




State Estimation of Intelligent Electric Vehicle Considering Online Updating of Tire Cornering Stiffness
-
摘要: 实时准确地估计车辆行驶状态是汽车智能化发展的前提,而现有的研究通常忽略了轮胎侧偏刚度的时变特性,在整车模型中引入线性轮胎模型严重影响到极限工况下车辆状态的估计精度。基于此,提出了一种轮胎侧偏刚度在线更新的智能电动汽车纵向车速、横摆角速度和质心侧偏角的估计算法。基于模糊自适应扩展卡尔曼滤波算法(FAEKF) 建立了车辆状态估计模型,采用模糊控制器对扩展卡尔曼滤波中含观测噪声协方差的卡尔曼增益矩阵进行实时调节,达到算法的自适应效果。以带遗忘因子递推最小二乘法(FFRLS) 为基础建立了轮胎侧偏刚度估计模型。将两种算法以嵌入式的方式结合提出FAEKF+FFRLS算法,更好地实现了状态与参数联合估计和互相校正,通过Trucksim和MATLAB/Simulink联合仿真对算法进行了验证。结果表明: 相比于标准的EKF算法,所提出的状态估计算法具有更高的精度,更好的稳定性和鲁棒性。Abstract: The real-time and accurate estimation of vehicle states is the premise of vehicle intelligence development. However, the existing researches usually ignore the time-varying characteristics of tire cornering stiffness, and introducing linear tire model into vehicle model seriously affects the estimation accuracy of vehicle states under extreme conditions. An algorithm for estimating intelligent electric vehicle longitudinal speed, yaw rate and sideslip angle of vehicle mass center with tire cornering stiffness updated online is proposed. Based on the fuzzy adaptive extended Kalman filter (FAEKF), the vehicle state estimation model is established. The fuzzy controller is used to adjust the Kalman gain matrix including the covariance of observation noise in EKF algorithm in real time to achieve the adaptive effect of the algorithm. Using the forgetting-factor recursive least square method (FFRLS), the estimation model of tire cornering stiffness is established. A new FAEKF+FFRLS algorithm is proposed by combining the two algorithms in an embedded way, which can better realize the joint estimation and mutual correction of states and parameters. The algorithm is verified by co-simulation Trucksim and MATLAB/Simulink. The results show that compared with the standard EKF algorithm, the proposed state estimation algorithm has higher accuracy, better stability and robustness.
-
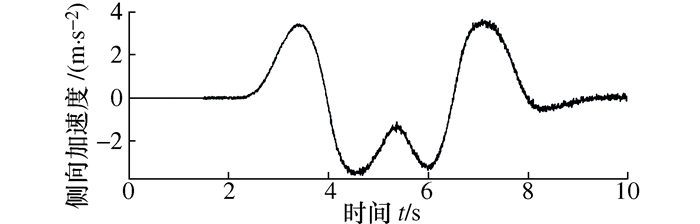
图 5 含时变噪声的侧向加速度(工况2)
Figure 5. Lateral acceleration with time-varying noise (operating condition 2)
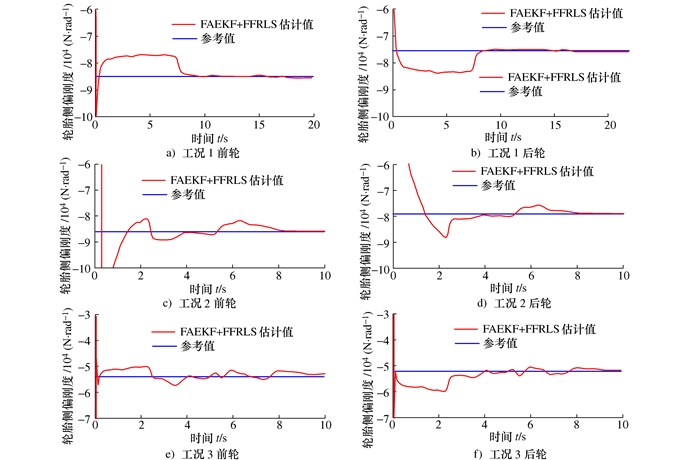
图 6 轮胎侧偏刚度估计值与参考值
Figure 6. Estimated and reference values of tire cornering stiffness

图 7 纵向车速估计结果对比
Figure 7. Comparison of estimated results of longitudinal vehicle speed
表 1 整车参数
Table 1. Vehicle parameters
车辆模型参数 数值 整车质量m/kg 1 787 质心高度h/mm 587 质心到前轴的距离a/mm 1 514 质心到后轴的距离b/mm 1 836 横摆转动惯量Iz/(kg·m2) 4 415 车轮转动惯量Iw/(kg·m2) 3 车轮滚动半径Rw/mm 357 电机传动系效率η 0.9 减速器传动比ξ 6  下载: 导出CSV
下载: 导出CSV
表 2 轮胎侧偏刚度参考值
Table 2. Reference values of tire cornering stiffness
工况 前轮侧偏刚度/(N·rad-1) 后轮侧偏刚度/(N·rad-1) 1 -84 810 -75 400 2 -85 910 -79 110 3 -53 960 -52 110
下载: 导出CSV
表 3 估计值的相对误差
工况 算法 相对误差/% 横摆角速度 质心侧偏角 1 FAEKF+FFRLS 0.63 1.47 EKF 7.98 4.93 2 FAEKF+FFRLS 2.50 4.91 EKF 15.84 15.21 3 FAEKF+FFRLS 3.88 5.36 EKF 10.09 41.00
下载: 导出CSV
-
[1] REN D B, ZHANG J Y, ZHANG J M, et al. Trajectory planning and yaw rate tracking control for lane changing of intelligent vehicle on curved road[J]. Science China Technological Sciences, 2011, 54(3): 630-642. doi: 10.1007/s11431-010-4227-6 [2] ANANDHALLI M, BALIGAR V P. A novel approach in real-time vehicle detection and tracking using Raspberry Pi[J]. Alexandria Engineering Journal, 2018, 57(3): 1597-1607. doi: 10.1016/j.aej.2017.06.008 [3] EIDFELD H, SCHVNEMANN M, KASPER R. UKF-based State and tire slip estimation for a 4WD electric vehicle[J]. Vehicle System Dynamics, 2020, 58(10): 1479-1496. doi: 10.1080/00423114.2019.1648836 [4] 郝亮, 郭立新. 自适应软测量算法的汽车行驶状态估计[J]. 东北大学学报(自然科学版), 2019, 40(1): 70-76.HAO L, GUO L X. Vehicle driving state estimation of the adaptive soft-sensing algorithm[J]. Journal of Northeastern University (Natural Science), 2019, 40(1): 70-76. (in Chinese) [5] 戴一凡. 分布式电驱动车辆纵横向运动综合控制[D]. 北京: 清华大学, 2013.DAI Y F. Integrated longitudinal and lateral motion control of distributed electric vehicles[D]. Beijing: Tsinghua University, 2013. (in Chinese) [6] KATRINIOK A, ABEL D. Adaptive EKF-based vehicle state estimation with online assessment of local observability[J]. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1368-1381. doi: 10.1109/TCST.2015.2488597 [7] BOADA B L, BOADA M J L, DIAZ V. Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an Unscented Kalman Filter algorithm[J]. Mechanical Systems and Signal Processing, 2016, 72-73: 832-845. doi: 10.1016/j.ymssp.2015.11.003 [8] 王震坡, 薛雪, 王亚超. 基于自适应无迹卡尔曼滤波的分布式驱动电动汽车车辆状态参数估计[J]. 北京理工大学学报, 2018, 38(7): 698-702.WANG Z P, XUE X, WANG Y C. State parameter estimation of distributed drive electric vehicle based on adaptive unscented Kalman filter[J]. Transactions of Beijing Institute of Technology, 2018, 38(7): 698-702. (in Chinese) [9] 方贤生, 高秀琴, 罗良铨, 等. 基于模糊自适应无迹Kalman滤波的车辆状态参数估计[J]. 现代制造工程, 2020(7): 25-30.FANG X S, GAO X Q, LUO L Q, et al. Vehicle state parameter estimation based on fuzzy adaptive unscented Kalman filter[J]. Modern Manufacturing Engineering, 2020(7): 25-30. (in Chinese) [10] 冯亦奇, 陈勇. 基于遗忘因子的UKF车辆状态参数估计算法[J]. 合肥工业大学学报(自然科学版), 2020, 43(11): 1450-1455.FENG Y Q, CHEN Y. Unscented Kalman filter for vehicle state parameter estimation based on forgetting factor[J]. Journal of Hefei University of Technology (Natural Science), 2020, 43(11): 1450-1455. (in Chinese) [11] 张志达, 郑玲, 吴行, 等. 基于鲁棒自适应UKF的分布式电动汽车状态估计[J]. 中国科学: 技术科学, 2020, 50(11): 1461-1473.ZHANG Z D, ZHENG L, WU H, et al. State estimation of distributed electric vehicle based on robust adaptive UKF[J]. SCIENTIA SINICA Technologica, 2020, 50(11): 1461-1473. (in Chinese) [12] RODRIGO MARCO V, KALKKUHL J, RAISCH J, et al. Multi-modal sensor fusion for highly accurate vehicle motion state estimation[J]. Control Engineering Practice, 2020, 100: 104409. doi: 10.1016/j.conengprac.2020.104409 [13] 陈瑶. 轮毂电机驱动电动汽车状态和参数估计方法研究[D]. 重庆: 重庆大学, 2014.CHEN Y. Study on methods of states and parameters estimation for in-wheel motor drive electric vehicle[D]. Chongqing: Chongqing University, 2014. (in Chinese) [14] 陆辉, 王文婧. 基于双扩展卡尔曼滤波器的汽车轮胎侧向力与侧偏刚度估计[J]. 机电一体化, 2016, 22(9): 39-43.LU H, WANG W J. Estimation of tyre lateral forces and cornering stiffness based on dual extended Kalman filter[J]. Mechatronics, 2016, 22(9): 39-43. (in Chinese) [15] 罗文发, 吴光强, 郑松林. 基于HSRI模型的参数自适应质心侧偏角观测器的设计[J]. 汽车工程, 2013, 35(3): 249-255.LUO W F, WU G Q, ZHENG S L. Design of vehicle sideslip angle observer with parameter adaptation based on HSRI tire model[J]. Automotive Engineering, 2013, 35(3): 249-255. (in Chinese) [16] 周聪, 肖建. 基于自适应强跟踪滤波器的汽车行驶状态软测量[J]. 电机与控制学报, 2012, 16(2): 96-101.ZHOU C, XIAO J. Soft computing for vehicle state estimation based on adaptive strong track filter[J]. Electric Machines and Control, 2012, 16(2): 96-101. (in Chinese) [17] 林棻, 张华达, 赵又群, 等. 基于轮胎侧偏刚度估计的路面附着条件辨识[J]. 华南理工大学学报(自然科学版), 2019, 47(11): 16-24.LIN F, ZHANG H D, ZHAO Y Q, et al. Road friction condition identification based on tire lateral stiffness estimation[J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(11): 16-24. (in Chinese) [18] 张志勇, 张淑芝, 黄彩霞, 等. 基于自适应扩展卡尔曼滤波的分布式驱动电动汽车状态估计[J]. 机械工程学报, 2019, 55(6): 156-165.ZHANG Z Y, ZHANG S Z, HUANG C X, et al. State estimation of distributed drive electric vehicle based on adaptive extended Kalman filter[J]. Journal of Mechanical Engineering, 2019, 55(6): 156-165. (in Chinese) [19] 李鲁明, 赵鲁阳, 唐晓红, 等. 基于模糊卡尔曼滤波的姿态估计算法[J]. 仪表技术与传感器, 2019(4): 100-105.LI L M, ZHAO L Y, TANG X H, et al. Attitude estimation algorithm based on fuzzy Kalman filter[J]. Instrument Technique and Sensor, 2019(4): 100-105. (in Chinese) [20] 王志福, 刘明春, 周杨. 基于模糊扩展卡尔曼滤波的轮毂电机驱动车辆纵向速度估计算法[J]. 西南交通大学学报, 2015, 50(6): 1094-1099.WANG Z F, LIU M C, ZHOU Y. Estimation of longitudinal speed of in-wheel motor driven vehicle using fuzzy extended Kalman filter[J]. Journal of Southwest Jiaotong University, 2015, 50(6): 1094-1099. (in Chinese) [21] 张一西, 马建, 赵轩, 等. 基于蚁狮算法的UKF车辆状态参数估计器[J]. 中国公路学报, 2020, 33(5): 165-177.ZHANG Y X, MA J, ZHAO X, et al. Unscented Kalman filter estimator of vehicle states and parameters based on ant lion optimization algorithm[J]. China Journal of Highway and Transport, 2020, 33(5): 165-177. (in Chinese) [22] 褚文博, 罗禹贡, 罗剑, 等. 电驱动车辆的整车质量与路面坡度估计[J]. 清华大学学报(自然科学版), 2014, 54(6): 724-728.CHU W B, LUO Y G, LUO J, et al. Vehicle mass and road slope estimates for electric vehicles[J]. Journal of Tsinghua University (Science and Technology), 2014, 54(6): 724-728. (in Chinese) -



 点击查看大图
点击查看大图

计量
- 文章访问数: 181
- HTML全文浏览量: 108
- PDF下载量: 22
- 被引次数: 0
