




An Improved Lateral Path Tracking Controller Based on Linear Quadratic Regulator
-
摘要: 路径跟踪在自动驾驶中起着至关重要的作用。为了保证控制器的实时性并提高路径跟踪控制器的稳定性和自适应性,提出了一种基于改进的LQR算法的横向路径控制策略。首先将汽车的动力学模型拆解为横向误差动力学模型,并以此模型设计了前馈+反馈的离散LQR控制器。然后采用模糊控制方法实时根据车辆状态调整LQR的权重系数。此外,为了降低控制器的计算量,设计了基于余弦相似度的更新机制。最后,通过Simulink-Carsim平台对改进的LQR控制器进行双移线路况测试。结果表明,该控制算法在跟踪精度和计算效率方面得到了较大的改善。
-
关键词:
- 路径跟踪 /
- 线性二次型调节器(LQR) /
- 拉格朗日乘数法 /
- 权重自适应控制 /
- 余弦相似度
Abstract: Path tracking plays an indispensable role in the autonomous driving of a vehicle. In order to ensure the real-time performance of the path tracking controller and improve its stability and adaptability, we improved a lateral path tracking controller based on the linear quadratic regulator (LQR). Firstly, we transform the vehicle′s dynamics model into a lateral error dynamics model. Based on this model, a feedforward plus feedback discrete LQR controller is designed. Then, the fuzzy control method is used to adjust the weighted coefficient of the LQR in real time according to the vehicle′s state. In addition, an update mechanism based on the cosine similarity is designed to reduce the calculation volume of the controller. Finally, the improved lateral path tracking controller was tested on the double change lane path through the Simulink-Carsim platform. The test results show that the controller dramatically improves the tracking accuracy, steering stability, and calculation efficiency. -
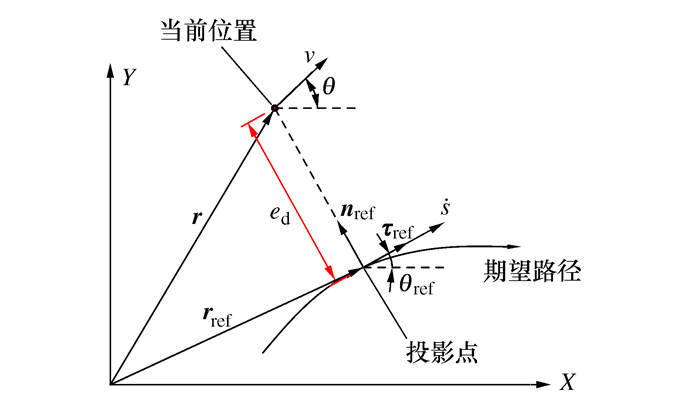
图 2 当前位置和期望路径之间的误差示意图
Figure 2. Demonstrated picture for the error between current position and expected path
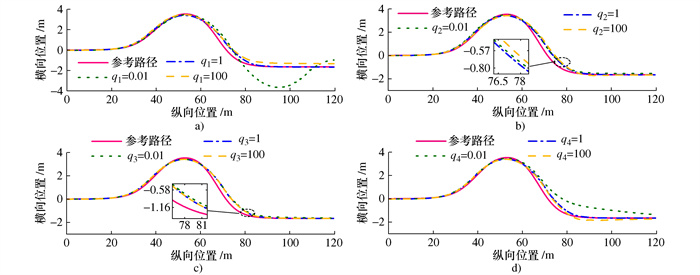
图 4 不同权重系数q1, q2, q3, q4下路径跟踪的结果
Figure 4. The results of path tracking in different weight coefficients q1, q2, q3, q4
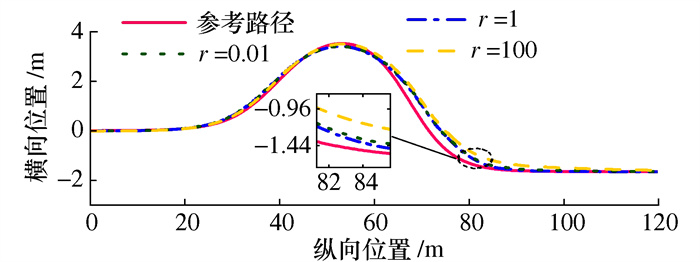
图 5 不同权重系数r下路径跟踪的结果
Figure 5. The result of path tracking in different weight coefficient r
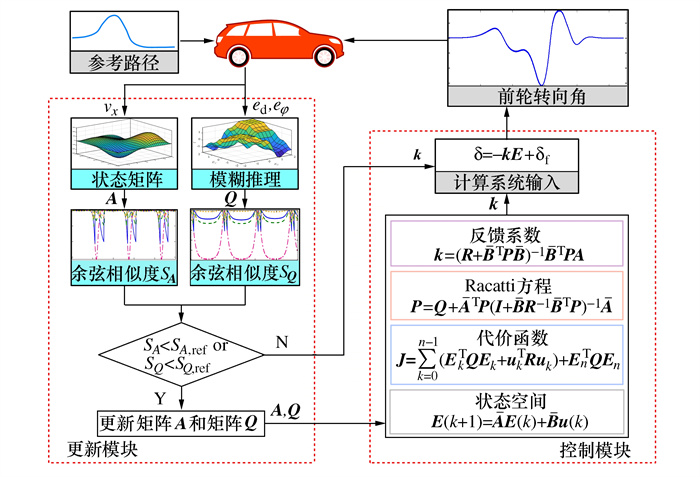
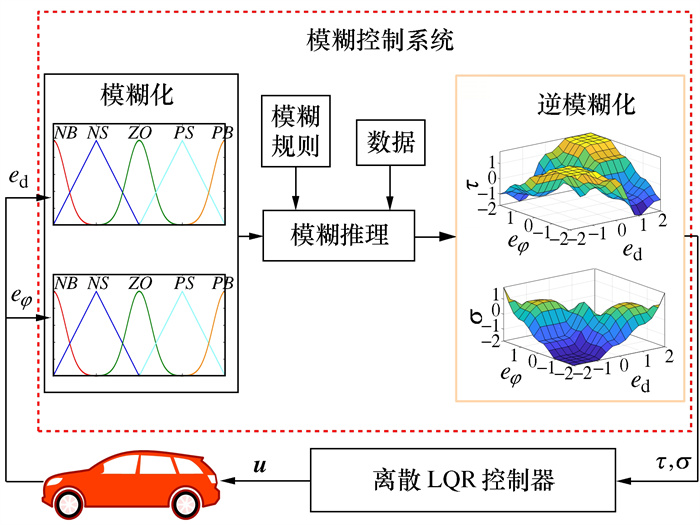
图 6 基于模糊控制和余弦相似度的LQR横向路径跟踪控制器框架
Figure 6. LQR lateral path tracking controller based on the fuzzy control and cosine similarity degree
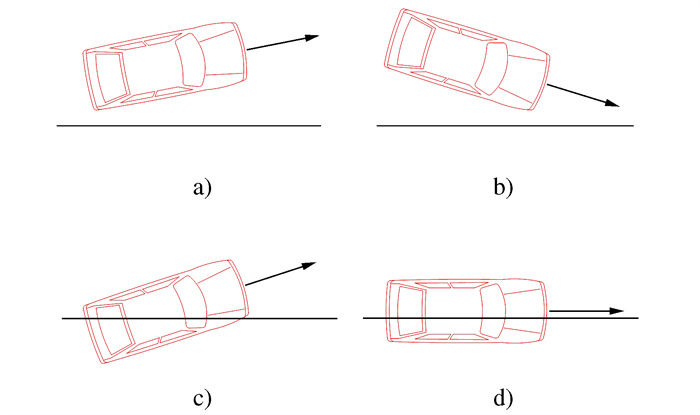
图 8 车辆在不同横向误差和偏航误差下的位置示意图
Figure 8. The positions of the vehicle under different lateral error and yaw error
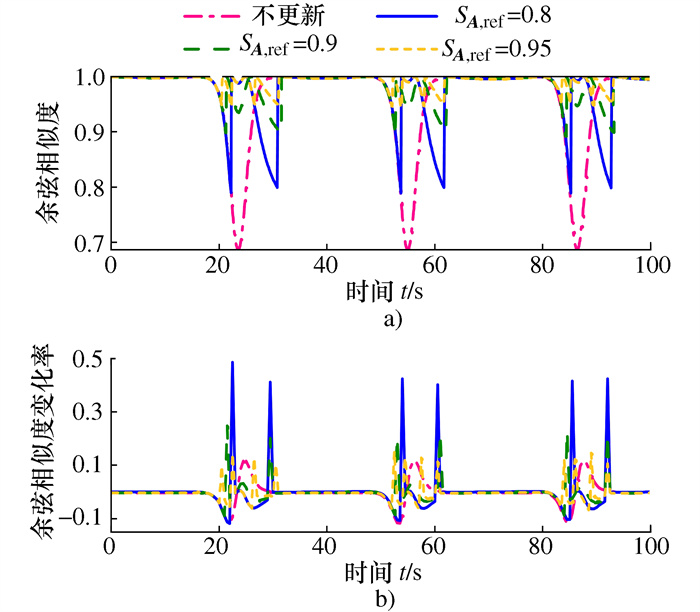
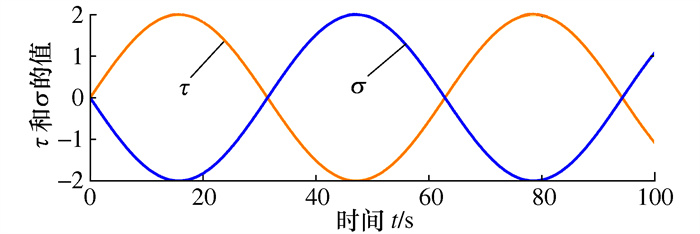
图 12 在正弦输入下状态矩阵A的余弦相似度及变化率
Figure 12. Cosine similarity degree and rate of change of state matrix A under sinusoidal input
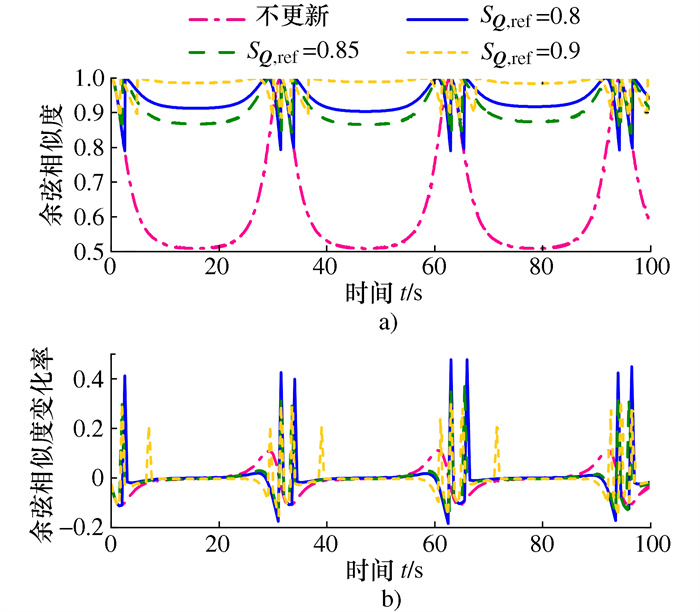
图 14 在正弦输入下权重系数矩阵Q的余弦相似度及变化率
Figure 14. Cosine similarity and rate of change of weight coefficient matrix Q under sinusoidal input
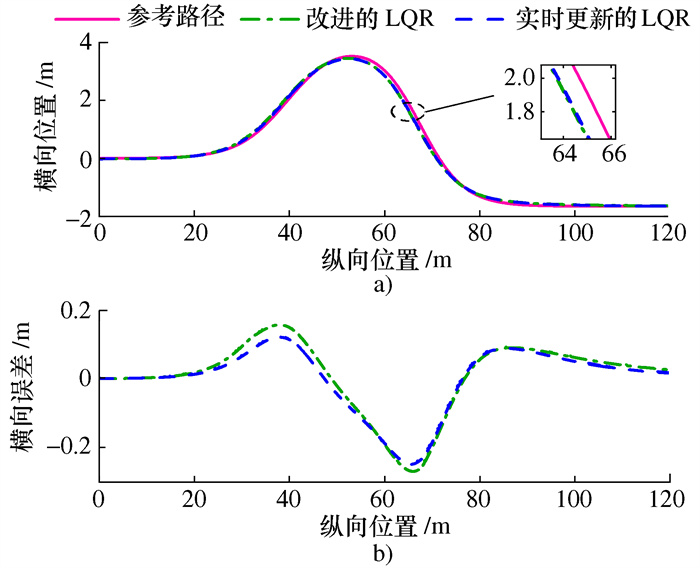
图 15 在15 m/s速度下改进的LQR控制器和实时更新的LQR控制器的路径跟踪结果
Figure 15. Path tracking results of improved LQR controller and real-time updated LQR controller at 15 m/s speed
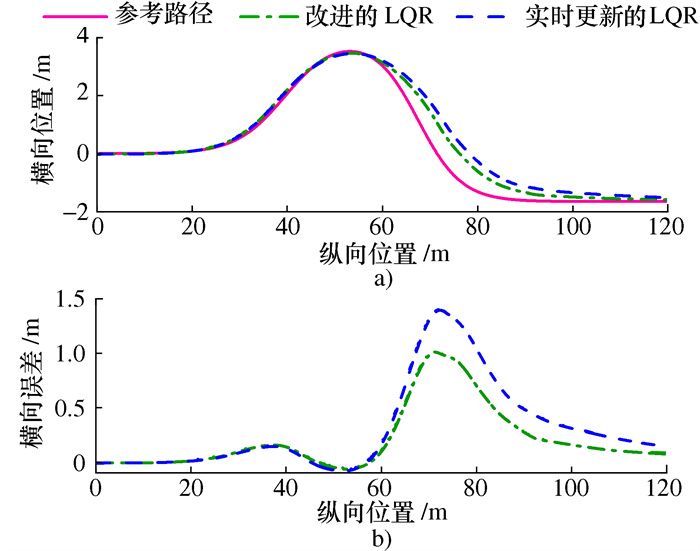
图 16 在25 m/s速度下改进的LQR控制器和实时更新的LQR控制器的路径跟踪结果
Figure 16. Path tracking results of improved LQR controller and real-time updated LQR controller at 25 m/s speed

图 17 改进的LQR控制器和实时更新的LQR控制器的运行时间
Figure 17. Improved LQR controller and real-time updated LQR controller operation time
表 1 τ的模糊规则
Table 1. Fuzzy rule of τ
τ eφ NB NS ZO PS PB ed NB PB PB PS ZO NS NS PB PB PS NS NB ZO PS ZO NS ZO PS PS NB NS PS PB PB PB NS ZO PS PB PB  下载: 导出CSV
下载: 导出CSV
表 2 σ的模糊规则
Table 2. Fuzzy rule of σ
σ eφ NB NS ZO PS PB ed NB NB NB NS ZO PB NS NB NB NS PS ZO ZO NS ZO PS ZO NS PS ZO PS NS NB NB PB PB ZO NS NB NB
下载: 导出CSV
表 3 仿真参数
Table 3. Parameters for simulation
参数 数值 整车质量m/kg 1 412 z轴的转动惯量Iz/(kg·m2) 1 536.7 质心到前轴距离lf/m 1.015 质心到后轴距离lr/m 1.895 前轮侧偏刚度Cαf/(N·rad-1) -148 970 后轮侧偏刚度Cαr/(N·rad-1) -82 204 输入的权重系数r 20
下载: 导出CSV
-
[1] GREENBLATT N A. Self-driving cars and the law[J]. IEEE Spectrum, 2016, 53(2): 46-51. doi: 10.1109/MSPEC.2016.7419800 [2] JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. doi: 10.1109/TVT.2016.2555853 [3] HU C, GAO H B, GUO J H, et al. Rise-based integrated motion control of autonomous ground vehicles with asymptotic prescribed performance[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(9): 5336-5348. doi: 10.1109/TSMC.2019.2950468 [4] RIBEIRO A M, FIORAVANTI A R, MOUTINHO A, et al. Nonlinear state-feedback design for vehicle lateral control using sum-of-squares programming[J]. Vehicle System Dynamics, 2022, 60(3): 743-769. doi: 10.1080/00423114.2020.1844905 [5] ANDO T, KUGIMIYA W, HASHIMOTO T, et al. Lateral control in precision docking using RTK-GNSS/INS and LiDAR for localization[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(1): 78-87. doi: 10.1109/TIV.2020.2992857 [6] CHEN Q Y, SUN Z P, LIU D X, et al. Ribbon model based path tracking method for autonomous ground vehicles[J]. Journal of Central South University, 2014, 21(5): 1816-1826. doi: 10.1007/s11771-014-2127-9 [7] THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of field Robotics, 2006, 23(9): 661-692. doi: 10.1002/rob.20147 [8] NORMEY-RICO J E, ALCALÁI, GÕMEZ-ORTEGA J, et al. Mobile robot path tracking using a robust pid controller[J]. Control Engineering Practice, 2001, 9(11): 1209-1214. doi: 10.1016/S0967-0661(01)00066-1 [9] ZHANG X Z, ZHU X L. Autonomous path tracking control of intelligent electric vehicles based on lane detection and optimal preview method[J]. Expert Systems with Applications, 2019, 121: 38-48. doi: 10.1016/j.eswa.2018.12.005 [10] HU C, CHEN Y M, WANG J M. Fuzzy observer-based transitional path-tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(5): 3078-3088. doi: 10.1109/TITS.2020.2979431 [11] HU C, WANG Z F, QIN Y C, et al. Lane keeping control of autonomous vehicles with prescribed performance considering the rollover prevention and input saturation[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(7): 3091-3103. doi: 10.1109/TITS.2019.2924937 [12] GUO N Y, LENZO B, ZHANG X D, et al. A real-time nonlinear model predictive controller for yaw motion optimization of distributed drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(5): 4935-4946. doi: 10.1109/TVT.2020.2980169 [13] SHARP R S, PENG H. Vehicle dynamics applications of optimal control theory[J]. Vehicle System Dynamics, 2011, 49(7): 1073-1111. doi: 10.1080/00423114.2011.586707 [14] SNIDER J M. Automatic steering methods for autonomous automobile path tracking[D]. Pittsburgh: Carnegie Mellon University, 2009. [15] KAPANIA N R, GERDES J C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling[J]. Vehicle System Dynamics, 2015, 53(12): 1687-1704. doi: 10.1080/00423114.2015.1055279 [16] XU S B, PENG H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 48-58. doi: 10.1109/TITS.2019.2892926 [17] 高琳琳, 唐风敏, 郭蓬, 等. 自动驾驶横向运动控制的改进LQR方法研究[J]. 机械科学与技术, 2021, 40(3): 435-441. doi: 10.13433/j.cnki.1003-8728.20200066GAO L L, TANG F M, GUO P, et al. Research on improved LQR control for self-driving vehicle lateral motion[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(3): 435-441. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20200066 [18] HE W, CHEN Y H, YIN Z. Adaptive neural network control of an uncertain robot with full-state constraints[J]. IEEE Transactions on Cybernetics, 2016, 46(3): 620-629. doi: 10.1109/TCYB.2015.2411285 [19] ONIEVA E, NARANJO J E, MILANÉS V, et al. Automatic lateral control for unmanned vehicles via genetic algorithms[J]. Applied Soft Computing, 2011, 11(1): 1303-1309. doi: 10.1016/j.asoc.2010.04.003 [20] YUAN X F, HUANG G M, SHI K. Improved adaptive path following control system for autonomous vehicle in different velocities[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(8): 3247-3256. doi: 10.1109/TITS.2019.2925026 -



 点击查看大图
点击查看大图
计量
- 文章访问数: 134
- HTML全文浏览量: 153
- PDF下载量: 19
- 被引次数: 0
