




Mechanism Theory and Motion Control of Humanoid Wrist Actuated by Shape Memory Alloy
-
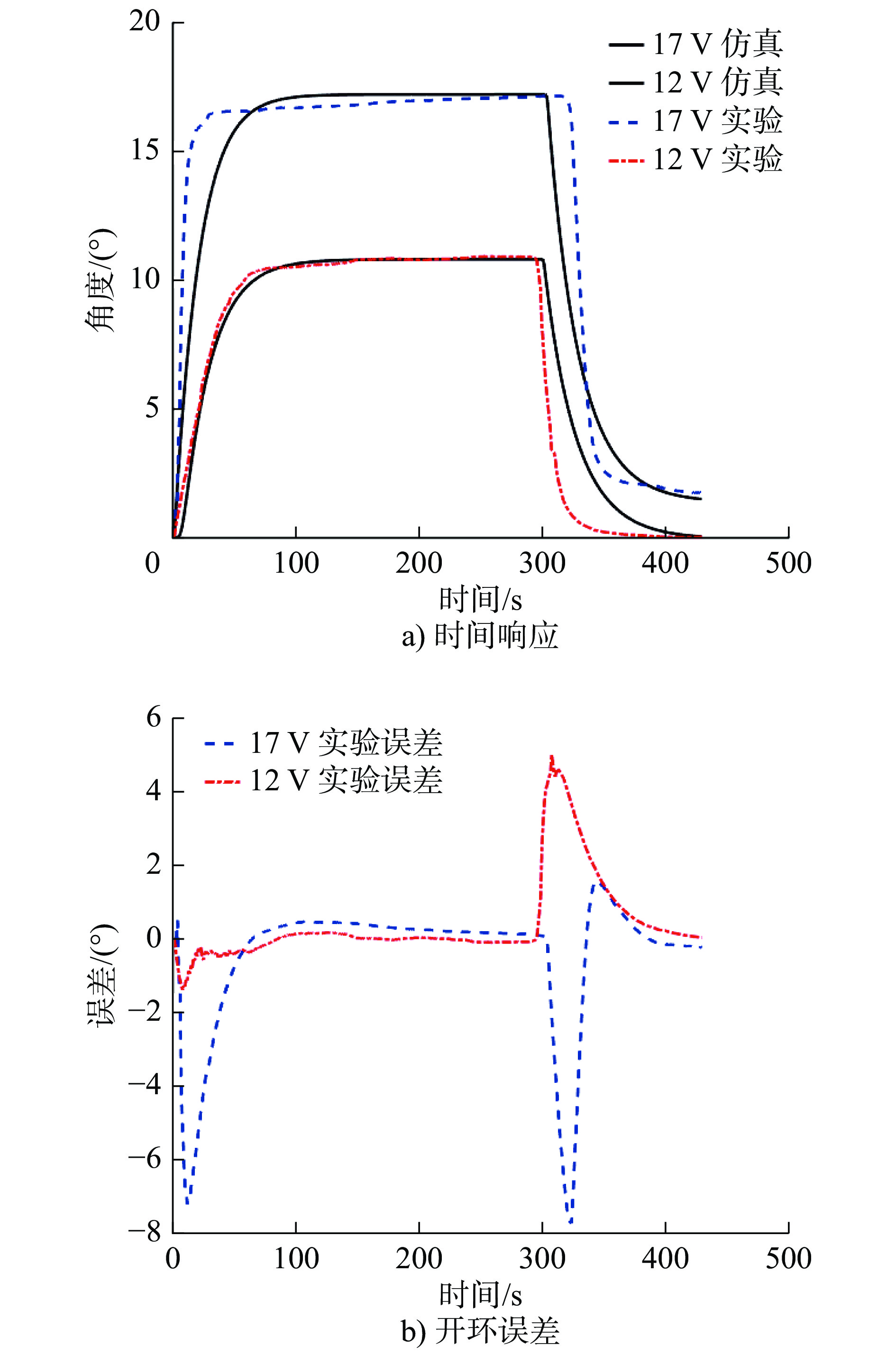
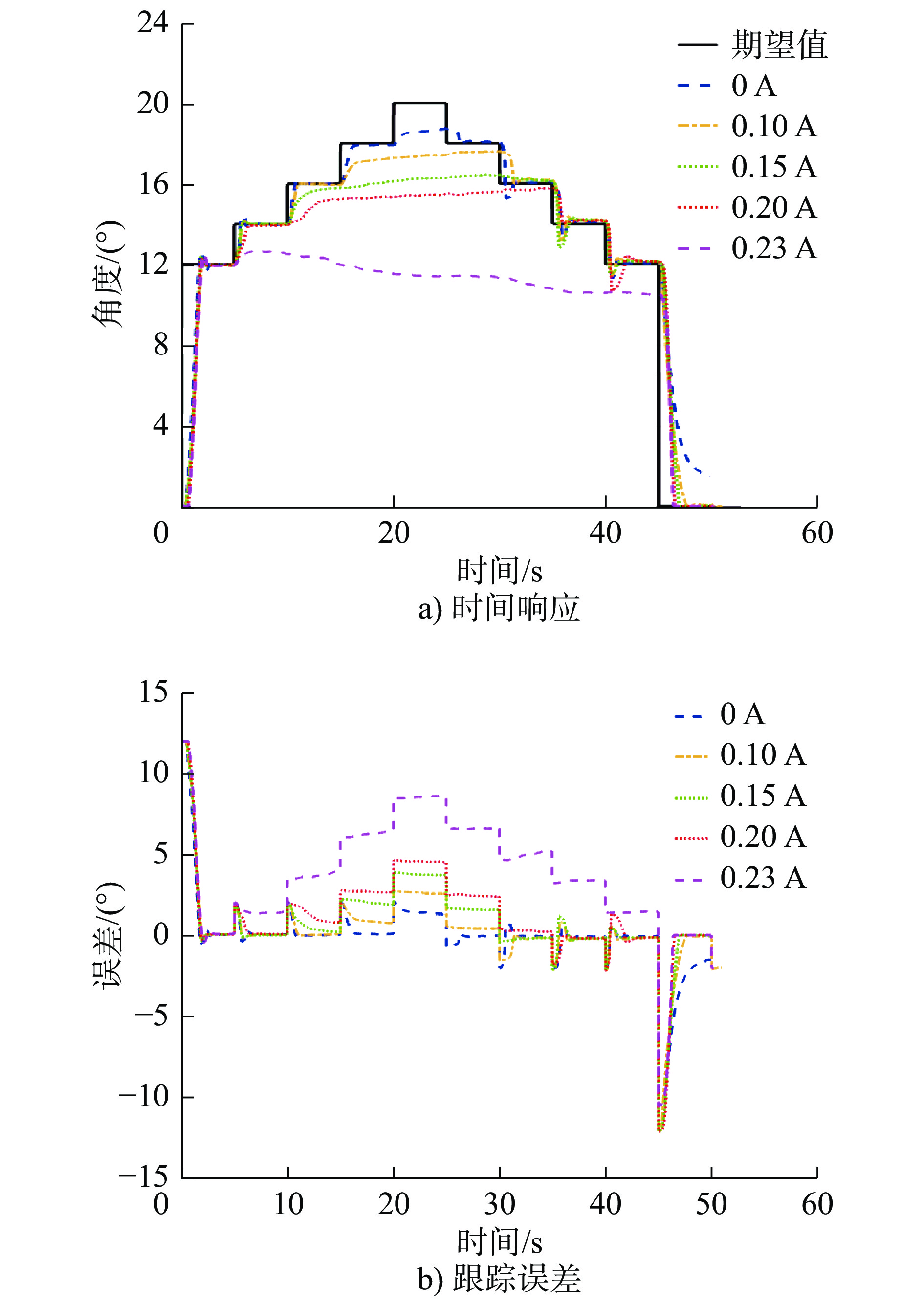
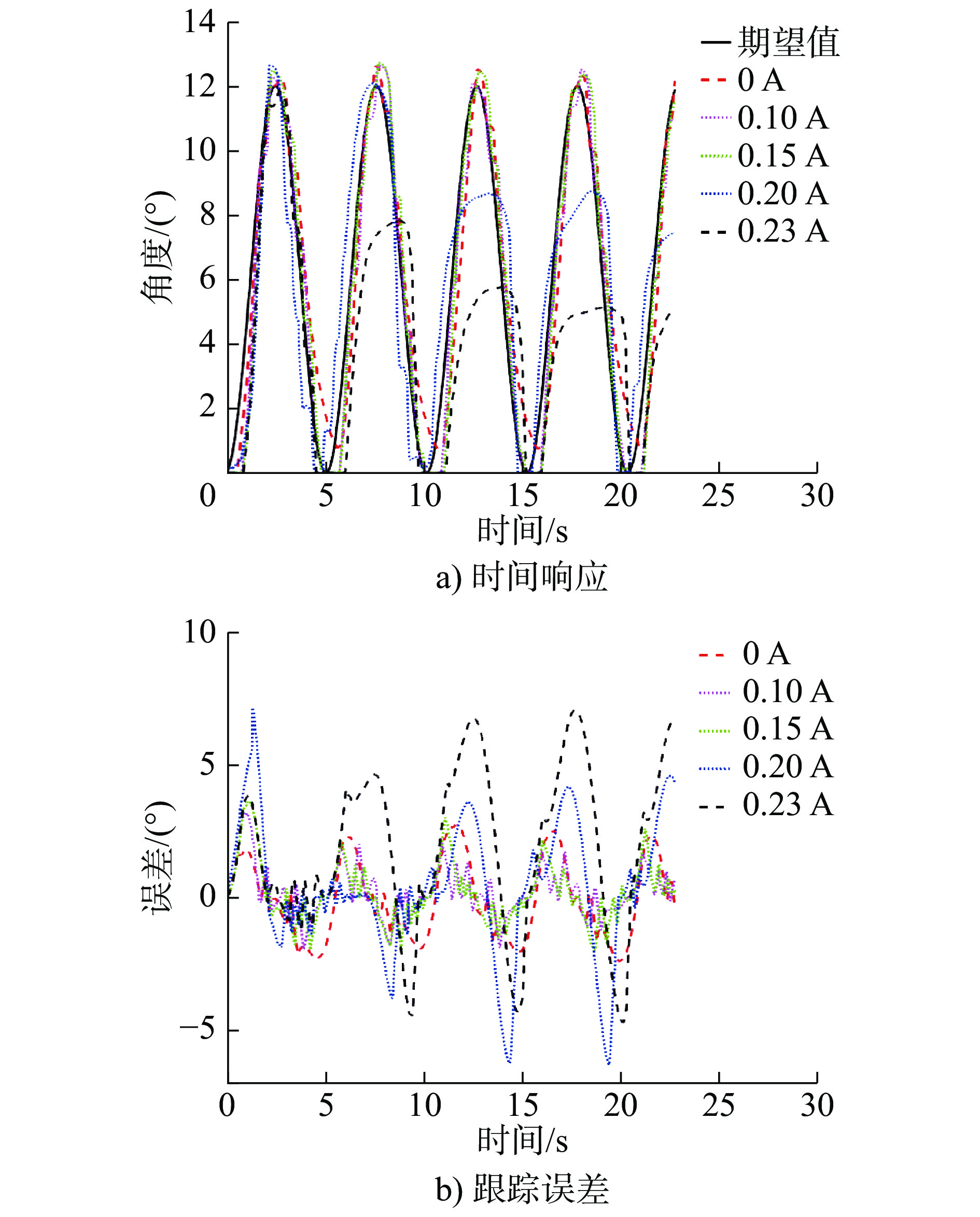
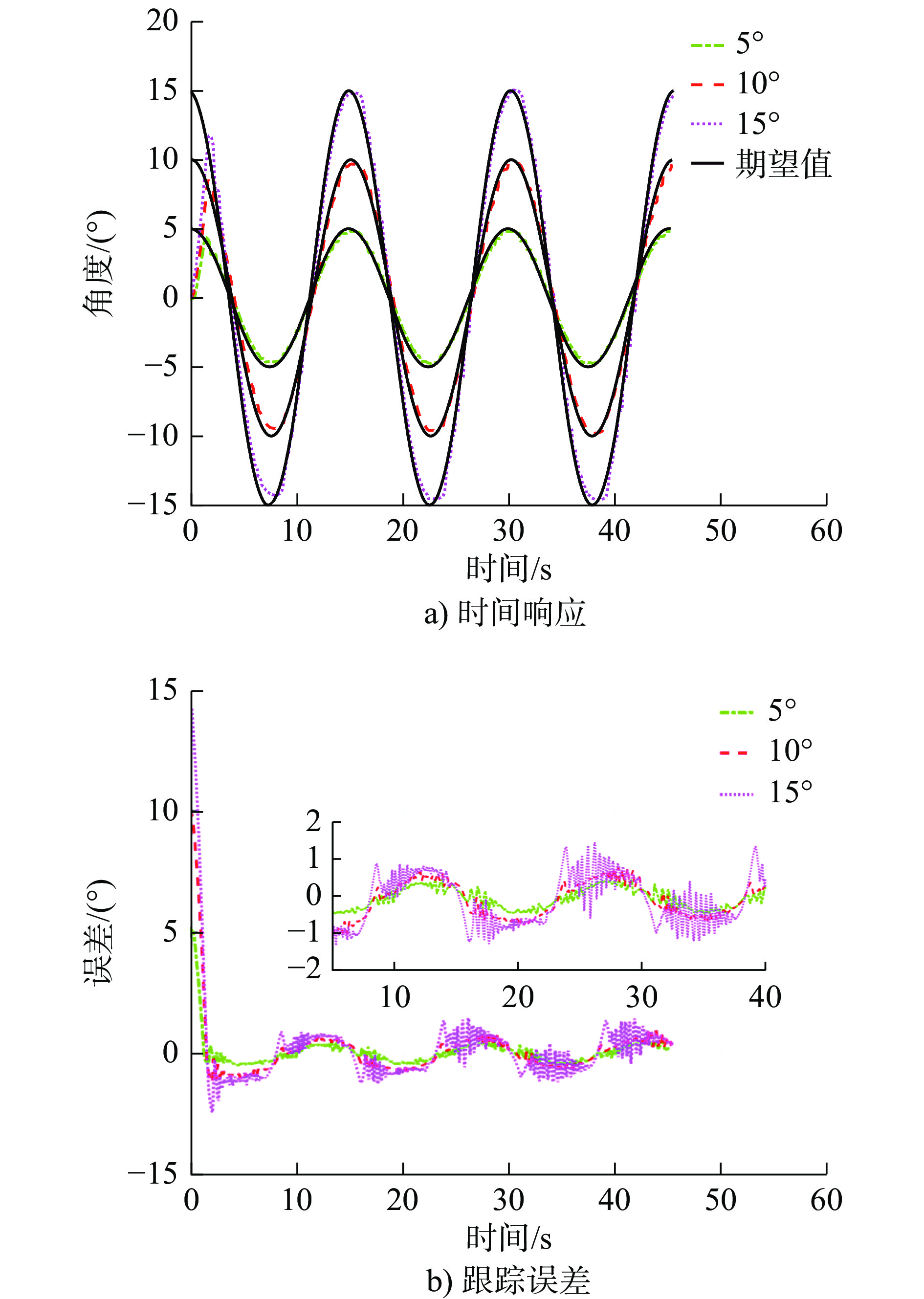
摘要: 为提高仿人腕关节的运动性能,设计了一款形状记忆合金驱动的仿人腕关节样机,采用拮抗驱动方式实现对仿人腕关节的位置控制,并在相关理论和仿真分析的基础上,通过实验证明该系统模型具有一定的精度。通过样机运动控制实验,研究了拮抗驱动方式对系统运动性能的影响。结果表明,在拮抗驱动方式的不同频率信号跟踪实验中,对于单向正弦信号,跟踪误差最小为[−0.5°, 1°],最大为[−1.5°, 1.5°];对于双向正弦信号,腕关节能实现双向连续偏转,且当信号频率为1/15 Hz时,位置误差均小于[−1.5°, 1.5°]。相比于采用单根形状记忆合金丝驱动,拮抗驱动方式有利于提升位置控制精度和双向偏转能力。Abstract: Aiming at the improvement of the motion performance of the humanoid wrist, a prototype of the humanoid wrist actuated by shape memory alloy (SMA) is designed, and the position control of the wrist joint was realized by using the antagonistic driving. Based on the relevant theoretical and simulation analysis, the precision of the system model was proved by using the experiments. The effect of the antagonistic driving method on the motion performance of the system was studied by using the experiments of the motion control on the prototype. The results show that the minimum tracking error is [−0.5°, 1°] and the maximum is [−1.5°, 1.5°] for the one-way sinusoidal signals in different frequency tracking experiment with antagonistic driving method. For the sinusoidal signals, the wrist can move continuously in both directions and all of the position errors are less than [−1.5°, 1.5°] when the signal frequency is 1/15 Hz. Comparing with the single-SMA-wire drive method, the antagonistic method is beneficial to improve the position control accuracy and bidirectional deflection ability.
-
Key words:
- humanoid wrist /
- shape memory alloy (SMA) /
- antagonistic driving /
- position control
-
表 2 实验装置相关参数
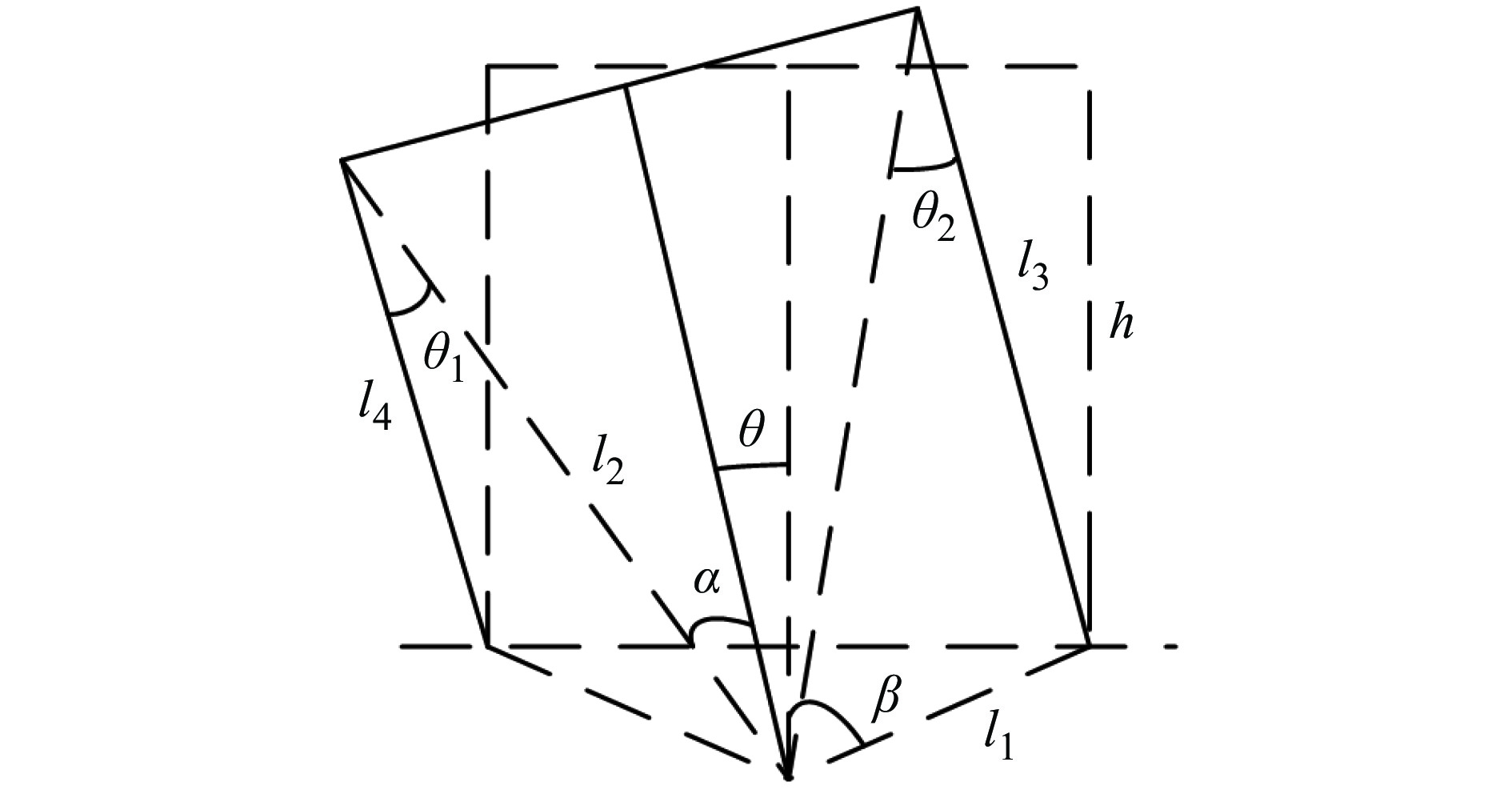
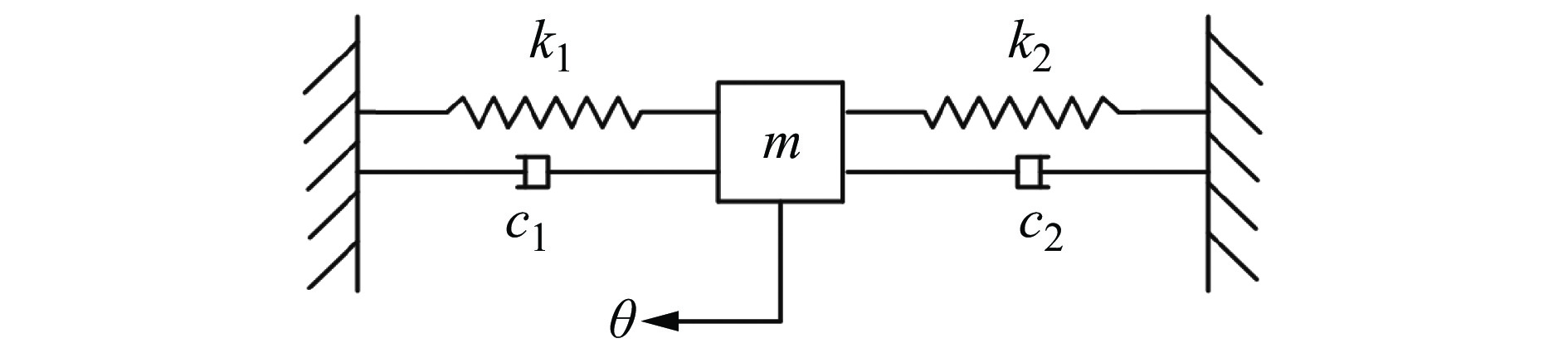
参数 数值 参数 数值 EMartensite/MPa 600 EAustenite/MPa 1073 Tamb/℃ 20 Cpressure/[J·(kg·℃)−1] 320 mwire/(kg·m−1) 1.12×10−4 h1 20 h2 0.001 Afinish/℃ 68 Astart/℃ 46 Mfinish/℃ 40 Mstart/℃ 60 CAustenite/(MPa·℃−1) 10 CMartensite/(MPa·℃−1) 10 l0/mm 500 k/(N·mm−1) 0.13 α/(°) 23 β/(°) 73.6 m/g 55 llink/mm 40 l1/mm 17.8 l2/mm 43.5 h/mm 35 J/(kg·mm−2) 29.33  下载: 导出CSV
下载: 导出CSV
-
[1] 孙英飞, 罗爱华. 我国工业机器人发展研究[J]. 科学技术与工程, 2012, 12(12): 2912-2918 + 3031 doi: 10.3969/j.issn.1671-1815.2012.12.031SUN Y F, LUO A H. Development research on China′s industrial robot[J]. Science Technology and Engineering, 2012, 12(12): 2912-2918 + 3031 (in Chinese) doi: 10.3969/j.issn.1671-1815.2012.12.031 [2] 彭艳, 刘勇敢, 杨扬, 等. 软体机械手爪在果蔬采摘中的应用研究进展[J]. 农业工程学报, 2018, 34(9): 11-20 doi: 10.11975/j.issn.1002-6819.2018.09.002PENG Y, LIU Y G, YANG Y, et al. Research progress on application of soft robotic gripper in fruit and vegetable picking[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 11-20 (in Chinese) doi: 10.11975/j.issn.1002-6819.2018.09.002 [3] 颜云辉, 徐靖, 陆志国, 等. 仿人服务机器人发展与研究现状[J]. 机器人, 2017, 39(4): 551-564 doi: 10.13973/j.cnki.robot.2017.0551YAN Y H, XU J, LU Z G, et al. Development and research status of humanoid service robots[J]. Robot, 2017, 39(4): 551-564 (in Chinese) doi: 10.13973/j.cnki.robot.2017.0551 [4] 唐华彬. 仿人机器人脚部部件的设计与仿真研究[D]. 武汉: 华中科技大学, 2017TANG H B. Design and simulation of foot parts of humanoid robot[D]. Wuhan: Huazhong University of Science and Technology, 2017 (in Chinese) [5] ELANGO N, FAUDZI A A M. A review article: investigations on soft materials for soft robot manipulations[J]. The International Journal of Advanced Manufacturing Technology, 2015, 80(5-8): 1027-1037 doi: 10.1007/s00170-015-7085-3 [6] 何睿. 气动肌肉驱动机械手臂的仿生设计与类人运动控制研究[D]. 北京: 北京工业大学, 2019HE R. Research on bionic design and human-like motion control of robotic arm driven by pneumatic artificial muscles[D]. Bejing: Bejing University of Technology, 2019 (in Chinese) [7] 范伯骞. 液压驱动下肢外骨骼机器人关键技术研究[D]. 杭州: 浙江大学, 2017FAN B Q. Research on the key technologies of the hydraulic lower limb exoskeleton robot[D]. Hangzhou: Zhejiang University, 2017 (in Chinese) [8] 教柳, 张保成, 张开升, 等. 两关节压力驱动柔性仿生机器鱼的设计与仿真[J]. 力学学报, 2020, 52(3): 817-827 doi: 10.6052/0459-1879-20-001JIAO L, ZHANG B C, ZHANG K S, et al. Design and simulation of two-joint pressure-driven soft bionic fish[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(3): 817-827 (in Chinese) doi: 10.6052/0459-1879-20-001 [9] 张忠强, 邹娇, 丁建宁, 等. 软体机器人驱动研究现状[J]. 机器人, 2018, 40(5): 648-659 doi: 10.13973/j.cnki.robot.180272ZHANG Z Q, ZOU J, DING J N, et al. Research status of the soft robot driving[J]. Robot, 2018, 40(5): 648-659 (in Chinese) doi: 10.13973/j.cnki.robot.180272 [10] ANDRIKOPOULOS G, NIKOLAKOPOULOS G, MANESIS S. Design and development of an exoskeletal wrist prototype via pneumatic artificial muscles[J]. Meccanica, 2015, 50(11): 2709-2730 doi: 10.1007/s11012-015-0199-8 [11] HOŠOVSKÝ A, PITEĽ J, ŽIDEK K, et al. Dynamic characterization and simulation of two-link soft robot arm with pneumatic muscles[J]. Mechanism and Machine Theory, 2016, 103: 98-116 doi: 10.1016/j.mechmachtheory.2016.04.013 [12] 李铁风, 李国瑞, 梁艺鸣, 等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报, 2016, 48(4): 756-766 doi: 10.6052/0459-1879-16-159LI T F, LI G R, LIANG Y M, et al. Review of materials and structures in soft robotics[J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 756-766 (in Chinese) doi: 10.6052/0459-1879-16-159 [13] HUBBARD J J, FLEMING M, PALMRE V, et al. Monolithic IPMC fins for propulsion and maneuvering in bioinspired underwater robotics[J]. IEEE Journal of Oceanic Engineering, 2014, 39(3): 540-551 doi: 10.1109/JOE.2013.2259318 [14] JI X B, LIU X C, CACUCCIOLO V, et al. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators[J]. Science Robotics, 2019, 4(37): eaaz6451 doi: 10.1126/scirobotics.aaz6451 [15] IONOV L. Hydrogel-based actuators: possibilities and limitations[J]. Materials Today, 2014, 17(10): 494-503 doi: 10.1016/j.mattod.2014.07.002 [16] LI H, GO G, KO S Y, et al. Magnetic actuated pH-responsive hydrogel-based soft micro-robot for targeted drug delivery[J]. Smart Materials and Structures, 2016, 25(2): 027001 doi: 10.1088/0964-1726/25/2/027001 [17] YIN H B, KONG C, LI J F, et al. Modeling of grasping force for a soft robotic gripper with variable stiffness[J]. Mechanism and Machine Theory, 2018, 128: 254-274 doi: 10.1016/j.mechmachtheory.2018.05.005 [18] HWANG D, HIGUCHI T. A rotary actuator using shape memory alloy (SMA) wires[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(5): 1625-1635 doi: 10.1109/TMECH.2013.2290545 [19] CHEN Y C, SHEN X, LI J F, et al. Nonlinear hysteresis identification and compensation based on the discrete Preisach model of an aircraft morphing wing device manipulated by an SMA actuator[J]. Chinese Journal of Aeronautics, 2019, 32(4): 1040-1050 doi: 10.1016/j.cja.2018.09.006 [20] SRIVASTAVA A, WARD C, PATEL R V. Adaptive neural preisach model and model predictive control of shape memory alloy actuators[C]// 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM). Munich, Germany: IEEE, 2017: 1179-1184 [21] LI R, FENG Y, HU Z D. Dynamic surface control of shape memory alloy actuating systems with inverse duhem hysteresis compensation[C]// 2018 IEEE International Conference on Mechatronics and Automation (ICMA). Changchun, China: IEEE, 2018: 1305-1310 [22] TRONG TAI N, AHN K K. Adaptive proportional-integral-derivative tuning sliding mode control for a shape memory alloy actuator[J]. Smart Materials and Structures, 2011, 20(5): 055010 doi: 10.1088/0964-1726/20/5/055010 [23] LEE J, JIN M L, AHN K K. Precise tracking control of shape memory alloy actuator systems using hyperbolic tangential sliding mode control with time delay estimation[J]. Mechatronics, 2013, 23(3): 310-317 doi: 10.1016/j.mechatronics.2013.01.005 [24] REZAUL ISLAM A B M, KARADOĞAN E. Sensitivity and uncertainty analysis of one-dimensional tanaka and liang-rogers shape memory alloy constitutive models[J]. Materials, 2019, 12(10): 1687 doi: 10.3390/ma12101687 -







 点击查看大图
点击查看大图

图(13) / 表(2)
计量
- 文章访问数: 220
- HTML全文浏览量: 126
- PDF下载量: 49
- 被引次数: 0
