




Sideslip Angle Fusion Estimation Method of Independent Drive Electric Vehicle
-
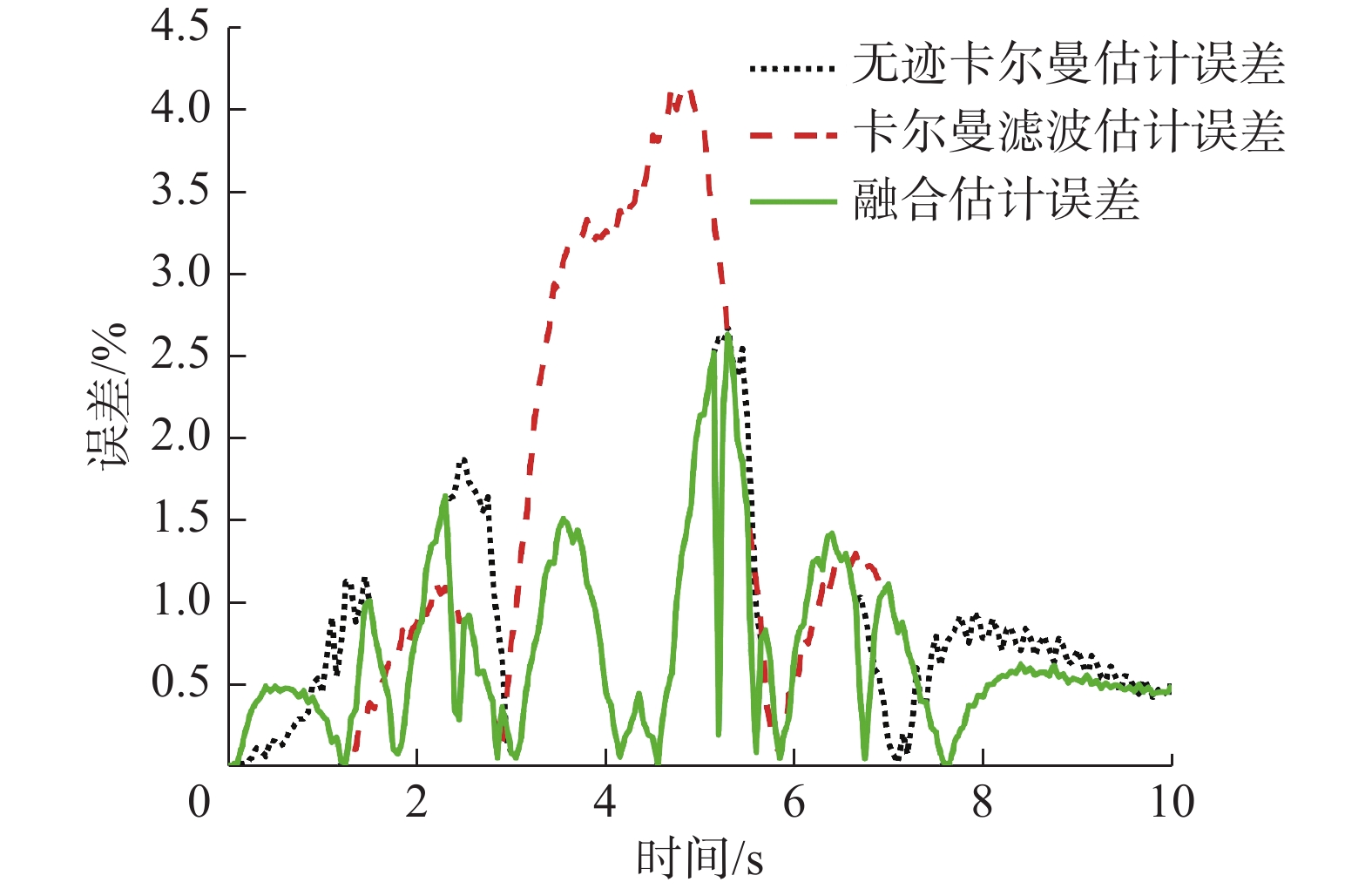
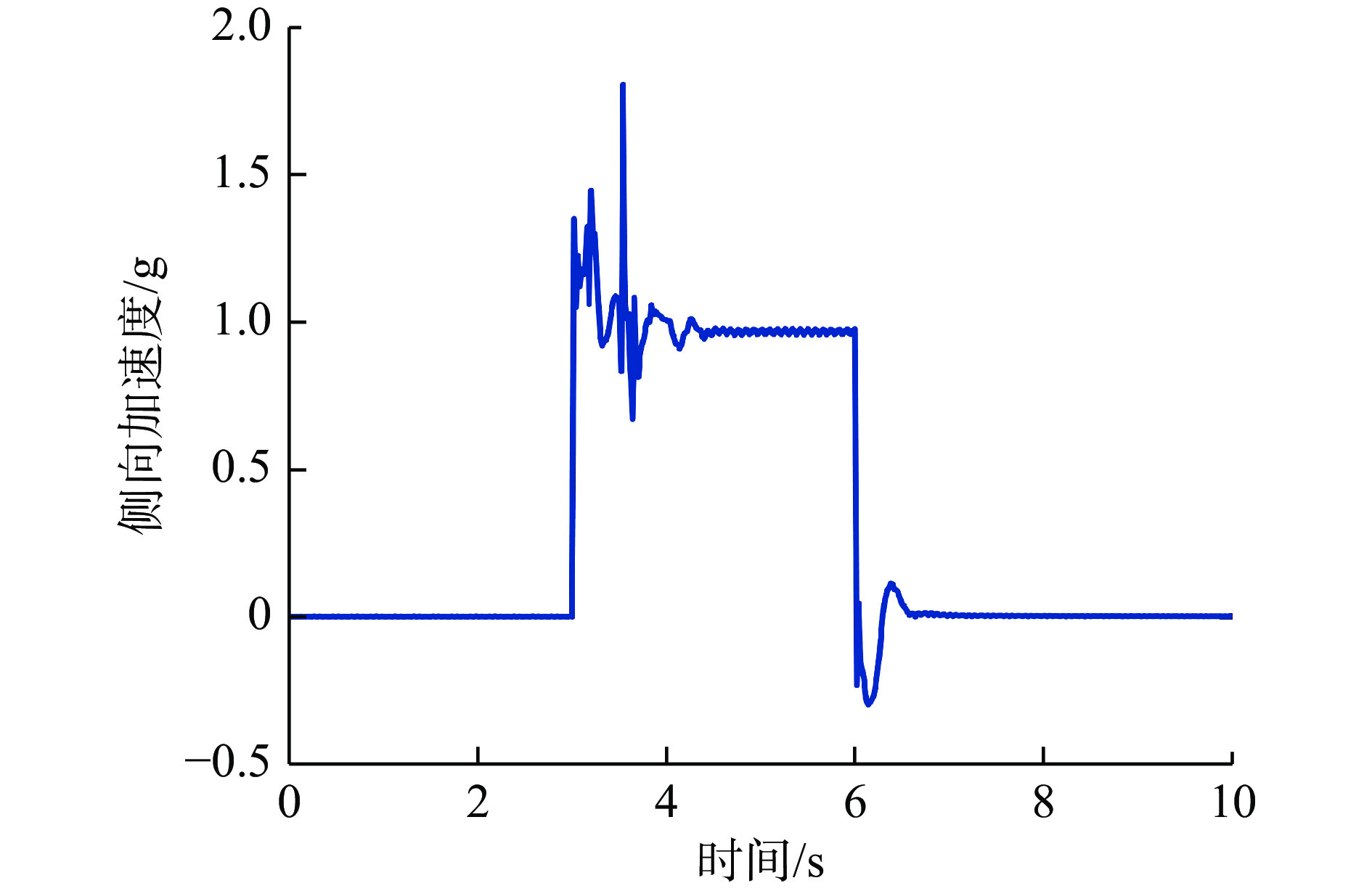
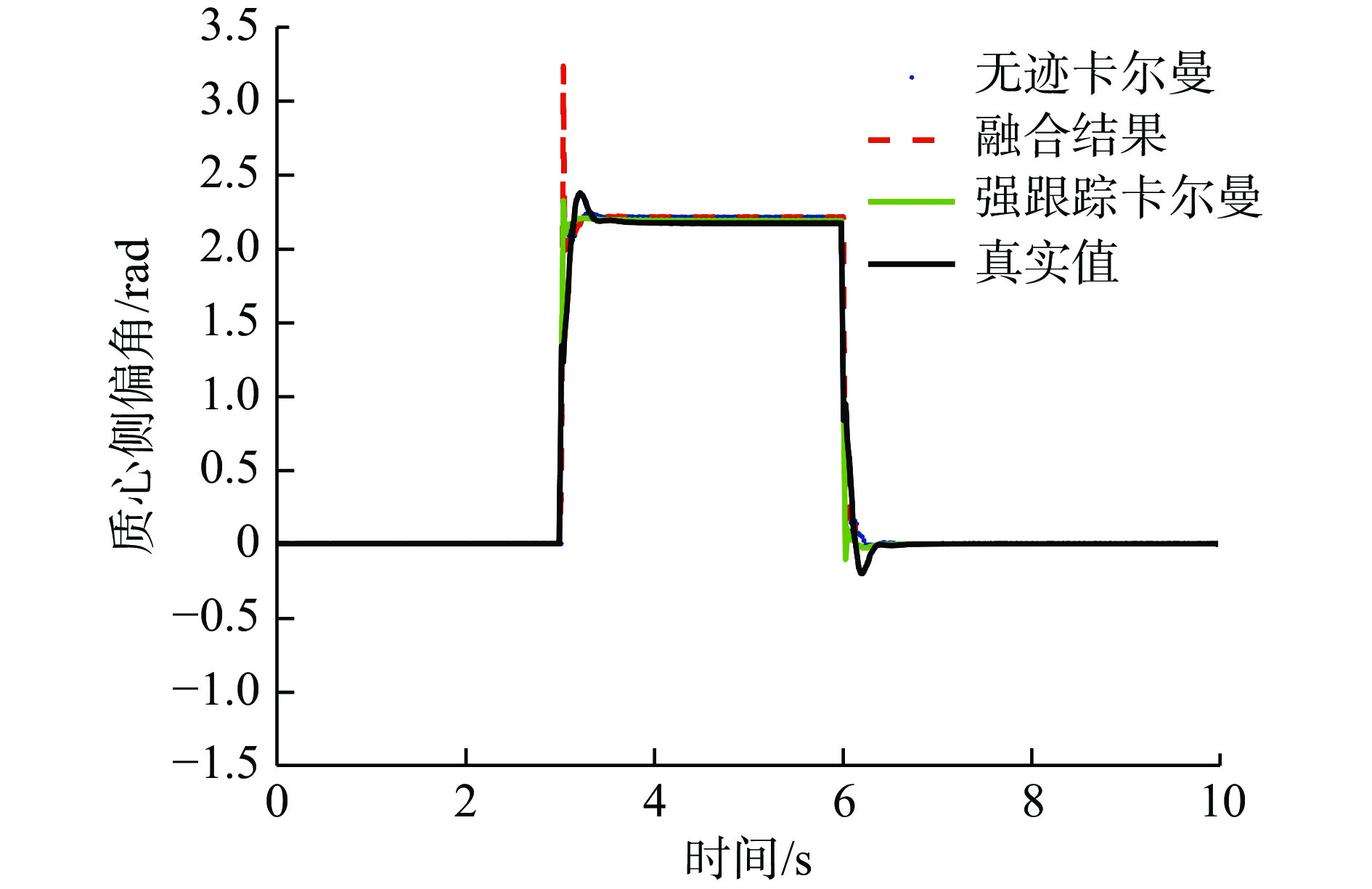
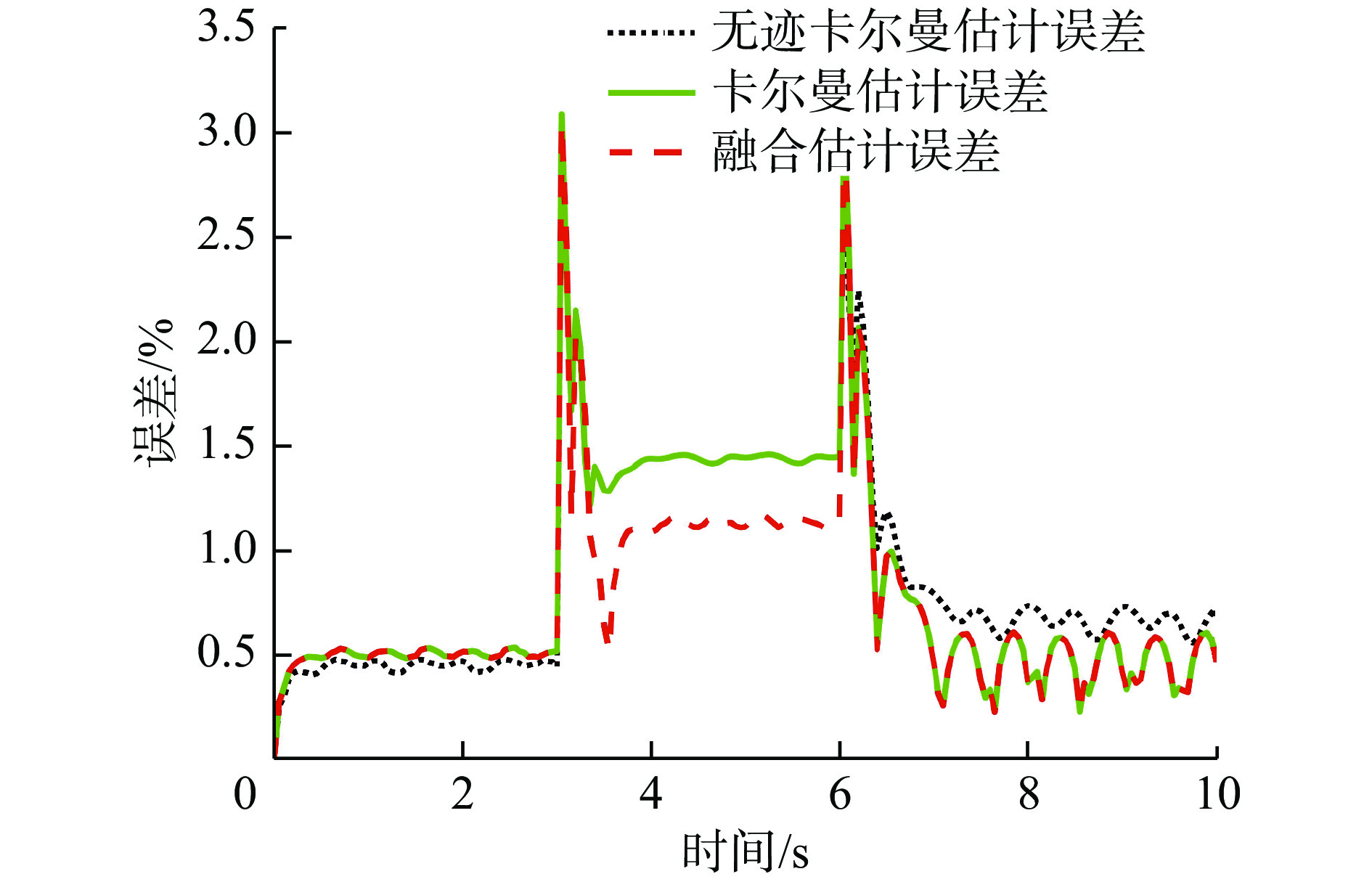
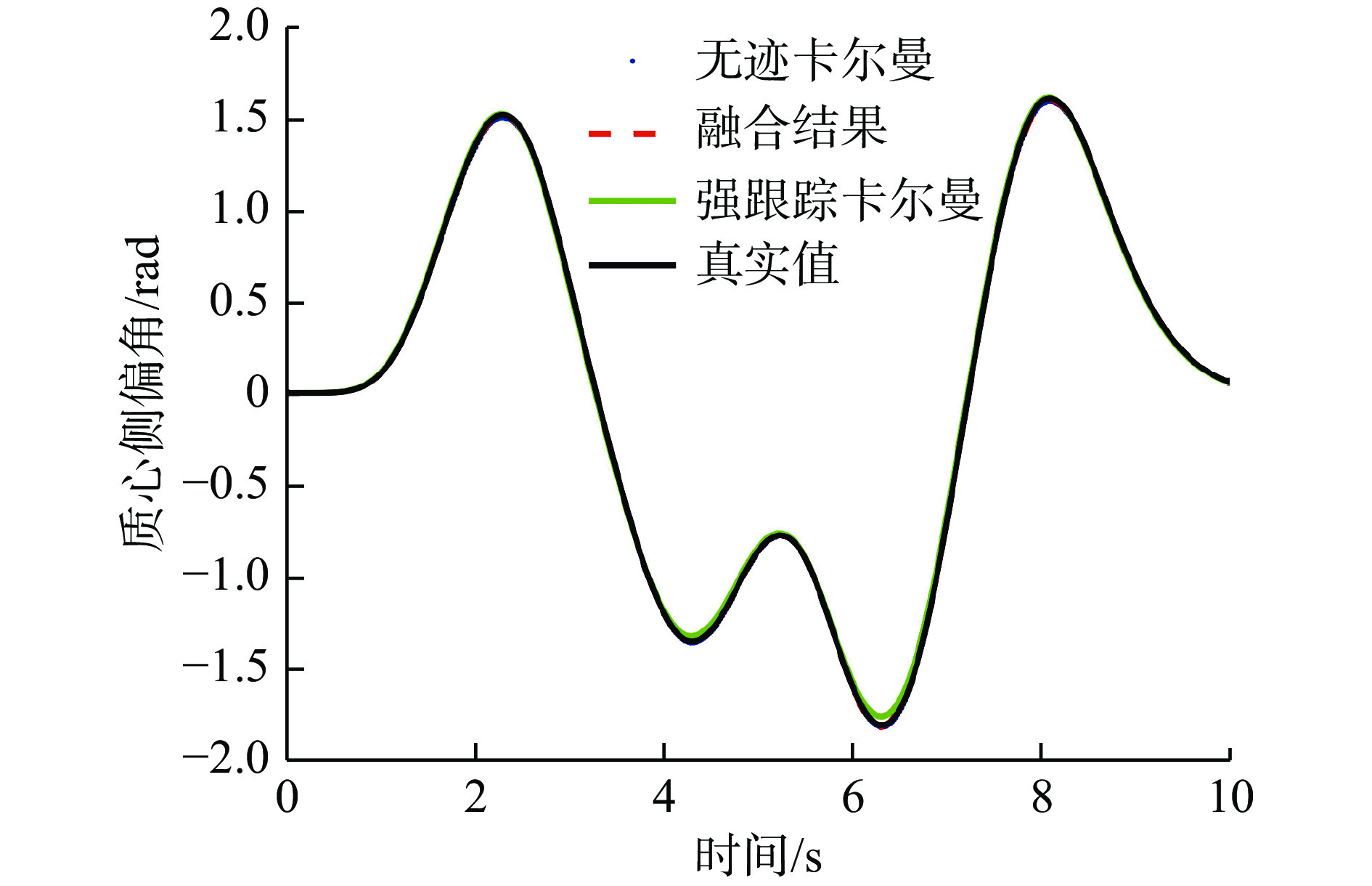
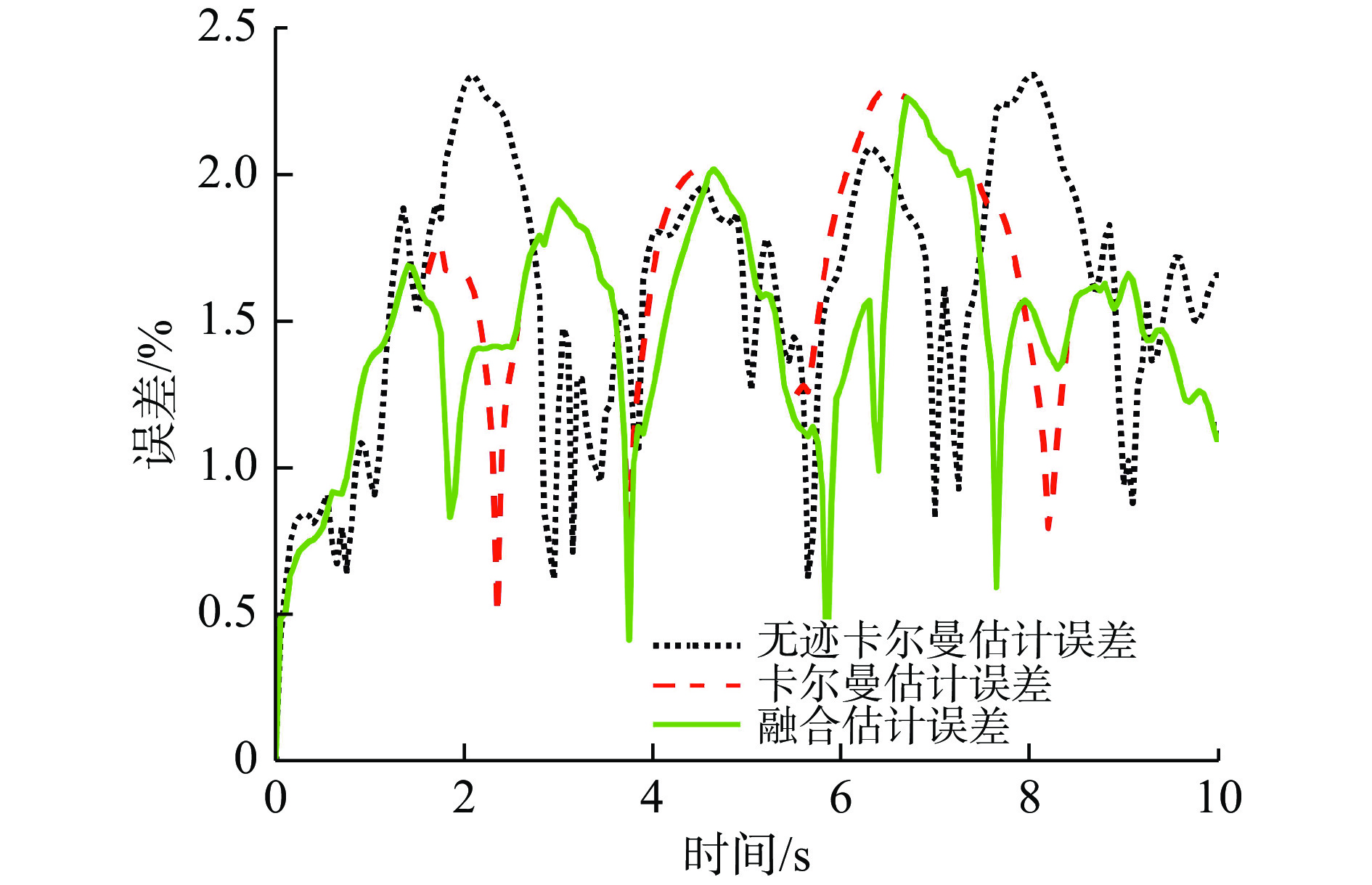
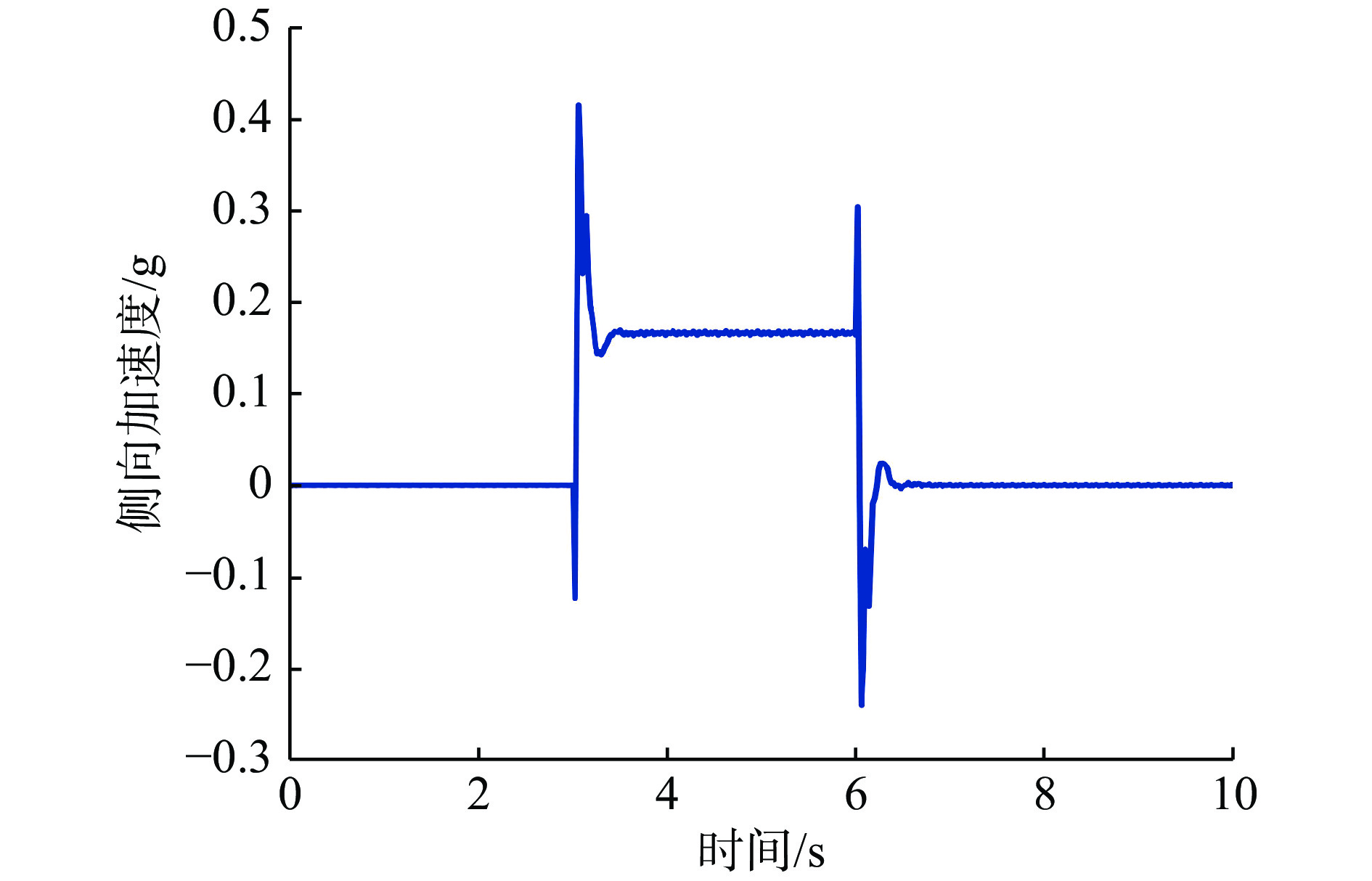
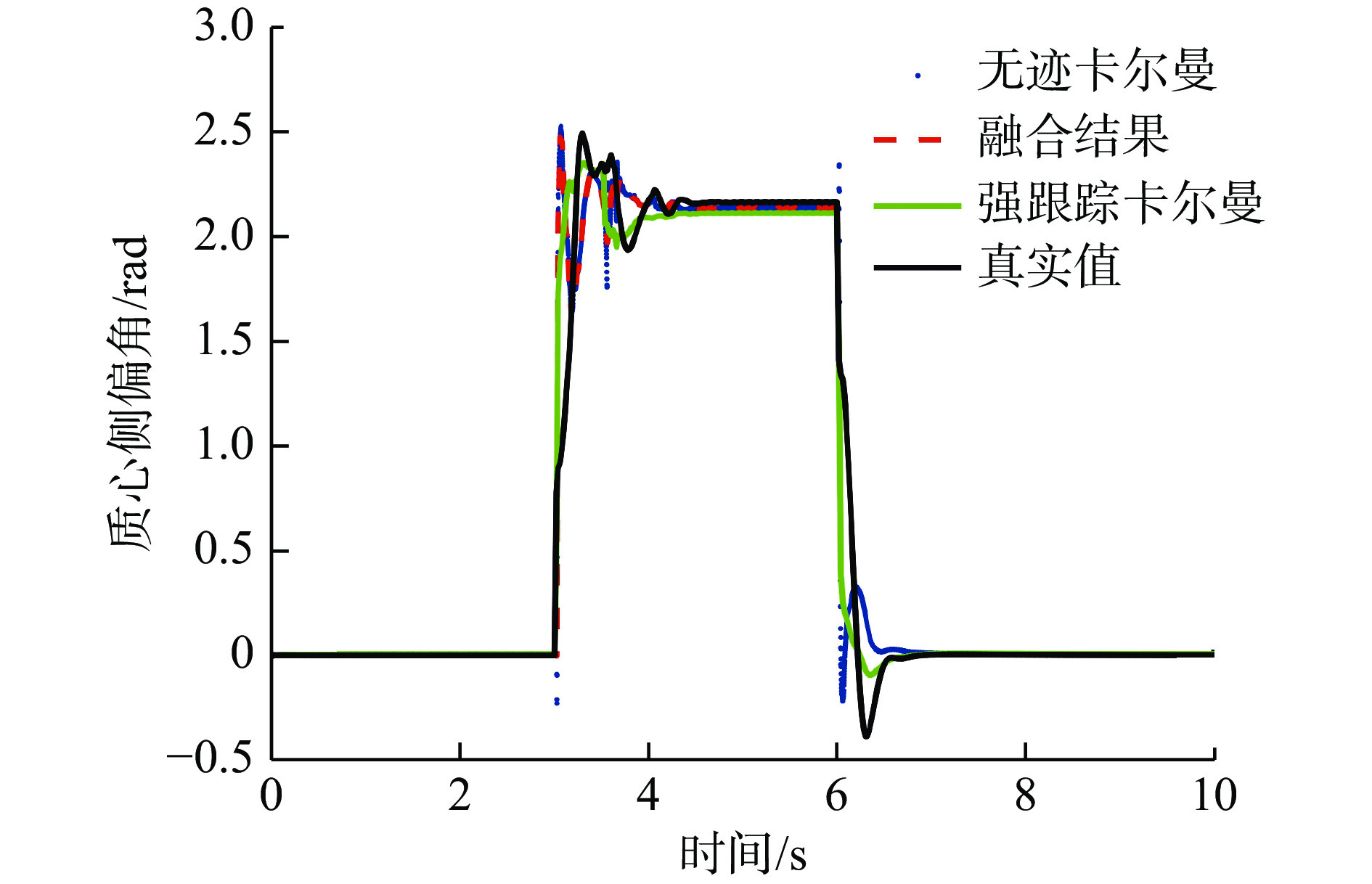
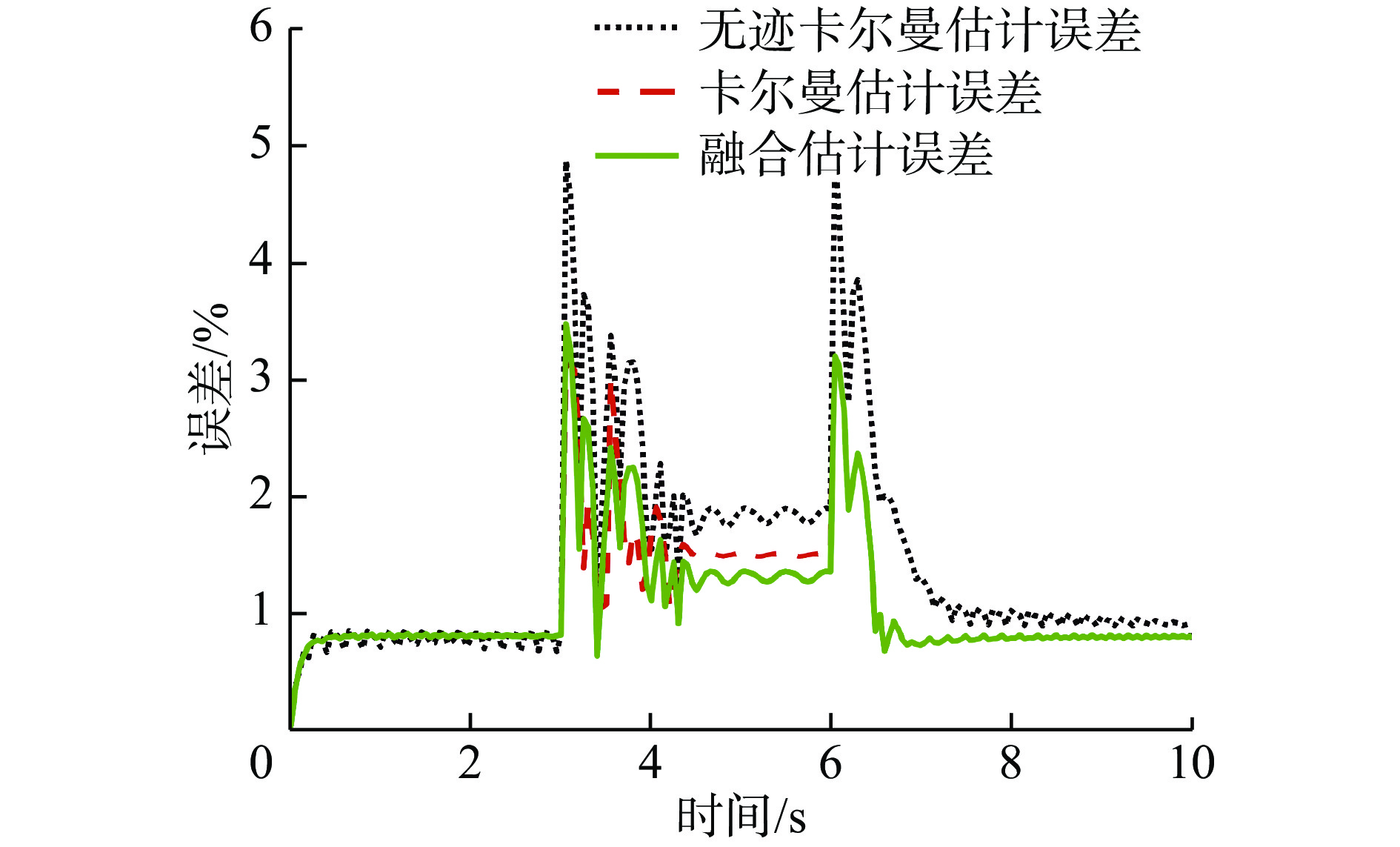
摘要: 针对传统质心侧偏角估计精度低、实时性差等问题,把四轮独立驱动电动汽车作为研究对象,提出一种基于强跟踪卡尔曼滤波及无迹卡尔曼滤波融合估计的质心侧偏角估计方法。由于汽车在侧向加速度较小时车辆动力学特性基本呈线性变化,此时通过强跟踪卡尔曼滤波快速估计,当汽车侧向加速度较大时车辆动力学特性趋于非线性变化,通过无迹卡尔曼滤波准确估计。最后将两种估计方法的数据融合,完成不同车速不同工况下对车辆质心侧偏角的估计。搭建Simulink-Carsim联合仿真平台对提出的方法进行验证,结果表明该方法在保证估计精度的同时具有较好的实时跟踪效果及鲁棒性。Abstract: Aiming at the problems of poor accuracy and poor real-time estimation of traditional sideslip angle, a new sideslip angle estimation method based on strong tracking Kalman filter and unscented Kalman filter fusion estimation is proposed for four-wheel independent drive electric vehicle. Since the vehicle dynamics characteristics are roughly linear when the lateral acceleration is small, the strong tracking Kalman filter is used to quickly estimate the sideslip angle at this time. When the lateral acceleration of the vehicle is larger, the vehicle dynamics characteristics tend to be nonlinear, the sideslip angle can be accurately estimated by unscented Kalman filter. Finally, the data of the two estimation methods are fused to realize the estimation of the sideslip angle under different vehicle speeds and different working conditions. The Simulink-Carsim joint simulation platform is built to verify the proposed method. The results show that the method has good real-time tracking effect and robustness while ensuring the estimation accuracy.
-
表 1 车辆仿真参数
参数 数值 整车质量/kg 1350 绕z轴转动惯量/(kg·m2) 1343.1 质心至前轴距离/m 1.04 质心至后轴距离/m 1.56 质心高度/mm 540 轮距/mm 1480 轮胎半径/mm 316  下载: 导出CSV
下载: 导出CSV
-
[1] CHEN L, LI P S, LIN W S, et al. Observer-based fuzzy control for four-wheel independently driven electric vehicles with active steering systems[J]. International Journal of Fuzzy Systems, 2020, 22(1): 89-100 doi: 10.1007/s40815-019-00770-3 [2] 陈慧, 高博麟, 徐帆. 车辆质心侧偏角估计综述[J]. 机械工程学报, 2013, 49(24): 76-94 doi: 10.3901/JME.2013.24.076CHEN H, GAO B L, XU F. Review on vehicle sideslip angle estimation[J]. Journal of Mechanical Engineering, 2013, 49(24): 76-94 (in Chinese) doi: 10.3901/JME.2013.24.076 [3] 李小雨, 许男, 郭孔辉. 基于运动学方法和运动几何方法融合的质心侧偏角估计[J]. 机械工程学报, 2020, 56(2): 121-129 doi: 10.3901/JME.2020.02.121LI X Y, XU N, GUO K H. Vehicle sideslip angle estimation based on fusion of kinematic method and kinematic-geometry method[J]. Journal of Mechanical Engineering, 2020, 56(2): 121-129 (in Chinese) doi: 10.3901/JME.2020.02.121 [4] 陈特, 蔡英凤, 陈龙, 等. 车辆纵向力和质心侧偏角层级估计方法设计与验证[J]. 西安交通大学学报, 2019, 53(11): 131-140 + 147 doi: 10.7652/xjtuxb201911019CHEN T, CAI Y F, CHEN L, et al. Design and verification for vehicle longitudinal force and sideslip angle hierarchical estimation method[J]. Journal of Xi'an Jiaotong University, 2019, 53(11): 131-140 + 147 (in Chinese) doi: 10.7652/xjtuxb201911019 [5] VENHOVENS P J T, NAAB K. Vehicle dynamics estimation using Kalman filters[J]. Vehicle System Dynamics, 1999, 32(2-3): 171-184 doi: 10.1076/vesd.32.2.171.2088 [6] 武冬梅, 丁海涛, 郭孔辉. 基于线性估计模型的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2014, 44(4): 901-906WU D M, DING H T, GUO K H. Sideslip angle estimation based on linear estimation model for electric vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(4): 901-906 (in Chinese) [7] STRANO S, TERZO M. Constrained nonlinear filter for vehicle sideslip angle estimation withno a priori knowledge of tyre characteristics[J]. Control Engineering Practice, 2018, 71: 10-17 doi: 10.1016/j.conengprac.2017.10.004 [8] HONG S, LEE C, BORRELLI F, et al. A novel approach for vehicle inertial parameter identification using a dual Kalman filter[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 151-161 doi: 10.1109/TITS.2014.2329305 [9] CHEN T, CHEN L, XU X, et al. Reliable sideslip angle estimation of four-wheel independent drive electric vehicle by information Iteration and Fusion[J]. Mathematical Problems in Engineering, 2018, 2018: 9075372 [10] KIM D, MIN K, KIM H, et al. Vehicle sideslip angle estimation using deep ensemble-based adaptive Kalman filter[J]. Mechanical Systems and Signal Processing, 2020, 144: 106862 doi: 10.1016/j.ymssp.2020.106862 [11] 张家旭, 李静. 采用自适应无迹卡尔曼滤波器的车速和路面附着系数估计[J]. 西安交通大学学报, 2016, 50(3): 68-75ZHANG J X, LI J. Estimation of vehicle speed and tire-road adhesion coefficient by adaptive unscented Kalman filter[J]. Journal of Xi'an Jiaotong University, 2016, 50(3): 68-75 (in Chinese) [12] HEIDFELD H, SCHÜNEMANN M, KASPER R. UKF-based State and tire slip estimation for a 4WD electric vehicle[J]. Vehicle System Dynamics, 2020, 58(10): 1479-1496 doi: 10.1080/00423114.2019.1648836 [13] 王震坡, 薛雪, 王亚超. 基于自适应无迹卡尔曼滤波的分布式驱动电动汽车车辆状态参数估计[J]. 北京理工大学学报, 2018, 38(7): 698-702WANG Z P, XUE X, WANG Y C. State parameter estimation of distributed drive electric vehicle based on adaptive unscented Kalman filter[J]. Transactions of Beijing Institute of Technology, 2018, 38(7): 698-702 (in Chinese) [14] HASSAN M A, ABDELKAREEM M A A, MOHEYELDEIN M M, et al. Advanced study of tire characteristics and their influence on vehicle lateral stability and untripped rollover threshold[J]. Alexandria Engineering Journal, 2020, 59(3): 1613-1628 doi: 10.1016/j.aej.2020.04.008 [15] 李以农, 赵树恩, 米林, 等. 基于强跟踪滤波的车辆非线性状态估计[J]. 江苏大学学报(自然科学版), 2009, 30(6): 564-568LI Y N, ZHAO S E, MI L, et al. Vehicle nonlinear state estimation based on strong tracking filter[J]. Journal of Jiangsu University (Natural Science Edition), 2009, 30(6): 564-568 (in Chinese) [16] DU Z L, LI X M. Strong tracking tobit Kalman filter with model uncertainties[J]. International Journal of Control, Automation and Systems, 2019, 17(2): 345-355 doi: 10.1007/s12555-017-0655-4 [17] CHEN T, XU X, CHEN L, et al. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles[J]. Mechanical Systems and Signal Processing, 2018, 101: 377-388 doi: 10.1016/j.ymssp.2017.08.041 [18] REN M J, SUN L J, LIU M Y, et al. A weighted least square based data fusion method for precision measurement of freeform surfaces[J]. Precision Engineering, 2017, 48: 144-151 doi: 10.1016/j.precisioneng.2016.11.014 -





 点击查看大图
点击查看大图
图(18) / 表(1)
计量
- 文章访问数: 220
- HTML全文浏览量: 112
- PDF下载量: 26
- 被引次数: 0
