Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2021 Vol. 40, No. 4
Display Method:
2021, 40(4): 493-499.
doi: 10.13433/j.cnki.1003-8728.20200127
 PDF 1576KB
PDF 1576KB
Abstract:
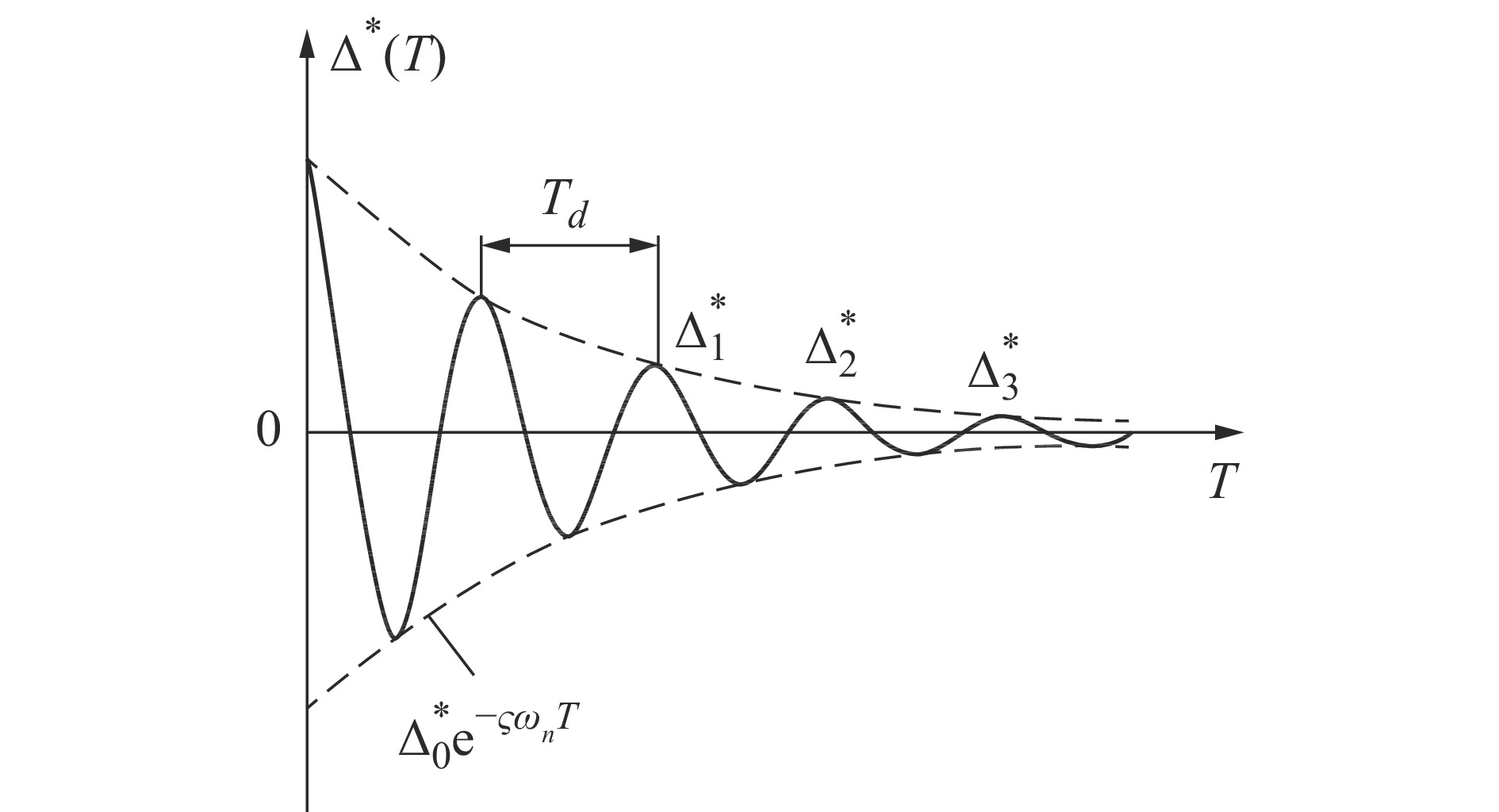
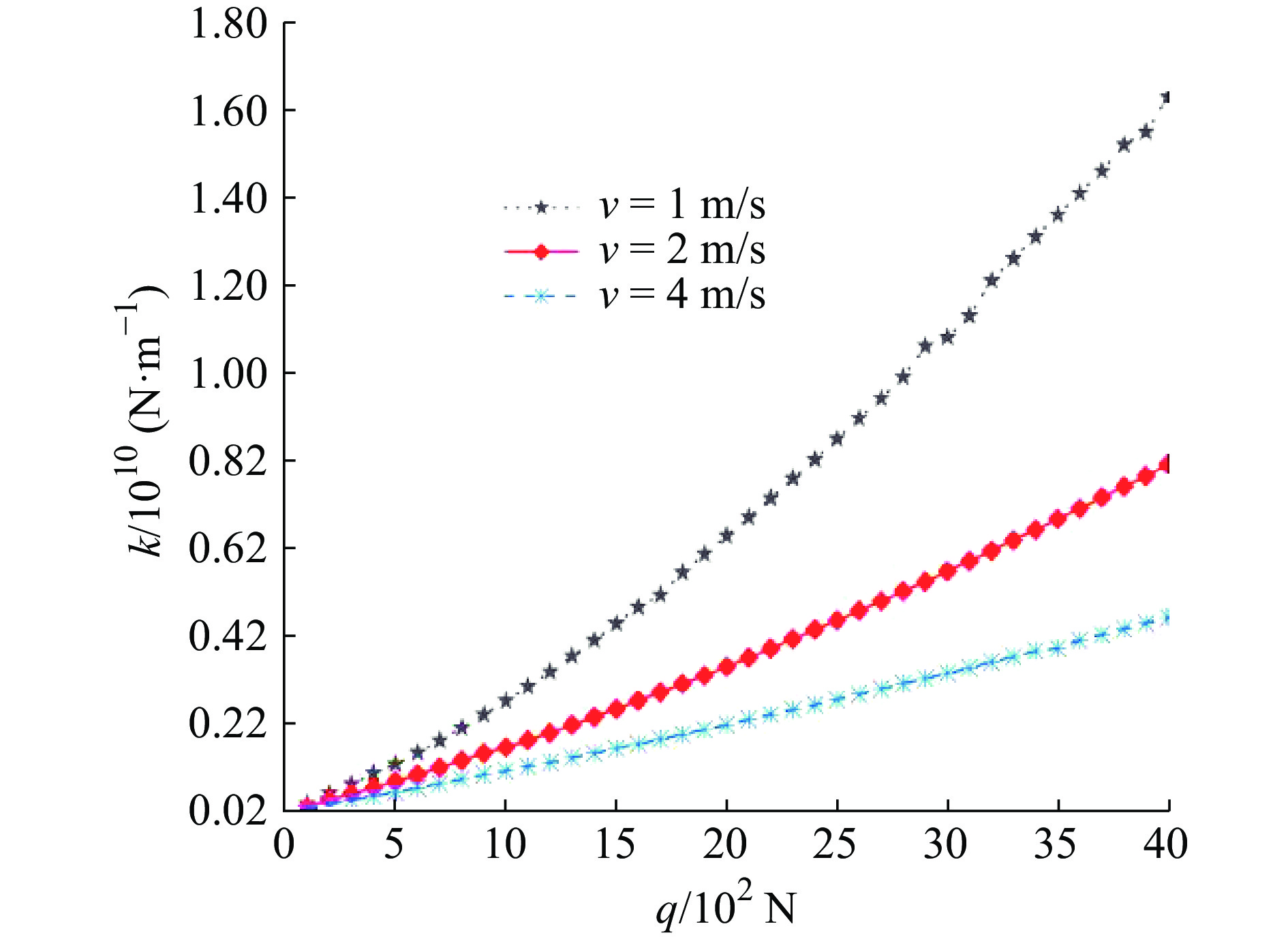
Based on the mechanical vibration and EHL theory, the EHL oil film was simplified as the spring damping. The tribological and dynamic coupling model for linear contact friction pair was constructed. The vibration response of friction pair was solved by using the numerical method. The stiffness and damping of the friction pair were calculated by the damping ring of the system under harmonic excitation. The effects of the load and velocity on the dynamic characteristics of friction pairs were analyzed. The results show that the EHL film has remarkable stiffness and damping characteristics. In the EHL state, when the velocity is constant, the stiffness and damping of friction pair increase linearly with the increasing of load. When the load is constant, the stiffness and damping of friction pair decrease exponentially with the increasing of velocity.
Based on the mechanical vibration and EHL theory, the EHL oil film was simplified as the spring damping. The tribological and dynamic coupling model for linear contact friction pair was constructed. The vibration response of friction pair was solved by using the numerical method. The stiffness and damping of the friction pair were calculated by the damping ring of the system under harmonic excitation. The effects of the load and velocity on the dynamic characteristics of friction pairs were analyzed. The results show that the EHL film has remarkable stiffness and damping characteristics. In the EHL state, when the velocity is constant, the stiffness and damping of friction pair increase linearly with the increasing of load. When the load is constant, the stiffness and damping of friction pair decrease exponentially with the increasing of velocity.






2021, 40(4): 500-507.
doi: 10.13433/j.cnki.1003-8728.20200082
Abstract:
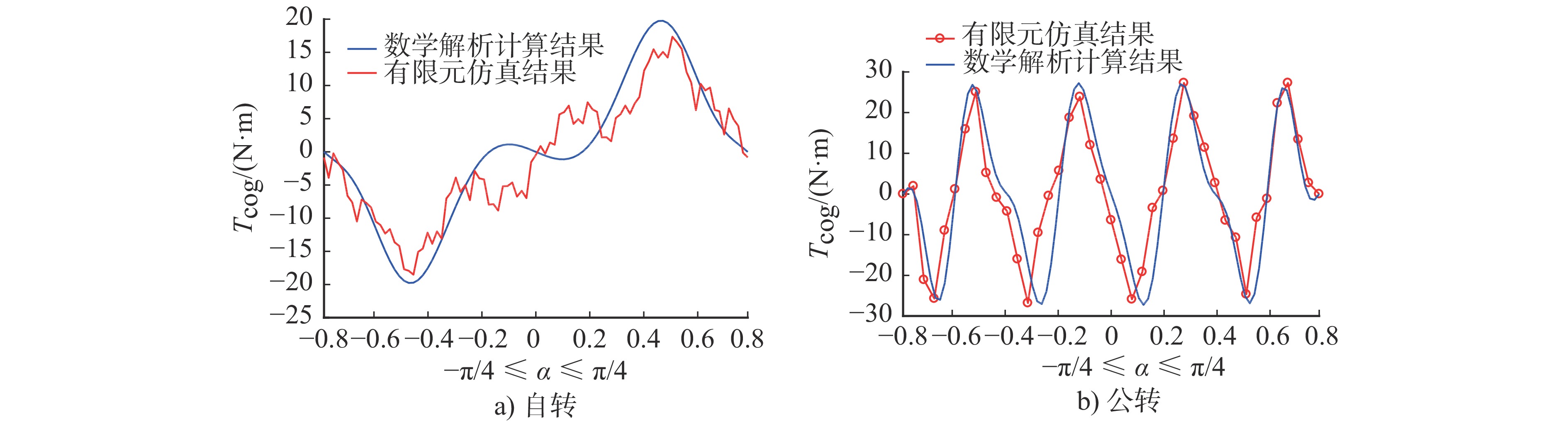
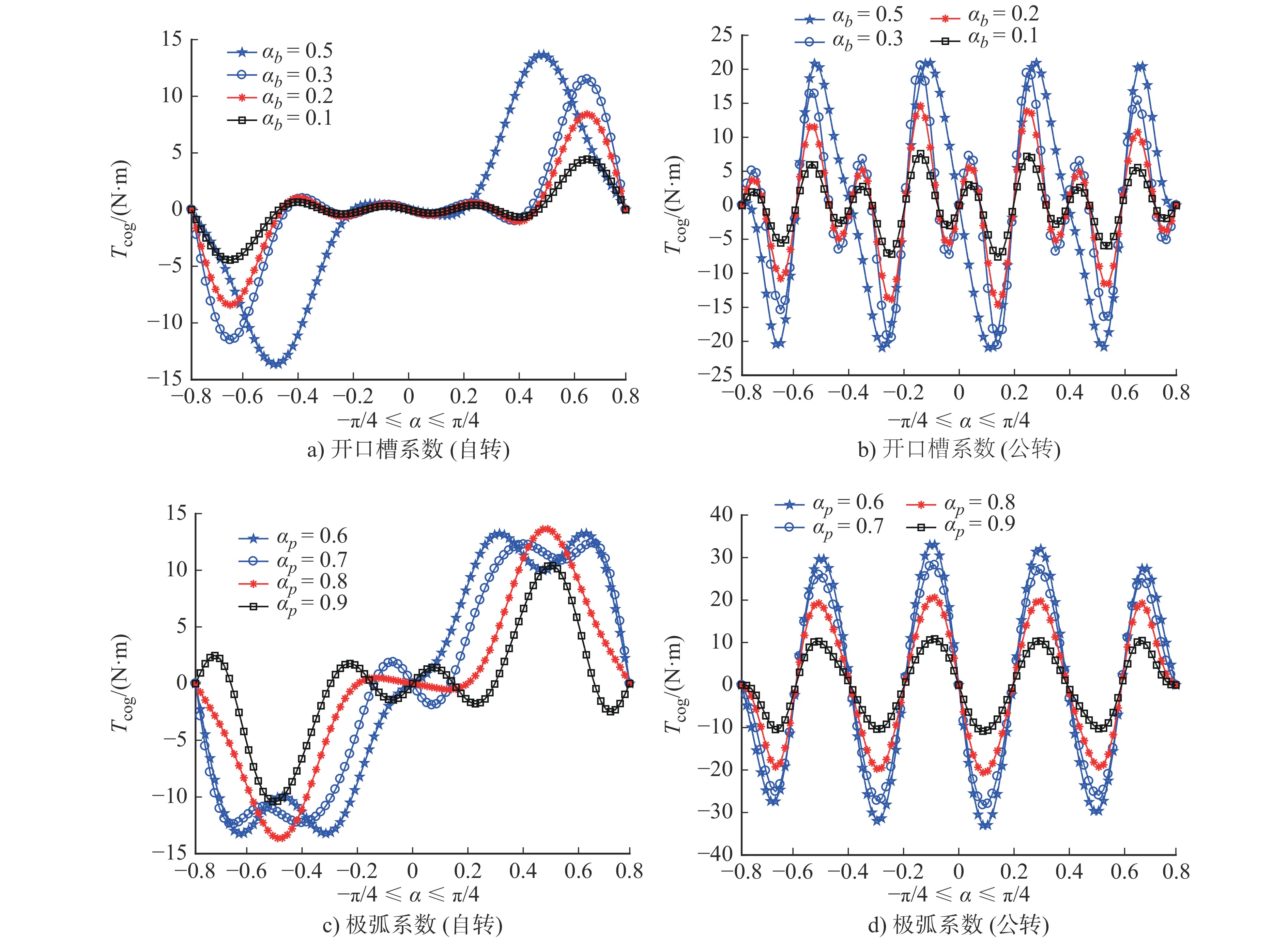
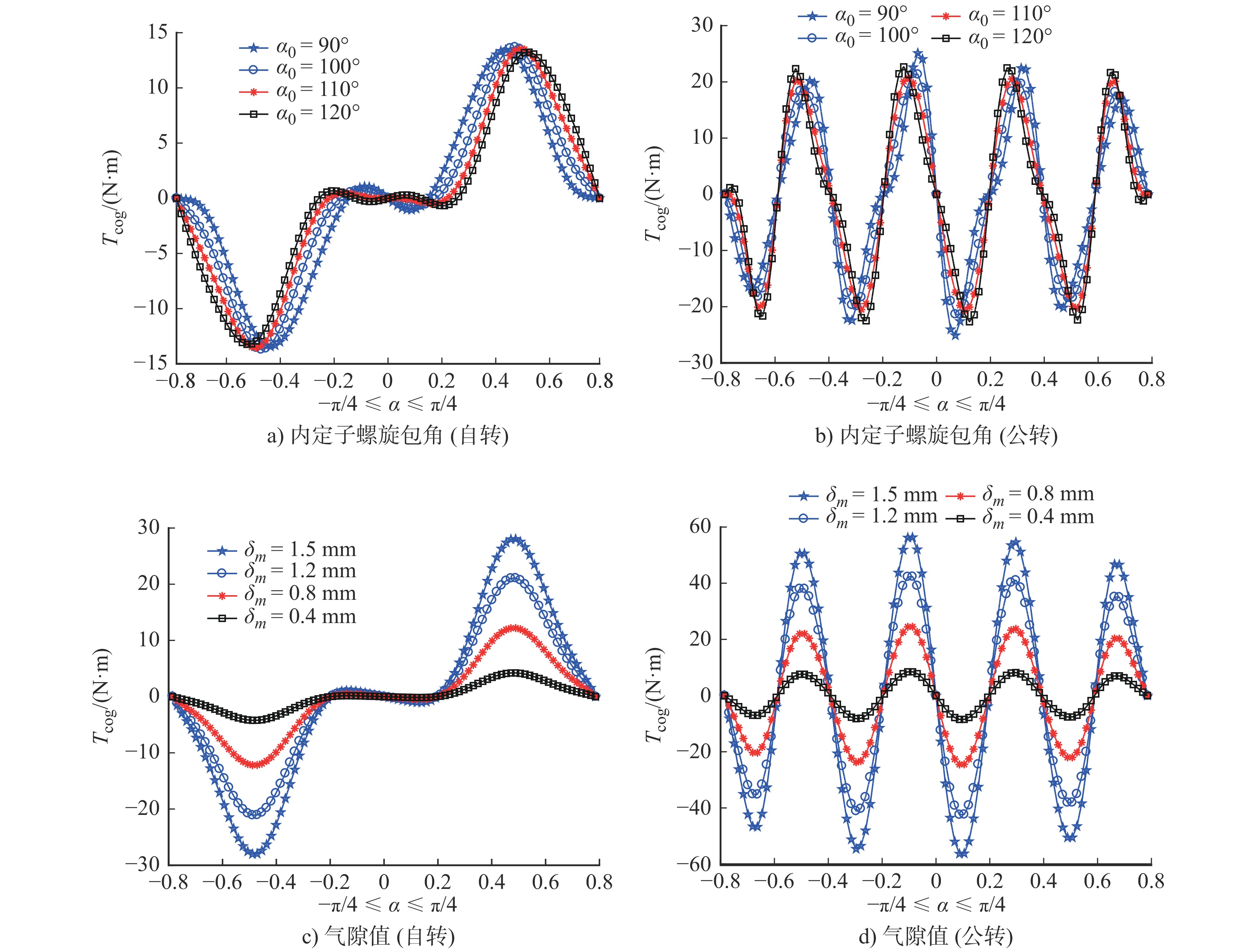
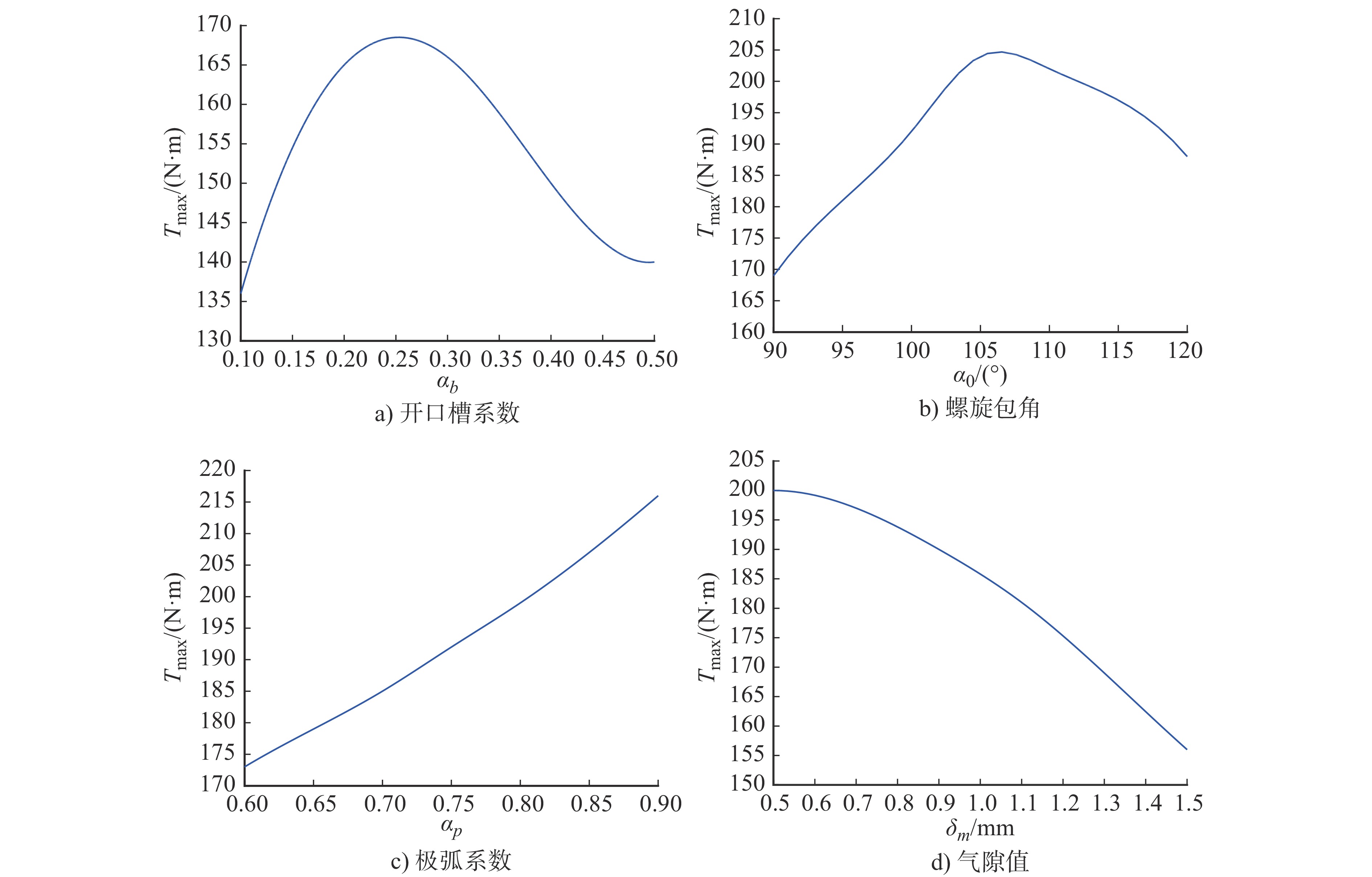
In order to reduce the cogging torque by optimizing its structural parameters, its cogging torque generation mechanism is discussed. According to the structural characteristics of the variable cross-sectionmotor, the cogging torquegeneration is divided into two directions: rotation and revolution. Mathematical models of cogging torque and output torque of the motor are established with the magnetic common energy method, and the finite element simulation is carried out to verify their validity and feasibility. Based on the mathematical models, the influence of structural parameters of the motor on the cogging torque reduction and the output torque amplitude is analyzed. The results show that the reasonable selection of the slot opening coefficient, polar arc coefficient and air gap value of the inner stator slot of the motor can reduce the slot torque fluctuation and increase the output torque amplitude, and effectively improve the output performance of the permanent magnet toroidal motor
In order to reduce the cogging torque by optimizing its structural parameters, its cogging torque generation mechanism is discussed. According to the structural characteristics of the variable cross-sectionmotor, the cogging torquegeneration is divided into two directions: rotation and revolution. Mathematical models of cogging torque and output torque of the motor are established with the magnetic common energy method, and the finite element simulation is carried out to verify their validity and feasibility. Based on the mathematical models, the influence of structural parameters of the motor on the cogging torque reduction and the output torque amplitude is analyzed. The results show that the reasonable selection of the slot opening coefficient, polar arc coefficient and air gap value of the inner stator slot of the motor can reduce the slot torque fluctuation and increase the output torque amplitude, and effectively improve the output performance of the permanent magnet toroidal motor




2021, 40(4): 508-517.
doi: 10.13433/j.cnki.1003-8728.20200096
Abstract:
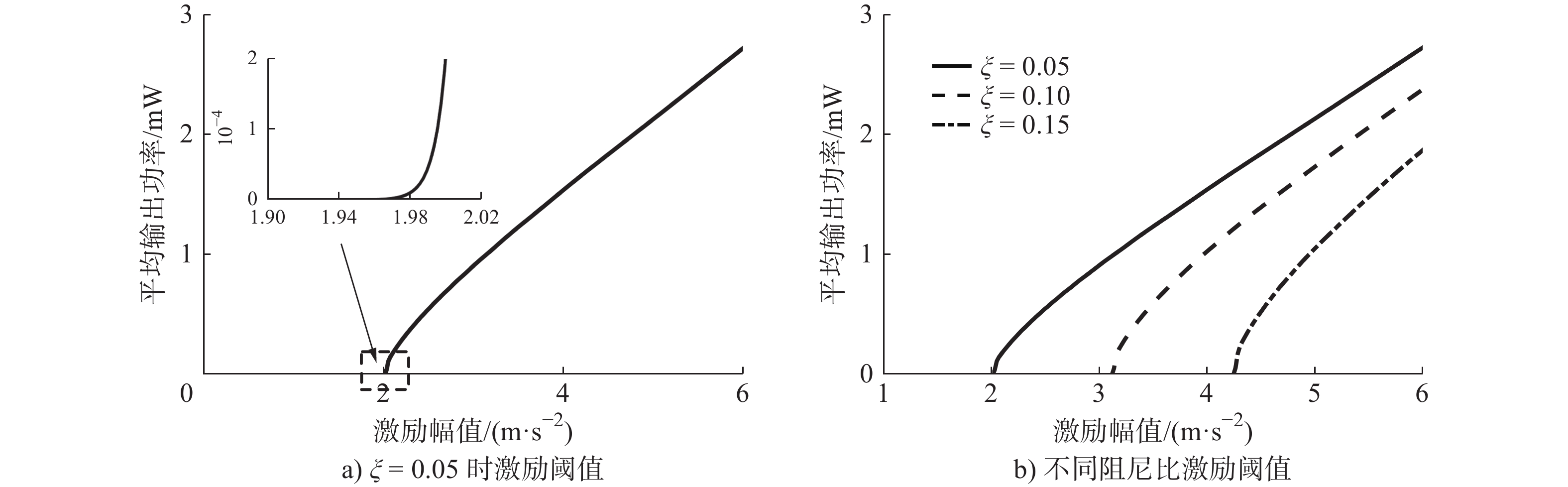
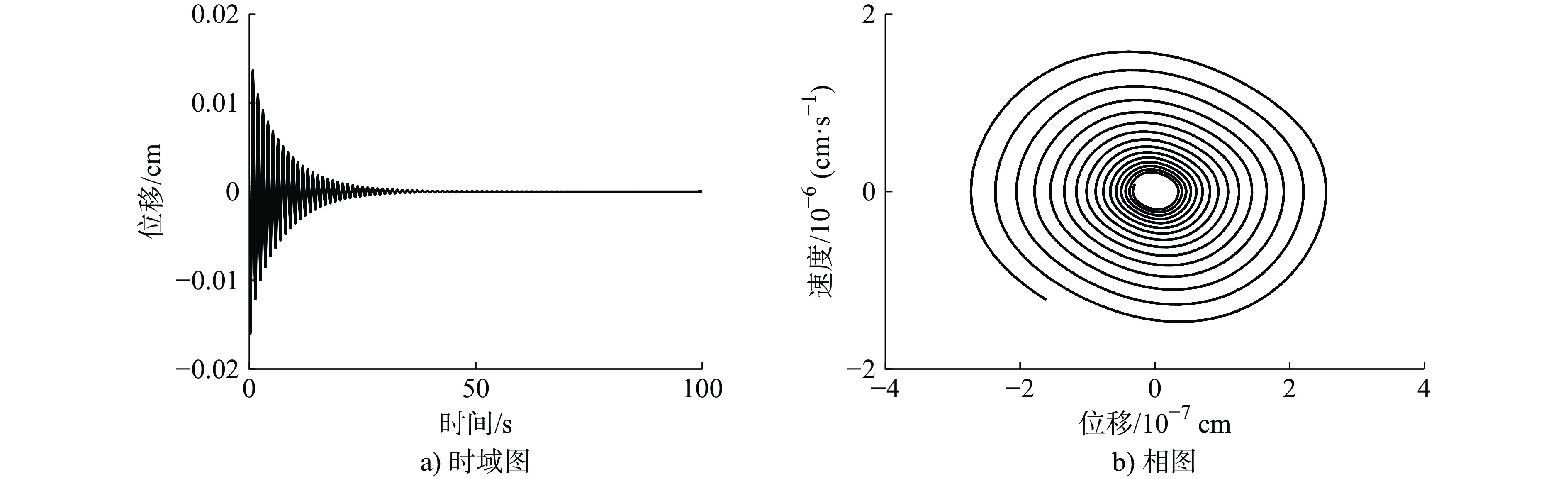
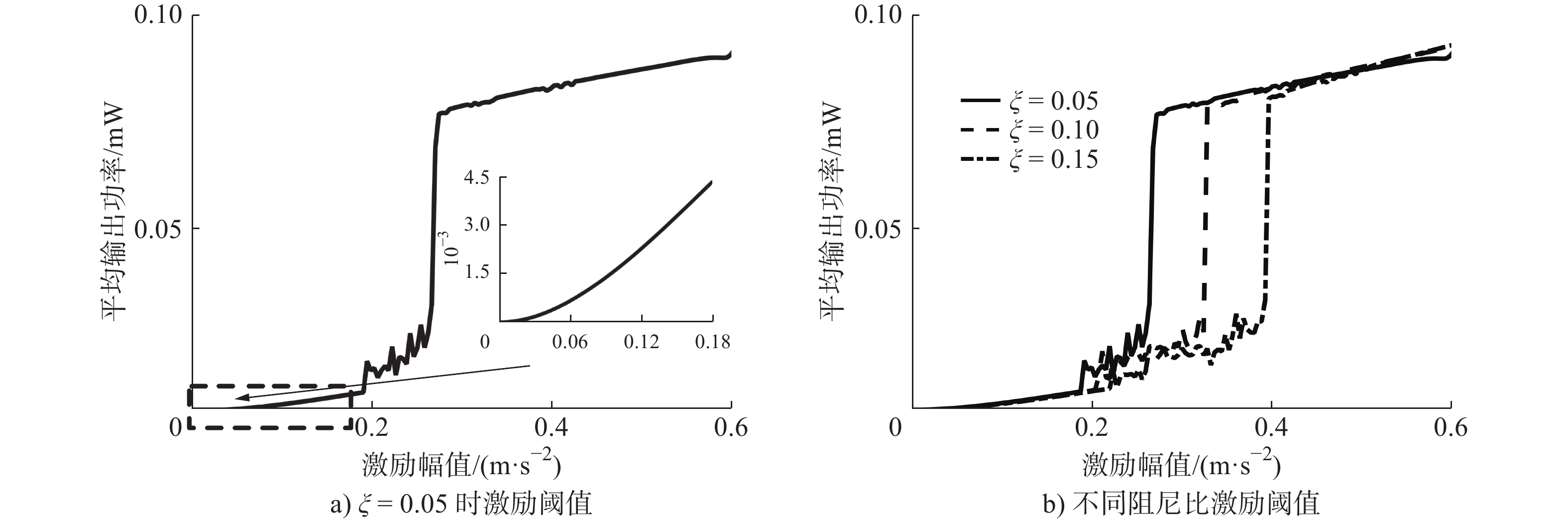
In order to improve the harvesting behaviors of parametric resonance piezoelectric energy harvester, it is proposed to install a mass block at the end of vertical cantilevered beam. Based on the Lagrange equation and Gauss law, the coupling equation between the mechanical system and electric system of energy harvester is derived and numerical simulations of its dynamic characteristics are carried out. The critical end mass Mc of the beam from monostable system into bistable system is 0.0509 kg. When the damping ratio of beam is 0.05 and the end mass increases from 0 to Mc, the excitation threshold of occurring parametric resonance will decrease from 47.5 m/s2 to 0. When the end mass M is larger than Mc, the excitation threshold is zero for any damping ratio of the beam, and the output of harvesting energy would be higher only when the cantilever beam oscillates periodically between the two stable positions under the excitation with proper amplitude and frequency.
In order to improve the harvesting behaviors of parametric resonance piezoelectric energy harvester, it is proposed to install a mass block at the end of vertical cantilevered beam. Based on the Lagrange equation and Gauss law, the coupling equation between the mechanical system and electric system of energy harvester is derived and numerical simulations of its dynamic characteristics are carried out. The critical end mass Mc of the beam from monostable system into bistable system is 0.0509 kg. When the damping ratio of beam is 0.05 and the end mass increases from 0 to Mc, the excitation threshold of occurring parametric resonance will decrease from 47.5 m/s2 to 0. When the end mass M is larger than Mc, the excitation threshold is zero for any damping ratio of the beam, and the output of harvesting energy would be higher only when the cantilever beam oscillates periodically between the two stable positions under the excitation with proper amplitude and frequency.








2021, 40(4): 518-526.
doi: 10.13433/j.cnki.1003-8728.20200101
Abstract:
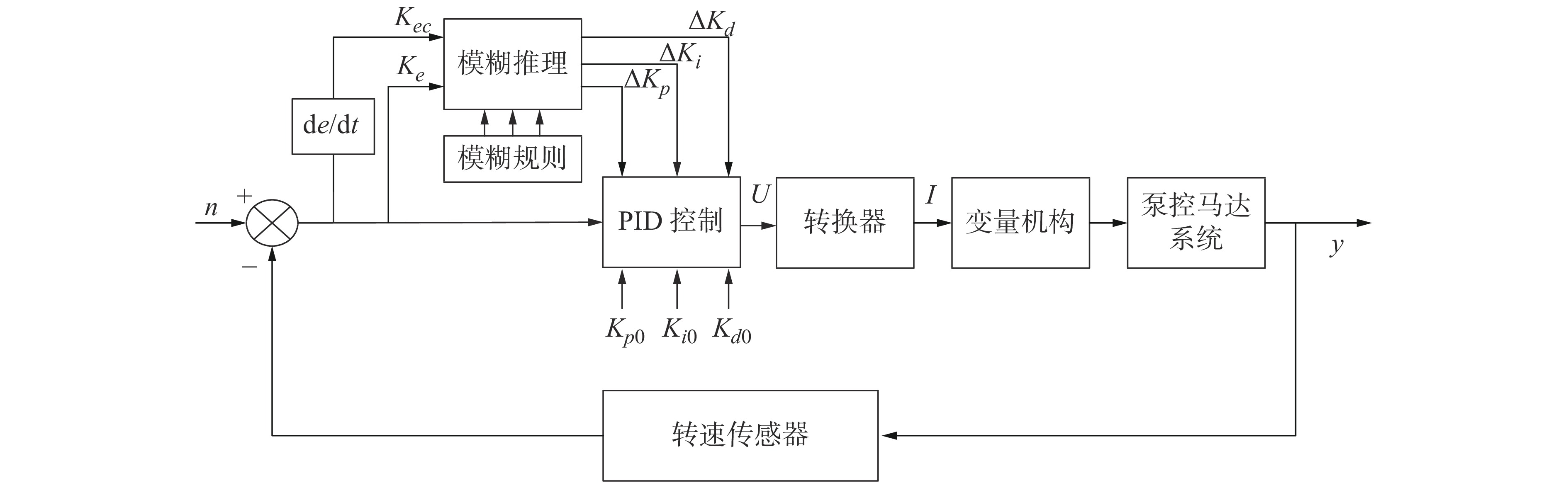
In order to solve the response delay of the motor during the actual driving process of the tractor, resulting in the speed of the tractor under various working conditions is not optimal, a speed tracking controller of hydraulic mechanical continuously variable transmission (HMCVT) pump-controlled motor system was designed to realize the motor speed track in real time. At first, the mathematical model of HMCVT pump-controlled motor system was established, and a fuzzy PID controller was employed to control the motor speed in real time. Then, a method based on improved particle swarm optimization algorithm was used to optimize the parameters of fuzzy PID controller. At last, according to the optimal optimization coefficient, a simulation model of HMCVT pump-controlled motor system was built in MATLAB / Simulink and relevant simulations were performed. The simulation results show that the optimized fuzzy PID controller can well implement the tracking control of the motor speed, the tracking error and the overshoot are small, and the system is well followed by the external load disturbance. The research results provide a theoretical reference for the development of an in-segment control strategy for the best fuel economy and best power of the tractor HMCVT.
In order to solve the response delay of the motor during the actual driving process of the tractor, resulting in the speed of the tractor under various working conditions is not optimal, a speed tracking controller of hydraulic mechanical continuously variable transmission (HMCVT) pump-controlled motor system was designed to realize the motor speed track in real time. At first, the mathematical model of HMCVT pump-controlled motor system was established, and a fuzzy PID controller was employed to control the motor speed in real time. Then, a method based on improved particle swarm optimization algorithm was used to optimize the parameters of fuzzy PID controller. At last, according to the optimal optimization coefficient, a simulation model of HMCVT pump-controlled motor system was built in MATLAB / Simulink and relevant simulations were performed. The simulation results show that the optimized fuzzy PID controller can well implement the tracking control of the motor speed, the tracking error and the overshoot are small, and the system is well followed by the external load disturbance. The research results provide a theoretical reference for the development of an in-segment control strategy for the best fuel economy and best power of the tractor HMCVT.












2021, 40(4): 527-533.
doi: 10.13433/j.cnki.1003-8728.20200249
Abstract:
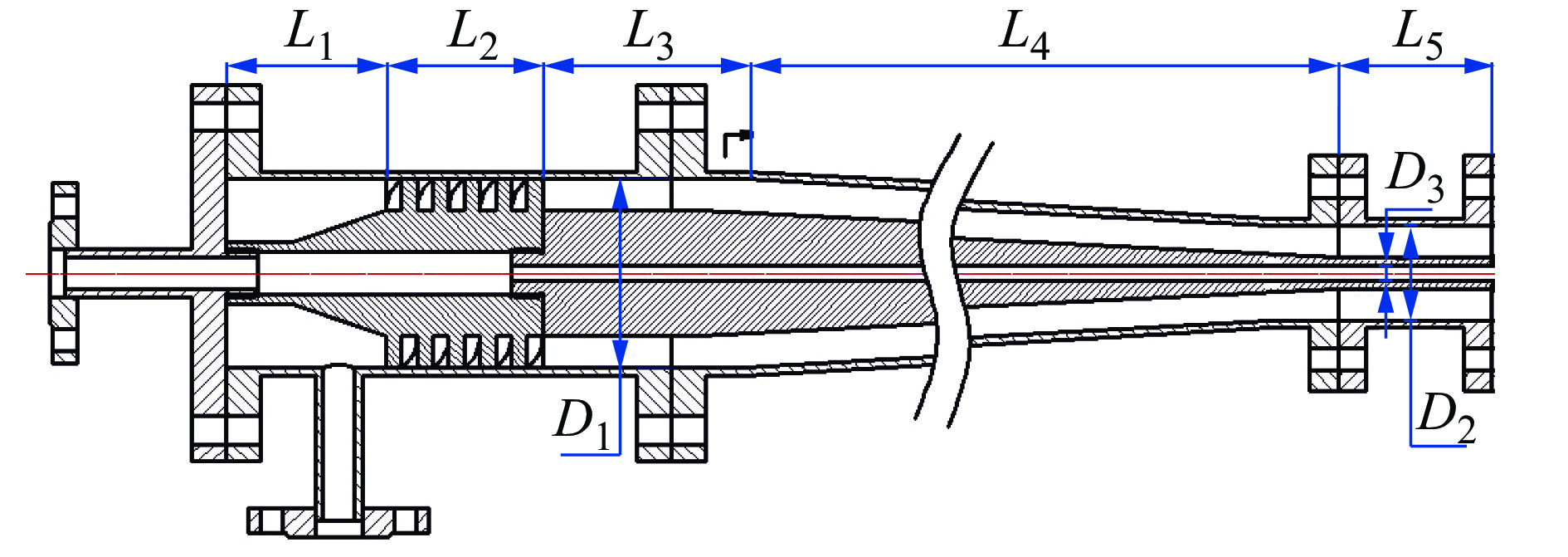
In order to enhance the separation performance of the hydrocyclone for small particle size oil droplets , based on the principle of cyclone separation, a new type hydraulic coalescer is proposed, which can make small oil droplets collide and coalesce by increasing the probability of collision between oil droplets. The main structural parameters of the hydraulic coalescer are optimized by orthogonal experimental method, and the effects of structural parameters of hydraulic coalescer on oil droplet distribution and coalescence performance are simulated by combining Euler-Euler model with the population balance model. The influence rule of structural parameters on the coalescence performance of oil droplet particle size distribution in the coalescer is analyzed, and the optimal structural parameters are obtained. The results show that the diameter of coalescence core D3, conical length L4 and outlet pipe length L5 of the coalescer all affect the size distribution of oil droplets in the coalescer, and the influence degree of these parameters on the coalescence performance is successively D3>L4>L5. The optimal structural parameter experimental group is C3A2B2 (L4 = 600 mm, L5 = 100 mm, D3 = 10 mm). Under the optimal structural parameters, when the inlet oil droplet size distribution is 25 - 55 μm, the average size distribution of oil droplets coalesced by hydraulic coalescer increases to 524.7 μm, which is 48.56% higher than that of initial structure coalescer.
In order to enhance the separation performance of the hydrocyclone for small particle size oil droplets , based on the principle of cyclone separation, a new type hydraulic coalescer is proposed, which can make small oil droplets collide and coalesce by increasing the probability of collision between oil droplets. The main structural parameters of the hydraulic coalescer are optimized by orthogonal experimental method, and the effects of structural parameters of hydraulic coalescer on oil droplet distribution and coalescence performance are simulated by combining Euler-Euler model with the population balance model. The influence rule of structural parameters on the coalescence performance of oil droplet particle size distribution in the coalescer is analyzed, and the optimal structural parameters are obtained. The results show that the diameter of coalescence core D3, conical length L4 and outlet pipe length L5 of the coalescer all affect the size distribution of oil droplets in the coalescer, and the influence degree of these parameters on the coalescence performance is successively D3>L4>L5. The optimal structural parameter experimental group is C3A2B2 (L4 = 600 mm, L5 = 100 mm, D3 = 10 mm). Under the optimal structural parameters, when the inlet oil droplet size distribution is 25 - 55 μm, the average size distribution of oil droplets coalesced by hydraulic coalescer increases to 524.7 μm, which is 48.56% higher than that of initial structure coalescer.







2021, 40(4): 534-541.
doi: 10.13433/j.cnki.1003-8728.20200099
Abstract:
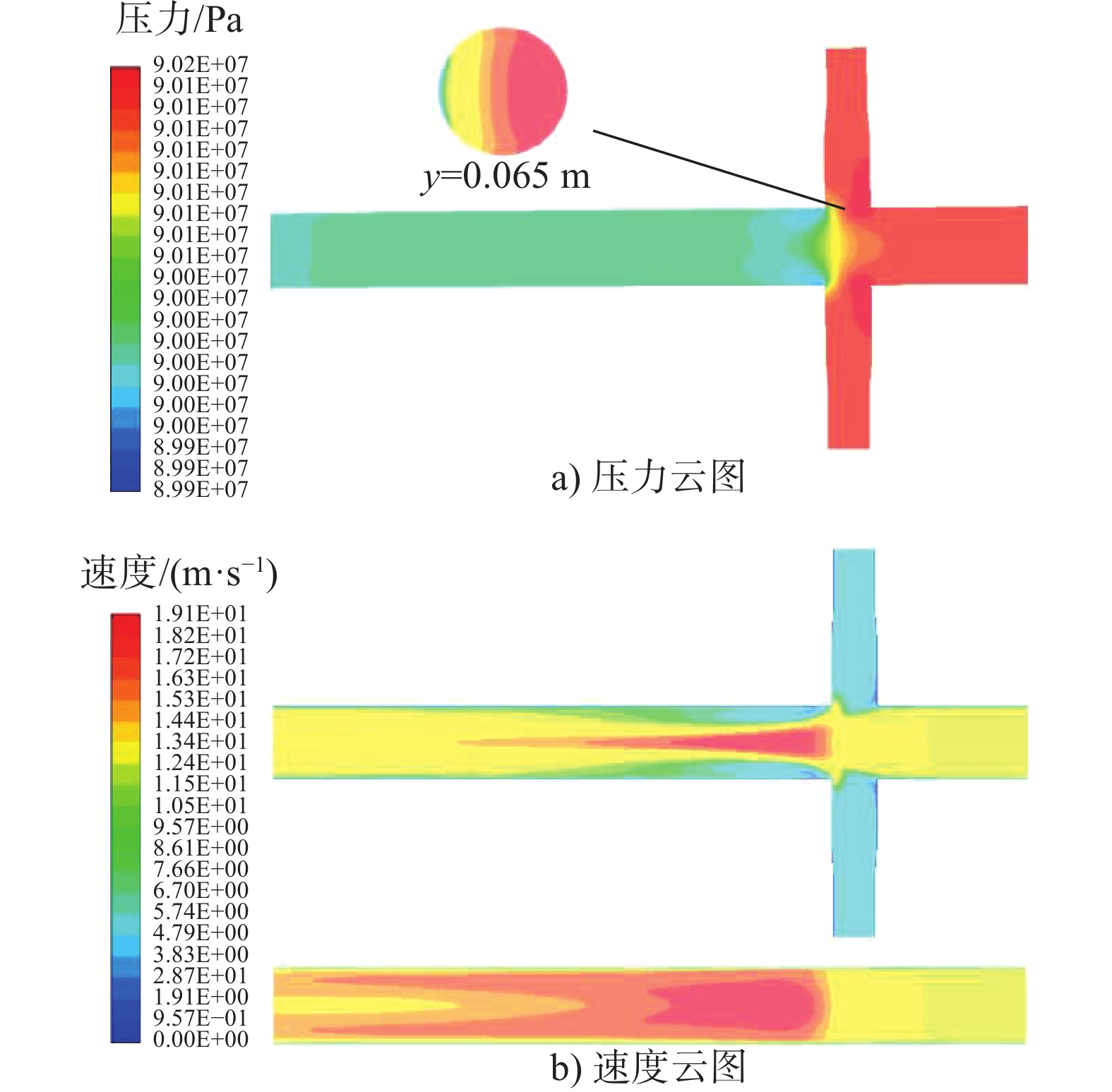
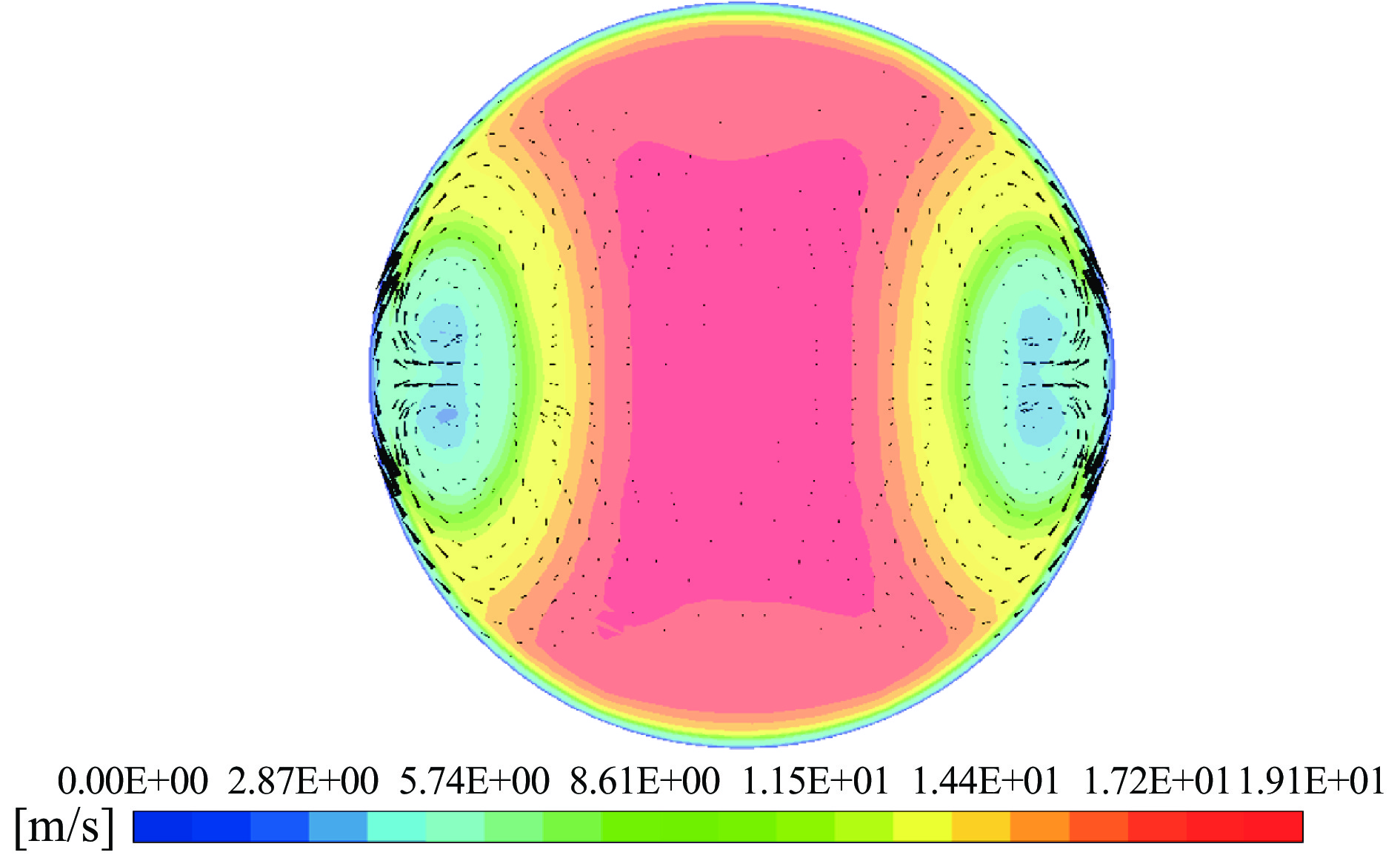
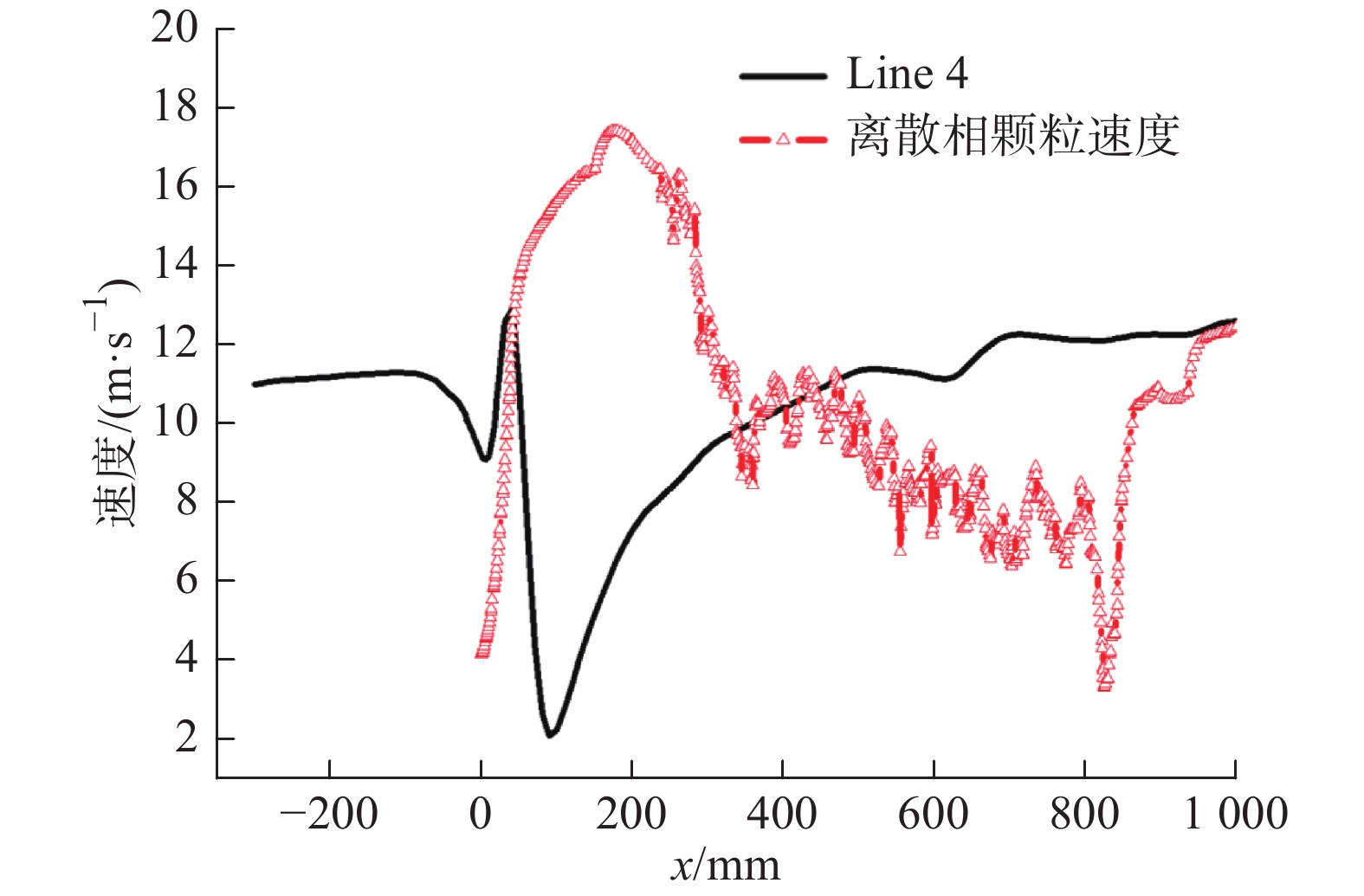
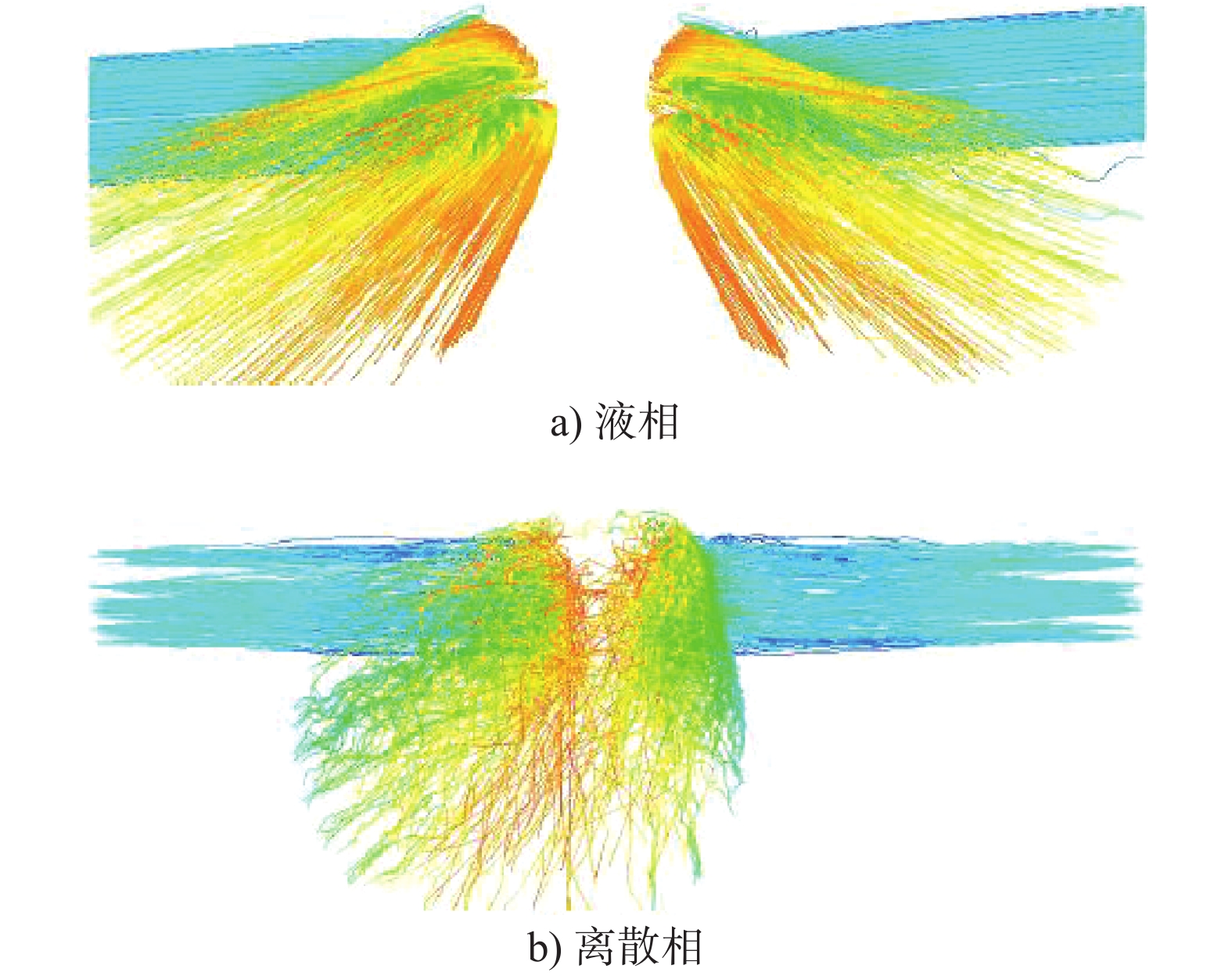
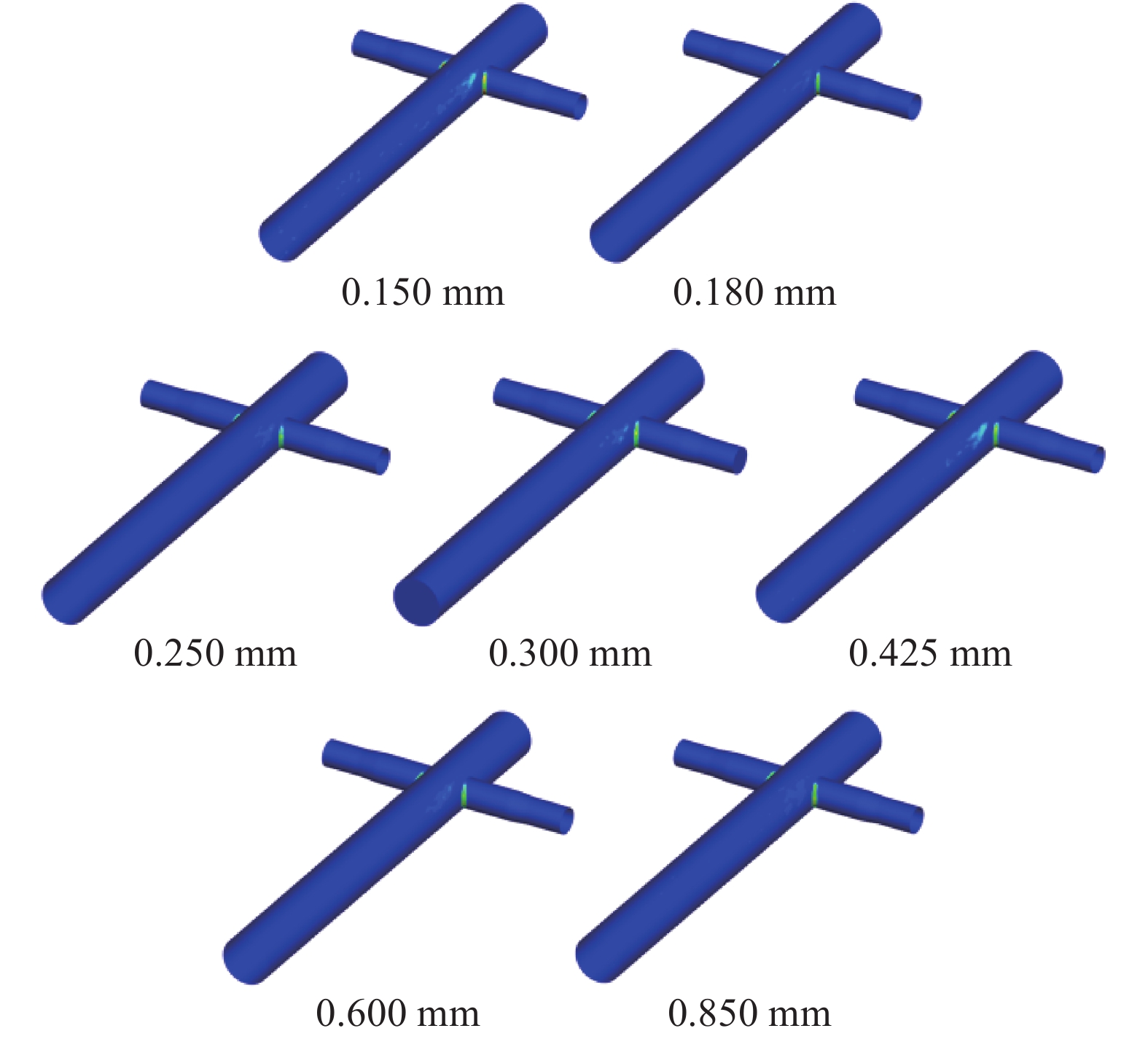
In the process of shale gas fracturing, a new type of high-pressure manifold quick-connection device is used in some well to improve the hydraulic fracturing efficiency. In order to study the erosion wear law of the cross-pipe in the device during hydraulic fracturing, the DPM erosion prediction model and FLUENT software are used in this analysis. The results showed that the erosion-concentration-area is mainly located on the intersecting lines and the pipe wall near them; When the mass flow is constant, the maximum erosion rate on the interseciting lines decreases exponentially with the increase of particle size, and the maximum erosion rate on the pipe wall first increases and then decreases; When the mass flow is constant, the maximum erosion rate increases with the increase of viscosity. And the law of maximum erosion rate changing with viscosity changes from the logarithmic type to exponential type with the increase of particle size at the same time.
In the process of shale gas fracturing, a new type of high-pressure manifold quick-connection device is used in some well to improve the hydraulic fracturing efficiency. In order to study the erosion wear law of the cross-pipe in the device during hydraulic fracturing, the DPM erosion prediction model and FLUENT software are used in this analysis. The results showed that the erosion-concentration-area is mainly located on the intersecting lines and the pipe wall near them; When the mass flow is constant, the maximum erosion rate on the interseciting lines decreases exponentially with the increase of particle size, and the maximum erosion rate on the pipe wall first increases and then decreases; When the mass flow is constant, the maximum erosion rate increases with the increase of viscosity. And the law of maximum erosion rate changing with viscosity changes from the logarithmic type to exponential type with the increase of particle size at the same time.









2021, 40(4): 542-547.
doi: 10.13433/j.cnki.1003-8728.20200291
Abstract:
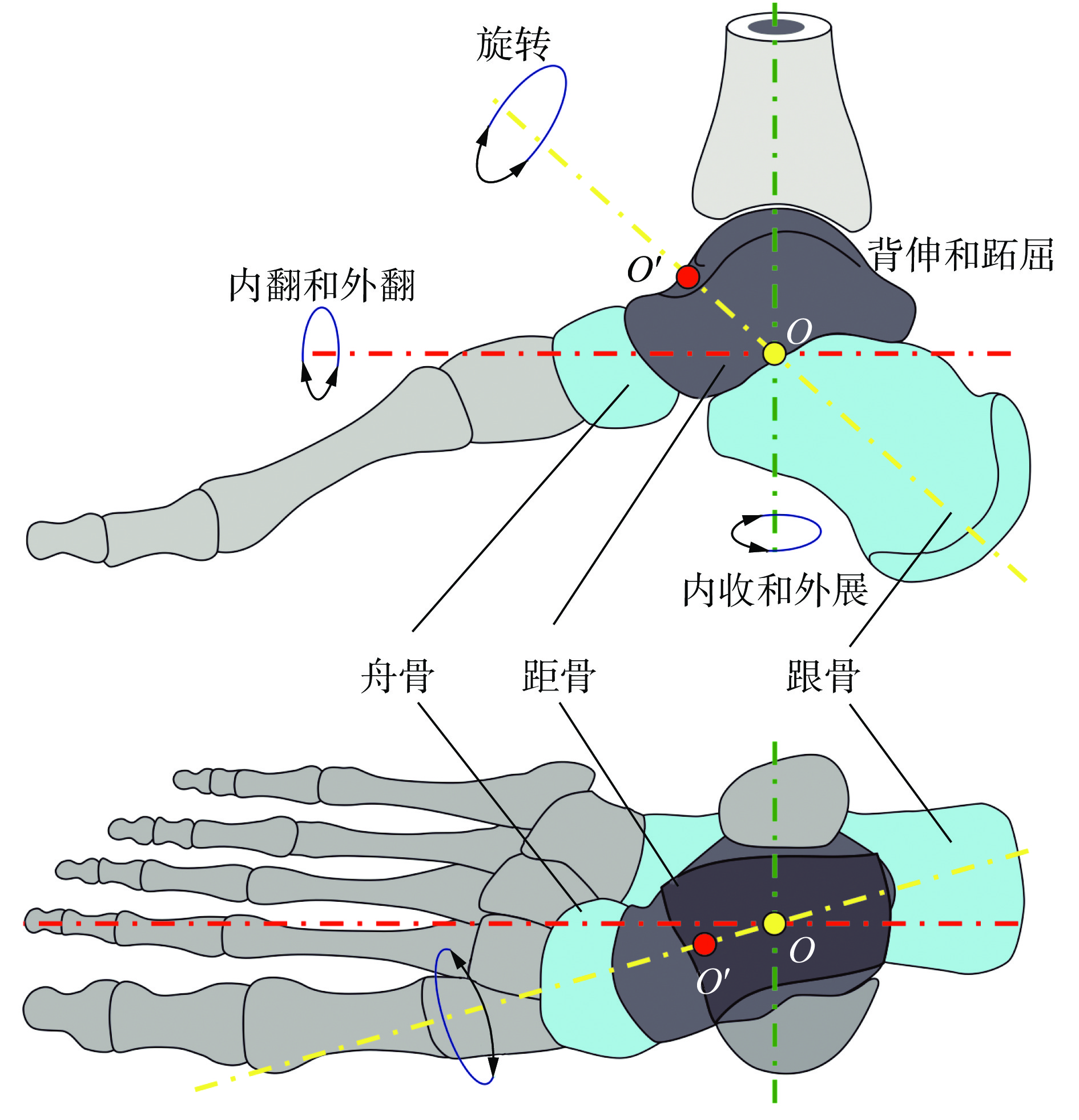
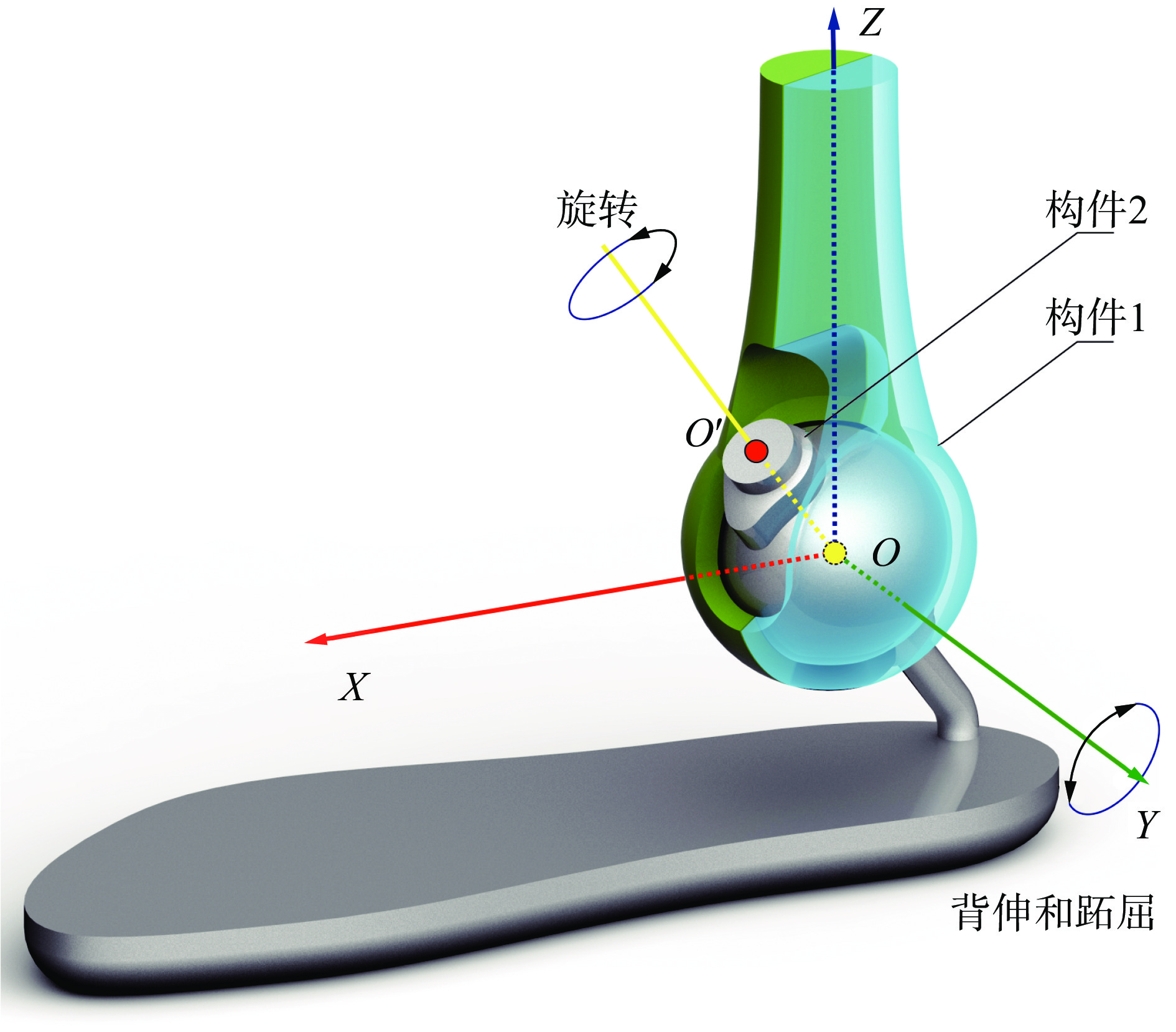
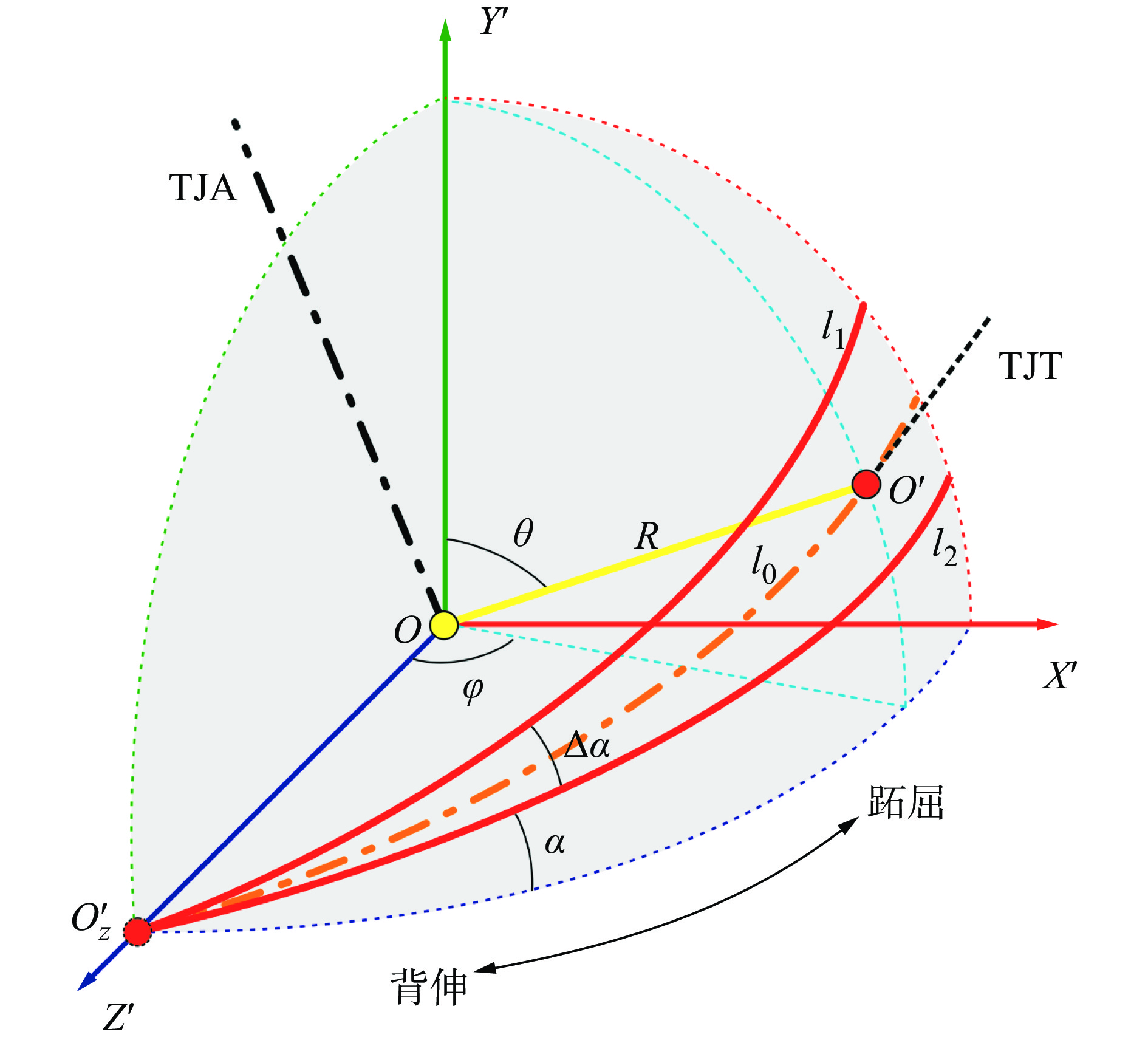
The foot and ankle are made up of many joints and the movement is composed of plantar flexion, dorsiflexion, adduction, abduction, inversion, eversion and so on. A model for describing the complex movement of foot and ankle joint is crucial to correctly understand the regular motion of the foot. This study constructed a kinematics model based on the movement mode of the supratalar and subtalar joints and the morphological characteristics of talus. Assuming that the trajectories of the subtalar joint axis conducted are spherical logarithmic helixes, a ball-and-socket combining with a hinge joint was adopted to simulate the motion and the foot movement is restricted by the morphological components design of the model. According to the related data in the references, the range of the parameters and the characteristic of the foot movement simulated by the model was discussed. A series parameters of the model were set and the angles output of foot were obtained. The motion capture of foot was carried out to collect the dynamic data of the foot. The comparison between the complex kinematics simulation and the detected data showed that the motion of the foot and ankle joint could be conveniently described by the present model.
The foot and ankle are made up of many joints and the movement is composed of plantar flexion, dorsiflexion, adduction, abduction, inversion, eversion and so on. A model for describing the complex movement of foot and ankle joint is crucial to correctly understand the regular motion of the foot. This study constructed a kinematics model based on the movement mode of the supratalar and subtalar joints and the morphological characteristics of talus. Assuming that the trajectories of the subtalar joint axis conducted are spherical logarithmic helixes, a ball-and-socket combining with a hinge joint was adopted to simulate the motion and the foot movement is restricted by the morphological components design of the model. According to the related data in the references, the range of the parameters and the characteristic of the foot movement simulated by the model was discussed. A series parameters of the model were set and the angles output of foot were obtained. The motion capture of foot was carried out to collect the dynamic data of the foot. The comparison between the complex kinematics simulation and the detected data showed that the motion of the foot and ankle joint could be conveniently described by the present model.




2021, 40(4): 548-555.
doi: 10.13433/j.cnki.1003-8728.20200094
Abstract:
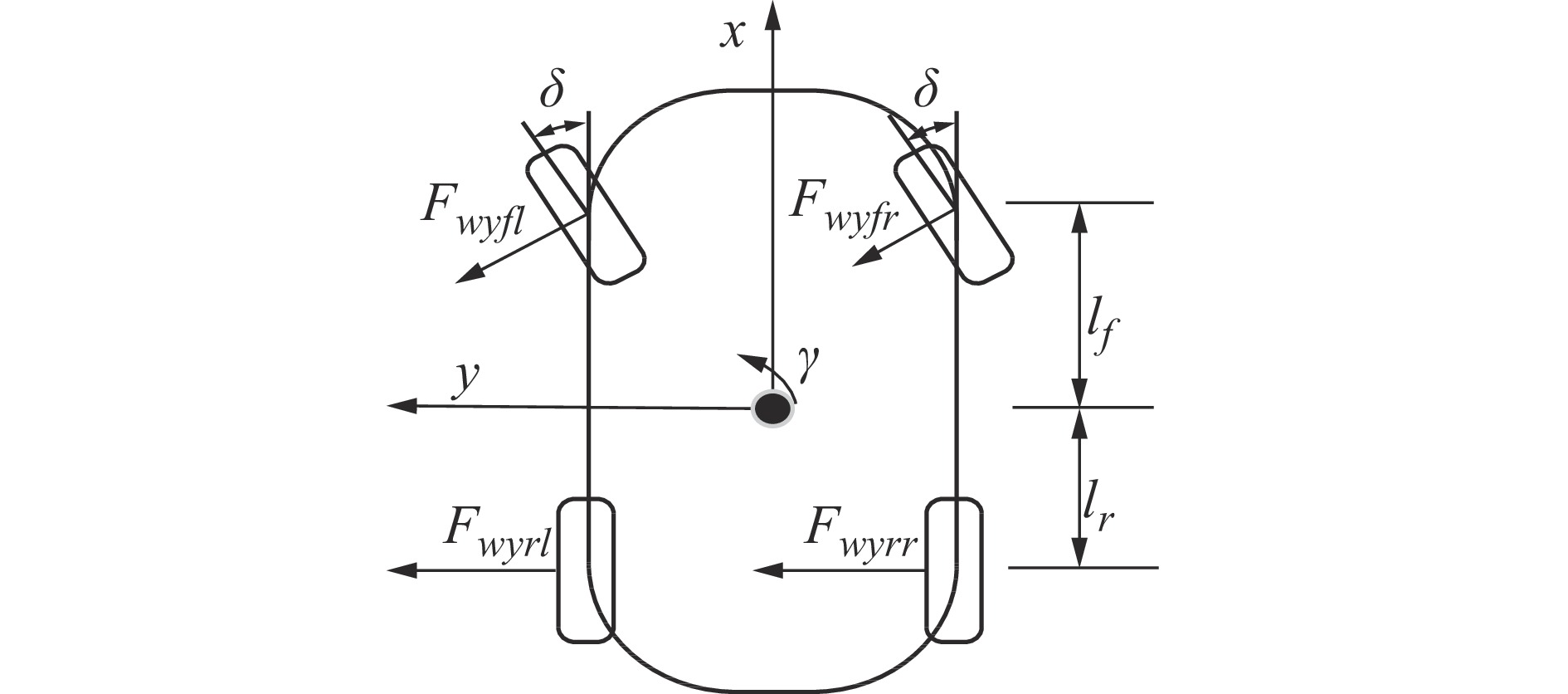
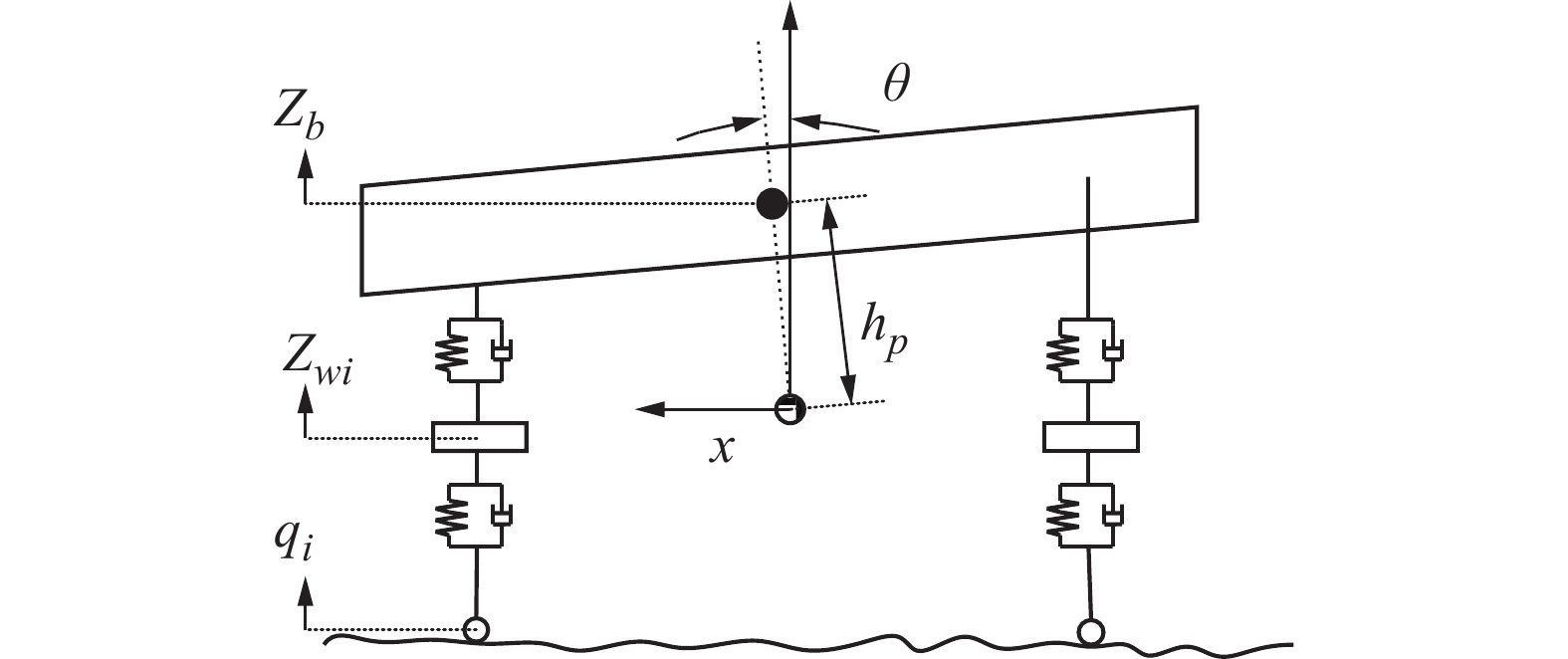
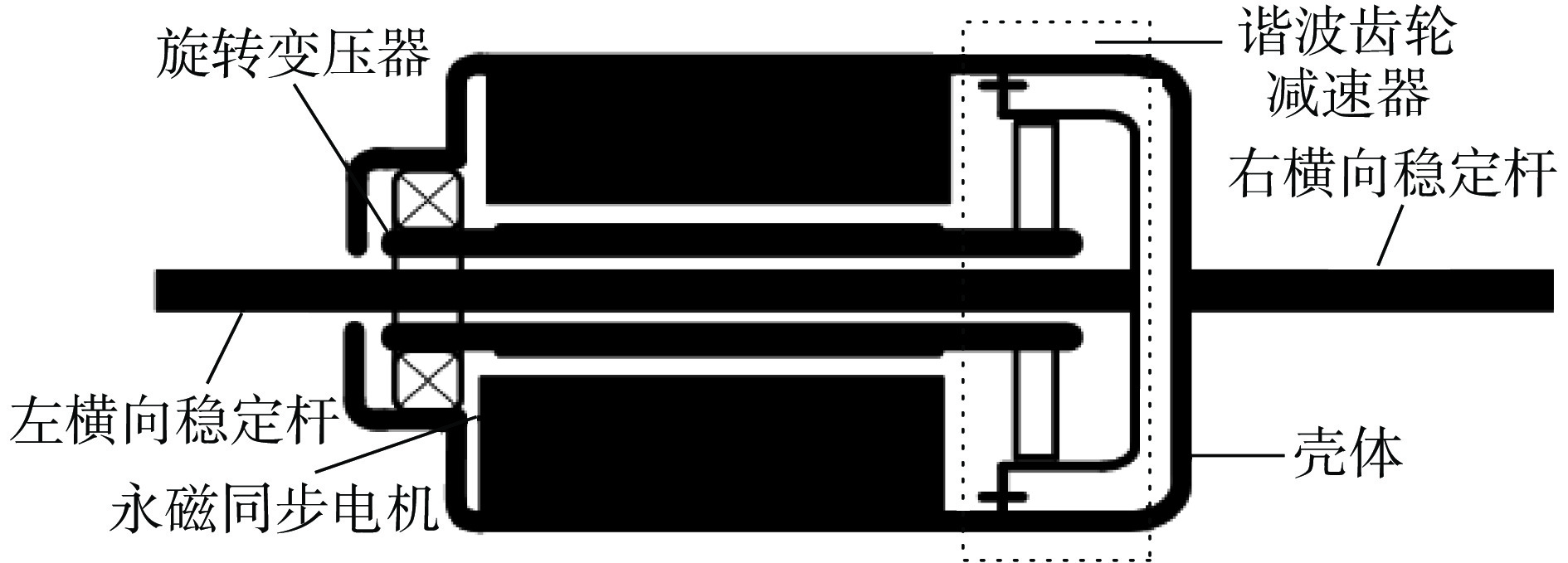
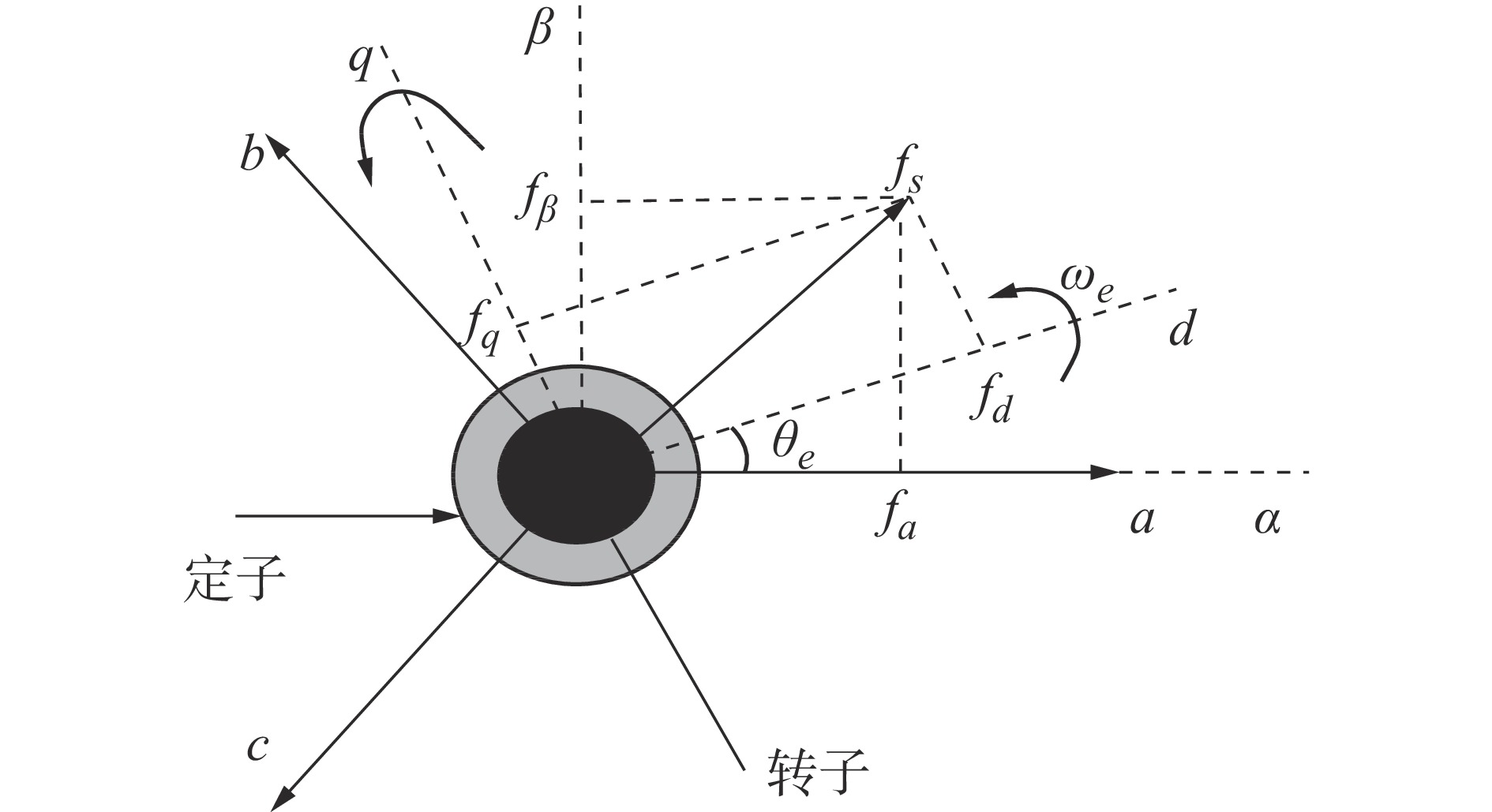
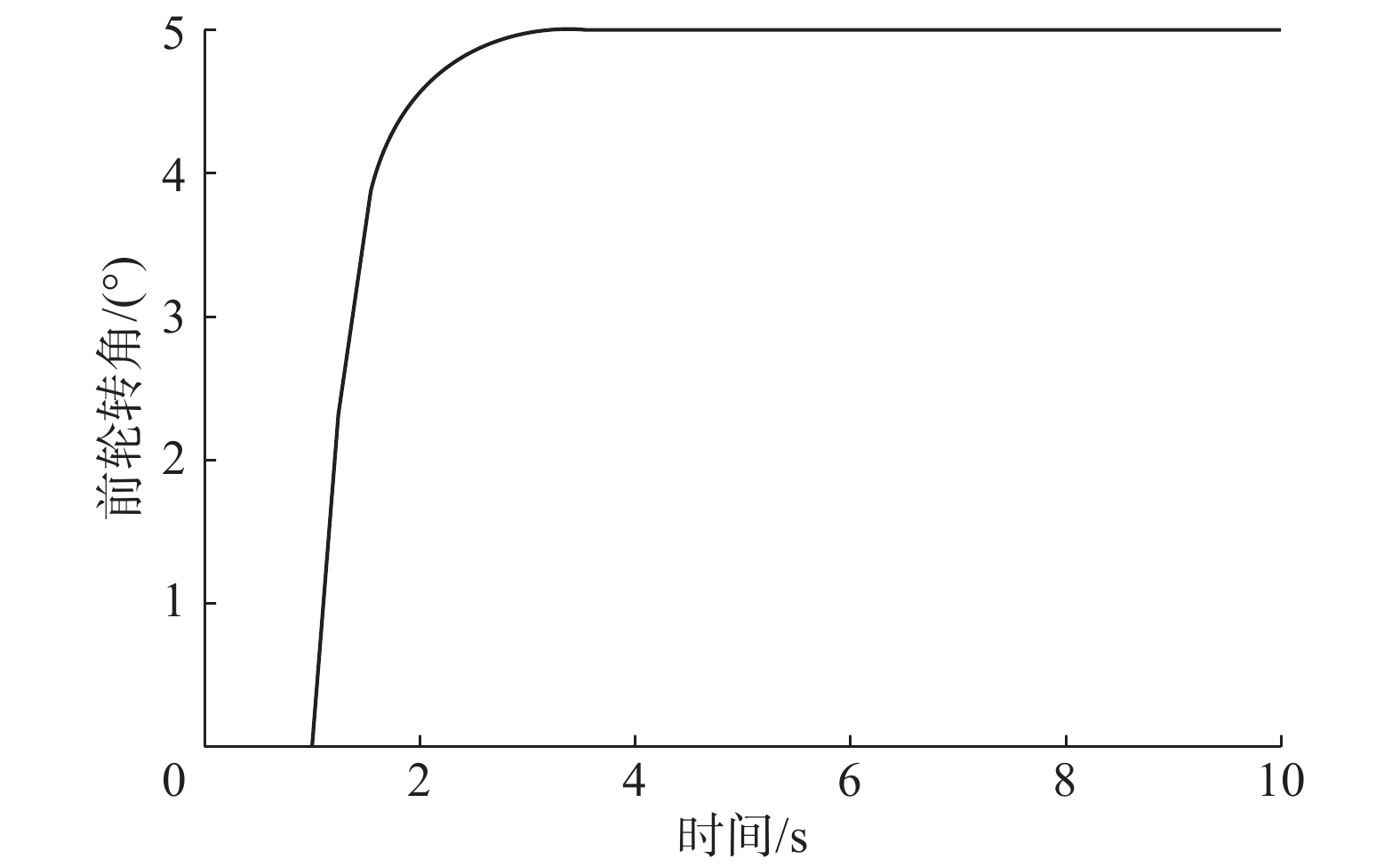
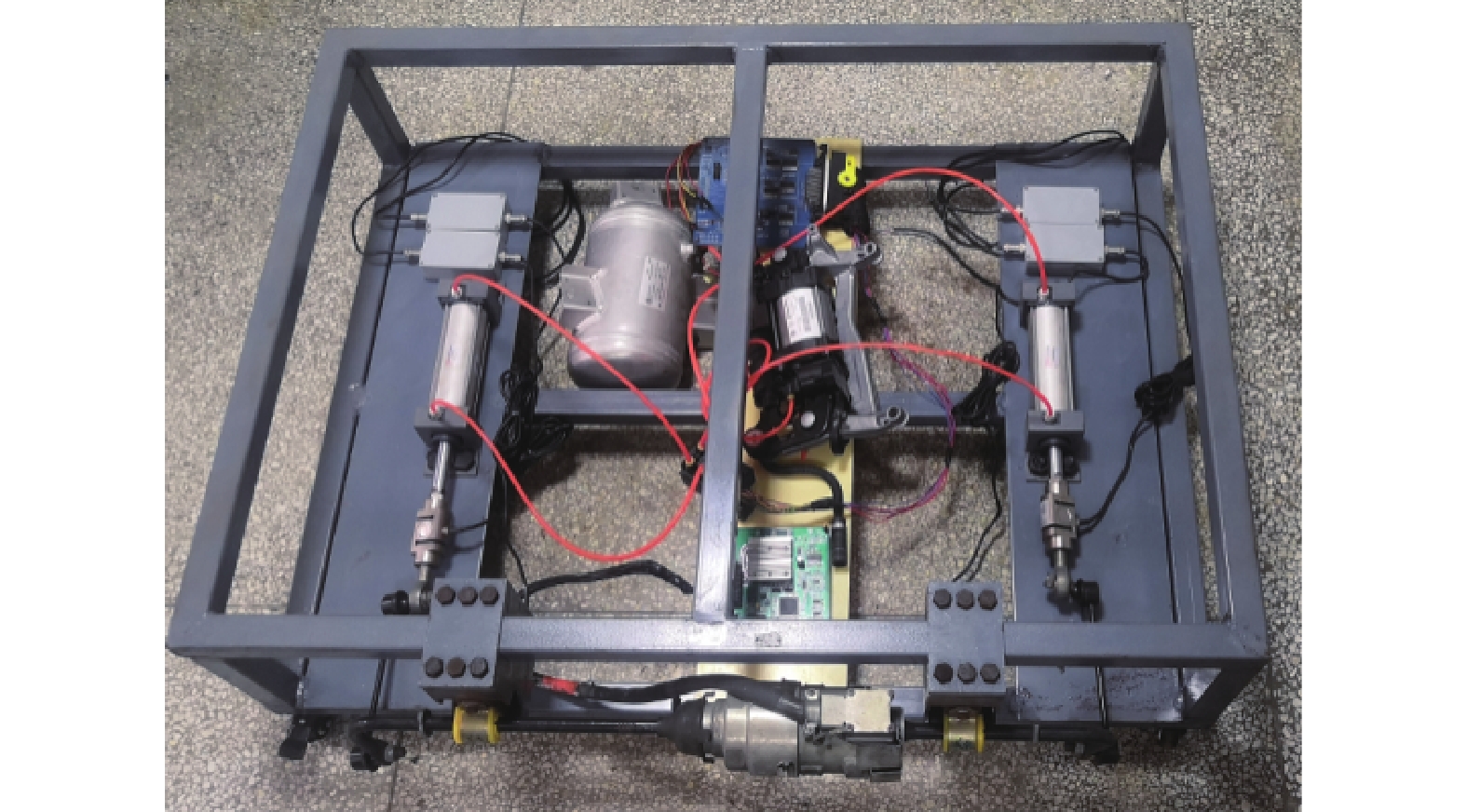
In order to further improve the roll stability of high-speed vehicles, the model predictive controller and its electronic control unit of the active anti-roll stabilizer based on a permanent magnet synchronous motor (PMSM) are designed, and the related off-line and hardware-in-the-loop performance tests are conducted in this paper. Firstly, a nine-degree-of-freedom vehicle dynamics model is built with MATLAB/Simulink, and a model predictive control method is applied to build the control strategy model of the electric active anti-roll stabilizer. Then, the electronic control unit of the electric active anti-roll stabilizer based on the Infineon 32-bit Tricore 275 control chip is designed. The validity of the model predictive control strategy of the electric active anti-rolla stabilizer is validated under the steering wheel angle step test and the fishhook test respectively with the developed test bench. The results of relevant simulation and bench test show that the model predictive control strategy of the electric active anti-roll stabilizer can effectively improve the anti-roll ability of the vehicle.
In order to further improve the roll stability of high-speed vehicles, the model predictive controller and its electronic control unit of the active anti-roll stabilizer based on a permanent magnet synchronous motor (PMSM) are designed, and the related off-line and hardware-in-the-loop performance tests are conducted in this paper. Firstly, a nine-degree-of-freedom vehicle dynamics model is built with MATLAB/Simulink, and a model predictive control method is applied to build the control strategy model of the electric active anti-roll stabilizer. Then, the electronic control unit of the electric active anti-roll stabilizer based on the Infineon 32-bit Tricore 275 control chip is designed. The validity of the model predictive control strategy of the electric active anti-rolla stabilizer is validated under the steering wheel angle step test and the fishhook test respectively with the developed test bench. The results of relevant simulation and bench test show that the model predictive control strategy of the electric active anti-roll stabilizer can effectively improve the anti-roll ability of the vehicle.












2021, 40(4): 556-561.
doi: 10.13433/j.cnki.1003-8728.20200100
Abstract:
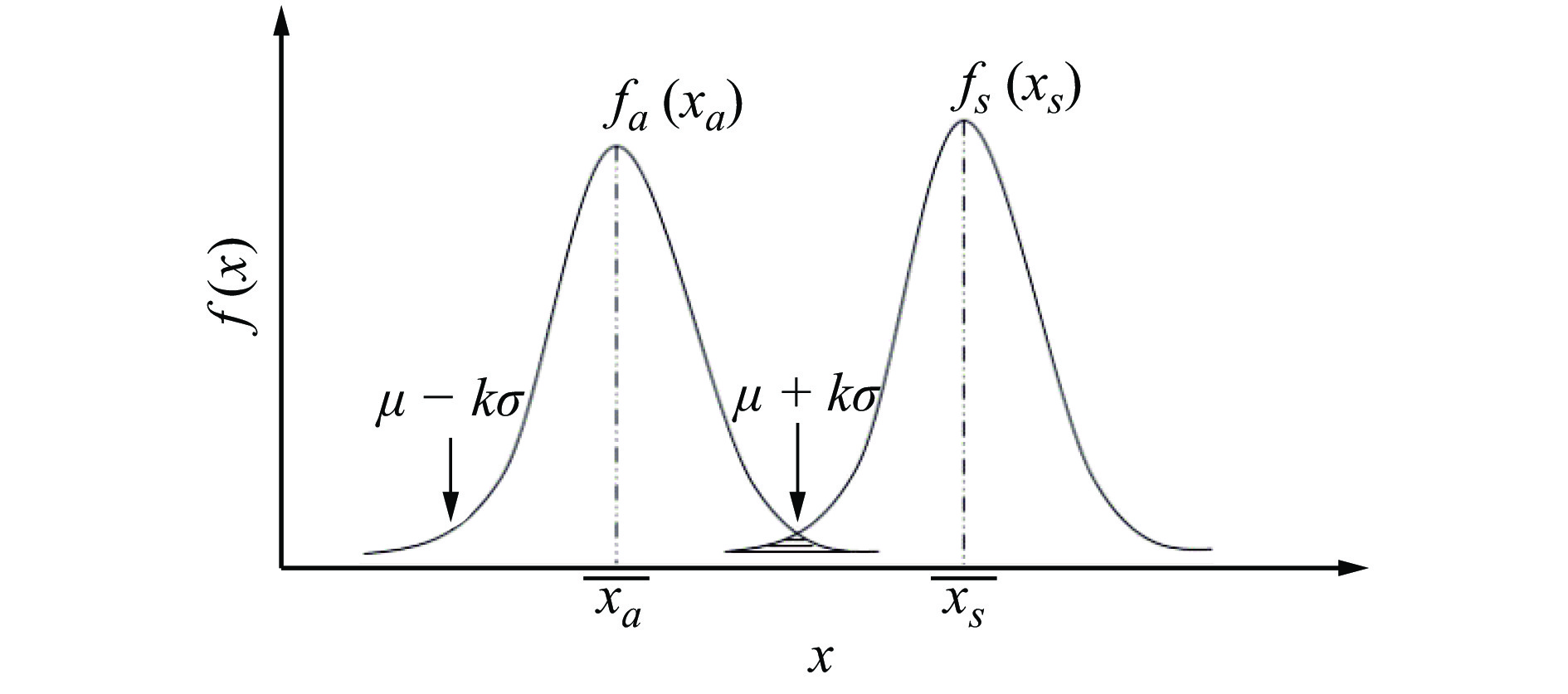
In order to quickly acquire the static strength and fatigue load data of a platform suspension, the front Macpherson suspensions of five type volume production vehicles of A-level car platform were selected as the research objects. Firstly, the wheel load amplitude of proving ground test of each type vehicle was statistically analyzed. Secondly, based on the stress-strength interference model, the strength load boundary of the suspension and its wheel load coefficient G were obtained. Thirdly, the fatigue load of the platform suspension was obtained based on the relation between wheel axle Pseudo damage and wheel load. This method can quickly obtain the static strength and fatigue load of the suspension of the same platform, eliminate the real vehicle road spectrum collection and improve the efficiency.
In order to quickly acquire the static strength and fatigue load data of a platform suspension, the front Macpherson suspensions of five type volume production vehicles of A-level car platform were selected as the research objects. Firstly, the wheel load amplitude of proving ground test of each type vehicle was statistically analyzed. Secondly, based on the stress-strength interference model, the strength load boundary of the suspension and its wheel load coefficient G were obtained. Thirdly, the fatigue load of the platform suspension was obtained based on the relation between wheel axle Pseudo damage and wheel load. This method can quickly obtain the static strength and fatigue load of the suspension of the same platform, eliminate the real vehicle road spectrum collection and improve the efficiency.



2021, 40(4): 562-565.
doi: 10.13433/j.cnki.1003-8728.20200085
Abstract:
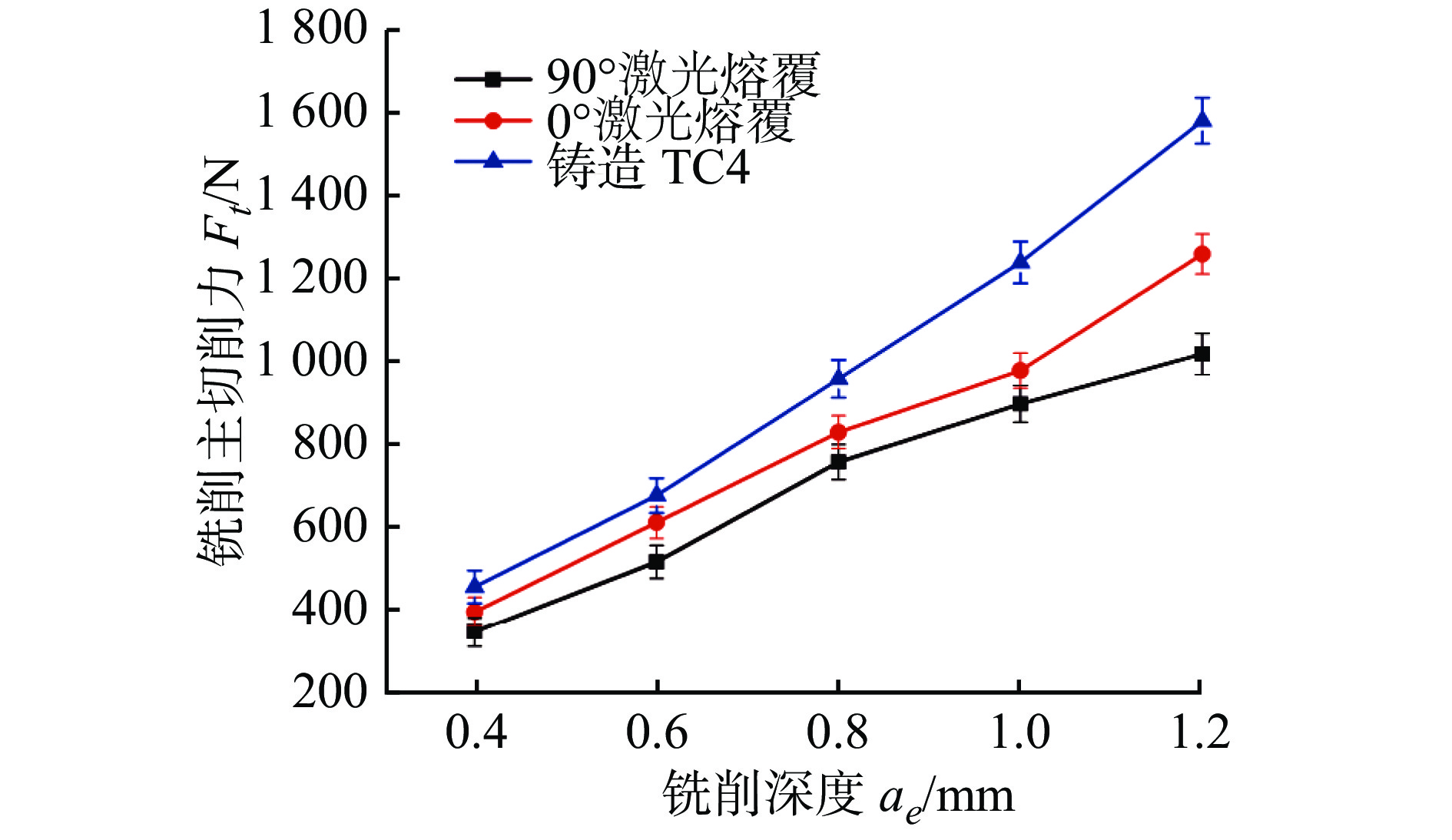
Laser cladding Ti-6Al-4V has been widely used in aerospace because of its excellent comprehensive properties. In order to study the high-speed cutting performance of laser cladding Ti-6Al-4V and explore the influence mechanism of high-speed milling cutting force, a comparative experimental study onhigh-speed milling of laser cladding and cast Ti-6Al-4V was carried out. The results showed that there was the obvious anisotropy in the milling of laser cladding Ti-6Al-4V, in which the cutting force was the largest in a direction of 0° along the cladding path, and the smallest in a direction of 90° along the cladding path, and the cutting force in all directions was lower than that of cast Ti-6Al-4V. In addition, when the cutting speed was more than 400 m/min, the main cutting force decreased obviously. The feed per tooth and milling depth of milling parameters were the most significant factors affecting the cutting force.
Laser cladding Ti-6Al-4V has been widely used in aerospace because of its excellent comprehensive properties. In order to study the high-speed cutting performance of laser cladding Ti-6Al-4V and explore the influence mechanism of high-speed milling cutting force, a comparative experimental study onhigh-speed milling of laser cladding and cast Ti-6Al-4V was carried out. The results showed that there was the obvious anisotropy in the milling of laser cladding Ti-6Al-4V, in which the cutting force was the largest in a direction of 0° along the cladding path, and the smallest in a direction of 90° along the cladding path, and the cutting force in all directions was lower than that of cast Ti-6Al-4V. In addition, when the cutting speed was more than 400 m/min, the main cutting force decreased obviously. The feed per tooth and milling depth of milling parameters were the most significant factors affecting the cutting force.




2021, 40(4): 566-571.
doi: 10.13433/j.cnki.1003-8728.20200078
Abstract:
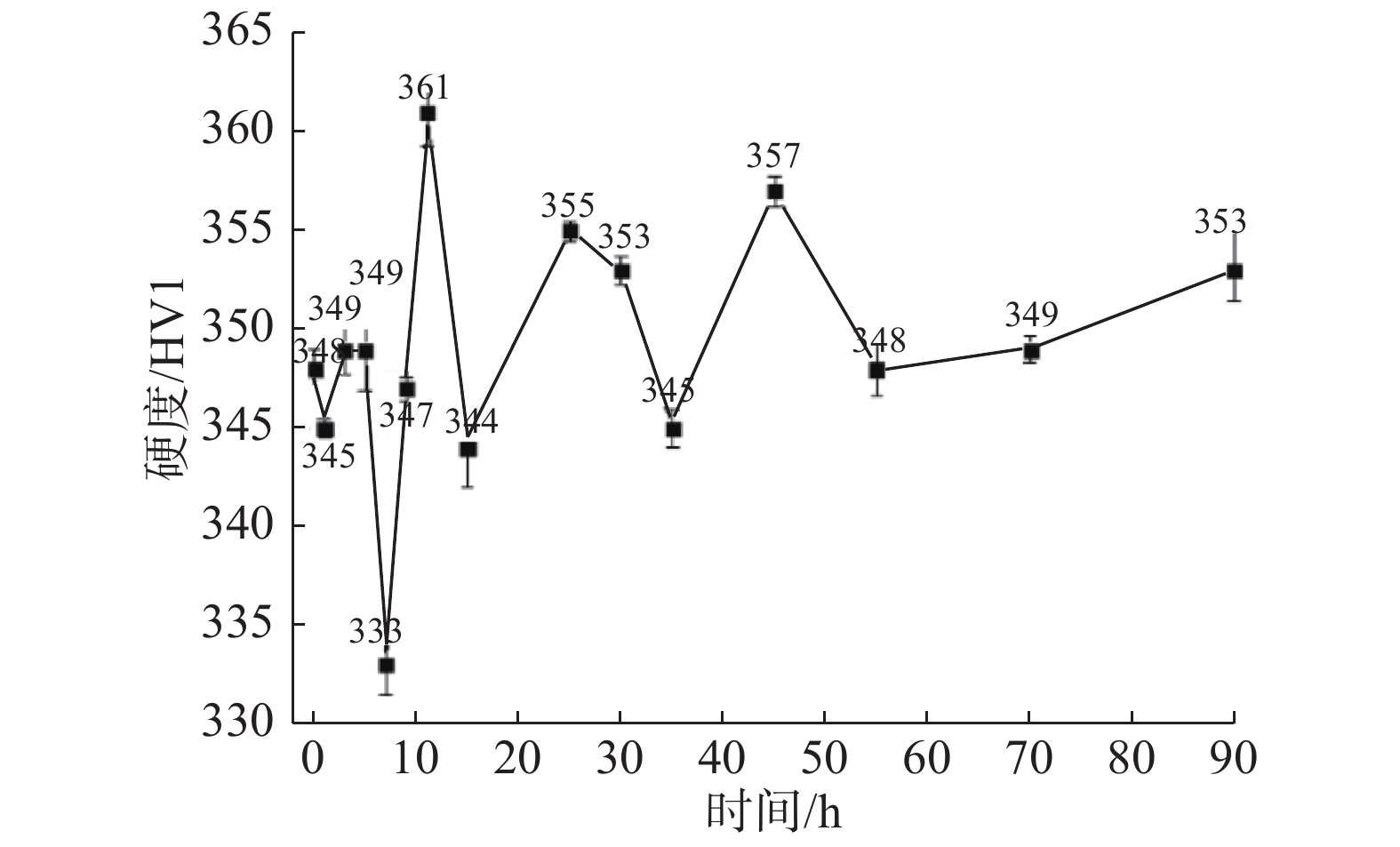
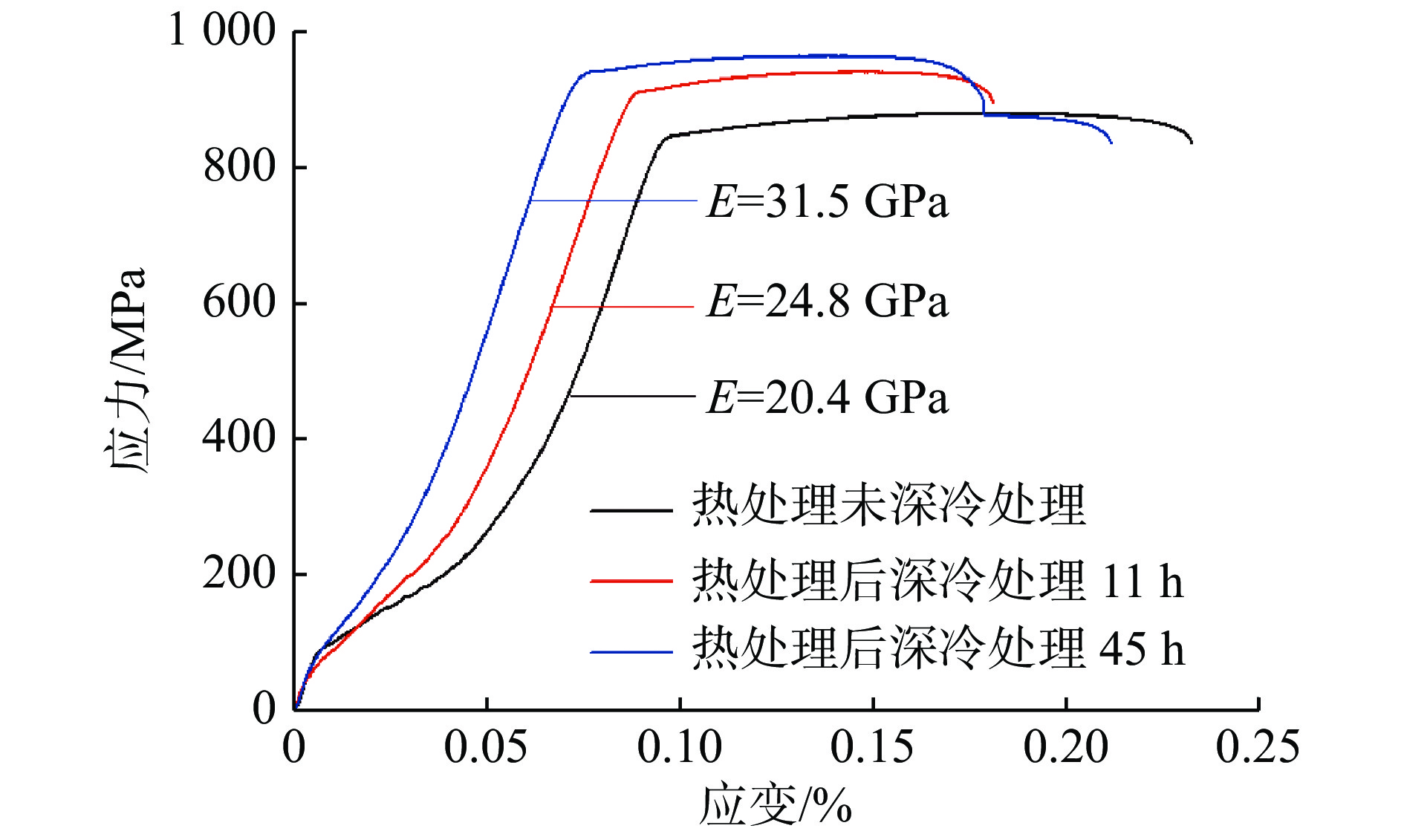
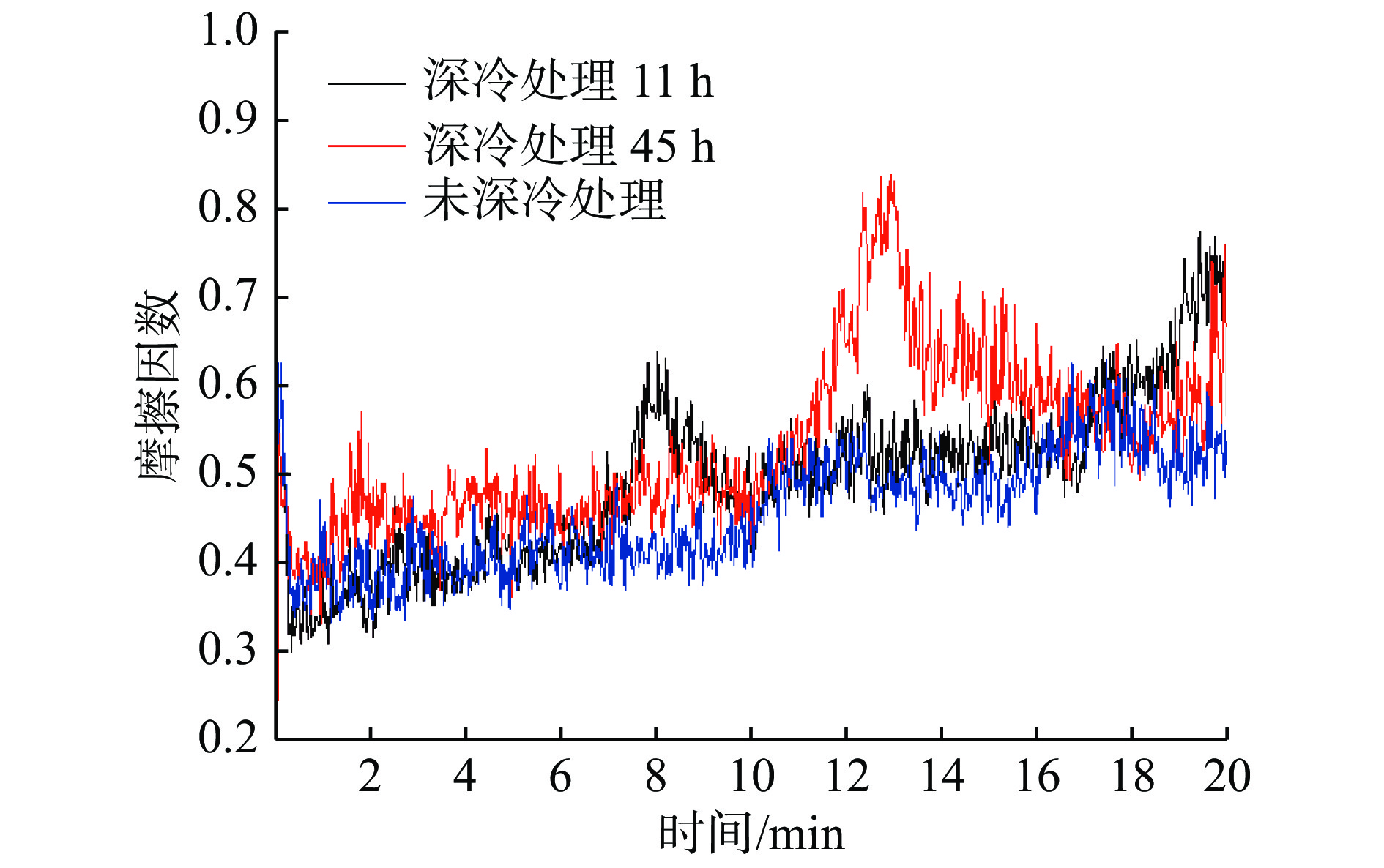
In order to investigate the effect of the cryogenic treatment on the microstructure, mechanical properties and friction and wear properties of TC4 titanium alloy. The surface hardness of TC4 titanium alloy was measured with microhardness tester, the changes of microstructure of TC4 titanium alloy after cryogenic treatment were observed with optical microscope, and its tensile properties were measured with universal tensile test bench. The wear properties of TC4 titanium alloy before and after cryogenic treatment were studied with friction and wear tester, and the micro-morphology and chemistry of wear marks were analyzed with SEM and EDS. The results showed that the microhardness of TC4 titanium alloy was improved via cryogenic treatment. The maximum microhardness of TC4 titanium alloy was 361 HV1 at a cryogenic treatment time of 11 h, which is 3.7% higher than that at the initial time. After cryogenic treatment, the homogenization of the crystal structure is improved and the internal stress of the material is effectively released. The cryogenic treatment can significantly improve the tensile strength, yield limit and modulus of elasticity, and improve the mechanical properties of materials. After cryogenic treatment, the friction coefficient increases and the wear becomes worse.
In order to investigate the effect of the cryogenic treatment on the microstructure, mechanical properties and friction and wear properties of TC4 titanium alloy. The surface hardness of TC4 titanium alloy was measured with microhardness tester, the changes of microstructure of TC4 titanium alloy after cryogenic treatment were observed with optical microscope, and its tensile properties were measured with universal tensile test bench. The wear properties of TC4 titanium alloy before and after cryogenic treatment were studied with friction and wear tester, and the micro-morphology and chemistry of wear marks were analyzed with SEM and EDS. The results showed that the microhardness of TC4 titanium alloy was improved via cryogenic treatment. The maximum microhardness of TC4 titanium alloy was 361 HV1 at a cryogenic treatment time of 11 h, which is 3.7% higher than that at the initial time. After cryogenic treatment, the homogenization of the crystal structure is improved and the internal stress of the material is effectively released. The cryogenic treatment can significantly improve the tensile strength, yield limit and modulus of elasticity, and improve the mechanical properties of materials. After cryogenic treatment, the friction coefficient increases and the wear becomes worse.




2021, 40(4): 572-578.
doi: 10.13433/j.cnki.1003-8728.20200102
Abstract:
Aiming at the requirements of the highaccuracy and the complicated detection environment in the processing detection, a new method of processing detection accuracy was proposed. By dynamically adjusting the spatial position of the 3D design graphics of the detected part, the adjusted spatial position of the graphics and the high-quality image of the detected part collected by the industrial camera are at the same shooting angle, and the 3D design graphics of the part at this time are saved for the spatial pose image, the improved SIFT-Harris algorithm is used to register the high-quality image of the part and the saved spatial pose image, thereby realizing the contrast detection of the part and its corresponding 3D design graphic size. The experimental test shows that the error detection method of dynamic registration of images and graphics has high accuracy and efficiency, and the detection accuracy accords with the probability of error distribution, which has certain promotion and exploration significance for accelerating the development of error detection technology.
Aiming at the requirements of the highaccuracy and the complicated detection environment in the processing detection, a new method of processing detection accuracy was proposed. By dynamically adjusting the spatial position of the 3D design graphics of the detected part, the adjusted spatial position of the graphics and the high-quality image of the detected part collected by the industrial camera are at the same shooting angle, and the 3D design graphics of the part at this time are saved for the spatial pose image, the improved SIFT-Harris algorithm is used to register the high-quality image of the part and the saved spatial pose image, thereby realizing the contrast detection of the part and its corresponding 3D design graphic size. The experimental test shows that the error detection method of dynamic registration of images and graphics has high accuracy and efficiency, and the detection accuracy accords with the probability of error distribution, which has certain promotion and exploration significance for accelerating the development of error detection technology.



2021, 40(4): 579-585.
doi: 10.13433/j.cnki.1003-8728.20200086
Abstract:
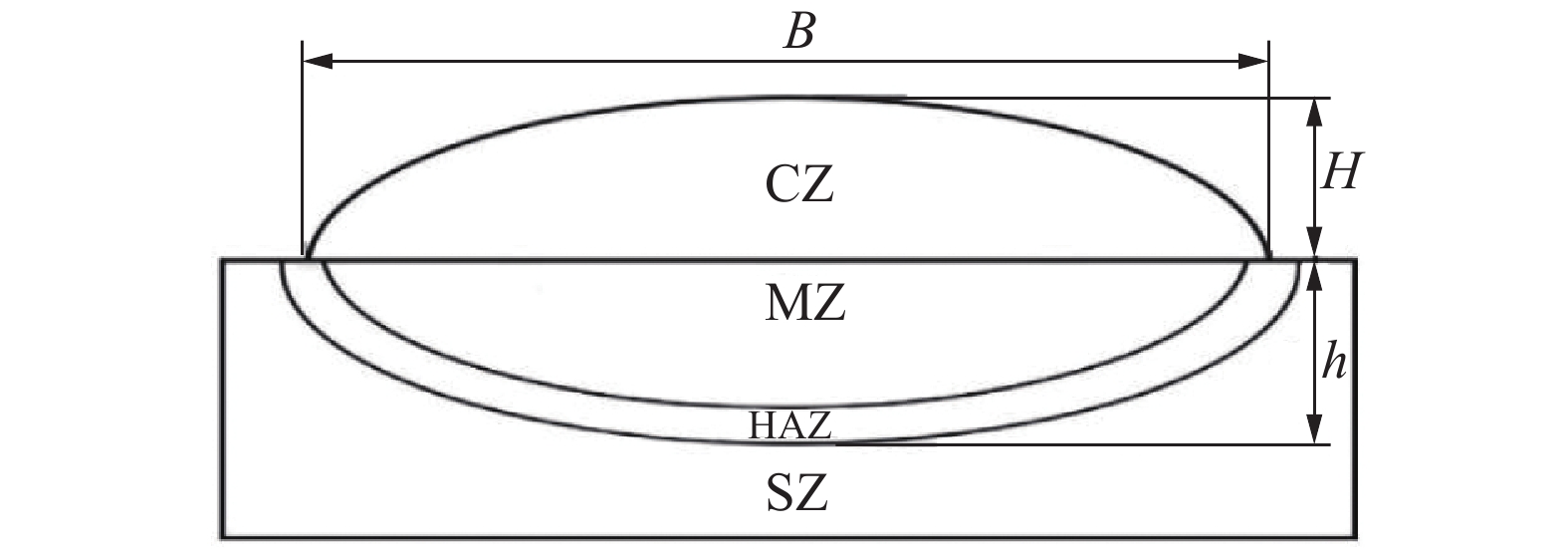
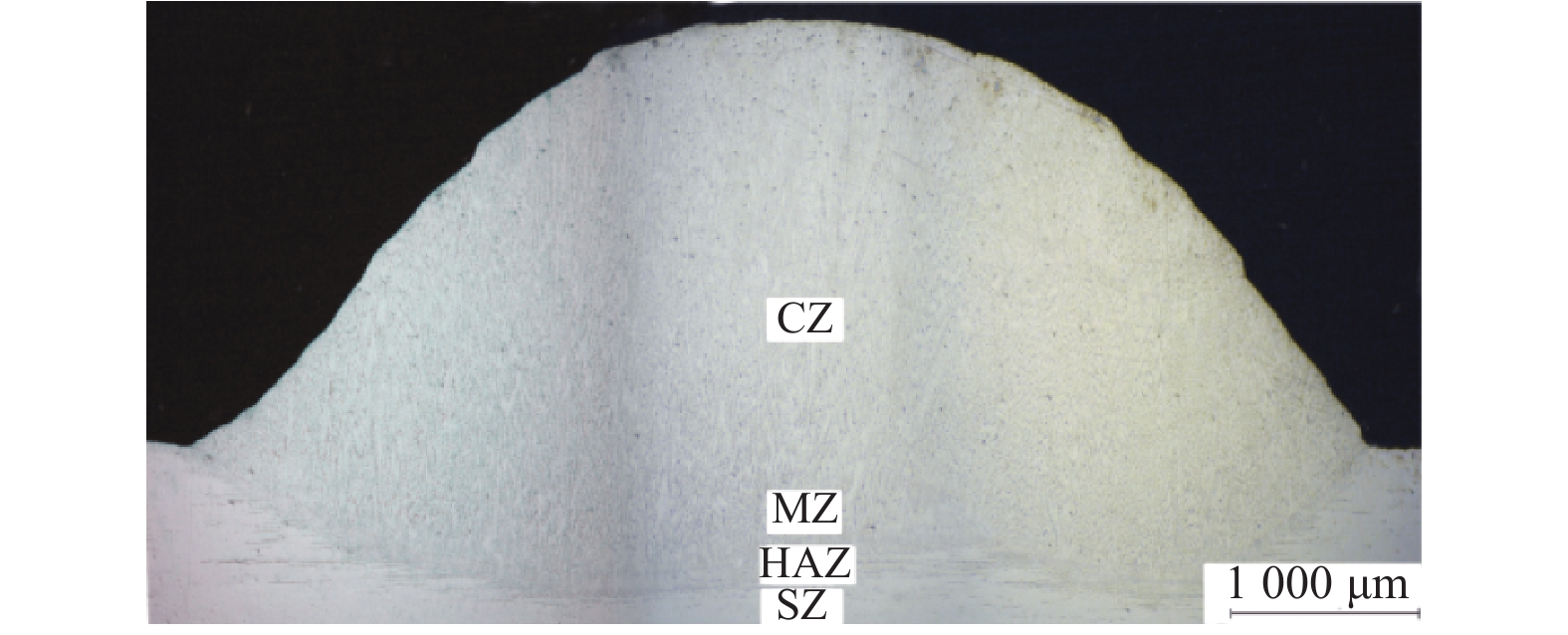
In order to improve the additive efficiency of the stainless steel fabricated by the wire arc additive manufacturing, the 308 stainless steel wire was used to conduct the arc additive on the 304 stainless steel matrix.The processing parameters were designed by using the orthogonal test, the microstructure of the additive tissue was analyzed by using optical microscope, and the microhardness distribution of the additive tissue was tested by microhardness tester. The PCA-TOPSIS(Principal Component Analysis-Technique for Order Preference by Similarity to an Ideal Solution)method was used to evaluate the melting size of cladding. For the optimization objectives of melting width, maximum melting height and minimum melting depth, the optimal processing parameters were obtained thatthe arc current I was 200 A, welding speed Vs was 42 cm/min, and wire feeding speed Vf was 180 cm/min via Matlab.Under the processing parameters, the cladding layer shows the good metallurgical bonding with the matrix, and there are no defects such as pores and cracks.
In order to improve the additive efficiency of the stainless steel fabricated by the wire arc additive manufacturing, the 308 stainless steel wire was used to conduct the arc additive on the 304 stainless steel matrix.The processing parameters were designed by using the orthogonal test, the microstructure of the additive tissue was analyzed by using optical microscope, and the microhardness distribution of the additive tissue was tested by microhardness tester. The PCA-TOPSIS(Principal Component Analysis-Technique for Order Preference by Similarity to an Ideal Solution)method was used to evaluate the melting size of cladding. For the optimization objectives of melting width, maximum melting height and minimum melting depth, the optimal processing parameters were obtained thatthe arc current I was 200 A, welding speed Vs was 42 cm/min, and wire feeding speed Vf was 180 cm/min via Matlab.Under the processing parameters, the cladding layer shows the good metallurgical bonding with the matrix, and there are no defects such as pores and cracks.




2021, 40(4): 586-591.
doi: 10.13433/j.cnki.1003-8728.20200081
Abstract:
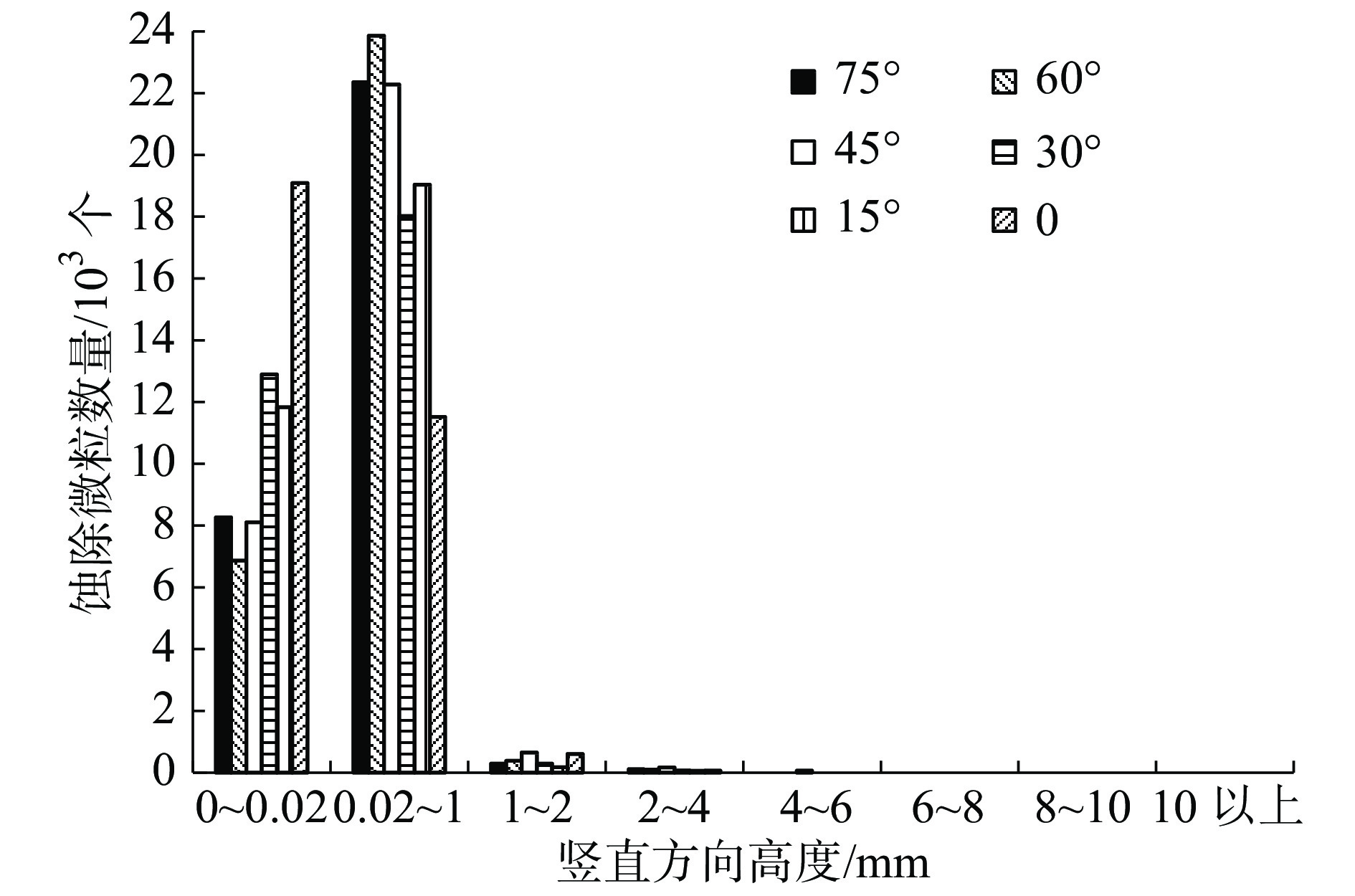
Spiral electrode is considered to improve the flow field environment of machining gap on chip removal in Electrical Discharge Machining (EDM) of deep holes. To explore the helical angle and direction of rotation have an influence on chip removal in spiral electrode. In this paper, the fluid dynamics model that different helix Angles of electrodes is established by Fluent simulation software. It is analyzed that the effect of different spiral Angle and rotation direction on the flow field and debris removal. Simulation result shows that the effect of debris removal that use of spiral electrode with 45° angle is best. The positive rotation machining of spiral electrode is more advantageous to removal debris from machining gap.
Spiral electrode is considered to improve the flow field environment of machining gap on chip removal in Electrical Discharge Machining (EDM) of deep holes. To explore the helical angle and direction of rotation have an influence on chip removal in spiral electrode. In this paper, the fluid dynamics model that different helix Angles of electrodes is established by Fluent simulation software. It is analyzed that the effect of different spiral Angle and rotation direction on the flow field and debris removal. Simulation result shows that the effect of debris removal that use of spiral electrode with 45° angle is best. The positive rotation machining of spiral electrode is more advantageous to removal debris from machining gap.








2021, 40(4): 592-597.
doi: 10.13433/j.cnki.1003-8728.20200083
Abstract:
The coupled vibrations of bottom drilling tool assembly not only reduced stability and aggressiveness of drill bit, but also easily caused fatigue failure of drill tools, which often leading to downhole accident. At present, most of the conventional auxiliary rock-breaking tools can only suppress vibration in a single form, and the drilling acceleration effect is limited for complicated working conditions with coupled vibrations. Therefore a damping steady torque percussion drilling acceleration tool has been put forward, it integrates the functions of compound impact, damping and steady torque, which can effectively suppress bit's irregular vibrations and ensure smooth and fast drilling. This study focuses on the impact energy generating unit of the new tool as mentioned above, and the mathematical model of the variable orifice has firstly been established. Then, the corresponding relationship between the variable orifice area and the differential pressure is obtained by numerical analysis based on the MATLAB simulation model, and the geometric parameters of the valve disc are determined. Finally, the ground experiment has been completed on the prototype of the new tool, and the test result of the differential pressure of the variable orifice was good consistent with the simulation result, which meets the requirements of the field application.
The coupled vibrations of bottom drilling tool assembly not only reduced stability and aggressiveness of drill bit, but also easily caused fatigue failure of drill tools, which often leading to downhole accident. At present, most of the conventional auxiliary rock-breaking tools can only suppress vibration in a single form, and the drilling acceleration effect is limited for complicated working conditions with coupled vibrations. Therefore a damping steady torque percussion drilling acceleration tool has been put forward, it integrates the functions of compound impact, damping and steady torque, which can effectively suppress bit's irregular vibrations and ensure smooth and fast drilling. This study focuses on the impact energy generating unit of the new tool as mentioned above, and the mathematical model of the variable orifice has firstly been established. Then, the corresponding relationship between the variable orifice area and the differential pressure is obtained by numerical analysis based on the MATLAB simulation model, and the geometric parameters of the valve disc are determined. Finally, the ground experiment has been completed on the prototype of the new tool, and the test result of the differential pressure of the variable orifice was good consistent with the simulation result, which meets the requirements of the field application.






2021, 40(4): 598-603.
doi: 10.13433/j.cnki.1003-8728.20200095
Abstract:
In order to strengthen the stability and reliability of the feedforward system, the influence of time lag in the control process is reduced.A method for predicting disturbance signals based on the LSTM deep learning network that combines multi-time scales is proposed. Both the accuracy and impact of prediction error fluctuation on the controlsystem are considered.The prediction results show that the root mean squares error (RMSE) is between 0.0013 and 0.0074, which meets actual engineering requirements. The kurtosis is used to estimate the fluctuation of the prediction error sequence at each moment.To ensure that the prediction accuracy meets the engineering requirements, the multi-time scale method is jointly used to adjust the impact fluctuation of the prediction error sequence at various stages, so as to achieve better control efficiency and lower risk in specific engineering applications.
In order to strengthen the stability and reliability of the feedforward system, the influence of time lag in the control process is reduced.A method for predicting disturbance signals based on the LSTM deep learning network that combines multi-time scales is proposed. Both the accuracy and impact of prediction error fluctuation on the controlsystem are considered.The prediction results show that the root mean squares error (RMSE) is between 0.0013 and 0.0074, which meets actual engineering requirements. The kurtosis is used to estimate the fluctuation of the prediction error sequence at each moment.To ensure that the prediction accuracy meets the engineering requirements, the multi-time scale method is jointly used to adjust the impact fluctuation of the prediction error sequence at various stages, so as to achieve better control efficiency and lower risk in specific engineering applications.





2021, 40(4): 604-608.
doi: 10.13433/j.cnki.1003-8728.20200093
Abstract:
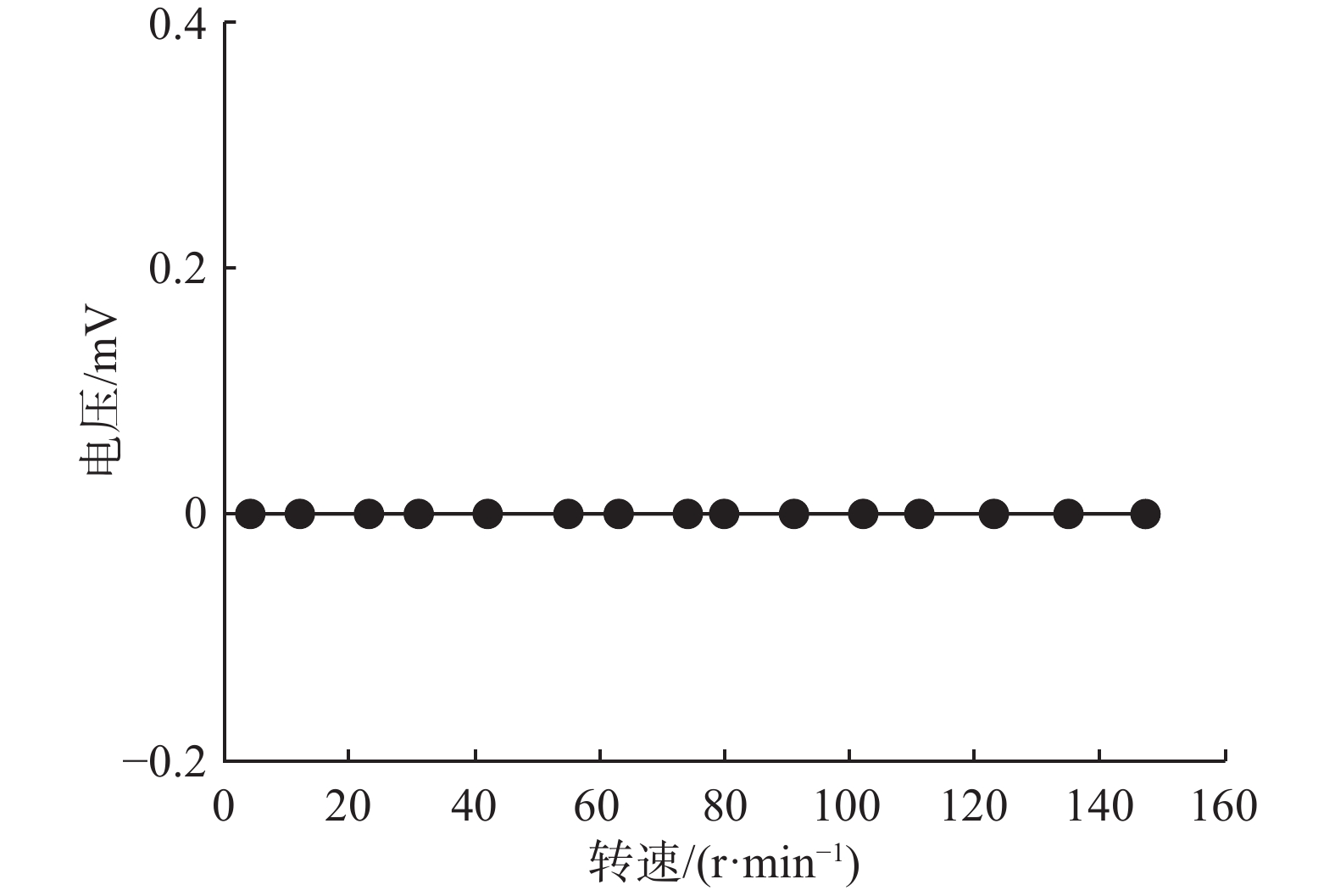
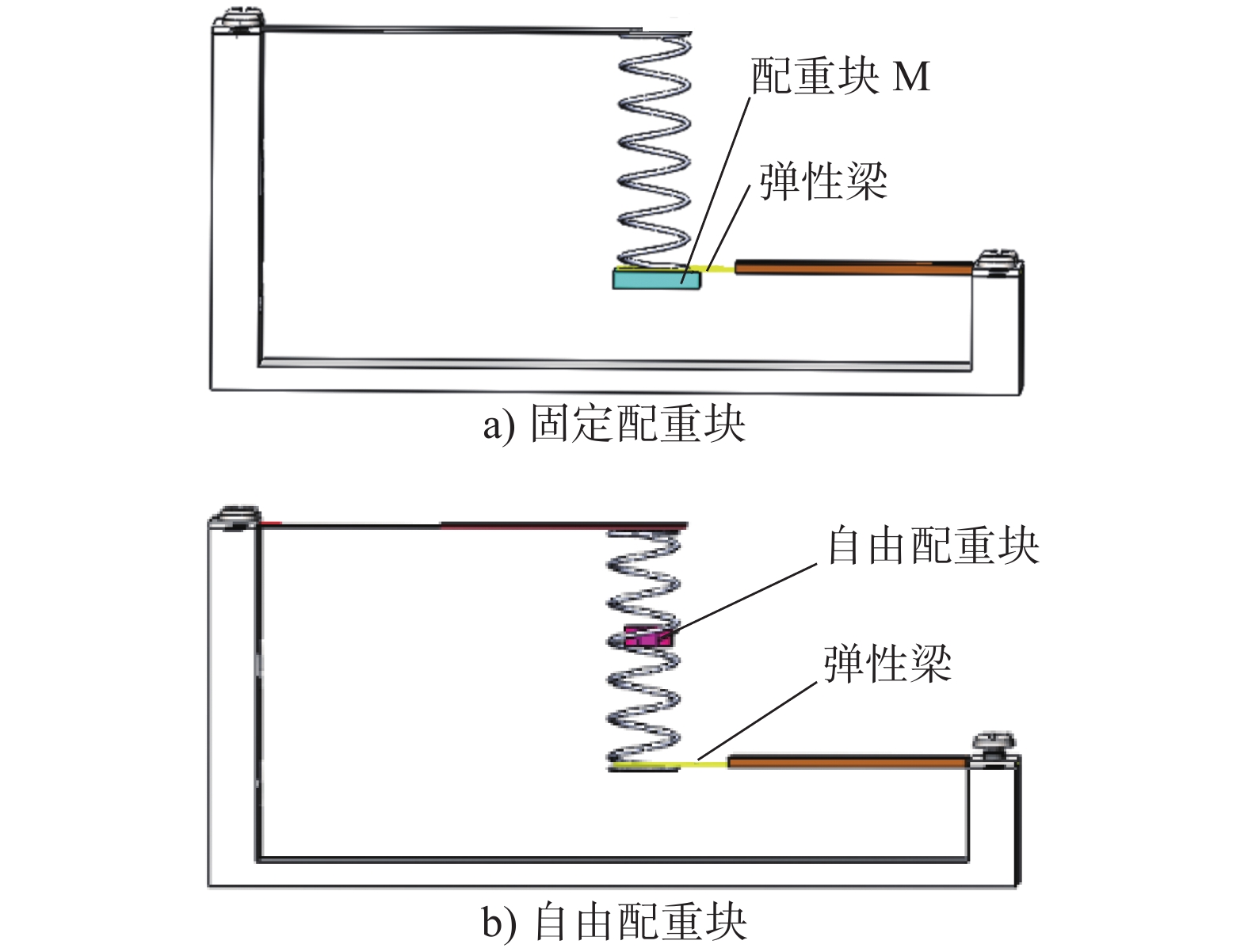
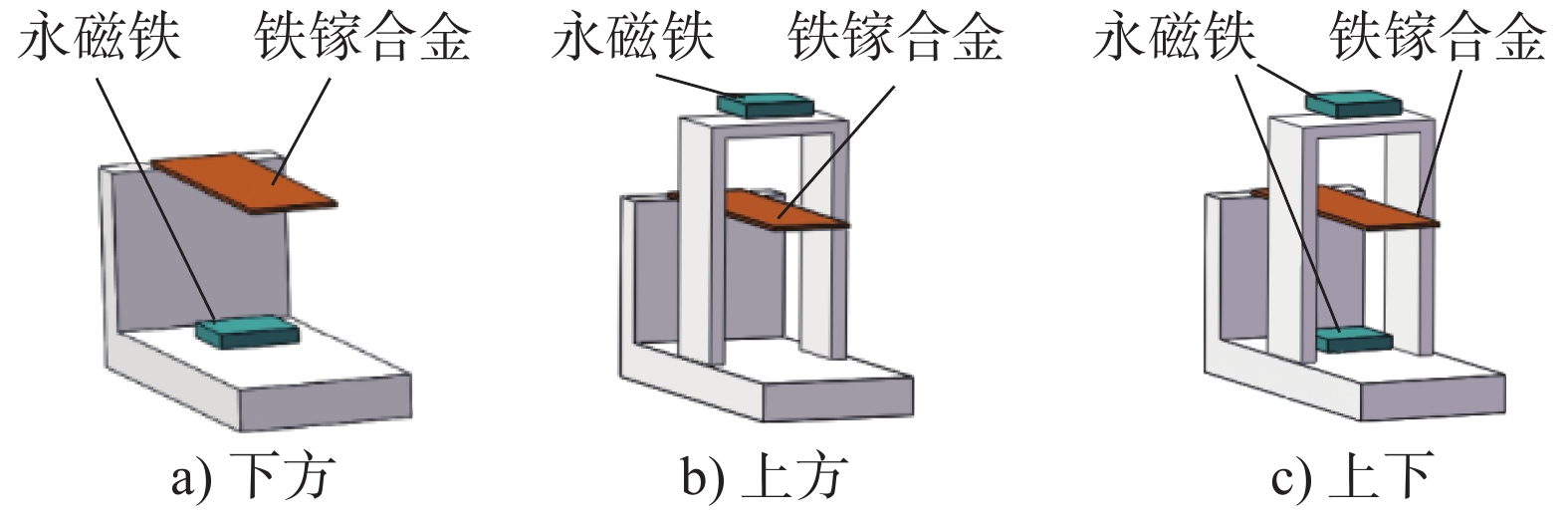
As the power consumption of wireless sensors decreases from mW to μW level, there is a new possibility for powering wireless low-power devices. In this paper, a new type of vibration energy collection and power generation device is designed and tested based on magnetostrictive material (iron-gallium alloy). The device can be applied to power a wireless autonomous monitoring system for a wind turbine, and its operating frequency bandwidth is defined by the rotation speed of the wind turbine and ranges from 0 to 150 r/min. An experimental platform is set up for experimental study on energy collection and power generation from low frequency rotation vibration. The experimental results show that, when the bias magnetic field is placed in the best position and a 5 g free weight is added, the energy harvesting system can generate a maximum voltage of 320 mV and a maximum power of 232 μW, which can meet the power requirements of low-power wireless transmitters.
As the power consumption of wireless sensors decreases from mW to μW level, there is a new possibility for powering wireless low-power devices. In this paper, a new type of vibration energy collection and power generation device is designed and tested based on magnetostrictive material (iron-gallium alloy). The device can be applied to power a wireless autonomous monitoring system for a wind turbine, and its operating frequency bandwidth is defined by the rotation speed of the wind turbine and ranges from 0 to 150 r/min. An experimental platform is set up for experimental study on energy collection and power generation from low frequency rotation vibration. The experimental results show that, when the bias magnetic field is placed in the best position and a 5 g free weight is added, the energy harvesting system can generate a maximum voltage of 320 mV and a maximum power of 232 μW, which can meet the power requirements of low-power wireless transmitters.









2021, 40(4): 609-618.
doi: 10.13433/j.cnki.1003-8728.20200103
Abstract:
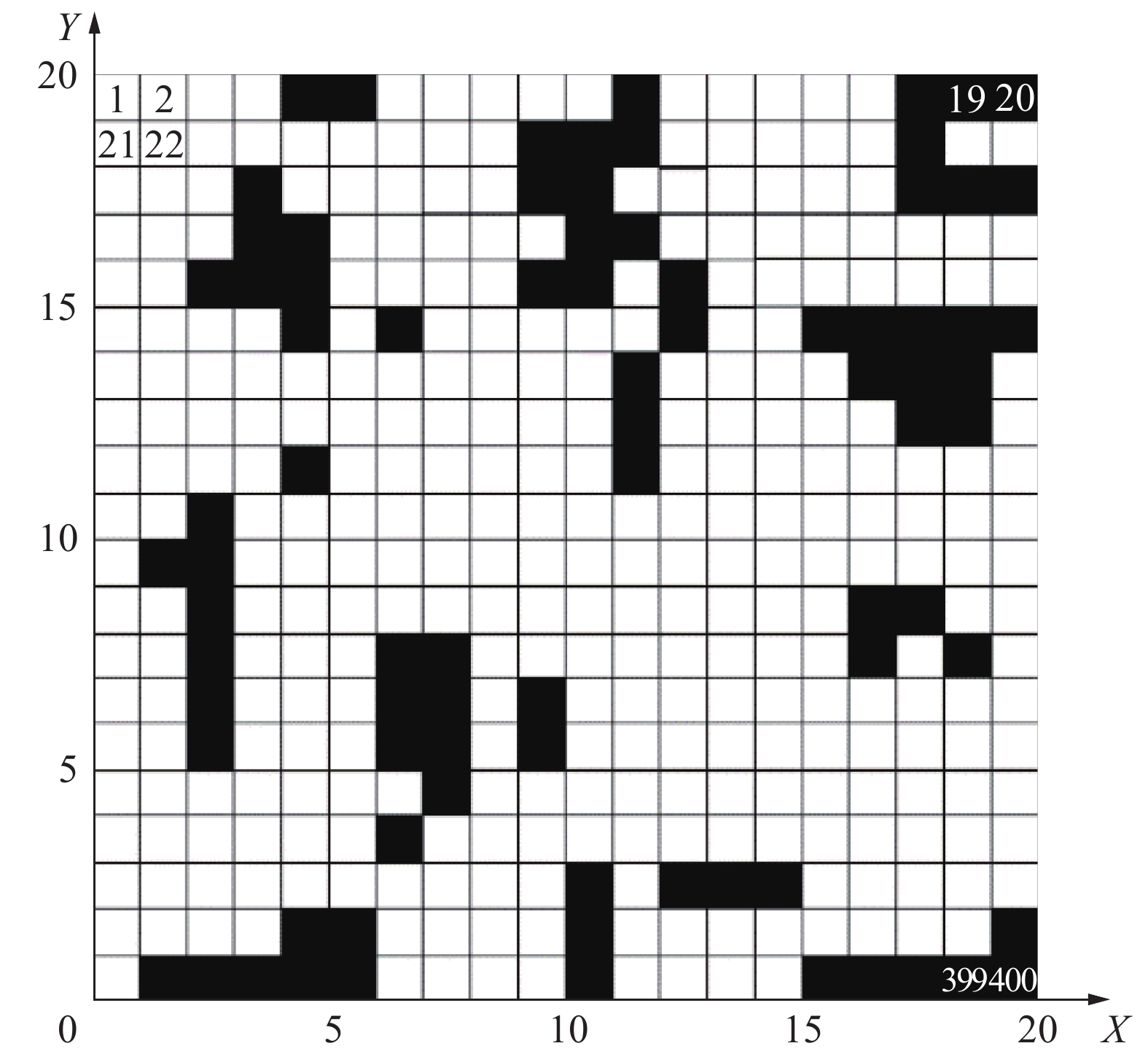
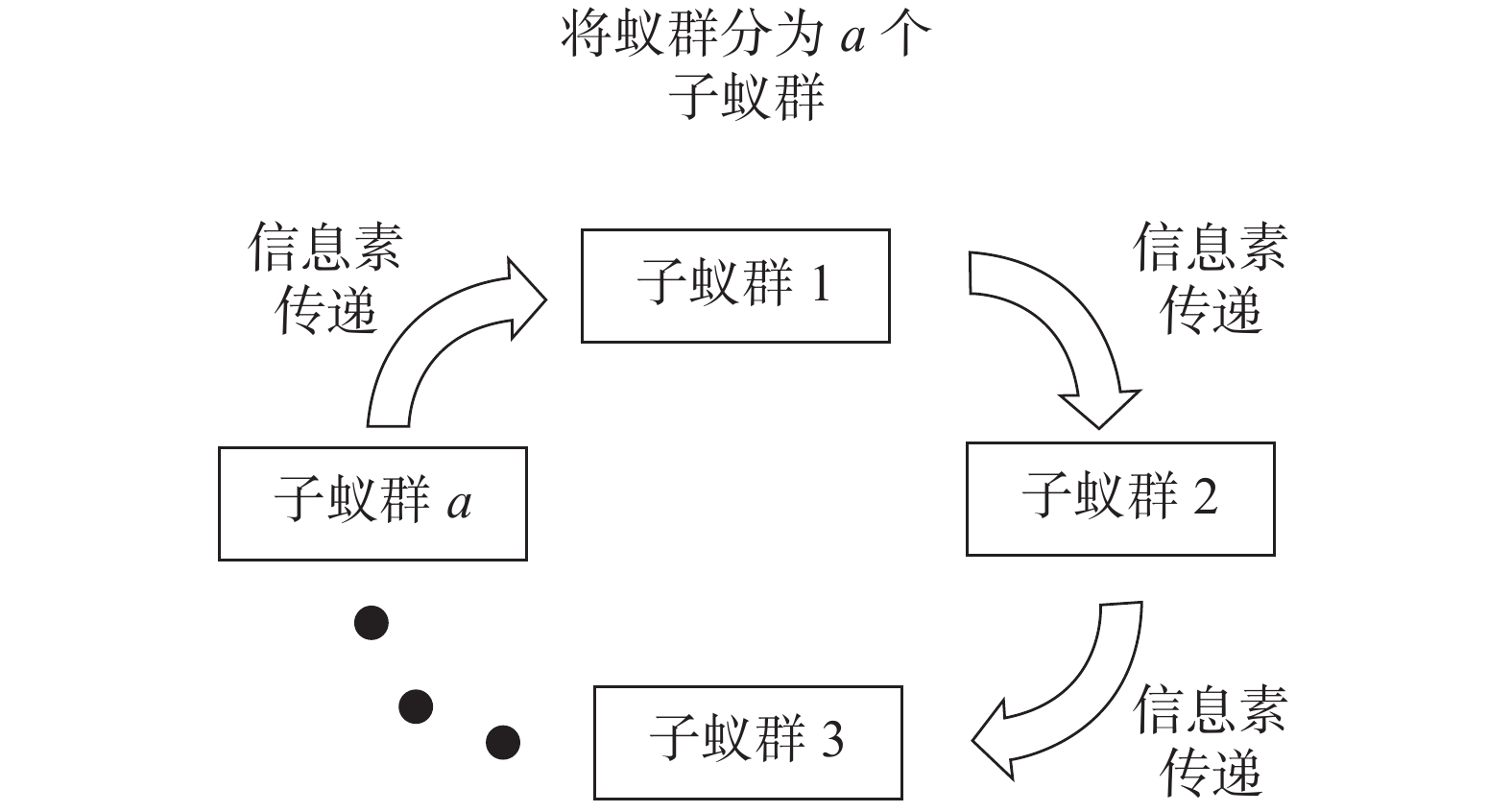
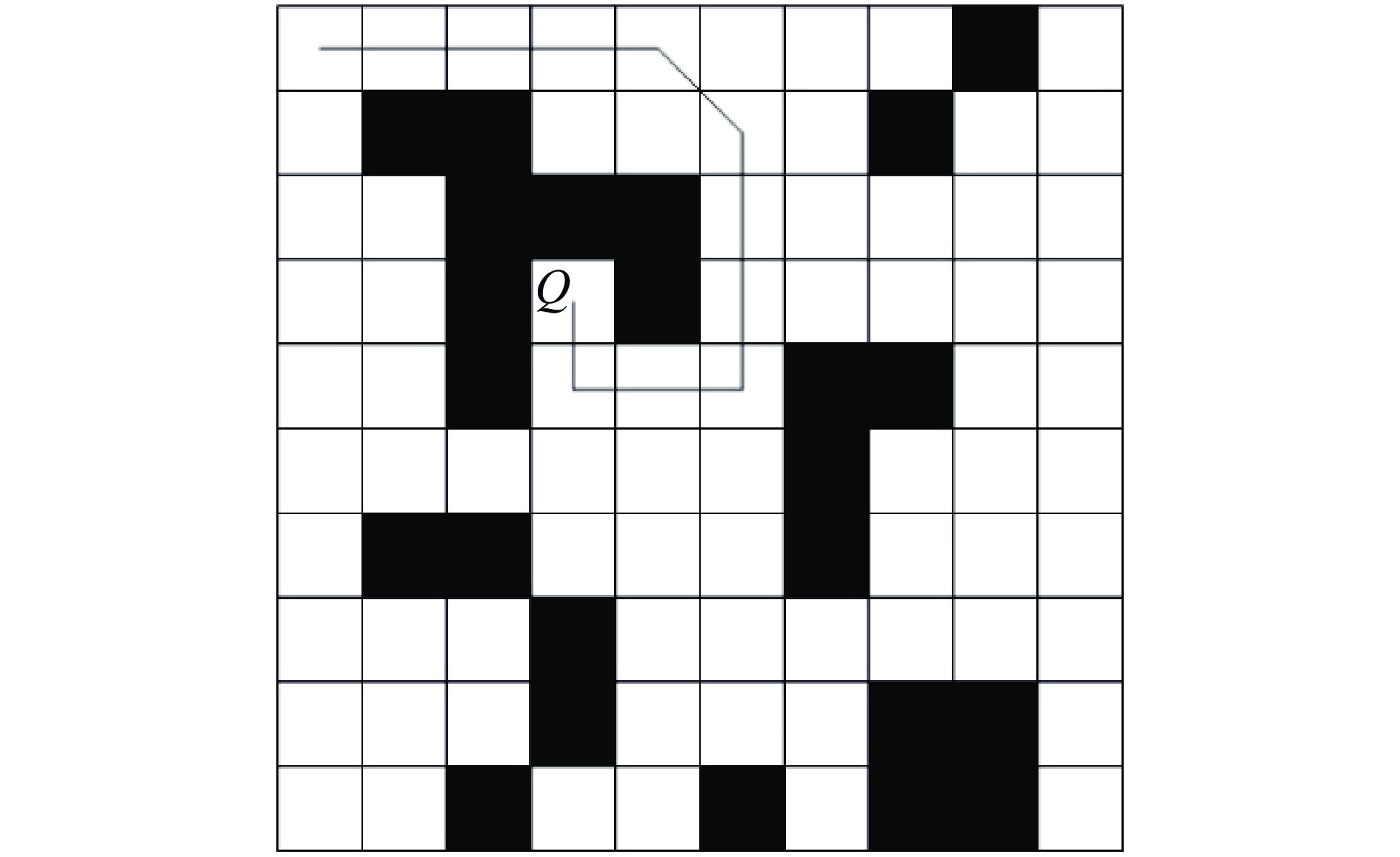
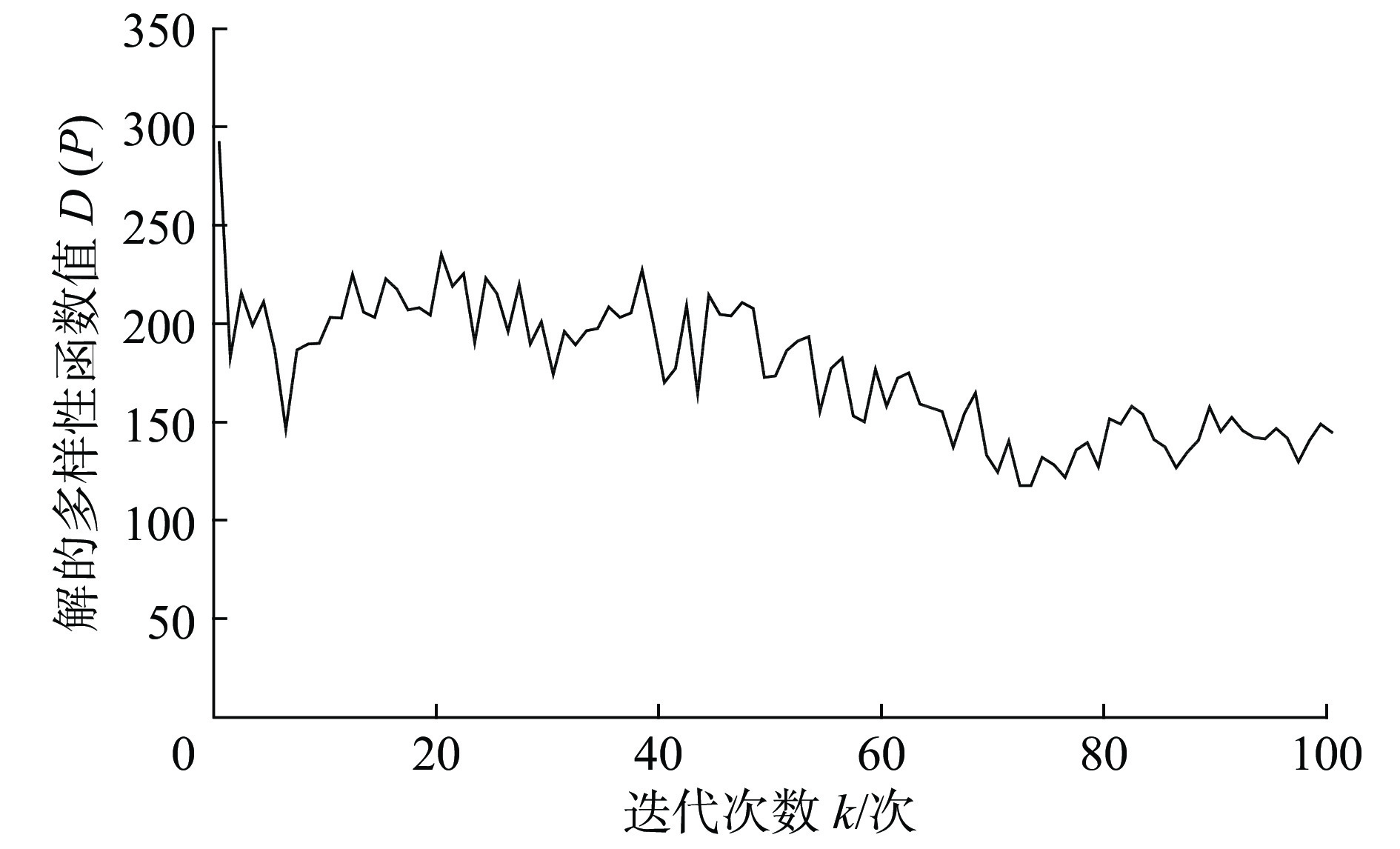
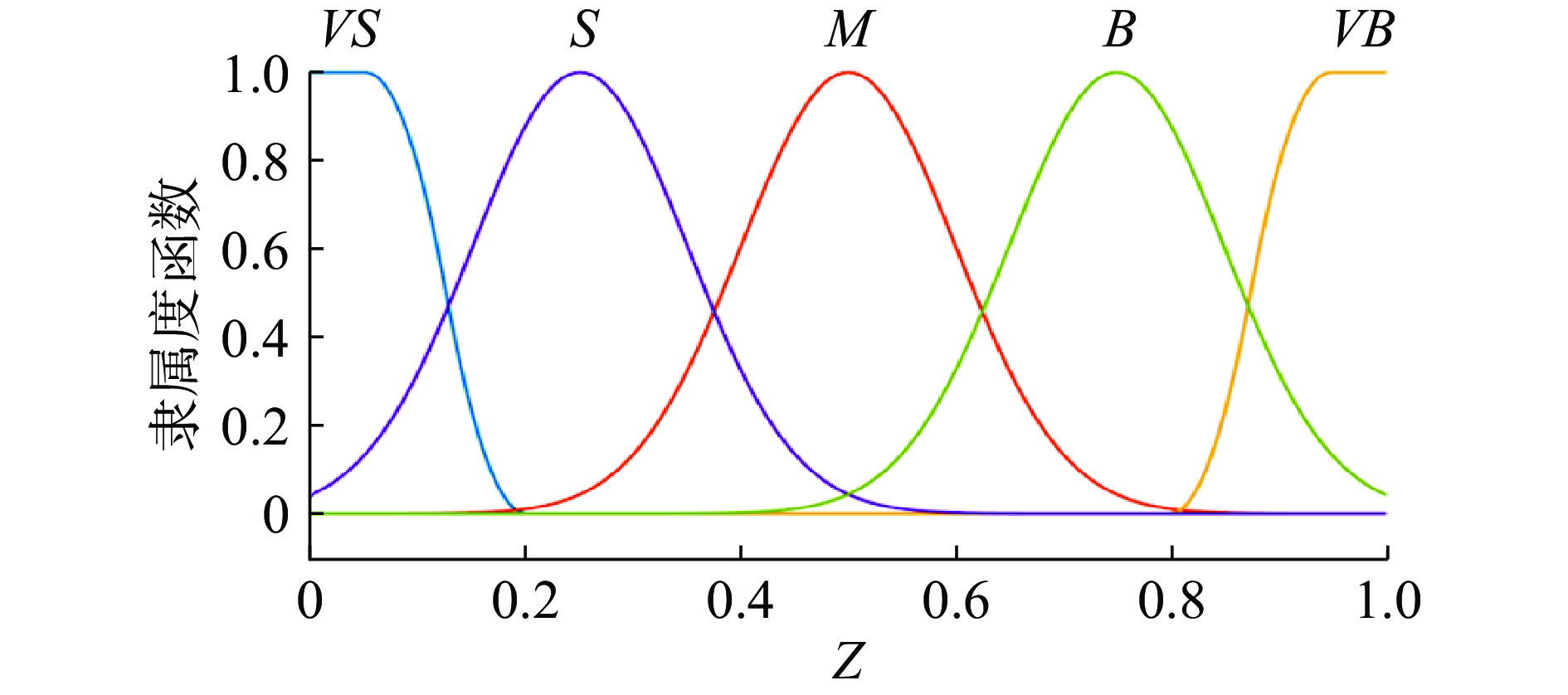
To plan thepath of an automatically guided vehicle (AGV) in an intelligent warehouse, a path planning method based on theparallel-rankting ant colony optimizationalgorithm is proposed. The method improves its overall search ability through the pheromone interaction released by superior ants among multiple ant sub-colonies. A multi-objective optimization function model with the shortest path and the least number of turns of the AGV as optimization objectives is established and is solved with theparallel-rankingant colony optimizationalgorithm.The initial pathgenerated with the optimization algorithmis smoothed by reducing intermediate nodes. The MATLABcomputer simulation results show that the method has better stability and convergence speed and that the smoothing is effective.
To plan thepath of an automatically guided vehicle (AGV) in an intelligent warehouse, a path planning method based on theparallel-rankting ant colony optimizationalgorithm is proposed. The method improves its overall search ability through the pheromone interaction released by superior ants among multiple ant sub-colonies. A multi-objective optimization function model with the shortest path and the least number of turns of the AGV as optimization objectives is established and is solved with theparallel-rankingant colony optimizationalgorithm.The initial pathgenerated with the optimization algorithmis smoothed by reducing intermediate nodes. The MATLABcomputer simulation results show that the method has better stability and convergence speed and that the smoothing is effective.







2021, 40(4): 619-626.
doi: 10.13433/j.cnki.1003-8728.20200118
Abstract:
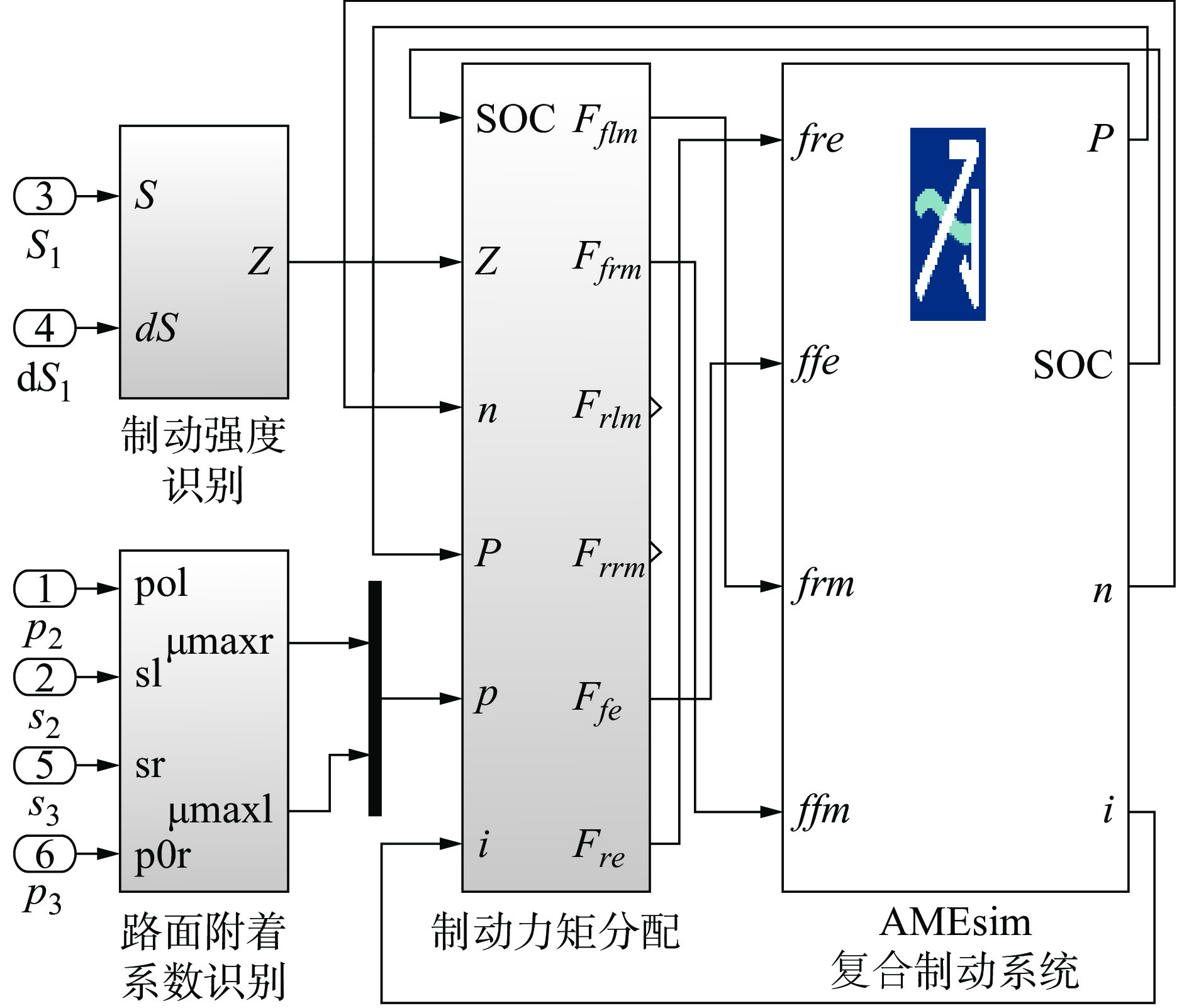
For the energy recovery by limiting the distributed drive electric vehicle braking mode switching condition, a new braking mode switching condition was set and a new compound braking control strategy was designed, by dividing braking torque distributed strategy into the top-level and the low-level control strategy. The top-level control strategy selected a best braking mode, low-level control strategy distributed the electronic brake force and hydraulic brake force for every wheel. A hybrid brake control model for the distributed drive electric vehicle was built by AMEsim and Simulink, and the simulation analysis of the control strategy was conducted with different driving conditions. The results show that the present control strategy can accurately switch the braking mode, and make the maximum braking energy recovery while keeping the braking stability.
For the energy recovery by limiting the distributed drive electric vehicle braking mode switching condition, a new braking mode switching condition was set and a new compound braking control strategy was designed, by dividing braking torque distributed strategy into the top-level and the low-level control strategy. The top-level control strategy selected a best braking mode, low-level control strategy distributed the electronic brake force and hydraulic brake force for every wheel. A hybrid brake control model for the distributed drive electric vehicle was built by AMEsim and Simulink, and the simulation analysis of the control strategy was conducted with different driving conditions. The results show that the present control strategy can accurately switch the braking mode, and make the maximum braking energy recovery while keeping the braking stability.























2021, 40(4): 627-632.
doi: 10.13433/j.cnki.1003-8728.20200079
Abstract:
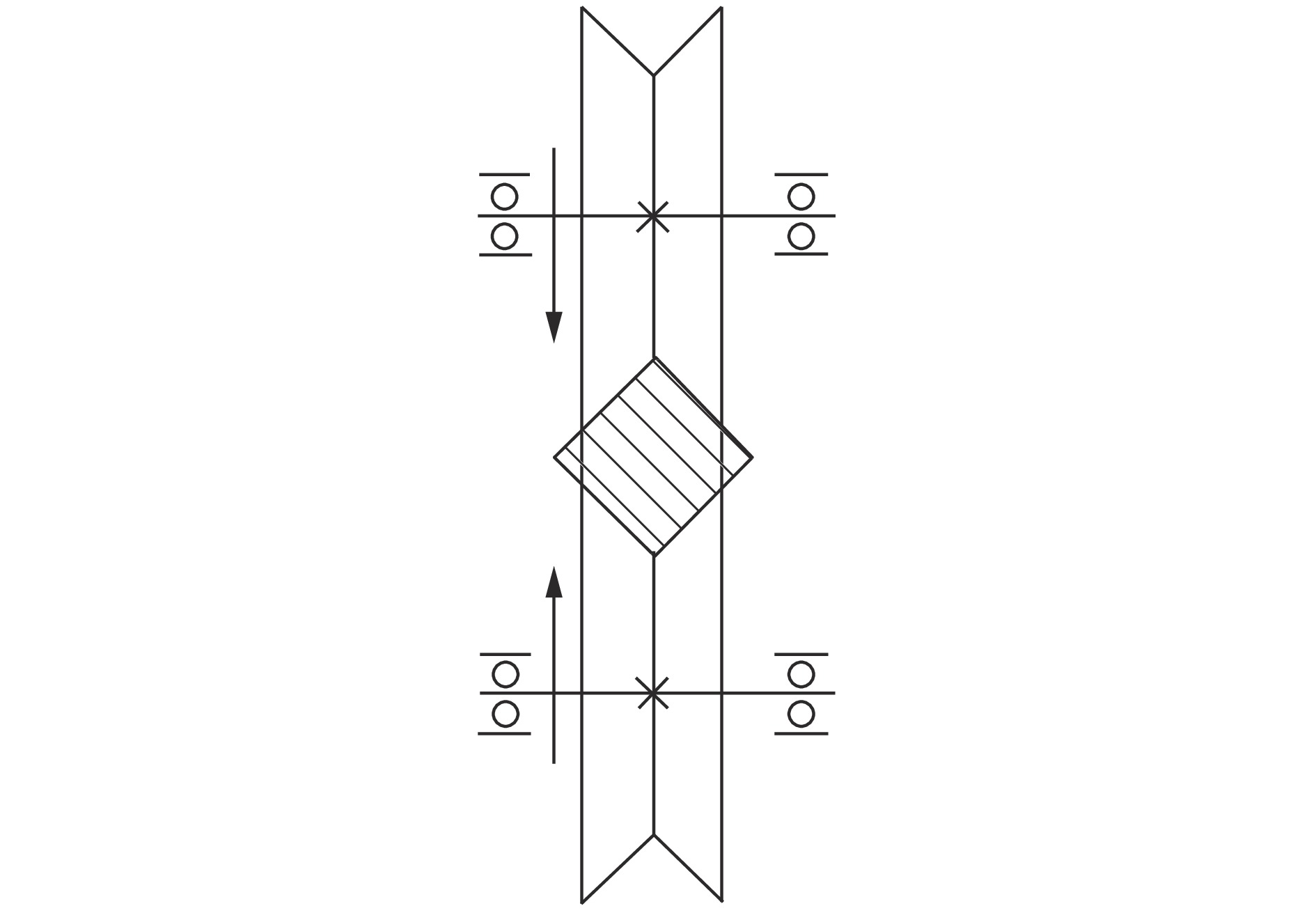
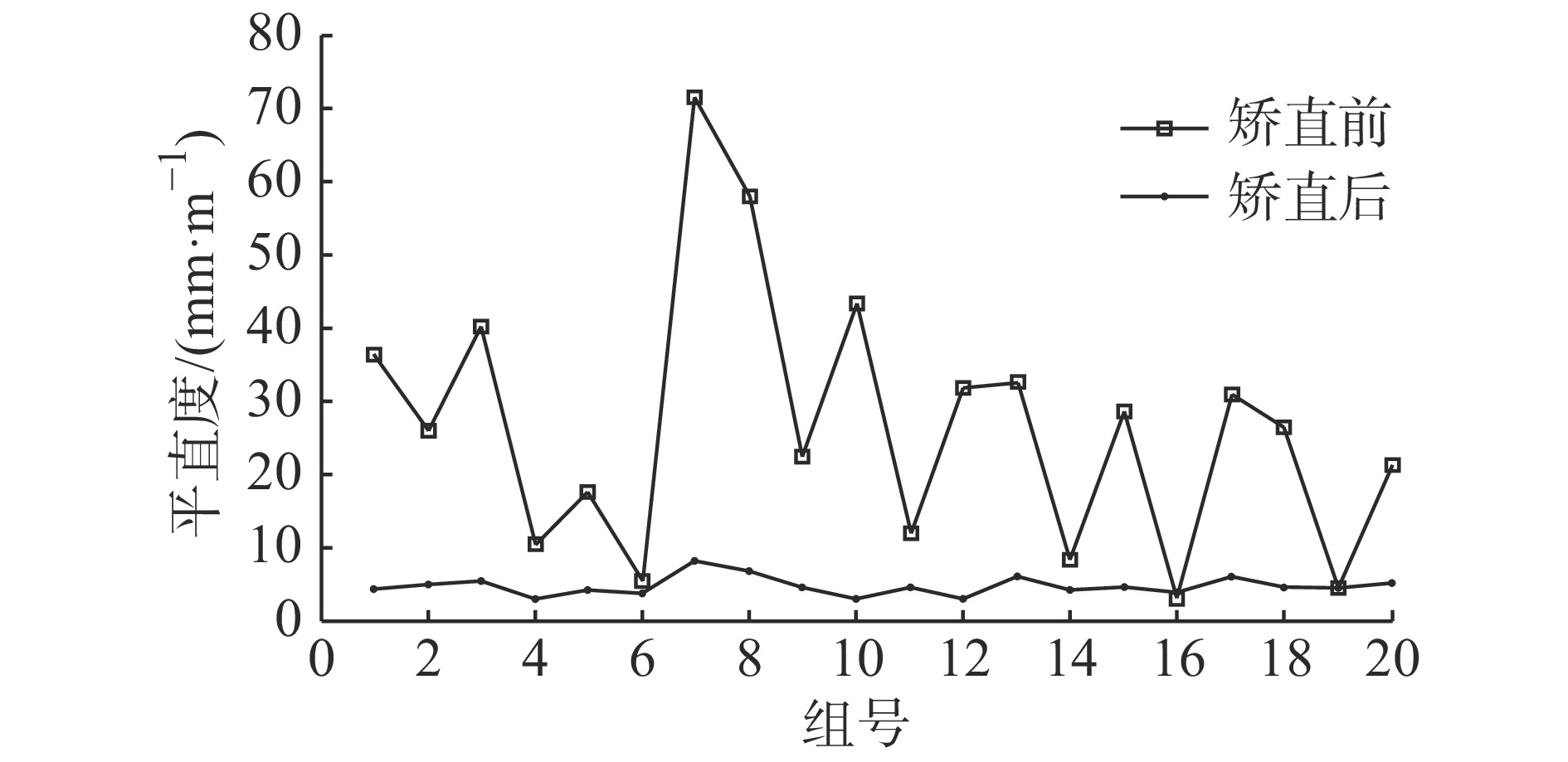
Based on the elastic-plastic deformation theory, three-dimensional finite element model for a seven-roll straightening machine with V-rollers was established with ANSYS LS-DYNA to analyze thestraightening process of V-shaped roller. According to the scheme of the small deformation of the bending amount, the bending amount designwas carried out. The deformation of rhomboid profile in the straightening process and the distribution of residual stress after straightening under the different bending amounts were analyzed. The results show that the residual stress distributes mainly at the boundary of diamond profile after the straightening. The maximum residual stress decreases firstly and then increases with the increasing of bending amount. The optimal bending amount of the diamond profile with a section size of 22 mm×22 mm is determined with the finite element analysis. The straightness of the profiles before and after straightening is compared through the experiments and finite element analysis. The experimental and finite element simulation results show that under the optimal bending amount, the straightness after being straightened by the straightening piece satisfies the accuracy requirement, and the simulation results are consistent with the experimental, which verifies the correctness of the theoretical model.
Based on the elastic-plastic deformation theory, three-dimensional finite element model for a seven-roll straightening machine with V-rollers was established with ANSYS LS-DYNA to analyze thestraightening process of V-shaped roller. According to the scheme of the small deformation of the bending amount, the bending amount designwas carried out. The deformation of rhomboid profile in the straightening process and the distribution of residual stress after straightening under the different bending amounts were analyzed. The results show that the residual stress distributes mainly at the boundary of diamond profile after the straightening. The maximum residual stress decreases firstly and then increases with the increasing of bending amount. The optimal bending amount of the diamond profile with a section size of 22 mm×22 mm is determined with the finite element analysis. The straightness of the profiles before and after straightening is compared through the experiments and finite element analysis. The experimental and finite element simulation results show that under the optimal bending amount, the straightness after being straightened by the straightening piece satisfies the accuracy requirement, and the simulation results are consistent with the experimental, which verifies the correctness of the theoretical model.





2021, 40(4): 633-640.
doi: 10.13433/j.cnki.1003-8728.20200089
Abstract:
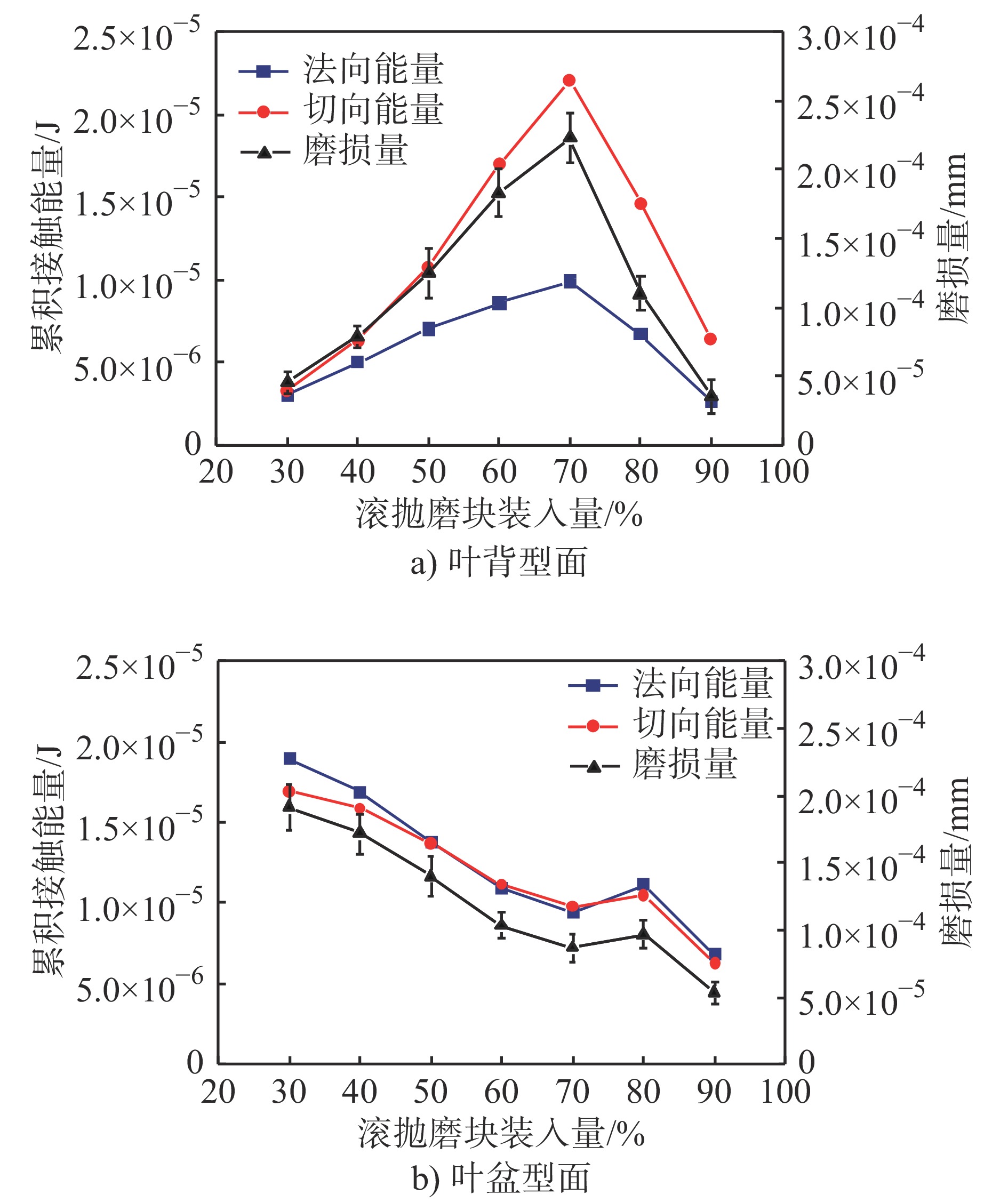
To explore the working mechanism of the rotary-typed mass finishing for aeroengine blisk, the processing cycles were simulated based on the discrete element method (DEM). The amount of Archard wear and the cumulative contact energy in the blade surface were used as the evaluation standard. The effects of the abrasive loading quantity and the barrel speed on the processing effect were studied. The results show that the processing efficiency of the blade profile is greatly affected by the processing parameters, and the convex and the concave show obvious differences. The rotary-typed mass finishing can effectively ensure the processing uniformity among the different blades, and under the loading quantityof 50% and rotary speed of 60 r/min, the processing uniformity in the different areas of the same blade profile is the best. Considering the processing efficiency and uniformity, the following parameter are preferred: the loading quantity of 50% ~ 60%; the rotary speed of 0.65nmax ~ 0.8nmax.
To explore the working mechanism of the rotary-typed mass finishing for aeroengine blisk, the processing cycles were simulated based on the discrete element method (DEM). The amount of Archard wear and the cumulative contact energy in the blade surface were used as the evaluation standard. The effects of the abrasive loading quantity and the barrel speed on the processing effect were studied. The results show that the processing efficiency of the blade profile is greatly affected by the processing parameters, and the convex and the concave show obvious differences. The rotary-typed mass finishing can effectively ensure the processing uniformity among the different blades, and under the loading quantityof 50% and rotary speed of 60 r/min, the processing uniformity in the different areas of the same blade profile is the best. Considering the processing efficiency and uniformity, the following parameter are preferred: the loading quantity of 50% ~ 60%; the rotary speed of 0.65nmax ~ 0.8nmax.













2021, 40(4): 641-648.
doi: 10.13433/j.cnki.1003-8728.20200084
Abstract:
To solve the disadvantages for the traditional detection method of aircraft skin, such as low efficiency, long working period and poor recognition, a propeller thrust adsorption climbing robot which can independently complete aircraft skin detection has been developed. Firstly, according to the application background of wall-climbing robot, the mechanical structure design of the robot was carried out. With the crawler drive as its moving mechanism, the corresponding crawler deformation mechanism was designed to improve its adaptive barrier crossing performance, and the propeller was used as the thrust to provide its reverse operation adsorption capacity. Secondly, the stability of climbing movement is analyzed. Finally, the kinematics model for the robot is established, and its obstacle crossing ability is analyzed. Then the feasibility of its application in aircraft skin detection is demonstrated.
To solve the disadvantages for the traditional detection method of aircraft skin, such as low efficiency, long working period and poor recognition, a propeller thrust adsorption climbing robot which can independently complete aircraft skin detection has been developed. Firstly, according to the application background of wall-climbing robot, the mechanical structure design of the robot was carried out. With the crawler drive as its moving mechanism, the corresponding crawler deformation mechanism was designed to improve its adaptive barrier crossing performance, and the propeller was used as the thrust to provide its reverse operation adsorption capacity. Secondly, the stability of climbing movement is analyzed. Finally, the kinematics model for the robot is established, and its obstacle crossing ability is analyzed. Then the feasibility of its application in aircraft skin detection is demonstrated.












2021, 40(4): 649-656.
doi: 10.13433/j.cnki.1003-8728.20200088
Abstract:
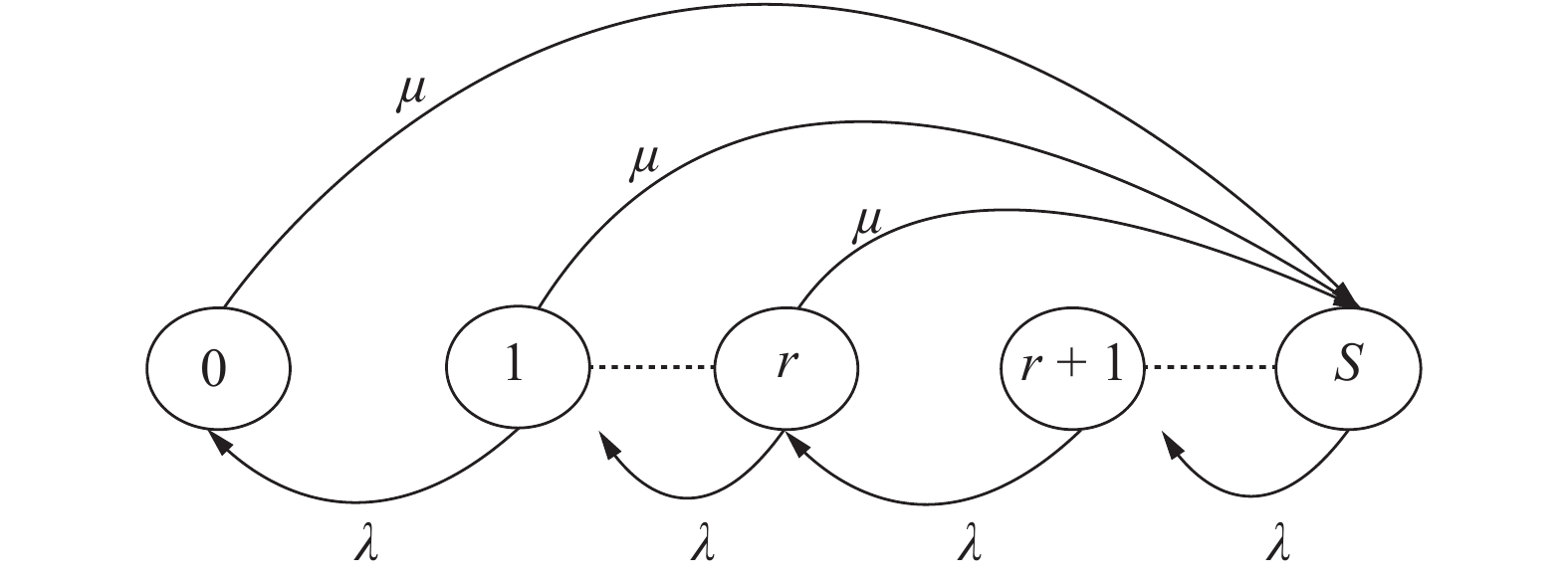
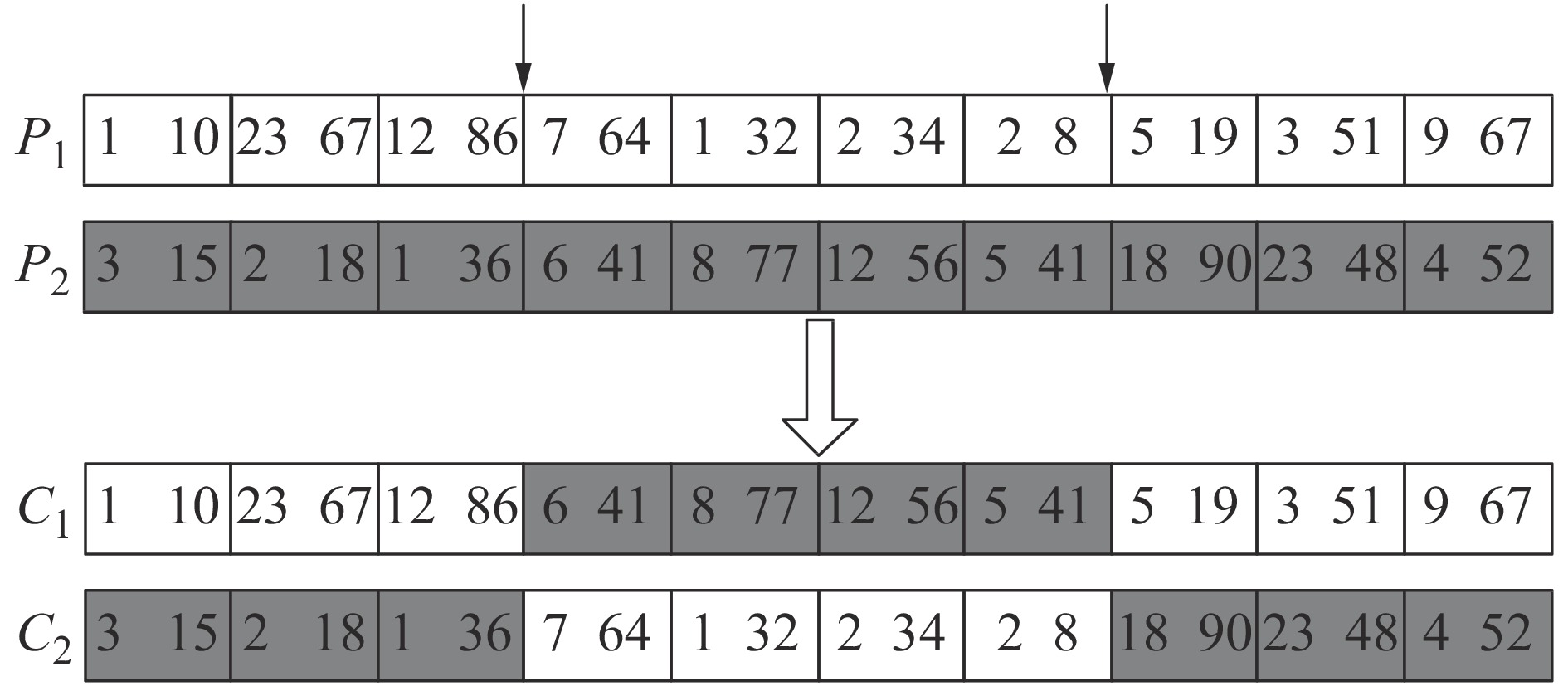
This article establishes an inventory control model that considers the importance of spare parts, and uses the proposed BGA algorithm (BAS-Genetic algorithm) to achieve fast convergence and better total cost control. Firstly, based on the principle of minimizing inventory cost, the objective function of inventory model is established. Secondly, the inventory control model is constructed under the constraints of the service level based on importance. According to the inventory control strategy model considering the importance of maintenance spare parts, this paper proposes the BGA algorithm for the search of the optimal inventory control strategy solution. Through MATLAB simulation, comparing the BGA operation results with traditional genetic algorithms, we can find that the BGA algorithm converges faster than the GA (Genetic algorithm) convergence, and the calculated objective function cost is smaller, and it is not easy to fall into a local optimum.
This article establishes an inventory control model that considers the importance of spare parts, and uses the proposed BGA algorithm (BAS-Genetic algorithm) to achieve fast convergence and better total cost control. Firstly, based on the principle of minimizing inventory cost, the objective function of inventory model is established. Secondly, the inventory control model is constructed under the constraints of the service level based on importance. According to the inventory control strategy model considering the importance of maintenance spare parts, this paper proposes the BGA algorithm for the search of the optimal inventory control strategy solution. Through MATLAB simulation, comparing the BGA operation results with traditional genetic algorithms, we can find that the BGA algorithm converges faster than the GA (Genetic algorithm) convergence, and the calculated objective function cost is smaller, and it is not easy to fall into a local optimum.