




A Method Combining Finite Element and Topology Optimization and Application in Lightweight Structure Design of Robot
-
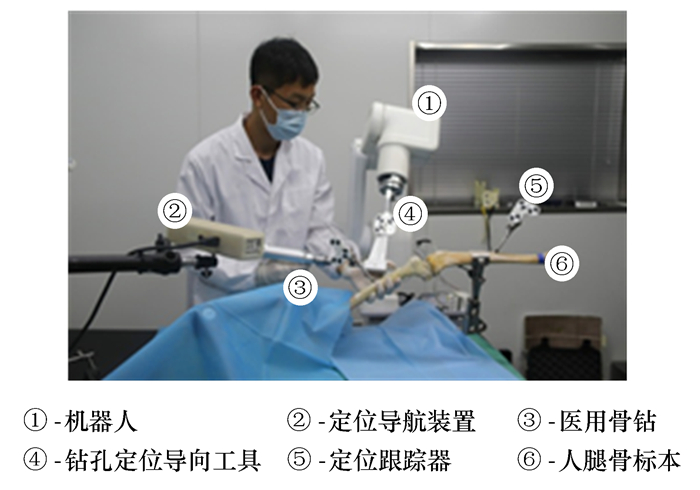
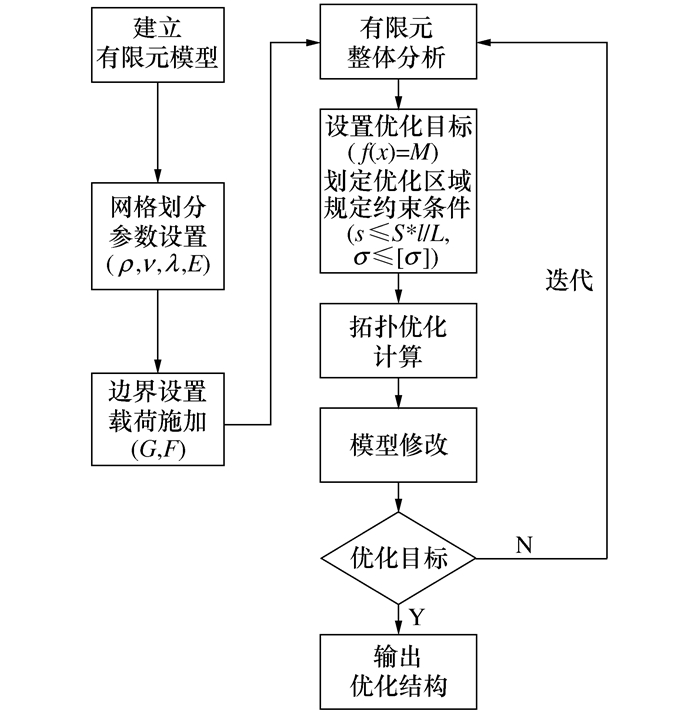
摘要: 针对协作机器人轻量化和动态特性的问题,本文提出了一种联合整体有限元分析和局部拓扑优化的机器人轻量化方法,并将其应用于设计一款六自由度协作机器人。该方法通过对整体进行有限元分析得到要优化部件的载荷及边界条件,从而基于上述条件对该部件进行拓扑优化,得到优化结构。优化结果表明优化后结构相对于初始结构整体减重4.83 kg,仿真结果为末端位移减小至2.57 mm,实测为2.88 mm,均达到目标要求,同时将整机六阶固有频率提高11.30%左右,高于当前文献所采用的拓扑优化所提高的1.69%。最后面向交叉韧带定位实验证明了该方法的有效性。Abstract: A method of robot lightweight combining global finite element analysis and local topology optimization is proposed and applied to the design of a six-degree-of-freedom cooperative robot to solve the lightweight and dynamic characteristics. The method obtains the load and boundary conditions of the component to be optimized with finite element analysis on the whole, and then optimizes the topology based on the above conditions to obtain an optimal structure. The optimization results show that the optimal structure loses 4.83 kg compared with the initial structure. The simulation results show that the end displacement is reduced to 2.57 mm and the measured value is 2.88 mm, all of which can meet the target requirements. At the same time, the sixth-order natural frequency of the whole machine increased by about 11.30%, which is higher than the 1.69% improvement of the current literature. Finally, the effectiveness of this method was demonstrated by the anterior cruciate ligament positioning experiment.
-
Key words:
- cooperative robot /
- lightweight /
- finite element analysis /
- topology optimization
-
表 2 优化结果对照表
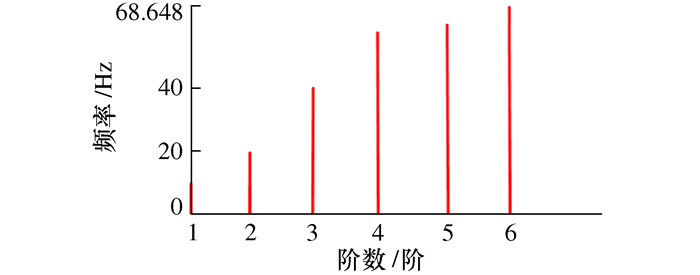
整机质量/kg 末端位移/mm 六阶频率/Hz 初始结构 21.56 3.50 68.65 单独约束拓扑法 17.78
(-17.54%)2.53
(-27.71%)69.81
(+1.69%)整体有限元分析结合拓扑法 17.72
(-17.82%)2.57
(-26.57%)76.41
(+11.30%) 下载: 导出CSV
下载: 导出CSV
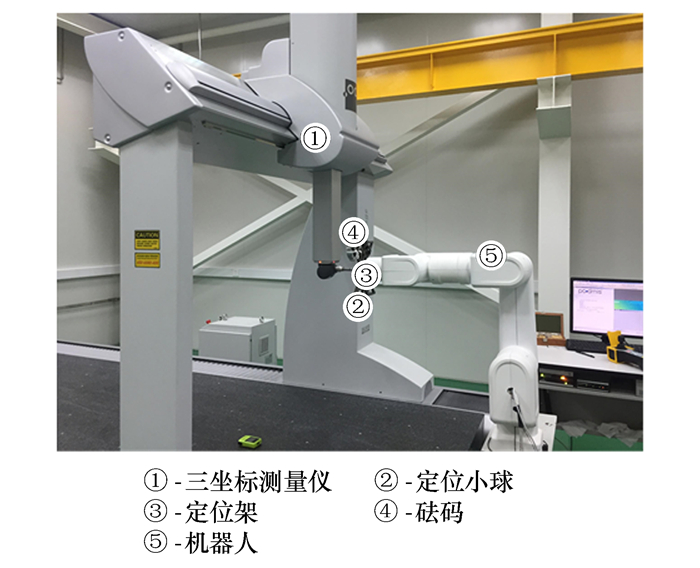
表 3 小球坐标数据表
mm X Y Z L 空载下小球位置 410 200 -650 794.103 3 负载下小球位置 409.045 8 198.859 7 -647.433 1 791.222 6 末端变形位移 - - - 2.880 7
下载: 导出CSV
-
[1] Netravali N A, Börner M, Bargar W L. The use of ROBODOC in total hip and knee arthroplasty[M]//Ritacco L E, Milano F E, Chao E. Computer-Assisted Musculoskeletal Surgery. Cham: Springer, 2016 [2] Luo Z W. Robotics, automation, and control in industrial and service settings[M]. East Chocolate Avenue, Hershey, PA: IRMA, 2015 [3] Vogel J, Haddadin S, Simeral J D, et al. Continuous control of the DLR light-weight robot Ⅲ by a human with tetraplegia using the BrainGate2 neural interface system[C]//Proceedings of the 12th International Symposium on Experimental Robotics. New Delhi and Agra, India: Springer, 2010 [4] Albers A, Ottnad J, Weiler H, et al. Methods for lightweight design of mechanical components in humanoid robots[C]//Proceedings of the 7th IEEE-RAS International Conference on Humanoid Robots. Pittsburgh, PA, USA: IEEE, 2007: 609-615 [5] Eschenauer H A, Olhoff N. Topology optimization of continuum structures: a review[J]. Applied Mechanics Reviews, 2001, 54(4):331-390 doi: 10.1115/1.1388075 [6] Schramm U, Zhou M. Recent developments in the commercial implementation of topology optimization[M]//Bendsøe M P, Olhoff N, Sigmund O. IUTAM Symposium on Topological Design Optimization of Structures, Machines and Material. Dordrecht: Springer, 2005: 239-248 [7] Xiao D H, Zhang H, Liu X D, et al. Novel steel wheel design based on multi-objective topology optimization[J]. Journal of Mechanical Science and Technology, 2014, 28(3):1007-1016 doi: 10.1007/s12206-013-1174-8 [8] 张永强, 丁晓红, 王海华.汽车座椅构件拓扑优化及自动化系统的研究[J].机械科学与技术, 2013, 32(12):1869-1873, 1878 https://journals.nwpu.edu.cn/jxkxyjs/article/id/5123Zhang Y Q, Ding X H, Wang H H. The automatic system and topology optimization design for the automobile seat components[J]. Mechanical Science and Technology for Aerospace Engineering, 2013, 32(12):1869-1873, 1878(in Chinese) https://journals.nwpu.edu.cn/jxkxyjs/article/id/5123 [9] 余健, 苏小平, 王宏楠.基于OptiStruct的盘式制动器拓扑优化设计[J].机械科学与技术, 2014, 33(9):1419-1422 doi: 10.13433/j.cnki.1003-8728.2014.0928Yu J, Su X P, Wang H N. The topology optimization design of disc brake based on the OptiStruct[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(9):1419-1422(in Chinese) doi: 10.13433/j.cnki.1003-8728.2014.0928 [10] Park H S, Dang X P. Development of a fiber-reinforced plastic armrest frame for weight-reduced automobiles[J]. International Journal of Automotive Technology, 2011, 12(1):83-92 doi: 10.1007/s12239-011-0011-2 [11] Qi W, Lu Z Z, Zhou C C. New topology optimization method for wing leading-edge ribs[J]. Journal of Aircraft, 2012, 48(5):1741-1748 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=d561f792cdac1150833e0ff3e86be8ef [12] 王婷, 王帮峰, 芦吉云, 等.一种拓扑优化方法在机翼可变后缘中的研究[J].机械科学与技术, 2011, 30(10):1660-1663 http://www.cnki.com.cn/Article/CJFDTotal-JXKX201110014.htmWang T, Wang B F, Lu J Y, et al. The study of a topological optimization method on the adaptive wing's trailing edge[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(10):1660-1663(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-JXKX201110014.htm [13] Bai Y F, Cong M, Li Y Y. Structural topology optimization for a robot upper arm based on SIMP method[M]//Ding X L, Kong X W, Dai J S. Advances in Reconfigurable Mechanisms and Robots Ⅱ. Cham: Springer, 2016 [14] Huang H B, Zhang G. The topology optimization for L-shape arm of motorman-HP20 robot[J]. Applied Mechanics and Materials, 2012, 201-202:871-874 doi: 10.4028/www.scientific.net/AMM.201-202.871 [15] 张传思.硅片传输机器人手臂的拓扑优化设计[D].辽宁大连: 大连理工大学, 2007Zhang C S. Topology optimization design of the wafer handling robot arm[D]. Liaoning Dalian: Dalian University of Technology, 2007(in Chinese) [16] Ye D S, Sun S M, Chen J, et al. The lightweight design of the humanoid robot frameworks based on evolutionary structural optimization[C]//Proceedings of 2014 IEEE International Conference on Robotics and Biomimetics. Bali, Indonesia: IEEE, 2014: 2286-2291 [17] Pagano N J, Halpin J C. Influence of end constraint in the testing of anisotropic bodies[M]//Reddy J N. Mechanics of Composite Materials. Dordrecht: Springer, 1994 [18] 叶尚辉.建立有限元模型的一般方法[J].电子机械工程, 1999(6):17-21 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199900081446Ye S H. A guide to finite element modeling[J]. Electro-Mechanical Engineering, 1999(6):17-21(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199900081446 -











 点击查看大图
点击查看大图
图(9) / 表(3)
计量
- 文章访问数: 641
- HTML全文浏览量: 411
- PDF下载量: 70
- 被引次数: 0
