Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2023 Vol. 42, No. 4
Display Method:
2023, 42(4): 493-503.
doi: 10.13433/j.cnki.1003-8728.20200621
 PDF 1346KB
PDF 1346KB
Abstract:
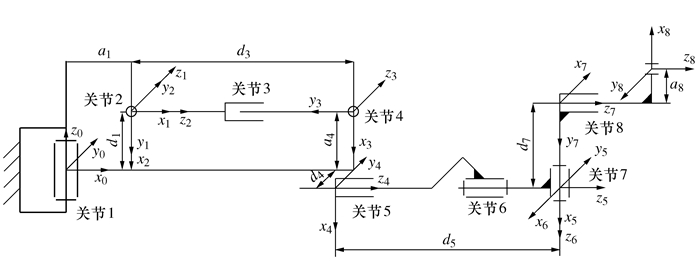
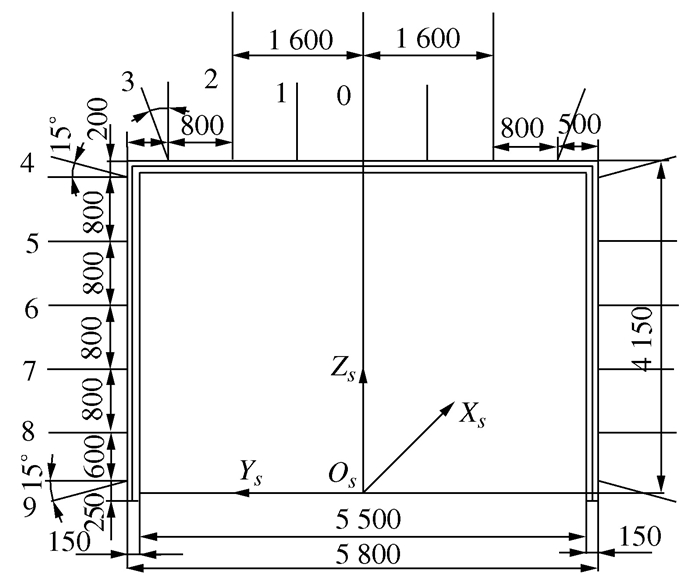
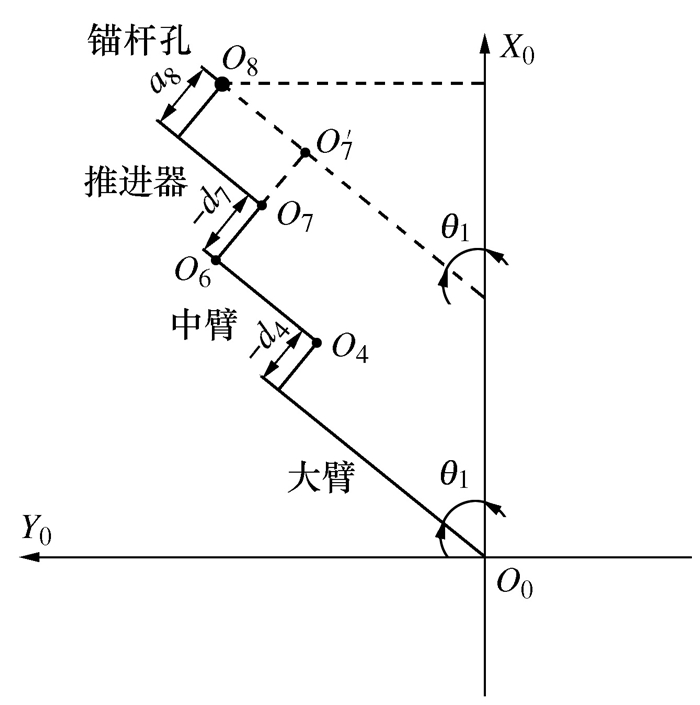
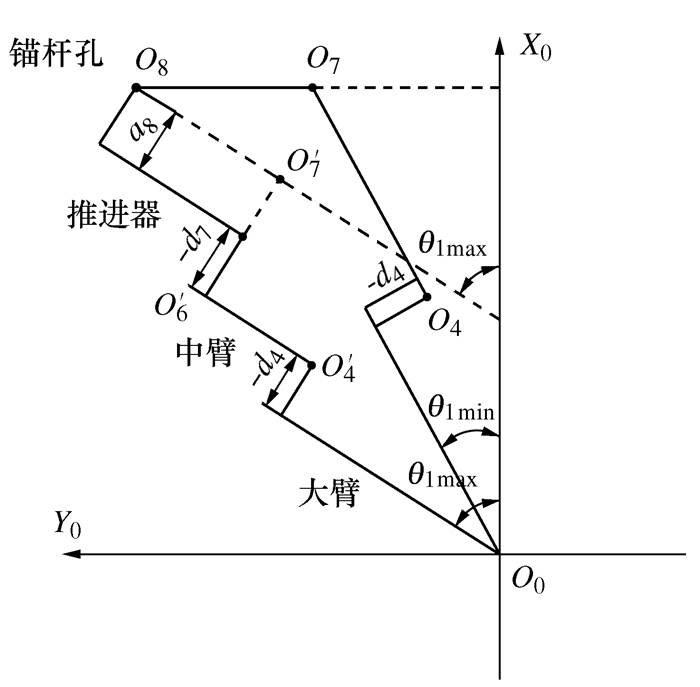
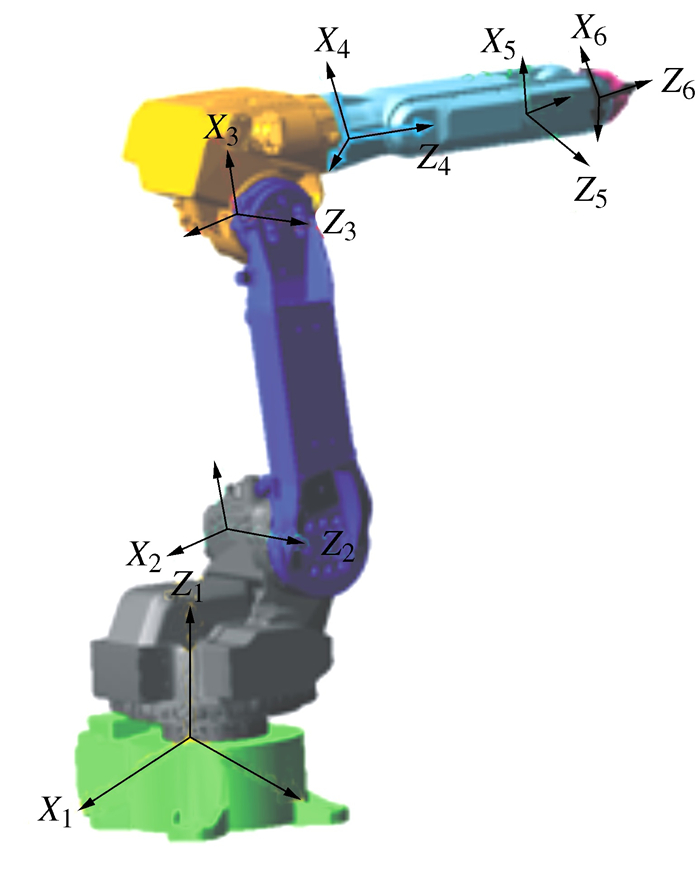
The automatic positioning of the manipulator of the bolt-drilling rig is needed in the further implementing the automatic supporting process in the construction of mine laneway. This focus is to solve the inverse kinematics problem of a redundant manipulator with serial-parallel hybrid mechanism and 8 degree of freedom. The manipulator has two characteristics, one of which is the overall series-open-chain mechanism embedded with a partly-parallel quadrilateral mechanism in its base arm, and another of which is the redundant degrees of freedom which leads to infinite solutions for the inverse kinematics. For the former, in order to establish the kinematics model by using the Denavit-Hartenberg(D-H) method, the motion expression of the parallel structure is deduced, and the equivalent open chain structure is proposed to replace the parallel counterpart. For the latter, the structure of the manipulator and its actual work conditions are analyzed, in which three constraints are concluded for solving the inverse kinematics: 1) the positioning cylinder is set at its maximum elongation in order to ensure the maximum stroke of the propeller in actual drilling; 2) according to the types of bolt holes, the quadrilateral shape of the base arm is conditionally set to realize the proper compensation for orientation; 3) the length of the middle arm for position compensation is chosen in higher priority to keep the demand for the moving of the base arm as rarely as possible. Then an inverse kinematics algorithm based on the position-pose separation is proposed for the manipulator, and the results of the solution takes full advantages of the redundant characteristic of the manipulator and is in favor of the straight forward and convenient operation for human operator. For the validation of the algorithm, an example design of bolt-holes for a rectangular section of mine laneway is used; the simulations on a personal laptop show the satisfactory result of the algorithm in the precision and calculation speed; the algorithm is also deployed on a control Programmable Logic Controller (PLC) of a bolt-drilling rig, and the drilling test in a simulated mine laneway shows that the algorithm meets the needs of the practical application.
The automatic positioning of the manipulator of the bolt-drilling rig is needed in the further implementing the automatic supporting process in the construction of mine laneway. This focus is to solve the inverse kinematics problem of a redundant manipulator with serial-parallel hybrid mechanism and 8 degree of freedom. The manipulator has two characteristics, one of which is the overall series-open-chain mechanism embedded with a partly-parallel quadrilateral mechanism in its base arm, and another of which is the redundant degrees of freedom which leads to infinite solutions for the inverse kinematics. For the former, in order to establish the kinematics model by using the Denavit-Hartenberg(D-H) method, the motion expression of the parallel structure is deduced, and the equivalent open chain structure is proposed to replace the parallel counterpart. For the latter, the structure of the manipulator and its actual work conditions are analyzed, in which three constraints are concluded for solving the inverse kinematics: 1) the positioning cylinder is set at its maximum elongation in order to ensure the maximum stroke of the propeller in actual drilling; 2) according to the types of bolt holes, the quadrilateral shape of the base arm is conditionally set to realize the proper compensation for orientation; 3) the length of the middle arm for position compensation is chosen in higher priority to keep the demand for the moving of the base arm as rarely as possible. Then an inverse kinematics algorithm based on the position-pose separation is proposed for the manipulator, and the results of the solution takes full advantages of the redundant characteristic of the manipulator and is in favor of the straight forward and convenient operation for human operator. For the validation of the algorithm, an example design of bolt-holes for a rectangular section of mine laneway is used; the simulations on a personal laptop show the satisfactory result of the algorithm in the precision and calculation speed; the algorithm is also deployed on a control Programmable Logic Controller (PLC) of a bolt-drilling rig, and the drilling test in a simulated mine laneway shows that the algorithm meets the needs of the practical application.


2023, 42(4): 504-511.
doi: 10.13433/j.cnki.1003-8728.20200633
Abstract:
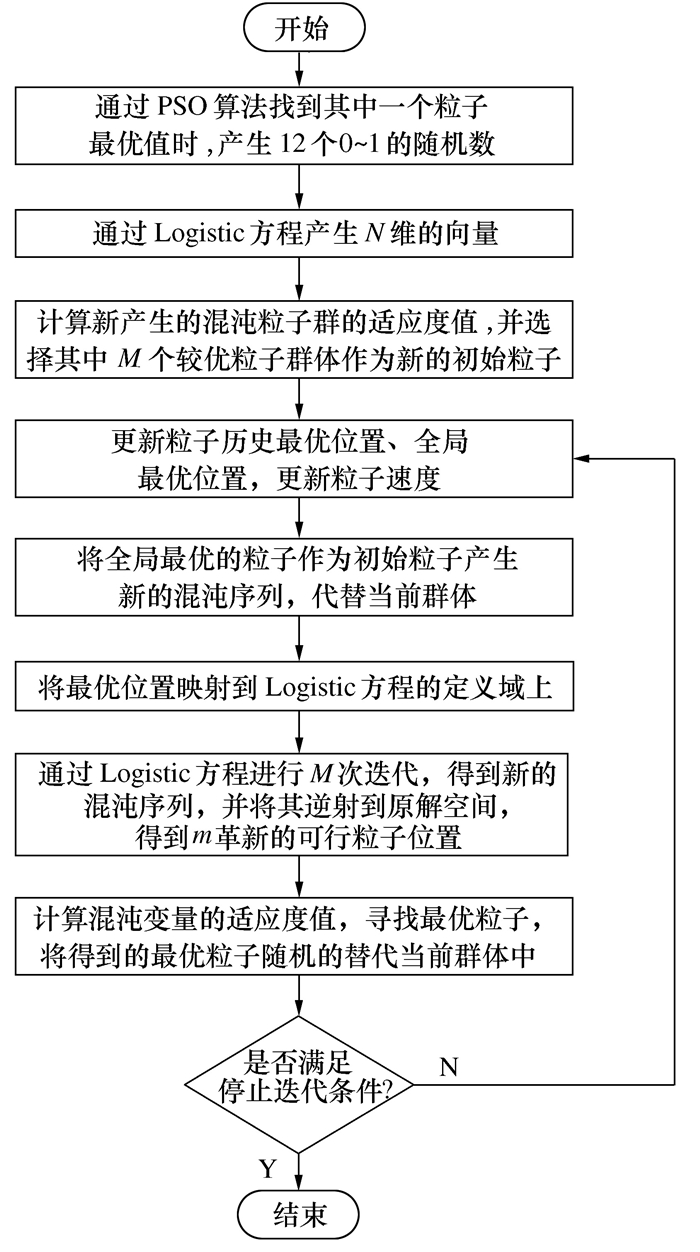
Aiming at the complex multi-freedom manipulator system of industrial robot, the multi-rigid body kinematics model was established to verify the authenticity of the end motion trajectory. On this basis, the end joints of the manipulator system were flexibly processed and random flexible perturbations were added to obtain the real end trajectory curve of the rigid-flexible coupling manipulator. The vibration suppression scheme based on chaotic particle swarm optimization (CPSO) was proposed. The interpolation parameters of the end trajectory of the manipulator were optimized by CPSO algorithm. The objective function of the flexible end was defined to minimize the vibration deformation, and the specific solving steps were given. Numerical simulation results show that under the condition of satisfying the constraints of the system, the manipulator runs smoothly without angular velocity mutation. Compared with the fundamental particle swarm optimization algorithm, the CPSO algorithm ensures the randomness of the particle population, improves the diversity of the population, and has a faster convergence speed without falling into local optimum. Under CPSO optimization, the trajectory vibration of the flexible end of the manipulator is significantly reduced, which indicates that the CPSO algorithm can effectively optimize the trajectory planning parameters and reduce the vibration deformation of the flexible end of the manipulator.
Aiming at the complex multi-freedom manipulator system of industrial robot, the multi-rigid body kinematics model was established to verify the authenticity of the end motion trajectory. On this basis, the end joints of the manipulator system were flexibly processed and random flexible perturbations were added to obtain the real end trajectory curve of the rigid-flexible coupling manipulator. The vibration suppression scheme based on chaotic particle swarm optimization (CPSO) was proposed. The interpolation parameters of the end trajectory of the manipulator were optimized by CPSO algorithm. The objective function of the flexible end was defined to minimize the vibration deformation, and the specific solving steps were given. Numerical simulation results show that under the condition of satisfying the constraints of the system, the manipulator runs smoothly without angular velocity mutation. Compared with the fundamental particle swarm optimization algorithm, the CPSO algorithm ensures the randomness of the particle population, improves the diversity of the population, and has a faster convergence speed without falling into local optimum. Under CPSO optimization, the trajectory vibration of the flexible end of the manipulator is significantly reduced, which indicates that the CPSO algorithm can effectively optimize the trajectory planning parameters and reduce the vibration deformation of the flexible end of the manipulator.







2023, 42(4): 512-520.
doi: 10.13433/j.cnki.1003-8728.20200647
Abstract:
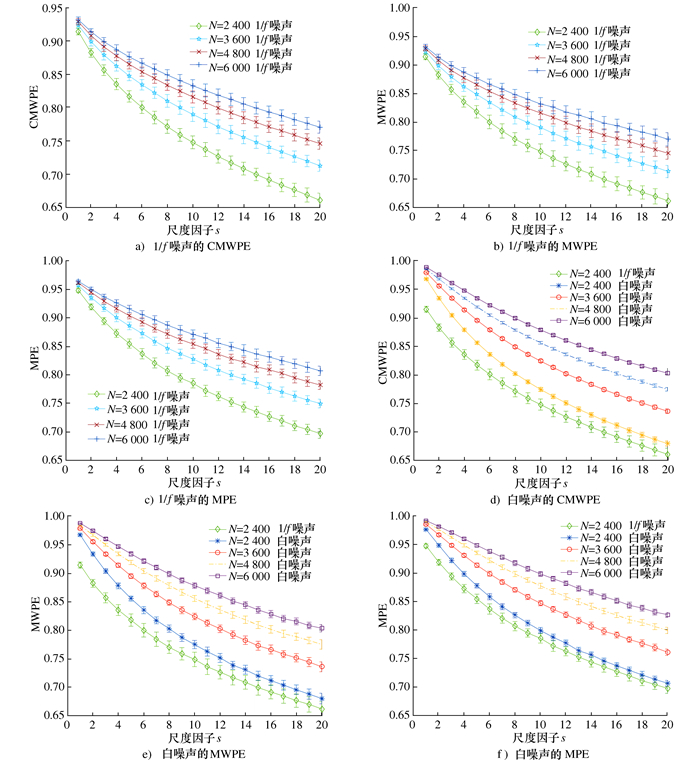
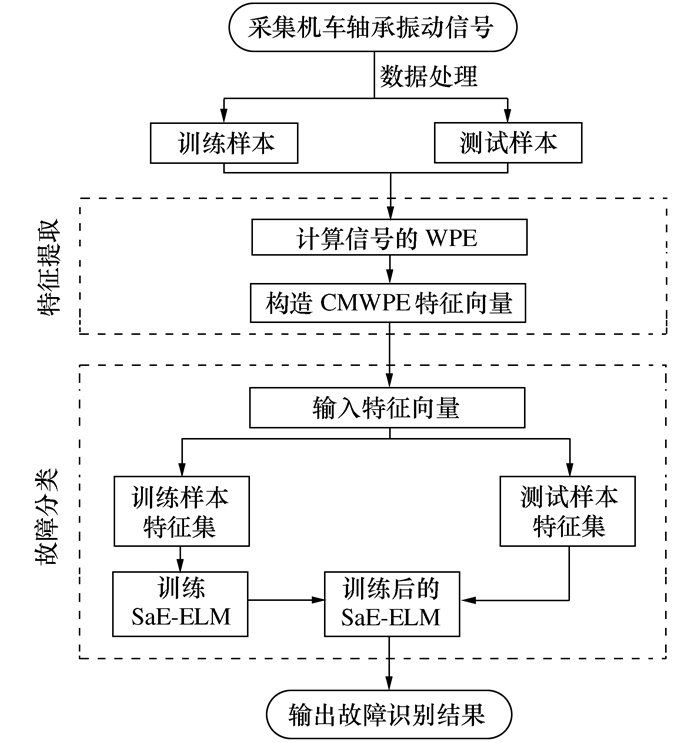
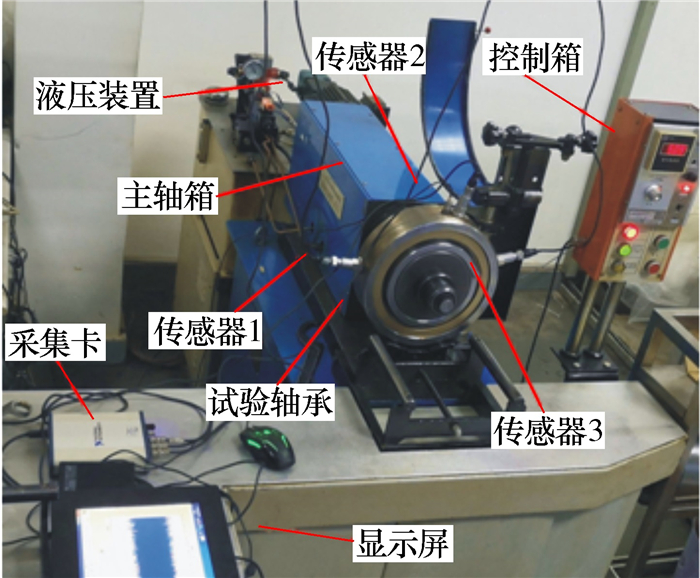
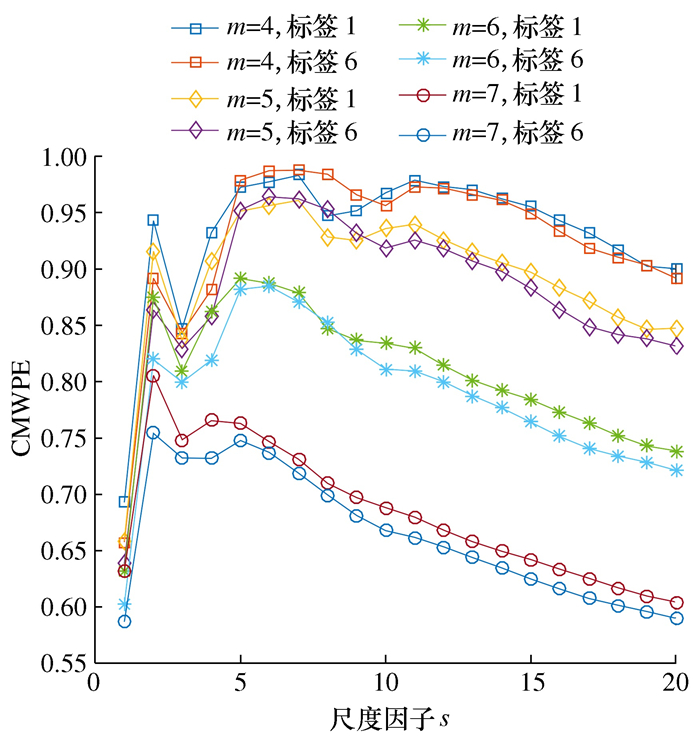
Aiming at the identification of different fault states of DF4 typed diesel locomotives, a fault diagnosis method is proposed by the combination of Composite Multiscale Weighted Permutation Entropy (CMWPE) and Self-Adaptive Evolutionary Extreme Learning Machine (SaE-ELM). CMWPE is based on the idea of composite coarsening and weighted permutation entropy, which can distinguish the different modes of signals very well. SaE-ELM optimizes the input weight, hidden layer parameter and output weight of the extreme learning machine by adaptive evolutionary algorithm, which solves the limitation of ELM random selection of network parameters and improves the generalization performance of the network. The CMWPE of vibration signals of wheelset bearings in different health states is used to identify the type and degree of fault of bearings by SaE-ELM. The vibration signal data of seven wheelset bearing specimens in different health conditions were collected on the JL-501 bearing test bench of the locomotive Depot. The results show that CMWPE feature extraction is better than MPE and MWPE, and SaE-ELM pattern recognition is better than ELM without optimized parameters. The proposed method can effectively diagnose different faults of locomotive wheelset bearings, and the fault recognition rate reaches 100%.
Aiming at the identification of different fault states of DF4 typed diesel locomotives, a fault diagnosis method is proposed by the combination of Composite Multiscale Weighted Permutation Entropy (CMWPE) and Self-Adaptive Evolutionary Extreme Learning Machine (SaE-ELM). CMWPE is based on the idea of composite coarsening and weighted permutation entropy, which can distinguish the different modes of signals very well. SaE-ELM optimizes the input weight, hidden layer parameter and output weight of the extreme learning machine by adaptive evolutionary algorithm, which solves the limitation of ELM random selection of network parameters and improves the generalization performance of the network. The CMWPE of vibration signals of wheelset bearings in different health states is used to identify the type and degree of fault of bearings by SaE-ELM. The vibration signal data of seven wheelset bearing specimens in different health conditions were collected on the JL-501 bearing test bench of the locomotive Depot. The results show that CMWPE feature extraction is better than MPE and MWPE, and SaE-ELM pattern recognition is better than ELM without optimized parameters. The proposed method can effectively diagnose different faults of locomotive wheelset bearings, and the fault recognition rate reaches 100%.






2023, 42(4): 521-529.
doi: 10.13433/j.cnki.1003-8728.20200642
Abstract:
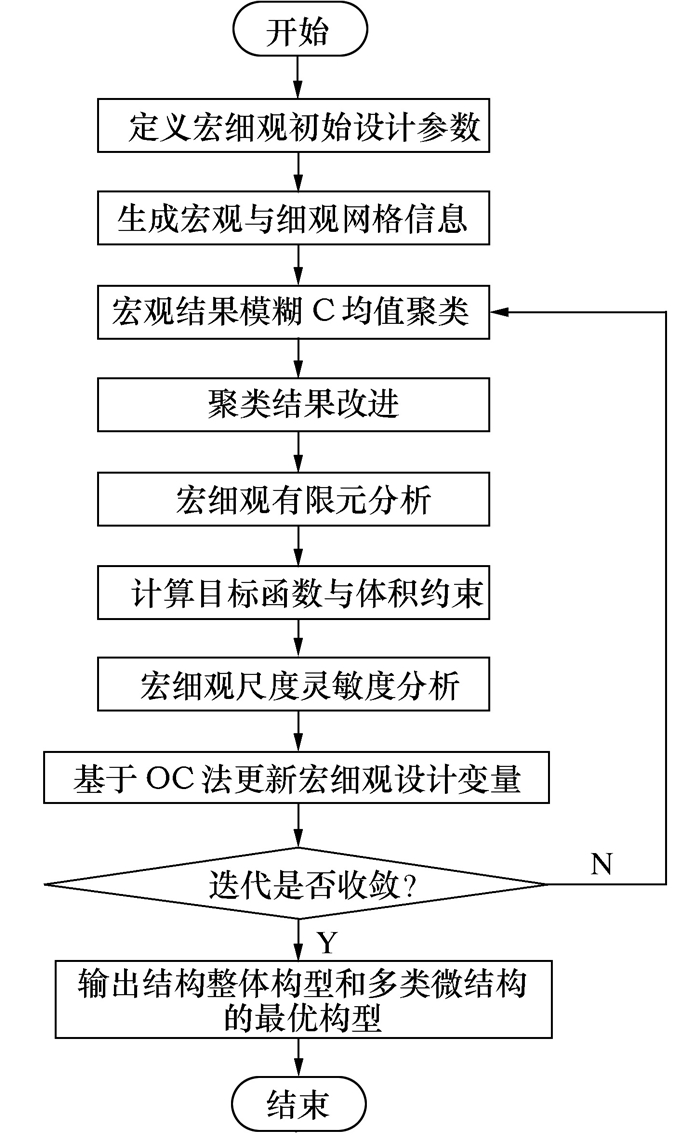
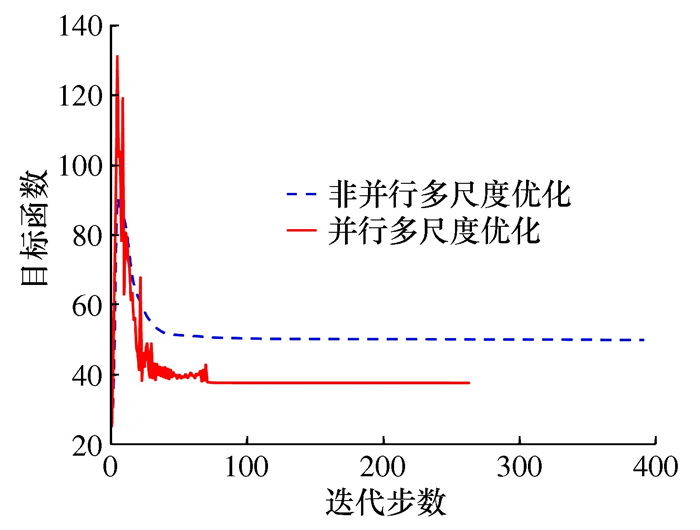
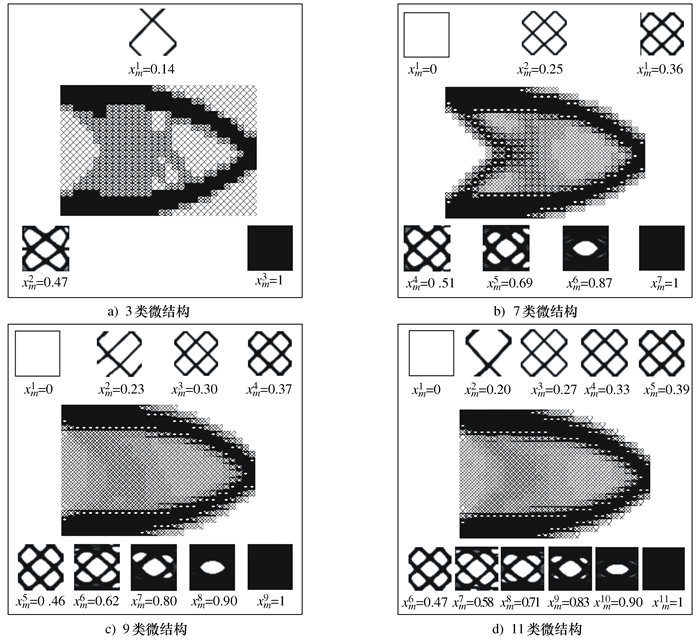
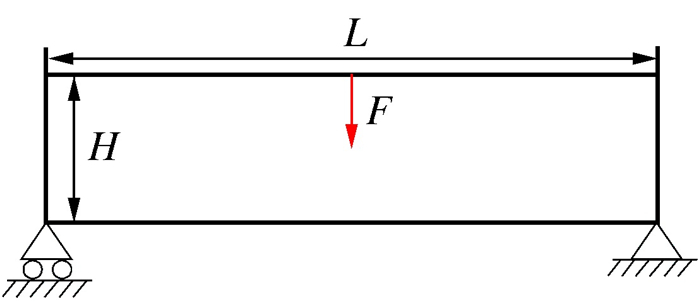
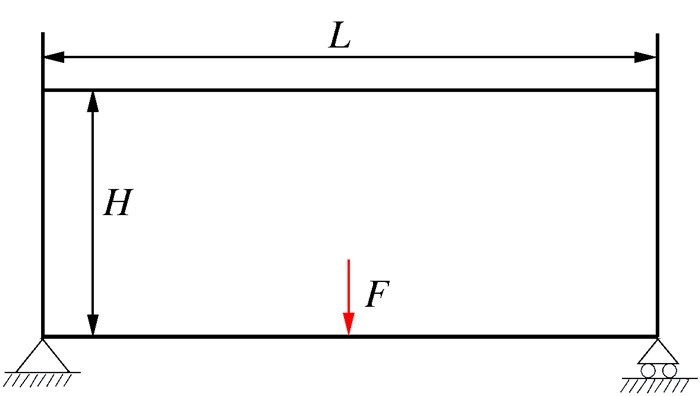
Porous structure is widely used in aerospace and manufacturing equipment field because porous structure usually has light weight, high specific stiffness and strength as well as excellent vibration isolation and thermal insulation performance. In order to get an excellent performance of porous materials, this paper proposes a multi-scale parallel topology optimization design method which considers simultaneously both the macroscopic and microstructure properties of the structure to obtain a porous structure with excellent performance. The clustering method is performed in this paper to effectively reduce the computational cost, and an improved model is proposed to solve the problem that is difficult to converge in parallel optimization, so that the iteration is smoothly closed. Finally, the classic cantilever beam, MBB beam and Michell structure are used as examples to assess the proposed method. The effectiveness and correctness of the proposed method are verified via comparing the optimization results.
Porous structure is widely used in aerospace and manufacturing equipment field because porous structure usually has light weight, high specific stiffness and strength as well as excellent vibration isolation and thermal insulation performance. In order to get an excellent performance of porous materials, this paper proposes a multi-scale parallel topology optimization design method which considers simultaneously both the macroscopic and microstructure properties of the structure to obtain a porous structure with excellent performance. The clustering method is performed in this paper to effectively reduce the computational cost, and an improved model is proposed to solve the problem that is difficult to converge in parallel optimization, so that the iteration is smoothly closed. Finally, the classic cantilever beam, MBB beam and Michell structure are used as examples to assess the proposed method. The effectiveness and correctness of the proposed method are verified via comparing the optimization results.












2023, 42(4): 530-537.
doi: 10.13433/j.cnki.1003-8728.20200639
Abstract:
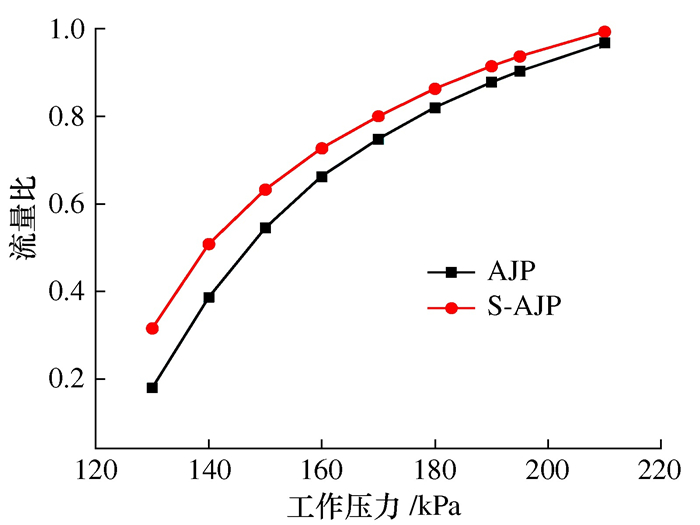
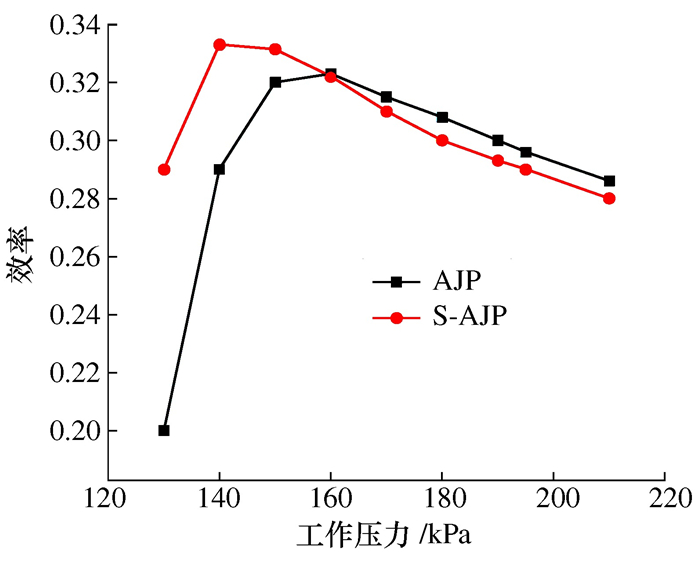
To improve the transport efficiency of the annular jet pump (AJP), a spiral flow annular jet pump (S-AJP) with guide vane structure to form a spiral flow was proposed in this paper. The numerical simulation was conducted to study the velocity, pressure and turbulent kinetic energy distribution of the S-AJP and the AJP under different working pressures, and the influence of spiral flow on the performance of the S-AJP is analyzed. The simulation results show that when the working pressure is 130 kPa, the spiral flow increases the flow ratio of the AJP by 43.1% and the pressure ratio decreases by 22.8%. The spiral flow reduces the static pressure in the throat of the S-AJP and causes cavitation more easily. The spiral flow makes the efficiency of the S-AJP higher than the AJP when the working pressure is lower than 160 kPa. Compared with the AJP, the S-AJP has a larger turbulent kinetic energy distribution area. As the working pressure increases, the difference of the turbulent kinetic energy distribution between the two structures of the AJP decreases. The resistance of guide vane has an important effect on the efficiency of the S-AJP.
To improve the transport efficiency of the annular jet pump (AJP), a spiral flow annular jet pump (S-AJP) with guide vane structure to form a spiral flow was proposed in this paper. The numerical simulation was conducted to study the velocity, pressure and turbulent kinetic energy distribution of the S-AJP and the AJP under different working pressures, and the influence of spiral flow on the performance of the S-AJP is analyzed. The simulation results show that when the working pressure is 130 kPa, the spiral flow increases the flow ratio of the AJP by 43.1% and the pressure ratio decreases by 22.8%. The spiral flow reduces the static pressure in the throat of the S-AJP and causes cavitation more easily. The spiral flow makes the efficiency of the S-AJP higher than the AJP when the working pressure is lower than 160 kPa. Compared with the AJP, the S-AJP has a larger turbulent kinetic energy distribution area. As the working pressure increases, the difference of the turbulent kinetic energy distribution between the two structures of the AJP decreases. The resistance of guide vane has an important effect on the efficiency of the S-AJP.













2023, 42(4): 538-545.
doi: 10.13433/j.cnki.1003-8728.20200638
Abstract:
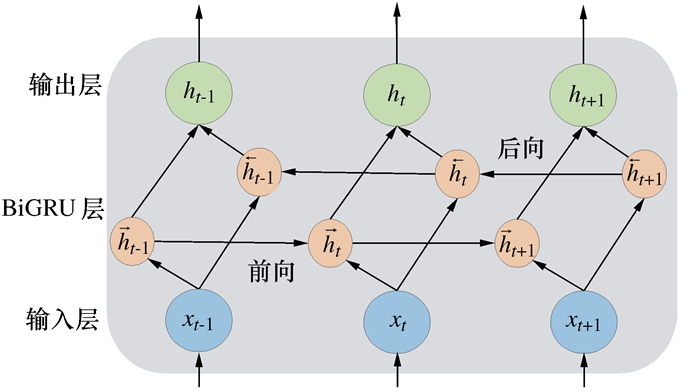
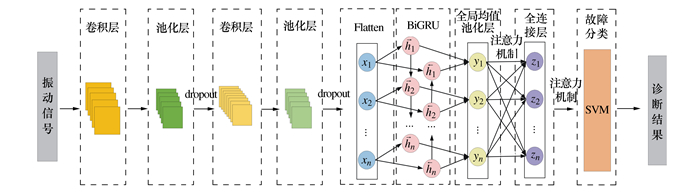
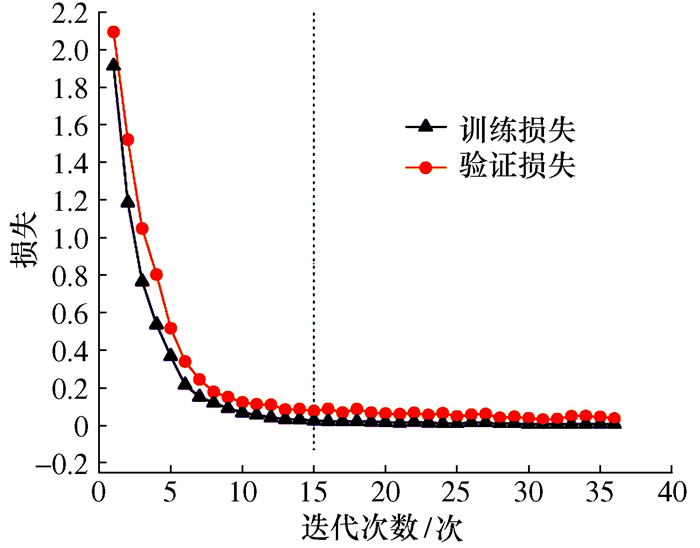
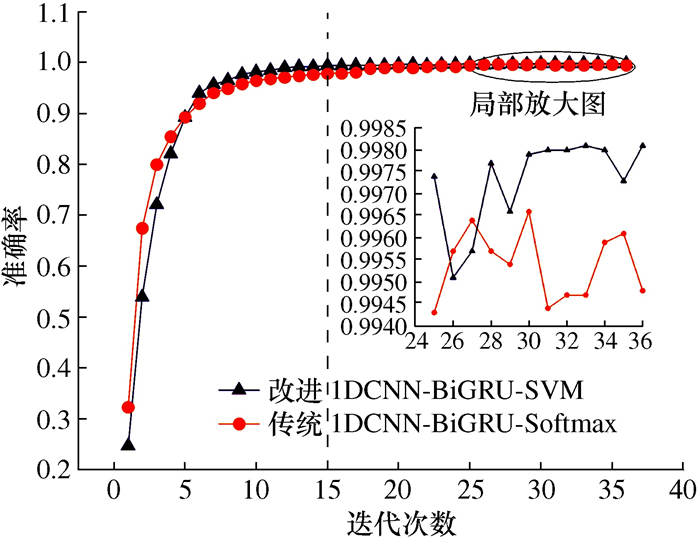
Aiming at the shortcomings of traditional intelligent fault diagnosis method that relies on manual experience for feature extraction and traditional convolutional neural networks (Convolutional neural networks, CNN) with too many parameters, too much training, and inability to make full use of time series information, a new deep learning algorithm based on an improved one-dimensional convolutional neural network and two-way gated loop unit is proposed. Firstly, the method uses the self-extraction ability of one-dimensional convolutional neural networks for feature extraction, and at the same time, a global mean pooling layer is designed to replace the fully connected layer of traditional convolutional neural networks to reduce the number of parameters. Secondly, the two-way gated loop unit is introduced to learn the time series relationship in the characteristic signal. Finally, the support vector machine is used to replace the traditional Softmax layer in CNN for fault classification, which further improves the accuracy of diagnosis. Experiments show that this method improves the accuracy of diagnosis to 99.8% and speeds up the diagnosis. Through comparison with other methods, it is proved that this method has higher accuracy, faster diagnosis speed and better robustness.
Aiming at the shortcomings of traditional intelligent fault diagnosis method that relies on manual experience for feature extraction and traditional convolutional neural networks (Convolutional neural networks, CNN) with too many parameters, too much training, and inability to make full use of time series information, a new deep learning algorithm based on an improved one-dimensional convolutional neural network and two-way gated loop unit is proposed. Firstly, the method uses the self-extraction ability of one-dimensional convolutional neural networks for feature extraction, and at the same time, a global mean pooling layer is designed to replace the fully connected layer of traditional convolutional neural networks to reduce the number of parameters. Secondly, the two-way gated loop unit is introduced to learn the time series relationship in the characteristic signal. Finally, the support vector machine is used to replace the traditional Softmax layer in CNN for fault classification, which further improves the accuracy of diagnosis. Experiments show that this method improves the accuracy of diagnosis to 99.8% and speeds up the diagnosis. Through comparison with other methods, it is proved that this method has higher accuracy, faster diagnosis speed and better robustness.









2023, 42(4): 546-552.
doi: 10.13433/j.cnki.1003-8728.20220006
Abstract:
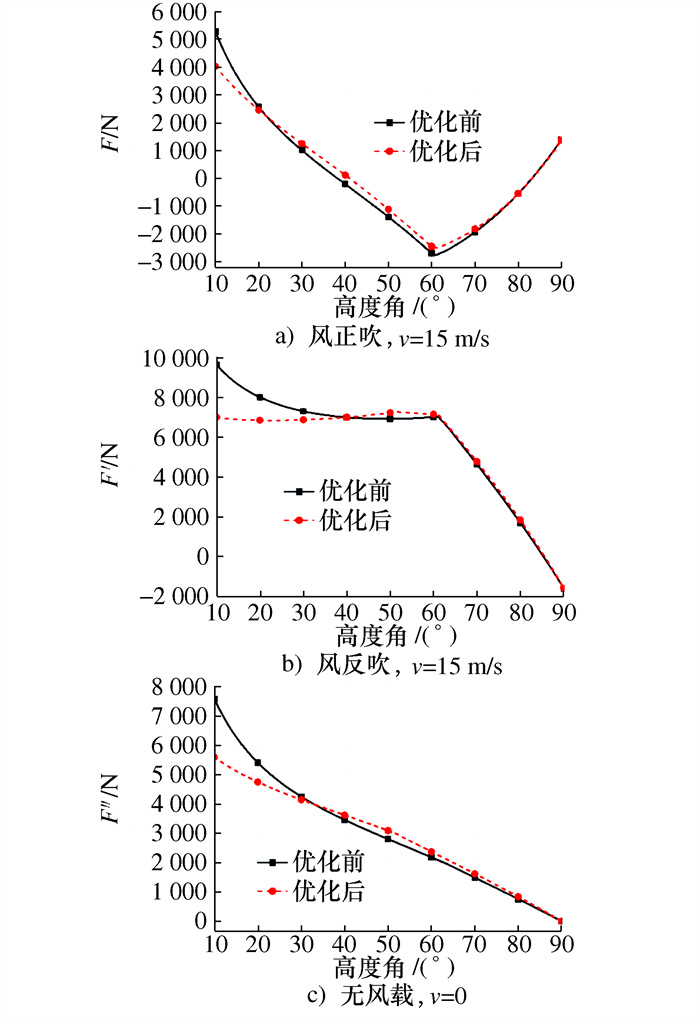
Compared with a stationary solar panel, a solar tracking system can increase the power generation by 25%~40%. Based on the geometric relationship of pitching mechanisms of a solar tracker, the paper establishes the optimal model of minimum load on an electric linear actuator during its complete solar tracking process. The MATLAB program is used to optimize the process parameters and sizes of the pitching mechanism. The results on numerical examples show that the optimized pitching mechanism increases its minimum transmission angle, improves its transmission performance, reduces the load of the electric pusher and ensures its performance and safety.
Compared with a stationary solar panel, a solar tracking system can increase the power generation by 25%~40%. Based on the geometric relationship of pitching mechanisms of a solar tracker, the paper establishes the optimal model of minimum load on an electric linear actuator during its complete solar tracking process. The MATLAB program is used to optimize the process parameters and sizes of the pitching mechanism. The results on numerical examples show that the optimized pitching mechanism increases its minimum transmission angle, improves its transmission performance, reduces the load of the electric pusher and ensures its performance and safety.








2023, 42(4): 553-558.
doi: 10.13433/j.cnki.1003-8728.20220007
Abstract:
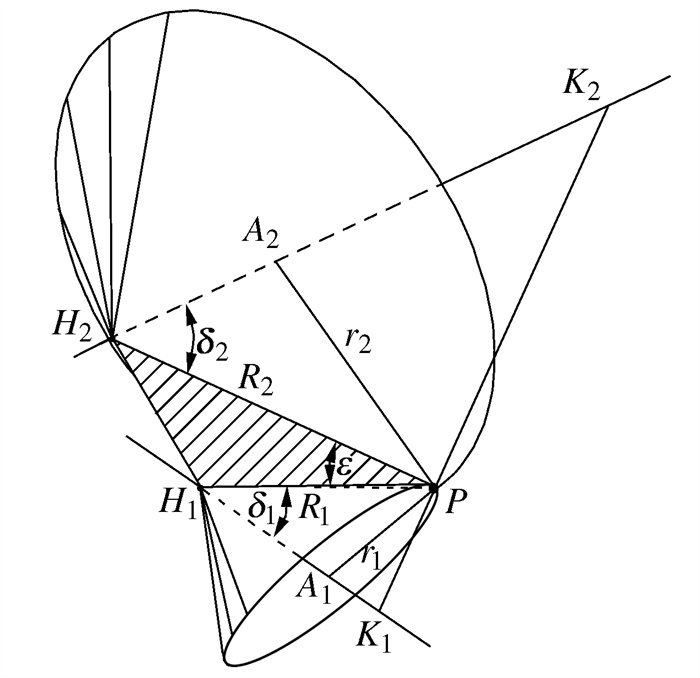
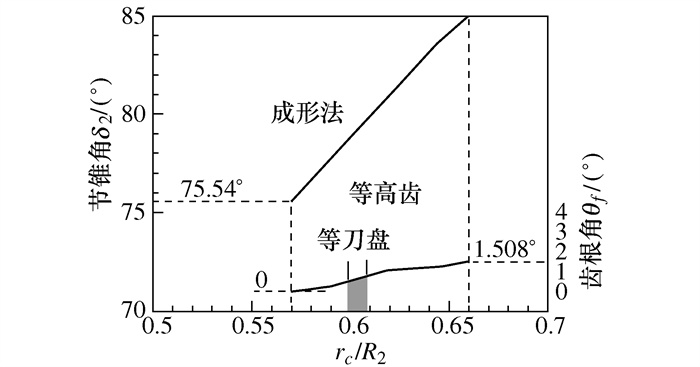
The formation and evolution of the pitch cone and tooth shrinkage of hypoid gear are studied. The coupling relationship among the parameters such as cutter radius, root angle and pitch cone is analyzed. According to the longitudinal displacement principle of the joint, a design method of high reduction hypoid(HRH) gear with high reduction hypoid gear is proposed. By matching the longitudinal displacement coefficient and the radius of the cutter disc, the geometric feasible region of pitch angle and root angle suitable for the HRH gear with equal height forming method is determined, among them the design of equal diameter cutter head provides the convenience for engineering application. The geometric design examples of three kinds of HRH gear equal high forming method are presented. The machining, rolling inspection and dynamic performance tests of three HRH gears are completed. The gear shape and meshing relationship of HRH gear are correct and the contact performance is good. The feasibility of the design method of the high forming method of the longitudinal variable position HRH gear is proved.
The formation and evolution of the pitch cone and tooth shrinkage of hypoid gear are studied. The coupling relationship among the parameters such as cutter radius, root angle and pitch cone is analyzed. According to the longitudinal displacement principle of the joint, a design method of high reduction hypoid(HRH) gear with high reduction hypoid gear is proposed. By matching the longitudinal displacement coefficient and the radius of the cutter disc, the geometric feasible region of pitch angle and root angle suitable for the HRH gear with equal height forming method is determined, among them the design of equal diameter cutter head provides the convenience for engineering application. The geometric design examples of three kinds of HRH gear equal high forming method are presented. The machining, rolling inspection and dynamic performance tests of three HRH gears are completed. The gear shape and meshing relationship of HRH gear are correct and the contact performance is good. The feasibility of the design method of the high forming method of the longitudinal variable position HRH gear is proved.










2023, 42(4): 559-565.
doi: 10.13433/j.cnki.1003-8728.20230089
Abstract:
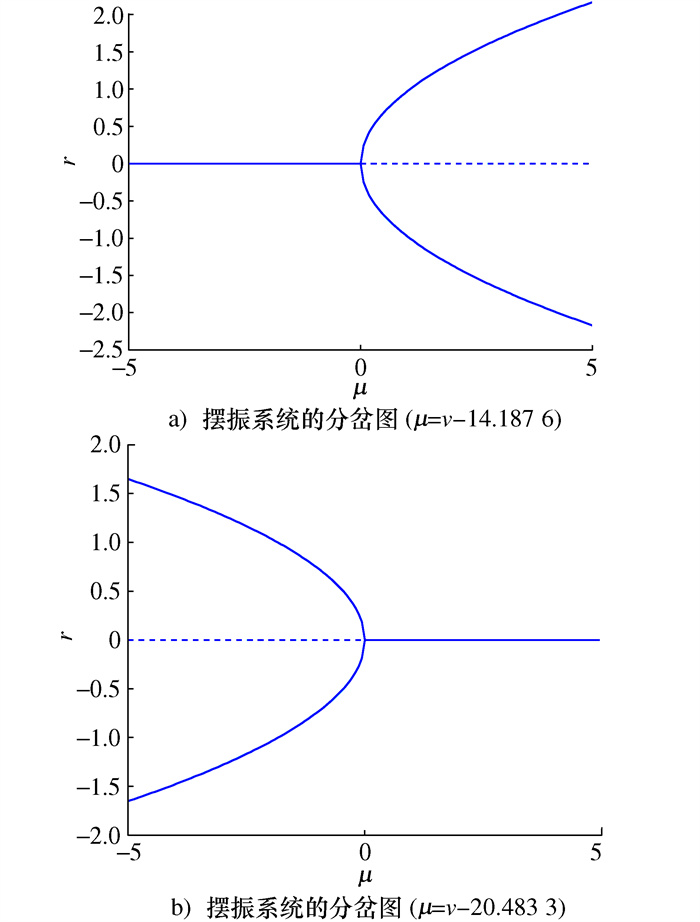
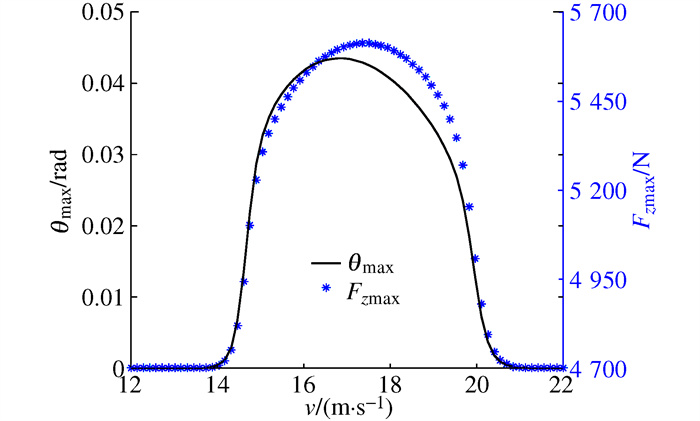
In order to analyze the instability mechanism of vehicle shimmy system, the right front wheel of a sample vehicle is taken as an example, based on the dynamic model for a quarter vehicle system, a three degrees-of-freedom dynamic model for single-wheel shimmy system is established by using the second Lagrange equation. According to the system state equation, the critical instability speed of the shimmy system is solved by applying Hurwitz criterion, and the eigenvalues of the shimmy system are obtained at the critical speed. The results show that the system equilibrium point at the critical instability speed is a non hyperbolic equilibrium point, then the vehicle speed is selected as a bifurcation parameter, and the two-dimensional center manifold is obtained by means of the center manifold theory. On this basis, the Hopf bifurcation characteristic of the shimmy system is analyzed and the analytical solution of the shimmy system is derived. Finally, with the help of four-level and five-parameter orthogonal experiments, the sensitivity of the structural parameters of the steering system and suspension system to the critical instability speed of the system is analyzed and the analytical solution of the shimmy system is derived. Finally, with the help of four-level and suspension system to the critical instability speed of the system is obtained. The study found that the critical instability speed of the shimmy system is the most sensitive to caster angle, followed by the damping of the steering system and the suspension system. Therefore, in engineering, it should be given priority to attenuate vehicle shimmy by adjusting caster angle.
In order to analyze the instability mechanism of vehicle shimmy system, the right front wheel of a sample vehicle is taken as an example, based on the dynamic model for a quarter vehicle system, a three degrees-of-freedom dynamic model for single-wheel shimmy system is established by using the second Lagrange equation. According to the system state equation, the critical instability speed of the shimmy system is solved by applying Hurwitz criterion, and the eigenvalues of the shimmy system are obtained at the critical speed. The results show that the system equilibrium point at the critical instability speed is a non hyperbolic equilibrium point, then the vehicle speed is selected as a bifurcation parameter, and the two-dimensional center manifold is obtained by means of the center manifold theory. On this basis, the Hopf bifurcation characteristic of the shimmy system is analyzed and the analytical solution of the shimmy system is derived. Finally, with the help of four-level and five-parameter orthogonal experiments, the sensitivity of the structural parameters of the steering system and suspension system to the critical instability speed of the system is analyzed and the analytical solution of the shimmy system is derived. Finally, with the help of four-level and suspension system to the critical instability speed of the system is obtained. The study found that the critical instability speed of the shimmy system is the most sensitive to caster angle, followed by the damping of the steering system and the suspension system. Therefore, in engineering, it should be given priority to attenuate vehicle shimmy by adjusting caster angle.



2023, 42(4): 566-572.
doi: 10.13433/j.cnki.1003-8728.20200643
Abstract:
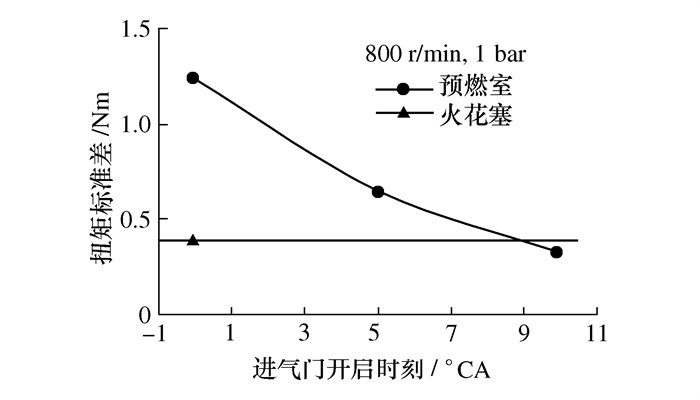
Passive pre-chamber jet ignition is an effective means to improve the thermal efficiency of gasoline engines. In order to study and improve the passive pre-chamber combustion stability at the low-temperature cold start and low-load, several passive pre-chambers with different volume, orifice area, material, and orifice structure was designed and installed on a turbocharged gasoline engine. Low temperature cold start test, low speed and low load combustion stability test were carried out. The results show that the passive pre-chamber volume, the orifice area, the material and the orifice structure have significant effects on the cold start performance. When the volume of the pre-chamber is small, the proportion of quenching layer in the pre-chamber volume is large, and the mixture in the pre-chamber is small. The smaller orifice or orifice area increases the residual exhaust gas in the pre-chamber. The rotating orifice makes the exhaust gas in the pre-chamber stratified, and the proportion of exhaust gas near the spark plug is large. The high thermal conductivity material makes the pre-chamber heat dissipation faster during cold start. Therefore, small volume, small orifice, high thermal conductivity and rotating orifice are not conducive to the cold start of the engine. The optimized structure of the passive pre-combustion chamber can realize the stable cold start at -20 ℃ to -8 ℃. Ignition timing and exhaust VVT have little effect on the combustion stability of the engine. The intake VVT has a great influence on the combustion stability of the pre-chamber. The opening of the intake valve is delayed, and the turbulent kinetic energy in the cylinder becomes stronger near the top dead center. On the other hand, the actual compression ratio of the engine becomes larger, the proportion of the fresh air-fuel mixture pressed into the pre-chamber is increased, and the combustion stability of the pre-chamber is significantly improved.
Passive pre-chamber jet ignition is an effective means to improve the thermal efficiency of gasoline engines. In order to study and improve the passive pre-chamber combustion stability at the low-temperature cold start and low-load, several passive pre-chambers with different volume, orifice area, material, and orifice structure was designed and installed on a turbocharged gasoline engine. Low temperature cold start test, low speed and low load combustion stability test were carried out. The results show that the passive pre-chamber volume, the orifice area, the material and the orifice structure have significant effects on the cold start performance. When the volume of the pre-chamber is small, the proportion of quenching layer in the pre-chamber volume is large, and the mixture in the pre-chamber is small. The smaller orifice or orifice area increases the residual exhaust gas in the pre-chamber. The rotating orifice makes the exhaust gas in the pre-chamber stratified, and the proportion of exhaust gas near the spark plug is large. The high thermal conductivity material makes the pre-chamber heat dissipation faster during cold start. Therefore, small volume, small orifice, high thermal conductivity and rotating orifice are not conducive to the cold start of the engine. The optimized structure of the passive pre-combustion chamber can realize the stable cold start at -20 ℃ to -8 ℃. Ignition timing and exhaust VVT have little effect on the combustion stability of the engine. The intake VVT has a great influence on the combustion stability of the pre-chamber. The opening of the intake valve is delayed, and the turbulent kinetic energy in the cylinder becomes stronger near the top dead center. On the other hand, the actual compression ratio of the engine becomes larger, the proportion of the fresh air-fuel mixture pressed into the pre-chamber is increased, and the combustion stability of the pre-chamber is significantly improved.









2023, 42(4): 573-579.
doi: 10.13433/j.cnki.1003-8728.20200636
Abstract:
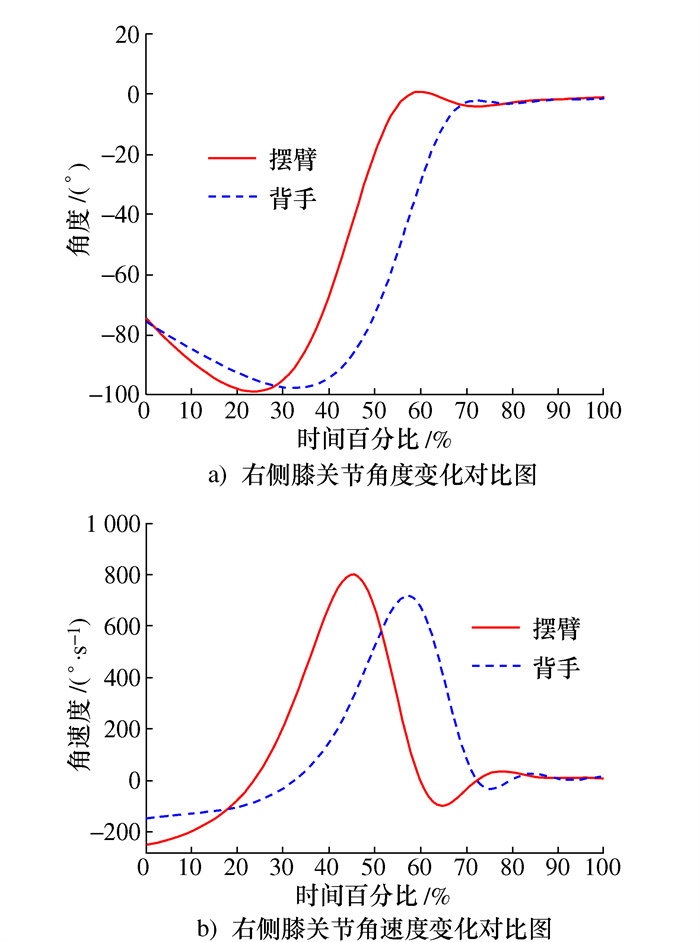
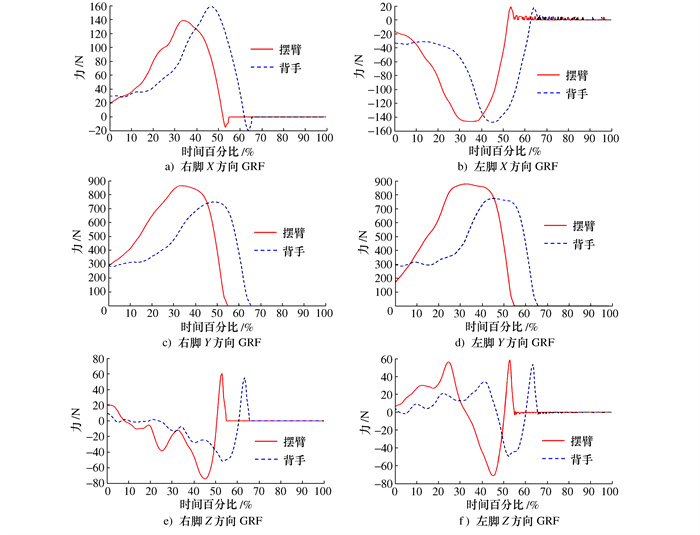
The simulation model of a human body′s skeletal muscles including four limbs is established with the OpenSim software. The effects of upper and lower limb coordination on jumping ability, which is achieved by testing the two in-situ vertical jumps of swing arm and back hand with the Vicon camera is illustrated. The Kistler platform and electromyography are simultaneously used. Several methods including inverse kinematics and inverse dynamics ultimately demonstrate the effects of four limbs on their in-situ vertical jump. The study confirms the reliability of the musculoskeletal simulation model established in the paper. The deltoid anterior bundle contributes greatly to the improvement of the center of gravity in the swing arm′s vertical jump. The paper may help the design of the booster exoskeleton of the upper and lower limb.
The simulation model of a human body′s skeletal muscles including four limbs is established with the OpenSim software. The effects of upper and lower limb coordination on jumping ability, which is achieved by testing the two in-situ vertical jumps of swing arm and back hand with the Vicon camera is illustrated. The Kistler platform and electromyography are simultaneously used. Several methods including inverse kinematics and inverse dynamics ultimately demonstrate the effects of four limbs on their in-situ vertical jump. The study confirms the reliability of the musculoskeletal simulation model established in the paper. The deltoid anterior bundle contributes greatly to the improvement of the center of gravity in the swing arm′s vertical jump. The paper may help the design of the booster exoskeleton of the upper and lower limb.







2023, 42(4): 580-584.
doi: 10.13433/j.cnki.1003-8728.20220060
Abstract:
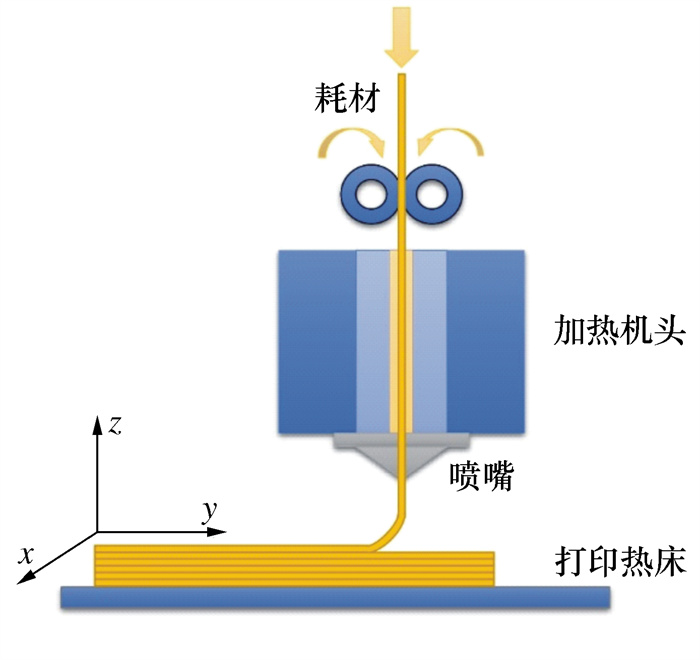
Using acrylonitrile-butadiene-styrene (ABS) as matrix and HGB, GF, ZnO, TiO and Al2O3 as modified fillers, five different modified ABS composites were prepared. Then, the modified ABS material specimens were printed using FDM 3D printer and the mechanical properties of specimens were measured. According to the measured results, their stress-strain curves were drawn, and the effect of the different fillers on the mechanical properties of ABS-printed specimens were compared and analyzed in detail. Findings show that, compared with pure ABS, the addition of HGB improves Young′s modulus of ABS-printed specimens, but there is a decrease in the tensile strength and elongation at break. The filling of GF increases the tensile strength, Young′s modulus and elongation at break of ABS. The filling of ZnO, TiO and Al2O3 nano-particles can significantly increase the tensile strength, Young′s modulus and elongation at break of ABS than GF, and the filling of TiO has the most significant effect on increasing the tensile strength of ABS and an increase of 35.33% in tensile strength is obtained by the filling of TiO.
Using acrylonitrile-butadiene-styrene (ABS) as matrix and HGB, GF, ZnO, TiO and Al2O3 as modified fillers, five different modified ABS composites were prepared. Then, the modified ABS material specimens were printed using FDM 3D printer and the mechanical properties of specimens were measured. According to the measured results, their stress-strain curves were drawn, and the effect of the different fillers on the mechanical properties of ABS-printed specimens were compared and analyzed in detail. Findings show that, compared with pure ABS, the addition of HGB improves Young′s modulus of ABS-printed specimens, but there is a decrease in the tensile strength and elongation at break. The filling of GF increases the tensile strength, Young′s modulus and elongation at break of ABS. The filling of ZnO, TiO and Al2O3 nano-particles can significantly increase the tensile strength, Young′s modulus and elongation at break of ABS than GF, and the filling of TiO has the most significant effect on increasing the tensile strength of ABS and an increase of 35.33% in tensile strength is obtained by the filling of TiO.






2023, 42(4): 585-591.
doi: 10.13433/j.cnki.1003-8728.20200630
Abstract:
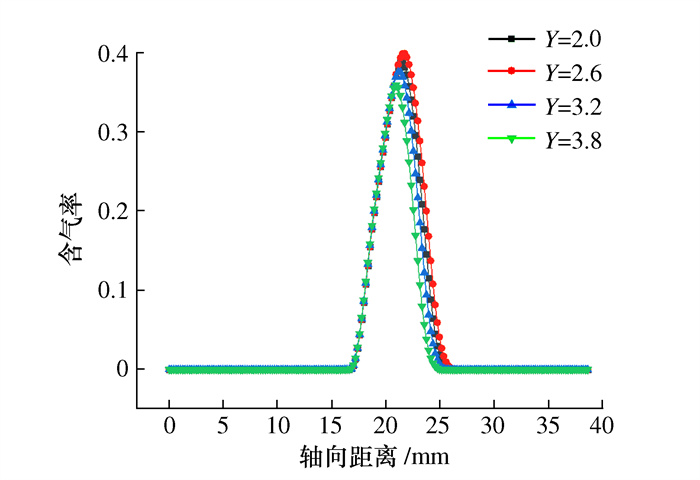
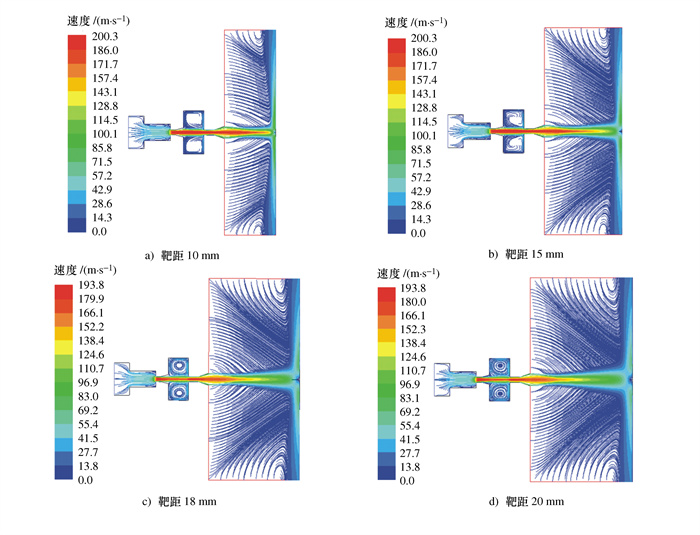
On the basis of the nozzle of organ pipe, a resonant cavity was connected in series to form a double-chamber self-excited oscillating pulse nozzle. The flow field was numerically simulated by Fluent, and the effects of jet target distance, cavity length ratio and cavity diameter ratio on the flow field of cavitation jet were analyzed. The results show that either the cavity length ratio is too large or too small will affect the formation of vortex ring structure, and then affect the cavitation effect. When the cavity length ratio is 0.77 and the cavity diameter ratio is 2.6, the vortex ring structure in the resonator has good symmetry, high axial gas holding ratio and high jet velocity, and the structure is conducive to improving the cleaning efficiency. The stagnation pressure of the target surface can also affect the cavitation effect. When the jet target distance is small, no vortex ring structure is generated in the secondary resonator under the action of stagnation pressure, and the axial gas holdup is low. When the target distance is increased to 18 mm, the influence of the time delay pressure is reduced and the axial gas holdup is significantly increased. Therefore, the cleaning target distance should be at least 18 mm. However, the increase of target distance will reduce the kinetic energy of jet reaching the target surface in turn, so the optimal target distance should be 18 mm.
On the basis of the nozzle of organ pipe, a resonant cavity was connected in series to form a double-chamber self-excited oscillating pulse nozzle. The flow field was numerically simulated by Fluent, and the effects of jet target distance, cavity length ratio and cavity diameter ratio on the flow field of cavitation jet were analyzed. The results show that either the cavity length ratio is too large or too small will affect the formation of vortex ring structure, and then affect the cavitation effect. When the cavity length ratio is 0.77 and the cavity diameter ratio is 2.6, the vortex ring structure in the resonator has good symmetry, high axial gas holding ratio and high jet velocity, and the structure is conducive to improving the cleaning efficiency. The stagnation pressure of the target surface can also affect the cavitation effect. When the jet target distance is small, no vortex ring structure is generated in the secondary resonator under the action of stagnation pressure, and the axial gas holdup is low. When the target distance is increased to 18 mm, the influence of the time delay pressure is reduced and the axial gas holdup is significantly increased. Therefore, the cleaning target distance should be at least 18 mm. However, the increase of target distance will reduce the kinetic energy of jet reaching the target surface in turn, so the optimal target distance should be 18 mm.








2023, 42(4): 592-596.
doi: 10.13433/j.cnki.1003-8728.20230102
Abstract:
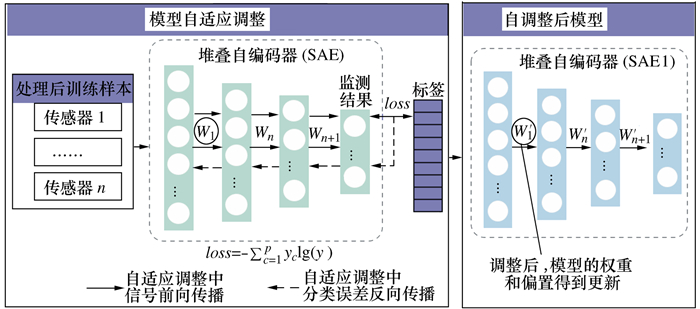
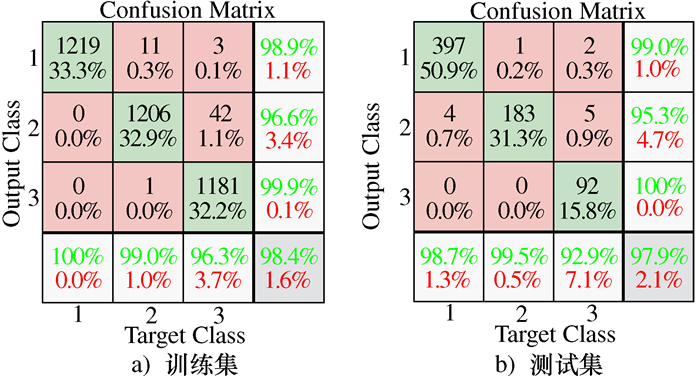
To solve the sensor fault leading to failure of monitoring model for multi-sensor monitoring scenarios, an adaptive fast adjustment method of stacked autoencoder (SAE) deep learning model is proposed in this paper. The original data set was adjusted adaptively according to the distribution characteris-tics of the data collected during sensor fault, the weight and bias of the model are updated by using the adjusted data set forward propagation and the monitoring error back propagation to fine-tune model, and the adaptive fast adjustment of the monitoring model was realized. Taking tool wear monitoring in machining as an example, the effectiveness of the proposed method was verified with the data set provided by the BEST lab at UC Berkeley. The results show that the adaptively adjusted monitoring model can accurately monitor the tool state under the condition that the real-time monitoring is not interrupted when the sensor breaks down suddenly.
To solve the sensor fault leading to failure of monitoring model for multi-sensor monitoring scenarios, an adaptive fast adjustment method of stacked autoencoder (SAE) deep learning model is proposed in this paper. The original data set was adjusted adaptively according to the distribution characteris-tics of the data collected during sensor fault, the weight and bias of the model are updated by using the adjusted data set forward propagation and the monitoring error back propagation to fine-tune model, and the adaptive fast adjustment of the monitoring model was realized. Taking tool wear monitoring in machining as an example, the effectiveness of the proposed method was verified with the data set provided by the BEST lab at UC Berkeley. The results show that the adaptively adjusted monitoring model can accurately monitor the tool state under the condition that the real-time monitoring is not interrupted when the sensor breaks down suddenly.



2023, 42(4): 597-607.
doi: 10.13433/j.cnki.1003-8728.20200623
Abstract:
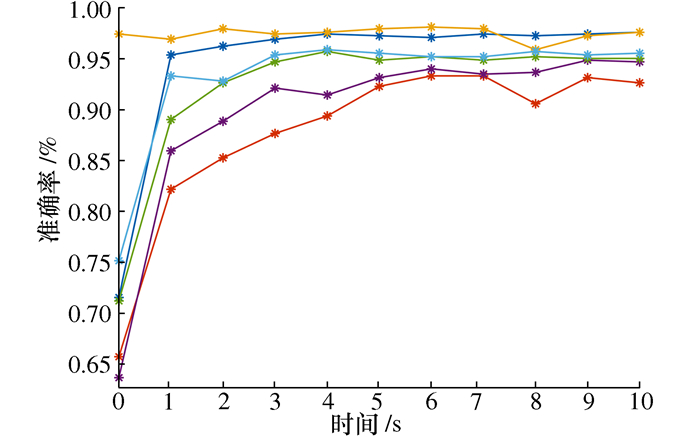
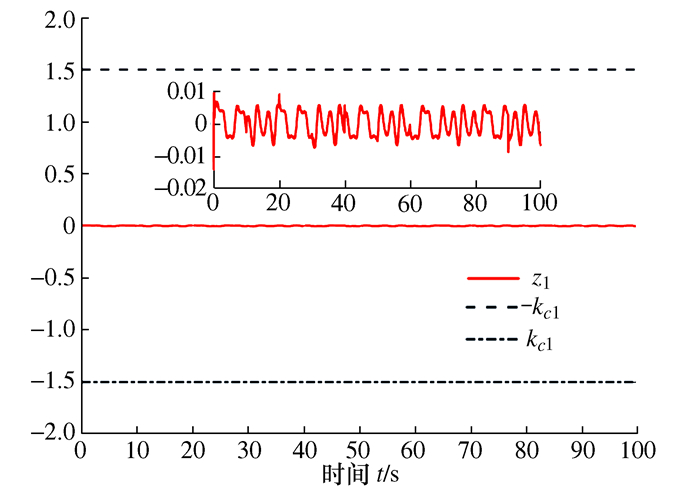
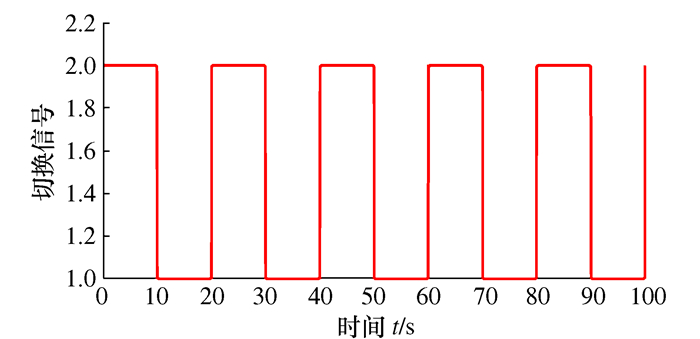
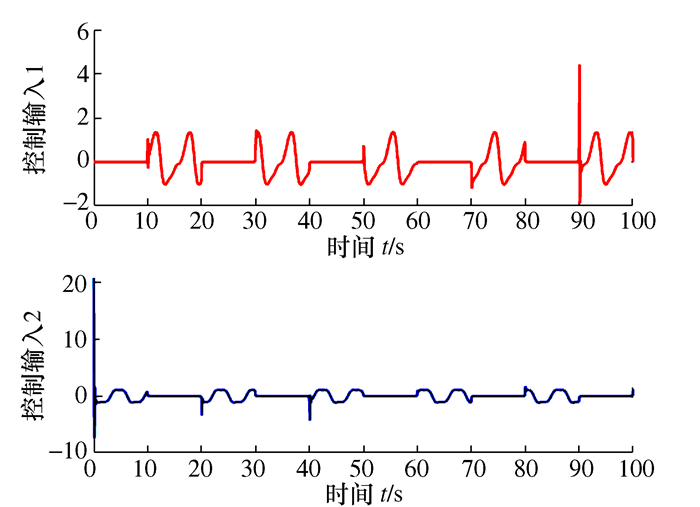
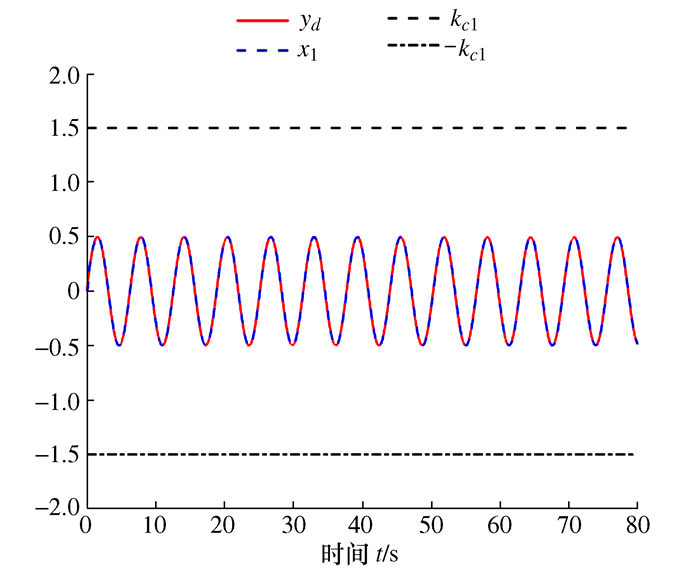
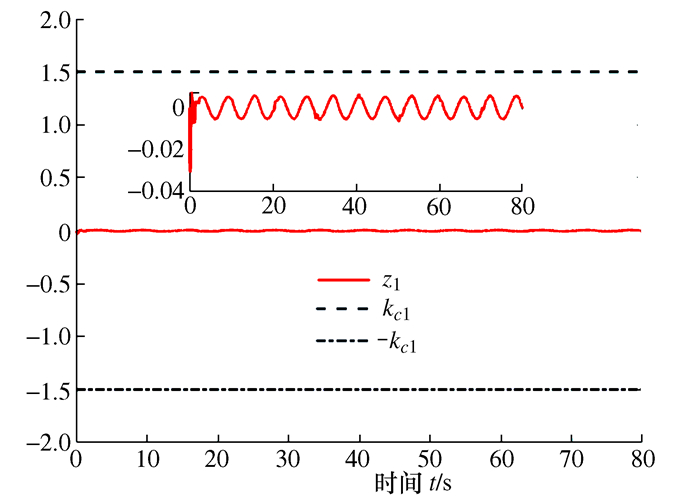
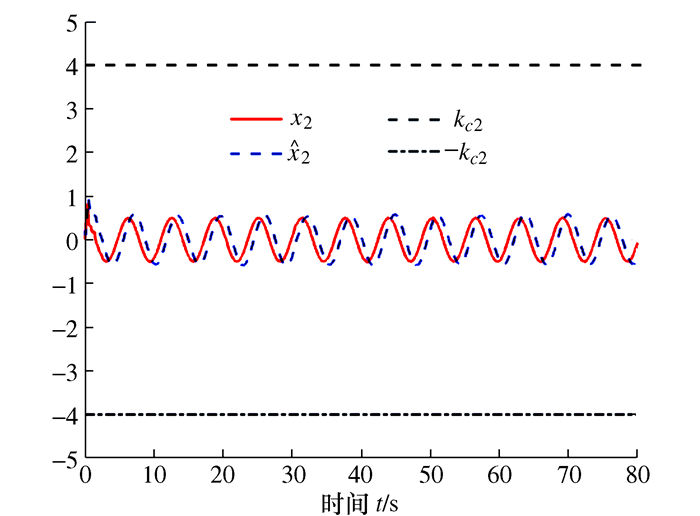
In order to control manipulator switching with state constraints, this paper studies a class of strict-feedback nonlinear switching systems with full state constraints and incompletely measurable states. By introducing state observer, adaptive neural network and dynamic surface control technique, an adaptive output feedback control method based on the radial basis function (RBF) neural network is designed. The Lyapunov method and the average dwell time theory (ADT) are used to ensure that all signals in the closed-loop system are uniformly ultimately bounded. Numerical examples show the effectiveness of the semi-globally proposed method. Finally, the mechanical arm with motor drive is simulated, and the simulation results show that the trajectory tracking error of the manipulator is very small and has good control accuracy and that the proposed control method can be applied to actual engineering models.
In order to control manipulator switching with state constraints, this paper studies a class of strict-feedback nonlinear switching systems with full state constraints and incompletely measurable states. By introducing state observer, adaptive neural network and dynamic surface control technique, an adaptive output feedback control method based on the radial basis function (RBF) neural network is designed. The Lyapunov method and the average dwell time theory (ADT) are used to ensure that all signals in the closed-loop system are uniformly ultimately bounded. Numerical examples show the effectiveness of the semi-globally proposed method. Finally, the mechanical arm with motor drive is simulated, and the simulation results show that the trajectory tracking error of the manipulator is very small and has good control accuracy and that the proposed control method can be applied to actual engineering models.







2023, 42(4): 608-614.
doi: 10.13433/j.cnki.1003-8728.20200635
Abstract:
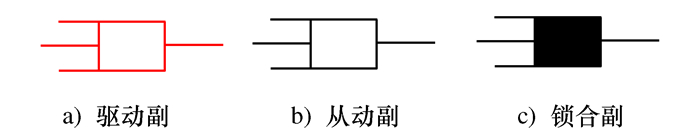
A novel 9-3 reconfigurable parallel mechanism with zero coupling degree and three redundant branches was designed in this paper. Based on the theory and method of topology design of the position and orientation characteristic equation, a modular formula for topology analysis of the parallel mechanism was established, and topological characteristics of the mechanism and reconstructed configuration are analyzed. Based on a metamorphic mobile pair which can convert the master and slave movements and lock, the type 9-3 reconfigurable parallel mechanisms were converted into two configurations, 6-3A and 6-3B, with active mode and driven mode, and their topological indices were calculated. The results show that the coupling degree of 6-3A and 6-3B is 0 and 1, respectively. Furthermore, the 6-3A parallel mechanism was reconstructed to obtain the low-degree of freedom parallel mechanism. A total of 5 classes and 12 configurations were listed. In particular, a three-degree of freedom reconstruction configuration as example, its topological properties are analyzed in detail.
A novel 9-3 reconfigurable parallel mechanism with zero coupling degree and three redundant branches was designed in this paper. Based on the theory and method of topology design of the position and orientation characteristic equation, a modular formula for topology analysis of the parallel mechanism was established, and topological characteristics of the mechanism and reconstructed configuration are analyzed. Based on a metamorphic mobile pair which can convert the master and slave movements and lock, the type 9-3 reconfigurable parallel mechanisms were converted into two configurations, 6-3A and 6-3B, with active mode and driven mode, and their topological indices were calculated. The results show that the coupling degree of 6-3A and 6-3B is 0 and 1, respectively. Furthermore, the 6-3A parallel mechanism was reconstructed to obtain the low-degree of freedom parallel mechanism. A total of 5 classes and 12 configurations were listed. In particular, a three-degree of freedom reconstruction configuration as example, its topological properties are analyzed in detail.








2023, 42(4): 615-621.
doi: 10.13433/j.cnki.1003-8728.20200644
Abstract:
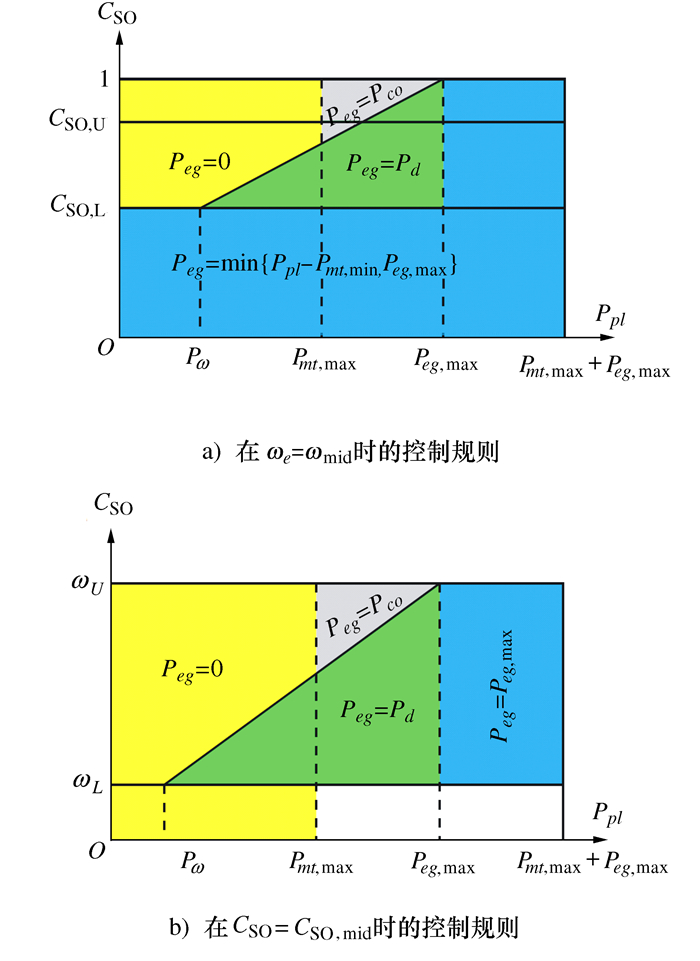
Aiming at the energy management problem of parallel hybrid electric vehicle, a new heuristic control strategy, namely load following threshold change strategy (LTS), was proposed in this paper. Based on the threshold change mechanism and load following method, the LTS control strategy can maintain a small deviation proportional to the battery charge state (SOC), which can effectively ensure the battery to run continuously and stably. Different from the current regular control strategy which also applies the threshold change mechanism, the LTS control strategy designed in this paper comprehensively adjusts the power output mode through the battery state of charge (SOC) and the engine speed, and its energy management is more refined. In order to verify the effectiveness of the LTS strategy, the proposed strategy was applied to the hybrid electric vehicle for simulation test, and its performance was compared with the traditional equivalent fuel consumption minimization strategy (ECMS) and the electric assisted control strategy (EACS). The results show that the LTS control strategy is superior to the EACS control strategy by 3.1%-10.4% in fuel economy, and the LTS control strategy is superior to the ECMS control strategy by 2.5%-5.7%. In terms of battery state of charge (SOC), the LTS control strategy can make the CSO value greater than 60%, and the battery has a good running state.
Aiming at the energy management problem of parallel hybrid electric vehicle, a new heuristic control strategy, namely load following threshold change strategy (LTS), was proposed in this paper. Based on the threshold change mechanism and load following method, the LTS control strategy can maintain a small deviation proportional to the battery charge state (SOC), which can effectively ensure the battery to run continuously and stably. Different from the current regular control strategy which also applies the threshold change mechanism, the LTS control strategy designed in this paper comprehensively adjusts the power output mode through the battery state of charge (SOC) and the engine speed, and its energy management is more refined. In order to verify the effectiveness of the LTS strategy, the proposed strategy was applied to the hybrid electric vehicle for simulation test, and its performance was compared with the traditional equivalent fuel consumption minimization strategy (ECMS) and the electric assisted control strategy (EACS). The results show that the LTS control strategy is superior to the EACS control strategy by 3.1%-10.4% in fuel economy, and the LTS control strategy is superior to the ECMS control strategy by 2.5%-5.7%. In terms of battery state of charge (SOC), the LTS control strategy can make the CSO value greater than 60%, and the battery has a good running state.








2023, 42(4): 622-628.
doi: 10.13433/j.cnki.1003-8728.20200637
Abstract:
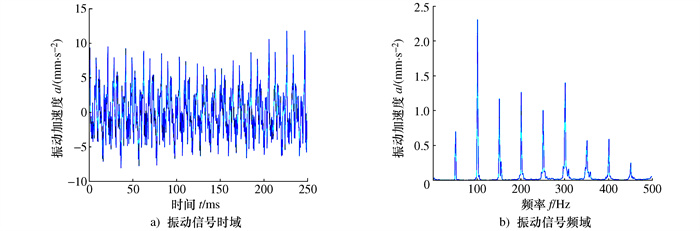
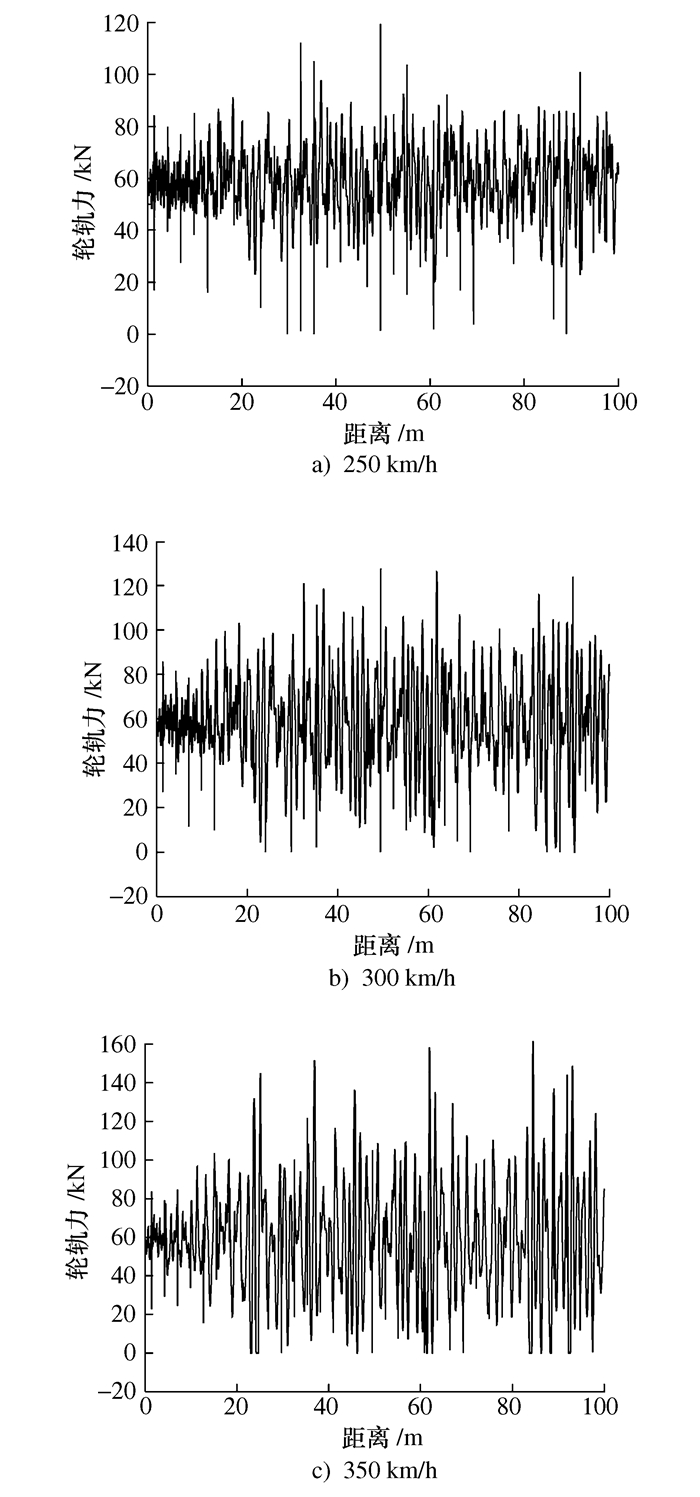
Wheel flat is a typical fault of the wheel tread of a railway vehicle, which has a great influence on its stability and safety. At present, there is no uniform standard for the safety limit of wheel flat at different speeds. In this paper, a global wavelet packet decomposition method is used to deal with the random response of the wheel-rail force obtained with dynamic simulation. The energy coefficient of the random response of wheel-rail force is extracted as the evaluation index. The safety limits of wheel flat at different speeds are studied from the angle of energy characteristics and compared through extracting the maximum value, mean value and impulse factor of the random response of wheel-rail force as the evaluation index of safety limits of wheel flat in time domain. The results show that the wavelet packet energy coefficient can describe the wheel-rail force characteristics from the global perspective. The node energy coefficient shows the linearity of wheel-rail force, which can be used as the evaluation index of safety limits of high-speed railway wheel flat. The study shows that when the train speed is in the range of 150-250 km/h, the length of wheel flat should be controlled within 30 mm. When the train speed is in the range of 250-350 km/h, the length of wheel flat should be controlled within 25 mm.
Wheel flat is a typical fault of the wheel tread of a railway vehicle, which has a great influence on its stability and safety. At present, there is no uniform standard for the safety limit of wheel flat at different speeds. In this paper, a global wavelet packet decomposition method is used to deal with the random response of the wheel-rail force obtained with dynamic simulation. The energy coefficient of the random response of wheel-rail force is extracted as the evaluation index. The safety limits of wheel flat at different speeds are studied from the angle of energy characteristics and compared through extracting the maximum value, mean value and impulse factor of the random response of wheel-rail force as the evaluation index of safety limits of wheel flat in time domain. The results show that the wavelet packet energy coefficient can describe the wheel-rail force characteristics from the global perspective. The node energy coefficient shows the linearity of wheel-rail force, which can be used as the evaluation index of safety limits of high-speed railway wheel flat. The study shows that when the train speed is in the range of 150-250 km/h, the length of wheel flat should be controlled within 30 mm. When the train speed is in the range of 250-350 km/h, the length of wheel flat should be controlled within 25 mm.










2023, 42(4): 629-637.
doi: 10.13433/j.cnki.1003-8728.20200645
Abstract:
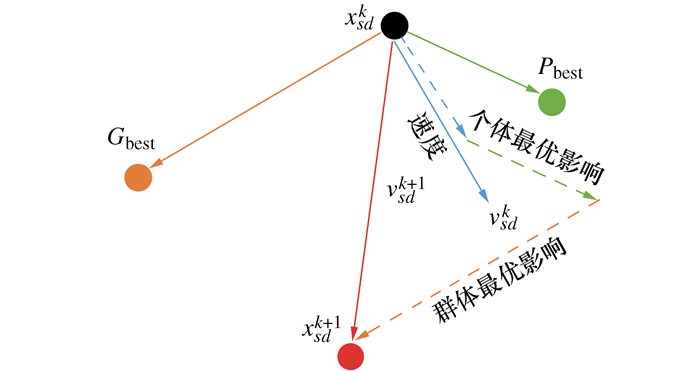
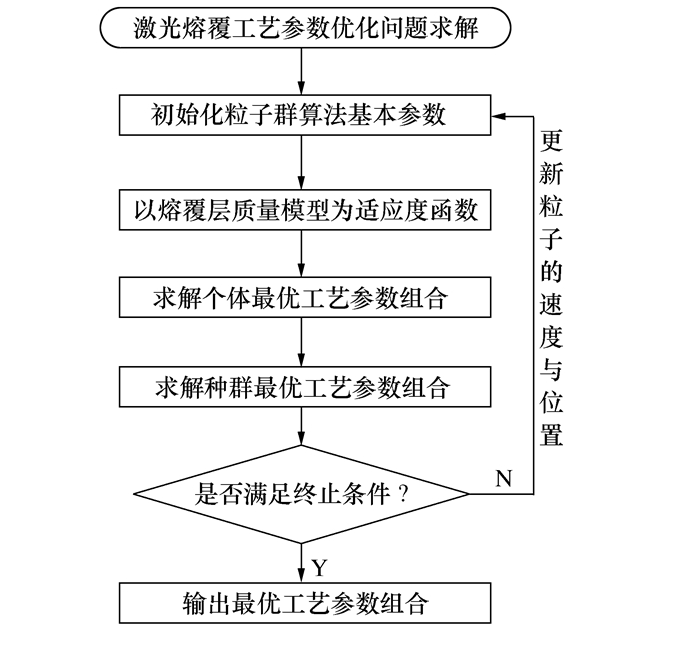
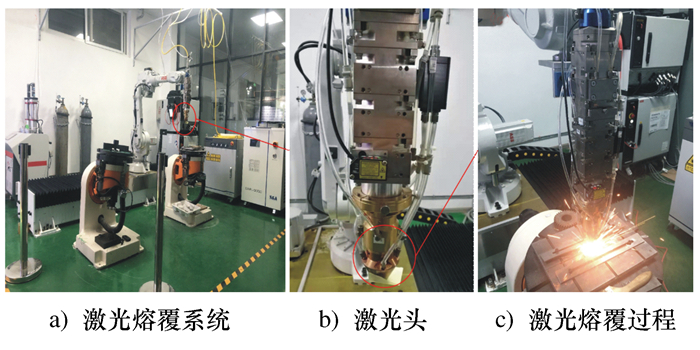
In order to prepare high-quality cladding layers and ensure the re-service life of remanufactured mechanical parts, a processing parameters optimization method in laser cladding by integrating response surface methodology and particle swarm optimization is proposed. The method takes the quality of the cladding layer as the optimization goal, and takes the processing parameters as the optimization variables, and the response surface approximate model between the process parameters and the quality of cladding layer according to the experimental results is built, and the particle swarm algorithm is used to obtain the optimal processing parameters combination. Finally, it was verified with the laser multi-pass cladding experiments. The results show that the optimized processing parameters of this method can effectively improve the quality of the cladding layer, thereby saving experimental costs and improving production efficiency.
In order to prepare high-quality cladding layers and ensure the re-service life of remanufactured mechanical parts, a processing parameters optimization method in laser cladding by integrating response surface methodology and particle swarm optimization is proposed. The method takes the quality of the cladding layer as the optimization goal, and takes the processing parameters as the optimization variables, and the response surface approximate model between the process parameters and the quality of cladding layer according to the experimental results is built, and the particle swarm algorithm is used to obtain the optimal processing parameters combination. Finally, it was verified with the laser multi-pass cladding experiments. The results show that the optimized processing parameters of this method can effectively improve the quality of the cladding layer, thereby saving experimental costs and improving production efficiency.









2023, 42(4): 638-643.
doi: 10.13433/j.cnki.1003-8728.20200641
Abstract:
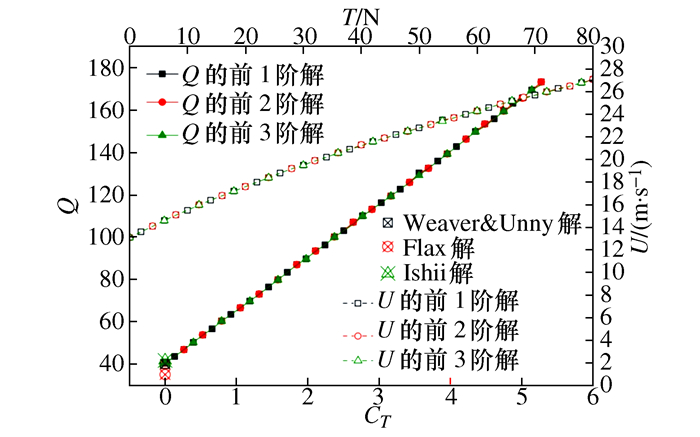
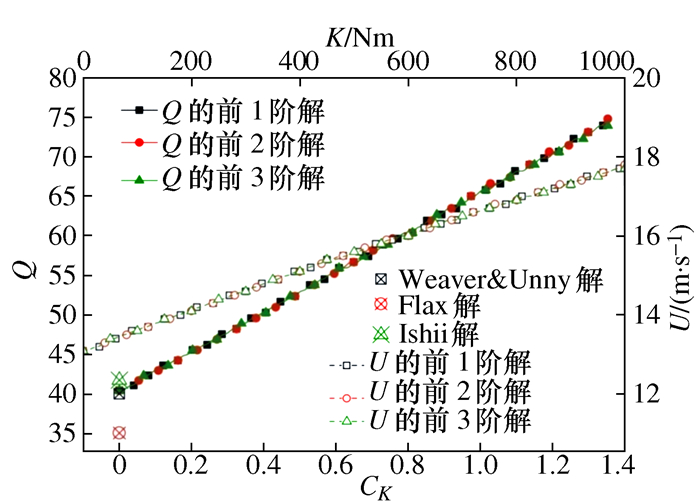
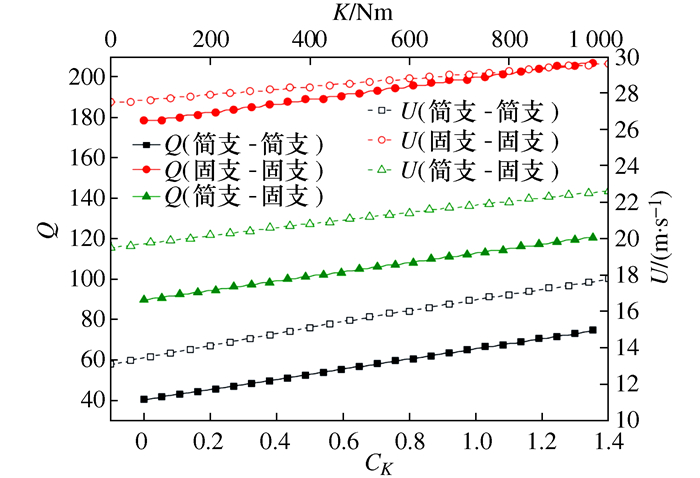
In this paper, the aeroelastic stability of cavity panel is analyzed. Based on potential flow theory, thin-wing theory and Galerkin method, a simplified method for solving instability modes is suggested, the instability boundary of the cavity panel under different boundary conditions (simple support-simple support, simple support-fixed support, fixed support-fixed support) is calculated, and the influence of many non-ideal factors (viscosity, turbulence, cavity wall) on instability boundary is analyzed. The result shows that at low Reynolds number (Re), the viscosity of fluid has evident stabilizing effect on the panel, however the viscous effect can be ignored only when Re≫2 000. The turbulence of fluid has strong influence on the critical velocity and the cavity wall has little influence on the instability boundary of the cavity panel.
In this paper, the aeroelastic stability of cavity panel is analyzed. Based on potential flow theory, thin-wing theory and Galerkin method, a simplified method for solving instability modes is suggested, the instability boundary of the cavity panel under different boundary conditions (simple support-simple support, simple support-fixed support, fixed support-fixed support) is calculated, and the influence of many non-ideal factors (viscosity, turbulence, cavity wall) on instability boundary is analyzed. The result shows that at low Reynolds number (Re), the viscosity of fluid has evident stabilizing effect on the panel, however the viscous effect can be ignored only when Re≫2 000. The turbulence of fluid has strong influence on the critical velocity and the cavity wall has little influence on the instability boundary of the cavity panel.






2023, 42(4): 644-650.
doi: 10.13433/j.cnki.1003-8728.20200620
Abstract:
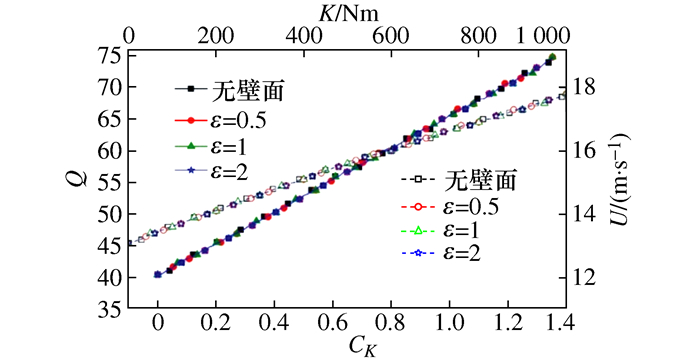
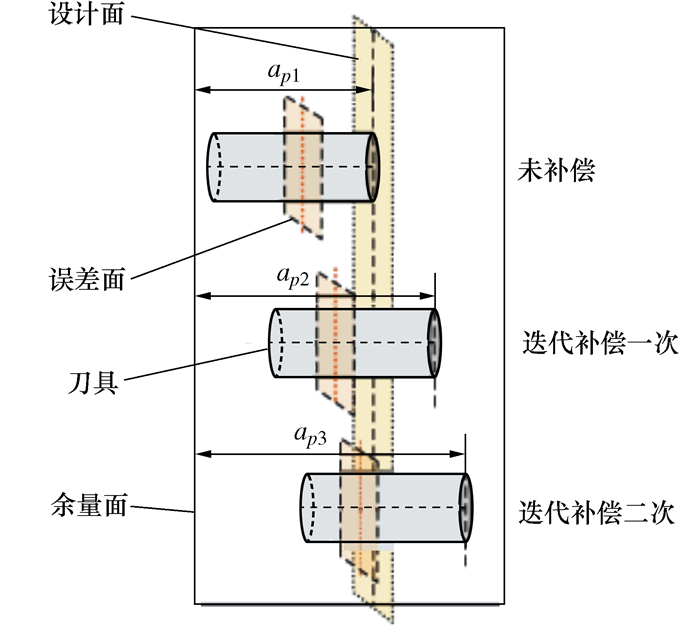
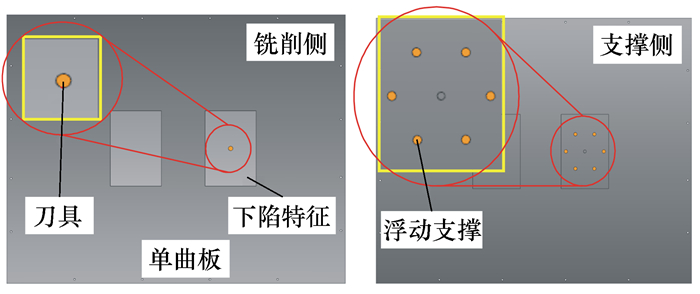
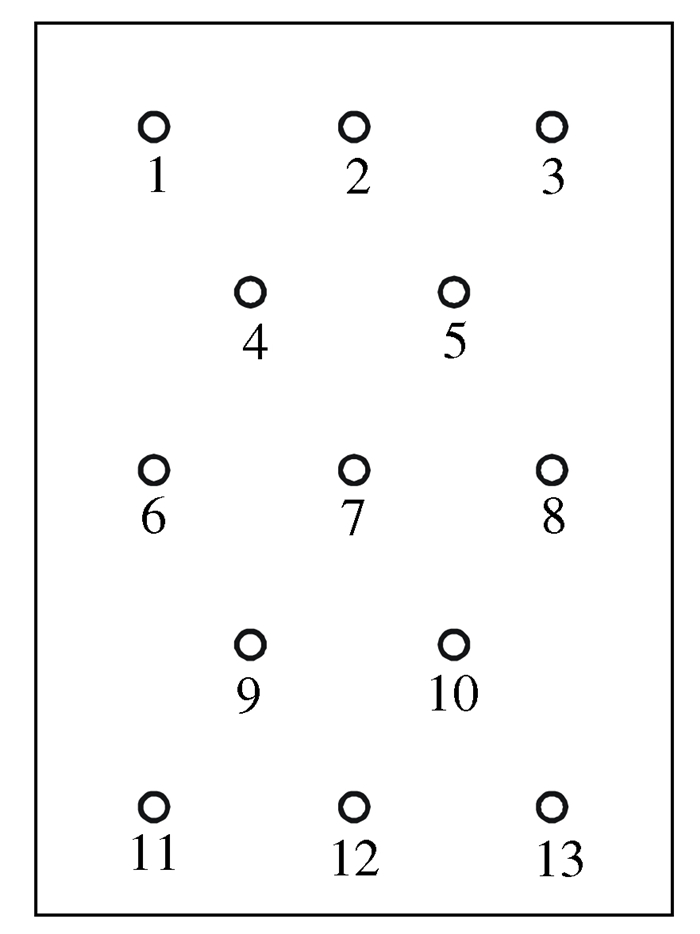
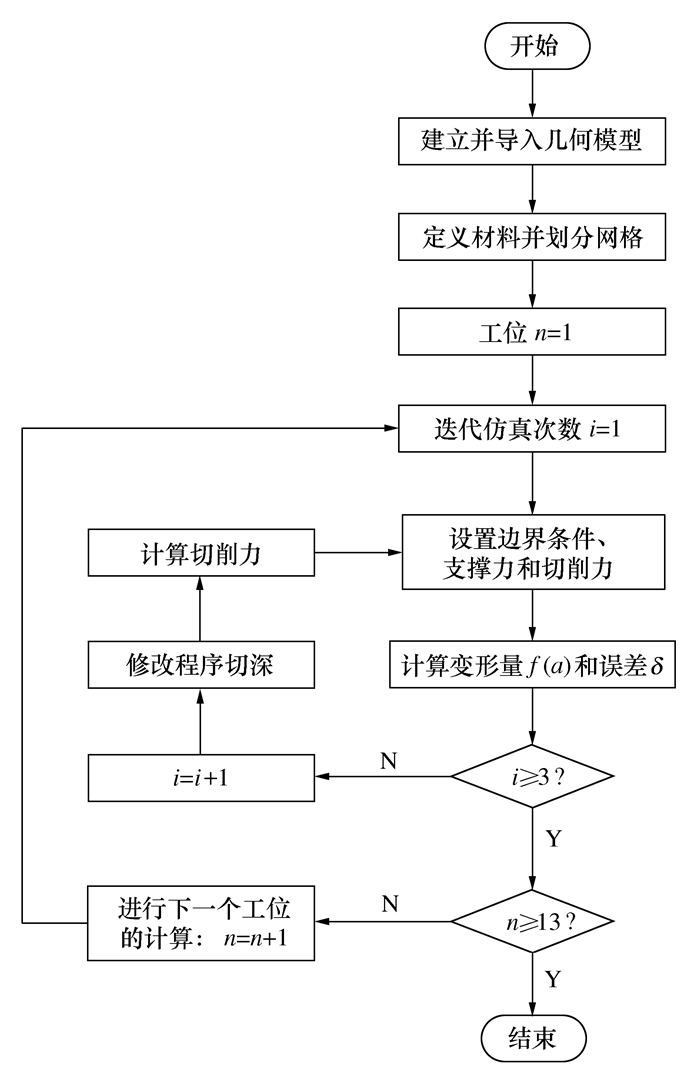
Aiming at the traditional error compensation method for aircraft skin in mirror machining has slow convergence speed and is difficult to achieve good compensation effect in large feed high-speed machining, a real-time compensation optimization method for skin error in mirror machining is proposed. Based on the two-point chord section method, with the help of the skin wall thickness and program cutting depth obtained by the ultrasonic thickness gauge twice before, the compensation value of the next point is calculated, and the machining error compensation is realized by controlling the motion of the compensation axis in mirror machining, which effectively improves the compensation effect of the aircraft skin in mirror milling and reduces the machining error. Finally, the superiority of this method is proved by using the finite element simulation and experiment. The maximum machining error is reduced by 41.67%, and the overall machining error is reduced by 41.96%.
Aiming at the traditional error compensation method for aircraft skin in mirror machining has slow convergence speed and is difficult to achieve good compensation effect in large feed high-speed machining, a real-time compensation optimization method for skin error in mirror machining is proposed. Based on the two-point chord section method, with the help of the skin wall thickness and program cutting depth obtained by the ultrasonic thickness gauge twice before, the compensation value of the next point is calculated, and the machining error compensation is realized by controlling the motion of the compensation axis in mirror machining, which effectively improves the compensation effect of the aircraft skin in mirror milling and reduces the machining error. Finally, the superiority of this method is proved by using the finite element simulation and experiment. The maximum machining error is reduced by 41.67%, and the overall machining error is reduced by 41.96%.










2023, 42(4): 651-656.
doi: 10.13433/j.cnki.1003-8728.20200391
Abstract:
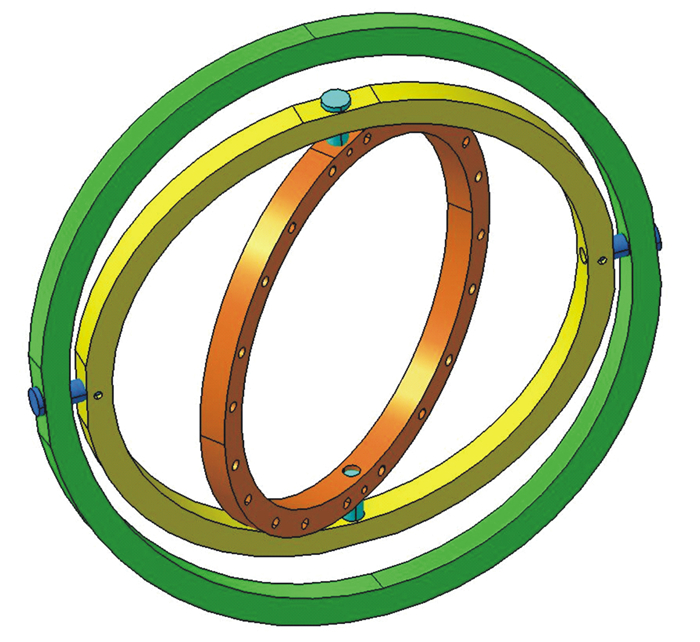
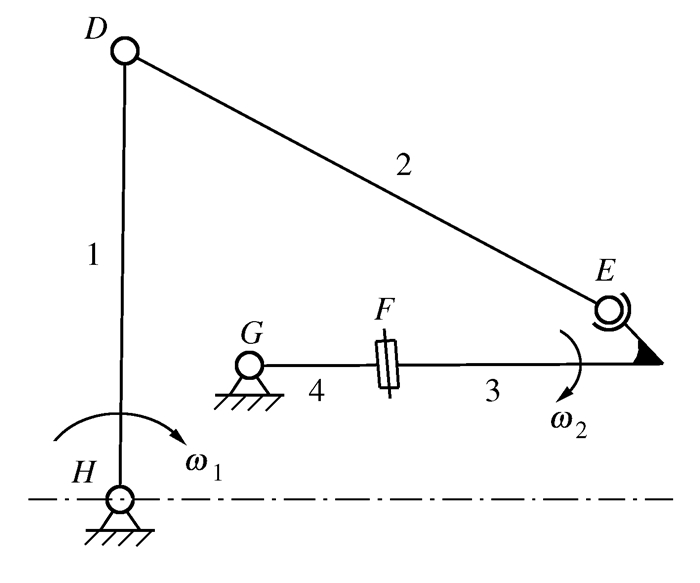
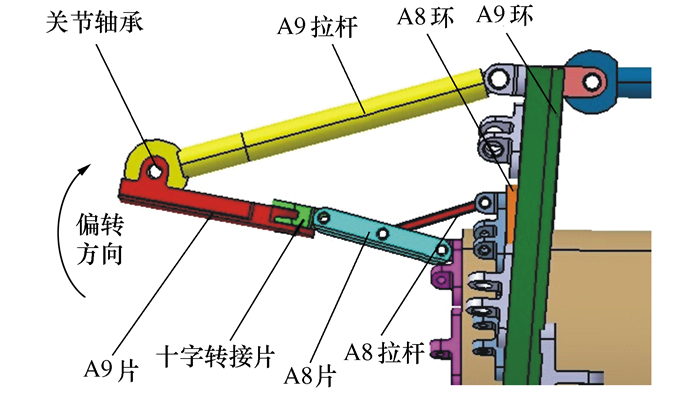
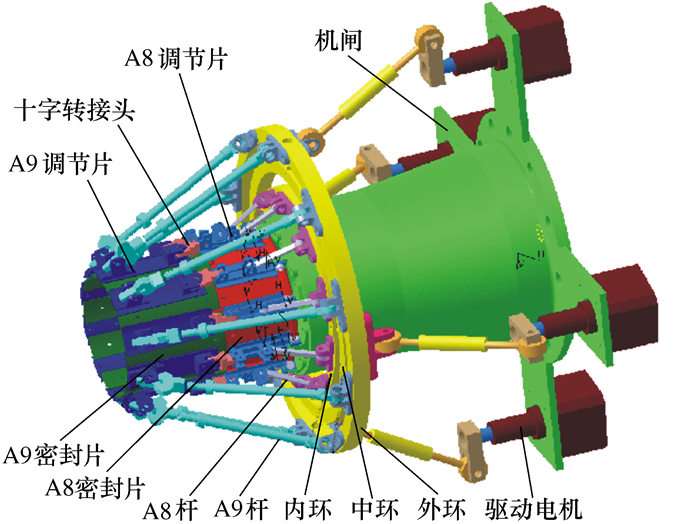
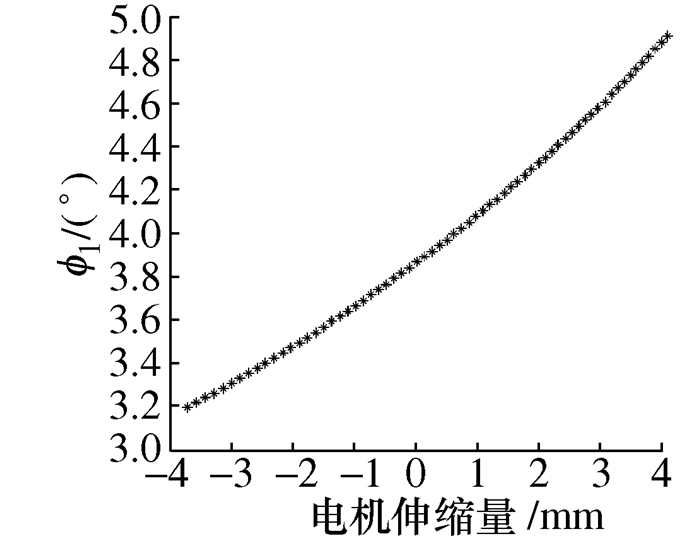
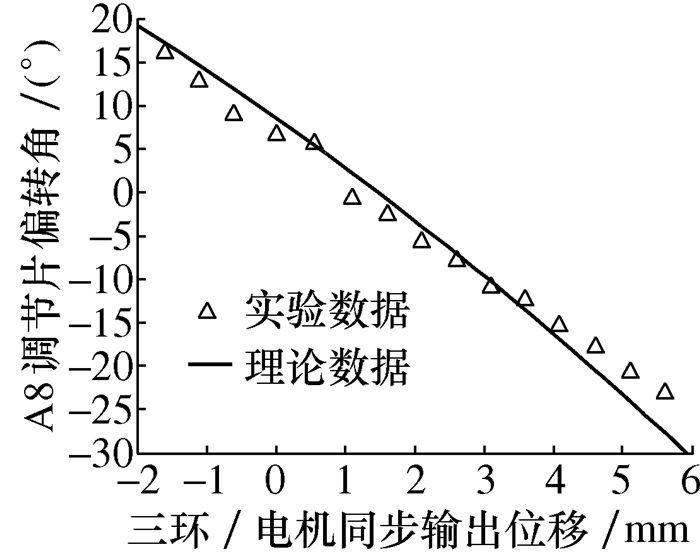
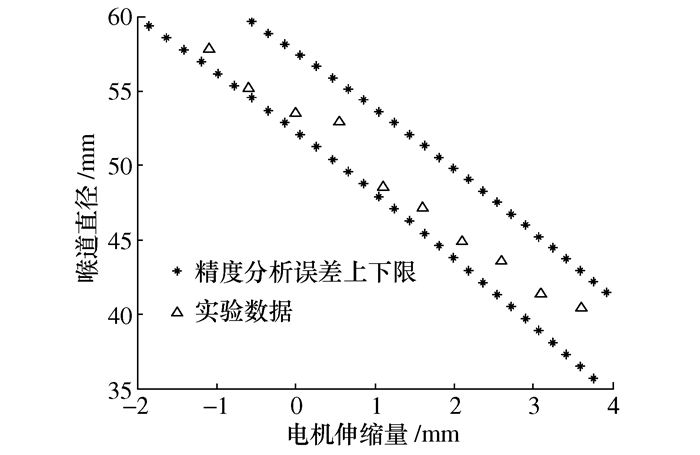
The thrust vector technology mainly realizes the vector control by adjusting the deflection of vector nozzle. The axisymmetric vector exhaust nozzle has the advantages of simple design of deflection mechanism and obvious effect of vector action. In order to study its motion law, the three-ring linkage transmission control structure is designed, the kinematics and precision analysis model of throat is established, and the influence of the position error of A8 two reaming holes, motor telescopic error, position error of two reaming holes and direction error of outer ring thickness on the error of throat channel is discussed. The experimental platform of vector nozzle is designed and built. With the non-vector motion experiment, the correctness of kinematics and precision analysis model is verified. This paper laid a foundation for further control analysis of throat and nozzle.
The thrust vector technology mainly realizes the vector control by adjusting the deflection of vector nozzle. The axisymmetric vector exhaust nozzle has the advantages of simple design of deflection mechanism and obvious effect of vector action. In order to study its motion law, the three-ring linkage transmission control structure is designed, the kinematics and precision analysis model of throat is established, and the influence of the position error of A8 two reaming holes, motor telescopic error, position error of two reaming holes and direction error of outer ring thickness on the error of throat channel is discussed. The experimental platform of vector nozzle is designed and built. With the non-vector motion experiment, the correctness of kinematics and precision analysis model is verified. This paper laid a foundation for further control analysis of throat and nozzle.