




Research on Lateral Tracking Control of Low Speed Intelligent Vehicle Using Dynamic Path Preview Model
-
摘要: 采用速度自适应的动态预瞄距离是提高智能车侧向跟踪控制效果的有效办法。针对目前基本采用基于当前车速的预瞄距离自适应策略,提出一种结合规划路径和规划速度信息的动态预瞄距离跟踪控制算法以提高智能车在低速侧向跟踪控制的精确性。本文以几何学纯跟踪算法为基础,推导了前行和倒车时的侧向跟踪控制律;依据实时规划的路径和速度信息,设计了预瞄距离动态调整方法,最终获取具有速度自适应性的前视距离-车辆前轮转角关系。最后,在CarSim-MATLAB/Simulink联合仿真环境下验证了算法的有效性和准确性,并通过实车测试,验证了所提出的方法较基于动力学模型的LQR算法具有更低计算消耗和更高跟踪精度。Abstract: Speed adaptive dynamic preview distance is an effective way to improve the lateral tracking control effect of intelligent vehicle, and as for the problem of using current vehicle speed for the preview distance, a dynamic preview distance tracking control algorithm combining planned path and planned speed information is proposed to improve the accuracy of path tracking at low speed. Based on the pure pursue algorithm, the lateral tracking control laws of moving forward and reversing are derived. According to the real-time planned path and speed information, a dynamic adjustment method of preview distance was designed, and the relationship between the preview distance and the steering angle with speed adaptability was thereby obtained. Finally, the effectiveness and accuracy of the proposed algorithm were verified in CarSim-MATLAB/Simulink co-simulation environment, and a real vehicle test was performed, indicating that the proposed algorithm has lower computational consumption and higher tracking accuracy than the LQR algorithm based on dynamics model.
-
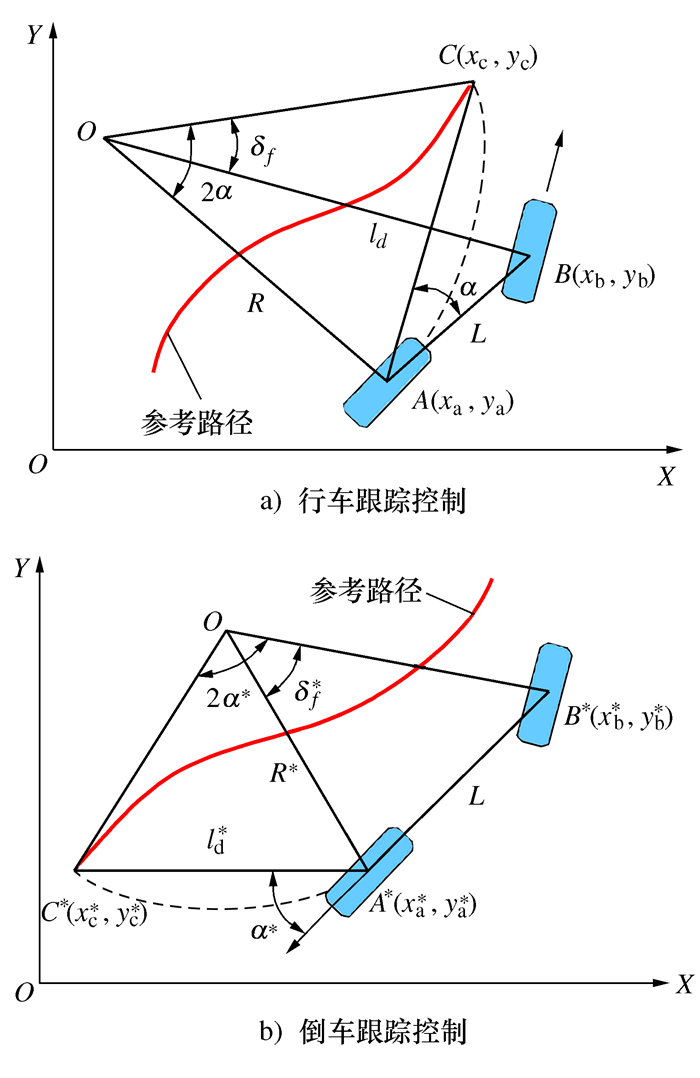
图 1 行车和倒车控制分析
Figure 1. Analysis of travel and reverse control for intelligent vehicle
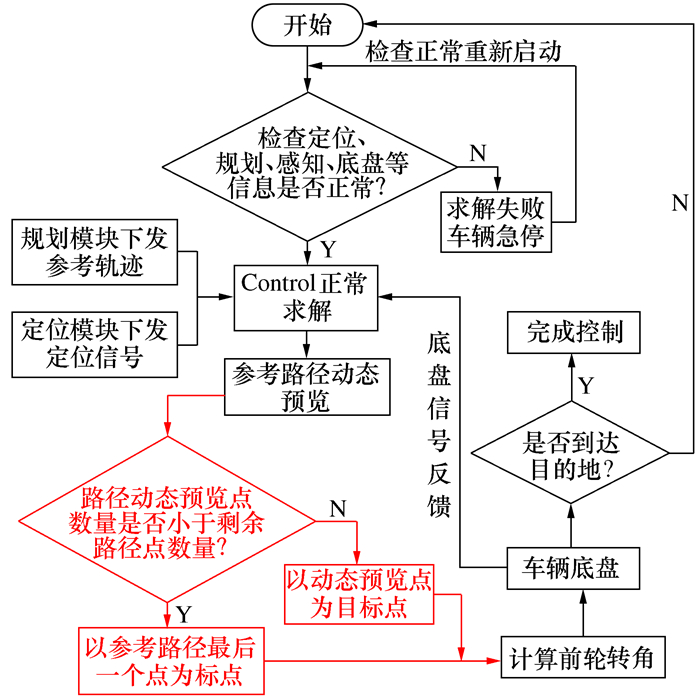
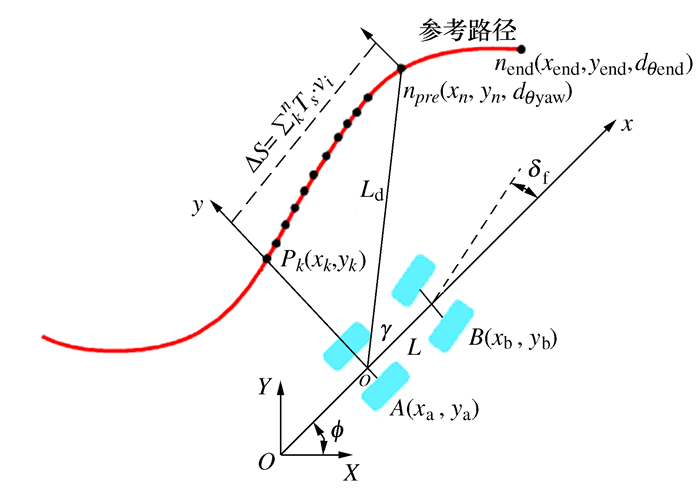
图 3 基于路径动态预览模型的侧向跟踪算法
Figure 3. Lateral tracking algorithm based on the dynamic preview path model
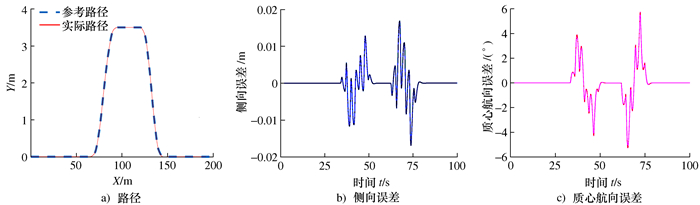
图 5 测试场景一行车时的路径跟踪控制效果(7 km/h)
Figure 5. Path tracking control performance in test scenario one while traveling (7 km/h)
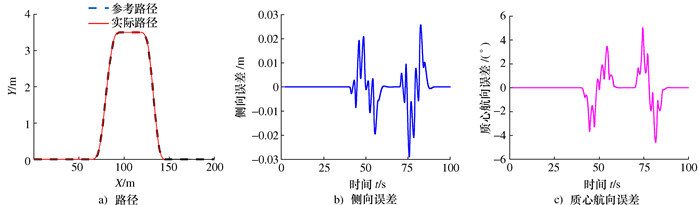
图 6 测试场景一倒车时的路径跟踪控制效果(7 km/h)
Figure 6. Path tracking control performance in test scenario one while reversing (7 km/h)
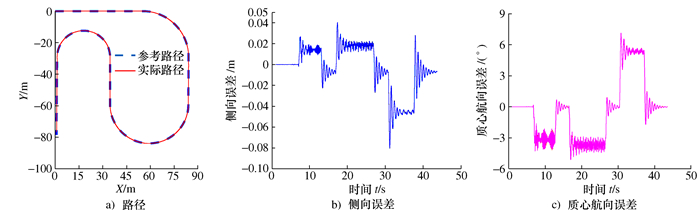
图 7 测试场景二-中低速工况跟踪控制效果(28 km/h)
Figure 7. Path tracking control performance for low-speed conditions in test scenario two (28 km/h)
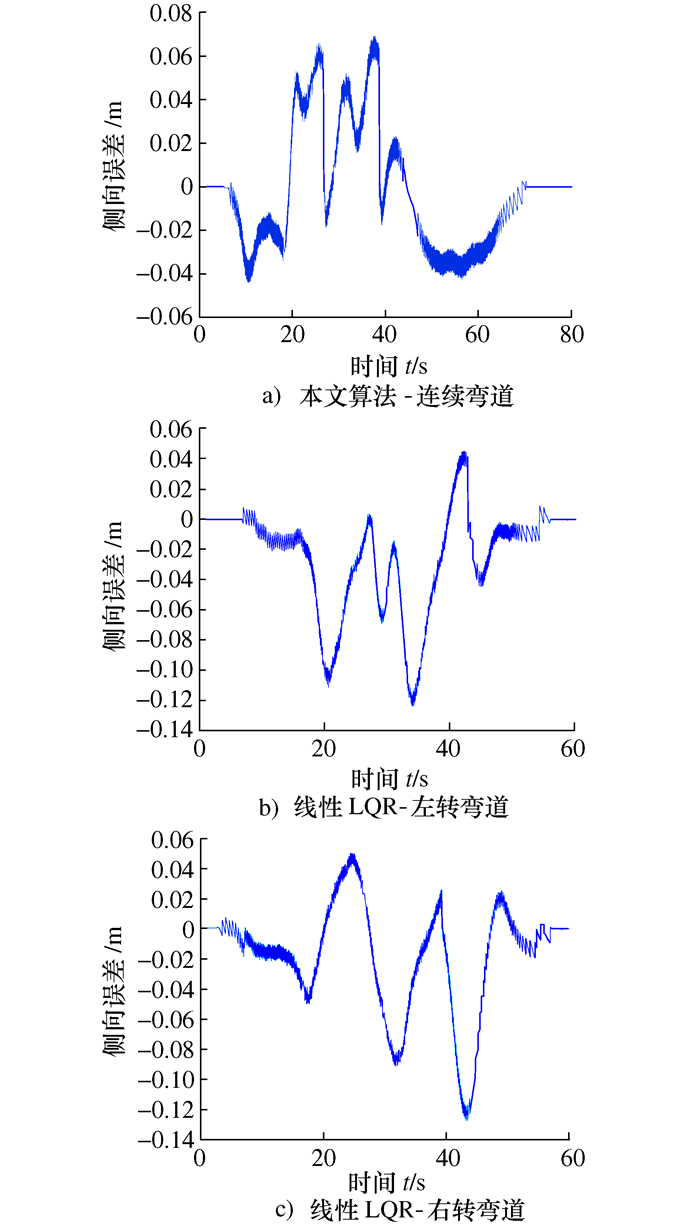
图 10 本文算法与线性LQR算法侧向跟踪误差效果比对
Figure 10. Comparison of the effect of lateral tracking error between proposed algorithm and linear LQR algorithm
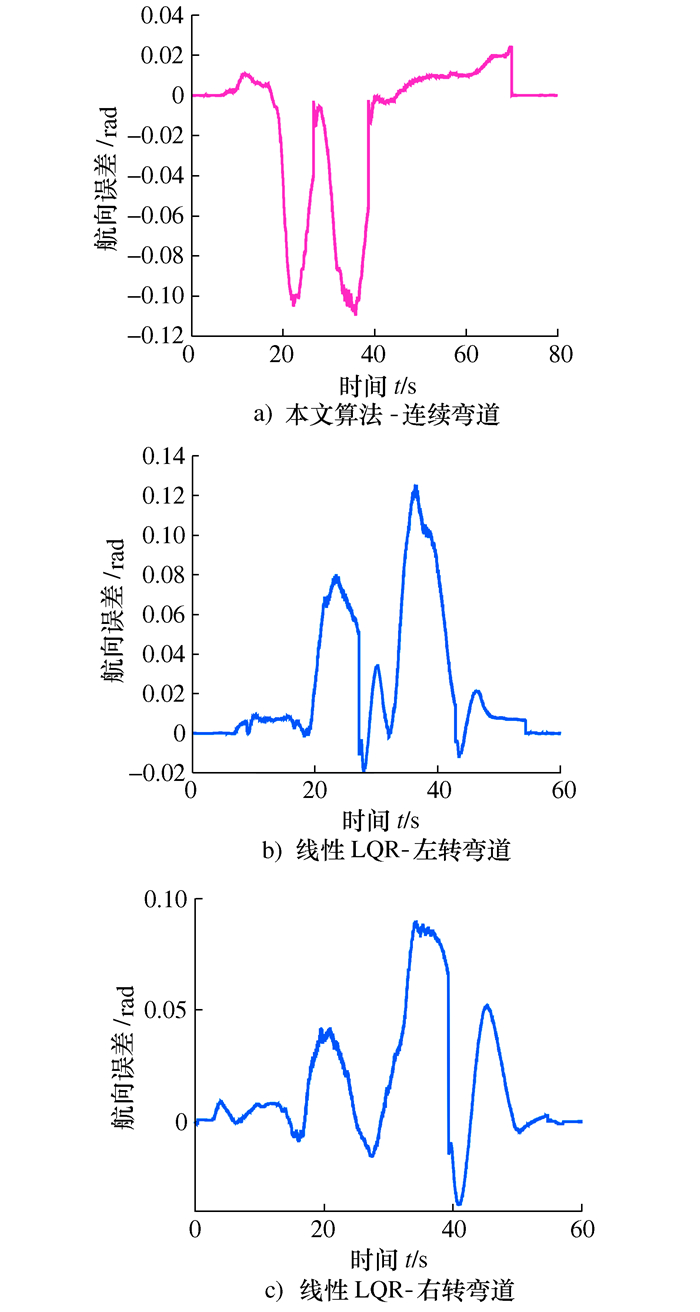
图 11 本文算法与线性LQR算法航向跟踪误差效果比对
Figure 11. Comparison of the effect of yaw tracking error between proposed algorithm and linear LQR algorithm
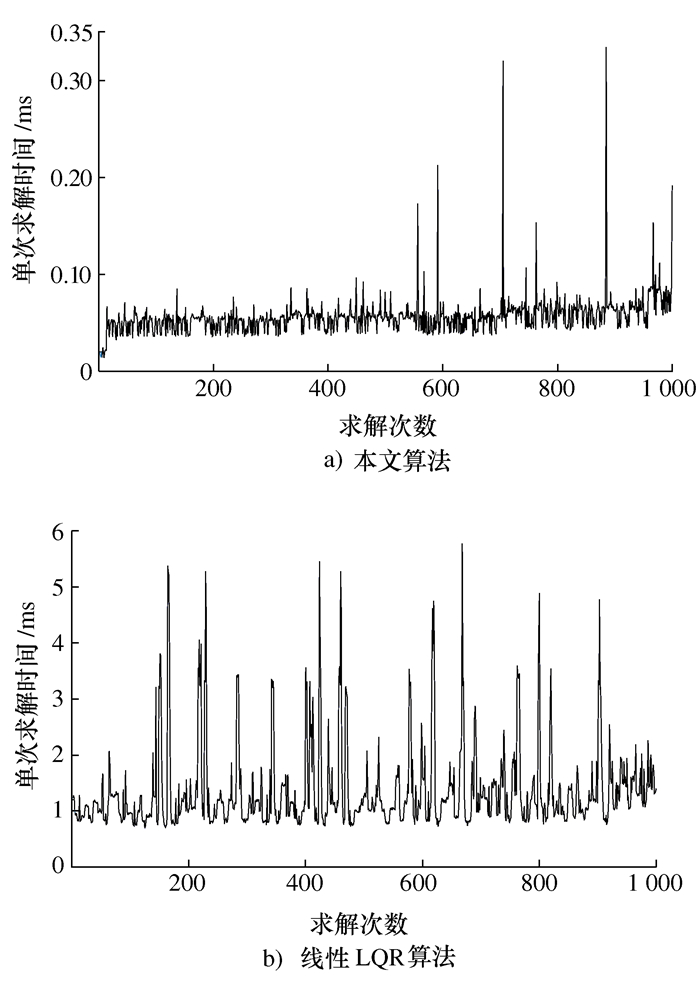
图 12 本文算法与线性LQR算法计算时间对比
Figure 12. Comparison of computation time between proposed algorithm and linear LQR algorithm
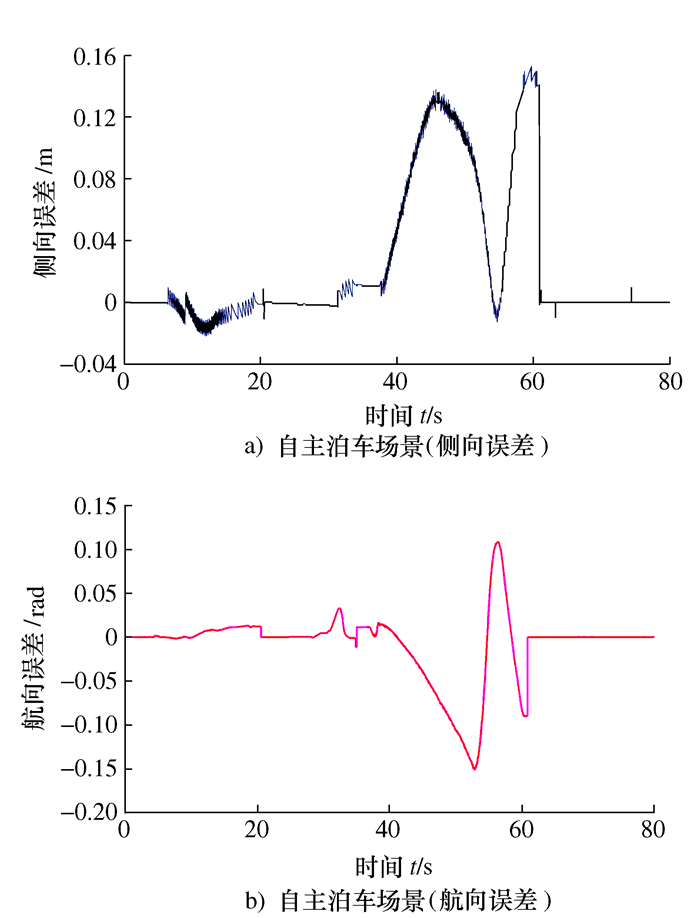
图 13 本文算法在自主泊车场景的应用
Figure 13. Application of proposed algorithm to autonomous parking scenarios
表 1 实车测试车辆参数
Table 1. Tested vehicle parameters
参数 数值 智能汽车质量/kg 1 830 质心到前轴的距离/m 1.276 质心到后轴的距离/m 1.589 转动惯量/(kg·m2) 3 710.41 前轮侧偏刚度/(N·rad-1) -150 000 后轮侧偏刚度/(N·rad-1) -150 000 转向系角传动比isw 15.9  下载: 导出CSV
下载: 导出CSV
-
[1] PADEN B, ĈÁP M, YONG S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55. doi: 10.1109/TIV.2016.2578706 [2] YAO Q Q, TIAN Y, WANG Q, et al. Control strategies on path tracking for autonomous vehicle: state of the art and future challenges[J]. IEEE Access, 2020, 8: 161211-161222. doi: 10.1109/ACCESS.2020.3020075 [3] 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143.XIONG L, YANG X, ZHUO G R, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. (in Chinese) [4] 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6): 1203-1214.CHEN H Y, CHEN S P, GONG J W. A review on the research of lateral control for intelligent vehicles[J]. Acta Armamentarii, 2017, 38(6): 1203-1214. (in Chinese) [5] ANDO T, KUGIMIYA W, HASHIMOTO T, et al. Lateral control in precision docking using RTK-GNSS/INS and LiDAR for localization[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(1): 78-87. doi: 10.1109/TIV.2020.2992857 [6] XU S B, PENG H E. Design, analysis, and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 48-58. doi: 10.1109/TITS.2019.2892926 [7] YU L Y, ZHENG S, DAI Y Q, et al. A feedback- feedforward steering controller designed for vehicle lane keeping in hard-braking manoeuvres on split-μ roads[J]. Vehicle System Dynamics, 2022, 60(5): 1763-1787. doi: 10.1080/00423114.2020.1869274 [8] 陈亮, 秦兆博, 孔伟伟, 等. 基于最优前轮侧偏力的智能汽车LQR横向控制[J]. 清华大学学报(自然科学版), 2021, 61(9): 906-912.CHEN L, QIN Z B, KONG W W, et al. Lateral control using LQR for intelligent vehicles based on the optimal front-tire lateral force[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(9): 906-912. (in Chinese) [9] MORALES J, MARTÍNEZ J L, MARTÍNEZ M A, et al. Pure-pursuit reactive path tracking for nonholonomic mobile robots with a 2D laser scanner[J]. EURASIP Journal on Advances in Signal Processing, 2009, 2009: 935237. doi: 10.1155/2009/935237 [10] ANDERSEN H, CHONG Z J, ENG Y H, et al. Geometric path tracking algorithm for autonomous driving in pedestrian environment[C]//2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM). Banff: IEEE, 2016: 1669-1674. [11] SHAN Y X, YANG W, CHEN C, et al. CF-pursuit: a pursuit method with a clothoid fitting and a fuzzy controller for autonomous vehicles[J]. International Journal of Advanced Robotic Systems, 2015, 12(9): 134. doi: 10.5772/61391 [12] 李爽, 徐延海, 陈静, 等. 基于弧长预瞄的车辆侧向跟踪控制研究[J]. 汽车工程, 2019, 41(6): 668-675.LI S, XU Y H, CHEN J, et al. A study on vehicle lateral tracking control based on arc-length preview[J]. Automotive Engineering, 2019, 41(6): 668-675. (in Chinese) [13] COULTER R C. Implementation of the pure pursuit path tracking algorithm[R]. Pittsburgh: Carnegie Mellon University, 1992. [14] 沈凯, 刘庭欣, 左思琪, 等. 复杂城市环境下GNSS/INS组合导航可观测度分析及鲁棒滤波方法[J]. 仪器仪表学报, 2020, 41(9): 252-261.SHEN K, LIU T X, ZUO S Q, et al. Observability analysis and robust fusion algorithms of GNSS/INS integrated navigation in complex urban environment[J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 252-261. (in Chinese) [15] 张栩源, 李军. 基于LQR双PID的智能电动汽车轨迹跟踪横纵向协同控制[J]. 汽车安全与节能学报, 2021, 12(3): 346-354.ZHANG X Y, LI J. Lateral and longitudinal coordinated control for intelligent-electric-vehicle trajectory-tracking based on LQR-dual PID[J]. Journal of Automotive Safety and Energy, 2021, 12(3): 346-354. (in Chinese) [16] FAN L, LIU P, TENG H, et al. Design of LQR tracking controller combined with orthogonal collocation state planning for process optimal control[J]. IEEE Access, 2020, 8: 223905-223917. doi: 10.1109/ACCESS.2020.3043498 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 127
- HTML全文浏览量: 66
- PDF下载量: 17
- 被引次数: 0
