




Kinematic Simulation and Efficacy Evaluation of Hybrid Wrist Joint Rehabilitation Mechanism
-
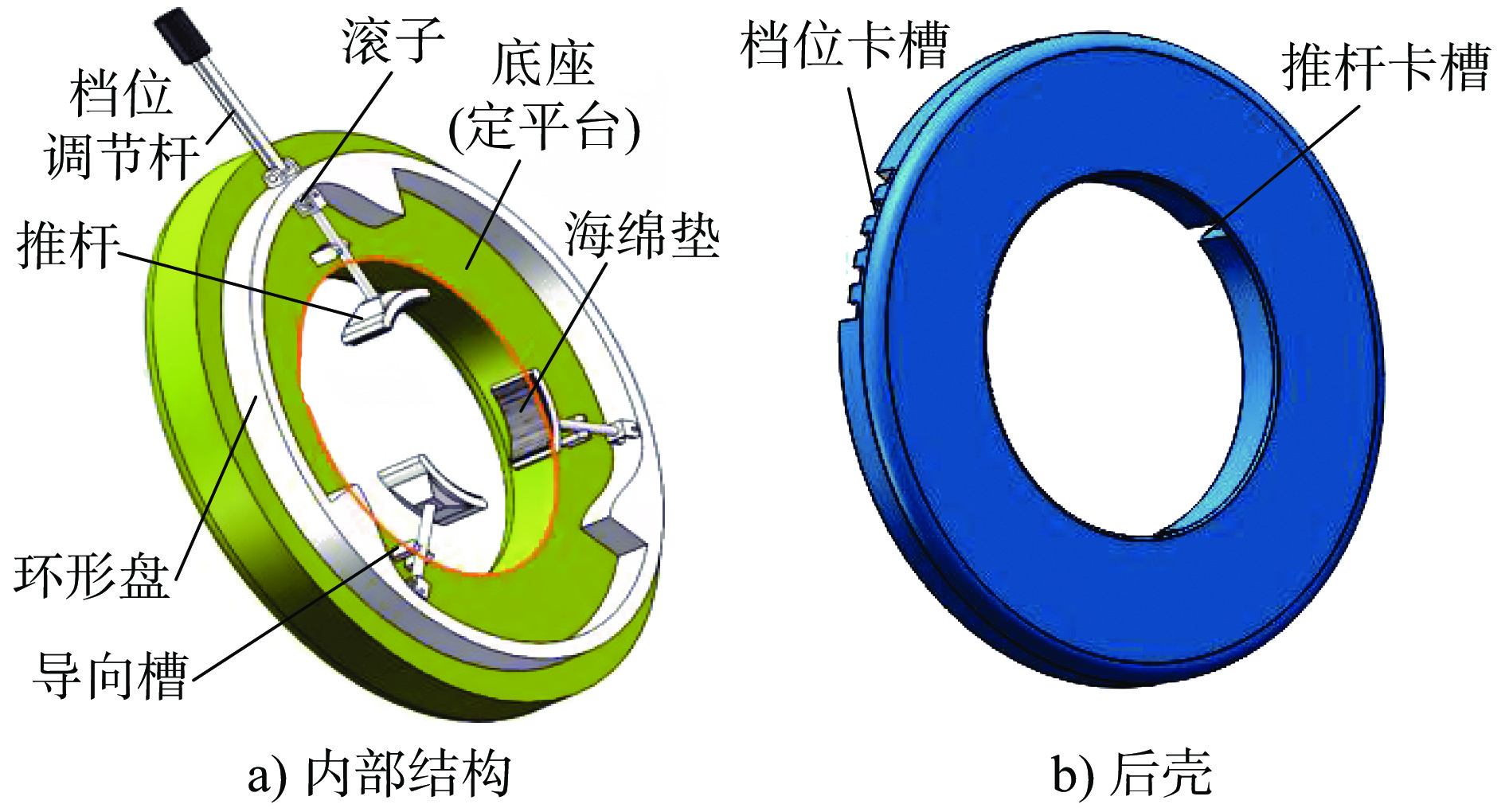
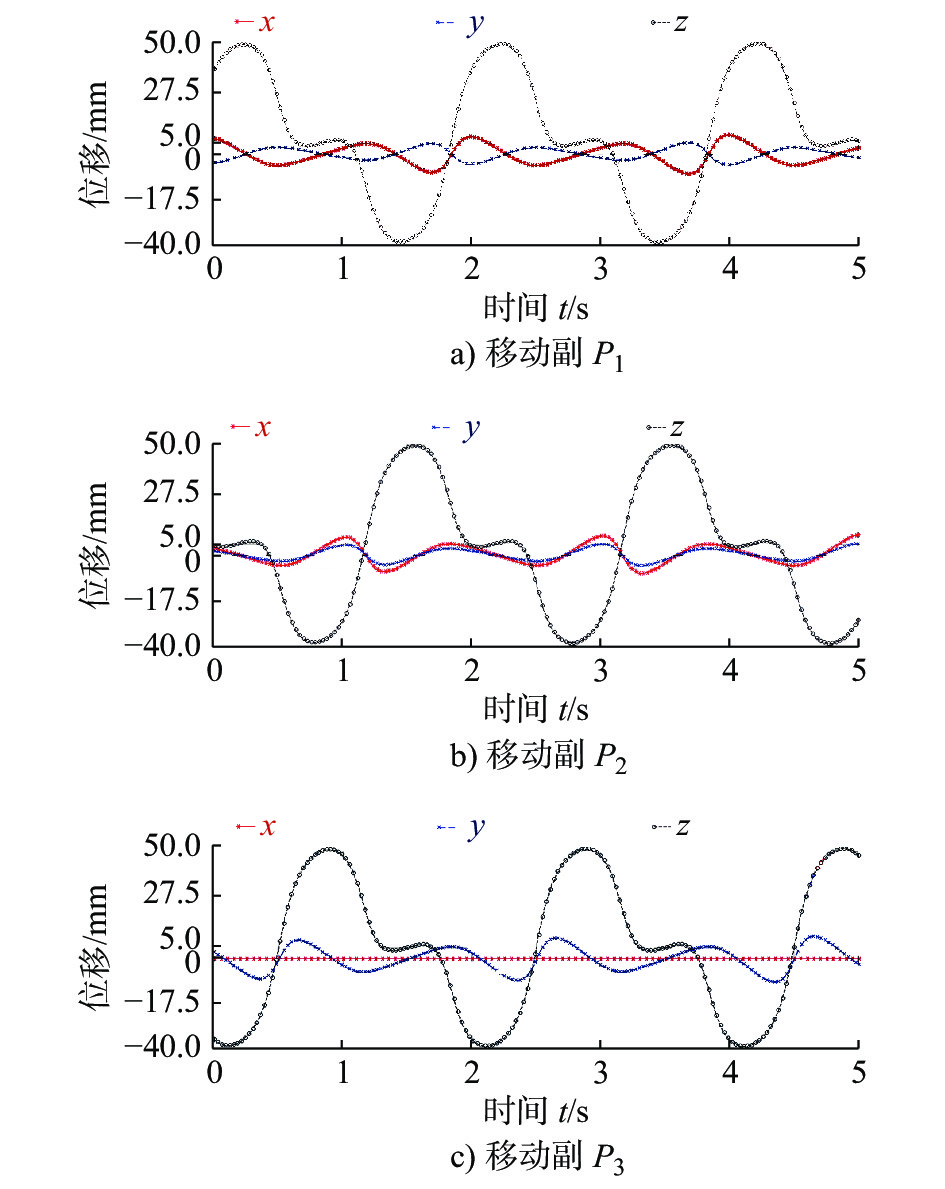
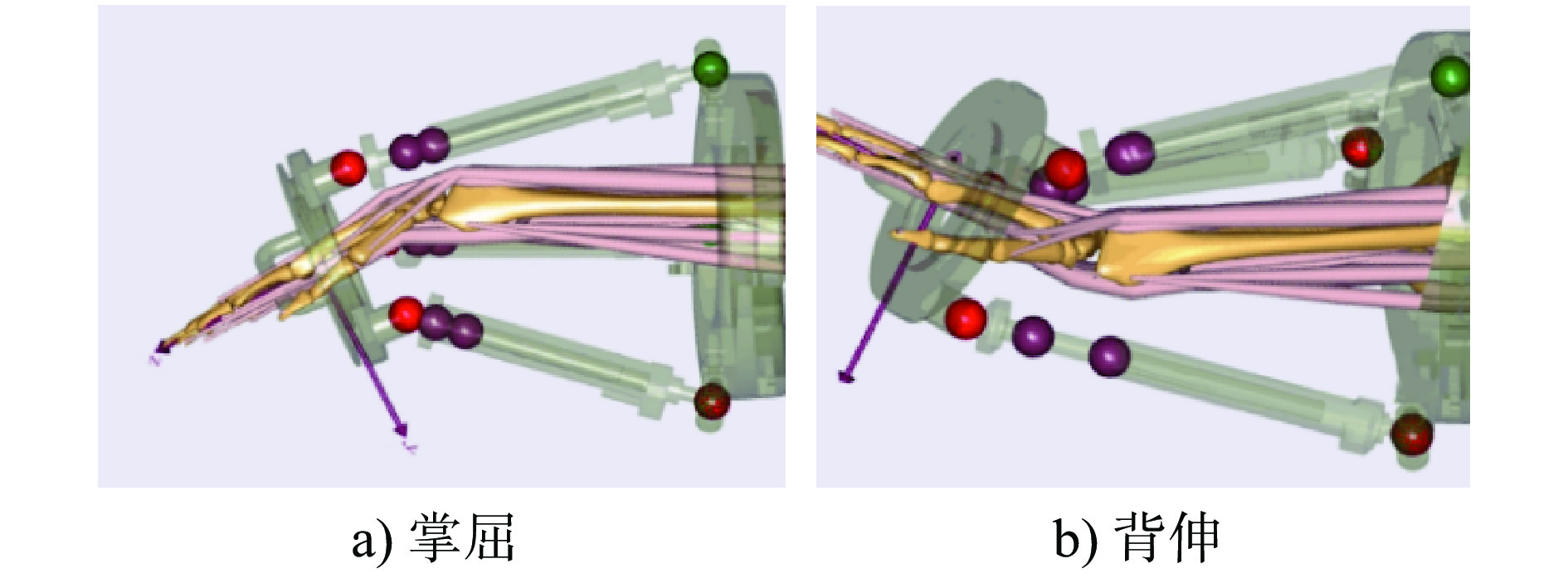
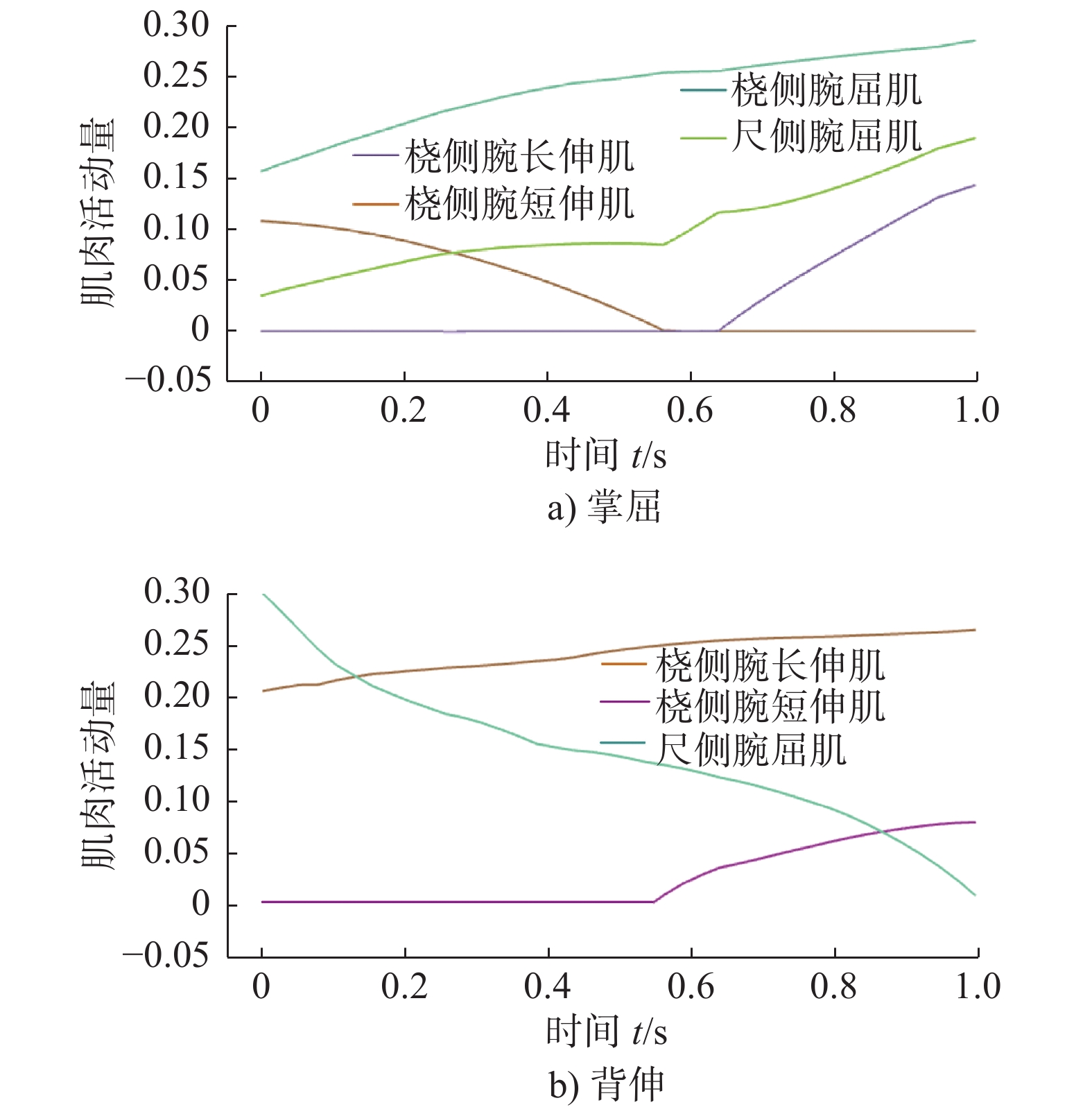
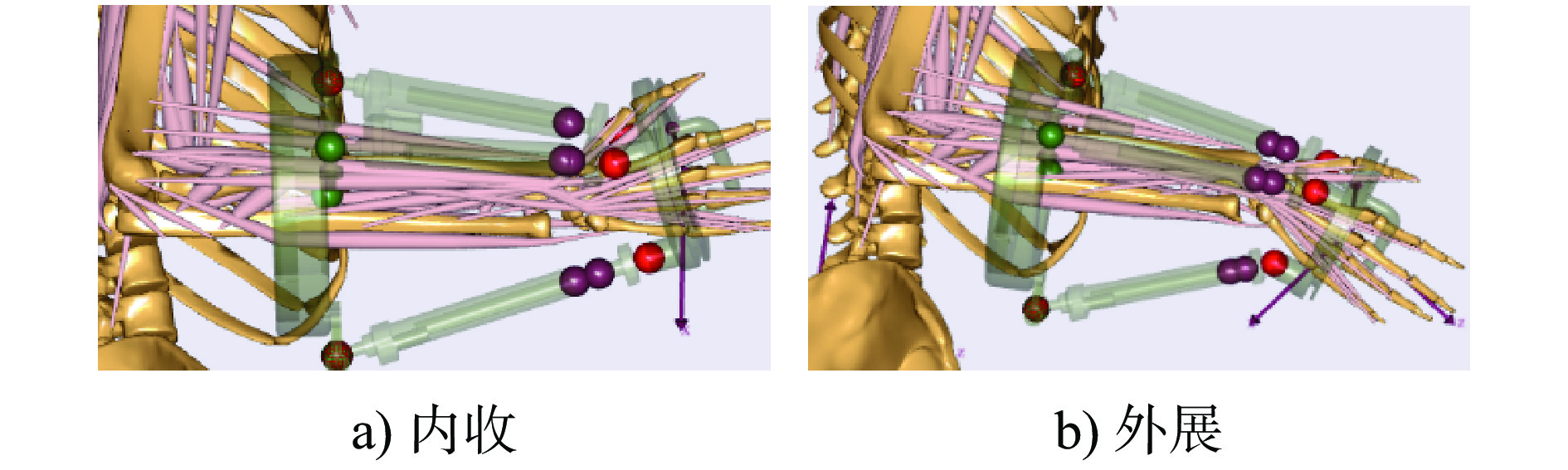
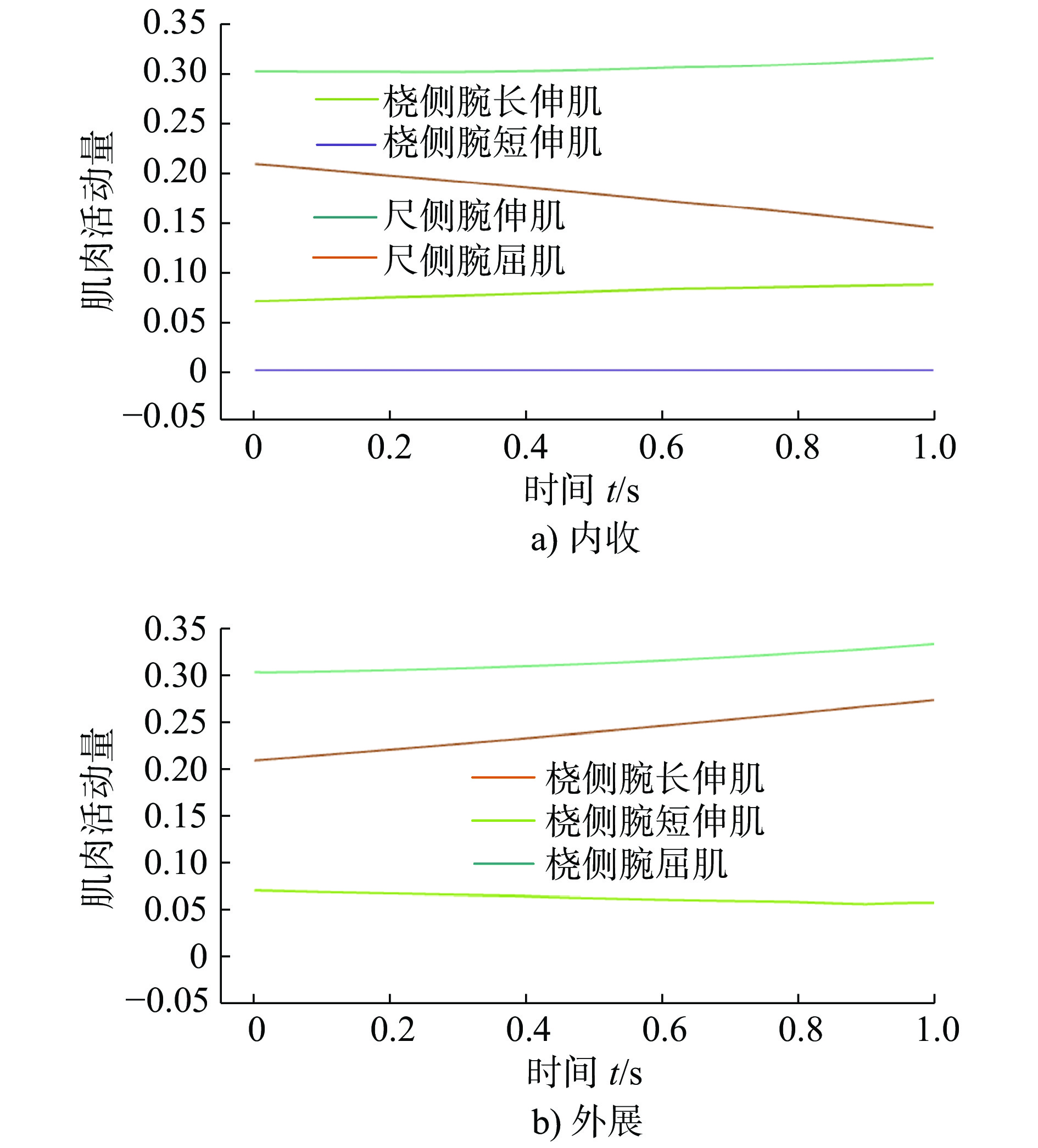
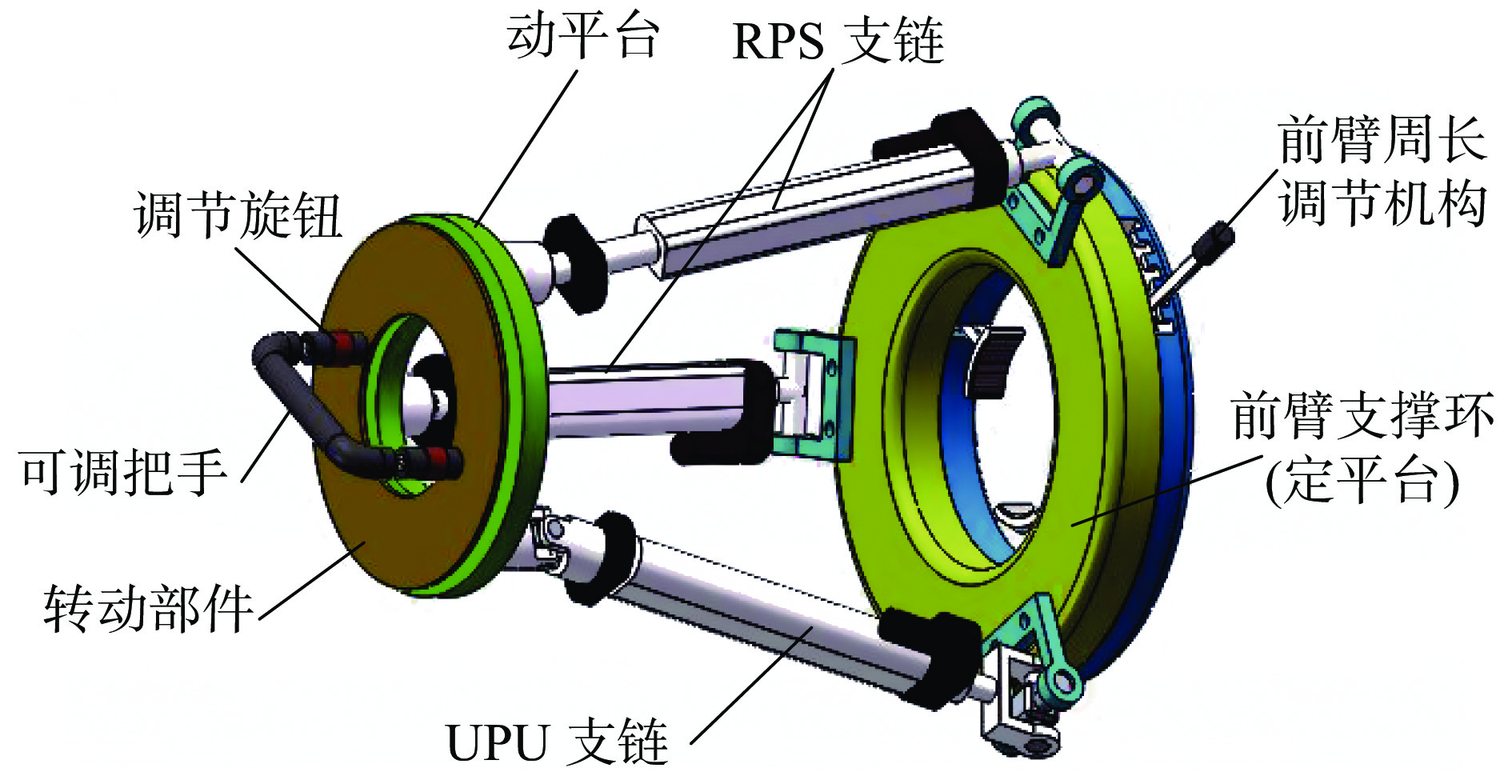
摘要: 针对腕关节损伤或功能性退化患者,基于(2-RPS/UPU)&R混联机构提出一种可穿戴式腕关节康复机器人。用SolidWorks进行三维建模,导入Adams中进行正逆运动学仿真,在整个仿真过程中,曲线光滑,没有突变点,说明该腕关节康复机器人稳定性好,安全性强。利用AnyBody提取康复训练时腕关节处肌肉相关力学的变化参数,并对康复效果进行评估,结果表明该机器人带动手腕做康复运动时,腕关节周围肌肉的活动度和收缩情况符合康复医学的相关规律,不会对肌肉造成二次伤害,满足受损腕关节的康复需求。
-
关键词:
- (2-RPS/UPU)& R /
- 腕关节 /
- 运动学 /
- 康复效果 /
- AnyBody
Abstract: A wearable wrist rehabilitation robot was proposed based on the (2-RPS/UPU)&R hybrid mechanism for patients with wrist injury or functional degradation. Three-dimensional modeling was first carried out with SolidWorks and then imported into Adams for forward and inverse kinematics simulation. In the whole simulation process, the performance curves were smooth and there was no mutation point, indicating that the wrist rehabilitation robot had good stability and strong security. The mechanical parameters of muscle in the wrist joint were obtained and the rehabilitation efficacy was evaluated with AnyBody during rehabilitation training. The results showed that the activity and contraction of the muscles around the wrist were consistent with the relevant laws of rehabilitation medicine and would not cause muscle secondary damage, so as to meet the rehabilitation needs of the wrist joint.-
Key words:
- (2-RPS-UPU)& R /
- wrist joint /
- kinematics /
- rehabilitation efficacy /
- AnyBody
-
[1] 曾露. 基于AR的腕关节尺偏桡偏康复评估和训练研究[D]. 重庆: 西南大学, 2018ZENG L. Research on evaluation and training of wrist ulnar and radial deviation rehabilitation based on AR[D]. Chongqing: Southwest University, 2018 (in Chinese) [2] 王晓倩. 肘腕关节康复机器人研制[D]. 秦皇岛: 燕山大学, 2015WANG X Q. Design and manufactur on the mechanism of elbow-wrist joint rehabilitation robot[D]. Qinhuangdao: Yanshan University, 2015 (in Chinese) [3] 王萌亚, 王仲朋, 陈龙, 等. 卒中后运动神经反馈康复训练研究进展与前景[J]. 中国生物医学工程学报, 2019, 38(6): 742-752 doi: 10.3969/j.issn.0258-8021.2019.06.013WANG M Y, WANG Z P, CHEN L, et al. Research progress and prospects of motor neurofeedback rehabilitation training after stroke[J]. Chinese Journal of Biomedical Engineering, 2019, 38(6): 742-752 (in Chinese) doi: 10.3969/j.issn.0258-8021.2019.06.013 [4] HSIEH W M, HWANG Y S, CHEN S C, et al. Application of the Blobo bluetooth ball in wrist rehabilitation training[J]. Journal of Physical Therapy Science, 2016, 28(1): 27-32 doi: 10.1589/jpts.28.27 [5] 边辉, 赵铁石, 田行斌, 等. 生物融合式康复机构及其应用[J]. 机器人, 2010, 32(4): 470-477 doi: 10.3724/SP.J.1218.2010.00470BIAN H, ZHAO T S, TIAN X B, et al. Bio-syncretic rehabilitation mechanism and its application[J]. Robot, 2010, 32(4): 470-477 (in Chinese) doi: 10.3724/SP.J.1218.2010.00470 [6] 孙长城, 王春方, 丁晓晶, 等. 上肢康复机器人辅助训练对脑卒中偏瘫患者上肢运动功能的影响[J]. 中国康复医学杂志, 2018, 33(10): 1162-1167 doi: 10.3969/j.issn.1001-1242.2018.10.006SUN C C, WANG C F, DING X J, et al. Effects of assistant training of upper-limb rehabilitation robot on upper-limb motor function of hemiplegic stroke patients[J]. Chinese Journal of Rehabilitation Medicine, 2018, 33(10): 1162-1167 (in Chinese) doi: 10.3969/j.issn.1001-1242.2018.10.006 [7] 罗洋. 基于肌电信号控制的腕关节术后康复外骨骼系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2018LUO Y. Research on exoskeleton system for postoperative wrist rehabilitation based on the control of electromyography[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese) [8] 李明强, 谢叻. 腕功能康复机器人的设计与分析[J]. 机械设计与研究, 2016, 32(4): 20-23LI M Q, XIE L. Research and development of wrist rehabilitation robot[J]. Machine Design & Research, 2016, 32(4): 20-23 (in Chinese) [9] ALLINGTON J, SPENCER S J, KLEIN J, et al. Supinator extender (SUE): a pneumatically actuated robot for forearm/wrist rehabilitation after stroke[C]// Proceedings of 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Boston: IEEE, 2011: 1579-1582 [10] ANDRIKOPOULOS G, NIKOLAKOPOULOS G, MANESIS S. Design and development of an exoskeletal wrist prototype via pneumatic artificial muscles[J]. Meccanica, 2015, 50(11): 2709-2730 doi: 10.1007/s11012-015-0199-8 [11] 吴青聪. 套索驱动重力平衡上肢康复外骨骼研究[D]. 南京: 东南大学, 2016WU Q C. Research on gravity balanced upper limb rehabilitation exoskeleton using tendon-sheath actuator[D]. Nanjing: Southeast University, 2016 (in Chinese) [12] 郭旺旺, 李瑞琴, 宁峰平. 用于人体关节的P(2-RPS)&U可重构康复机构及运动学分析[J]. 机械传动, 2019, 43(3): 35-40GUO W W, LI R Q, NING F P. P(2-RPS)&U reconfigurable rehabilitation mechanism used for human joint and its kinematics analysis[J]. Journal of Mechanical Transmission, 2019, 43(3): 35-40 (in Chinese) [13] 徐欢欢, 何育民, 孙朝阳, 等. AnyBody环境下人体步态的逆向动力学研究[J]. 机械科学与技术, 2019, 38(12): 1819-1824XU H H, HE Y M, SUN Z Y, et al. Research of reverse dynamics of human gait via anybody technology[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(12): 1819-1824 (in Chinese) [14] SKALS S, RASMUSSEN K P, BENDTSEN K M, et al. A musculoskeletal model driven by dual Microsoft Kinect sensor data[J]. Multibody System Dynamics, 2017, 41(4): 297-316 doi: 10.1007/s11044-017-9573-8 [15] 赵明. 外骨骼式下肢康复机器人训练过程仿真及其有效性研究[D]. 天津: 天津大学, 2016ZHAO M. Simulation and effectiveness research of the training process about the exoskeleton lower limb rehabilitation robot[D]. Tianjin: Tianjin University, 2016 (in Chinese) -

 下载:
下载:




 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 220
- HTML全文浏览量: 94
- PDF下载量: 27
- 被引次数: 0
