




Variable Mode Power Release Branch Chain of Vehicle Side Door Latch Constructed with Over-constrained Spatial Mechanism
-
摘要: 面向汽车侧门锁轻量化及空间有效利用的需求,基于方位特征集提出一种空间过约束机构构型方案,对其拓扑结构及尺度约束类型进行机构解耦特征综合,构造两簇互相垂直的旋转副(
$\{R_A\|R_B\| R_F \perp R_E\|R_C\| R_D\} $ );对空间解耦过约束机构尺度特征进行优化,综合出可用于车门锁电动开启的空间RRURR解耦少杆过约束机构;在此基础上增设由滑槽与扭簧组合的柔顺副,构建具有柔顺性的单回路变模式空间RRUPRR机构。其不同驱动模式、限位边界可实现多种运动模式及其模式切换,包括空间6R过约束机构运动、空间5R1P机构运动和平面3R1P四杆机构运动模式。将柔顺单回路变模式机构嵌入车门锁电动开启支链,实现了电动开启、手动开启等功能;动力学仿真得到手动开启工况中齿轮曲柄仅发生0.042°的微小转动角度,验证了电动开启支链与手动开启支链的运动兼容。Abstract: To meet the requirements of a lightweight vehicle side door latch and its effective space utilization, the configuration scheme of its over-constrainedspatial mechanism is proposed based on its position and orientation characteristics. The mechanismsfor decoupling feature synthesis are carried out for its topology and dimensional constraint types, and two clusters of mutually perpendicular rotational pairs are constructed ($\{R_A\|R_B\| R_F \perp R_E\|R_C\| R_D\} $ ). The dimensional characteristics of the decoupled over-constrainedspatial mechanisms are optimized, and the RRURR decoupled over-constrainedspatial mechanism which can be used for power release of the vehicle door latch is synthesized. The compliant pair composed of a groove and a compliant torsion spring is added to construct a compliant single-loop and variable-mode RRUPRR spatialmechanism. Its different driving modes and limited boundaries can realize a variety of motion modes andswitch modes, including the 6R over-constrainedspatial mechanism motion mode, the 5R1P spatialmechanism motionmode and the planar 3R1P four-barspatial mechanism motion mode. The flexible single-loop and variable-mode spatialmechanism is embedded into the power release branch of the vehicle door latch to realize the functions of power release and manual release. The dynamic simulation results show that the gear crank has only a small rotational angle of 0.042° in the manual release condition, thus verifying the motion compatibility between the power release branch and the manual release branch. -
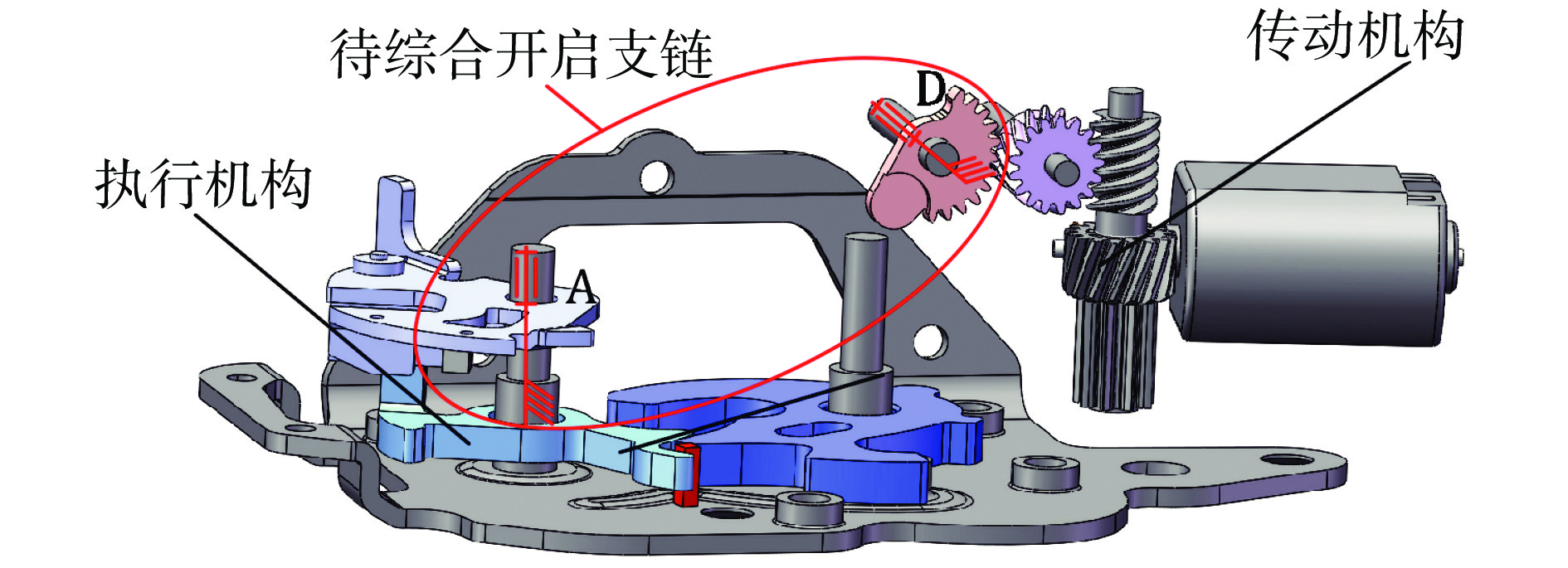
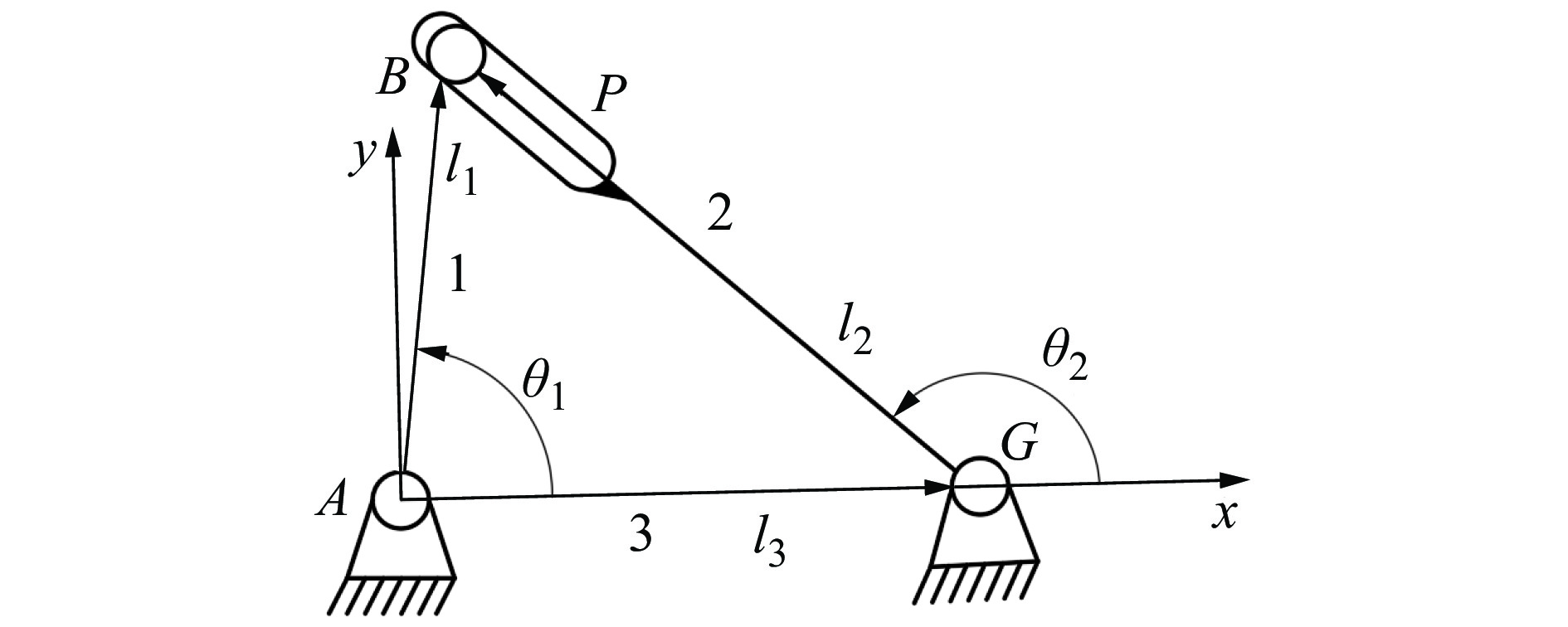
图 1 汽车侧门锁传动机构及有待综合的电动开启支链
Figure 1. Side door lock transmission mechanism in automobiles and the electric opening support branched chain to be integrated
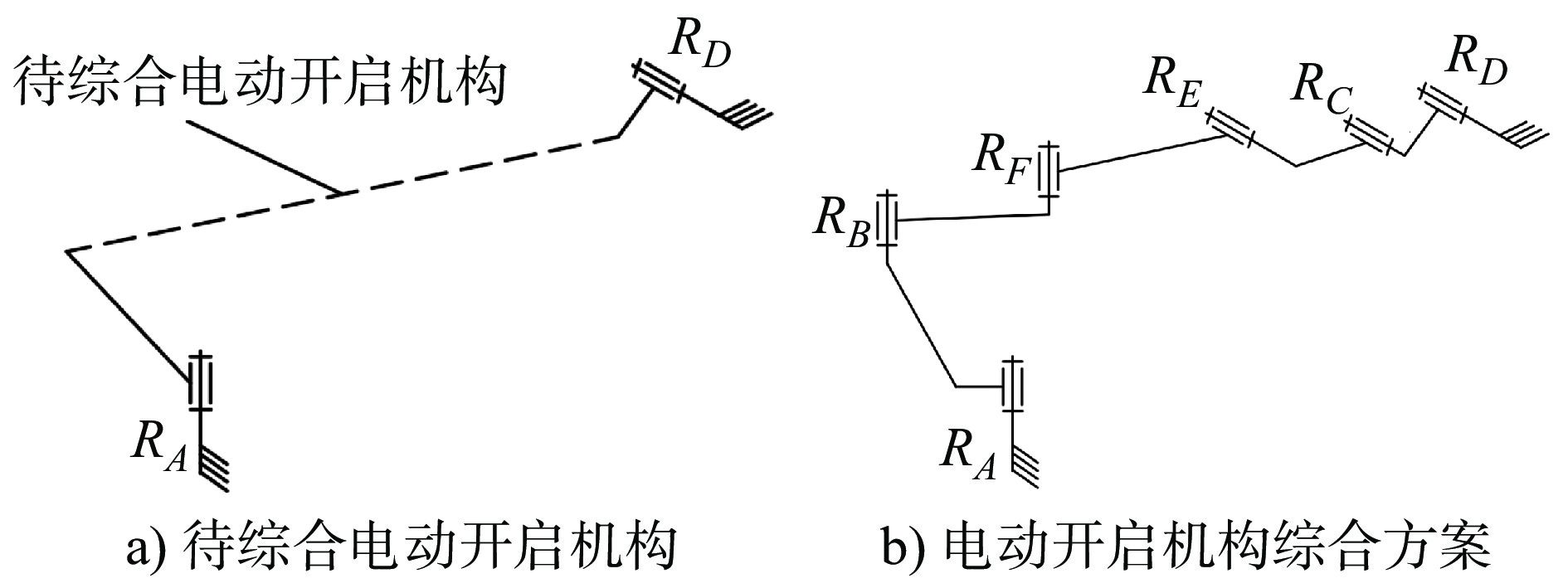
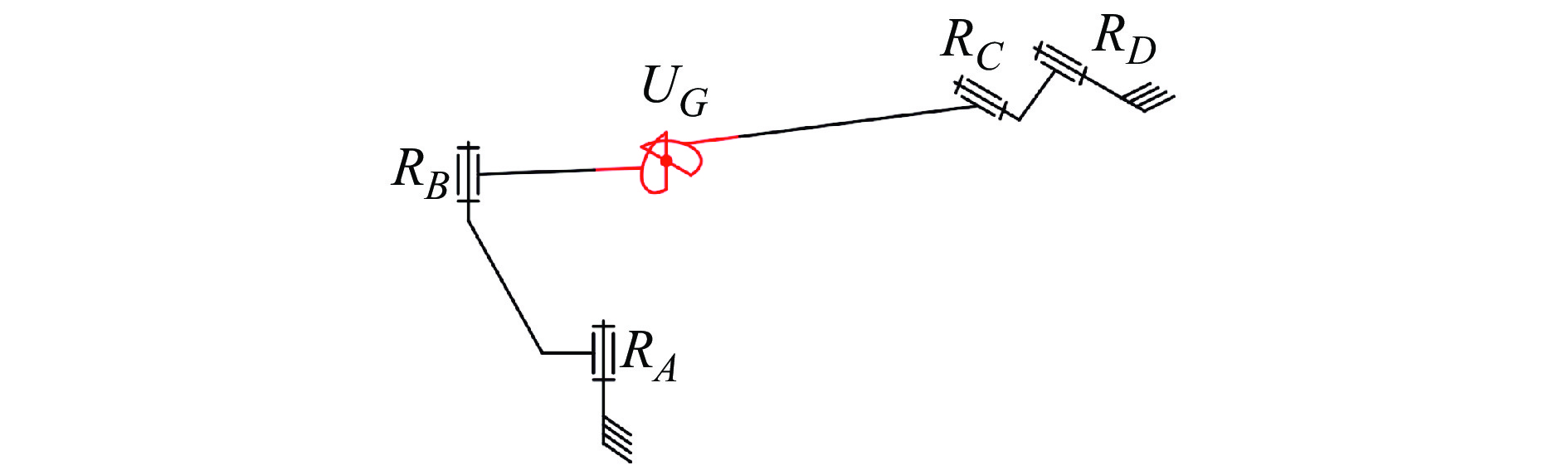
图 2 待综合电动开启机构 和电动开启机构综合方案
Figure 2. To be integrated electric opening mechanism and electric opening mechanism comprehensive scheme
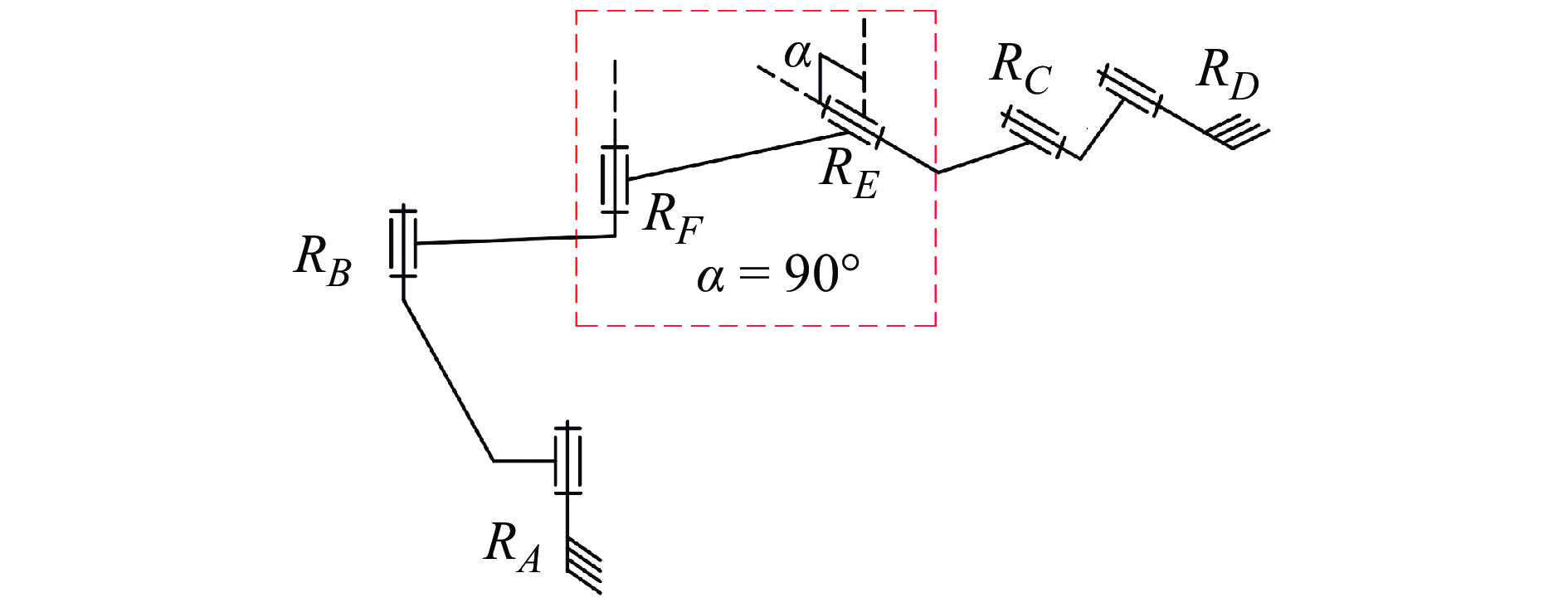
图 3 开启机构尺度约束类型优化
Figure 3. Optimization of size-constrained types for the opening mechanism
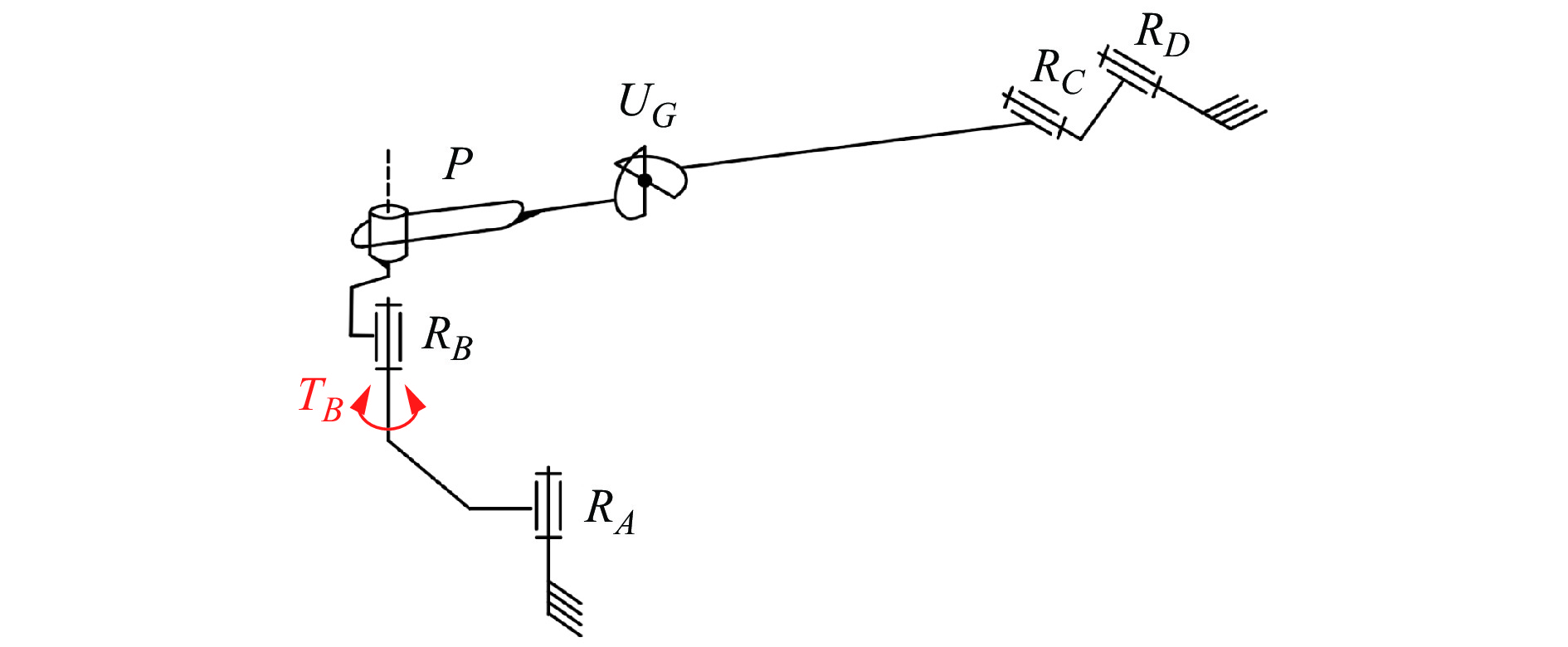
图 5 具有柔顺特性的空间RRUPRR机构
Figure 5. Spatial RRUPRR mechanism with compliant characteristics
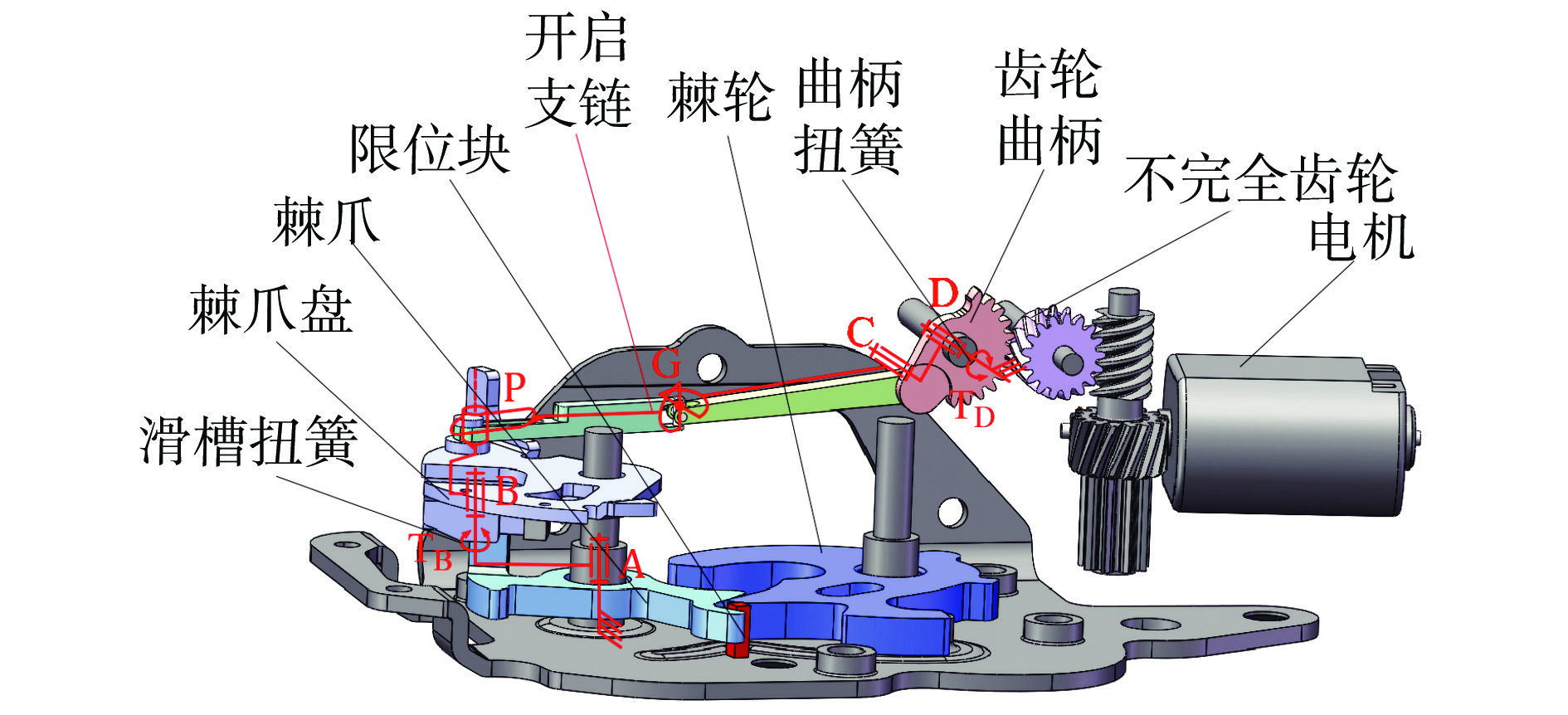
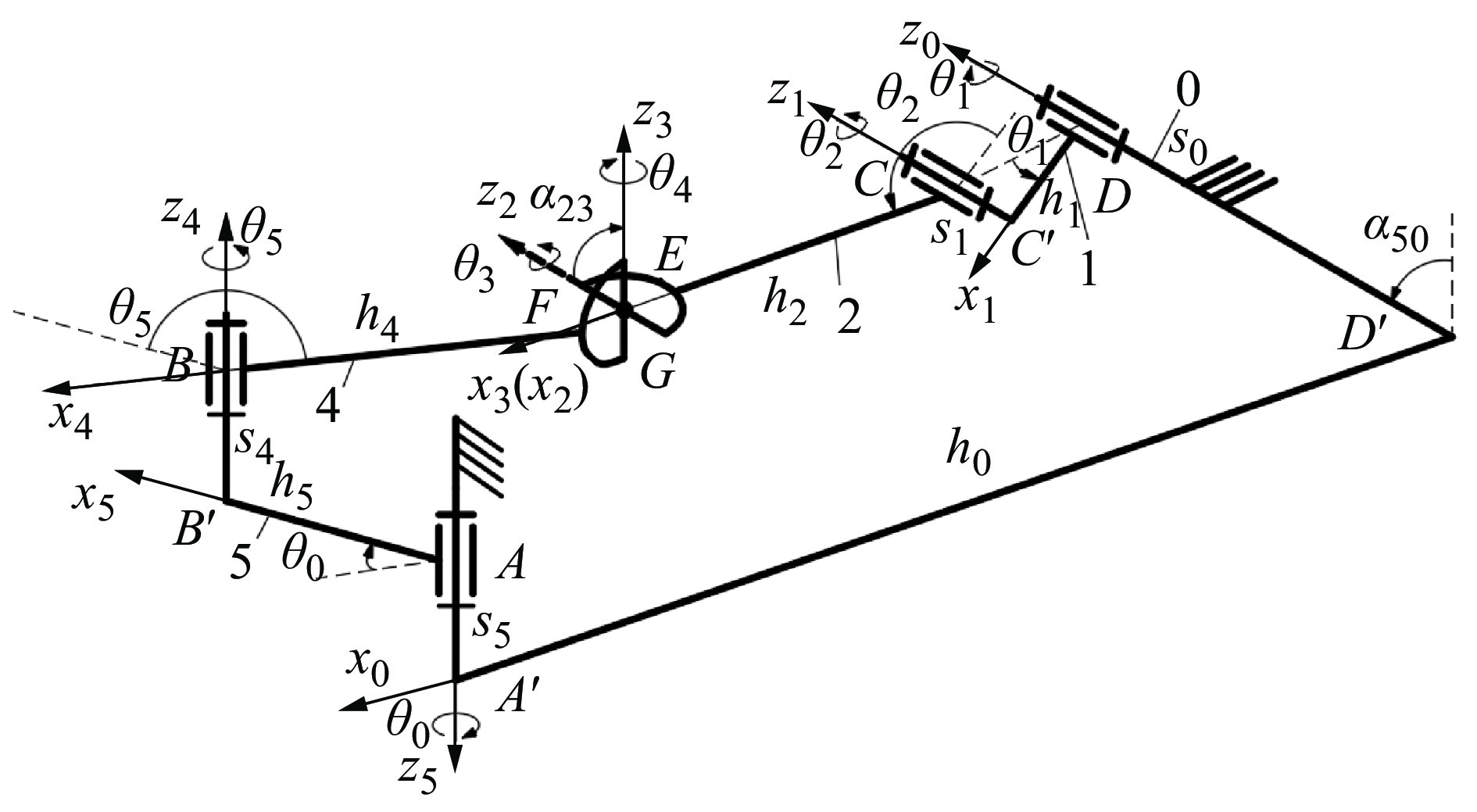
图 6 汽车侧门锁机构结构示意图
Figure 6. Schematic diagram of the automobile side door lock mechanism
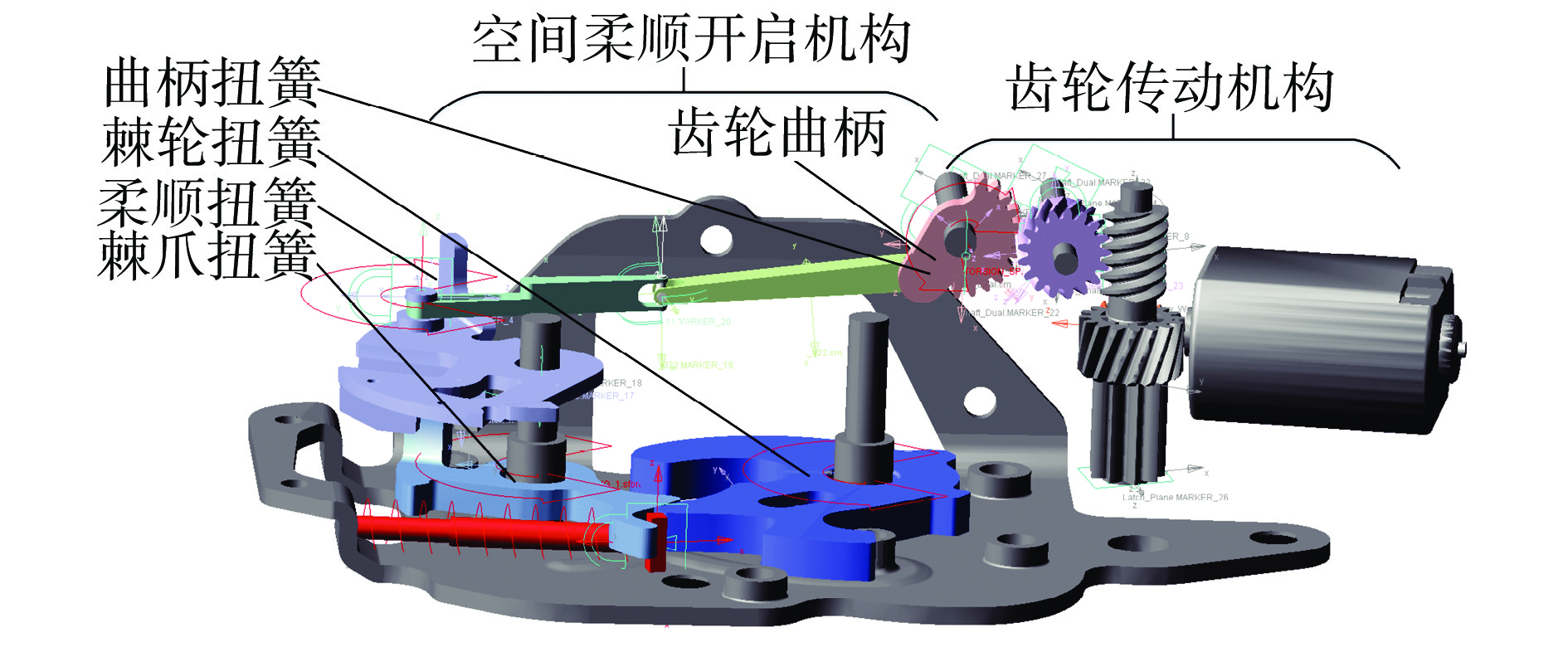
图 9 基于Adams构建的车门锁机构仿真模型
Figure 9. Simulation model of the door lock mechanism based on Adams
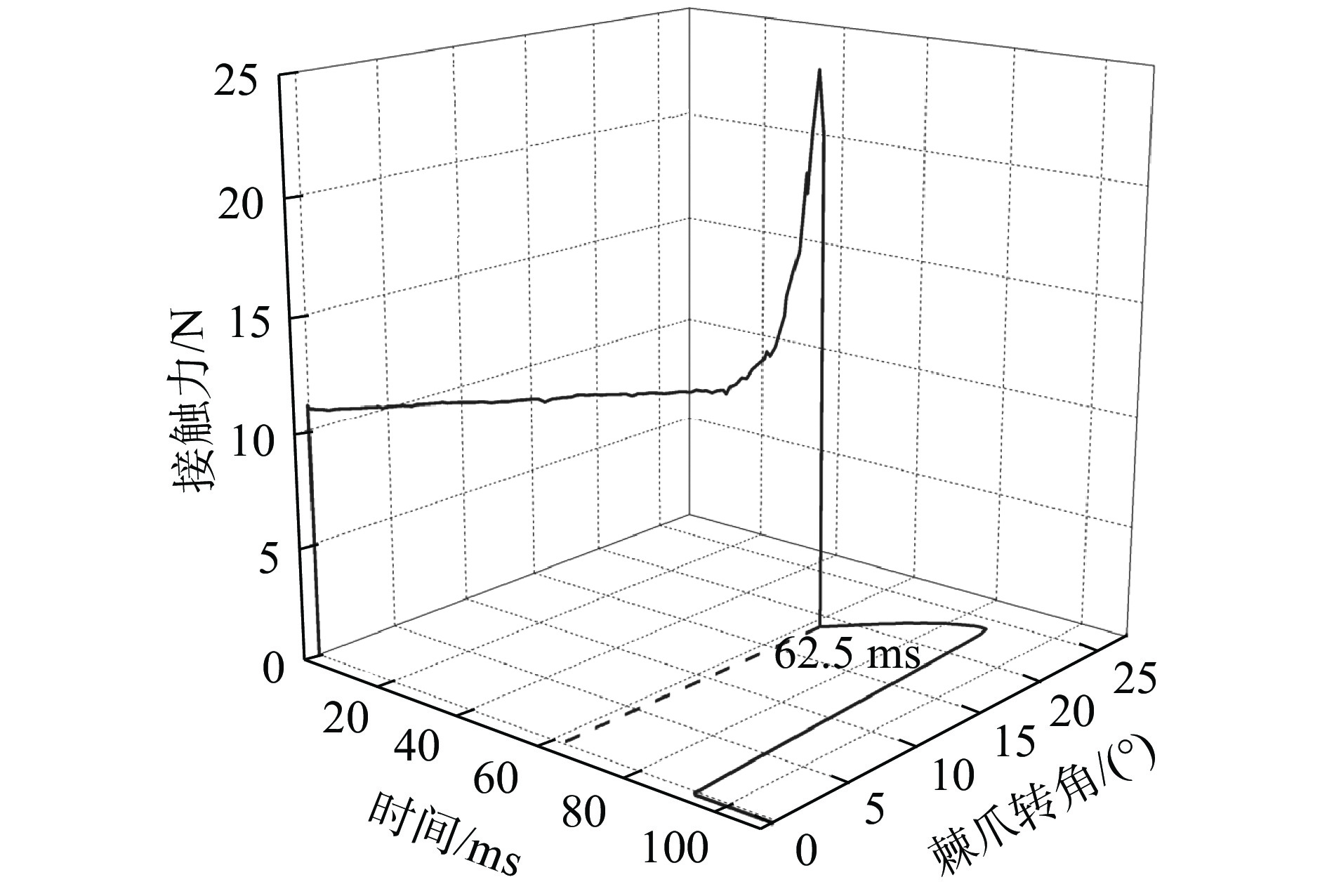
图 11 电动开启过程棘轮棘爪接触力曲线
Figure 11. The contact force curve of the ratchet and pawl during the electric opening process
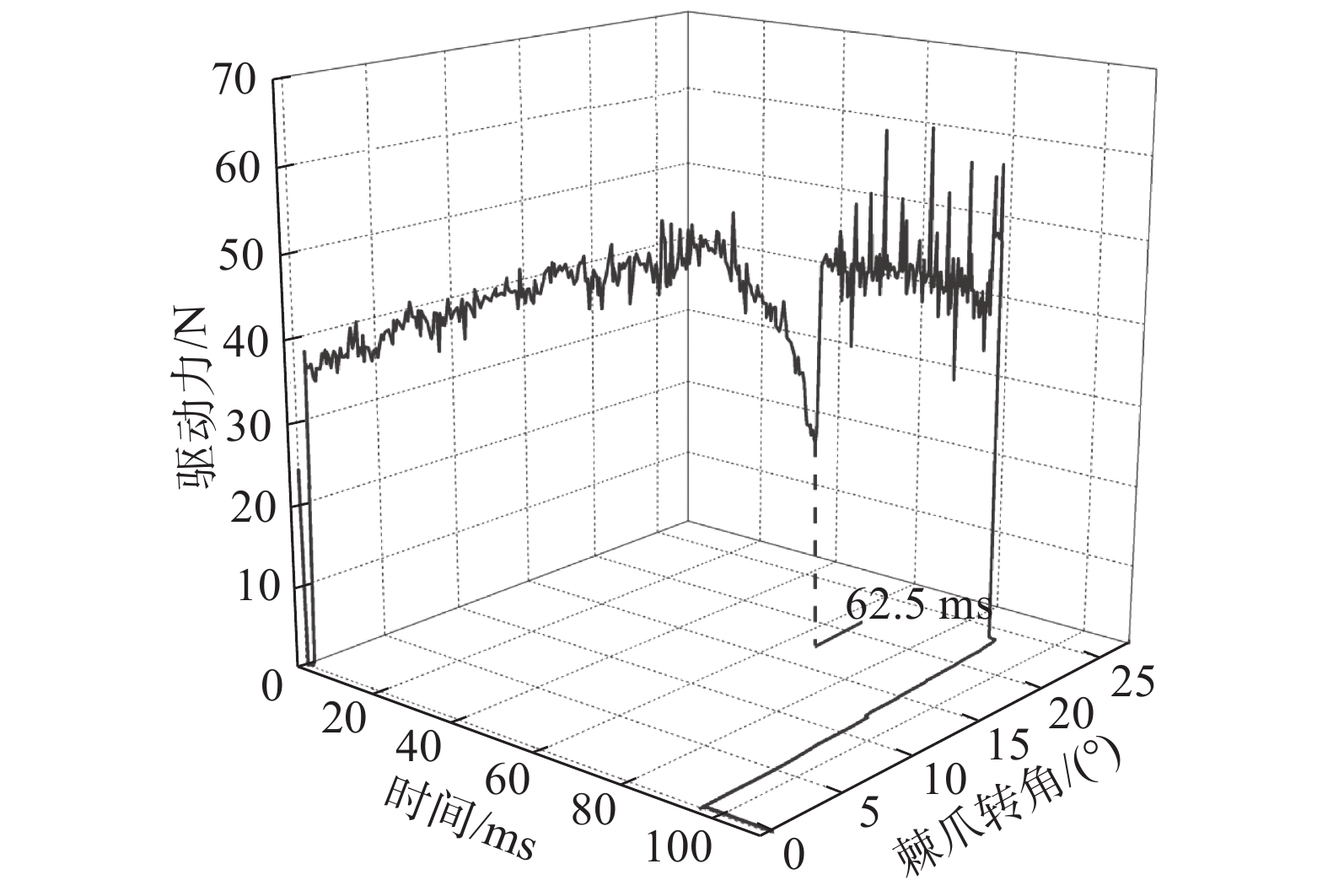
图 12 电动开启过程中齿轮曲柄驱动力变化曲线
Figure 12. Variation in the driving force of the gear crank during the electric opening process
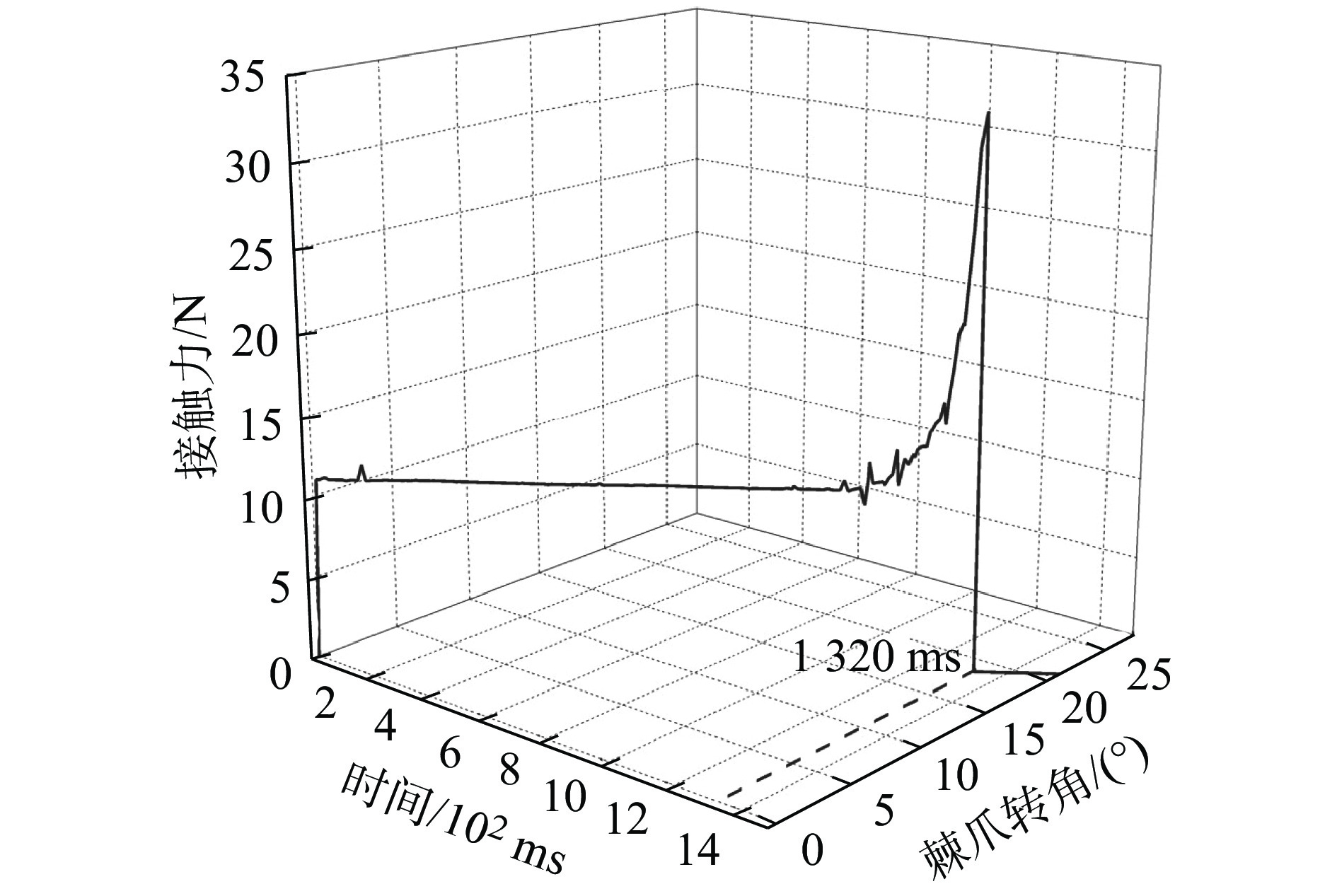
图 13 手动开启过程棘轮棘爪接触力曲线
Figure 13. The contact force curve of the ratchet and pawl during the manual opening process
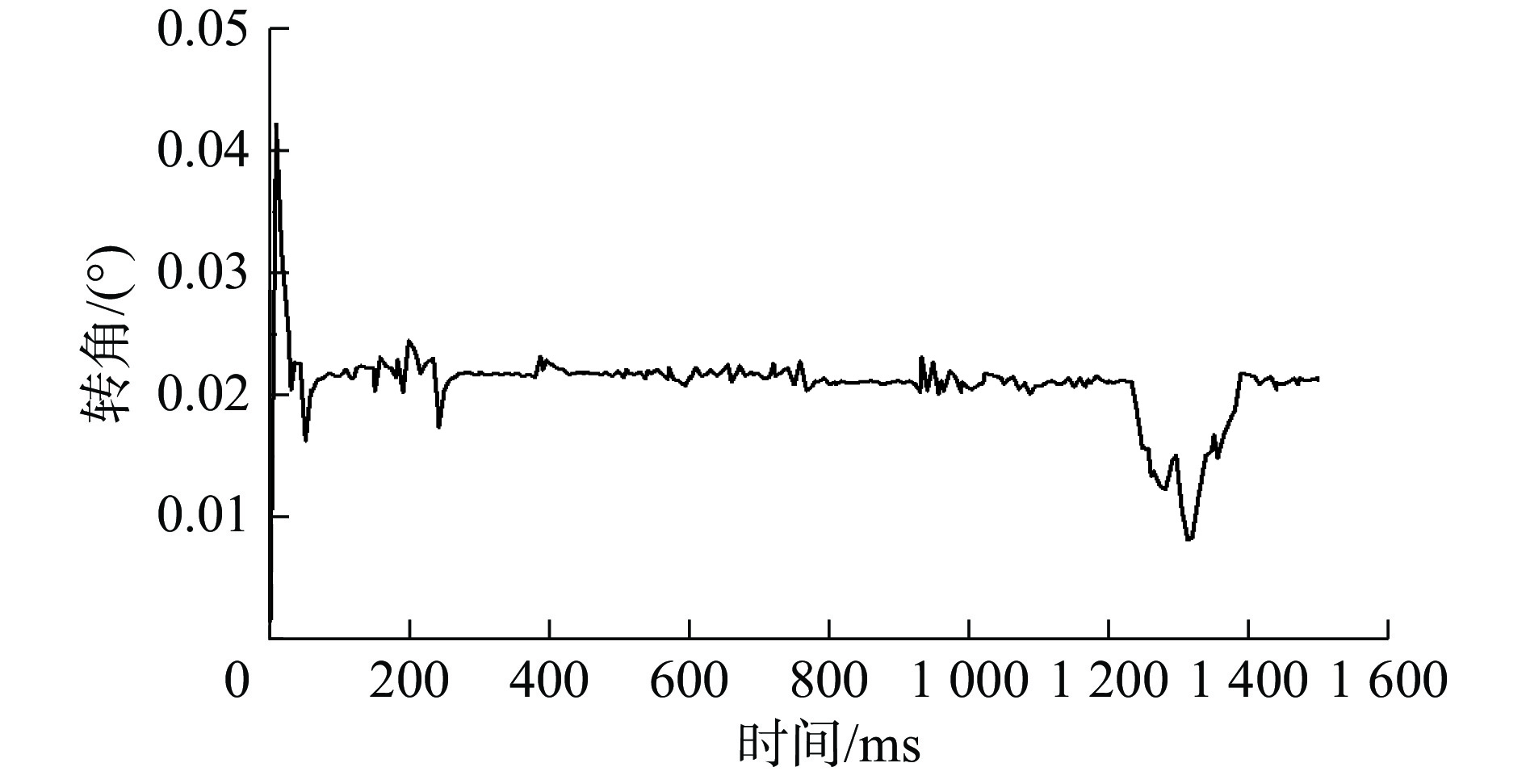
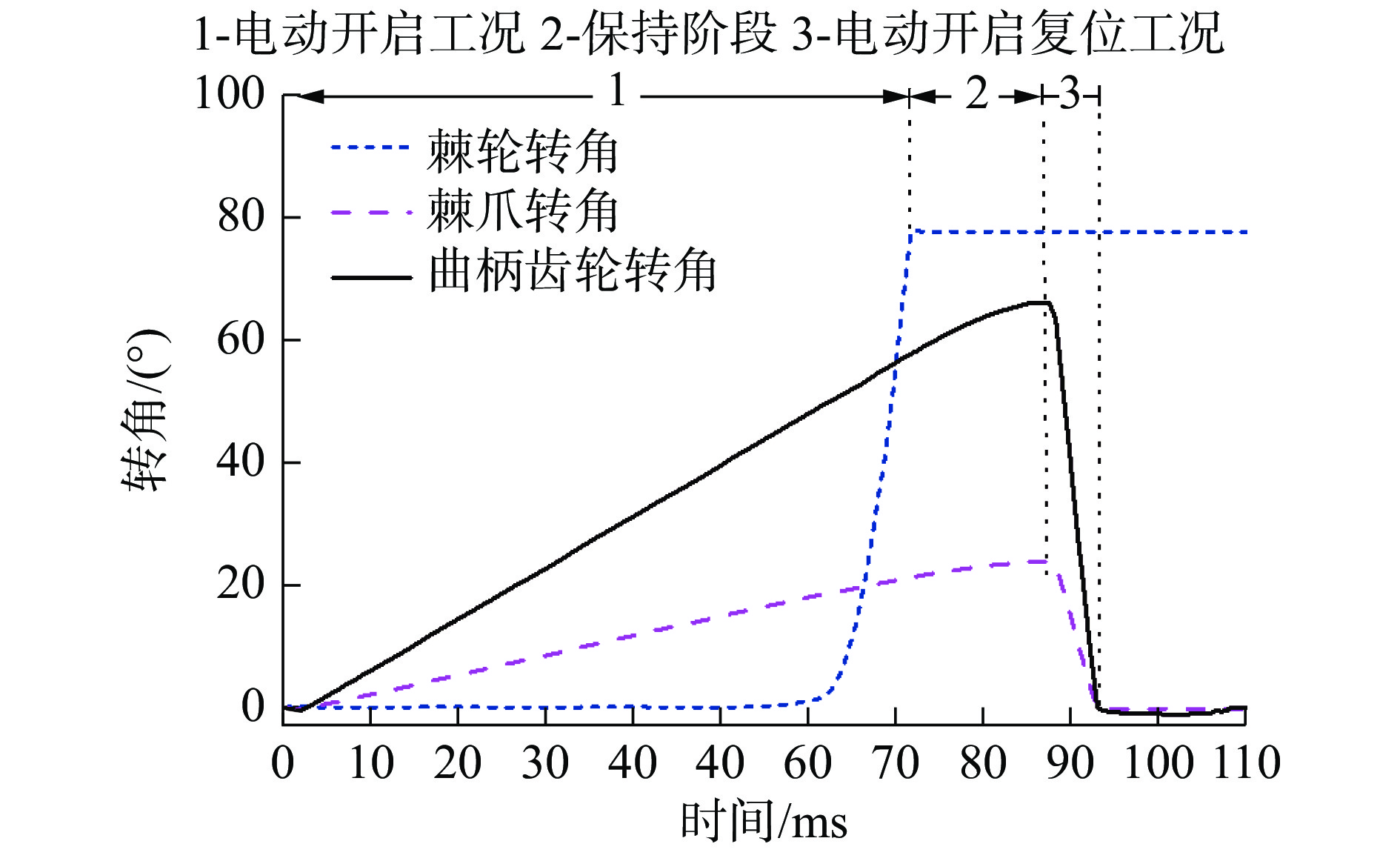
图 14 手动开启过程中齿轮曲柄转角变化
Figure 14. Variation in crank angle during the manual opening process
表 1 各工况车门锁操作机构运动过程及其对应的空间柔顺七杆机构运动示意图
Table 1. Motion processeses of the operating mechanisms for various working conditions of the door lock and corresponding motion diagrams of the spatial compliant seven-bar mechanisms
工况 车门锁操作机构运动示意图 空间柔顺七杆机构运动示意图 功能实现及运动过程 电
动
开
启

曲柄CD逆时针转动,带动棘爪盘AB使棘爪脱离限位块;一定角度后,棘爪释放棘轮,门锁开启;该过程转动副B始终处于滑槽极限位置,不会产生相对滑动。 P副刚化,空间RRUPRR机构转化为空间RRURR机构。 1自由度空间过约束机构运动模式
$\rm DOF=6-5=1 $
等效机构为:RRURR过约束机构电
动
开
启
复
位

曲柄CD与棘爪顺时针旋转复位,由于惯性力作用,齿轮曲柄CD回到原始位置后会继续反转一段距离,此时棘爪和棘爪盘由于扭簧力的作用保持静止。 复位扭簧TD为驱动,空间RRUPRR机构转化为空间RRUPR机构。 1自由度空间机构运动模式
$ \rm DOF=6-5=1 $
等效机构为:空间5R1P机构手
动
开
启

棘爪盘AB顺时针转动,转动副B脱离滑槽左端极限位置,与滑槽之间产生相对滑动,同时棘爪顺时针转动,一定角度后棘爪释放棘轮,门锁开启。 转动副D刚化,空间RRUPRR机构转化为平面3R1P机构。 1自由度平面机构运动模式
$\rm DOF=6-5=1 $
等效机构为:平面3R1P机构注:图中黑色虚线为运动初始位置,黑色实线为运动过程某一瞬时位置。  下载: 导出CSV
下载: 导出CSV
表 2 扭簧刚度系数及预载荷参数
Table 2. The stiffness coefficient and pre-load parameters of the torsion spring
参数 刚度系数/(Nmm·(°)−1) 预载荷/N 棘爪扭簧$ {T_1} $ 2.2119 265 棘轮扭簧$ {T_2} $ 0.4927 −340 曲柄扭簧$ {T_D} $ 2.2119 0 柔顺扭簧$ {T_B} $ 0.4927 0
下载: 导出CSV
表 3 齿轮传动机构参数
Table 3. Gear transmission mechanism cylinder parameters
参数 数值 齿轮曲柄节圆半径r 13.5 mm 齿轮传动机构传动比i 1∶120 电机最大转矩T 11 Nmm
下载: 导出CSV
-
[1] ATTARAN M. The impact of 5G on the evolution of intelligent automation and industry digitization[J]. Journal of Ambient Intelligence and Humanized Computing, 2021: 1-17. doi: 10.1007/s12652-020-02521-x [2] 王明远. 面向电动释放车门锁的变自由度柔顺机构综合与分析[D]. 上海: 上海工程技术大学, 2020: 3-4WANG M Y. Mechanism synthesis and analysis of variable dof compliant mechanism for vehicle side door latch with power release feature[D]. Shanghai: Shanghai University of Engineering Science, 2020: 3-4. (in Chinese) [3] 李春风. 汽车门锁机构及其控制系统的研制[D]. 南京: 南京航空航天大学, 2009LI C F. Research on the mechanism of automobile door locks and its control system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009. (in Chinese) [4] 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. doi: 10.3901/JME.2020.10.127XIONG L, YANG X, ZHUO G R, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. (in Chinese) doi: 10.3901/JME.2020.10.127 [5] MARGHERITTI E, CUMBO F. Electrical vehicle latch: US, 9353556[P]. 2014-06-26 [6] 王明远, 杭鲁滨, 刘哲, 等. 含变自由度力自适应复位组合柔顺副的汽车门锁机构[J]. 中国机械工程, 2020, 31(12): 1437-1443.WANG M Y, HANG L B, LIU Z, et al. Vehicle side door latch power release mechanism with variable DOF force-adaptive-recovery combined compliant pair[J]. China Mechanical Engineering, 2020, 31(12): 1437-1443. (in Chinese) [7] 王炎, 杭鲁滨, 刘哲, 等. 电动开启汽车门锁的传动机构连杆轨迹研究[J]. 机械传动, 2019, 43(5): 52-56.WANG Y, HANG L B, LIU Z, et al. Research on the connecting rod trajectory of transmission mechanism of electric car door lock[J]. Journal of Mechanical Transmission, 2019, 43(5): 52-56. (in Chinese) [8] 刘川禾, 杨廷力, 刘毅. 变拓扑机构理论的基本问题[J]. 机械工程学报, 2005, 41(8): 56-62. doi: 10.3321/j.issn:0577-6686.2005.08.009LIU C H, YANG T L, LIU Y. Basic problems of the theory for the variable topology mechanisms[J]. Journal of Mechanical Engineering, 2005, 41(8): 56-62. (in Chinese) doi: 10.3321/j.issn:0577-6686.2005.08.009 [9] ZLATANOV D, BONEV I A, GOSSELIN C M. Advances in robot kinematics theory and applications[M]. Kluwer Academic Publishers, 2002 [10] 单彦霞, 张建伟, 于靖军, 等. 多模式并联机构操作模式变换方法研究[J]. 农业机械学报, 2020, 51(6): 396-403.SHAN Y X, ZHANG J W, YU J J, et al. Operation mode transformation method of multi-mode parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(6): 396-403. (in Chinese) [11] 何妍颖, 李晔卓, 武建昫, 等. 多模式两轮移动机器人的设计与运动分析[J]. 机械工程学报, 2019, 55(23): 84-90.HE Y Y, LI Y Z, WU J X, et al. Design and mobility analysis of a multi-mode two-wheel mobile robot[J]. Journal of Mechanical Engineering, 2019, 55(23): 84-90. (in Chinese) [12] KONG X W, CLÉMENT M, RICHARD P L. Type synthesis of parallel mechanisms with multiple operation modes[J]. Journal of Mechanical Design, 2007, 129(6): 595-601. doi: 10.1115/1.2717228 [13] 戴建生, 丁希仑, 邹慧君. 变胞原理和变胞机构类型[J]. 机械工程学报, 2005, 41(6): 7-12. doi: 10.3901/JME.2005.06.007DAI J S, DING X L, ZOU H J. Fundamentals and categorization of metamorphic mechanisms[J]. Journal of Mechanical Engineering, 2005, 41(6): 7-12. (in Chinese) doi: 10.3901/JME.2005.06.007 [14] 于靖军, 刘凯, 孔宪文. 多模式机构研究进展[J]. 机械工程学报, 2020, 56(19): 14-27. doi: 10.3901/JME.2020.19.014YU J J, LIU K, KONG X W. State of the art of multi-mode mechanisms[J]. Journal of Mechanical Engineering, 2020, 56(19): 14-27. (in Chinese) doi: 10.3901/JME.2020.19.014 [15] 喻怀正, 陈辛波. 过约束空间机构的曲柄条件及等角速传动条件[J]. 同济大学学报, 1986(4): 110-119.YU H Z, CHEN X B. The crank existing conditions and the constant velocity transmission condition for the overconstrained spatial mechanisms[J]. Journal of Tongji University, 1986(4): 110-119. (in Chinese) [16] 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012YANG T L, LIU A X, LUO Y F, et al. Theory and application of robot mechanism topology[M]. Beijing: Science Press, 2012. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 241
- HTML全文浏览量: 187
- PDF下载量: 11
- 被引次数: 0
