




Analysis on Kinematic Performance and Dexterity of 2-SPR/RCU Asymmetric Parallel Mechanism
-
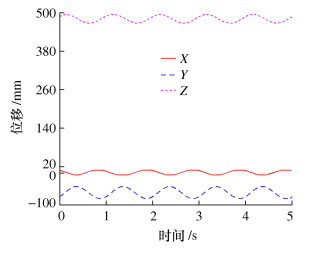
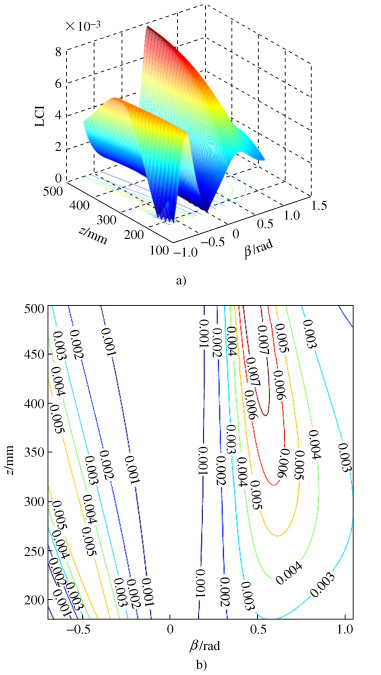
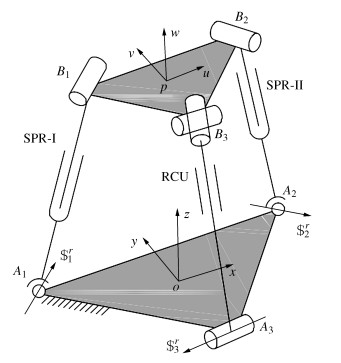
摘要: 对一种自由度为2R1T的新型非对称并联机构2-SPR/RCU进行性能分析,判断其能否应用于医疗康复领域。首先采用闭环矢量法算出该机构的运动学反解,并利用粒子群算法验证了结果的正确性;接着利用一阶影响系数法求出其速度关系式及速度雅可比矩阵,并应用ADAMS软件进行了运动性能仿真分析,其仿真出的位移、速度、加速度变化曲线光滑平稳;最后以局部条件数LCI为评价指标对灵巧度进行了分析,得到了该机构关于局部条件数LCI的灵巧度性能图谱。结果表明,该机构的运动性能与传递性能优良,在精度要求高、位置累计误差要求小的医疗康复领域具有一定的应用前景,具体为一种人体颈椎康复机构。Abstract: The performance analysis of a new asymmetric parallel mechanism 2-SPR/RCU with 2R1T degrees of freedom is carried out to determine whether it can be applied to the field of medical rehabilitation. Firstly, the closed-loop vector method is used to calculate the kinematics inverse solution of the mechanism, and the particle swarm optimization algorithm is used to verify the correctness of the results. Then, the first-order influence coefficient method is used to obtain the velocity relation and the velocity Jacobian matrix, and the ADAMS software is used to perform the simulation analysis of kinematic performance, and the simulated displacement, velocity, acceleration change curves are smooth and stable. Finally, the dexterity is analyzed with the local condition number LCI as the evaluation index, and the dexterity performance map of the organization on the local condition number LCI is obtained. The results show that the asymmetric parallel mechanism has excellent motion performance and transmission performance, and has certain application prospects in the field of medical rehabilitation with high accuracy requirements and small cumulative position errors, and the specific application is a human cervical vertebra rehabilitation mechanism.
-
表 1 反解数值算例
杆 q1/mm q2/mm q3/mm 1 408.534 0 408.534 0 408.534 0 2 447.699 0 447.861 3 447.493 3 3 459.738 4 459.738 4 422.546 5 4 500.011 4 499.955 0 462.098 4 5 562.751 4 563.568 2 486.327 9  下载: 导出CSV
下载: 导出CSV
表 2 正解数值算例
位姿 α/rad β/rad z/mm 1 0.000 87 0.001 33 379.641 9 2 0.004 19 0.084 07 419.750 1 3 0.084 53 0.006 33 419.848 4 4 0.086 35 0.089 44 460.166 4 5 0.174 75 0.173 42 500.246 3
下载: 导出CSV
-
[1] 李秦川, 柴馨雪, 陈巧红. 两转一移三自由度并联机构研究进展[J]. 科学通报, 2017, 62(14): 1507-1519 https://www.cnki.com.cn/Article/CJFDTOTAL-KXTB201714010.htmLI Q C, CHAI X X, CHEN Q H. Review on 2R1T 3-DOF parallel mechanisms[J]. Chinese Science Bulletin, 2017, 62(14): 1507-1519 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KXTB201714010.htm [2] 李博超, 项忠霞, 刘传耙, 等. 肘关节康复机器人机构设计及其运动学分析[J]. 机械科学与技术, 2020, 39(9): 1313-1322 doi: 10.13433/j.cnki.1003-8728.20190293LI B C, XIANG Z X, LIU C B, et al. Mechanism design and kinematics analysis of elbow joint rehabilitation robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(9): 1313-1322 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190293 [3] 樊晓琴, 李瑞琴, 李庠, 等. (2-SPS+PU)&R混联式踝关节康复机器人及运动学性能分析[J]. 机械科学与技术, 2019, 38(7): 1035-1040 doi: 10.13433/j.cnki.1003-8728.2019.20180277FAN X Q, LI R Q, LI X, et al. (2-SPS+PU)&R hybrid ankle joint rehabilitation robot and kinematic performance analysis[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(7): 1035-1040 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2019.20180277 [4] 吴存存, 杨桂林, 陈庆盈, 等. 四自由度2PPPaR并联机构运动学及性能分析[J]. 机械工程学报, 2018, 54(3): 36-45 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201803006.htmWU C C, YANG G L, CHEN Q Y, et al. Kinematic and performance analysis of a 4-DOF 2PPPaR parallel manipulator[J]. Journal of Mechanical Engineering, 2018, 54(3): 36-45 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201803006.htm [5] 翟亚普, 杨彦东, 董罡, 等. 3-PSU&S并联机构的运动学分析与优化设计[J]. 机械设计, 2017, 34(8): 19-25ZHAI Y P, YANG Y D, DONG G, et al. Kinematic analysis and optimal design of 3-PSU&S parallel mechanism[J]. Mechanical Design, 2017, 34(8): 19-25 (in Chinese) [6] SALISBURY J K, CRAIG J J. Articulated hands: force control and kinematic issues[J]. The International Journal of Robotics Research, 1982, 1(1): 4-17 doi: 10.1177/027836498200100102 [7] RUSSO M, HERRERO S, ALTUZARRA O, et al. Kinematic analysis and multi-objective optimization of a 3-UPR parallel mechanism for a robotic leg[J]. Mechanism and Machine Theory, 2018, 120: 192-202 doi: 10.1016/j.mechmachtheory.2017.10.004 [8] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2014HUANG Z, ZHAO Y S, ZHAO T S. Advanced spatial mechanism[M]. Beijing: Higher Education Press, 2014 (in Chinese) [9] 沈惠平, 周金波, 尤晶晶, 等. 具有解析式位置正解的2T1R并联机构运动性能分析[J]. 农业机械学报, 2020, 51(1): 398-409 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX202001044.htmSHEN H P, ZHOU J B, YOU J J, et al. 2T1R parallel mechanism with analytic positive position solutions and its kinematic performance based optimization[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(1): 398-409 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX202001044.htm [10] 胡映光, 胡明, 刘军红. 基于混合遗传算法的3-RPS并联机构正解[J]. 组合机床与自动化加工技术, 2017, 1(6): 34-36 https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC201706009.htmHU Y G, HU M, LIU J H. Forward kinematic for 3-RPS parallel mechanism based on hybrid genetic algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017, 1(6): 34-36 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC201706009.htm [11] 郭旺旺. 人体肘、膝、踝关节康复机构的可重构设计与康复效果分析[D]. 太原: 中北大学, 2019GUO W W. Reconfigurable design and rehabilitation effect analysis of human elbow, knee and ankle rehabilitation mechanism[D]. Taiyuan: North University of China, 2019 (in Chinese) [12] POND G, CARRETERO J A. Formulating jacobian matrices for the dexterity analysis of parallel manipulators[J]. Mechanism and Machine Theory, 2006, 41(12): 1505-1519 doi: 10.1016/j.mechmachtheory.2006.01.003 [13] 路光达, 张秋月, 安宁, 等. 基于ADAMS的手康复机器人运动学仿真分析[J]. 机械设计, 2020, 37(6): 87-90 doi: 10.3969/j.issn.1001-3997.2020.06.022LU G D, ZHANG Q Y, AN N, et al. Simulation analysis on kinematics of the finger-rehabilitation robot based on ADAMS[J]. Journal of Machine Design, 2020, 37(6): 87-90 (in Chinese) doi: 10.3969/j.issn.1001-3997.2020.06.022 [14] 李启腾. 一种新型含子闭环并联机构的运动学分析及灵巧性研究[D]. 天津: 河北工业大学, 2018LI Q T. The kinematic analysis and the dexterity research of a novel parallel mechanism with sub closed-chains[D]. Tianjin: Hebei University of Technology, 2018 (in Chinese) [15] LI W, ANGELES J. Full-mobility 3-CCC parallel-kinematics machines: forward kinematics, singularity, workspace and dexterity analyses[J]. Mechanism and Machine Theory, 2018, 126(1): 312-328 http://www.sciencedirect.com/science?_ob=ShoppingCartURL&_method=add&_eid=1-s2.0-S0094114X1731813X&originContentFamily=serial&_origin=article&_ts=1526255184&md5=27f788dd8e8bbd45c8fd8fb13ee1bb90 -




 点击查看大图
点击查看大图
图(10) / 表(2)
计量
- 文章访问数: 285
- HTML全文浏览量: 109
- PDF下载量: 40
- 被引次数: 0
