Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2022 Vol. 41, No. 4
Display Method:
2022, 41(4): 493-499.
doi: 10.13433/j.cnki.1003-8728.20200551
 PDF 4664KB
PDF 4664KB
Abstract:
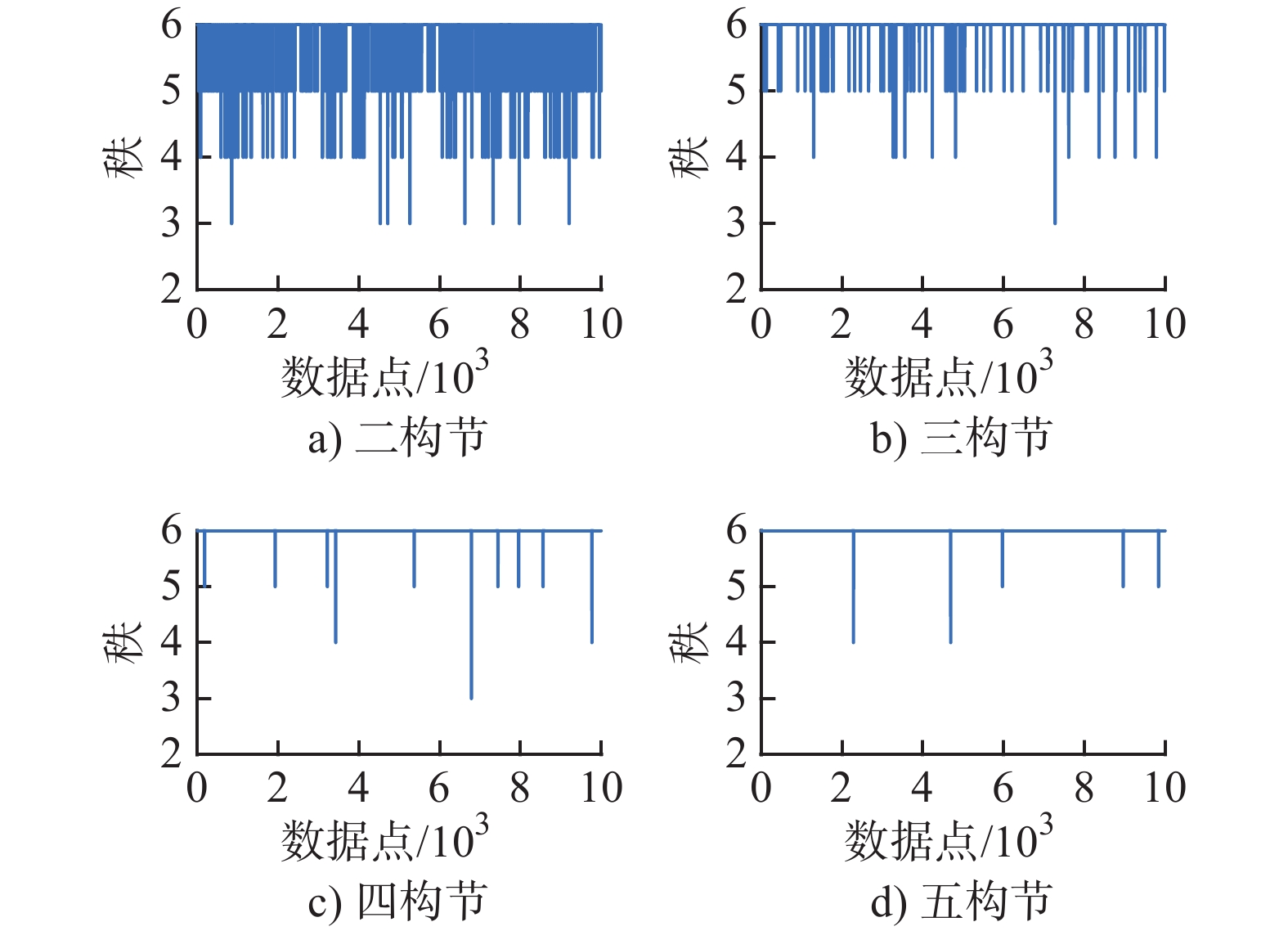
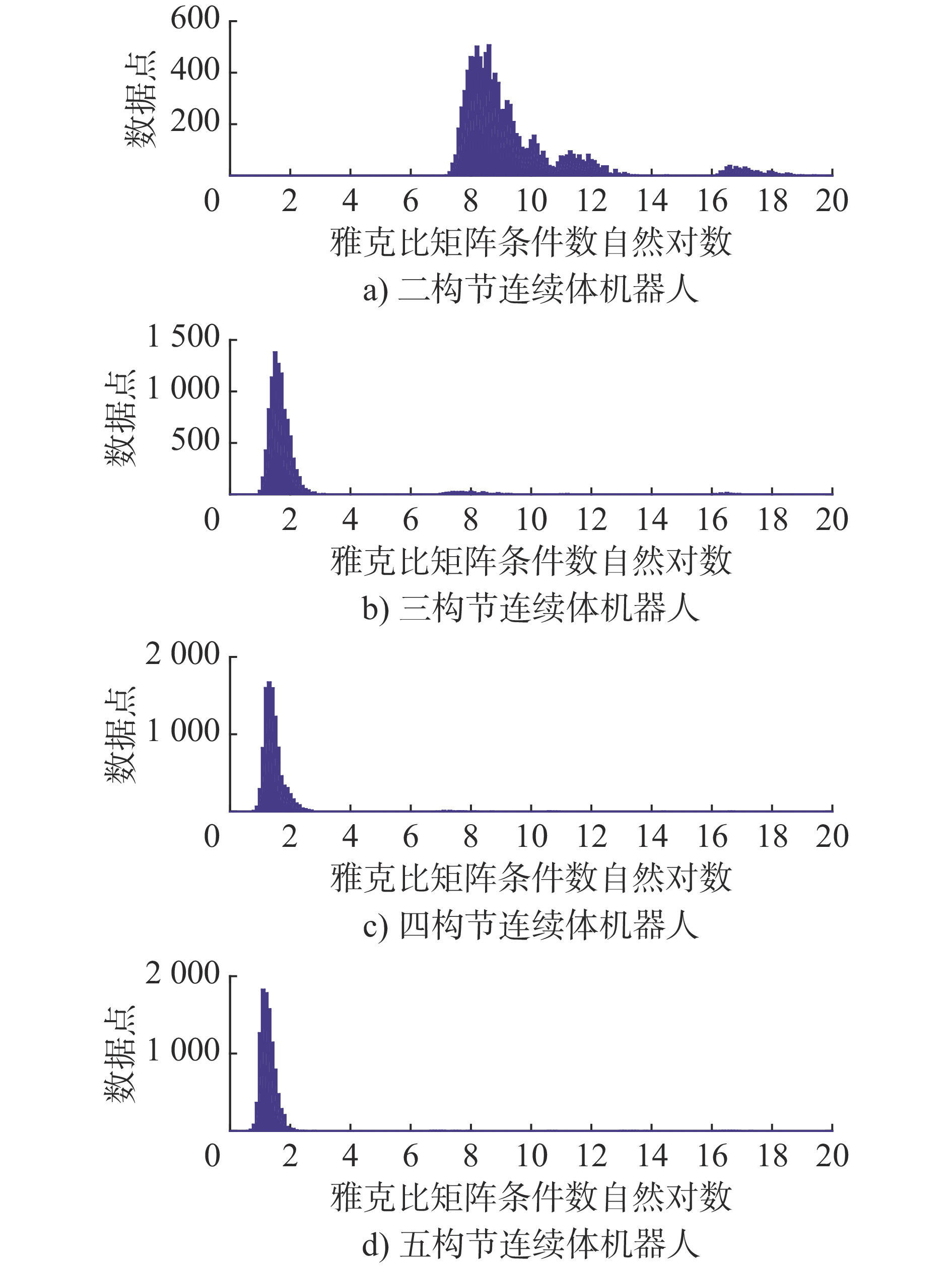
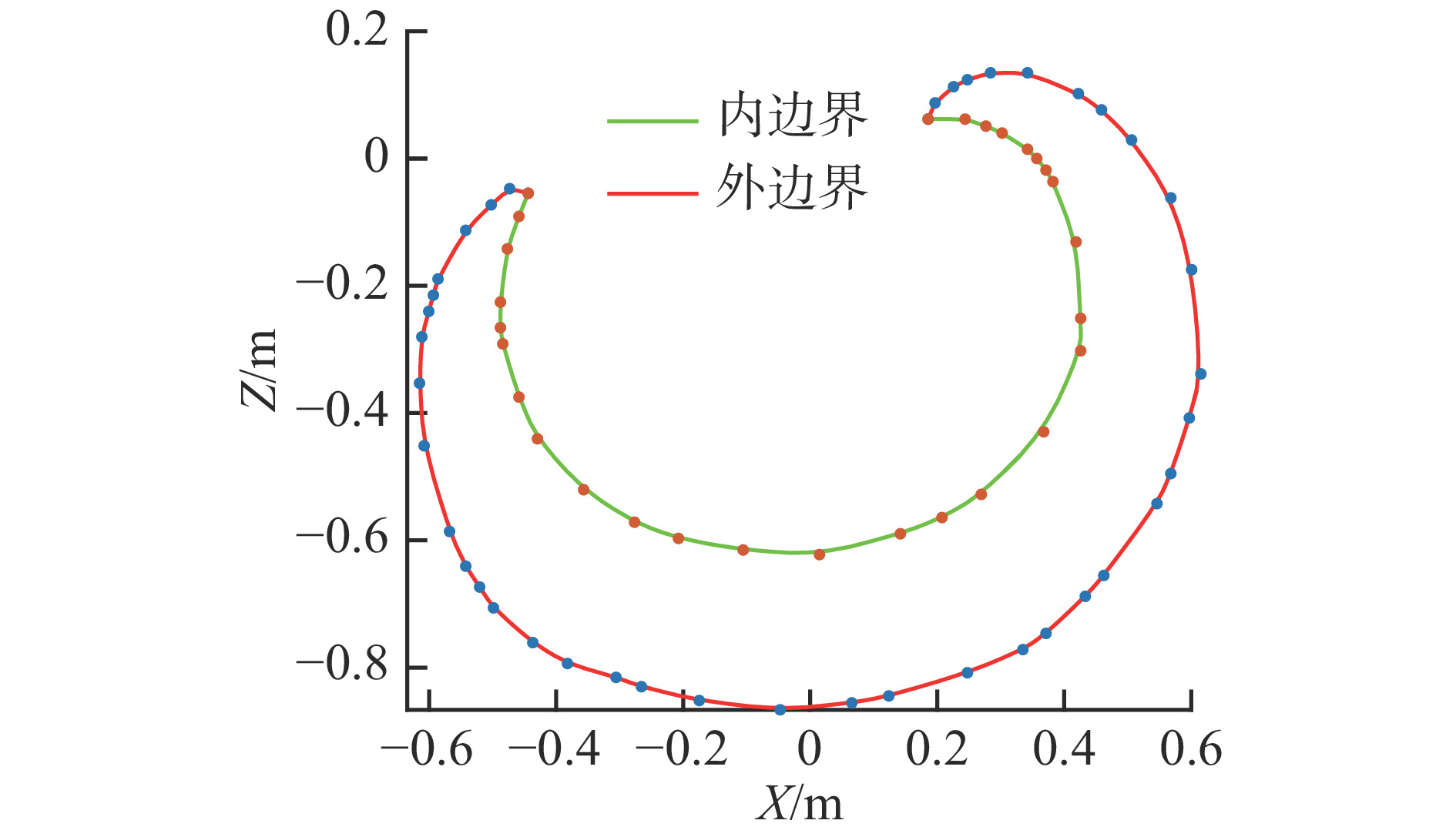
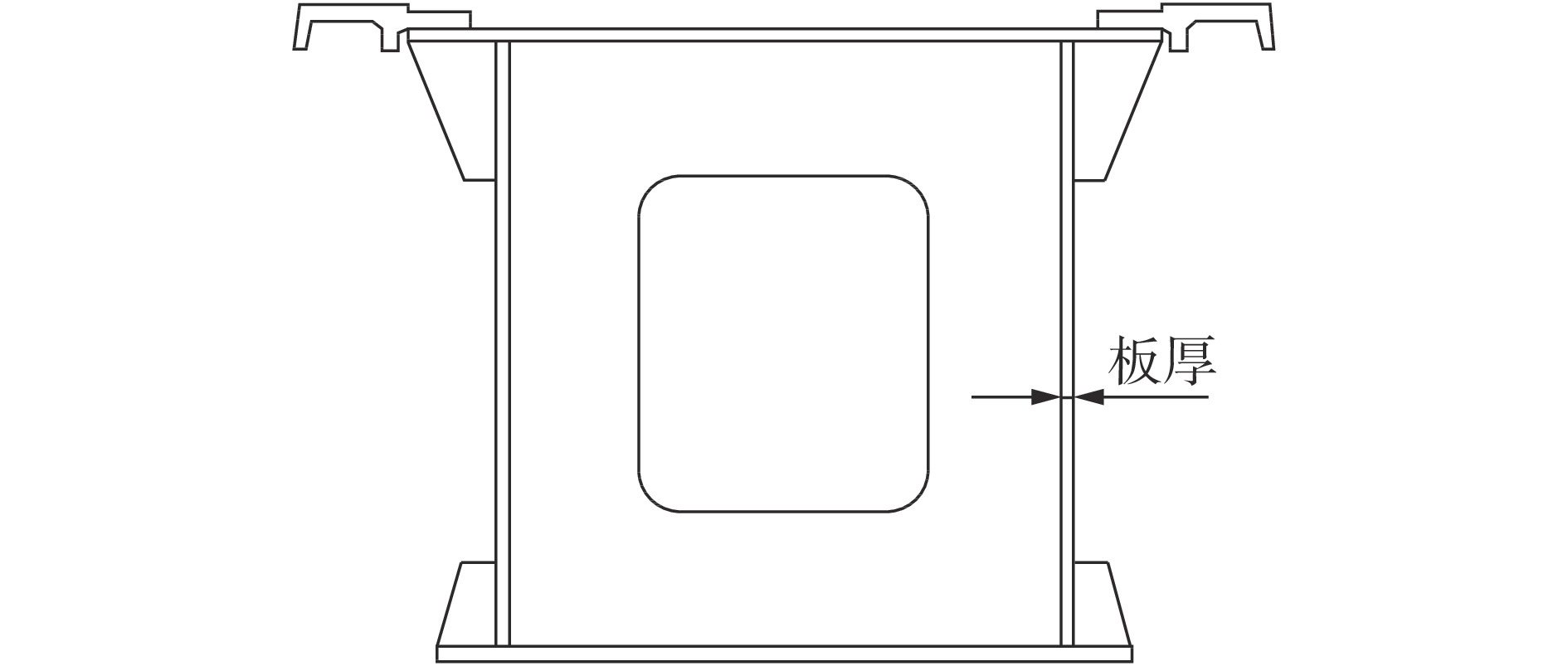
In this paper, we put forward a method of structural design of the pneumatic trunk-type continuum robot, which structure is designed into multiple segments in series after analyzing the kinematic performance of the trunk and the continuum mechanism. Through analyzing its performance indexes including workspace, dexterity and maneuverability, we adopt three segments in series to design the robot. The optimal spacer's number and the radial dimension of every segment are determined by Adams simulation analysis. Results of the robot kinematic performance test show that the bionic robot designed in this paper achieves the design targets, that is flexible movement and grabbing target objects. This research reveals the influence of segment number and other design parameters on the workspace and kinematics measure of the continuum robot,
In this paper, we put forward a method of structural design of the pneumatic trunk-type continuum robot, which structure is designed into multiple segments in series after analyzing the kinematic performance of the trunk and the continuum mechanism. Through analyzing its performance indexes including workspace, dexterity and maneuverability, we adopt three segments in series to design the robot. The optimal spacer's number and the radial dimension of every segment are determined by Adams simulation analysis. Results of the robot kinematic performance test show that the bionic robot designed in this paper achieves the design targets, that is flexible movement and grabbing target objects. This research reveals the influence of segment number and other design parameters on the workspace and kinematics measure of the continuum robot,











2022, 41(4): 500-504.
doi: 10.13433/j.cnki.1003-8728.20200377
Abstract:
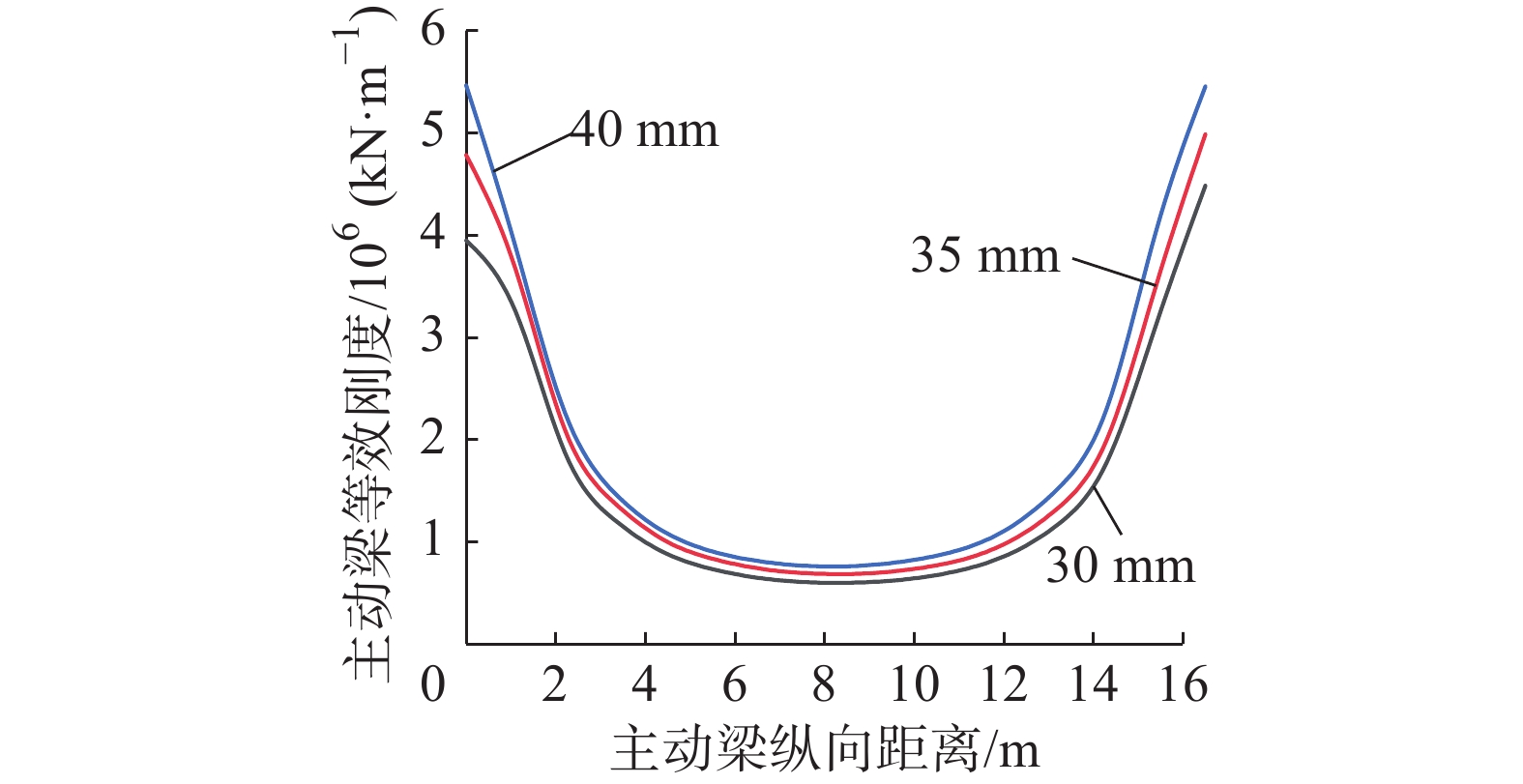
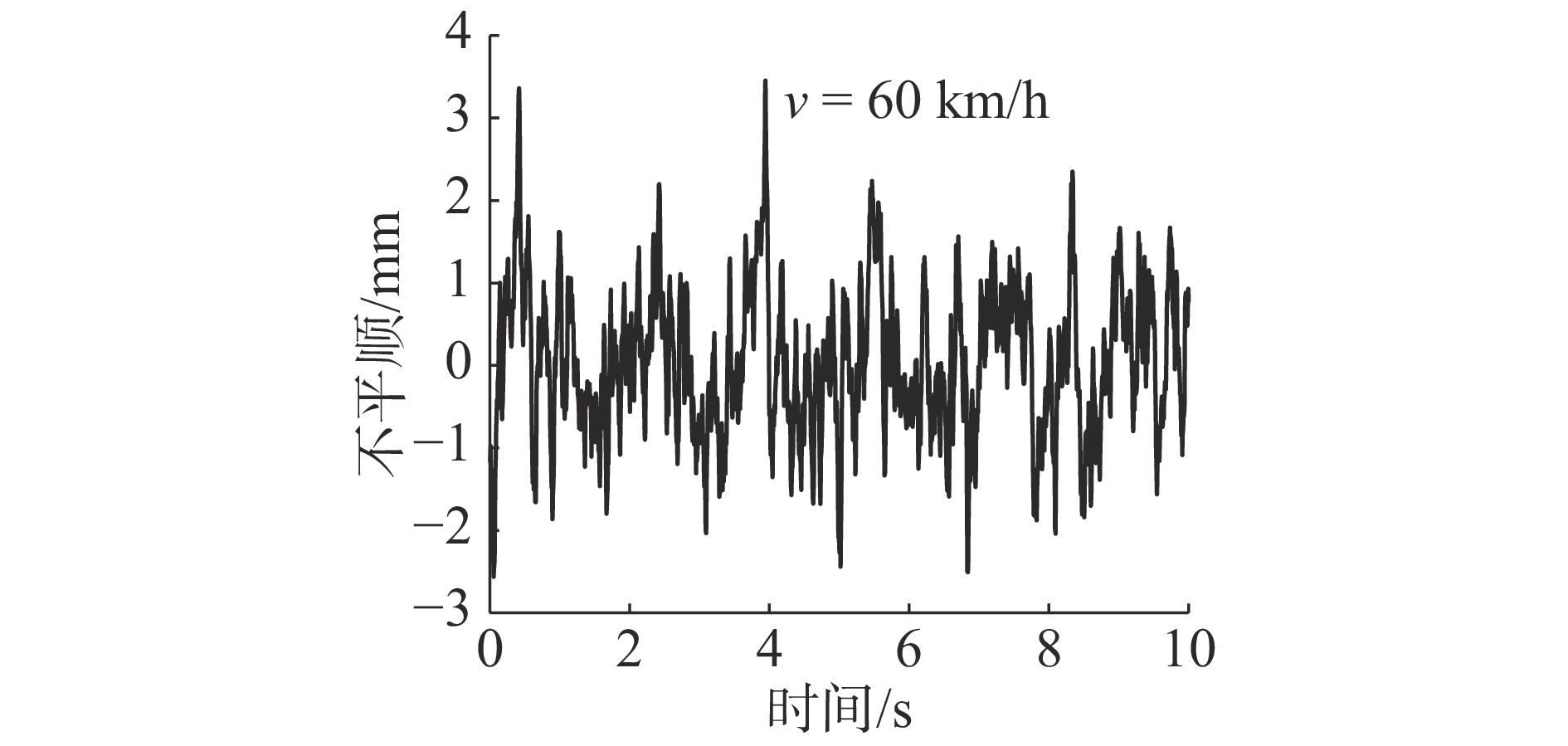
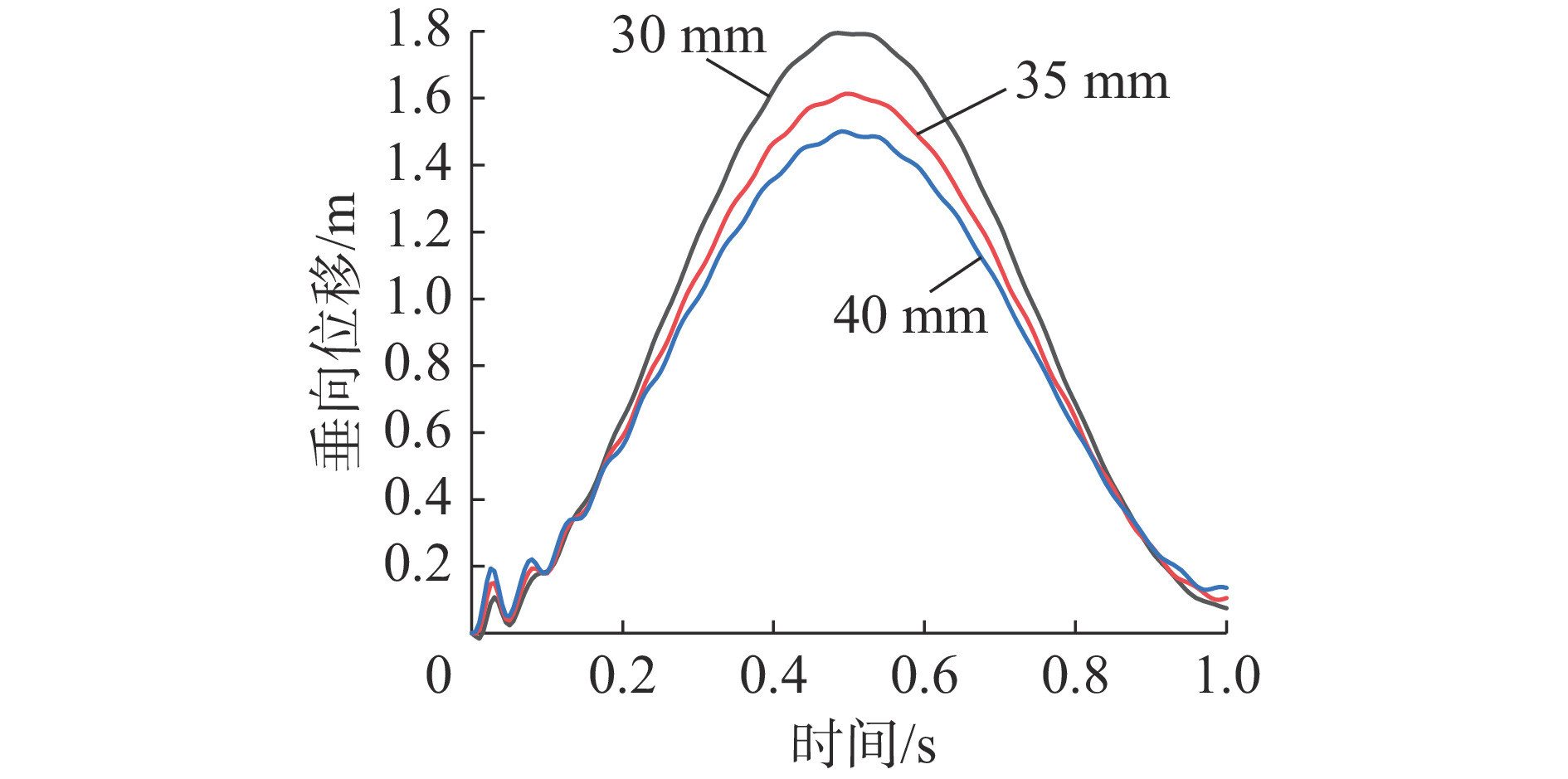
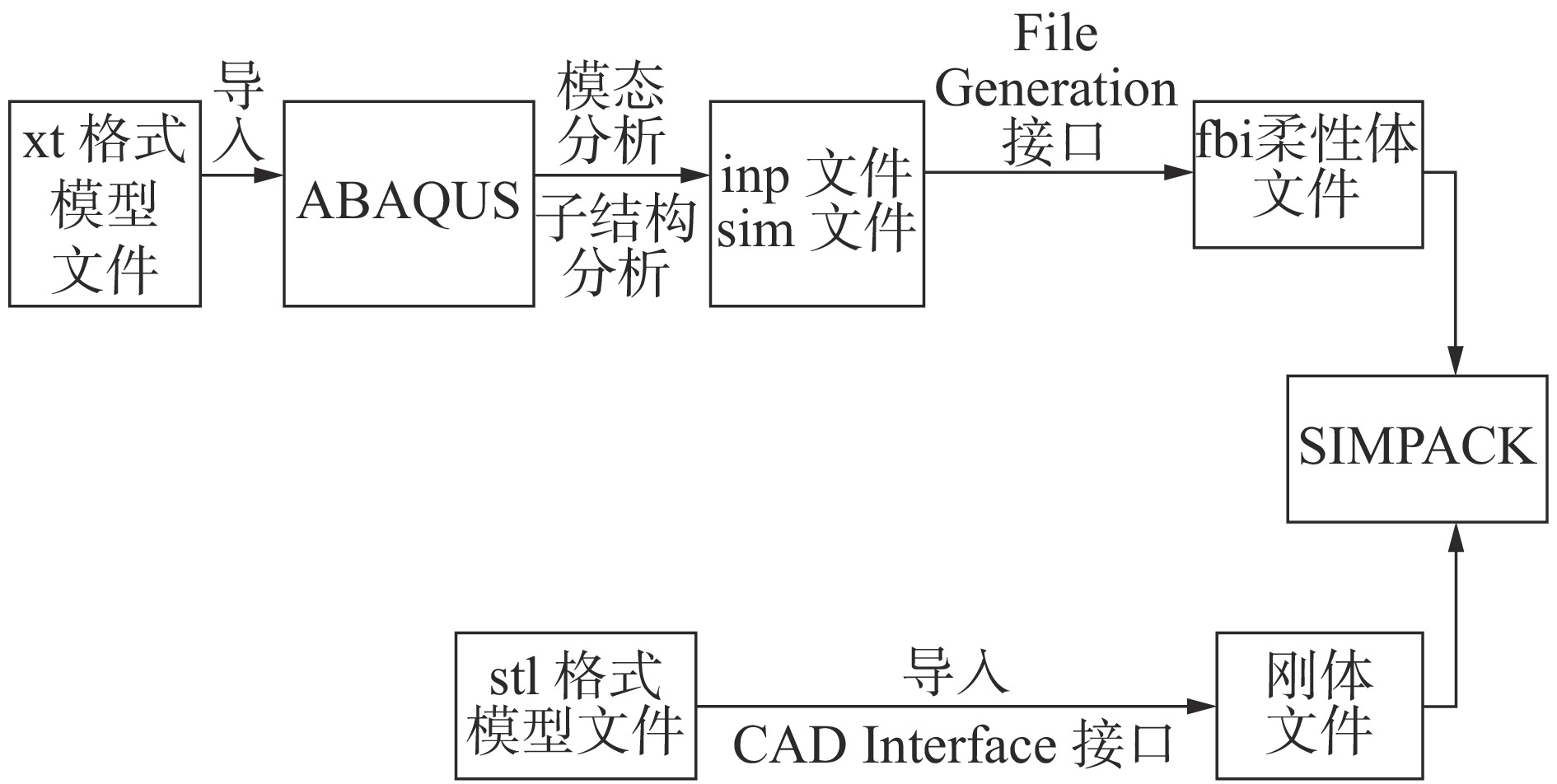
In this paper, the coupled vibration analysis model of medium-low speed maglev train and active turnout girder is established, and the vibration of the girder as the research target when the maglev train passes the turnout girder. The finite element software is used to carry on the static analysis of the active turnout girder, and the equivalent stiffness curve of the active turnout girder is obtained. Rigid body dynamics model of the maglev train and turnout girder is established with Lagrange dynamic equation. Based on the dynamic simulation software, dynamic responses of the magnetic levitation train and turnout girder were simulated, and the vertical displacement curve of the turnout girder was obtained when the train passed the rigid turnout girder. Then the rigid-flexible coupling dynamics of the active turnout girder was simulated by ABAQUS and SIMPACK. The results show that the stiffness and weight of the girder have a great influence on the deformation of the girder. The vertical displacement of the flexible active turnout girder is larger than that of the rigid active turnout girder, and the flexible active turnout girder is closer to the actual situation.
In this paper, the coupled vibration analysis model of medium-low speed maglev train and active turnout girder is established, and the vibration of the girder as the research target when the maglev train passes the turnout girder. The finite element software is used to carry on the static analysis of the active turnout girder, and the equivalent stiffness curve of the active turnout girder is obtained. Rigid body dynamics model of the maglev train and turnout girder is established with Lagrange dynamic equation. Based on the dynamic simulation software, dynamic responses of the magnetic levitation train and turnout girder were simulated, and the vertical displacement curve of the turnout girder was obtained when the train passed the rigid turnout girder. Then the rigid-flexible coupling dynamics of the active turnout girder was simulated by ABAQUS and SIMPACK. The results show that the stiffness and weight of the girder have a great influence on the deformation of the girder. The vertical displacement of the flexible active turnout girder is larger than that of the rigid active turnout girder, and the flexible active turnout girder is closer to the actual situation.




2022, 41(4): 505-510.
doi: 10.13433/j.cnki.1003-8728.20200376
Abstract:
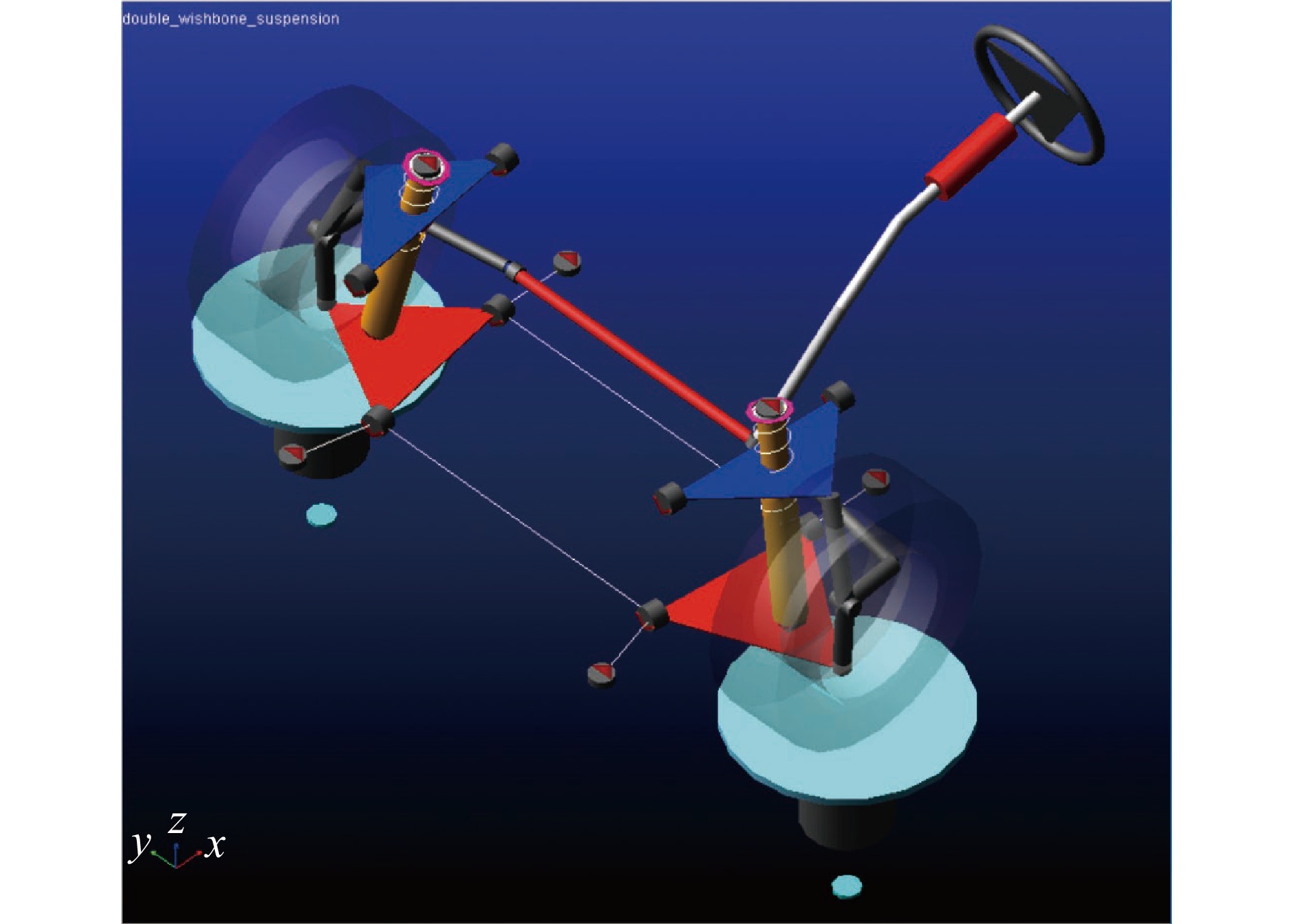
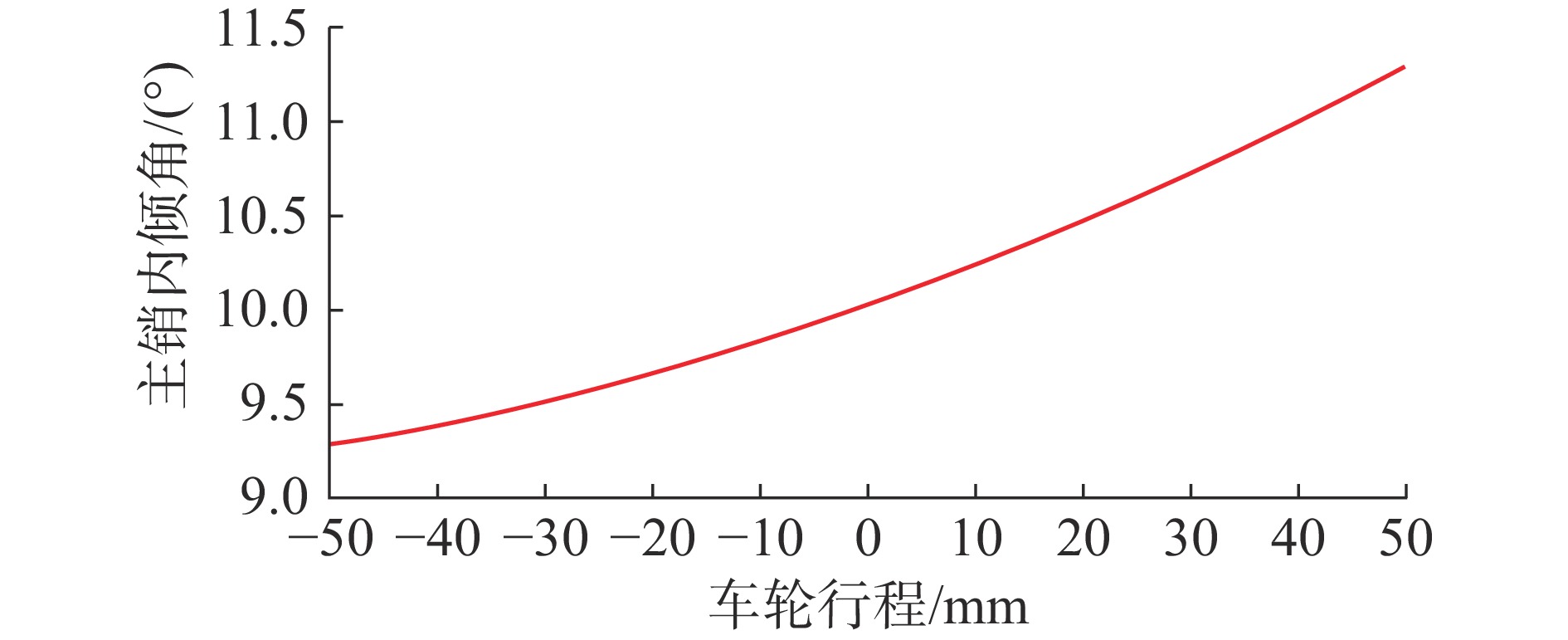
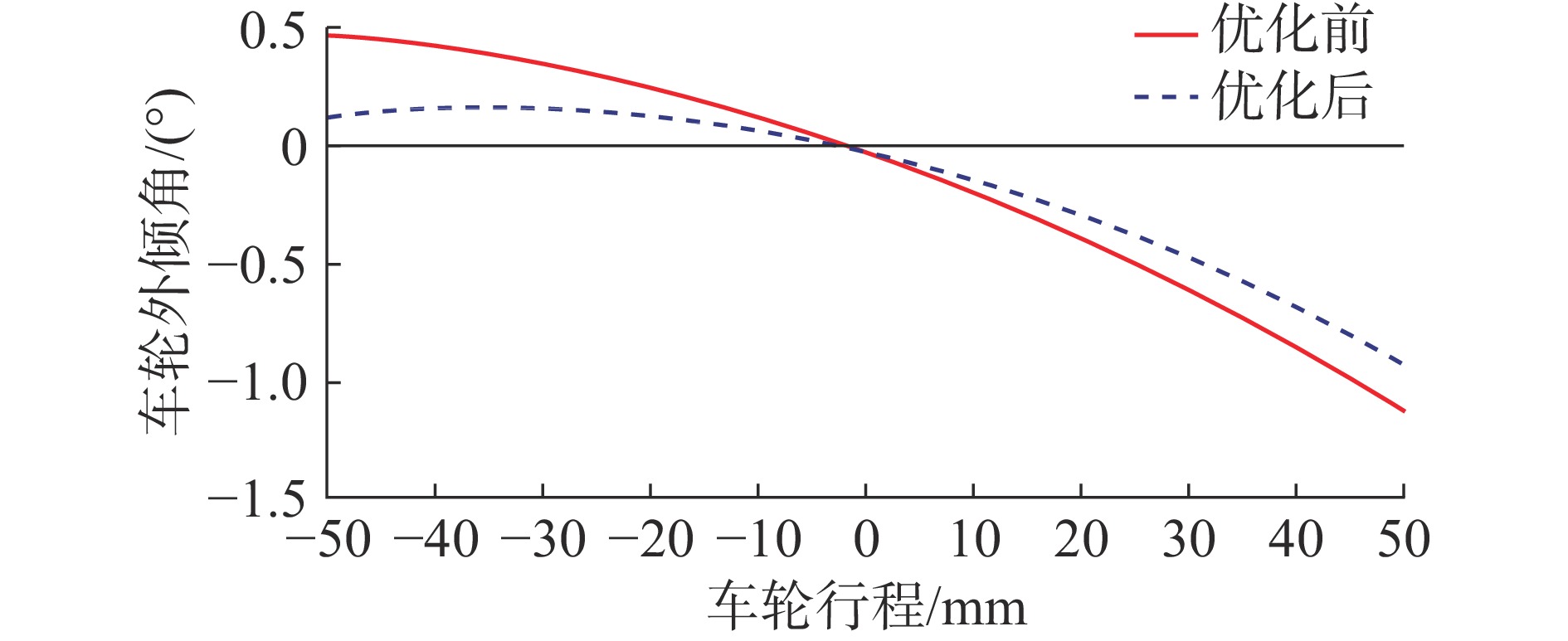
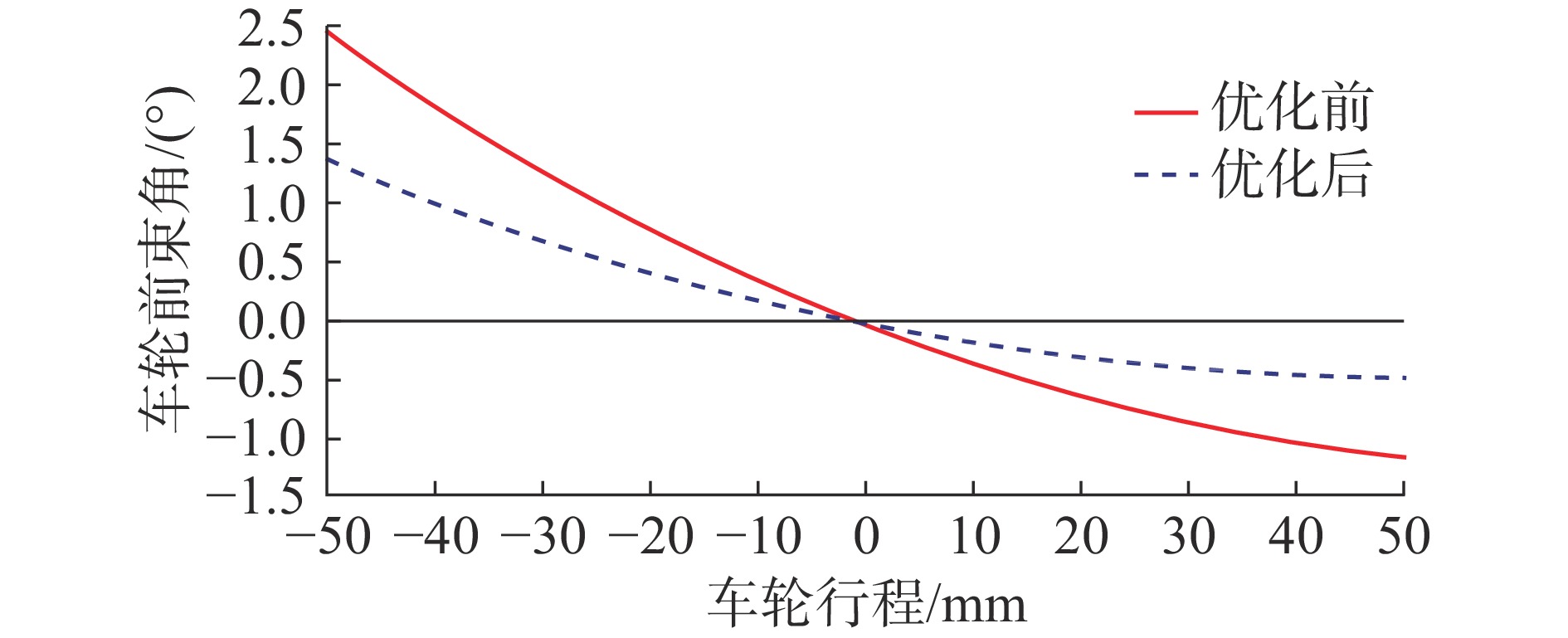
Taking a SUV double-wishbone suspension as a research object, the dynamic model of the suspension system was established in Adams car, and simulation experiments were performed. According to the simulation results, the variation rules of the positioning parameters with the wheel travel are analyzed. Aiming at the problems existing in the suspension such as camber and toe angle did not meet the design requirements, the relevant hard points were selected, and the Adams/Insight module is used for the multi-objective optimization design of the hard point positions. The D-optimal algorithm based on response surface model is used to optimize the selected parameters. The comparison between before and after optimization shows that the double-wishbone suspension after adjusting the coordinates of some hard points has better performance, which improves the straight-line driving stability and understeering characteristics of the entire vehicle. The kinematics performance of the optimized suspension meets the requirements, and the results of this optimization design are valid.
Taking a SUV double-wishbone suspension as a research object, the dynamic model of the suspension system was established in Adams car, and simulation experiments were performed. According to the simulation results, the variation rules of the positioning parameters with the wheel travel are analyzed. Aiming at the problems existing in the suspension such as camber and toe angle did not meet the design requirements, the relevant hard points were selected, and the Adams/Insight module is used for the multi-objective optimization design of the hard point positions. The D-optimal algorithm based on response surface model is used to optimize the selected parameters. The comparison between before and after optimization shows that the double-wishbone suspension after adjusting the coordinates of some hard points has better performance, which improves the straight-line driving stability and understeering characteristics of the entire vehicle. The kinematics performance of the optimized suspension meets the requirements, and the results of this optimization design are valid.





2022, 41(4): 511-516.
doi: 10.13433/j.cnki.1003-8728.20200464
Abstract:
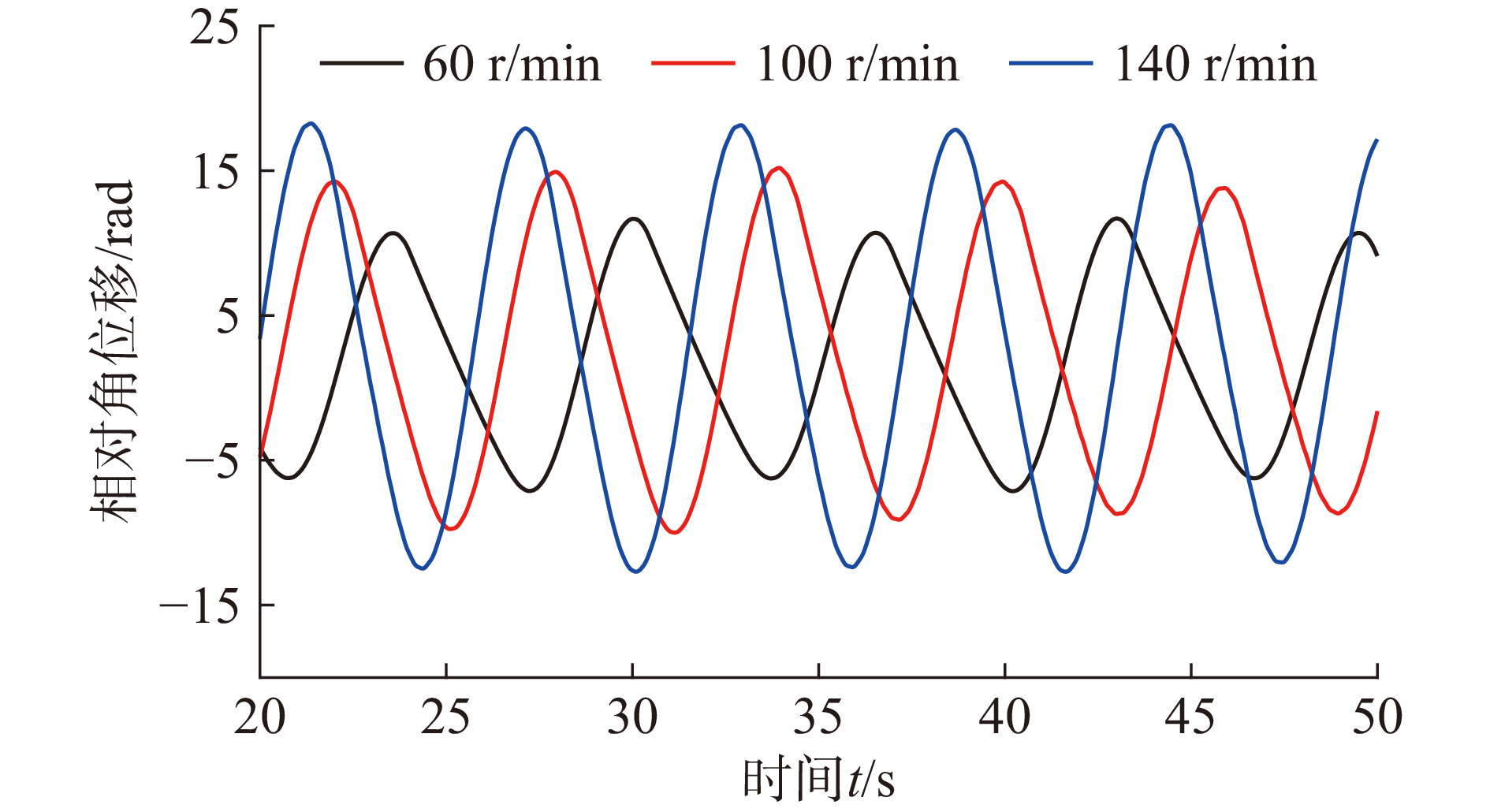
Petroleum drilling operations are usually accompanied by severe drill string vibration, which makes drilling operations difficult and inefficient. Stick-slip vibration is considered to be one of the main causes of drill string failure and low drilling efficiency. This paper establishes a mathematical model of drill string longitudinal-torsional coupled vibration, derives related dynamic equations and analyzes four forms of rock-bit interaction. The established dynamic equation is solved using Runge-Kutta method with adaptive step size. Combined with the analysis of the calculation examples, the angular velocity and relative angular displacement changes of the drill bit under different parameters are obtained. The results show that the stick-slip vibration of the drill string system due to the coupling of longitudinal and torsion is weakened under the conditions of high speed and low weight-on-bit drilling.
Petroleum drilling operations are usually accompanied by severe drill string vibration, which makes drilling operations difficult and inefficient. Stick-slip vibration is considered to be one of the main causes of drill string failure and low drilling efficiency. This paper establishes a mathematical model of drill string longitudinal-torsional coupled vibration, derives related dynamic equations and analyzes four forms of rock-bit interaction. The established dynamic equation is solved using Runge-Kutta method with adaptive step size. Combined with the analysis of the calculation examples, the angular velocity and relative angular displacement changes of the drill bit under different parameters are obtained. The results show that the stick-slip vibration of the drill string system due to the coupling of longitudinal and torsion is weakened under the conditions of high speed and low weight-on-bit drilling.







2022, 41(4): 517-522.
doi: 10.13433/j.cnki.1003-8728.20200403
Abstract:
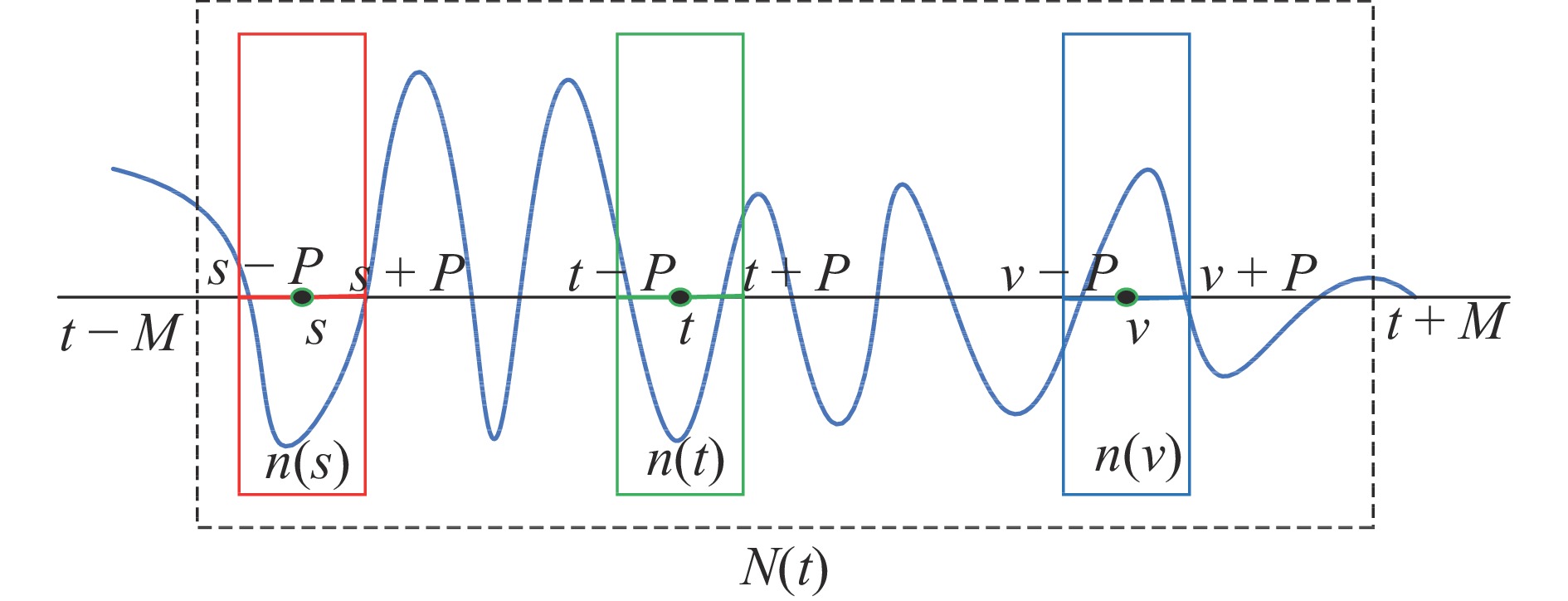
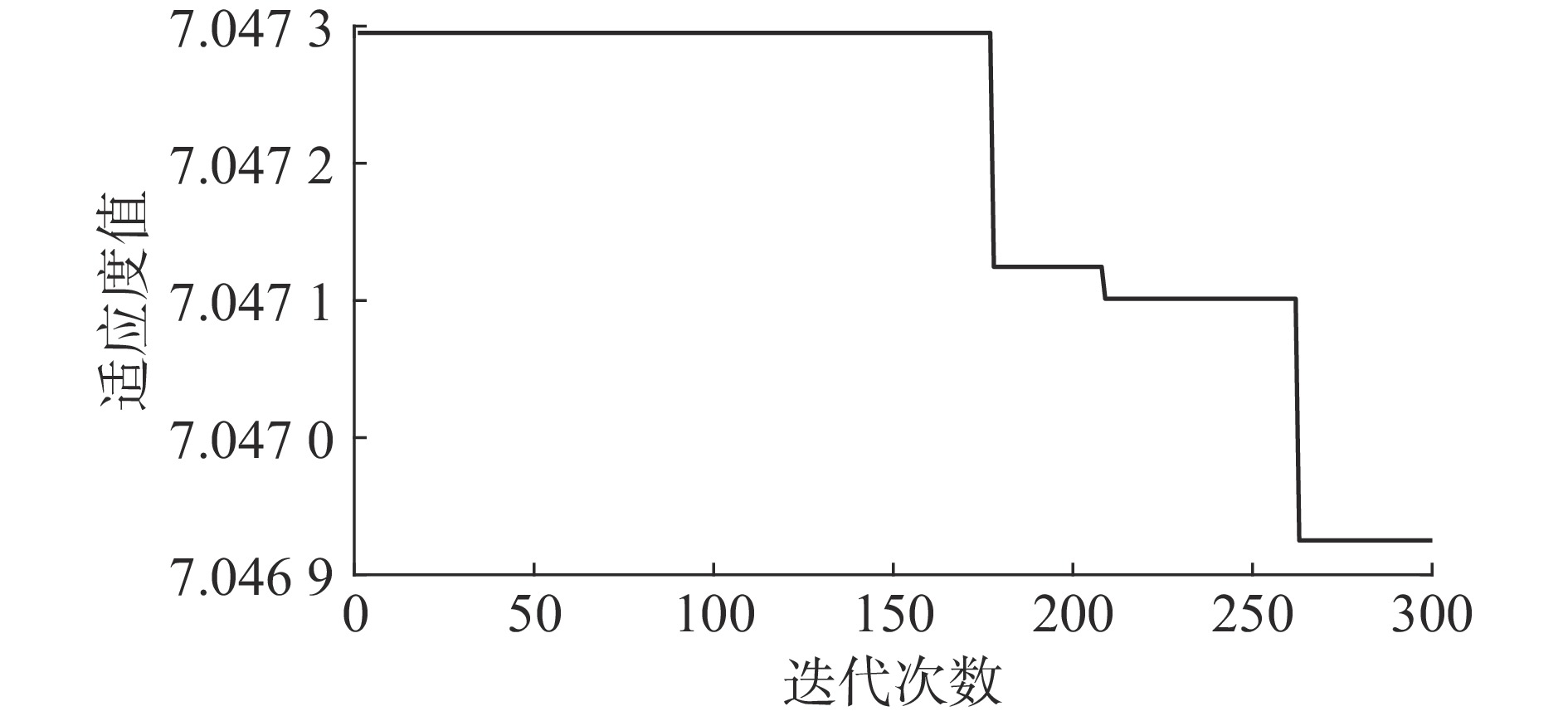
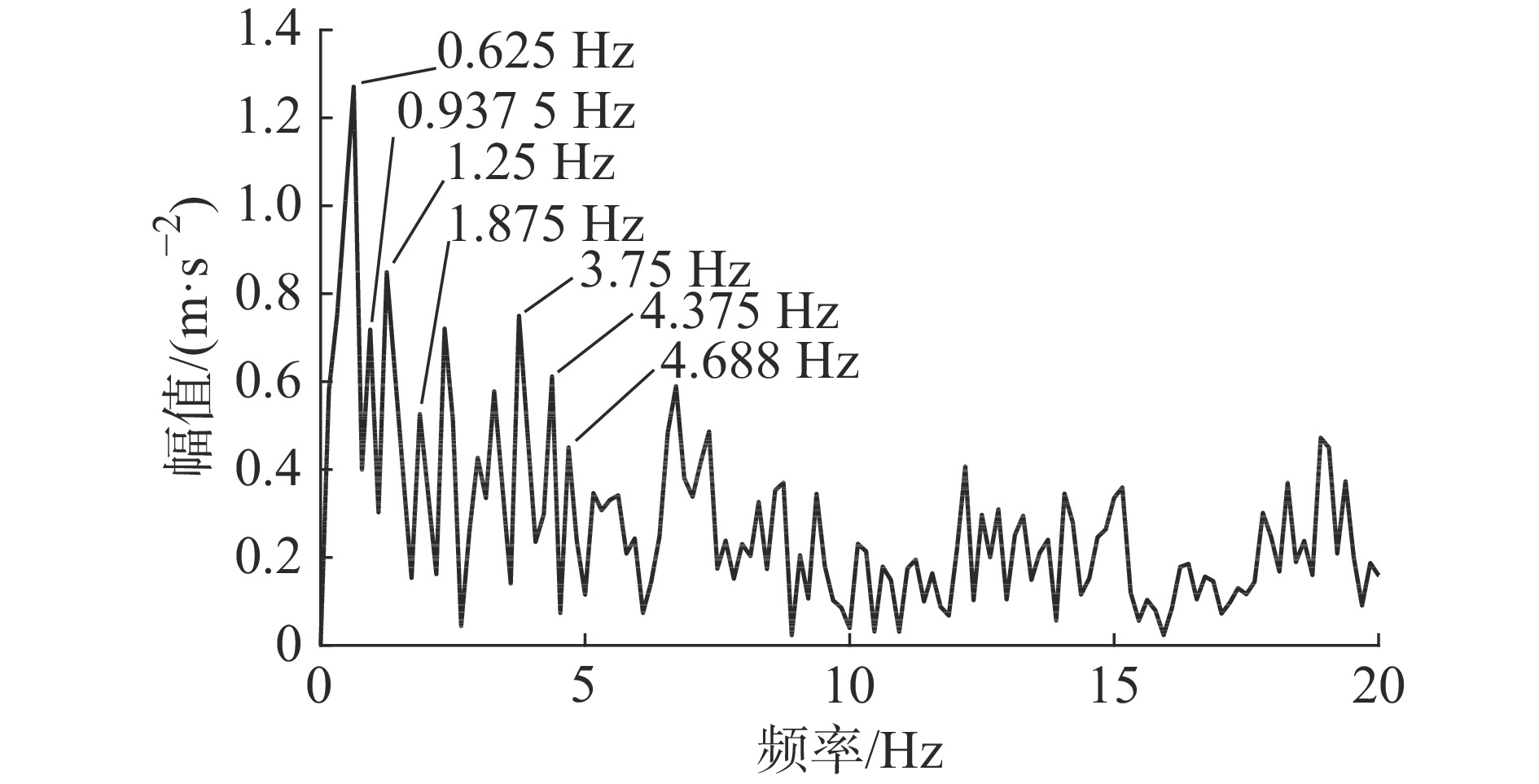
Aiming at the problem that the check valve is interfered by a large amount of background noise, which makes it difficult to extract the fault characteristics, a particle swarm optimization (PSO) non-local mean (NLM) weighted envelope analysis method for check valve fault diagnosis is proposed in this paper. First, the particle swarm optimization algorithm uses the minimum envelope entropy of the signal after NLM filtering as the objective function selection parameter; secondly, the averaging characteristic of the NLM algorithm will average some impact features during the filtering process, and directly use the weight distribution curve of the signal sample points obtained by the NLM weighting operation is used as the processing signal to enhance the fault impact from the perspective of weight; finally, the weight distribution curve is subjected to Hilbert envelope analysis to obtain the diagnosis result. Engineering data verification shows that the proposed method can more accurately extract the fault characteristic frequency of the check valve.
Aiming at the problem that the check valve is interfered by a large amount of background noise, which makes it difficult to extract the fault characteristics, a particle swarm optimization (PSO) non-local mean (NLM) weighted envelope analysis method for check valve fault diagnosis is proposed in this paper. First, the particle swarm optimization algorithm uses the minimum envelope entropy of the signal after NLM filtering as the objective function selection parameter; secondly, the averaging characteristic of the NLM algorithm will average some impact features during the filtering process, and directly use the weight distribution curve of the signal sample points obtained by the NLM weighting operation is used as the processing signal to enhance the fault impact from the perspective of weight; finally, the weight distribution curve is subjected to Hilbert envelope analysis to obtain the diagnosis result. Engineering data verification shows that the proposed method can more accurately extract the fault characteristic frequency of the check valve.








2022, 41(4): 523-529.
doi: 10.13433/j.cnki.1003-8728.20200384
Abstract:
To improve the efficiency of the mechanical structural design, it is necessary to identify the topological symmetry of a kinematic chain to reduce the options of the configuration of the new mechanical device. The Hamming matrix is derived from the link adjacency matrix. The cubic matrix of the adjacency matrix and the square matrix of the Hamming matrix are calculated. The square matrix and the cubic matrix are computed to obtain the product matrix. The elements in each row of the product matrix are arranged in descending order to obtain their row sequences. Finally, topological symmetry recognition code (TSRC) of the kinematic chain is obtained by summing the product of the elements in the above sequences with the topological factor. If the symmetry recognition codes of two vertices in a topological graph are the same, they are symmetric; otherwise they are not. The effectiveness of this method is proved by some examples of a single joint kinematic chain, multi-joint kinematic chain and planetary gear train. The results show that this method is simple, efficient and easy for computer programming.
To improve the efficiency of the mechanical structural design, it is necessary to identify the topological symmetry of a kinematic chain to reduce the options of the configuration of the new mechanical device. The Hamming matrix is derived from the link adjacency matrix. The cubic matrix of the adjacency matrix and the square matrix of the Hamming matrix are calculated. The square matrix and the cubic matrix are computed to obtain the product matrix. The elements in each row of the product matrix are arranged in descending order to obtain their row sequences. Finally, topological symmetry recognition code (TSRC) of the kinematic chain is obtained by summing the product of the elements in the above sequences with the topological factor. If the symmetry recognition codes of two vertices in a topological graph are the same, they are symmetric; otherwise they are not. The effectiveness of this method is proved by some examples of a single joint kinematic chain, multi-joint kinematic chain and planetary gear train. The results show that this method is simple, efficient and easy for computer programming.








2022, 41(4): 530-536.
doi: 10.13433/j.cnki.1003-8728.20200406
Abstract:
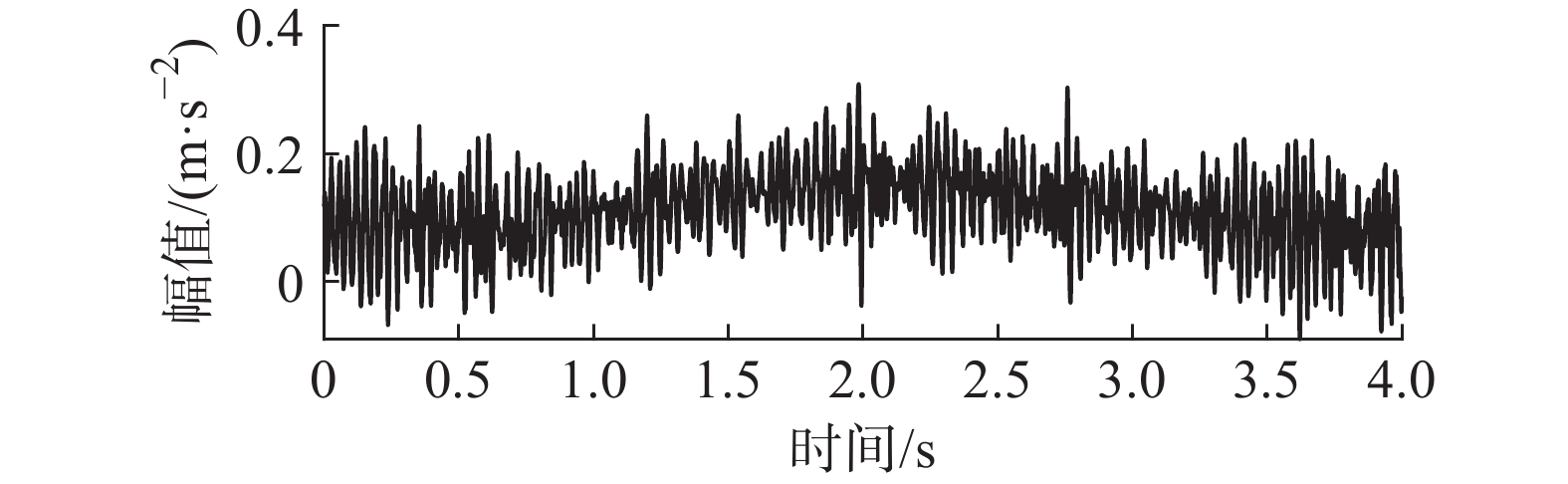
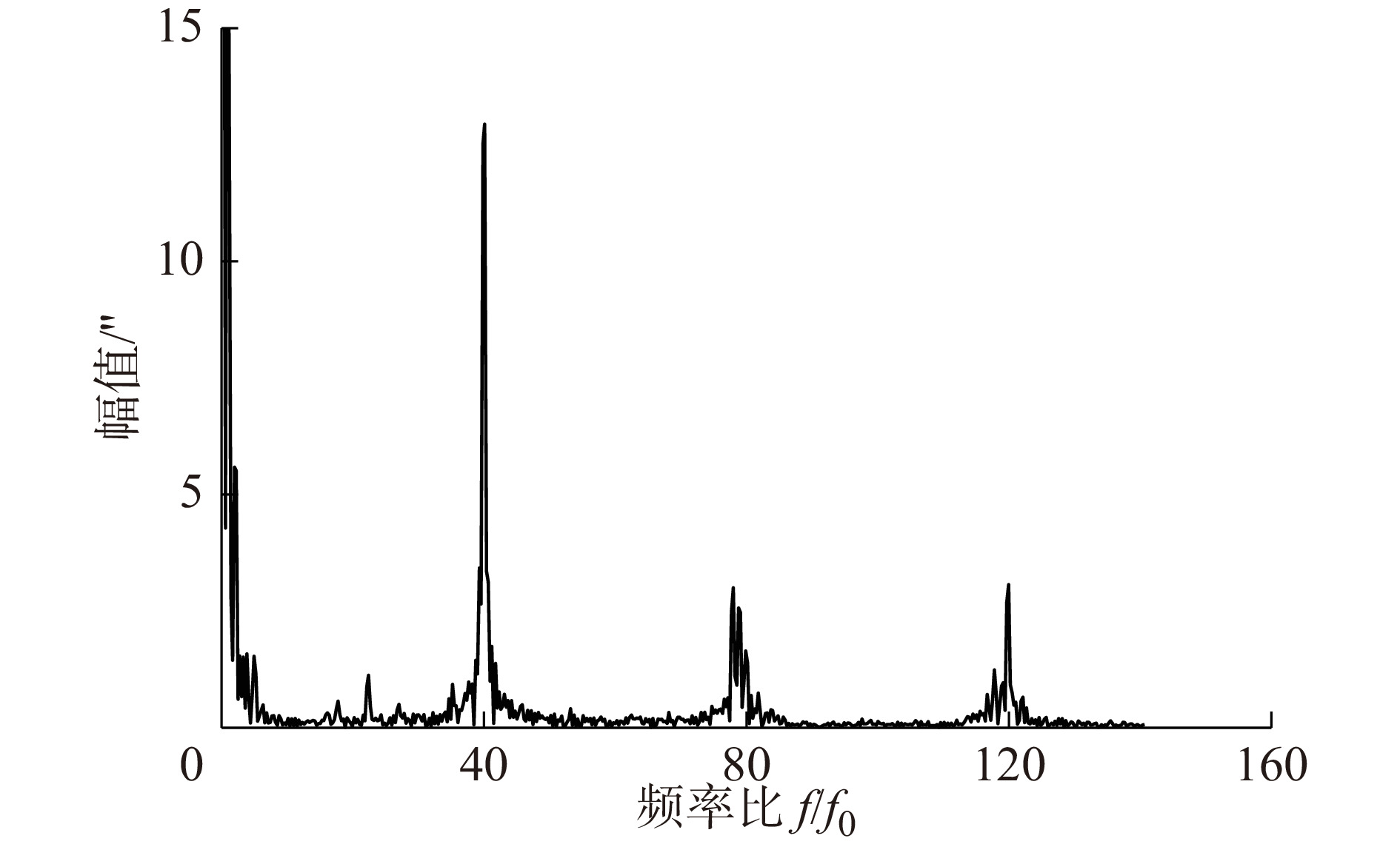
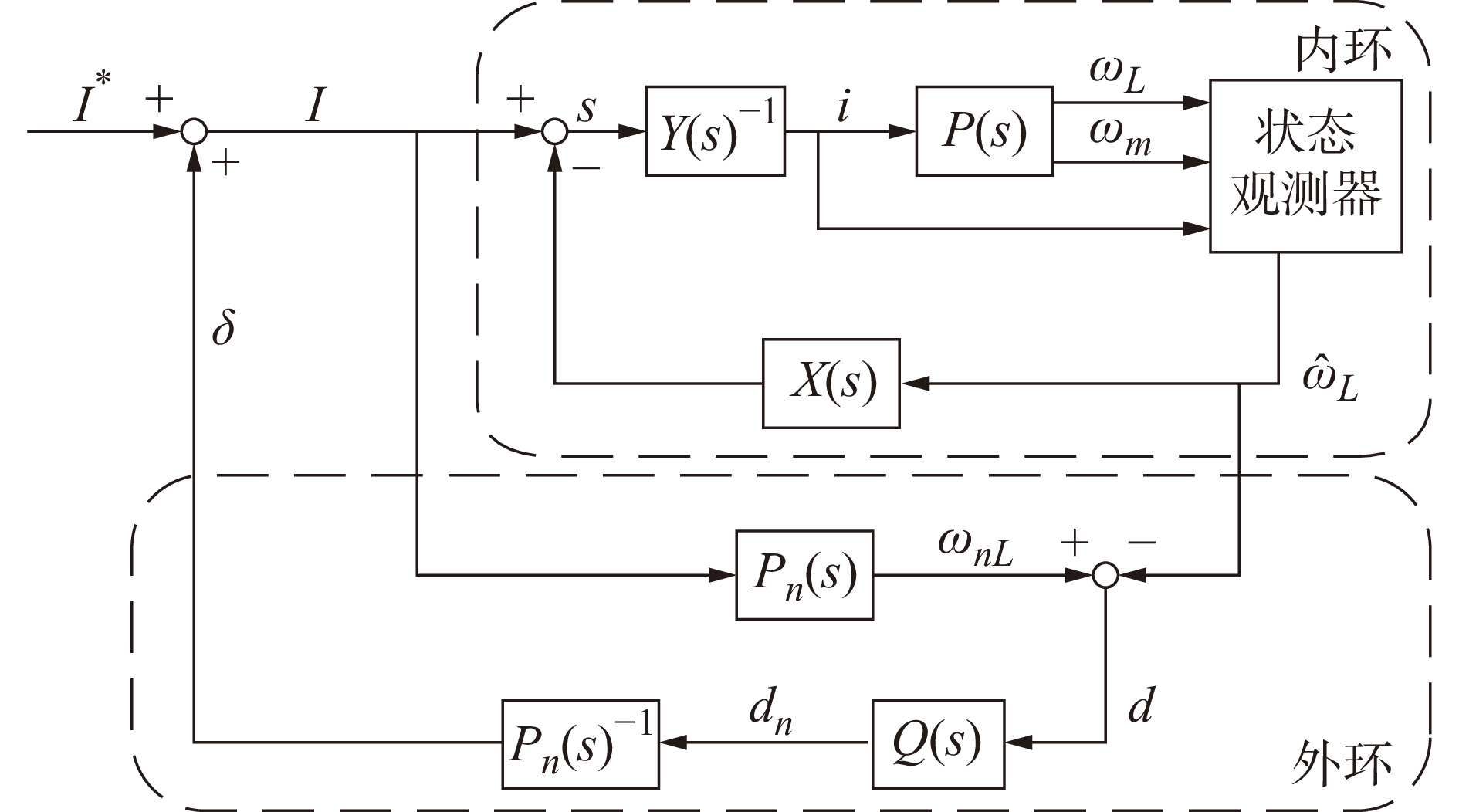
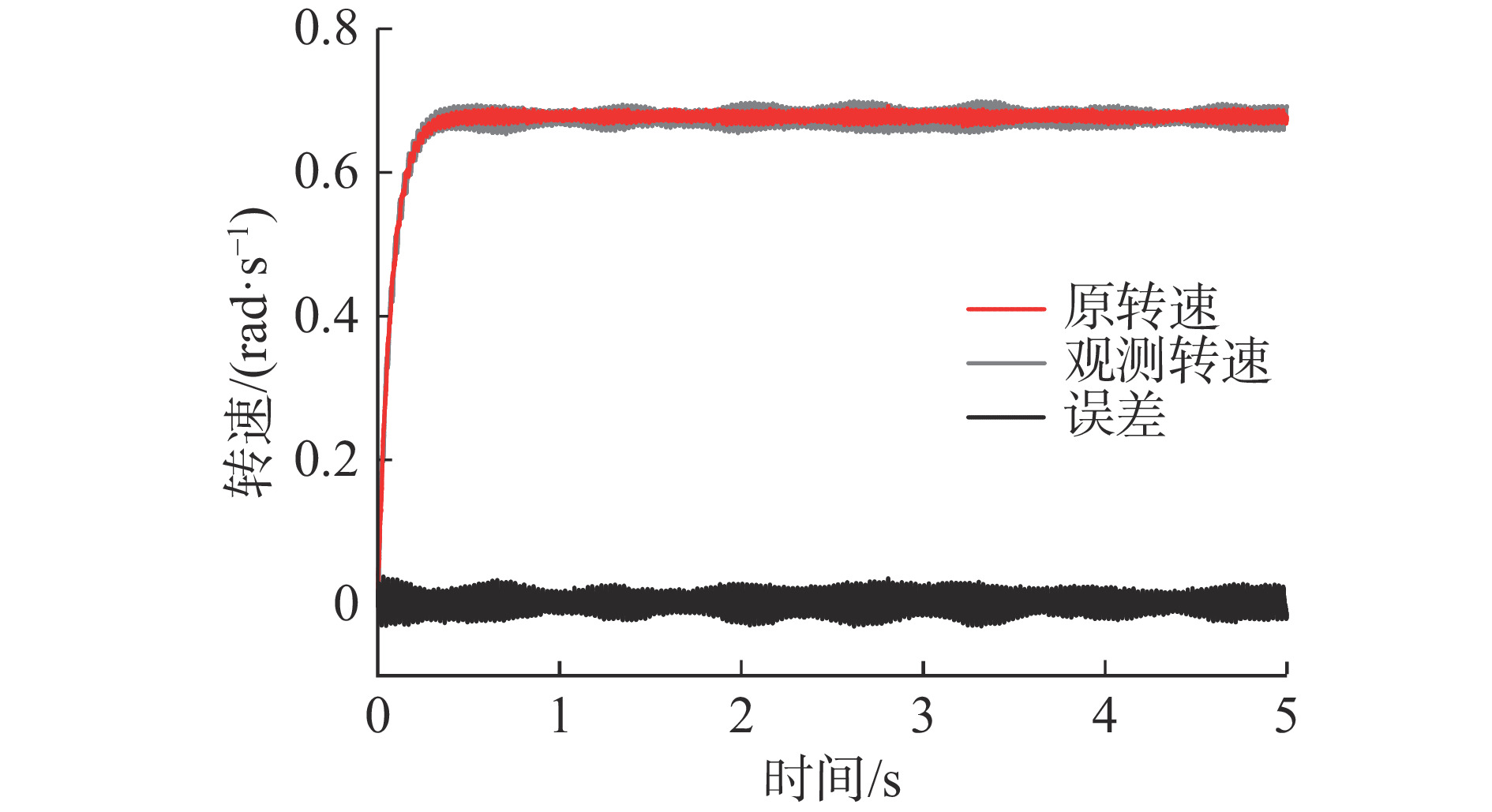
In view of the vibration phenomenon of the actuator in the working process of the industrial robot, the modern control theories were employed to suppress the vibration of the actuator. Based on the analysis of the speed fluctuation mechanism on the load side of the robot, the mathematical model of RV deceleration dynamic angular transmission error and meshing friction excitation were established. The electromechanical coupling system composed of servo motor, RV reducer and load considering the influence of dynamic angular transmission error and friction factors was taken as the control object, and the double loop control strategy of inner loop robust control and outer loop disturbance observer was used to suppress the speed fluctuation on the load side. The results showed that compared with PI control, the instructions could be responded more quickly and smoothly by robots during the start-up phase, and rotational speed fluctuation was significantly reduced during the steady-state working phase, with a drop of nearly 50%, while this method was employed.
In view of the vibration phenomenon of the actuator in the working process of the industrial robot, the modern control theories were employed to suppress the vibration of the actuator. Based on the analysis of the speed fluctuation mechanism on the load side of the robot, the mathematical model of RV deceleration dynamic angular transmission error and meshing friction excitation were established. The electromechanical coupling system composed of servo motor, RV reducer and load considering the influence of dynamic angular transmission error and friction factors was taken as the control object, and the double loop control strategy of inner loop robust control and outer loop disturbance observer was used to suppress the speed fluctuation on the load side. The results showed that compared with PI control, the instructions could be responded more quickly and smoothly by robots during the start-up phase, and rotational speed fluctuation was significantly reduced during the steady-state working phase, with a drop of nearly 50%, while this method was employed.









2022, 41(4): 537-544.
doi: 10.13433/j.cnki.1003-8728.20200364
Abstract:
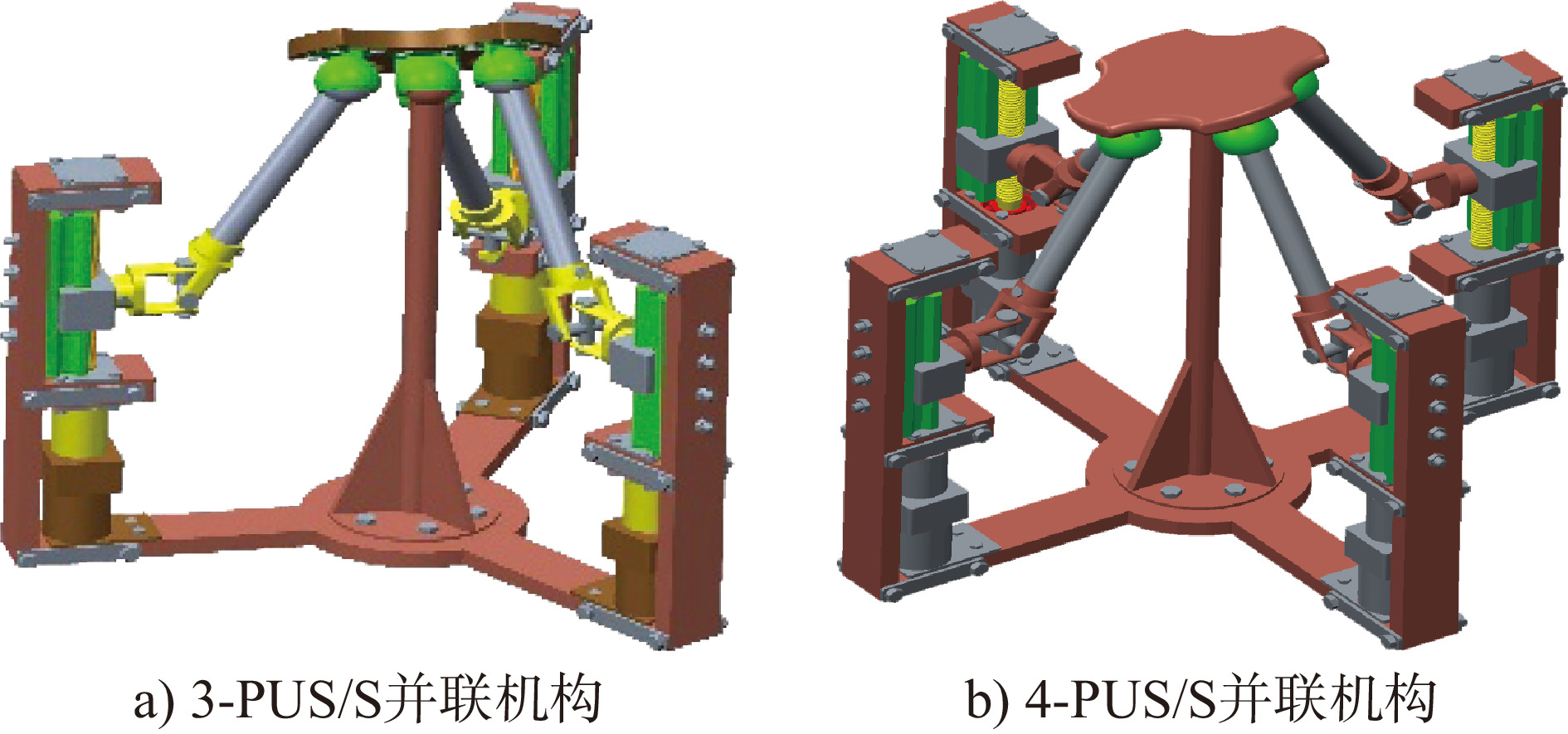
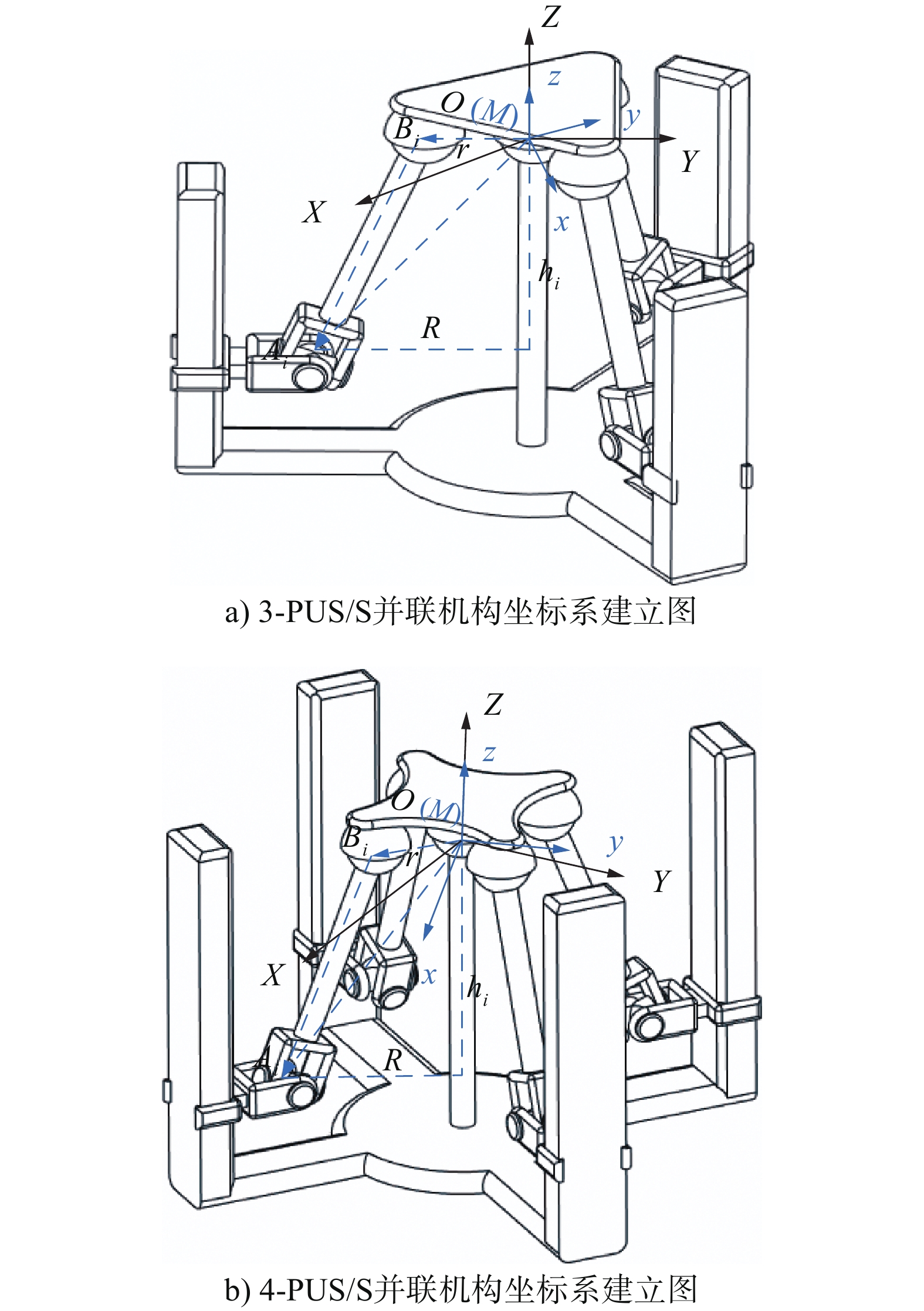
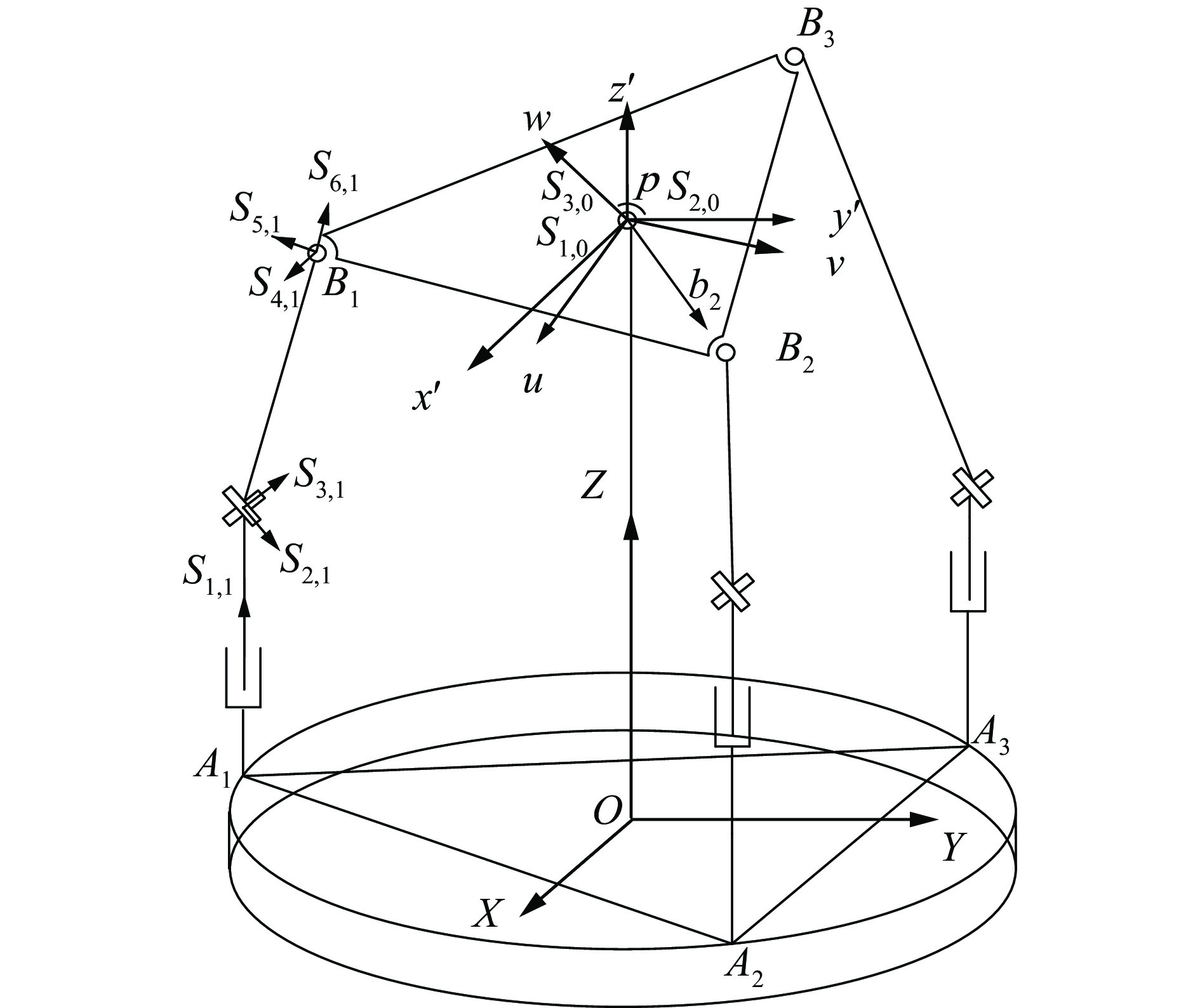
A type of 3-PUS/S parallel mechanism was proposed, and a redundant actuation chain was added to the 3-PUS/S parallel mechanism to form a 4-PUS/S parallel mechanism. The method of comparative analysis to explore the influence of the redundant actuation chain on the performance of the original mechanism under the same conditionsis used. The specific research contents include that the position and attitude equations of the two parallel mechanisms to establish with the space vector triangle method, and the kinematics inverse solution model. The workspace of the two parallel mechanisms under the same conditions were drawn and compared. The constraint Jacobian matrix and the actuation Jacobian matrix of the two parallel mechanisms were obtained with the screw theory, and the complete Jacobian matrix was further constructed. The static stiffness of two parallel mechanisms was studied, and the distribution map of the maximum eigenvalue of the stiffness matrix of the two parallel mechanisms was drawn and compared. The dynamic models of two parallel mechanisms were established with Langrange equation, and the actuation force output curves of the two parallel mechanisms were plotted and compared after the design parameters of the mechanism and the trajectory planning function of the moving platform were given. Finally, it was concluded thatthe introduction of redundant actuation chaincould slightly reduce the workspace range of the moving platform of the original mechanism, improvethe distribution of stiffness characteristics, improve the stiffness, working accuracy and improve the actuation performance.
A type of 3-PUS/S parallel mechanism was proposed, and a redundant actuation chain was added to the 3-PUS/S parallel mechanism to form a 4-PUS/S parallel mechanism. The method of comparative analysis to explore the influence of the redundant actuation chain on the performance of the original mechanism under the same conditionsis used. The specific research contents include that the position and attitude equations of the two parallel mechanisms to establish with the space vector triangle method, and the kinematics inverse solution model. The workspace of the two parallel mechanisms under the same conditions were drawn and compared. The constraint Jacobian matrix and the actuation Jacobian matrix of the two parallel mechanisms were obtained with the screw theory, and the complete Jacobian matrix was further constructed. The static stiffness of two parallel mechanisms was studied, and the distribution map of the maximum eigenvalue of the stiffness matrix of the two parallel mechanisms was drawn and compared. The dynamic models of two parallel mechanisms were established with Langrange equation, and the actuation force output curves of the two parallel mechanisms were plotted and compared after the design parameters of the mechanism and the trajectory planning function of the moving platform were given. Finally, it was concluded thatthe introduction of redundant actuation chaincould slightly reduce the workspace range of the moving platform of the original mechanism, improvethe distribution of stiffness characteristics, improve the stiffness, working accuracy and improve the actuation performance.





2022, 41(4): 545-551.
doi: 10.13433/j.cnki.1003-8728.20200393
Abstract:
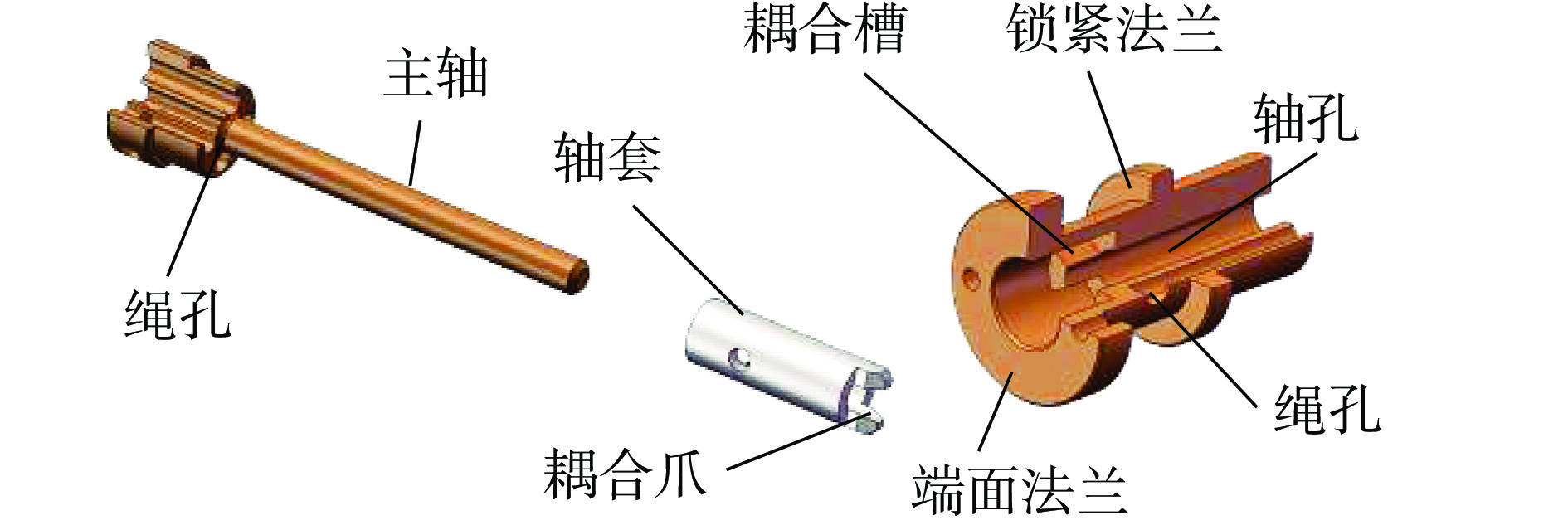
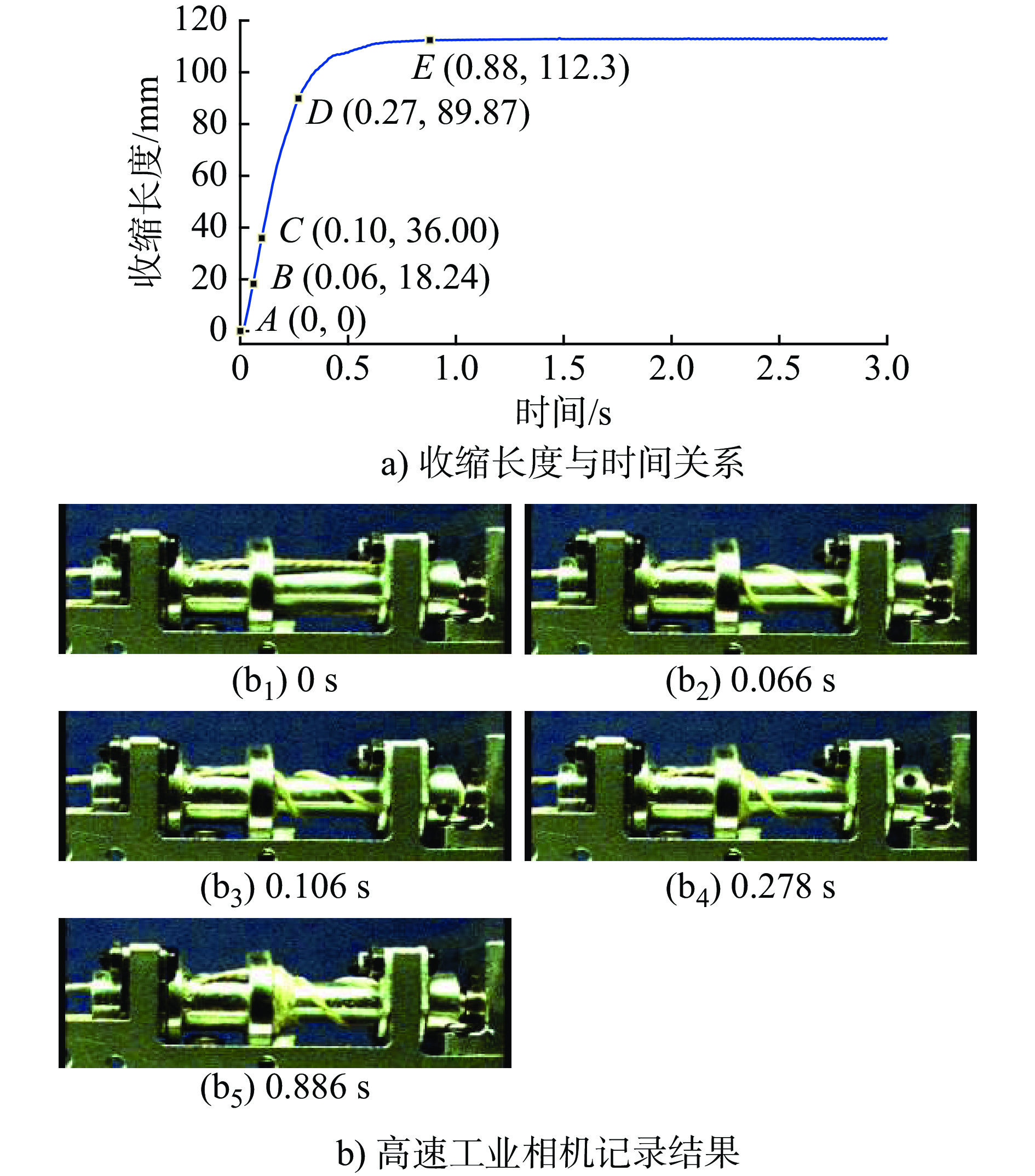
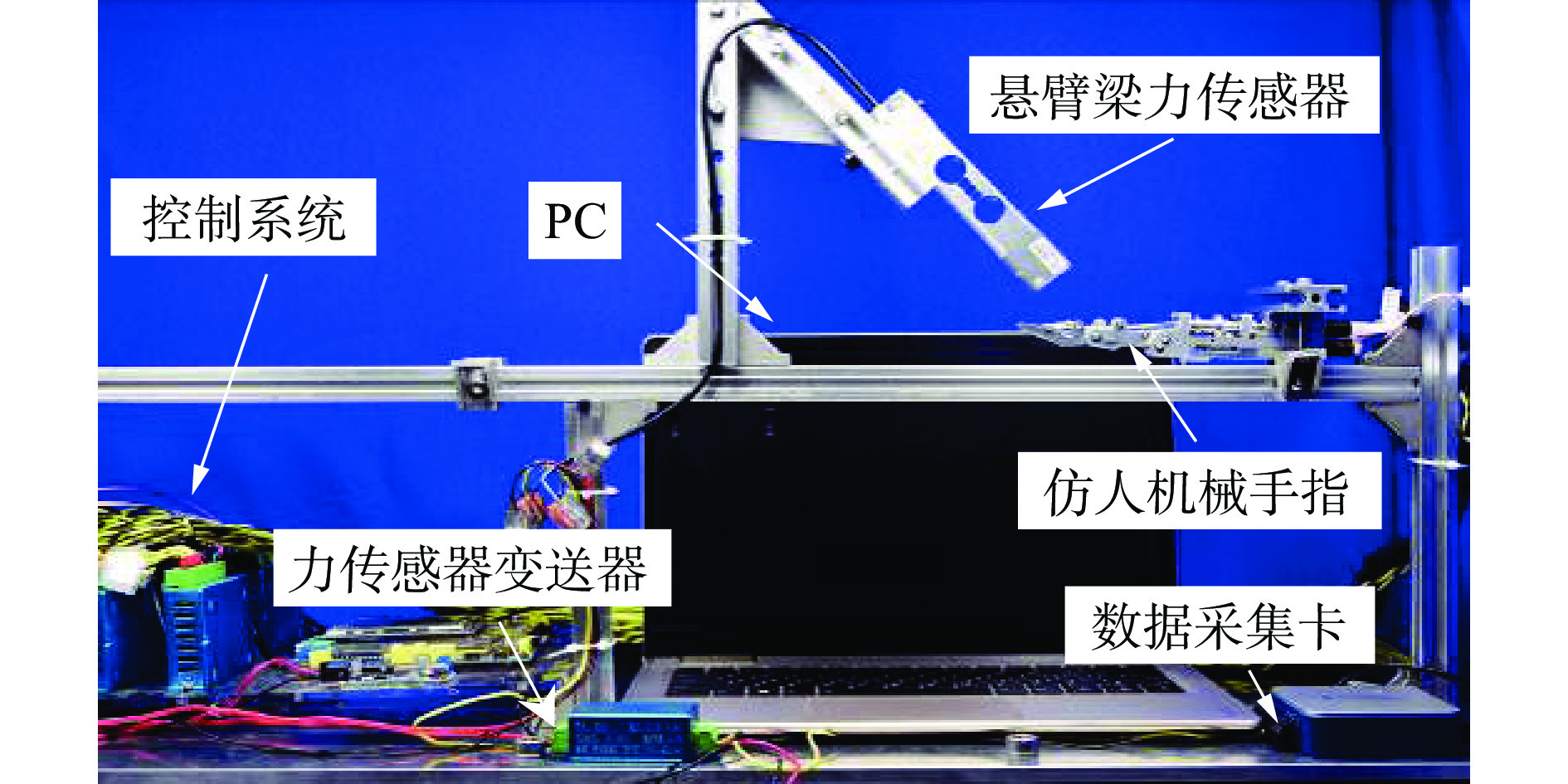
To meet the anthropomorphic requirements of the robot hand, as the power source, the actuator should have the characteristics of small size, light weight, fast output speed and large output force. Based on the twisted string actuation, a new design scheme of the existing 2-speed small transmission mechanism is proposed, which is named as dual-mode twisted string actuator, and the prototype is manufactured. Besides, in order to evaluate the performance of the present actuator, and an anthropomorphic robot finger ismanufactured. At last, the performance of the actuator and the anthropomorphic robot finger is demonstrated via the experiments. The results show that the maximum output force of the actuator is 87.8 N higher than the existing mechanism, and the maximum output speed is 8 times of it. For the robot finger, the maximum fingertip force is 16.0 N and the maximum bending speed is 1552 °/s.
To meet the anthropomorphic requirements of the robot hand, as the power source, the actuator should have the characteristics of small size, light weight, fast output speed and large output force. Based on the twisted string actuation, a new design scheme of the existing 2-speed small transmission mechanism is proposed, which is named as dual-mode twisted string actuator, and the prototype is manufactured. Besides, in order to evaluate the performance of the present actuator, and an anthropomorphic robot finger ismanufactured. At last, the performance of the actuator and the anthropomorphic robot finger is demonstrated via the experiments. The results show that the maximum output force of the actuator is 87.8 N higher than the existing mechanism, and the maximum output speed is 8 times of it. For the robot finger, the maximum fingertip force is 16.0 N and the maximum bending speed is 1552 °/s.












2022, 41(4): 552-558.
doi: 10.13433/j.cnki.1003-8728.20200400
Abstract:
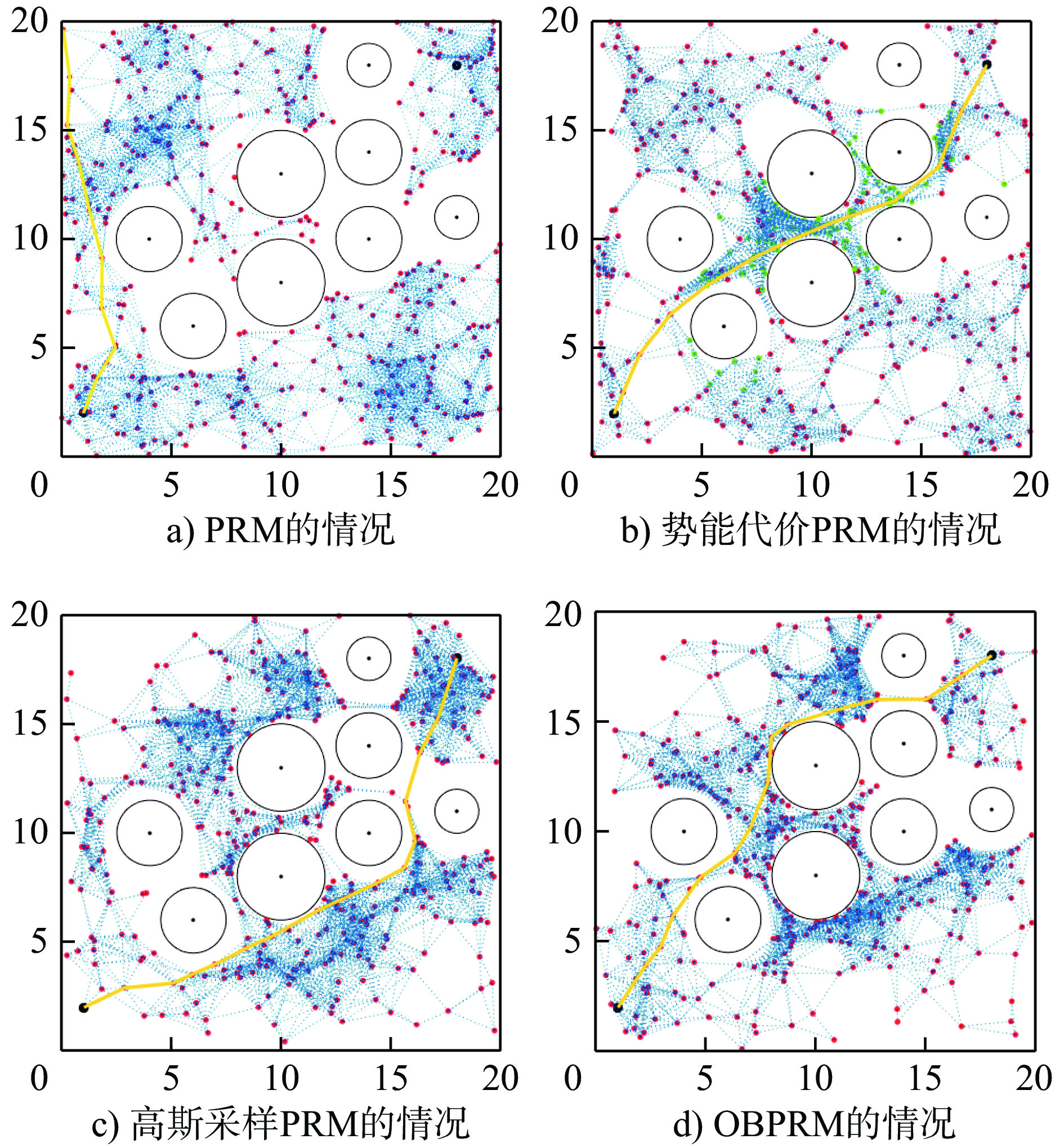
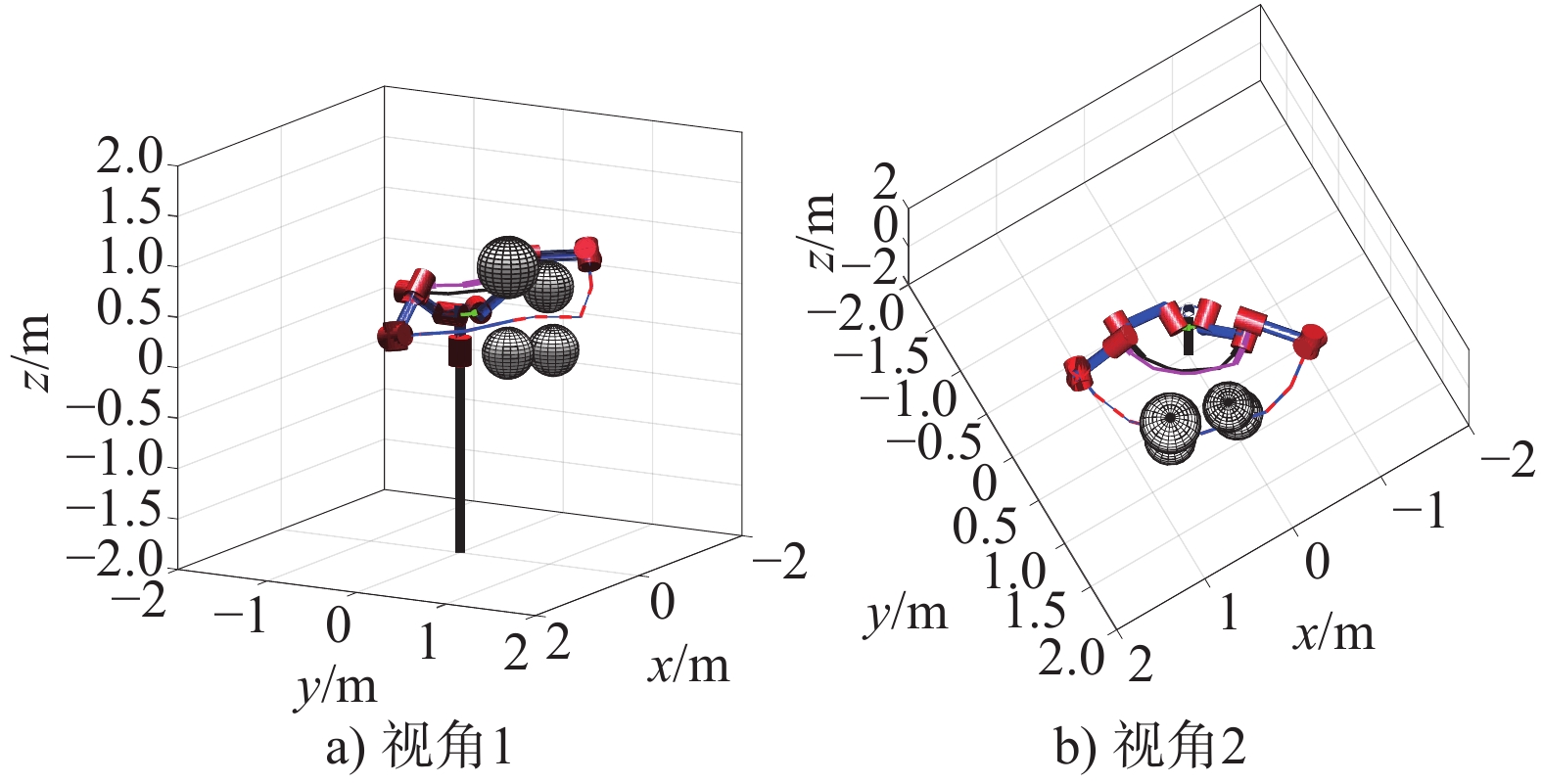
In order to improve the quality of the path planning results of probabilistic roadmap method (PRM), a potential energy cost PRM algorithm was proposed and applied to the obstacle avoidance path planning of manipulators. Potential energy evaluation criteria for any node in planning space was established; difficult area nodes were defined, and an adjustment strategy of the nodes of obstacle space based on Metropolis criteria were studied; the potential energy function of manipulators' links was established. A safe path check method between any configurations of manipulators was given. Simulation test shows that the proposed algorithm is superior to PRM, OBPRM and Gaussian sampling PRM in terms of planning quality and time of planning; in the aspect of the obstacle avoidance path planning of manipulators, the proposed algorithm is superior to PRM algorithm in planning quality, and it is better than OBPRM and Gaussian sampling PRM algorithm in planning quality and time consumption, and can make manipulators avoid all obstacles and reach the objective posture.
In order to improve the quality of the path planning results of probabilistic roadmap method (PRM), a potential energy cost PRM algorithm was proposed and applied to the obstacle avoidance path planning of manipulators. Potential energy evaluation criteria for any node in planning space was established; difficult area nodes were defined, and an adjustment strategy of the nodes of obstacle space based on Metropolis criteria were studied; the potential energy function of manipulators' links was established. A safe path check method between any configurations of manipulators was given. Simulation test shows that the proposed algorithm is superior to PRM, OBPRM and Gaussian sampling PRM in terms of planning quality and time of planning; in the aspect of the obstacle avoidance path planning of manipulators, the proposed algorithm is superior to PRM algorithm in planning quality, and it is better than OBPRM and Gaussian sampling PRM algorithm in planning quality and time consumption, and can make manipulators avoid all obstacles and reach the objective posture.






2022, 41(4): 559-565.
doi: 10.13433/j.cnki.1003-8728.20200380
Abstract:
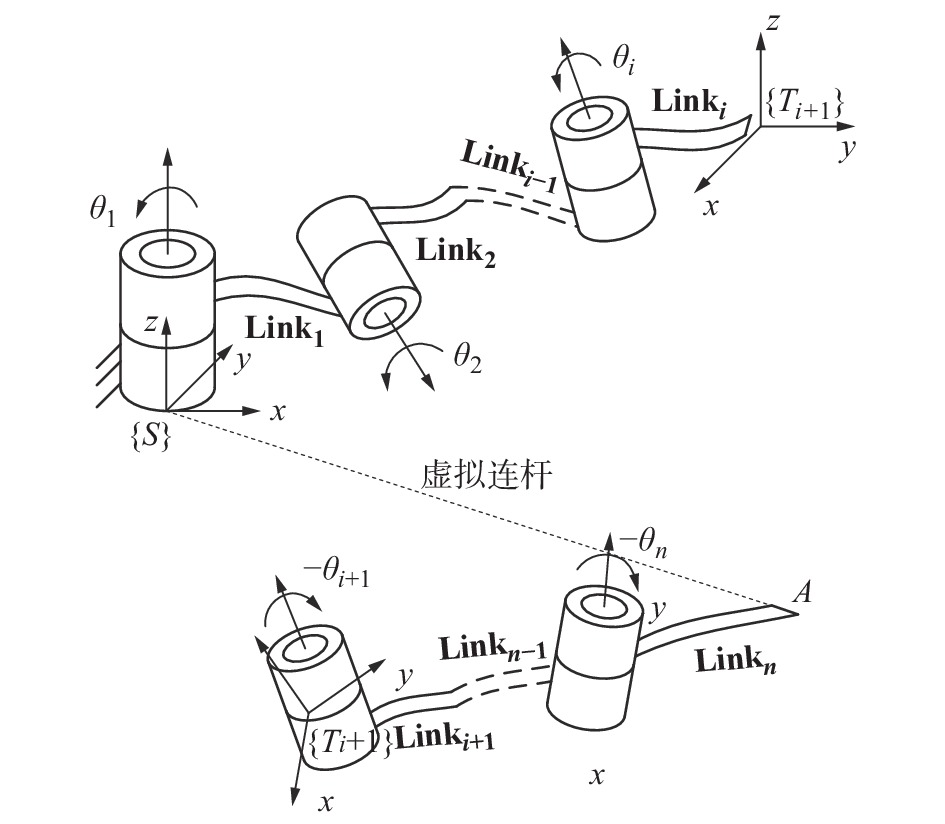
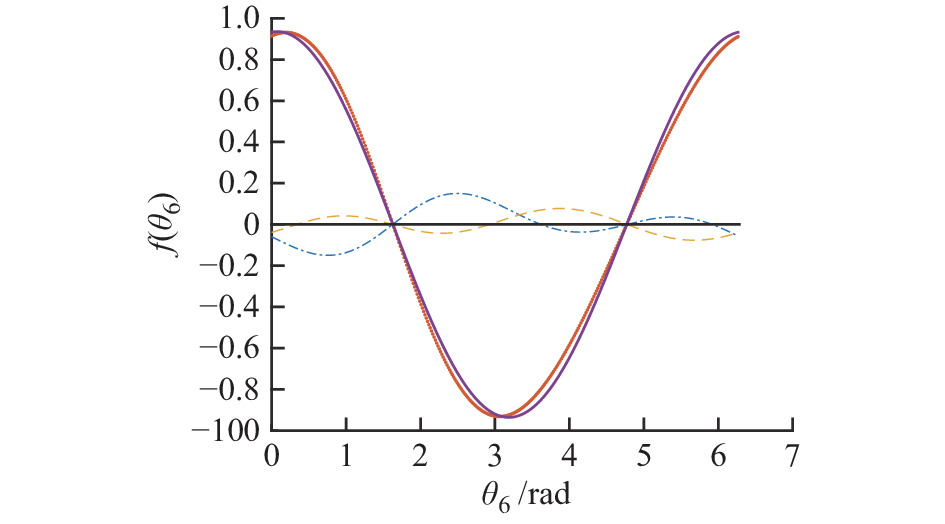
To simplify the derivation of the inverse solution formula of the 6R robot, firstly, the decompositions of a n-degree-of-freedom robot and the general geometric constraints of its reconstructed joints are explained with the deformation of the product of exponential formula based on the screw theory. Then, taking a wrist front offset robot as an example, the decomposition method and the geometric constraints for the reconnection of common non-spherical wrist robots are given. In order to satisfy the constraint conditions, the nonlinear closed equation with only θ6 and the solution formula of other joint angles with θ6 are obtained. The derivation process is of more intuitively physical and geometric significance. Finally, the dichotomy method is used to obtain the solution. The algorithm can obtain all the solutions of the target pose at about 2 ms, and the calculated pose error is within 10−12 mm.
To simplify the derivation of the inverse solution formula of the 6R robot, firstly, the decompositions of a n-degree-of-freedom robot and the general geometric constraints of its reconstructed joints are explained with the deformation of the product of exponential formula based on the screw theory. Then, taking a wrist front offset robot as an example, the decomposition method and the geometric constraints for the reconnection of common non-spherical wrist robots are given. In order to satisfy the constraint conditions, the nonlinear closed equation with only θ6 and the solution formula of other joint angles with θ6 are obtained. The derivation process is of more intuitively physical and geometric significance. Finally, the dichotomy method is used to obtain the solution. The algorithm can obtain all the solutions of the target pose at about 2 ms, and the calculated pose error is within 10−12 mm.



2022, 41(4): 566-572.
doi: 10.13433/j.cnki.1003-8728.20200399
Abstract:
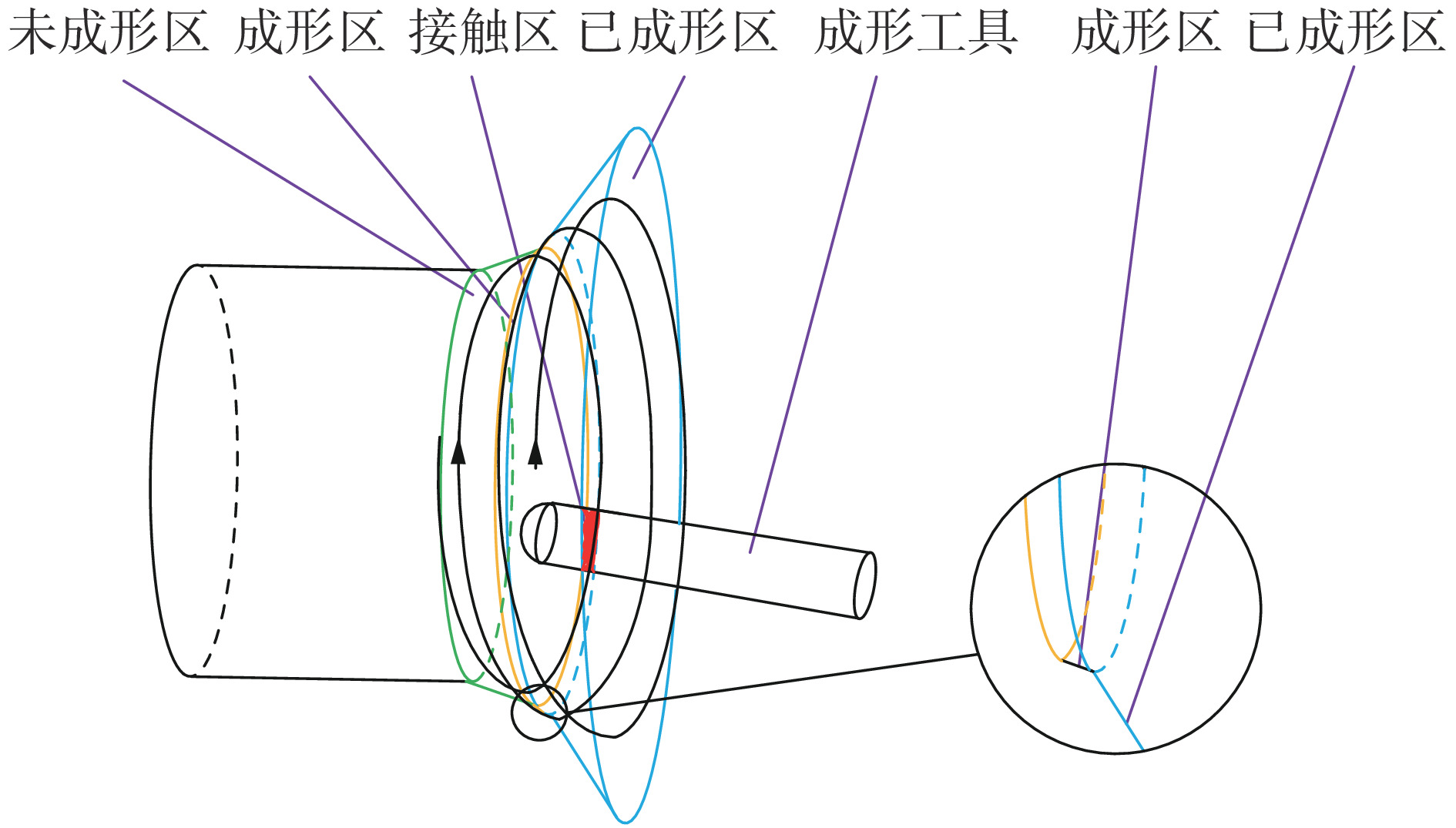
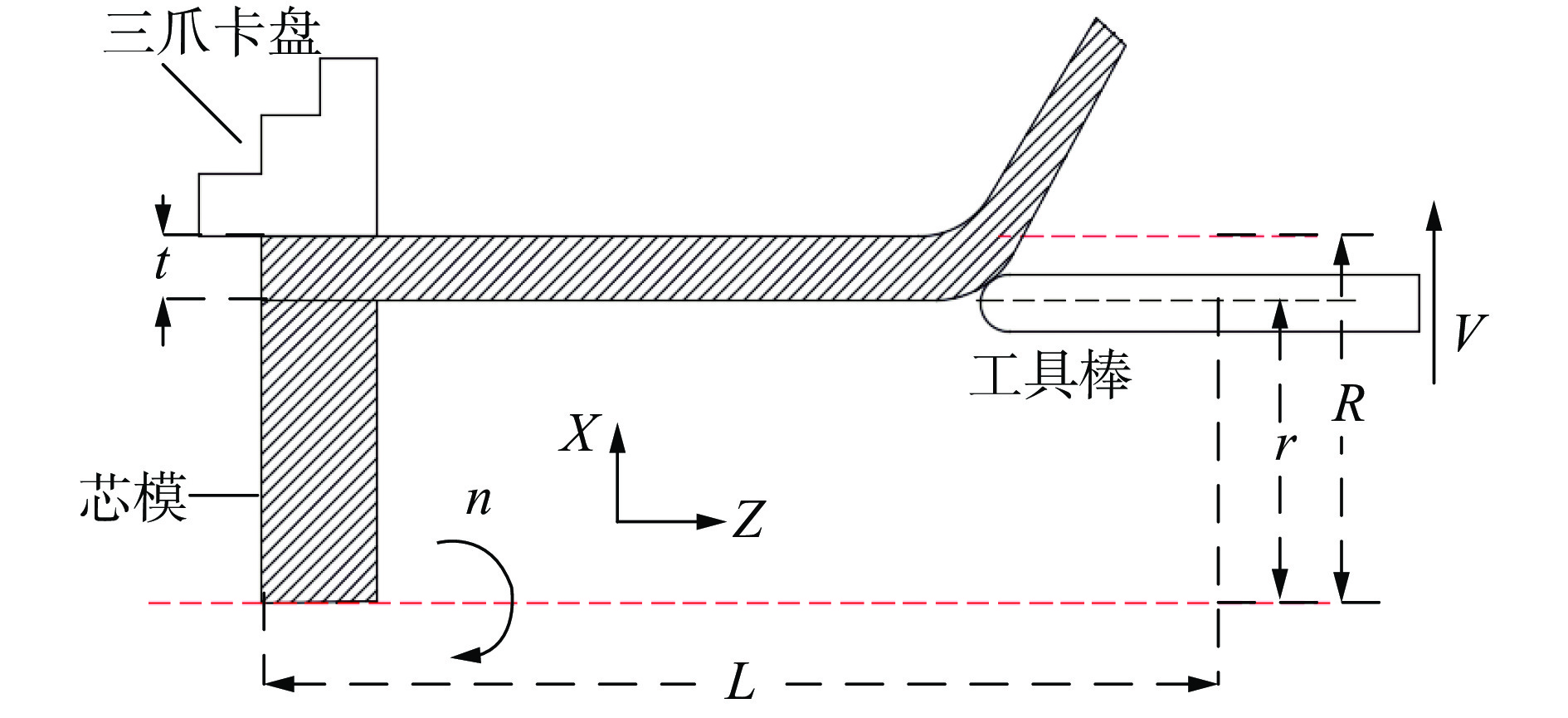
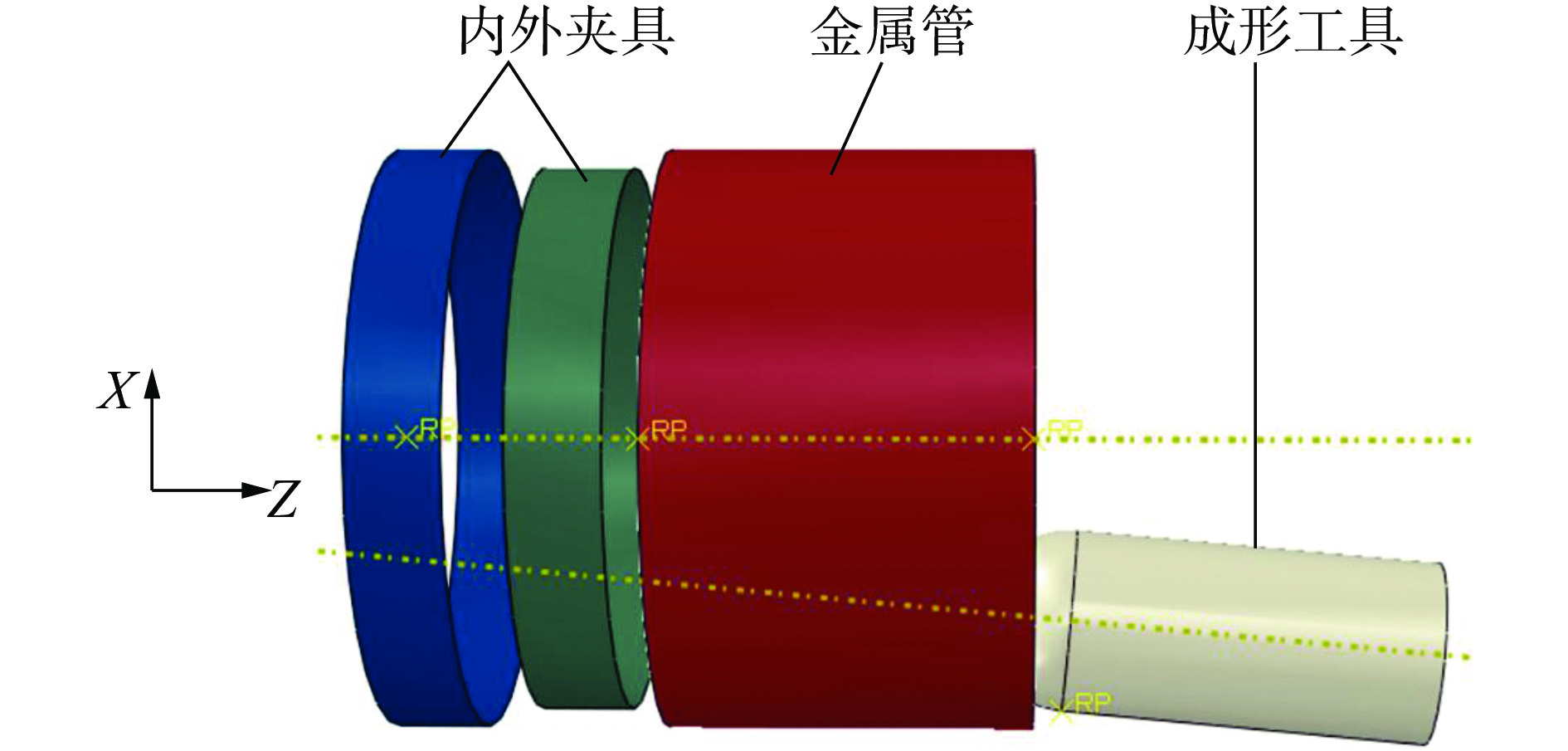
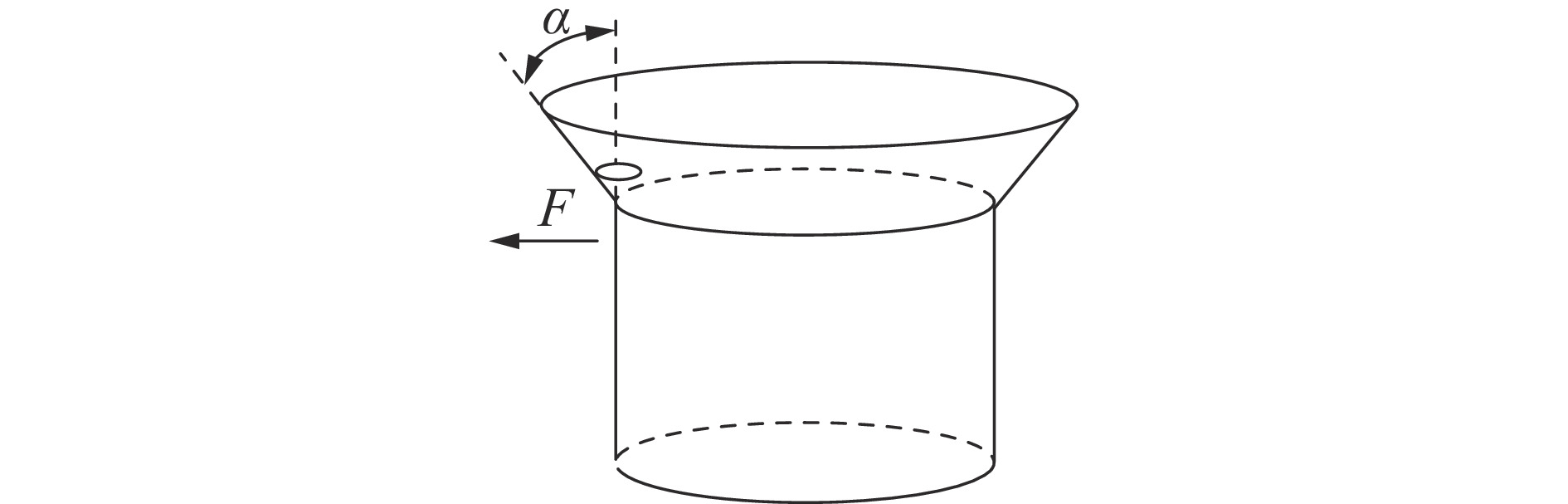
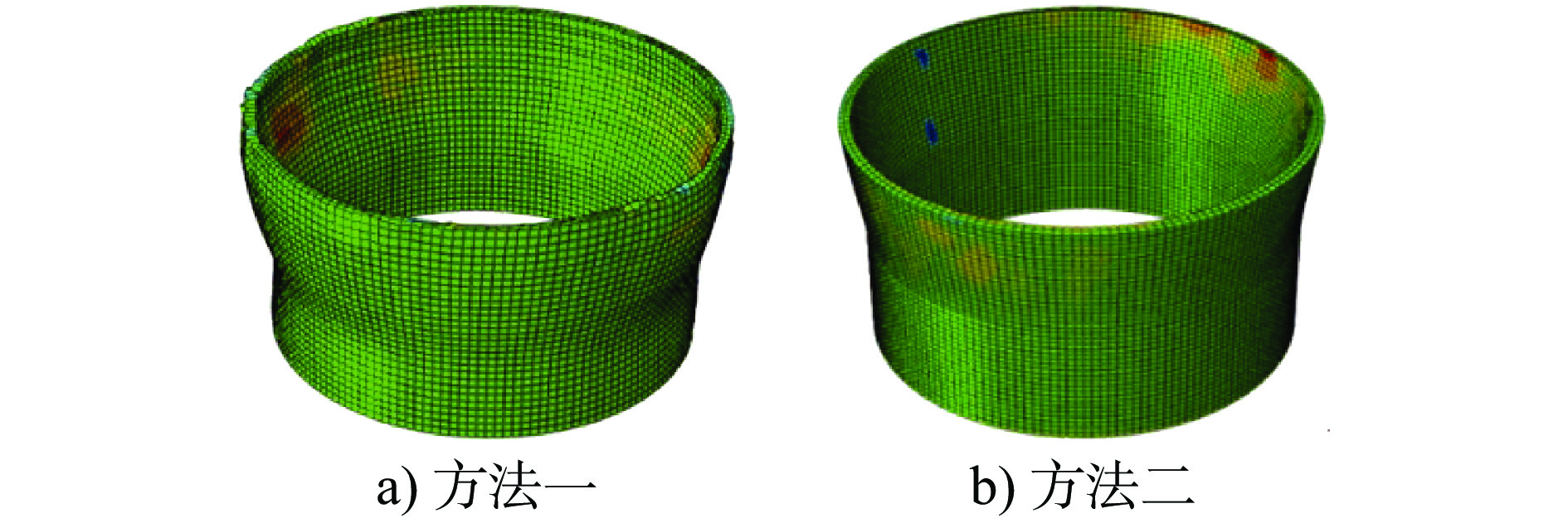
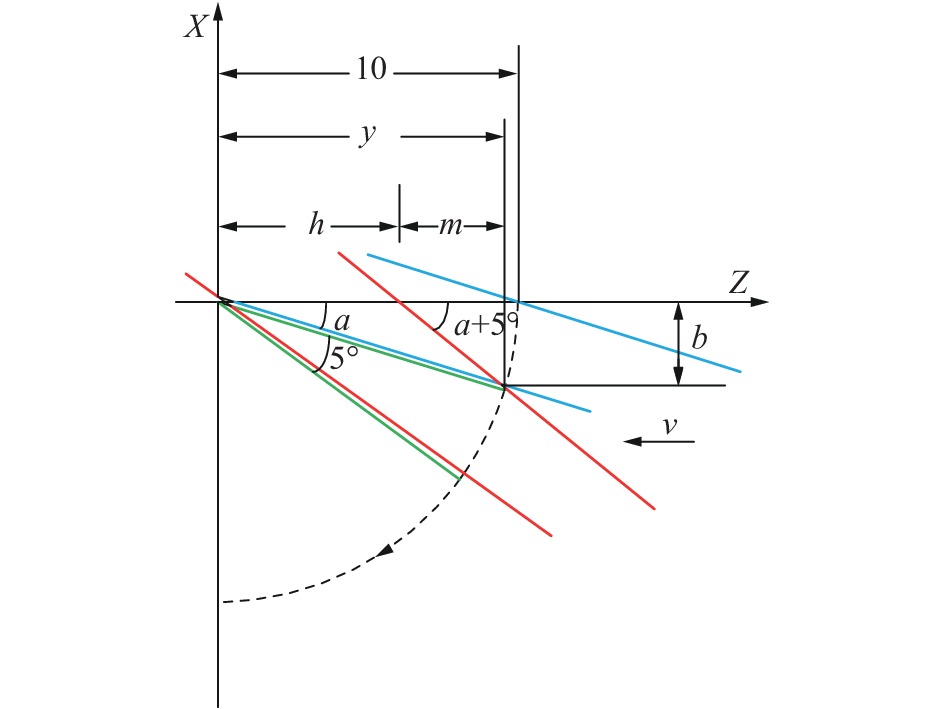
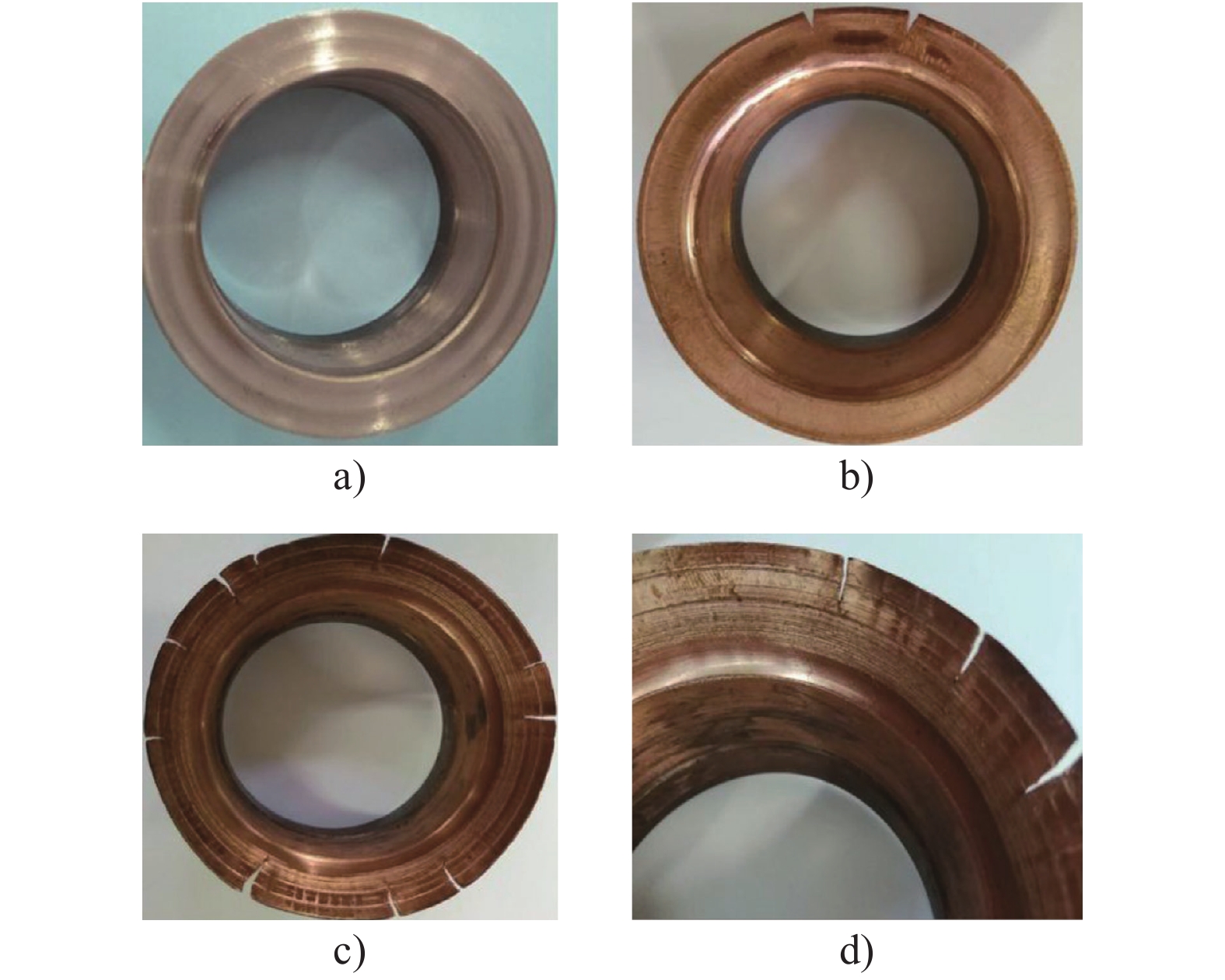
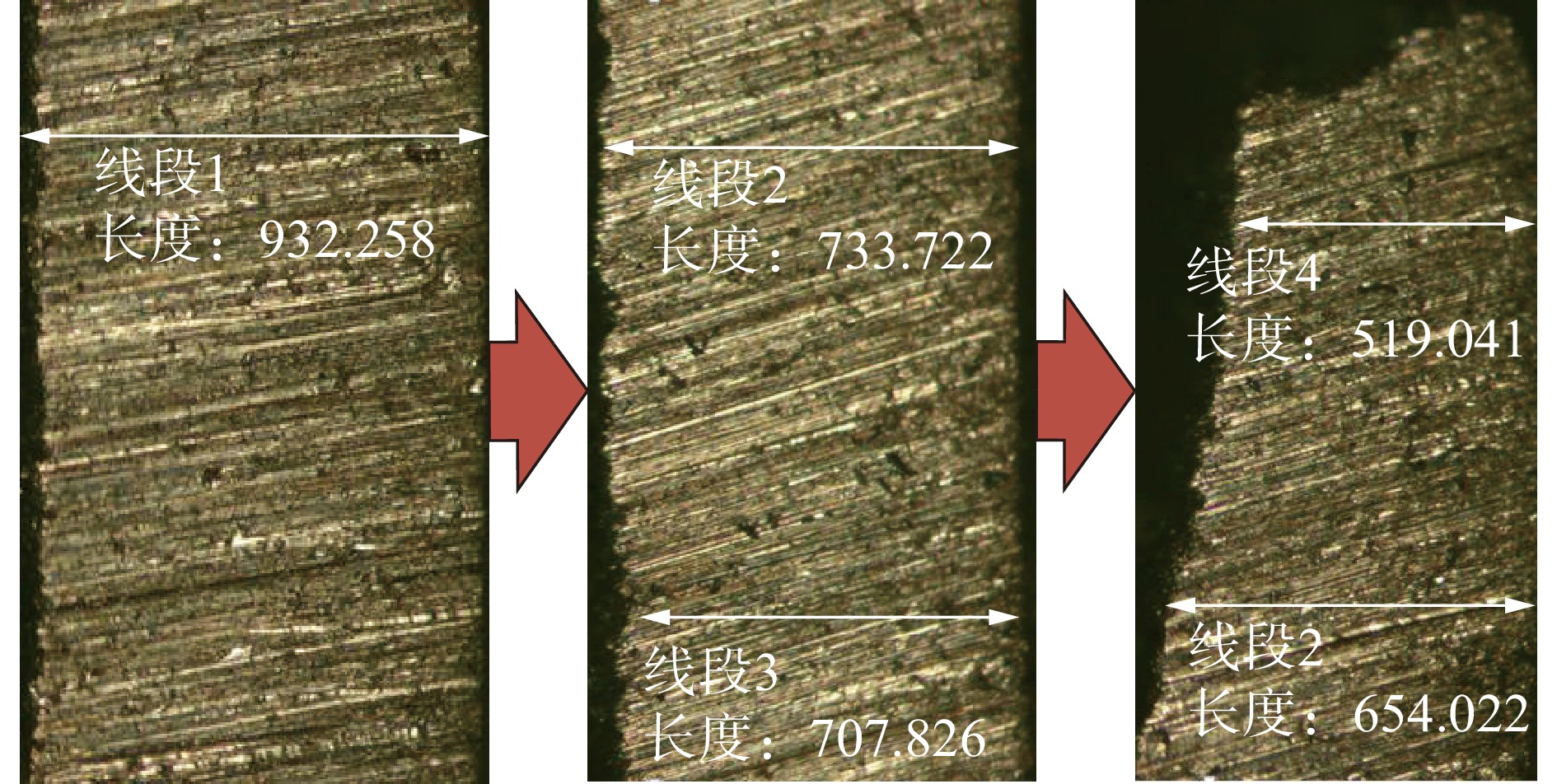
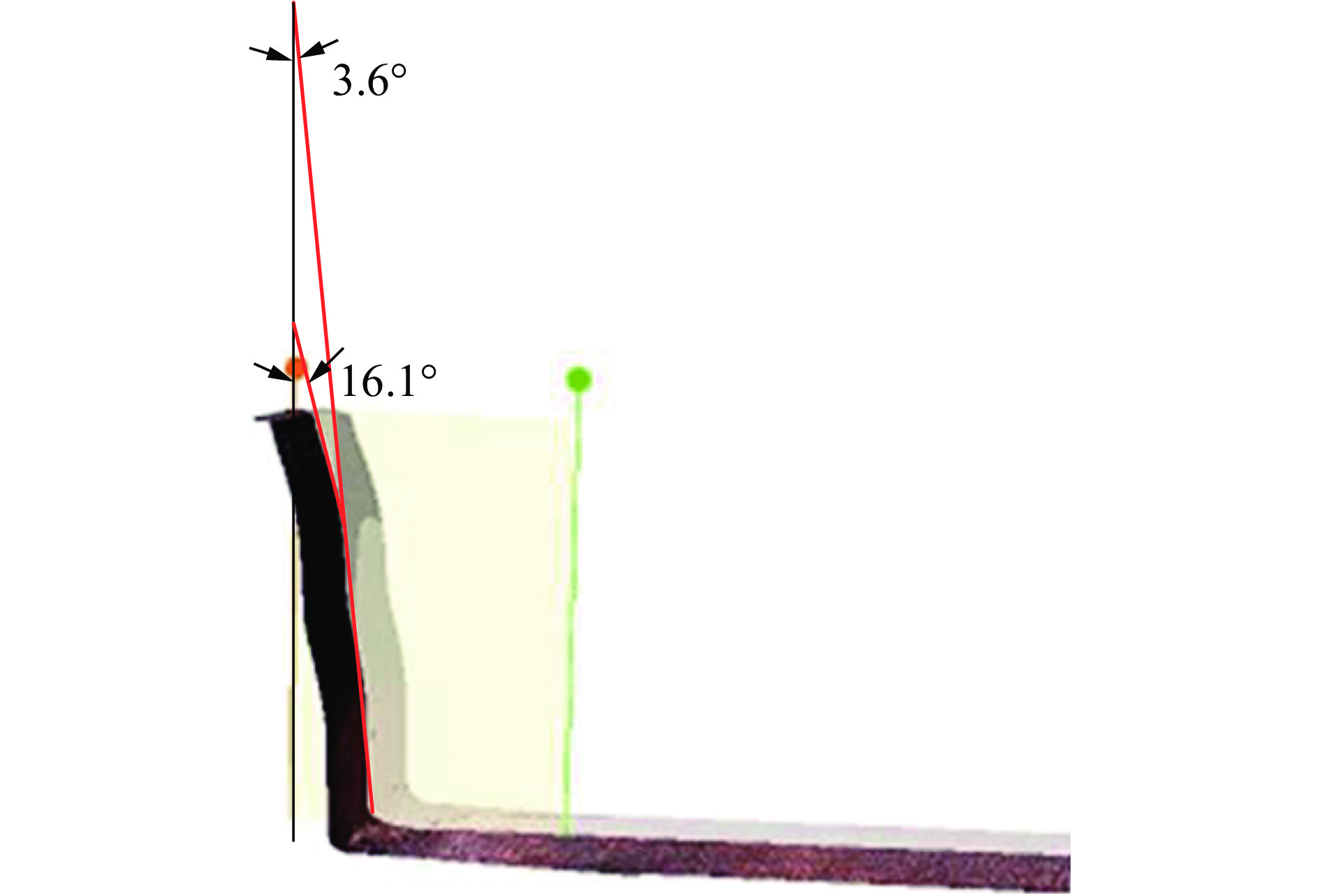
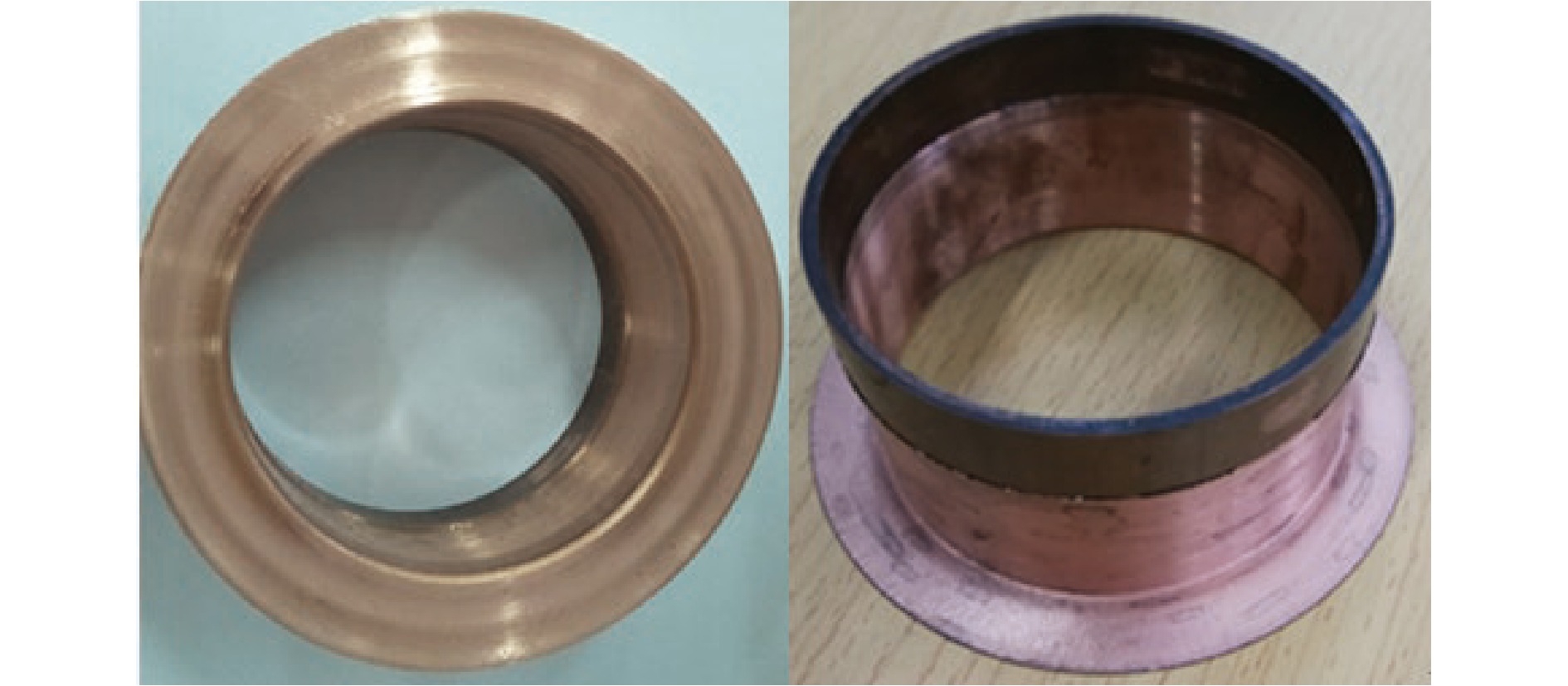
In the single-point incremental flanging of tube, due to the large radial forming force, it is easy to cause the defects such as wrinkling and crack in tube, which reduces the forming quality and accuracy. A process method for flanging the end of a thin-walled metal tube with a ball-head metal rod instead of a spinning wheel and a variable-angle form is proposed. By changing the instantaneous contact state between the tool head and the forming part and the deformation mechanism of the material, the forming force is reducedand the forming qualityis improved. To verify the feasibility of the forming process, a test platform was built, and a single-point incremental variable-angle flanging test of the metal tube end was carried out. The test results showed that the ball head metal rod for the variable-angle flanging of the tube can effectively reduce the initial radial forming force, the surface quality of the formed part is better, and the amplitude of surface fluctuation is smaller.
In the single-point incremental flanging of tube, due to the large radial forming force, it is easy to cause the defects such as wrinkling and crack in tube, which reduces the forming quality and accuracy. A process method for flanging the end of a thin-walled metal tube with a ball-head metal rod instead of a spinning wheel and a variable-angle form is proposed. By changing the instantaneous contact state between the tool head and the forming part and the deformation mechanism of the material, the forming force is reducedand the forming qualityis improved. To verify the feasibility of the forming process, a test platform was built, and a single-point incremental variable-angle flanging test of the metal tube end was carried out. The test results showed that the ball head metal rod for the variable-angle flanging of the tube can effectively reduce the initial radial forming force, the surface quality of the formed part is better, and the amplitude of surface fluctuation is smaller.










2022, 41(4): 573-579.
doi: 10.13433/j.cnki.1003-8728.20200413
Abstract:
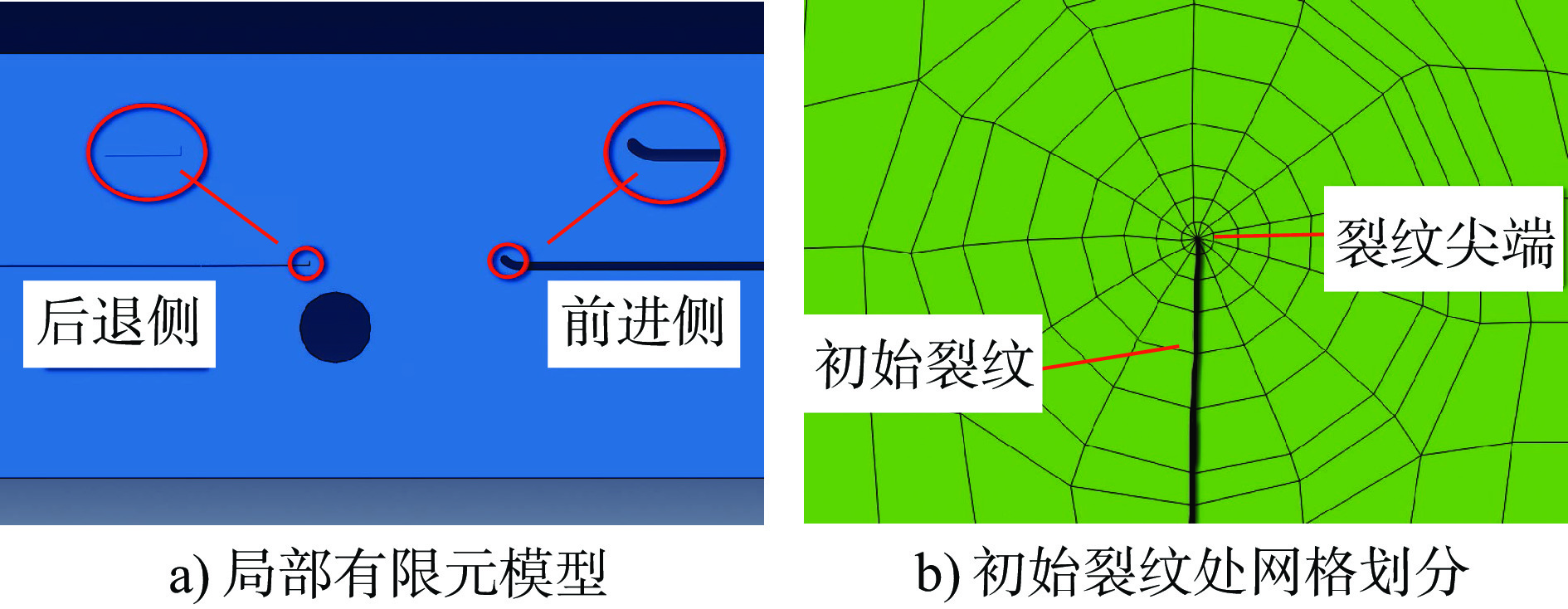
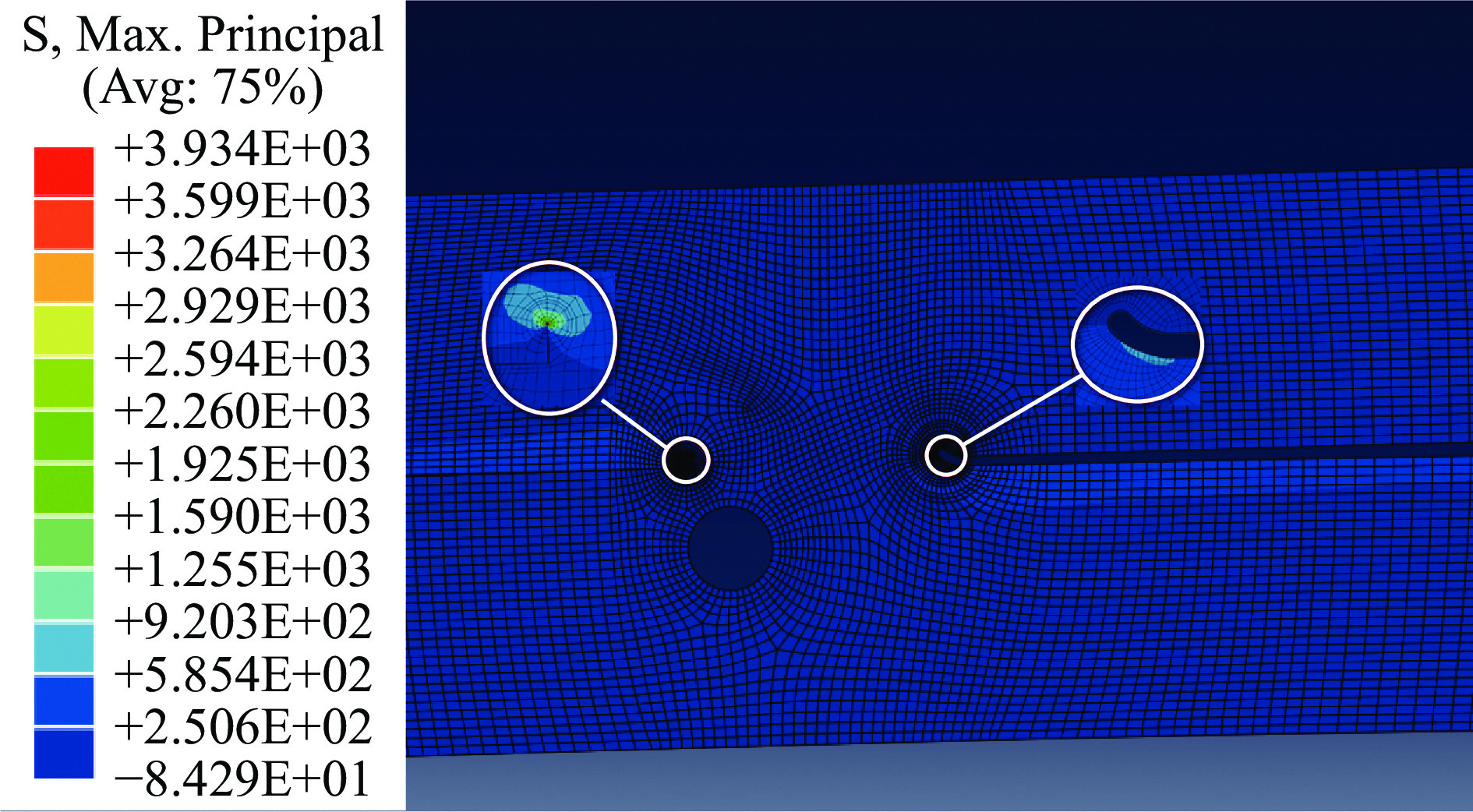
Constant amplitude fatigue experiments were carried out for aluminum alloy friction stir welding (FSW) lap joints with tunneling defects, and the fracture positionsin the jointsare observed, and the influence of the tunneling defects on the fatigue strength of aluminum alloy FSW lap jointsis furtherly studied. The notch stress method and linear elastic fracture mechanics method were used to establish the corresponding finite element models, and the stress changes in the stress concentration area of the model were observed, then the finite element analysis stress result were used to predict the fatigue life of the joints. The results showed that both methods can be used to predict the fatigue life. The prediction results of notch stress method are much closer to the experimental results, while the prediction results of linear elastic fracture mechanics method are relatively conservative. The experimental results and finite element analysis results showed that the tunneling defects have the slight effect on the fatigue strength, in while hook defects have greater effect.
Constant amplitude fatigue experiments were carried out for aluminum alloy friction stir welding (FSW) lap joints with tunneling defects, and the fracture positionsin the jointsare observed, and the influence of the tunneling defects on the fatigue strength of aluminum alloy FSW lap jointsis furtherly studied. The notch stress method and linear elastic fracture mechanics method were used to establish the corresponding finite element models, and the stress changes in the stress concentration area of the model were observed, then the finite element analysis stress result were used to predict the fatigue life of the joints. The results showed that both methods can be used to predict the fatigue life. The prediction results of notch stress method are much closer to the experimental results, while the prediction results of linear elastic fracture mechanics method are relatively conservative. The experimental results and finite element analysis results showed that the tunneling defects have the slight effect on the fatigue strength, in while hook defects have greater effect.











2022, 41(4): 580-586.
doi: 10.13433/j.cnki.1003-8728.20200401
Abstract:
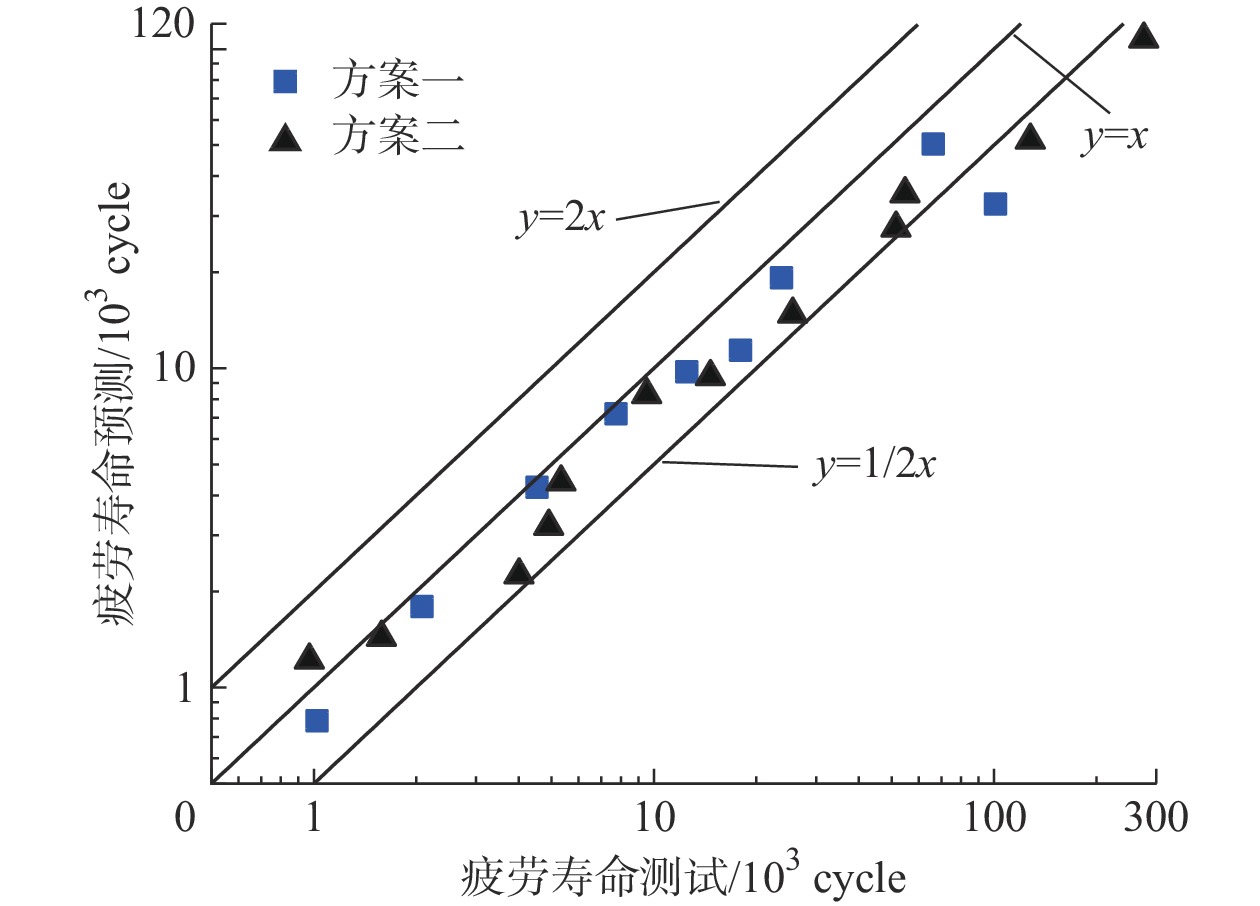
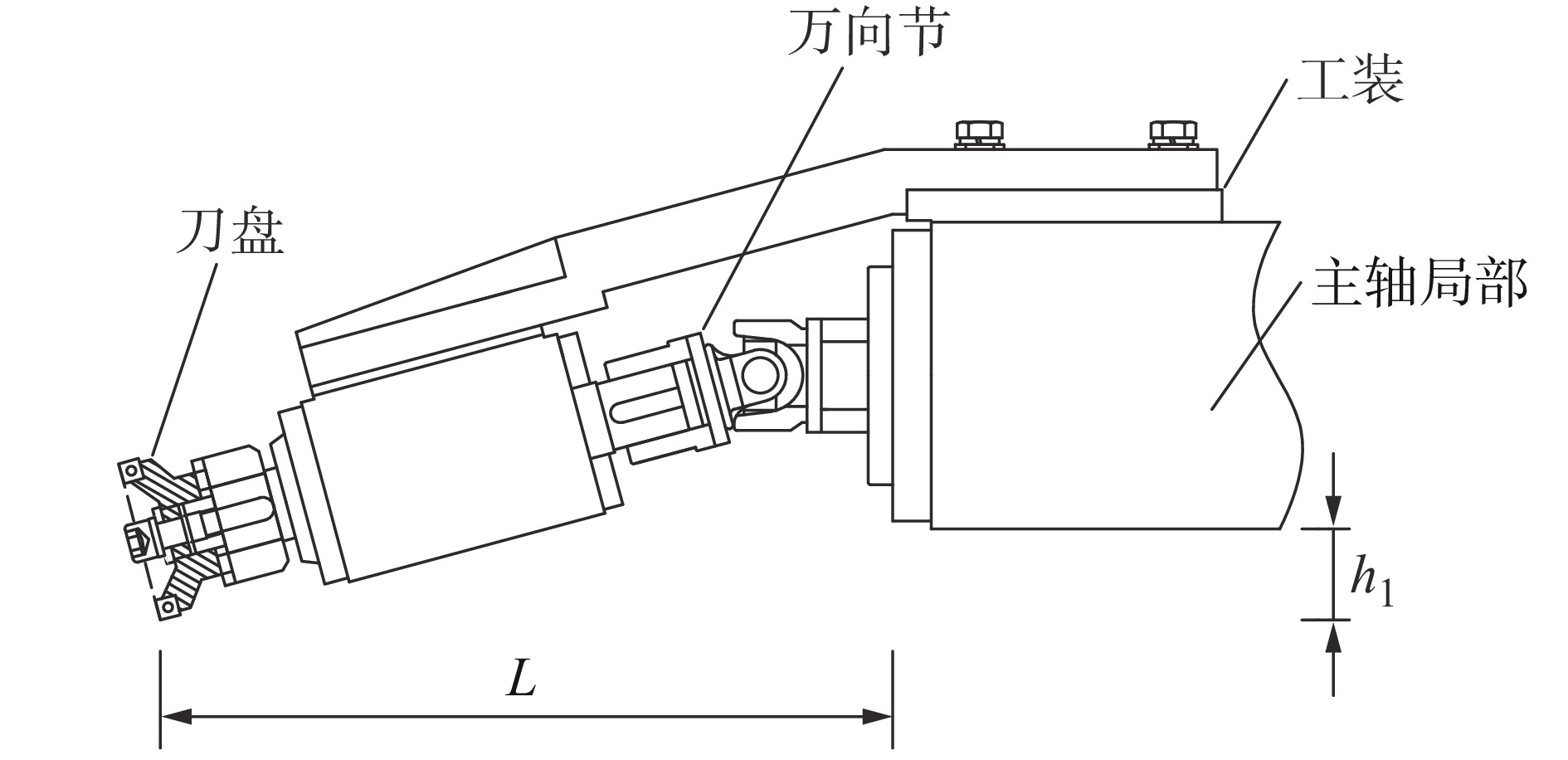
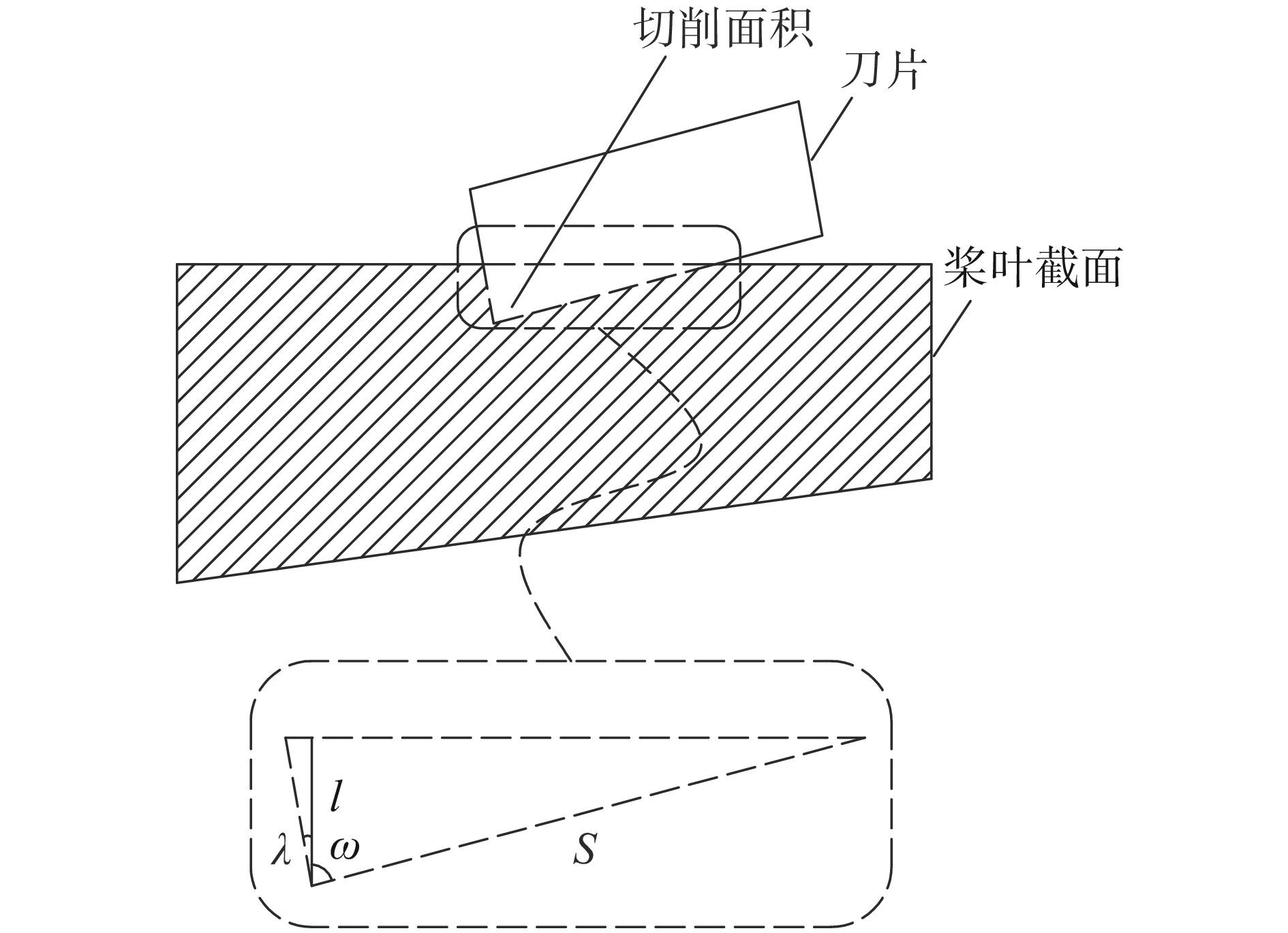
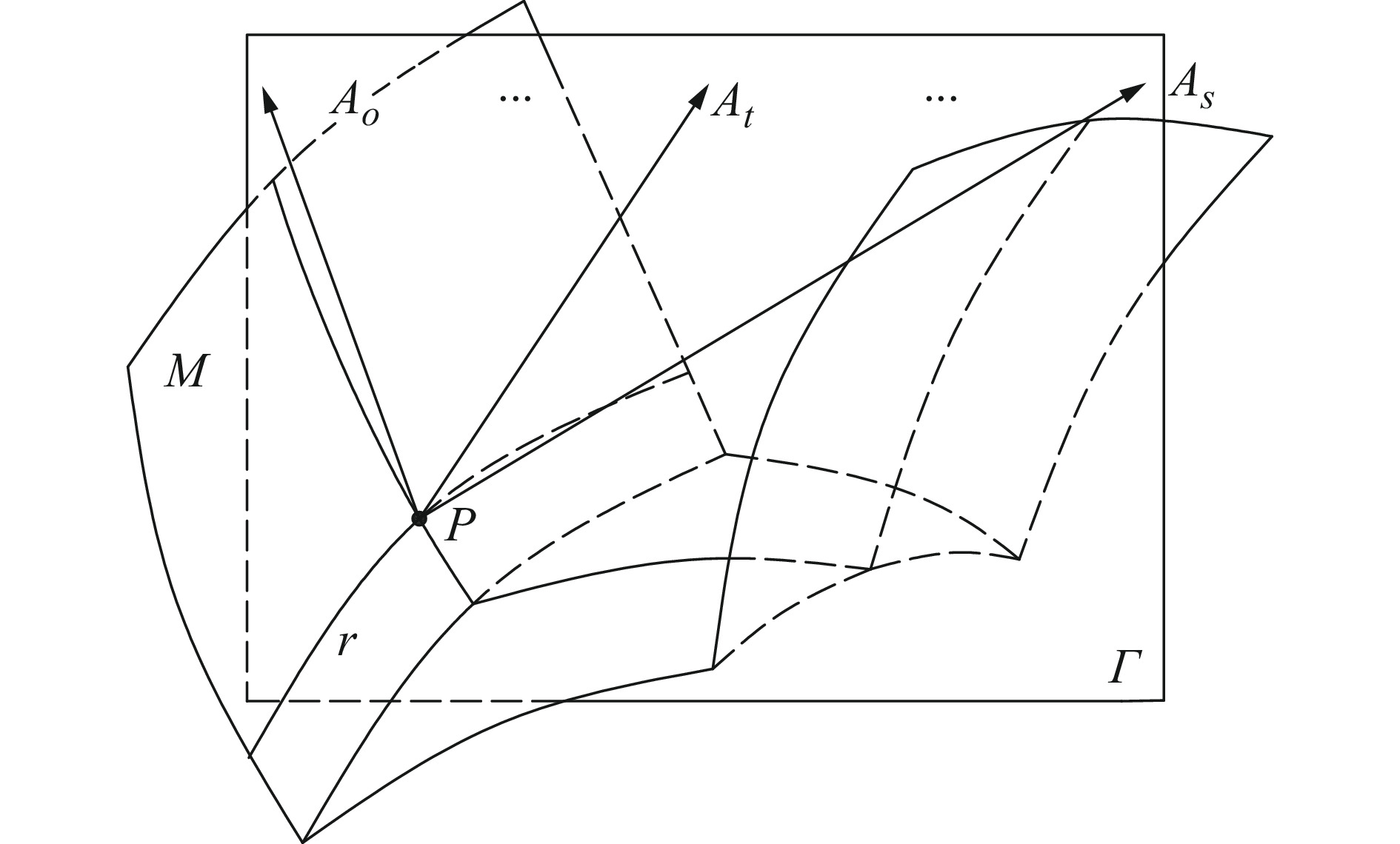
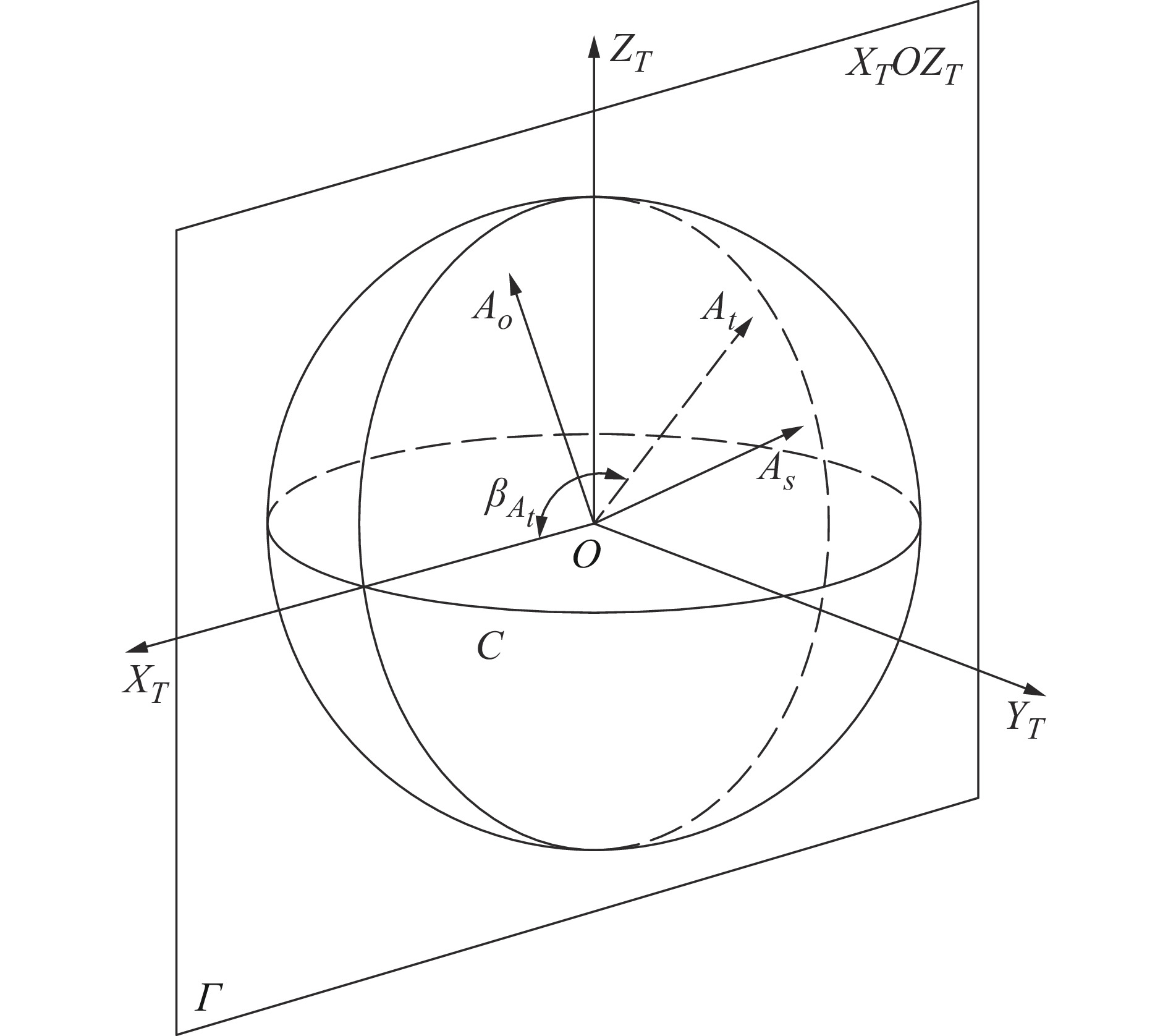
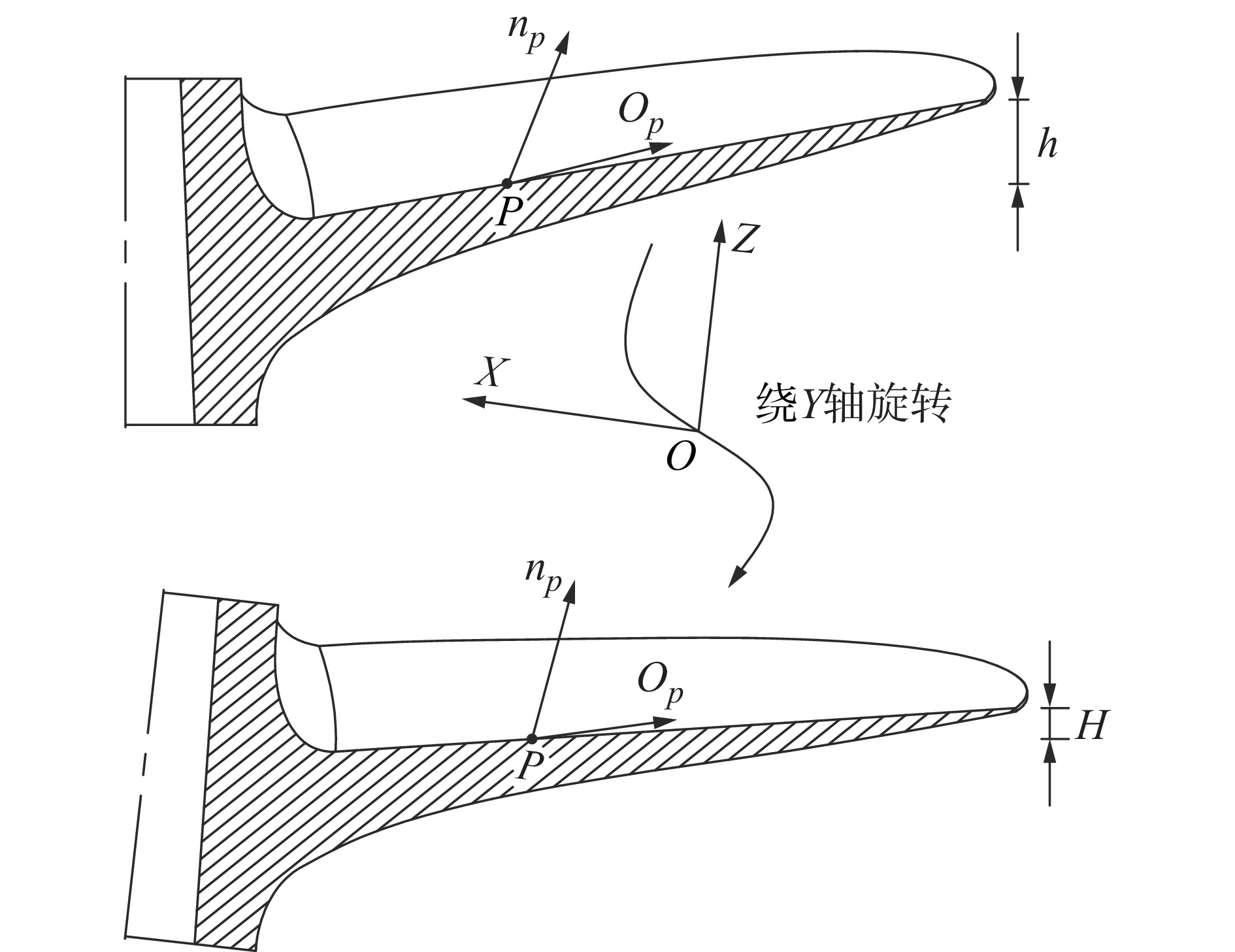
In order to improve the surface quality of five-axis milling parts of propeller blade, a method combining dynamic adjustment of target vector and parameters optimization is proposed. Firstly, the specific processing lines are formed by defining the specific tooling and cutting tools, and the feasible regions of complex propeller areas are divided to obtain the feasible regions of complex areas such as propeller hub. Secondly, the interference adjustment coordinate system is established to make the interference adjustment for blade machining and hub machining, and the offset compensation is obtained for each axis. Then, the mechanics model for blade profile in the milling was established, and the force calculation in the milling was carried out by AdvantEdge FEM software to obtain the optimal parameters. Finally, the five-axis milling experiment of the propeller blade profile is carried out, the results are checked and analyzed, and the rationality in the milling is verified.
In order to improve the surface quality of five-axis milling parts of propeller blade, a method combining dynamic adjustment of target vector and parameters optimization is proposed. Firstly, the specific processing lines are formed by defining the specific tooling and cutting tools, and the feasible regions of complex propeller areas are divided to obtain the feasible regions of complex areas such as propeller hub. Secondly, the interference adjustment coordinate system is established to make the interference adjustment for blade machining and hub machining, and the offset compensation is obtained for each axis. Then, the mechanics model for blade profile in the milling was established, and the force calculation in the milling was carried out by AdvantEdge FEM software to obtain the optimal parameters. Finally, the five-axis milling experiment of the propeller blade profile is carried out, the results are checked and analyzed, and the rationality in the milling is verified.












2022, 41(4): 587-593.
doi: 10.13433/j.cnki.1003-8728.20200395
Abstract:
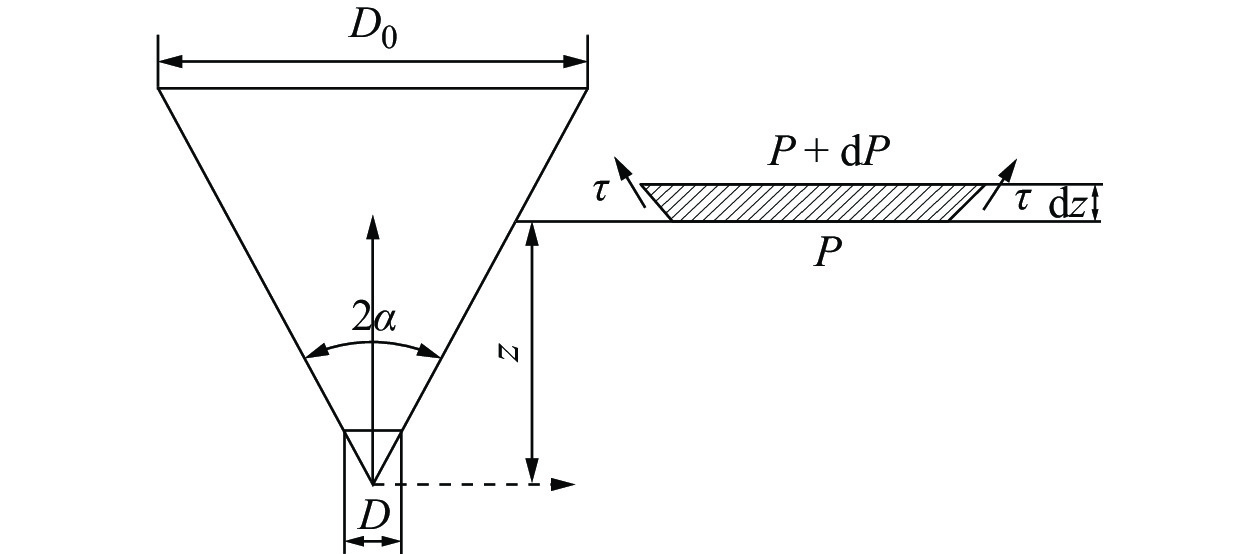
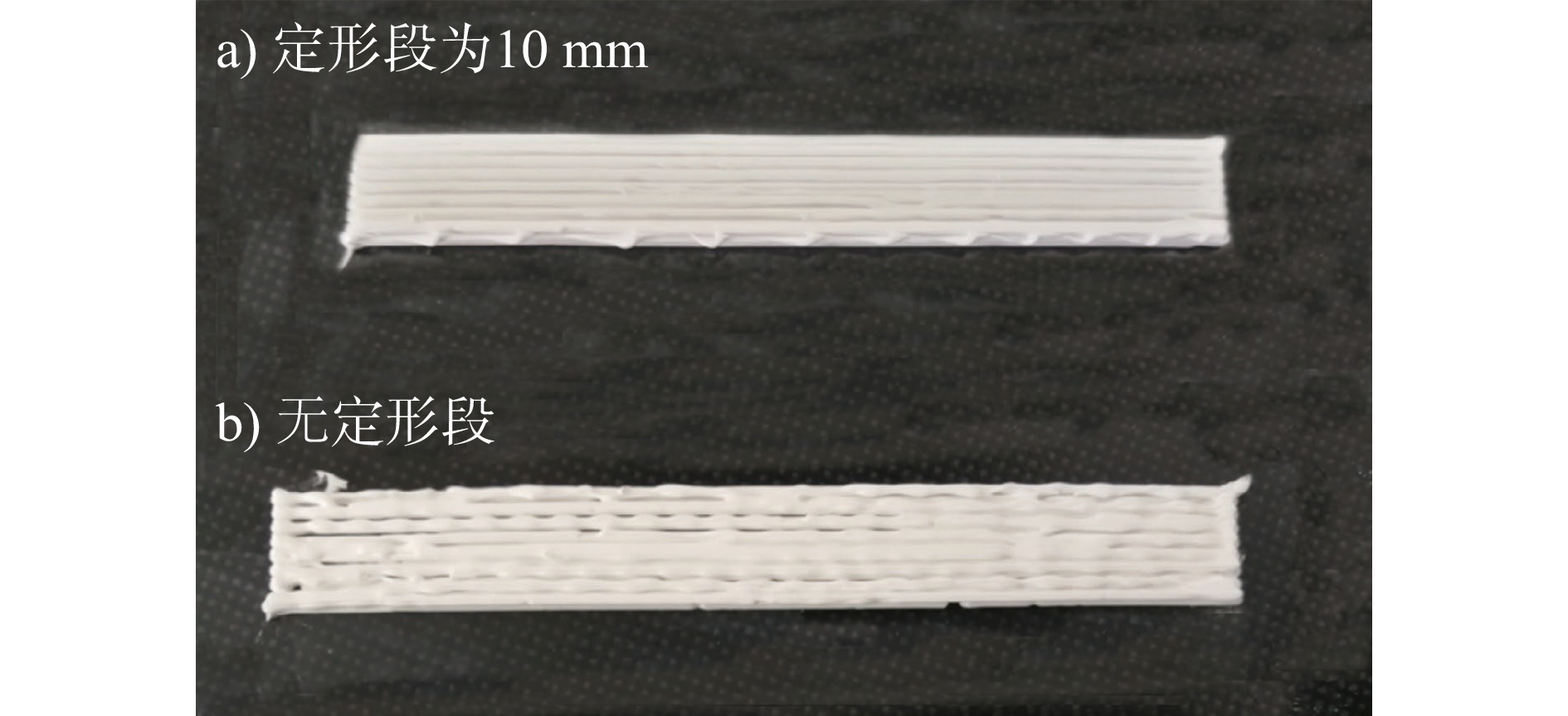
In order to reduce the extrusion force in the ceramic 3D printing, a model for the relationship between the extrusion force and the material rheological properties as well as the structure of the extrusion device and the extrusion of speed is derived on the basis of the Power-law fluid model. The structural parameters of the extrusion nozzle are the key factors affecting the extrusion force. Under the same conditions of other process parameters, the combination of the structural parameters of the extrusion nozzle that achieves the minimum extrusion force can be determined by calculating the model. It can be seen from the experimental verification that the optimized extrusion nozzle can effectively reduce the extrusion force generated in the printing, and improve the forming effect of the ceramic parts.
In order to reduce the extrusion force in the ceramic 3D printing, a model for the relationship between the extrusion force and the material rheological properties as well as the structure of the extrusion device and the extrusion of speed is derived on the basis of the Power-law fluid model. The structural parameters of the extrusion nozzle are the key factors affecting the extrusion force. Under the same conditions of other process parameters, the combination of the structural parameters of the extrusion nozzle that achieves the minimum extrusion force can be determined by calculating the model. It can be seen from the experimental verification that the optimized extrusion nozzle can effectively reduce the extrusion force generated in the printing, and improve the forming effect of the ceramic parts.







2022, 41(4): 594-601.
doi: 10.13433/j.cnki.1003-8728.20200402
Abstract:
Aiming at the problem that common display accessories are difficult to quickly classify and recognize in real time, the image classification and recognition of display accessoriesis takenas the core, and a fast visual recognition system for display accessories based on the supervised learningis built. Firstly, low-pass median filtering is performed on the display accessories images collected in real time on the production line to eliminate the noise, isolated bright spots or dark spots in the image, and Gaussian filter is used to weaken the gray changes of image pixels to make the image surface uniform and smooth. Secondly, the sample set to train the supervised learning classifier for 6 timesis used. Finally, the supervised learning classifier to classify and recognize the display accessoriesis used. The experimental comparison results based on the four classification and recognition methods show that the present method uses the image preprocessing to make up for the insufficient classification andrecognition accuracy of the supervised learning classifier due to the influence of noise. It is significantly better than the other three in terms of the real-time and robustness. It takes only 12.9 ms to complete the classification and recognition, and the recognition accuracy of each accessory is over 96%, and the classification accuracy is 100%. The present algorithm meets the engineering application and real-time sorting requirements of display accessory classification and recognition.
Aiming at the problem that common display accessories are difficult to quickly classify and recognize in real time, the image classification and recognition of display accessoriesis takenas the core, and a fast visual recognition system for display accessories based on the supervised learningis built. Firstly, low-pass median filtering is performed on the display accessories images collected in real time on the production line to eliminate the noise, isolated bright spots or dark spots in the image, and Gaussian filter is used to weaken the gray changes of image pixels to make the image surface uniform and smooth. Secondly, the sample set to train the supervised learning classifier for 6 timesis used. Finally, the supervised learning classifier to classify and recognize the display accessoriesis used. The experimental comparison results based on the four classification and recognition methods show that the present method uses the image preprocessing to make up for the insufficient classification andrecognition accuracy of the supervised learning classifier due to the influence of noise. It is significantly better than the other three in terms of the real-time and robustness. It takes only 12.9 ms to complete the classification and recognition, and the recognition accuracy of each accessory is over 96%, and the classification accuracy is 100%. The present algorithm meets the engineering application and real-time sorting requirements of display accessory classification and recognition.






2022, 41(4): 602-609.
doi: 10.13433/j.cnki.1003-8728.20200481
Abstract:
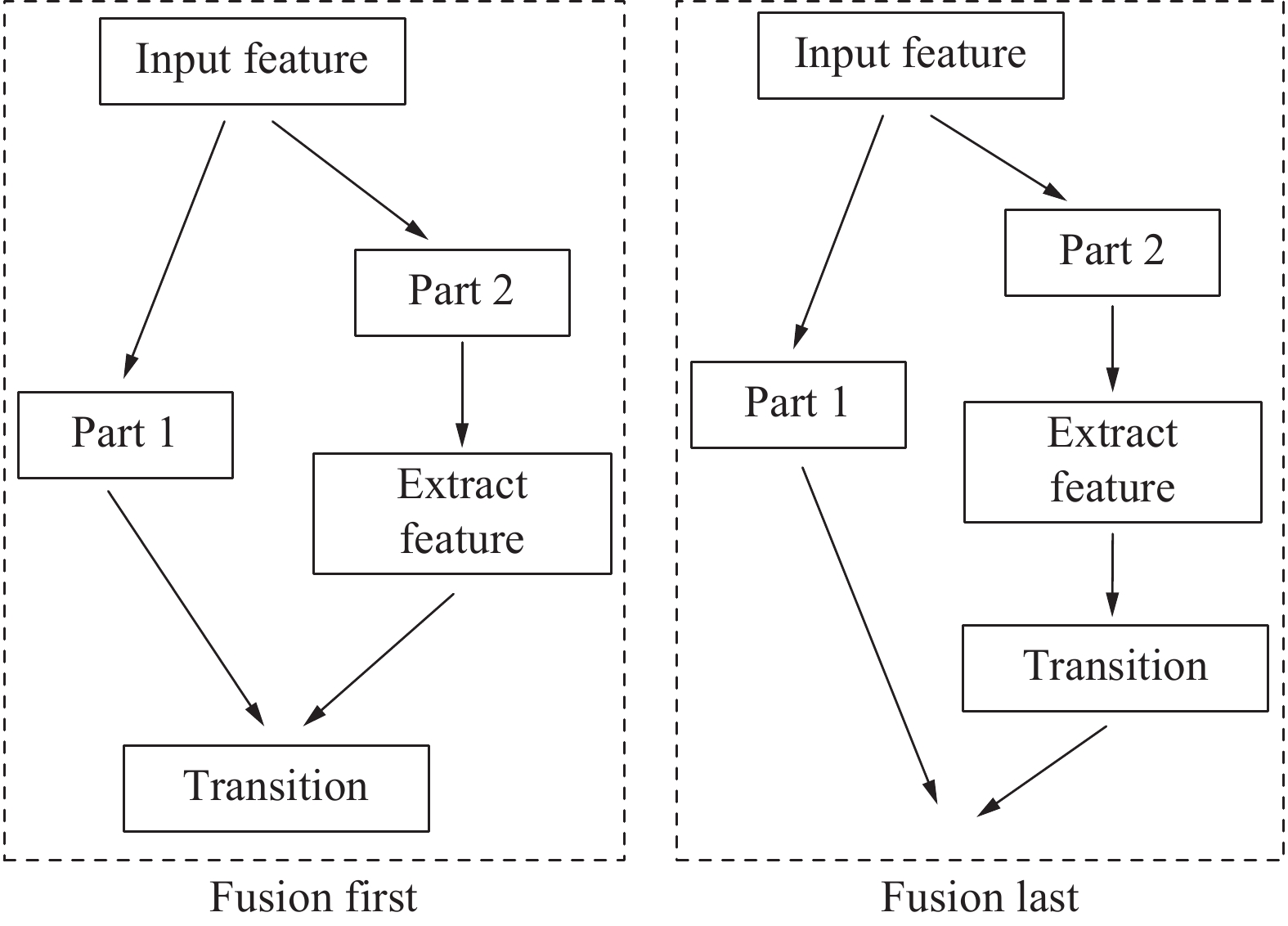
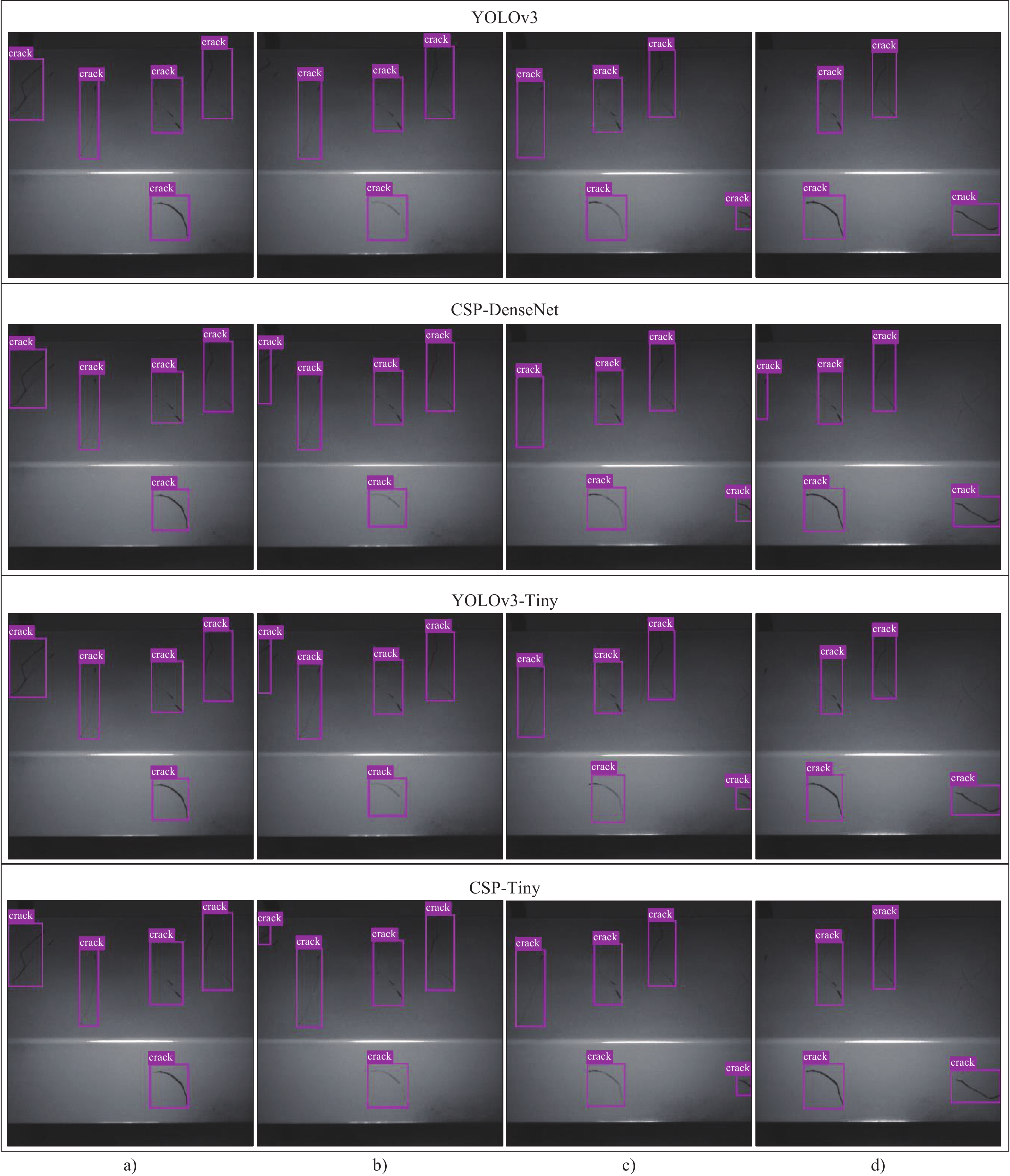
Steel beams are widely used in engineering projects, and if their surface cracks are not found in time, they may bring potential safety hazards. In this paper, a lightweight convolutional neural network with a cross-stage hierarchical structure is used to achieve rapid real-time detection of surface cracks in steel beam. Firstly, a cross-stage local network to build a backbone network for feature extraction is used, which not only enriches the gradient update path, but also helps extract the shallow features of cracks. Secondly, the cross-stage layering module is embedded as a feature extractor into one of the branches of the cross-stage layered structure to obtain a lightweight feature extraction module, which greatly improves the speed of crack detection. Finally, the multi-scale feature fusion will be combined with the YOLO layer to complete the object detection. Experiments show that the highest mAP of the lightweight convolutional neural network with a cross-stage layered structure is 93.59%, and the frame rate is 30.3 s−1. Under the premise that the detection performance gap is not big, its detection speed is 4 times faster than YOLOv3 and 4.5 times faster than YOLOv4.
Steel beams are widely used in engineering projects, and if their surface cracks are not found in time, they may bring potential safety hazards. In this paper, a lightweight convolutional neural network with a cross-stage hierarchical structure is used to achieve rapid real-time detection of surface cracks in steel beam. Firstly, a cross-stage local network to build a backbone network for feature extraction is used, which not only enriches the gradient update path, but also helps extract the shallow features of cracks. Secondly, the cross-stage layering module is embedded as a feature extractor into one of the branches of the cross-stage layered structure to obtain a lightweight feature extraction module, which greatly improves the speed of crack detection. Finally, the multi-scale feature fusion will be combined with the YOLO layer to complete the object detection. Experiments show that the highest mAP of the lightweight convolutional neural network with a cross-stage layered structure is 93.59%, and the frame rate is 30.3 s−1. Under the premise that the detection performance gap is not big, its detection speed is 4 times faster than YOLOv3 and 4.5 times faster than YOLOv4.








2022, 41(4): 610-618.
doi: 10.13433/j.cnki.1003-8728.20200411
Abstract:
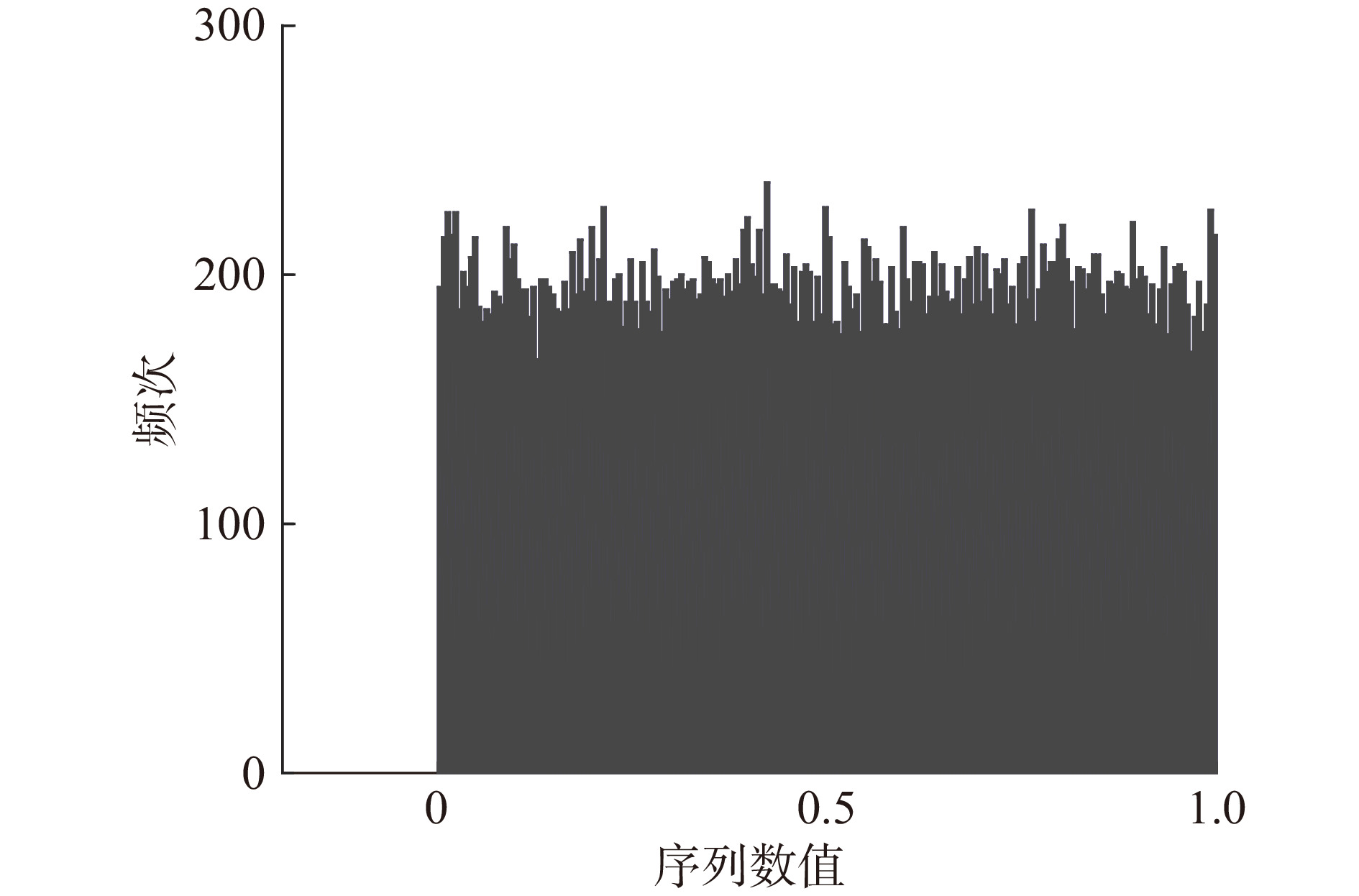
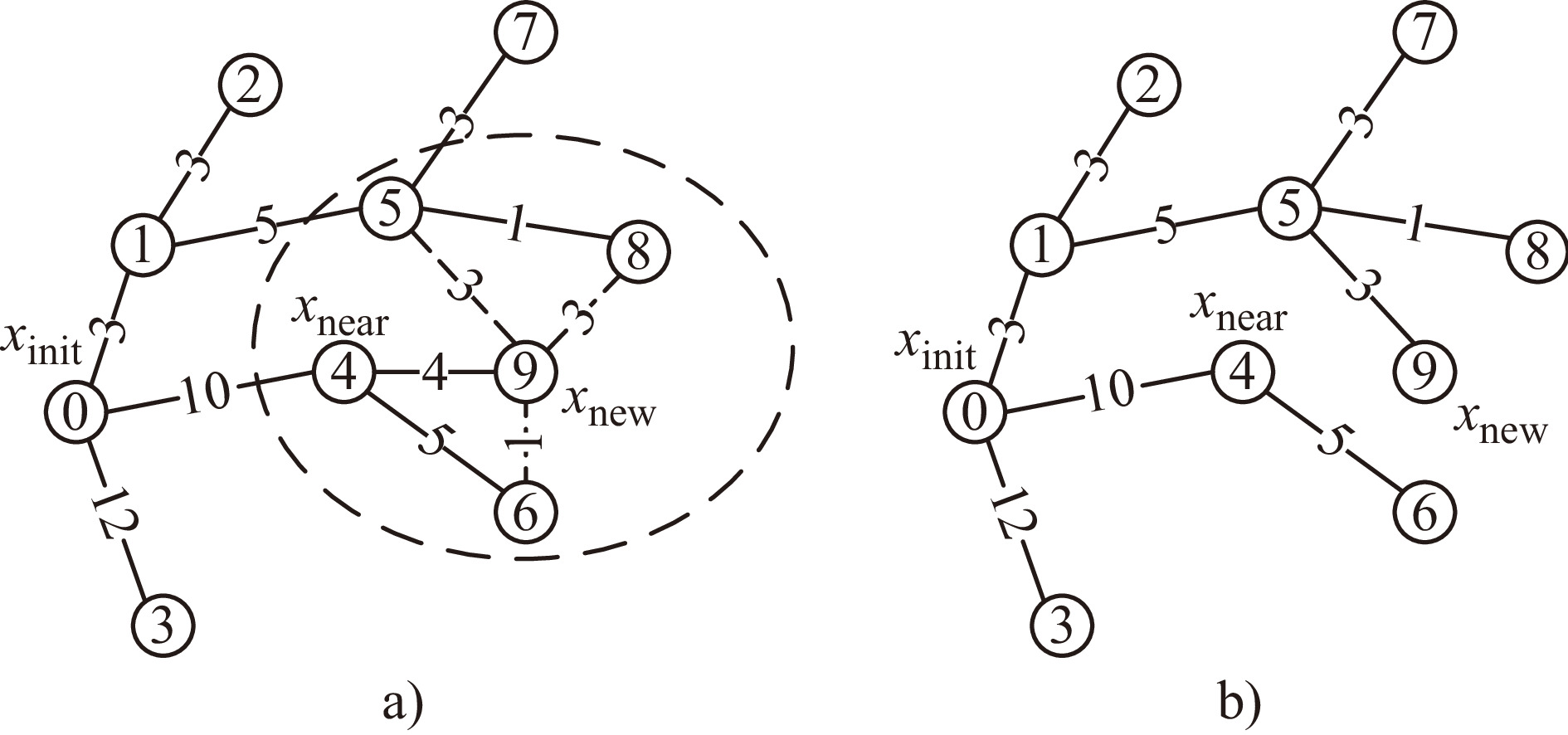
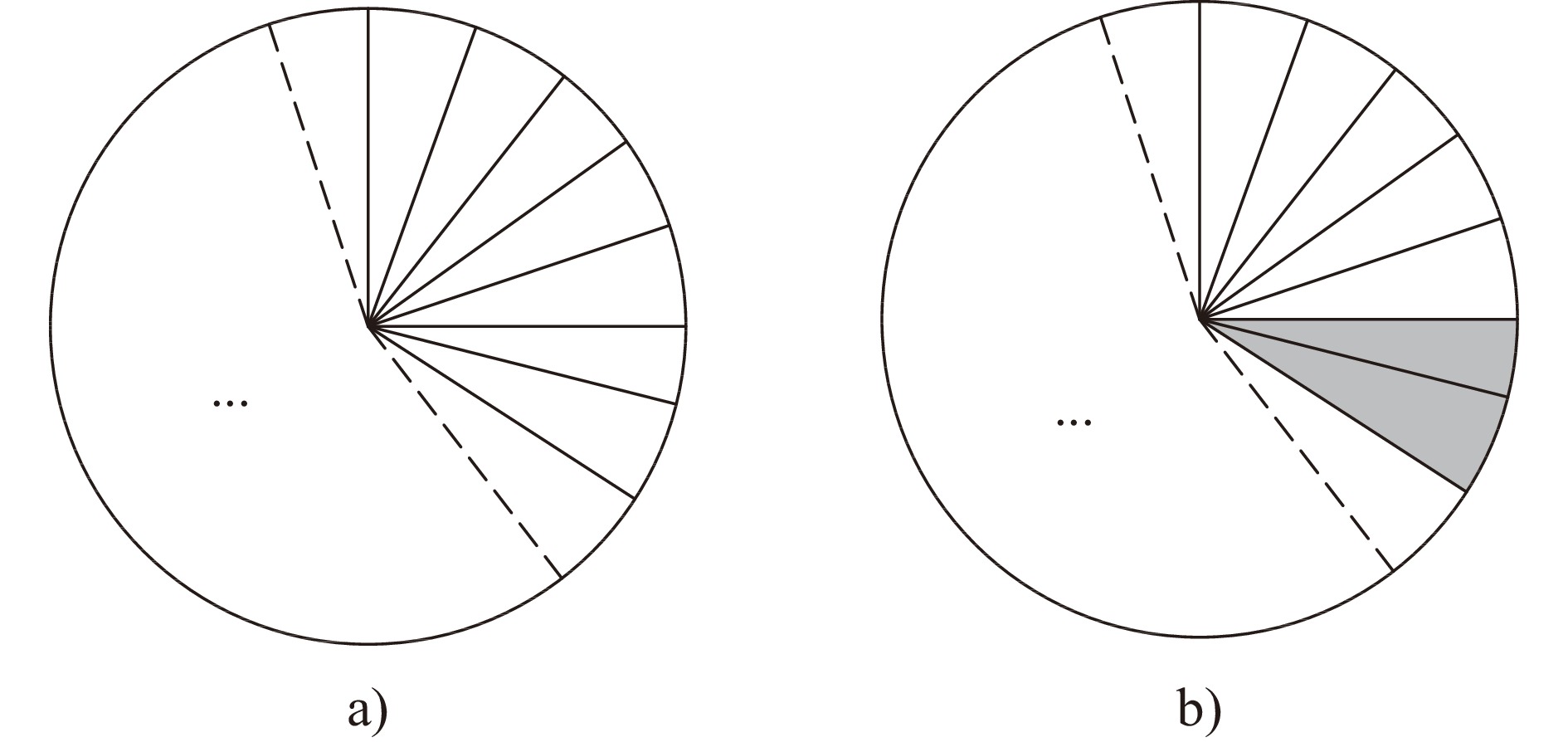
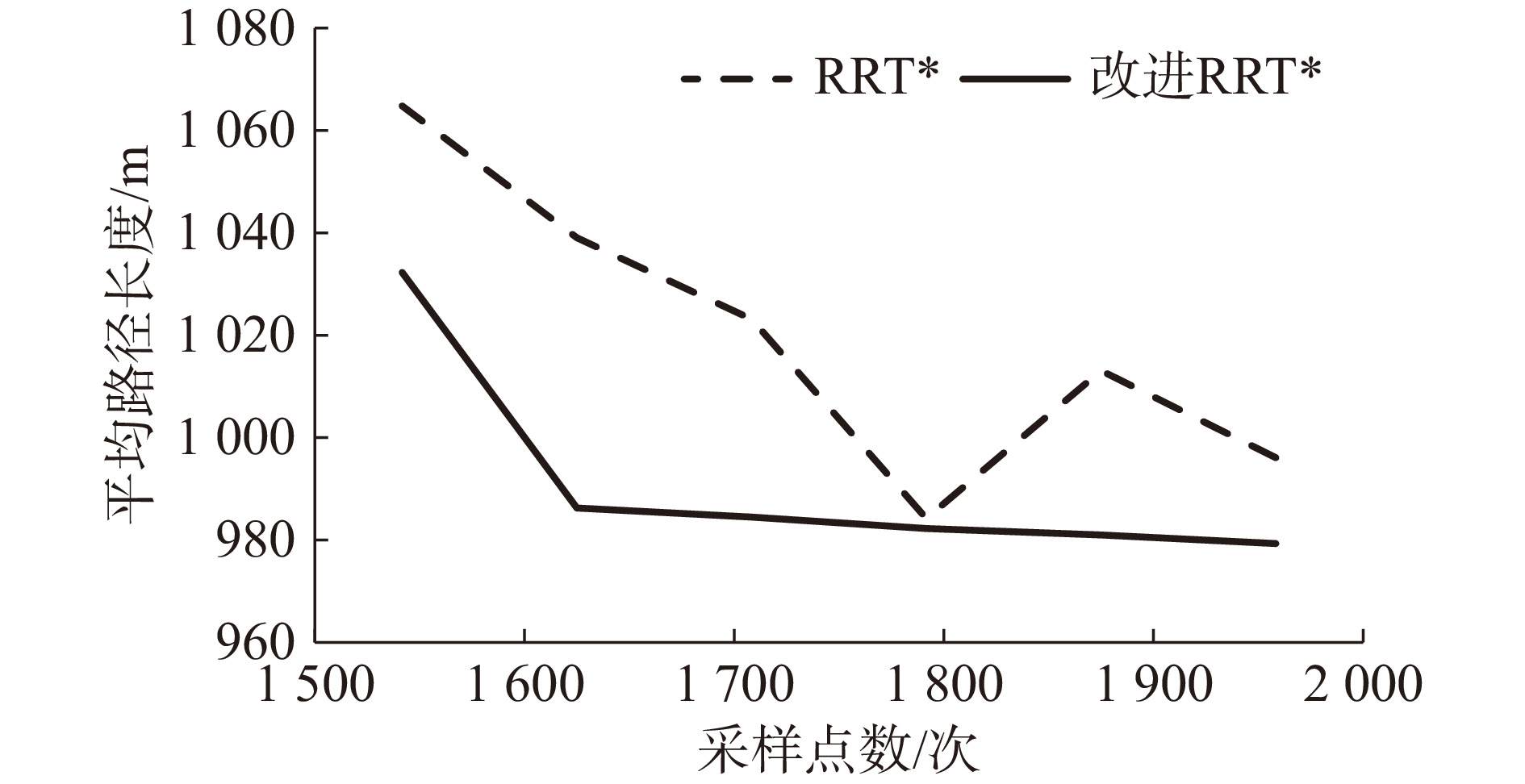
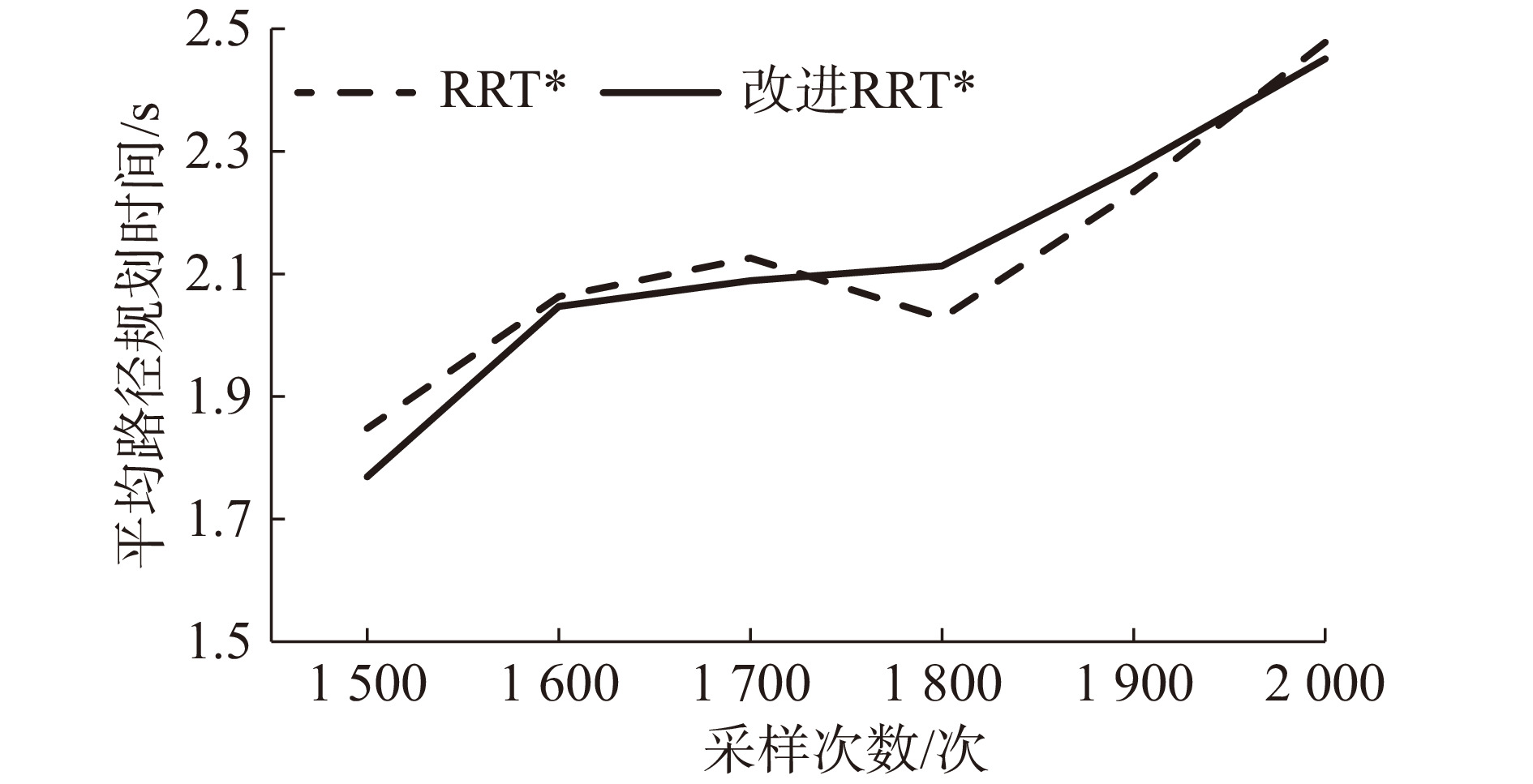
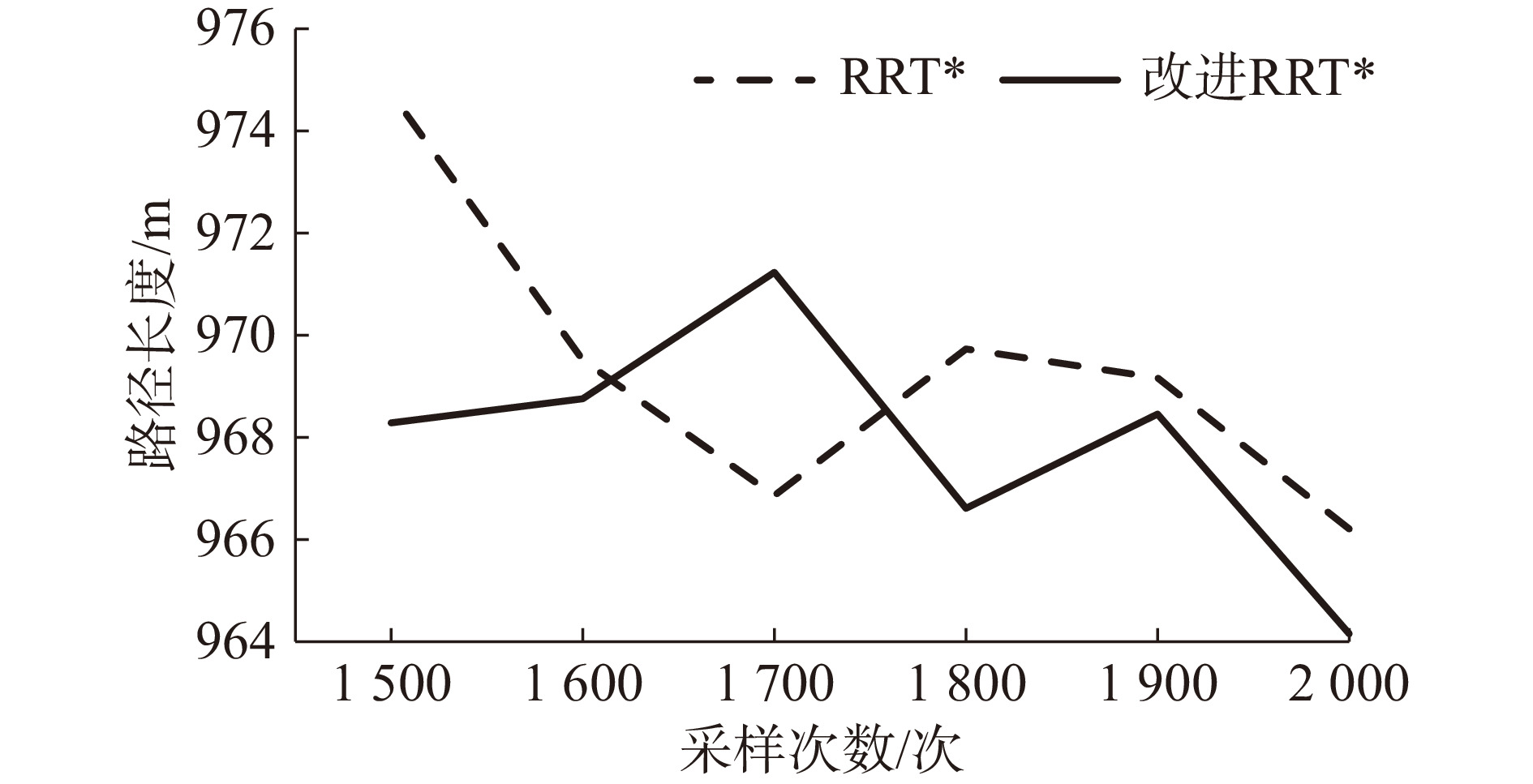
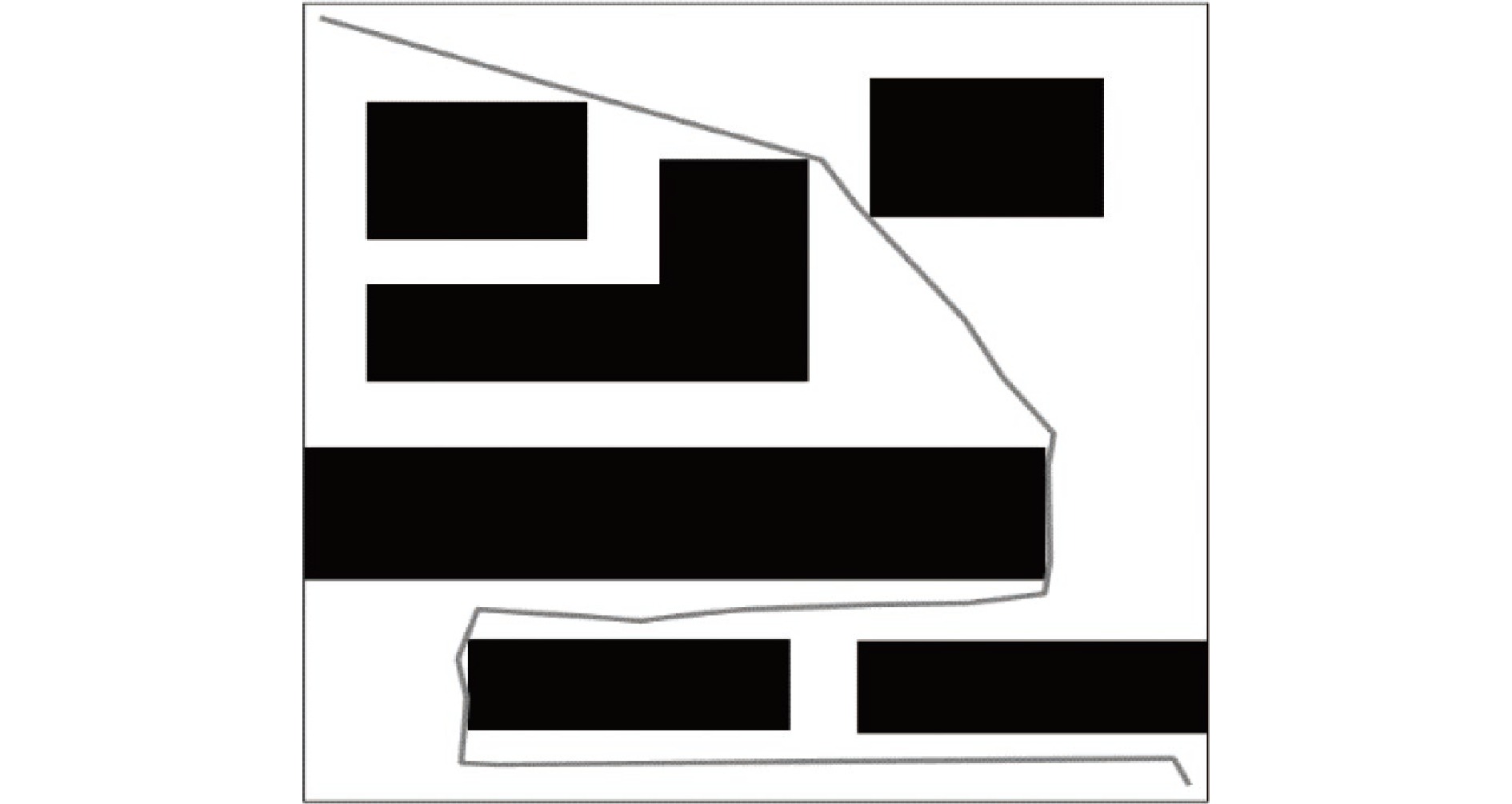
In view of the slow convergence rate of RRT* algorithm, a new RRT* path planning algorithm of uniform Logistic chaotic sequence sampling is proposed in this paper. The method uses uniformly distributed Logistic chaotic sequence instead of random numbers in the traditional RRT* algorithm, which ensures the randomness and ergodicity of sampling points. The algorithm improves the probability of passing through the obstacle area, and also accelerates the efficiency of random tree rerouting. Finally, it is proved by simulation and experiment that new RRT* algorithm based on uniformly distributed Logistic chaotic sequence sampling has fewer sampling points、shorter path planning time and good stability than traditional RRT* algorithm.
In view of the slow convergence rate of RRT* algorithm, a new RRT* path planning algorithm of uniform Logistic chaotic sequence sampling is proposed in this paper. The method uses uniformly distributed Logistic chaotic sequence instead of random numbers in the traditional RRT* algorithm, which ensures the randomness and ergodicity of sampling points. The algorithm improves the probability of passing through the obstacle area, and also accelerates the efficiency of random tree rerouting. Finally, it is proved by simulation and experiment that new RRT* algorithm based on uniformly distributed Logistic chaotic sequence sampling has fewer sampling points、shorter path planning time and good stability than traditional RRT* algorithm.














2022, 41(4): 619-625.
doi: 10.13433/j.cnki.1003-8728.20200387
Abstract:
Fatigue performance of the motorcycle frame determines the maximum service life that a motorcycle can achieve and affects the driving safety of the motorcycle. Based on this, a relatively complete virtual analysis process of motorcycle durability tests is investigated. After completing the acquisition of the load spectrum of the actual road, a multi-body dynamics model of the motorcycle is created and the load spectrum of the equivalent road is reproduced by virtual iteration. Finally, the fatigue simulation of the motorcycle frame is performed with quasi-static superposition method. The results show that the multi-body dynamics model of the motorcycle has high accuracy, the strength weak position of the frame is reasonably predicted, and the virtual durability analysis process of the motorcycle basically meets the needs of engineering applications
Fatigue performance of the motorcycle frame determines the maximum service life that a motorcycle can achieve and affects the driving safety of the motorcycle. Based on this, a relatively complete virtual analysis process of motorcycle durability tests is investigated. After completing the acquisition of the load spectrum of the actual road, a multi-body dynamics model of the motorcycle is created and the load spectrum of the equivalent road is reproduced by virtual iteration. Finally, the fatigue simulation of the motorcycle frame is performed with quasi-static superposition method. The results show that the multi-body dynamics model of the motorcycle has high accuracy, the strength weak position of the frame is reasonably predicted, and the virtual durability analysis process of the motorcycle basically meets the needs of engineering applications













2022, 41(4): 626-633.
doi: 10.13433/j.cnki.1003-8728.20200379
Abstract:
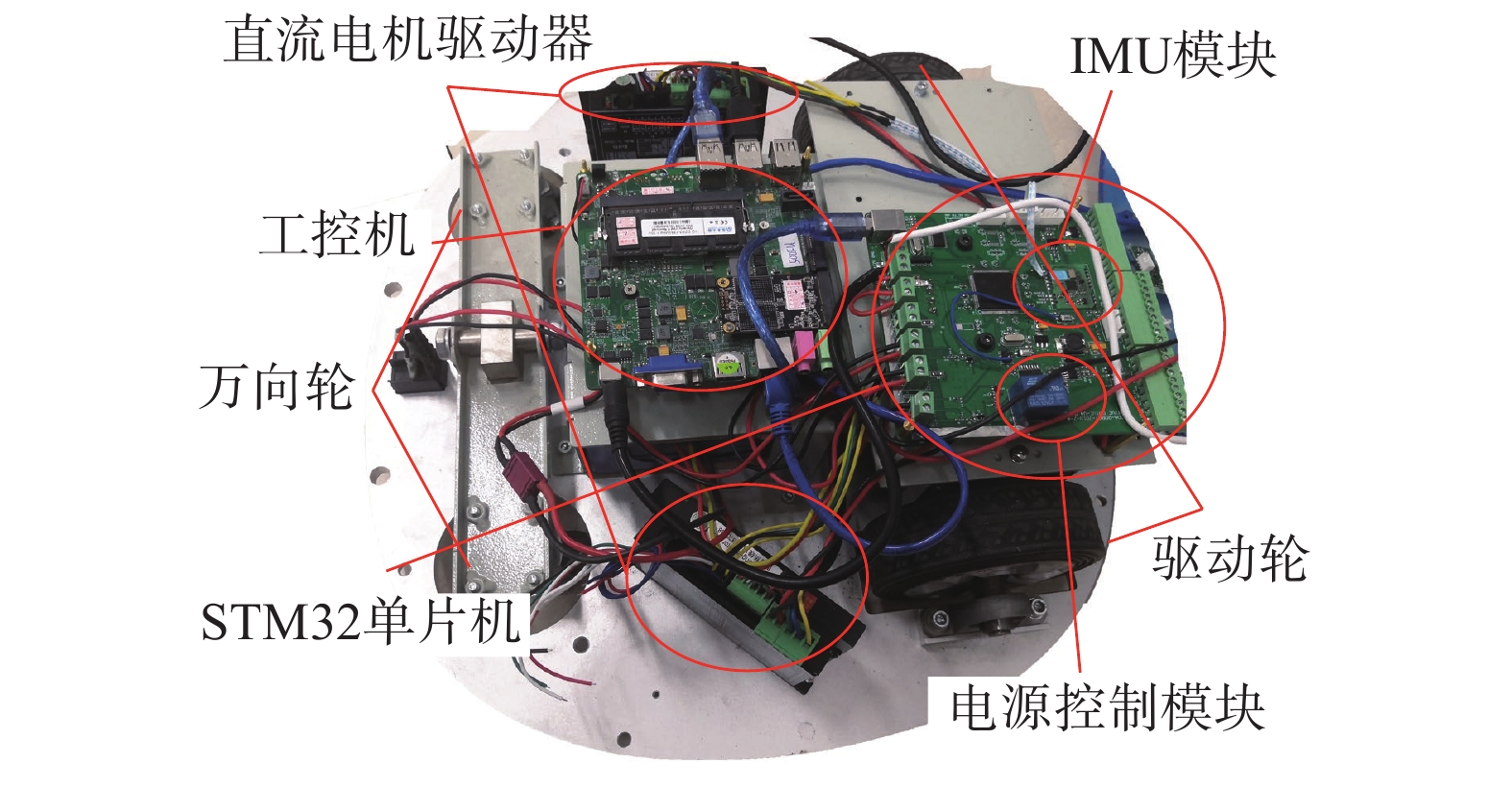
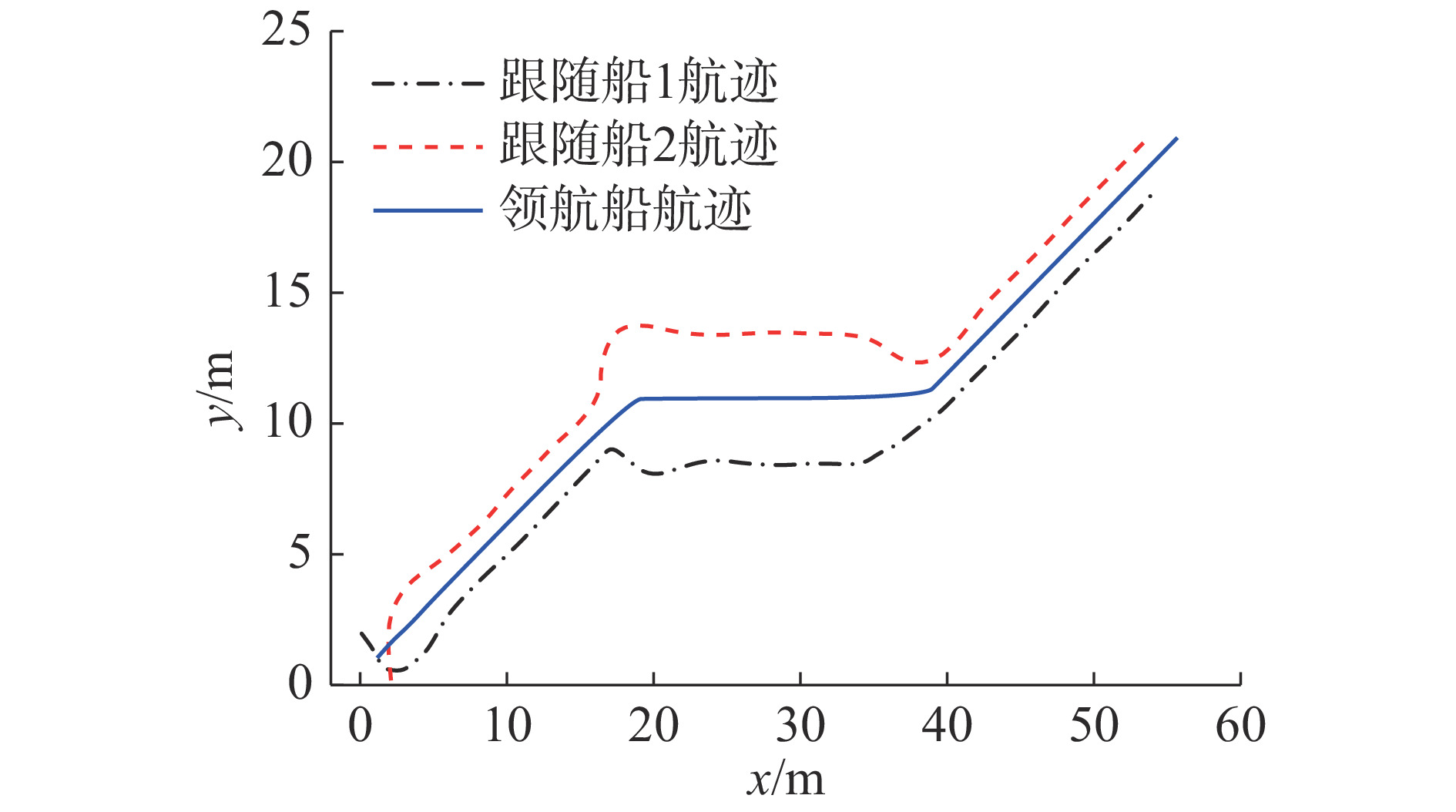
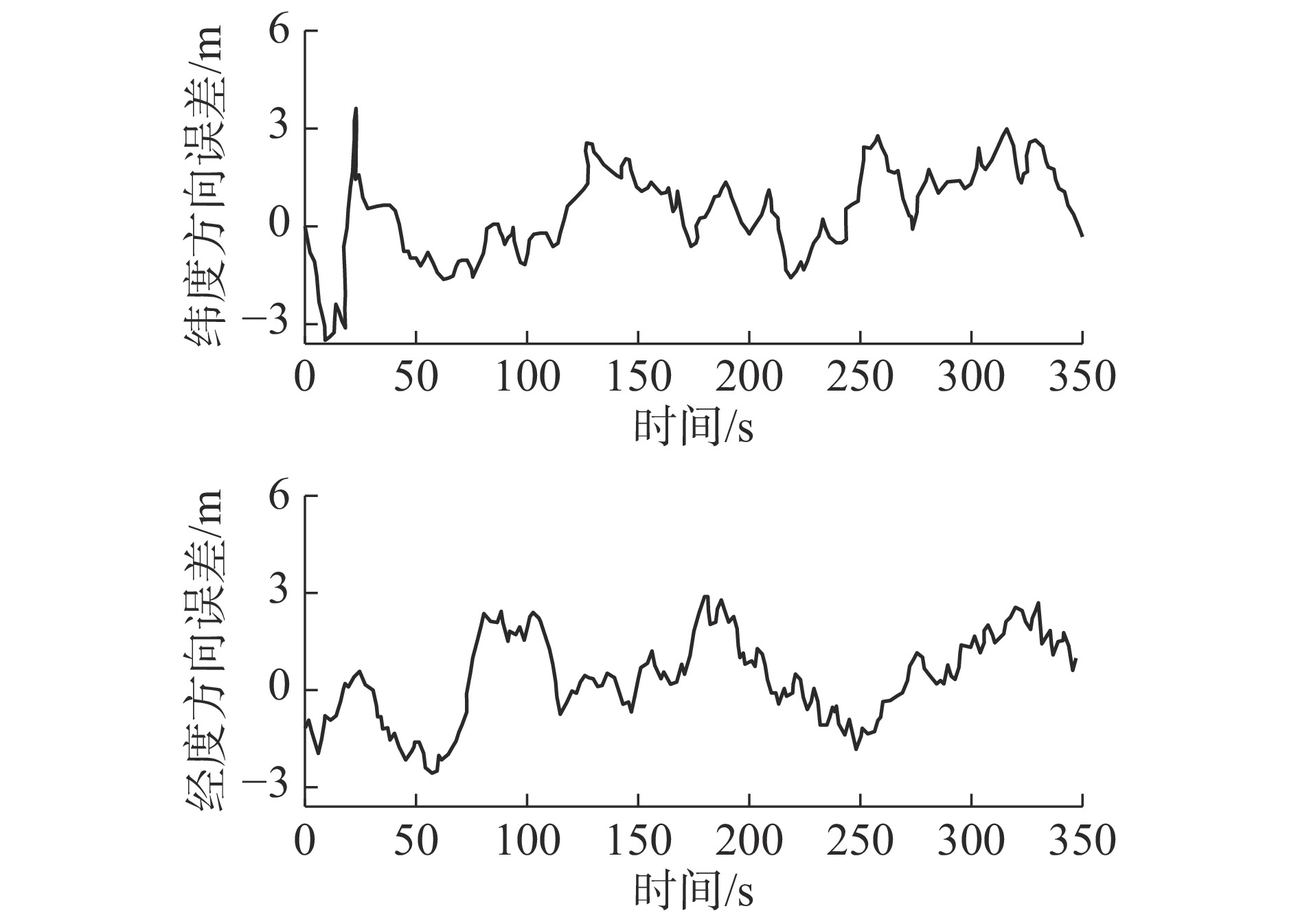
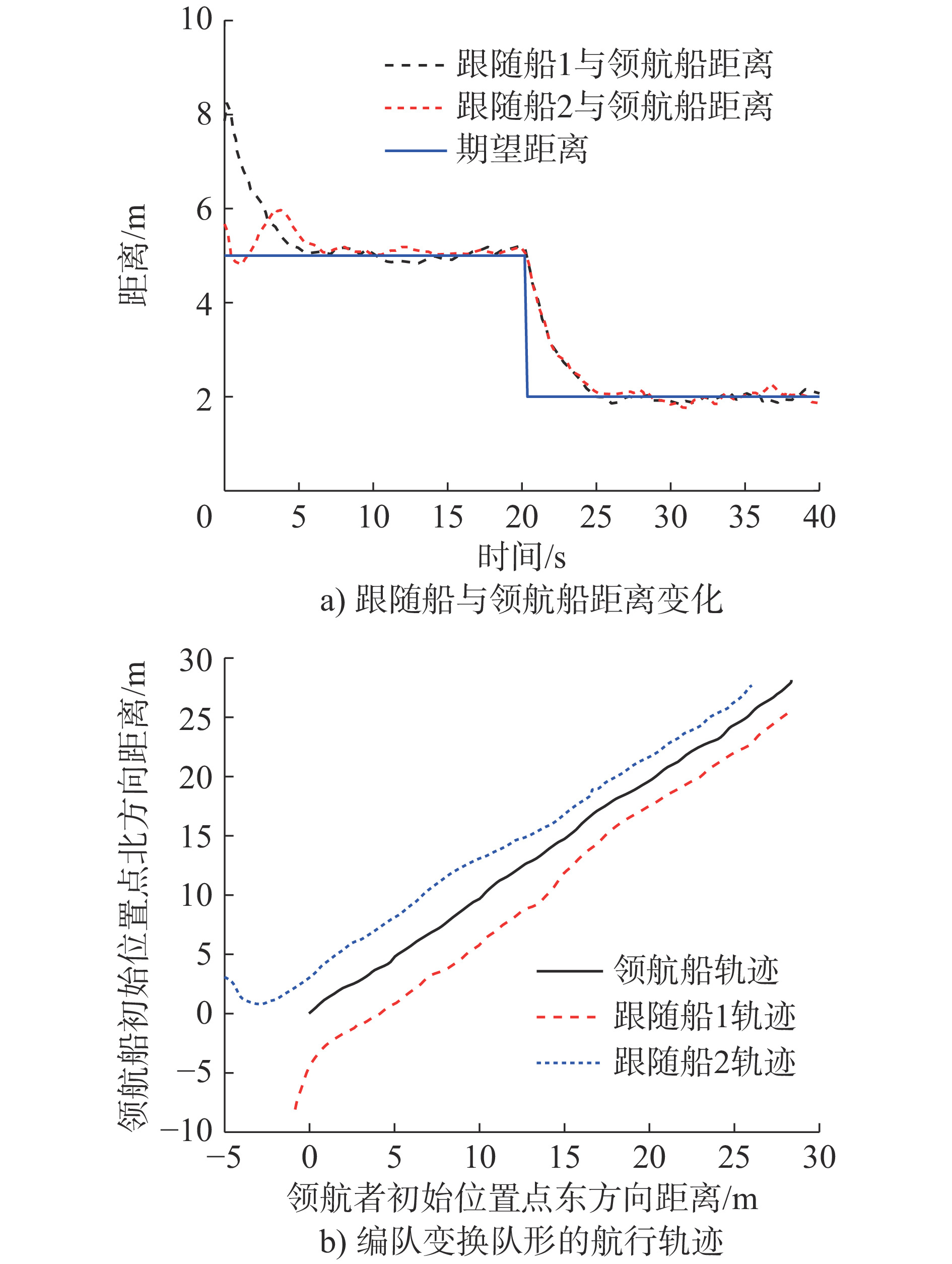
Because the formation of USVs(unmanned surface vehicles) is unstable due to the positioning accuracy, a leader-follower formation control strategy combined with the extended Kalman filteringstrategy is proposed to improve the positioning accuracy and form a stable formation. First, this paper builds a mathematical model of the unmanned surface vehicle and focuses on analyzing the formation model of multiple USVs based on the leader-followerformation control strategy. Then, the formation controller is designed according to the leader-follower formation control strategy. The stability of the USV is proved by using the Lyapunov function. For the position information required by the formation, the EKF (the extended Kalman filter) is used to fuse the data of GPS and IMU to improve the positioning accuracy. Finally, the simulationof USVformation and its transformation are carried out. The experimental data after introducing the EKF is analyzed. The simulation results show that the formation controller and the position estimation algorithm can effectively control the formation of stableUSVs. The formation can bereconstructed quickly and stably after transformation.
Because the formation of USVs(unmanned surface vehicles) is unstable due to the positioning accuracy, a leader-follower formation control strategy combined with the extended Kalman filteringstrategy is proposed to improve the positioning accuracy and form a stable formation. First, this paper builds a mathematical model of the unmanned surface vehicle and focuses on analyzing the formation model of multiple USVs based on the leader-followerformation control strategy. Then, the formation controller is designed according to the leader-follower formation control strategy. The stability of the USV is proved by using the Lyapunov function. For the position information required by the formation, the EKF (the extended Kalman filter) is used to fuse the data of GPS and IMU to improve the positioning accuracy. Finally, the simulationof USVformation and its transformation are carried out. The experimental data after introducing the EKF is analyzed. The simulation results show that the formation controller and the position estimation algorithm can effectively control the formation of stableUSVs. The formation can bereconstructed quickly and stably after transformation.










2022, 41(4): 634-638.
doi: 10.13433/j.cnki.1003-8728.20200523
Abstract:
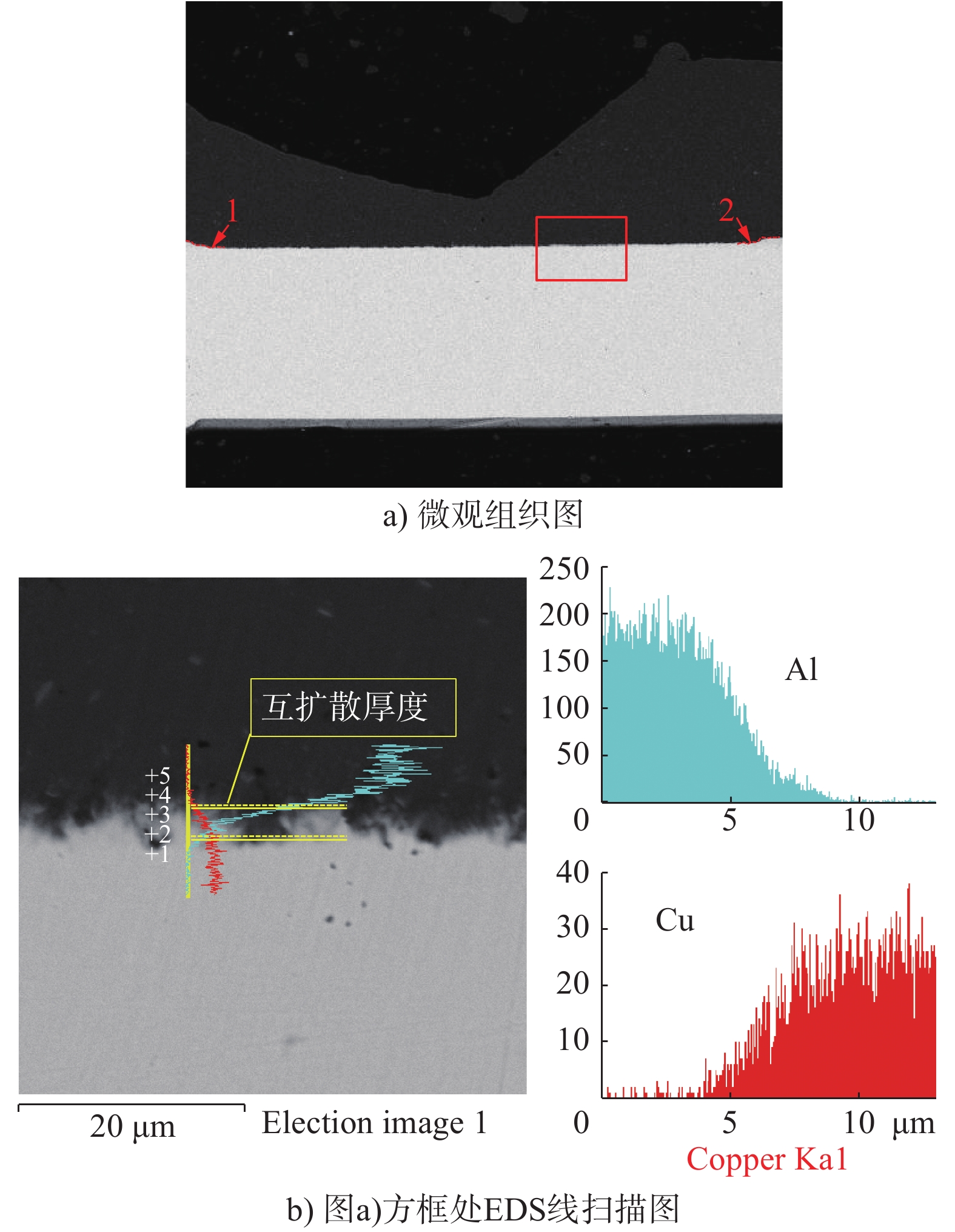
To improve the properties of the ultrasonic welded joints of copper (Cu) and aluminum(Al), the orthogonal test method was used to design the ultrasonic welding experiment of 0.3 mm thick Cu/Al foil. The interface microstructure, composition, and fracture morphology of the welded joints were obtained under the optimal parameters were studied with the scanning electron microscope (SEM), energy dispersive spectrometer (EDS) and X-ray diffractometer (XRD), and the tensile force test of welded joints were carried out, and the interface junction mechanism and fracture mechanism were discussed. The results show that the optimal process parameters were obtained as welding time (T) was 900 ms, welding power (P) was 600 W, welding pressure (F) was 0.5 MPa, and amplitude (T) was 45 μm. Under the process parameters, the tensile force of welded joint reaches 527.49 N, the Cu/Al joint interface is tightly bonded and interdiffusion has occurred, resulting in about 4.5 μm thick intermetallic compound layer (IMCs). The strength of the joint interface junction is mainly determined by the diffusion of interface atoms and mechanical interlocking. The fracture mode of the welded joints is a ductile-brittle mixed fracture.
To improve the properties of the ultrasonic welded joints of copper (Cu) and aluminum(Al), the orthogonal test method was used to design the ultrasonic welding experiment of 0.3 mm thick Cu/Al foil. The interface microstructure, composition, and fracture morphology of the welded joints were obtained under the optimal parameters were studied with the scanning electron microscope (SEM), energy dispersive spectrometer (EDS) and X-ray diffractometer (XRD), and the tensile force test of welded joints were carried out, and the interface junction mechanism and fracture mechanism were discussed. The results show that the optimal process parameters were obtained as welding time (T) was 900 ms, welding power (P) was 600 W, welding pressure (F) was 0.5 MPa, and amplitude (T) was 45 μm. Under the process parameters, the tensile force of welded joint reaches 527.49 N, the Cu/Al joint interface is tightly bonded and interdiffusion has occurred, resulting in about 4.5 μm thick intermetallic compound layer (IMCs). The strength of the joint interface junction is mainly determined by the diffusion of interface atoms and mechanical interlocking. The fracture mode of the welded joints is a ductile-brittle mixed fracture.





2022, 41(4): 639-645.
doi: 10.13433/j.cnki.1003-8728.20200386
Abstract:
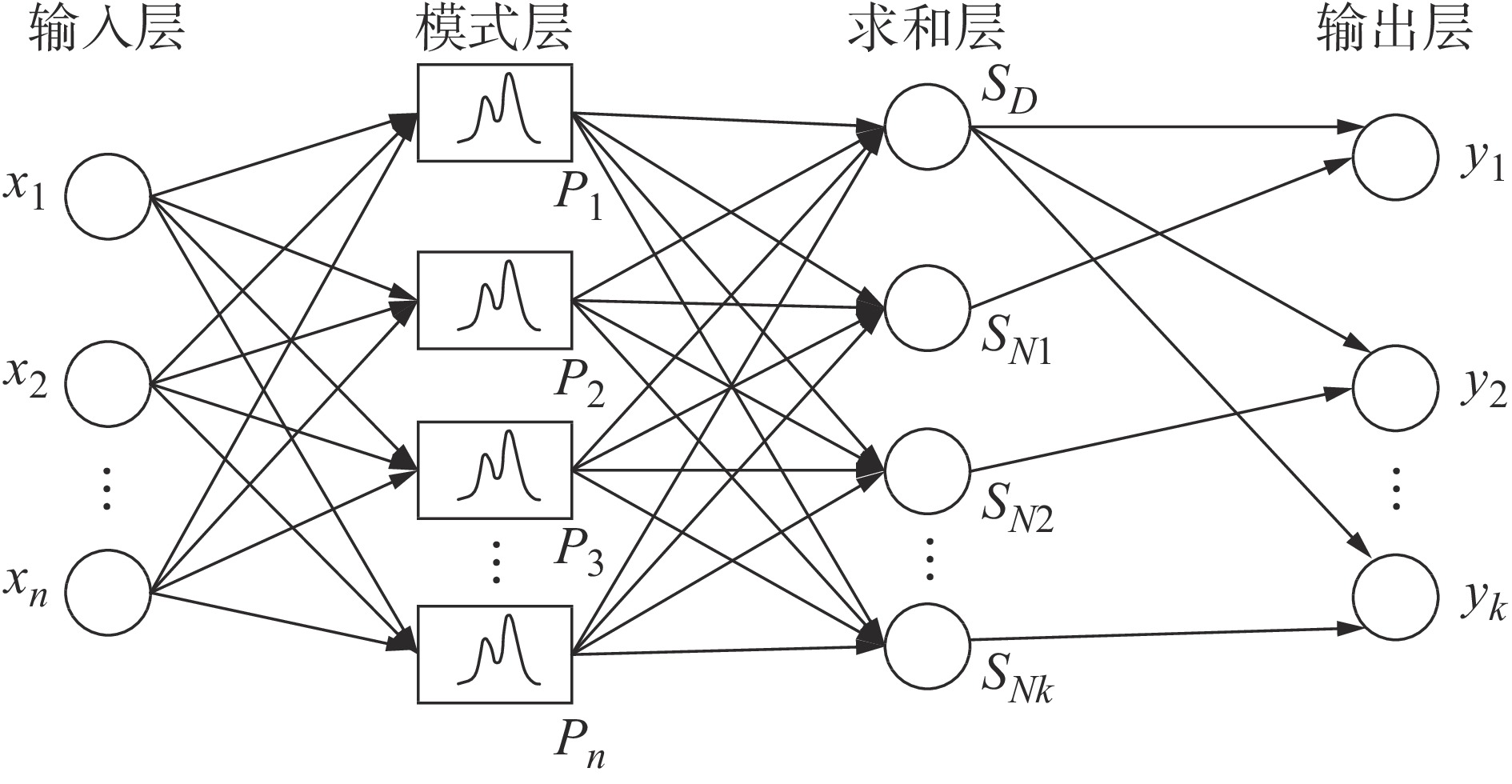
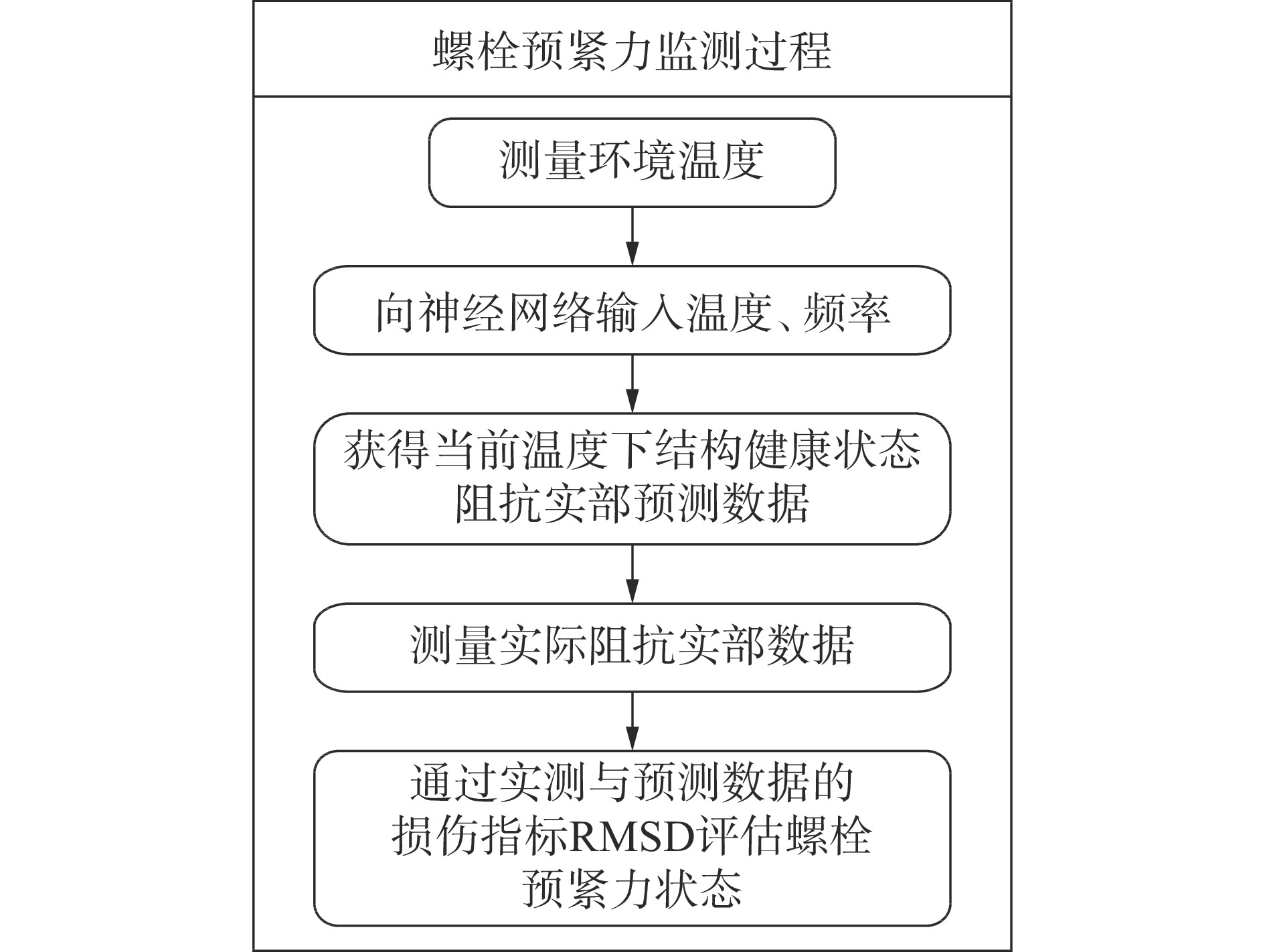
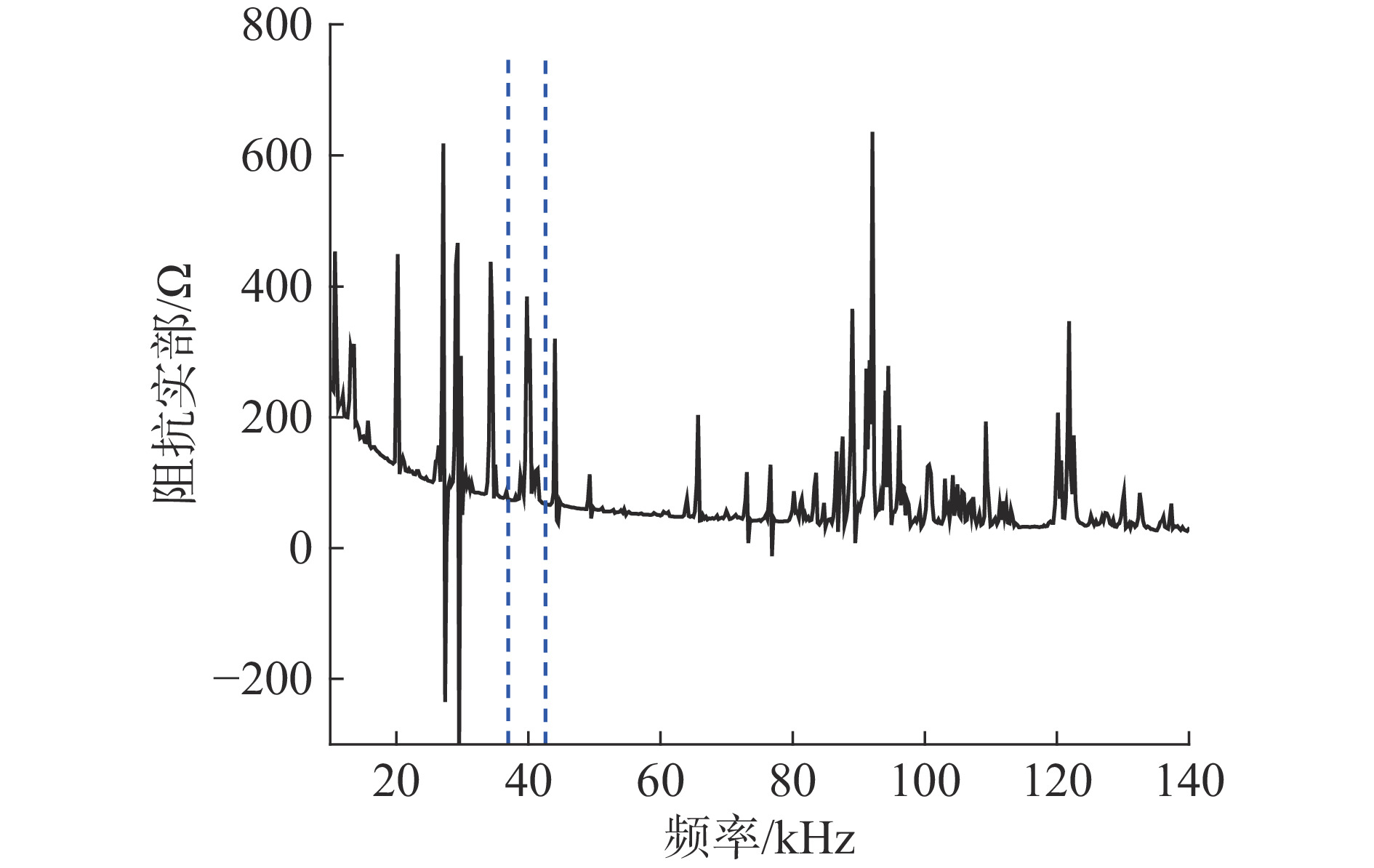
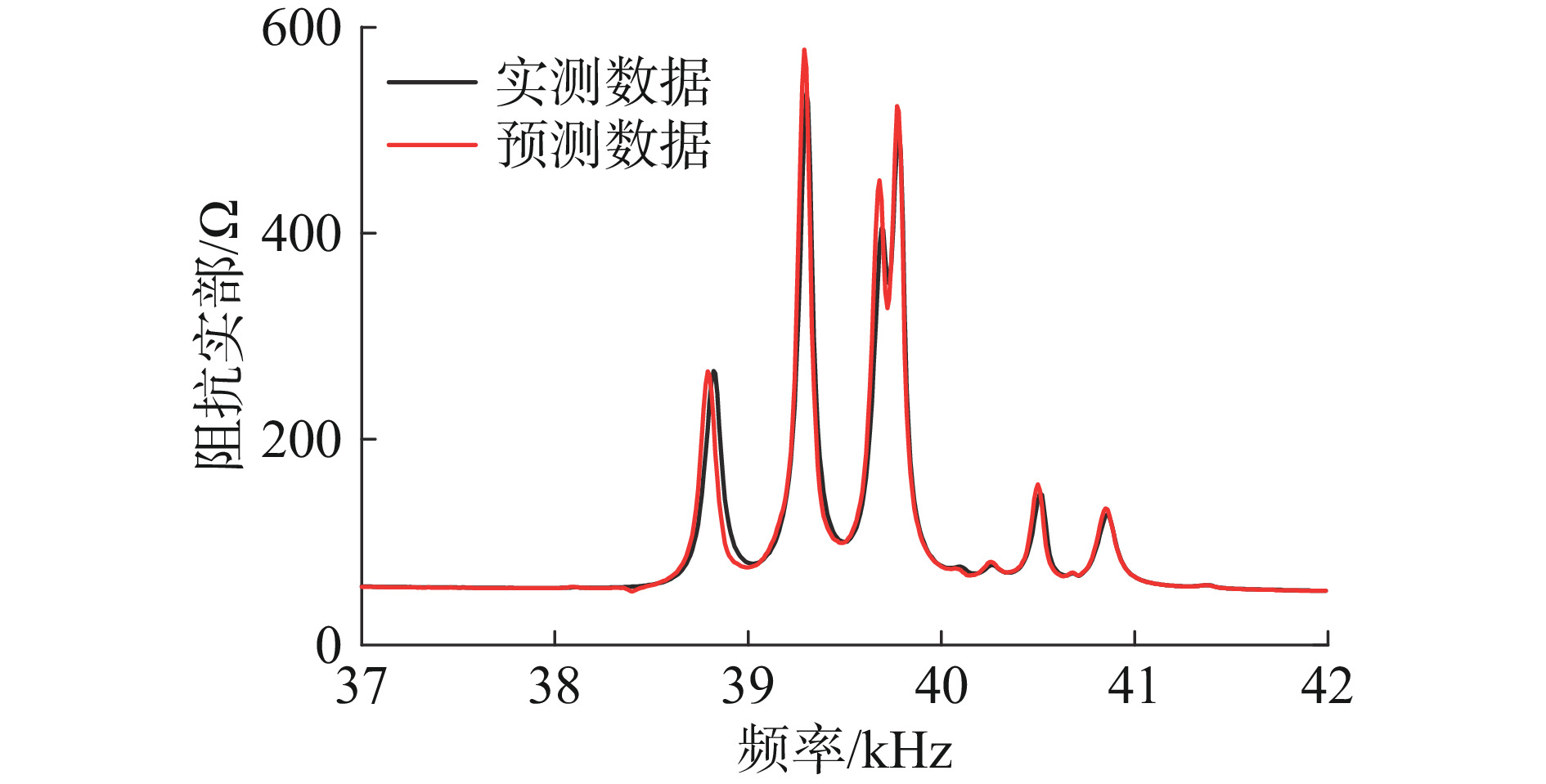
Bolted joints are widely used in engineering structures.In the long-term service, the bolt pre-tightening force is likely to decrease due to the complex loading. This decrease will in turn induces loose connection failure. Piezoelectric impedance method is an effective method to detect the change of local bolt pre-tightening force quantitatively. However, the measured impedance also changes with temperature significantly, which brings great difficulty to the bolt pre-tightening monitoring. Hence, the temperature compensation in the bolt monitoringis necessary. In recent years, the machine learning methods have been received extensive attention. Therefore, the general regression neural network (GRNN) to compensate the temperature effect on the impedanceis proposed. Then the quantitative monitoring of bolt pre-tightening force at different temperatures was achieved. In this method, a small amount of data from different temperature was used to train a GRNN, and then impedance at any temperature can be predicted with GRNN. Furthermore, the predicted impedance is used as the benchmark to calculate the pre-tightening force indicator. Finally, the efficiency and accuracy of the present method are validated by the experimental results and common effective frequency shift method, respectively.
Bolted joints are widely used in engineering structures.In the long-term service, the bolt pre-tightening force is likely to decrease due to the complex loading. This decrease will in turn induces loose connection failure. Piezoelectric impedance method is an effective method to detect the change of local bolt pre-tightening force quantitatively. However, the measured impedance also changes with temperature significantly, which brings great difficulty to the bolt pre-tightening monitoring. Hence, the temperature compensation in the bolt monitoringis necessary. In recent years, the machine learning methods have been received extensive attention. Therefore, the general regression neural network (GRNN) to compensate the temperature effect on the impedanceis proposed. Then the quantitative monitoring of bolt pre-tightening force at different temperatures was achieved. In this method, a small amount of data from different temperature was used to train a GRNN, and then impedance at any temperature can be predicted with GRNN. Furthermore, the predicted impedance is used as the benchmark to calculate the pre-tightening force indicator. Finally, the efficiency and accuracy of the present method are validated by the experimental results and common effective frequency shift method, respectively.











2022, 41(4): 646-650.
doi: 10.13433/j.cnki.1003-8728.20200383
Abstract:
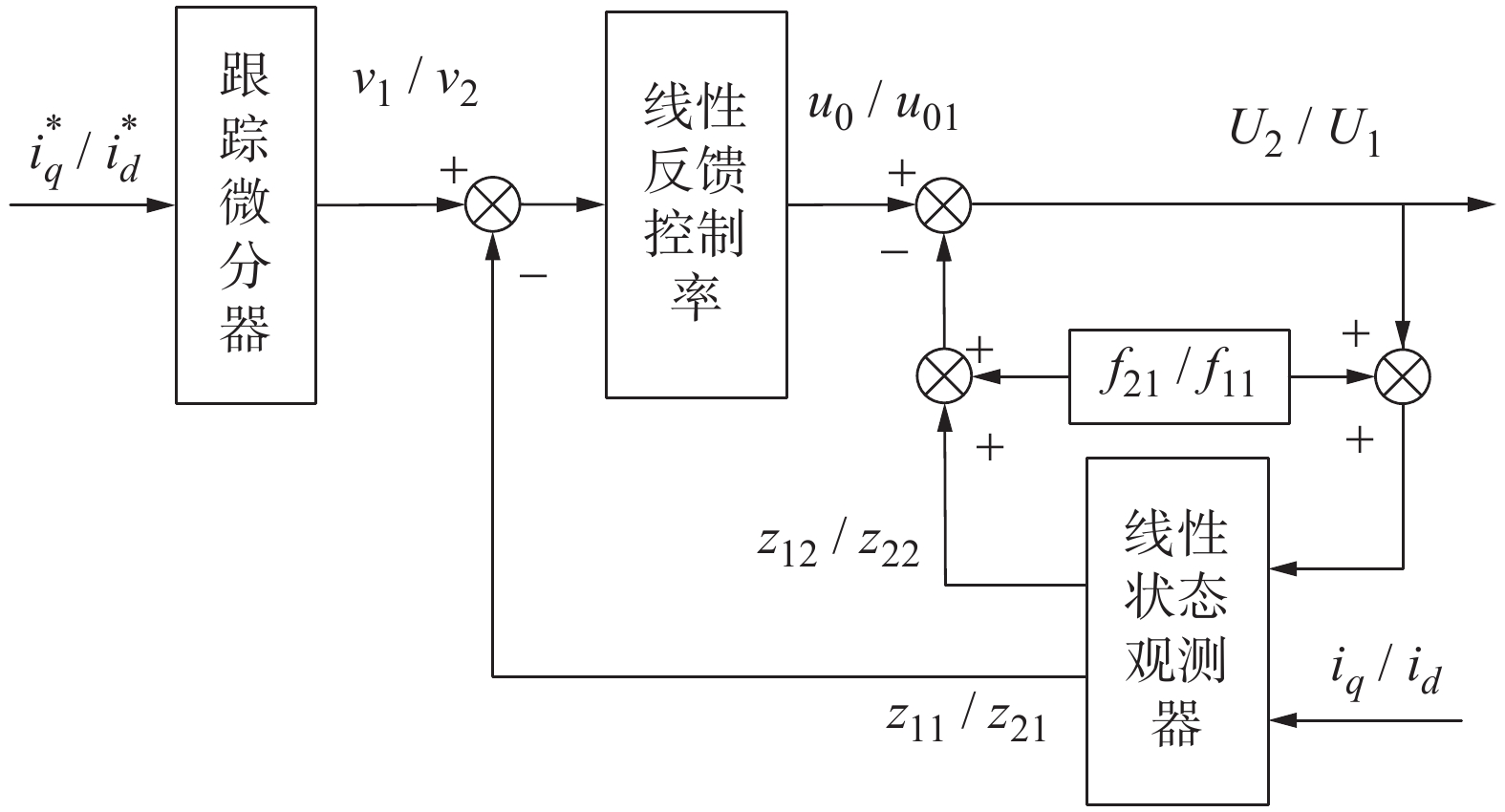
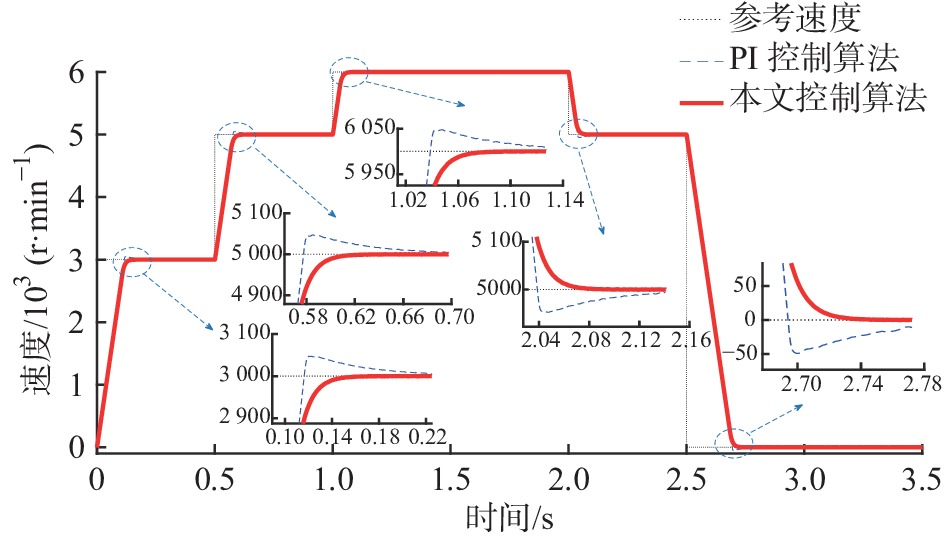
In order to solve the coupling problem of a permanent magnet synchronous motor (PMSM) and improve its anti-disturbance ability at high speed, an improved anti-disturbance decoupling technique is proposed in this paper. A virtual control variable is introduced into the current loop of the motor to realize the active disturbance decoupling control. In order to improve the observation accuracy of the disturbance observer, the disturbance observer of the current loop is improved by dividing the total disturbance into two parts, and the observer is only used to estimate the unknowndisturbances. The anti-disturbance controller is used in the speed loop, which can perform the disturbance compensation for load changes and improve the anti-disturbance ability. Simulation results show that the proposed control algorithm can improve the current decoupling performance, improve the speed regulation accuracy and anti-disturbance ability compared with the traditional proportional-integral (PI) feedforward decoupling control.
In order to solve the coupling problem of a permanent magnet synchronous motor (PMSM) and improve its anti-disturbance ability at high speed, an improved anti-disturbance decoupling technique is proposed in this paper. A virtual control variable is introduced into the current loop of the motor to realize the active disturbance decoupling control. In order to improve the observation accuracy of the disturbance observer, the disturbance observer of the current loop is improved by dividing the total disturbance into two parts, and the observer is only used to estimate the unknowndisturbances. The anti-disturbance controller is used in the speed loop, which can perform the disturbance compensation for load changes and improve the anti-disturbance ability. Simulation results show that the proposed control algorithm can improve the current decoupling performance, improve the speed regulation accuracy and anti-disturbance ability compared with the traditional proportional-integral (PI) feedforward decoupling control.



2022, 41(4): 651-656.
doi: 10.13433/j.cnki.1003-8728.20200394
Abstract:
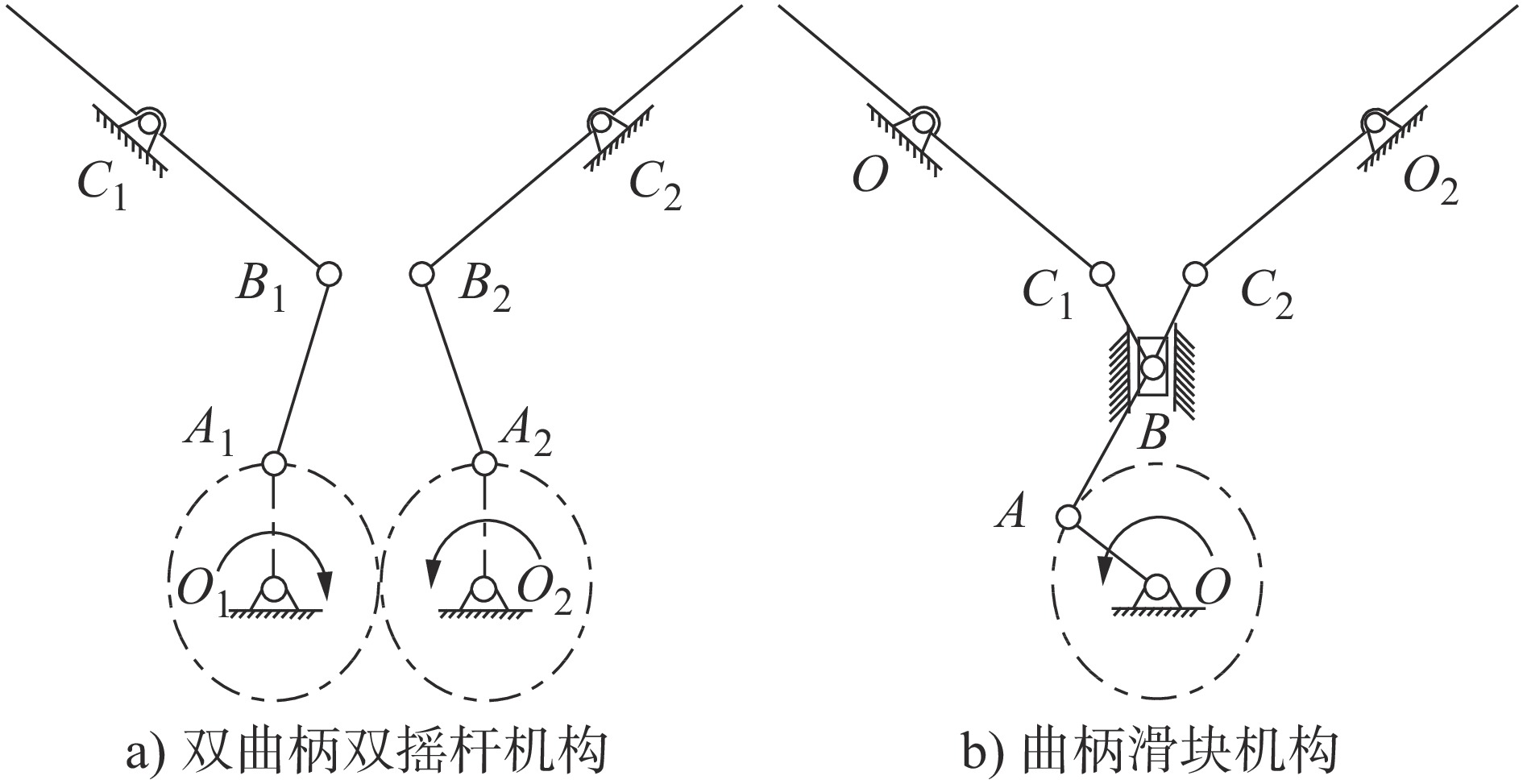
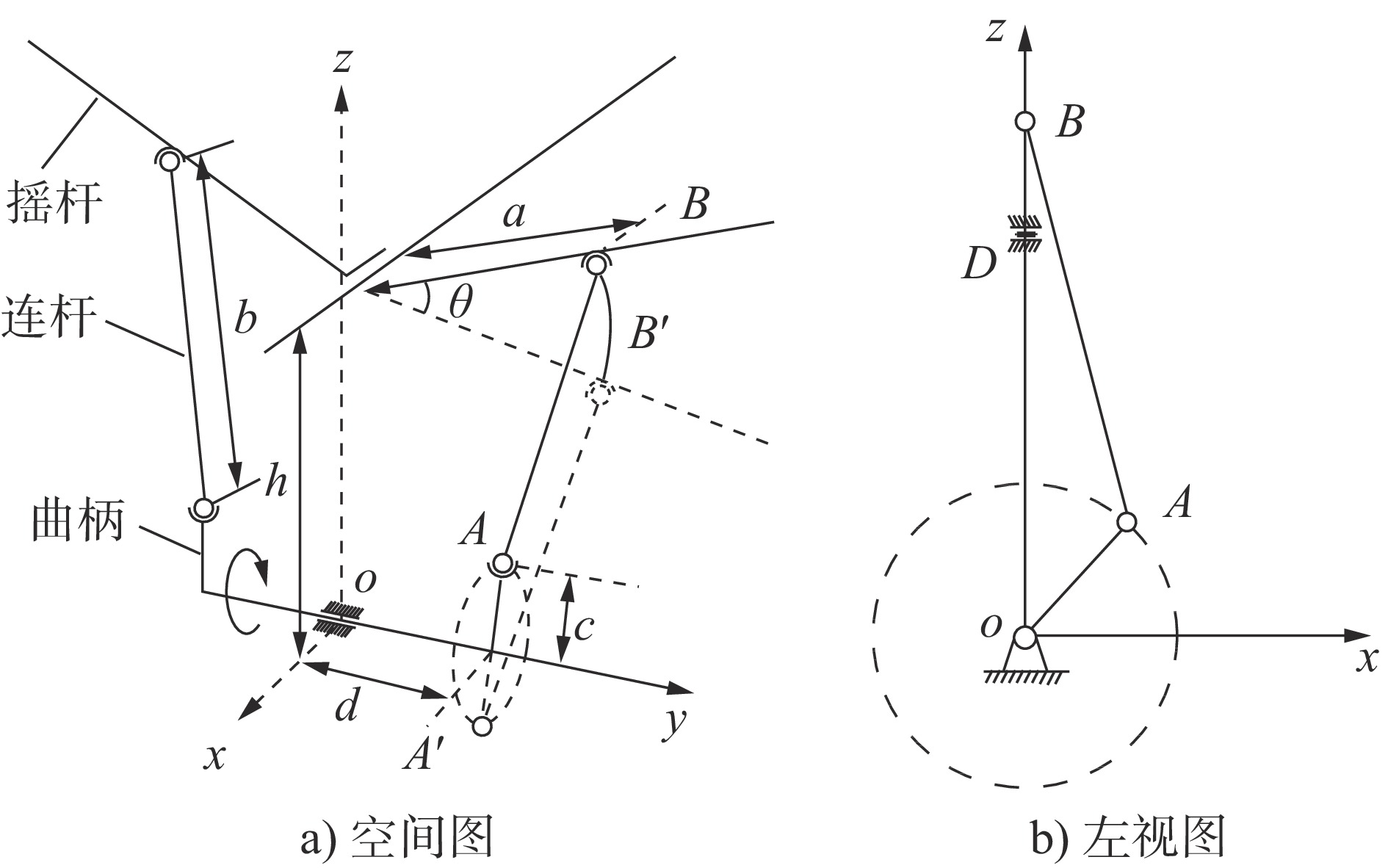
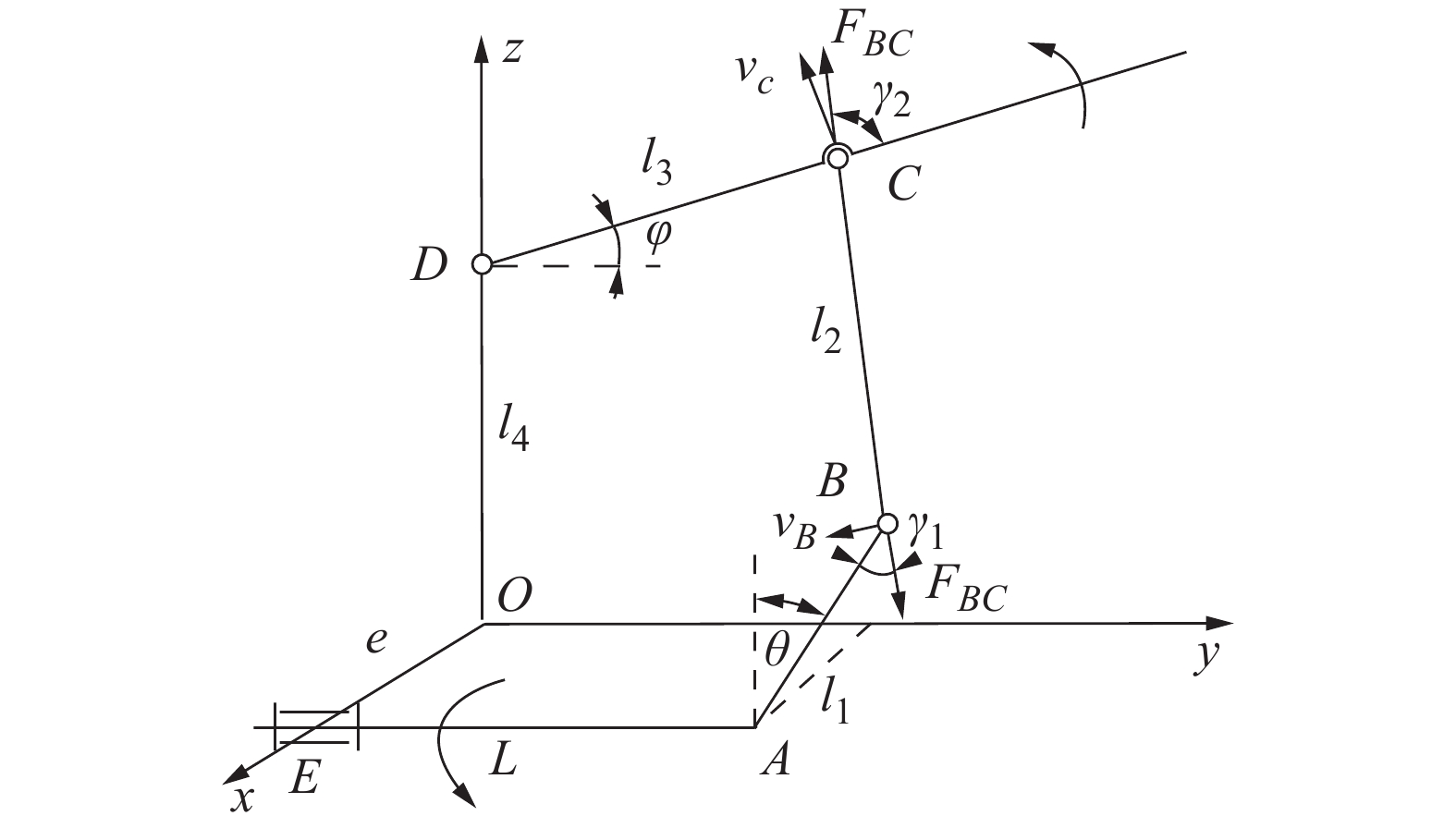
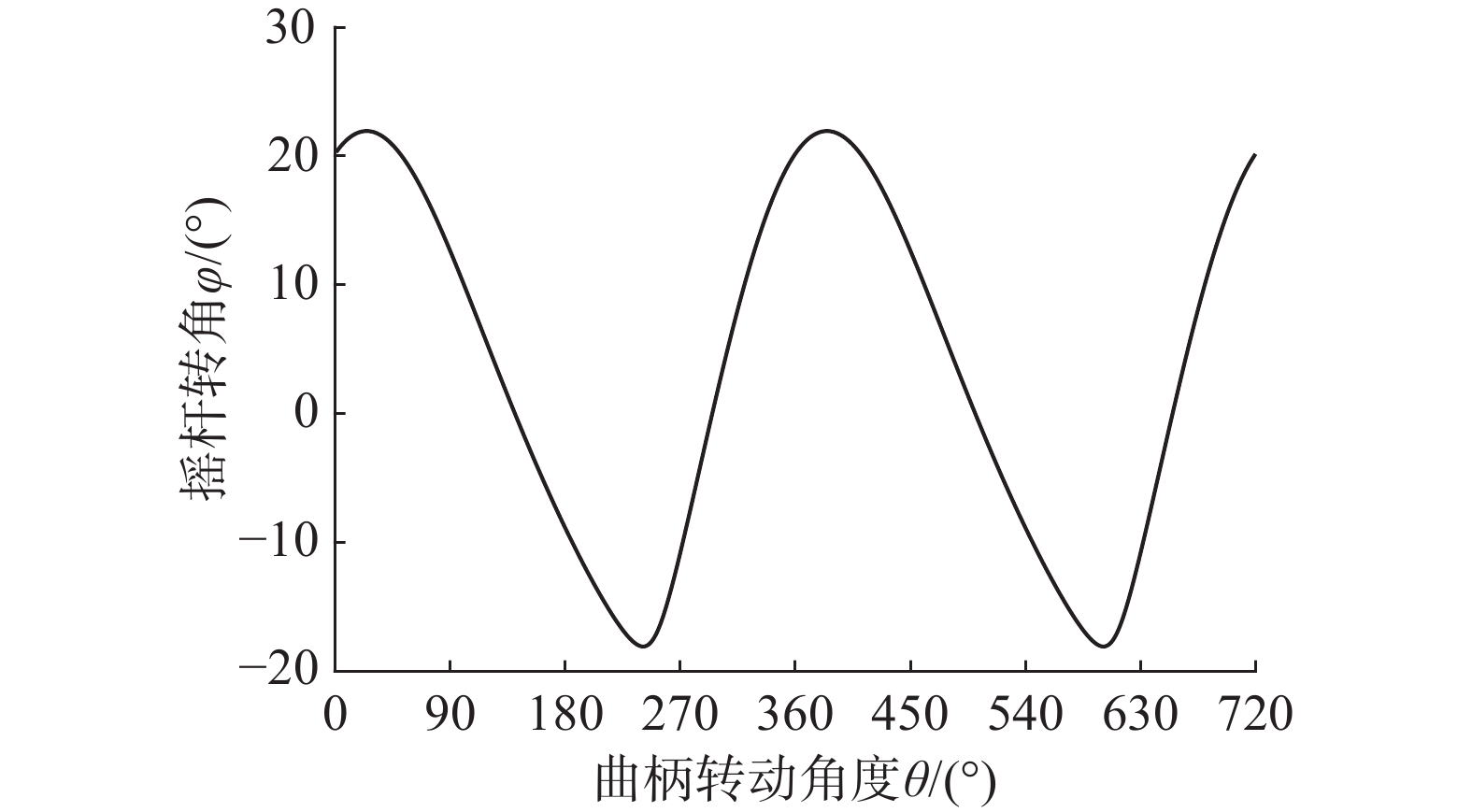
Based on the bias spatial RSSR four-bar mechanism, this paper designs a flapping wing mechanism with the characteristic of quick return, and establishes the kinematics model of the spatial RSSR four-bar mechanism through motion analysis. The optimal design model of the flapping wing mechanism is established by taking the motion angle and the pressure angle of the joint bearing as nonlinear constraints and the rocker swing angle and the stroke ratio coefficient as objective functions. Genetic algorithm is used to optimize the calculation of mechanism. Based on the relative rod length parameters of profit and flight obtained through optimization, a bionic flapping wing mechanism is designed with the crank length of 10 mm. The results show that the minimum transmission angle of the designed flapping wing mechanism, the maximum motion angle of the member at the joint bearing, the upper limit angle and the lower limit angle of flapping, and the travel speed ratio coefficient are consistent with the flight parameters of the bionic birds.
Based on the bias spatial RSSR four-bar mechanism, this paper designs a flapping wing mechanism with the characteristic of quick return, and establishes the kinematics model of the spatial RSSR four-bar mechanism through motion analysis. The optimal design model of the flapping wing mechanism is established by taking the motion angle and the pressure angle of the joint bearing as nonlinear constraints and the rocker swing angle and the stroke ratio coefficient as objective functions. Genetic algorithm is used to optimize the calculation of mechanism. Based on the relative rod length parameters of profit and flight obtained through optimization, a bionic flapping wing mechanism is designed with the crank length of 10 mm. The results show that the minimum transmission angle of the designed flapping wing mechanism, the maximum motion angle of the member at the joint bearing, the upper limit angle and the lower limit angle of flapping, and the travel speed ratio coefficient are consistent with the flight parameters of the bionic birds.