




Dynamics Simulation and Analysis of Rotating Traction Parachute Ejection System
-
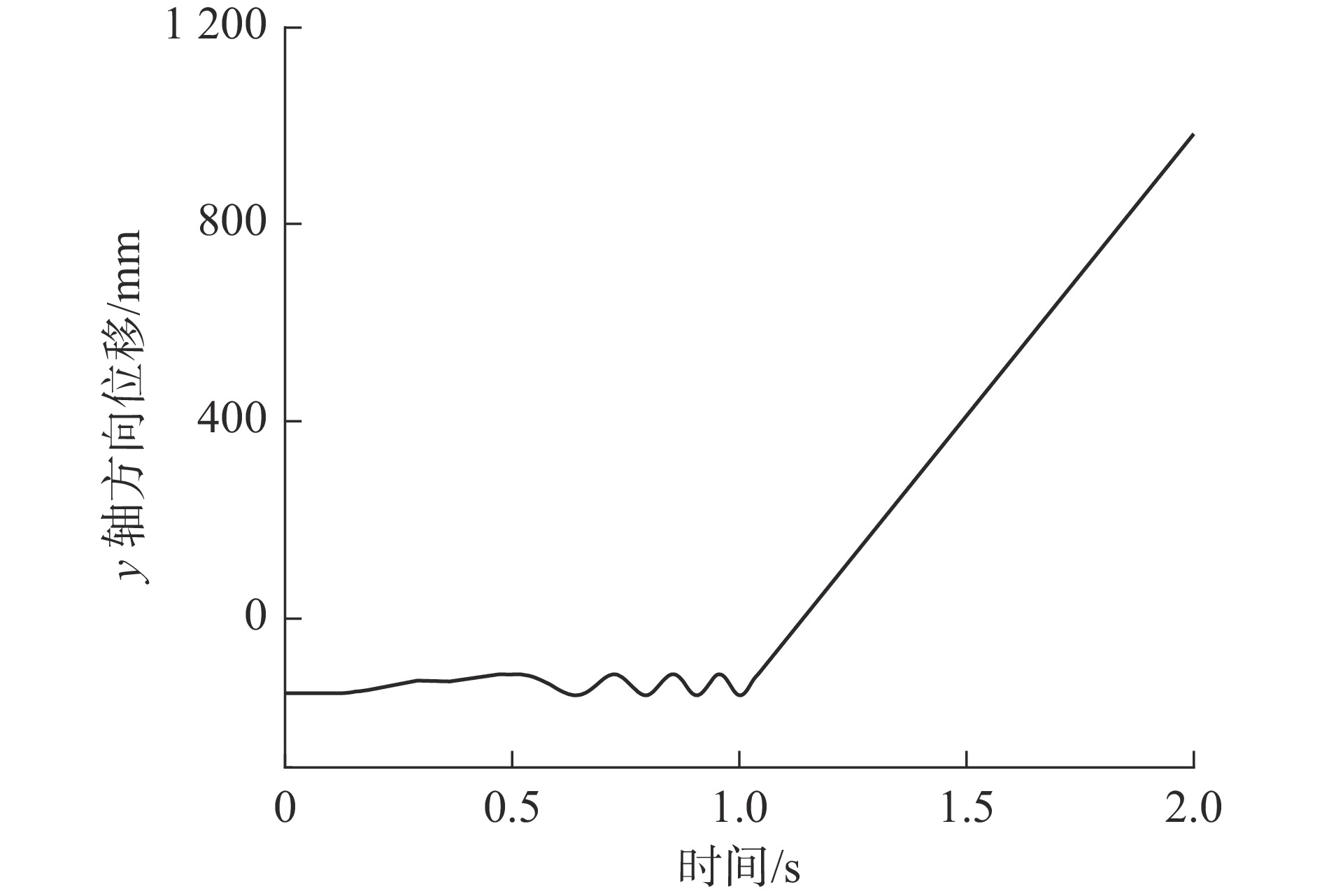
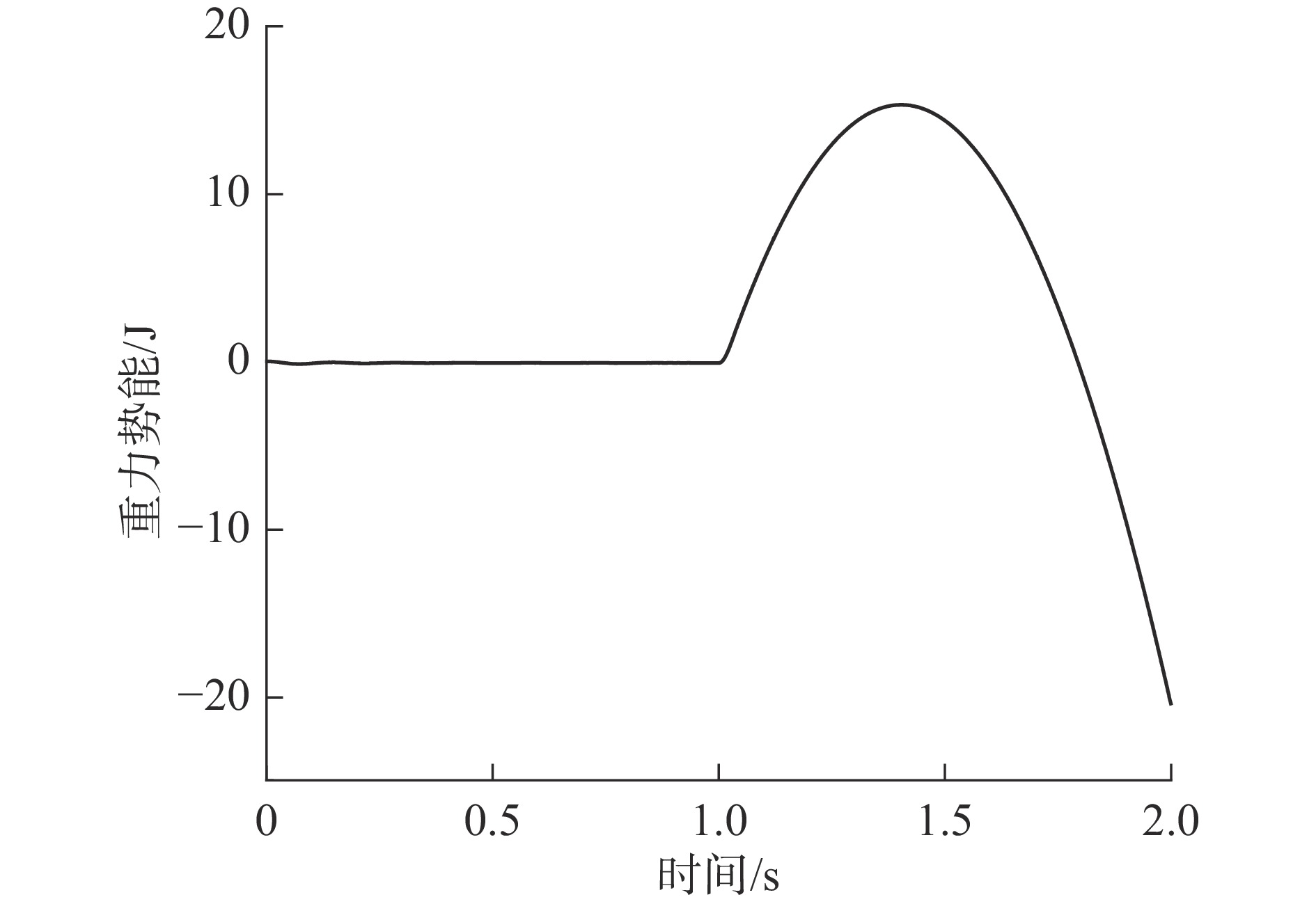
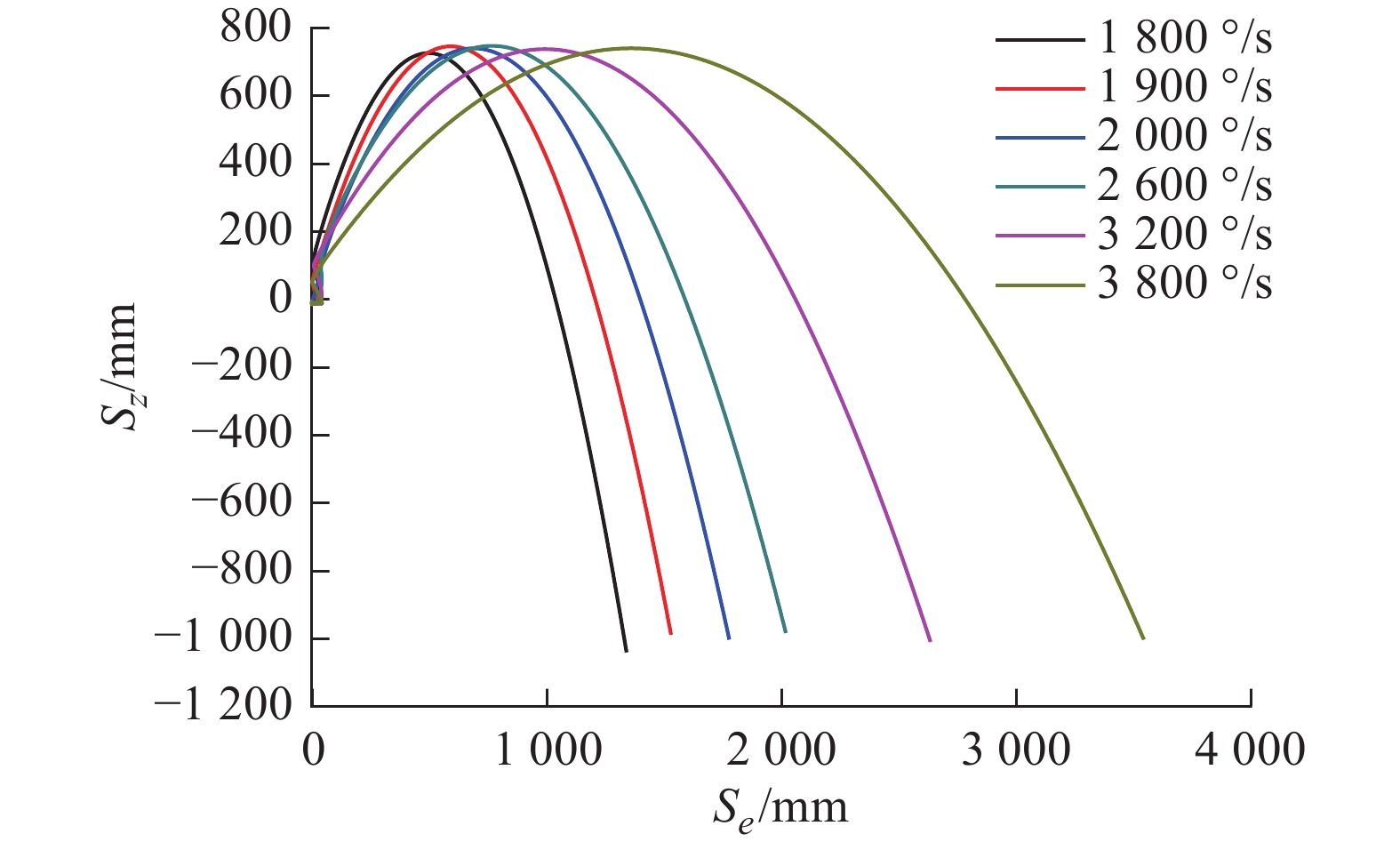
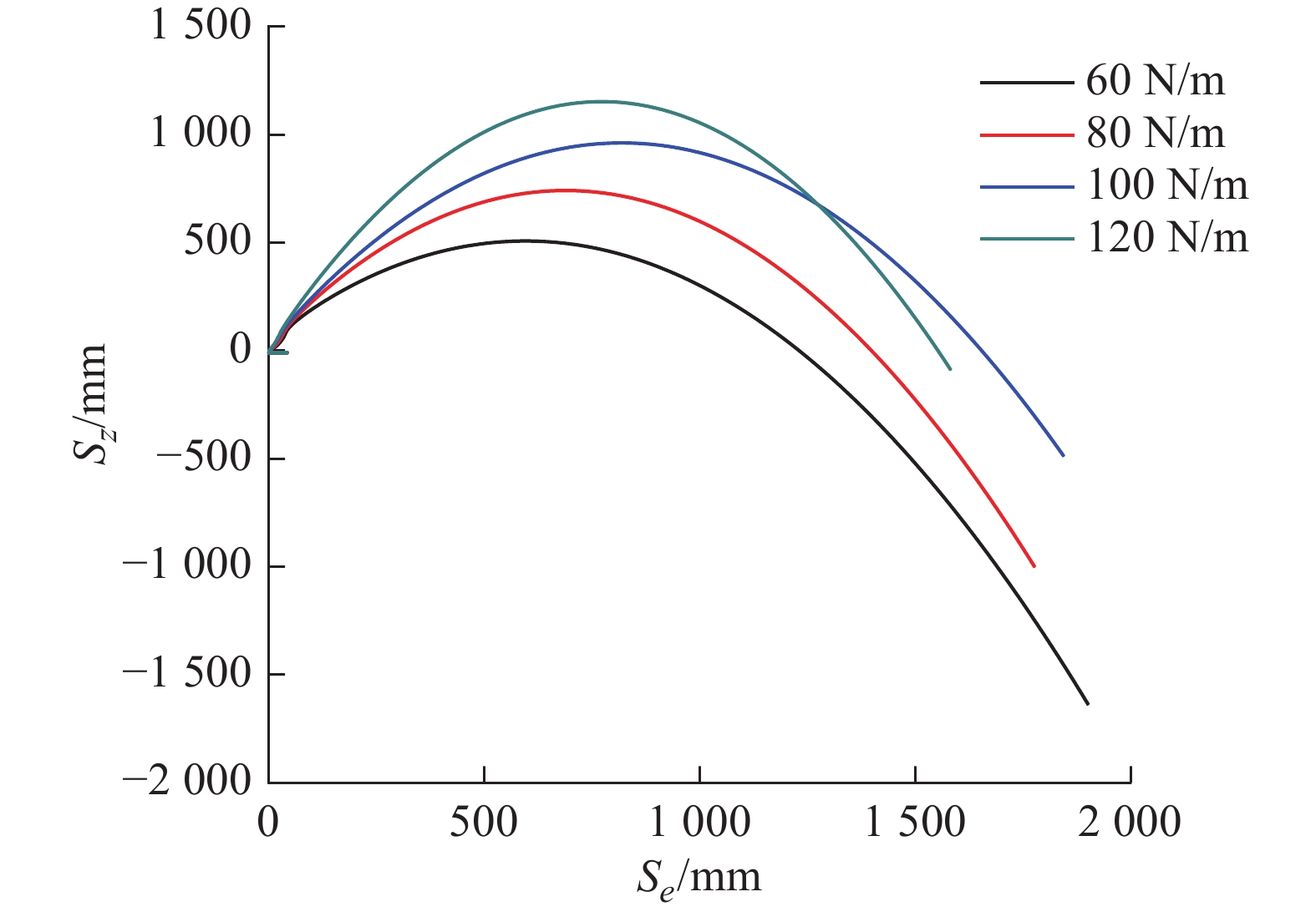
摘要: 为了缩短降落伞开伞时间,对无人机降落伞弹射系统进行了研究。通过高速旋转方式,采用牵引球将降落伞伞口牵引开,增大伞口初始面积,加速气流进入伞内。使用Solidworks进行三维建模后,导入Adams进行运动学仿真,对仿真结果进行分析。结果发现,牵引球在弹射出仓后做斜抛运动,在4个方位散开,其运动方式和运动轨迹符合设想。结果表明:增大电机转速可以增大牵引球在水平方向的速度和位移,增大弹簧刚性系数可以增大牵引球在竖直方向上的速度和位移;理想状态下,最佳电机转速为2000 °/s,弹簧刚度系数为80 N/m;与以往系统相比,该无人机回收伞降系统开伞时间仅为1.4033 s,开伞用时至少缩短了0.5 s。Abstract: In order to shorten the time of parachute opening, the ejecting dynamics of the UAV parachute ejection system is studied. By means of high-speed rotation, a traction ball is used to pull the parachute opening to increase the initial area of the opening and accelerate more airflow into the parachute. After building the 3D model of parachute ejection system using Solidworks, it was imported into Adams for kinematics simulation, and the simulation results were analyzed. The results show that the traction ball does oblique throw after ejection and spreads out in four directions. And increasing the motor speed can increase the velocity and displacement of the traction ball in the horizontal direction, and increasing the spring stiffness coefficient can also increase the stiffness and displacement of the traction ball in the vertical direction. Under the ideal condition, the optimal motor speed is 2000 °/s, and the spring stiffness coefficient is 80 N/m. Compared with the previous ejection system, the opening time of the UAV recovery parachute drop system is only 1.4033 s and shortened by at least 0.5 s.
-
表 1 零件之间的运动副设置
构件名称 约束作用类型 底座与大地 固定副 底座与推塞 圆柱副 底座与仓壳 旋转副 仓壳与降落伞 圆柱副 推塞与底座 弹簧力 推塞 压力 牵引球1与推塞与降落伞 接触力 牵引球2与推塞与降落伞 接触力 牵引球3与推塞与降落伞 接触力 牵引球4与推塞与降落伞 接触力  下载: 导出CSV
下载: 导出CSV
表 2 其余参数设置
参数 数值 降落伞质量 0.020 kg 小球材质 钢 小球直径 8 mm 仓壳外径 51 mm 仓壳壁厚 2 mm 弹簧刚度 80 N/m 弹簧力函数 Step(time,1,8,1.0001,−8) 预载荷 8 N 转速MOTION_1 −2000 °/s 转速MOTION_2 −2000 °/s 转速MOTION_3 −2000 °/s
下载: 导出CSV
表 3 不同类型降落伞的名义直径和开伞用时
降落伞类型 名义直径/m 开伞用时/s 太阳能无人机伞降系统 3.2 4 多旋翼无人机失控开伞系统 1.2 2.5 无人机伞降回收系统 2.8283 3.8 旋转牵引式降落伞弹射系统 1.3467 1.4033
下载: 导出CSV
-
[1] 宁雷鸣, 张红英, 秦福德, 等. 无人机伞降回收过程动力学建模与仿真[J]. 航天返回与遥感, 2012, 33(5): 24-32.NING L M, ZHANG H Y, QIN F D, et al. Modeling and simulation of UAV parachute recovery process[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(5): 24-32. (in Chinese) [2] 高兴龙, 张青斌, 高庆玉, 等. 无限质量降落伞充气动力学数值模拟[J]. 国防科技大学学报, 2017, 39(3): 58-63. doi: 10.11887/j.cn.201703010GAO X L, ZHANG Q B, GAO Q Y, et al. Numerical simulation on parachute's infinite mass inflation dynamics[J]. Journal of National University of Defense Technology, 2017, 39(3): 58-63. (in Chinese) doi: 10.11887/j.cn.201703010 [3] 吴翰, 王正平, 周洲, 等. 基于凯恩方程的无人机伞降回收动力学建模与仿真[J]. 北京航空航天大学学报, 2019, 45(6): 1256-1265. doi: 10.13700/j.bh.1001-5965.2018.0602WU H, WANG Z P, ZHOU Z, et al. Dynamics modeling and simulation of UAV parachute recovery based on Kane equation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6): 1256-1265. (in Chinese) doi: 10.13700/j.bh.1001-5965.2018.0602 [4] 孙山林, 孙鹏, 姚钘, 等. 无人机降落伞系统: 中国, 108688821A[P]. 2018-10-23SUN S L, SUN P, YAO X, et al. UAV parachute system: CN, 108688821A[P]. 2018-10-23. (in Chinese) [5] 刘新阳, 刘玉伟, 杨礼政. 降落伞弹射装置及无人机: 中国, 109436341A[P]. 2019-03-08LIU X Y, LIU Y W, YANG L Z. Parachute ejection device and UAV: CN, 109436341A[P]. 2019-03-08. (in Chinese) [6] 卓新, 庞兆君, 司骥跃, 等. 膛线式飞网发射器研究[J]. 兵器装备工程学报, 2019, 40(2): 39-43. doi: 10.11809/bqzbgcxb2019.02.008ZHUO X, PANG Z J, SI J Y, et al. Structure design and analysis of rifled netting launcher[J]. Journal of Ordnance Equipment Engineering, 2019, 40(2): 39-43. (in Chinese) doi: 10.11809/bqzbgcxb2019.02.008 [7] 李俊. 无人机伞降回收系统的设计与发展方向[C]//飞机机电系统理论与实践——第二届民用飞机机电系统国际论坛论文集. 南京: 中国航空学会, 2020: 156-159LI J. The design and development direction of parachute recovery system for unmanned aircraft[C]//Theory and Practice of Aircraft Electromechanical Systems -The Second International Forum on Civil Aircraft Electromechanical Systems. Nanjing: Chinese Society of Aeronautics and Astronautics, 2020: 156-159. (in Chinese) [8] 潘星, 曹义华. 降落伞开伞过程的多结点模型仿真[J]. 北京航空航天大学学报, 2008, 34(2): 188-192. doi: 10.13700/j.bh.1001-5965.2008.02.014PAN X, CAO Y H. Simulation of parachute's opening process with multi-node model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(2): 188-192. (in Chinese) doi: 10.13700/j.bh.1001-5965.2008.02.014 [9] 刘海涛, 张青斌, 杨乐平, 等. 空间绳网系统展开动力学特性分析[J]. 国防科技大学学报, 2015, 37(3): 68-77. doi: 10.11887/j.cn.201503012LIU H T, ZHANG Q B, YANG L P, et al. The deployment dynamic characteristics analysis of space web system[J]. Journal of National University of Defense Technology, 2015, 37(3): 68-77. (in Chinese) doi: 10.11887/j.cn.201503012 [10] 王睿, 周洲, 郭荣化, 等. 太阳能无人机伞降着陆多体动力学仿真与试验[J]. 航空学报, 2022, 43(8): 456-468. doi: 10.7527/j.issn.1000-6893.2022.8.hkxb202208033WANG R, ZHOU Z, GUO R H, et al. Multi-body dynamics simulation and experiment of solar-powered UAV parachute landing[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(8): 456-468. (in Chinese) doi: 10.7527/j.issn.1000-6893.2022.8.hkxb202208033 [11] 张业宏, 张晋明, 马冲, 等. 多旋翼无人机失控开伞系统的设计与实现[J]. 邢台职业技术学院学报, 2020, 37(5): 80-84. doi: 10.3969/j.issn.1008-6129.2020.05.019ZHANG Y H, ZHANG J M, MA C, et al. The design and realization of parachute opening system for uncontrolled multi-rotor unmanned aerial vehicle[J]. Journal of Xingtai Polytechnic College, 2020, 37(5): 80-84. (in Chinese) doi: 10.3969/j.issn.1008-6129.2020.05.019 [12] 吴翰, 王正平, 周洲, 等. 无人机伞降回收十二自由度模型建立与仿真[J]. 西北工业大学学报, 2020, 38(1): 68-74. doi: 10.3969/j.issn.1000-2758.2020.01.009WU H, WANG Z P, ZHOU Z, et al. Establishment and simulation of twelve-degree-of-freedom model for UAV parachute recovery system[J]. Journal of Northwestern Polytechnical University, 2020, 38(1): 68-74. (in Chinese) doi: 10.3969/j.issn.1000-2758.2020.01.009 [13] 赵端陆, 熊自明, 杜忠华, 等. 基于MATLAB的新型拦截射网三维外弹道仿真分析[J]. 兵器装备工程学报, 2021, 42(2): 58-62. doi: 10.11809/bqzbgcxb2021.02.011ZHAO D L, XIONG Z M, DU Z H, et al. Three-dimensional external trajectory simulation analysis of a new interceptor-fired net based on MATLAB[J]. Journal of Ordnance Equipment Engineering, 2021, 42(2): 58-62. (in Chinese) doi: 10.11809/bqzbgcxb2021.02.011 [14] 王德荣, 刘一鸣, 熊自明, 等. 基于Simulink的拦截射网质点外弹道仿真分析[J]. 信息技术与网络安全, 2019, 38(6): 102-106.WANG D R, LIU Y M, XIONG Z M, et al. Simulation analysis of mass point trajectory of interception network based on Simulink[J]. Information Technology and Network Security, 2019, 38(6): 102-106. (in Chinese) [15] 陈钦, 杨乐平, 张青斌. 空间飞网发射动力学建模仿真研究与地面试验[J]. 国防科技大学学报, 2009, 31(3): 16-19. doi: 10.3969/j.issn.1001-2486.2009.03.004CHEN Q, YANG L P, ZHANG Q B. Dynamic model and simulation of orbital net casting and ground test[J]. Journal of National University of Defense Technology, 2009, 31(3): 16-19. (in Chinese) doi: 10.3969/j.issn.1001-2486.2009.03.004 [16] 李武钢. 阻力系数和物体质量对斜抛运动影响的数值分析[J]. 广西师范学院学报(自然科学版), 2006, 23(2): 112-114. doi: 10.16601/j.cnki.issn1001-8743.2006.02.026Li W G. Number analysis of projectile motion affected by the air resistance and the object mass[J]. Journal of Guangxi Normal University (Natural Science Edition), 2006, 23(2): 112-114. (in Chinese) doi: 10.16601/j.cnki.issn1001-8743.2006.02.026 -






 点击查看大图
点击查看大图
图(18) / 表(3)
计量
- 文章访问数: 225
- HTML全文浏览量: 164
- PDF下载量: 28
- 被引次数: 0
