




Applying Improved Chaotic Sparrow Search Algorithm to SolvingInverse Kinematics of Redundant Manipulator
-
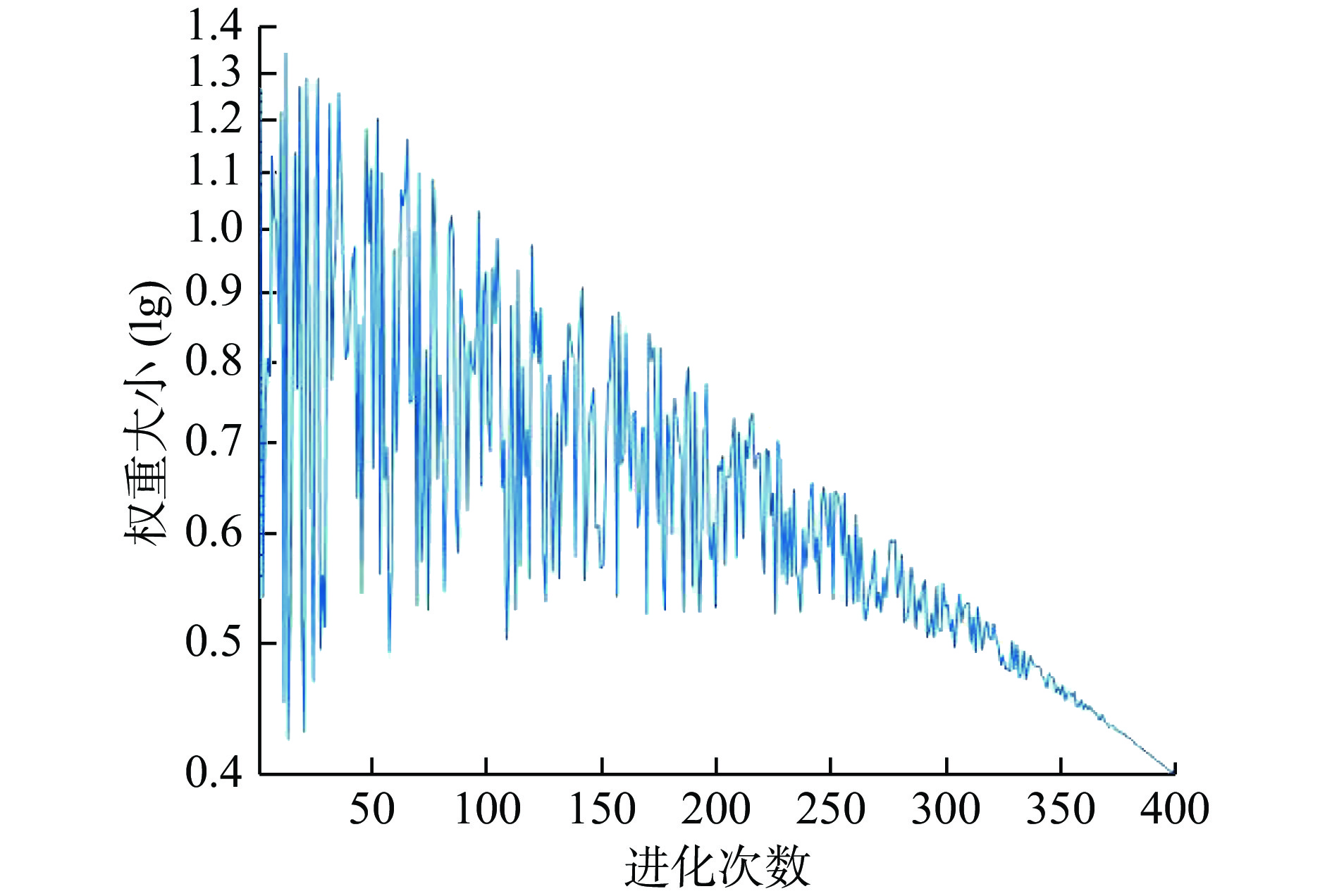
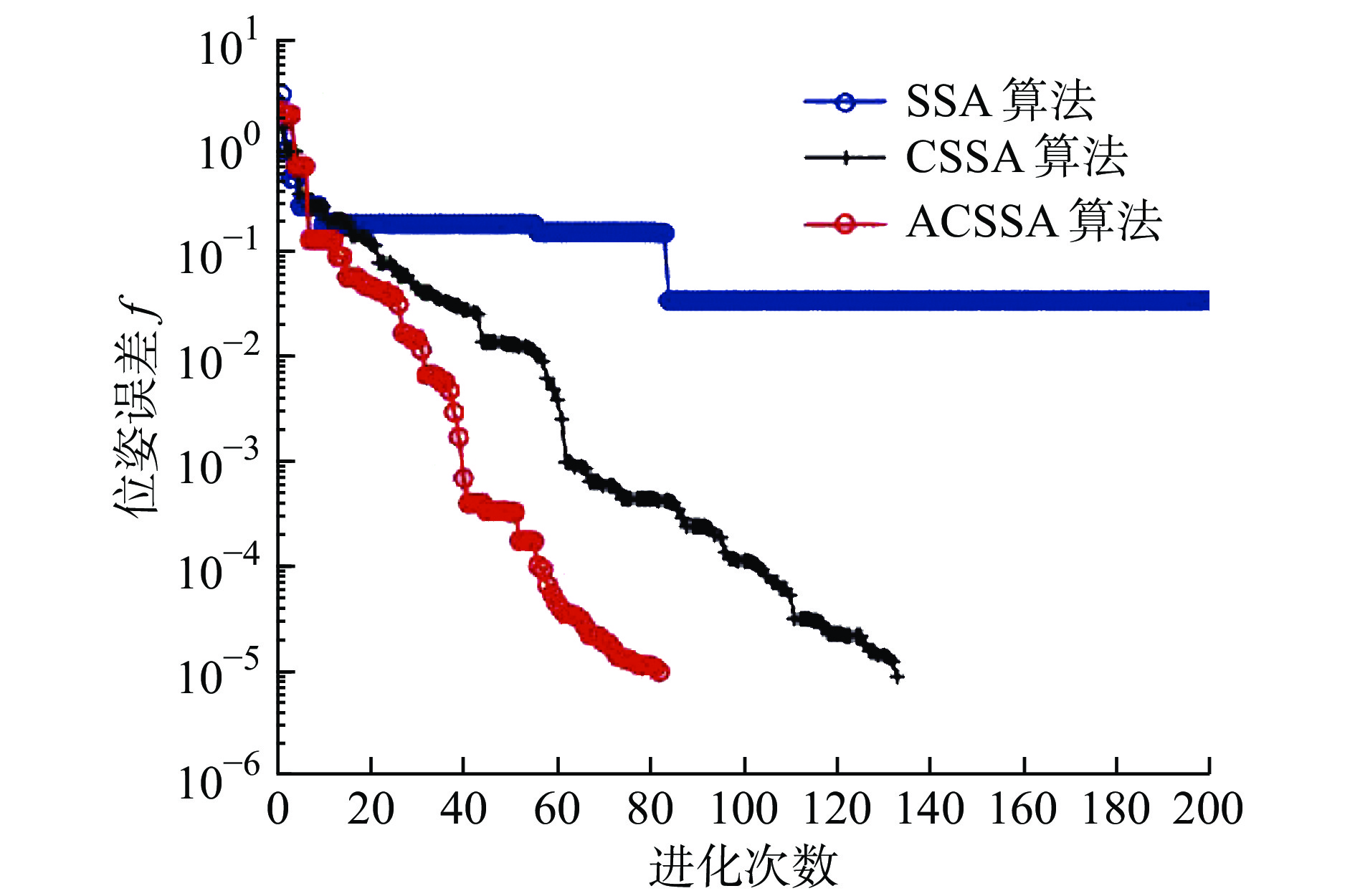
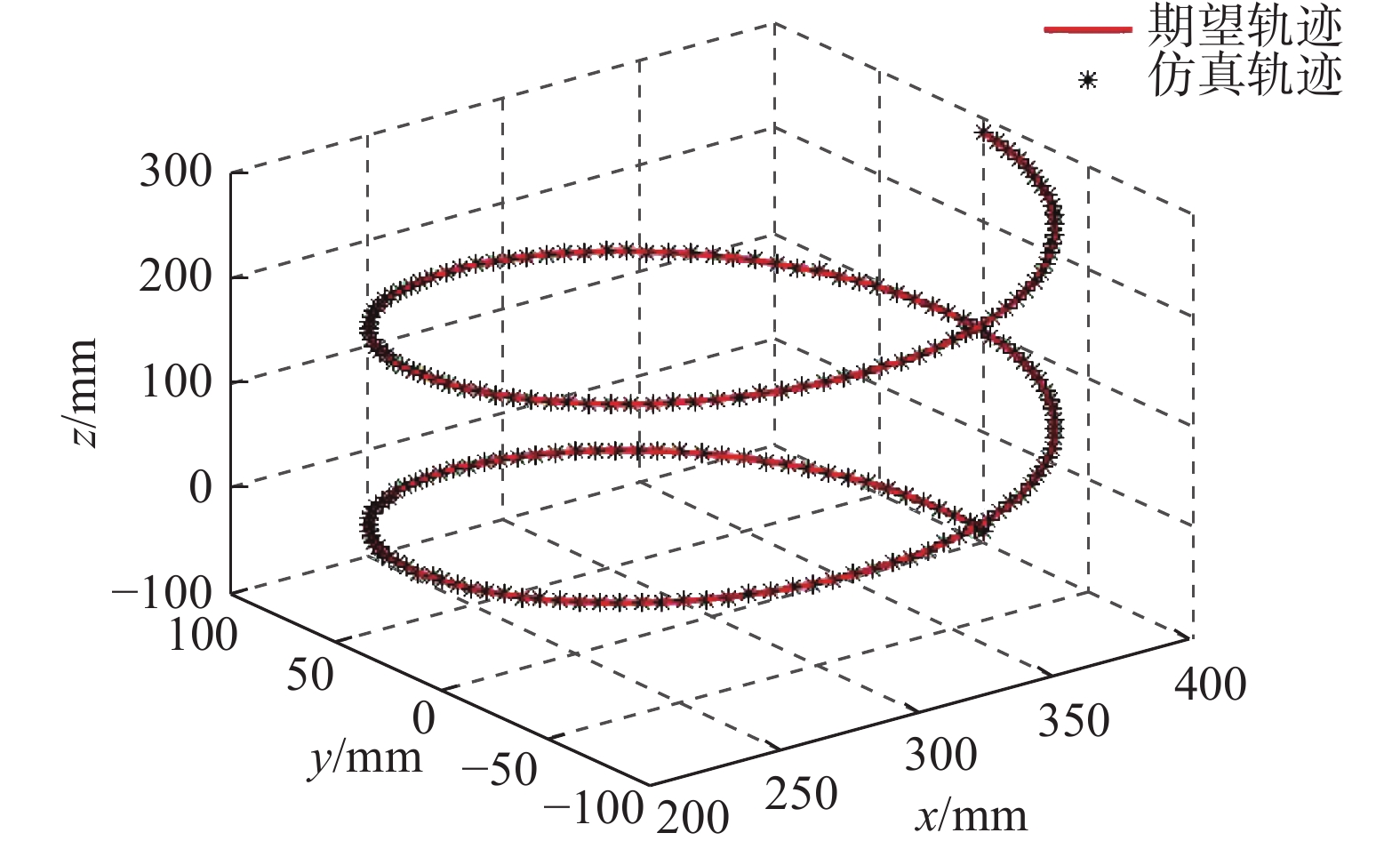
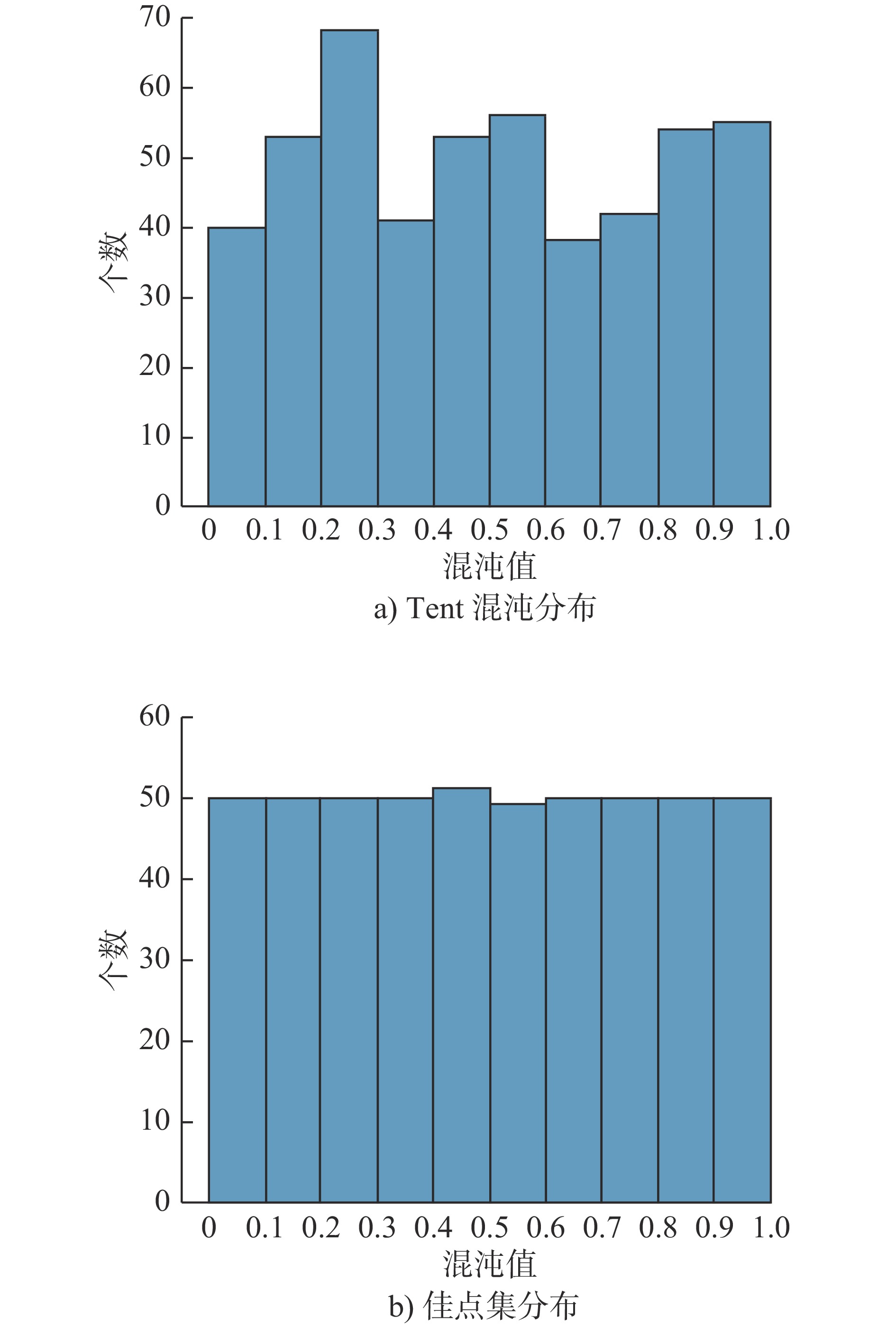
摘要: 针对冗余机械臂不满足Pieper准则,无法获得逆运动学封闭解的问题,提出一种自适应混沌麻雀搜索算法(ACSSA)。首先,利用佳点集均匀分布特性生成初始化种群;其次,引入自适应动态权重,用于平衡全局和局部搜索能力,提高种群多样性,改善陷入局部最优的问题;最后,引入高斯变异,加强局部搜索能力,同时产生Tent混沌序列,防止陷入局部最优。将ACSSA应用到冗余机械臂逆向运动学求解中,分别对空间点到点运动和空间连续轨迹跟踪两种工况进行仿真,并与CSSA和SSA进行对比。结果表明:在第一种工况下,ACSSA在收敛精度上提高了2个数量级,在算法稳定性上比CSSA、SSA分别高出2、3个数量级;第二种工况下,在计算值与理论值的绝对误差精度和稳定性这两个评定指标上,ACSSA 较CSSA提高了1个数量级,较SSA提高了6个数量级。充分说明了ACSSA具有精度高、收敛速度快的特性。Abstract: Because a redundant manipulator does not satisfy the Pieper criterion and is not able to obtain a closed inverse kinematics solution, we propose an adaptive chaotic sparrow search algorithm (ACSSA). Firstly, the uniform distribution characteristics of the good point set is used to generate the initial population. Secondly, the adaptive dynamic weight is introduced to balance global and local search capabilities, enhance population diversity and local optimization. Finally, the Gaussian mutation is introduced to strengthen the local search capability, and at the same time to generate a Tent chaotic sequence to prevent falling into local optimization. The ACSSA is applied to solving the inverse kinematics of the redundant manipulator. The two working conditions of spatial point-to-point motion and spatial continuous trajectory tracking are simulated, and compared with the chaotic sparrow search algorithm (CSSA) and the sparrow search algorithm (SSA). The results show that, in the first working condition, the ACSSA improves the convergence accuracy by 2 orders of magnitude, and its stability is 2 or 3 orders of magnitude higher than the CSSA and the SSA respectively. In the second working condition, the ACSSA is one order of magnitude higher than the CSSA and 6 orders of magnitude higher than the SSA in terms of the absolute error accuracy and the stability of calculated value and theoretical value. It fully shows that the ACSSA has the characteristics of high accuracy and fast convergence speed.
-
Key words:
- inverse kinematics /
- redundant manipulator /
- best point set /
- dynamic weights /
- sparrow search algorithm
-
表 1 冗余机械臂各关节D-H参数
关节i 变量 变量范围/(°) ai-1
/mmαi−1/(°) di/mm 1 θ1 −180 ~ 180 0 −90 580 2 θ2 −100 ~ 100 0 90 0 3 θ3 −180 ~ 180 0 −90 690 4 θ4 −120 ~ 90 90 90 0 5 θ5 −180 ~ 180 0 −90 880 6 θ6 −115 ~ 115 0 90 0 7 θ7 −360 ~ 360 0 0 150  下载: 导出CSV
下载: 导出CSV
表 2 3种算法各自求得的一组逆运动学解
关节角/rad ACSSA CSSA SSA θ1 0.99119 0.97464 1.00012 θ2 1.01189 1.03641 0.99987 θ3 0.99119 1.07177 0.99979 θ4 1.00000 1.00000 0.99991 θ5 0.97462 0.92288 0.99971 θ6 0.99272 0.97841 0.99966
下载: 导出CSV
表 3 3种算法独立运行200次时f1结果
mm 位姿误差f1 ACSSA CSSA SSA 最大值 5.48905 × 10−4 6.42113 × 10−2 0.09787 最小值 5.73837 × 10−6 8.69395 × 10−6 4.17924 × 10−5 平均值 1.93474 × 10−5 1.04144 × 10−3 0.00866 标准差 6.07342 × 10−5 4.64587 × 10−3 0.04744
下载: 导出CSV
表 4 轨迹理论点和实际点位置绝对误差
mm 位置绝对误差 ACSSA CSSA SSA 最大值 9.13618 × 10−4 0.01133 6.82737 × 102 最小值 1.00291 × 10−5 1.00077 × 10−5 47.47253 平均值 4.11963 × 10−5 2.71322 × 10−4 3.60283 × 102 标准差 1.47025 × 10−4 1.66532 × 10−3 1.38841 × 102
下载: 导出CSV
-
[1] 姜宏超, 刘士荣, 张波涛. 六自由度模块化机械臂的逆运动学分析[J]. 浙江大学学报(工学版), 2010, 44(7): 1348-1354. doi: 10.3785/j.issn.1008-973X.2010.07.021JIANG H C, LIU S R, ZHANG B T. Inverse kinematics analysis for 6 degree-of-freedom modular manipulator[J]. Journal of Zhejiang University (Engineering Science), 2010, 44(7): 1348-1354. (in Chinese) doi: 10.3785/j.issn.1008-973X.2010.07.021 [2] 王文杰, 陶庆, 王晓华, 等. 旋量理论和消元法在类达芬奇手术机器人逆运动学求解中的应用[J]. 机械科学与技术, 2021, 40(5): 734-740.WANG W J, TAO Q, WANG X H, et al. Application of screw theory and elimination method in inverse kinematics of Da Vinci-like surgical robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(5): 734-740. (in Chinese) [3] 于权伟, 李光, 肖帆, 等. 基于分离-重构技术的6R机器人逆解新方法[J]. 湖南工业大学学报, 2021, 35(2): 38-45.YU Q W, LI G, XIAO F, et al. A new method of inverse kinematics of 6R robots based on separation-reconstruction technique[J]. Journal of Hunan University of Technology, 2021, 35(2): 38-45. (in Chinese) [4] 石建平. 基于群智能优化算法的冗余机械臂运动学逆解研究[D]. 南昌: 南昌大学, 2020SHI J P. Research on inverse kinematics of redundant manipulator based on swarm intelligence optimization algorithm[D]. Nanchang: Nanchang University, 2020. (in Chinese) [5] MOHAMED A M, ARSHAD S A, ALAA H. A survey of multiple types of text summarization based on swarm intelligence optimization algorithms[J]. Knowledge-Based Systems, 2019, 163: 518-532. doi: 10.1016/j.knosys.2018.09.008 [6] 张熙峰, 田景文. 基于遗传算法的机械臂逆运动学问题解决方案[J]. 计算机工程与应用, 2017, 53(22): 150-156. doi: 10.3778/j.issn.1002-8331.1607-0007ZHANG X F, TIAN J W. Solution based on genetic algorithm for inverse problem of manipulator kinematics[J]. Computer Engineering and Applications, 2017, 53(22): 150-156. (in Chinese) doi: 10.3778/j.issn.1002-8331.1607-0007 [7] 武明虎, 周喜悦, 庆毅辉, 等. 基于改进自适应粒子群算法的机器人逆解研究[J]. 组合机床与自动化加工技术, 2021(1): 1-4.WU M H, ZHOU X Y, QING Y H, et al. Research on robot inverse kinematics based on improved adaptive particle swarm algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(1): 1-4. (in Chinese) [8] 周枫林, 游雨龙, 李光. 空间3R机械臂逆向运动学的奇异轨迹线方法研究[J]. 机械科学与技术, 2019, 38(3): 365-372.ZHOU F L, YOU Y L, LI G. A solving method for inverse kinematics of space 3R manipulator based on singular trajectory theory[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(3): 365-372. (in Chinese) [9] 石建平. 基于粒子群优化算法的冗余机械臂运动学逆解[J]. 贵阳学院学报(自然科学版), 2020, 15(3): 48-52.SHI J P. Inverse kinematics solution of redundant manipulator based on particle swarm optimization algorithm[J]. Journal of Guiyang University (Natural Sciences), 2020, 15(3): 48-52. (in Chinese) [10] 李梅红. 动态变步长果蝇算法求冗余机械臂逆运动学解[J]. 机械设计与研究, 2019, 35(3): 50-53.LI M H. Dynamic changing step fruit fly optimization algorithm for solving inverse kinematics problem of redundant manipulator[J]. Machine Design and Research, 2019, 35(3): 50-53. (in Chinese) [11] 曹鹏飞, 甘亚辉, 戴先中, 等. 物理受限冗余机械臂逆运动学凸优化求解[J]. 机器人, 2016, 38(3): 257-264.CAO P F, GAN Y H, DAI X Z, et al. Convex optimization solution for inverse kinematics of a physically constrained redundant manipulator[J]. Robot, 2016, 38(3): 257-264. (in Chinese) [12] 肖帆. 复杂多关节工业机器人逆解算法研究[D]. 株洲: 湖南工业大学, 2020XIAO F. Research on inverse kinematic algorithm of industrial robot with complex multiple joint[D]. Zhuzhou: Hunan University of Technology, 2020. (in Chinese) [13] XUE J K, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8(1): 22-34. [14] 吕鑫, 慕晓冬, 张钧, 等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720. doi: 10.13700/j.bh.1001-5965.2020.0298LYU X, MU X D, ZHANG J, et al. Chaos sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720. (in Chinese) doi: 10.13700/j.bh.1001-5965.2020.0298 [15] 肖赤心. 高维优化进化算法及其应用研究[D]. 长沙: 中南大学, 2009XIAO C X. Research on evolutionary algorithms for high dimensional optimization and their applications[D]. Changsha: Central South University, 2009. (in Chinese) [16] 毛清华, 张强. 融合柯西变异和反向学习的改进麻雀算法[J]. 计算机科学与探索, 2021, 15(6): 1155-1164. doi: 10.3778/j.issn.1673-9418.2010032MAO Q H, ZHANG Q. Improved sparrow algorithm combining Cauchy mutation and opposition-based learning[J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(6): 1155-1164. (in Chinese) doi: 10.3778/j.issn.1673-9418.2010032 [17] 肖帆, 李光, 游雨龙. 空间3R机械手逆向运动学的多模块神经网络求解[J]. 中国机械工程, 2019, 30(10): 1233-1238. doi: 10.3969/j.issn.1004-132X.2019.10.014XIAO F, LI G, YOU Y L. Multiple module neural network solving for inverse kinematics of space 3R manipulators[J]. China Mechanical Engineering, 2019, 30(10): 1233-1238. (in Chinese) doi: 10.3969/j.issn.1004-132X.2019.10.014 [18] 林阳, 赵欢, 丁汉. 基于多种群遗传算法的一般机器人逆运动学求解[J]. 机械工程学报, 2017, 53(3): 1-8. doi: 10.3901/JME.2017.03.001LIN Y, ZHAO H, DING H. Solution of inverse kinematics for general robot manipulators based on multiple population genetic algorithm[J]. Journal of Mechanical Engineering, 2017, 53(3): 1-8. (in Chinese) doi: 10.3901/JME.2017.03.001 [19] 肖帆, 李光, 杨加超, 等. 改进CMA-ES算法及其在7自由度仿人臂逆运动学求解中的应用[J]. 机械科学与技术, 2020, 39(6): 844-851.XIAO F, LI G, YANG J C, et al. Applying improved CMA-ES algorithm to solve inverse kinematics of 7-DOF humanoid arm[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(6): 844-851. (in Chinese) -




 点击查看大图
点击查看大图
图(7) / 表(4)
计量
- 文章访问数: 182
- HTML全文浏览量: 73
- PDF下载量: 23
- 被引次数: 0
