




Optimal Design of a Digital Electromagnetic Actuator Array Using Genetic Algorithm
-
摘要: 为了满足四稳态数字电磁执行器阵列具有稳定、独立性及均一性的紧凑化设计需求, 提出了一种基于基因遗传算法的多目标优化设计方法。应用MATLAB建立了执行器阵列的静态磁场分析模型, 并将其用于优化阵列, 使用单目标遗传算法和多目标遗传算法分别对执行器阵列进行了优化并进行优化数据对比, 最后确定了执行器阵列的最终优化设计参数。优化结果表明: 与现有的执行器阵列相比, SRZ目标值提高了38.33%, IF目标值将低了5.78%, VF目标值降低了1.08%。Abstract: In order to satisfy the requirements for stability, independence and homogeneous design of a quad-stable digital electromagnetic actuator array, an optimization approach based on genetic algorithm has been proposed for the optimal design of the actuator array. An analytic model has been first created for static magnetic field analysis of the actuator array based on MATLAB software. Then, single-objective and multi-objective optimizations of the actuator array have been carried out respectively by using this model. The final optimal results have been analyzed and compared with the prototype design configuration. It has been observed that the three optimization objectives, namely Self-return zone, Interaction force and Vibration force, have been improved by 38.33%, 5.78% and 1.08% respectively.
-
Key words:
- digital actuator /
- quad-stable /
- genetic algorithm /
- multi-objective optimization
-
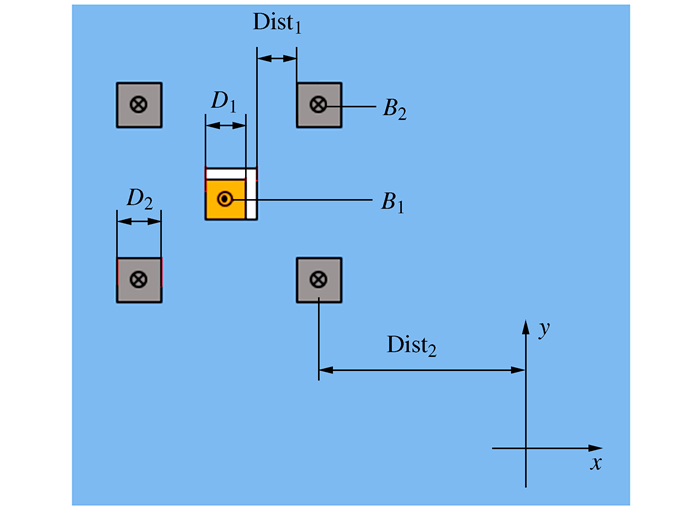
表 2 阵列的设计变量配置
设计变量及单位 含义 设定值范围 B1/T MPM的磁化强度 0.5~1.5 B2/T FPM的磁化强度 0.5~1.5 D1/mm MPM的边长 1.0~4.0 D2/mm FPM的边长 1.0~4.0 Dist1/mm MPM与FPM间距 1.0~5.0 Dist2/mm FPM中心与阵列几何中心间距离 2.0~10.0  下载: 导出CSV
下载: 导出CSV
表 3 VF单目标优化结果与原型设计参数
参数 VF优化 原型 B1/T 0.56 1.45 B2/T 1.11 1.45 D1/mm 1.13 2.00 D2/mm 2.45 2.50 Dist1/mm 4.89 3.85 Dist2/mm 8.29 4.00
下载: 导出CSV
表 4 VF单目标优化结果与原型设计目标值
类别 优化目标 SRZ/μm IF/mN VF/mN VF优化设计 0.00(-) 0.033(+) 0.001(+) 原型数组 26.30 0.174 1.758
下载: 导出CSV
表 5 IF单目标优化结果与原型设计参数
参数 IF优化 原型 B1/T 0.98 1.45 B2/T 0.78 1.45 D1/mm 1.79 2.00 D2/mm 1.09 2.50 Dist1/mm 3.19 3.85 Dist2/mm 5.75 4.00
下载: 导出CSV
表 6 IF单目标优化结果与原型设计目标值
类别 优化目标 SRZ/μm IF/mN VF/mN IF优化设计 0.00(-) 0.002(+) 0.046(+) 原型数组 26.30 0.174 1.758
下载: 导出CSV
表 7 SRZ单目标优化结果与原型设计参数
参数 IF优化 原型 B1/T 1.45 1.45 B2/T 1.49 1.45 D1/mm 1.18 2.00 D2/mm 2.44 2.50 Dist1/mm 1.01 3.85 Dist2/mm 7.49 4.00
下载: 导出CSV
表 8 SRZ单目标优化结果与原型设计目标值
类别 优化目标 SRZ/μm IF/mN VF/mN SRZ优化设计 68.1(+) 0.446(-) 0.019(+) 原型数组 26.3 0.174 1.758
下载: 导出CSV
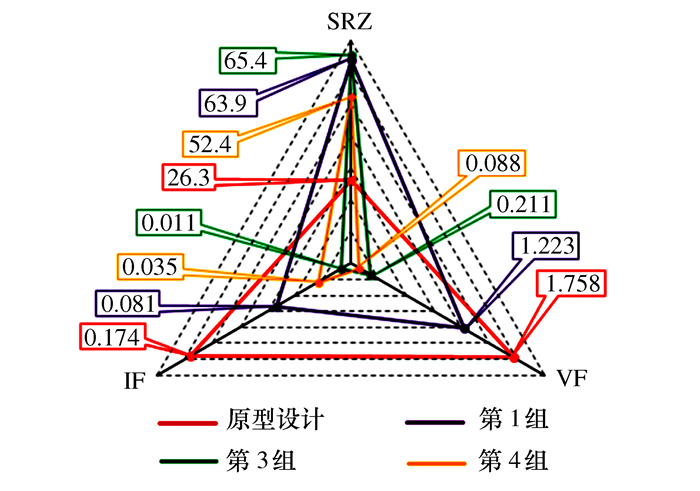
表 9 多目标优化结果
序号 优化目标 SRZ/μm IF/mN VF/mN 1 63.9 0.081 1.223 2 54.1 0.583 0.116 3 65.4 0.011 0.211 4 52.4 0.035 0.088 5 52.1 0.995 0.045 6 66.9 0.053 1.558
下载: 导出CSV
表 10 最终优化结果与原型设计参数
参数 第3组 原型 B1/T 1.20 1.45 B2/T 1.32 1.45 D1/mm 1.73 2.00 D2/mm 1.47 2.50 Dist1/mm 1.71 3.85 Dist2/mm 8.55 4.00
下载: 导出CSV
表 11 优化结果对比
% 类别 优化参数 SRZ IF VF 原型数组 38.62 11.49 0.06 多目标优化设计 76.95 5.71 1.14 SRZ优化设计 100.00 0.45 5.26 IF优化设计 0.00 100 2.17 VF优化设计 0.00 6.06 100.00
下载: 导出CSV
-
[1] CHEN G M, ATEN Q T, ZIRBEL S, et al. A tristable mechanism configuration employing orthogonal compliant mechanisms[J]. Journal of Mechansims and Robotics, 2010, 2(1): 014501 doi: 10.1115/1.4000529 [2] KANG C G, LEE J S, HAN J H. Development of bi-stable and millimeter-scale displacement actuator using snap-through effect for reciprocating control fins[J]. Aerospace Science and Technology, 2014, 32(1): 131-141 doi: 10.1016/j.ast.2013.11.007 [3] ZHAO J, GAO R J, CHEN G X, et al. Nonlinear coupling mechanical model for large stroke magnetic-based multistable mechanisms[J]. Mechanism and Machine Theory, 2015, 83: 56-68 doi: 10.1016/j.mechmachtheory.2014.09.004 [4] 刘军, 李海华, 王庆康. 微机电系统光开关的扭臂式静电驱动结构设计[J]. 上海交通大学学报, 2015, 49(11): 1675-1679 https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201511015.htmLIU J, LI H H, WANG Q K. Design and stress analysis of a torsion electrostatic micro-actuator for MEMS optical switch[J]. Journal of Shanghai Jiaotong University, 2015, 49(11): 1675-1679 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201511015.htm [5] 林义忠, 黄冰鹏, 李盛, 等. 机器人智能碰撞传感器的设计与仿真[J]. 传感器与微系统, 2017, 36(10): 70-72, 76 https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ201710021.htmLIN Y Z, HUANG B P, LI S, et al. Design and simulation of intelligent collision sensor for robot[J]. Transducer and Microsystem Technologies, 2017, 36(10): 70-72, 76 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ201710021.htm [6] CHOI W Y. Design and scaling of Nano-electro-mechanical non-volatile memory (NEMory) cells[J]. Current Applied Physics, 2010, 10(1): 311-316 doi: 10.1016/j.cap.2009.06.014 [7] 马立, 肖金涛, 周莎莎, 等. 杠杆式尺蠖压电直线驱动器[J]. 光学 精密工程, 2015, 23(1): 184-190 https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201501024.htmMA L, XIAO J T, ZHOU S S, et al. Linear lever-type piezoelectric inchworm actuator[J]. Optics and Precision Engineering, 2015, 23(1): 184-190 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201501024.htm [8] 梁尚军, 杨珂, 牛小康, 等. 变体飞机结构领域研究进展[J]. 飞机设计, 2017, 37(6): 1-5 https://www.cnki.com.cn/Article/CJFDTOTAL-FJSJ201706001.htmLIANG S J, YANG K, NIU X K, et al. Research progress on structural domain of morphing aircraft[J]. Aircraft Design, 2017, 37(6): 1-5 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-FJSJ201706001.htm [9] MATTIONI F, WEAVER P M, POTTER K D, et al. The application of thermally induced multistable composites to morphing aircraft structures[C]//Proceedings of SPIE 6930, Industrial and Commercial Applications of Smart Structures Technologies. San Diego: SPIE, 2008: 12-23 [10] 时运来, 娄成树, 张军, 等. 黏滑驱动式小型精密运动平台[J]. 光学 精密工程, 2018, 26(5): 1124-1132 https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201805013.htmSHI Y L, LOU C S, ZHANG J, et al. Small precision motion platform based on stick-slip driving principle[J]. Optics and Precision Engineering, 2018, 26(5): 1124-1132 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201805013.htm [11] 李仕华, 韩雪艳, 马琦翔, 等. 新型并联柔性铰链微动精密平台的研究[J]. 中国机械工程, 2016, 27(7): 888-893 doi: 10.3969/j.issn.1004-132X.2016.07.007Li S H, Han X Y, Ma Q X. et al. Research on novel parallel micro-motion precision platform with flexible hinge[J]. China Mechanical Engineering, 2016, 27(7): 888-893 (in Chinese) doi: 10.3969/j.issn.1004-132X.2016.07.007 [12] 杨文珍, 许艳, 吴新丽, 等. 盲文显示装置的研究进展[J]. 浙江理工大学学报, 2015, 33(5): 660-668 https://www.cnki.com.cn/Article/CJFDTOTAL-ZJSG201509016.htmYANG W Z, XU Y, WU X L, et al. Research progress of braille display device[J]. Journal of Zhejiang Sci-Tech University, 2015, 33(5): 660-668 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZJSG201509016.htm [13] MATSUNAGA T, TOTSU K, ESASHI M, et al. Tactile display using shape memory alloy micro-coil actuator and magnetic latch mechanism[J]. Displays, 2013, 34(2): 89-94 doi: 10.1016/j.displa.2013.03.001 [14] 蔡向朝, 王战玺, 孙启彰, 等. 可配置模块化工业机器人运动控制系统研究[J]. 机械科学与技术, 2018, 37(5): 760-766 doi: 10.13433/j.cnki.1003-8728.20180073CAI X C, WANG Z X, SUN Q Z, et al. Research on configurable modular motion control system of industrial robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(5): 760-766 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180073 [15] 吕泽良, 黄超雷, 陈正泉. 气动软体机器人执行器的控制与研究[J]. 装备制造技术, 2018(11): 5-8 https://www.cnki.com.cn/Article/CJFDTOTAL-GXJX201811002.htmLÜ Z L, HUANG C L, CHEN Z Q. Control and research of pneumatic software robot actuator[J]. Equipment Manufacturing Technology, 2018(11): 5-8 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GXJX201811002.htm [16] PANDE S S, DIXIT U S. Precision product-process design and optimization[M]. Singapore: Springer, 2018: 73-97 [17] 单宝英, 郭萍, 张帆, 等. 基于遗传算法与方案优选的多目标优化模型求解方法[J]. 中国农业大学学报, 2019, 24(6): 157-165 https://www.cnki.com.cn/Article/CJFDTOTAL-NYDX201906019.htmSHAN B Y, GUO P, ZHANG F, et al. A multi-objective optimization model solving method based on genetic algorithm and scheme evaluation[J]. Journal of China Agricultural University, 2019, 24(6): 157-165 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYDX201906019.htm [18] XIAO S L, LI Y M. Optimal design, fabrication, and control of an XY micropositioning stage driven by electromagnetic actuators[J]. IEEE Transactions on Industrial Electronics, 2013, 60(10): 4613-4626 http://pdfs.semanticscholar.org/45e4/fb62a1d498b628530224e7110db941803699.pdf [19] CHA Y G, AGRAWAL A K, KIM Y, et al. Multi-objective genetic algorithms for cost-effective distributions of actuators and sensors in large structures[J]. Expert Systems with Applications, 2012, 39(9): 7822-7833 http://www.onacademic.com/detail/journal_1000035045292510_c965.html [20] ZHANG D, GAO Z, FASSI I. Design optimization of a spatial hybrid mechanism for micromanipulation[J]. International Journal of Mechanics and Materials in Design, 2011, 7(1): 55-70 http://www.onacademic.com/detail/journal_1000034519188410_40c4.html [21] 肖红军. 平面完全约束绳牵引并联机器人的多目标优化[J]. 西安工程大学学报, 2010, 24(5): 608-613, 622 https://www.cnki.com.cn/Article/CJFDTOTAL-XBFZ201005010.htmXIAO H J. The multi-object optimization of planar completely restrained wire-driven parallel manipulator[J]. Journal of Xi'an Polytechnic University, 2010, 24(5): 608-613, 622 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XBFZ201005010.htm [22] 呼延鹏飞, 代海风, 胥光申. 一种四稳态数字电磁执行器阵列设计及磁场模拟分析[J]. 机械科学与技术, 2020, 39(4): 508-515 doi: 10.13433/j.cnki.1003-8728.20190186HUYAN P F, DAI H F, XU G S. Design and simulation analysis of magnetic field of a four-stable state digital electromagnetic actuator array[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(4): 508-515 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190186 [23] HUYAN P F. Réseau d'actionneurs electromagnetiques numerique: caractérisation d'une application de type convoyage et conception optimisee[D]. Compiègne: Unversité de Technologie de Compiègne, 2015 [24] PETIT L. Contribution aux techniques d'actionnement numérique cas d'un système électromagnétique 2D[D]. Compiègne: Unversité de Technologie de Compiègne, 2009 -





 点击查看大图
点击查看大图
图(11) / 表(11)
计量
- 文章访问数: 134
- HTML全文浏览量: 20
- PDF下载量: 14
- 被引次数: 0
