


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2020 Vol. 39, No. 10
Display Method:
2020, 39(10): 1477-1482.
doi: 10.13433/j.cnki.1003-8728.20190304
 PDF 2703KB
PDF 2703KB
Abstract:
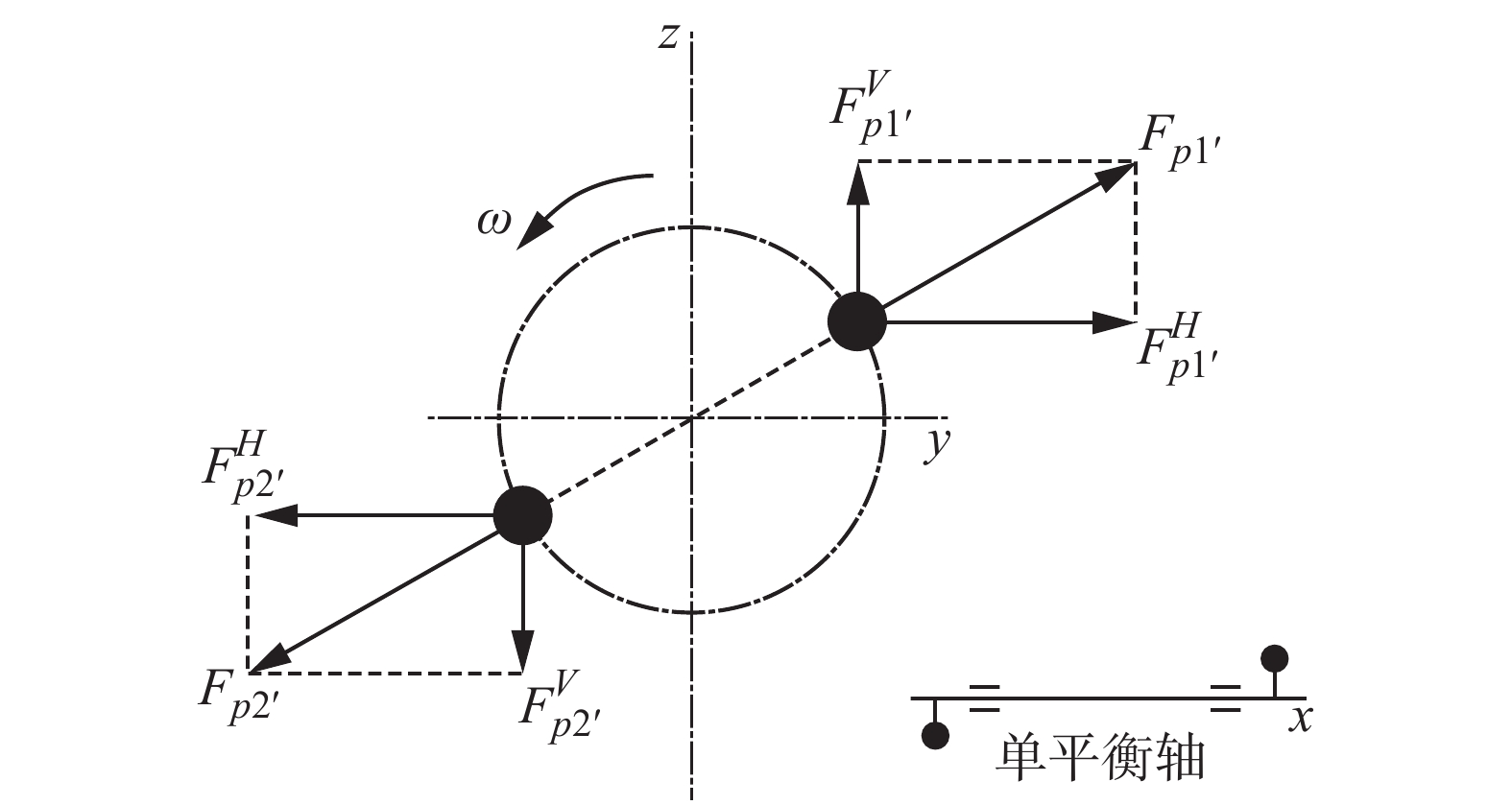
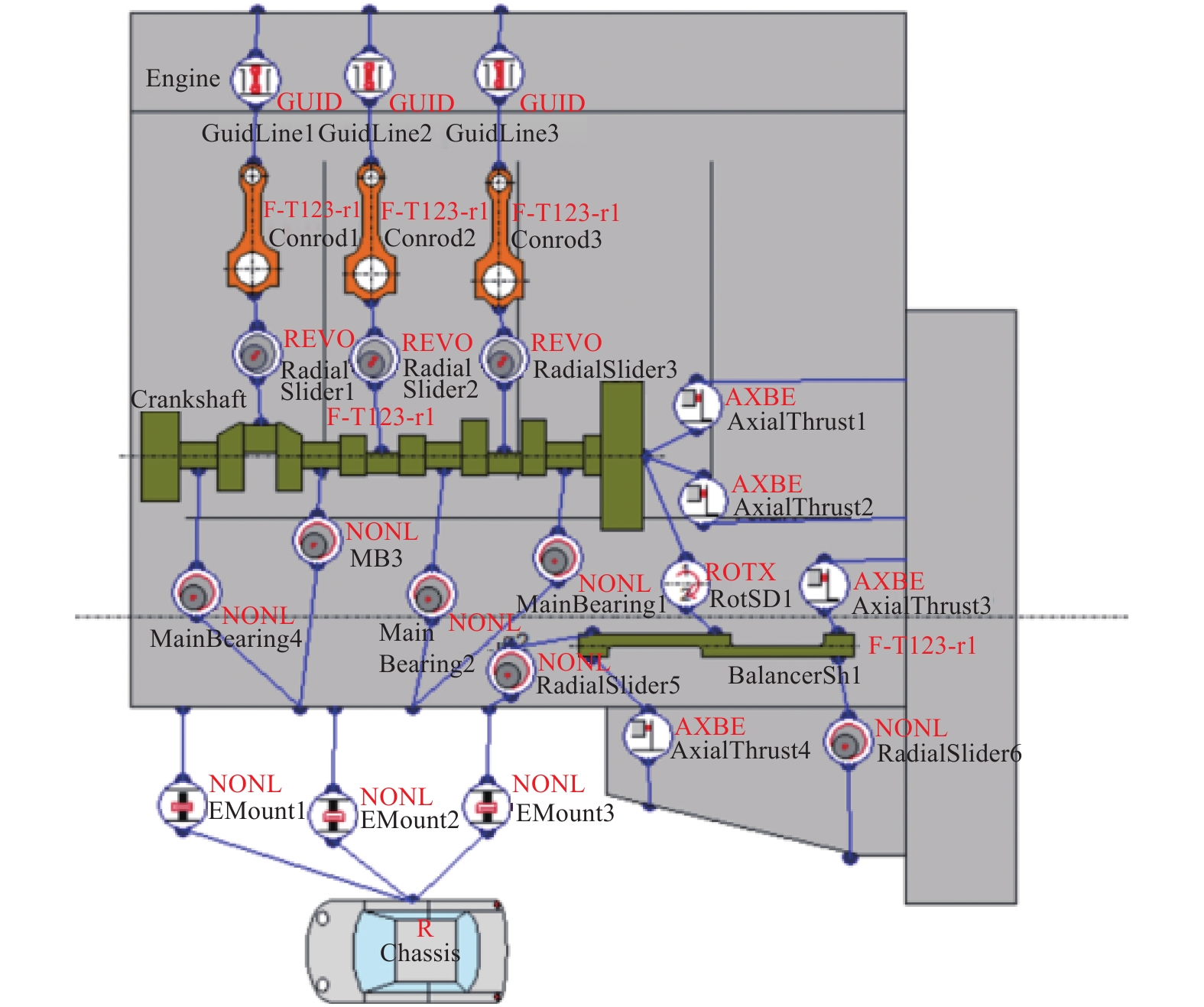
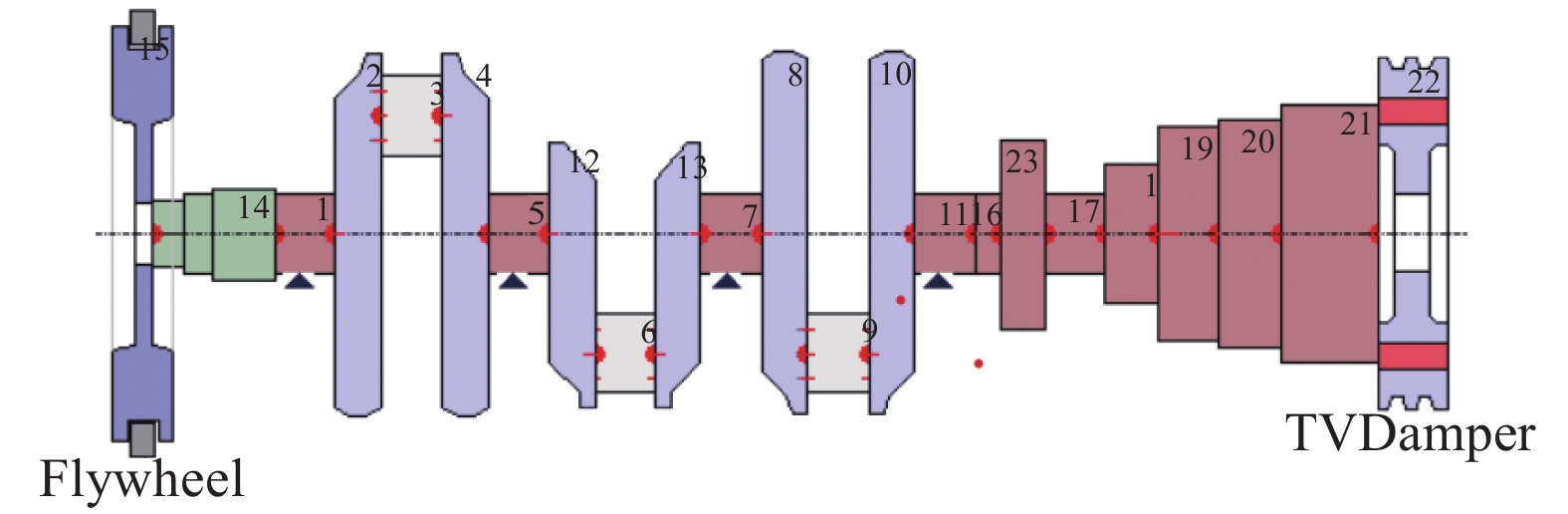
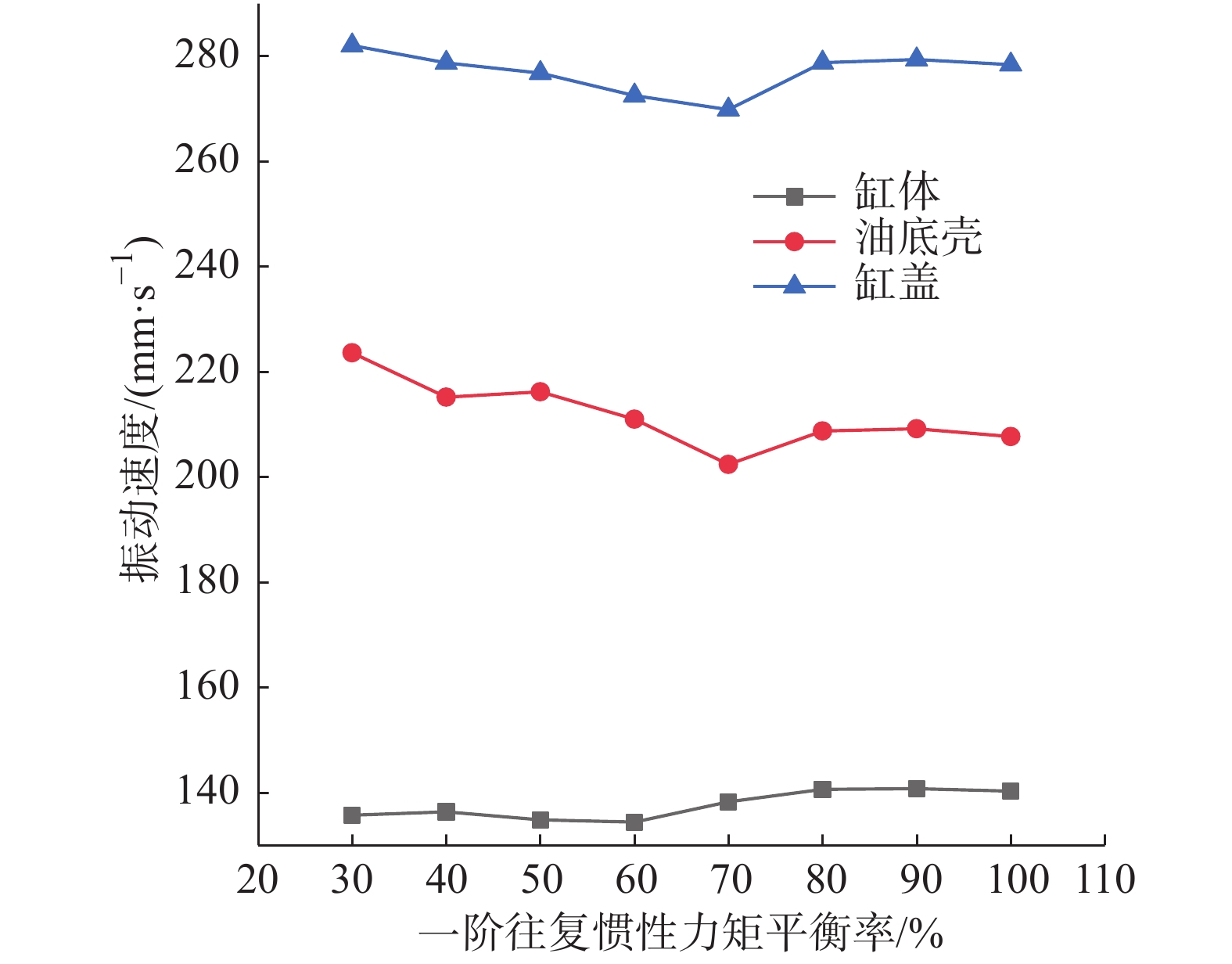
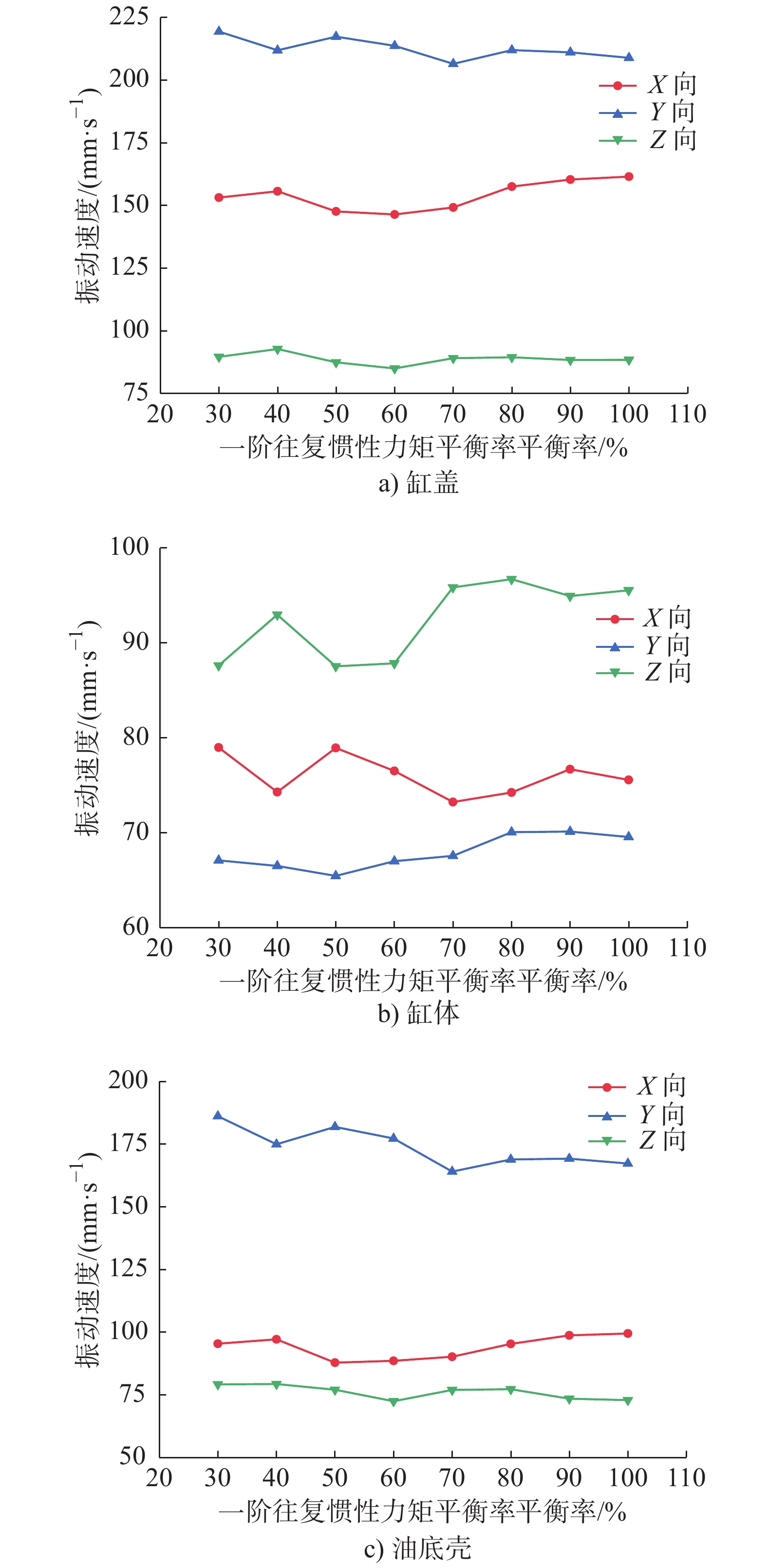
In order to investigate the influence of different first-order reciprocating inertia moment balance ratio on crankshaft torsional vibration and engine surface vibration when three-cylinder gasoline engine adopts single balance shaft, the AVL-EXCITE-Power Unit, which is a kind of multi-body dynamics software is used to establish the engine dynamics model. The torsional vibration of crankshaft and the surface vibration of engine under the balance ratio of 30% to 100% reciprocating moment of inertia are simulated. The results show that the surface vibration of the engine can be reduced by using the method of single balance shaft, but the torsional vibration of the crankshaft can also be increased to some extent. Therefore, the influence of single balance shaft on torsional vibration should also be considered when the vibration reduction of three-cylinder machine is carried out.
In order to investigate the influence of different first-order reciprocating inertia moment balance ratio on crankshaft torsional vibration and engine surface vibration when three-cylinder gasoline engine adopts single balance shaft, the AVL-EXCITE-Power Unit, which is a kind of multi-body dynamics software is used to establish the engine dynamics model. The torsional vibration of crankshaft and the surface vibration of engine under the balance ratio of 30% to 100% reciprocating moment of inertia are simulated. The results show that the surface vibration of the engine can be reduced by using the method of single balance shaft, but the torsional vibration of the crankshaft can also be increased to some extent. Therefore, the influence of single balance shaft on torsional vibration should also be considered when the vibration reduction of three-cylinder machine is carried out.







2020, 39(10): 1483-1488.
doi: 10.13433/j.cnki.1003-8728.20190299
Abstract:
In order to detect the collision between the robot and its surroundings, the collision observer is designed based on the deviation between the generalized momentum of the dynamic model and the actual momentum to detect the collision force. The observer can calculate the theoretical and actual kinetic energy of the robot under the current motion state only using the robot dynamics model, the position and speed of the motor encoder feedback, and the driving torque fed back by the driver without adding additional sensors and acceleration information. The momentum deviation indirectly reflects the magnitude and direction of the collision force, and the collision detection of the robot can be realized by appropriately setting the safety threshold. Simulation and experiments show that the collision detection algorithm can effectively acquire the collision force information, is insensitive to high frequency noise, and has convenient parameter adjustment. It is suitable for collision detection in both static and dynamic situations. Improving the robot dynamics model parameters and the joint friction coefficient can further improve the observer's detection accuracy of collision force information, reduce the safety threshold, and improve the sensitivity of collision detection.
In order to detect the collision between the robot and its surroundings, the collision observer is designed based on the deviation between the generalized momentum of the dynamic model and the actual momentum to detect the collision force. The observer can calculate the theoretical and actual kinetic energy of the robot under the current motion state only using the robot dynamics model, the position and speed of the motor encoder feedback, and the driving torque fed back by the driver without adding additional sensors and acceleration information. The momentum deviation indirectly reflects the magnitude and direction of the collision force, and the collision detection of the robot can be realized by appropriately setting the safety threshold. Simulation and experiments show that the collision detection algorithm can effectively acquire the collision force information, is insensitive to high frequency noise, and has convenient parameter adjustment. It is suitable for collision detection in both static and dynamic situations. Improving the robot dynamics model parameters and the joint friction coefficient can further improve the observer's detection accuracy of collision force information, reduce the safety threshold, and improve the sensitivity of collision detection.












2020, 39(10): 1489-1496.
doi: 10.13433/j.cnki.1003-8728.20200133
Abstract:
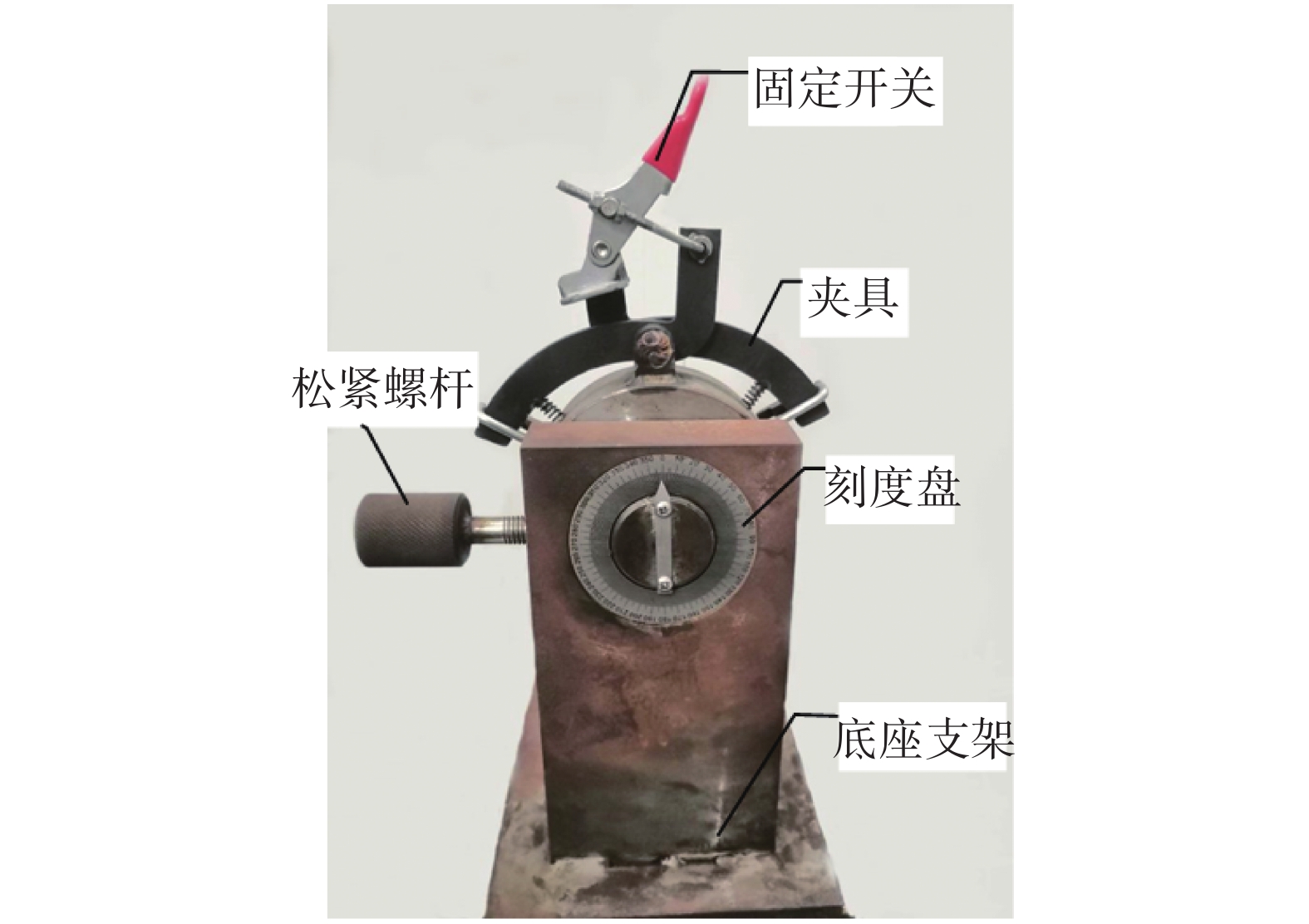
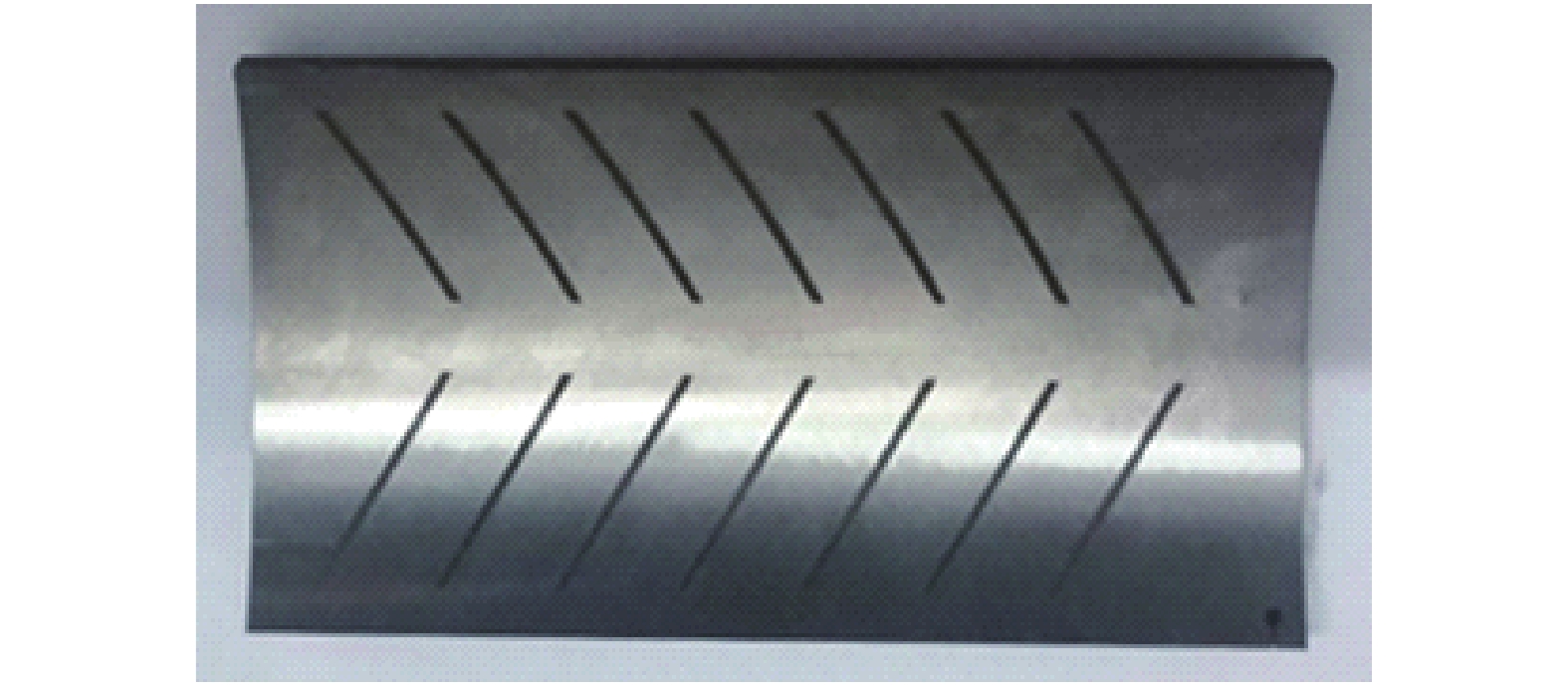
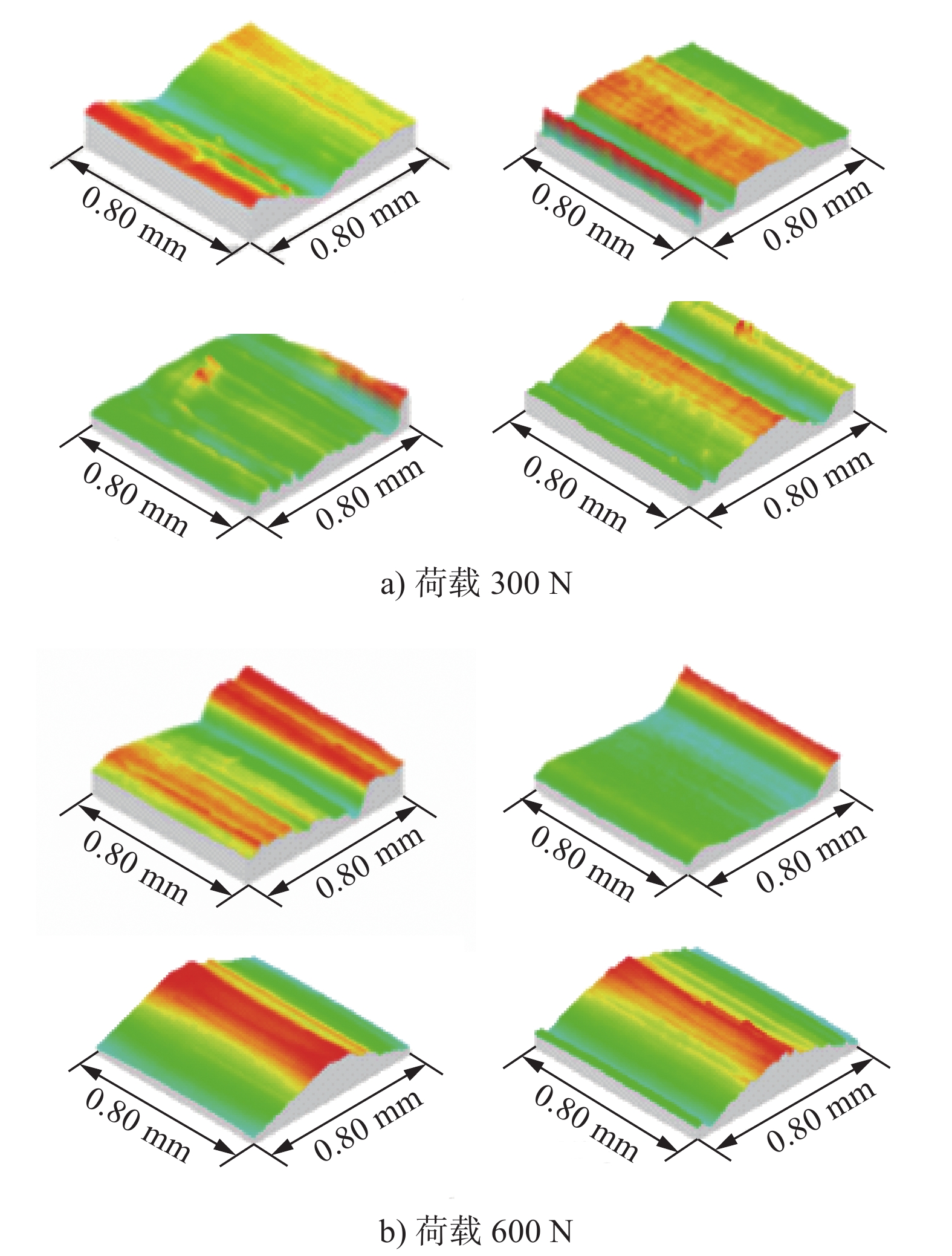
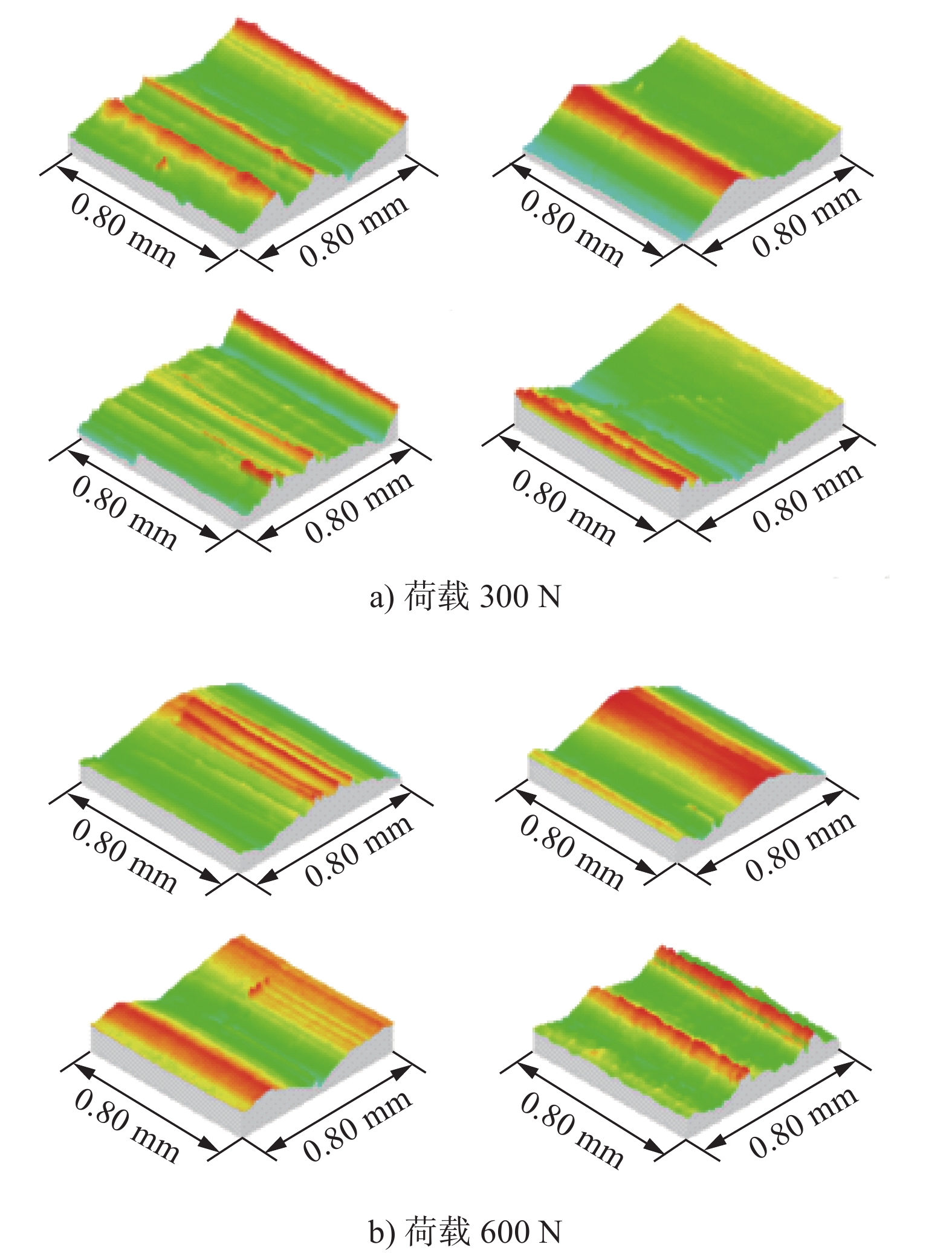
The cylinder liner-piston ring (CLPR) is one of the main friction pair in marine diesel engine. To investigate the influence of the texture density in the surface of piston ring on the tribological performance of CLPR, piston rings with circular dimples of different texture densities were tested on the MWF-10 reciprocating friction and wear tester. The test data under different simulation conditions were obtained by adjusting the tested applied loads and rotational speeds. The influence of the texture density in the surface of piston ring on the friction pair of the CLPR was analyzed with the tested parameters. The results indicate that the piston rings with circular pits at the different surface texture densities can reduce the friction coefficient of the friction pair to different degrees. The results indicated that circular textured piston rings with different texture densities could reduce the friction coefficient and improve their tribological properties to different degrees. According to the comprehensive analysis of friction coefficients and surface morphologies, it can be known that when the load is constant under the tested conditions, an appropriate texture density (\begin{document}${S\!_p}$\end{document} ![]()
![]()
The cylinder liner-piston ring (CLPR) is one of the main friction pair in marine diesel engine. To investigate the influence of the texture density in the surface of piston ring on the tribological performance of CLPR, piston rings with circular dimples of different texture densities were tested on the MWF-10 reciprocating friction and wear tester. The test data under different simulation conditions were obtained by adjusting the tested applied loads and rotational speeds. The influence of the texture density in the surface of piston ring on the friction pair of the CLPR was analyzed with the tested parameters. The results indicate that the piston rings with circular pits at the different surface texture densities can reduce the friction coefficient of the friction pair to different degrees. The results indicated that circular textured piston rings with different texture densities could reduce the friction coefficient and improve their tribological properties to different degrees. According to the comprehensive analysis of friction coefficients and surface morphologies, it can be known that when the load is constant under the tested conditions, an appropriate texture density (







2020, 39(10): 1497-1504.
doi: 10.13433/j.cnki.1003-8728.20190313
Abstract:
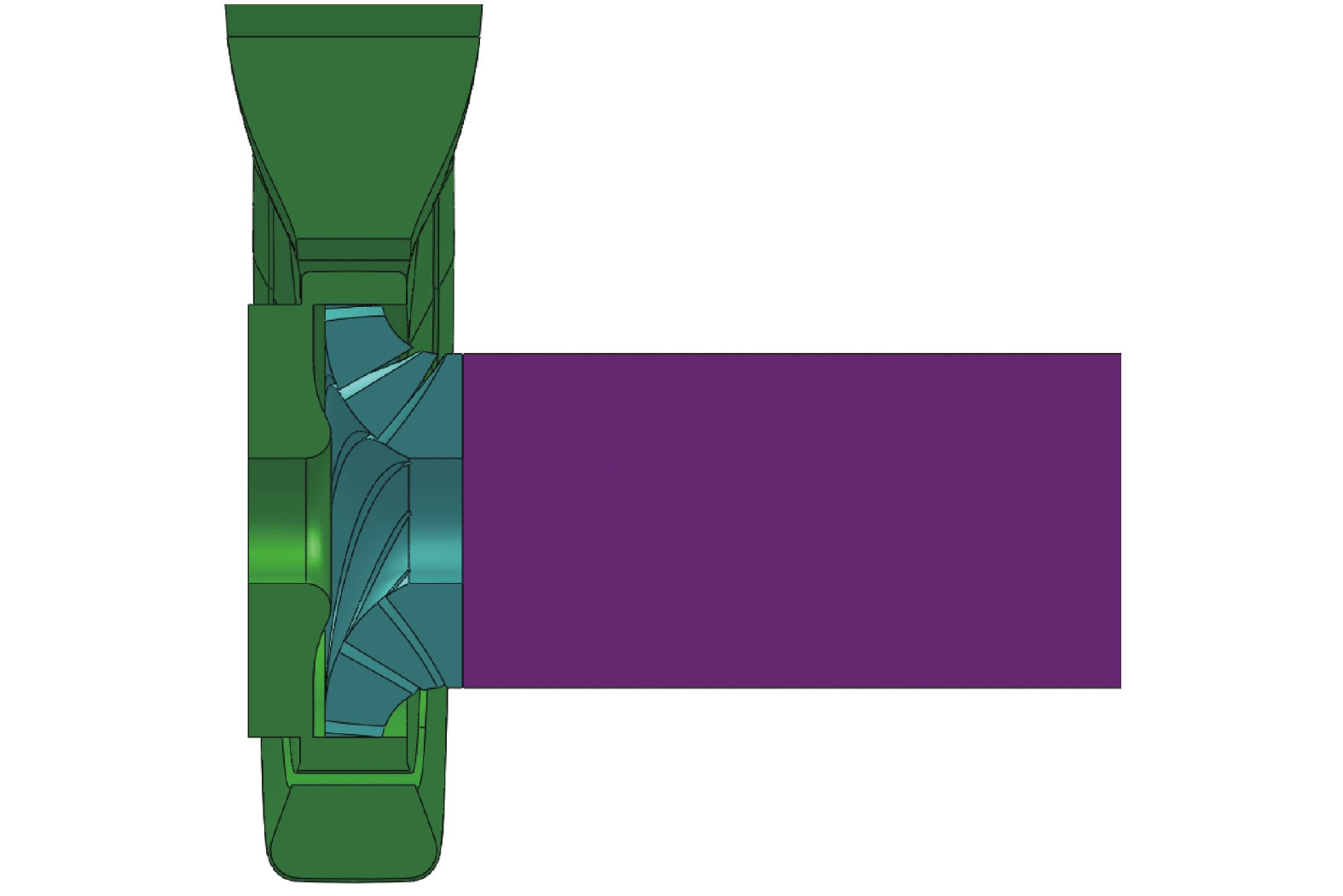
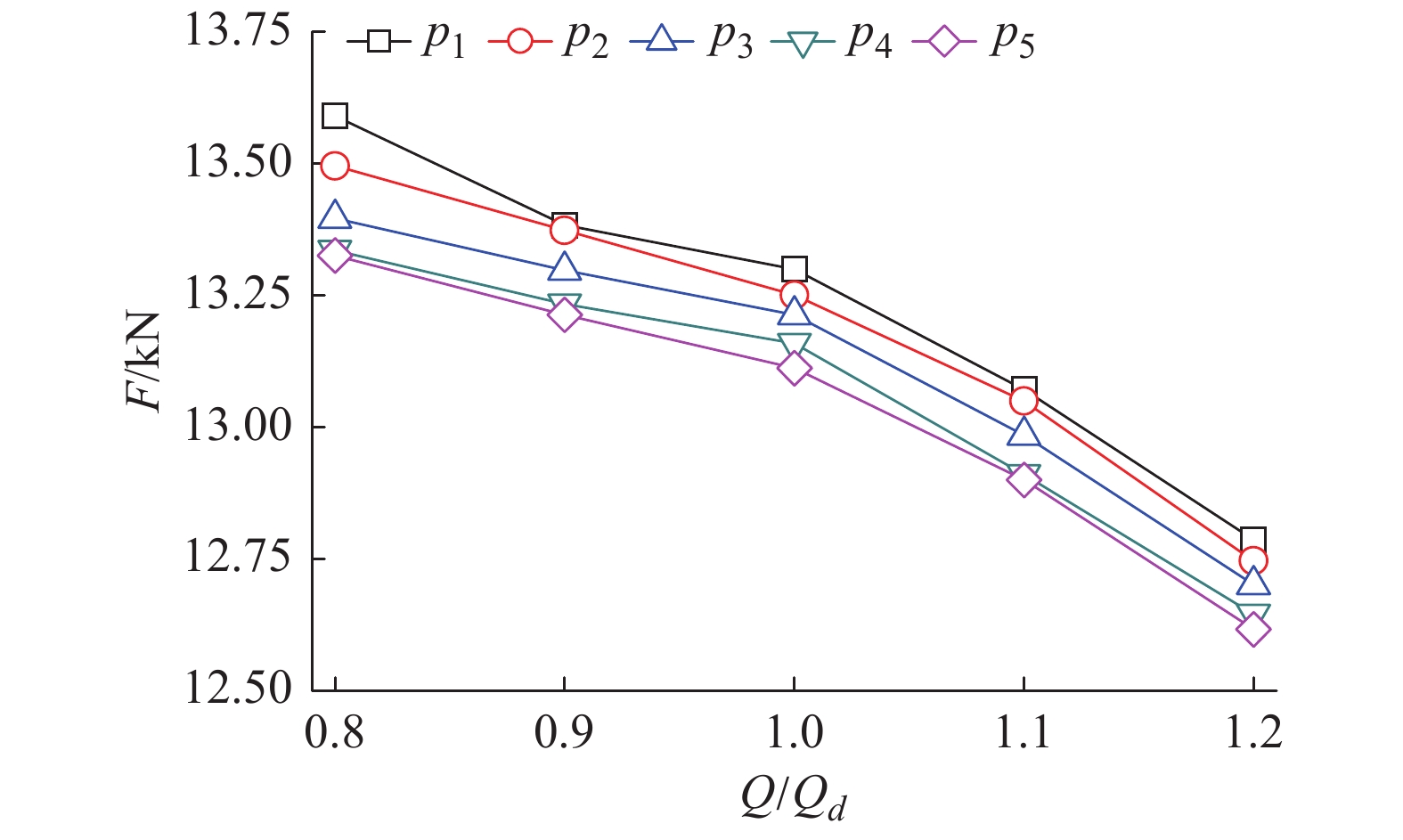
The inlet pressure of a high-pressure centrifugal pump affectsits axial force. A high-pressure and semi-open impeller centrifugal pump was selected in the working area of 0.8 ~ 1.2 Qd. Based on the comparison of external characteristics of numerical calculation with the experimental result, the distribution patterns of axial forces ( F1, F2, F3 and F4) were analyzed in detail when the inlet pressure was 7.8, 7.9, 8.0, 8.1 and 8.2 MPa respectively. The change curve of the increase rate of each axial force was drawn. At the designed flow rate of 1.0 Qd , the pressure distribution characteristics of the inner and outer walls of the impeller cover, the working face of the blade and the back of the blade were demonstrated. The approximate calculation method for axial force on the outer wall of the impeller cover was obtained. The research results show that at the same flow rate, the larger the inlet pressure is, the larger the axial forces ( F1, F2, F3 and F4) are, and the smaller the total axial force F of the centrifugal pump is. At the same inlet pressure, the axial force F4 is not affected by flow change. The larger the flow rate, the smaller the total axial force F of the centrifugal pump. Therefore, this research can provide certain guidance for reducing the axial force of the high-pressure centrifugal pump and improving its operation stability.
The inlet pressure of a high-pressure centrifugal pump affectsits axial force. A high-pressure and semi-open impeller centrifugal pump was selected in the working area of 0.8 ~ 1.2 Qd. Based on the comparison of external characteristics of numerical calculation with the experimental result, the distribution patterns of axial forces ( F1, F2, F3 and F4) were analyzed in detail when the inlet pressure was 7.8, 7.9, 8.0, 8.1 and 8.2 MPa respectively. The change curve of the increase rate of each axial force was drawn. At the designed flow rate of 1.0 Qd , the pressure distribution characteristics of the inner and outer walls of the impeller cover, the working face of the blade and the back of the blade were demonstrated. The approximate calculation method for axial force on the outer wall of the impeller cover was obtained. The research results show that at the same flow rate, the larger the inlet pressure is, the larger the axial forces ( F1, F2, F3 and F4) are, and the smaller the total axial force F of the centrifugal pump is. At the same inlet pressure, the axial force F4 is not affected by flow change. The larger the flow rate, the smaller the total axial force F of the centrifugal pump. Therefore, this research can provide certain guidance for reducing the axial force of the high-pressure centrifugal pump and improving its operation stability.







2020, 39(10): 1505-1510.
doi: 10.13433/j.cnki.1003-8728.20190273
Abstract:
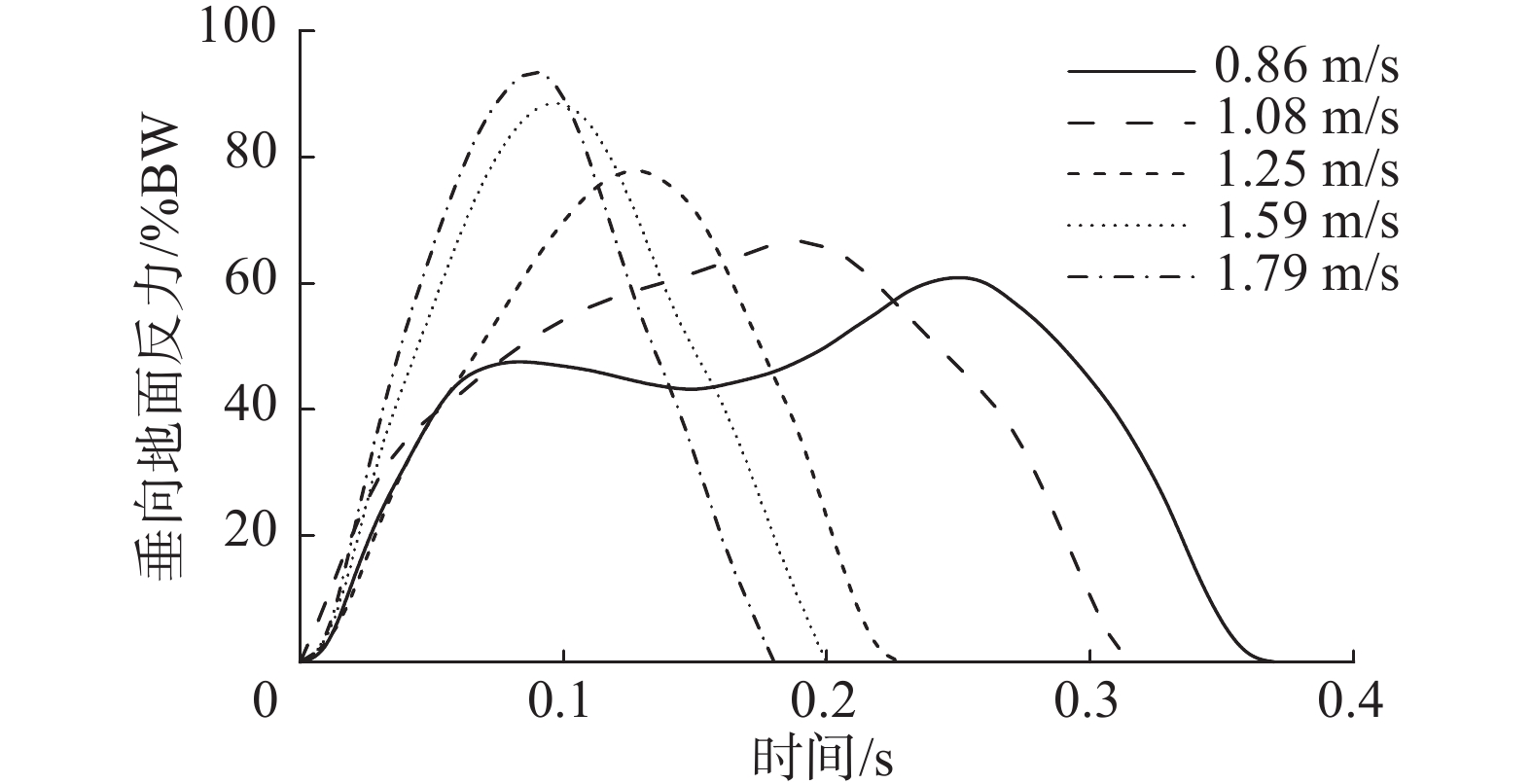
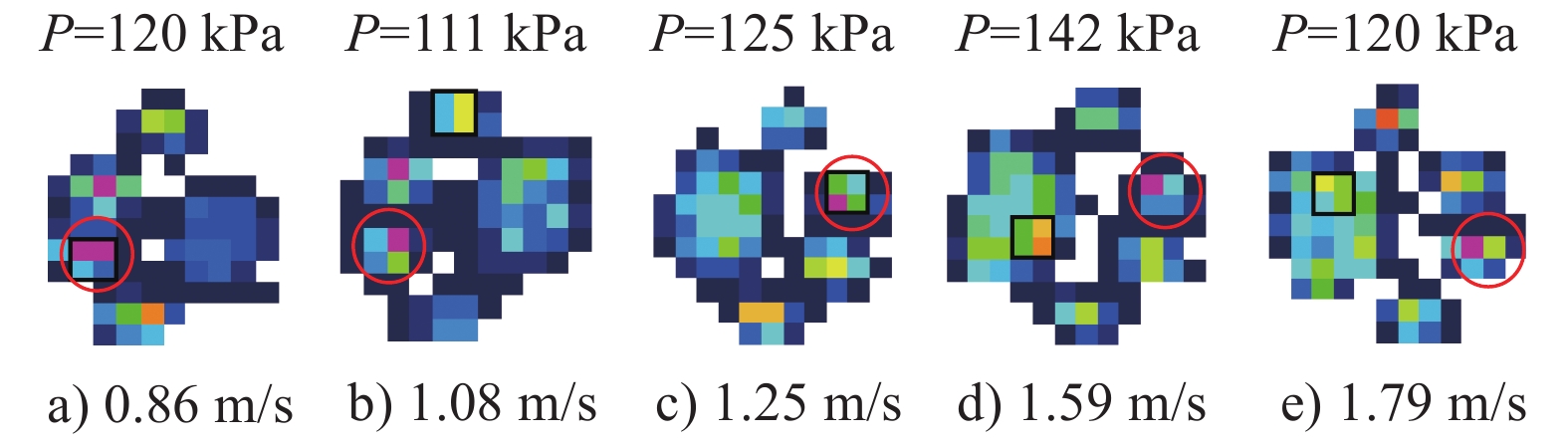
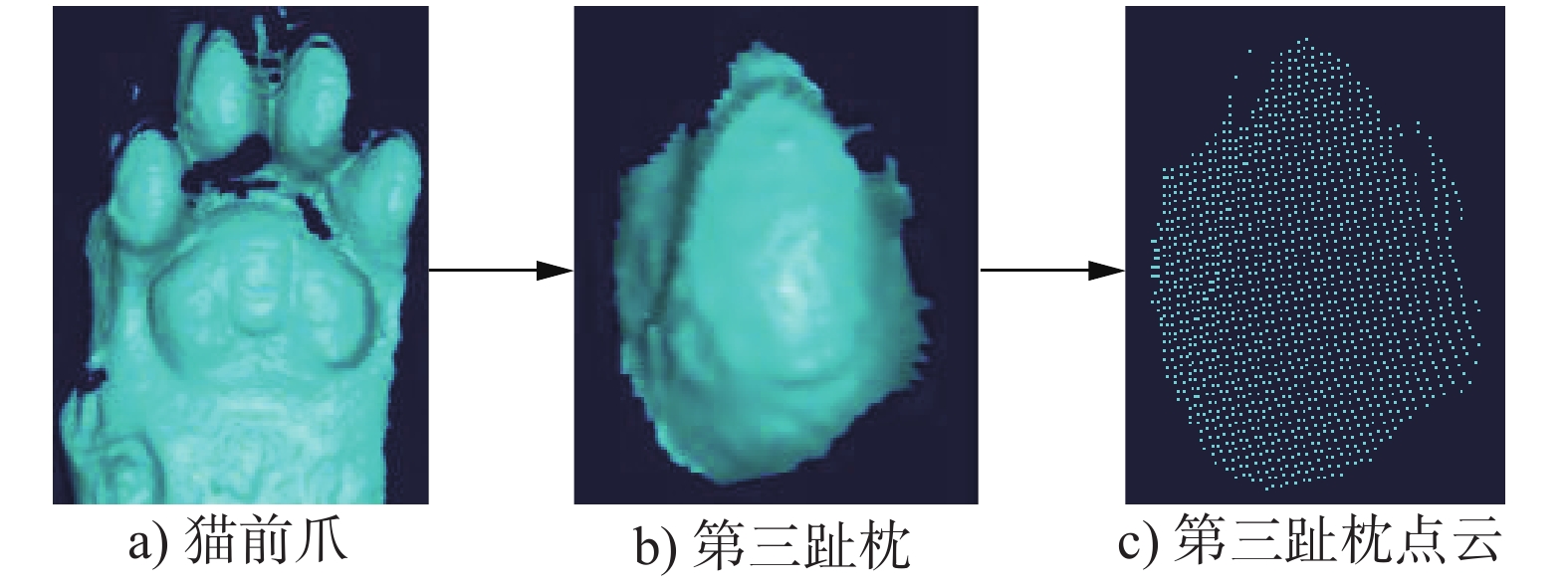
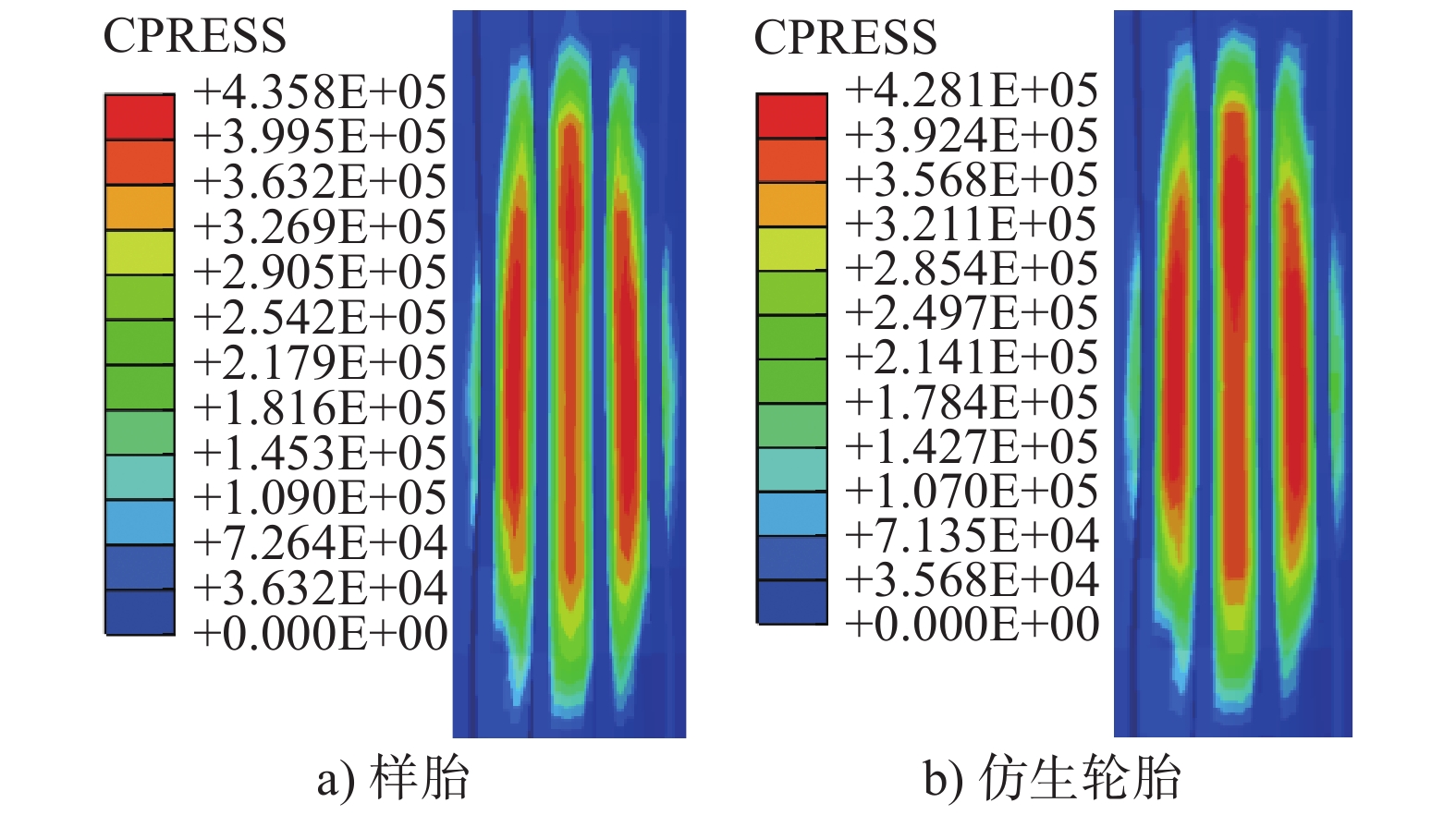
The contact patch area of the two-wheel motorcycle tire is small, which directly affects the accelerating, braking and handling stability of the motorcycle. To resolve this problem, bionic design method was carried out on the crown of motorcycle tires. The dynamic grounding characteristics and topology of the cat-paw pads were investigated using a pressure-sensitive WALKWAY system and 3D laser scanner. Results of tests manifested that the third toe pad of cat forepaw had excellent grip performance. According to the similar principle, the tire crown was bionic designed based on the cross-section fitting curve of the third toe pad. The grounding characteristics of specimen and bionic designed tire were simulated for static, accelerating, braking and steering working conditions by ABAQUS. Comparison results expressed that bionic designed tire increased the grounding area and improved the uniformity of the pressure distribution under different working conditions, which enhanced the grip performance and wear resistance of the tire. Bionic designed tires enhance the accelerating, braking and handling stability of motorcycle.
The contact patch area of the two-wheel motorcycle tire is small, which directly affects the accelerating, braking and handling stability of the motorcycle. To resolve this problem, bionic design method was carried out on the crown of motorcycle tires. The dynamic grounding characteristics and topology of the cat-paw pads were investigated using a pressure-sensitive WALKWAY system and 3D laser scanner. Results of tests manifested that the third toe pad of cat forepaw had excellent grip performance. According to the similar principle, the tire crown was bionic designed based on the cross-section fitting curve of the third toe pad. The grounding characteristics of specimen and bionic designed tire were simulated for static, accelerating, braking and steering working conditions by ABAQUS. Comparison results expressed that bionic designed tire increased the grounding area and improved the uniformity of the pressure distribution under different working conditions, which enhanced the grip performance and wear resistance of the tire. Bionic designed tires enhance the accelerating, braking and handling stability of motorcycle.








2020, 39(10): 1511-1519.
doi: 10.13433/j.cnki.1003-8728.20190309
Abstract:
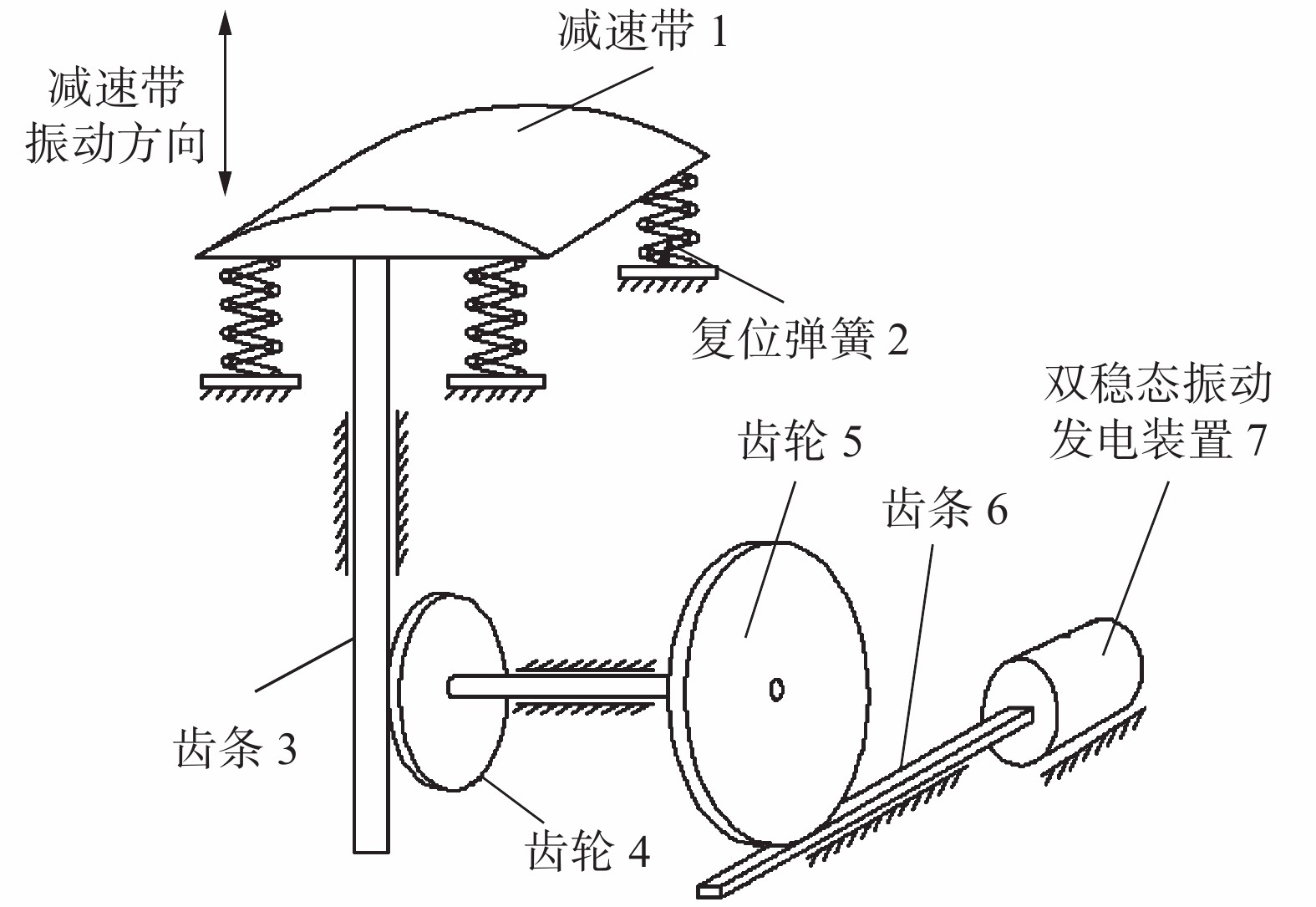
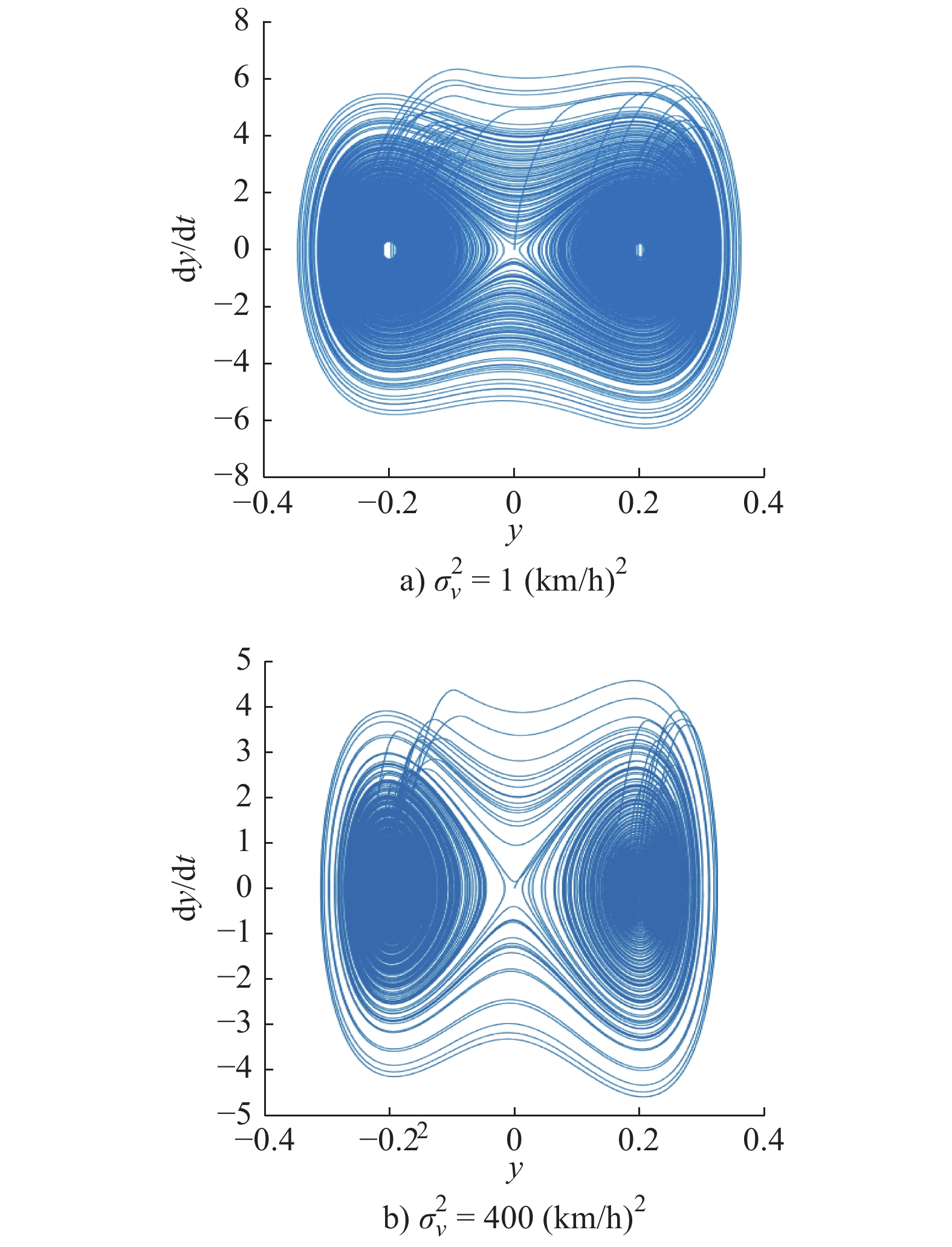
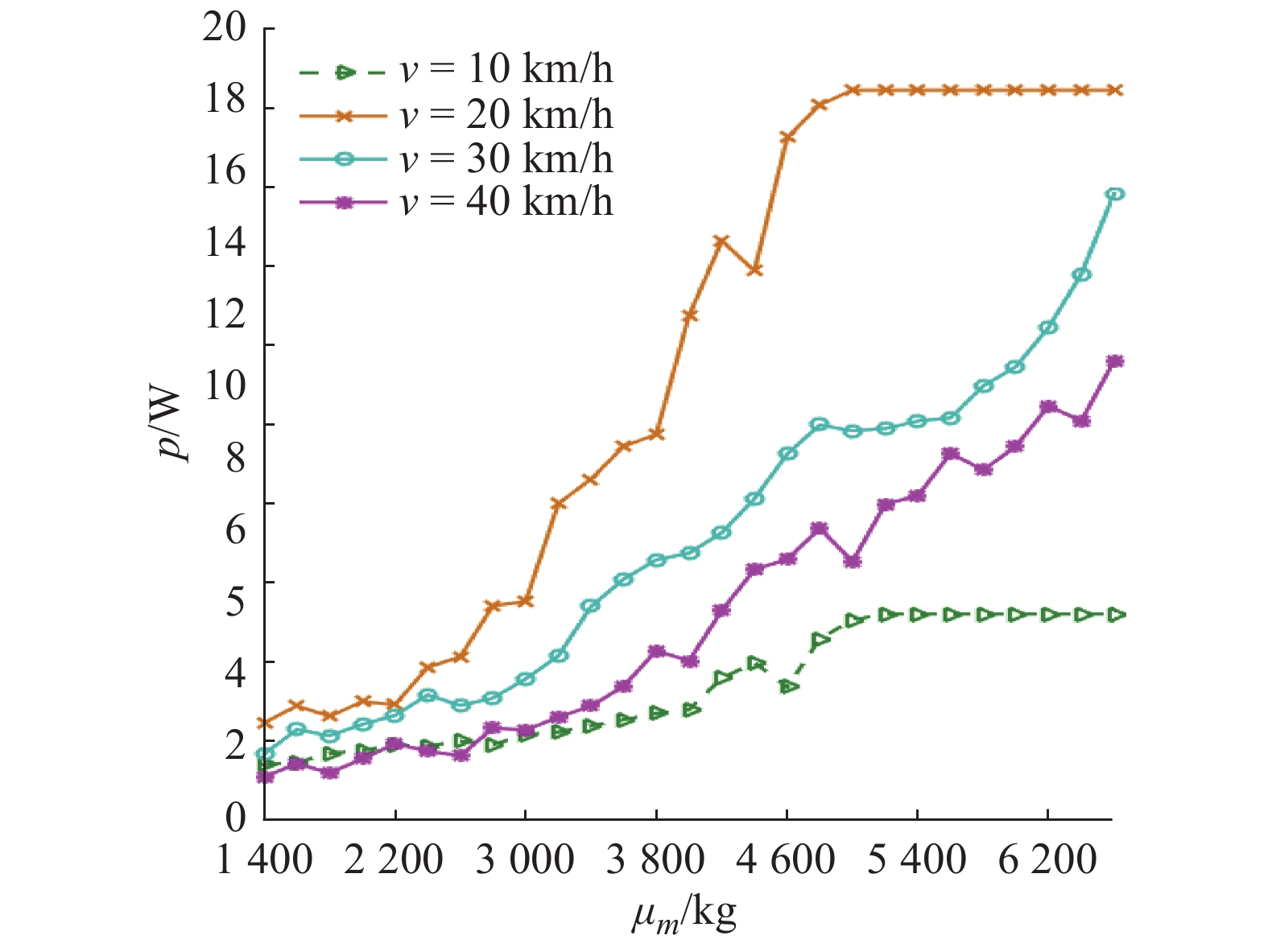
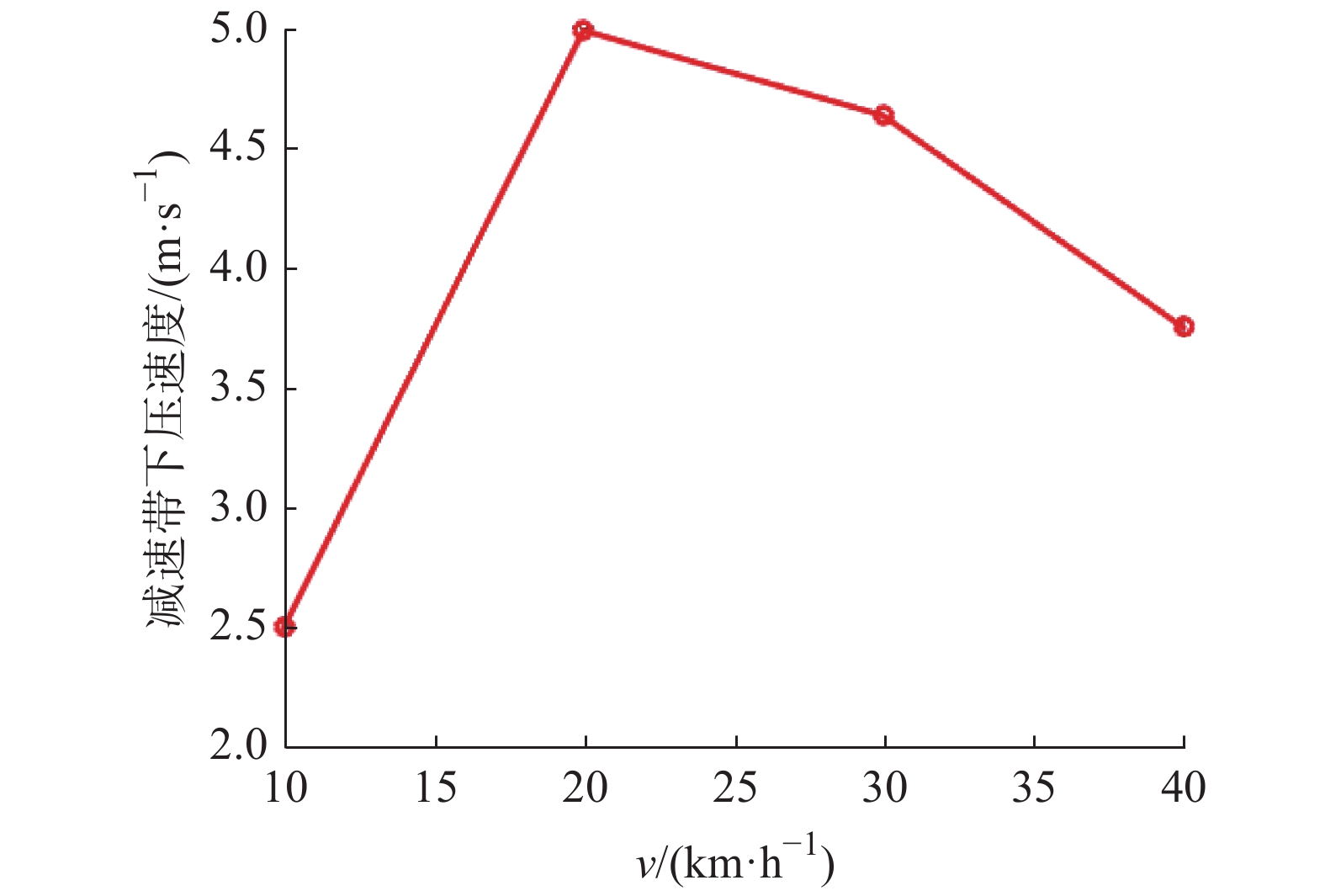
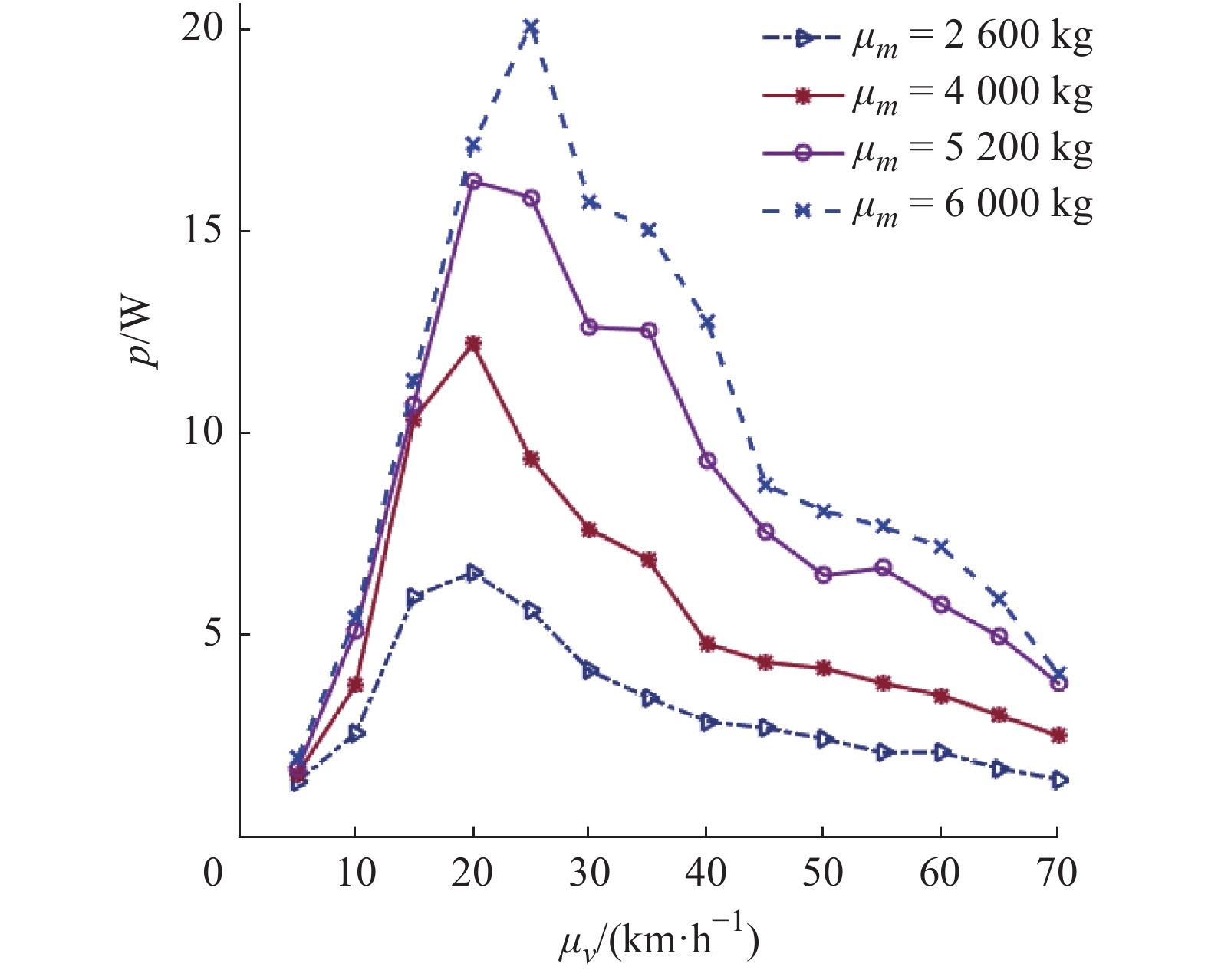
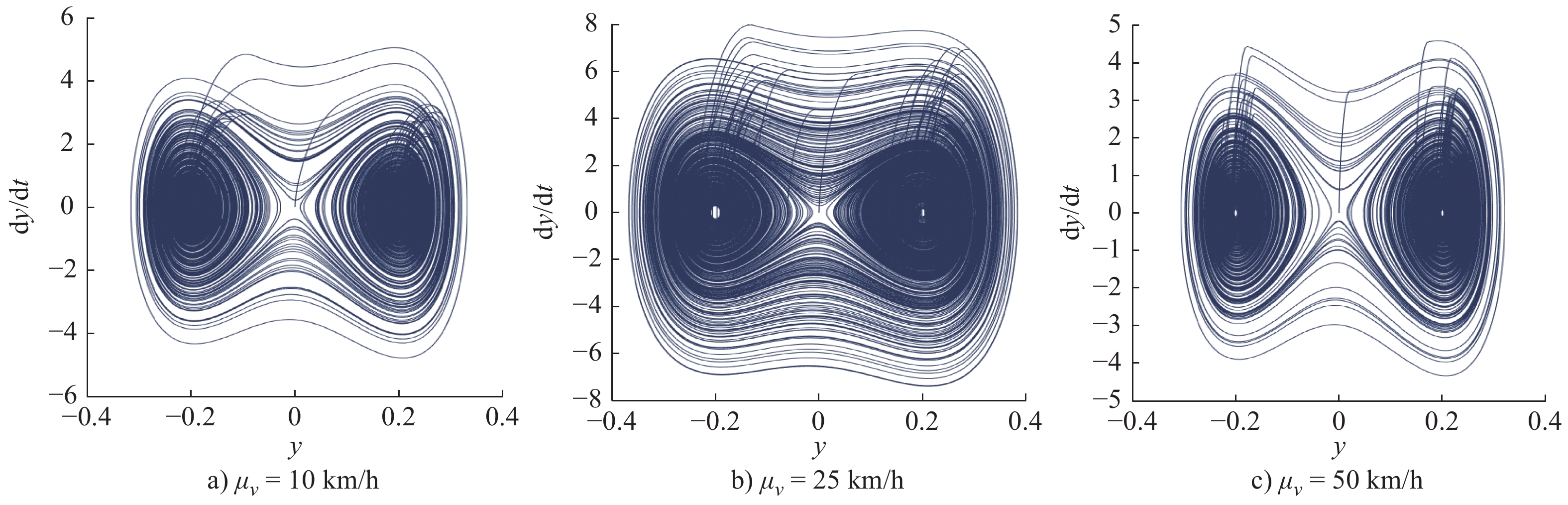
A bistable speed bump vibration energy harvester (BSBVEH) is put forward by combing the bistable vibration energy power generation with the structure of the bump speed. The mechanical models and governing equations of the BSBVEH are established. The mass and speed of the vehicle are considered as random variables that obey the normal distribution. The two types of random excitation of the speed bump are considered in the study, one excitation is that one of the vehicle mass and speed obeys the normal distribution; the other excitation is that each of the vehicle mass and speed obeys the normal distribution. The effect laws of the mean and variance of the vehicle mass and speed on the power generation of the BSBVEH are studied by simulations. The simulation results indicate that the generation powers of the BSBVEH increase with the increasing of the mean and variance of the vehicle mass. When the generation power of the BSBVEH arrives maximum value, the vehicle speeds are different with the different vehicle mass passing the speed bump. The optimal speed is between 20 km/h and 25 km/h. The generation power of the BSBVEH decreases with the increasing of the variance of the vehicle speed. The power generation oscillator of the BSBVEH behaves the large-amplitude motion between the two equilibrium points when the output power of the BSBVEH is bigger.
A bistable speed bump vibration energy harvester (BSBVEH) is put forward by combing the bistable vibration energy power generation with the structure of the bump speed. The mechanical models and governing equations of the BSBVEH are established. The mass and speed of the vehicle are considered as random variables that obey the normal distribution. The two types of random excitation of the speed bump are considered in the study, one excitation is that one of the vehicle mass and speed obeys the normal distribution; the other excitation is that each of the vehicle mass and speed obeys the normal distribution. The effect laws of the mean and variance of the vehicle mass and speed on the power generation of the BSBVEH are studied by simulations. The simulation results indicate that the generation powers of the BSBVEH increase with the increasing of the mean and variance of the vehicle mass. When the generation power of the BSBVEH arrives maximum value, the vehicle speeds are different with the different vehicle mass passing the speed bump. The optimal speed is between 20 km/h and 25 km/h. The generation power of the BSBVEH decreases with the increasing of the variance of the vehicle speed. The power generation oscillator of the BSBVEH behaves the large-amplitude motion between the two equilibrium points when the output power of the BSBVEH is bigger.












2020, 39(10): 1520-1525.
doi: 10.13433/j.cnki.1003-8728.20190266
Abstract:
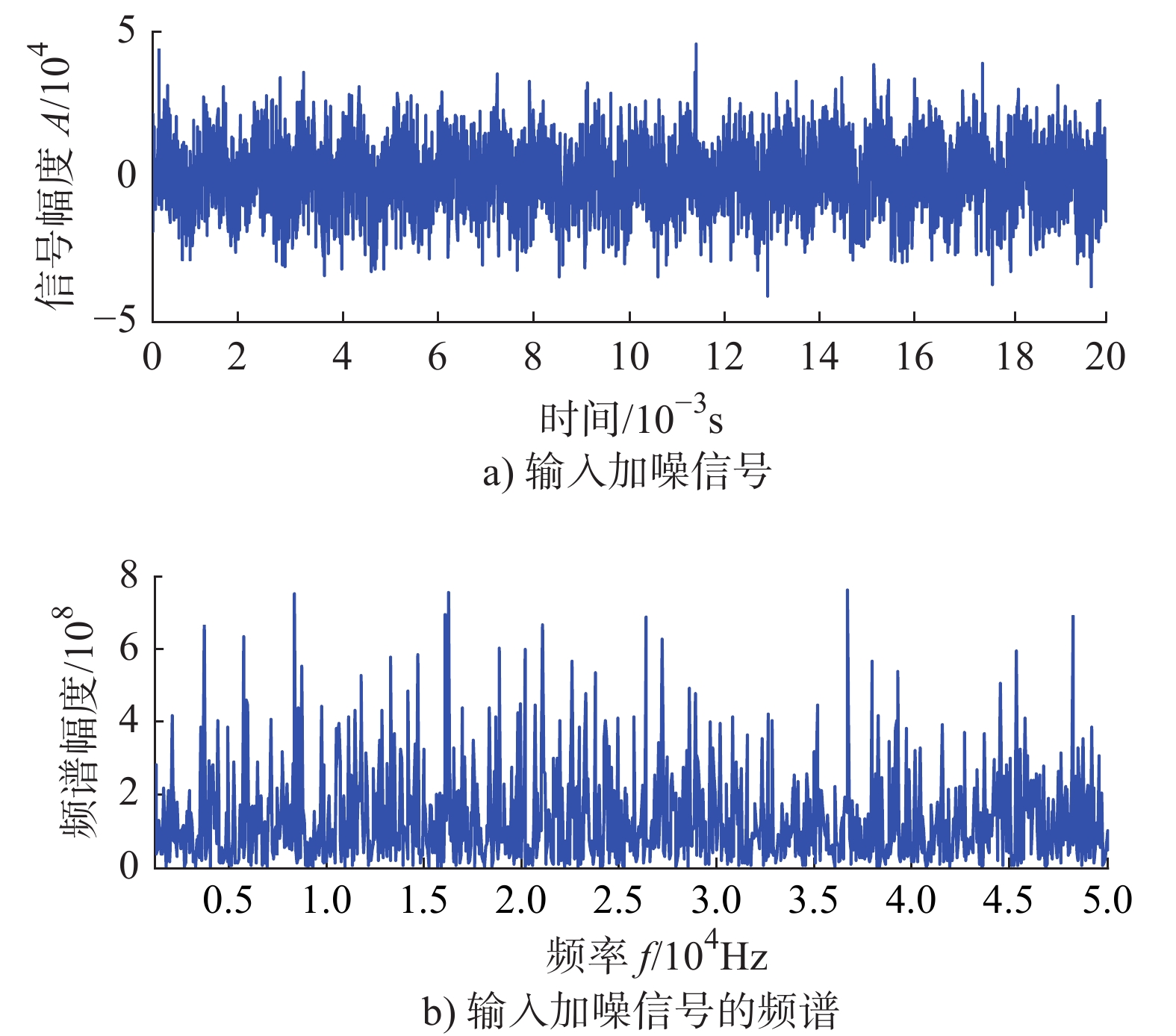
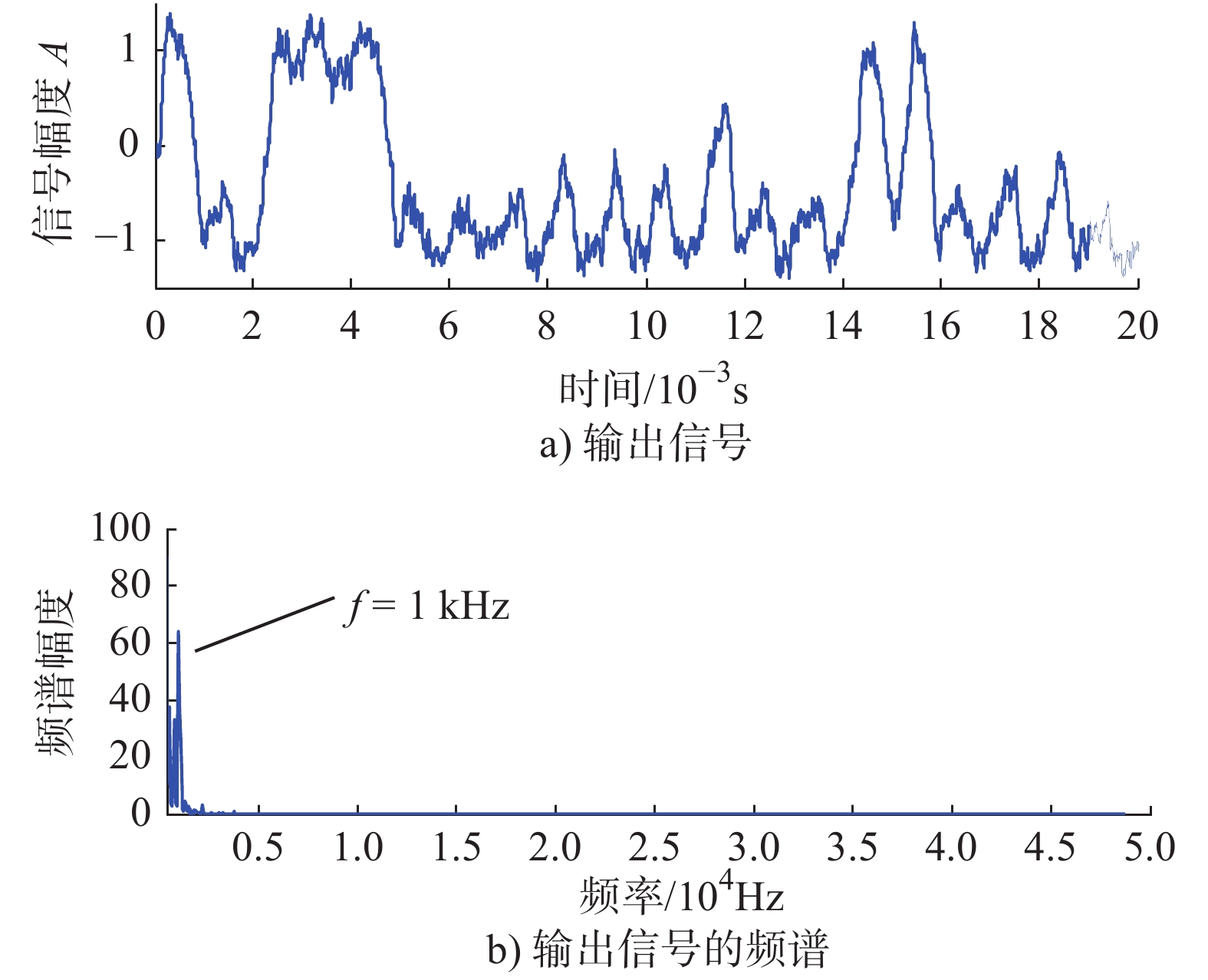
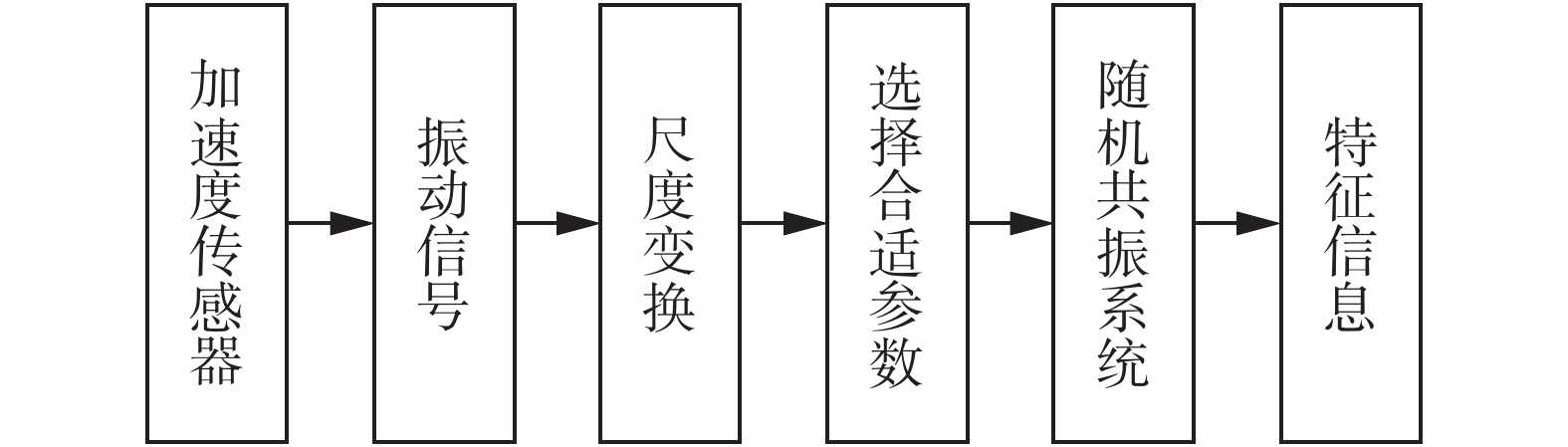
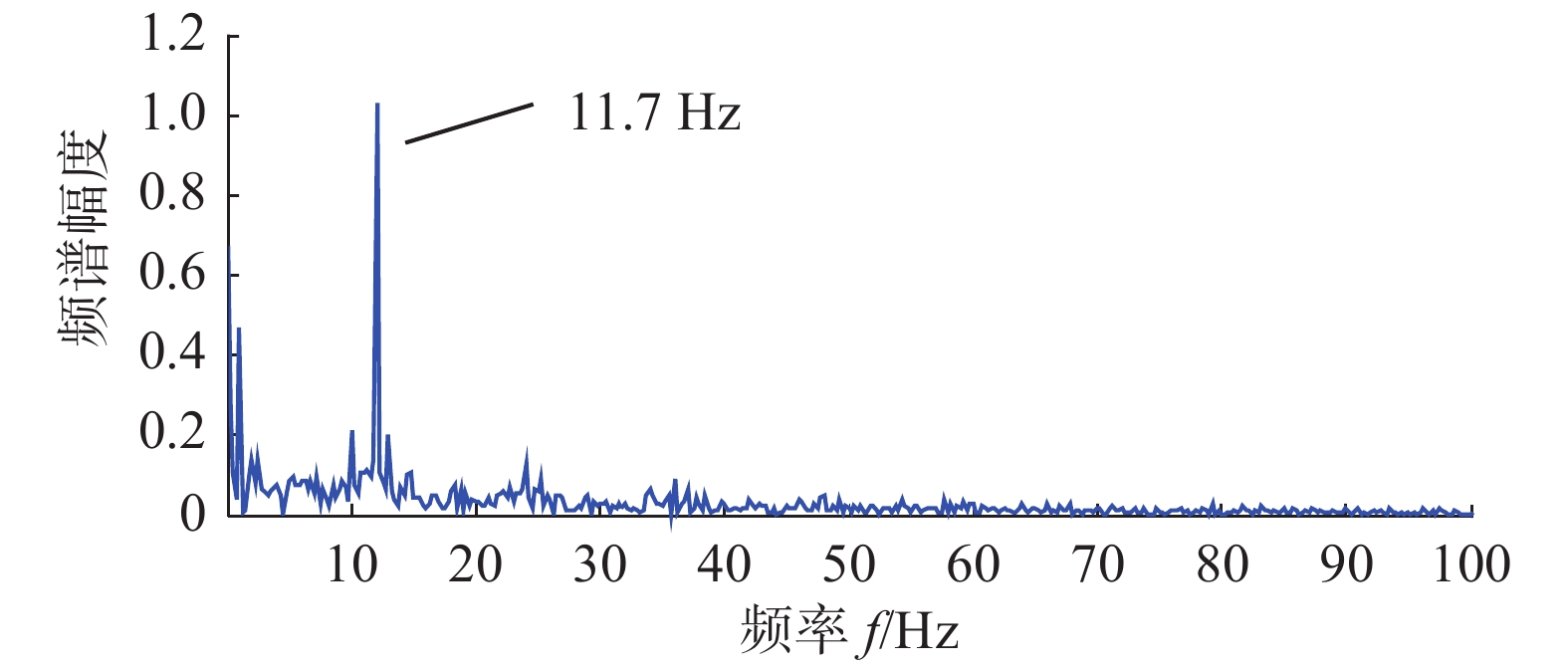
Aiming at the problem that the traditional time-frequency domain detection method can not effectively detect the weak fault feature information at the initial stage of sharp tool wear, a new method of tool condition monitoring with normalized variable-scale stochastic resonance is proposed. This method changes the model of the classical bistable stochastic resonance system into a normalized form by substitution. After the change, the stochastic resonance (SR) method amplifies the mixed signals, making the SR method suitable for large-parameter system. The feasibility of this condition monitoring method is verified by simulation. The method is used to monitor the tool in real time, tool wear information characterized by spindle fundamental frequency and end mill rotation frequency was successfully detected, which shows the practicability and effectiveness of the normalized variable-scale stochastic resonance in the tool condition monitoring.
Aiming at the problem that the traditional time-frequency domain detection method can not effectively detect the weak fault feature information at the initial stage of sharp tool wear, a new method of tool condition monitoring with normalized variable-scale stochastic resonance is proposed. This method changes the model of the classical bistable stochastic resonance system into a normalized form by substitution. After the change, the stochastic resonance (SR) method amplifies the mixed signals, making the SR method suitable for large-parameter system. The feasibility of this condition monitoring method is verified by simulation. The method is used to monitor the tool in real time, tool wear information characterized by spindle fundamental frequency and end mill rotation frequency was successfully detected, which shows the practicability and effectiveness of the normalized variable-scale stochastic resonance in the tool condition monitoring.



2020, 39(10): 1526-1533.
doi: 10.13433/j.cnki.1003-8728.20200179
Abstract:
In order to identify the application scope of impact force models in clearance joint, and more accurately describe the collision phenomenon in mechanical system, the Newton restitution coefficient is defined as evaluation index, and the joint of journal-bearing is used as example. Then a great number of numerical results are presented based on different impact force models with different coefficient of restitution. It can be concluded that the maximum value of impact force and deformation, as well as actual restitution have obvious difference for different impact forces, so the selection of impact force model should be considered comprehensively with initial collision conditions and material properties.
In order to identify the application scope of impact force models in clearance joint, and more accurately describe the collision phenomenon in mechanical system, the Newton restitution coefficient is defined as evaluation index, and the joint of journal-bearing is used as example. Then a great number of numerical results are presented based on different impact force models with different coefficient of restitution. It can be concluded that the maximum value of impact force and deformation, as well as actual restitution have obvious difference for different impact forces, so the selection of impact force model should be considered comprehensively with initial collision conditions and material properties.




2020, 39(10): 1534-1538.
doi: 10.13433/j.cnki.1003-8728.20190315
Abstract:
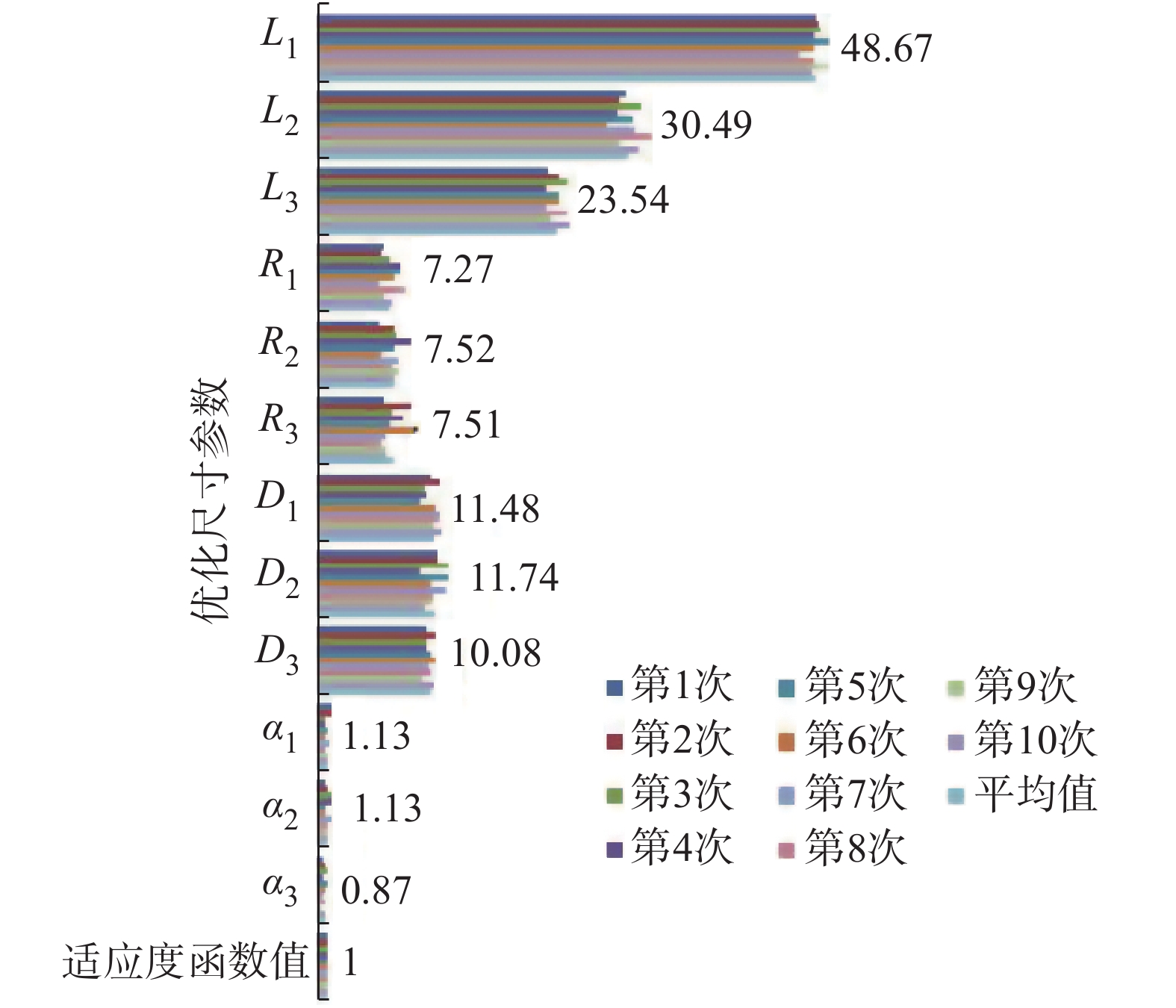
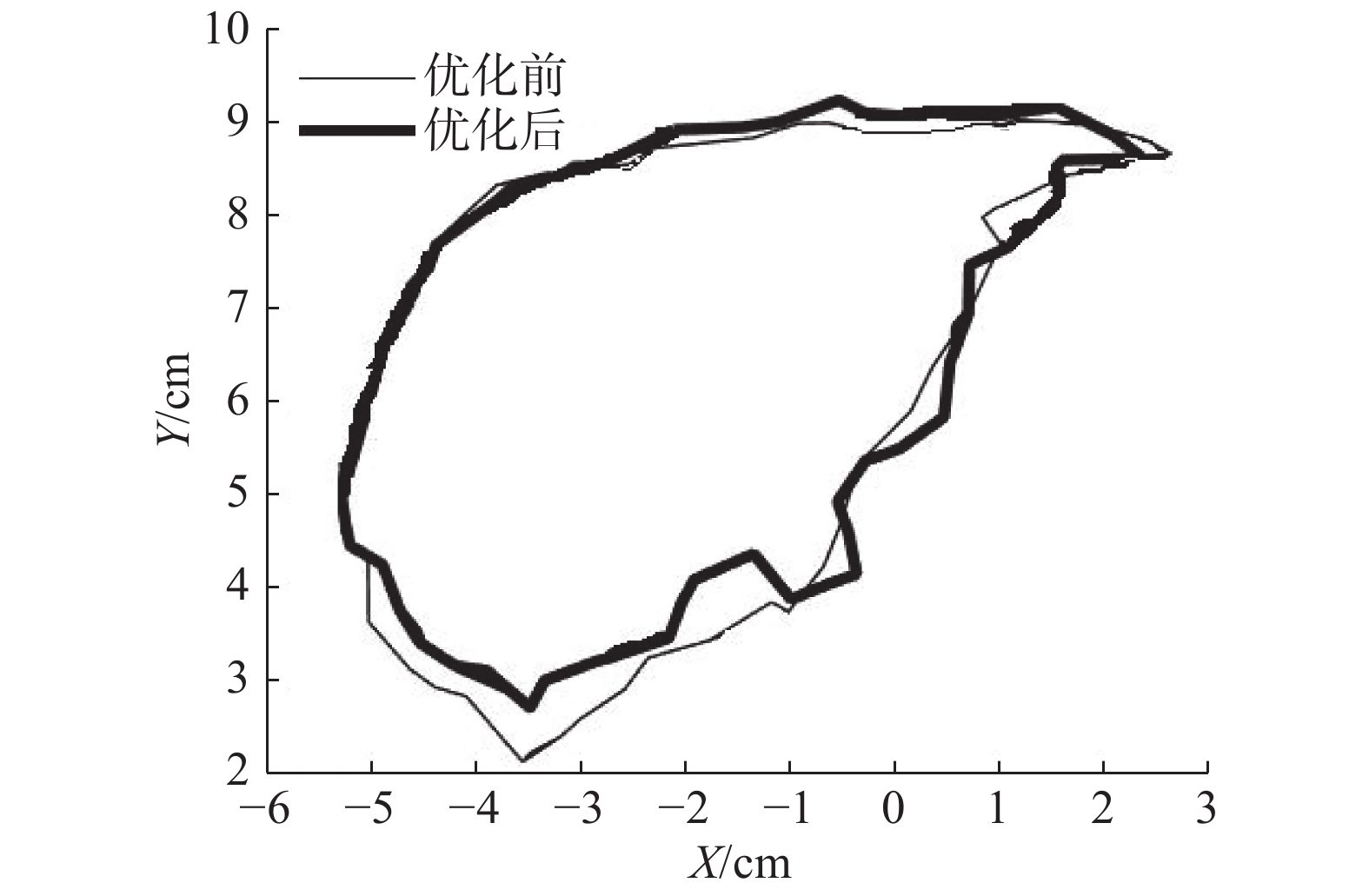
In order to make the bionic manipulator finger satisfy the designed size range under the constraints, the bionic manipulator can grasp the target object stably and accurately. Firstly, the contact force model of the bionic mechanical finger joint is established with the force and moment balance principles. Then, the objective function is established according to the grasping requirement, and a reasonable fitness function is constructed. With these functions, combined with the constraints, the size parameters of the optimized bionic mechanical finger are obtained with the genetic algorithm. Finally, the bionic mechanical finger is simulated with the MATLAB software. The simulation results show that the grasping effect of the optimized bionic manipulator is better than that of the optimized manipulator.
In order to make the bionic manipulator finger satisfy the designed size range under the constraints, the bionic manipulator can grasp the target object stably and accurately. Firstly, the contact force model of the bionic mechanical finger joint is established with the force and moment balance principles. Then, the objective function is established according to the grasping requirement, and a reasonable fitness function is constructed. With these functions, combined with the constraints, the size parameters of the optimized bionic mechanical finger are obtained with the genetic algorithm. Finally, the bionic mechanical finger is simulated with the MATLAB software. The simulation results show that the grasping effect of the optimized bionic manipulator is better than that of the optimized manipulator.





2020, 39(10): 1539-1546.
doi: 10.13433/j.cnki.1003-8728.20190294
Abstract:
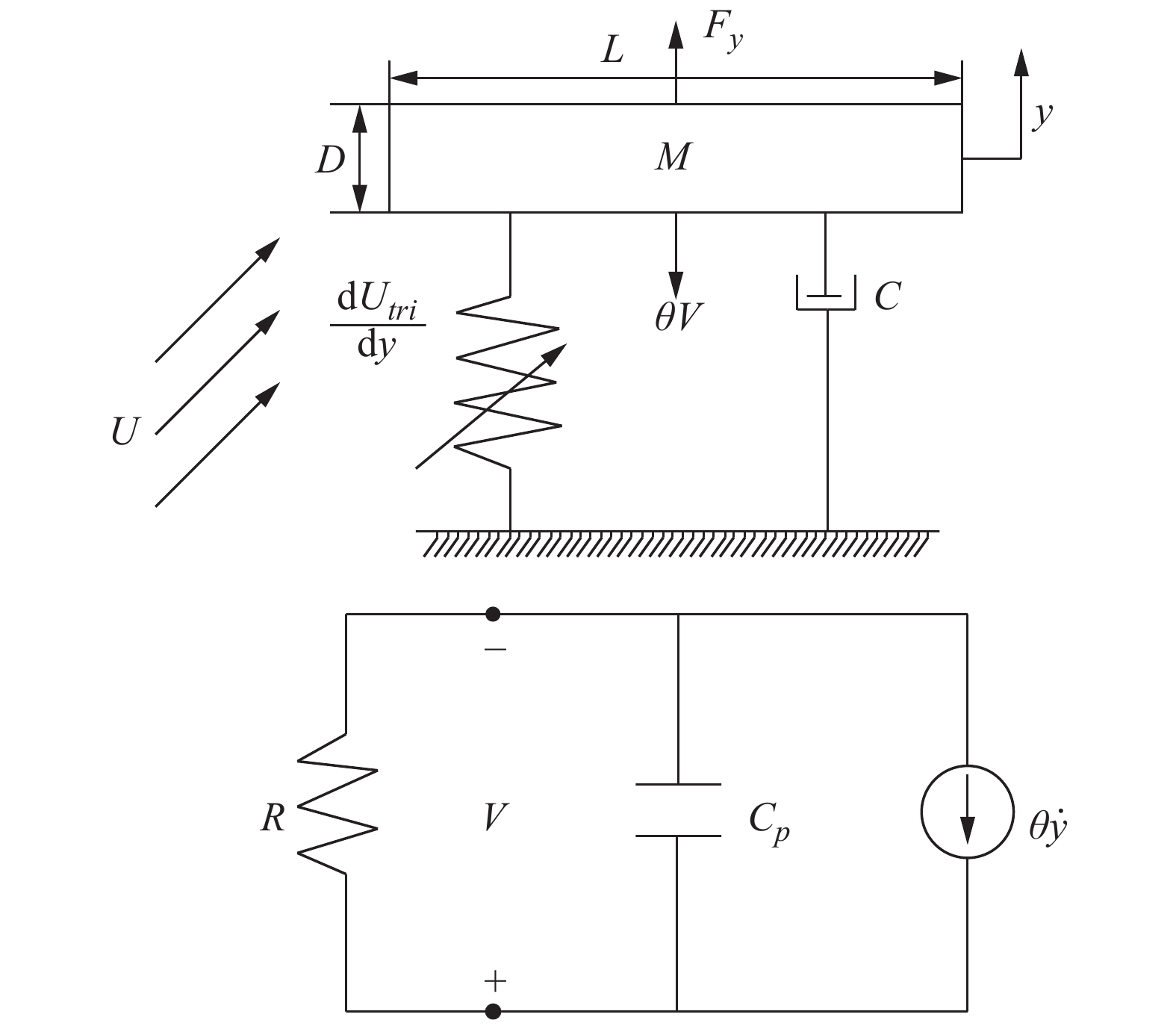
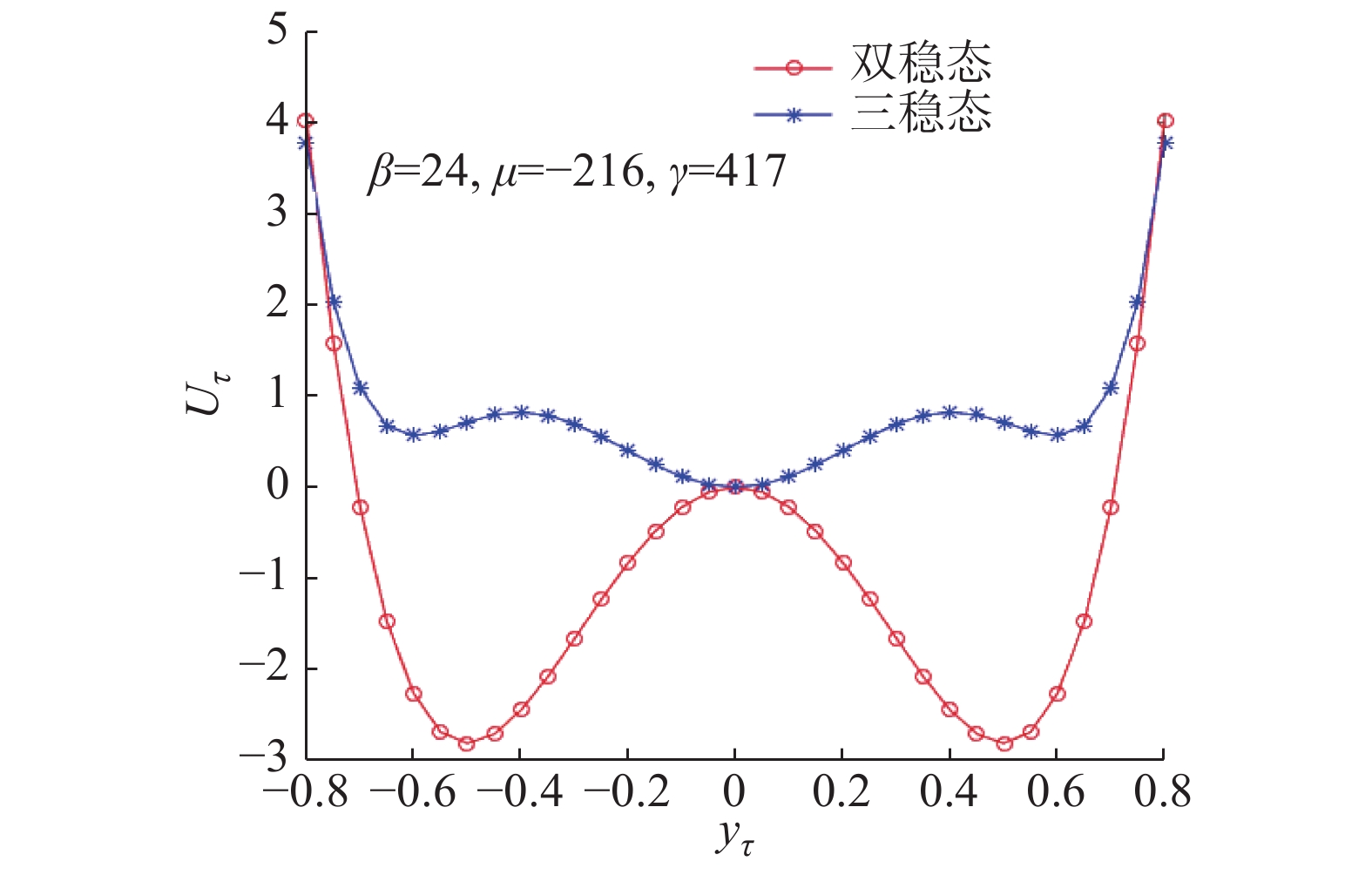
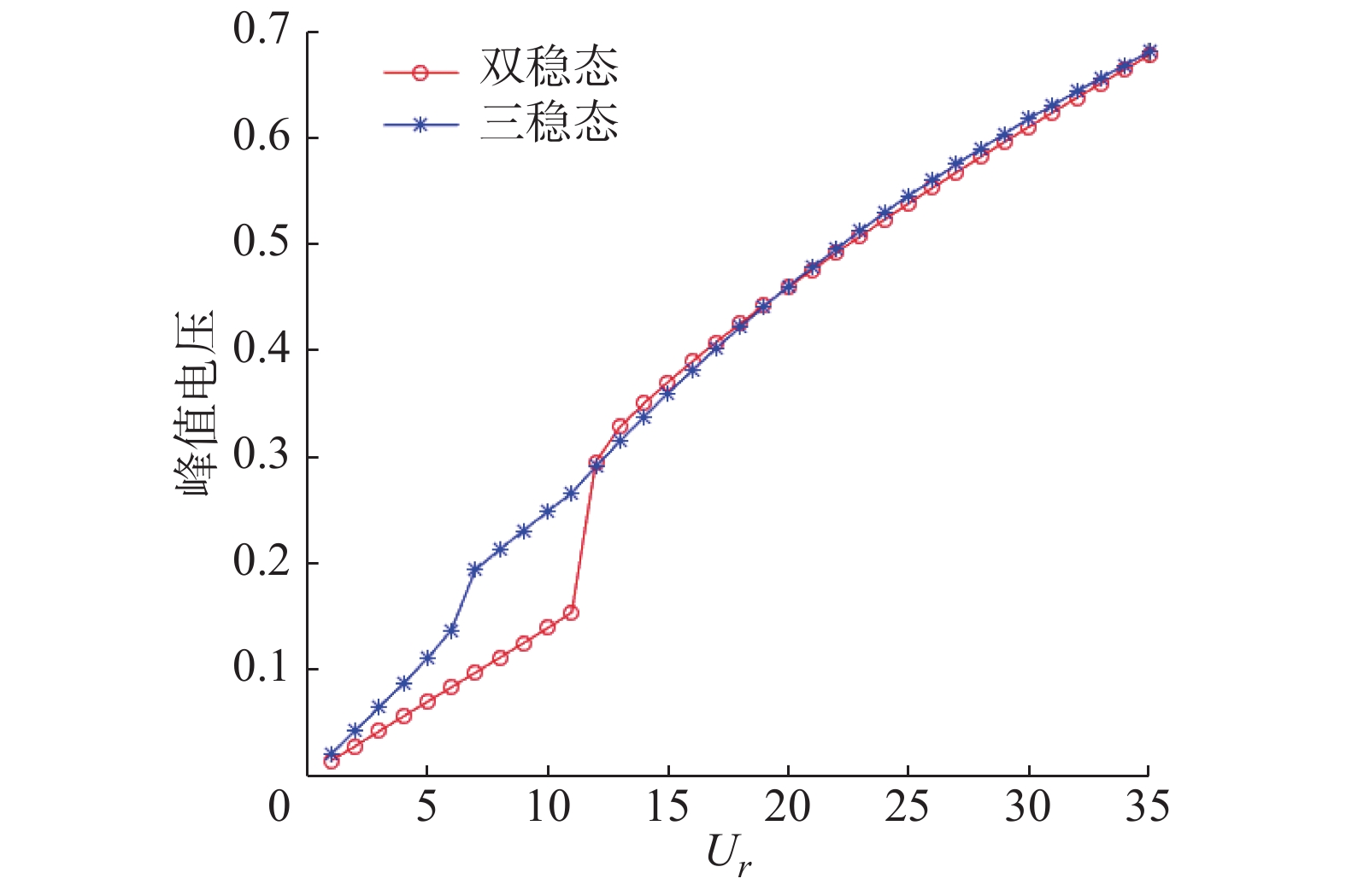
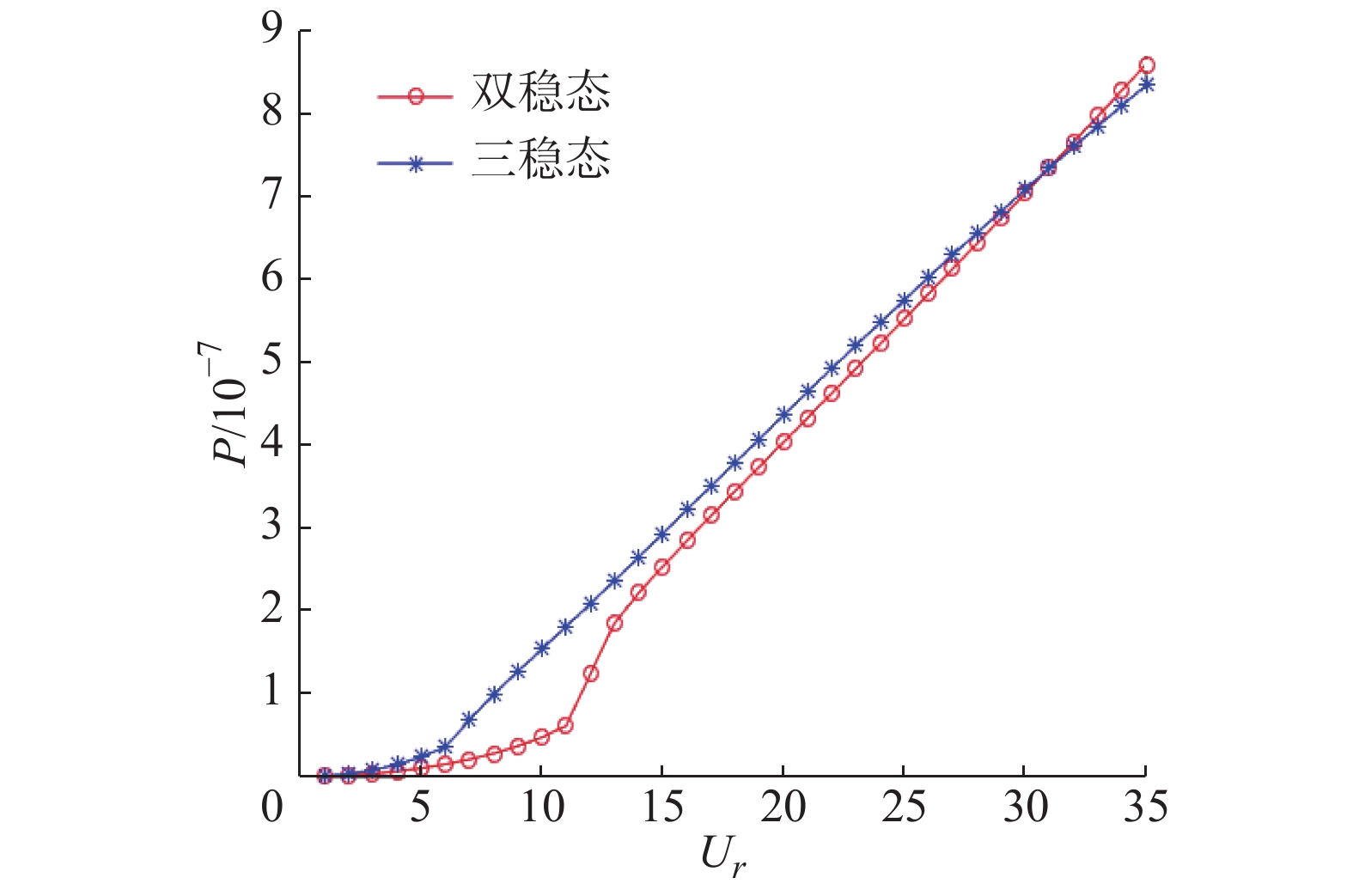
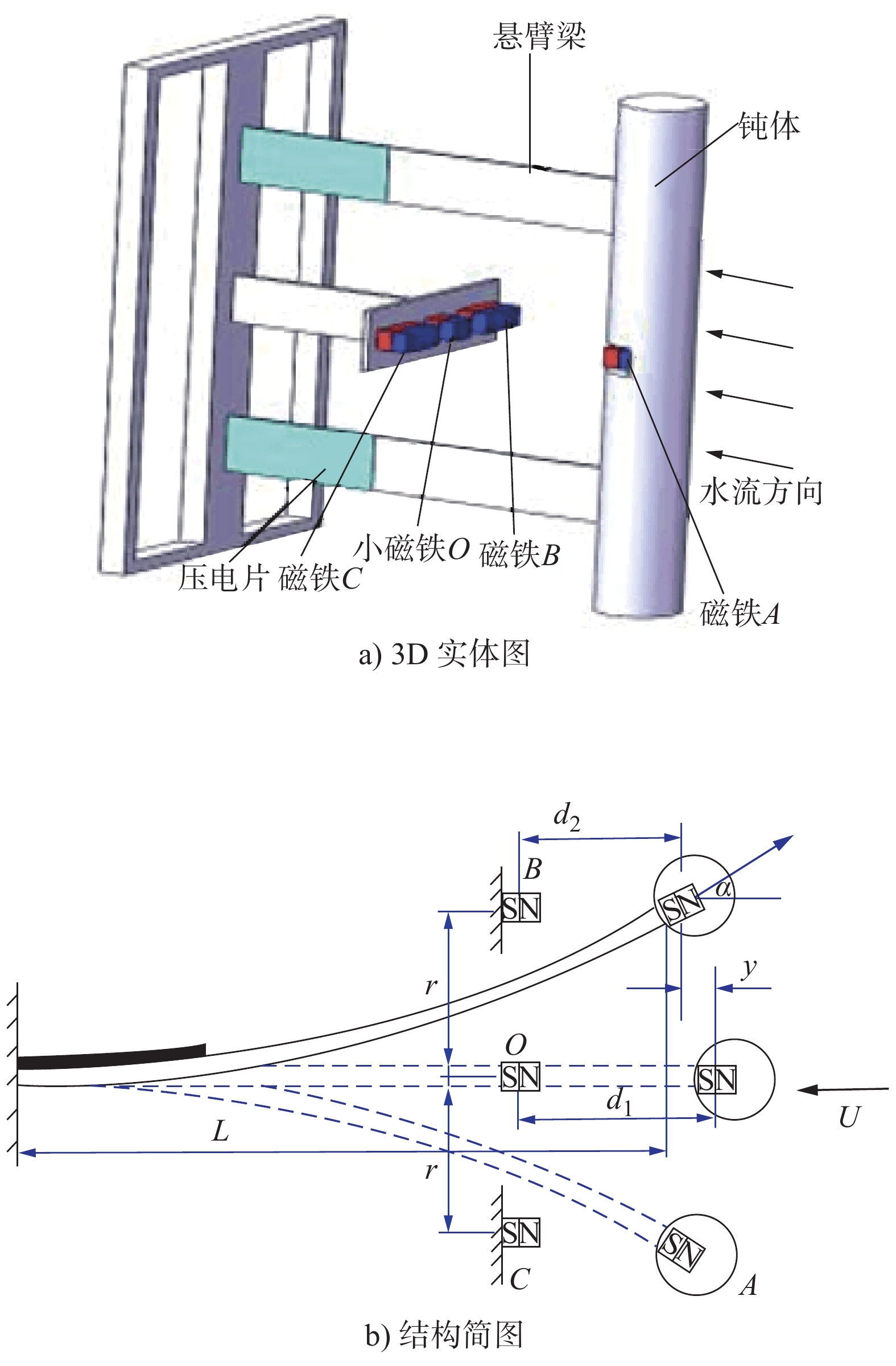
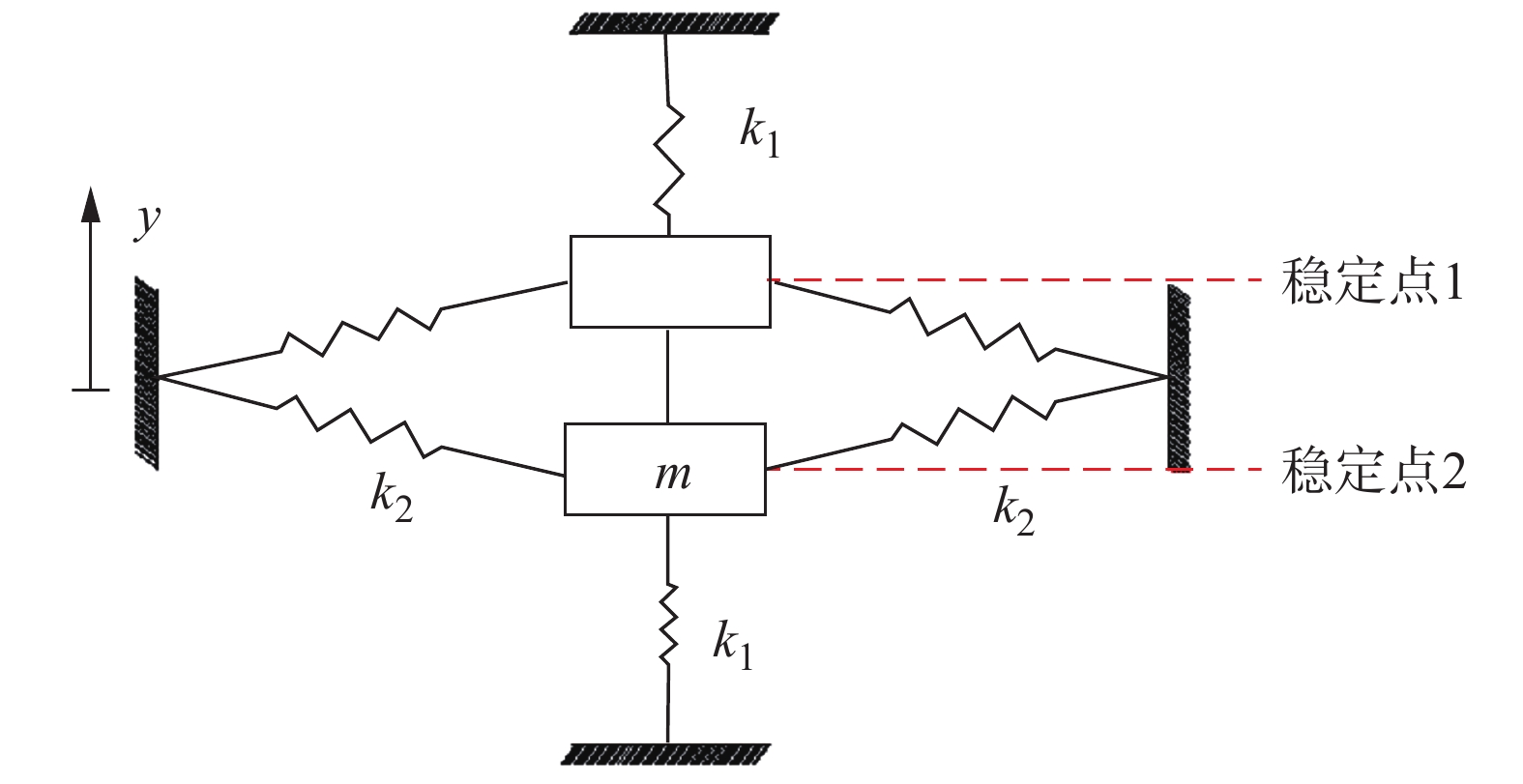
Advances in MEMS technology have greatly reduced the power consumption of asensor, whichcan be self-powered with environmental energy. In this paper, a three-stable vibration mode is introduced into the galloping vibrationenergy trap. A tri-stable cantilever beam piezoelectric vibration energy harvester is proposed. The mechanical model and dynamic equation are established. The bi-stability is studied by numerical simulation. The dynamic characteristics and power generation performance of the static and tri-stable motion-stimulus systems are analyzed. The tri-stable system is more likely to undergo large motion and better power generation performance at lower flow rates. The influence of parameters of the tri-stable system on the power generation performance of the galloping energy trap is further studied.
Advances in MEMS technology have greatly reduced the power consumption of asensor, whichcan be self-powered with environmental energy. In this paper, a three-stable vibration mode is introduced into the galloping vibrationenergy trap. A tri-stable cantilever beam piezoelectric vibration energy harvester is proposed. The mechanical model and dynamic equation are established. The bi-stability is studied by numerical simulation. The dynamic characteristics and power generation performance of the static and tri-stable motion-stimulus systems are analyzed. The tri-stable system is more likely to undergo large motion and better power generation performance at lower flow rates. The influence of parameters of the tri-stable system on the power generation performance of the galloping energy trap is further studied.








2020, 39(10): 1547-1554.
doi: 10.13433/j.cnki.1003-8728.20190340
Abstract:
A dexterous attitude transformation of workpiece in space can be realized by co-rotating two robots around the center point. A quaternion path arc interpolation method is proposed, and applied to coordinate rotation and coordinate position interpolation of path control points. Firstly, the initial control points of the path arc are expressed as four-dimensional homogeneous transformation matrix, and the three-dimensional rotation matrix and coordinate vector are extracted. Then, the rotation matrix is transformed into quaternion for coordinate rotation interpolation, and the coordinate vector of the control point is interpolated to solve the general solution of the homogeneous transformation matrix of the proposed method. Finally, the joint coordinate system of the interpolation control point is obtained by inverse kinematics, then imported into the robot instructor, and the co-rotation of the two robots is experimented. Analysis and experimental show that the interpolation control points of the path arc trajectory can be calculated by the proposed method. The interpolation path is smooth, the joint angle limitation is fulfilled, and the roundness error is controlled within 1.1 mm. This proposed method can realize the coordinated movement of workpiece by two robots in space with multi-angle rotation to the center, and has good performance of universal applicability.
A dexterous attitude transformation of workpiece in space can be realized by co-rotating two robots around the center point. A quaternion path arc interpolation method is proposed, and applied to coordinate rotation and coordinate position interpolation of path control points. Firstly, the initial control points of the path arc are expressed as four-dimensional homogeneous transformation matrix, and the three-dimensional rotation matrix and coordinate vector are extracted. Then, the rotation matrix is transformed into quaternion for coordinate rotation interpolation, and the coordinate vector of the control point is interpolated to solve the general solution of the homogeneous transformation matrix of the proposed method. Finally, the joint coordinate system of the interpolation control point is obtained by inverse kinematics, then imported into the robot instructor, and the co-rotation of the two robots is experimented. Analysis and experimental show that the interpolation control points of the path arc trajectory can be calculated by the proposed method. The interpolation path is smooth, the joint angle limitation is fulfilled, and the roundness error is controlled within 1.1 mm. This proposed method can realize the coordinated movement of workpiece by two robots in space with multi-angle rotation to the center, and has good performance of universal applicability.












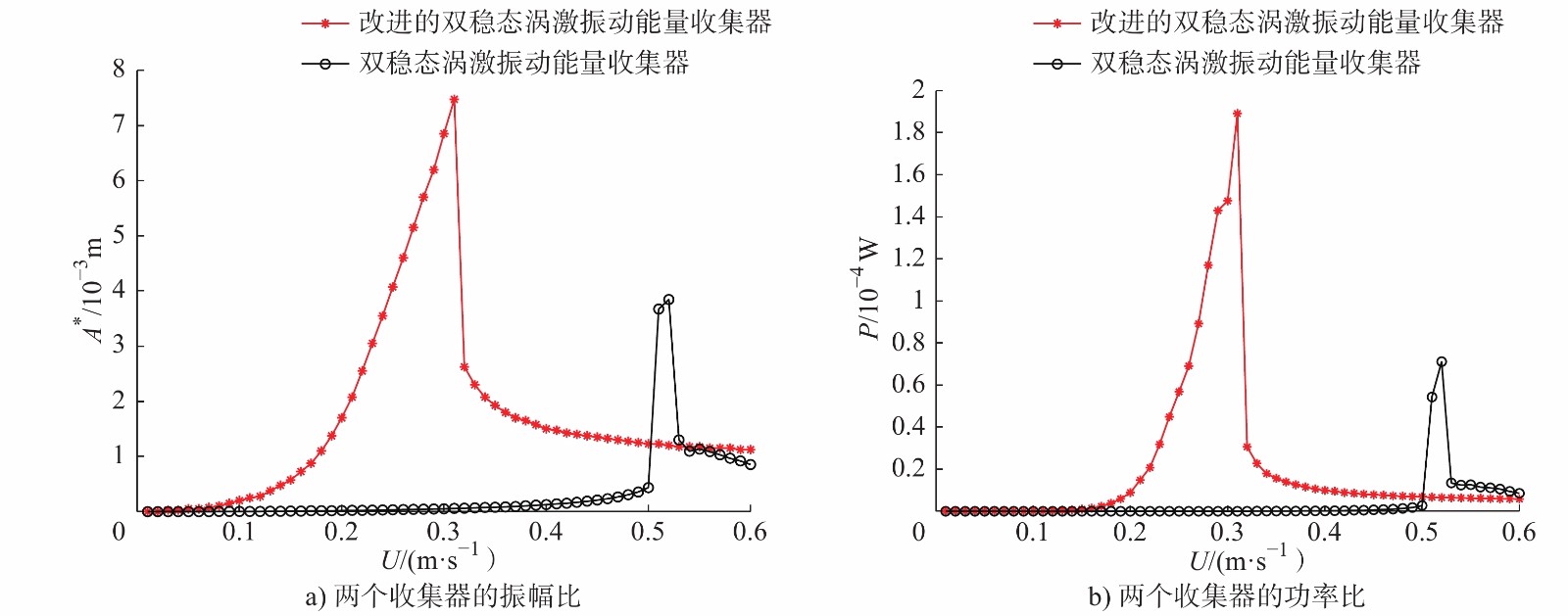
Study on Power Generation Performance of Improved Bistable Vortex-induced Vibration Energy Harvester
2020, 39(10): 1555-1562.
doi: 10.13433/j.cnki.1003-8728.20190274
Abstract:
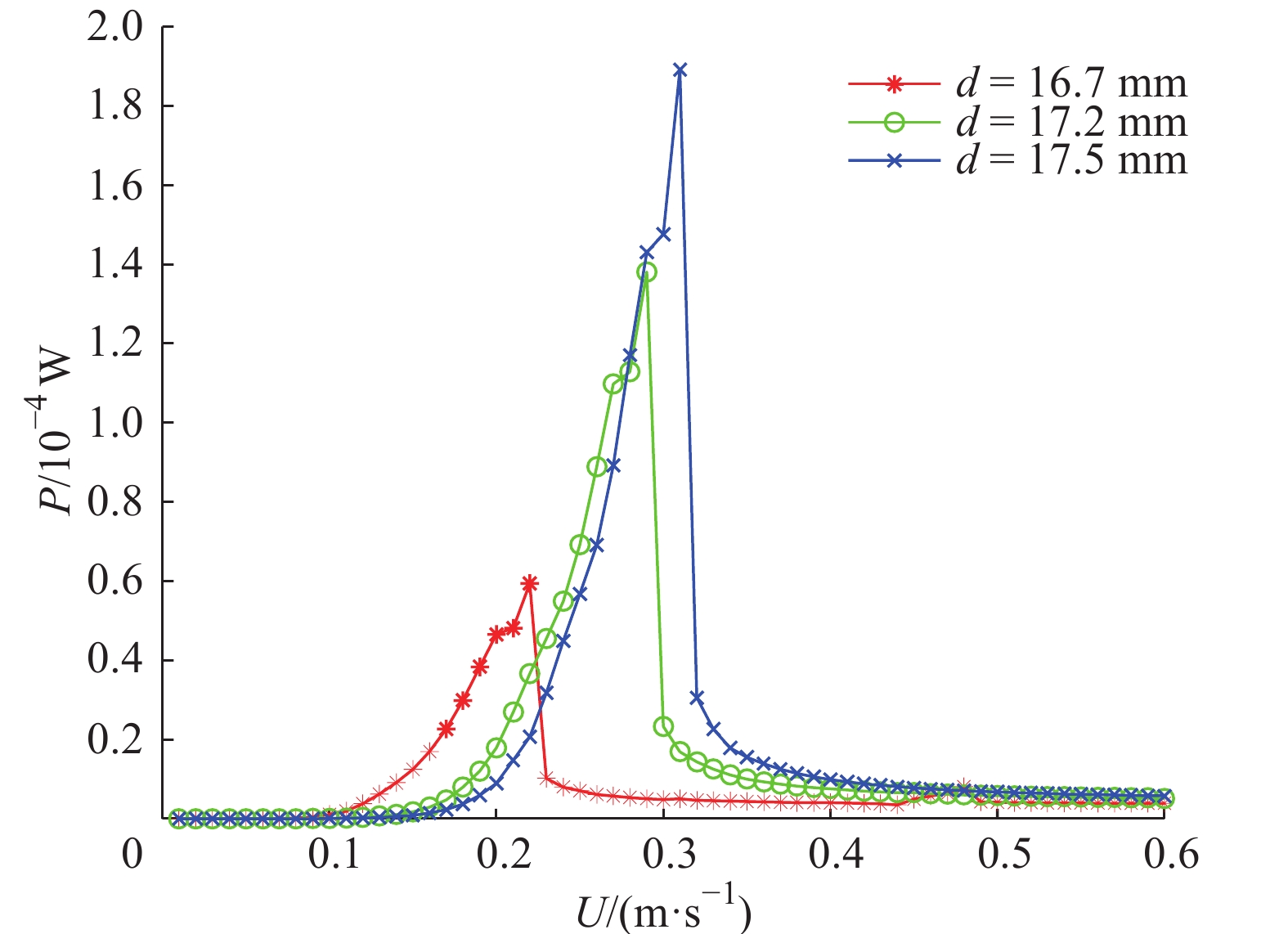
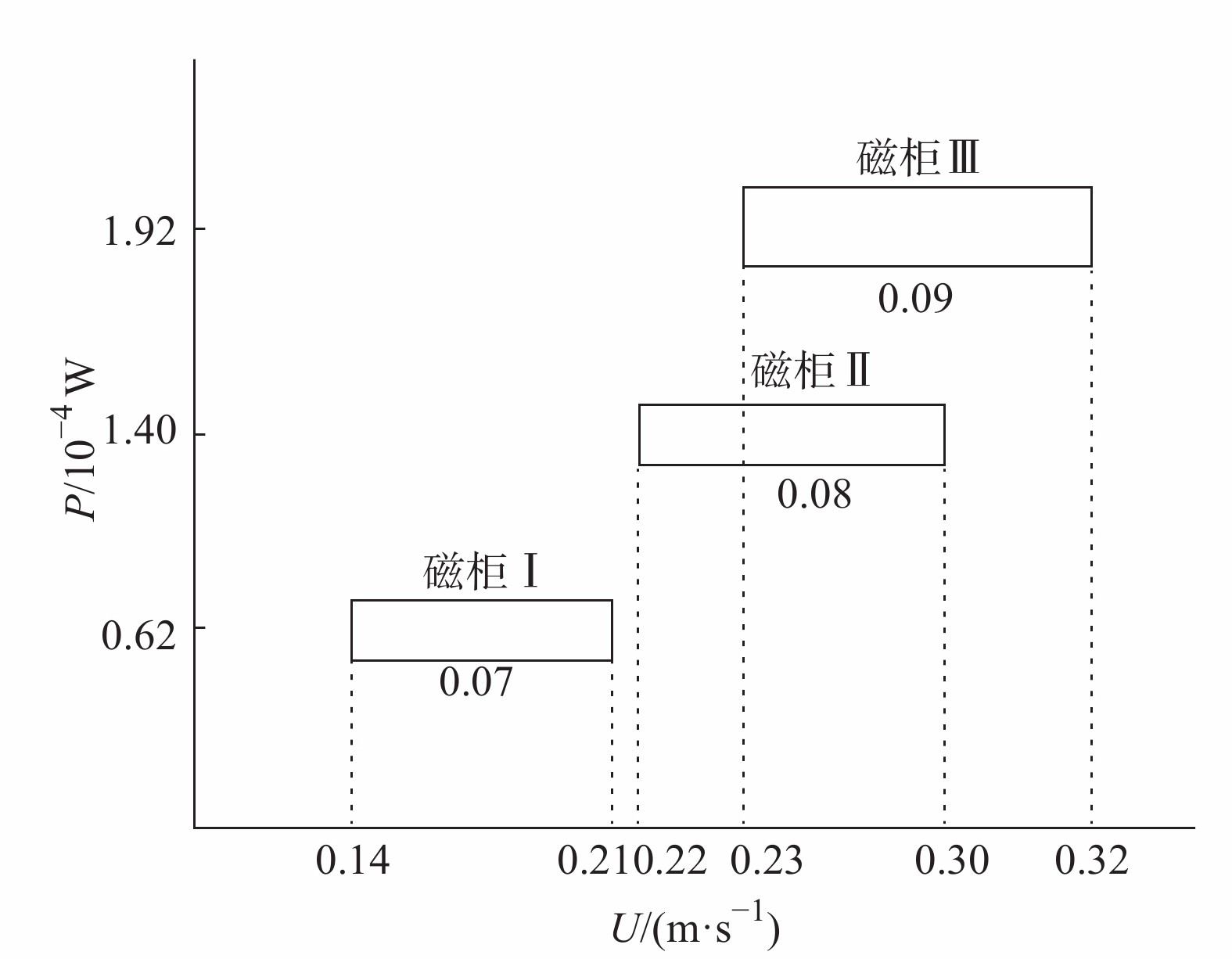
With the advent of low-power sensors, the use of flow-induced vibration to provide self-powered sensors is a hot spot in research environmental monitoring. In this paper, the improved nonlinear restoring force is combined with vortex-induced vibration, and an improved bistable vortex-induced vibration energy harvester is proposed. The mechanical model and governing equation are established. The improved bistable vortex-induced vibration energy harvesting is obtained by numerical simulation. In terms of energy collection, the device is superior to the bistable vortex-induced vibration energy harvester. The influence of magnetic distance on the potential energy function and power generation of the energy harvesting system is studied and analyzed. The half-power bandwidth method is used to determine the system under different magnetic distances. Working bandwidth, the influence of magnetic distance on power generation and working bandwidth is analyzed.
With the advent of low-power sensors, the use of flow-induced vibration to provide self-powered sensors is a hot spot in research environmental monitoring. In this paper, the improved nonlinear restoring force is combined with vortex-induced vibration, and an improved bistable vortex-induced vibration energy harvester is proposed. The mechanical model and governing equation are established. The improved bistable vortex-induced vibration energy harvesting is obtained by numerical simulation. In terms of energy collection, the device is superior to the bistable vortex-induced vibration energy harvester. The influence of magnetic distance on the potential energy function and power generation of the energy harvesting system is studied and analyzed. The half-power bandwidth method is used to determine the system under different magnetic distances. Working bandwidth, the influence of magnetic distance on power generation and working bandwidth is analyzed.






2020, 39(10): 1563-1567.
doi: 10.13433/j.cnki.1003-8728.20190308
Abstract:
Aiming at the shortcomings of many existing contour error estimation methods, such as complex model, large computational complexity and difficult real-time estimation and compensation, a contour error estimation method based on circular approximation and coordinate transformation is proposed. It is mainly to simplify the calculation process and reduce thecalculation amount by transforming the two target coordinate systems, which can be applied to the environment for estimating the contour error in real time. To verify the effectiveness of this algorithm, the pre-compensation simulation of the contour error was performed in the Simulink environment.The simulation results show that the algorithm can estimate and compensate the contour error in real time, and the estimation accuracy is high, the compensation process is stable, and the machining accuracy of the CNC machine tool can be greatly improved.
Aiming at the shortcomings of many existing contour error estimation methods, such as complex model, large computational complexity and difficult real-time estimation and compensation, a contour error estimation method based on circular approximation and coordinate transformation is proposed. It is mainly to simplify the calculation process and reduce thecalculation amount by transforming the two target coordinate systems, which can be applied to the environment for estimating the contour error in real time. To verify the effectiveness of this algorithm, the pre-compensation simulation of the contour error was performed in the Simulink environment.The simulation results show that the algorithm can estimate and compensate the contour error in real time, and the estimation accuracy is high, the compensation process is stable, and the machining accuracy of the CNC machine tool can be greatly improved.






2020, 39(10): 1568-1574.
doi: 10.13433/j.cnki.1003-8728.20190305
Abstract:
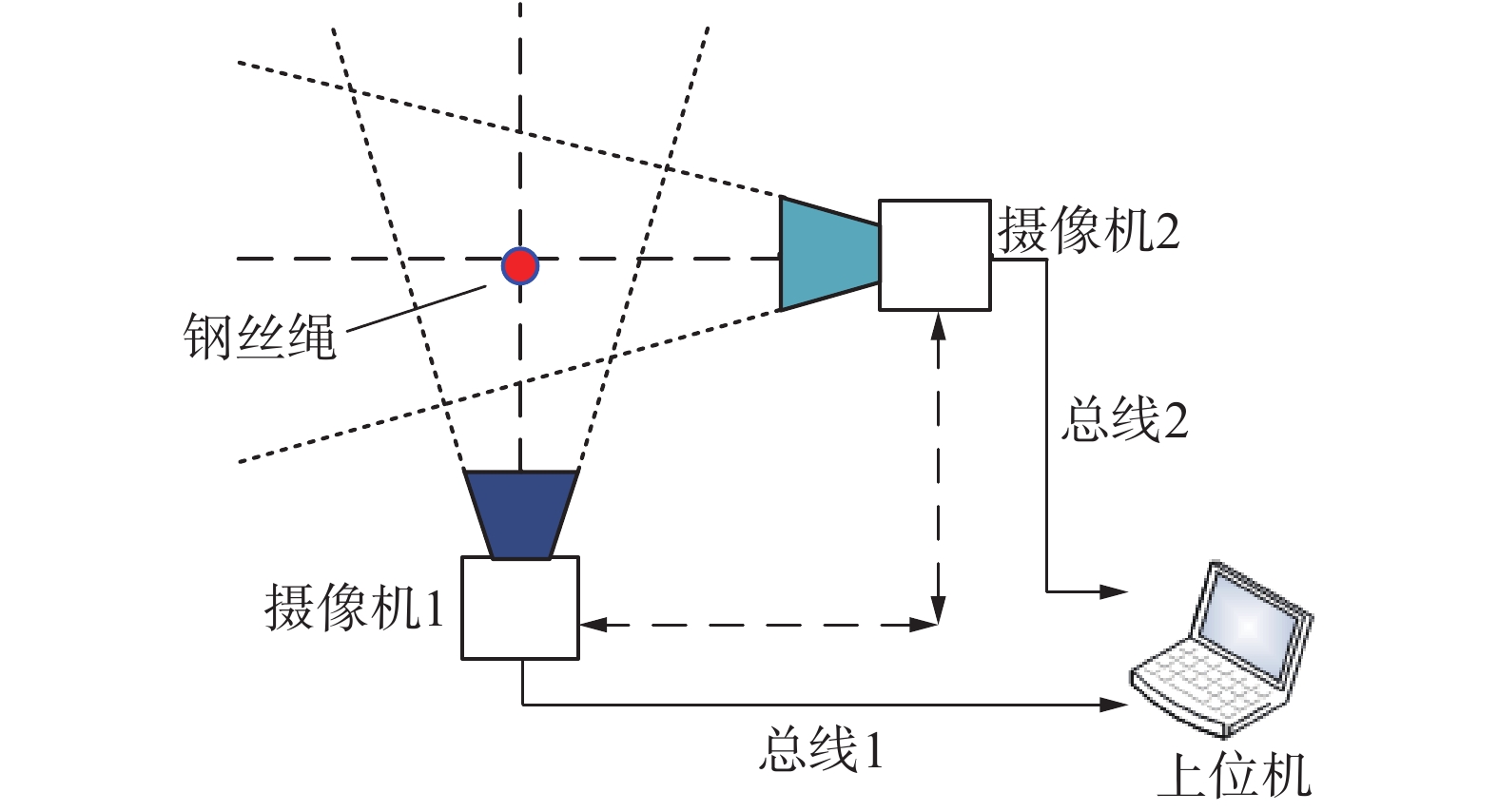
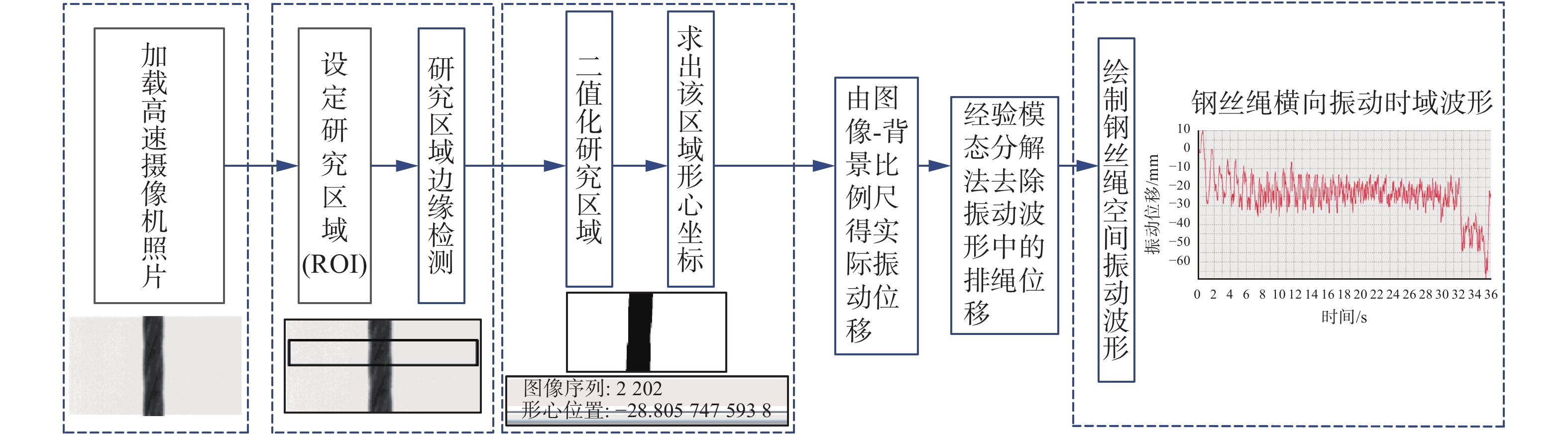
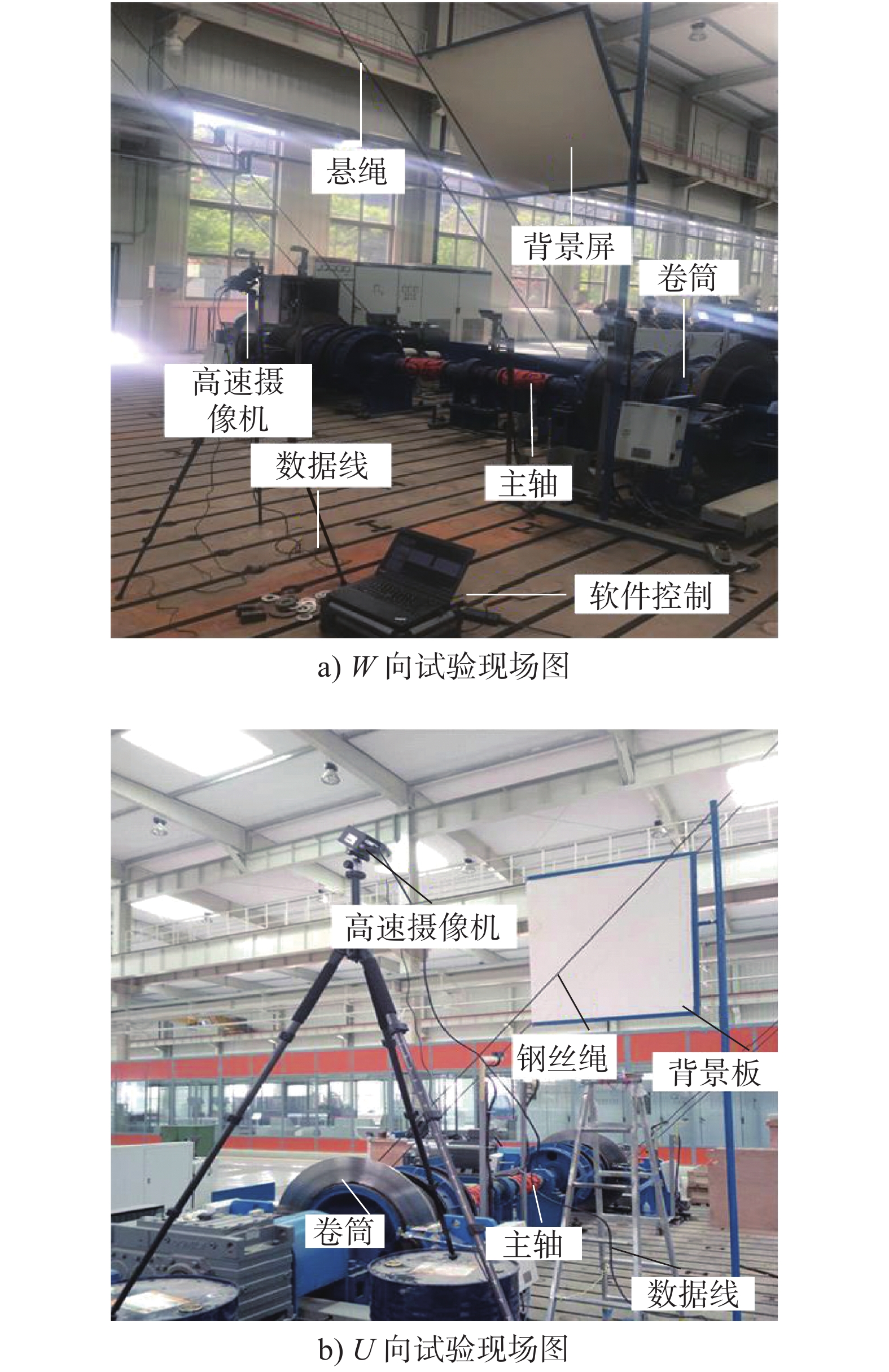
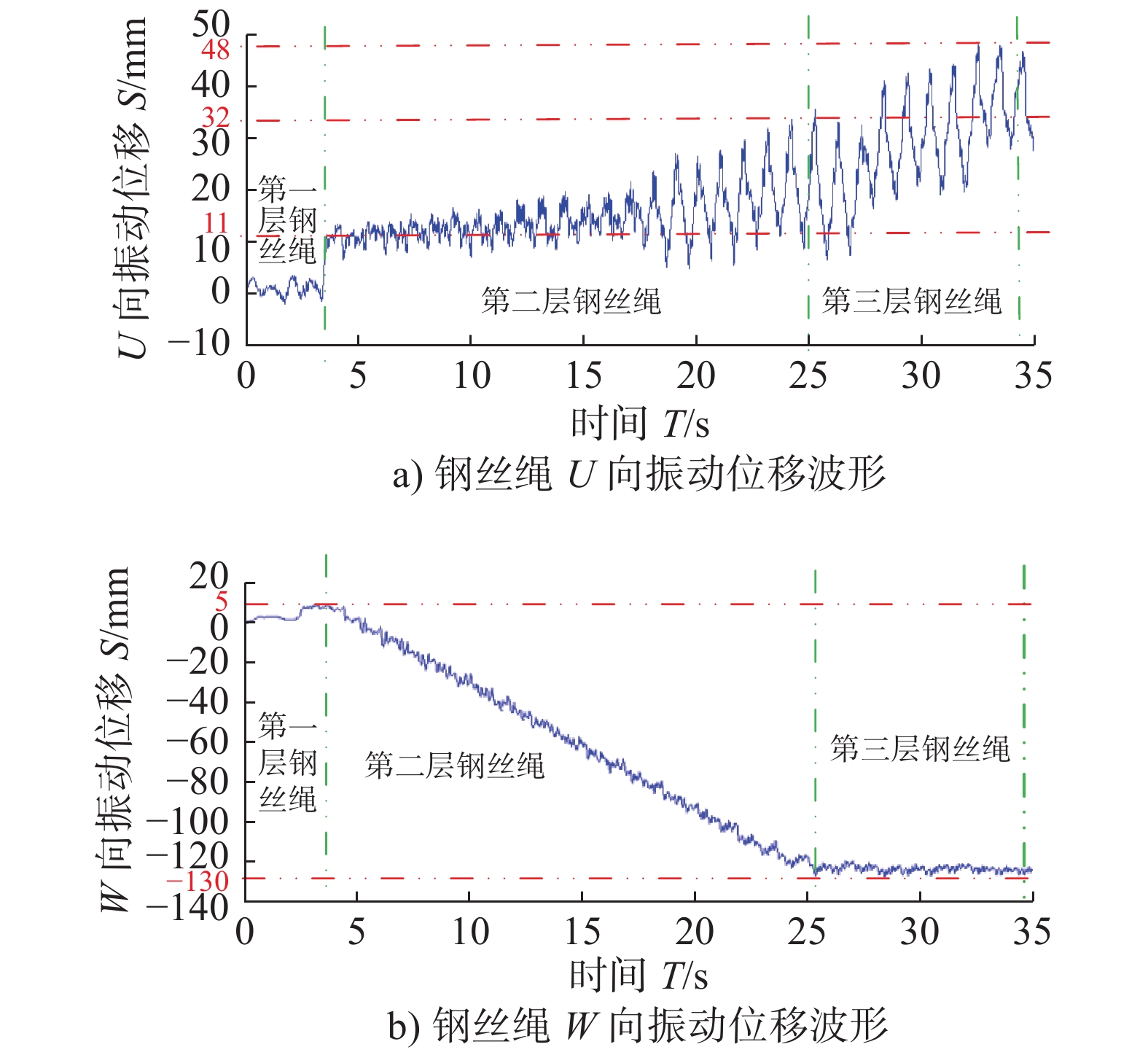
The method of measuring the transverse spatial vibration of wire rope in catenary section of winding hoist is studied, the gray image of that is captured by two high-speed cameras, on the basis of setting region of interest, a wavelet edge extraction algorithm based on adaptive threshold is adopted to improve detection accuracy of wire rope contour and then binarization is conducted, centroid position of rope is obtained by calculating matrix, the empirical mode decomposition method is used to remove the periodic excitation which is caused by the displacement of the wire rope, and then getting the transverse spatial vibration signal of the catenary. In order to verify the correctness of the measurement method, the experimental research is tested on the test platform of multi-rope winding hoisting system. Test results show that the proposed visual measurement method of rope vibration can quickly and accurately realize the non-contact measurement of the transverse spatial vibration signal of the wire rope.
The method of measuring the transverse spatial vibration of wire rope in catenary section of winding hoist is studied, the gray image of that is captured by two high-speed cameras, on the basis of setting region of interest, a wavelet edge extraction algorithm based on adaptive threshold is adopted to improve detection accuracy of wire rope contour and then binarization is conducted, centroid position of rope is obtained by calculating matrix, the empirical mode decomposition method is used to remove the periodic excitation which is caused by the displacement of the wire rope, and then getting the transverse spatial vibration signal of the catenary. In order to verify the correctness of the measurement method, the experimental research is tested on the test platform of multi-rope winding hoisting system. Test results show that the proposed visual measurement method of rope vibration can quickly and accurately realize the non-contact measurement of the transverse spatial vibration signal of the wire rope.






2020, 39(10): 1575-1579.
doi: 10.13433/j.cnki.1003-8728.20190300
Abstract:
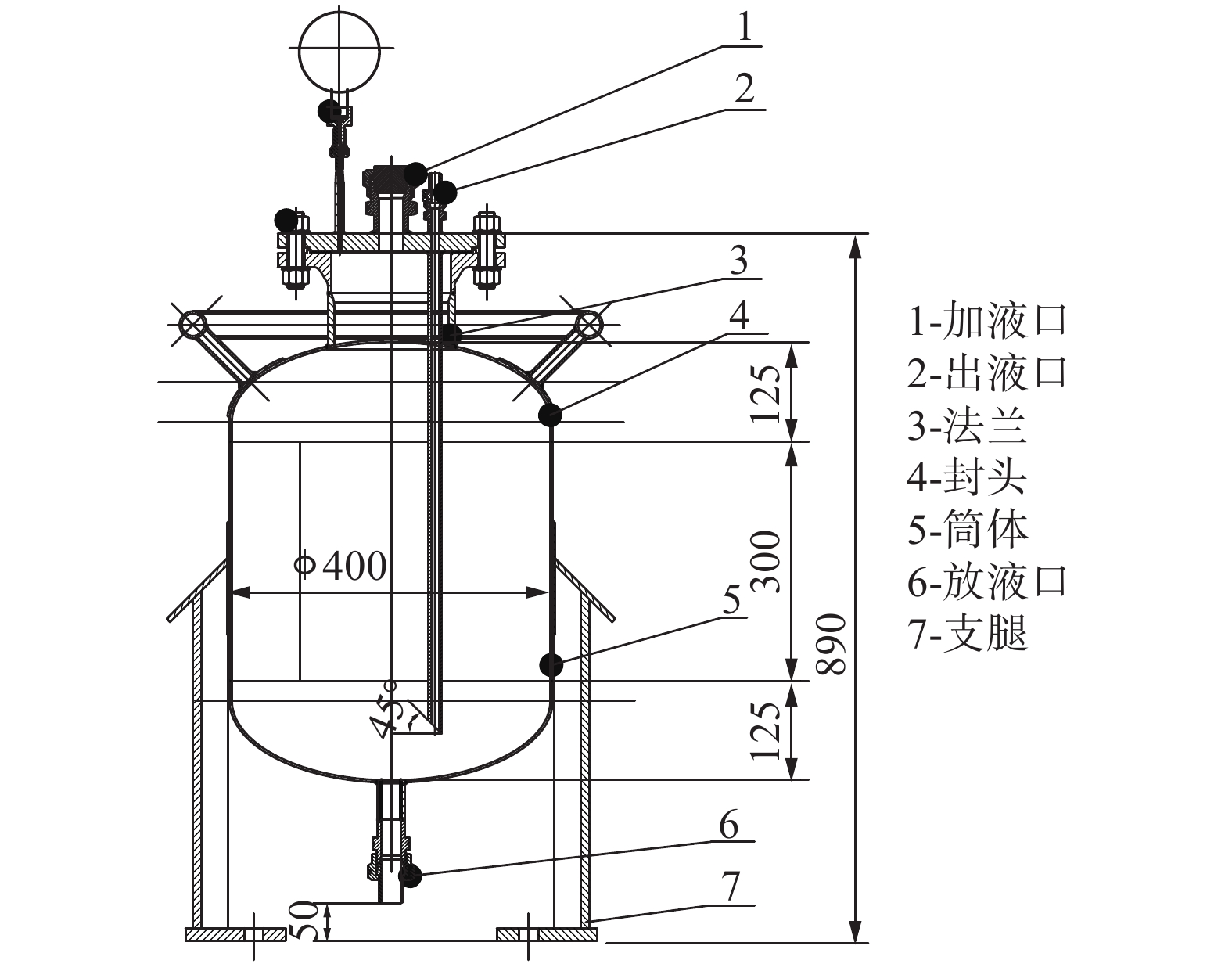
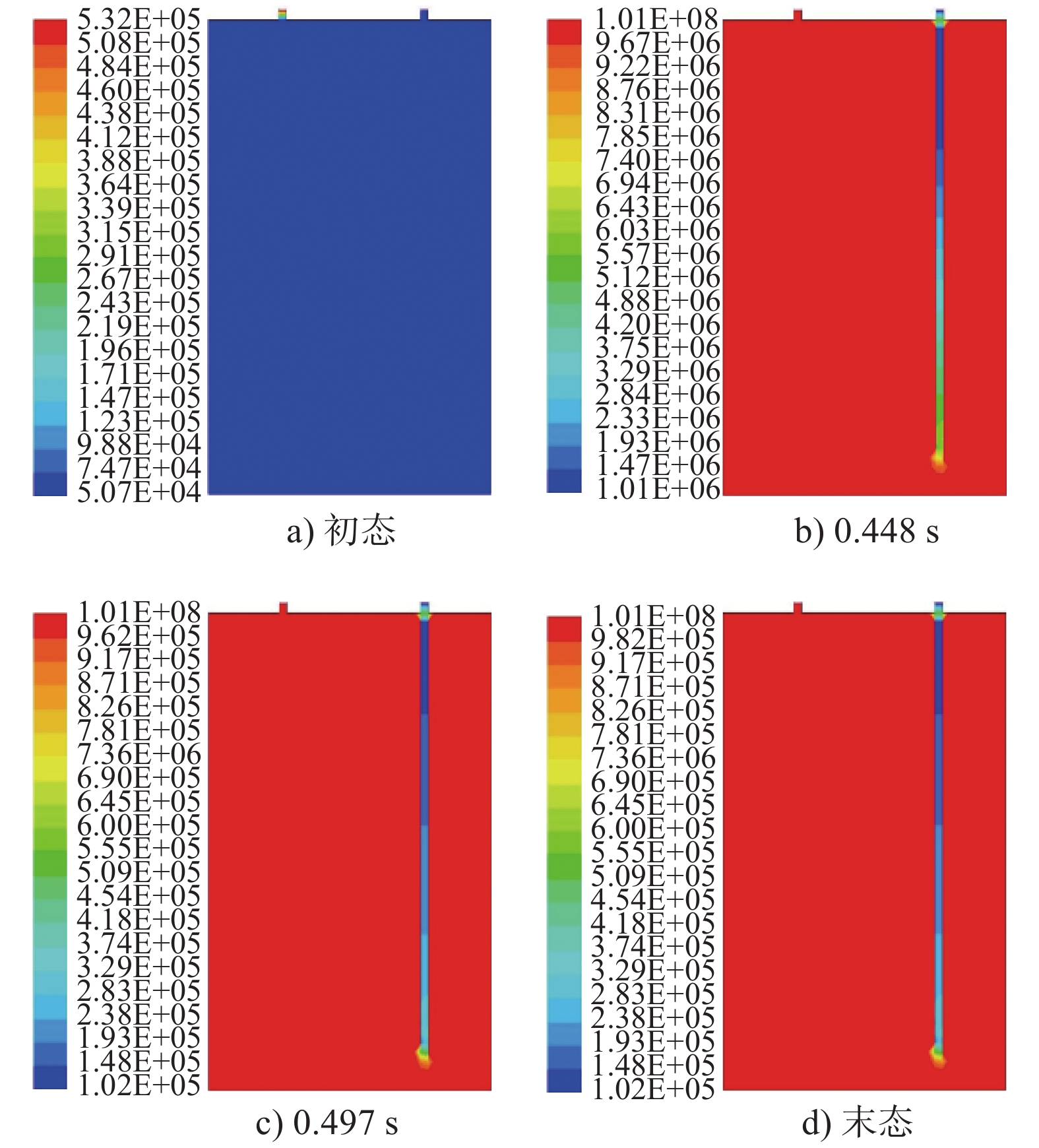
A 60 L cleaning vessel for rocket engine was designed according to the common cleaning methods of rocket engine at present. And the volume, shape size, strength, hole reinforcement, leg check, the cleaning vessel werecalculatedto complete the structural design. Furthermore, according to the Fluent numerical analysis, the internal flow fields of the cleaning vessel were simulated. And visualized pressure and velocity field nephograms of the whole process were obtained. At the same time, the VOF model in the multi-flow model was used to simulate the gas-liquid interface in the whole vessel. The simulation results showed that the numerical simulation were in a good agreement with the expected results of the design requirements, which indicated that the design was feasible.
A 60 L cleaning vessel for rocket engine was designed according to the common cleaning methods of rocket engine at present. And the volume, shape size, strength, hole reinforcement, leg check, the cleaning vessel werecalculatedto complete the structural design. Furthermore, according to the Fluent numerical analysis, the internal flow fields of the cleaning vessel were simulated. And visualized pressure and velocity field nephograms of the whole process were obtained. At the same time, the VOF model in the multi-flow model was used to simulate the gas-liquid interface in the whole vessel. The simulation results showed that the numerical simulation were in a good agreement with the expected results of the design requirements, which indicated that the design was feasible.



2020, 39(10): 1580-1586.
doi: 10.13433/j.cnki.1003-8728.20190306
Abstract:
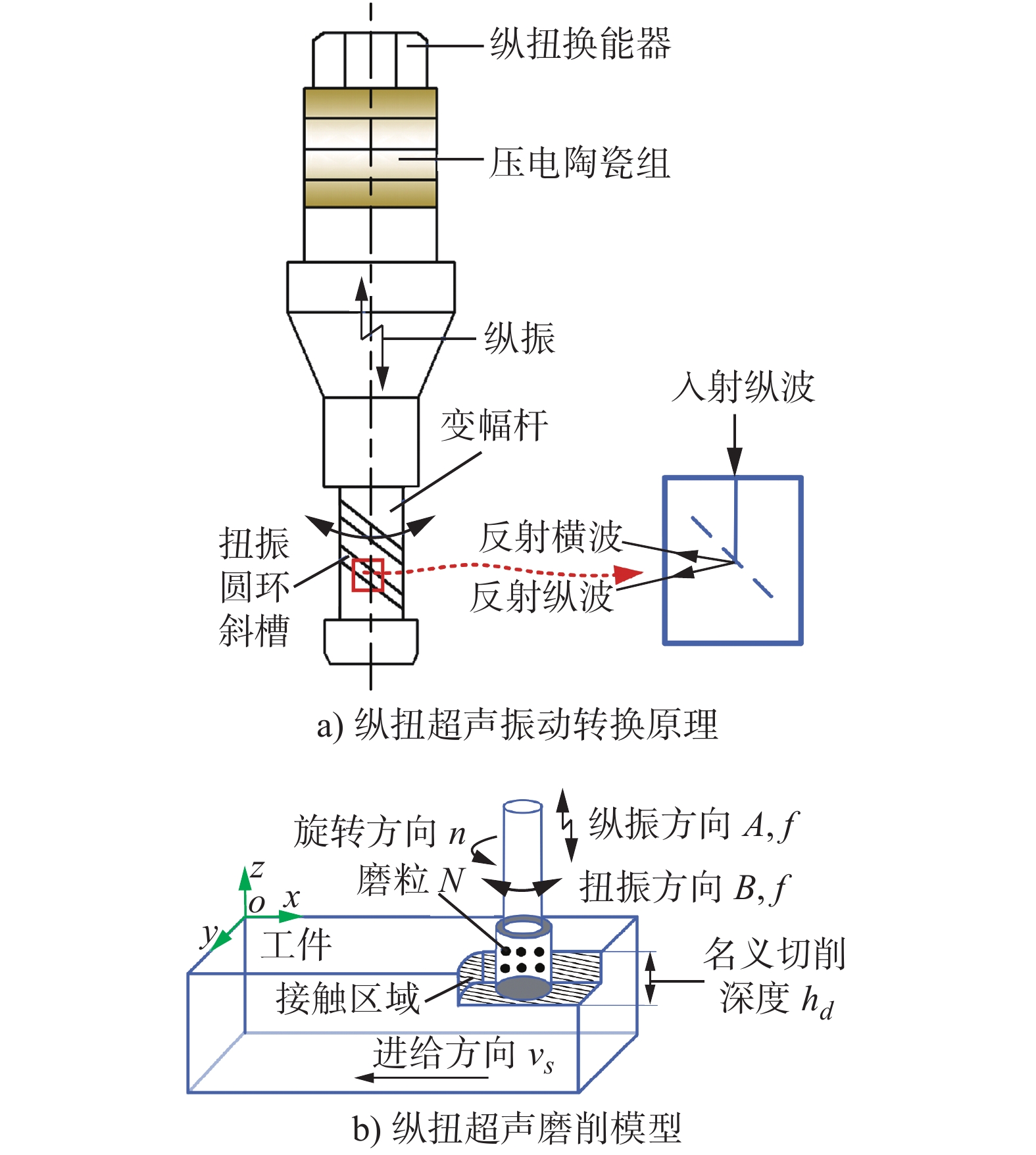
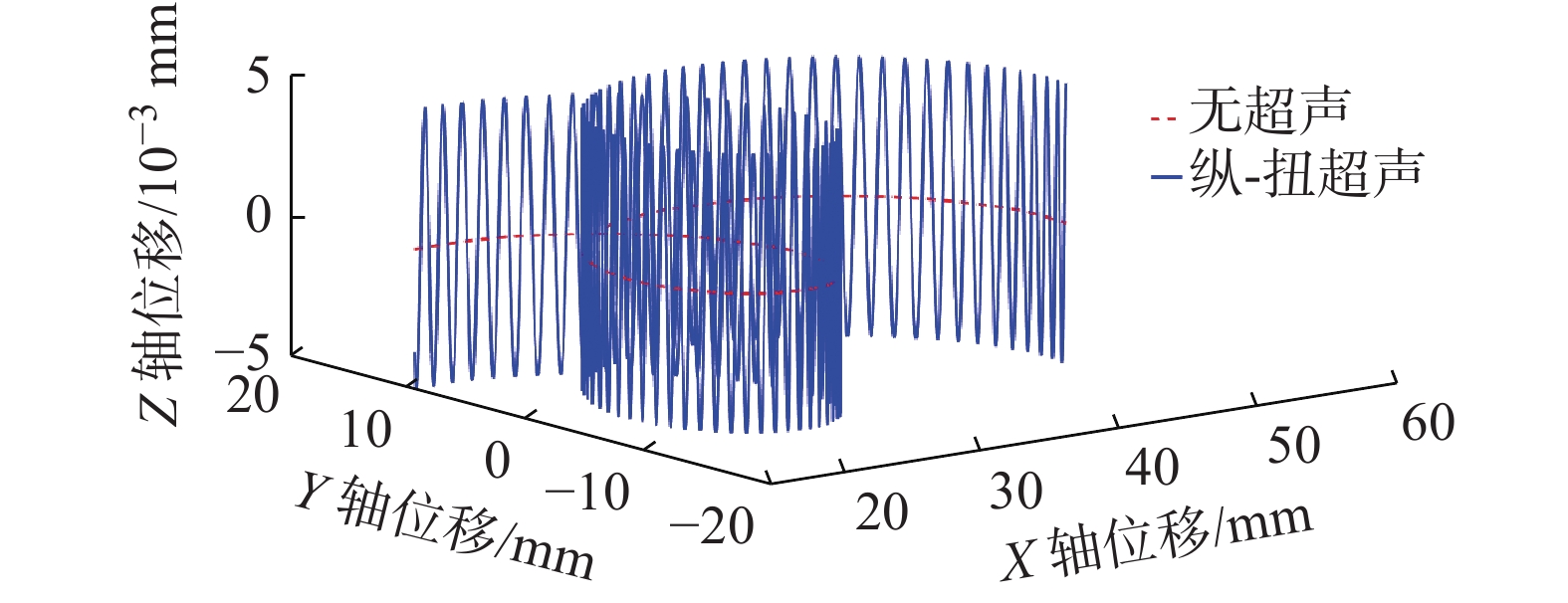
Taking Zirconia ceramics as the research object, a mathematical models of single abrasive particle trajectory is established based on the principle of longitudinal torsion ultrasonic vector decomposition. With the MATLAB simulation software, the conventional grinding and longitudinal torsional ultrasonic grinding are analyzed and the influence of process parameters on the trajectory of longitudinal torsional ultrasonic grinding is discussed. Experiments of conventional grinding and longitudinal torsional ultrasonic grinding on zirconia ceramics are performed to analyze the trajectories of conventional and longitudinal torsional ultrasonic grinding, and the effect of processing parameters on the surface morphology are disclosed. The simulation results of motion trajectory of conventional grinding and longitudinal torsional ultrasonic grinding are consistent with the experimental results, which verifies the correctness of the mathematical model of the trajectory. Moreover, the machined surface morphology with uniform wear marks and slight grooves produced by longitudinal torsional ultrasonic grinding is obviously improved compared with the conventional grinding.
Taking Zirconia ceramics as the research object, a mathematical models of single abrasive particle trajectory is established based on the principle of longitudinal torsion ultrasonic vector decomposition. With the MATLAB simulation software, the conventional grinding and longitudinal torsional ultrasonic grinding are analyzed and the influence of process parameters on the trajectory of longitudinal torsional ultrasonic grinding is discussed. Experiments of conventional grinding and longitudinal torsional ultrasonic grinding on zirconia ceramics are performed to analyze the trajectories of conventional and longitudinal torsional ultrasonic grinding, and the effect of processing parameters on the surface morphology are disclosed. The simulation results of motion trajectory of conventional grinding and longitudinal torsional ultrasonic grinding are consistent with the experimental results, which verifies the correctness of the mathematical model of the trajectory. Moreover, the machined surface morphology with uniform wear marks and slight grooves produced by longitudinal torsional ultrasonic grinding is obviously improved compared with the conventional grinding.








2020, 39(10): 1587-1592.
doi: 10.13433/j.cnki.1003-8728.20190307
Abstract:
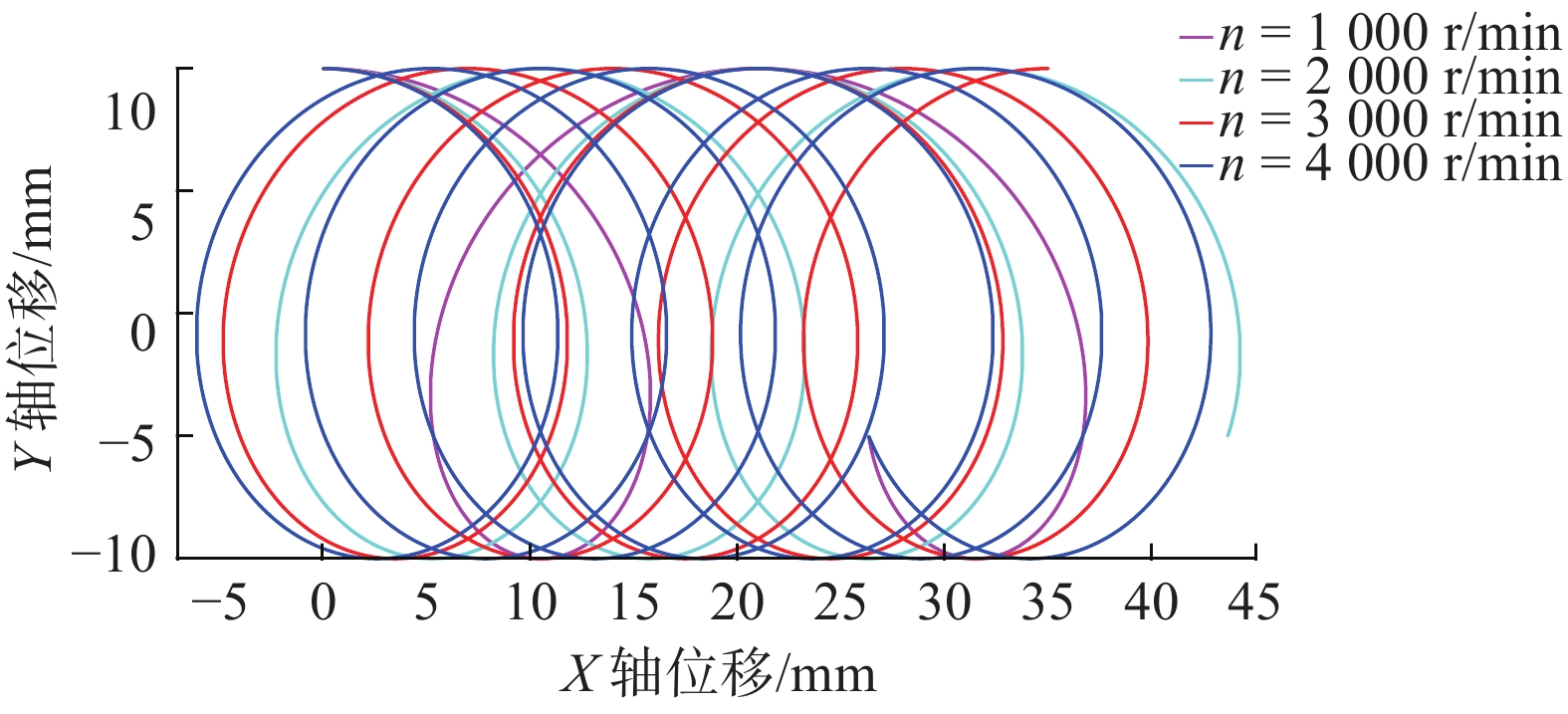
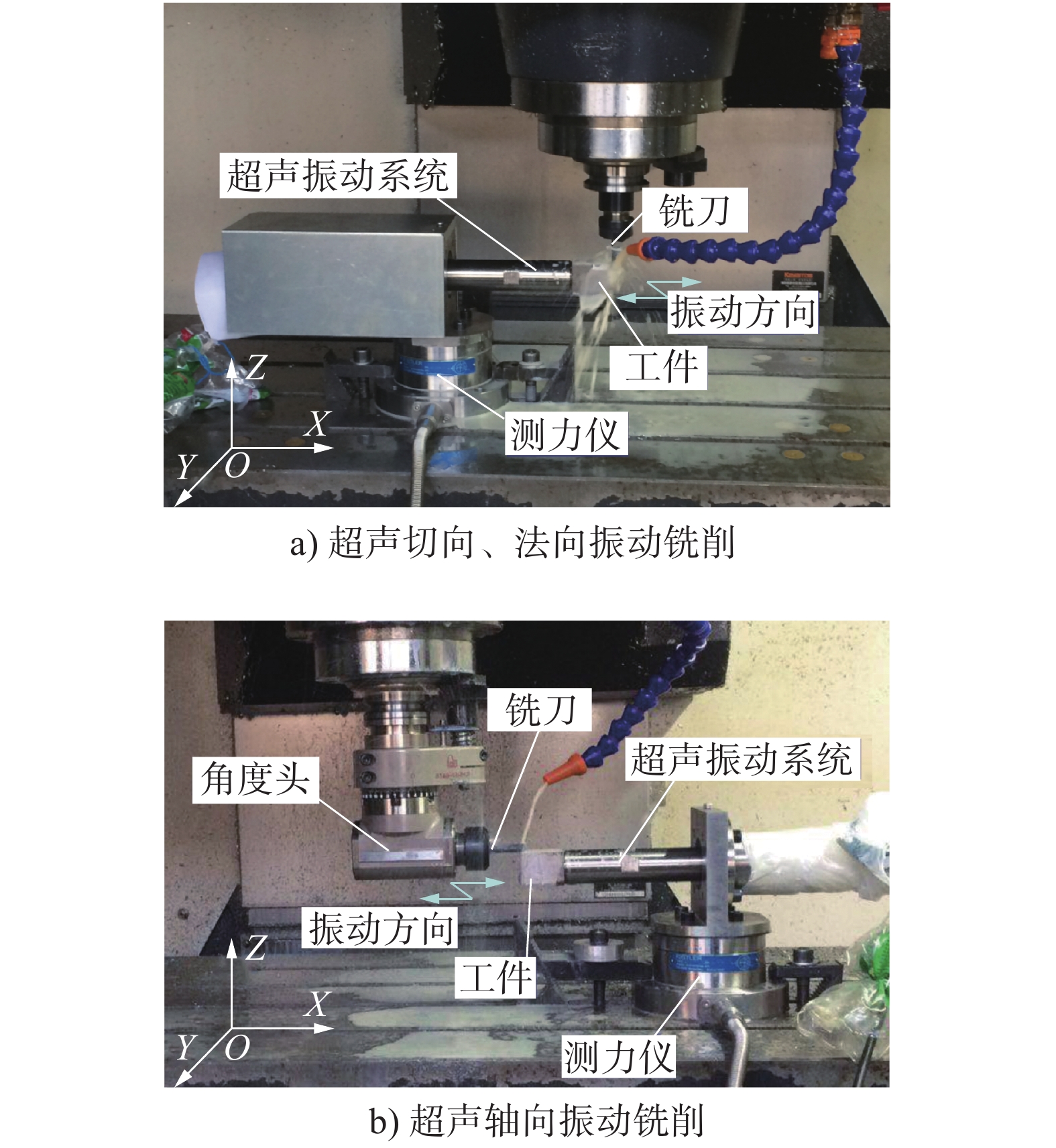
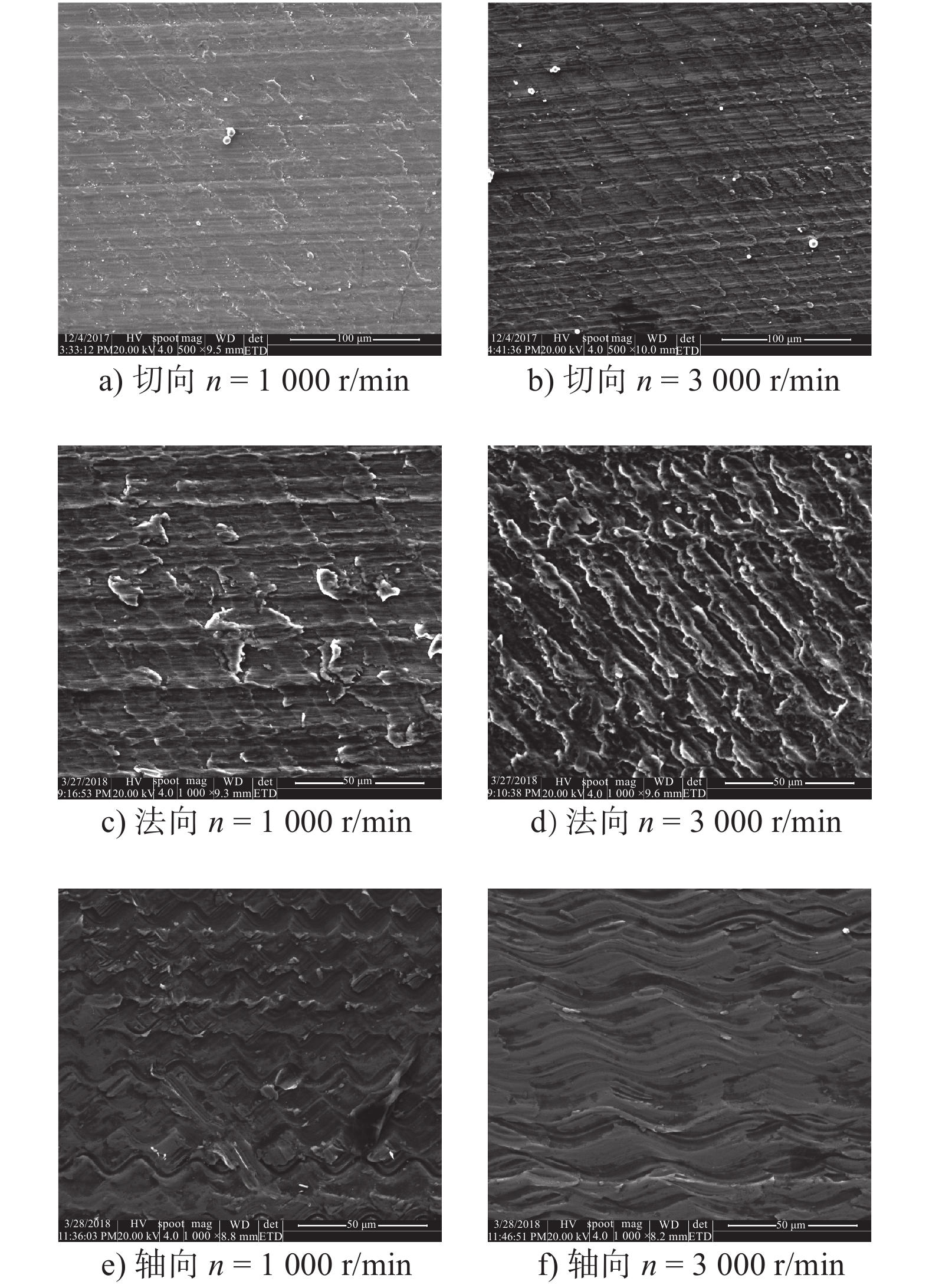
Ultrasonic vibration milling is an acknowledgedadvanced cutting technology, which has unique advantages formachining the difficult-to-cutting materials. However, the superiority of ultrasonic vibration milling is closely related to the process parameters. The microhardness is an important index of machined quality which influences directly the wear resistance and service performance of workpieces.In order to reveal the influence of the process parameters on the vibration milling effect, the test of ultrasonic vibration side milling of TC4 titanium alloy with different vibration action directions was carried out by applying vibration to the workpiece, and the relations of the vibration action directions, amplitude and milling parameters with the microhardness of the machined surface was analyzed. The results show that the microhardness under three vibration directions all increase with the increasing of spindle speed, and the normal ultrasonic vibration milling can achieve higher microhardness than the axial vibration milling and the tangential vibration milling.
Ultrasonic vibration milling is an acknowledgedadvanced cutting technology, which has unique advantages formachining the difficult-to-cutting materials. However, the superiority of ultrasonic vibration milling is closely related to the process parameters. The microhardness is an important index of machined quality which influences directly the wear resistance and service performance of workpieces.In order to reveal the influence of the process parameters on the vibration milling effect, the test of ultrasonic vibration side milling of TC4 titanium alloy with different vibration action directions was carried out by applying vibration to the workpiece, and the relations of the vibration action directions, amplitude and milling parameters with the microhardness of the machined surface was analyzed. The results show that the microhardness under three vibration directions all increase with the increasing of spindle speed, and the normal ultrasonic vibration milling can achieve higher microhardness than the axial vibration milling and the tangential vibration milling.








2020, 39(10): 1593-1599.
doi: 10.13433/j.cnki.1003-8728.20190301
Abstract:
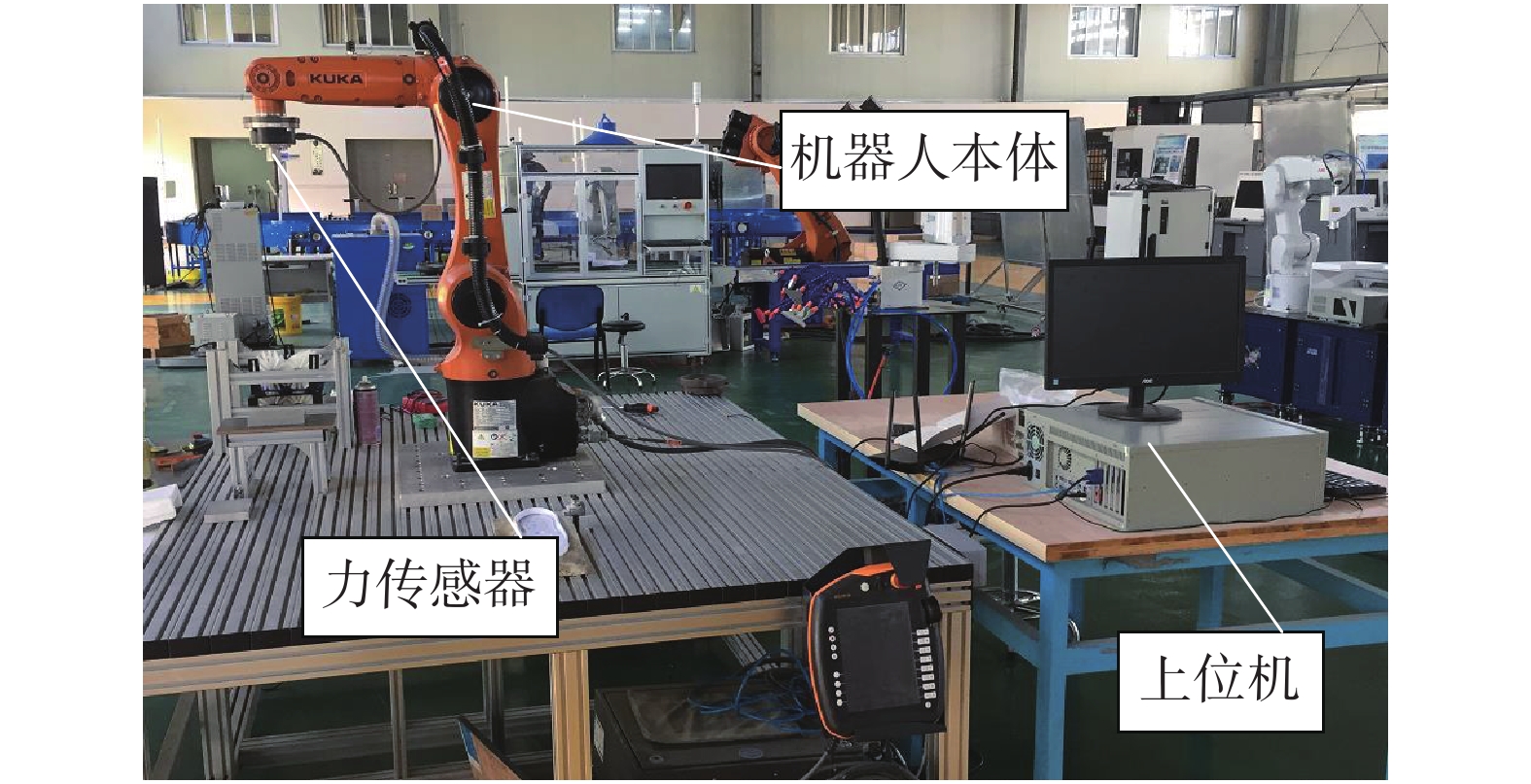
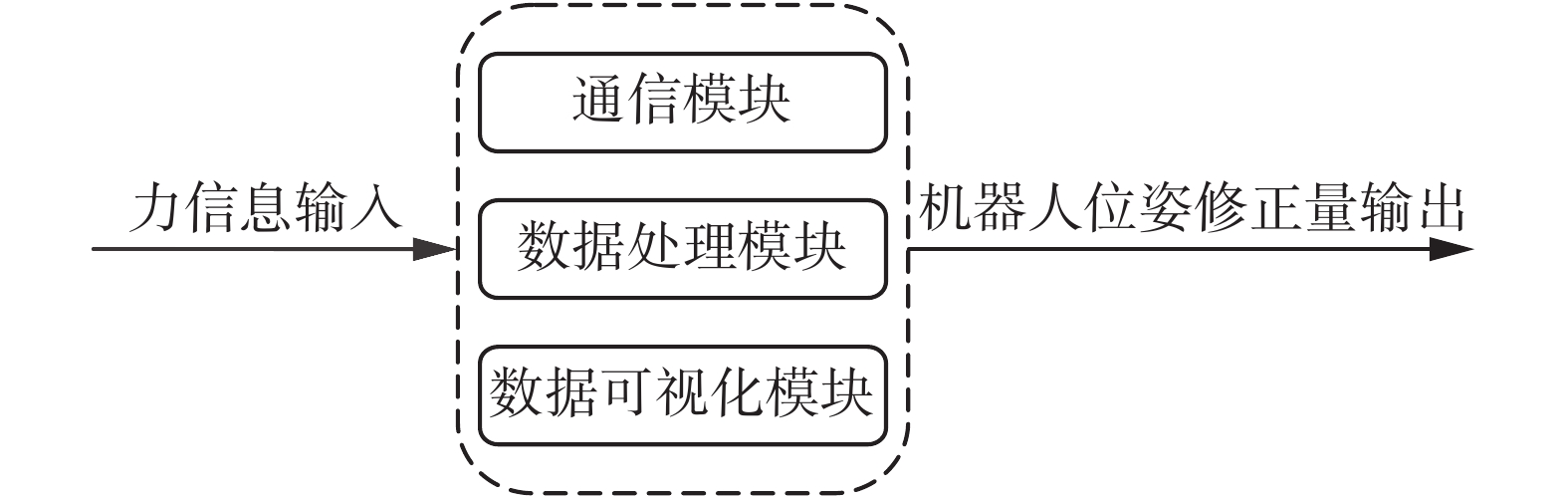
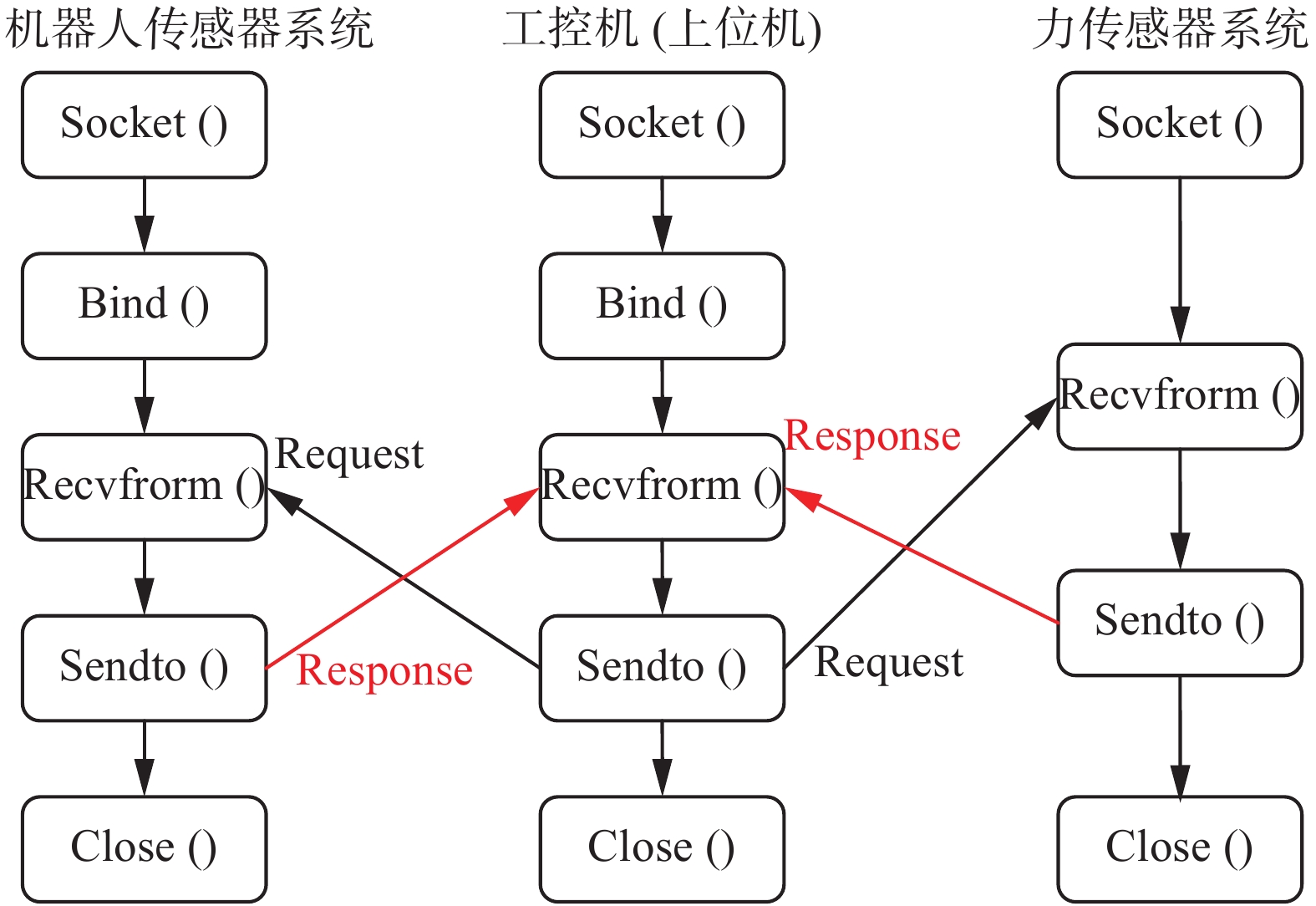
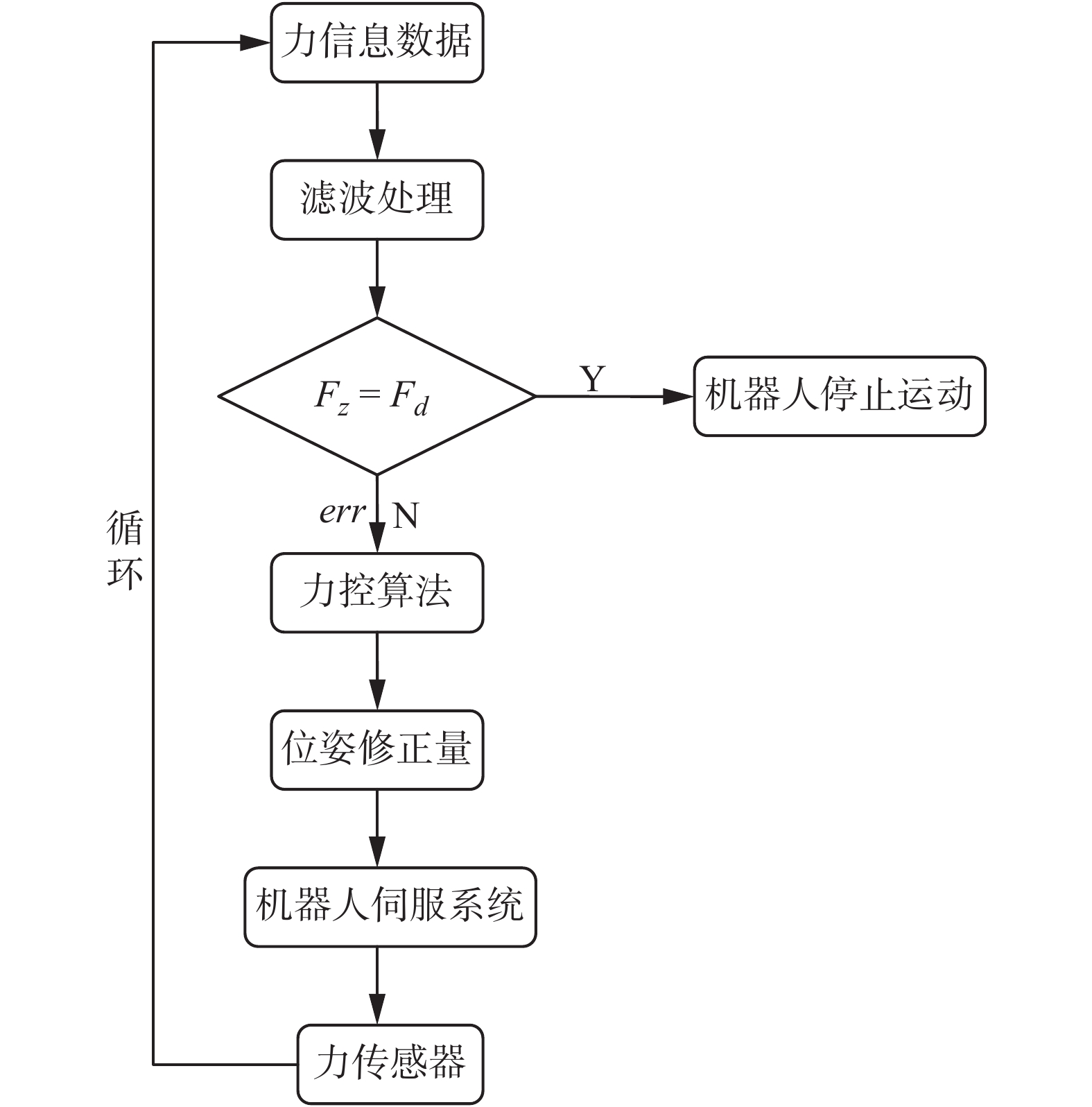
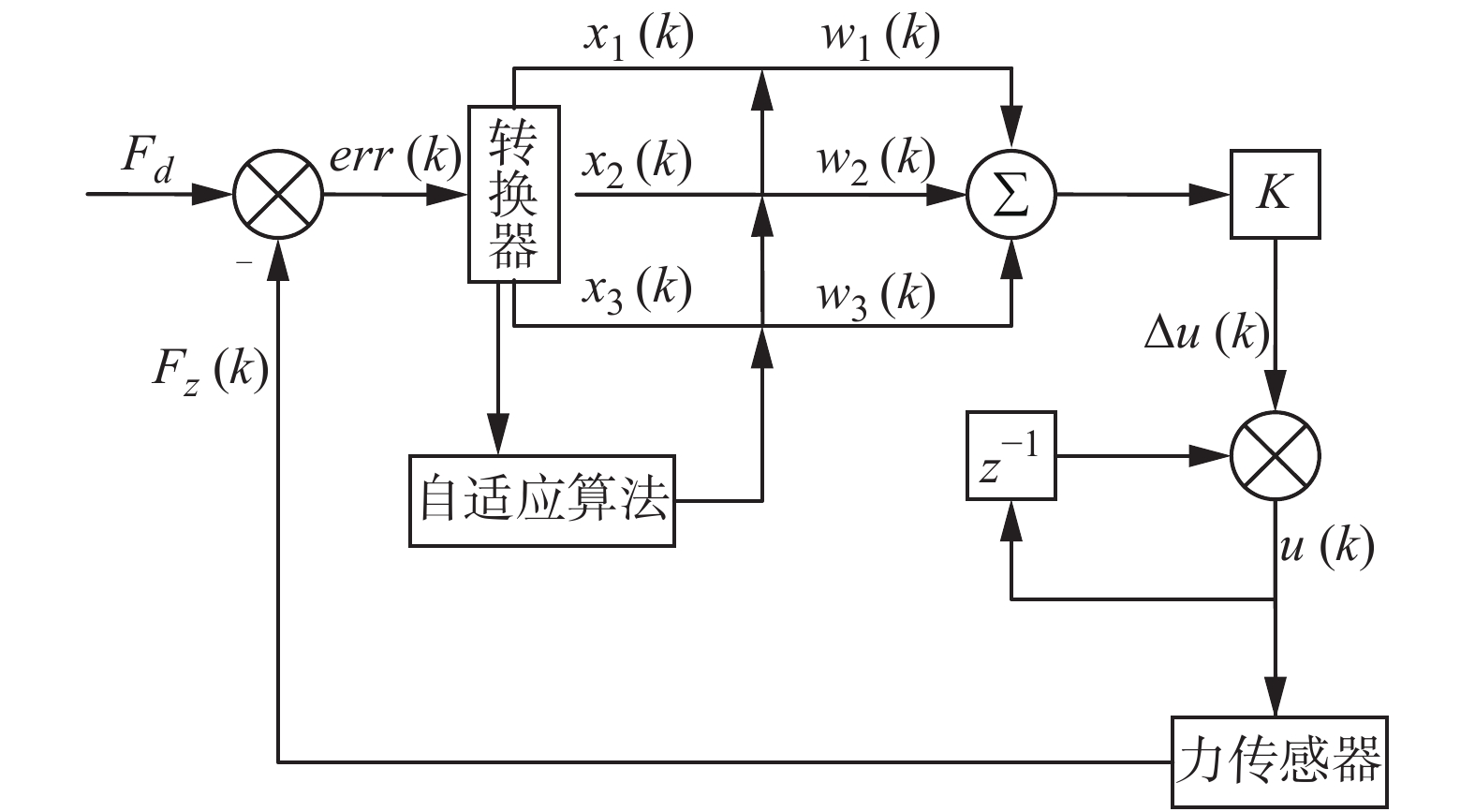
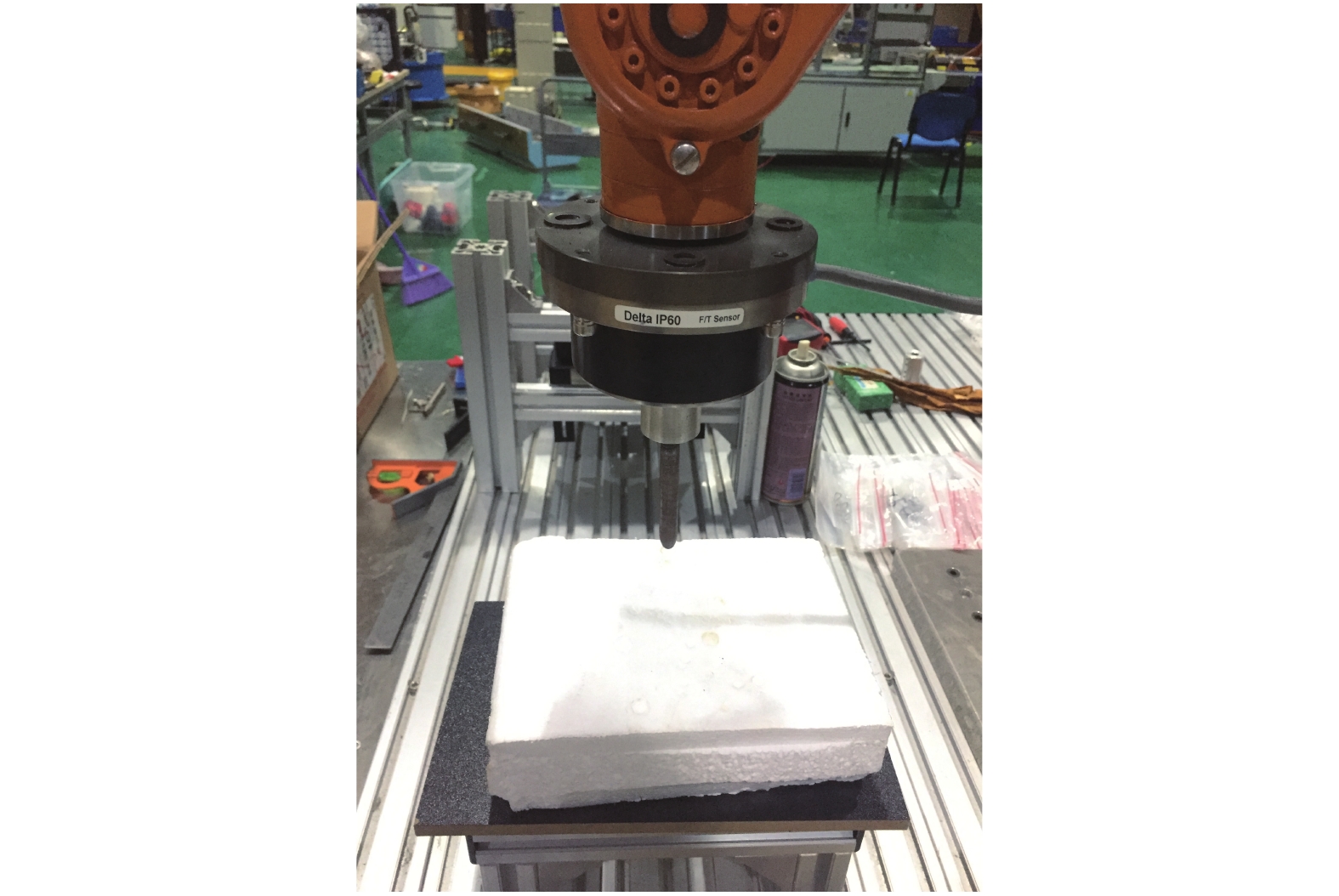
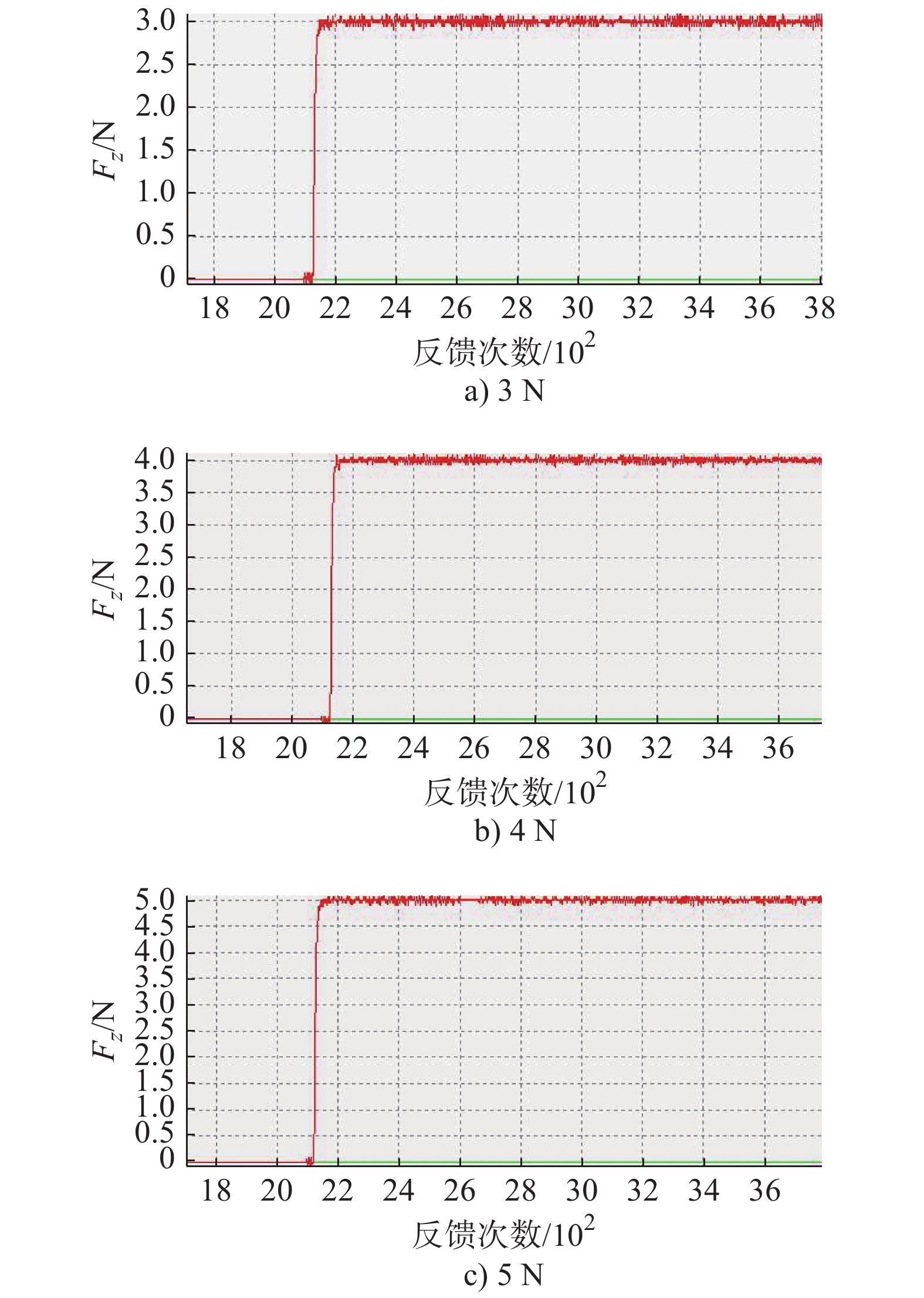
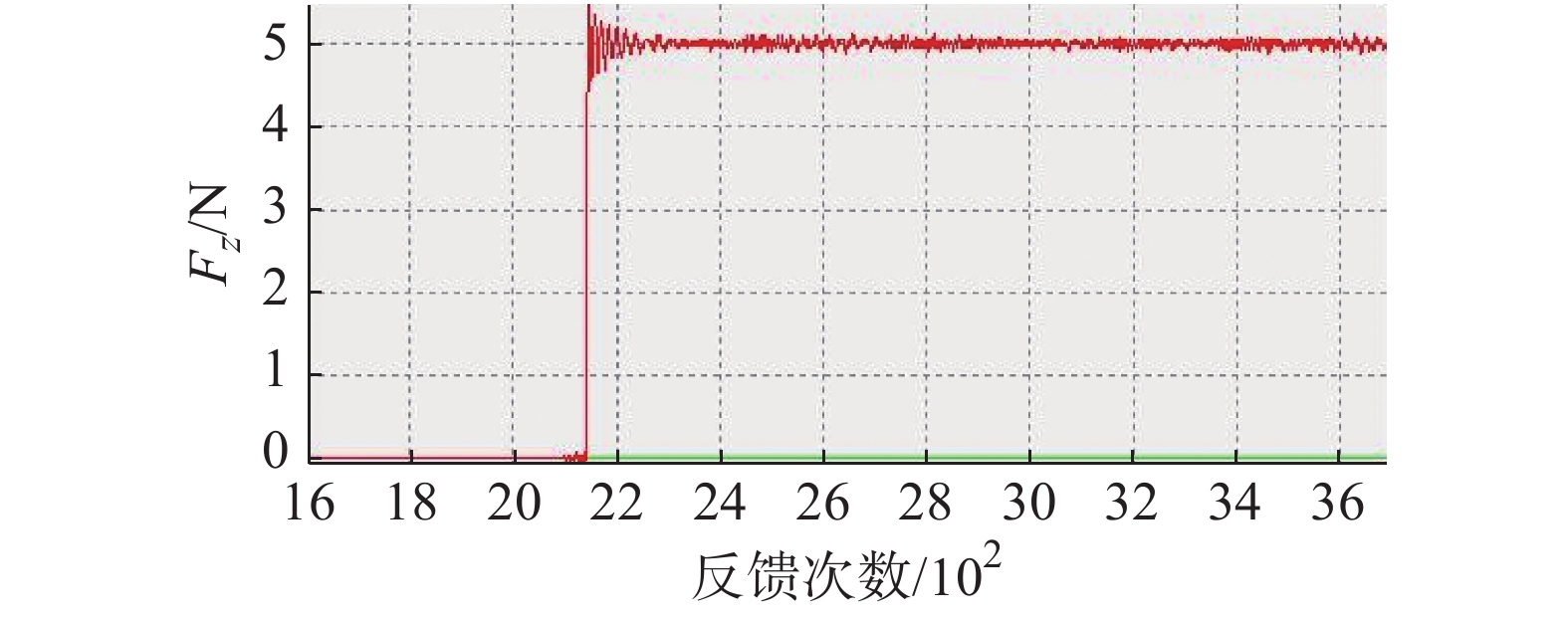
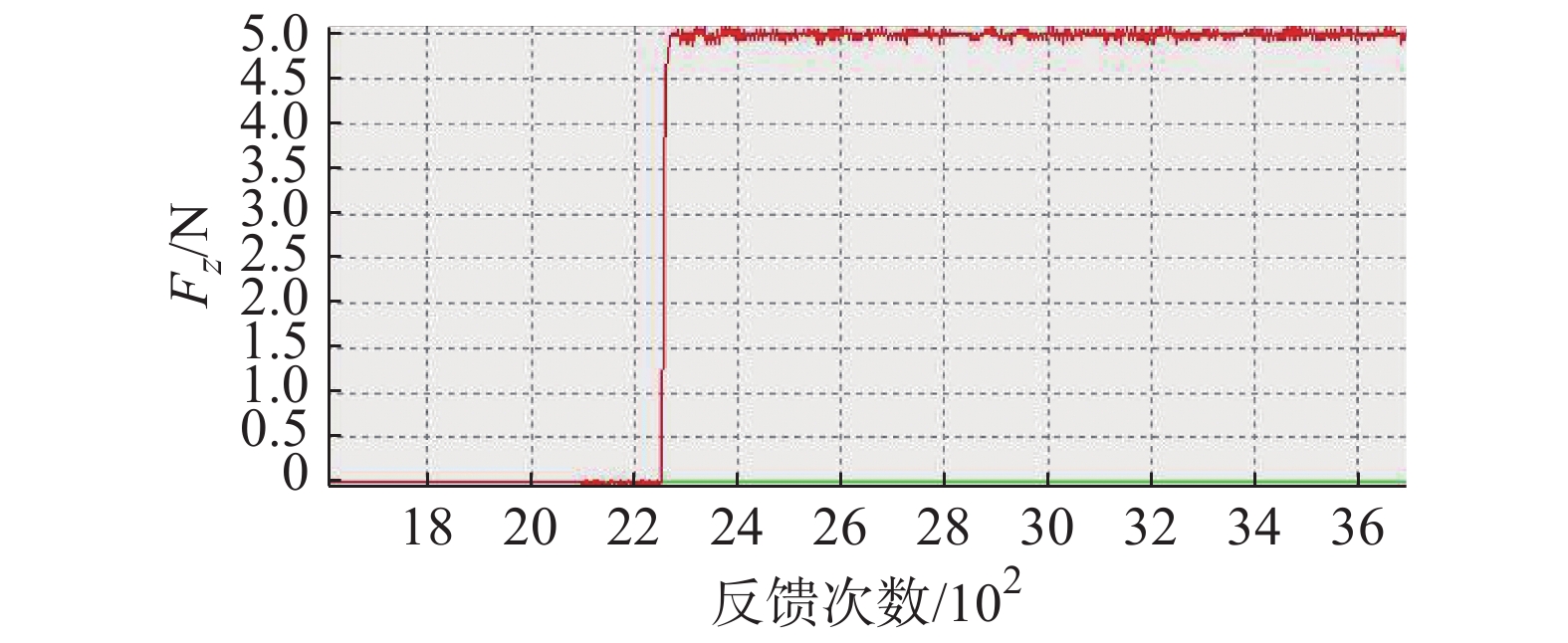
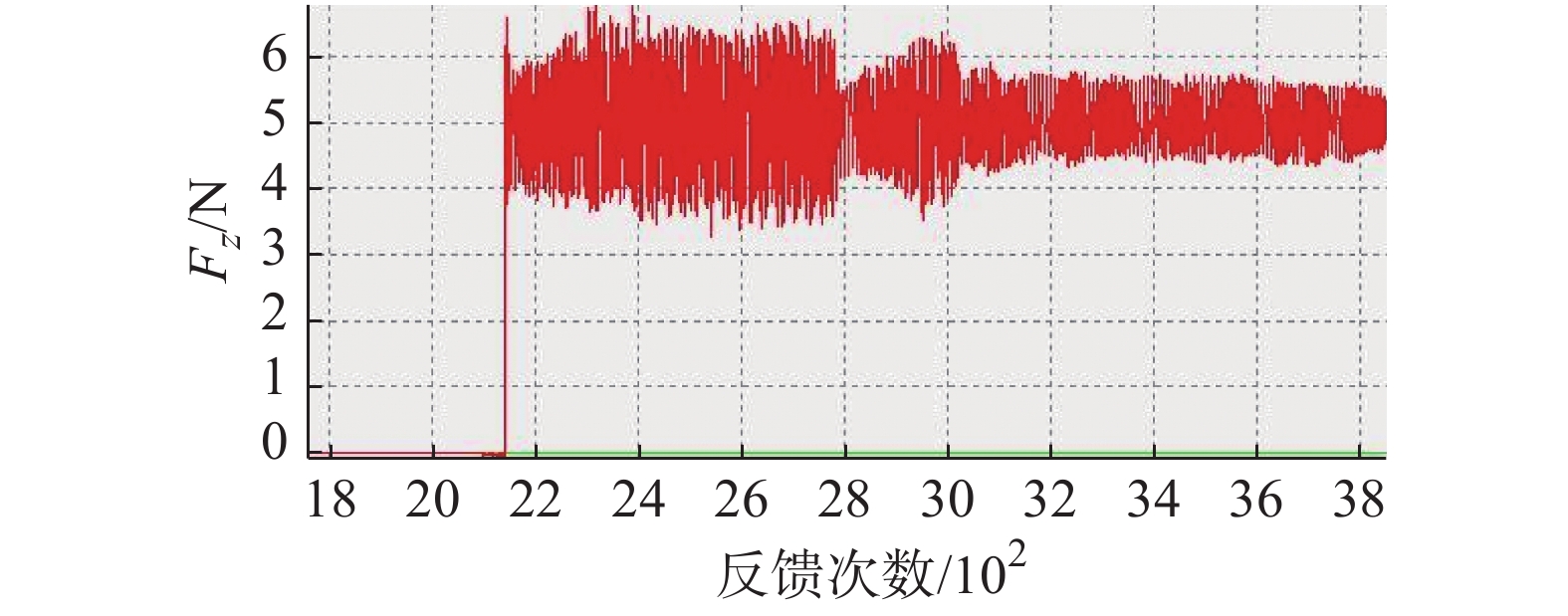
A traditional robot that uses position control has difficultyin precisely controlling the contact force because the end-effector lacks the closed-loop control system formed by the negative feedback link of force. Therefore, an open industrial robot control system based on Windows platform and RSI (Robot Sensor Interface) application package is established. On this basis, a single neuron adaptive PID adaptive algorithm for controlling theconstant forceof the robot is proposed. Experiments on KUKA industrial robot platform show that the force control algorithm can realize the constant force contact between the end-effector and the workpiece under unknown environmental parameters, thusbeing easy to implement. Finally, the constant force control algorithm based on the coefficient K self-adjusting single neuron adaptive PID is proposed.Experiments on it are carried out. The proposed algorithm further improves the adaptability and robustness of the control system.
A traditional robot that uses position control has difficultyin precisely controlling the contact force because the end-effector lacks the closed-loop control system formed by the negative feedback link of force. Therefore, an open industrial robot control system based on Windows platform and RSI (Robot Sensor Interface) application package is established. On this basis, a single neuron adaptive PID adaptive algorithm for controlling theconstant forceof the robot is proposed. Experiments on KUKA industrial robot platform show that the force control algorithm can realize the constant force contact between the end-effector and the workpiece under unknown environmental parameters, thusbeing easy to implement. Finally, the constant force control algorithm based on the coefficient K self-adjusting single neuron adaptive PID is proposed.Experiments on it are carried out. The proposed algorithm further improves the adaptability and robustness of the control system.











2020, 39(10): 1600-1605.
doi: 10.13433/j.cnki.1003-8728.20190265
Abstract:
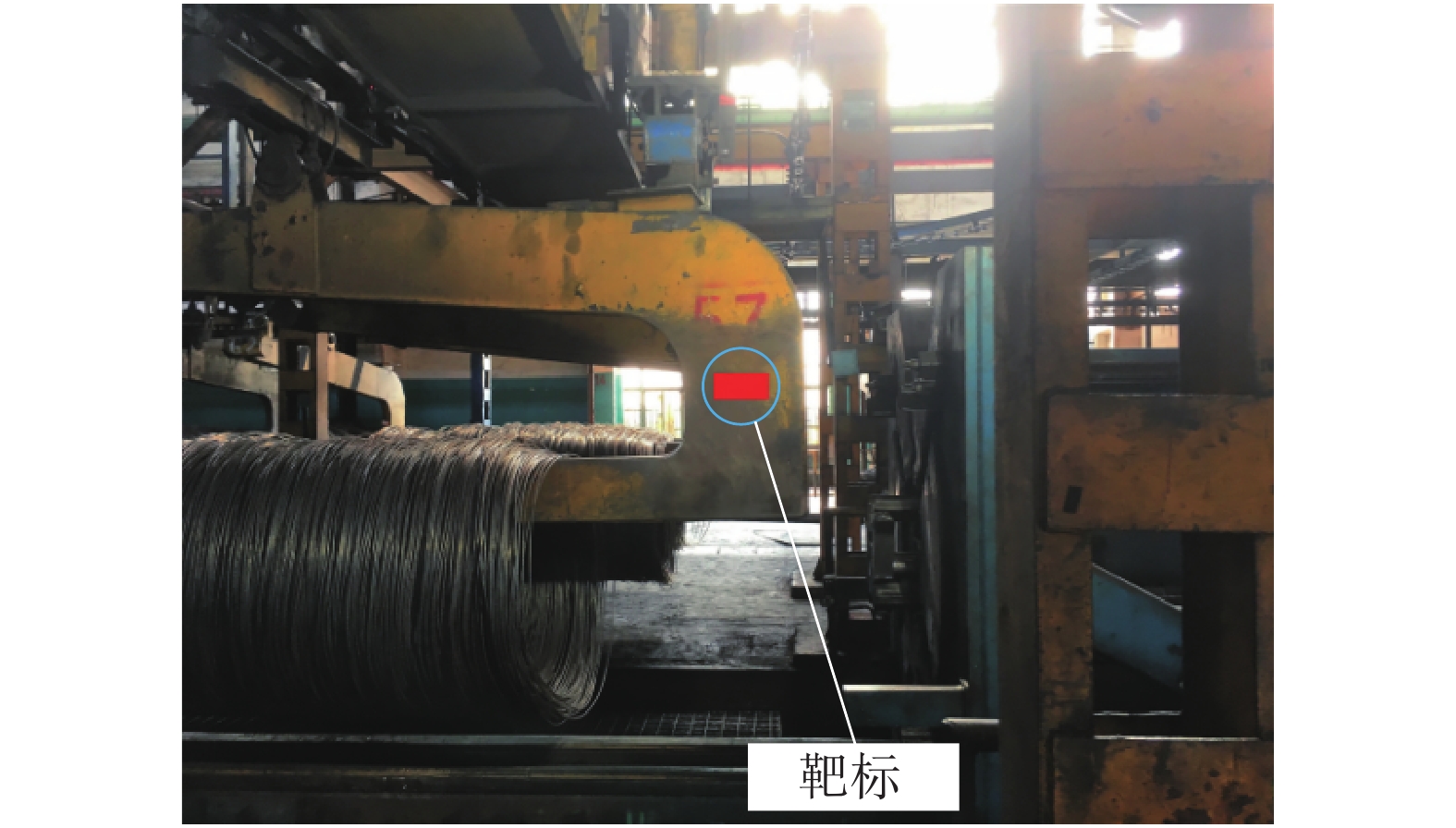
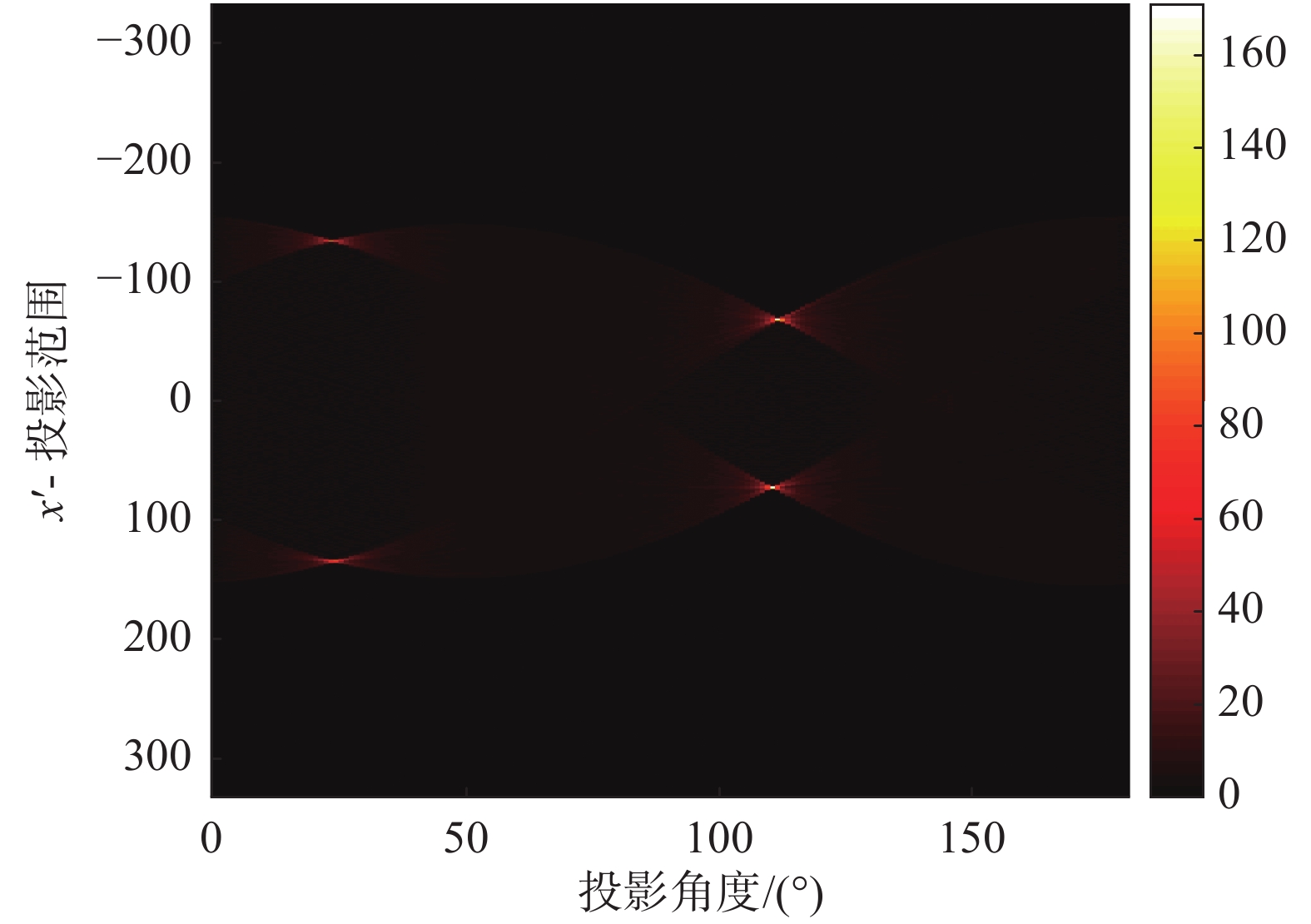
Monocular vision based method is proposed for the on-line angle detection of C-shaped hook. Firstly, a red rectangle mark is pasted on the proper position of surface of the C-shaped hook, and then the image processing technique is employed to obtain the rectangle contour shape of the target from the videos. Finally, the models for target deflection mode are built to realize the measurement of the horizontal and vertical angles. The presnt method has high computational efficiency and accuracy, and the error is below 0.6° comparing with the results of three-coordinates measuring machine. It satisfies the accuracy requirement of the applications in the online detection of the angle of C-shaped hook of the steel wire binding machine.
Monocular vision based method is proposed for the on-line angle detection of C-shaped hook. Firstly, a red rectangle mark is pasted on the proper position of surface of the C-shaped hook, and then the image processing technique is employed to obtain the rectangle contour shape of the target from the videos. Finally, the models for target deflection mode are built to realize the measurement of the horizontal and vertical angles. The presnt method has high computational efficiency and accuracy, and the error is below 0.6° comparing with the results of three-coordinates measuring machine. It satisfies the accuracy requirement of the applications in the online detection of the angle of C-shaped hook of the steel wire binding machine.








2020, 39(10): 1606-1614.
doi: 10.13433/j.cnki.1003-8728.20190303
Abstract:
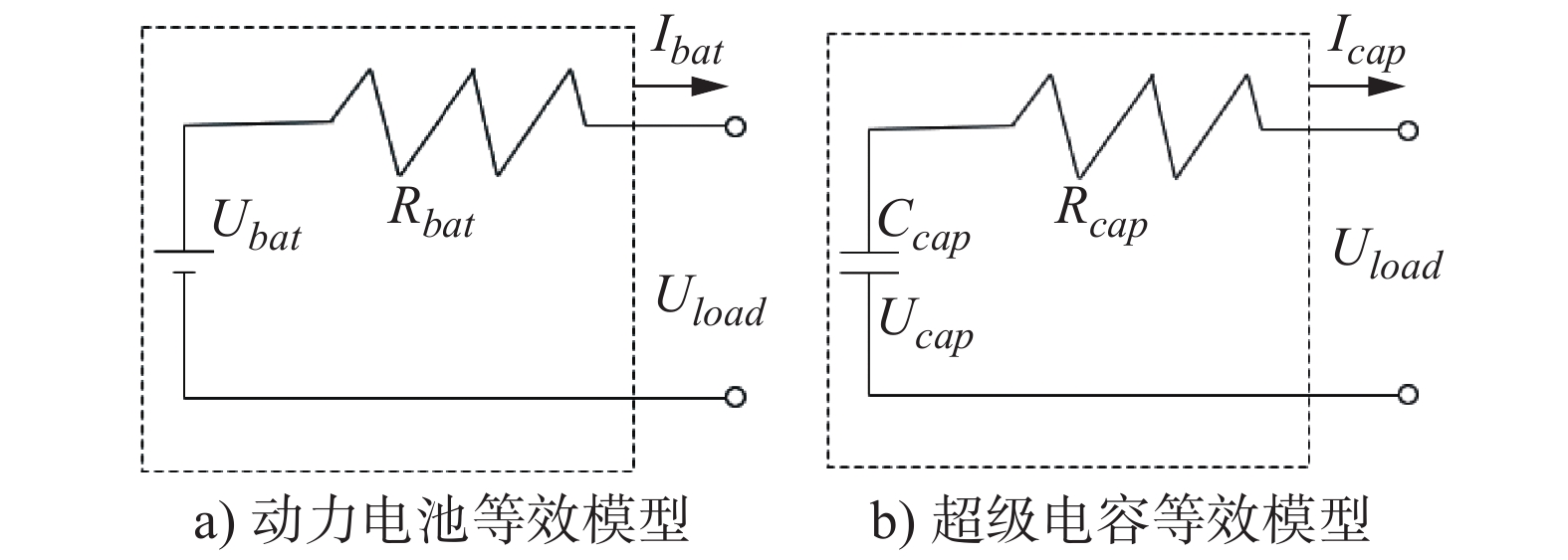
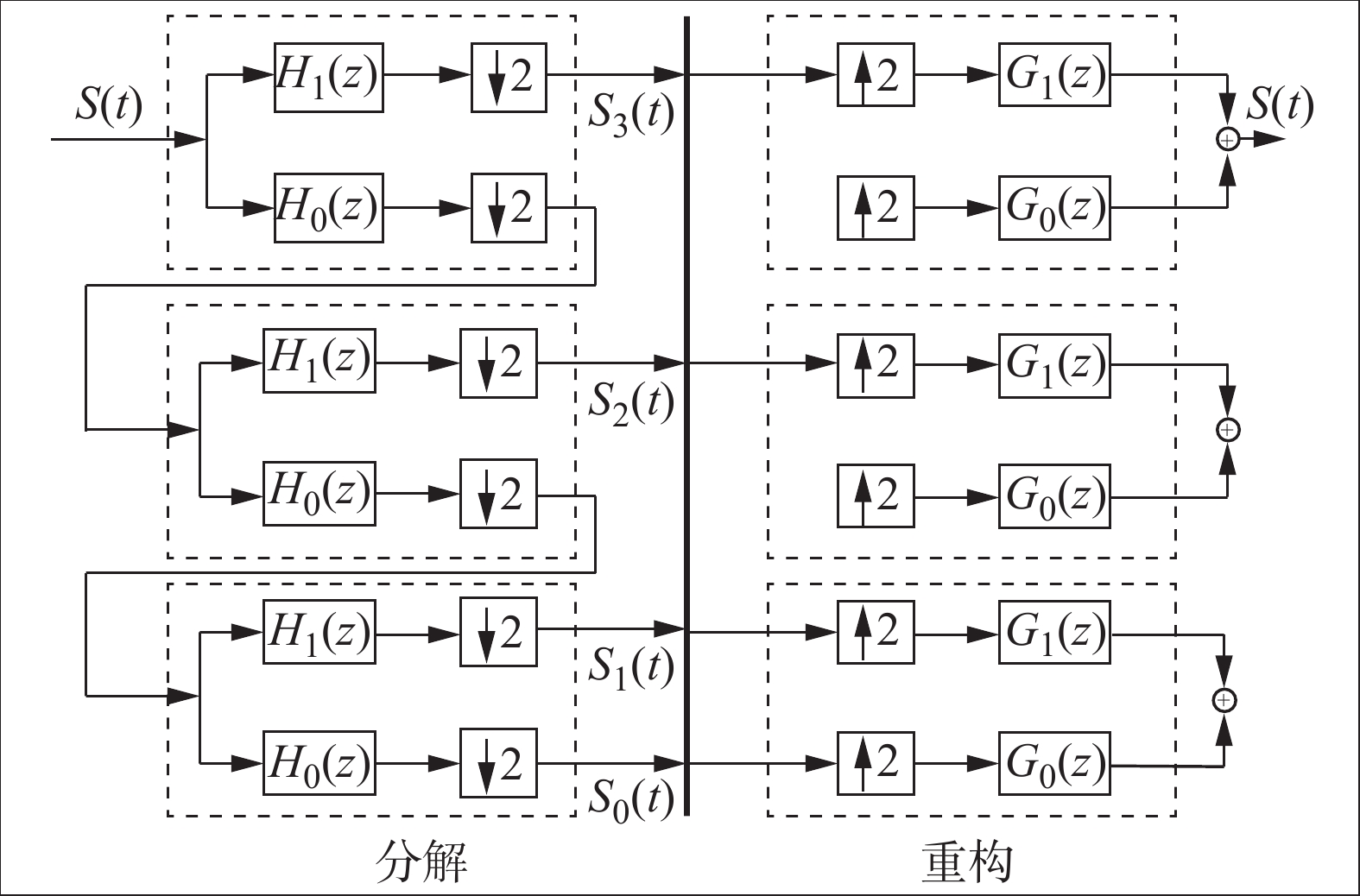
Aiming at the low power density, short cycle life and transient power reception of single battery in electric vehicle, a hybrid energy storage system being composed of power battery and supercapacitor was designed. The energy management strategy based on the wavelet transform-fuzzy control was proposed, and the wavelet transform of different decomposition levels was evaluated and selected. The present control strategy used wavelet transform to decompose the power demand into low frequency and high frequency components, and distributed them according to the dynamic response characteristics of the energy sources, so as to avoid the reception of transient power of battery. In order to fully utilize the load shifting rule of supercapacitor to improve the performance and cycle life of battery, fuzzy control was adopted to maintain the SOC value of supercapacitor within appropriate limits. MATLAB/Simulink simulation model was established to verify the effectiveness of the present control strategy based on the driving cycles randomly combined, and compared with the conventional control strategy. The simulation results show that the present energy management strategy can not only effectively prevent the battery from high-current impact, but also improve the energy utilization rate by 5.96% comparing with the single battery used in electric vehicle. The maximum battery output current decreases by 57.1%, and battery temperature rise decreases by 35.3%.
Aiming at the low power density, short cycle life and transient power reception of single battery in electric vehicle, a hybrid energy storage system being composed of power battery and supercapacitor was designed. The energy management strategy based on the wavelet transform-fuzzy control was proposed, and the wavelet transform of different decomposition levels was evaluated and selected. The present control strategy used wavelet transform to decompose the power demand into low frequency and high frequency components, and distributed them according to the dynamic response characteristics of the energy sources, so as to avoid the reception of transient power of battery. In order to fully utilize the load shifting rule of supercapacitor to improve the performance and cycle life of battery, fuzzy control was adopted to maintain the SOC value of supercapacitor within appropriate limits. MATLAB/Simulink simulation model was established to verify the effectiveness of the present control strategy based on the driving cycles randomly combined, and compared with the conventional control strategy. The simulation results show that the present energy management strategy can not only effectively prevent the battery from high-current impact, but also improve the energy utilization rate by 5.96% comparing with the single battery used in electric vehicle. The maximum battery output current decreases by 57.1%, and battery temperature rise decreases by 35.3%.










2020, 39(10): 1615-1623.
doi: 10.13433/j.cnki.1003-8728.20190314
Abstract:
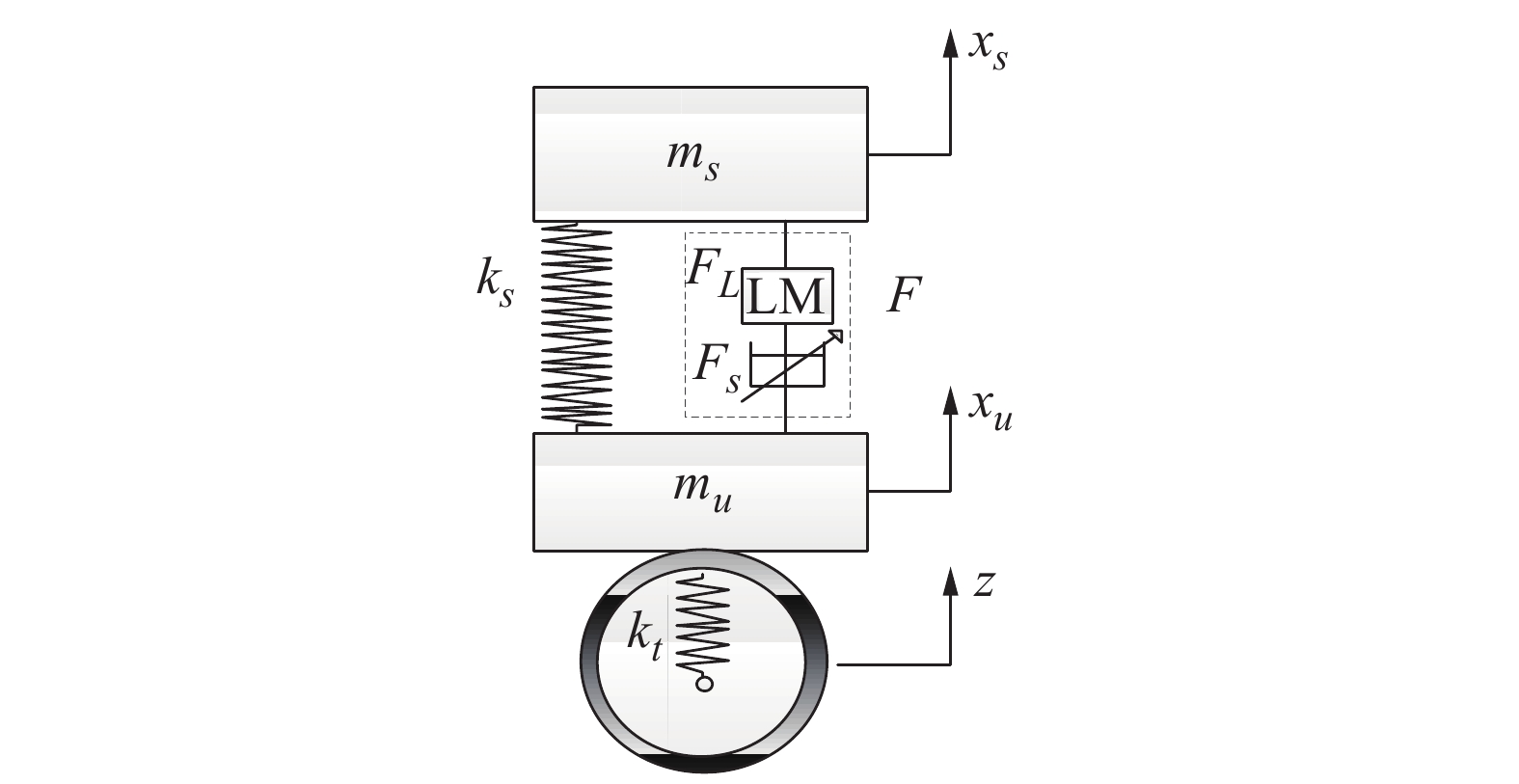
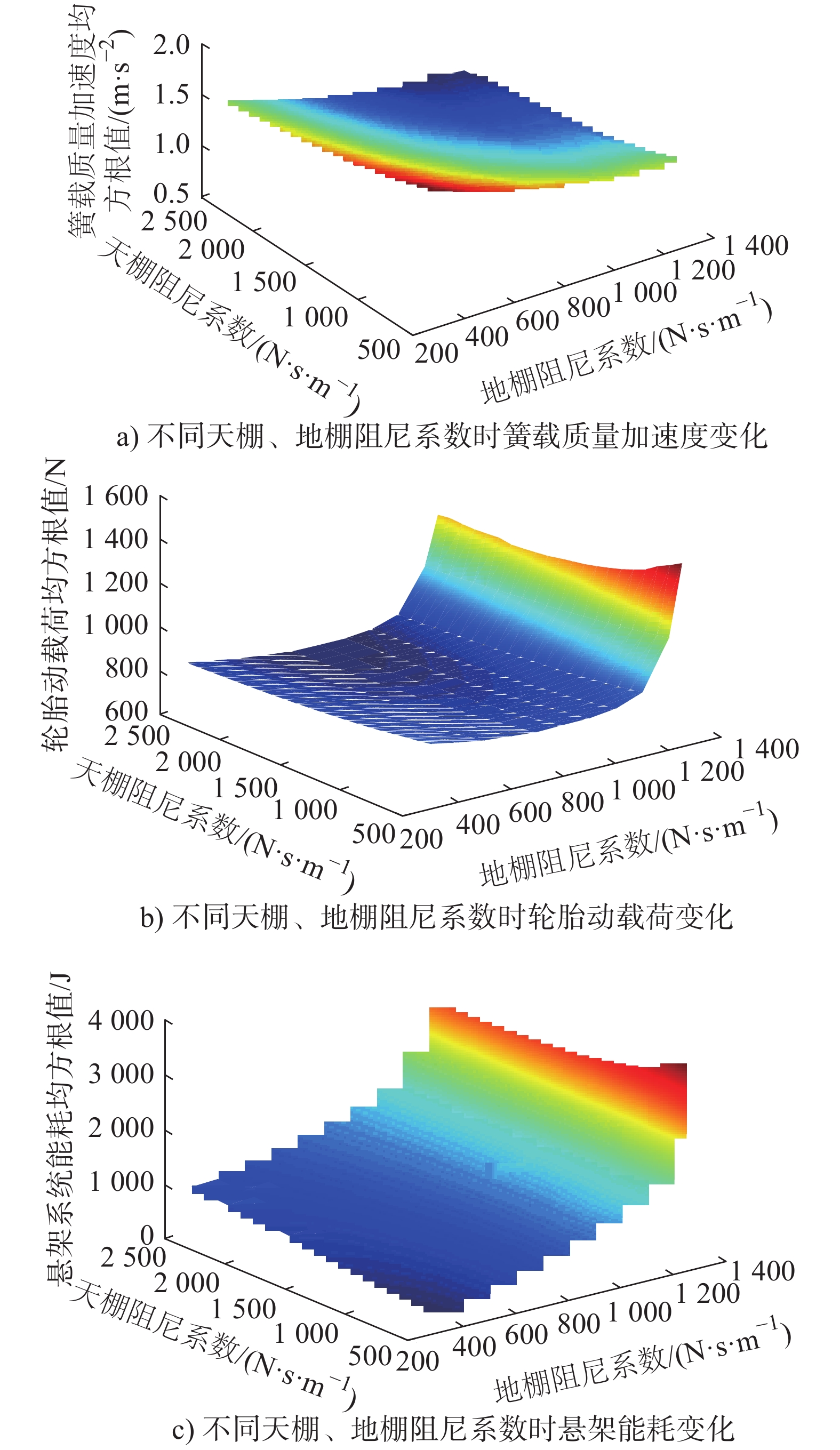
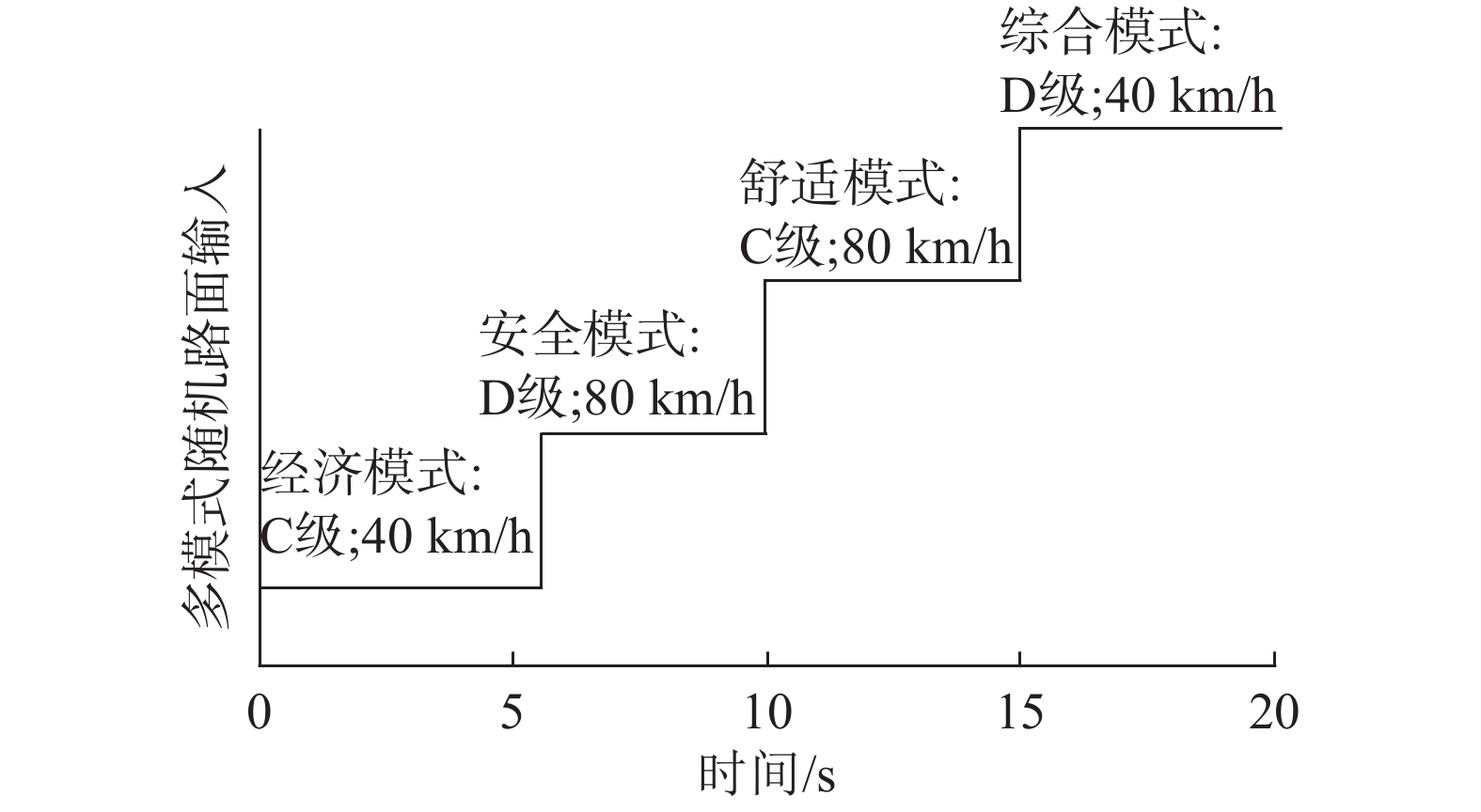
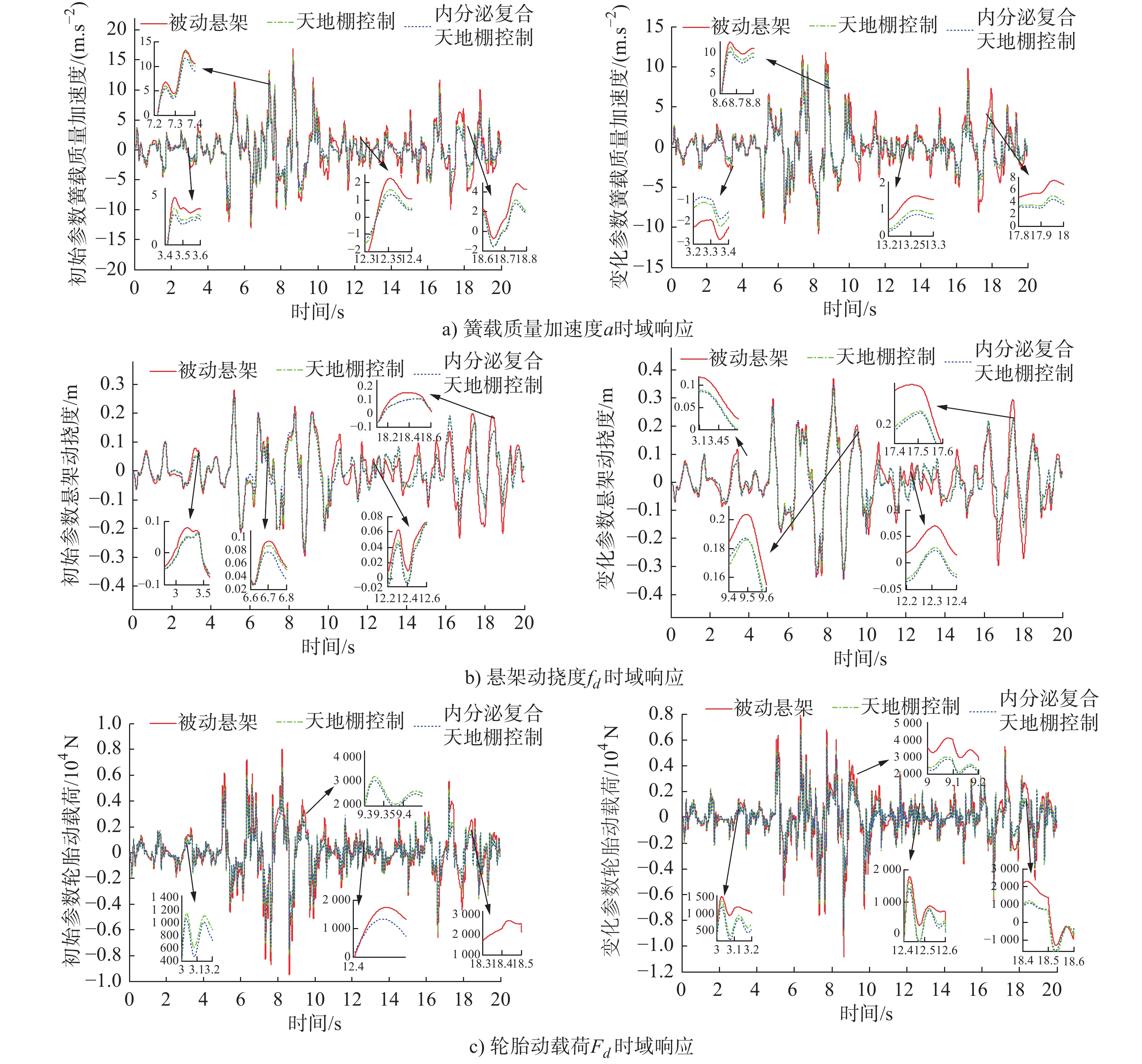
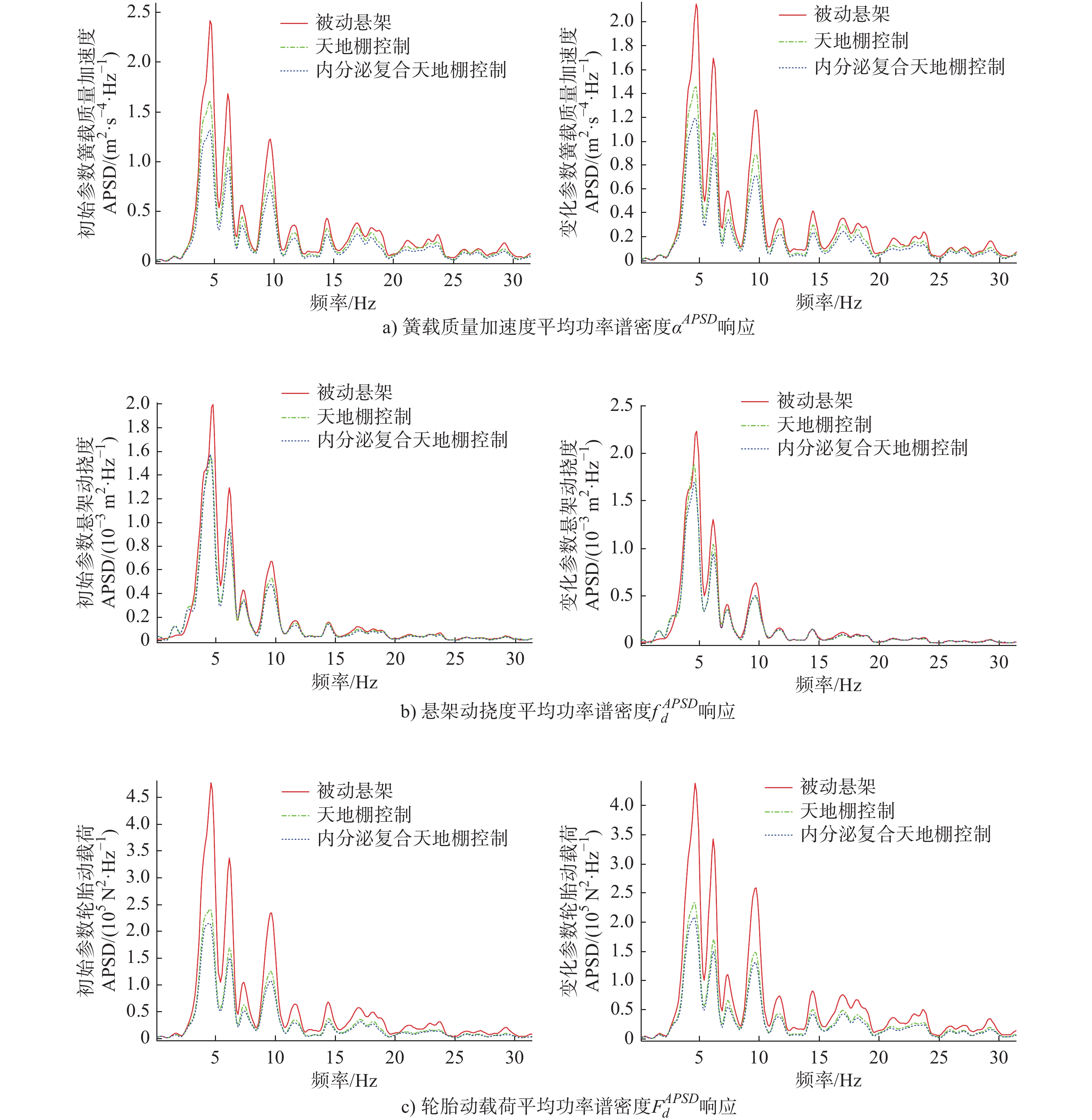
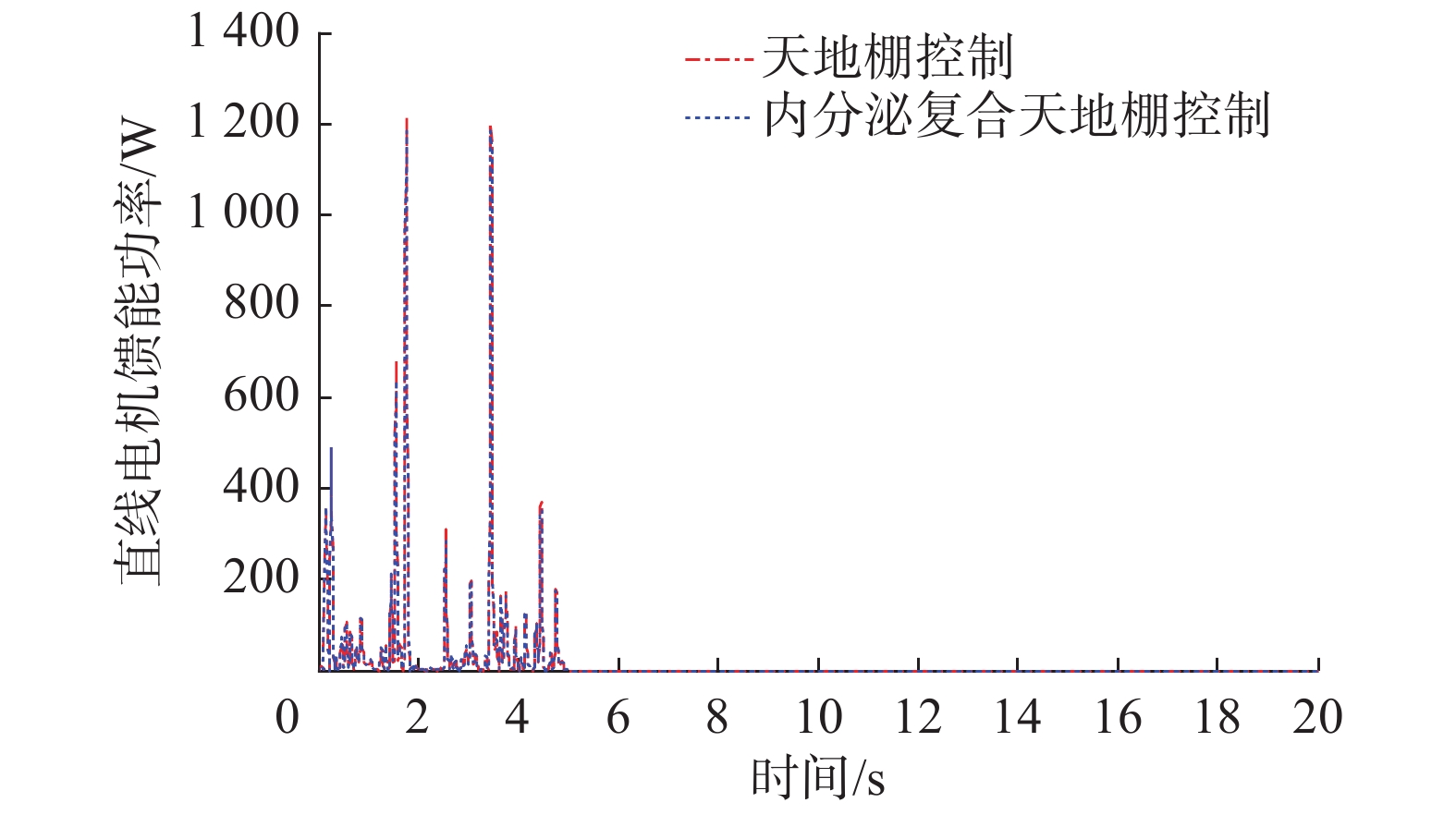
In order to improve vehicle ride comfort and handling stability, also realize vibration energy recovery, an active suspension system based on electro-magnetic linear hybrid actuator (EMLHA) was designed in this study. The suspension motion was divided into four modes: economy, safety, comfort and comprehensive according to actual driving conditions of vehicles. An endocrine compound skyhook and groundhook control strategy was proposed, which combines endocrine control including long feedback and short feedback with skyhook and groundhook control. The weighted optimization function and the minimum energy consumption optimization function were used to determine the optimal skyhook and groundhook damping coefficients for different modes, and the endocrine control law was designed, the simulation analysis was carried out under random pavement. The results show that the control effect of endocrine compound skyhook and groundhook control is better than that of skyhook and groundhook control, which also has better adaptability to the simulation of changing parameters, improves vehicle ride comfort and handling stability, also recovers part of vibration energy.
In order to improve vehicle ride comfort and handling stability, also realize vibration energy recovery, an active suspension system based on electro-magnetic linear hybrid actuator (EMLHA) was designed in this study. The suspension motion was divided into four modes: economy, safety, comfort and comprehensive according to actual driving conditions of vehicles. An endocrine compound skyhook and groundhook control strategy was proposed, which combines endocrine control including long feedback and short feedback with skyhook and groundhook control. The weighted optimization function and the minimum energy consumption optimization function were used to determine the optimal skyhook and groundhook damping coefficients for different modes, and the endocrine control law was designed, the simulation analysis was carried out under random pavement. The results show that the control effect of endocrine compound skyhook and groundhook control is better than that of skyhook and groundhook control, which also has better adaptability to the simulation of changing parameters, improves vehicle ride comfort and handling stability, also recovers part of vibration energy.






2020, 39(10): 1624-1631.
doi: 10.13433/j.cnki.1003-8728.20190342
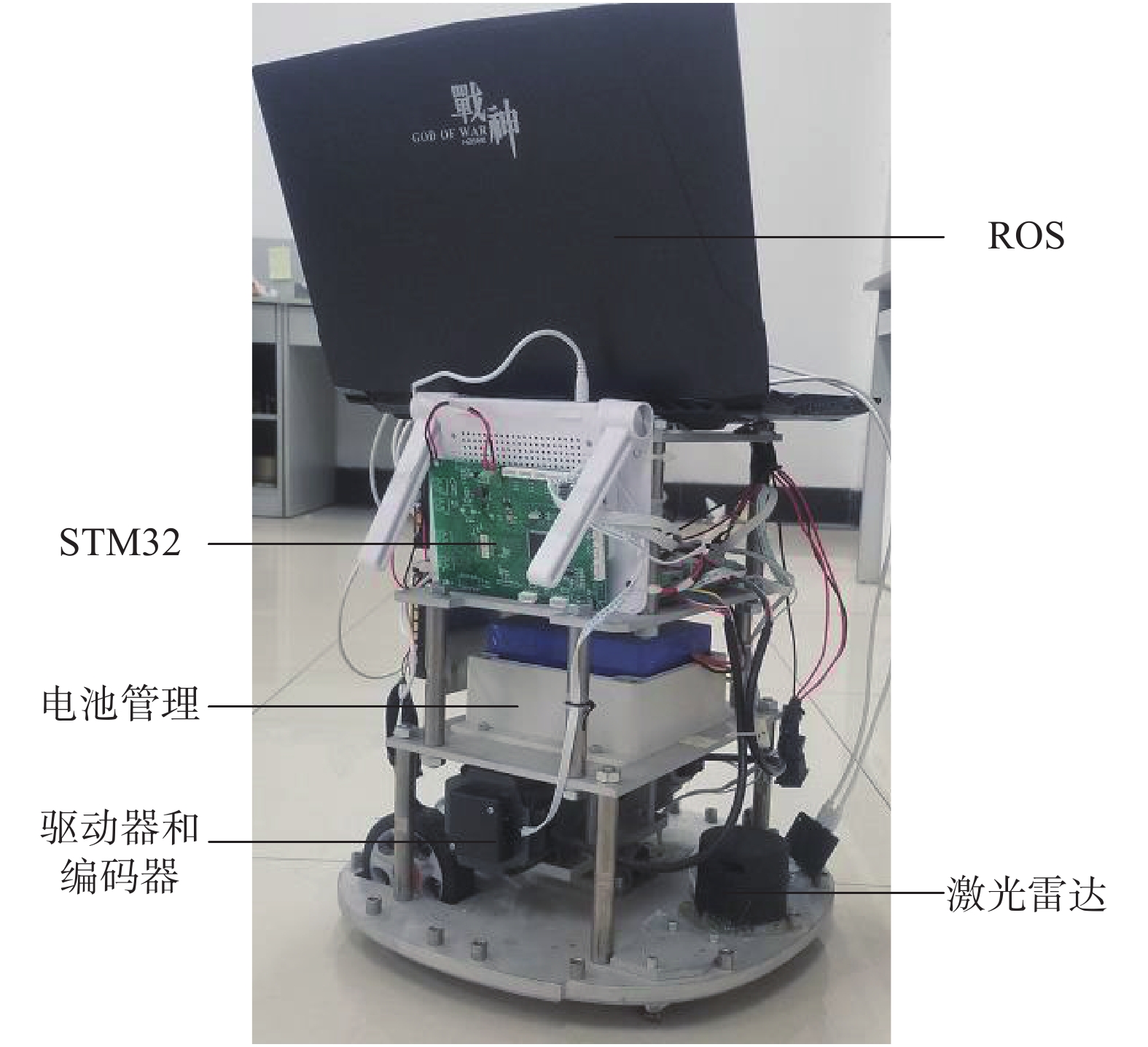
Abstract:
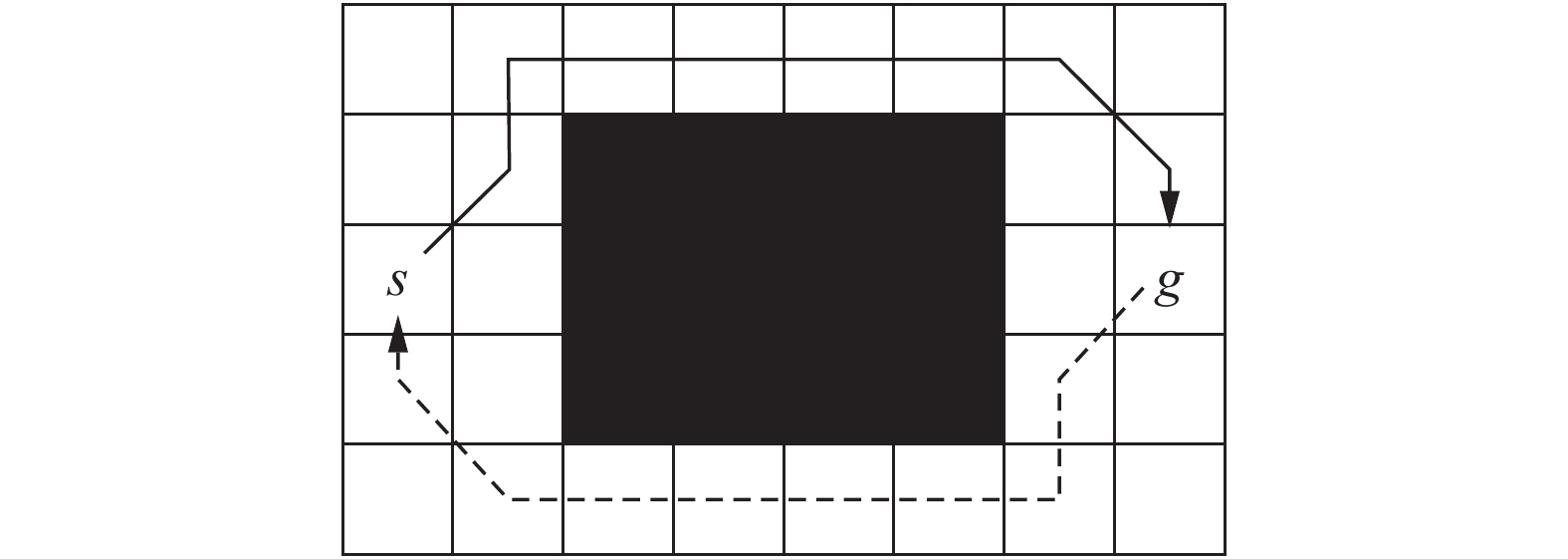
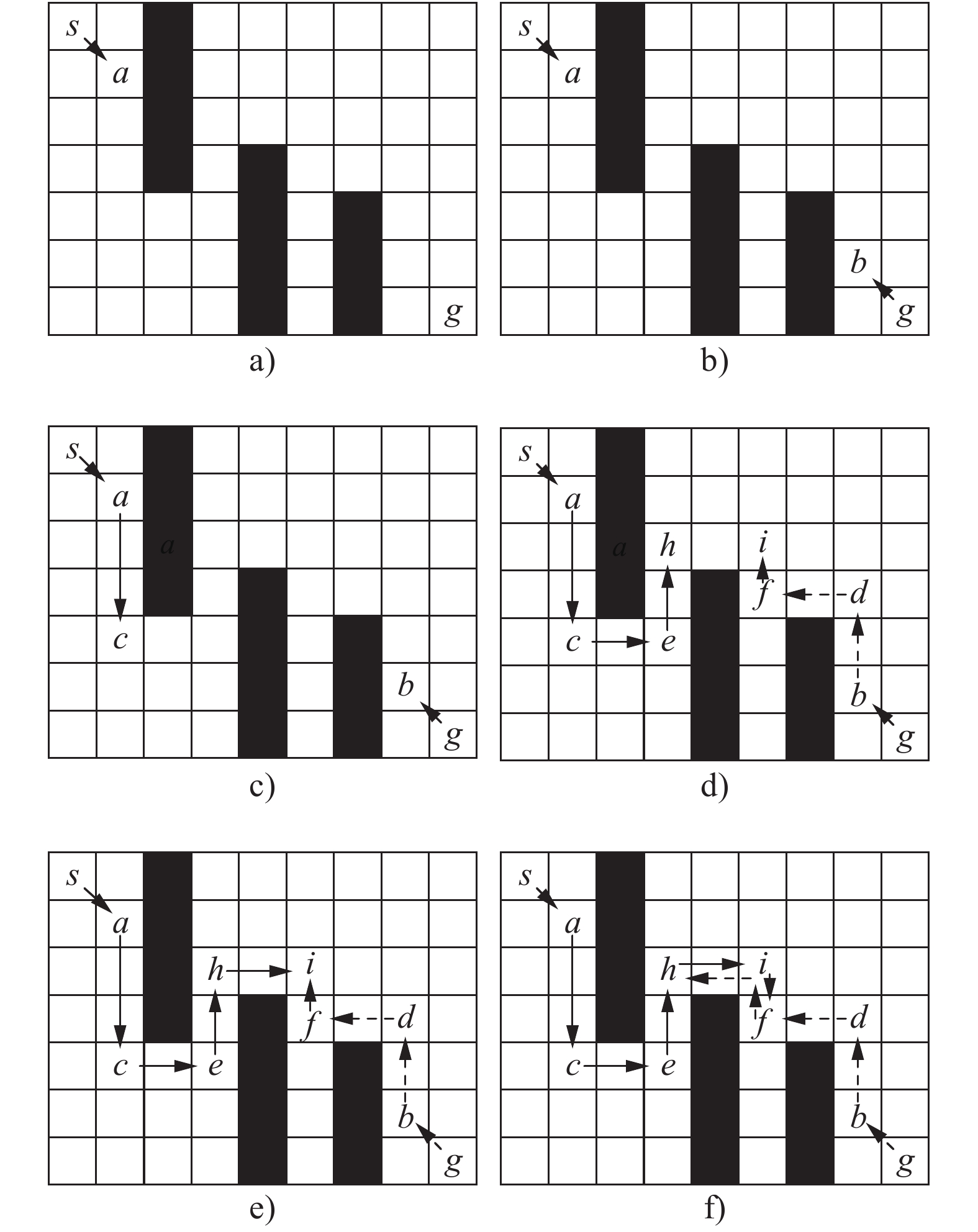
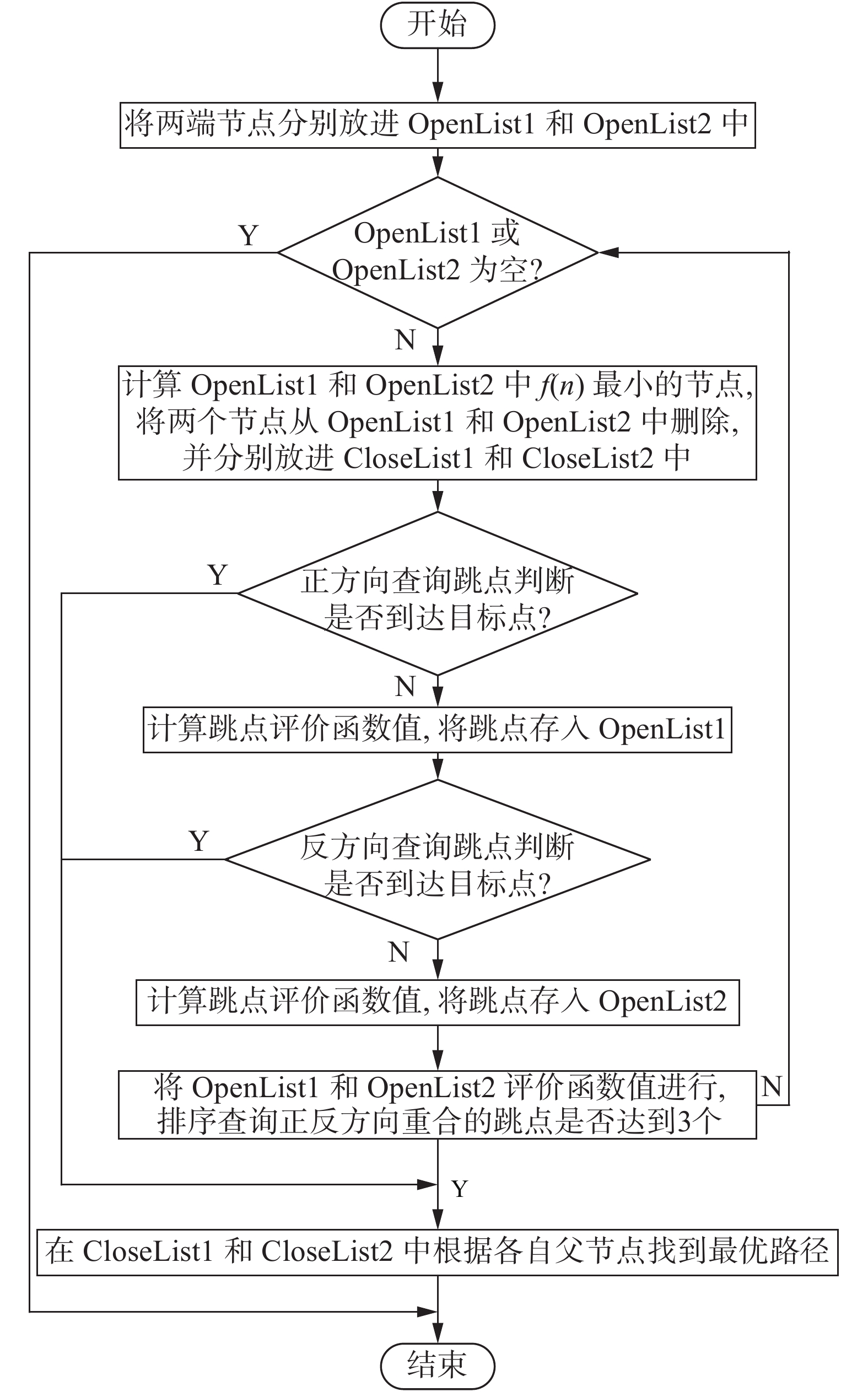
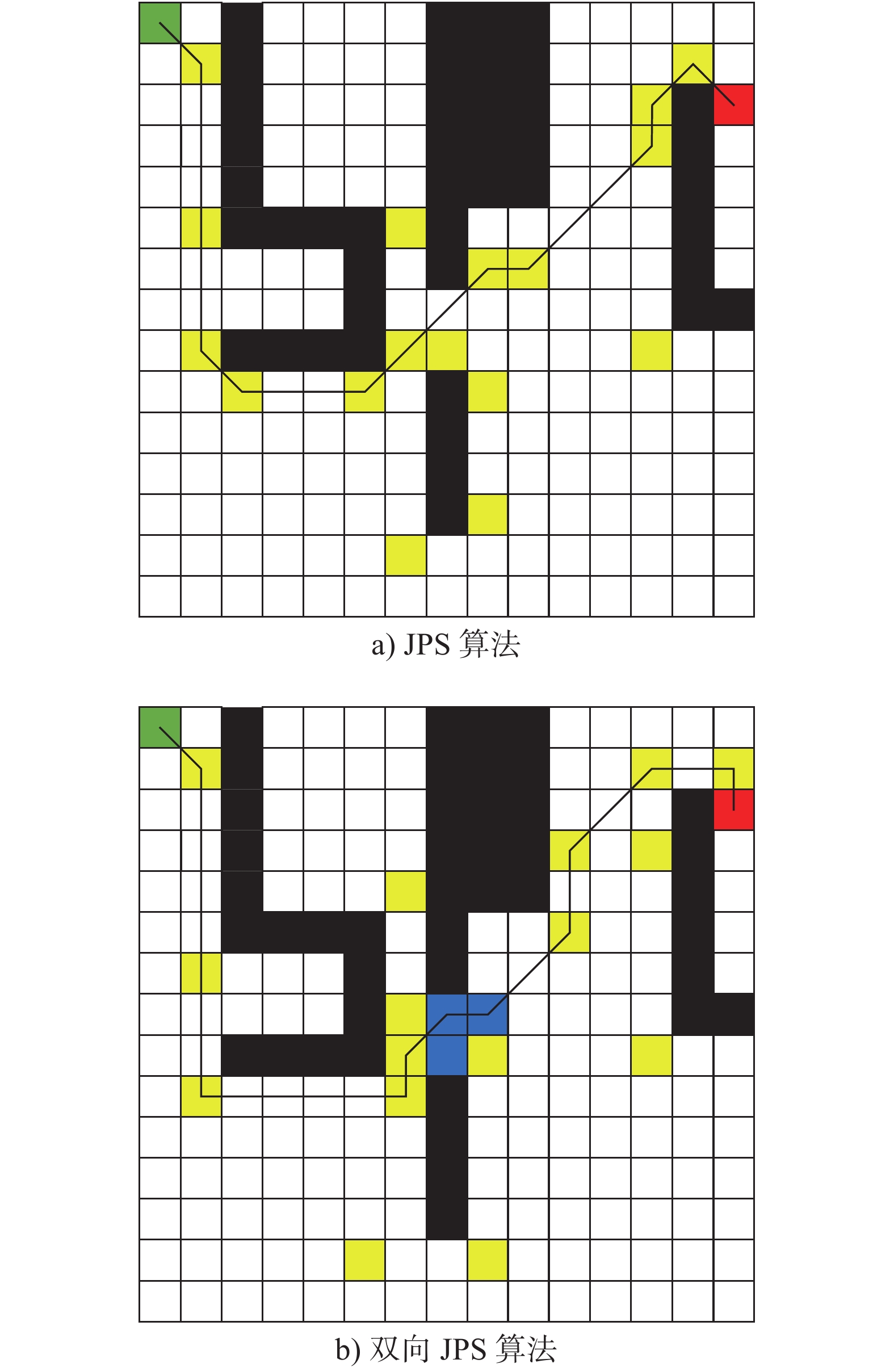
In view of the jump point search algorithm' s unsafe preprocessing rules, long path search time and large memory consumption in global path planning of mobile robots, a global path planning method based on bidirectional jump point search algorithm is proposed in this paper. This new method improves the jump point filtering rules, and alternately searches the path from two directions, which greatly reduces the search time and extension nodes, and improves the safety of the robot. In order to verify the effectiveness of the algorithm, raster maps of different specifications are used for simulation experiments. The simulation results show that the path search time of bidirectional jump point search algorithm is shorter than that of jump point search algorithm, and the larger the raster map is, the more obvious the effect is. Finally, the navigation experiment is carried out in the actual mobile service robot. The experimental results show that the bidirectional jump point search algorithm reduces the path search time by about 30% compared with the jump point search algorithm, and the security is higher.
In view of the jump point search algorithm' s unsafe preprocessing rules, long path search time and large memory consumption in global path planning of mobile robots, a global path planning method based on bidirectional jump point search algorithm is proposed in this paper. This new method improves the jump point filtering rules, and alternately searches the path from two directions, which greatly reduces the search time and extension nodes, and improves the safety of the robot. In order to verify the effectiveness of the algorithm, raster maps of different specifications are used for simulation experiments. The simulation results show that the path search time of bidirectional jump point search algorithm is shorter than that of jump point search algorithm, and the larger the raster map is, the more obvious the effect is. Finally, the navigation experiment is carried out in the actual mobile service robot. The experimental results show that the bidirectional jump point search algorithm reduces the path search time by about 30% compared with the jump point search algorithm, and the security is higher.









2020, 39(10): 1632-1635.
doi: 10.13433/j.cnki.1003-8728.20190302
Abstract:
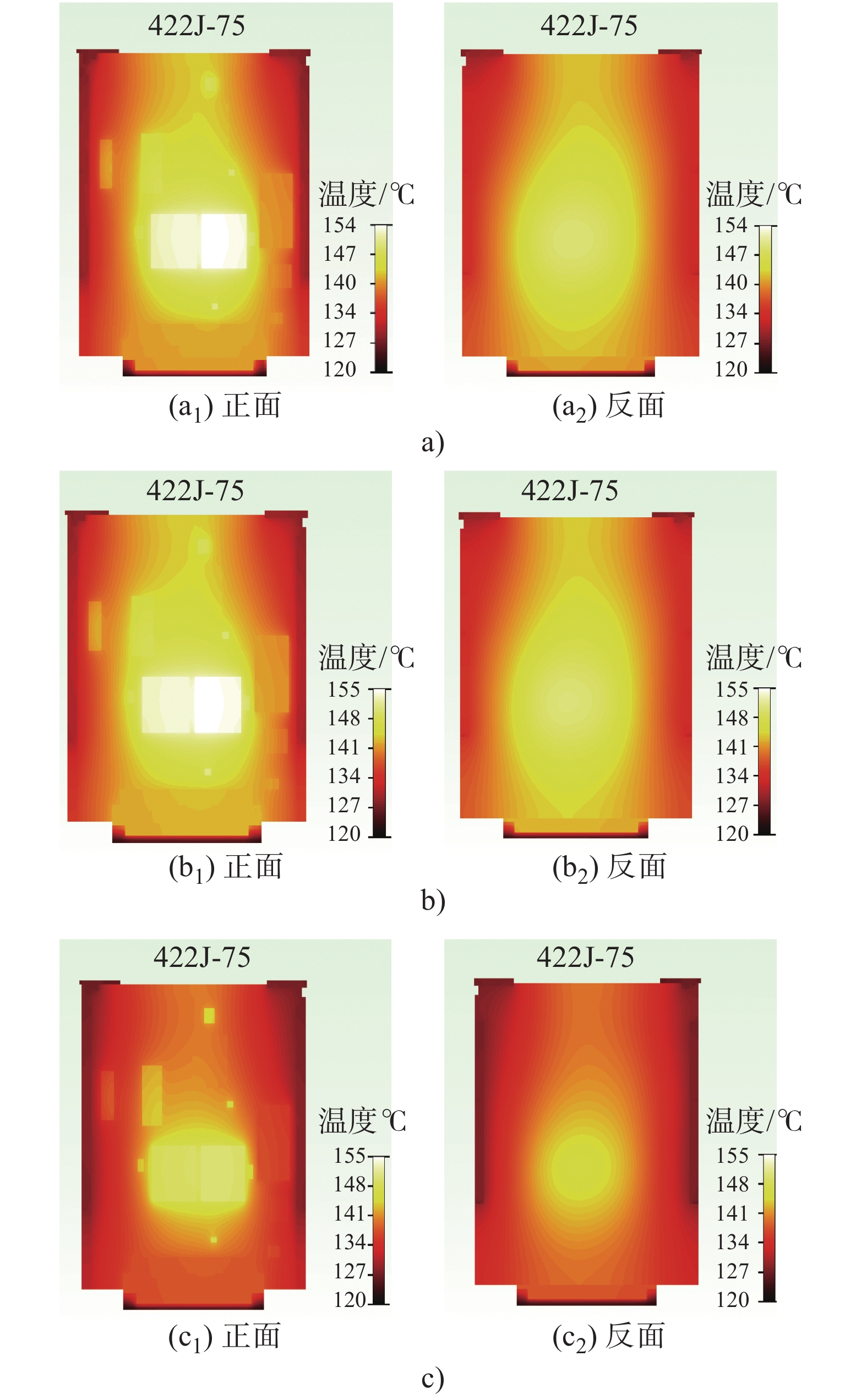
In order to find the weakness of the thermal design of the aircraft throttle controller, ensure the rationality of thermal design and product safety, the thermal simulation analysis of the throttle controller was carried out in this paper. First, the working principle and internal structure of throttle controller were introduced, the thermal model of the throttle controller was established by using FloTHERM software; then, the internal temperature field distribution of the model was analyzed when the throttle controller was located at the ground height and high altitude flight height under the condition temperature of 70 ℃ to determine the weakness part of thermal design. Through thermal simulation analysis, finally, the shortage of thermal design is pointed out, and suggestions for improvement are put forward to avoid damage due to excessive temperature.
In order to find the weakness of the thermal design of the aircraft throttle controller, ensure the rationality of thermal design and product safety, the thermal simulation analysis of the throttle controller was carried out in this paper. First, the working principle and internal structure of throttle controller were introduced, the thermal model of the throttle controller was established by using FloTHERM software; then, the internal temperature field distribution of the model was analyzed when the throttle controller was located at the ground height and high altitude flight height under the condition temperature of 70 ℃ to determine the weakness part of thermal design. Through thermal simulation analysis, finally, the shortage of thermal design is pointed out, and suggestions for improvement are put forward to avoid damage due to excessive temperature.








2020, 39(10): 1636-1640.
doi: 10.13433/j.cnki.1003-8728.20190261
Abstract:
A typical gas generator rotor structure of turbo shaft engine is introduced, aims at the large range dispersion, and the influence factors of the rotor initial unbalance is studied. Rotor vibration caused by rotor assembly or initial unbalanced of single part is calculated. The most important factor contributing to rotor vibration is the unbalance of the first disc of compressor and the second disc of turbine. Initial unbalance of those two single parts should be reduced, however it would conflict with the control of the whole gas generator rotor balance, which rely on those two discs. Through further analysis of rotor assembly influence, a method of adjusting the angle to central tie rod axis in order to strictly control the centrifugal impeller run-out in the assembly process is proposed. It makes the assembly process simple and effective, and the initial unbalance of the rotor can be quickly controlled. The present method is applicable for the rotor which tightened by a central tie rod, which has been verified in different aero-engines and by different manufacturers.
A typical gas generator rotor structure of turbo shaft engine is introduced, aims at the large range dispersion, and the influence factors of the rotor initial unbalance is studied. Rotor vibration caused by rotor assembly or initial unbalanced of single part is calculated. The most important factor contributing to rotor vibration is the unbalance of the first disc of compressor and the second disc of turbine. Initial unbalance of those two single parts should be reduced, however it would conflict with the control of the whole gas generator rotor balance, which rely on those two discs. Through further analysis of rotor assembly influence, a method of adjusting the angle to central tie rod axis in order to strictly control the centrifugal impeller run-out in the assembly process is proposed. It makes the assembly process simple and effective, and the initial unbalance of the rotor can be quickly controlled. The present method is applicable for the rotor which tightened by a central tie rod, which has been verified in different aero-engines and by different manufacturers.







