Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2019 Vol. 38, No. 2
Display Method:
2019, 38(2): 165-169.
doi: 10.13433/j.cnki.1003-8728.20180161
 PDF 889KB
PDF 889KB
Abstract:
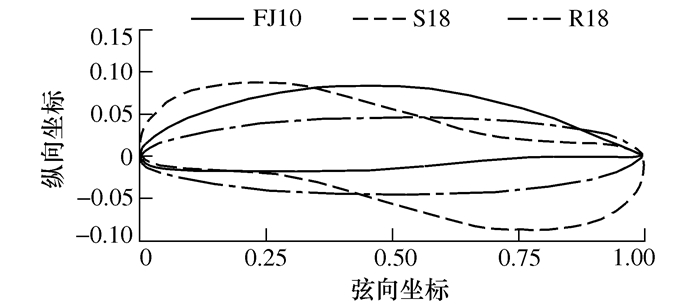
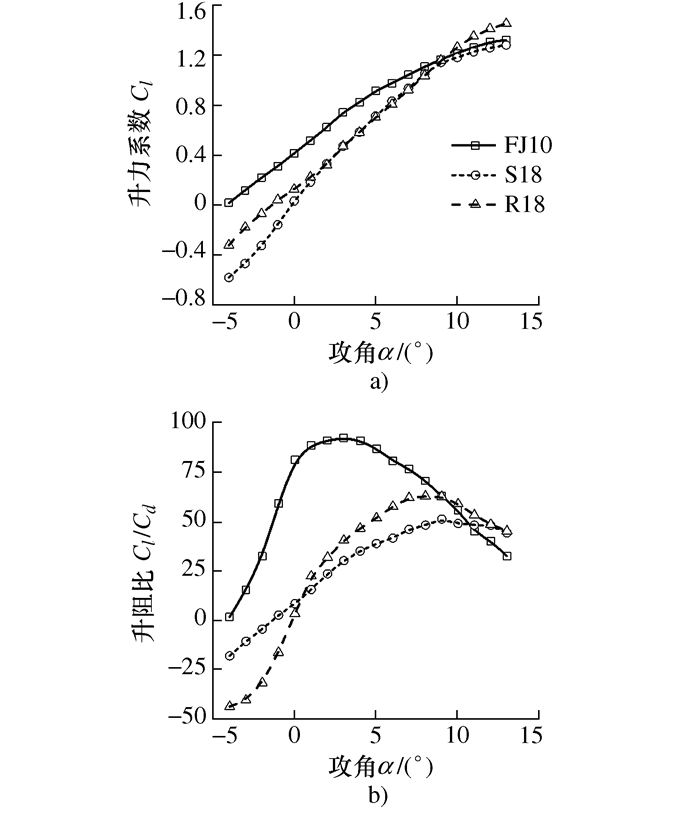
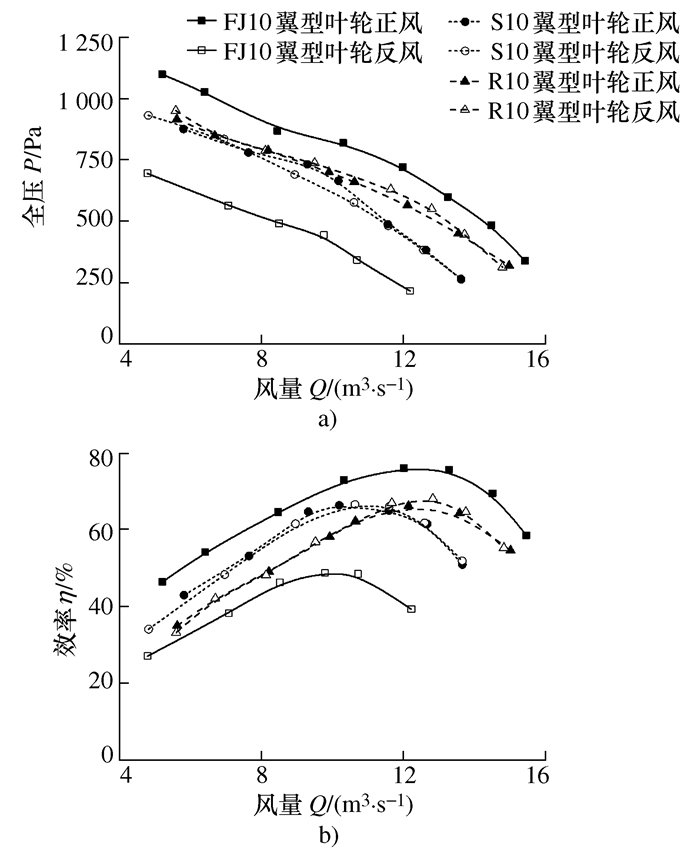
The aerodynamic performance of reversible airfoils plays an important role in the performance of the reversible air fan. Three airfoils, namely symmetrical airfoil, S type airfoil and conventional asymmetric airfoil, are selected and the aerodynamic performance of the three airfoils is solved by using X-foil software. The results show that within a large range of angle of attacks lift characteristics and lift to drag ratio characteristics of the conventional asymmetric airfoil are better than those of the other two airfoils. In order to compare the effect of the three airfoils in practical application, by adjusting the design parameters, the chord and twist for the blades designed with the three airfoils has the same change pattern. Then the aerodynamic performance tests were carried out on a standard air duct type test rig. The results show that in the selected three kinds of airfoil, the reversible fan impeller designed by the symmetrical airfoil is the most ideal one, the rated point performance of which meets the design requirements, and has good anti-wind performance. At the same time, the wind conditions have a wide range of high efficiency no matter in positive case or negative case.
The aerodynamic performance of reversible airfoils plays an important role in the performance of the reversible air fan. Three airfoils, namely symmetrical airfoil, S type airfoil and conventional asymmetric airfoil, are selected and the aerodynamic performance of the three airfoils is solved by using X-foil software. The results show that within a large range of angle of attacks lift characteristics and lift to drag ratio characteristics of the conventional asymmetric airfoil are better than those of the other two airfoils. In order to compare the effect of the three airfoils in practical application, by adjusting the design parameters, the chord and twist for the blades designed with the three airfoils has the same change pattern. Then the aerodynamic performance tests were carried out on a standard air duct type test rig. The results show that in the selected three kinds of airfoil, the reversible fan impeller designed by the symmetrical airfoil is the most ideal one, the rated point performance of which meets the design requirements, and has good anti-wind performance. At the same time, the wind conditions have a wide range of high efficiency no matter in positive case or negative case.

2019, 38(2): 170-177.
doi: 10.13433/j.cnki.1003-8728.20180154
Abstract:
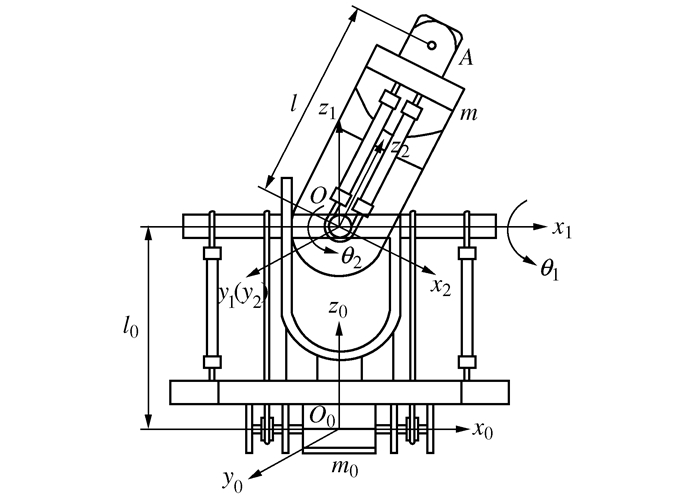
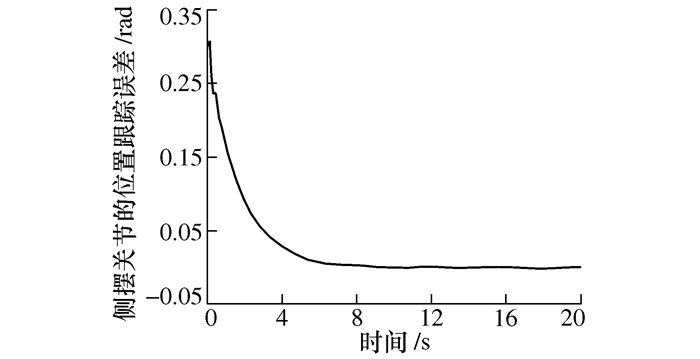
Against at the problem of accurate control in the case of heavy load of bionic robot under heavy load and the characteristics of nonlinear, time-varying, hysteresis quality in pneumatic artificial muscles (PAM), a kind of PAM and motor driving model driven bionic shoulder design is proposed according to biological inspired joints move in collaboration with muscle and bone, for improving the control precision of the bionic robot shoulder joint and driving performance. Based on the Chou model and the energy conservation theorem, the mapping model between the structural parameters of the bionic shoulder joint and the dynamic characteristics of the composite drive is derived. After establishing the dynamic model of PAM-Motor composite drive system based on Lagrange dynamics pitch motion and side swing motion, the composite driving mechanism of bionic shoulder joint is explored. The results show that PAM-Motor composite driving bionic shoulder joint possesses excellent strength, accuracy, dexterity and bearing capacity, which verify the rationality and effectiveness of the bionic shoulder joint structure.
Against at the problem of accurate control in the case of heavy load of bionic robot under heavy load and the characteristics of nonlinear, time-varying, hysteresis quality in pneumatic artificial muscles (PAM), a kind of PAM and motor driving model driven bionic shoulder design is proposed according to biological inspired joints move in collaboration with muscle and bone, for improving the control precision of the bionic robot shoulder joint and driving performance. Based on the Chou model and the energy conservation theorem, the mapping model between the structural parameters of the bionic shoulder joint and the dynamic characteristics of the composite drive is derived. After establishing the dynamic model of PAM-Motor composite drive system based on Lagrange dynamics pitch motion and side swing motion, the composite driving mechanism of bionic shoulder joint is explored. The results show that PAM-Motor composite driving bionic shoulder joint possesses excellent strength, accuracy, dexterity and bearing capacity, which verify the rationality and effectiveness of the bionic shoulder joint structure.











2019, 38(2): 178-183.
doi: 10.13433/j.cnki.1003-8728.20180166
Abstract:
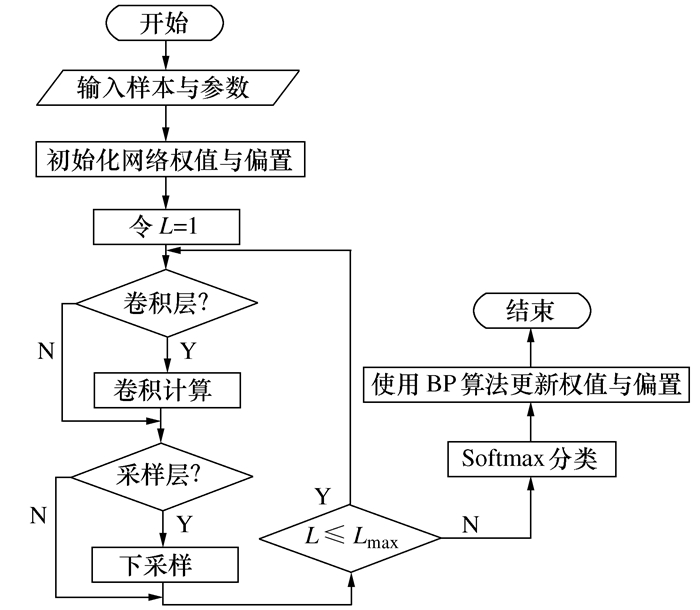
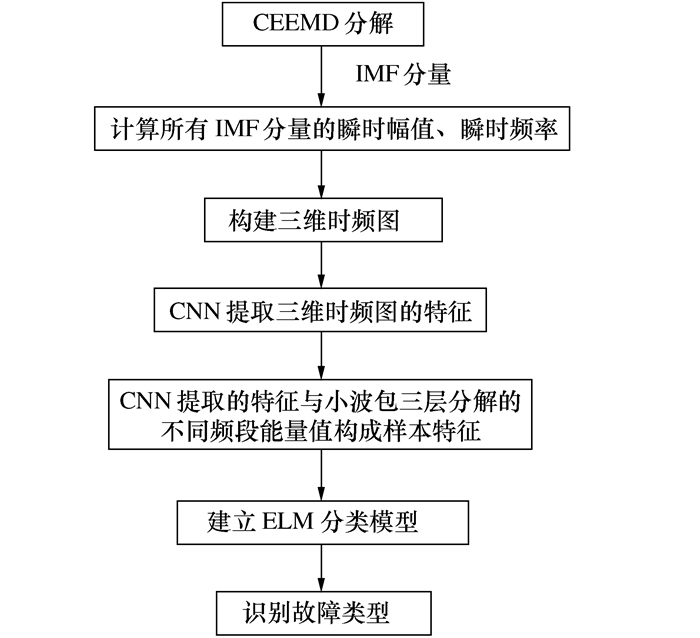
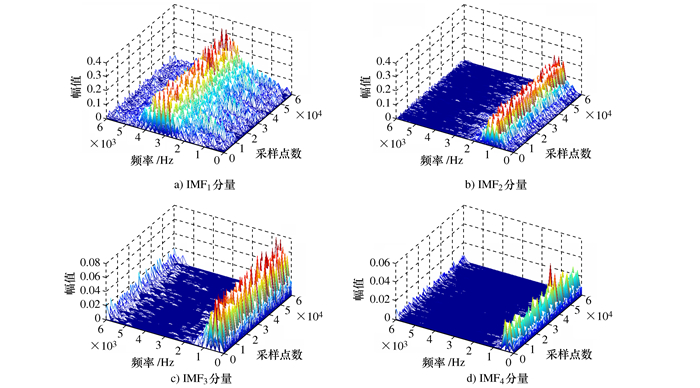
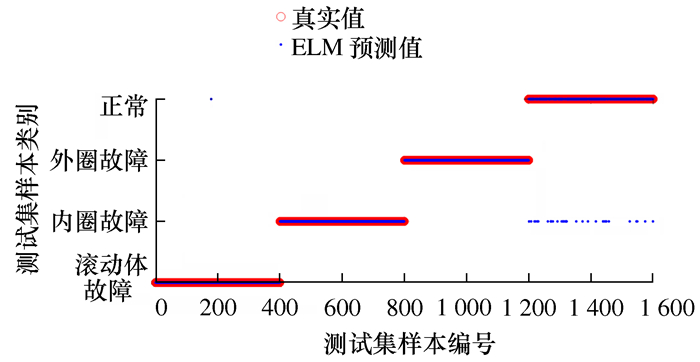
The dynamic behavior of a bearing is nonlinear, resulting in the strong nonlinear relationship between its vibration signal features and operation state. The feature extraction and selection of vibration signals often require a large amount of prior knowledge, which makes it difficult to accurately reflect different operation states for feature design. In order to solve the above problems, a feature extraction method based on Complementary Ensemble Empirical Mode Decomposition (CEEMD) algorithm and Convolutional Neural Networks (CNN) is proposed to extract sensitive features of self-adaptive vibration signals from their time-frequency diagram. These features can effectively reflect the operating status of the bearing. Firstly, the feature extraction method uses the CEEMD algorithm to obtain the Intrinsic Mode Function (IMF) components of vibration signals and then constructs each IMF time-frequency diagram; it also uses CNN to extract the features of time-frequency diagram. Secondly, it combines the extracted features with the wavelet packet frequency band energy values to form feature index vectors, which are used to build the bearing's fault diagnosis model. The experimental results show that this method can effectively improve the fault diagnosis rate.
The dynamic behavior of a bearing is nonlinear, resulting in the strong nonlinear relationship between its vibration signal features and operation state. The feature extraction and selection of vibration signals often require a large amount of prior knowledge, which makes it difficult to accurately reflect different operation states for feature design. In order to solve the above problems, a feature extraction method based on Complementary Ensemble Empirical Mode Decomposition (CEEMD) algorithm and Convolutional Neural Networks (CNN) is proposed to extract sensitive features of self-adaptive vibration signals from their time-frequency diagram. These features can effectively reflect the operating status of the bearing. Firstly, the feature extraction method uses the CEEMD algorithm to obtain the Intrinsic Mode Function (IMF) components of vibration signals and then constructs each IMF time-frequency diagram; it also uses CNN to extract the features of time-frequency diagram. Secondly, it combines the extracted features with the wavelet packet frequency band energy values to form feature index vectors, which are used to build the bearing's fault diagnosis model. The experimental results show that this method can effectively improve the fault diagnosis rate.


2019, 38(2): 184-189.
doi: 10.13433/j.cnki.1003-8728.20180146
Abstract:
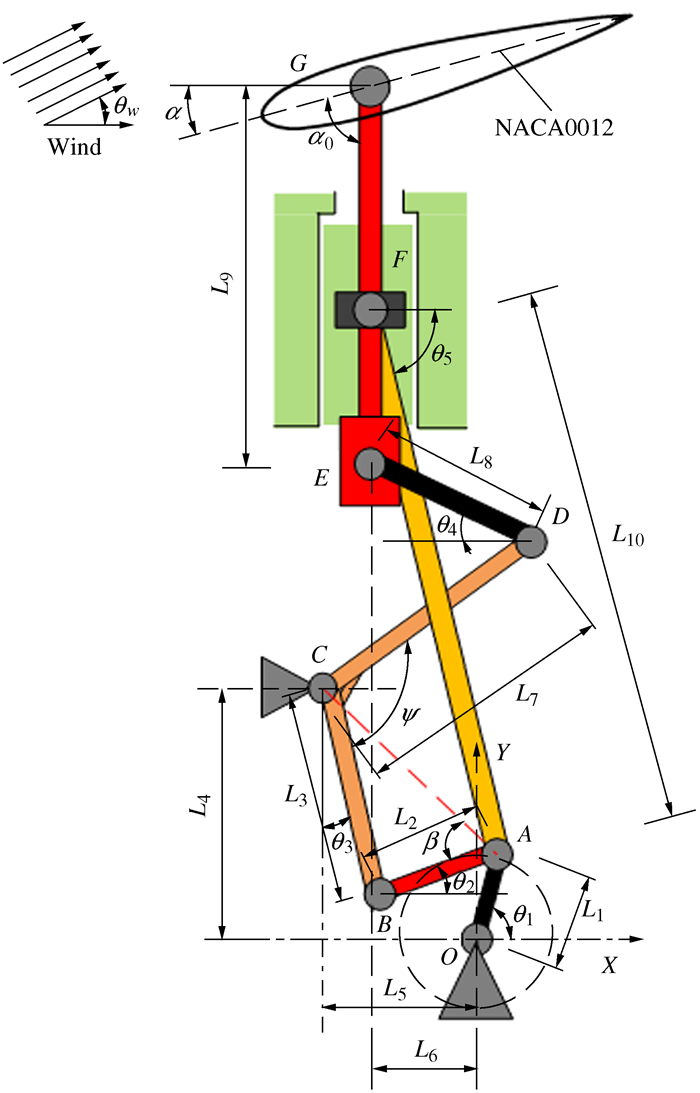
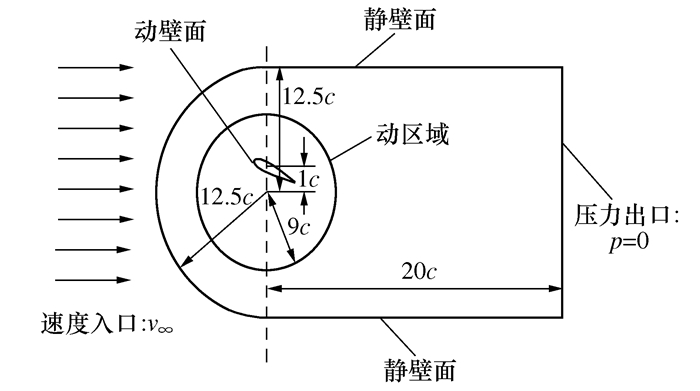
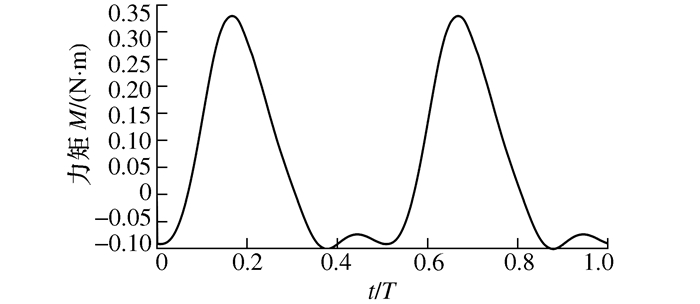
Comparing with the traditional wind turbine, the bionic flapping wing wind generator with the advantages of low noise, low star-up wind speed, small environmental impact and wind energy capture efficiency higher, has gradually been known and valued, and which has important research value. In this paper, a prototype of the reciprocating oscillatory flapping wing wind generator based on the bionics principle is designed, and by using the theoretical analysis and numerical calculation methods, the relationship between the lift force, the drag force and the output torque is analyzed, the results show that mean value of output torque is positive in a period of motion, which can effectively convert the reciprocating linear motion of flapping wing into the rotation motion of the generator motor.
Comparing with the traditional wind turbine, the bionic flapping wing wind generator with the advantages of low noise, low star-up wind speed, small environmental impact and wind energy capture efficiency higher, has gradually been known and valued, and which has important research value. In this paper, a prototype of the reciprocating oscillatory flapping wing wind generator based on the bionics principle is designed, and by using the theoretical analysis and numerical calculation methods, the relationship between the lift force, the drag force and the output torque is analyzed, the results show that mean value of output torque is positive in a period of motion, which can effectively convert the reciprocating linear motion of flapping wing into the rotation motion of the generator motor.






2019, 38(2): 190-197.
doi: 10.13433/j.cnki.1003-8728.20180151
Abstract:
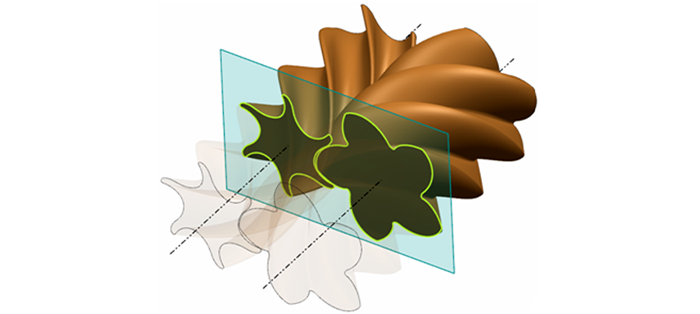
A screw rotor is the core of a twin screw compressor, but the construction degree of the traditional rule curve cannot meet the design requirements of the screw rotor profile. Therefore, this paper proposes using the free curve to replace the traditional rule curve so as to obtain the profile with a higher degree of freedom and curve continuity. The design of the rotor curve of the free curve is studied deeply, and the control point of the regular curve and its weighting factor are obtained through geometric analysis. The control point determines the typical curve design with the free curve, the weight factor and the node vector, thus reducing the steps of the traditional segmental design line and greatly improving design efficiency. In this paper, the free curve lines with continuous curves G0, G1 and G2 are designed by controlling the end point vector of a profile segment. The curvature change rule is studied by using various numbers of control points and various powers, and a smooth curvature and the profile whose error is less than 0.1μm are obtained.
A screw rotor is the core of a twin screw compressor, but the construction degree of the traditional rule curve cannot meet the design requirements of the screw rotor profile. Therefore, this paper proposes using the free curve to replace the traditional rule curve so as to obtain the profile with a higher degree of freedom and curve continuity. The design of the rotor curve of the free curve is studied deeply, and the control point of the regular curve and its weighting factor are obtained through geometric analysis. The control point determines the typical curve design with the free curve, the weight factor and the node vector, thus reducing the steps of the traditional segmental design line and greatly improving design efficiency. In this paper, the free curve lines with continuous curves G0, G1 and G2 are designed by controlling the end point vector of a profile segment. The curvature change rule is studied by using various numbers of control points and various powers, and a smooth curvature and the profile whose error is less than 0.1μm are obtained.










2019, 38(2): 198-204.
doi: 10.13433/j.cnki.1003-8728.20180148
Abstract:
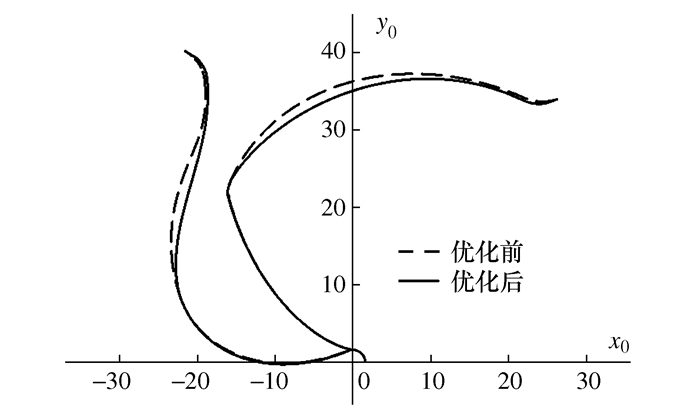
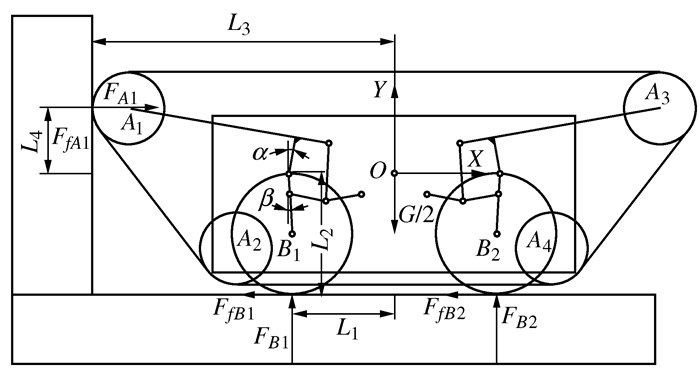
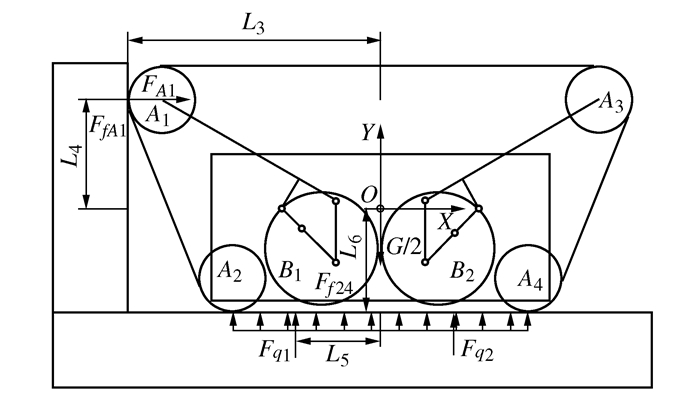
Aiming at the unstructured environment with narrow terrain and higher obstacle, a passive adaptive robot is proposed for the forward and reverse cross obstacle. The robot consists of the body module, the tail wheel module and the left and right two symmetrical arrangements of the wheel-track complex module. The overall structure and mode conversion principle of the robot are briefly introduced, and its power transmission process and motion process are introduced in detail. Through establishing the mathematical model of the robot wheel-track compound module, the motion relation of each component is analyzed, the mode conversion process and force condition of the wheel-track module is studied, and the change of the track length during the deformation process of the wheel-track complex module is obtained. The analysis results verify the rationality of parameter design and the feasibility of the scheme.
Aiming at the unstructured environment with narrow terrain and higher obstacle, a passive adaptive robot is proposed for the forward and reverse cross obstacle. The robot consists of the body module, the tail wheel module and the left and right two symmetrical arrangements of the wheel-track complex module. The overall structure and mode conversion principle of the robot are briefly introduced, and its power transmission process and motion process are introduced in detail. Through establishing the mathematical model of the robot wheel-track compound module, the motion relation of each component is analyzed, the mode conversion process and force condition of the wheel-track module is studied, and the change of the track length during the deformation process of the wheel-track complex module is obtained. The analysis results verify the rationality of parameter design and the feasibility of the scheme.











2019, 38(2): 205-210.
doi: 10.13433/j.cnki.1003-8728.20180322
Abstract:
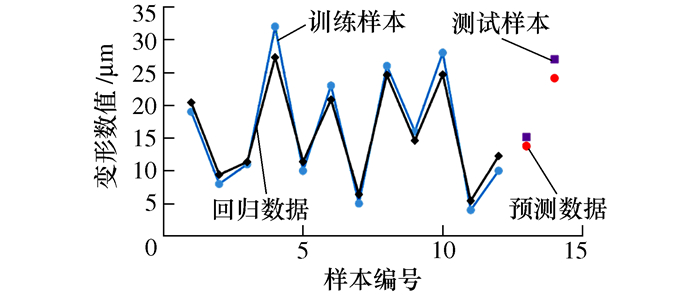
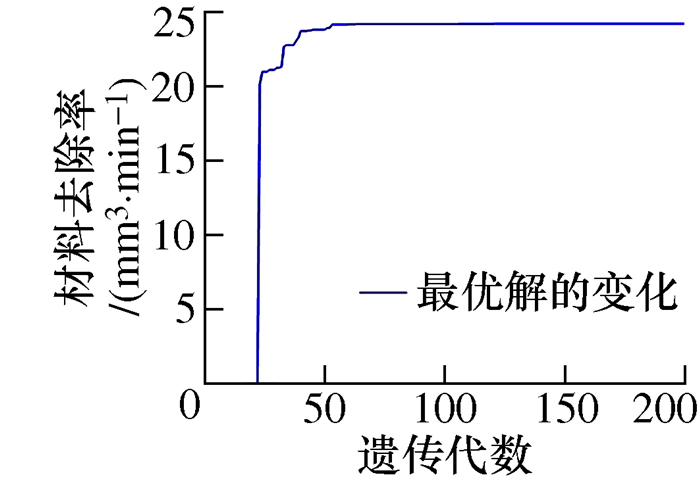
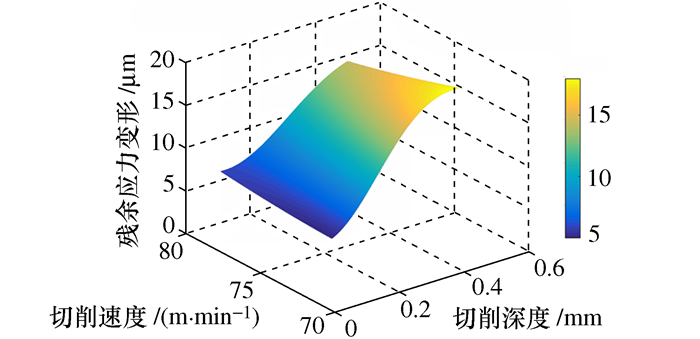
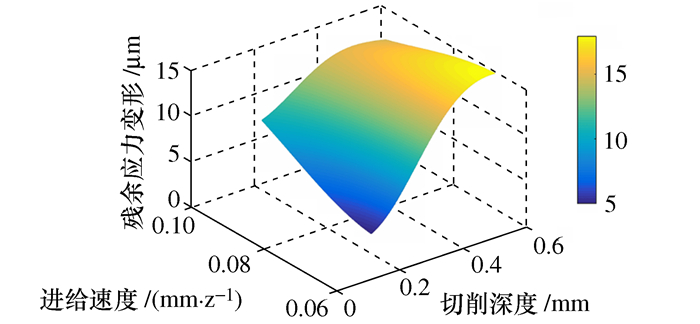
The prediction method of deformation induced by residual stress in milling of thin-walled parts was studied. Based on the above-mentioned, the cutting parameters were optimized. Firstly, the simulation method of deformation induced by residual stress was proposed based on the mapping of working conditions and the application of machining residual stress fields. The experimental results show that this method can effectively predict the deformation induced by using the machining residual stress of thin-walled parts. On this basis, the prediction model for deformation based on the cutting parameters was established by using the support vector regression algorithm. Then, on the basis of the present prediction model, a genetic algorithm was adopted to optimize the cutting parameters with the deformation induced by residual stress as the constraint and the maximum processing efficiency as the optimization objective. The analysis of results indicates that the optimization method presented in the paper could optimized the cutting parameters.
The prediction method of deformation induced by residual stress in milling of thin-walled parts was studied. Based on the above-mentioned, the cutting parameters were optimized. Firstly, the simulation method of deformation induced by residual stress was proposed based on the mapping of working conditions and the application of machining residual stress fields. The experimental results show that this method can effectively predict the deformation induced by using the machining residual stress of thin-walled parts. On this basis, the prediction model for deformation based on the cutting parameters was established by using the support vector regression algorithm. Then, on the basis of the present prediction model, a genetic algorithm was adopted to optimize the cutting parameters with the deformation induced by residual stress as the constraint and the maximum processing efficiency as the optimization objective. The analysis of results indicates that the optimization method presented in the paper could optimized the cutting parameters.








2019, 38(2): 211-217.
doi: 10.13433/j.cnki.1003-8728.20180160
Abstract:
To achieve high efficiency machining of gear face and tiny chamfer, an abrasive belt grinding device suitable for the gear face was developed and combined with the new open-type abrasive belt grinding scheme and characteristics. The grinding device is flexible and adaptable for grinding abrasive belt and can be accurately control the tiny chamfering dimensions of the end edge through adjusting grinding parameters. The grinding device adopts the reciprocal oscillation mode of a contact wheel to improve the consistence of abrasive wear height. Experimental results prove that the grinding device is feasible and stable for precision grinding. The grinding parameters were optimized to obtain the best gear face quality and chamfer size; the gear face roughness is kept below 0.05 μm, and the small size of the chamfer meets the given size range requirements in different edge positions.
To achieve high efficiency machining of gear face and tiny chamfer, an abrasive belt grinding device suitable for the gear face was developed and combined with the new open-type abrasive belt grinding scheme and characteristics. The grinding device is flexible and adaptable for grinding abrasive belt and can be accurately control the tiny chamfering dimensions of the end edge through adjusting grinding parameters. The grinding device adopts the reciprocal oscillation mode of a contact wheel to improve the consistence of abrasive wear height. Experimental results prove that the grinding device is feasible and stable for precision grinding. The grinding parameters were optimized to obtain the best gear face quality and chamfer size; the gear face roughness is kept below 0.05 μm, and the small size of the chamfer meets the given size range requirements in different edge positions.









2019, 38(2): 218-223.
doi: 10.13433/j.cnki.1003-8728.20180156
Abstract:
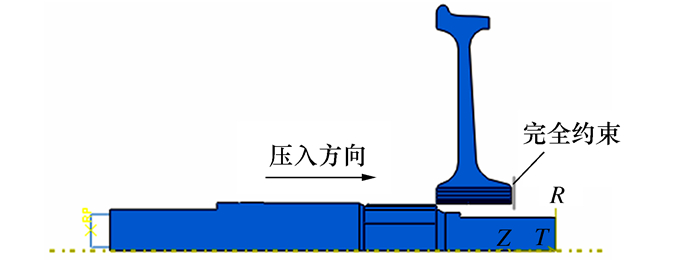
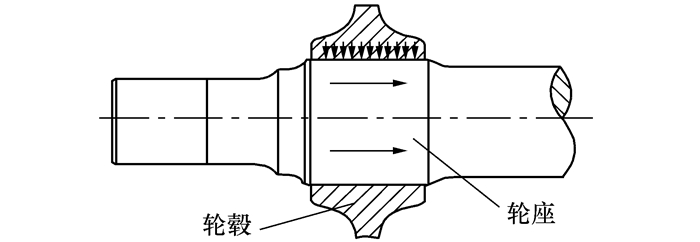
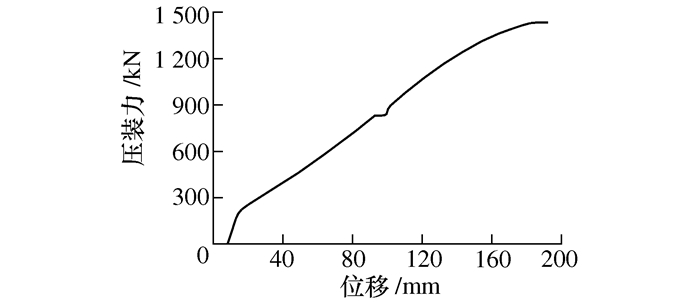
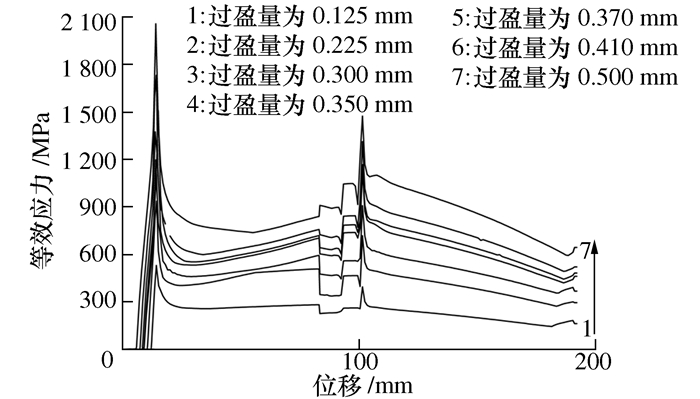
In order to improve the qualification rate of wheelset in the pressing process of wheel-shaft, the dynamic finite element models for wheel-shaft pressing process based on the experimental data and different reference standards have been established via ABAQUS software. And the pressing force and equivalent stress on the contact surface between the wheel seat and the wheel hub bore have been analyzed. The results are as follows. In the pressing process of wheel-shaft, the interference between the wheel seat and the hub bore has a great influence on the fitting result. It is proposed that pressing is proceeded according to the range of interference in china railway standard, and the qualification pressing ratecould be improved. The changing rules of the equivalent stress between the wheel and the shaft in the pressing process and the equivalent stress distribution after the process have been comprehensively analyzed. And the location of the stress concentration is summed up, which provides a reference for the flaw detection of wheel and shaft.
In order to improve the qualification rate of wheelset in the pressing process of wheel-shaft, the dynamic finite element models for wheel-shaft pressing process based on the experimental data and different reference standards have been established via ABAQUS software. And the pressing force and equivalent stress on the contact surface between the wheel seat and the wheel hub bore have been analyzed. The results are as follows. In the pressing process of wheel-shaft, the interference between the wheel seat and the hub bore has a great influence on the fitting result. It is proposed that pressing is proceeded according to the range of interference in china railway standard, and the qualification pressing ratecould be improved. The changing rules of the equivalent stress between the wheel and the shaft in the pressing process and the equivalent stress distribution after the process have been comprehensively analyzed. And the location of the stress concentration is summed up, which provides a reference for the flaw detection of wheel and shaft.








2019, 38(2): 224-229.
doi: 10.13433/j.cnki.1003-8728.20180155
Abstract:
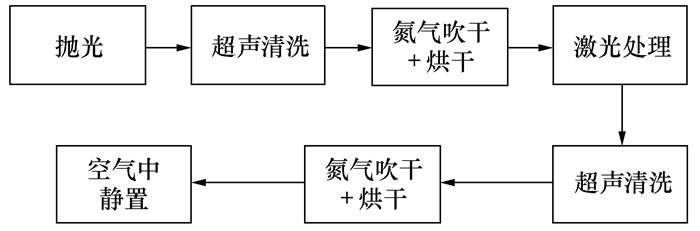
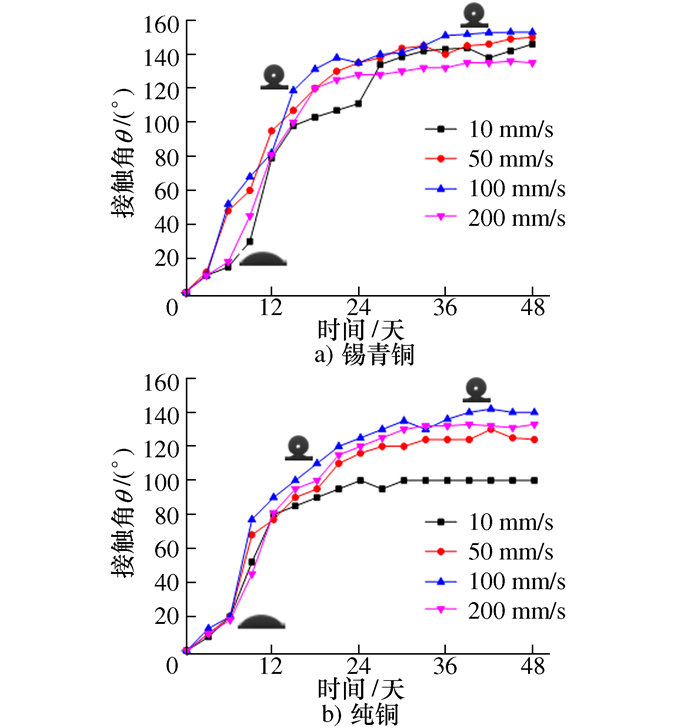
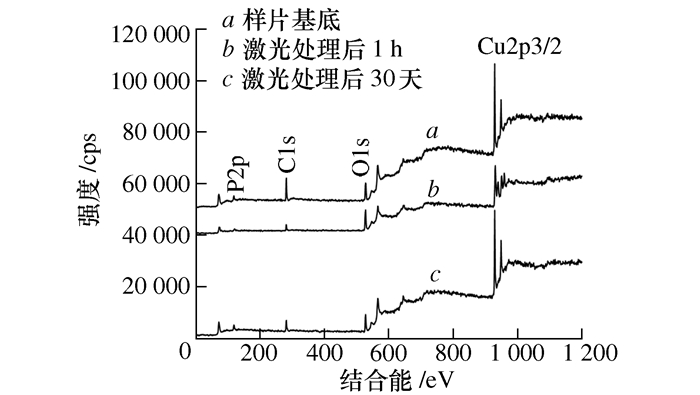
This paper presents the preparation of the tin bronze substrate superhydrophobic metallic surface with the nanosecond ultraviolet(UV)laser instead of femtosecond laser. The surfaces with different microstructures were prepared by changing laser processing parameters. The microstructure and wettability of the prepared surfaces have been characterized by the scanning electron microscopy and the contact angle measurement system. The content of chemical elements in the prepared surfaces have been analyzed by using the X-ray photoelectron spectroscopy. On this basis, the mechanisms of change in the wettability on the prepared surfaces over time is explained. The analysis results show that the superhydrophobic metallic surfaces on the tin bronze substrate should be prepared, using the nanosecond UV laser similar to the femtosecond laser. The wettability on the laser processed surfaces changes over time and the mechanisms of wettability change are due to the fact that the CuO formed during laser processing has been transformed to Cu2O under the catalytic deoxygenation of the phosphorus element in the tin bronze. With the UV laser energy density of 5.61 J/cm2 and the laser scanning speed of 100 mm/s, the static contact angle on the prepared metallic surface with dual scale micro-nanostructures is more than 150° and the contact angle hysteresis is less than 10°.
This paper presents the preparation of the tin bronze substrate superhydrophobic metallic surface with the nanosecond ultraviolet(UV)laser instead of femtosecond laser. The surfaces with different microstructures were prepared by changing laser processing parameters. The microstructure and wettability of the prepared surfaces have been characterized by the scanning electron microscopy and the contact angle measurement system. The content of chemical elements in the prepared surfaces have been analyzed by using the X-ray photoelectron spectroscopy. On this basis, the mechanisms of change in the wettability on the prepared surfaces over time is explained. The analysis results show that the superhydrophobic metallic surfaces on the tin bronze substrate should be prepared, using the nanosecond UV laser similar to the femtosecond laser. The wettability on the laser processed surfaces changes over time and the mechanisms of wettability change are due to the fact that the CuO formed during laser processing has been transformed to Cu2O under the catalytic deoxygenation of the phosphorus element in the tin bronze. With the UV laser energy density of 5.61 J/cm2 and the laser scanning speed of 100 mm/s, the static contact angle on the prepared metallic surface with dual scale micro-nanostructures is more than 150° and the contact angle hysteresis is less than 10°.




2019, 38(2): 230-236.
doi: 10.13433/j.cnki.1003-8728.20180162
Abstract:
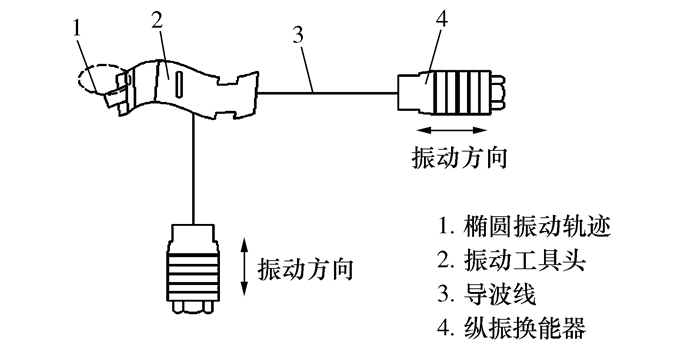
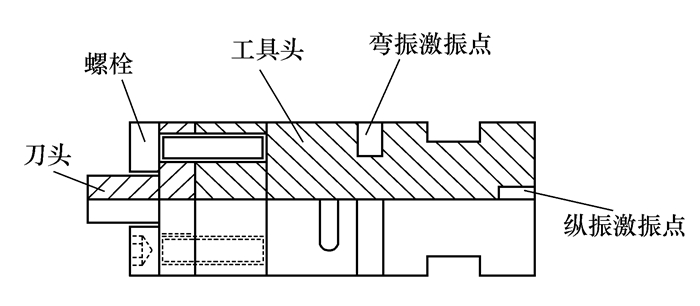
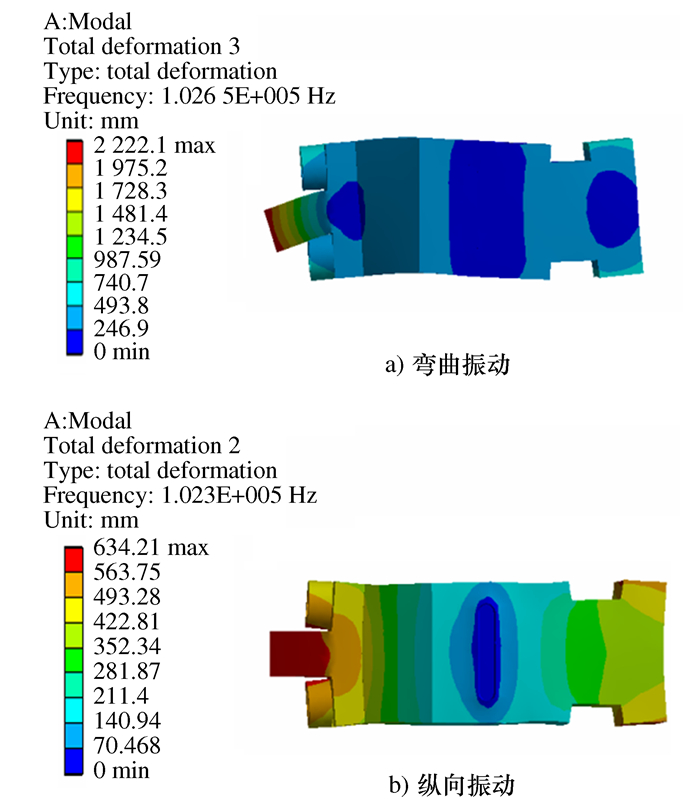
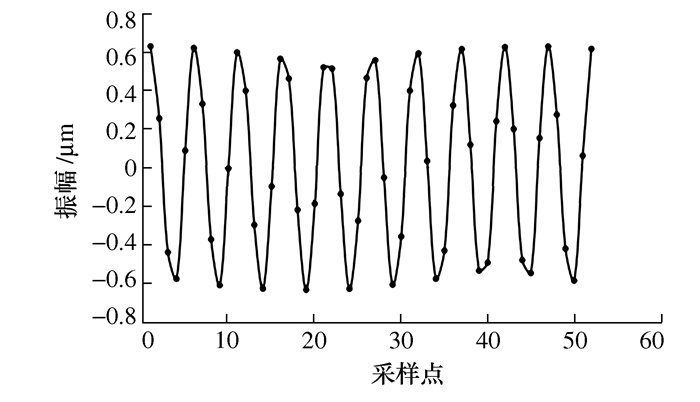
To simplify the structure of two-dimensional ultrasound elliptical vibration and improve the vibration response accuracy of the tool nose, a high frequency two-dimensional vibration device using guided wave line to conduct ultrasonic vibration is designed by the unidirectional dynamic stiffness characteristics of guided waves. The device consists of the 101.96 kHz longitudinal vibration transducer and the longitudinal-bend compound vibration tool fixture, and the guided wave line is used to connect the transducer to the vibration tool fixture. The two-dimensional vibration trajectory can be obtained through adjusting the output phase difference of the two excitation power supplies. The optimal structure of the device is finally determined by finite element modal analysis. The vibration characteristics of the two-dimensional vibration device are detected, and the test result shows that the tool nose at the front of vibration tool fixture can produce 0.4um amplitude of longitudinal-bend compound vibration. The device can be applied to ultra-precision cutting such as those requiring high-precision or difficult-to-process components in aerospace, military, electronics and optics processing.
To simplify the structure of two-dimensional ultrasound elliptical vibration and improve the vibration response accuracy of the tool nose, a high frequency two-dimensional vibration device using guided wave line to conduct ultrasonic vibration is designed by the unidirectional dynamic stiffness characteristics of guided waves. The device consists of the 101.96 kHz longitudinal vibration transducer and the longitudinal-bend compound vibration tool fixture, and the guided wave line is used to connect the transducer to the vibration tool fixture. The two-dimensional vibration trajectory can be obtained through adjusting the output phase difference of the two excitation power supplies. The optimal structure of the device is finally determined by finite element modal analysis. The vibration characteristics of the two-dimensional vibration device are detected, and the test result shows that the tool nose at the front of vibration tool fixture can produce 0.4um amplitude of longitudinal-bend compound vibration. The device can be applied to ultra-precision cutting such as those requiring high-precision or difficult-to-process components in aerospace, military, electronics and optics processing.








2019, 38(2): 237-243.
doi: 10.13433/j.cnki.1003-8728.20180149
Abstract:
Tolerance design depends on an experience of designers for its lack of guidance of scientific design theory. Product tolerance design was usually a multi-functional requirements design. There was often a coupling between functional requirements, and it needs to be analyzed and decoupled. Because there existed different solution strategies, it needed to determine the best solution to solve the function equations, which were established to meet the geometrical functional requirements. In view of these problems, the theory of axiomatic design was firstly introduced to the field of tolerance design. The tolerance design process was seen as mapping from function domain to dimensions and tolerances domain. The independent axiom and information axiom were used for understanding and analyzing the tolerance design, which can improve its scientific meaning of tolerance design. Secondly, the bearing seat assembly was taken as an example to explain the solution of the tolerance decoupling design by using the independence axiom. Finally, the decoupling design and the solving sequence of tolerance allocation of gear assembly are taken as an example to explain the application of independence axiom and information axiom. It shows that the introduction of axiomatic design can provide a framework and mechanism for gradually decomposing the tolerance design, and assist in judging and solving coupling design problems. It provides a useful inspiration for tolerance design theory from experience design to scientific design.
Tolerance design depends on an experience of designers for its lack of guidance of scientific design theory. Product tolerance design was usually a multi-functional requirements design. There was often a coupling between functional requirements, and it needs to be analyzed and decoupled. Because there existed different solution strategies, it needed to determine the best solution to solve the function equations, which were established to meet the geometrical functional requirements. In view of these problems, the theory of axiomatic design was firstly introduced to the field of tolerance design. The tolerance design process was seen as mapping from function domain to dimensions and tolerances domain. The independent axiom and information axiom were used for understanding and analyzing the tolerance design, which can improve its scientific meaning of tolerance design. Secondly, the bearing seat assembly was taken as an example to explain the solution of the tolerance decoupling design by using the independence axiom. Finally, the decoupling design and the solving sequence of tolerance allocation of gear assembly are taken as an example to explain the application of independence axiom and information axiom. It shows that the introduction of axiomatic design can provide a framework and mechanism for gradually decomposing the tolerance design, and assist in judging and solving coupling design problems. It provides a useful inspiration for tolerance design theory from experience design to scientific design.




2019, 38(2): 244-252.
doi: 10.13433/j.cnki.1003-8728.20180038
Abstract:
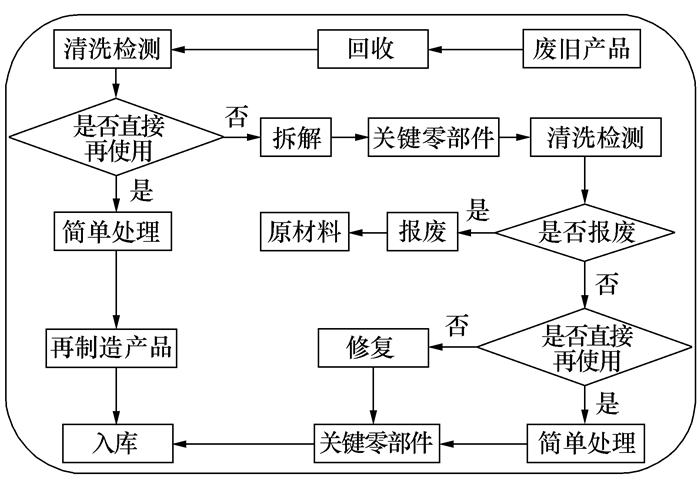
Remanufacturing evaluation is design basis of green remanufacturing engineering, and it is precondition of remanufacturing and key problem in remanufacturing research. In order to evaluate the remanufacturability of machine parts and determine whether it is suitable for remanufacturing, the remanufacturability evaluation model based on Analytic Hierarchy Process was proposed, in which the remanufacturing relative machining index was taken as target level. The model established remanufacturing evaluation index system and quantitative method covering three aspects of technology, cost and environment, and determined the weight of each evaluation index according to Analytic Hierarchy Process, and figured out the remanufacturing relative machining index. The proposed model was illustrated in a case of a diesel engine crankshaft, and the result showed the better remanufacturability of this diesel engine crankshaft.
Remanufacturing evaluation is design basis of green remanufacturing engineering, and it is precondition of remanufacturing and key problem in remanufacturing research. In order to evaluate the remanufacturability of machine parts and determine whether it is suitable for remanufacturing, the remanufacturability evaluation model based on Analytic Hierarchy Process was proposed, in which the remanufacturing relative machining index was taken as target level. The model established remanufacturing evaluation index system and quantitative method covering three aspects of technology, cost and environment, and determined the weight of each evaluation index according to Analytic Hierarchy Process, and figured out the remanufacturing relative machining index. The proposed model was illustrated in a case of a diesel engine crankshaft, and the result showed the better remanufacturability of this diesel engine crankshaft.




2019, 38(2): 253-259.
doi: 10.13433/j.cnki.1003-8728.20180153
Abstract:
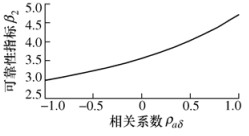
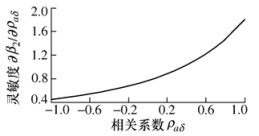
Based on the perturbation theory, the reliability sensitivity formula about the mean value, variance, covariance of rotor system's random variables and the correlation coefficients between rotor system's random variables under two failure modes, which are skidding on interference fit mating surface and plastic deformation, are deduced. By using an example, the influence of the mean value, variance, covariance of random variables and the correlation coefficients between random variables, which are related to the design of interference fit between the spindle of electric spindle and its inner rotor, on structural reliability is discussed, and through sorting the importance of mean value of the size parameters affecting the reliability of the system, it is concluded that the mean value of the actual interference amount is the most sensitive parameter that affects the reliability. The genetic algorithm is applied to the one-dimensional unconstrained optimization of the mean value of the actual interference amount of the matching surface, and the reliability of the system is improved after the parameter optimization.
Based on the perturbation theory, the reliability sensitivity formula about the mean value, variance, covariance of rotor system's random variables and the correlation coefficients between rotor system's random variables under two failure modes, which are skidding on interference fit mating surface and plastic deformation, are deduced. By using an example, the influence of the mean value, variance, covariance of random variables and the correlation coefficients between random variables, which are related to the design of interference fit between the spindle of electric spindle and its inner rotor, on structural reliability is discussed, and through sorting the importance of mean value of the size parameters affecting the reliability of the system, it is concluded that the mean value of the actual interference amount is the most sensitive parameter that affects the reliability. The genetic algorithm is applied to the one-dimensional unconstrained optimization of the mean value of the actual interference amount of the matching surface, and the reliability of the system is improved after the parameter optimization.







2019, 38(2): 260-264.
doi: 10.13433/j.cnki.1003-8728.20180157
Abstract:
The support vector machine (SVM) has been widely used for classification and discrimination, but the traditional SVM only considers the maximum distance between different data classes. To diagnose the fault of a complex and diverse analog circuit, this paper uses the manifold SVM based particle swarm optimization to ensure that the data mapped in the feature space can maintain the manifold structure of the original space while ensuring the maximum interval between different data classes. At the same time, the particle swarm optimization is used to optimize the weight parameters of the SVM, so that the fault diagnosis rate can be improved by 2%~6% compared with the traditional SVM. The experimental results show that this method effectively enhances the accuracy of analog circuit fault diagnosis.
The support vector machine (SVM) has been widely used for classification and discrimination, but the traditional SVM only considers the maximum distance between different data classes. To diagnose the fault of a complex and diverse analog circuit, this paper uses the manifold SVM based particle swarm optimization to ensure that the data mapped in the feature space can maintain the manifold structure of the original space while ensuring the maximum interval between different data classes. At the same time, the particle swarm optimization is used to optimize the weight parameters of the SVM, so that the fault diagnosis rate can be improved by 2%~6% compared with the traditional SVM. The experimental results show that this method effectively enhances the accuracy of analog circuit fault diagnosis.

2019, 38(2): 265-270.
doi: 10.13433/j.cnki.1003-8728.20180301
Abstract:
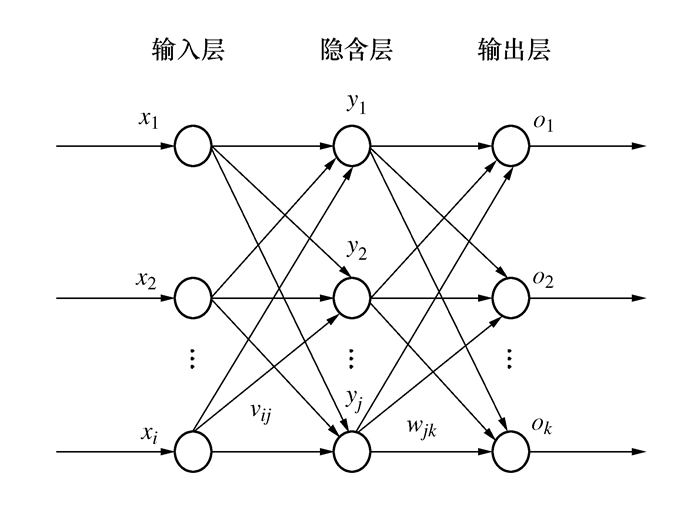
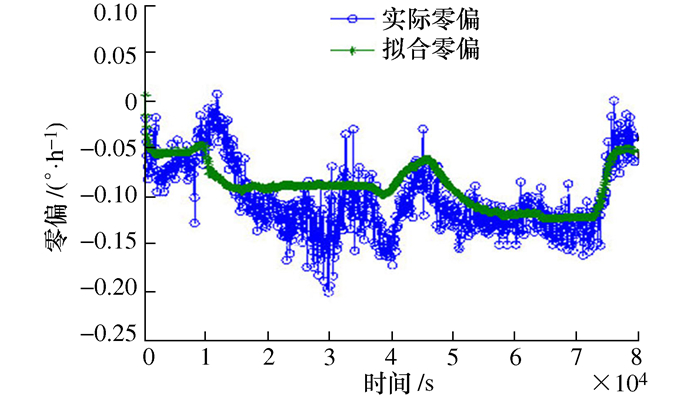
The optical path of the prism ring laser gyro is different from that of the conventional reflective laser gyro in that quite long optical path is through the prism. The change of temperature is an important factor affecting the output precision. In this paper, the influence mechanism of temperature, temperature changing rate and temperature gradient on the laser gyros is studied. The two-order model of zero bias and the three-order model of the calibration factor of laser gyro under temperature variation are deduced. The calibration scheme of temperature error is designed, and the calibration experiment is carried out. Two methods of stepwise regression analysis and BP neural networks are used to identify the parameters of the temperature error model, and the effectiveness of the two methods is proved by the temperature error compensation.
The optical path of the prism ring laser gyro is different from that of the conventional reflective laser gyro in that quite long optical path is through the prism. The change of temperature is an important factor affecting the output precision. In this paper, the influence mechanism of temperature, temperature changing rate and temperature gradient on the laser gyros is studied. The two-order model of zero bias and the three-order model of the calibration factor of laser gyro under temperature variation are deduced. The calibration scheme of temperature error is designed, and the calibration experiment is carried out. Two methods of stepwise regression analysis and BP neural networks are used to identify the parameters of the temperature error model, and the effectiveness of the two methods is proved by the temperature error compensation.






2019, 38(2): 271-276.
doi: 10.13433/j.cnki.1003-8728.20180171
Abstract:
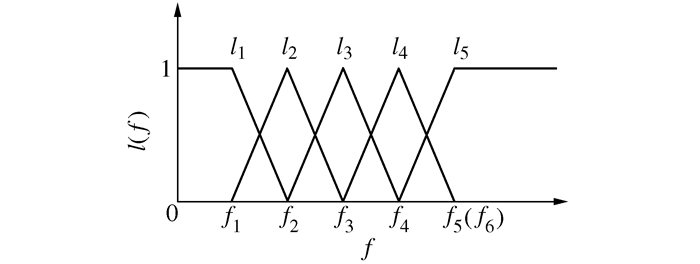
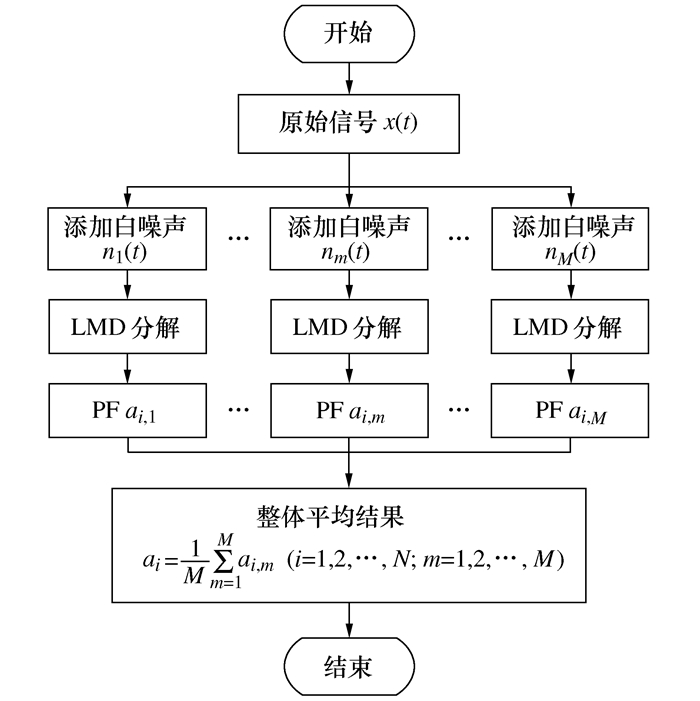
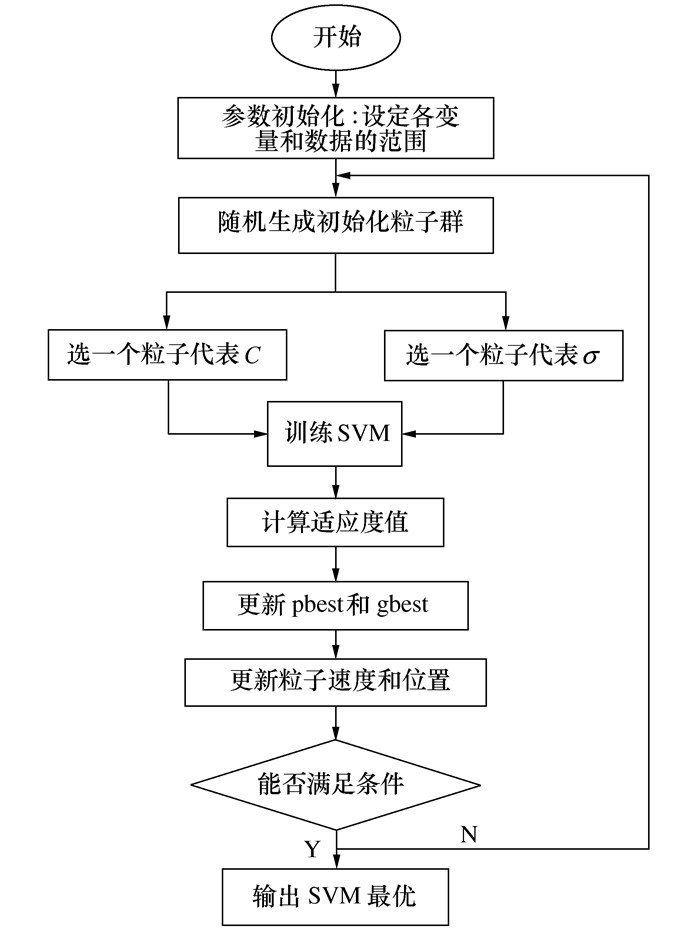
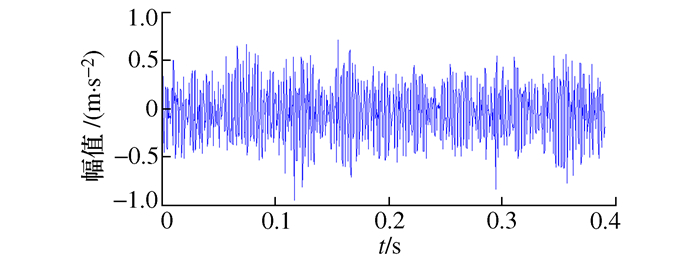
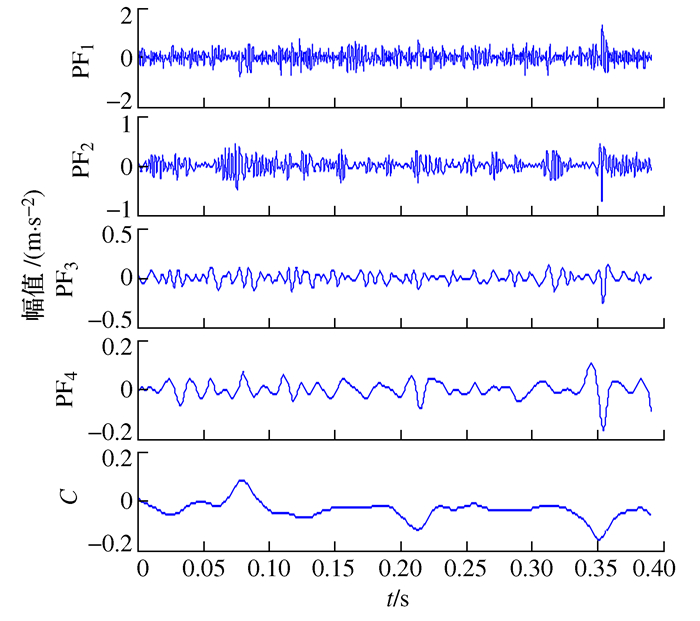
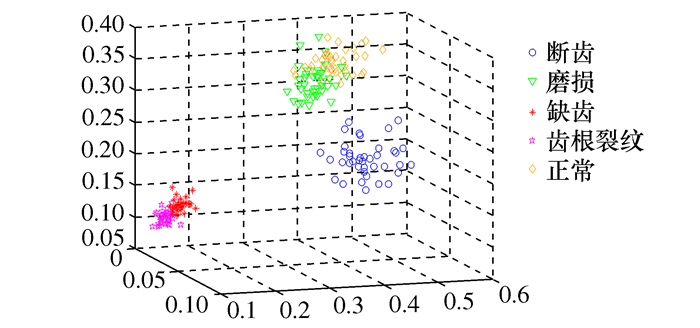
A gear fault diagnosis method based on ELMD entropy feature fusion and PSO-SVM is proposed in this paper. Firstly, the original signal is decomposed by ensemble local mean decomposition (ELMD), and several product functions (PF) are obtained. Secondly, the energy entropy and approximate entropy of the first five PF components obtained by ELMD decomposition were obtained and characterized by KPCA. Then, some of the fusion features are selected as training samples, the rest as test samples; finally, the PSO-optimized support vector machine is used to train and test the fusion feature samples. In the experiment, the singular and fusion features are compared with the recognition accuracy of SVM and PSO-SVM respectively. Experimental results show that the proposed method can be effectively applied in gear fault diagnosis.
A gear fault diagnosis method based on ELMD entropy feature fusion and PSO-SVM is proposed in this paper. Firstly, the original signal is decomposed by ensemble local mean decomposition (ELMD), and several product functions (PF) are obtained. Secondly, the energy entropy and approximate entropy of the first five PF components obtained by ELMD decomposition were obtained and characterized by KPCA. Then, some of the fusion features are selected as training samples, the rest as test samples; finally, the PSO-optimized support vector machine is used to train and test the fusion feature samples. In the experiment, the singular and fusion features are compared with the recognition accuracy of SVM and PSO-SVM respectively. Experimental results show that the proposed method can be effectively applied in gear fault diagnosis.




2019, 38(2): 277-282.
doi: 10.13433/j.cnki.1003-8728.20180288
Abstract:
Aiming at the road obstacle detection, the obstacle probability detection algorithm based on the stereo vision and superpixel technology is proposed. Firstly, the disparity map was obtained by using stereo matching on the left and right images captured by using binocular cameras, and the 3D point cloud was reconstructed. Then the least square method was used to estimate the ground plane equation and calculate the distance from the image space point to the ground plane. After that, the superpixels were obtained by using SLIC algorithm, and the median distance of the superpixels to the ground plane were calculated. Finally, the probability of the pixel being an obstacle was calculated by using the logistic regression method and the belief function. The experimental results show that the present method can detect road obstacles reliably and provide the valuable probabilistic data for multi-sensor fusion methods of obstacle detection.
Aiming at the road obstacle detection, the obstacle probability detection algorithm based on the stereo vision and superpixel technology is proposed. Firstly, the disparity map was obtained by using stereo matching on the left and right images captured by using binocular cameras, and the 3D point cloud was reconstructed. Then the least square method was used to estimate the ground plane equation and calculate the distance from the image space point to the ground plane. After that, the superpixels were obtained by using SLIC algorithm, and the median distance of the superpixels to the ground plane were calculated. Finally, the probability of the pixel being an obstacle was calculated by using the logistic regression method and the belief function. The experimental results show that the present method can detect road obstacles reliably and provide the valuable probabilistic data for multi-sensor fusion methods of obstacle detection.




2019, 38(2): 283-291.
doi: 10.13433/j.cnki.1003-8728.20180158
Abstract:
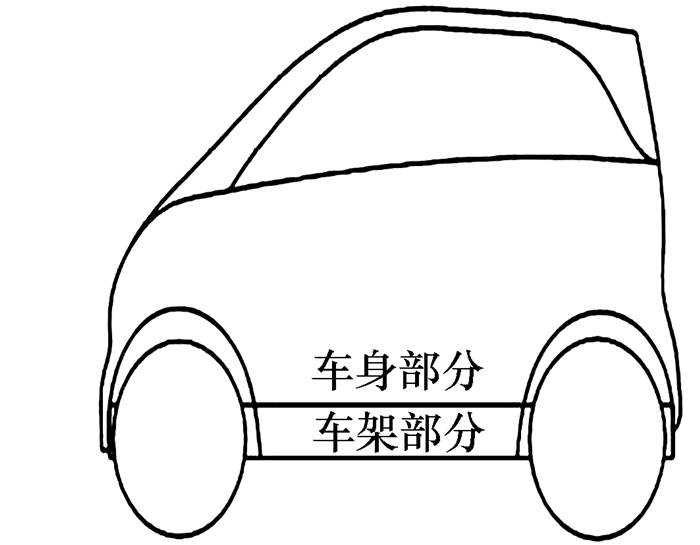
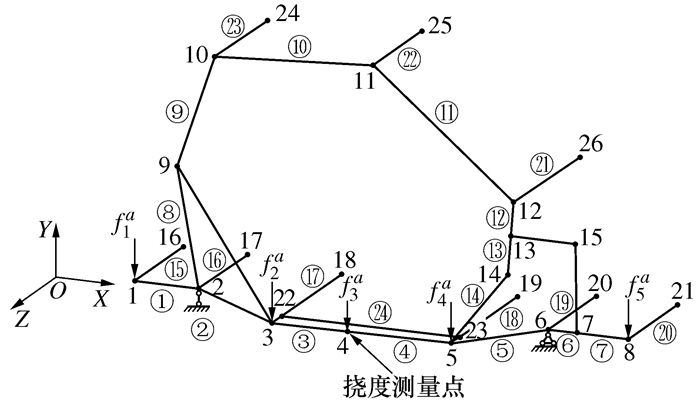
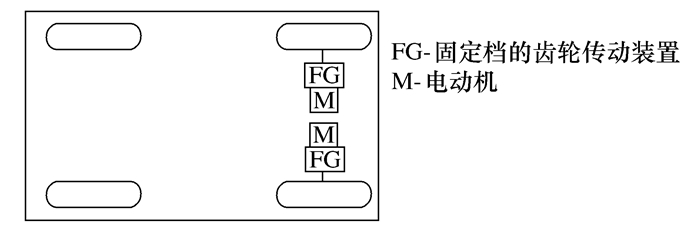
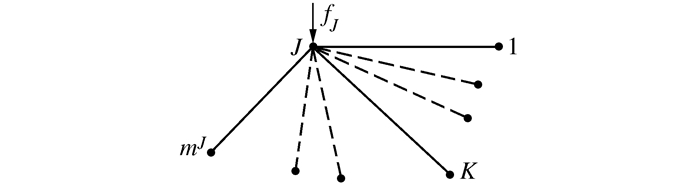
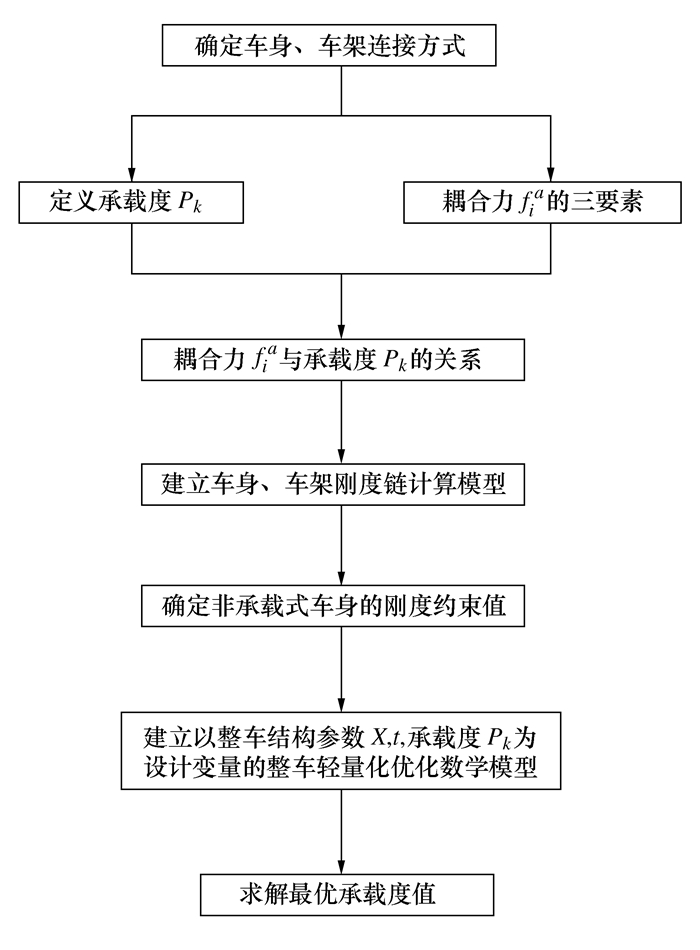
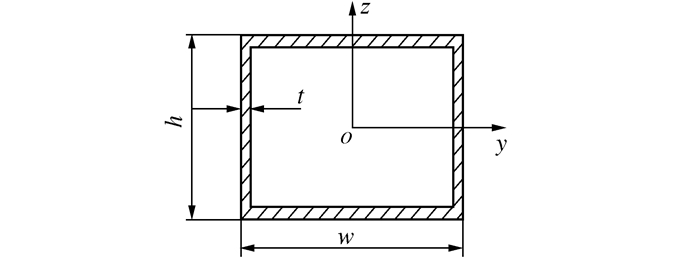
Known optimal loading degree is of great significance to guide the lightweight design of pure electric vehicles with body chassis frame construction, at the stage of positive conceptual design. In this paper, a simplified body model is established by reference to a pure electric vehicle with the modular structure. Function relation between loading degree of vehicle with body chassis frame construction under the action of multi-point concentrated load and coupling force is determined. Setting up the calculation model of car body and frame which are both under the action of coupling force by using reverberation-ray matrix stiffness chain, this design method ensures the consistency of the vehicle modeling process. This model considers bending stiffness as constraint conditions and takes vehicle lightweight as objective function for objective optimization, which is solved by using genetic algorithms to get the optimal proportion between body and frame and simplified beam section parameters of vehicle with body chassis frame construction. Finally, the stiffness and loading degree are calculated by using the finite element method, the results proved the rationality and validity of the research method.
Known optimal loading degree is of great significance to guide the lightweight design of pure electric vehicles with body chassis frame construction, at the stage of positive conceptual design. In this paper, a simplified body model is established by reference to a pure electric vehicle with the modular structure. Function relation between loading degree of vehicle with body chassis frame construction under the action of multi-point concentrated load and coupling force is determined. Setting up the calculation model of car body and frame which are both under the action of coupling force by using reverberation-ray matrix stiffness chain, this design method ensures the consistency of the vehicle modeling process. This model considers bending stiffness as constraint conditions and takes vehicle lightweight as objective function for objective optimization, which is solved by using genetic algorithms to get the optimal proportion between body and frame and simplified beam section parameters of vehicle with body chassis frame construction. Finally, the stiffness and loading degree are calculated by using the finite element method, the results proved the rationality and validity of the research method.














2019, 38(2): 292-297.
doi: 10.13433/j.cnki.1003-8728.20180150
Abstract:
The electric vehicle's stability where adhesion coefficient is low was studied. Wheels were likely to looked during the vehicle were braking on icy and snowy pavement, because the major of braking force was regenerative braking force this moment. The resulting was the deterioration of its stability. Based on the pure electric vehicle mode, the braking force strategy of inputting wheel slip ratio is proposed in this paper. A controller with sliding mode control was designed for controlling slip ratio. This control method was used to improve the regenerative braking force distribution strategy. Especially with being small braking strength, it will immediately reduce the regeneration power when slip rate of vehicle exceeded the prescribed slip rate, restored the electric vehicles to its original stability. Then the final simulation results show that the electric vehicle model that used sliding mode controller has good driving stability with braking condition of constant strength, and the braking energy recovery rate is increased by 4.1% in frequent braking conditions.
The electric vehicle's stability where adhesion coefficient is low was studied. Wheels were likely to looked during the vehicle were braking on icy and snowy pavement, because the major of braking force was regenerative braking force this moment. The resulting was the deterioration of its stability. Based on the pure electric vehicle mode, the braking force strategy of inputting wheel slip ratio is proposed in this paper. A controller with sliding mode control was designed for controlling slip ratio. This control method was used to improve the regenerative braking force distribution strategy. Especially with being small braking strength, it will immediately reduce the regeneration power when slip rate of vehicle exceeded the prescribed slip rate, restored the electric vehicles to its original stability. Then the final simulation results show that the electric vehicle model that used sliding mode controller has good driving stability with braking condition of constant strength, and the braking energy recovery rate is increased by 4.1% in frequent braking conditions.









2019, 38(2): 298-303.
doi: 10.13433/j.cnki.1003-8728.20180169
Abstract:
This paper presents a structural interval parameter inverse solution method based on DIRECT algorithm. The inverse solution of structural interval parameters is generally translated into a two-layer solution of uncertainty analysis and model parameter optimization. First, an interval model is applied to describing the uncertainties of measured responses and identified structural parameters, and the corresponding inverse model of structural interval parameters is established. Second, in the process of iterative inversion, the adaptive updating radial basis function is applied to approximating the original system model, and the DIRECT algorithm is used to analyze the uncertainty of the inner layer. Finally, the optimization model of the outer layer is solved with the genetic algorithm to identify the upper and lower bounds of structural interval parameters. Numerical examples are used to verify the correctness and effectiveness of the method presented in the paper, which is applied to identifying the uncertainty parameters in the vehicle occupant constraint system.
This paper presents a structural interval parameter inverse solution method based on DIRECT algorithm. The inverse solution of structural interval parameters is generally translated into a two-layer solution of uncertainty analysis and model parameter optimization. First, an interval model is applied to describing the uncertainties of measured responses and identified structural parameters, and the corresponding inverse model of structural interval parameters is established. Second, in the process of iterative inversion, the adaptive updating radial basis function is applied to approximating the original system model, and the DIRECT algorithm is used to analyze the uncertainty of the inner layer. Finally, the optimization model of the outer layer is solved with the genetic algorithm to identify the upper and lower bounds of structural interval parameters. Numerical examples are used to verify the correctness and effectiveness of the method presented in the paper, which is applied to identifying the uncertainty parameters in the vehicle occupant constraint system.






2019, 38(2): 304-310.
doi: 10.13433/j.cnki.1003-8728.20180152
Abstract:
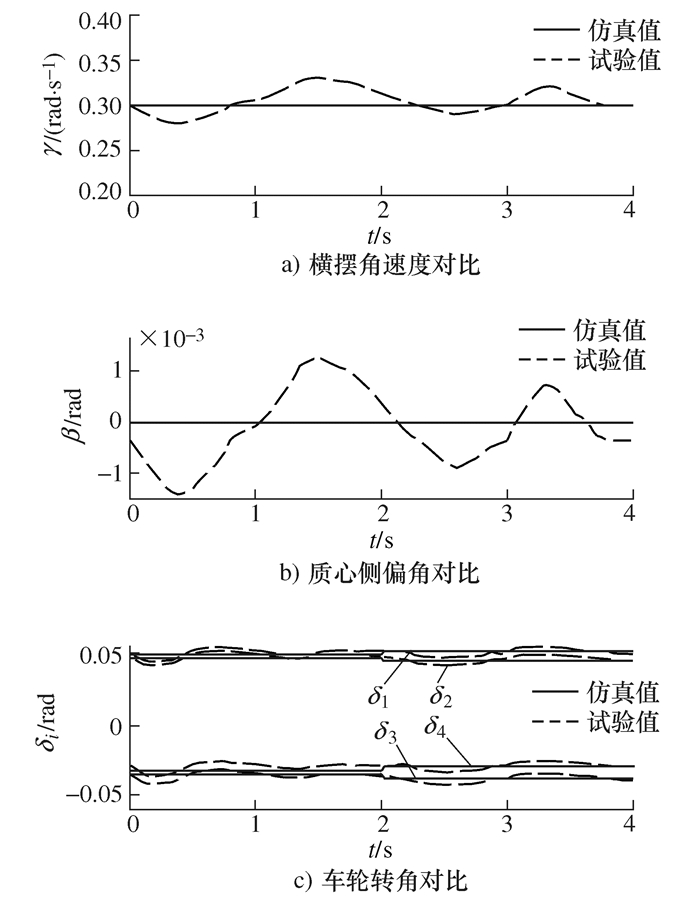
The four-wheel independent steering vehicle's dynamics model of two degrees of freedom is established, and its input is the four-wheel tire side slip angle, whose total absolute value is as small as objective function, including feedforward and feedback control. Based on the steady-state expression of the dynamics model and the ideal yaw rate, the constraint condition is obtained for feedforward control. The vehicle control model and the ideal track model are established; the constraint conditions of feedback control are obtained. The optimal theory is used to solve the controller, which is analyzed with the simulation results. The yaw is discussed. The driver-vehicle-road closed-loop system is established; the road simulations and experiments on low-speed vehicle show that the controller distributes the four-wheel steering angle according to the road adhesion coefficient and that it makes the best use of road adhesion conditions and ensures that the tire side slip angle in good adhesion conditions is zero. The experimental results show that the controller has a good tracking performance and robustness, thus improving the vehicle handling stability.
The four-wheel independent steering vehicle's dynamics model of two degrees of freedom is established, and its input is the four-wheel tire side slip angle, whose total absolute value is as small as objective function, including feedforward and feedback control. Based on the steady-state expression of the dynamics model and the ideal yaw rate, the constraint condition is obtained for feedforward control. The vehicle control model and the ideal track model are established; the constraint conditions of feedback control are obtained. The optimal theory is used to solve the controller, which is analyzed with the simulation results. The yaw is discussed. The driver-vehicle-road closed-loop system is established; the road simulations and experiments on low-speed vehicle show that the controller distributes the four-wheel steering angle according to the road adhesion coefficient and that it makes the best use of road adhesion conditions and ensures that the tire side slip angle in good adhesion conditions is zero. The experimental results show that the controller has a good tracking performance and robustness, thus improving the vehicle handling stability.







2019, 38(2): 311-316.
doi: 10.13433/j.cnki.1003-8728.20180037
Abstract:
The truss frame is widely used in high-performance vehicles because it has the advantages of large rigidity and light weight. It is important for safety and durability of vehicles to analyze the fatigue damage and fatigue risk points of the frame. Firstly, the test route was planned according to the vehicle characteristics. The acceleration load spectrum was obtained through the acceleration sensor. Secondly, spectrum analysis was used for the characteristics of the frame and frequency of load change. The time series fatigue calculation method was chosen. Thirdly, the rain-flow counting method was used to count the load spectrum. Several commonly mean stress amending theories were analyzed and compared. Lastly, the fatigue analysis of the frame was carried out. The predicted life of the frame and the location of the fatigue risk point were known.
The truss frame is widely used in high-performance vehicles because it has the advantages of large rigidity and light weight. It is important for safety and durability of vehicles to analyze the fatigue damage and fatigue risk points of the frame. Firstly, the test route was planned according to the vehicle characteristics. The acceleration load spectrum was obtained through the acceleration sensor. Secondly, spectrum analysis was used for the characteristics of the frame and frequency of load change. The time series fatigue calculation method was chosen. Thirdly, the rain-flow counting method was used to count the load spectrum. Several commonly mean stress amending theories were analyzed and compared. Lastly, the fatigue analysis of the frame was carried out. The predicted life of the frame and the location of the fatigue risk point were known.









2019, 38(2): 317-321.
doi: 10.13433/j.cnki.1003-8728.20180259
Abstract:
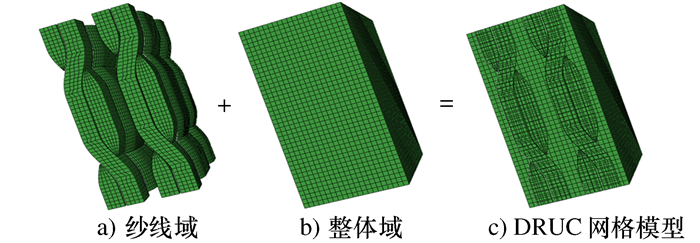
Considering the complex geometric architecture and nesting phenomenon in manufacturing process of plain woven composite laminates, the parametric double-layer representative unit cell is developed based on the domain decomposition technique. In the present model, the yarn domains and global domain are built up separately, subsequently the two domains are superimposed by using the nodal degree of freedom coupling technique. Finally the material models for yarn domains are adjusted to achieve the equivalent physical properties with actual composite systems. Based on the validated numerical model, the results indicate that the nesting leads to increasing in module by about 15% for woven composite laminates. Furthermore, the change in the fiber volume frication caused by nesting is found to be the primary factor for the variation of mechanical properties.
Considering the complex geometric architecture and nesting phenomenon in manufacturing process of plain woven composite laminates, the parametric double-layer representative unit cell is developed based on the domain decomposition technique. In the present model, the yarn domains and global domain are built up separately, subsequently the two domains are superimposed by using the nodal degree of freedom coupling technique. Finally the material models for yarn domains are adjusted to achieve the equivalent physical properties with actual composite systems. Based on the validated numerical model, the results indicate that the nesting leads to increasing in module by about 15% for woven composite laminates. Furthermore, the change in the fiber volume frication caused by nesting is found to be the primary factor for the variation of mechanical properties.




2019, 38(2): 322-328.
doi: 10.13433/j.cnki.1003-8728.20180147
Abstract:
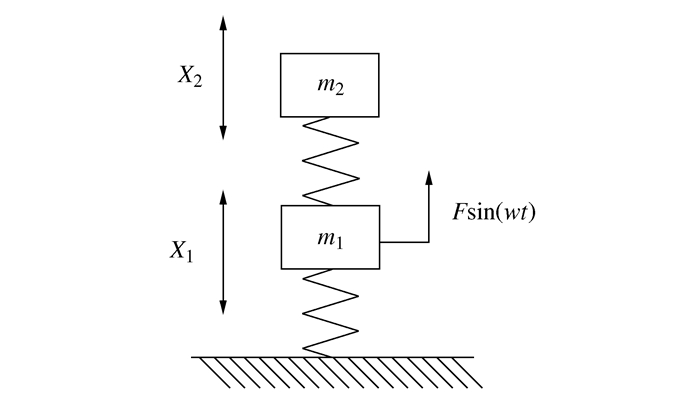
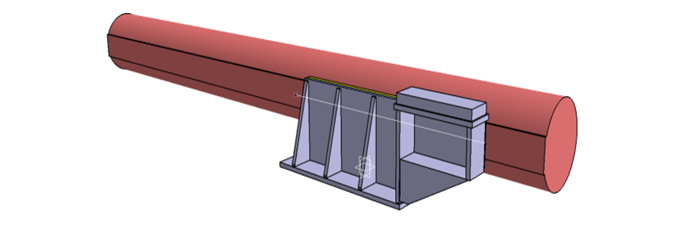
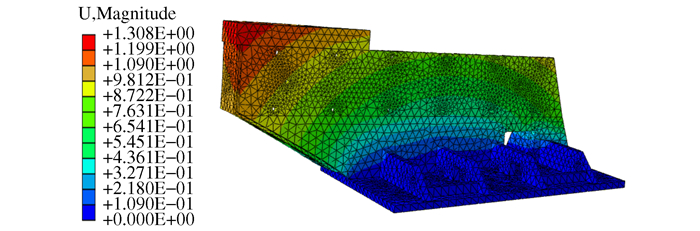
Vibration test is an important way to examine reliability of aerospace products. For a large slender off-centre pod vibration test, the theory modal of two freedom vibration system is firstly introduced. Then, the vibration test fixture is designed with balance weight method. The modal parameters and random dynamic response of the fixture are analyzed using finite element software ABAQUS in both free state and test specimen joint state. The results indicate that first natural frequency of the fixture in free state is 198.6 Hz. First natural frequency of test specimen joint state is 202.1 Hz. The amplification factor of the fixture is 1.6. The largest acceleration error from different joint points is 31.4%. Above-mentioned technique data meets the standards of vibration test fixture design. Finally, the vibration test for slender off-centre pod is carried out using the fixture, from which controlling is steady and errors are within the tolerance range. The rationality of the fixture is verified.
Vibration test is an important way to examine reliability of aerospace products. For a large slender off-centre pod vibration test, the theory modal of two freedom vibration system is firstly introduced. Then, the vibration test fixture is designed with balance weight method. The modal parameters and random dynamic response of the fixture are analyzed using finite element software ABAQUS in both free state and test specimen joint state. The results indicate that first natural frequency of the fixture in free state is 198.6 Hz. First natural frequency of test specimen joint state is 202.1 Hz. The amplification factor of the fixture is 1.6. The largest acceleration error from different joint points is 31.4%. Above-mentioned technique data meets the standards of vibration test fixture design. Finally, the vibration test for slender off-centre pod is carried out using the fixture, from which controlling is steady and errors are within the tolerance range. The rationality of the fixture is verified.