




Passive Compliance Analysis of Cable-driven Snake-arm Robots
-
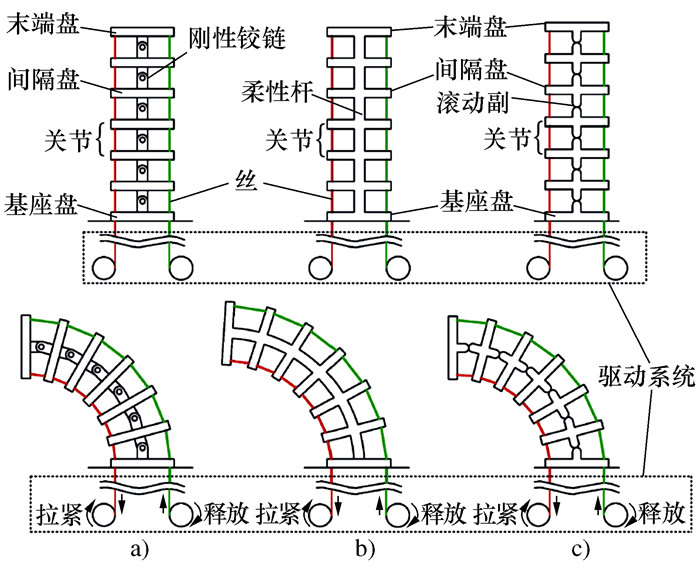
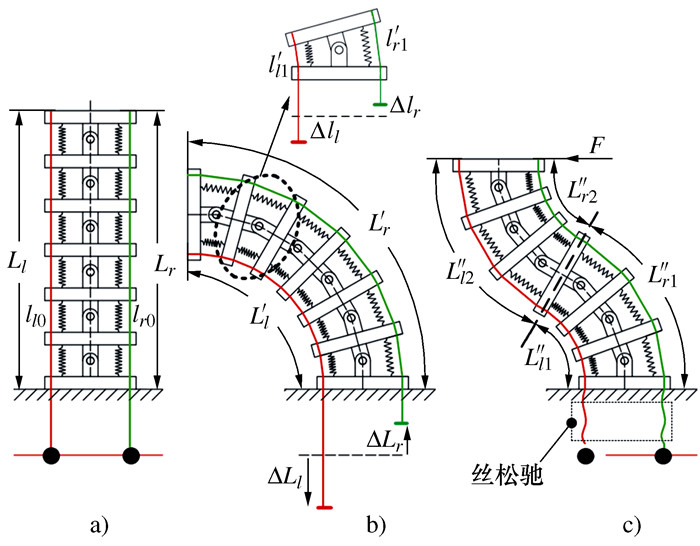
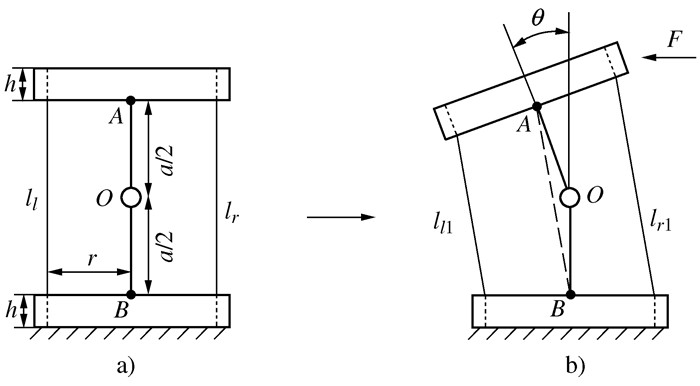
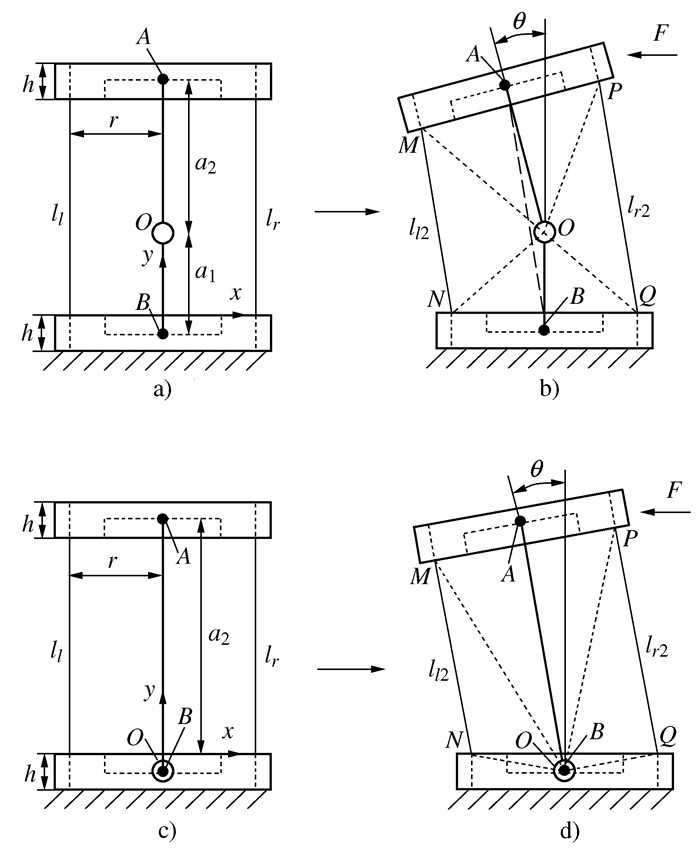
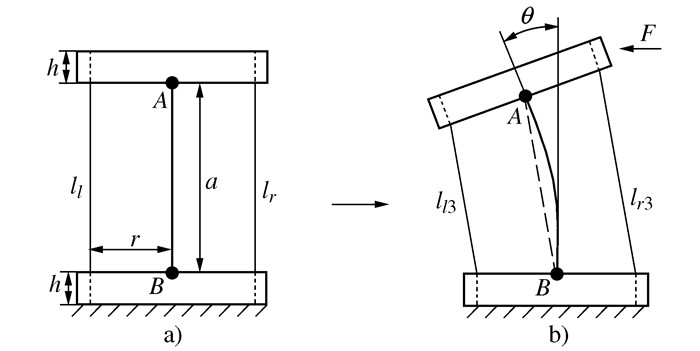
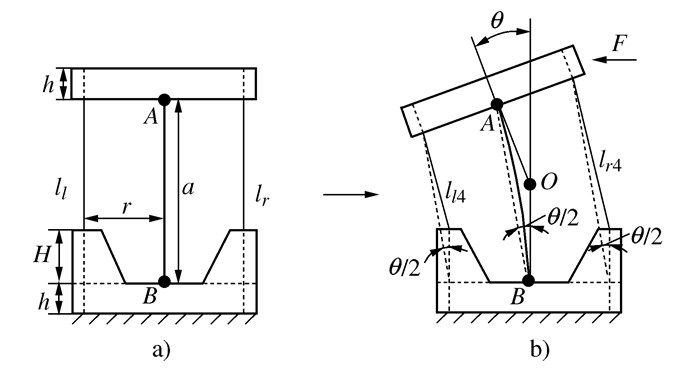
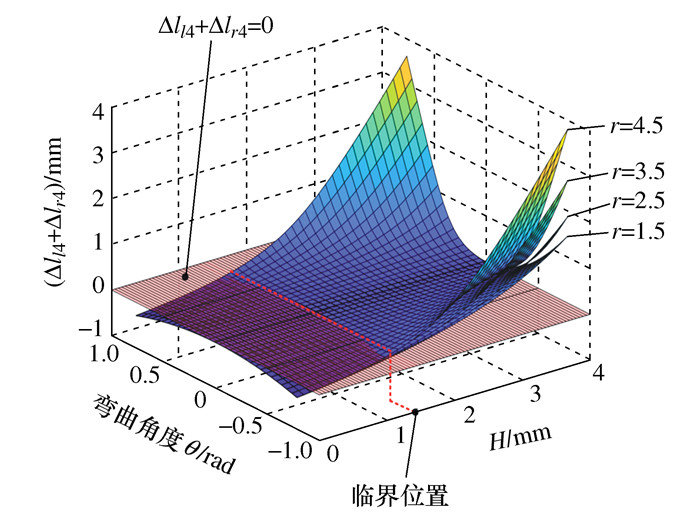
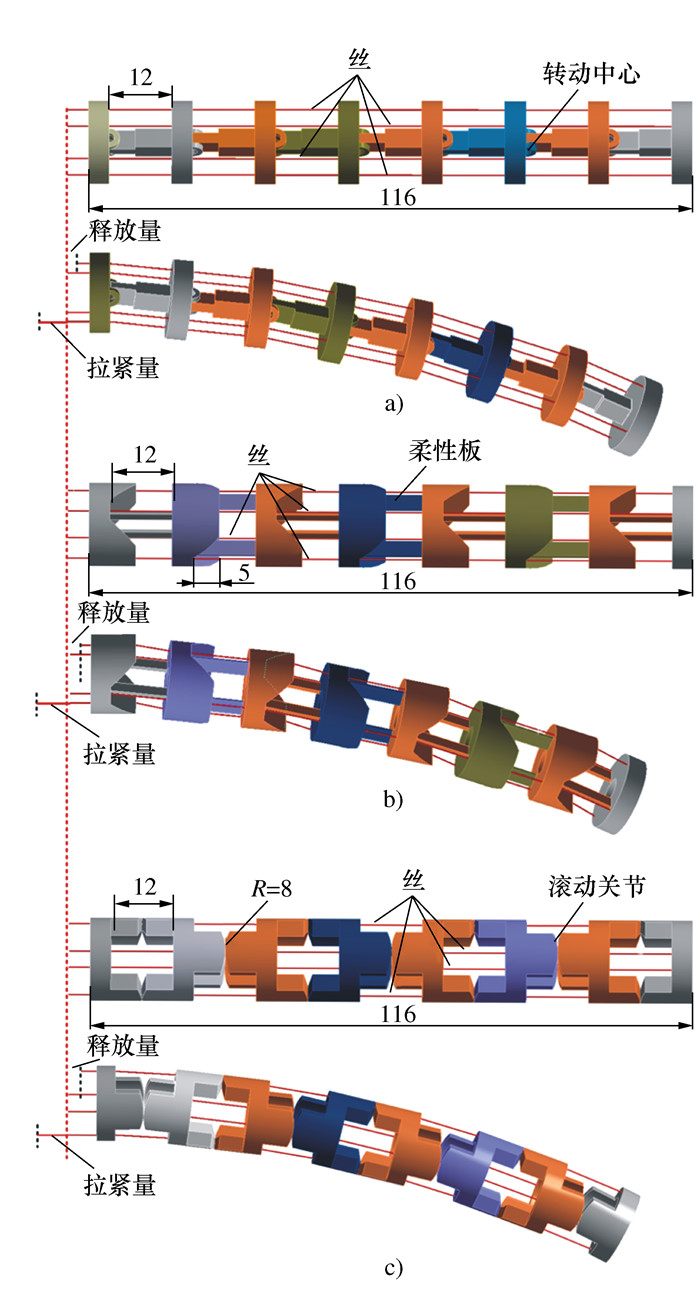
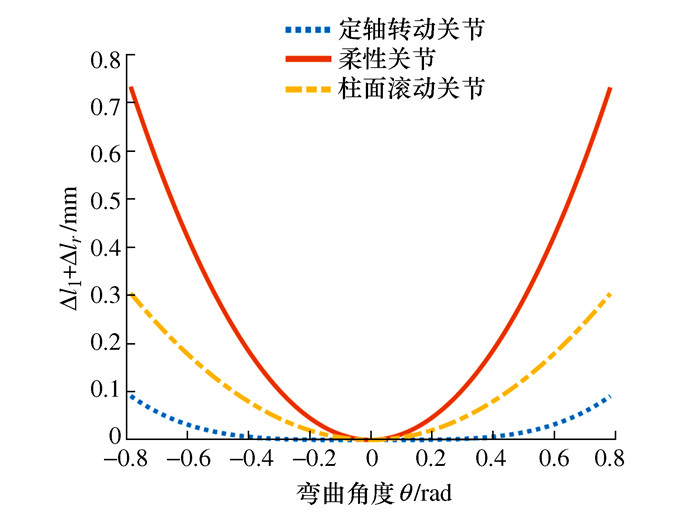
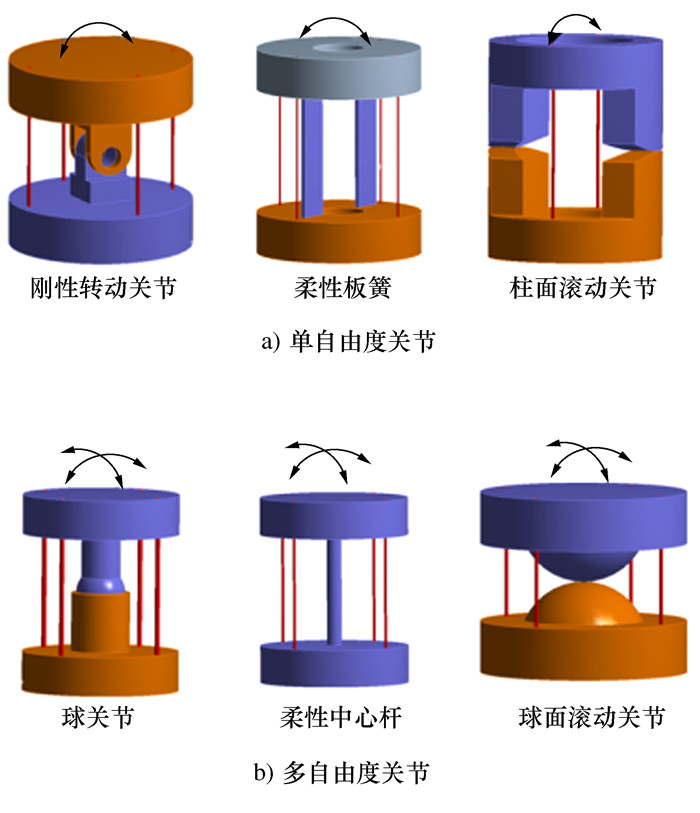
摘要: 常见的丝驱动蛇形臂机器人在末端受到外部横向力作用时易发生丝松弛现象,导致丝驱动蛇形臂机器人的构型不可控,这种特性即为被动柔顺特性。为解决被动柔顺问题,首先总结并分析了典型丝驱动蛇形臂机器人关节类型及其结构特点。其次以一种含有典型关节的丝驱动蛇形臂机器人为例,详细分析被动柔顺特性的产生机理,进而提出一种被动柔顺指标。通过研究丝驱动蛇形臂机器人的关节结构参数对被动柔顺指标的具体影响,得到了可避免被动柔顺特性的关节参数设计要求。在此基础上,建立3种不具有被动柔顺特性的丝驱动蛇形臂机器人构节。Abstract: The common cable-driven snake-arm robot is prone to loosening when the distal end is subjected to external lateral force, which may lead to an uncontrollable configuration. This phenomenon is referred to as passive compliance. To avoid the phenomenon, the joint configurations in cable-driven snake-arm robots and the structural characteristics of typical cable-driven snake-arm robots were firstly summarized and analyzed in this paper. Then, the passive compliance was discussed with the example of the snake-arm robot with pivot-based joints. Furthermore, a passive compliance index was proposed to analyze the influence of the joint parameters on passive compliance. As a result, the joint parameter design requirements which can avoid passive compliance are obtained. Finally, three different cable-driven snake-arm robots without passive compliance are established.
-
Key words:
- cable-driven /
- snake-arm robot /
- passive compliance /
- joint configuration /
- joint parameter design
-
[1] DONG X, PALMER D, AXINTE D, et al. In-situ repair/maintenance with a continuum robotic machine tool in confined space[J]. Journal of Manufacturing Processes, 2019, 38: 313-318 doi: 10.1016/j.jmapro.2019.01.024 [2] WOLF A, BROWN H B, CASCIOLA R, et al. A mobile hyper redundant mechanism for search and rescue tasks[C]//Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2003: 2889-2895 [3] 苏中, 张双彪, 李兴城. 蛇形机器人的研究与发展综述[J]. 中国机械工程, 2015, 26(3): 414-425 doi: 10.3969/j.issn.1004-132X.2015.03.022SU Z, ZHANG S B, LI X C. Present situation and development tendency of snake-like robots[J]. China Mechanical Engineering, 2015, 26(3): 414-425 (in Chinese) doi: 10.3969/j.issn.1004-132X.2015.03.022 [4] XU K, ZHAO J R, ZHENG X D, et al. Configuration comparison among kinematically optimized continuum manipulators for robotic surgeries through a single access port[J]. Robotica, 2015, 33(10): 2025-2044 doi: 10.1017/S0263574714000976 [5] LI Z, DU R. Design and analysis of a bio-inspired wire-driven multi-section flexible robot[J]. International Journal of Advanced Robotic Systems, 2013, 10(4): 209 doi: 10.5772/56025 [6] LI Z, YU H Y, REN H L, et al. A novel constrained tendon-driven serpentine manipulator[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015: 5966-5971 [7] SHEN T, WARBURTON K, POURGHODRAT A, et al. A novel articulated drive mechanism for multifunctional NOTES robot[J]. Journal of Medical Devices, 2014, 8(3): 030921 doi: 10.1115/1.4027042 [8] 熊志林, 陶建峰, 刘成良. 改进末端跟随运动的超冗余蛇形臂机器人运动学逆解[J]. 机器人, 2018, 40(1): 37-45 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201801005.htmXIONG Z L, TAO J F, LIU C L. Inverse kinematics of hyper-redundant snake-arm robots with improved tip following movement[J]. Robot, 2018, 40(1): 37-45 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201801005.htm [9] 杨文龙, 杜志江, 董为. 一种具有切口结构的连续体机械臂的力学建模[J]. 机器人, 2015, 37(5): 566-572 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201505007.htmYANG W L, DU Z J, DONG W. Mechanics modeling of a notched continuum manipulator[J]. Robot, 2015, 37(5): 566-572 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201505007.htm [10] 王海, 付邦晨, 薛彬, 等. 六自由度柔性关节机械臂的动力学分析[J]. 中国机械工程, 2016, 27(8): 1096-1101 doi: 10.3969/j.issn.1004-132X.2016.08.018WANG H, FU B C, XUE B, et al. Dynamics analysis of 6 DOF manipulators with flexible joints[J]. China Mechanical Engineering, 2016, 27(8): 1096-1101 (in Chinese) doi: 10.3969/j.issn.1004-132X.2016.08.018 [11] YOON H S, YI B J. A 4-DOF flexible continuum robot using a spring backbone[C]//Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation. Changchun, China: IEEE, 2009: 1249-1254 [12] YOON H S, JEONG J H, YI B J. Image-guided dual master-slave robotic system for Maxillary sinus surgery[J]. IEEE Transactions on Robotics, 2018, 34(4): 1098-1111 doi: 10.1109/TRO.2018.2830334 [13] KIM Y J, CHENG S B, KIM S, et al. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery[J]. IEEE Transactions on Robotics, 2014, 30(2): 382-395 doi: 10.1109/TRO.2013.2287975 [14] ZHANG L N, WANG S X, LI J M, et al. A novel reconfigurable unit for high dexterous surgical instrument[M]// DAI J S, ZOPPI M, KONG X W. Advances in Reconfigurable Mechanisms and Robots I. London: Springer, 2012: 433-442 [15] DONG X, RAFFLES M, GUZMAN S C, et al. Design and analysis of a family of snake arm robots connected by compliant joints[J]. Mechanism and Machine Theory, 2014, 77: 73-91 doi: 10.1016/j.mechmachtheory.2014.01.017 [16] DONG X, RAFFLES M, COBOS-GUZMAN S, et al. A novel continuum robot using twin-pivot compliant joints: design, modeling, and validation[J]. Journal of Mechanisms and Robotics, 2016, 8(2): 021010 doi: 10.1115/1.4031340 [17] SUH J W, KIM K Y. Design of a discrete bending joint using multiple unit PREF joints for isotropic 2-DOF motion[J]. International Journal of Control, Automation and Systems, 2017, 15(1): 64-72 doi: 10.1007/s12555-016-0474-z [18] SUH J W, KIM K Y, JEONG J W, et al. Design considerations for a hyper-redundant pulleyless rolling joint with elastic fixtures[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2841-2852 doi: 10.1109/TMECH.2015.2389228 [19] 徐凯, 刘欢. 多杆连续体机构: 构型与应用[J]. 机械工程学报, 2018, 54(13): 25-33 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201813003.htmXU K, LIU H. Multi-backbone continuum mechanisms: forms and applications[J]. Journal of Mechanical Engineering, 2018, 54(13): 25-33 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201813003.htm [20] WEBSTER Ⅲ R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: a review[J]. The International Journal of Robotics Research, 2010, 29(13): 1661-1683 doi: 10.1177/0278364910368147 [21] NEPPALLI S, JONES B A. Design, construction, and analysis of a continuum robot[C]//Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE, 2007: 1503-1507 -

 下载:
下载:



 点击查看大图
点击查看大图
图(13)
计量
- 文章访问数: 238
- HTML全文浏览量: 112
- PDF下载量: 30
- 被引次数: 0
