Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2022 Vol. 41, No. 1
Display Method:
2022, 41(1): 1-8.
doi: 10.13433/j.cnki.1003-8728.20200307
 PDF 3426KB
PDF 3426KB
Abstract:
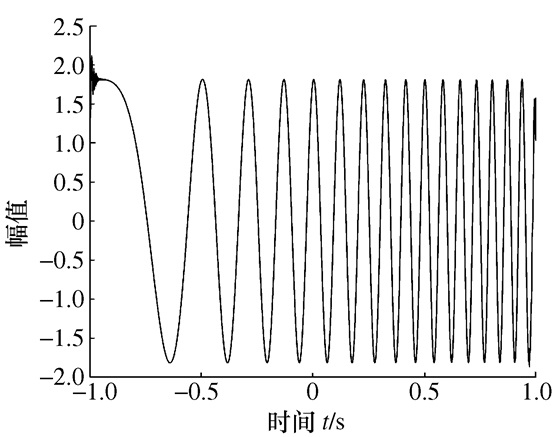
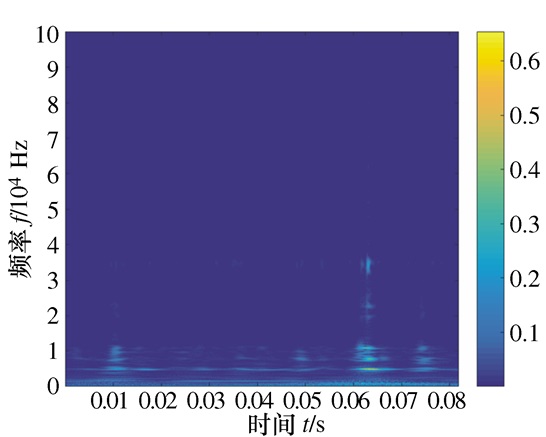
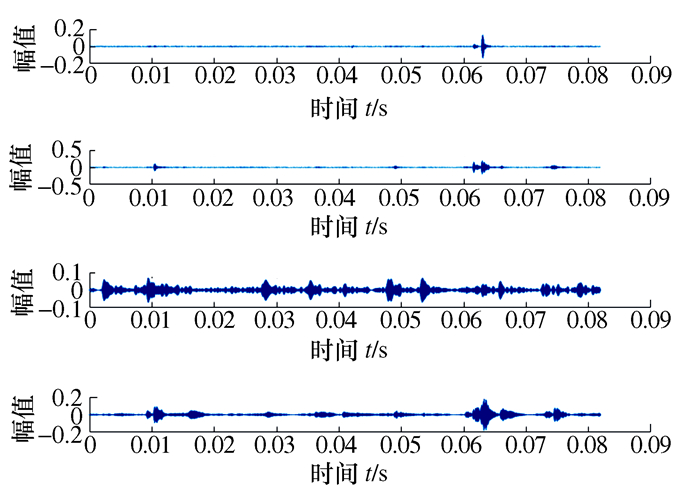
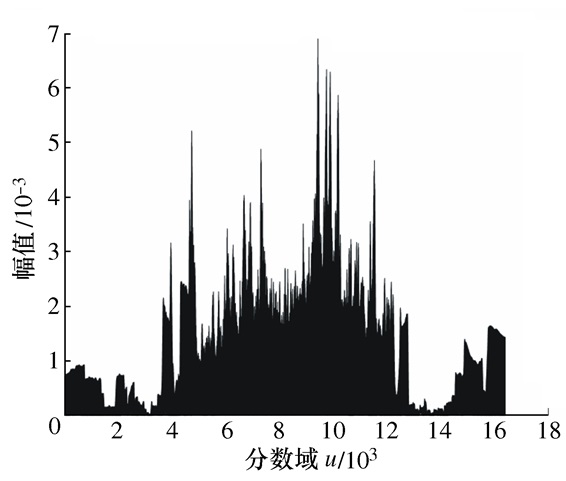
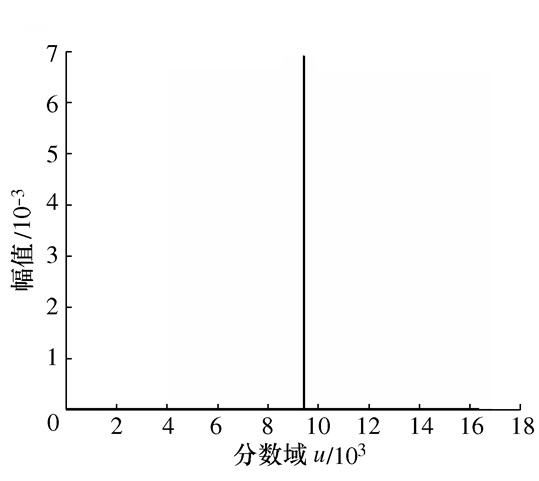
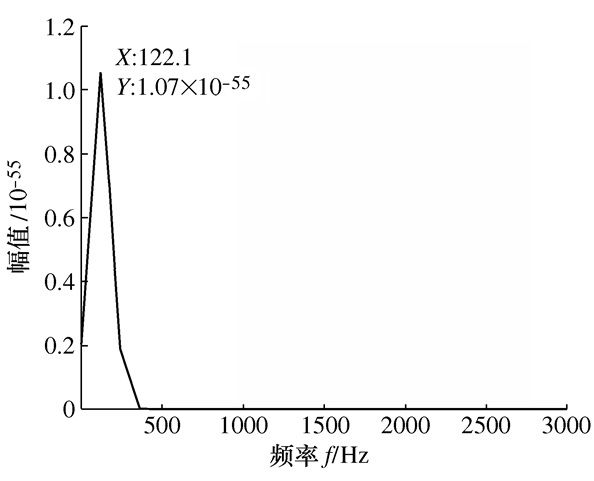
Rolling bearings are often used in rotating machinery such as wind turbines and engines. Due to factors such as load and current changes, rolling bearings in rotating equipment will operate under variable speed conditions. Under variable speed conditions, the existing fault diagnosis methods such as time-frequency analysis and resonance demodulation cannot effectively extract fault features, and considering the difficulty of extracting fault features in strong background noise, a variable operating condition fault feature extraction method based on generalized variational mode decomposition (GVMD) and fractional Fourier transform (FRFT) is proposed in this paper. First, the original vibration signal with a non-linear distribution of fault characteristic frequencies under variable operating conditions is generalizedly demodulated to an approximate linear distribution; and then the demodulated signal is subjected to variational mode decomposition (VMD) to obtain several components of the intrinsic mode functions (IMF), the optimal component is selected according to the correlation coefficient criterion for filtering in the fractional order domain; finally, the characteristic frequency of the fault is extracted by analyzing the 1.5 dimensional envelope spectrum of the filtered signal. The results of applying this method to rolling bearing simulation data and actual test data show that this method can effectively extract the fault characteristic frequency of rolling bearings under variable operating conditions.
Rolling bearings are often used in rotating machinery such as wind turbines and engines. Due to factors such as load and current changes, rolling bearings in rotating equipment will operate under variable speed conditions. Under variable speed conditions, the existing fault diagnosis methods such as time-frequency analysis and resonance demodulation cannot effectively extract fault features, and considering the difficulty of extracting fault features in strong background noise, a variable operating condition fault feature extraction method based on generalized variational mode decomposition (GVMD) and fractional Fourier transform (FRFT) is proposed in this paper. First, the original vibration signal with a non-linear distribution of fault characteristic frequencies under variable operating conditions is generalizedly demodulated to an approximate linear distribution; and then the demodulated signal is subjected to variational mode decomposition (VMD) to obtain several components of the intrinsic mode functions (IMF), the optimal component is selected according to the correlation coefficient criterion for filtering in the fractional order domain; finally, the characteristic frequency of the fault is extracted by analyzing the 1.5 dimensional envelope spectrum of the filtered signal. The results of applying this method to rolling bearing simulation data and actual test data show that this method can effectively extract the fault characteristic frequency of rolling bearings under variable operating conditions.












2022, 41(1): 9-15.
doi: 10.13433/j.cnki.1003-8728.20200335
Abstract:
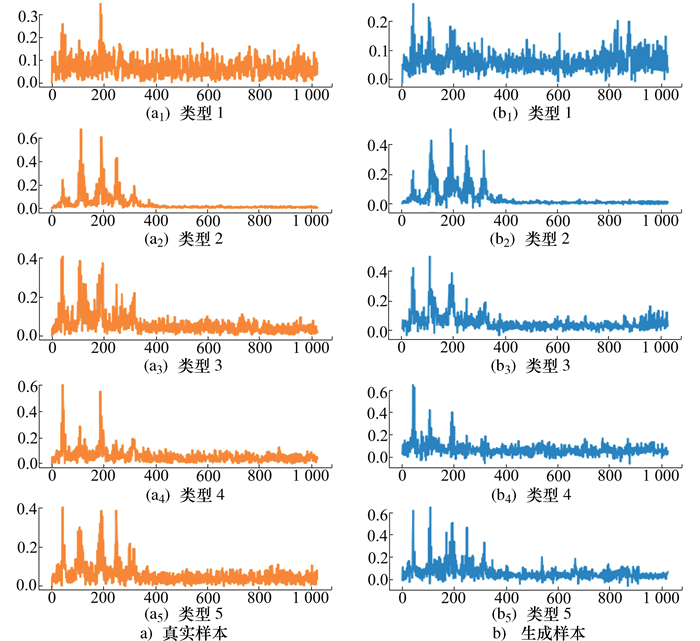
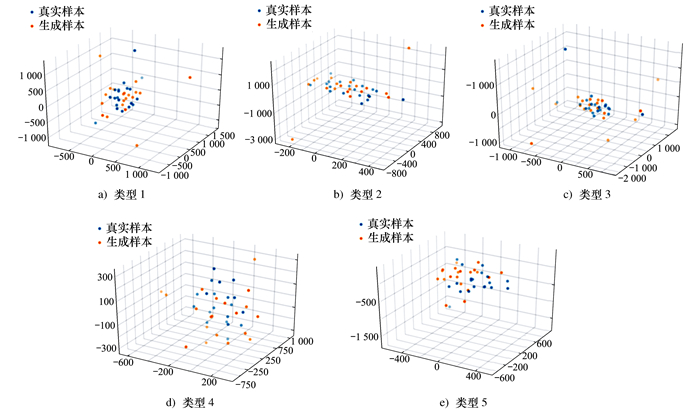
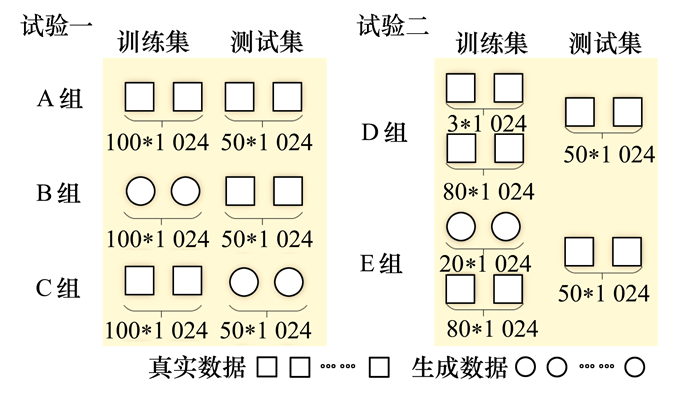
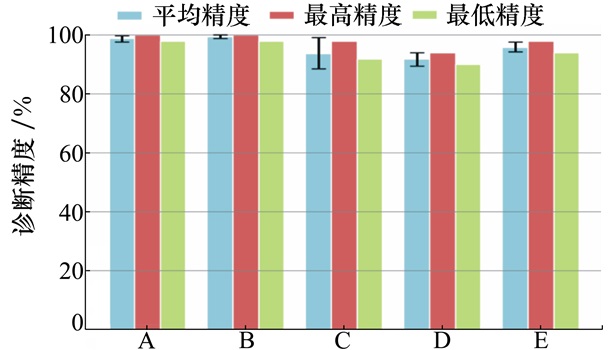
In actual operating conditions, the distribution of fault samples that can be collected by bearings often exhibits extremely strong imbalance characteristics, which has a non-negligible effect on the accuracy of fault diagnosis. In order to improve the accuracy of bearing fault diagnosis in the case of unbalanced samples, a new fault diagnosis method based on deep convolution generation adversarial network is proposed using the idea of sample generation and expansion. First of all, according to the characteristics of the bearing vibration data signal, the fast Fourier transform is used to convert the vibration signal into the frequency domain, and the preprocessing is performed through normalization. Secondly, the deep convolution generation confrontation network is used for confrontation training to generate virtual samples with real sample characteristics. The model uses an attenuated learning rate and adds a Dropout layer, which can improve the efficiency and authenticity of model generation. Finally, a one-dimensional convolution neural network model is constructed to complete the fault diagnosis. Experimental verification results show that the method proposed can effectively improve the diagnostic accuracy and diagnostic stability in the case of sample imbalance.
In actual operating conditions, the distribution of fault samples that can be collected by bearings often exhibits extremely strong imbalance characteristics, which has a non-negligible effect on the accuracy of fault diagnosis. In order to improve the accuracy of bearing fault diagnosis in the case of unbalanced samples, a new fault diagnosis method based on deep convolution generation adversarial network is proposed using the idea of sample generation and expansion. First of all, according to the characteristics of the bearing vibration data signal, the fast Fourier transform is used to convert the vibration signal into the frequency domain, and the preprocessing is performed through normalization. Secondly, the deep convolution generation confrontation network is used for confrontation training to generate virtual samples with real sample characteristics. The model uses an attenuated learning rate and adds a Dropout layer, which can improve the efficiency and authenticity of model generation. Finally, a one-dimensional convolution neural network model is constructed to complete the fault diagnosis. Experimental verification results show that the method proposed can effectively improve the diagnostic accuracy and diagnostic stability in the case of sample imbalance.







2022, 41(1): 16-24.
doi: 10.13433/j.cnki.1003-8728.20200327
Abstract:
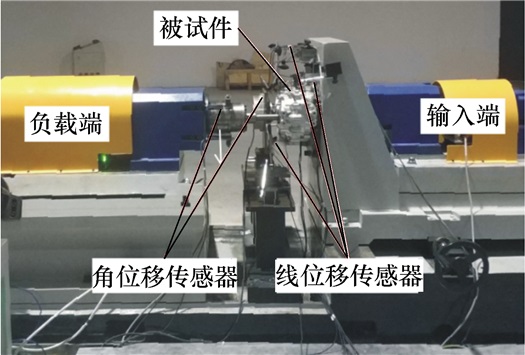
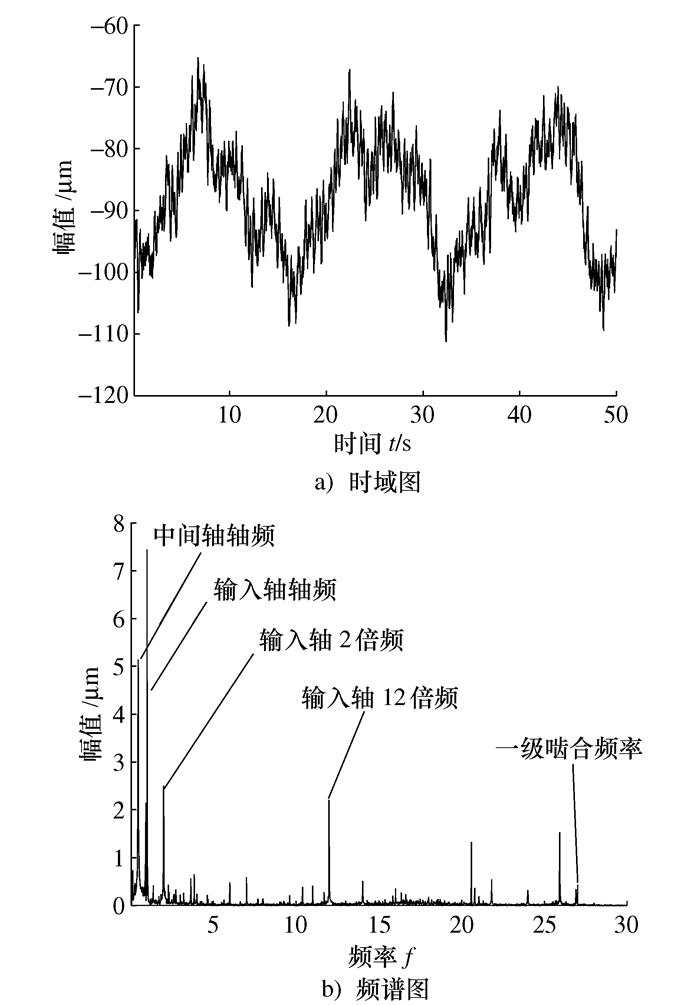
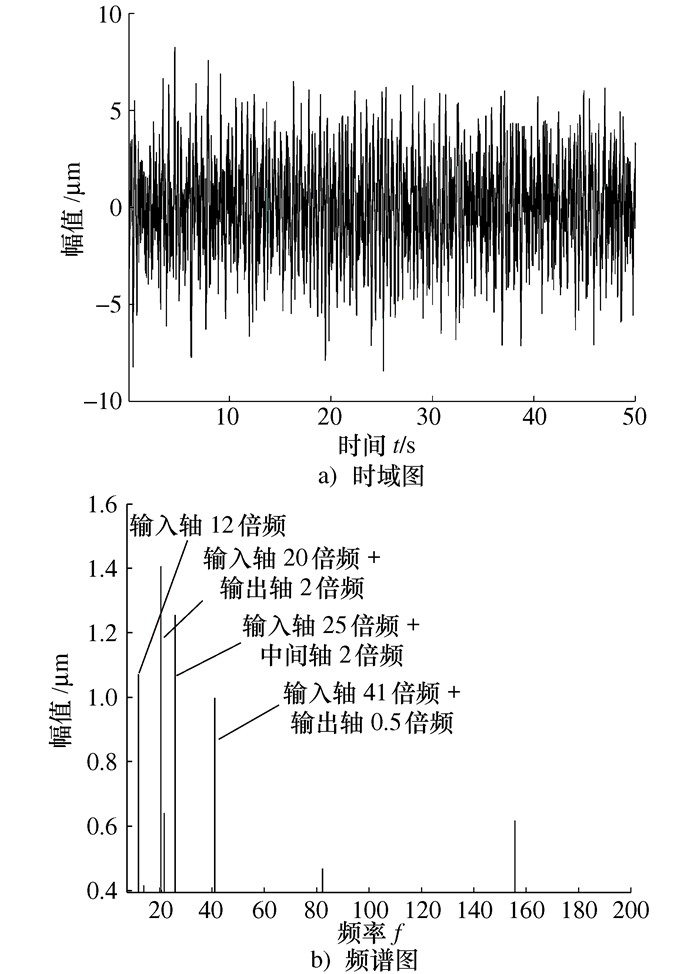
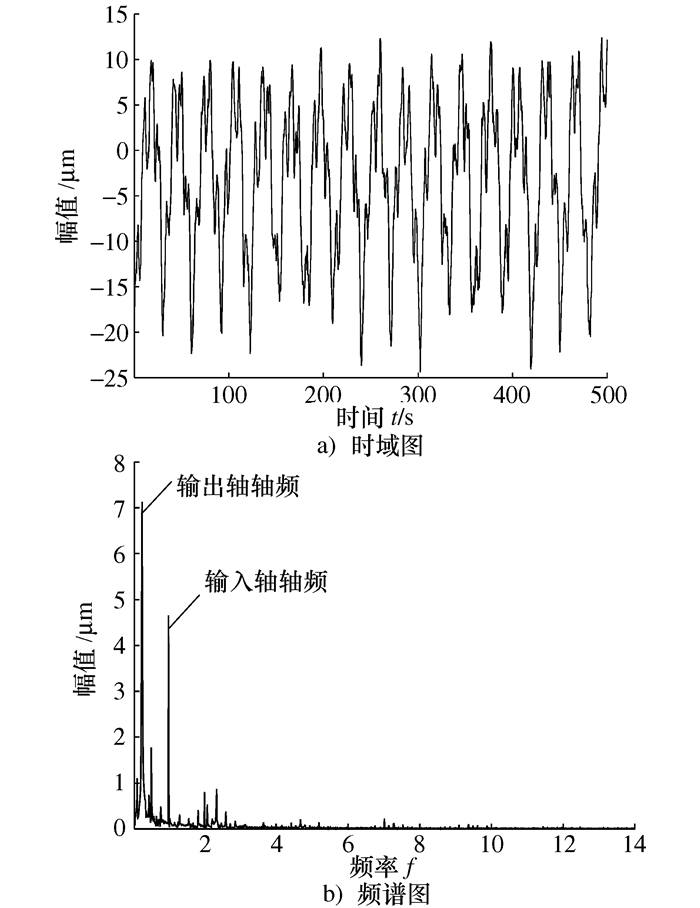
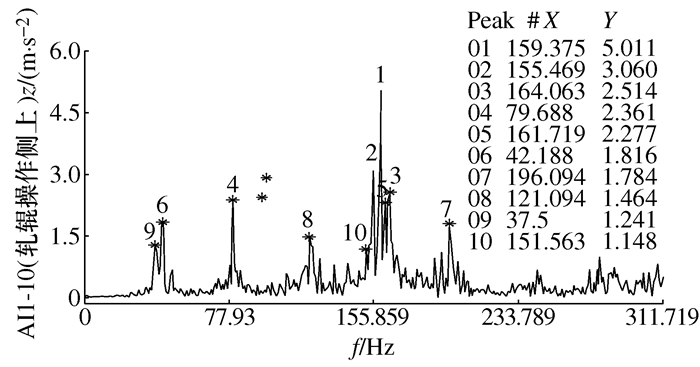
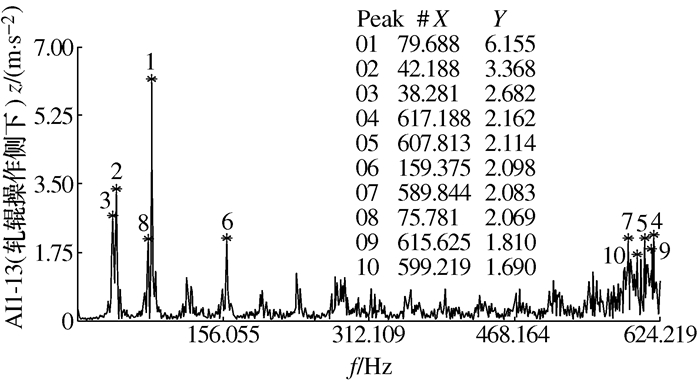
Case deformation and transmission error are the key factors of NVH (Noise, Vibration and Harshness)performance of electric vehicle reducer. A joint test of transmission error and case deformation of the reducer was carried out to obtain the law of single-tooth transmission error, overall transmission error and case deformation under different torques. Time and frequency characteristics of single-tooth transmission error, overall transmission error and case deformation under different torques were analyzed, and the interaction effects were also analyzed. The analysis results showed that: transmission error and case deformation influenced each other, the case deformation of measuring points was consistent with the second-stage single-tooth transmission error. The overall transmission error was closely related to the amplitude at the input-shaft or output-shaft baseband in the radial relative displacement frequency spectrum at the case bearing hole. Raising the radial stiffness at the bearing hole of the case could effectively reduce the transmission error.
Case deformation and transmission error are the key factors of NVH (Noise, Vibration and Harshness)performance of electric vehicle reducer. A joint test of transmission error and case deformation of the reducer was carried out to obtain the law of single-tooth transmission error, overall transmission error and case deformation under different torques. Time and frequency characteristics of single-tooth transmission error, overall transmission error and case deformation under different torques were analyzed, and the interaction effects were also analyzed. The analysis results showed that: transmission error and case deformation influenced each other, the case deformation of measuring points was consistent with the second-stage single-tooth transmission error. The overall transmission error was closely related to the amplitude at the input-shaft or output-shaft baseband in the radial relative displacement frequency spectrum at the case bearing hole. Raising the radial stiffness at the bearing hole of the case could effectively reduce the transmission error.








2022, 41(1): 25-30.
doi: 10.13433/j.cnki.1003-8728.20200328
Abstract:
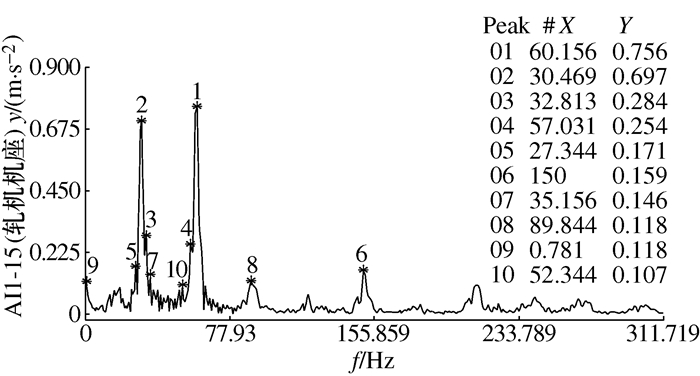
According to the actual structure of hot strip mill, a simplified model for single stand rolling mill is established by using lumped mass method, mass element and spring element to express roll system vibration, and beam element to build stand contour. Based on the above-mentioned, COMBIN40 is used to add the assembly clearance of roll bearing seat, and the influence of the clearance on the inherent characteristics of rolling mill system is considered. Through modal analysis, it is found that the gap leads to an increase in the low-order frequency and vibration of rolling mill system. The simulation results are compared with the field measured data to verify the feasibility of the model.
According to the actual structure of hot strip mill, a simplified model for single stand rolling mill is established by using lumped mass method, mass element and spring element to express roll system vibration, and beam element to build stand contour. Based on the above-mentioned, COMBIN40 is used to add the assembly clearance of roll bearing seat, and the influence of the clearance on the inherent characteristics of rolling mill system is considered. Through modal analysis, it is found that the gap leads to an increase in the low-order frequency and vibration of rolling mill system. The simulation results are compared with the field measured data to verify the feasibility of the model.




2022, 41(1): 31-39.
doi: 10.13433/j.cnki.1003-8728.20200310
Abstract:
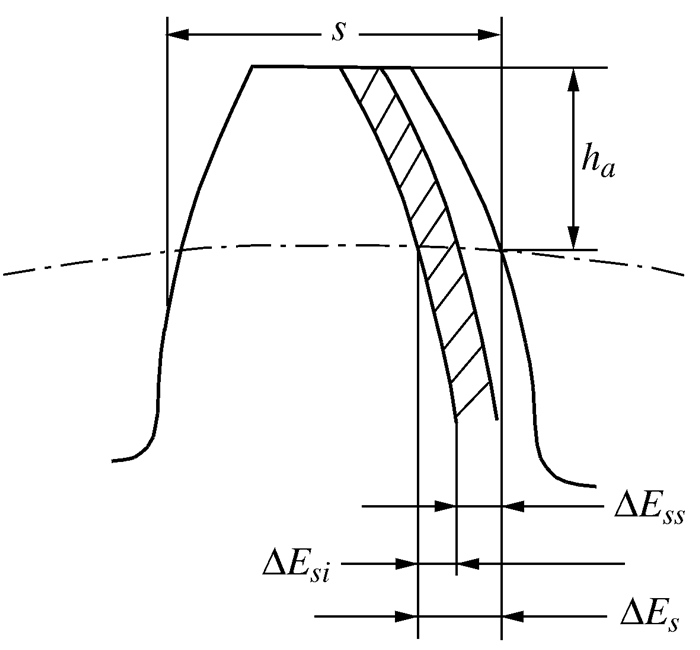
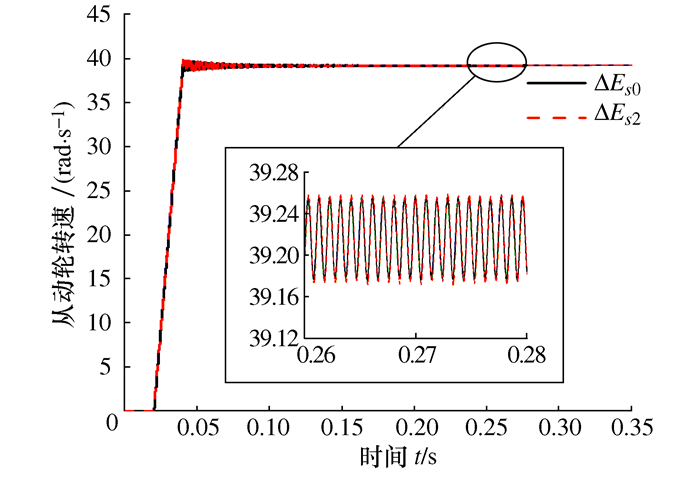
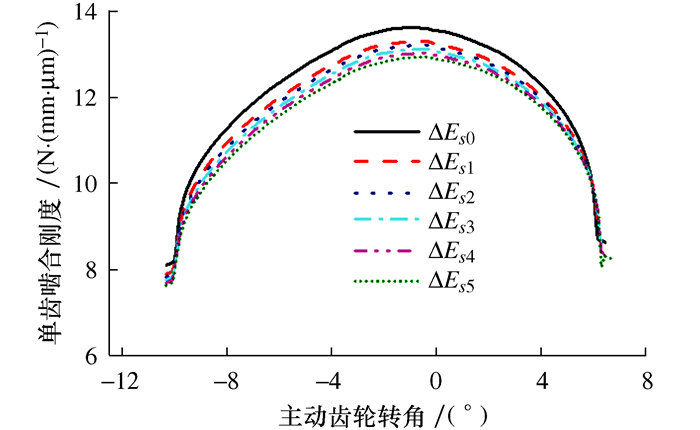
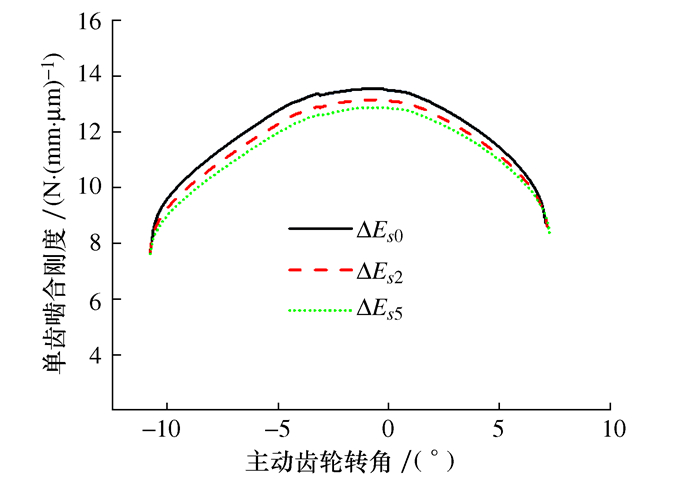
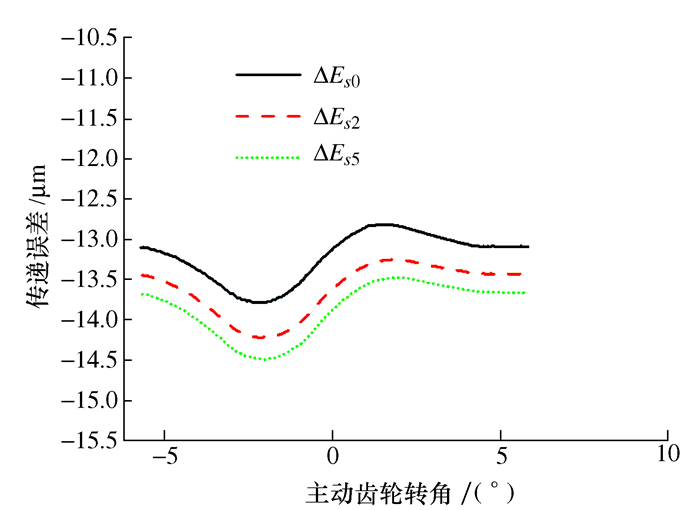
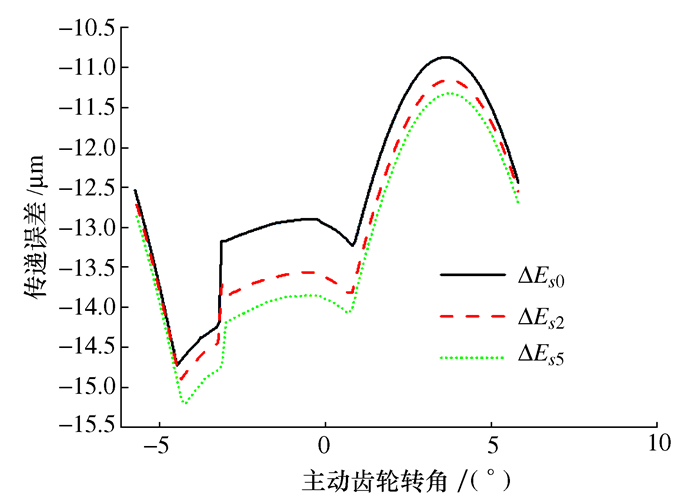
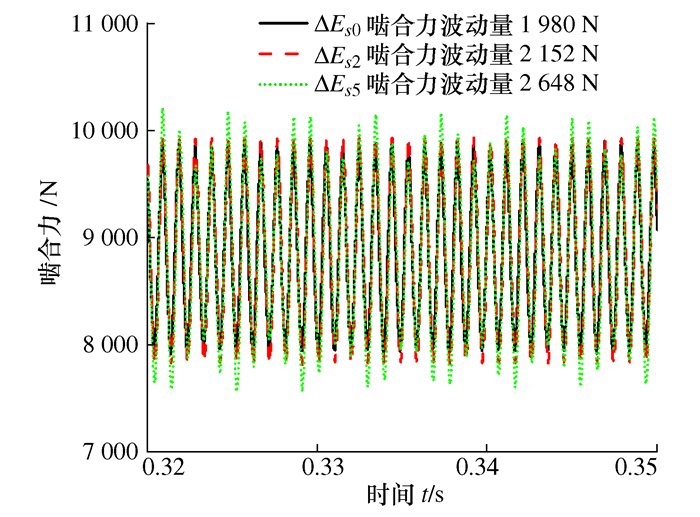
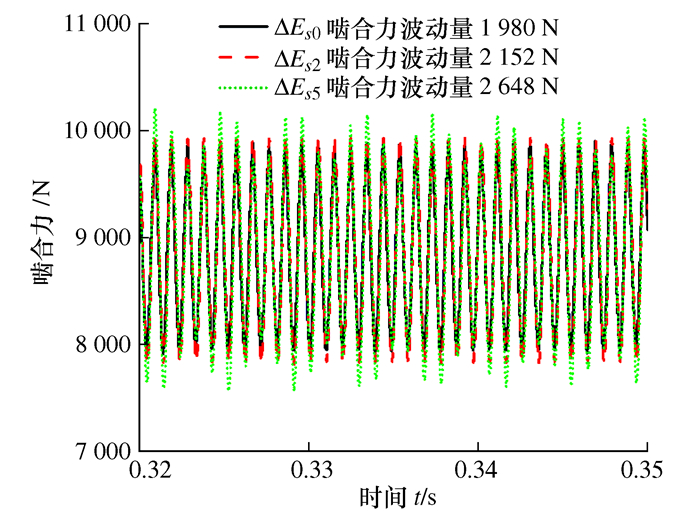
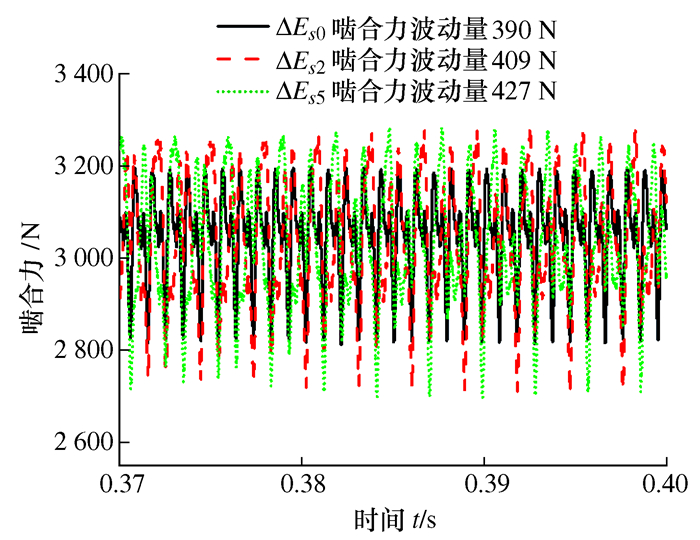
In order to study the influence of the tooth thickness deviation on the vibration characteristics of the cylindrical gear pair, the calculation models of the meshing stiffness and transmission error of the cylindrical gear pair considering the tooth thickness deviation were established, and the influence of the tooth thickness deviation on the cylindrical gear pair meshing stiffness and transmission error excitation was analyzed. Then, the finite element model of the meshing gear pair of the cylindrical gear considering the tooth thickness deviation was established, and the influence of the tooth thickness deviation on the vibration characteristics of the cylindrical gear pair was analyzed. The results show that as the tooth thickness deviation increases, the single tooth meshing stiffness of the gear pair decreases, the transmission error and meshing vibration increase; as the helix angle decreases, the single tooth meshing stiffness of the gear pair gradually decreases, the transmission error fluctuation and meshing vibration increase, and the gear pair vibration characteristics are more sensitive to the tooth thickness deviation; as the acting torque decreases, the meshing stiffness of the single tooth of the gear pair decreases, the transmission error excitation decreases, and meshing vibration decreases. At the same time, the sensitivity of the gear pair vibration characteristics to the tooth thickness deviation is reduced.
In order to study the influence of the tooth thickness deviation on the vibration characteristics of the cylindrical gear pair, the calculation models of the meshing stiffness and transmission error of the cylindrical gear pair considering the tooth thickness deviation were established, and the influence of the tooth thickness deviation on the cylindrical gear pair meshing stiffness and transmission error excitation was analyzed. Then, the finite element model of the meshing gear pair of the cylindrical gear considering the tooth thickness deviation was established, and the influence of the tooth thickness deviation on the vibration characteristics of the cylindrical gear pair was analyzed. The results show that as the tooth thickness deviation increases, the single tooth meshing stiffness of the gear pair decreases, the transmission error and meshing vibration increase; as the helix angle decreases, the single tooth meshing stiffness of the gear pair gradually decreases, the transmission error fluctuation and meshing vibration increase, and the gear pair vibration characteristics are more sensitive to the tooth thickness deviation; as the acting torque decreases, the meshing stiffness of the single tooth of the gear pair decreases, the transmission error excitation decreases, and meshing vibration decreases. At the same time, the sensitivity of the gear pair vibration characteristics to the tooth thickness deviation is reduced.


















2022, 41(1): 40-46.
doi: 10.13433/j.cnki.1003-8728.20200337
Abstract:
In order to determine the dynamic performance change of the linear motor feed system with its worktable moving, the dynamic model of the linear motor feed system with the worktable at different positions was established with the D'Alembert principle. Based on the numerical simulation of the ANSYS Workbench platform, the modal responses of the linear motor feed system whose worktable was located at the leftmost, middle and rightmost positions were obtained for the first 4 orders of natural frequencies and mode shapes. The modal experiments on the two-axis linear motor feed system were carried out by using the single-point excitation and multi-point vibration picking method that uses a hammer. The natural frequencies and vibration modes at three different positions were obtained by the LMS test analysis system. The experimental results verify the correctness and rationality of the numerical simulation of the dynamic response of the linear motor feed system when its worktable moves at different positions. It is also found that the dynamic characteristics of the linear motor feed system change with the worktable position. The low-order natural frequency of the feed system is greater when the worktable is at the middle position than at the leftmost and rightmost positions, and its mass distribution shifts with the change of the worktable position, providing a basis for the reasonable determination of the dynamic time-varying characteristics of the linear motor feed system under complex working conditions.
In order to determine the dynamic performance change of the linear motor feed system with its worktable moving, the dynamic model of the linear motor feed system with the worktable at different positions was established with the D'Alembert principle. Based on the numerical simulation of the ANSYS Workbench platform, the modal responses of the linear motor feed system whose worktable was located at the leftmost, middle and rightmost positions were obtained for the first 4 orders of natural frequencies and mode shapes. The modal experiments on the two-axis linear motor feed system were carried out by using the single-point excitation and multi-point vibration picking method that uses a hammer. The natural frequencies and vibration modes at three different positions were obtained by the LMS test analysis system. The experimental results verify the correctness and rationality of the numerical simulation of the dynamic response of the linear motor feed system when its worktable moves at different positions. It is also found that the dynamic characteristics of the linear motor feed system change with the worktable position. The low-order natural frequency of the feed system is greater when the worktable is at the middle position than at the leftmost and rightmost positions, and its mass distribution shifts with the change of the worktable position, providing a basis for the reasonable determination of the dynamic time-varying characteristics of the linear motor feed system under complex working conditions.





2022, 41(1): 47-52.
doi: 10.13433/j.cnki.1003-8728.20200306
Abstract:
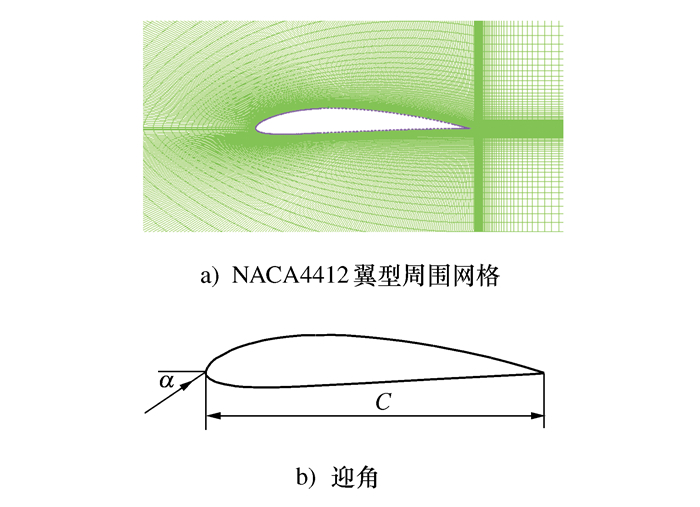
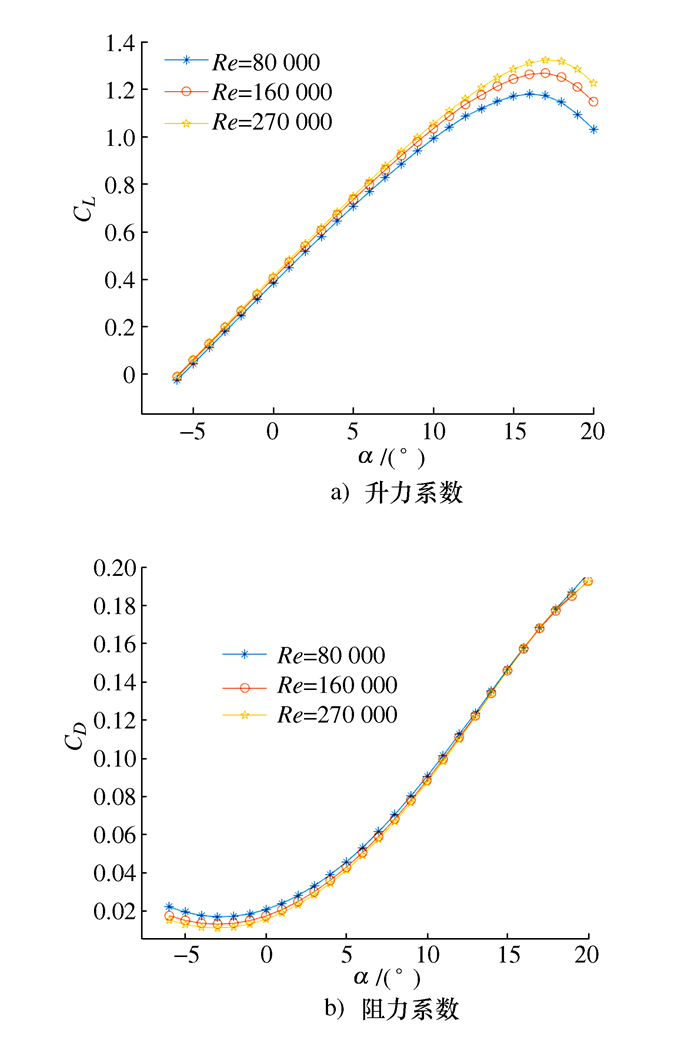
This paper combines aerodynamics with mechanical structure design, and designs a robot platform that can move flexibly on the wall, can transition between simple adjacent walls, can carry a certain weight, is caterpillar walking mode, and provide thrust with coaxial twin rotor wings. Firstly, the 2-dimensional external flow field of the selected rotor wing is calculated, and the "most economical state point" is obtained to determine the installation angle of the upper and lower rotor wings to be 6° and 5° respectively. Then, the relationship among rotor wing's diameter, the mechanism of rotor wing's thrust and motor power is solved. The weight of each part of the platform is then correlated based on the rotor wing's diameter. Finally, the rotor wing's diameter, motor power and machine weight are connected in series to establish Simulink simulation model. When the rotor wing's diameter is equal to 376.4 mm, the robot platform with the minimum weight is obtained. The discussion and calculation of rotor wing's mounting angle, diameter and weight of the whole machine lay a foundation for the next step of 3D simulation and physical construction for robot platform.
This paper combines aerodynamics with mechanical structure design, and designs a robot platform that can move flexibly on the wall, can transition between simple adjacent walls, can carry a certain weight, is caterpillar walking mode, and provide thrust with coaxial twin rotor wings. Firstly, the 2-dimensional external flow field of the selected rotor wing is calculated, and the "most economical state point" is obtained to determine the installation angle of the upper and lower rotor wings to be 6° and 5° respectively. Then, the relationship among rotor wing's diameter, the mechanism of rotor wing's thrust and motor power is solved. The weight of each part of the platform is then correlated based on the rotor wing's diameter. Finally, the rotor wing's diameter, motor power and machine weight are connected in series to establish Simulink simulation model. When the rotor wing's diameter is equal to 376.4 mm, the robot platform with the minimum weight is obtained. The discussion and calculation of rotor wing's mounting angle, diameter and weight of the whole machine lay a foundation for the next step of 3D simulation and physical construction for robot platform.





2022, 41(1): 53-59.
doi: 10.13433/j.cnki.1003-8728.20200332
Abstract:
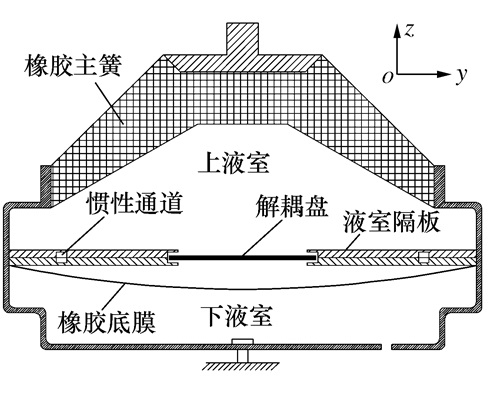
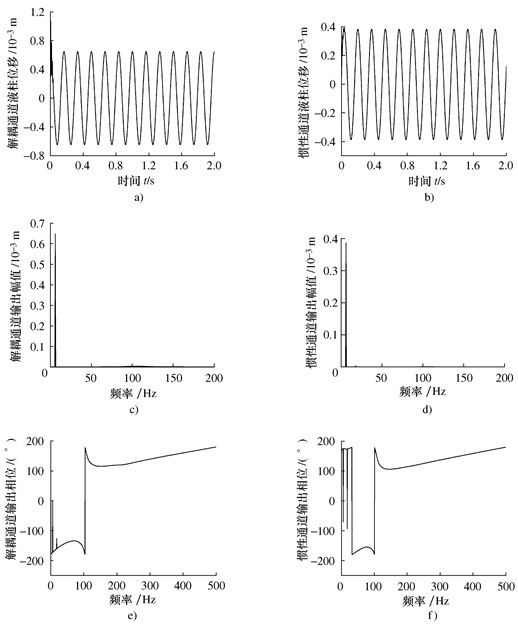
A hydraulic engine mount is a typical non-linear system. It has good dynamic characteristics under different excitations, and the dynamic characteristics are closely related to the suspension parameters. Therefore, based on the Volterra series theory, this paper studies the inertial track floating and decoupling of the hydraulic engine mount and proposes a method for identifying its nonlinear damping lag angle and the nonlinear damping parameters of the liquid damping mechanism. Its damping parameters are obtained when the output and some structural parameters are known, and the error between the damping parameter value obtained with a certain range of excitation frequencies and the experimental parameter value can be kept within 3%. The method is used to compare and verify the damping lag angle of the hydraulic engine mount identified with the Volterra series theory; the comparison shows good consistency with the experimental results.
A hydraulic engine mount is a typical non-linear system. It has good dynamic characteristics under different excitations, and the dynamic characteristics are closely related to the suspension parameters. Therefore, based on the Volterra series theory, this paper studies the inertial track floating and decoupling of the hydraulic engine mount and proposes a method for identifying its nonlinear damping lag angle and the nonlinear damping parameters of the liquid damping mechanism. Its damping parameters are obtained when the output and some structural parameters are known, and the error between the damping parameter value obtained with a certain range of excitation frequencies and the experimental parameter value can be kept within 3%. The method is used to compare and verify the damping lag angle of the hydraulic engine mount identified with the Volterra series theory; the comparison shows good consistency with the experimental results.



2022, 41(1): 60-66.
doi: 10.13433/j.cnki.1003-8728.20200331
Abstract:
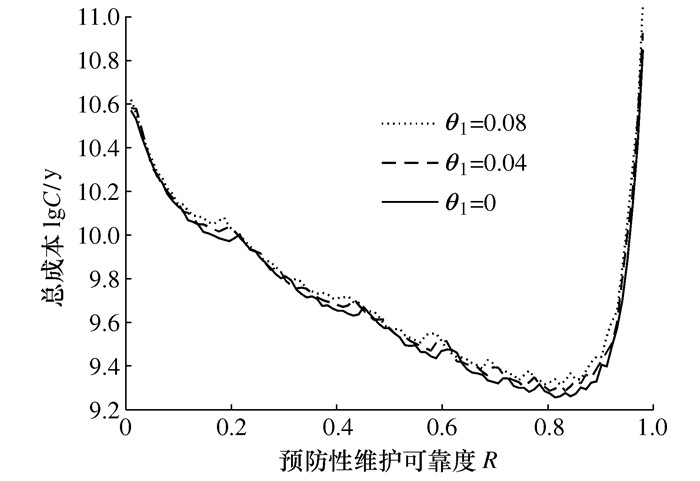
In order to explore the influence of fault correlation on the maintenance of EMU components, the fault correlation between components is described by fault chain theory, and the evolution law of component failure rate is analyzed under the condition of non-new repair. The maintenance cycle of a single component is optimized with reliability degree as the center and minimum cost within a replacement cycle as the goal. Considering economic relevance, opportunity maintenance strategy is introduced to optimize component maintenance cycle from system level. The example shows that when there is a fault related effect between components, more maintenance cost is needed to ensure the reliability of the affected components. At the same time, the maintenance plan for the affected component is affected by the maintenance plan for the component that is responsible for its failure. Opportunity maintenance strategy can effectively reduce the cost of equipment maintenance and has certain reference significance for equipment maintenance decision.
In order to explore the influence of fault correlation on the maintenance of EMU components, the fault correlation between components is described by fault chain theory, and the evolution law of component failure rate is analyzed under the condition of non-new repair. The maintenance cycle of a single component is optimized with reliability degree as the center and minimum cost within a replacement cycle as the goal. Considering economic relevance, opportunity maintenance strategy is introduced to optimize component maintenance cycle from system level. The example shows that when there is a fault related effect between components, more maintenance cost is needed to ensure the reliability of the affected components. At the same time, the maintenance plan for the affected component is affected by the maintenance plan for the component that is responsible for its failure. Opportunity maintenance strategy can effectively reduce the cost of equipment maintenance and has certain reference significance for equipment maintenance decision.




2022, 41(1): 67-74.
doi: 10.13433/j.cnki.1003-8728.20200305
Abstract:
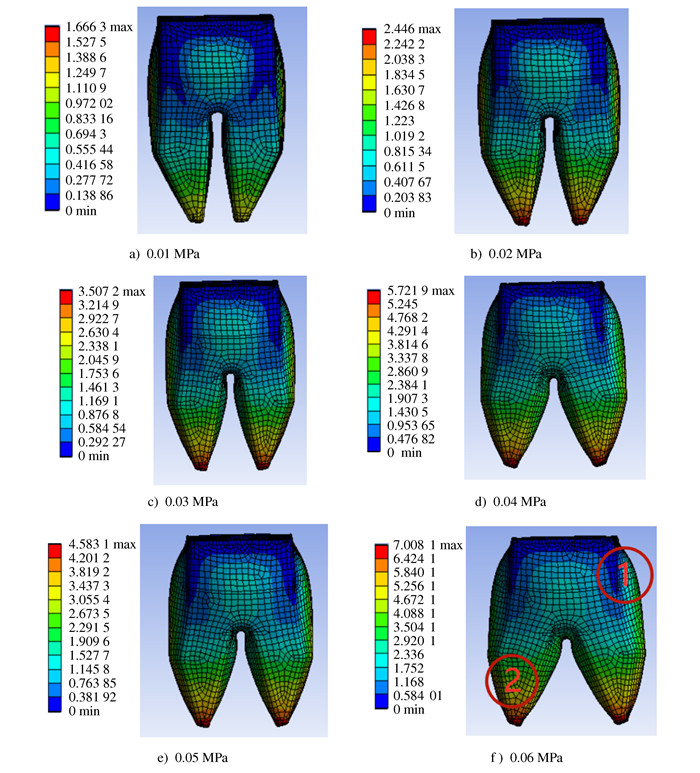
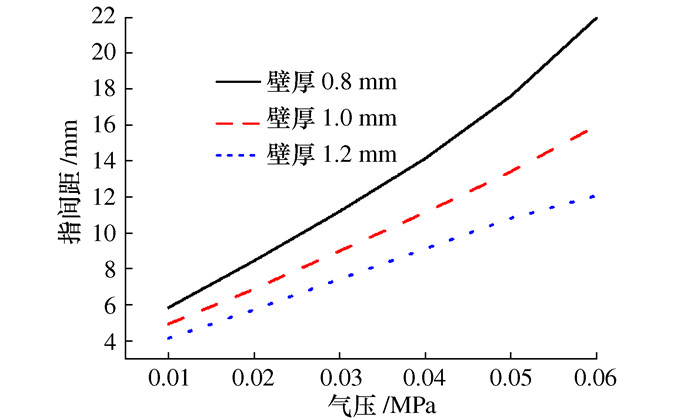
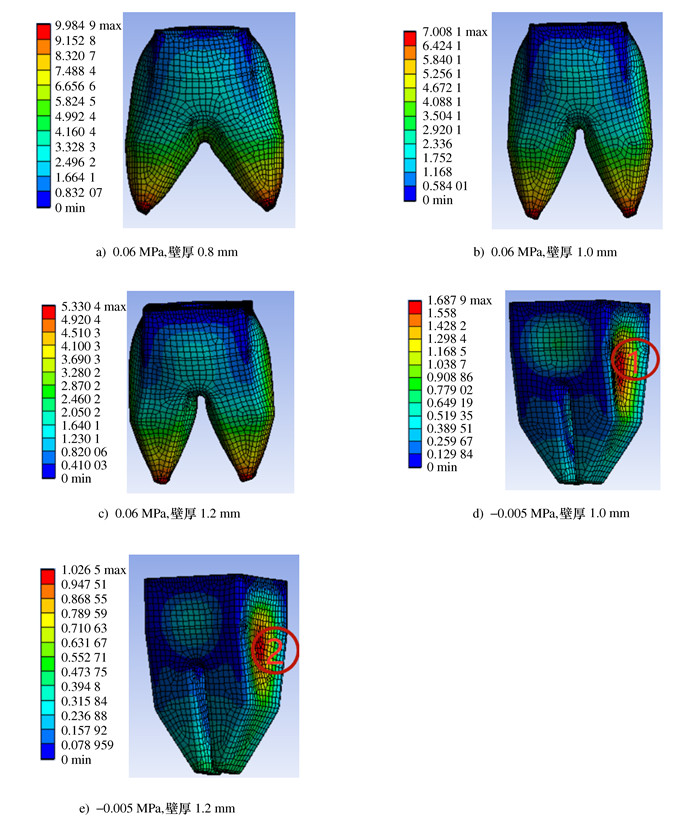
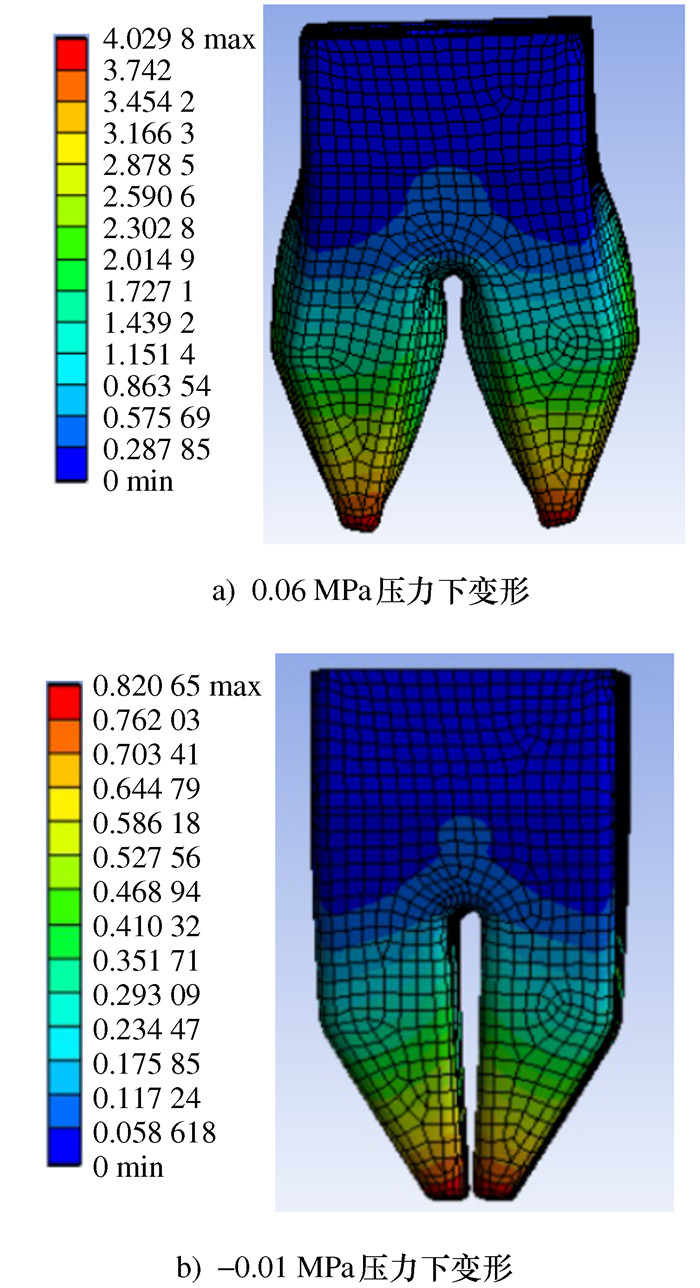
In order to realize the stable grasp of micro fragile and irregular objects, combined with the flexibility of soft materials and the accuracy of beak structure grasping, a bionic beak micro pneumatic soft mechanical gripper is proposed and designed. The mechanical gripper not only has good environmental adaptability of general soft gripper, but also has more concise structure and is especially suitable for grasping micro objects. Using Yeoh constitutive model and ANSYS software, the bending characteristics of the bionic gripper are simulated by finite element method, and the optimization of variable wall thickness and local filling is carried out according to the simulation results. The bending characteristics, grasping force and adaptability of the optimized bionic gripper were tested, and the feasibility of the bionic beak micro pneumatic soft mechanical gripper was verified.
In order to realize the stable grasp of micro fragile and irregular objects, combined with the flexibility of soft materials and the accuracy of beak structure grasping, a bionic beak micro pneumatic soft mechanical gripper is proposed and designed. The mechanical gripper not only has good environmental adaptability of general soft gripper, but also has more concise structure and is especially suitable for grasping micro objects. Using Yeoh constitutive model and ANSYS software, the bending characteristics of the bionic gripper are simulated by finite element method, and the optimization of variable wall thickness and local filling is carried out according to the simulation results. The bending characteristics, grasping force and adaptability of the optimized bionic gripper were tested, and the feasibility of the bionic beak micro pneumatic soft mechanical gripper was verified.











2022, 41(1): 75-81.
doi: 10.13433/j.cnki.1003-8728.20200625
Abstract:
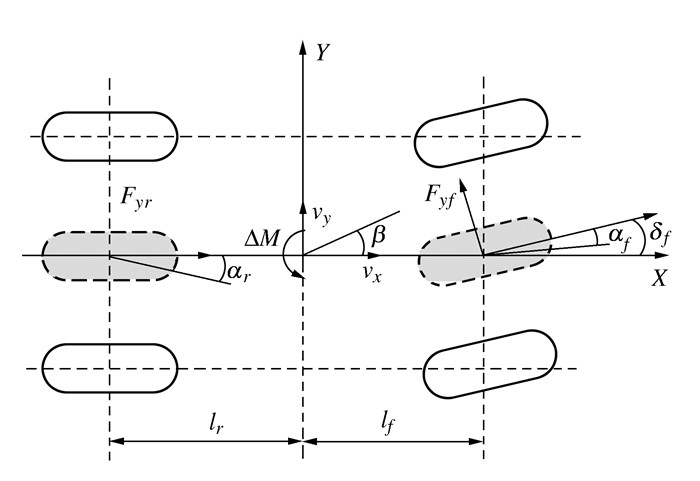
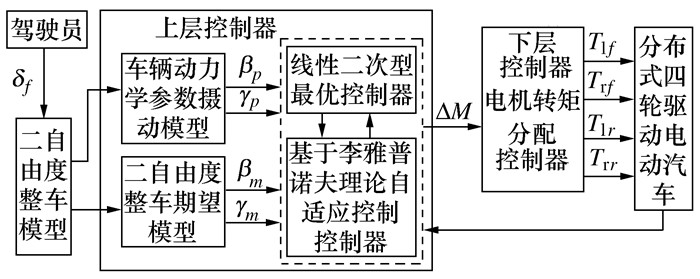
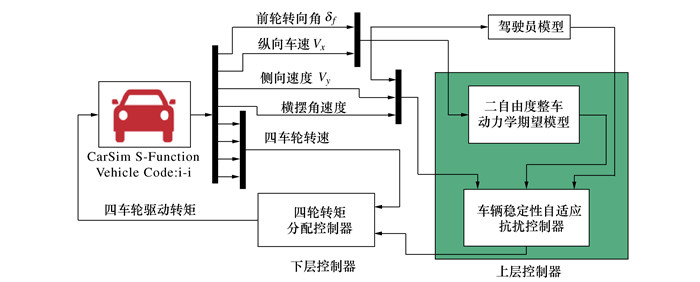
Aiming at the problem that nonlinear parameter disturbance of dynamic model often affects torque control stability of distributed drive electric vehicle, a new torque adaptive hierarchical control method is proposed in this paper. Firstly, the two degree of freedom vehicle dynamical model and the expected vehicle dynamical model of four-wheel independent drive electric vehicle are established. Then, the linear optimal quadratic controller is designed to realize the tracking control of the yaw stability parameters of the ideal two degree of freedom model, and the active additional yaw control moment is calculated. Aiming at the problem of vehicle dynamic model parameter disturbance, based on Lyapunov stability theory, adaptive control algorithm is used to improve the adaptive ability of linear optimal quadratic controller and reduce the control deviation caused by the change of control object parameters. Finally, the co-simulation platform of CarSim and MATLAB / Simulink is built to verify the effectiveness of the method. Simulation results show that the designed adaptive disturbance rejection torque controller can effectively improve the yaw stability of four-wheel independent drive electric vehicle.
Aiming at the problem that nonlinear parameter disturbance of dynamic model often affects torque control stability of distributed drive electric vehicle, a new torque adaptive hierarchical control method is proposed in this paper. Firstly, the two degree of freedom vehicle dynamical model and the expected vehicle dynamical model of four-wheel independent drive electric vehicle are established. Then, the linear optimal quadratic controller is designed to realize the tracking control of the yaw stability parameters of the ideal two degree of freedom model, and the active additional yaw control moment is calculated. Aiming at the problem of vehicle dynamic model parameter disturbance, based on Lyapunov stability theory, adaptive control algorithm is used to improve the adaptive ability of linear optimal quadratic controller and reduce the control deviation caused by the change of control object parameters. Finally, the co-simulation platform of CarSim and MATLAB / Simulink is built to verify the effectiveness of the method. Simulation results show that the designed adaptive disturbance rejection torque controller can effectively improve the yaw stability of four-wheel independent drive electric vehicle.


2022, 41(1): 82-87.
doi: 10.13433/j.cnki.1003-8728.20200334
Abstract:
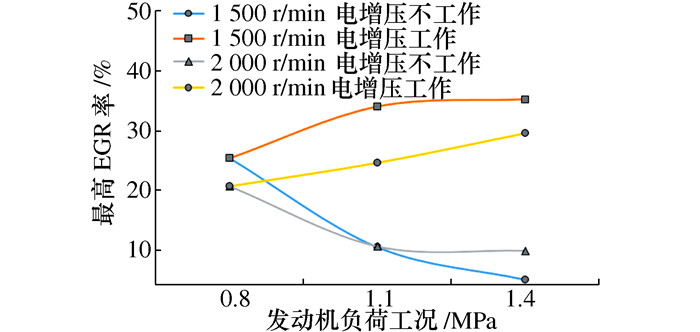
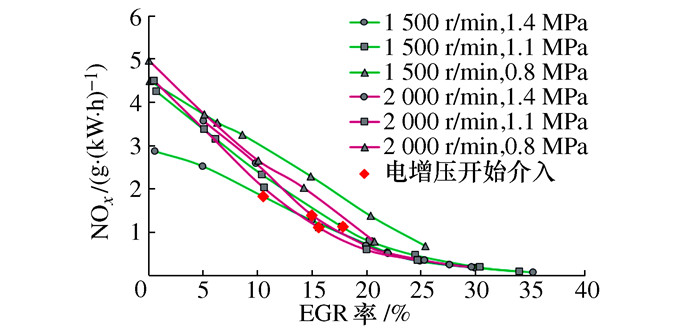
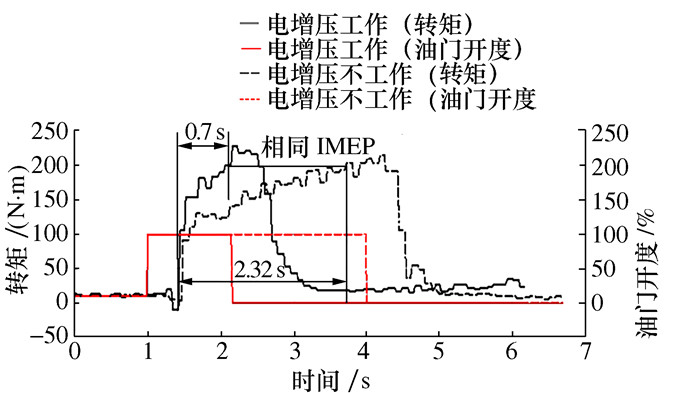
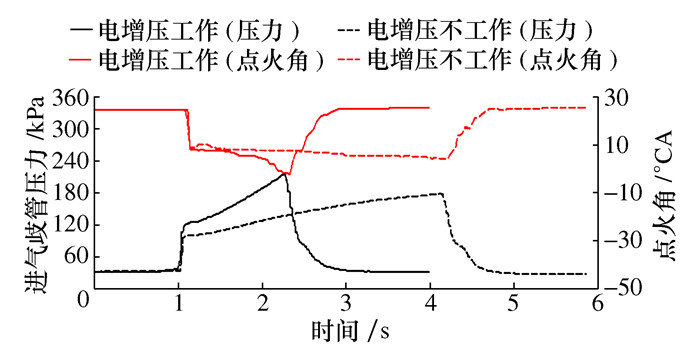
In this paper, an electric supercharger was installed on a GDI gasoline engine with LP-EGR system. The engine performance and emission changes were experimentally investigated by combining the electric supercharger technology and EGR. Meanwhile, the transient responses of dynamic and EGR rate also were discussed. The results show that the EGR rate could reach 25% at WOT and low speed with electric charger working. That led to the optimization of combustion phase at 1 250~2 000 r/min. The fuel consumption declined by 8.5%~10%, and NOx emission also lowered observably. And at partial load, the maximum EGR rate were higher than 30% with the pumping effect of electric charger. That caused fuel consumption and NOx emission simultaneously improve, and the maximum decreasing rate of fuel consumption could be 10.8%. In addition, with electric charger working, the transient response time would be contracted by 2/3 from 0.2 MPa to 1.5 MPa at 1 500 r/min. When engine was accelerated working, the built-up time of EGR rate in intake manifold could contracted 1.3 s with electric charger working.
In this paper, an electric supercharger was installed on a GDI gasoline engine with LP-EGR system. The engine performance and emission changes were experimentally investigated by combining the electric supercharger technology and EGR. Meanwhile, the transient responses of dynamic and EGR rate also were discussed. The results show that the EGR rate could reach 25% at WOT and low speed with electric charger working. That led to the optimization of combustion phase at 1 250~2 000 r/min. The fuel consumption declined by 8.5%~10%, and NOx emission also lowered observably. And at partial load, the maximum EGR rate were higher than 30% with the pumping effect of electric charger. That caused fuel consumption and NOx emission simultaneously improve, and the maximum decreasing rate of fuel consumption could be 10.8%. In addition, with electric charger working, the transient response time would be contracted by 2/3 from 0.2 MPa to 1.5 MPa at 1 500 r/min. When engine was accelerated working, the built-up time of EGR rate in intake manifold could contracted 1.3 s with electric charger working.










2022, 41(1): 88-97.
doi: 10.13433/j.cnki.1003-8728.20200626
Abstract:
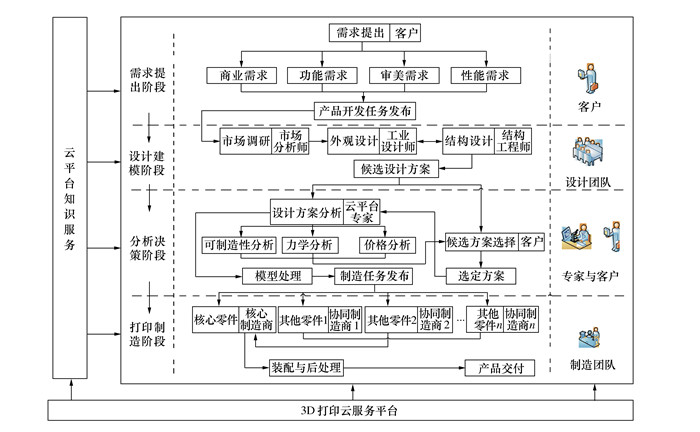
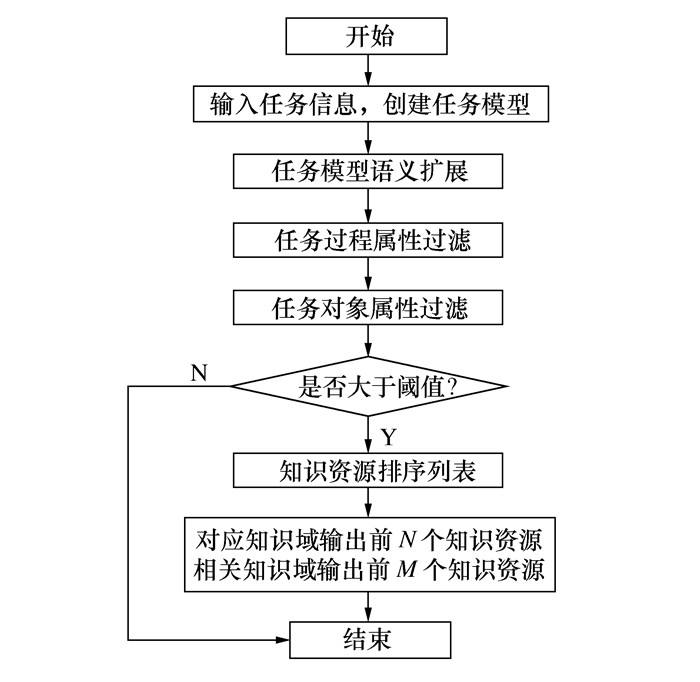
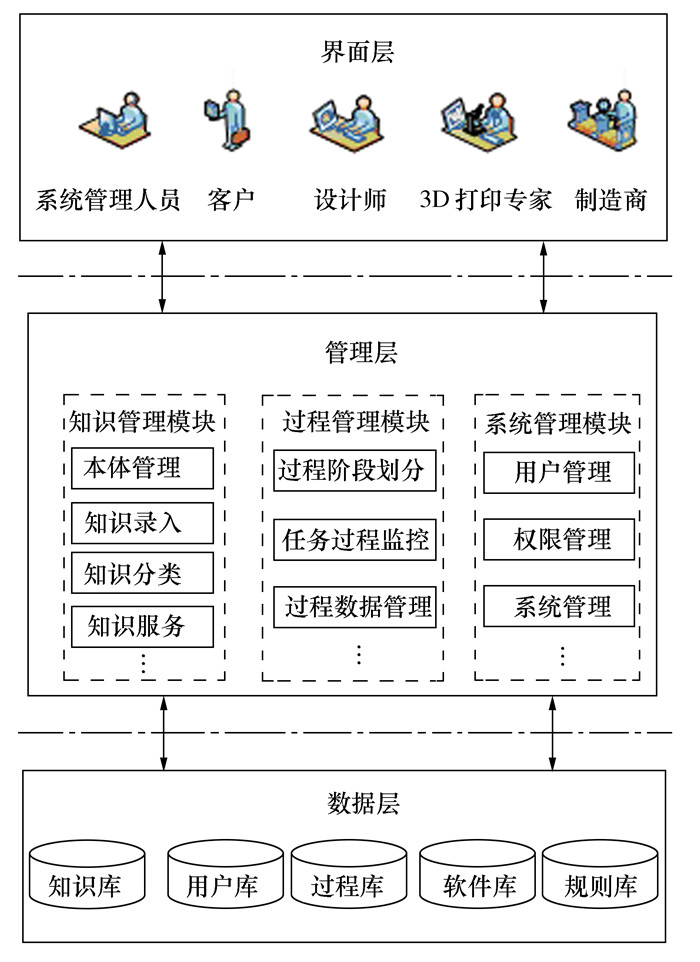
In order to effectively assist users to complete product development tasks on the 3D printing cloud service platform, a knowledge management model for the 3D printing cloud service platform based on the task information was proposed according to the characteristics of the 3D printing cloud service platform with complex task flow and diverse task subject types. The knowledge types of the 3D printing cloud platform were sorted out, the typical task process of the platform was analyzed, and the information interaction mapping model between task stages was established. The 3D printing cloud platform model, knowledge management based on ontology semantic representation of knowledge and task is built, for a specific task stage, the integrated process properties and the attributes of the object task knowledge double filtering model is put forward, through the task object attribute semantic extension to ensure the integrity of knowledge scheme, implements the personalized knowledge service. A knowledge management system under the environment of 3D printing cloud platform is developed, and the feasibility and rationality of the management model proposed in this paper are verified by a case.
In order to effectively assist users to complete product development tasks on the 3D printing cloud service platform, a knowledge management model for the 3D printing cloud service platform based on the task information was proposed according to the characteristics of the 3D printing cloud service platform with complex task flow and diverse task subject types. The knowledge types of the 3D printing cloud platform were sorted out, the typical task process of the platform was analyzed, and the information interaction mapping model between task stages was established. The 3D printing cloud platform model, knowledge management based on ontology semantic representation of knowledge and task is built, for a specific task stage, the integrated process properties and the attributes of the object task knowledge double filtering model is put forward, through the task object attribute semantic extension to ensure the integrity of knowledge scheme, implements the personalized knowledge service. A knowledge management system under the environment of 3D printing cloud platform is developed, and the feasibility and rationality of the management model proposed in this paper are verified by a case.



2022, 41(1): 98-103.
doi: 10.13433/j.cnki.1003-8728.20200303
Abstract:
According to the orthogonal experiment in the high speed cylindrical grinding under dry and wet modes, the influence of the grinding wheel linear speed, workpiece rotate speed and grinding depth on the specific energy of 40CrNiMoA was studied. The model for predicting the specific energy of grinding was established based on the BP neural network, and the prediction results were validated. The results show that the specific energy of grinding increases first and then decreases with the increasing of grinding wheel linear speed, and it decreases with the increasing of workpiece rotate speed and the grinding depth. The workpiece rotate speed has the greatest influence on the specific energy of grinding. The specific energy of grinding in wet mode is smaller than that in dry mode. For the range of process parameters in the experiment, when the grinding wheel linear speed, the workpiece rotate speed and the grinding depth are 60 m/s, 125 r/min and 40 μm, separately, the specific energy of grinding is the smallest. The absolute errors between the predicted value and the experimental are less than 10%, which shows that the prediction model based on the BP neural network is effective.
According to the orthogonal experiment in the high speed cylindrical grinding under dry and wet modes, the influence of the grinding wheel linear speed, workpiece rotate speed and grinding depth on the specific energy of 40CrNiMoA was studied. The model for predicting the specific energy of grinding was established based on the BP neural network, and the prediction results were validated. The results show that the specific energy of grinding increases first and then decreases with the increasing of grinding wheel linear speed, and it decreases with the increasing of workpiece rotate speed and the grinding depth. The workpiece rotate speed has the greatest influence on the specific energy of grinding. The specific energy of grinding in wet mode is smaller than that in dry mode. For the range of process parameters in the experiment, when the grinding wheel linear speed, the workpiece rotate speed and the grinding depth are 60 m/s, 125 r/min and 40 μm, separately, the specific energy of grinding is the smallest. The absolute errors between the predicted value and the experimental are less than 10%, which shows that the prediction model based on the BP neural network is effective.




2022, 41(1): 111-119.
doi: 10.13433/j.cnki.1003-8728.20200333
Abstract:
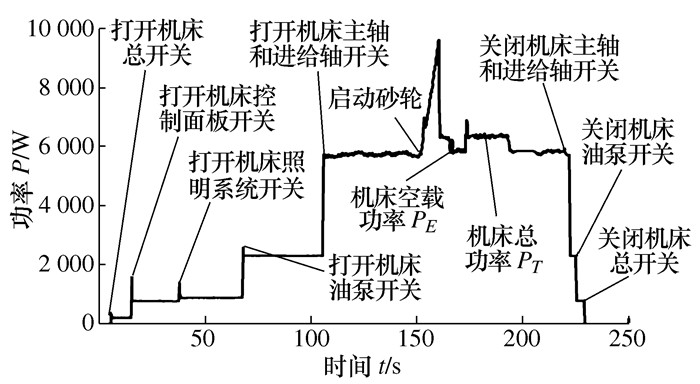
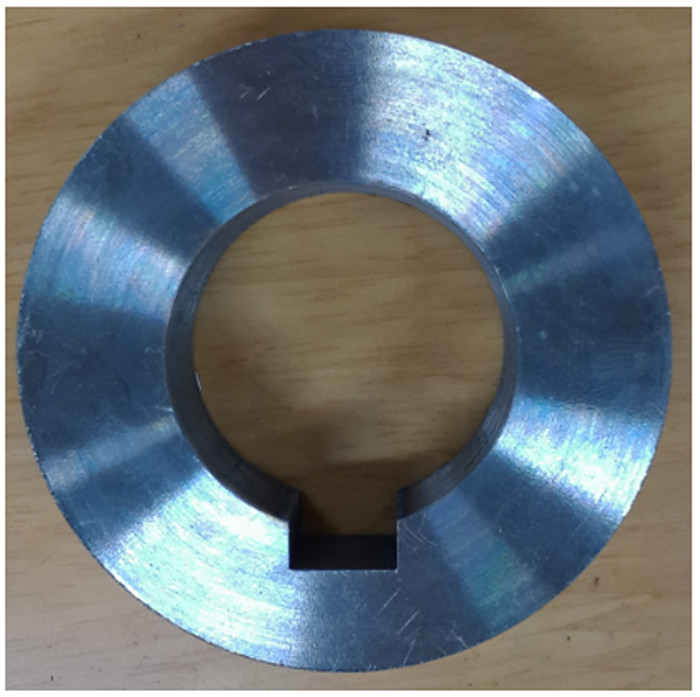
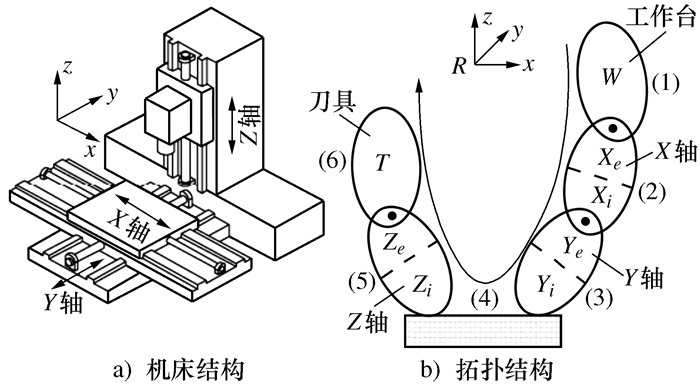
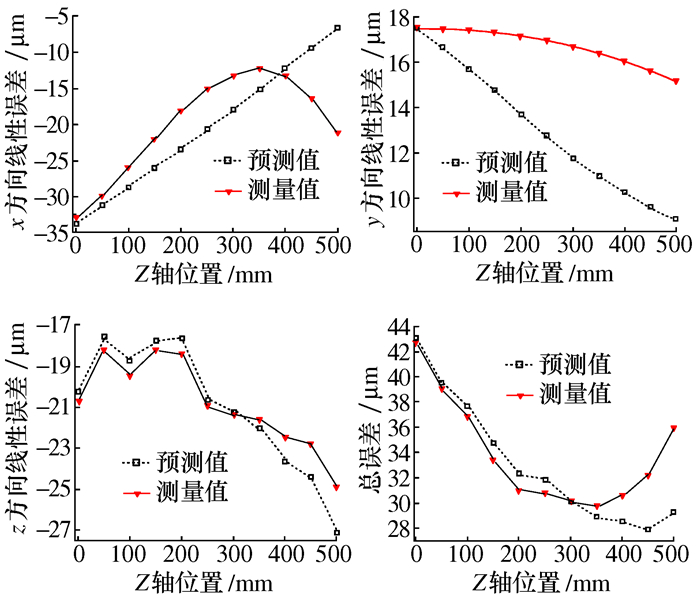
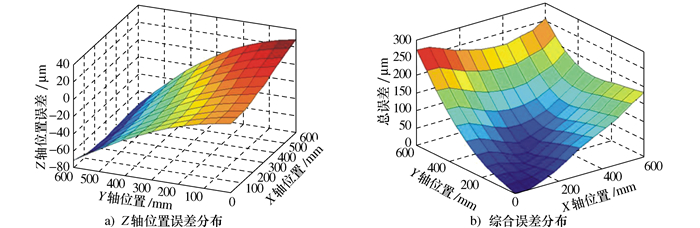
In this paper, the vertical machining center is considered as an example, and a method based on the product of exponential (POE) screw theory for geometric errors modeling of three-axis vertical machining center is proposed. Firstly, three screws are established to represent the six basic geometric error elements of each axis in accordance with the geometric definition of errors and screws. The error POE model for each axis is established to integrate the three screws. Secondly, squareness errors are considered by using POE method to make the POE model for geometric errors more systematic. Two methods are proposed to obtain the POE models for squareness errors according to the geometric properties. Moreover, the topological structure of CNC machine tool is introduced into the POE method to organize the obtained screws and POE models for the three-axis vertical machining center. According to the order of these POE models multiplications, the integrated POE model for geometric errors is established. Finally, the experiments have been conducted on three-axis vertical machining center to verify the model. The results show that the integrated POE model is effective and precise enough. The error field of machine tool is obtained according to the error model.
In this paper, the vertical machining center is considered as an example, and a method based on the product of exponential (POE) screw theory for geometric errors modeling of three-axis vertical machining center is proposed. Firstly, three screws are established to represent the six basic geometric error elements of each axis in accordance with the geometric definition of errors and screws. The error POE model for each axis is established to integrate the three screws. Secondly, squareness errors are considered by using POE method to make the POE model for geometric errors more systematic. Two methods are proposed to obtain the POE models for squareness errors according to the geometric properties. Moreover, the topological structure of CNC machine tool is introduced into the POE method to organize the obtained screws and POE models for the three-axis vertical machining center. According to the order of these POE models multiplications, the integrated POE model for geometric errors is established. Finally, the experiments have been conducted on three-axis vertical machining center to verify the model. The results show that the integrated POE model is effective and precise enough. The error field of machine tool is obtained according to the error model.








2022, 41(1): 120-126.
doi: 10.13433/j.cnki.1003-8728.20200309
Abstract:
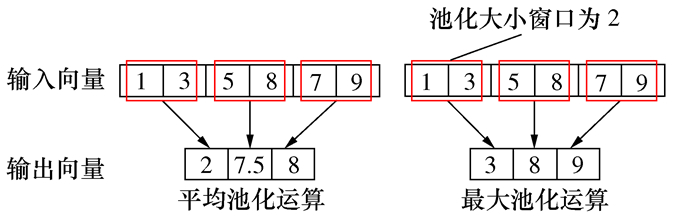
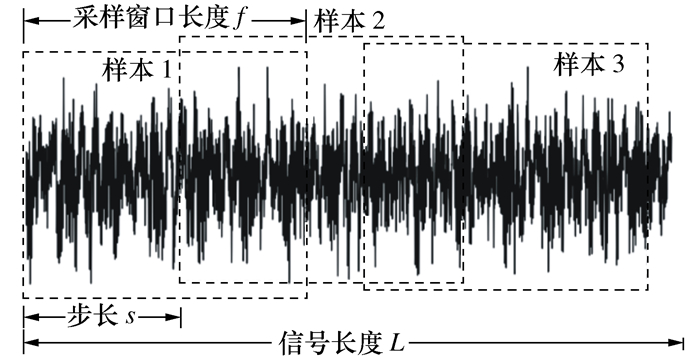
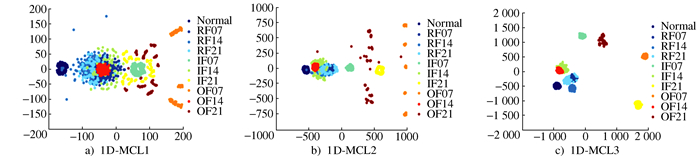
In order to use the massive data from the monitoring system in actual production effectively, and combine the advantages of one-dimensional convolution network in processing one-dimensional data, a new rolling bearing fault diagnosis method based on end-to-end one-dimension multi-scale convolution neural network is proposed. Firstly, two one-dimensional convolution layers and pooling layers are used to reduce the length of the input vibration signal and increase the number of channels. Then, multi-scale parallel one-dimensional convolution check is used to extract and reconstruct the output features on different scales repeatedly. Finally, the extracted features are input to a full connection layer for fault classification. In order to verify the effectiveness of the method, by comparing and analyzing the different working conditions, different training samples of rolling bearing and other algorithms such as support vector machine, BP neural network and cyclic neural network, the simulation results show that the proposed model and method has better recognition effect, and the accuracy of rolling bearing fault diagnosis reaches 99.78%.
In order to use the massive data from the monitoring system in actual production effectively, and combine the advantages of one-dimensional convolution network in processing one-dimensional data, a new rolling bearing fault diagnosis method based on end-to-end one-dimension multi-scale convolution neural network is proposed. Firstly, two one-dimensional convolution layers and pooling layers are used to reduce the length of the input vibration signal and increase the number of channels. Then, multi-scale parallel one-dimensional convolution check is used to extract and reconstruct the output features on different scales repeatedly. Finally, the extracted features are input to a full connection layer for fault classification. In order to verify the effectiveness of the method, by comparing and analyzing the different working conditions, different training samples of rolling bearing and other algorithms such as support vector machine, BP neural network and cyclic neural network, the simulation results show that the proposed model and method has better recognition effect, and the accuracy of rolling bearing fault diagnosis reaches 99.78%.





2022, 41(1): 127-133.
doi: 10.13433/j.cnki.1003-8728.20200640
Abstract:
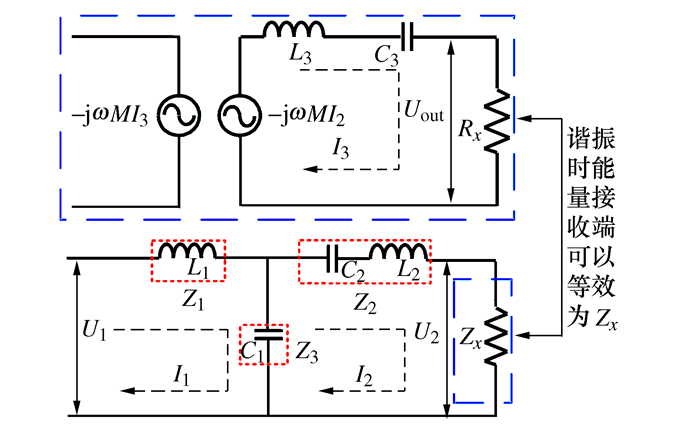
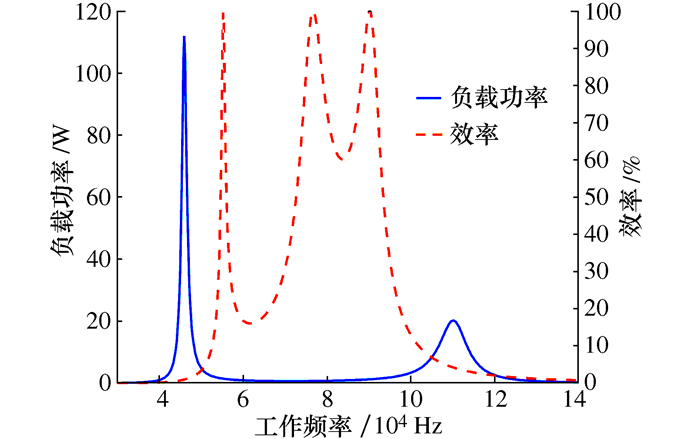
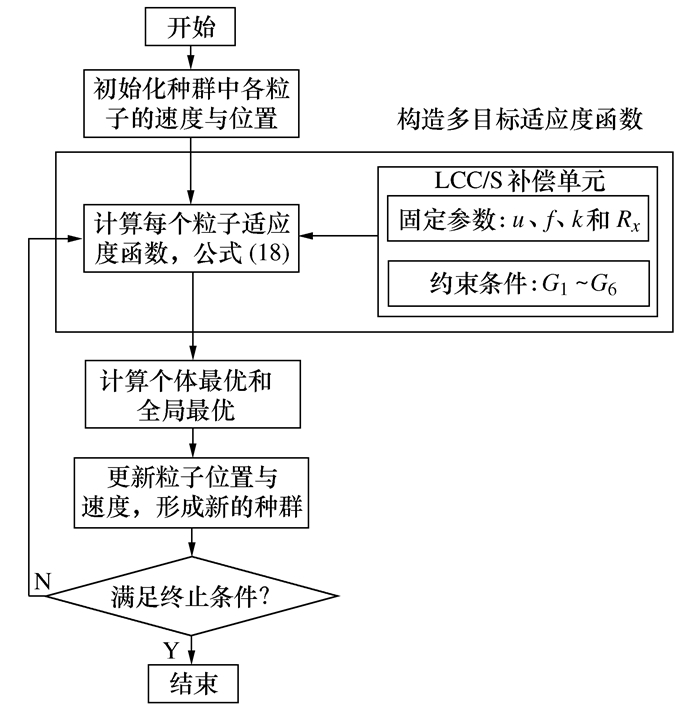
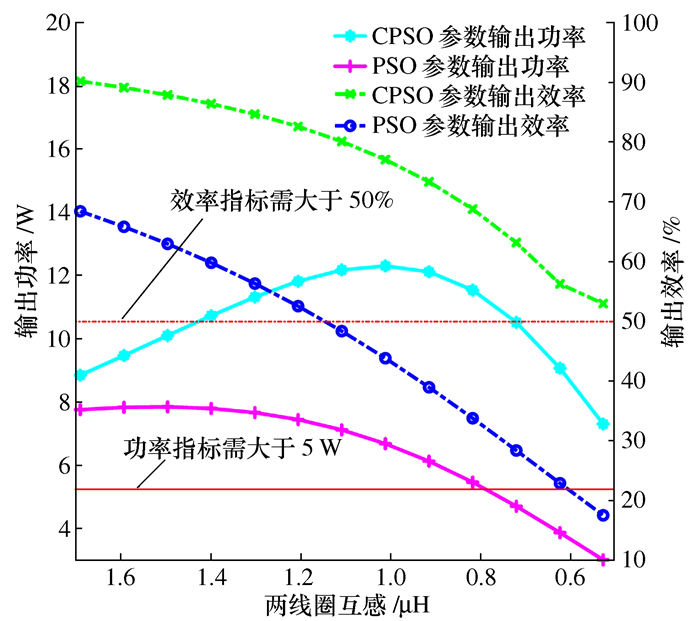
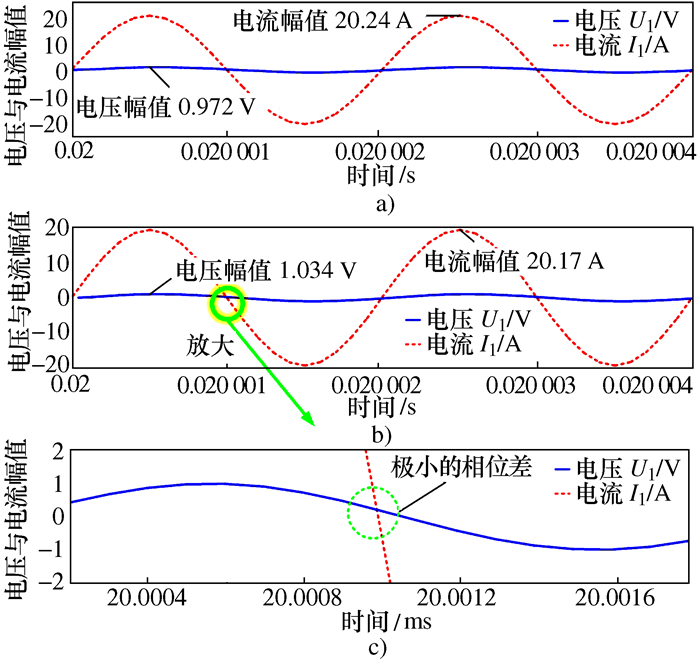
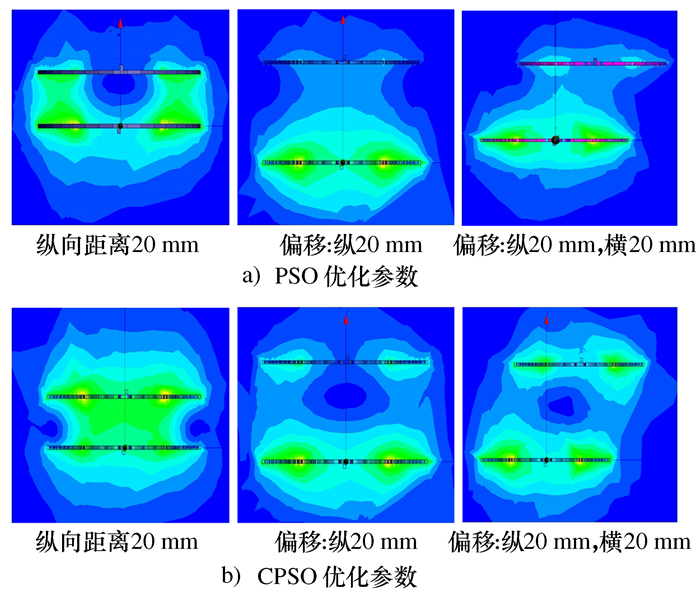
For mobile monitoring sensors with different types and variable position characteristics, the working mode of the LCC/S magnetic resonance coupling mechanism is determined. Due to the difficulty in configuring the resonant compensation topology parameters of this type of wireless power transmission system, which makes it hard to combine output efficiency and output power at the same time in system parameter design, a constraint model with system transmission efficiency as the objective function and the required power within the moving range of the sensor as the limiting condition is proposed in this study. Then a penalty function is introduced to transform the constrained model into an unconstrained model, and a particle swarm algorithm is used for parameter optimization to maximize the transmission efficiency of the system while satisfying the required power of the sensor. Finally, the effectiveness of the optimization method is verified by simulation.
For mobile monitoring sensors with different types and variable position characteristics, the working mode of the LCC/S magnetic resonance coupling mechanism is determined. Due to the difficulty in configuring the resonant compensation topology parameters of this type of wireless power transmission system, which makes it hard to combine output efficiency and output power at the same time in system parameter design, a constraint model with system transmission efficiency as the objective function and the required power within the moving range of the sensor as the limiting condition is proposed in this study. Then a penalty function is introduced to transform the constrained model into an unconstrained model, and a particle swarm algorithm is used for parameter optimization to maximize the transmission efficiency of the system while satisfying the required power of the sensor. Finally, the effectiveness of the optimization method is verified by simulation.







2022, 41(1): 134-142.
doi: 10.13433/j.cnki.1003-8728.20200304
Abstract:
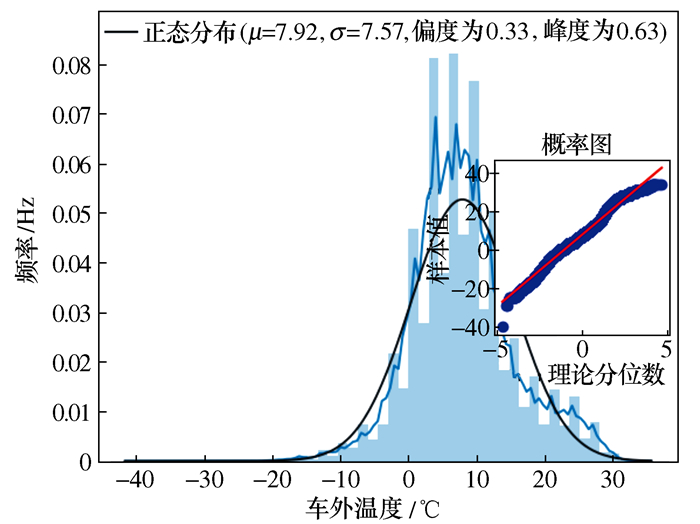
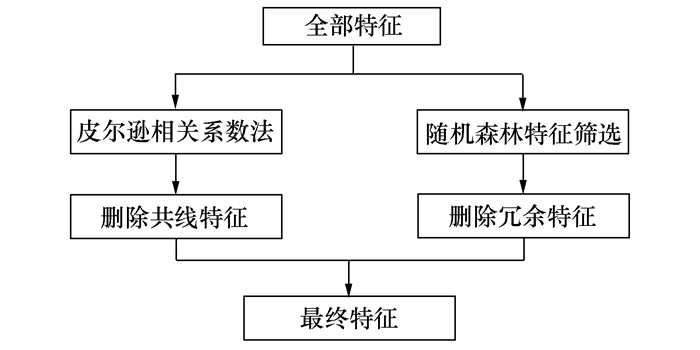
In order to predict the real-time temperature of the vehicle air conditioner a user desires, this paper proposes a method that is coupled with the dual models of habit temperature prediction and time series temperature prediction to predict the real-time temperature of the vehicle air conditioner. The method takes the multi-dimensional information on the car and the information on the outside world as input, filters the features through filtering and random forest, and predicts the user's desired air-conditioning set temperature according to the actual application scenario integrated in the model. Finally, the model is used to verify the test data. The results show that the dual model-coupled method predicts the mean absolute percentage error (MAPE) of the user's vehicle air-conditioning set temperature to be as accurate as 0.049, thus providing auxiliary information on decision-making for intelligent and personalized air-conditioning control.
In order to predict the real-time temperature of the vehicle air conditioner a user desires, this paper proposes a method that is coupled with the dual models of habit temperature prediction and time series temperature prediction to predict the real-time temperature of the vehicle air conditioner. The method takes the multi-dimensional information on the car and the information on the outside world as input, filters the features through filtering and random forest, and predicts the user's desired air-conditioning set temperature according to the actual application scenario integrated in the model. Finally, the model is used to verify the test data. The results show that the dual model-coupled method predicts the mean absolute percentage error (MAPE) of the user's vehicle air-conditioning set temperature to be as accurate as 0.049, thus providing auxiliary information on decision-making for intelligent and personalized air-conditioning control.













2022, 41(1): 143-150.
doi: 10.13433/j.cnki.1003-8728.20200330
Abstract:
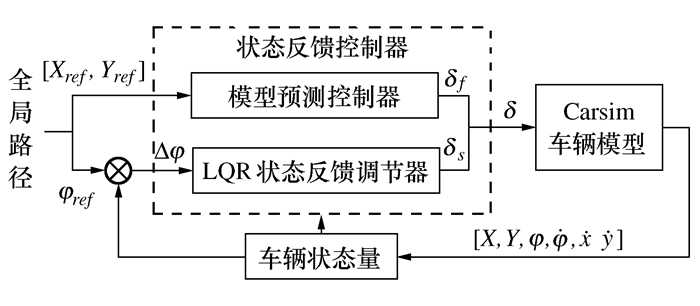
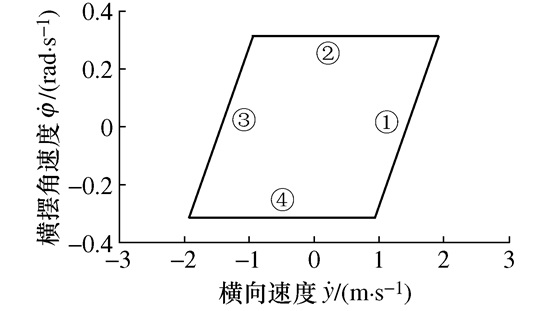
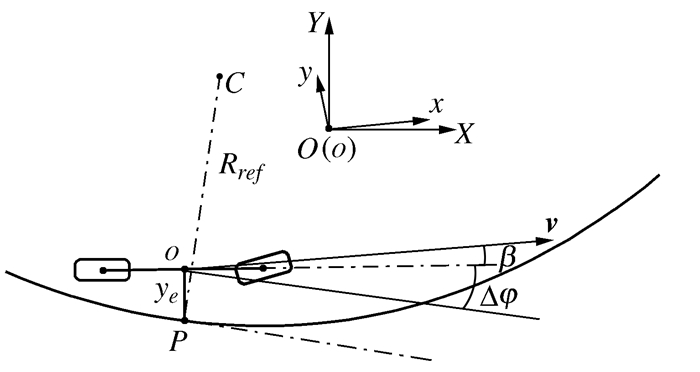
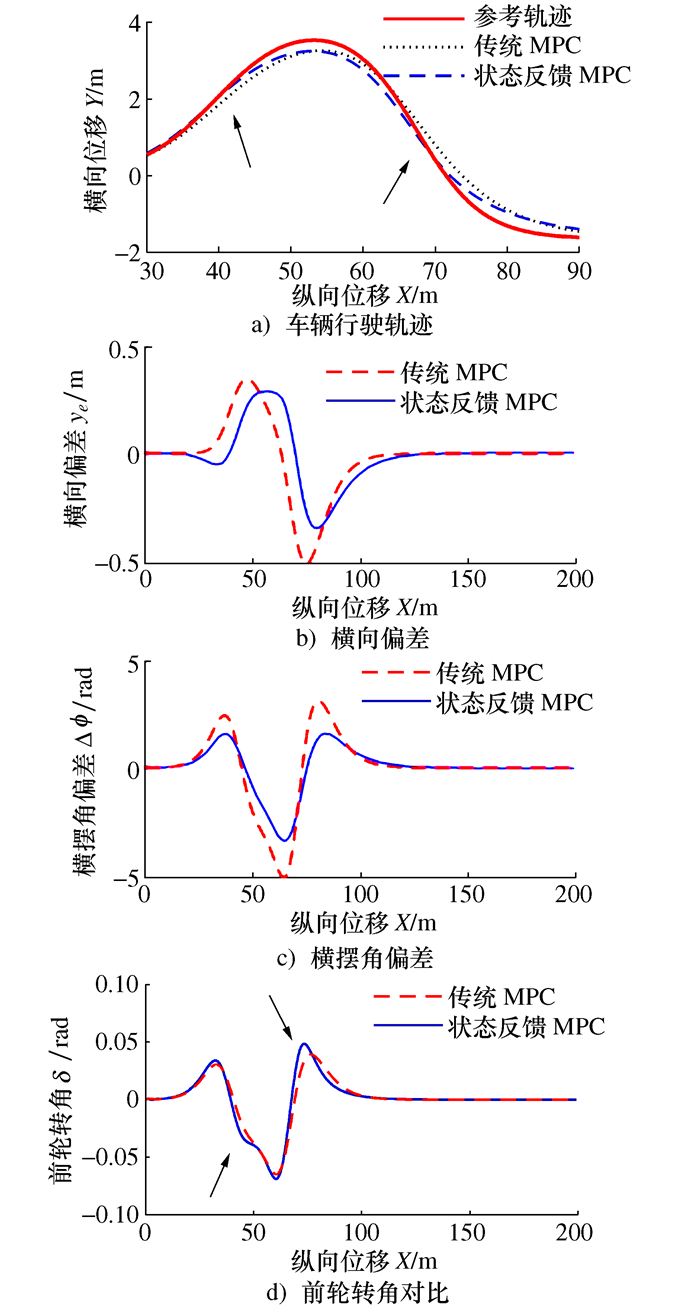
Because it is difficult to guarantee the tracking accuracy of an unmanned vehicle in its bending path with the traditional model predictive controller, this paper proposes a lateral control strategy for the path tracking based on state feedback. Based on the vehicle dynamics model, the path tracking model predictive controller that considers the constraints of the tire slip envelope of the unmanned vehicle is established, and the appropriate time-domain parameters of the controller are selected according to the speed of the unmanned vehicle; its tracking error model is established by using the centroid position of the vehicle as control point. The state feedback regulator is established by combining the yaw angle deviations of the current position of the vehicle, and the attitude of the unmanned vehicle is corrected with the LQR optimal control method. The improved state feedback control strategy is simulated and verified with the MATLAB/Simulink software and the Carsim software. The typical double lane change simulation results show that the lateral deviation of the vehicle's path tracking is reduced by more than 16% and the yaw angle deviation is reduced by 33% at low and medium speeds. Above all, the controller improved in the paper can effectively improve the path tracking accuracy and ensure the adaptability and driving stability of an unmanned vehicle on various curvature bends.
Because it is difficult to guarantee the tracking accuracy of an unmanned vehicle in its bending path with the traditional model predictive controller, this paper proposes a lateral control strategy for the path tracking based on state feedback. Based on the vehicle dynamics model, the path tracking model predictive controller that considers the constraints of the tire slip envelope of the unmanned vehicle is established, and the appropriate time-domain parameters of the controller are selected according to the speed of the unmanned vehicle; its tracking error model is established by using the centroid position of the vehicle as control point. The state feedback regulator is established by combining the yaw angle deviations of the current position of the vehicle, and the attitude of the unmanned vehicle is corrected with the LQR optimal control method. The improved state feedback control strategy is simulated and verified with the MATLAB/Simulink software and the Carsim software. The typical double lane change simulation results show that the lateral deviation of the vehicle's path tracking is reduced by more than 16% and the yaw angle deviation is reduced by 33% at low and medium speeds. Above all, the controller improved in the paper can effectively improve the path tracking accuracy and ensure the adaptability and driving stability of an unmanned vehicle on various curvature bends.





2022, 41(1): 151-158.
doi: 10.13433/j.cnki.1003-8728.20200301
Abstract:
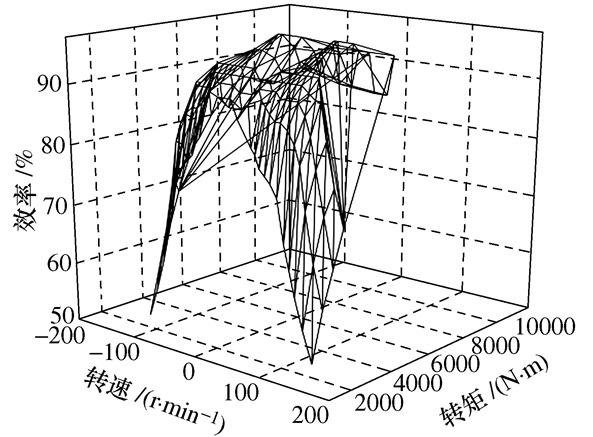
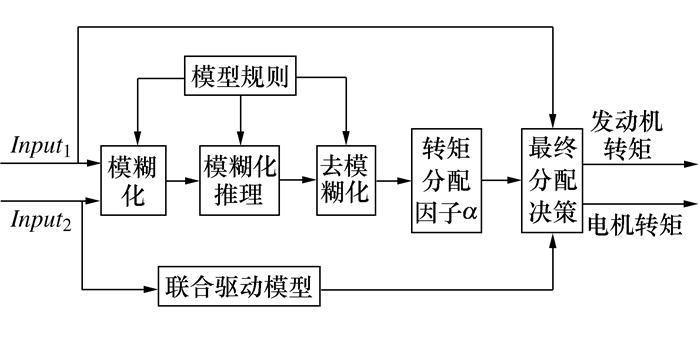
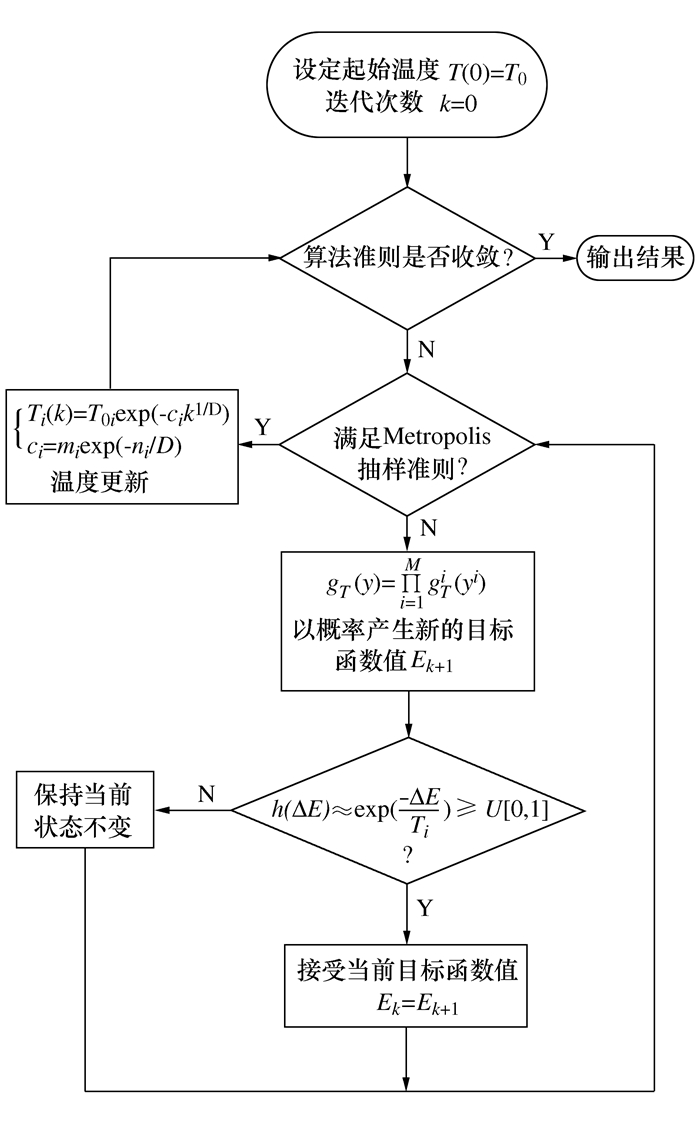
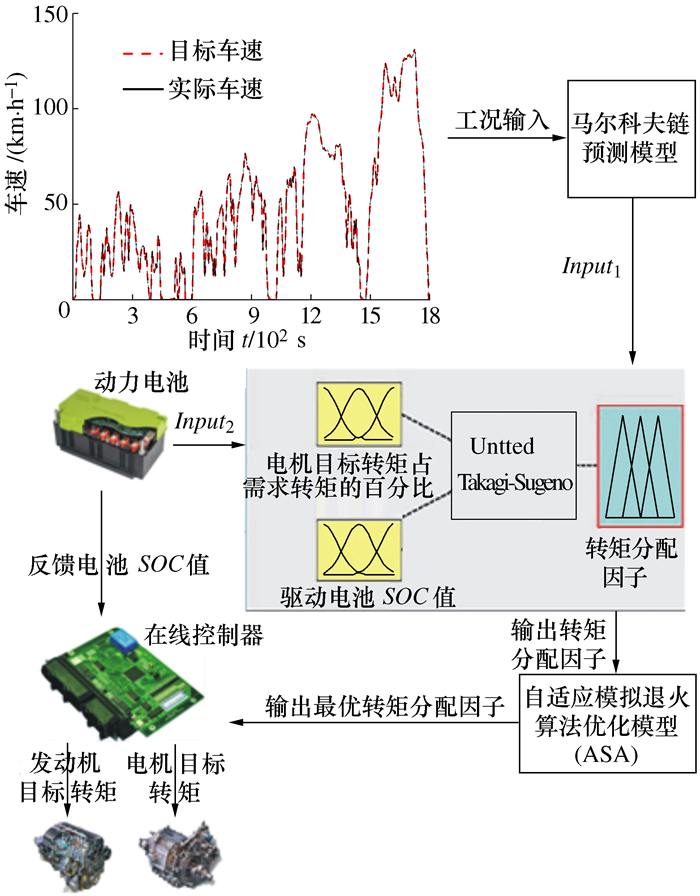
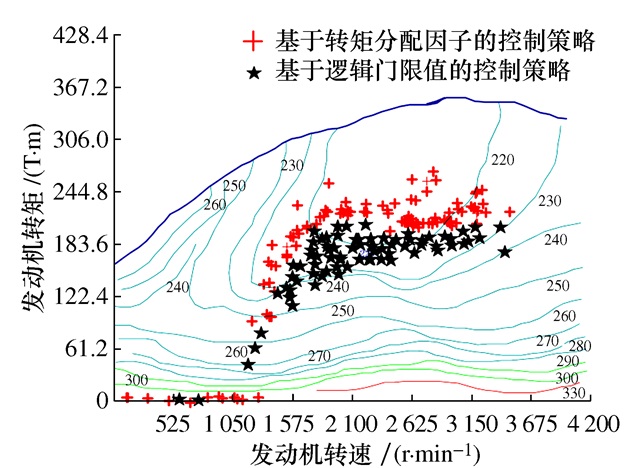
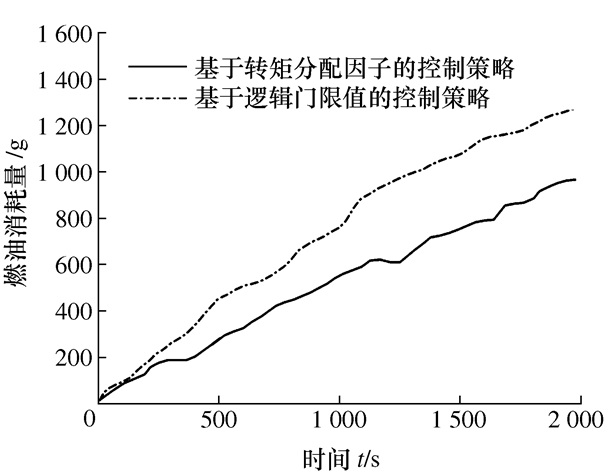
In order to improve the overall efficiency of a parallel hybrid vehicle and to ensure that its engine works in the efficient zone so that the power battery will not cause excessive discharge damage to its service life, the parallel hybrid vehicle torque real-time distribution control strategy is studied. With the global light vehicle test procedure as cycle condition, the Markov chain model is used to predict the demand torque of the hybrid vehicle in the future time domain. Wiwh the percentage of the total demand torque to motor target torque and the battery SOC value in the future time domain as input and the torque distribution factor as output, the fuzzy controller is established, the output value of the fuzzy controller is optimized offline with the adaptive analog annealing algorithm, and the torque demand of the fuzzy controller is optimized through dynamical optimization to ensure that the battery SOC value fluctuates within the set upper and lower limits. With the MATLAB and the Cruise simulation platform, the simulation and comparison with the logic threshold control strategy show that the torque real-time distribution control strategy not only ensures that the engine operates in the efficient zone but also keeps the fluctuation range of the battery SOC value within 3% of the initial value, effectively improving the life of the power battery.
In order to improve the overall efficiency of a parallel hybrid vehicle and to ensure that its engine works in the efficient zone so that the power battery will not cause excessive discharge damage to its service life, the parallel hybrid vehicle torque real-time distribution control strategy is studied. With the global light vehicle test procedure as cycle condition, the Markov chain model is used to predict the demand torque of the hybrid vehicle in the future time domain. Wiwh the percentage of the total demand torque to motor target torque and the battery SOC value in the future time domain as input and the torque distribution factor as output, the fuzzy controller is established, the output value of the fuzzy controller is optimized offline with the adaptive analog annealing algorithm, and the torque demand of the fuzzy controller is optimized through dynamical optimization to ensure that the battery SOC value fluctuates within the set upper and lower limits. With the MATLAB and the Cruise simulation platform, the simulation and comparison with the logic threshold control strategy show that the torque real-time distribution control strategy not only ensures that the engine operates in the efficient zone but also keeps the fluctuation range of the battery SOC value within 3% of the initial value, effectively improving the life of the power battery.












2022, 41(1): 159-164.
doi: 10.13433/j.cnki.1003-8728.20200519
Abstract:
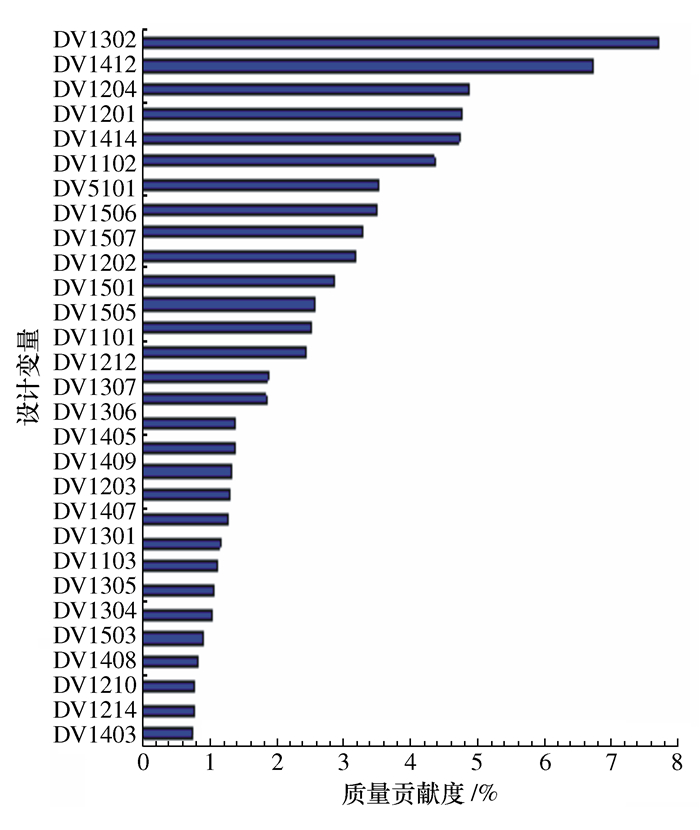
SFE-Concept was used to establish the implicit parameterized model for the white cab body, and the bending stiffness and torsional stiffness were solved and analyzed. With the sensitivity analysis, the thickness, shape and position of 14 body parts were selected as the design variables. The LHD was used to construct the sample data. The fitting accuracy of the response surface approximation model and the successive replacement response surface approximation model were compared and analyzed. The fitting accuracy of the successive replacement response surface was higher. The optimization design was carried out by using the particle swarm optimization algorithm (PSO) to minimize the mass of the vehicle body and constrain the static bending and torsion stiffness. The optimized results were verified. The results showed that the mass of the white body decreased by 17 kg and the lightweight rate was 5.49% while the static stiffness performance of the body remained basically unchanged.
SFE-Concept was used to establish the implicit parameterized model for the white cab body, and the bending stiffness and torsional stiffness were solved and analyzed. With the sensitivity analysis, the thickness, shape and position of 14 body parts were selected as the design variables. The LHD was used to construct the sample data. The fitting accuracy of the response surface approximation model and the successive replacement response surface approximation model were compared and analyzed. The fitting accuracy of the successive replacement response surface was higher. The optimization design was carried out by using the particle swarm optimization algorithm (PSO) to minimize the mass of the vehicle body and constrain the static bending and torsion stiffness. The optimized results were verified. The results showed that the mass of the white body decreased by 17 kg and the lightweight rate was 5.49% while the static stiffness performance of the body remained basically unchanged.