




Inner Loop Damping and Iterative Learning Control of a Large Stroke Micro-positioning Stage Driven by Push-pull Electromagnetic Actuators
-
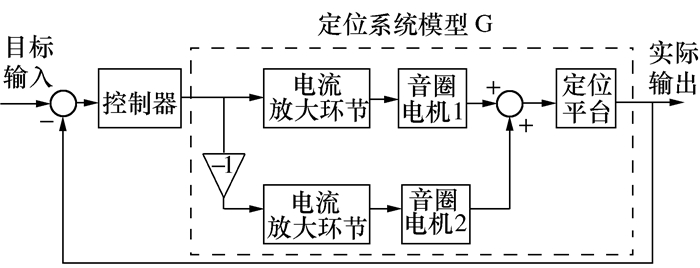
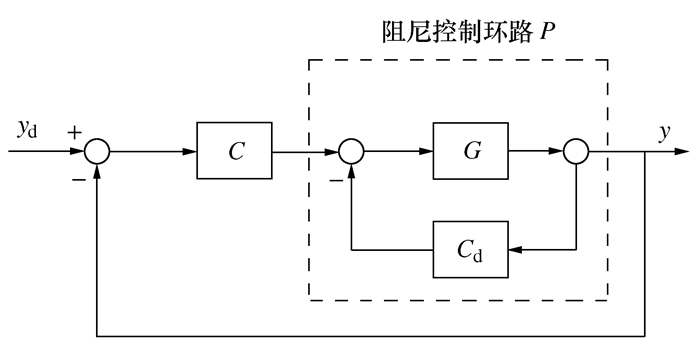
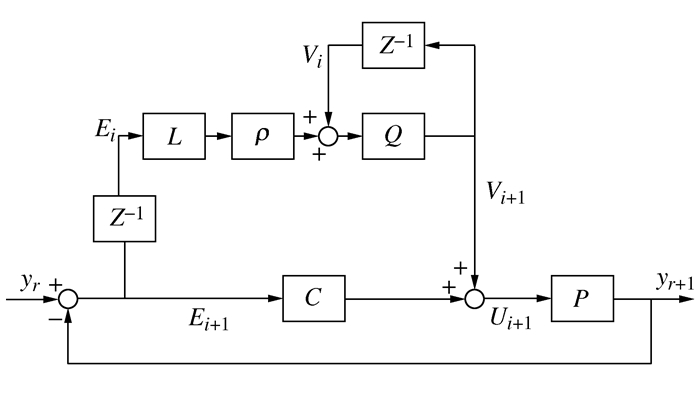
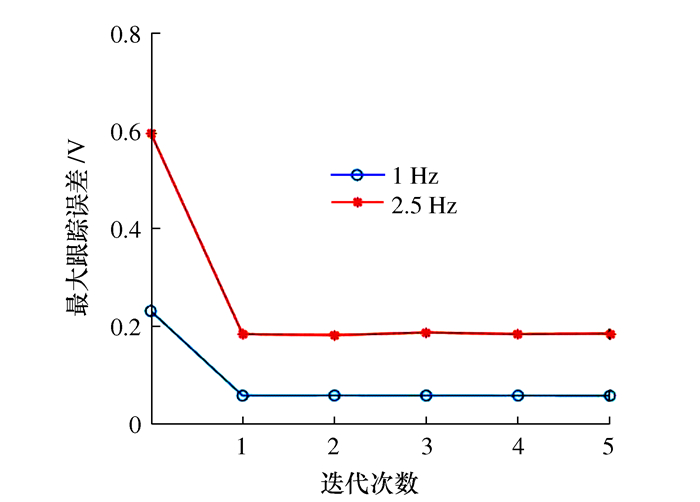
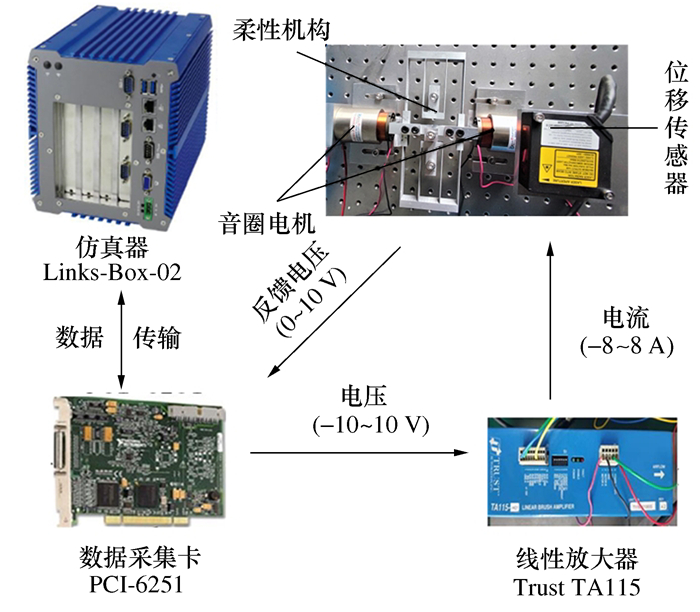
摘要: 为了解决音圈电机驱动柔性微定位平台驱动力小和低阻尼谐振等问题, 本文采用两侧音圈电机的推拉模式来提升驱动力的大小, 并且利用内环阻尼控制器结合迭代学习控制方法来实现平台的精准控制。首先, 搭建了互补配置的双音圈电机驱动双平行四边形柔性机构的微定位平台。其次, 设计了内环阻尼速度反馈控制器。然后, 采用逆模型迭代学习控制方法来进一步消除周期性的干扰和误差。最后进行了跟踪实验。结果表明: 在跟踪1 Hz和2.5 Hz的正弦波时, 相比于PI控制, 最大误差分别减少74.6%和68.6%, 满足微定位平台精准控制的要求。Abstract: In order to solve the problems of small driving force and low damping resonance of the flexure micro-positioning stage driven by voice coil motors (VCM), a push-pull mode of VCMs on both sides is adopted to enhance the driving force, and the inner loop damping controller combined with iterative learning control (ILC) method is used to realize the precise control of the stage. Firstly, a micro-positioning stage of compound parallelogram flexure mechanism driven by dual VCMs with complementary configuration is built. Secondly, an inner loop damping speed feedback controller is designed. Then, the inverse model ILC method is used to eliminate the periodic interference and error. Finally, the tracking experiment is carried out. The results show that when tracking the sine wave of 1 Hz and 2.5 Hz, the maximum error is reduced by 74.6% and 68.6% respectively compared with PI control, which meets the requirements of precise control of the micro-positioning stage.
-
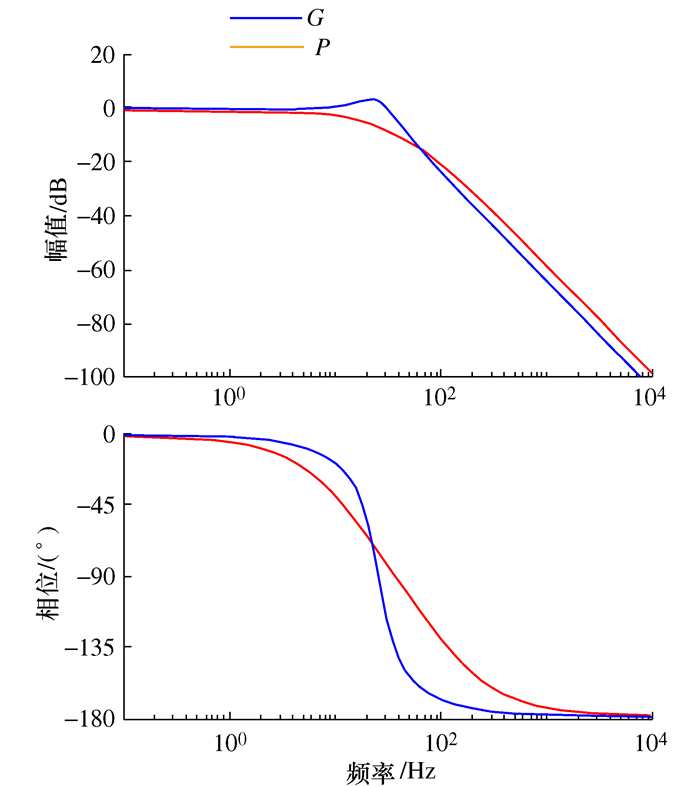
图 4 阻尼控制器加入前后系统的伯德图
Figure 4. The bode diagram of system before and after adding damping controller
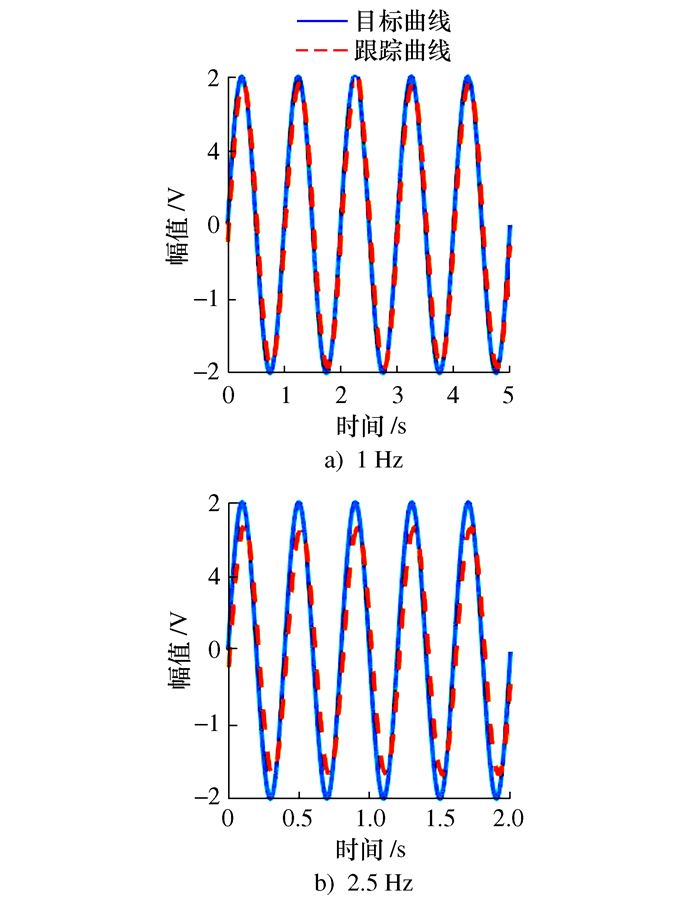
图 7 PI对1 Hz和2.5 Hz正弦信号的跟踪效果
Figure 7. The tracking effect of PI on 1 Hz and 2.5 Hz sine signals
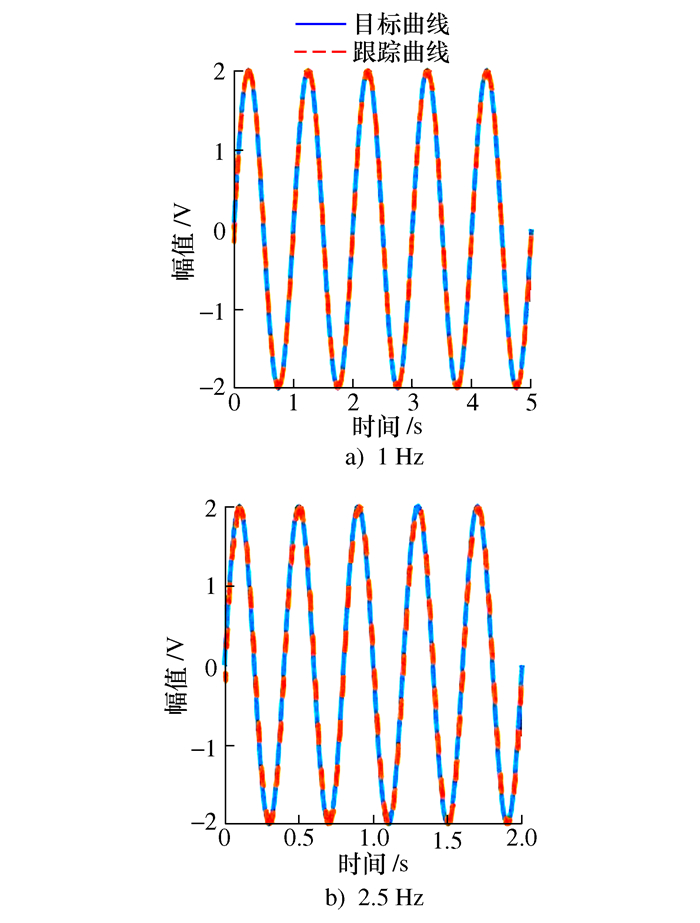
图 8 含PI的迭代控制对1 Hz和2.5 Hz正弦信号的跟踪效果
Figure 8. The tracking effect of iterative control with PI on 1 Hz and 2.5 Hz sine signals
-
[1] 莫喜先. 磁驱动纳米定位平台时滞控制方法及实验[D]. 上海: 上海交通大学, 2019.MO X X. Retarded control method and experiments on magnet-driven nanopositioning stage[D]. Shanghai: Shanghai Jiao Tong University, 2019. (in Chinese) [2] 贺云波, 曾志强, 张昌. 迭代学习在音圈电机轨迹跟踪中的应用研究[J]. 机械设计与制造, 2020(4): 258-261.HE Y B, ZENG Z Q, ZHANG C. Study on the application of iterative learning in the trajectory tracking of voice coil motor[J]. Machinery Design & Manufacture, 2020(4): 258-261. (in Chinese) [3] 王福超, 王昱棠, 田大鹏. 音圈快速反射镜的完全跟踪控制[J]. 光学精密工程, 2020, 28(9): 1997-2006.WANG F C, WANG Y T, TIAN D P. Perfect tracking control for fast-steering mirror driven by voice coil motor[J]. Optics and Precision Engineering, 2020, 28(9): 1997-2006. (in Chinese) [4] PARMAR G, BARTON K, AWTAR S. Large dynamic range nanopositioning using iterative learning control[J]. Precision Engineering, 2014, 38(1): 48-56. doi: 10.1016/j.precisioneng.2013.07.003 [5] ITO S, TROPPMAIR S, LINDNER B, et al. Long-range fast nanopositioner using nonlinearities of hybrid reluctance actuator for energy efficiency[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3051-3059. doi: 10.1109/TIE.2018.2842735 [6] CAI K H, TIAN Y L, LIU X P, et al. Development and control methodologies for 2-DOF micro/nano positioning stage with high out-of-plane payload capacity[J]. Robotics and Computer-Integrated Manufacturing, 2019, 56: 95-105. doi: 10.1016/j.rcim.2018.08.007 [7] OKYAY A, ERKORKMAZ K, KHAMESEE M B. Mechatronic design, actuator optimization, and control of a long stroke linear nano-positioner[J]. Precision Engineering, 2018, 52: 308-322. doi: 10.1016/j.precisioneng.2018.01.007 [8] NIKOOIENEJAD N, ALIPOUR A, MAROUFI M, et al. Video-rate non-raster AFM imaging with cycloid trajectory[J]. IEEE Transactions on Control Systems Technology, 2020, 28(2): 436-447. doi: 10.1109/TCST.2018.2879939 [9] 吴文鹏, 王一帆, 胡贞. 微纳操纵成像迭代学习前馈反馈控制研究[J]. 机械科学与技术, 2022, 41(3): 414-420. doi: 10.13433/j.cnki.1003-8728.20200360 WU W P, WANG Y F, HU Z. Exploring a feedforward and feedback control method for iterative learning by micro-nano manipulative imaging system[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(3): 414-420. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20200360 [10] 陈国真, 徐斯强, 刘品宽, 等. 大行程快速反射镜的结构设计及带宽特性[J]. 光学精密工程, 2020, 28(1): 90-101.CHEN G Z, XU S Q, LIU P K, et al. Structural design and bandwidth characteristic of a fast steering mirror with large travel range[J]. Optics and Precision Engineering, 2020, 28(1): 90-101. (in Chinese) [11] 戴一帆, 段纬然, 王贵林, 等. 音圈电机驱动的快刀伺服系统建模与性能分析[J]. 国防科技大学学报, 2008, 30(1): 78-82.DAI Y F, DUAN W R, WANG G L, et al. Study on modeling and performance of a fast tool servo system driven by voice coil motor[J]. Journal of National University of Defense Technology, 2008, 30(1): 78-82. (in Chinese) [12] ZHANG Z, YANG X D, YAN P. Large dynamic range tracking of an XY compliant nanomanipulator with cross-axis coupling reduction[J]. Mechanical Systems and Signal Processing, 2019, 117: 757-770. doi: 10.1016/j.ymssp.2018.08.014 [13] XU Q S. New flexure parallel-kinematic micropositioning system with large workspace[J]. IEEE Transactions on Robotics, 2012, 28(2): 478-491. doi: 10.1109/TRO.2011.2173853 [14] TIAN Y L, CAI K H, ZHANG D W, et al. Development of a XYZ scanner for home-made atomic force microscope based on FPAA control[J]. Mechanical Systems and Signal Processing, 2019, 131: 222-242. doi: 10.1016/j.ymssp.2019.05.057 [15] KANG S, LEE M G, CHOI Y M. Six degrees-of- freedom direct-driven nanopositioning stage using crab-leg flexures[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(2): 513-525. doi: 10.1109/TMECH.2020.2972301 -

 下载:
下载:
 点击查看大图
点击查看大图
图(9)
计量
- 文章访问数: 8
- HTML全文浏览量: 4
- PDF下载量: 0
- 被引次数: 0
