Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2020 Vol. 39, No. 8
Display Method:
2020, 39(8): 1149-1155.
doi: 10.13433/j.cnki.1003-8728.20190269
 PDF 1284KB
PDF 1284KB
Abstract:
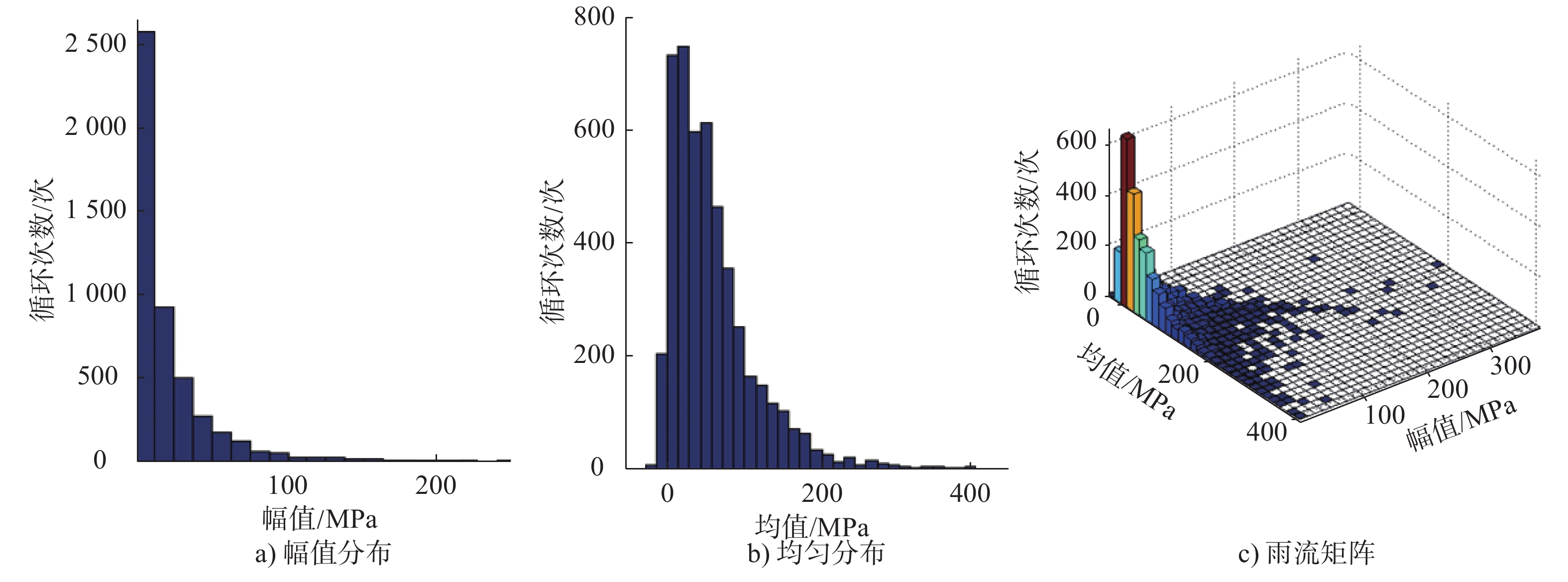
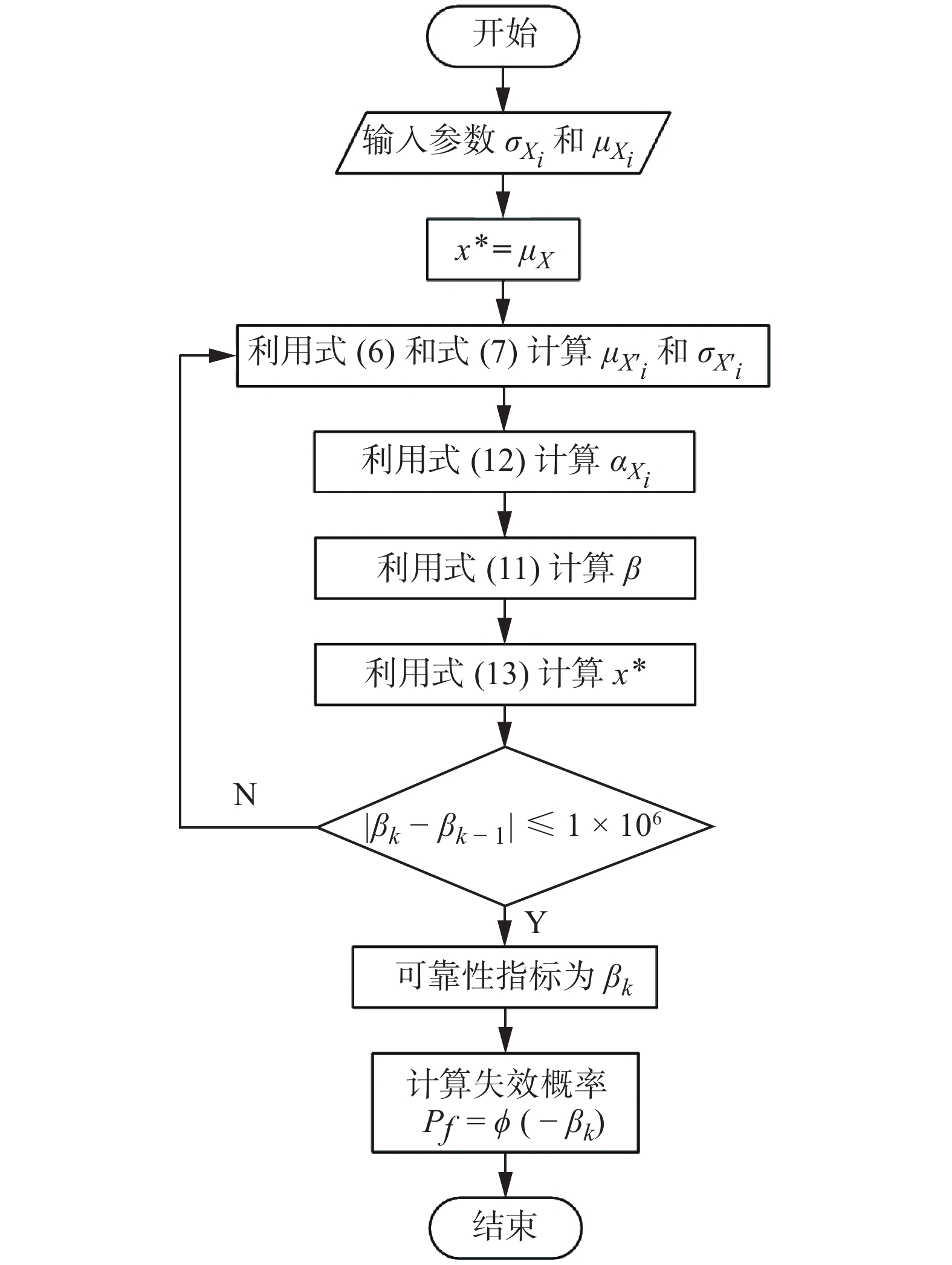
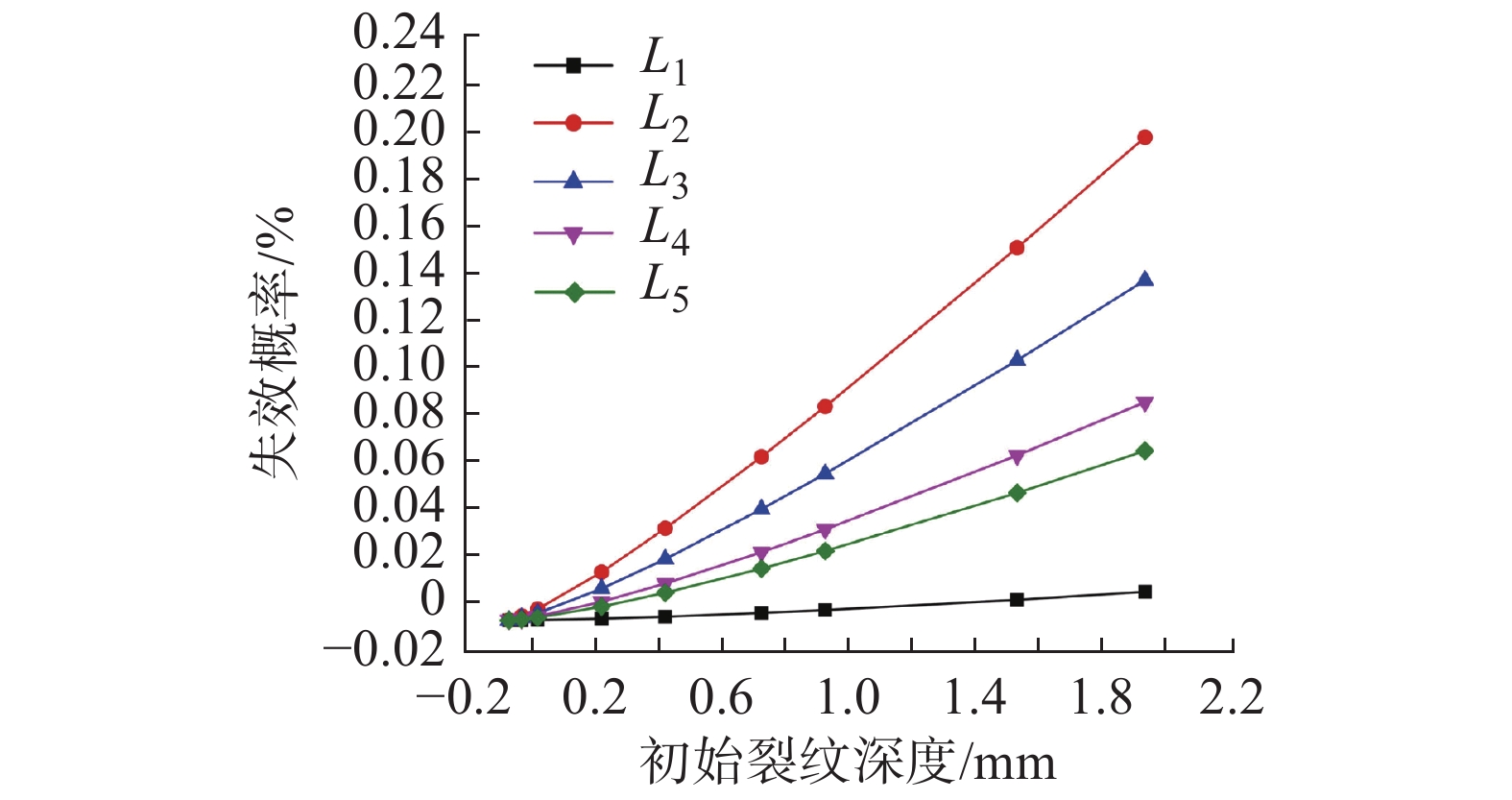
Cutter saddle welding is the part in TBM (Full face rock tunnel boring machine) cutterhead where fatigue damage most likely occurred. A model for cracks extension reliability based on the linear elastic fracture mechanics was built with crack fatigue life as basic variable, and JC method was used to calculate the fatigue reliability of cutter saddle weld under different cutter loads obtained experimentally and analyze the influence of the different factors on the failure probability. The results show that the failure probability of center cutter saddle weld is smaller than that of normal cutter, and the failure probability of normal cutter decreases with increasing of installation radius; the failure probability of cutter saddle weld increases dramatically with the increasing of initial crack depth, but the change of critical crack depth has slight effect on the failure probability; the larger the crack shape ratio is, the smaller the failure probability of cutter saddle weld is.
Cutter saddle welding is the part in TBM (Full face rock tunnel boring machine) cutterhead where fatigue damage most likely occurred. A model for cracks extension reliability based on the linear elastic fracture mechanics was built with crack fatigue life as basic variable, and JC method was used to calculate the fatigue reliability of cutter saddle weld under different cutter loads obtained experimentally and analyze the influence of the different factors on the failure probability. The results show that the failure probability of center cutter saddle weld is smaller than that of normal cutter, and the failure probability of normal cutter decreases with increasing of installation radius; the failure probability of cutter saddle weld increases dramatically with the increasing of initial crack depth, but the change of critical crack depth has slight effect on the failure probability; the larger the crack shape ratio is, the smaller the failure probability of cutter saddle weld is.




2020, 39(8): 1156-1162.
doi: 10.13433/j.cnki.1003-8728.20190264
Abstract:
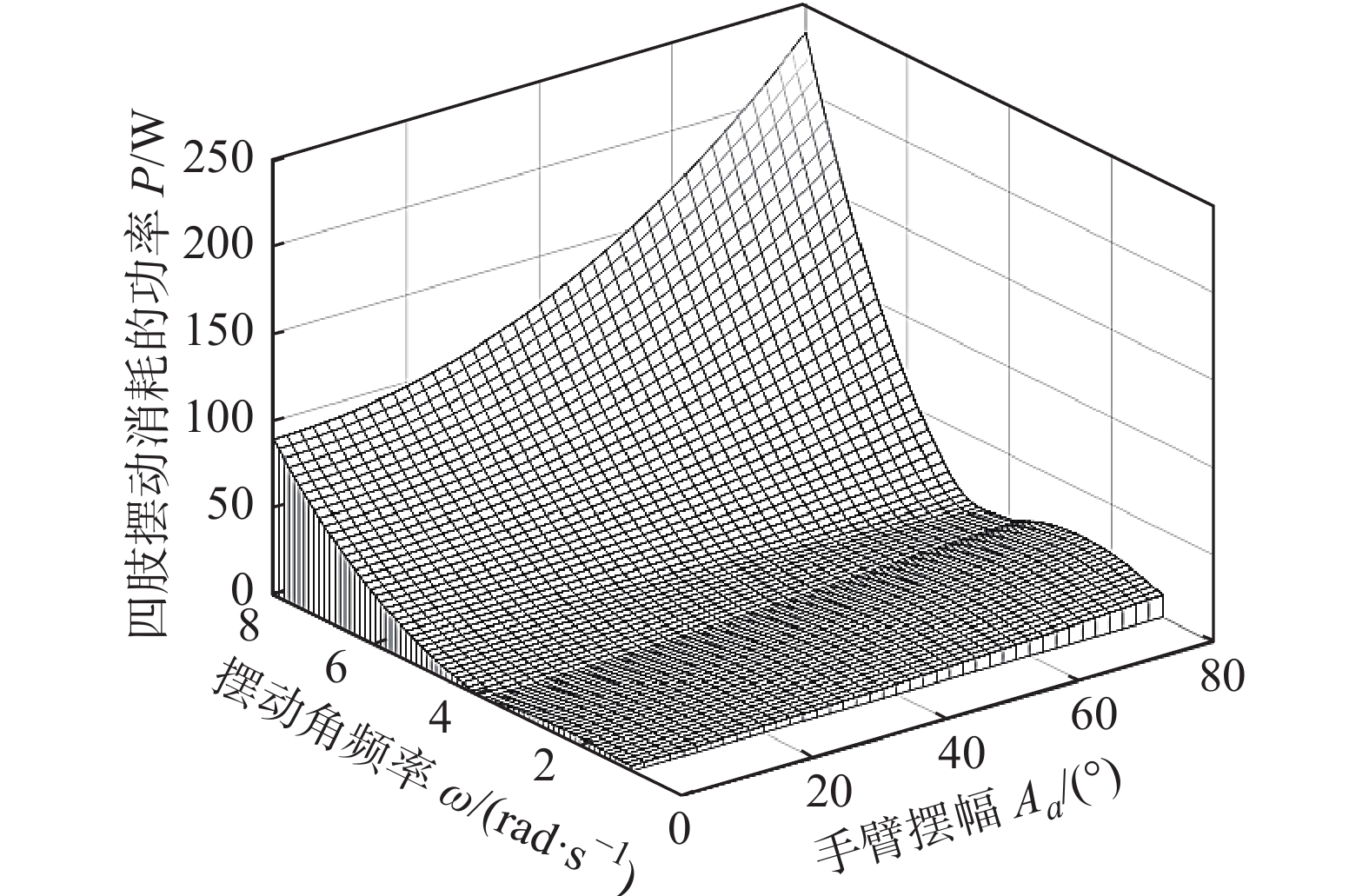
The influence of the swing parameters of the upper and lower limbs of a humanoid robot on its walking energy consumption is studied. The swing mechanism of a limb with low energy consumption is proposed. Abstracting the limb into a single swing, a simplified model of the humanoid robot is established and then used to solve the robot's turning moment during its walking. The approximate solution of the pendulum angle under the non-small angle hypothesis is used to describe the variation of the limb's swing angle. The energy consumption mechanism of the walking is analyzed, and the method of calculating energy consumption under the simplified model is given. Taking the humanoid robot model as example, the influence of the swing frequency of the limb on the power consumption of the robot during its walking is studied. Given the walking speed, the energy-saving planning strategy of upper and lower limbs' swing amplitude/frequency was proposed under the premise that the turning moment of the robot varies in a certain range. The calculation results show that the limb swing law proposed in the paper helps to reduce the energy consumption of the walking humanoid robot.
The influence of the swing parameters of the upper and lower limbs of a humanoid robot on its walking energy consumption is studied. The swing mechanism of a limb with low energy consumption is proposed. Abstracting the limb into a single swing, a simplified model of the humanoid robot is established and then used to solve the robot's turning moment during its walking. The approximate solution of the pendulum angle under the non-small angle hypothesis is used to describe the variation of the limb's swing angle. The energy consumption mechanism of the walking is analyzed, and the method of calculating energy consumption under the simplified model is given. Taking the humanoid robot model as example, the influence of the swing frequency of the limb on the power consumption of the robot during its walking is studied. Given the walking speed, the energy-saving planning strategy of upper and lower limbs' swing amplitude/frequency was proposed under the premise that the turning moment of the robot varies in a certain range. The calculation results show that the limb swing law proposed in the paper helps to reduce the energy consumption of the walking humanoid robot.



2020, 39(8): 1163-1170.
doi: 10.13433/j.cnki.1003-8728.20190253
Abstract:
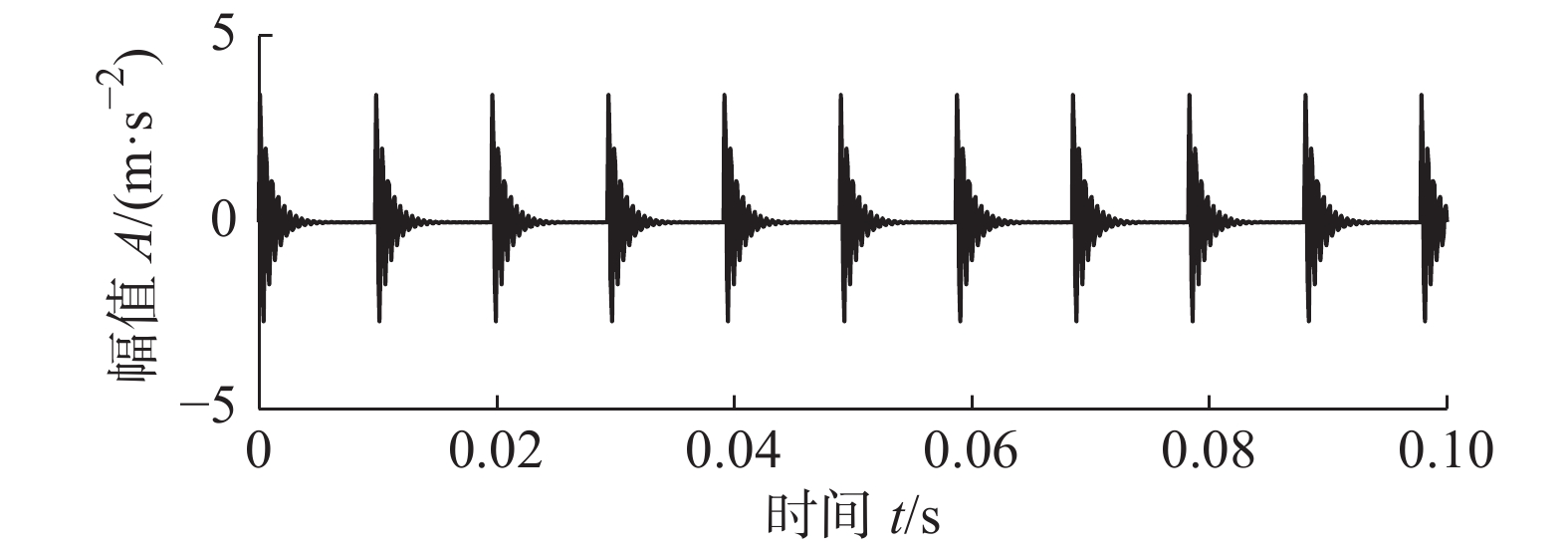
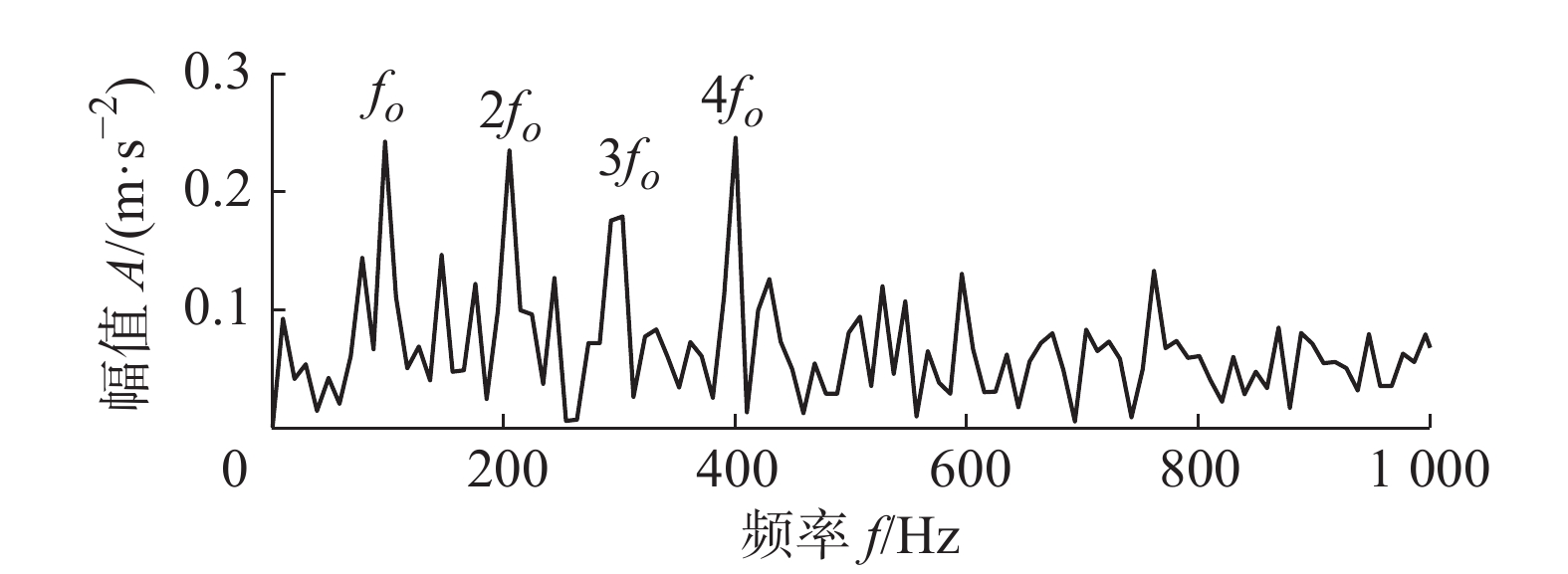
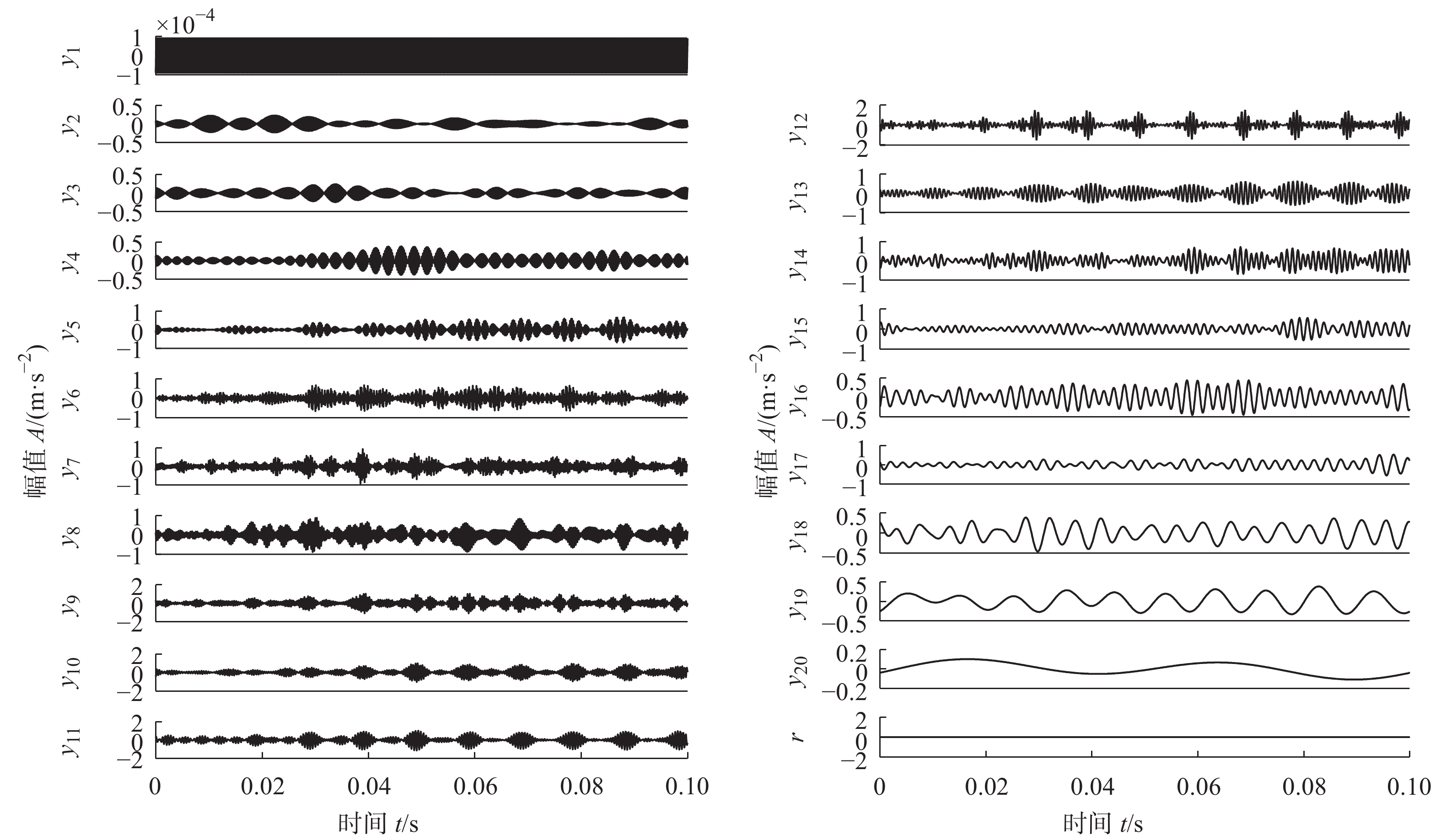
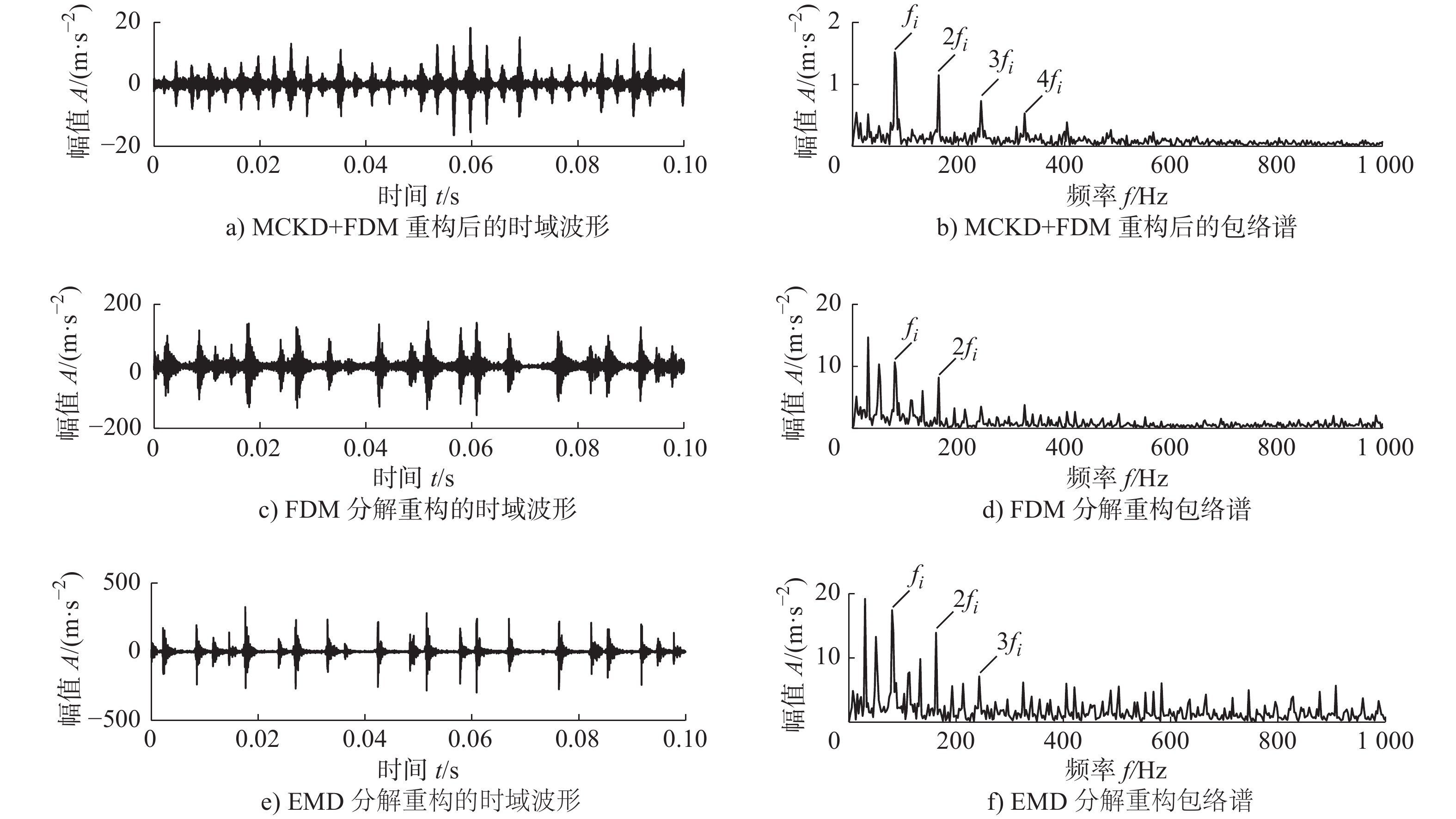
Aiming at the problem that it is difficult to extract fault features of rolling bearing form strong background noise, a fault diagnosis method based on maximum correlation kurtosis deconvolution (MCKD) and Fourier decomposition method (FDM) is proposed. First, MCKD is used to denoise the vibration signal and extract the impact component related with failure. Second, the denoising signal is decomposed by FDM, and several Fourier intrinsic band functions (FIBFs) with physical significance and one residual component are obtained. Third, the correlation between each FIBF and denoising signal is computed to select the optimal components that contain main fault information for reconstruction. Finally, the envelope spectrum of the reconstructed signal is calculated and the fault information is read from envelope spectrum for diagnostics. The proposed fault diagnosis method is applied to simulation and experimental data analysis of faulty rolling bearing by comparing with the existing methods. The analysis results show that the proposed method is superior to the existing methods of comparison.
Aiming at the problem that it is difficult to extract fault features of rolling bearing form strong background noise, a fault diagnosis method based on maximum correlation kurtosis deconvolution (MCKD) and Fourier decomposition method (FDM) is proposed. First, MCKD is used to denoise the vibration signal and extract the impact component related with failure. Second, the denoising signal is decomposed by FDM, and several Fourier intrinsic band functions (FIBFs) with physical significance and one residual component are obtained. Third, the correlation between each FIBF and denoising signal is computed to select the optimal components that contain main fault information for reconstruction. Finally, the envelope spectrum of the reconstructed signal is calculated and the fault information is read from envelope spectrum for diagnostics. The proposed fault diagnosis method is applied to simulation and experimental data analysis of faulty rolling bearing by comparing with the existing methods. The analysis results show that the proposed method is superior to the existing methods of comparison.






2020, 39(8): 1184-1190.
doi: 10.13433/j.cnki.1003-8728.20190256
Abstract:
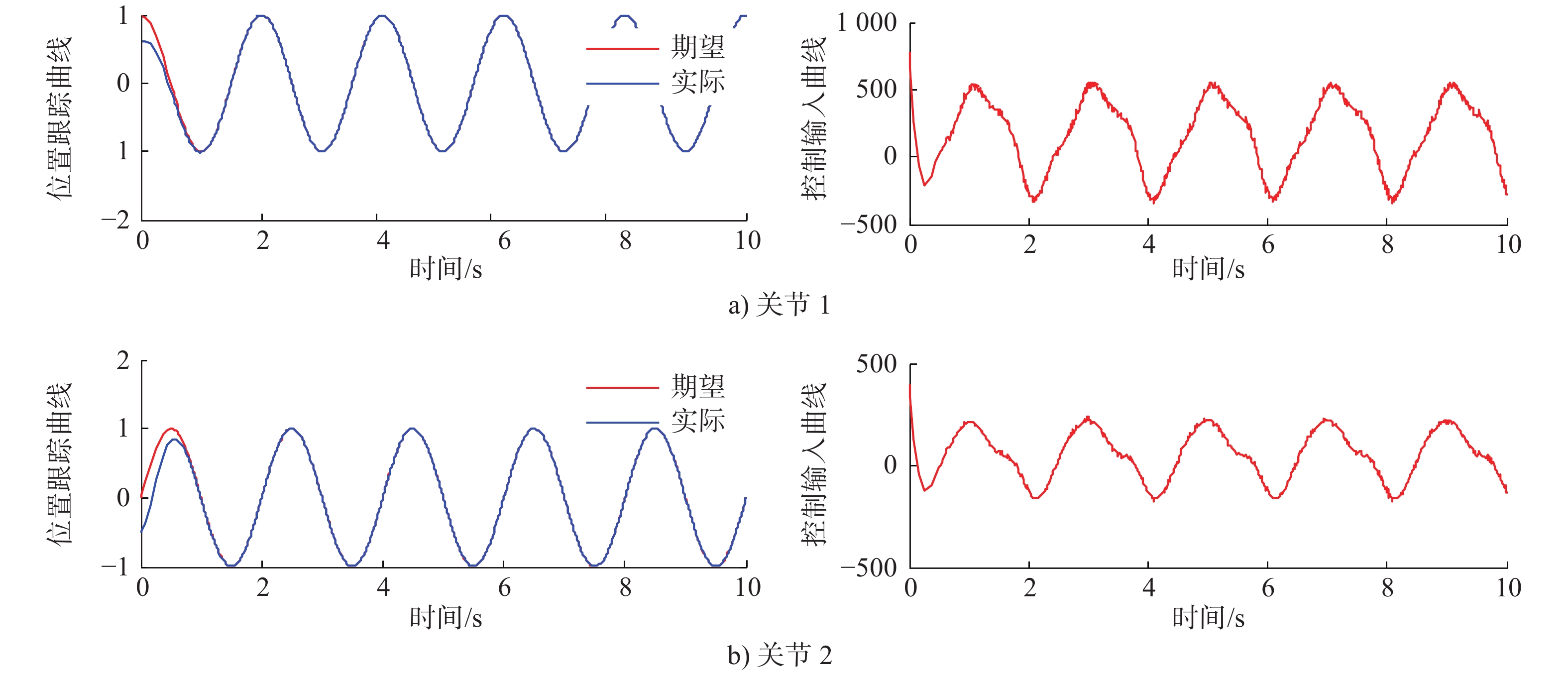
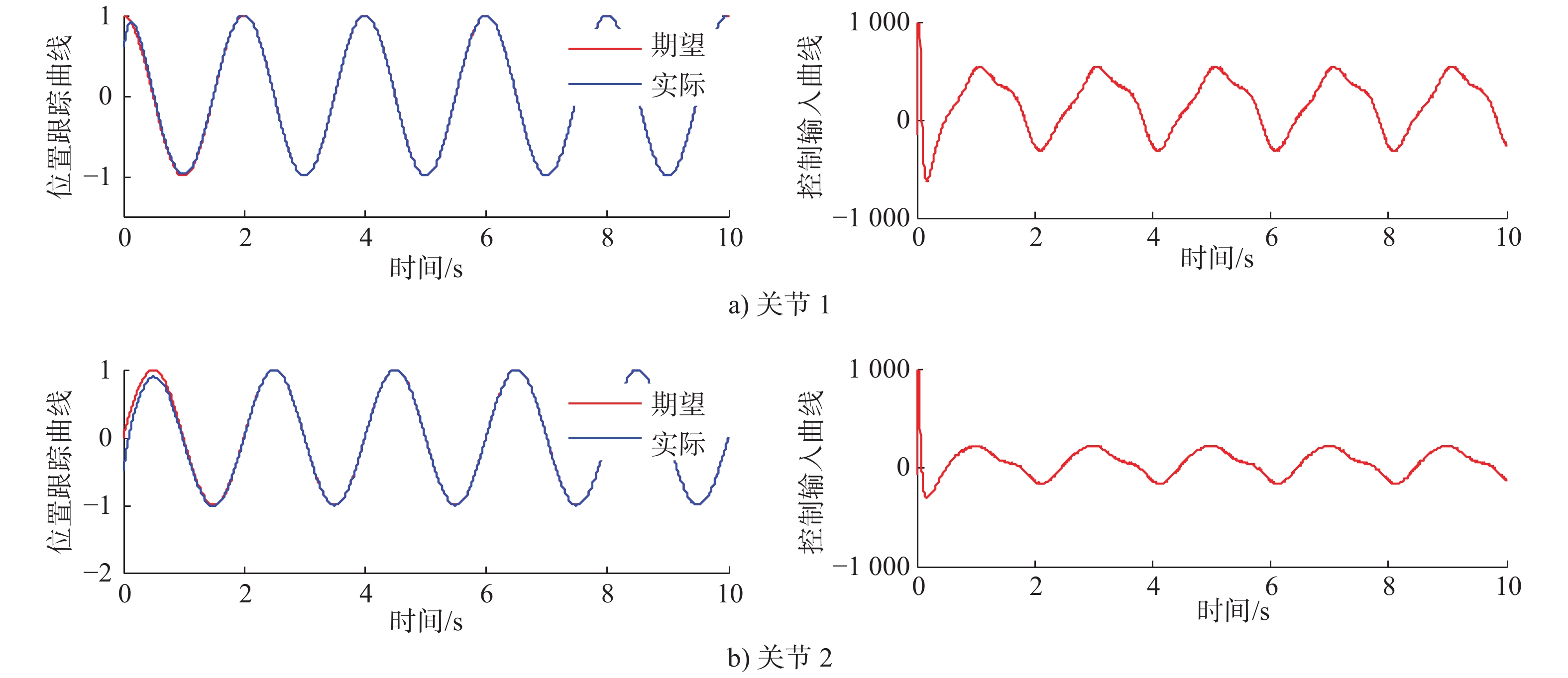
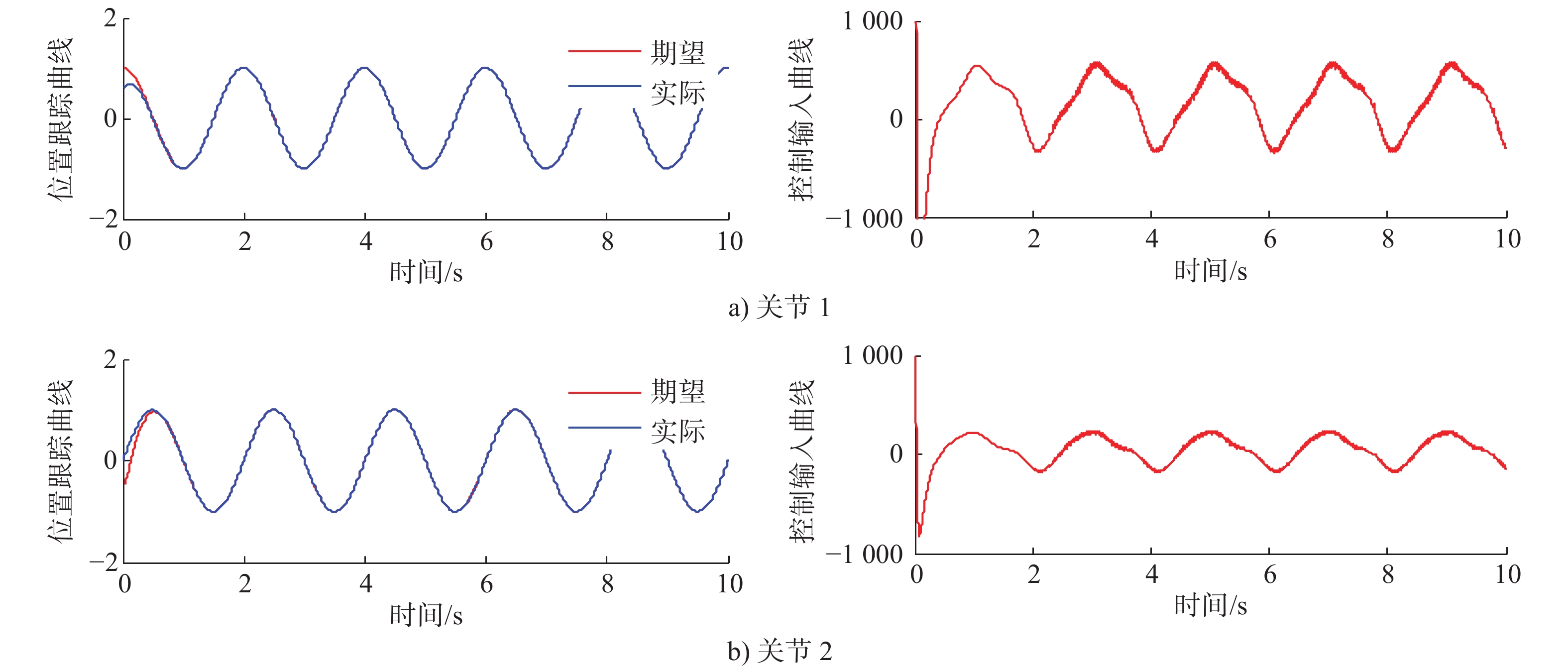
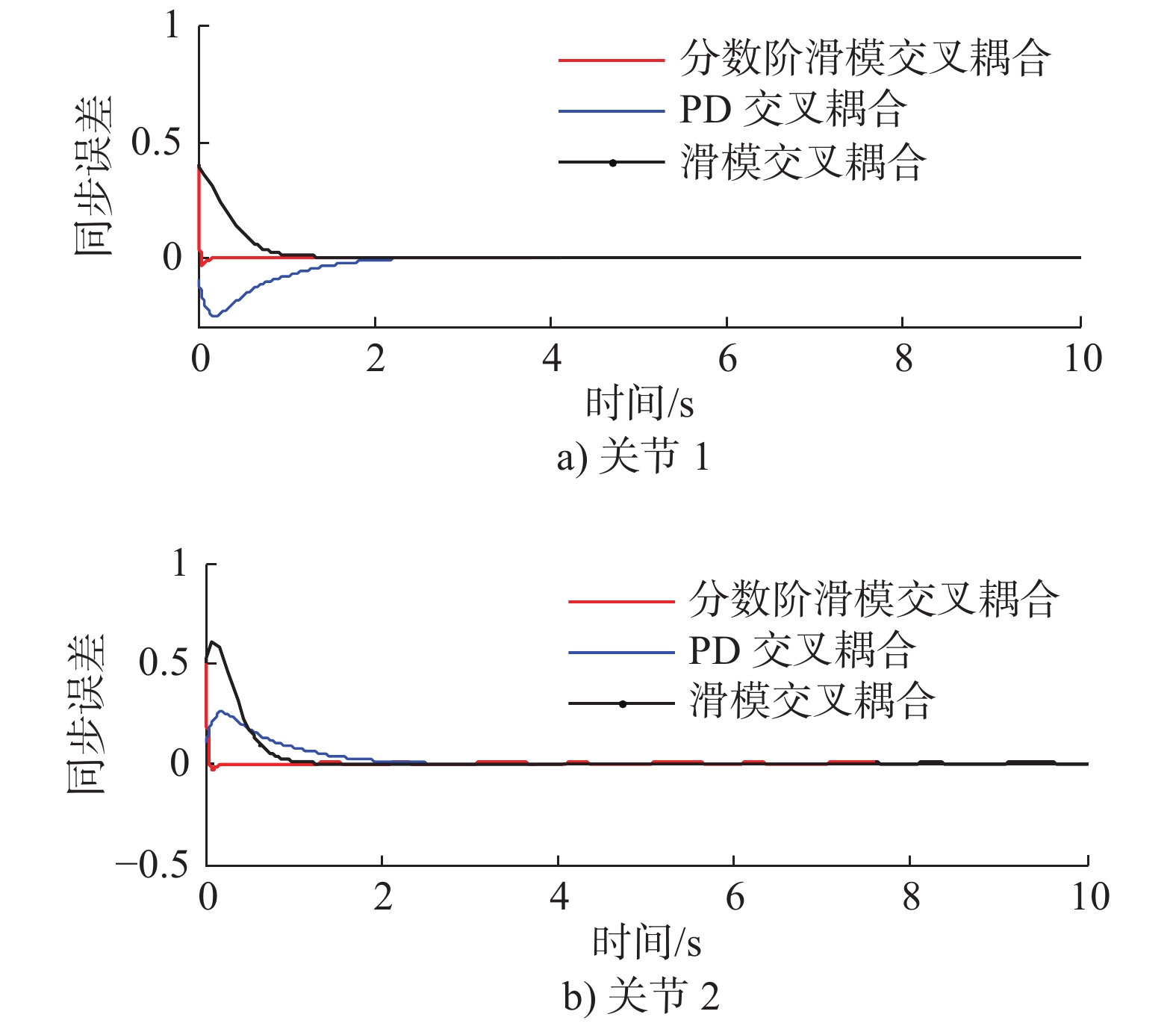
In order to synchronize the joints of the manipulator with high precision and improve the tracking accuracy, position tracking control strategy combining fractional calculus and sliding mode control is proposed for the single joint of the manipulator. Considering the coupling relationship between the joints of the manipulator, a fractional sliding mode cross-coupling control strategy is proposed. The asymptotic stability of the proposed control strategy is proved theoretically. The experimental results show that the angular displacement adjustment time of the two-joint manipulator is 0.53 s and 0.58 s respectively by using the position tracking control strategy proposed in this paper, which is superior to the traditional sliding mode control strategy of 1.31 s and 1.24 s. The root mean square error of the position error is reduced by 1.6×10−4, 6.51×10−4 compared with the traditional sliding mode control strategy. The rise time and stability time of the output response obtained by the manipulator is better than those of the PD cross-coupling control strategy and the sliding mode cross-coupling control strategy, and the root mean square error of the synchronization error is 0.022 5, 0.031 6, which is better than 0.133, 0.926 of PD cross-coupling and 0.057 3, 0.052 3 of sliding mode cross-coupling. The experimental results show the effectiveness of the control method proposed.
In order to synchronize the joints of the manipulator with high precision and improve the tracking accuracy, position tracking control strategy combining fractional calculus and sliding mode control is proposed for the single joint of the manipulator. Considering the coupling relationship between the joints of the manipulator, a fractional sliding mode cross-coupling control strategy is proposed. The asymptotic stability of the proposed control strategy is proved theoretically. The experimental results show that the angular displacement adjustment time of the two-joint manipulator is 0.53 s and 0.58 s respectively by using the position tracking control strategy proposed in this paper, which is superior to the traditional sliding mode control strategy of 1.31 s and 1.24 s. The root mean square error of the position error is reduced by 1.6×10−4, 6.51×10−4 compared with the traditional sliding mode control strategy. The rise time and stability time of the output response obtained by the manipulator is better than those of the PD cross-coupling control strategy and the sliding mode cross-coupling control strategy, and the root mean square error of the synchronization error is 0.022 5, 0.031 6, which is better than 0.133, 0.926 of PD cross-coupling and 0.057 3, 0.052 3 of sliding mode cross-coupling. The experimental results show the effectiveness of the control method proposed.



2020, 39(8): 1191-1195.
doi: 10.13433/j.cnki.1003-8728.20200109
Abstract:
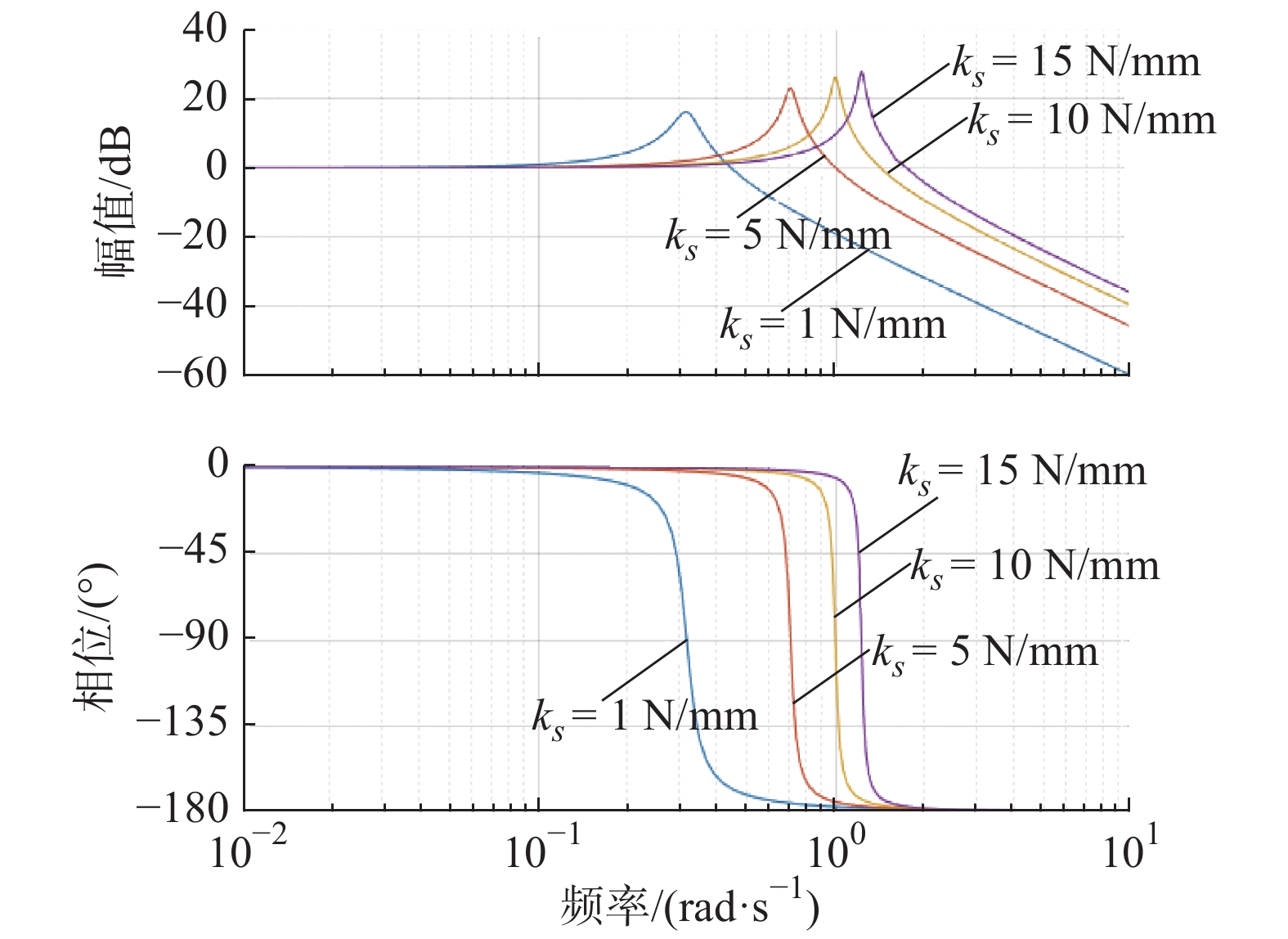
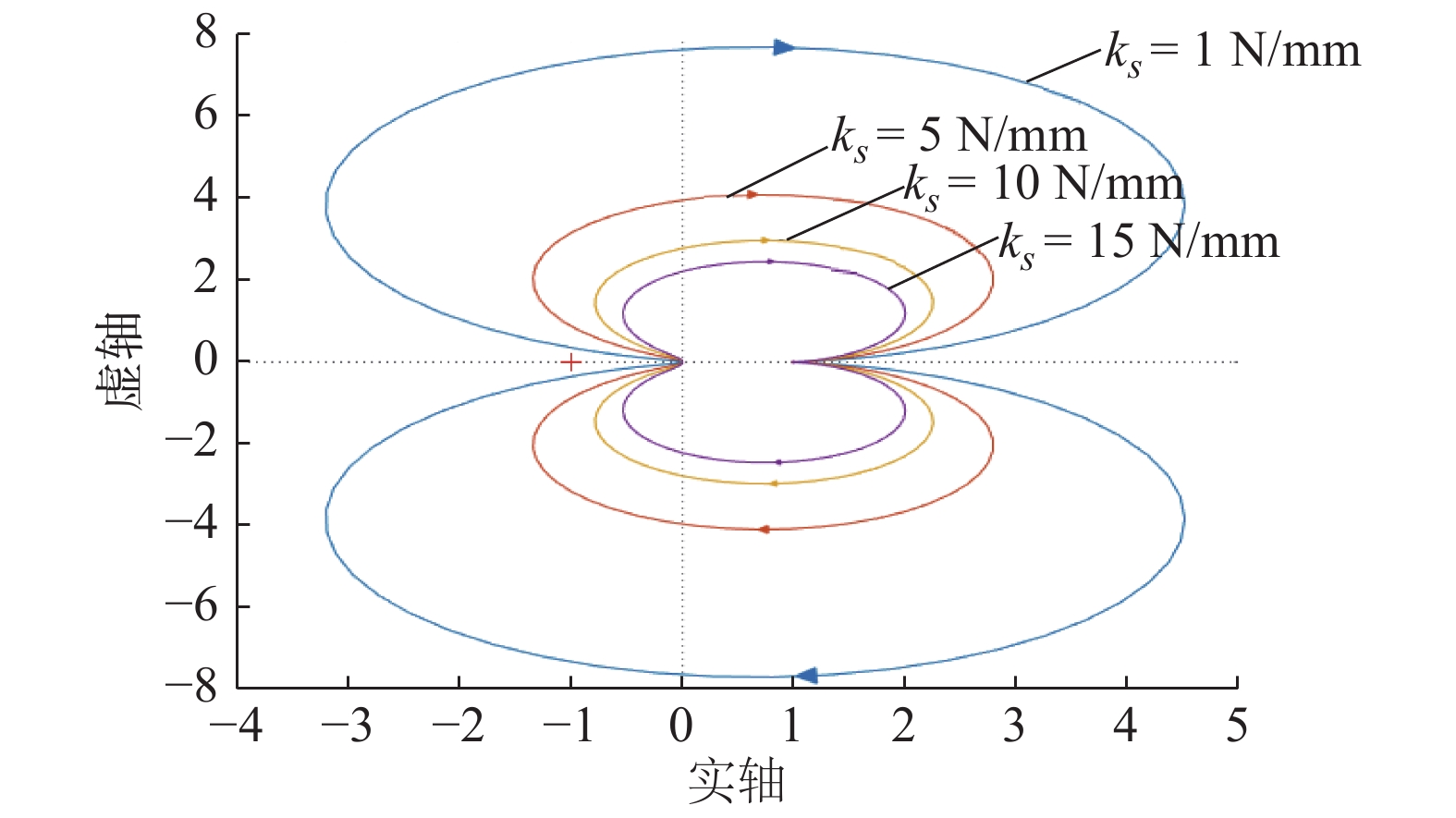
In order to improve the adaptability of rescue robots in unstructured environment, the concept of equivalent mass of the transmission mechanism is introduced, and the influence of the internal damping of the motor on the dynamic model of the elastic actuator is considered, and the dynamic model of the series elastic actuator based on the force source drive is established. Using PID unit negative feedback control method, the open-loop transfer function and closed-loop transfer function of the flexible joint system are obtained by Laplace transform, and the stability of the system is analyzed using Nyquist criterion and Bode diagram. Through simulation experiments, the system′s step signal tracking response is obtained. By comparing the simulation results with the analysis results of the frequency domain characteristics, the rationality and stability of the flexible joint structure design of the rescue robot are further verified.
In order to improve the adaptability of rescue robots in unstructured environment, the concept of equivalent mass of the transmission mechanism is introduced, and the influence of the internal damping of the motor on the dynamic model of the elastic actuator is considered, and the dynamic model of the series elastic actuator based on the force source drive is established. Using PID unit negative feedback control method, the open-loop transfer function and closed-loop transfer function of the flexible joint system are obtained by Laplace transform, and the stability of the system is analyzed using Nyquist criterion and Bode diagram. Through simulation experiments, the system′s step signal tracking response is obtained. By comparing the simulation results with the analysis results of the frequency domain characteristics, the rationality and stability of the flexible joint structure design of the rescue robot are further verified.







2020, 39(8): 1196-1201.
doi: 10.13433/j.cnki.1003-8728.20190208
Abstract:
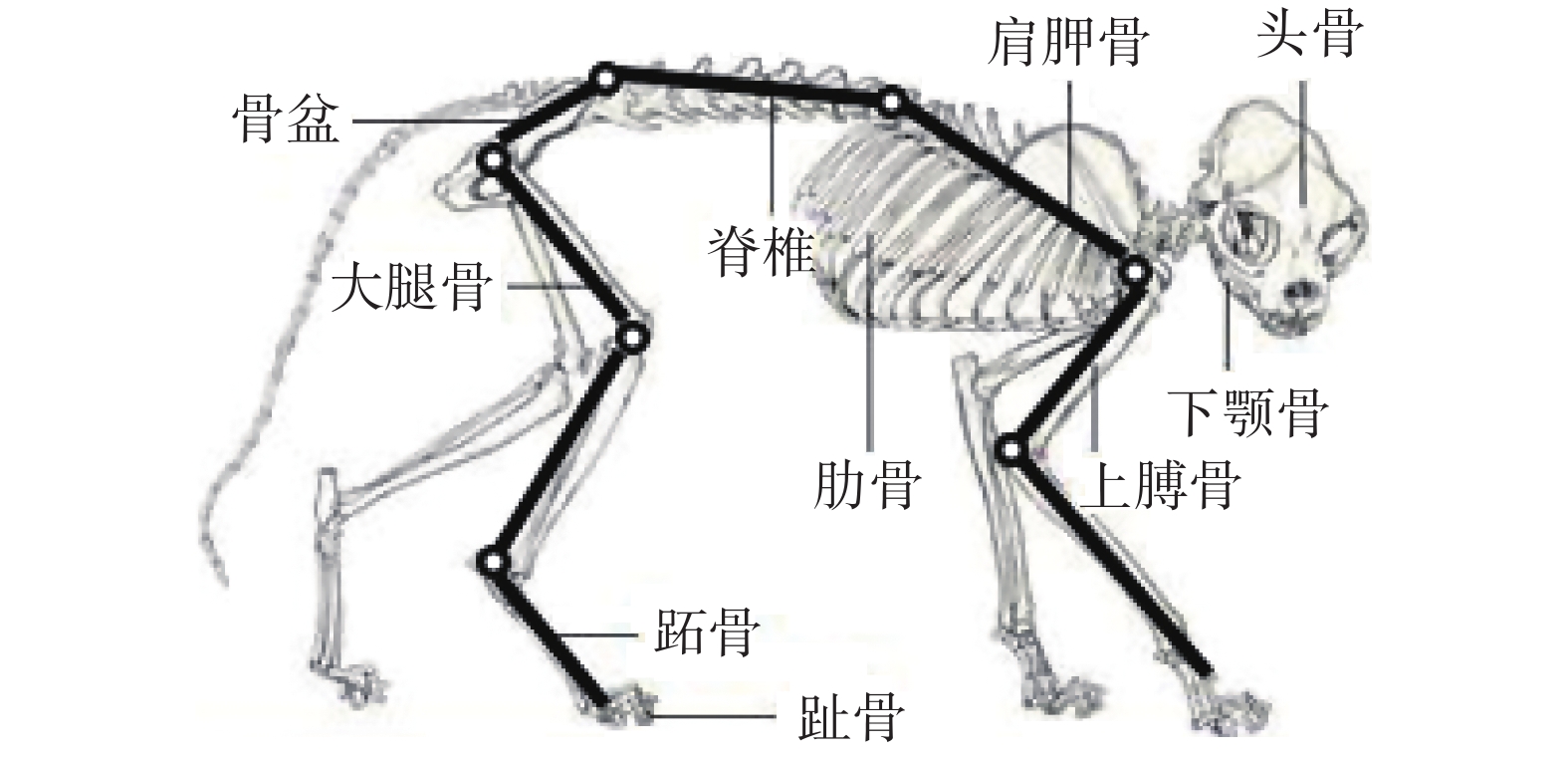
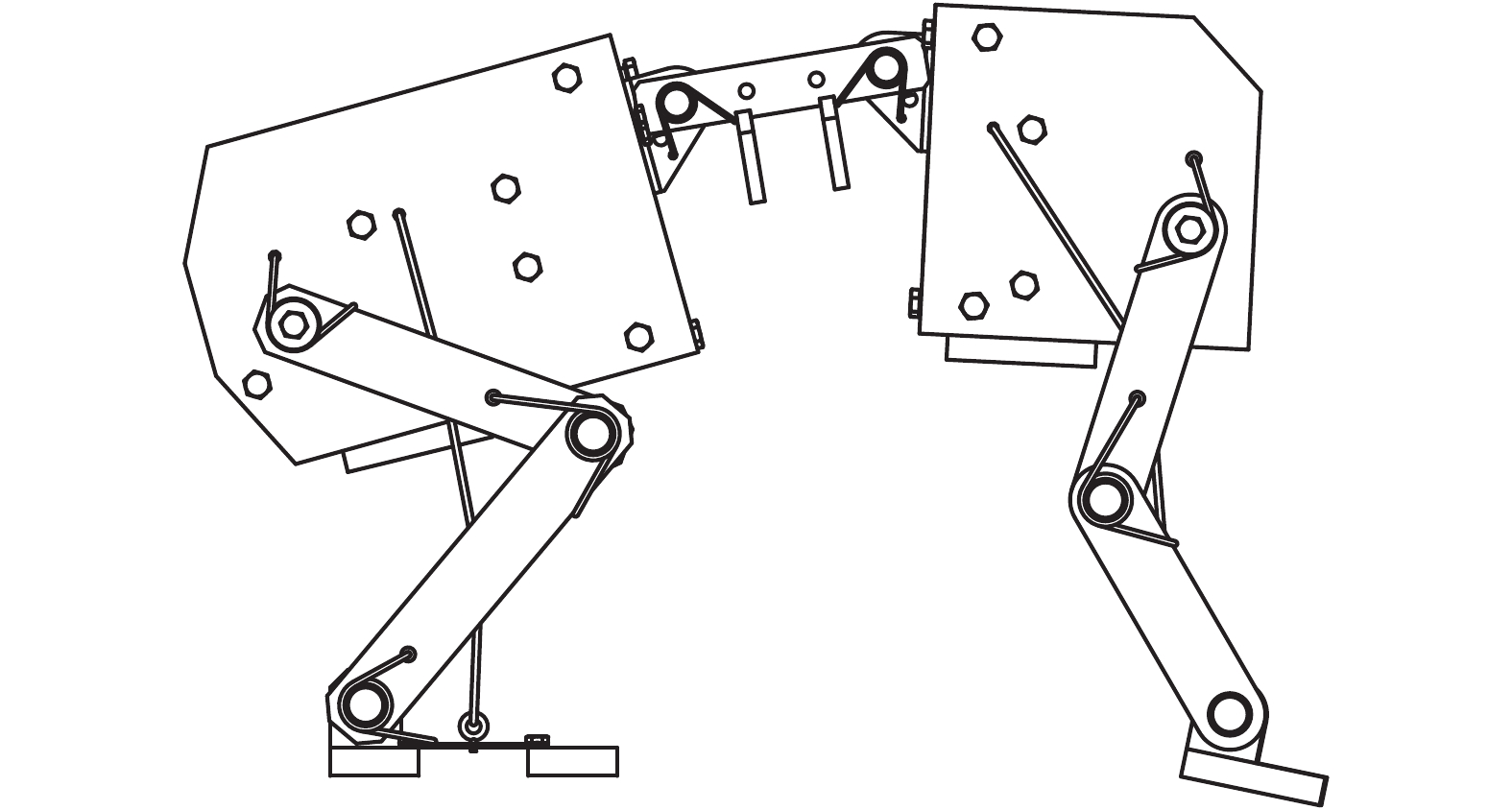
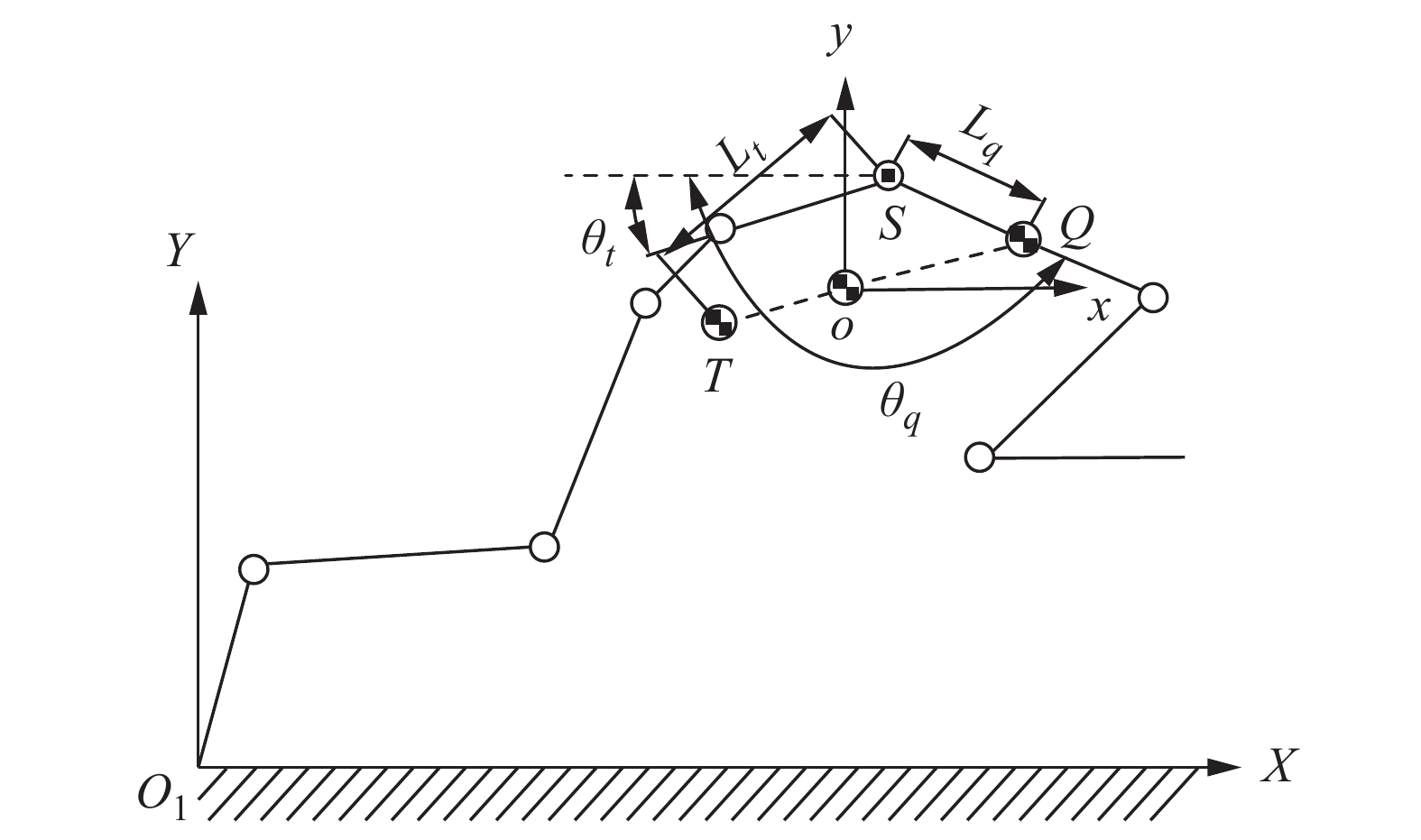
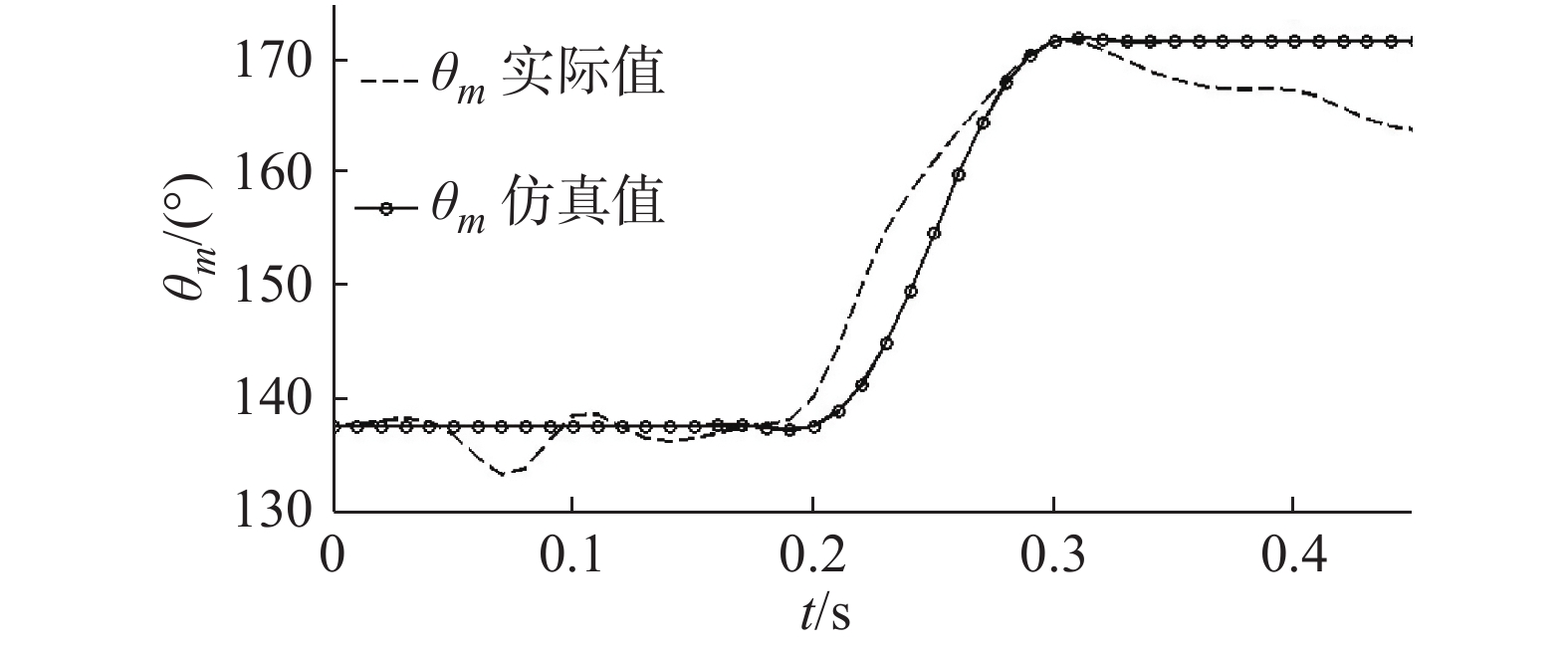
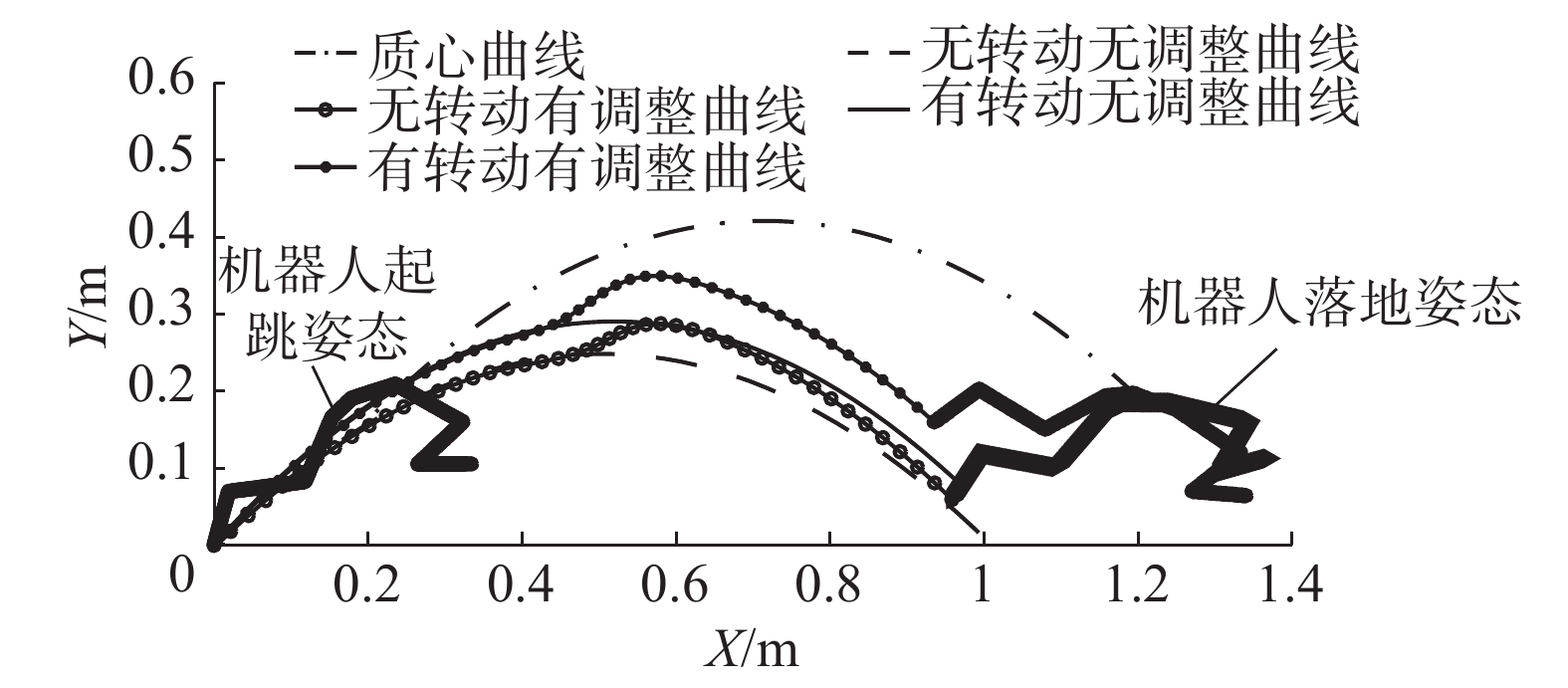
A domestic cat is an animal that is good at jumping. The analysis of the jumping of the domestic cat helps to inspire the mechanism of the hopping robot and improve the flexibility of the robot jumping. Taking the domestic cat as a model, a model for cat-like mechanism with a waist structure was proposed, a cat-like robot was developed, and a robotic aerial dynamics model was established by using momentum conservation and Lagrange equation. Finally, the robot follows the waist movement of a cat jumping process to observe the motion trajectory of the hind-toe of the robot in different situations in the air. It is concluded that the robot′s attitude adjustment by using the waist in the air allows the robot to cross higher obstacles, providing a reference for the robot to respond to emergencies.
A domestic cat is an animal that is good at jumping. The analysis of the jumping of the domestic cat helps to inspire the mechanism of the hopping robot and improve the flexibility of the robot jumping. Taking the domestic cat as a model, a model for cat-like mechanism with a waist structure was proposed, a cat-like robot was developed, and a robotic aerial dynamics model was established by using momentum conservation and Lagrange equation. Finally, the robot follows the waist movement of a cat jumping process to observe the motion trajectory of the hind-toe of the robot in different situations in the air. It is concluded that the robot′s attitude adjustment by using the waist in the air allows the robot to cross higher obstacles, providing a reference for the robot to respond to emergencies.


2020, 39(8): 1211-1216.
doi: 10.13433/j.cnki.1003-8728.20190268
Abstract:
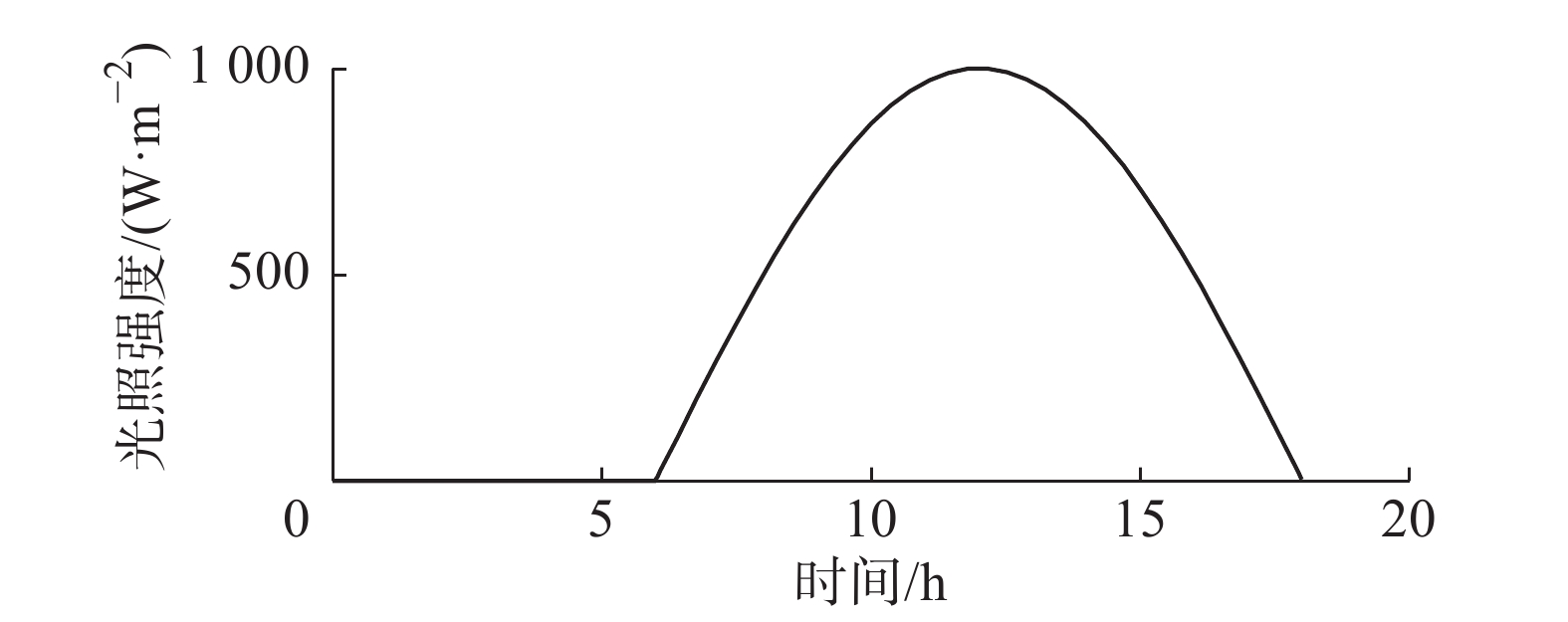
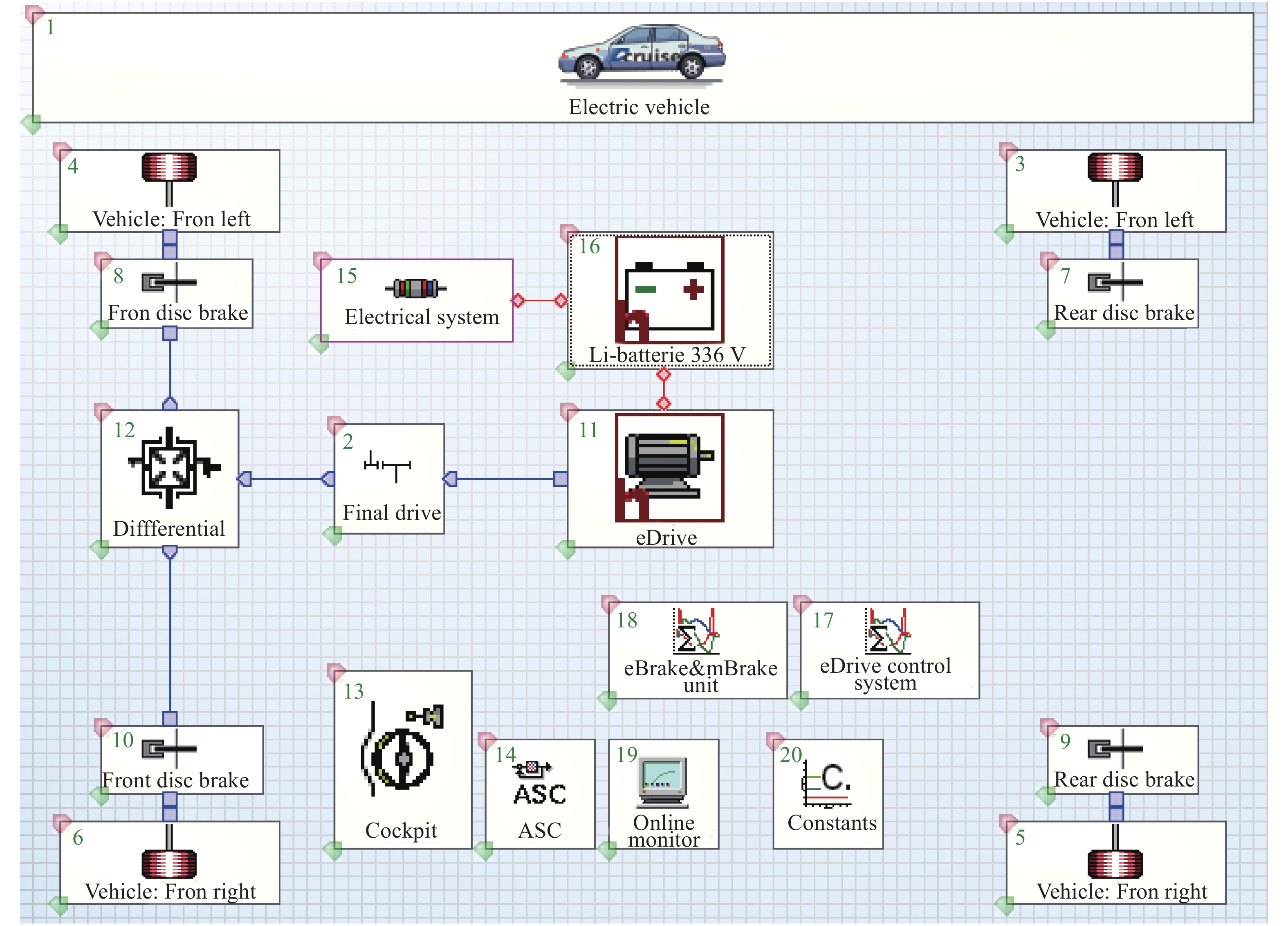
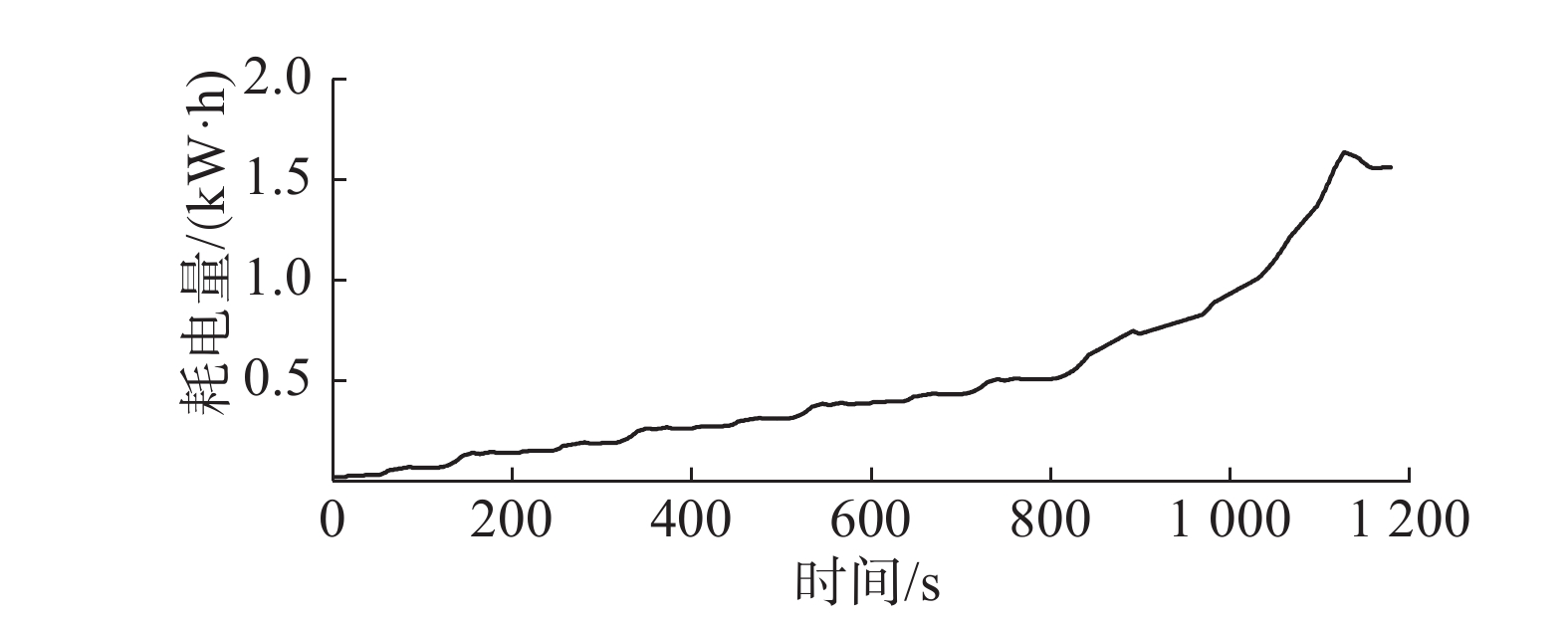
A solar electric vehicle configuration based on hub motor is proposed. Based on a B-class vehicle, the selection and matching of key assembly parameters such as solar cell, battery and motor are completed. With MATLAB/Simulink, the solar cell simulation model is built. The illumination characteristics of solar cells were simulated and analyzed. In order to verify the economics of the present configuration, an economic verification model was built based on AVL Cruise. The economics of the vehicle was verified based on NEDC conditions. The simulation results showed that when driving 50 km per day, the non-solar electric vehicle consumes 7.174 kW·h, and the solar cell generates 1.688 kW·h of electricity per day, that is, the solar cell consumes 5.486 kW·h of grid power, and the energy saving ratio is of 23.5%. When the battery capacity is the same, the non-solar pure electric vehicle has a driving range of 200 km, and the solar electric vehicle has a driving range of 240 km, the driving range increases by 20%, and the energy saving effect is remarkable. Relevant research can provide the reference for developing the solar electric vehicles in China.
A solar electric vehicle configuration based on hub motor is proposed. Based on a B-class vehicle, the selection and matching of key assembly parameters such as solar cell, battery and motor are completed. With MATLAB/Simulink, the solar cell simulation model is built. The illumination characteristics of solar cells were simulated and analyzed. In order to verify the economics of the present configuration, an economic verification model was built based on AVL Cruise. The economics of the vehicle was verified based on NEDC conditions. The simulation results showed that when driving 50 km per day, the non-solar electric vehicle consumes 7.174 kW·h, and the solar cell generates 1.688 kW·h of electricity per day, that is, the solar cell consumes 5.486 kW·h of grid power, and the energy saving ratio is of 23.5%. When the battery capacity is the same, the non-solar pure electric vehicle has a driving range of 200 km, and the solar electric vehicle has a driving range of 240 km, the driving range increases by 20%, and the energy saving effect is remarkable. Relevant research can provide the reference for developing the solar electric vehicles in China.



2020, 39(8): 1222-1229.
doi: 10.13433/j.cnki.1003-8728.20190262
Abstract:
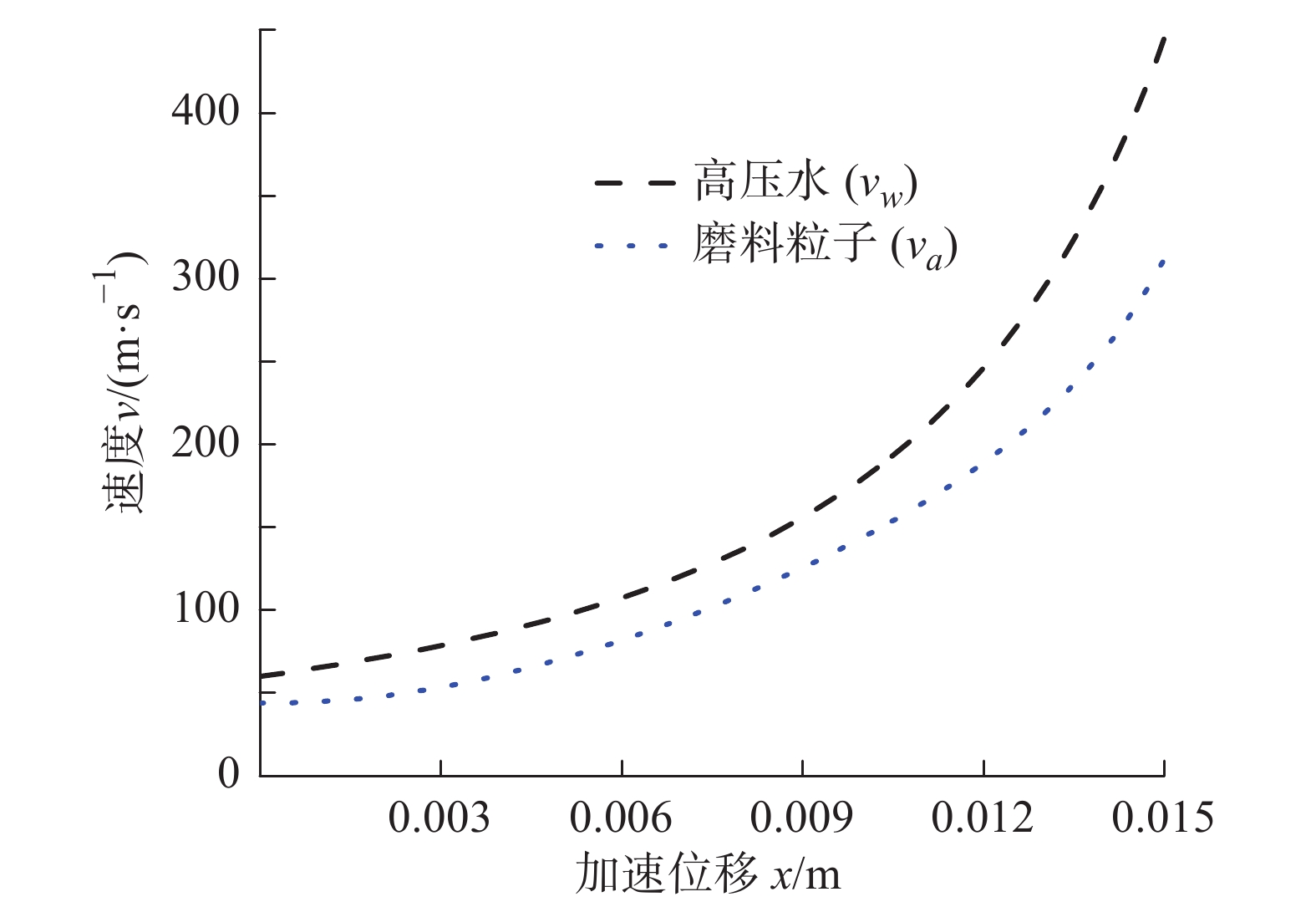
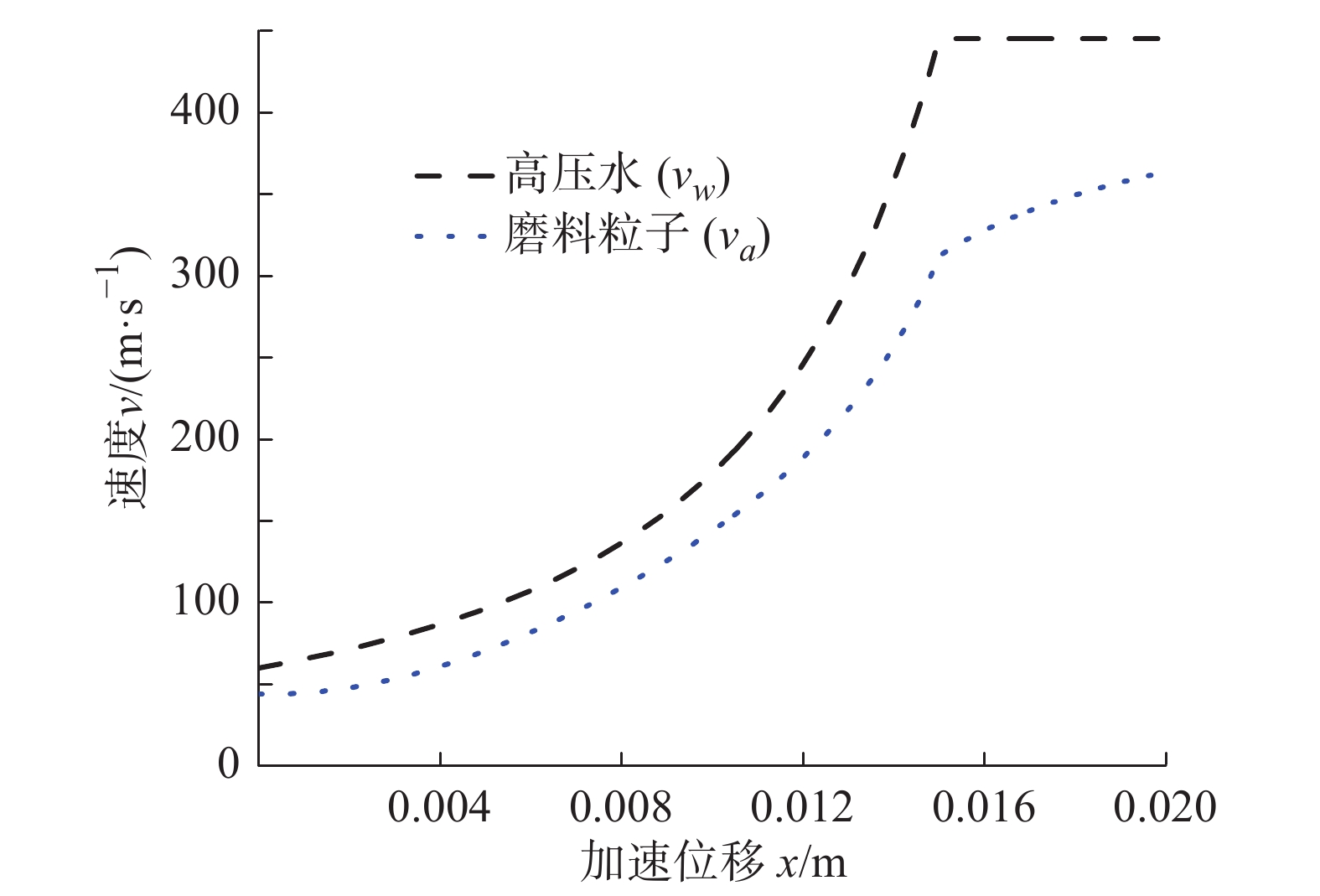
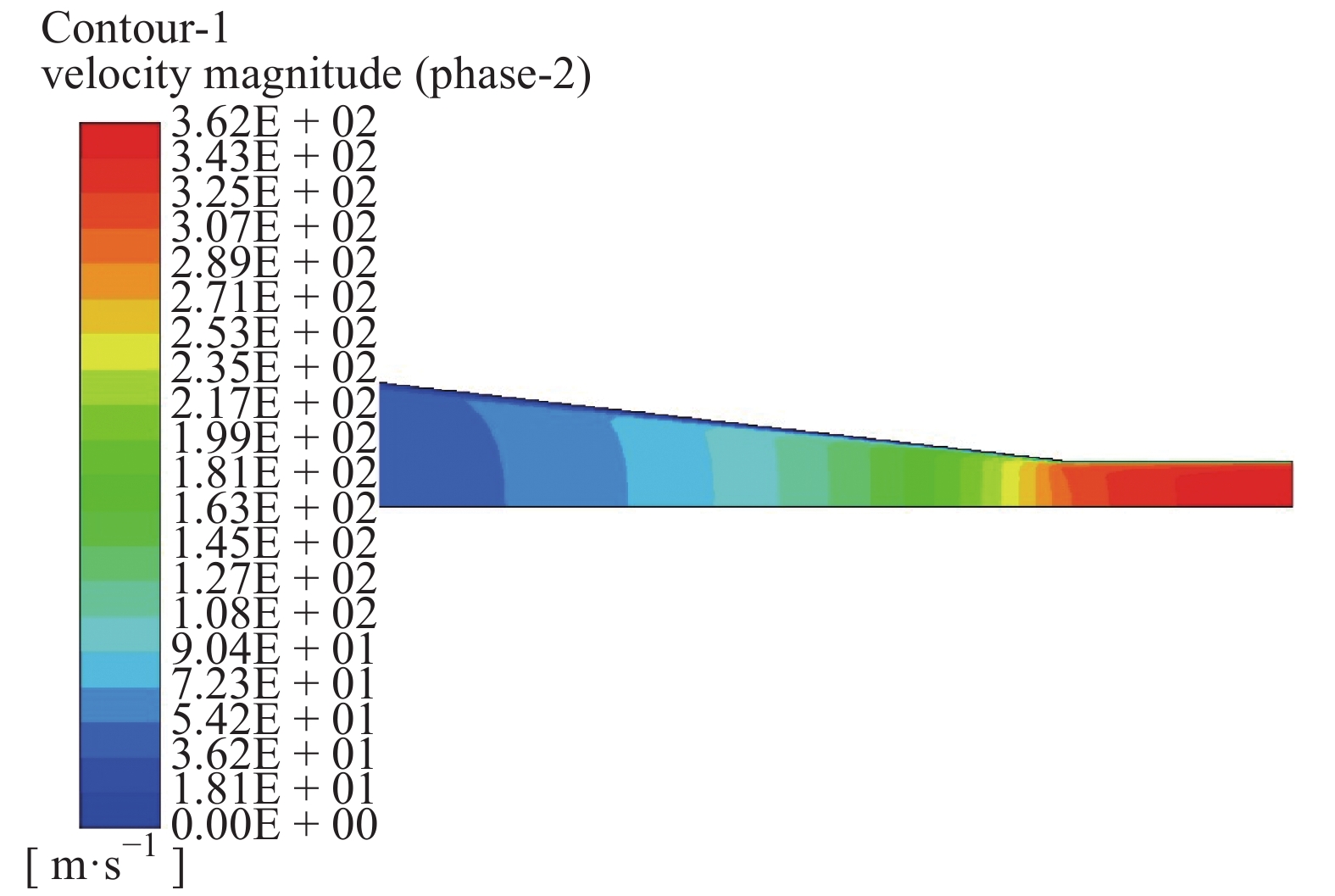
Because the force of the ultra-high pressure premixed abrasive particles in the nozzle during accelerationis not clear, we adopt the method of first dividing and then combining external forces andthen establish nonlinear equations with the unfixed point iterative method. We carry out the real-time integration with the MATLAB to build mathematical models to solve the nonlinearequations. We combine theoretical analysis with ANSYS simulation results. The simulation results on the solid-liquid two-phase flow in the nozzle indicate that theoretical analysis and established mathematical models can accurately describe the force of the abrasive particles. The acceleration process of abrasive particles when the nozzle contracts is mainly affected by viscous resistance, additional mass force and pressure strength. Theacceleration process of abrasive particles in their cylindrical section is mainly affected by viscous resistance and additional mass force.
Because the force of the ultra-high pressure premixed abrasive particles in the nozzle during accelerationis not clear, we adopt the method of first dividing and then combining external forces andthen establish nonlinear equations with the unfixed point iterative method. We carry out the real-time integration with the MATLAB to build mathematical models to solve the nonlinearequations. We combine theoretical analysis with ANSYS simulation results. The simulation results on the solid-liquid two-phase flow in the nozzle indicate that theoretical analysis and established mathematical models can accurately describe the force of the abrasive particles. The acceleration process of abrasive particles when the nozzle contracts is mainly affected by viscous resistance, additional mass force and pressure strength. Theacceleration process of abrasive particles in their cylindrical section is mainly affected by viscous resistance and additional mass force.







2020, 39(8): 1230-1236.
doi: 10.13433/j.cnki.1003-8728.20190213
Abstract:
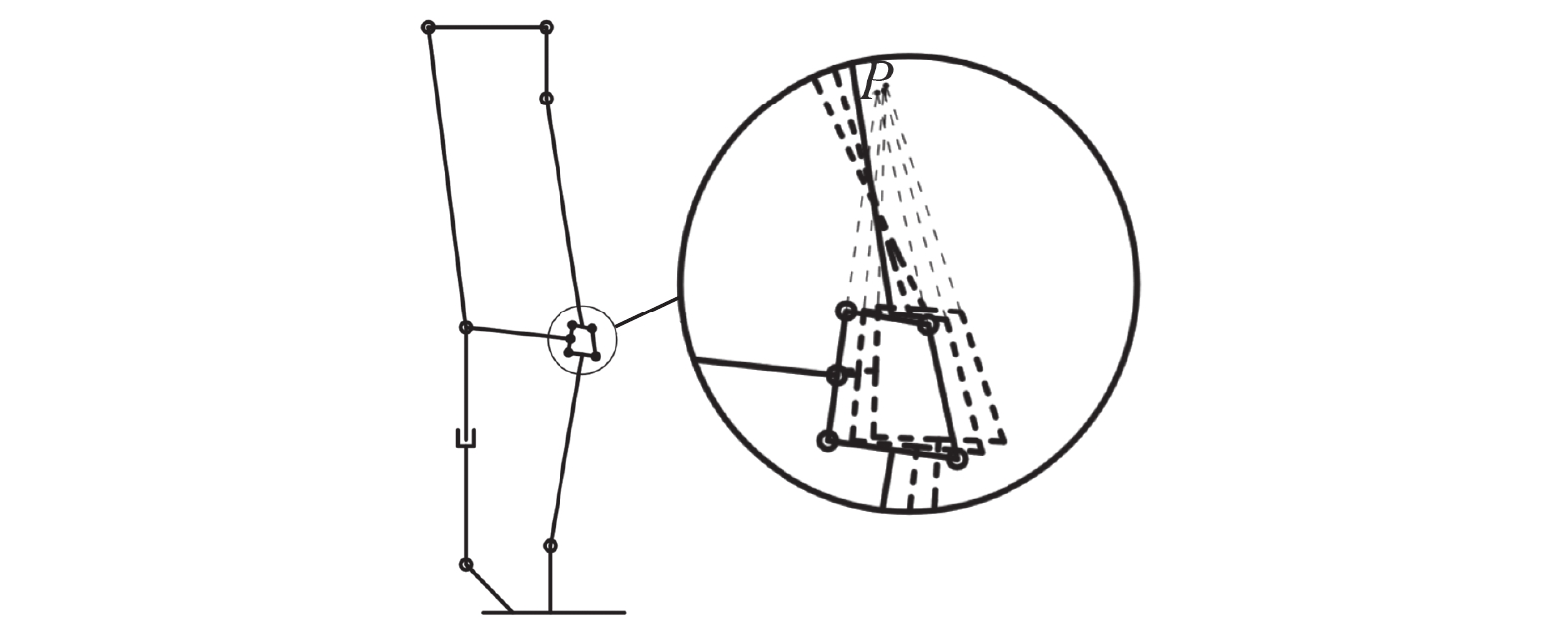
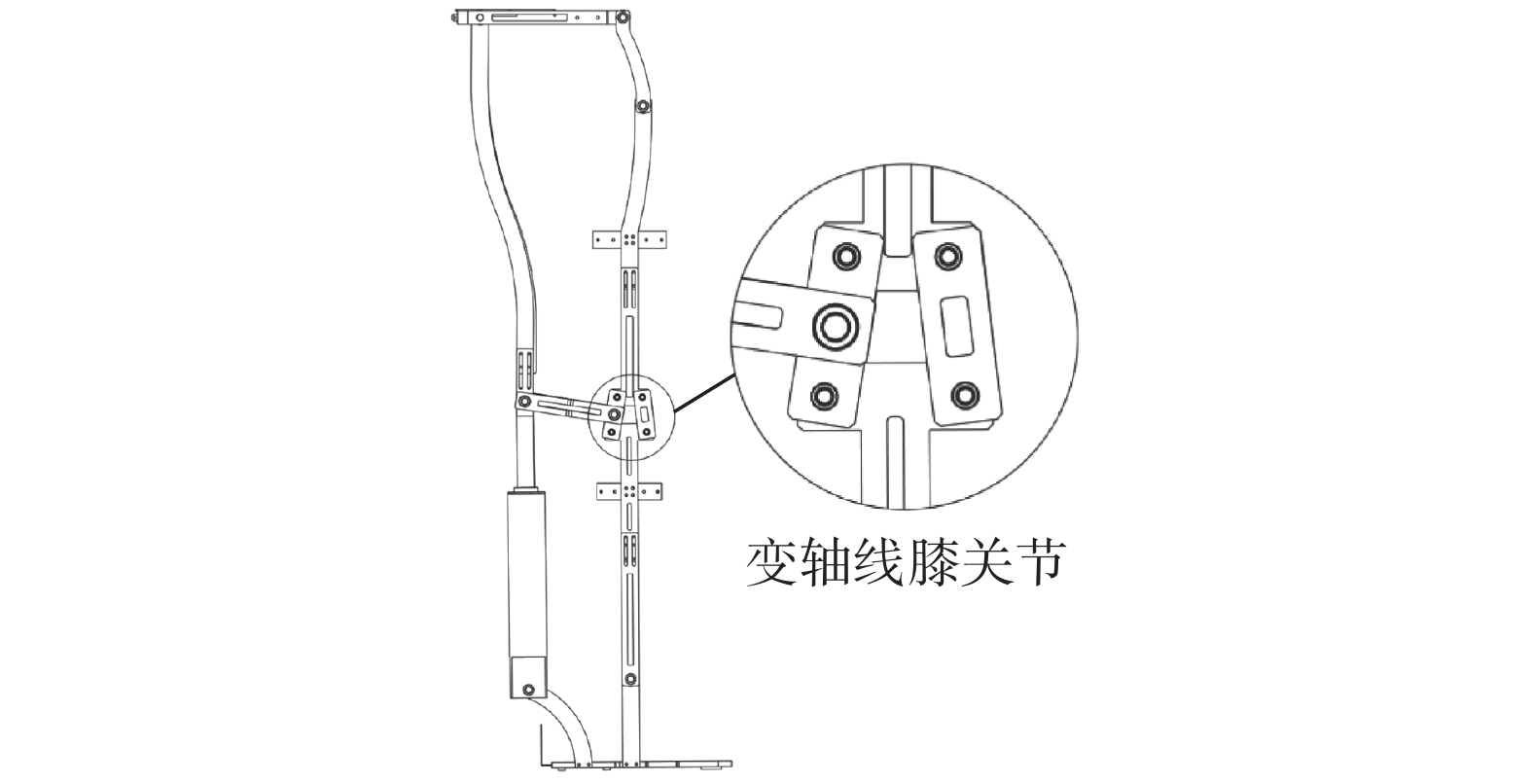
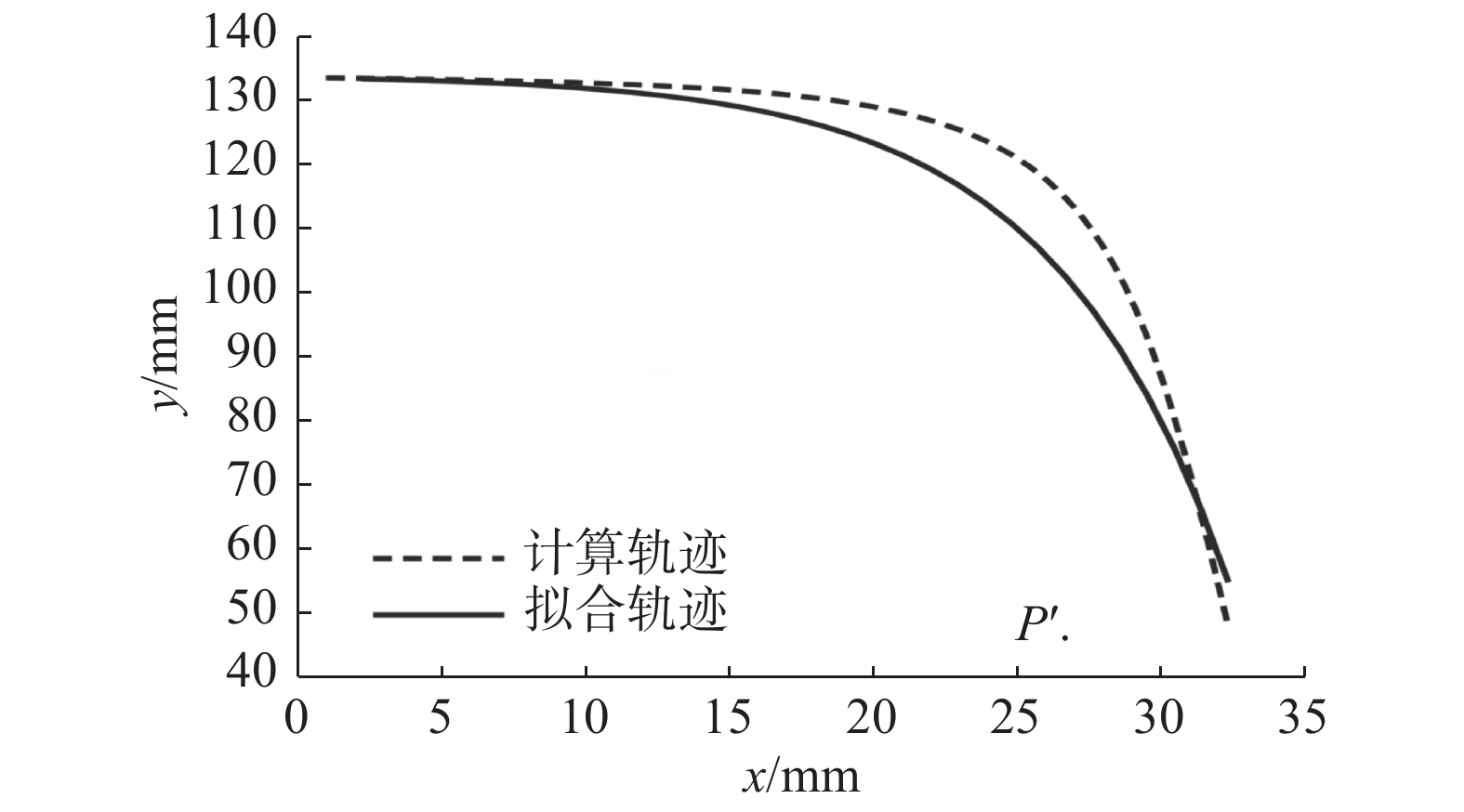
Aiming at the problem that variability of the human knee joint axis and the fixed-axis knee joint mechanism must make the exoskeleton and the human leg have a poor coordination. Based on an unpowered lower limb exoskeleton with a coupled double-branched chain, a variable-axis knee joint mechanism was adopted. Firstly, according to the characteristics of the human knee joint ′J′ type instantaneous trajectory, the appropriate variable axis knee joint mechanism was determined, and the overall model of the exoskeleton with the variable-axis knee joint was established. Secondly, the parameters of the variable-axis knee joint conforming to the instantaneous trajectory of the human knee joint were calculated by genetic algorithm. Finally, the MATLAB calculation verified that the instantaneous trajectory of the variable-axis knee joint conforms to the instantaneous trajectory of the human knee joint. The results show that the instantaneous trajectory of the variable knee joint is more suitable for the instantaneous trajectory of the human knee joint, and the exoskeleton gait with the variable axis knee joint mechanism is more consistent with the human gait.
Aiming at the problem that variability of the human knee joint axis and the fixed-axis knee joint mechanism must make the exoskeleton and the human leg have a poor coordination. Based on an unpowered lower limb exoskeleton with a coupled double-branched chain, a variable-axis knee joint mechanism was adopted. Firstly, according to the characteristics of the human knee joint ′J′ type instantaneous trajectory, the appropriate variable axis knee joint mechanism was determined, and the overall model of the exoskeleton with the variable-axis knee joint was established. Secondly, the parameters of the variable-axis knee joint conforming to the instantaneous trajectory of the human knee joint were calculated by genetic algorithm. Finally, the MATLAB calculation verified that the instantaneous trajectory of the variable-axis knee joint conforms to the instantaneous trajectory of the human knee joint. The results show that the instantaneous trajectory of the variable knee joint is more suitable for the instantaneous trajectory of the human knee joint, and the exoskeleton gait with the variable axis knee joint mechanism is more consistent with the human gait.






2020, 39(8): 1237-1241.
doi: 10.13433/j.cnki.1003-8728.20190252
Abstract:
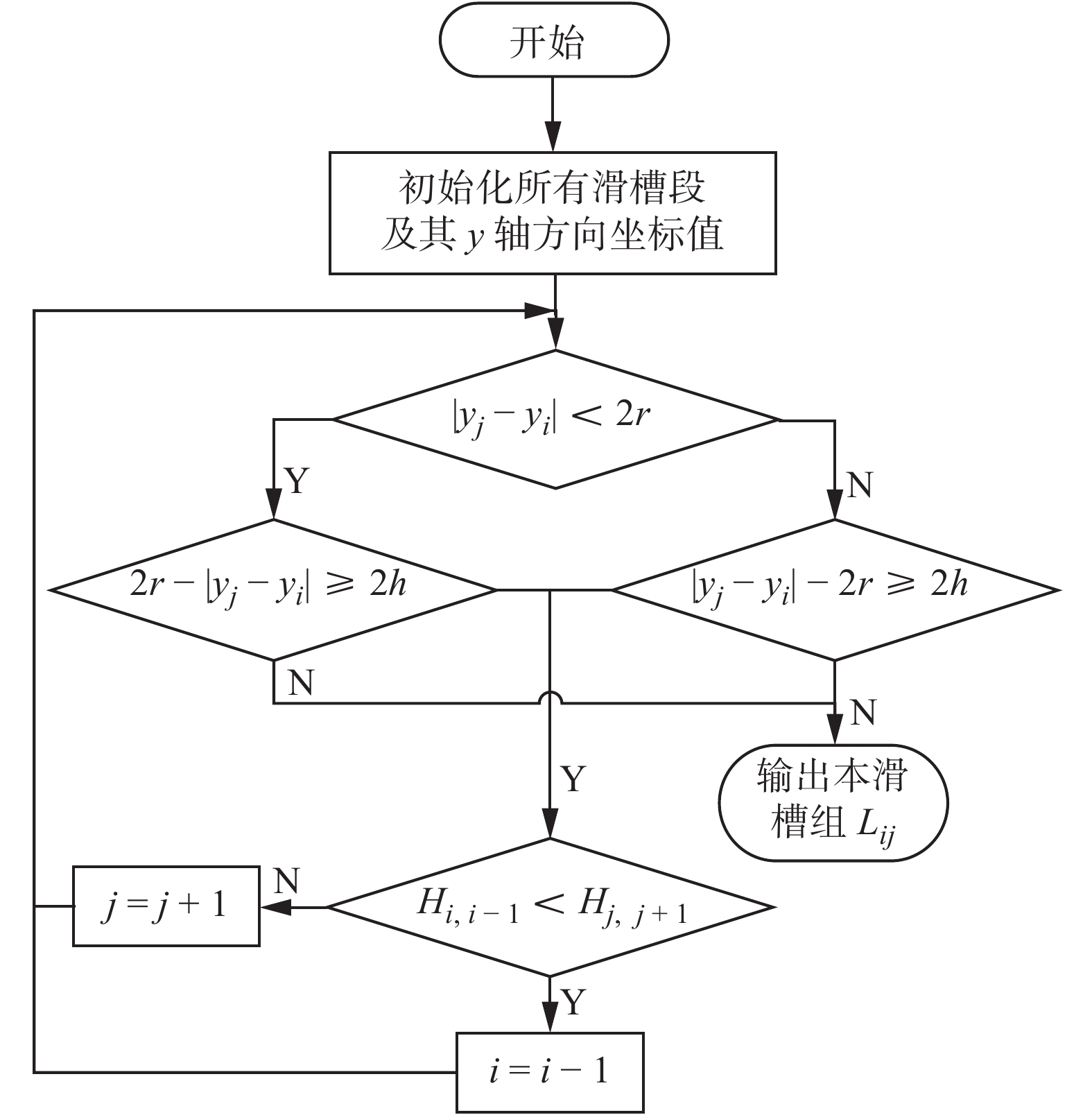
In order to further improve the measuring efficiency and accuracy of the clamping error of the underframe of the urban rail vehicle body by using the current CNC machine tools, the high precision RMP60 machine tool probe is developed with Renishaw Company in England in order to minimize the number of compensation points of machine tool probe, and the underframe coverage measurement method of urban rail vehicle body is put forward based on the grouping programming method and dynamic programming method respectively, and the steps of coverage measurement method are given, and the full coverage of chute points on the underframe is realized. The simulation results show that under the same conditions, when the dynamic programming method is used to cover the chute points, the number of compensation points obtained by using the machine tool probe is 12.9% less than that by using the group programming method, and the overlap rate is reduced by 4.47%. Therefore, the present method can effectively improve the measurement efficiency and accuracy of the machine tool to the bottom frame chute of the urban rail vehicle.
In order to further improve the measuring efficiency and accuracy of the clamping error of the underframe of the urban rail vehicle body by using the current CNC machine tools, the high precision RMP60 machine tool probe is developed with Renishaw Company in England in order to minimize the number of compensation points of machine tool probe, and the underframe coverage measurement method of urban rail vehicle body is put forward based on the grouping programming method and dynamic programming method respectively, and the steps of coverage measurement method are given, and the full coverage of chute points on the underframe is realized. The simulation results show that under the same conditions, when the dynamic programming method is used to cover the chute points, the number of compensation points obtained by using the machine tool probe is 12.9% less than that by using the group programming method, and the overlap rate is reduced by 4.47%. Therefore, the present method can effectively improve the measurement efficiency and accuracy of the machine tool to the bottom frame chute of the urban rail vehicle.






2020, 39(8): 1242-1247.
doi: 10.13433/j.cnki.1003-8728.20190207
Abstract:
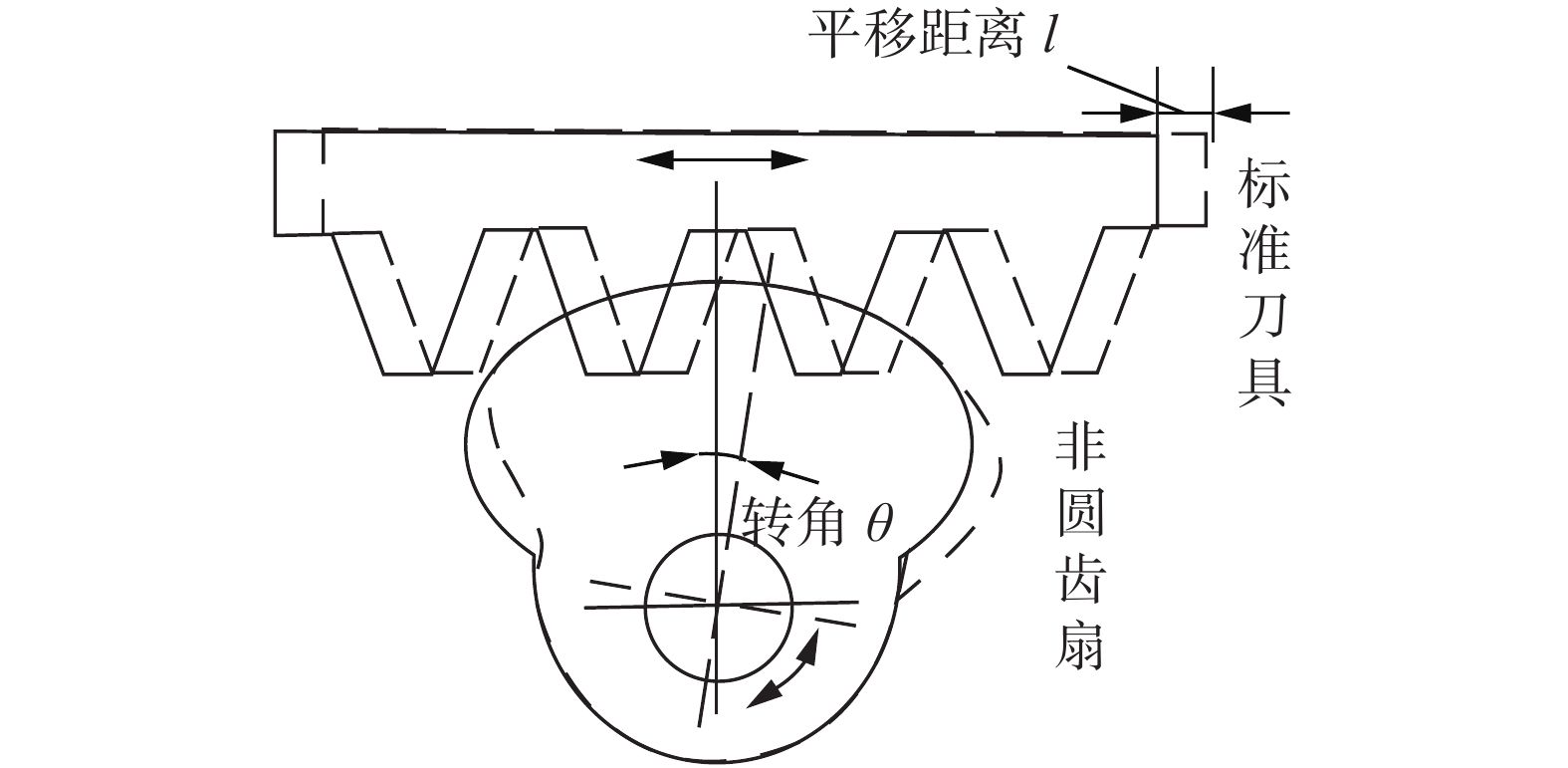
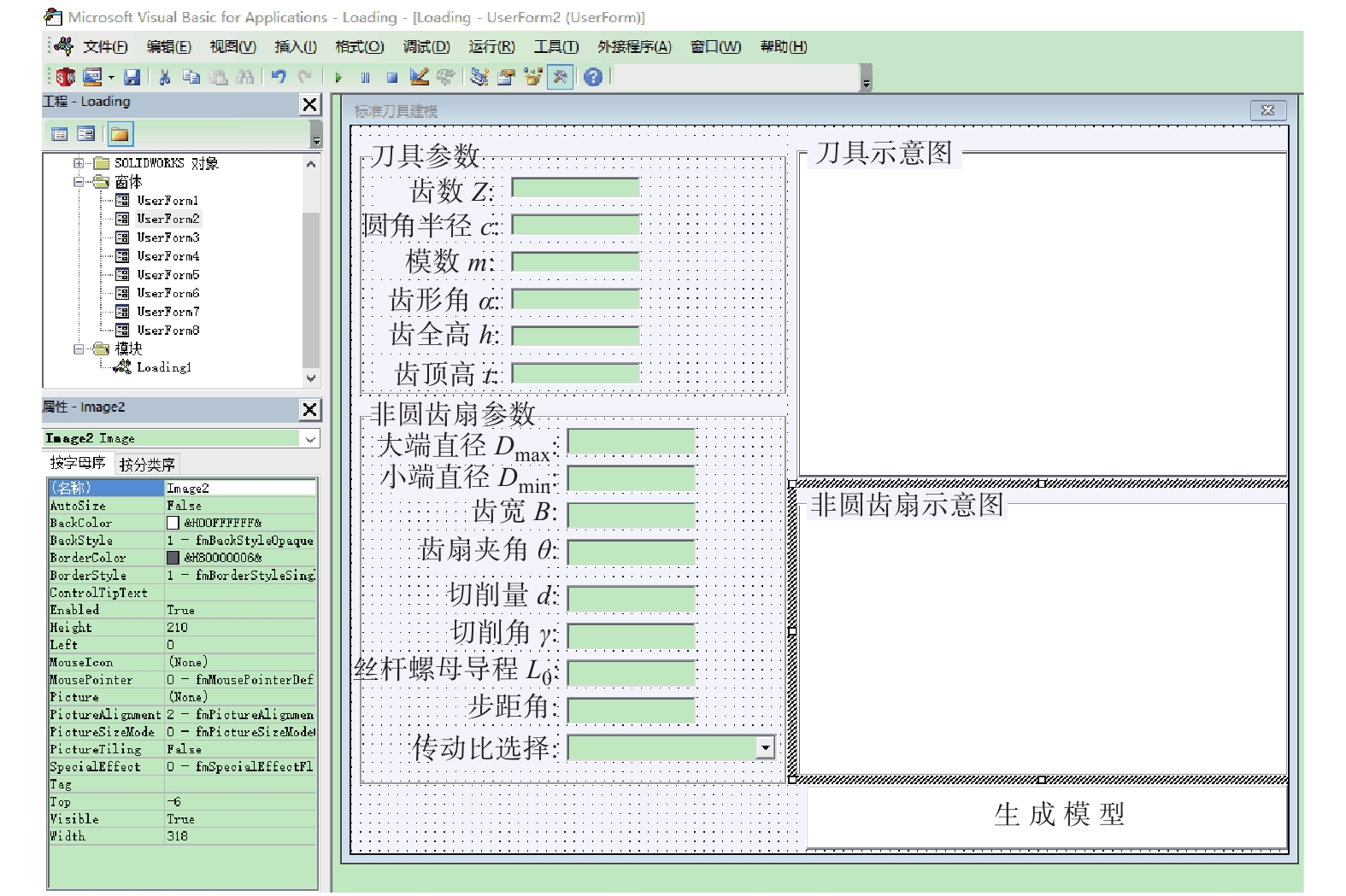
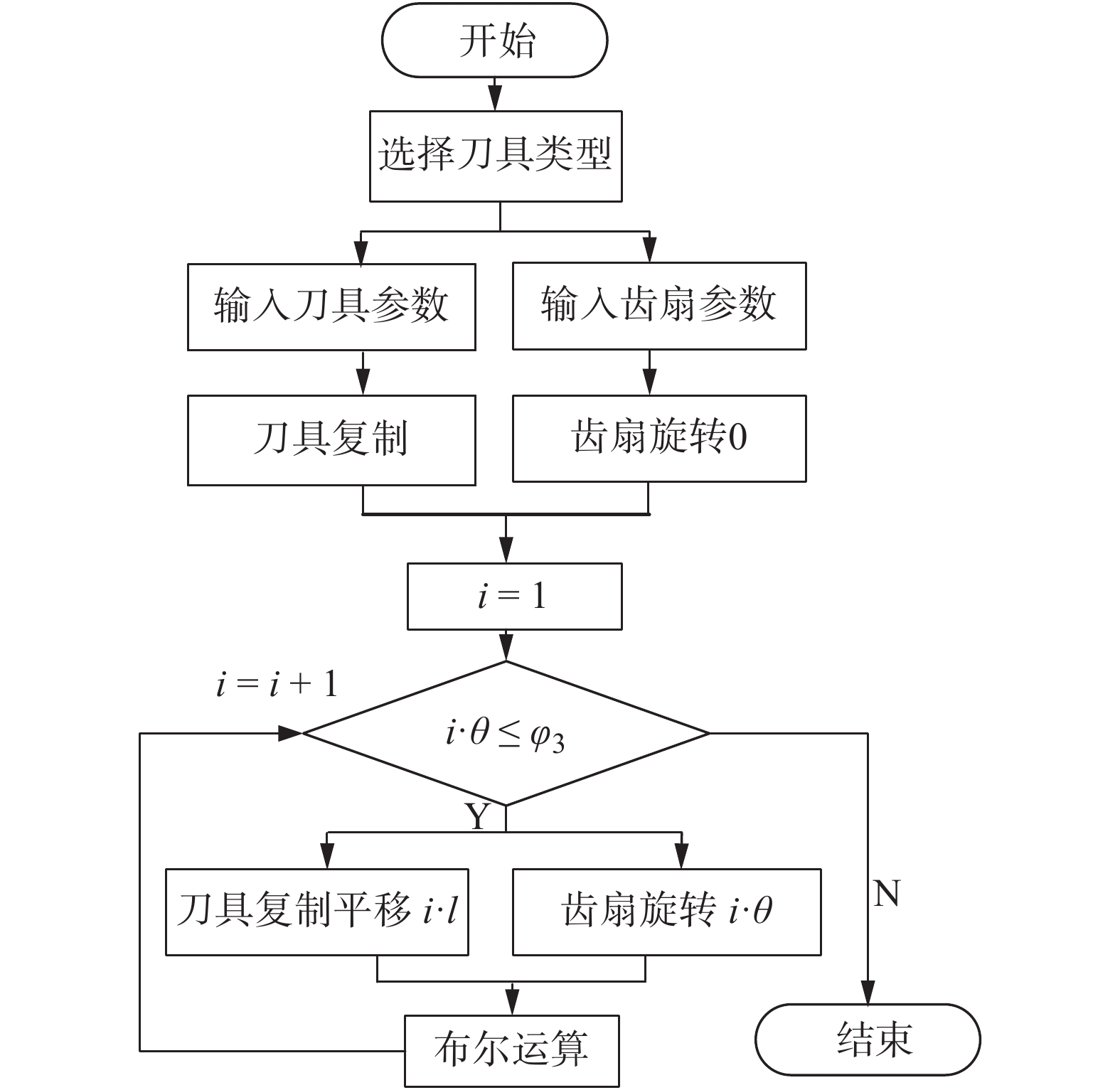
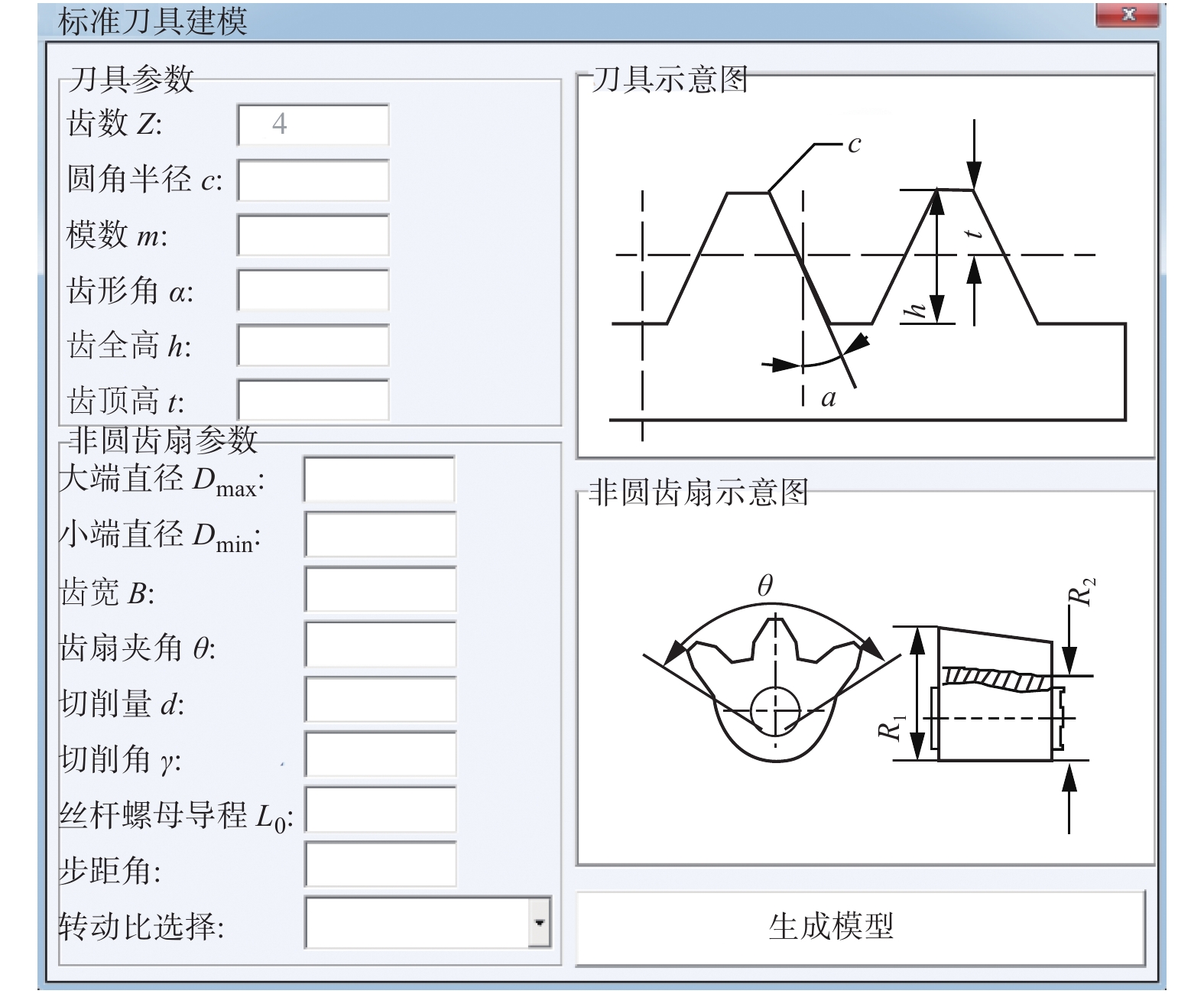
A method based on SolidWorks secondary development is proposed to realize three-dimensional parametric modeling of non-circular gear sector. Using the processing principle of the forming method, the program code is programmed in SolidWorks/VBA to parametrically model the machining tool and the gear, and the machining process of the gear sector is simulated according to the gear ratio curve to generate a three-dimensional model for the non-circular gear sector. The three-dimensional model for the gear sector and the rack is assembled and subjected to dynamic interference detection, and Klingenberg Fiber Gear Testing Center for inspection and comparison is used to verify the correctness of the model. The results show that the present three-dimensional model for non-circular gear sector is feasible, which greatly facilitates the product design requirement.
A method based on SolidWorks secondary development is proposed to realize three-dimensional parametric modeling of non-circular gear sector. Using the processing principle of the forming method, the program code is programmed in SolidWorks/VBA to parametrically model the machining tool and the gear, and the machining process of the gear sector is simulated according to the gear ratio curve to generate a three-dimensional model for the non-circular gear sector. The three-dimensional model for the gear sector and the rack is assembled and subjected to dynamic interference detection, and Klingenberg Fiber Gear Testing Center for inspection and comparison is used to verify the correctness of the model. The results show that the present three-dimensional model for non-circular gear sector is feasible, which greatly facilitates the product design requirement.







2020, 39(8): 1256-1262.
doi: 10.13433/j.cnki.1003-8728.20190251
Abstract:
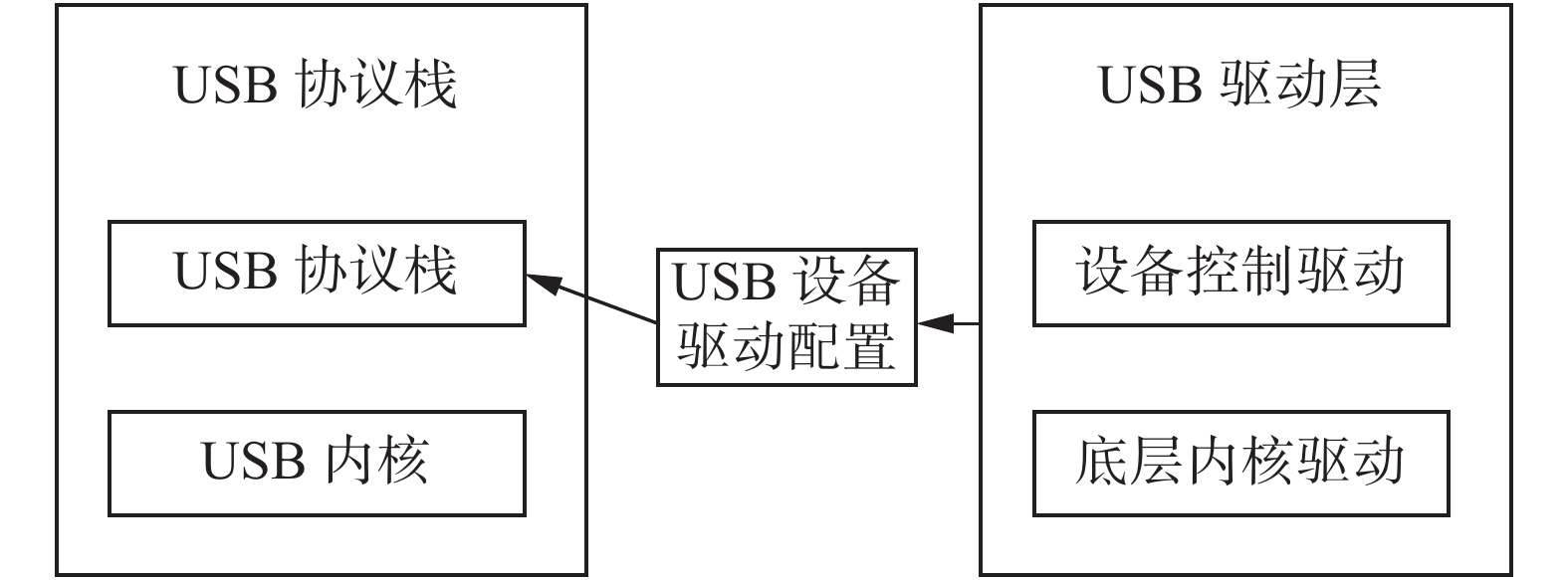
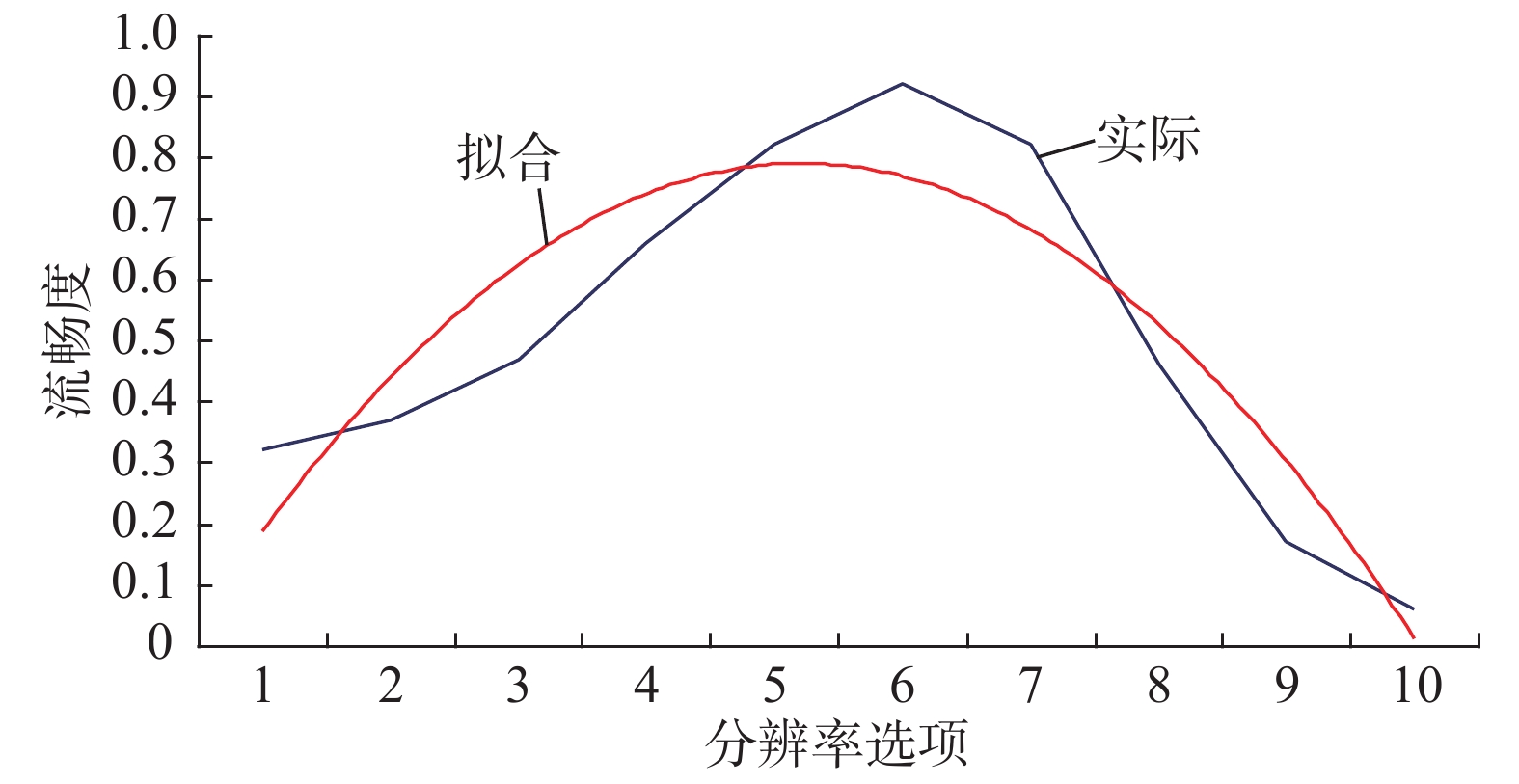
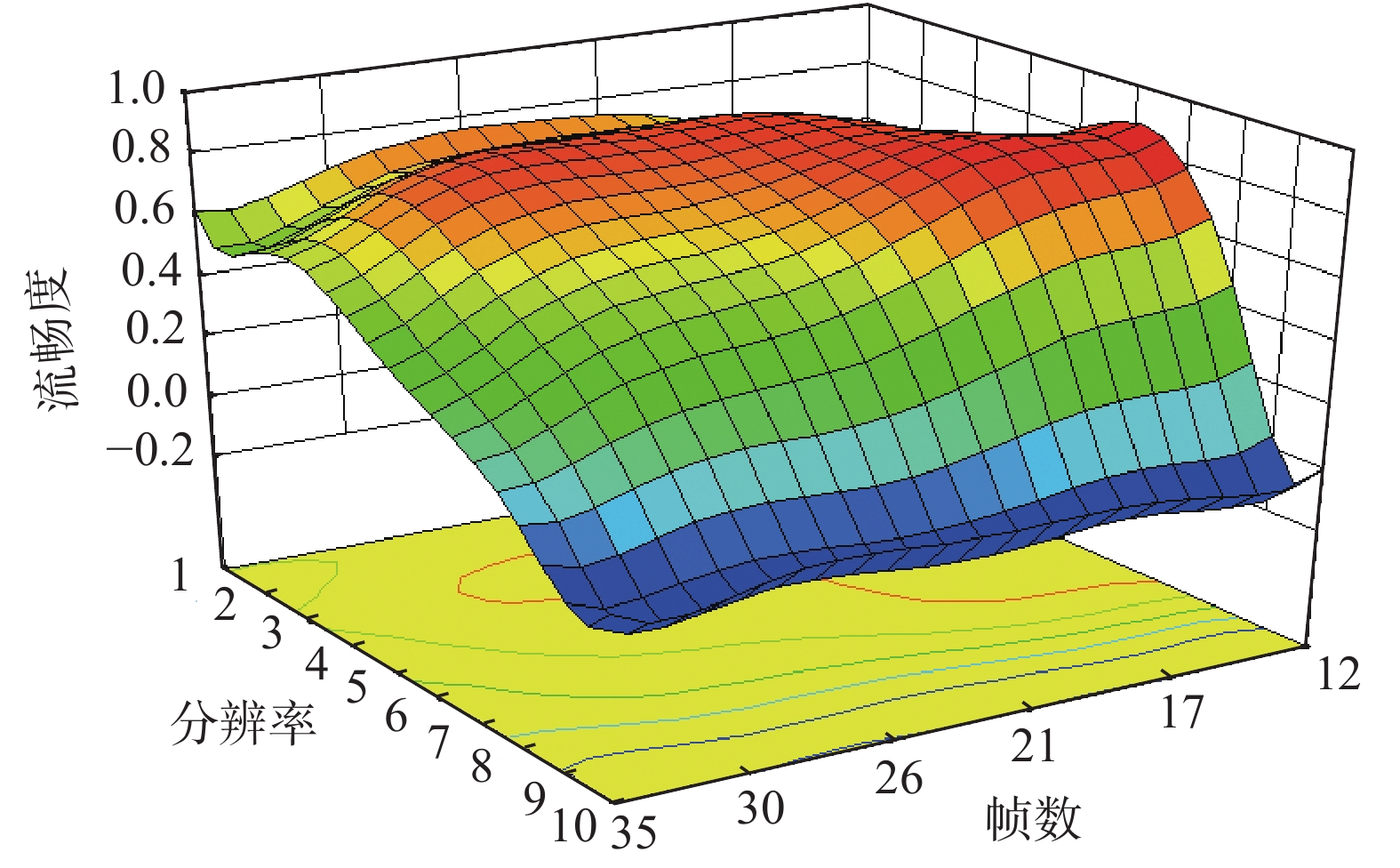
To explore the feasibility of practical application of NCM technology, solve the insufficient transmission bandwidth of LCD(liquid crystal instrument)and high cost of Ethernet in vehicle, the working environment of NCM is analyzed. Through the design of NCM USB compatible interface and network decoder, the NCM transmission process is optimized, and the on-board NCM transmission system is designed. Data processing found that the optimal working frame of this system is 20 frames under a single condition, and the limit transmission rate reaches 22.5 M/s, which can be used for high-bandwidth data transmission of automobiles. To determine the optimal working interval of NCM transmission, the comprehensive influence of the multiple factors on the NCM transmission is analyzed, and the model to evaluate the system is introduced. The results show that NCM technology can be used for high bandwidth data transmission of vehicle in certain conditions. When the resolution is 600×240 and the working frame is 18, the fluency is 0.85, and the transmission effect of the video stream is the best. The present study not only provides the NCM transmission scheme with low cost and high bandwidth, but also provides the evaluation model for NCM transmission working environment, which provides theoretical fundamental for applying the NCM technology.
To explore the feasibility of practical application of NCM technology, solve the insufficient transmission bandwidth of LCD(liquid crystal instrument)and high cost of Ethernet in vehicle, the working environment of NCM is analyzed. Through the design of NCM USB compatible interface and network decoder, the NCM transmission process is optimized, and the on-board NCM transmission system is designed. Data processing found that the optimal working frame of this system is 20 frames under a single condition, and the limit transmission rate reaches 22.5 M/s, which can be used for high-bandwidth data transmission of automobiles. To determine the optimal working interval of NCM transmission, the comprehensive influence of the multiple factors on the NCM transmission is analyzed, and the model to evaluate the system is introduced. The results show that NCM technology can be used for high bandwidth data transmission of vehicle in certain conditions. When the resolution is 600×240 and the working frame is 18, the fluency is 0.85, and the transmission effect of the video stream is the best. The present study not only provides the NCM transmission scheme with low cost and high bandwidth, but also provides the evaluation model for NCM transmission working environment, which provides theoretical fundamental for applying the NCM technology.






2020, 39(8): 1263-1270.
doi: 10.13433/j.cnki.1003-8728.20190267
Abstract:
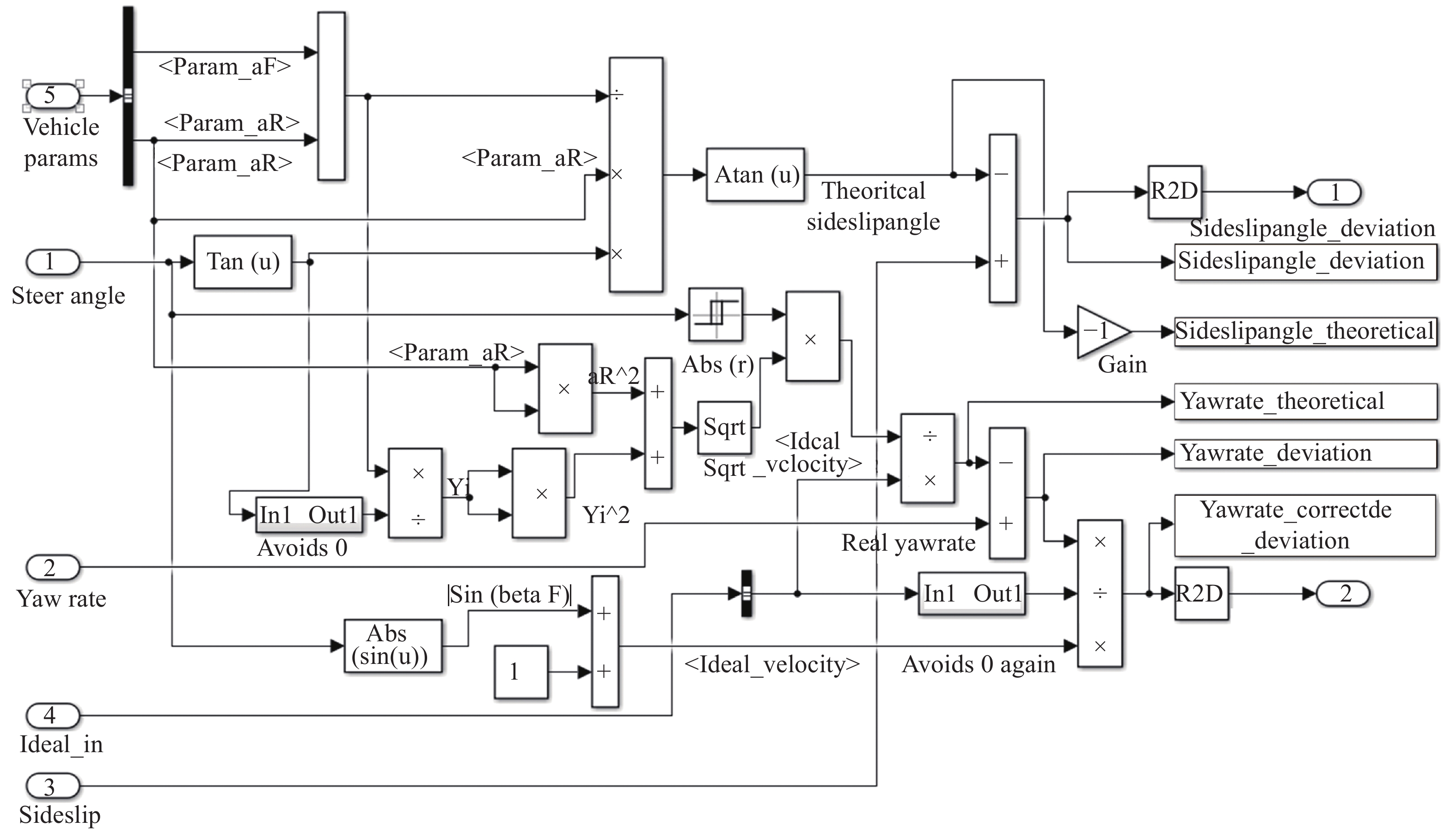
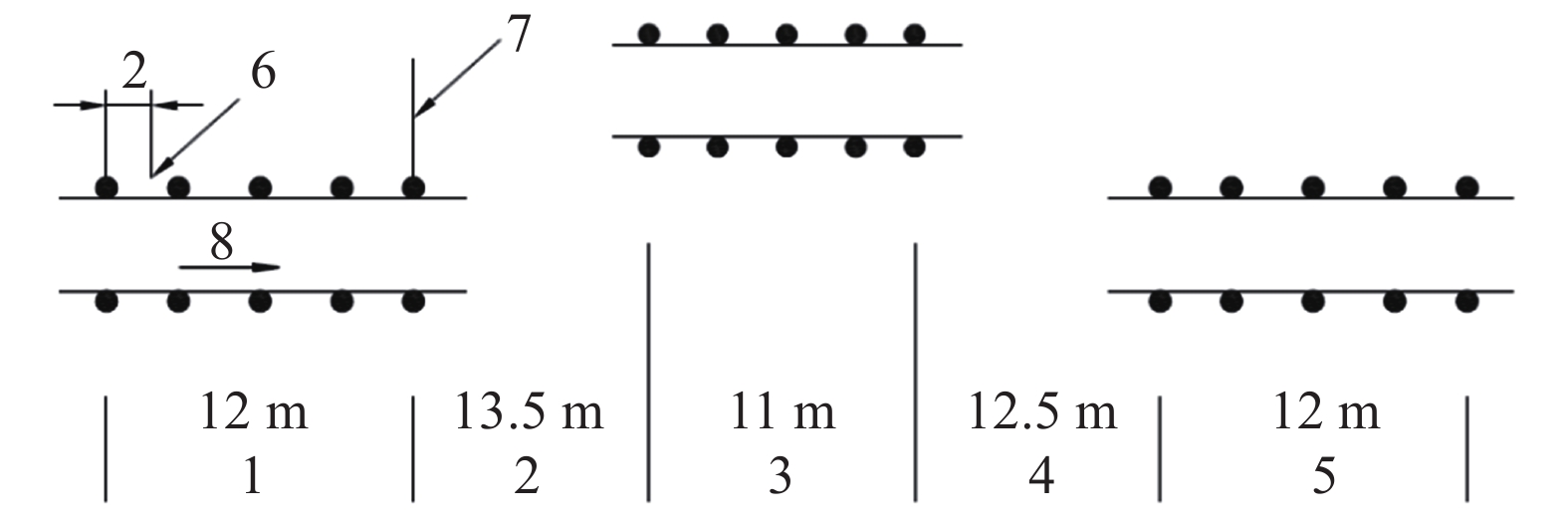
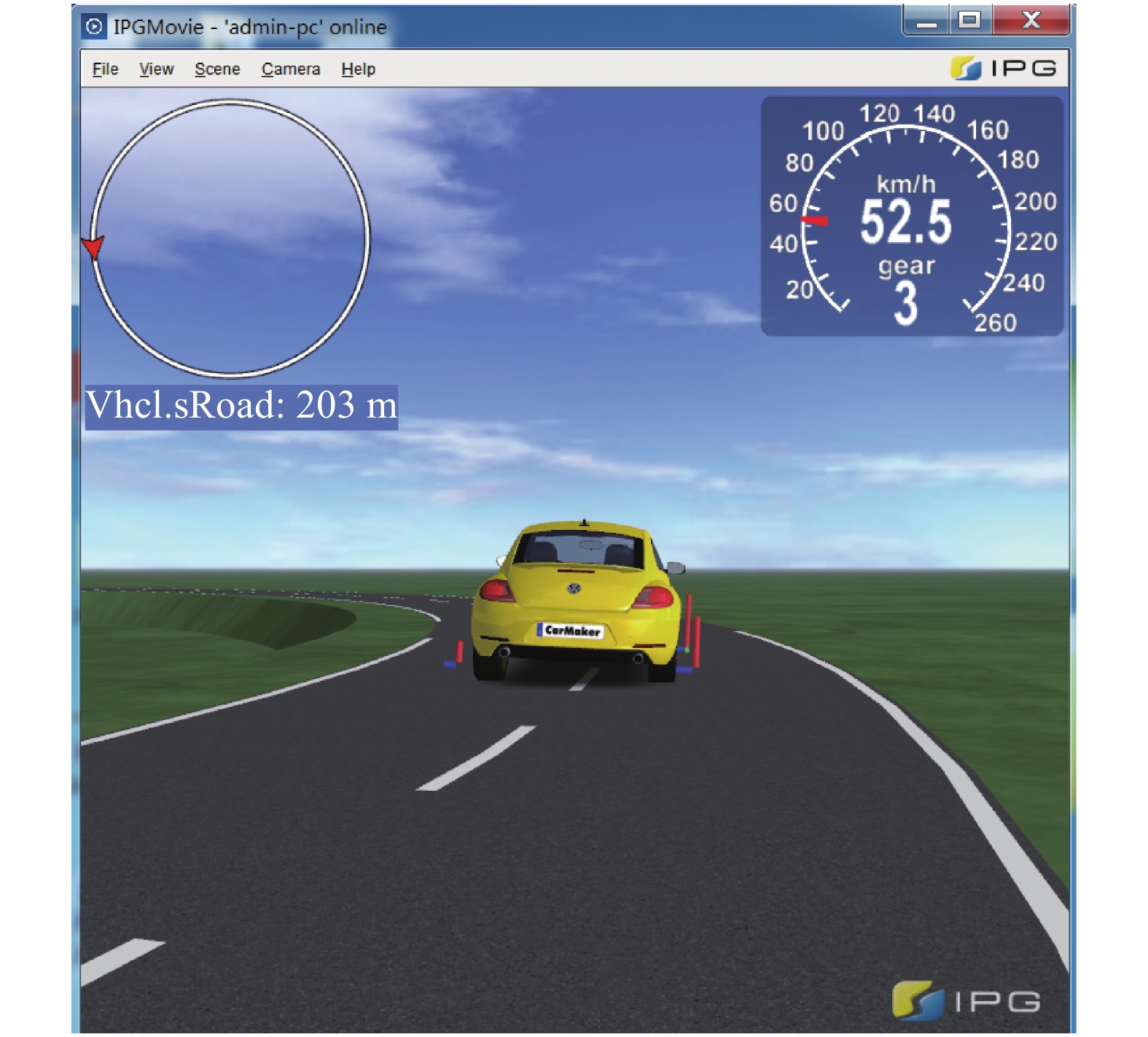
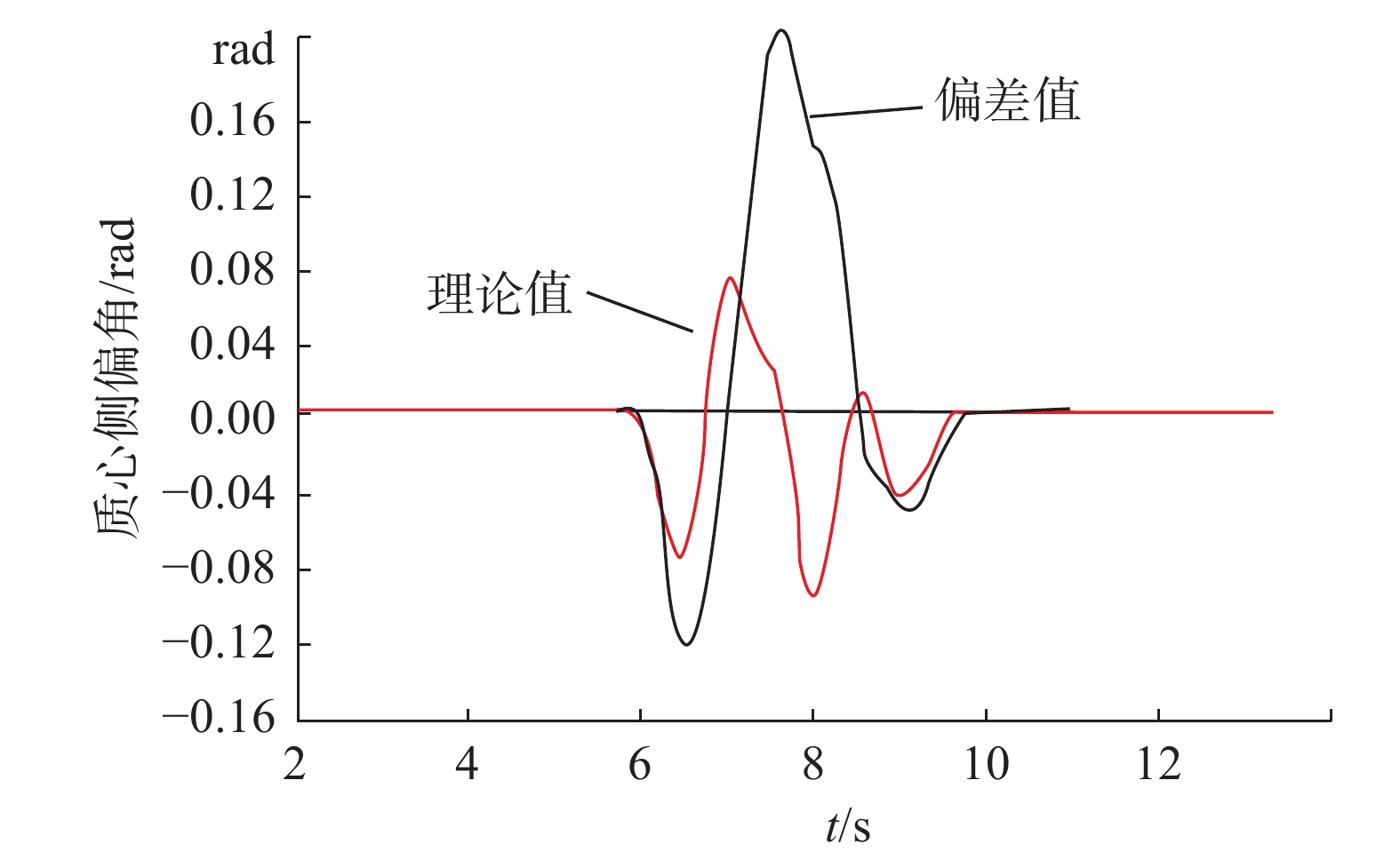
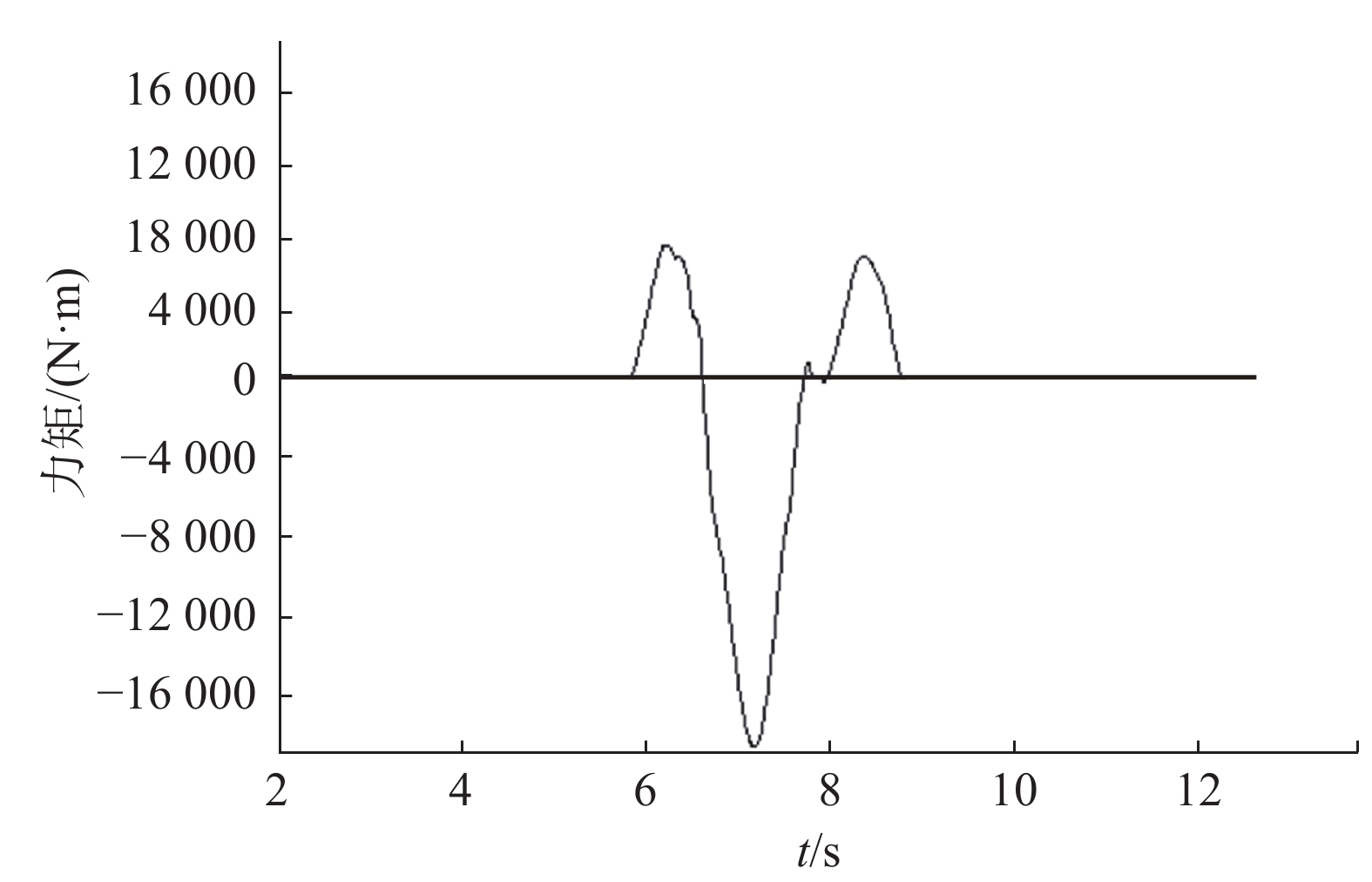
In order to improve the control accuracy of vehicle electronic stability program, an ESP control system algorithm with yaw angular velocity and sideslip angle of center of mass as inputs is proposed through the idea of layered modularization, in which the stable braking moment is as final output to improve vehicle handling stability. In order to ensure the accuracy of the control system, CarMaker and Simulink were used to establish a virtual joint simulation environment, which was validated under the condition of ISO3888-2 (2002). The results show that the effectiveness of ESP system is validated by experiments. When the deviation between yaw rate and sideslip angle exceeds the prescribed range, the ESP control system can implement braking intervention accurately, which ensures that the vehicle can accurately track the driver's desired route..
In order to improve the control accuracy of vehicle electronic stability program, an ESP control system algorithm with yaw angular velocity and sideslip angle of center of mass as inputs is proposed through the idea of layered modularization, in which the stable braking moment is as final output to improve vehicle handling stability. In order to ensure the accuracy of the control system, CarMaker and Simulink were used to establish a virtual joint simulation environment, which was validated under the condition of ISO3888-2 (2002). The results show that the effectiveness of ESP system is validated by experiments. When the deviation between yaw rate and sideslip angle exceeds the prescribed range, the ESP control system can implement braking intervention accurately, which ensures that the vehicle can accurately track the driver's desired route..







2020, 39(8): 1271-1276.
doi: 10.13433/j.cnki.1003-8728.20190229
Abstract:
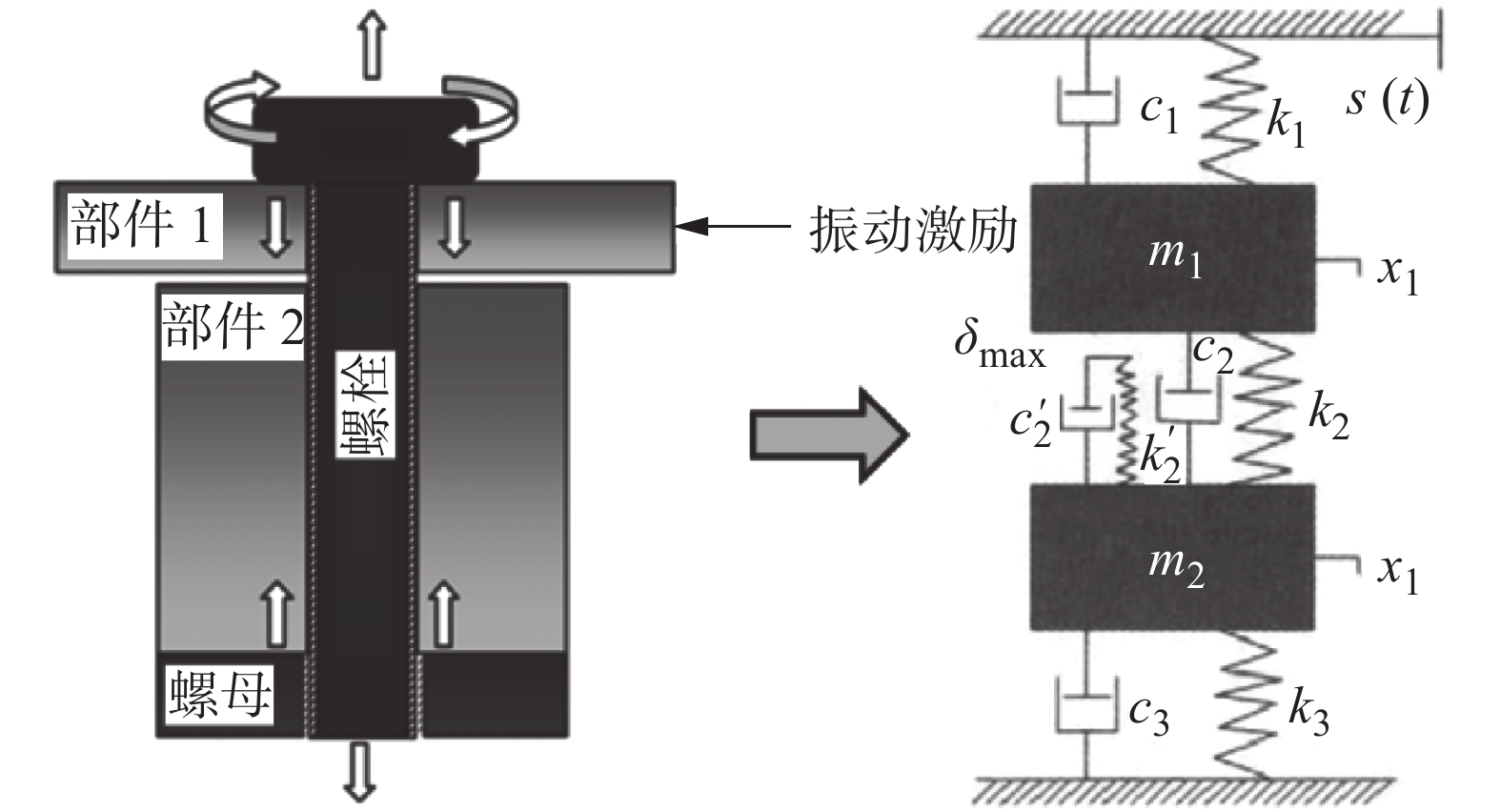
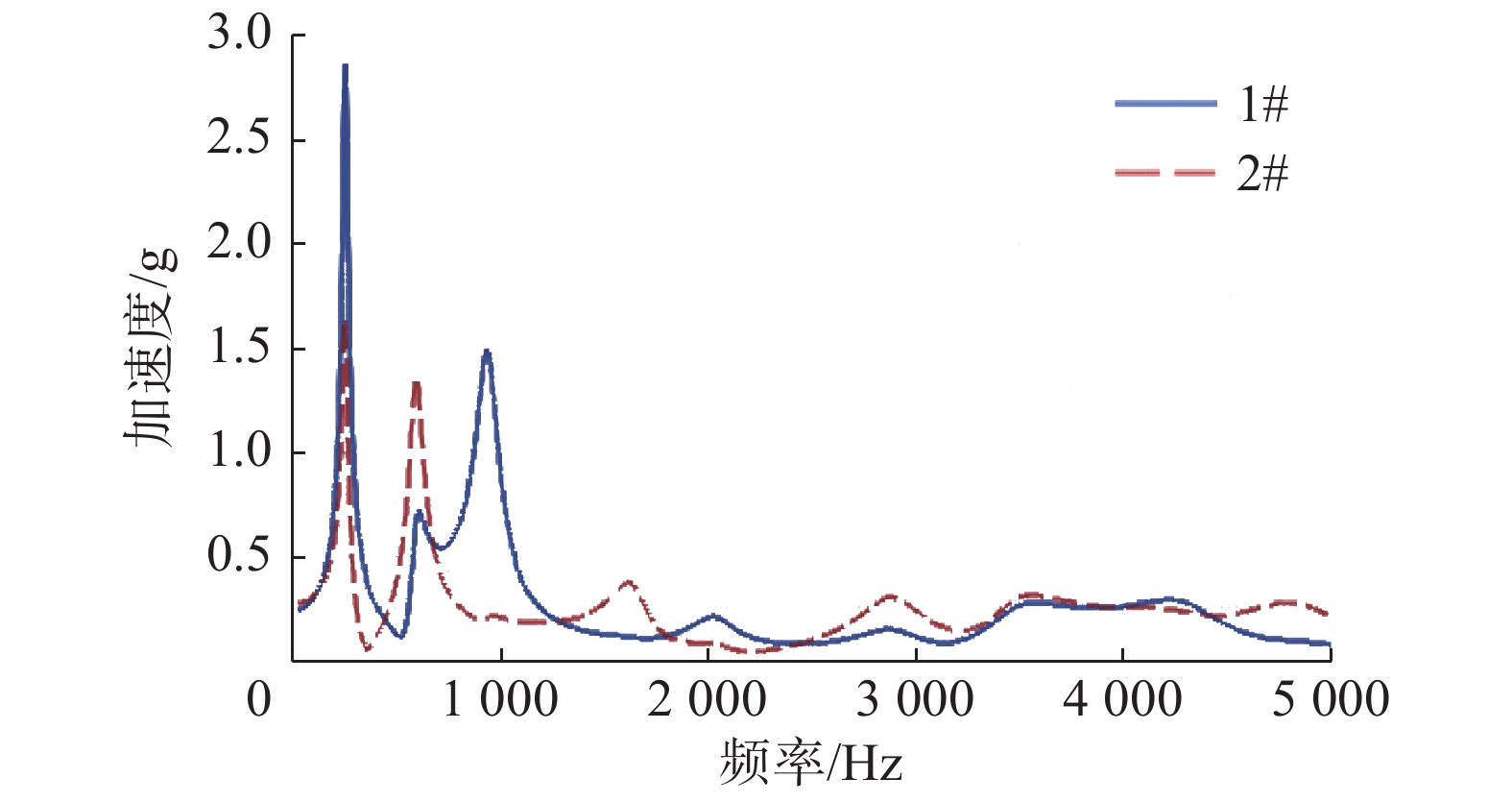
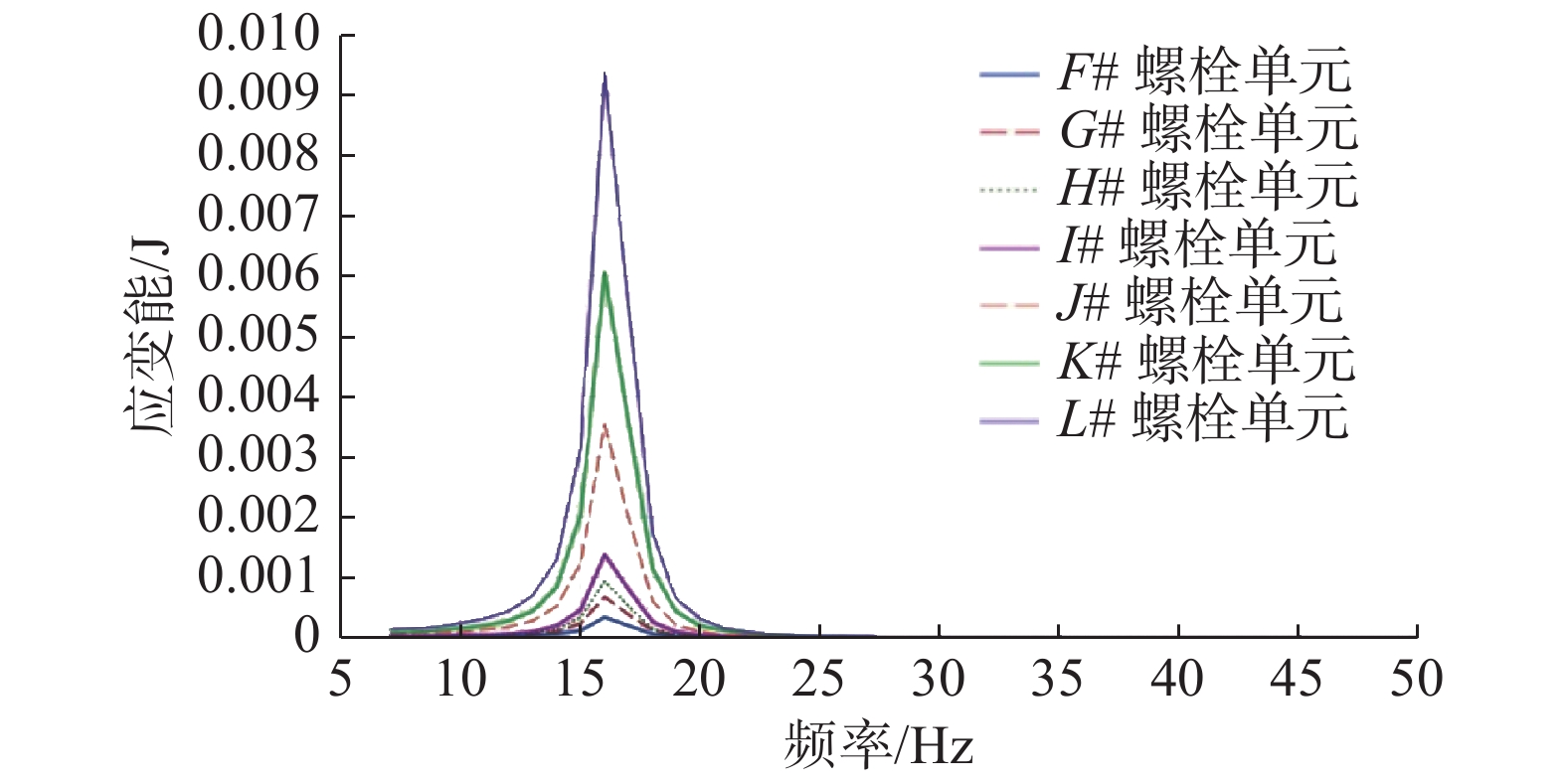
In order to improve the structural connection reliability and integrity under vibration environment of the electric vehicle battery case, a complete evaluation and control process of the bolt vibration relaxation was established. Firstly, by combining the test and simulation, a high-precision calculation model for bolt dynamic response simulation analysis is established. Then, taking the result of harmonic distortion evaluation as reference, to take strain energy response RMS value as the bolt vibration relaxation evaluation parameter is proposed. Finally, according to the requirements of national standards, the vibration relaxation performance of a battery case bolt was evaluated, and the bolt connection reliability was improved by optimizing the bolt spacing and pre-tightening force. The above-mentioned results can be used as an effective simulation method for predicting and evaluating the safety performance of battery case in the early stage of development.
In order to improve the structural connection reliability and integrity under vibration environment of the electric vehicle battery case, a complete evaluation and control process of the bolt vibration relaxation was established. Firstly, by combining the test and simulation, a high-precision calculation model for bolt dynamic response simulation analysis is established. Then, taking the result of harmonic distortion evaluation as reference, to take strain energy response RMS value as the bolt vibration relaxation evaluation parameter is proposed. Finally, according to the requirements of national standards, the vibration relaxation performance of a battery case bolt was evaluated, and the bolt connection reliability was improved by optimizing the bolt spacing and pre-tightening force. The above-mentioned results can be used as an effective simulation method for predicting and evaluating the safety performance of battery case in the early stage of development.








2020, 39(8): 1277-1282.
doi: 10.13433/j.cnki.1003-8728.20190263
Abstract:
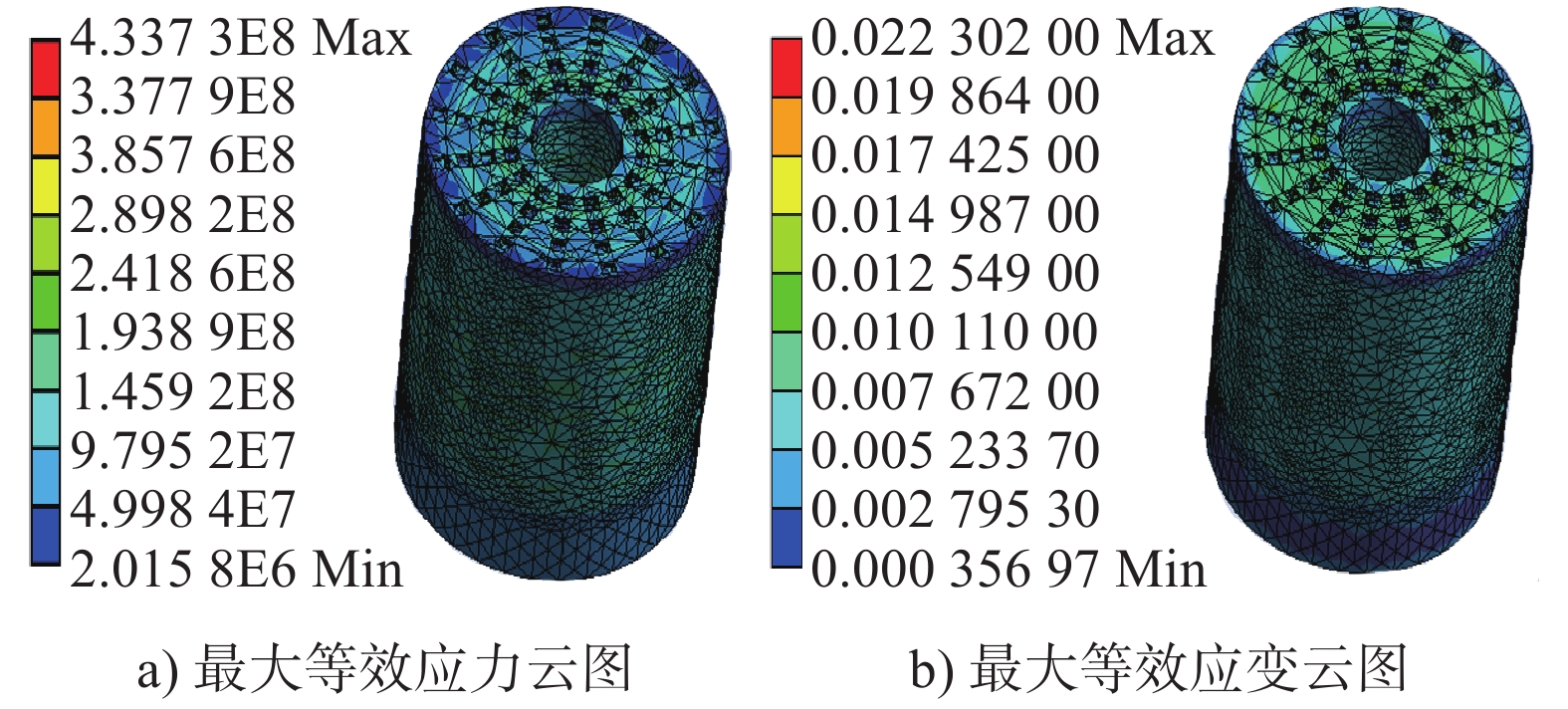
In order to solve a series of problems caused by the mismatch between the elastic modulus of titanium alloy bone implant and the elastic modulus of human bone, the porous structure of the titanium alloy bone implant is used to adapt the mechanical properties of the autogenous bone. According to the different density characteristics of different bone parts, three different micro pore cell structures are designed: open rod cell, open column cell and central ball cell. Bionic bone modeling based on these cells, and 11 kinds of membranes were obtained under different structural sizes. The static simulation of 11 models are carried out by using the software ANSYS workbench to obtain the maximum equivalent stress and the maximum equivalent strain distribution of the bone implant structure obtained by the axial compression load, and the elastic modulus data. The TC4 titanium alloy powder is used to manufacture the experimental samples by SLM technology, and the compression and three-point bending tests were performed. Simulation and experimental results show that the open rod-shaped cell is suitable for bone reconstruction with high elastic model and bending strength. The open cylindrical cell is suitable for bone reconstruction with large elastic modulus range, while the central spherical cell is suitable for bone reconstruction with low elastic modulus and small variation range.
In order to solve a series of problems caused by the mismatch between the elastic modulus of titanium alloy bone implant and the elastic modulus of human bone, the porous structure of the titanium alloy bone implant is used to adapt the mechanical properties of the autogenous bone. According to the different density characteristics of different bone parts, three different micro pore cell structures are designed: open rod cell, open column cell and central ball cell. Bionic bone modeling based on these cells, and 11 kinds of membranes were obtained under different structural sizes. The static simulation of 11 models are carried out by using the software ANSYS workbench to obtain the maximum equivalent stress and the maximum equivalent strain distribution of the bone implant structure obtained by the axial compression load, and the elastic modulus data. The TC4 titanium alloy powder is used to manufacture the experimental samples by SLM technology, and the compression and three-point bending tests were performed. Simulation and experimental results show that the open rod-shaped cell is suitable for bone reconstruction with high elastic model and bending strength. The open cylindrical cell is suitable for bone reconstruction with large elastic modulus range, while the central spherical cell is suitable for bone reconstruction with low elastic modulus and small variation range.








2020, 39(8): 1283-1287.
doi: 10.13433/j.cnki.1003-8728.20190259
Abstract:
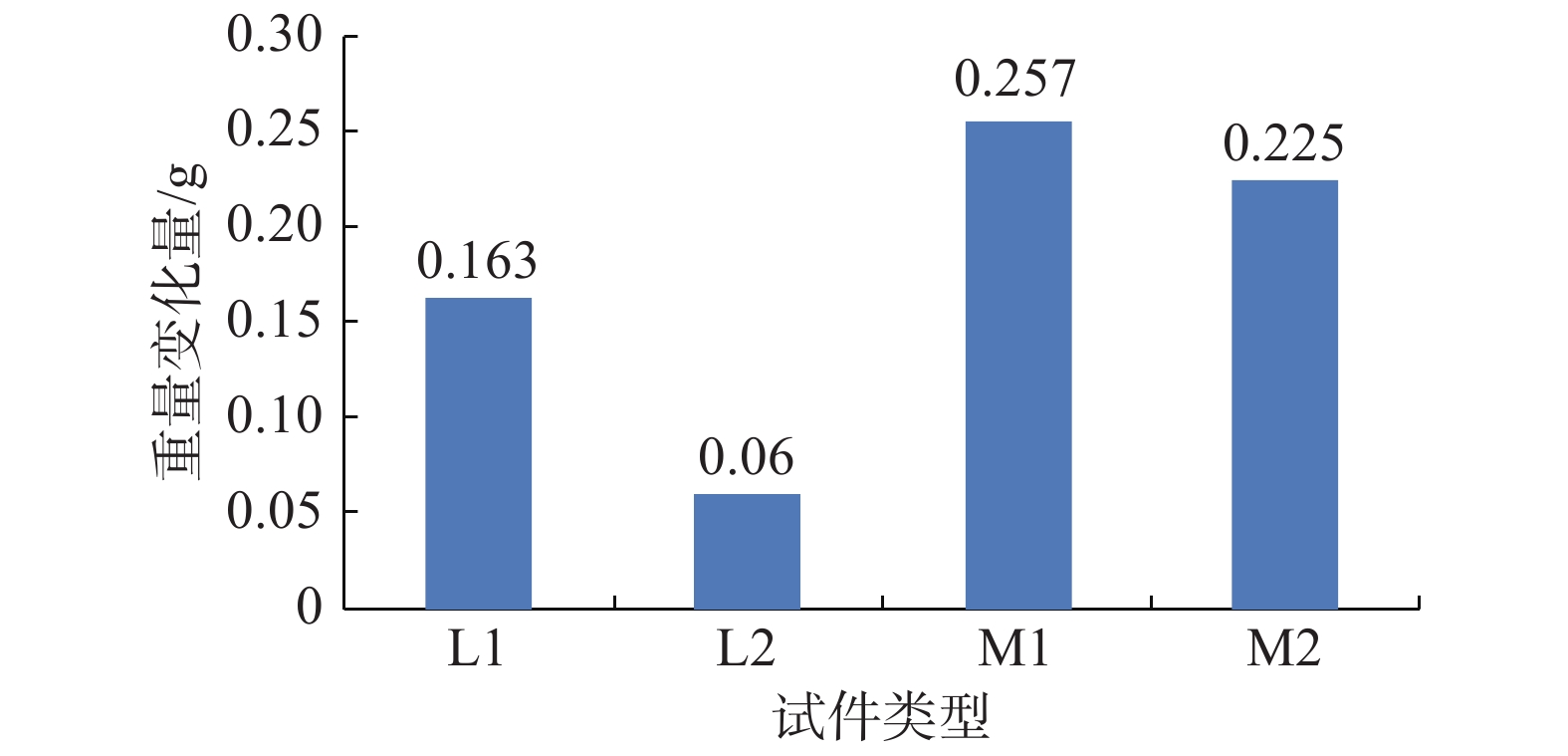
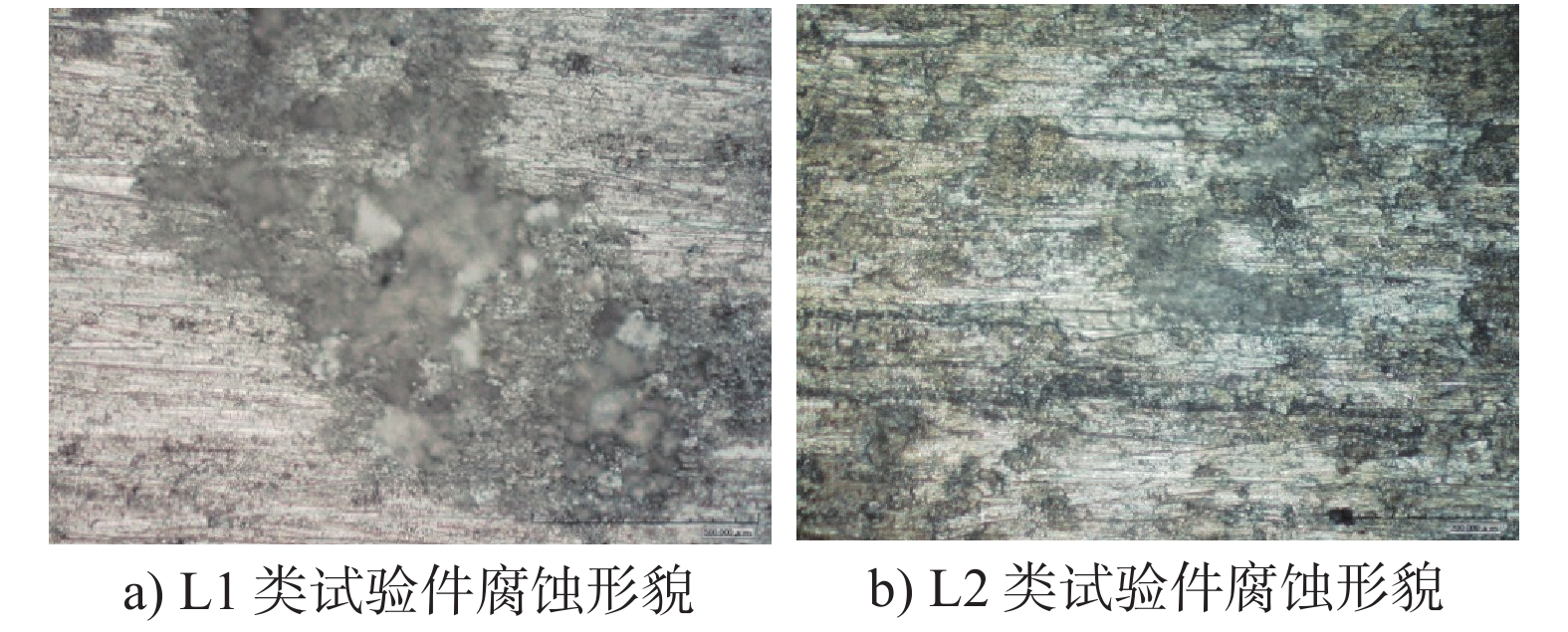
7B04 aluminum alloy riveted structure specimens were exposured in two different marine environments for one year. The corrosion of the specimens was comparatively analyzed, and the effect of the two service environments on the corrosion behavior of 7B04 aluminum alloy was studied. The results show that the corrosion of 7B04 aluminum alloy riveted structure specimens has occurred obviously in the two marine environments, the fatigue performance of specimens has been reduced with varying degree. But coatings can protect the aluminum alloy away from destruction in marine environment. The effect of the two marine environments on the corrosion behavior of 7B04 aluminum alloy also shows obvious difference, the corrosion protection must be done well in service environment.
7B04 aluminum alloy riveted structure specimens were exposured in two different marine environments for one year. The corrosion of the specimens was comparatively analyzed, and the effect of the two service environments on the corrosion behavior of 7B04 aluminum alloy was studied. The results show that the corrosion of 7B04 aluminum alloy riveted structure specimens has occurred obviously in the two marine environments, the fatigue performance of specimens has been reduced with varying degree. But coatings can protect the aluminum alloy away from destruction in marine environment. The effect of the two marine environments on the corrosion behavior of 7B04 aluminum alloy also shows obvious difference, the corrosion protection must be done well in service environment.



2020, 39(8): 1295-1298.
doi: 10.13433/j.cnki.1003-8728.20200025
Abstract:
The graphene flakes obtained by using the chemical redox method were modified with oleic acid and stearic acid. The dispersion stability of graphene as a lubricating oil additive was investigated by spectrophotometry. The microstructure and composition of the graphene dispersion were characterized by using the scanning electron microscopy and energy dispersive spectroscopy. The tribological properties of the graphene dispersion were investigated by using a four-ball friction and wear tester. The microstructure and composition of the friction surface were characterized and analyzed via SEM and EDS. Results show that the graphene modified is evenly dispersed in lubricating oil are processed in a necessary condition, after the modification of graphene dispersion showed good antiwear and friction-reducing, the average friction coefficient was 0.078, reduce about 12%, grinding spot diameter also have declined obviously, and the wear surface is verified by the experiments has graphene grain accumulation phenomenon.
The graphene flakes obtained by using the chemical redox method were modified with oleic acid and stearic acid. The dispersion stability of graphene as a lubricating oil additive was investigated by spectrophotometry. The microstructure and composition of the graphene dispersion were characterized by using the scanning electron microscopy and energy dispersive spectroscopy. The tribological properties of the graphene dispersion were investigated by using a four-ball friction and wear tester. The microstructure and composition of the friction surface were characterized and analyzed via SEM and EDS. Results show that the graphene modified is evenly dispersed in lubricating oil are processed in a necessary condition, after the modification of graphene dispersion showed good antiwear and friction-reducing, the average friction coefficient was 0.078, reduce about 12%, grinding spot diameter also have declined obviously, and the wear surface is verified by the experiments has graphene grain accumulation phenomenon.


2020, 39(8): 1299-1306.
doi: 10.13433/j.cnki.1003-8728.20200160
Abstract:
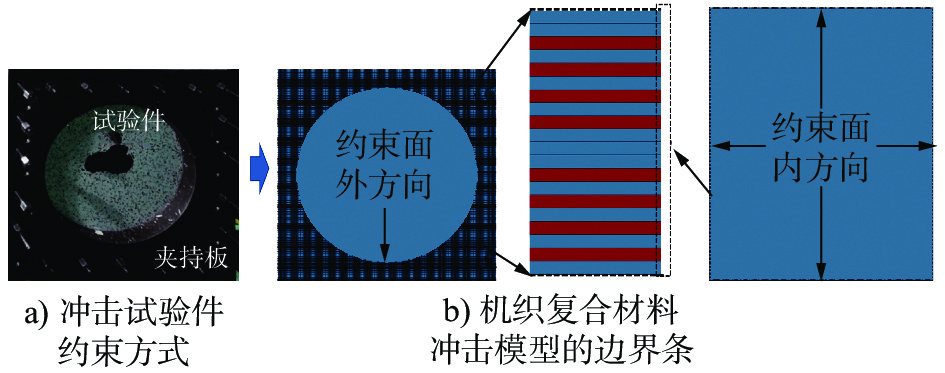
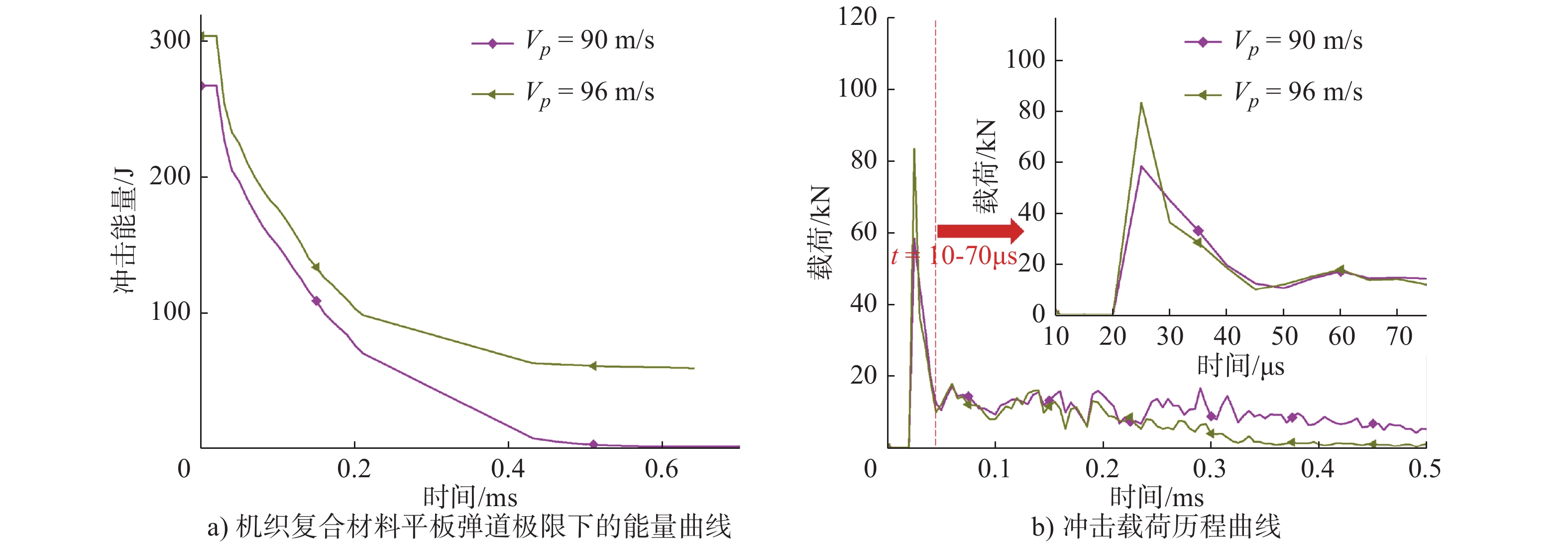
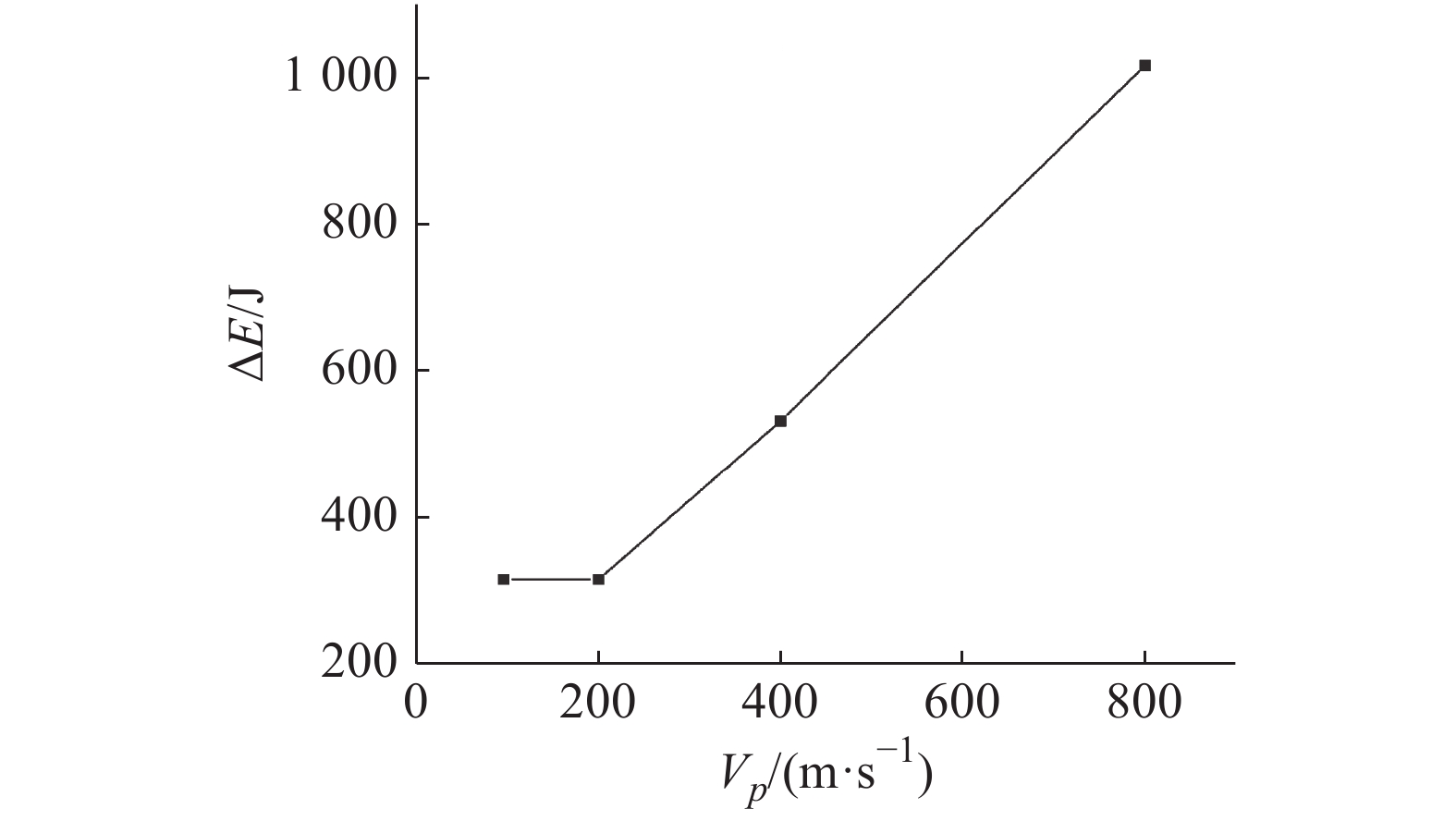
The failure behavior of woven composite panel under high-speed impact through numerical simulation is investigated. Macro-scale detailed finite element model for the woven composite panel is generated by using explicit finite element software, LS-DYNA®. Micromechanical theories are used to determine the basic mechanical properties of the woven composite panel. The Chang-Chang failure criterion is adopted to predict the impact damage modes and ultimate failure of the woven composite panel. High-speed impact tests are conducted to assess the critical penetration threshold and examine the typical impact failure features of the woven composite panel, which is also used to validate the developed numerical model by comparing the simulation results with the experimental. The validated numerical model is then used to investigate the penetration process and impact failure mechanism of the composite panel under various impact velocities (0.1 ~ 0.8 km/s). The numerical results suggest that: the compression damage area in the middle layer of the woven composite panel is smaller than the surface layers; the compression damage area of the woven composite panel decreases with the increase of impact velocity; and the energy absorbed by the composite panel follows a linear relationship with the impact velocity of the projectile in the velocity range of 0.2 ~ 0.8 km/s.
The failure behavior of woven composite panel under high-speed impact through numerical simulation is investigated. Macro-scale detailed finite element model for the woven composite panel is generated by using explicit finite element software, LS-DYNA®. Micromechanical theories are used to determine the basic mechanical properties of the woven composite panel. The Chang-Chang failure criterion is adopted to predict the impact damage modes and ultimate failure of the woven composite panel. High-speed impact tests are conducted to assess the critical penetration threshold and examine the typical impact failure features of the woven composite panel, which is also used to validate the developed numerical model by comparing the simulation results with the experimental. The validated numerical model is then used to investigate the penetration process and impact failure mechanism of the composite panel under various impact velocities (0.1 ~ 0.8 km/s). The numerical results suggest that: the compression damage area in the middle layer of the woven composite panel is smaller than the surface layers; the compression damage area of the woven composite panel decreases with the increase of impact velocity; and the energy absorbed by the composite panel follows a linear relationship with the impact velocity of the projectile in the velocity range of 0.2 ~ 0.8 km/s.






2020, 39(8): 1307-1312.
doi: 10.13433/j.cnki.1003-8728.20190210
Abstract:
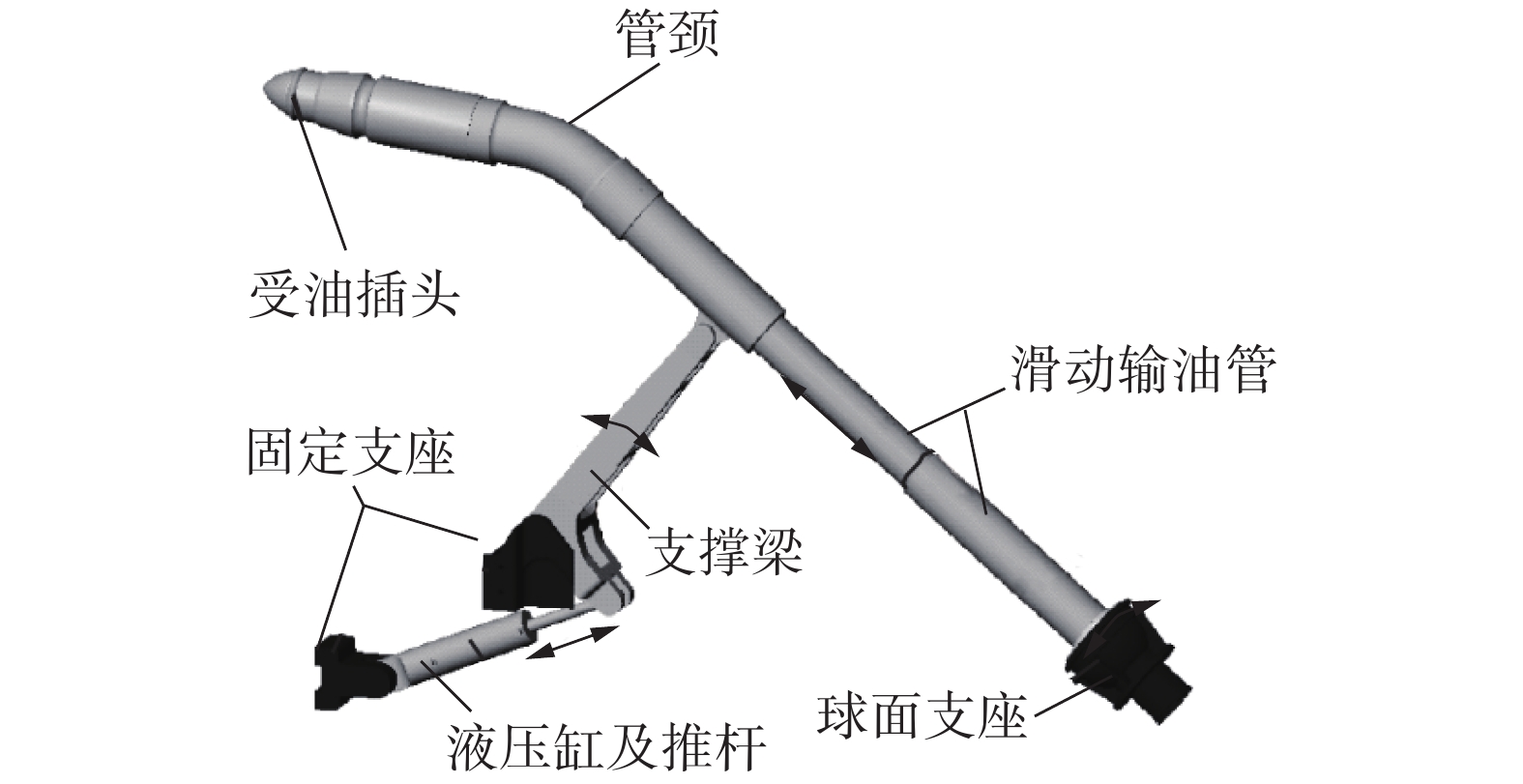
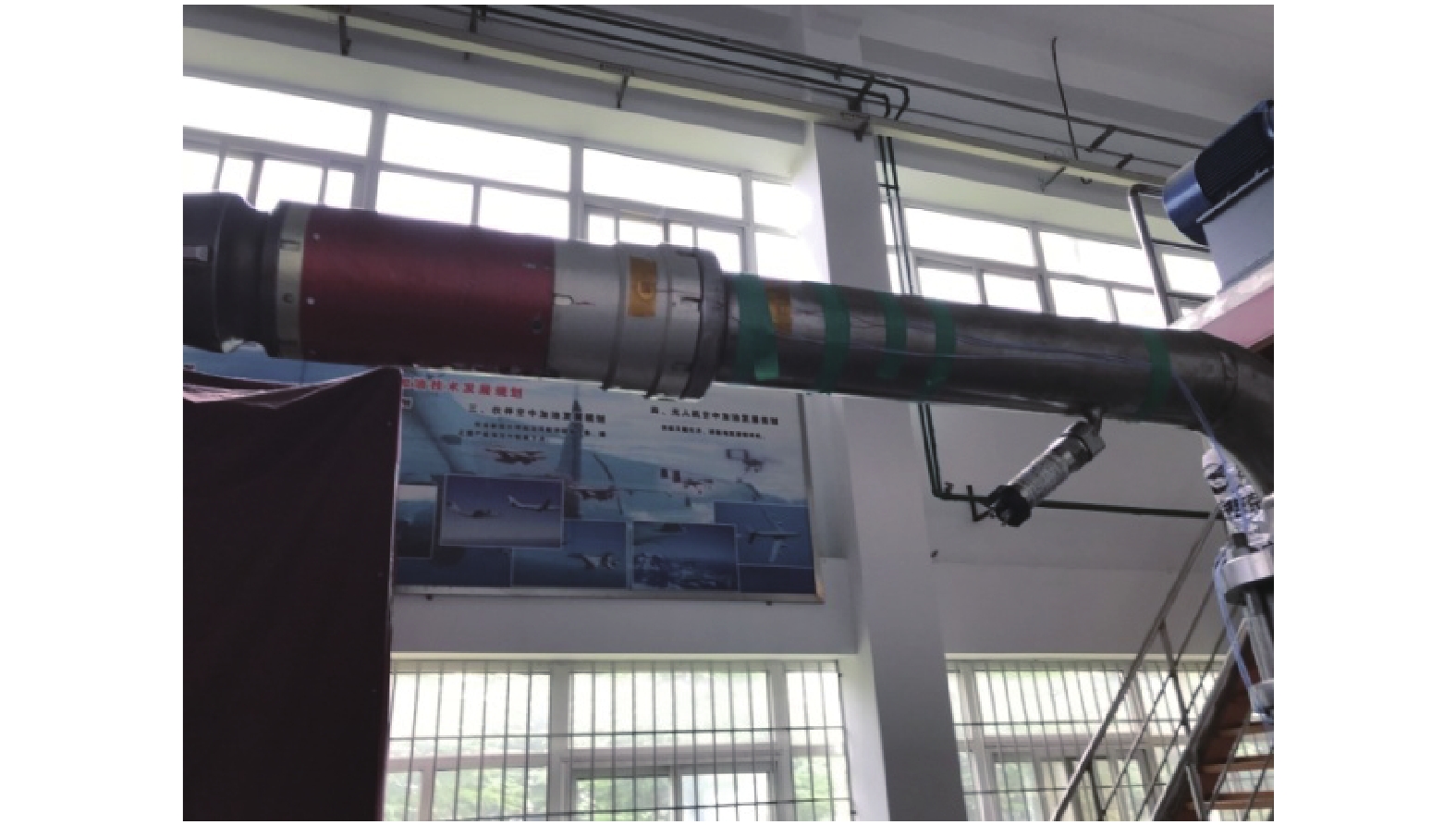
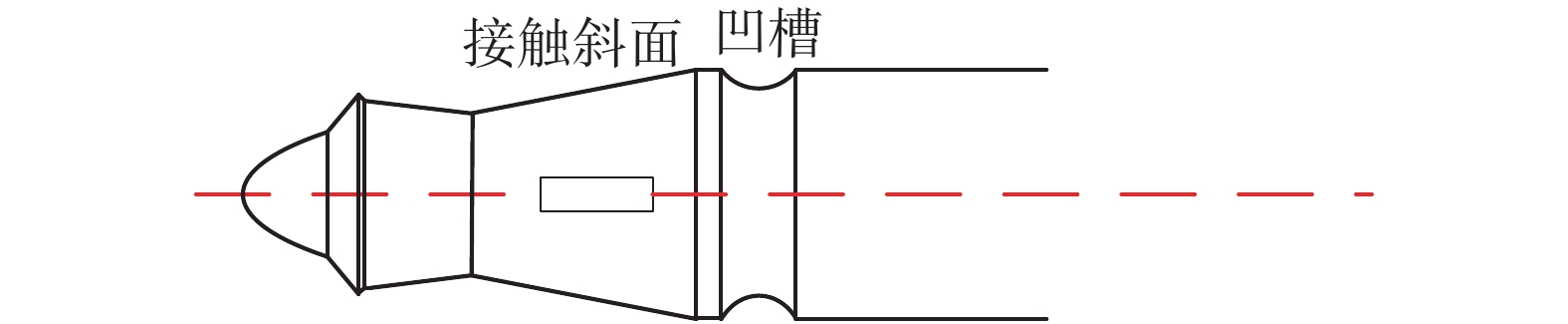
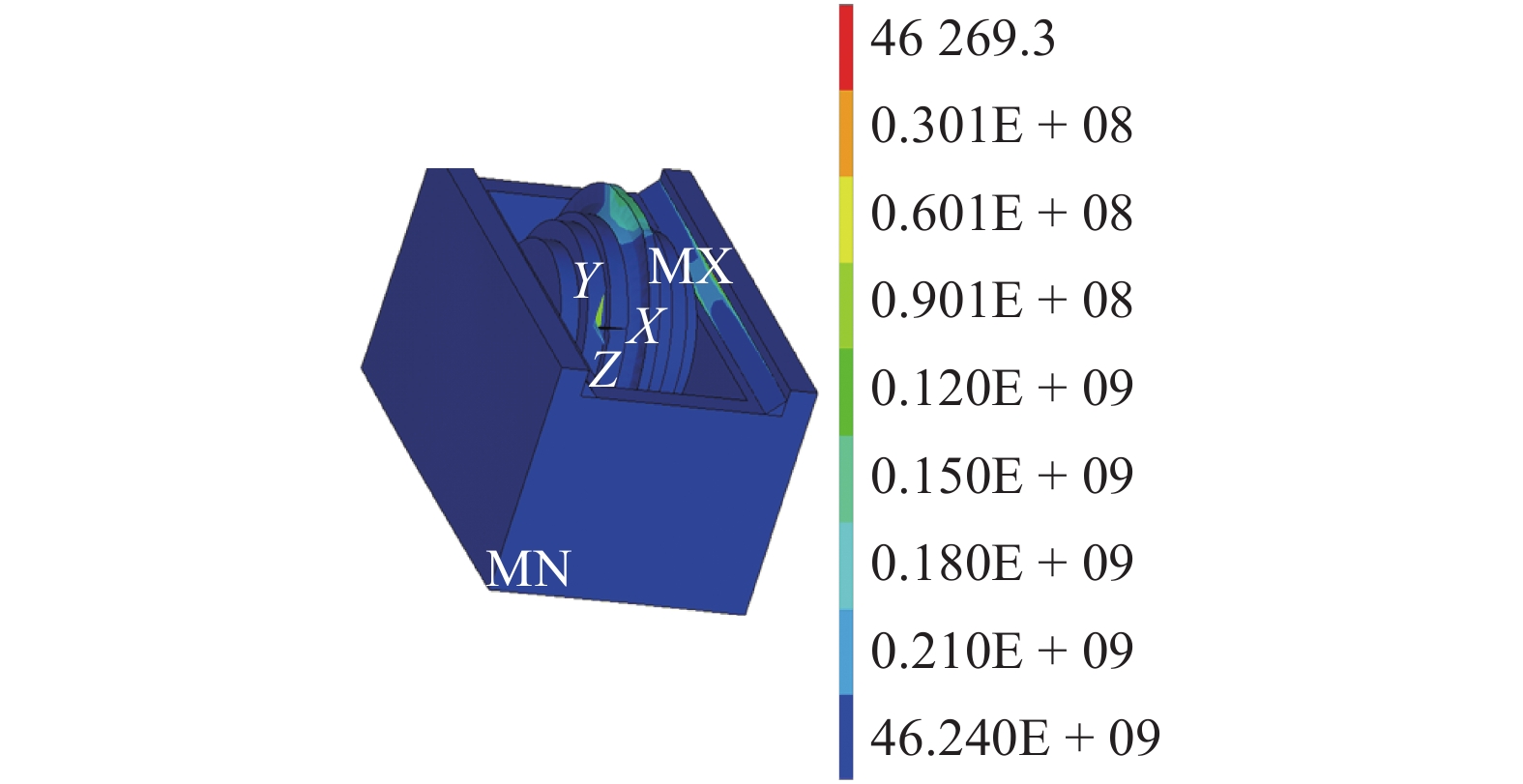
Oil receiving device is an important mechanism of oil receiving machine and oil filling machine to establish oil transmission channel, its load magnitude during docking with refueling equipment is of great significance to structural strength design of refueling equipment. In this paper, according to the structure of oil receiving device, a method for measuring butt load of oil receiving device based on strain electrical measurement principle is proposed. A portable test system during ground debugging test of aerial refueling pod is built, and the idea and method of docking load measurement are verified. The strain data on the receiving pipe during the butting process between the cone sleeve and the receiving plug are obtained, the law of load variation in docking process is analyzed. Based on the geometric model of the receiving tubing, the axial load in the butting process is estimated, the principle and feasibility of docking load measurement for subsequent aerial refueling process are verified.
Oil receiving device is an important mechanism of oil receiving machine and oil filling machine to establish oil transmission channel, its load magnitude during docking with refueling equipment is of great significance to structural strength design of refueling equipment. In this paper, according to the structure of oil receiving device, a method for measuring butt load of oil receiving device based on strain electrical measurement principle is proposed. A portable test system during ground debugging test of aerial refueling pod is built, and the idea and method of docking load measurement are verified. The strain data on the receiving pipe during the butting process between the cone sleeve and the receiving plug are obtained, the law of load variation in docking process is analyzed. Based on the geometric model of the receiving tubing, the axial load in the butting process is estimated, the principle and feasibility of docking load measurement for subsequent aerial refueling process are verified.