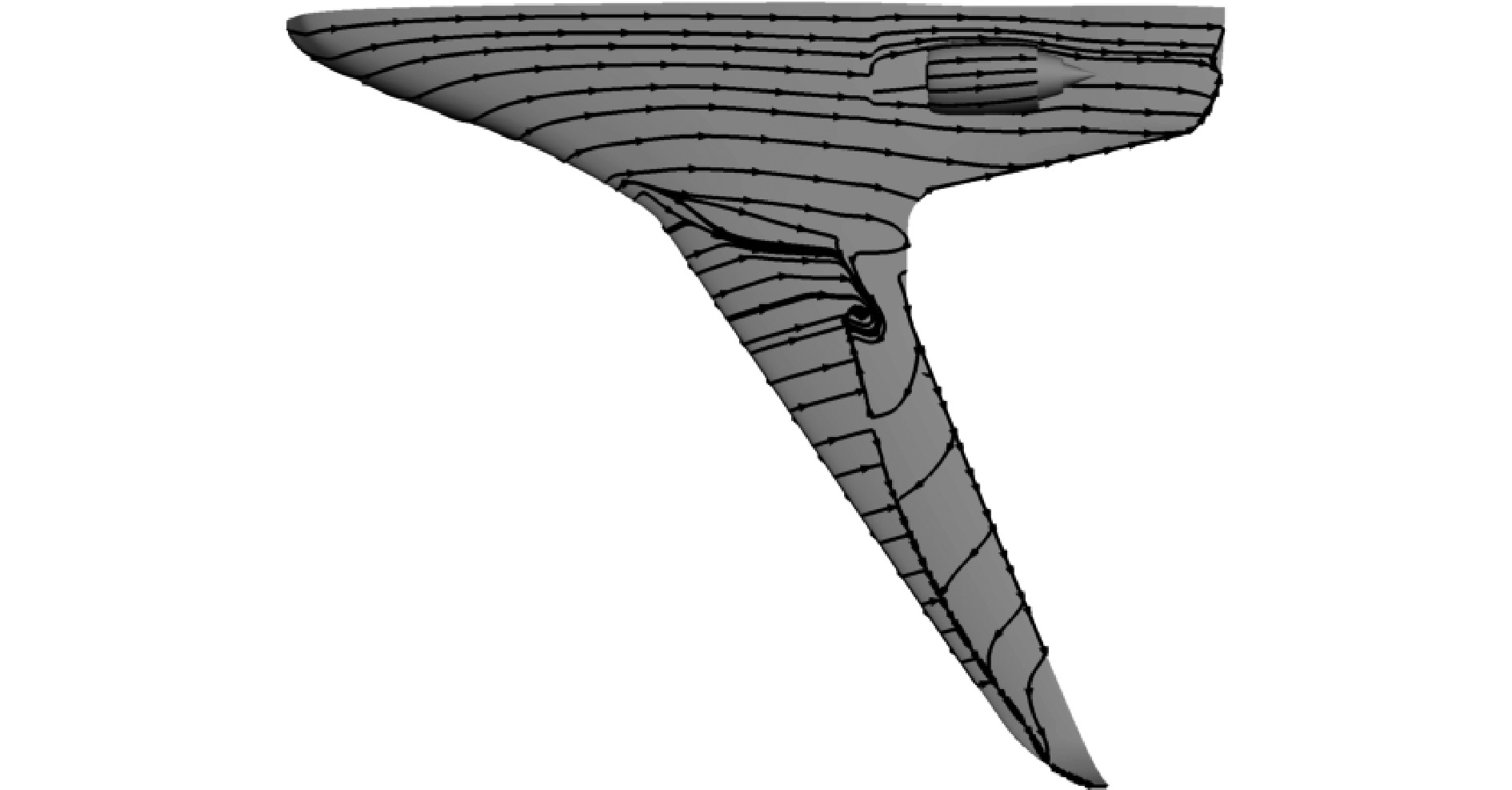
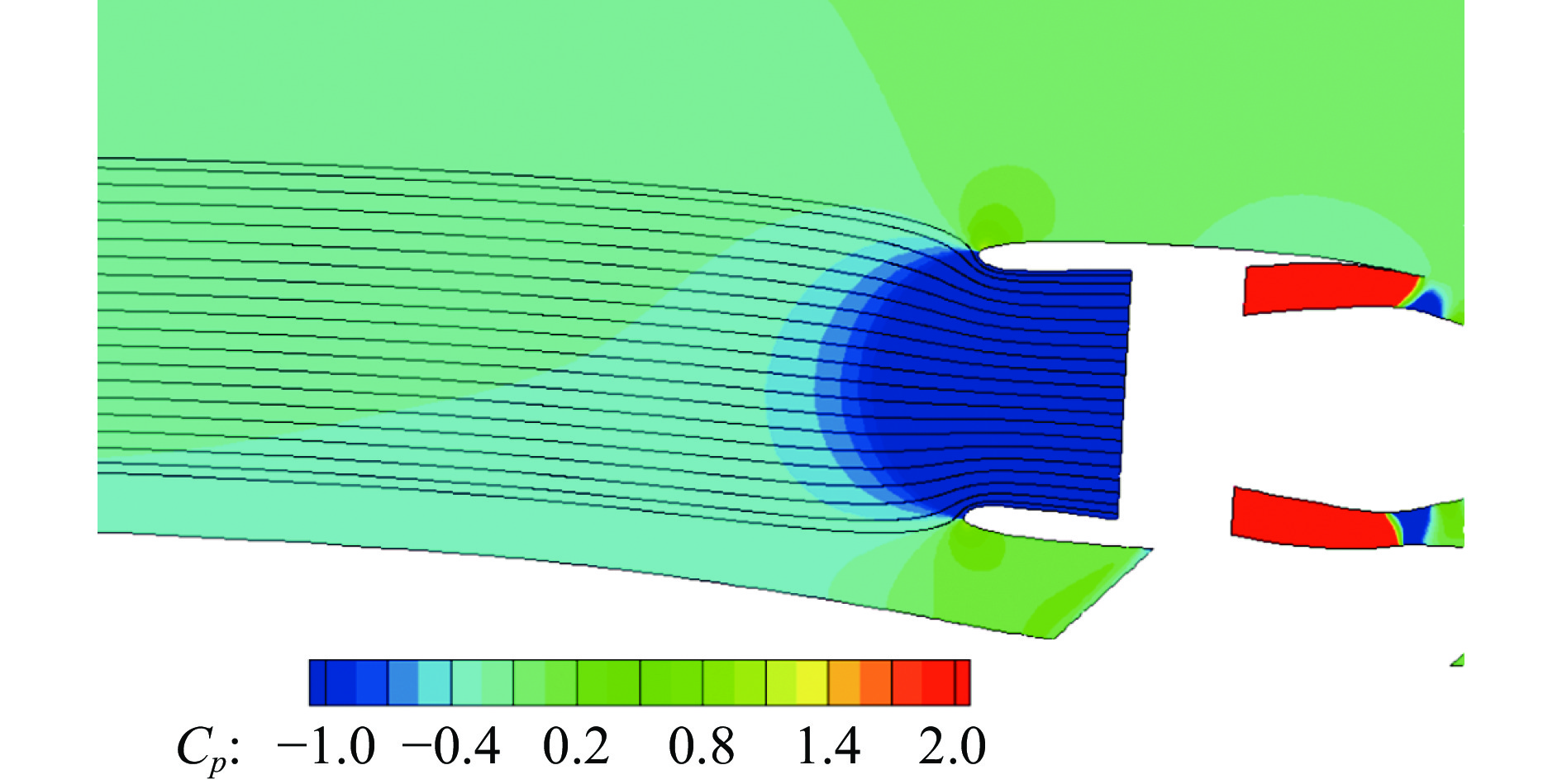
In order to evaluate whether the body has an adverse effect on the engine inflow after the engine is installed, the influence of the BWB300 body on the engine inflow quality at high and low speeds is studied by using the numerical simulation. The results show that at high speed, the influence of the BWB300 body on the engine inlet flow quality is very small, because of the high speed flow at the front of the engine can fully meet the BWB300 intake demand; while at low speed, due to the large engine mass flow inlet demand and the airflow speed is low at the front of engine, if there is flow separation on the surface of the body, the separated flow will be more easy sucked in by the engine, thus reducing its inlet flow quality. Therefore, for the upper mounted engine layout aircraft like BWB300, the engine-airframe integration design should try to avoid the flow separation on its upper surface occurring near the engine location.
In order to evaluate whether the body has an adverse effect on the engine inflow after the engine is installed, the influence of the BWB300 body on the engine inflow quality at high and low speeds is studied by using the numerical simulation. The results show that at high speed, the influence of the BWB300 body on the engine inlet flow quality is very small, because of the high speed flow at the front of the engine can fully meet the BWB300 intake demand; while at low speed, due to the large engine mass flow inlet demand and the airflow speed is low at the front of engine, if there is flow separation on the surface of the body, the separated flow will be more easy sucked in by the engine, thus reducing its inlet flow quality. Therefore, for the upper mounted engine layout aircraft like BWB300, the engine-airframe integration design should try to avoid the flow separation on its upper surface occurring near the engine location.