




Design and Experiment of Modular Wall-climbing Robot
-
摘要: 为解决传统爬壁机器人在海上风电塔筒立面的作业效率低下和吸附力不足问题,根据模块化设计方法,提出一种可同时用于表面漆膜检测及运维的模块化履带式爬壁机器人。本文详细介绍作业机器人的结构组成及原理,为防止机器人发生滑落和倾覆现象,对其进行力学分析;构建间隙式永磁吸附模型,利用Maxwell软件与传统磁路设计进行参数化仿真对比,并分析气隙和壁厚对机器人吸附力的影响;通过样机平台模拟实验和真实作业,表明机器人能以稳定运动姿态实现塔筒高空及水下作业,验证了其模块化作业的可行性,并同时具备较强的吸附能力和越障能力。Abstract: In order to solve the low efficiency and insufficient adsorption capacity of traditional wall-climbing robot in offshore wind power tower facade, a modular crawler wall-climbing robot was proposed based on the modular design method, which can be used for surface paint film detection and operation and maintenance. The structure and principle of the working robot in detail is introduced. In order to prevent the robot from slipping and overturning, the mechanical analysis is carried out. A gap-type permanent magnet adsorption model was established, and Maxwell software was used to make parametric simulation comparison with traditional magnetic circuit design, and the effects of the air gap and wall thickness on the robot adsorption force were analyzed. The simulation experiment and real operation of the prototype platform show that the robot can realize the high-altitude and underwater operation of the tower with a stable motion posture, which verifies the feasibility of its modular operation, and has strong adsorption capacity and obstacle surmounting ability.
-
Key words:
- wall-climbing robot /
- modular design /
- permanent magnet adsorption
-
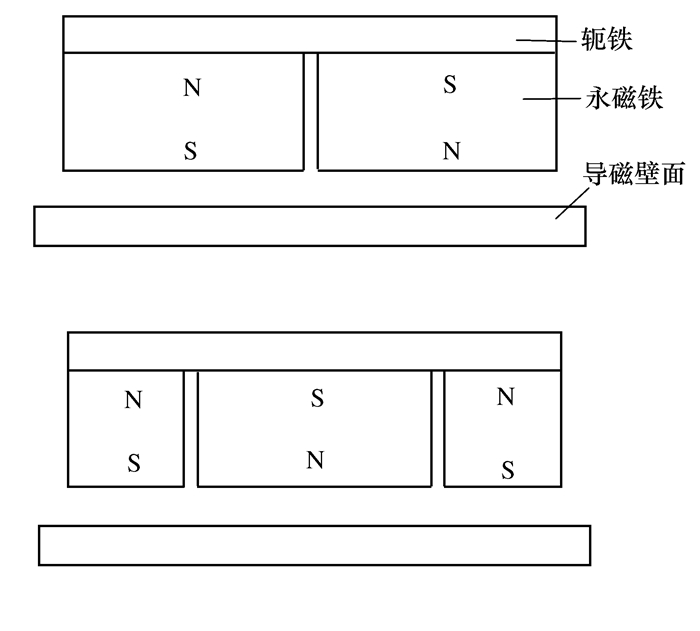
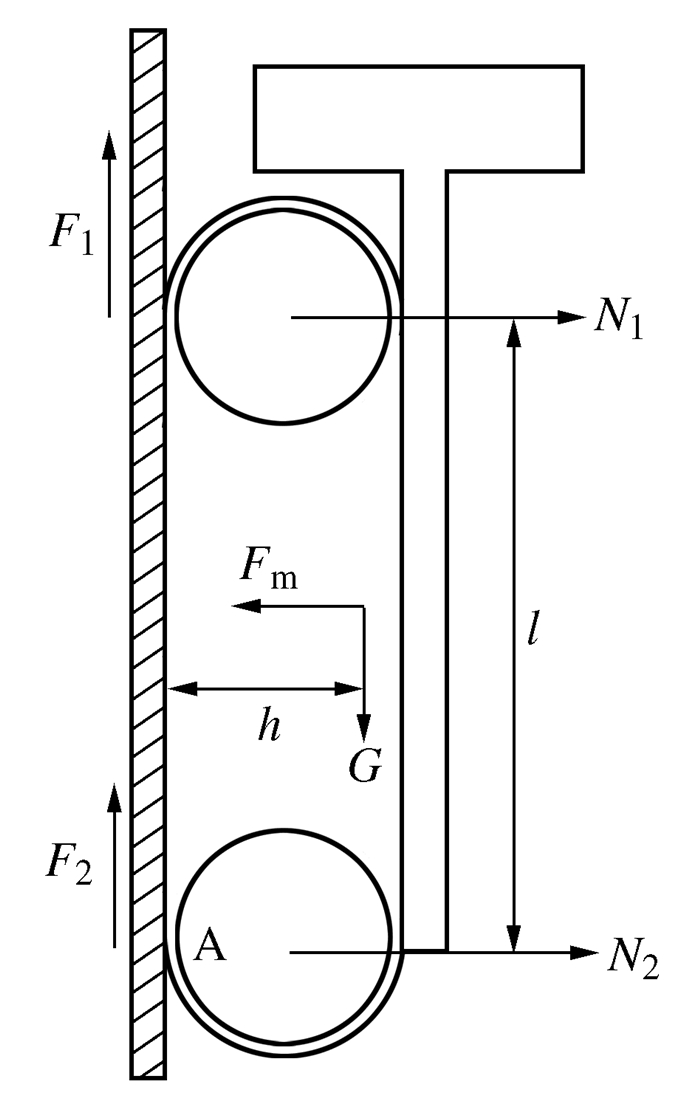
图 3 间隙式永磁吸附结构示意图
Figure 3. Schematic diagram of gap-type permanent magnet adsorption structure
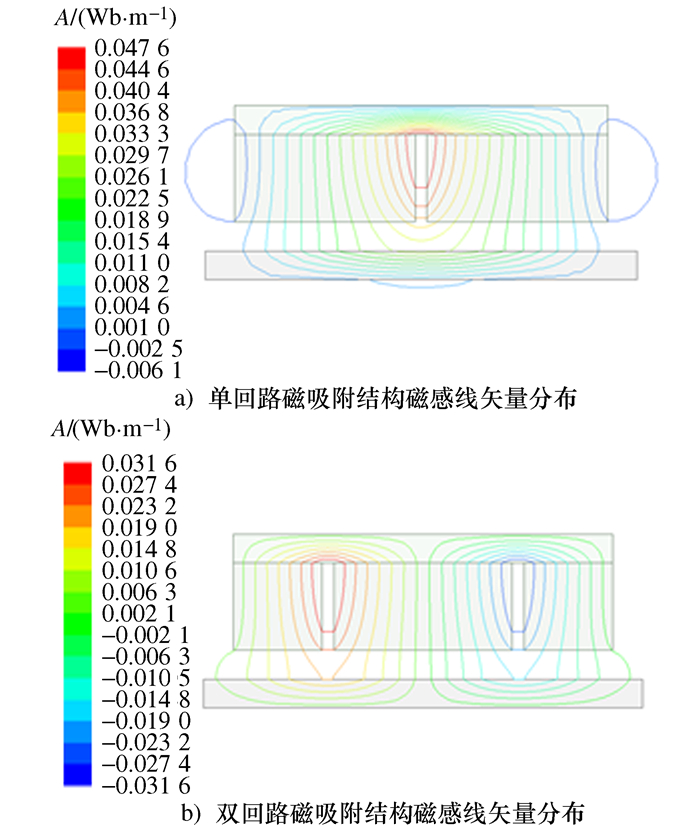
图 4 间隙式永磁吸附结构磁感线矢量分布图
Figure 4. Vector distribution of magnetic inductance line of gap-type permanent magnet adsorption structure
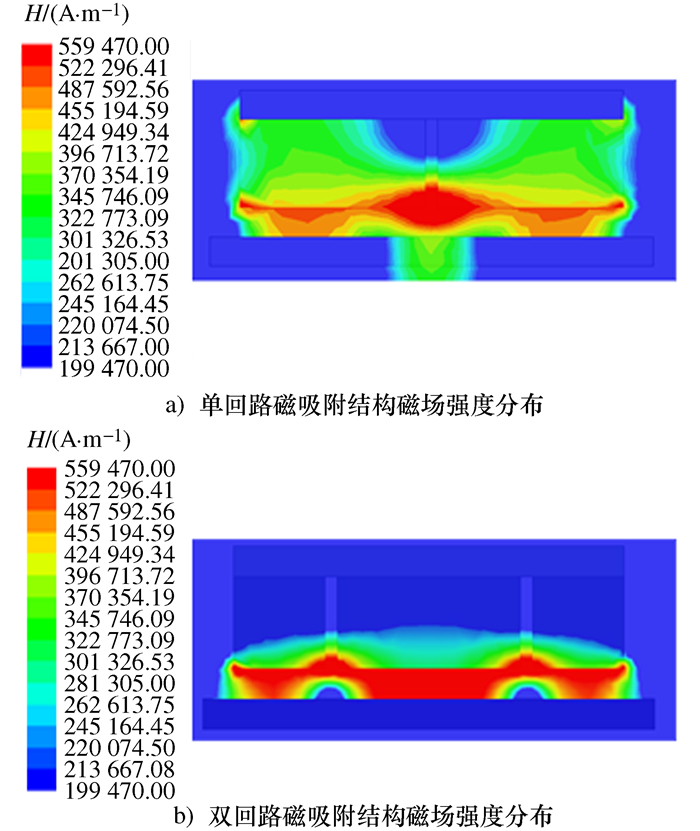
图 5 间隙式永磁吸附结构磁场强度分布图
Figure 5. Magnetic field intensity distribution of gap-type permanent magnet adsorption structure
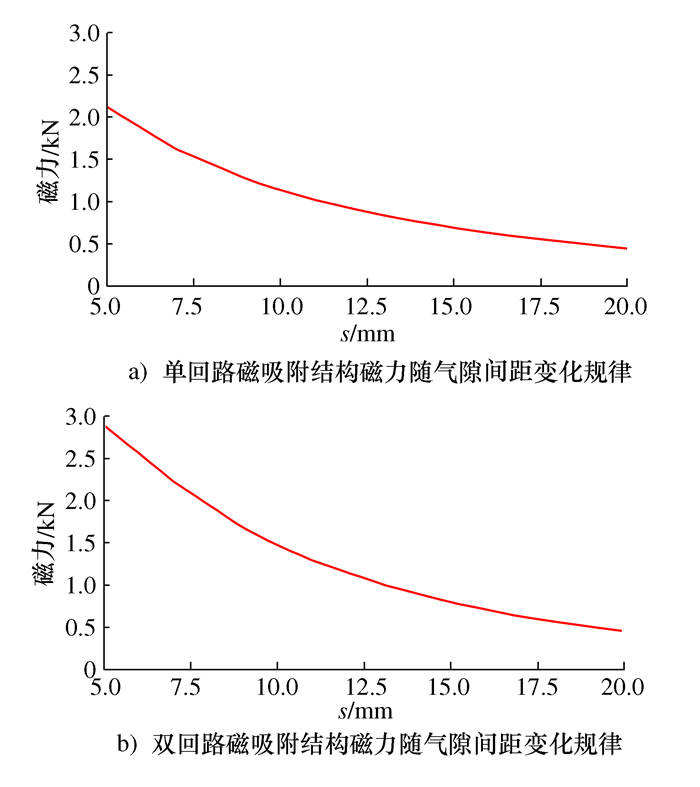
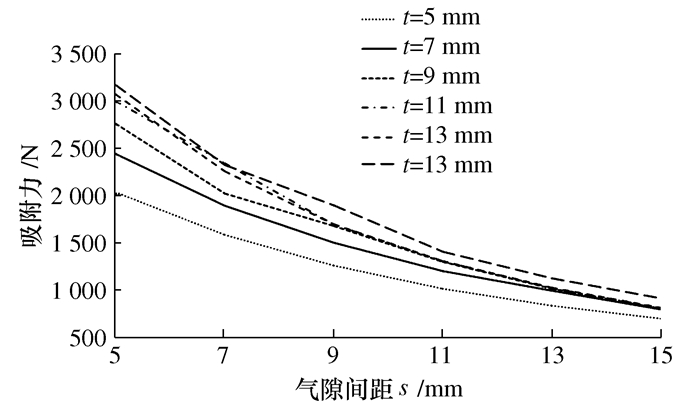
图 6 磁吸附力随气隙间距s变化规律图
Figure 6. Variation of magnetic adsorption force with air-gap spacing s
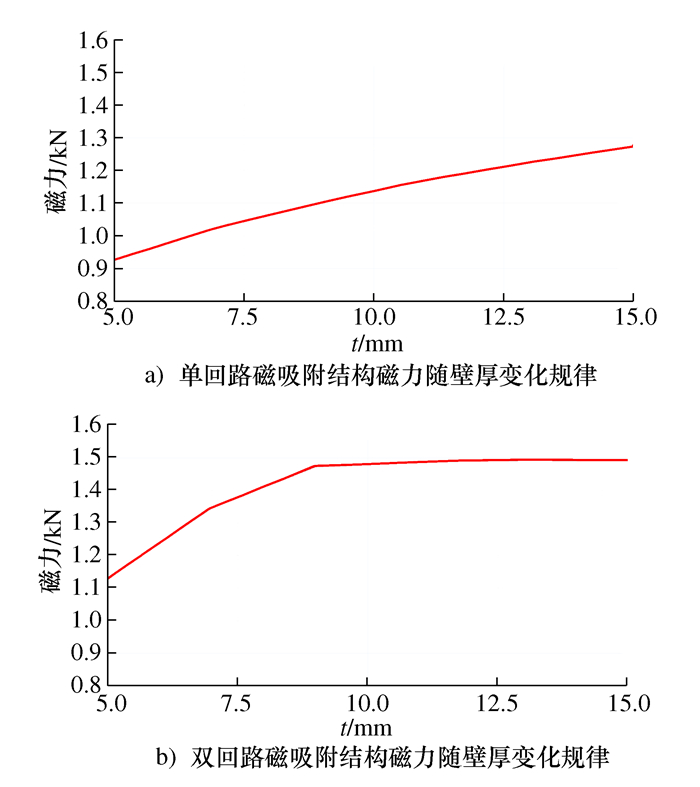
图 7 磁吸附力随壁厚t变化规律图
Figure 7. Variation of magnetic adsorption force with wall thickness t
表 1 永磁体结构参数
Table 1. Structural parameters of permanent magnet
参数 数值 剩余磁感应强度Br/T 1.30~1.35 矫顽力Hcb/(kA·m-1) 876~926 内禀矫顽力Hcj/(kA·m-1) ≥955 最大磁积能Bh, max/(kJ·m-3) 342~358 工作温度Tw/℃ ≤80  下载: 导出CSV
下载: 导出CSV
-
[1] ROSS B, BARES J, FROMME C. A semi-autonomous robot for stripping paint from large vessels[J]. The International Journal of Robotics Research, 2003, 22(7-8): 617-626. doi: 10.1177/02783649030227010 [2] NGUYEN S T, LA H M. A climbing robot for steel bridge inspection[J]. Journal of Intelligent & Robotic Systems, 2021, 102(4): 75. [3] 薛胜雄, 任启乐, 陈正文, 等. 磁隙式爬壁机器人的研制[J]. 机械工程学报, 2011, 47(21): 37-42. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201121007.htmXUE S X, REN Q L, CHEN Z W, et al. Design on magnetic gap adhesion typed crawler[J]. Journal of Mechanical Engineering, 2011, 47(21): 37-42. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201121007.htm [4] 衣正尧, 弓永军, 王祖温, 等. 新型船舶壁面除锈爬壁机器人动力学建模与分析[J]. 机械工程学报, 2010, 46(15): 23-30. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201015005.htmYI Z Y, GONG Y J, WANG Z W, et al. Dynamic modeling and analysis on a new type wall-climbing robot for ship wall rust removal[J]. Journal of Mechanical Engineering, 2010, 46(15): 23-30. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201015005.htm [5] WU M H, PAN G, ZHANG T, et al. Design and optimal research of a non-contact adjustable magnetic adhesion mechanism for a wall-climbing welding robot[J]. International Journal of Advanced Robotic Systems, 2013, 10: 63. doi: 10.5772/54008 [6] XU Y H, HE K, ZHAO W L, et al. A novel design of a wall-climbing robot and experimental study on magnetic wheels[C]//Proceedings of 2021 International Conference on Computer, Control and Robotics. Shanghai: IEEE, 2021: 60-65. [7] 宋伟, 姜红建, 王滔, 等. 爬壁机器人磁吸附组件优化设计与试验研究[J]. 浙江大学学报(工学版), 2018, 52(10): 1837-1844. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC201810001.htmSONG W, JIANG H J, WANG T, et al. Optimization design and experimental research on magnetic components for wall-climbing robot[J]. Journal of Zhejiang University (Engineering Science), 2018, 52(10): 1837-1844. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC201810001.htm [8] 蔡业彬. 模块化设计方法及其在机械设计中的应用[J]. 机械设计与制造, 2005(8): 154-156. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ200508073.htmCAI Y B. The method of modularization design and its application in machine design[J]. Machinery Design & Manufacture, 2005(8): 154-156. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ200508073.htm [9] 赵军友, 张亚宁, 毕晓东, 等. 喷砂除锈爬壁机器人磁吸附结构优化设计及整机性能试验[J]. 中国石油大学学报(自然科学版), 2020, 44(4): 94-99. https://www.cnki.com.cn/Article/CJFDTOTAL-SYDX202004012.htmZHAO J Y, ZHANG Y N, BI X D, et al. Optimum design of magnetic adsorption structure and machine performance test for sand blasting and rust-removing wall-climbing robot[J]. Journal of China University of Petroleum (Edition of Natural Science), 2020, 44(4): 94-99. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SYDX202004012.htm [10] LU Y, ZHOU K K, YE N J. Design and kinemics/dynamics analysis of a novel climbing robot with tri-planar limbs for remanufacturing[J]. Journal of Mechanical Science and Technology, 2017, 31(3): 1427-1436. doi: 10.1007/s12206-017-0243-9 [11] LI W F, OHKUBO T, HONO K. Effect of post-sinter annealing on the coercivity and microstructure of Nd-Fe-B permanent magnets[J]. Acta Materialia, 2009, 57(5): 1337-1346. doi: 10.1016/j.actamat.2008.11.019 [12] GAO S, HOU R L, LI J, et al. Magnetic field analysis and structure design of a new magnetic wheel for wall-climbing robot[J]. Journal of Superconductivity and Novel Magnetism, 2022, 35(2): 529-537. doi: 10.1007/s10948-021-06094-4 [13] HU S J, PENG R S, HE K, et al. Structural design and magnetic force analysis of a new crawler-type permanent magnetic adsorption wall-Climbing[C]//Proceedings of 2017 IEEE International Conference on Information and Automation. Macao, China: IEEE, 2017: 598-603. [14] 闫晨飞, 孙振国, 张文增, 等. 变磁化方向单元组合式永磁吸附装置优化设计[J]. 电工技术学报, 2016, 31(3): 188-194. https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201603024.htmYAN C F, SUN Z G, ZHANG W Z, et al. Optimization design of the unit combined permanent magnetic adsorption device with variable magnetization directions[J]. Transactions of China Electrotechnical Society, 2016, 31(3): 188-194. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201603024.htm [15] ZHAO Z H, TAO Y R, WANG J, et al. The multi-objective optimization design for the magnetic adsorption unit of wall-climbing robot[J]. Journal of Mechanical Science and Technology, 2022, 36(1): 305-316. doi: 10.1007/s12206-021-1228-2 [16] ZHANG Z P, HUANG X C, LIU H X, et al. Analysis on mechanics and magnetic adsorption of wheeled wall-climbing and obstacle-jumping robot[C]//Proceedings of 2021 China Automation Congress. Beijing, China: IEEE, 2021: 6306-6310. [17] LU X R, GUO D H, CHEN Y. Design and optimization of the magnetic adsorption mechanism of a pipeline-climbing robot[J]. Journal of Mechanical Science and Technology, 2021, 35(11): 5161-5171. doi: 10.1007/s12206-021-1033-y -


 点击查看大图
点击查看大图
计量
- 文章访问数: 8
- HTML全文浏览量: 3
- PDF下载量: 1
- 被引次数: 0
