




Research on Multi-robot Environment Exploration using POMDP
-
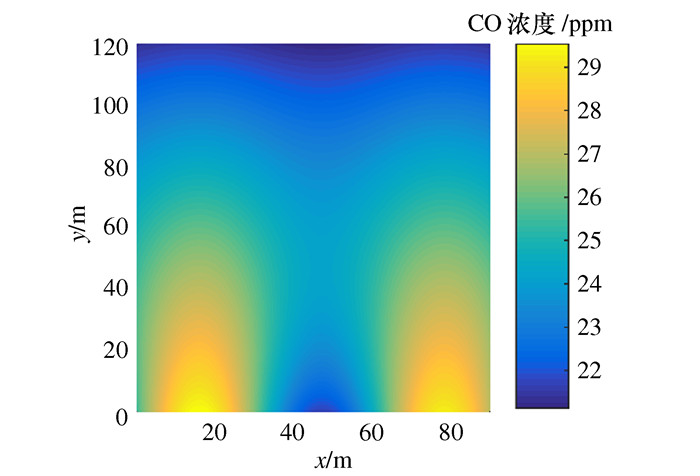
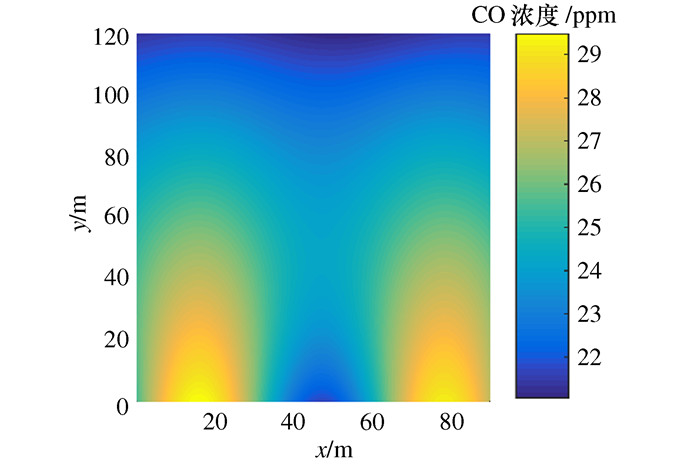
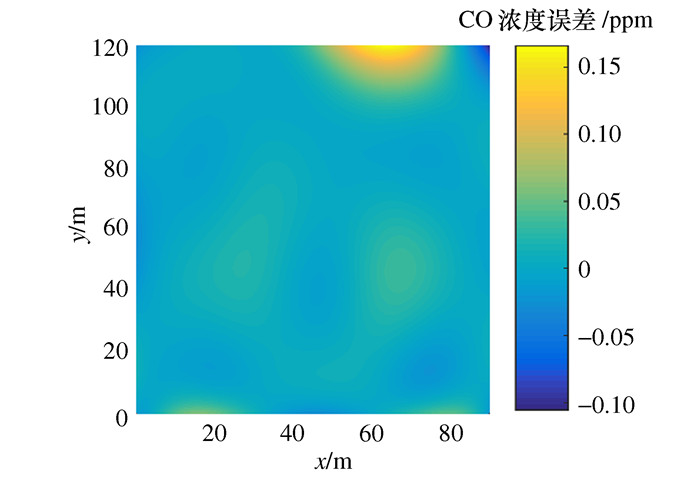
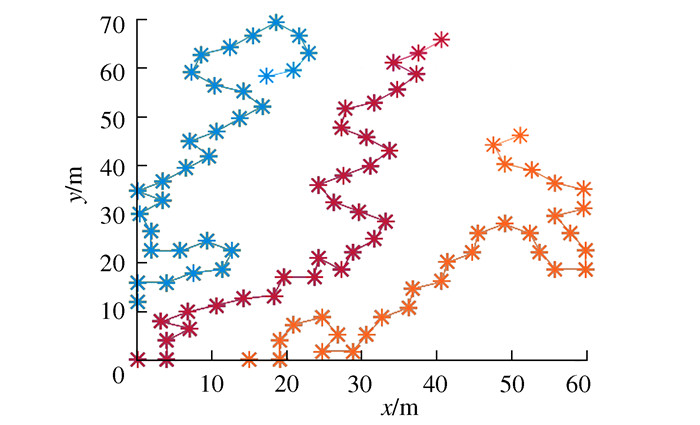
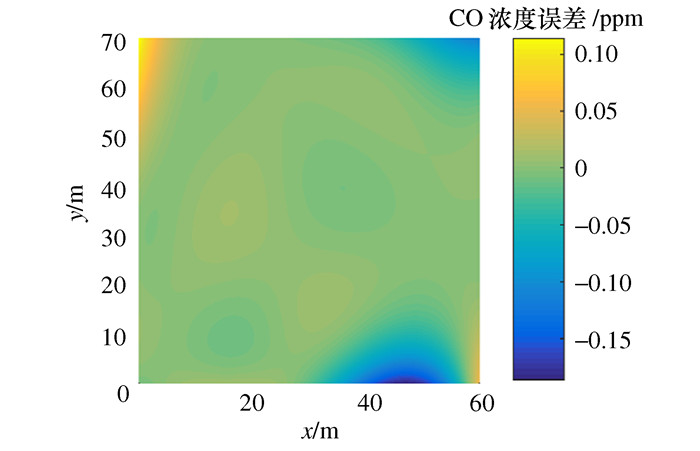
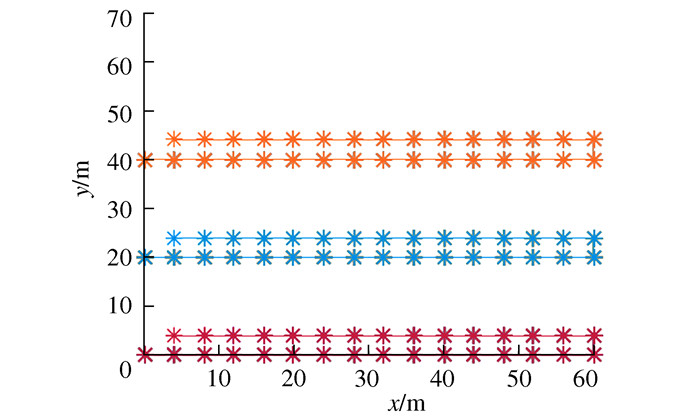
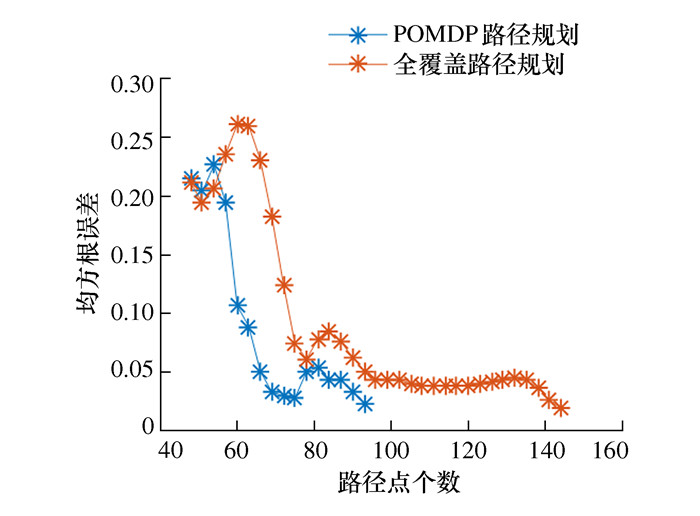
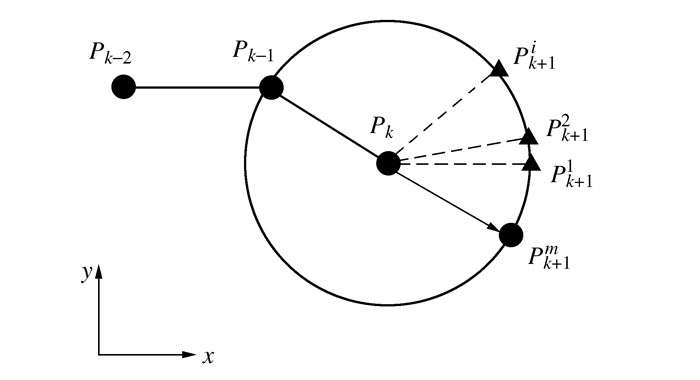
摘要: 为了提高多机器人环境探测的效率和精度,本文提供了一种基于部分可观马尔可夫决策过程(Partially observable markov decision process, POMDP)的路径规划方法来控制多个装有传感器的机器人实现对环境的协同探测。建立了多机器人环境探测系统的POMDP模型,以信息熵作为回报函数,令机器人沿着信息熵最大的方向不断移动。机器人对环境的信念采用非参数的、基于样本的表示,并用贝叶斯滤波来更新机器人对环境的信念。在仿真试验中,对两种环境的CO浓度进行了探测,都得到了精确的测量结果。与传统的全覆盖路径规划的方法相比,该方法在效率和精度上都具有优势。Abstract: To improve the efficiency and accuracy for exploring a multi-robot environment, this paper proposes a path planning method based on the partially observable Markov decision process (POMDP) to control multiple robots equipped with sensors and to realize the coordinated exploration of the environment. Taken information entropy as the return function, the multi-robot environment exploration system based on the POMDP is established to move the robots with the largest information gain in the direction. The robot′s belief in the environment uses a non-parametric, sample-based representation, and the Bayesian filtering is used to update the robot′s belief in the environment. With our simulation software, the CO concentration of the two environments was precepted. The exploration results are in a good agreement with the predesigned environment. Compared with the traditional full coverage path planning method, the system proposed in this paper has advantages in both efficiency and accuracy.
-
[1] 孙凤池, 苑晶, 黄亚楼, 等. 一种用于未知环境探索的可动态配置路标系统[J]. 机器人, 2010, 32(1): 77-82 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201001012.htmSUN F C, YUAN J, HUANG Y L, et al. A dynamically configurable landmark system for unknown environment exploration[J]. Robot, 2010, 32(1): 77-82 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201001012.htm [2] 于宁波, 王石荣, 徐昌. 一种基于RGB-D的移动机器人未知室内环境自主探索与地图构建方法[J]. 机器人, 2017, 39(6): 860-871 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201706012.htmYU N B, WANG S R, XU C. RGB-D based autonomous exploration and mapping of a mobile robot in unknown indoor environment[J]. Robot, 2017, 39(6): 860-871 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201706012.htm [3] 晁永生, 孙文磊. 动态修改路径的多机器人路径规划[J]. 机械科学与技术, 2018, 37(10): 1483-1488 doi: 10.13433/j.cnki.1003-8728.20180055CHAO Y S, SUN W L. Dynamic path modification for multi-robot path planning[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(10): 1483-1488 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180055 [4] YUAN J, HUANG Y L, TAO T, et al. A cooperative approach for multi-robot area exploration[C]//Proceedings of 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, China: IEEE, 2010: 1390-1395 [5] 葛媛媛, 张宏基, 唐虹. 粒子群优化算法融合行为动力学的路径规划方法研究[J]. 机械科学与技术, 2018, 37(2): 244-249 doi: 10.13433/j.cnki.1003-8728.20180055GE Y Y, ZHANG H J, TANG H. Research on path planning method of particle swarm optimization algorithm and fusion behavior dynamics[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(2): 244-249 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180055 [6] ISERN-GONZÁLEZ J, HERNÁNDEZ-SOSA D, FERNÁNDEZ-PERDOMO E, et al. Path planning for underwater gliders using iterative optimization[C]//Proceedings of 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 1538-1543 [7] 王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202003010.htmWANG H B, YIN P H, ZHENG W, et al. Mobile robot path planning based on improved A* algorithm and dynamic window method[J]. Robot, 2020, 42(3): 346-353 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202003010.htm [8] 赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201806016.htmZHAO X, WANG Z, HUANG C K, et al. Mobile robot path planning based on an improved A* algorithm[J]. Robot, 2018, 40(6): 903-910 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201806016.htm [9] 段勇, 王宇, 喻祥尤. 基于免疫遗传算法的多机器人环境探索[J]. 沈阳工业大学学报, 2018, 40(3): 299-303 https://www.cnki.com.cn/Article/CJFDTOTAL-SYGY201803011.htmDUAN Y, WANG Y, YU X Y. Multi-robot environment exploration based on immune genetic algorithm[J]. Journal of Shenyang University of Technology, 2018, 40(3): 299-303 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SYGY201803011.htm [10] NAZARAHARI M, KHANMIRZA E, DOOSTIE S. Multi-objective multi-robot path planning in continuous environment using an enhanced Genetic Algorithm[J]. Expert Systems with Applications, 2019, 115: 106-120 doi: 10.1016/j.eswa.2018.08.008 [11] 程志, 张志安, 李金芝, 等. 改进人工势场法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(23): 29-34 doi: 10.3778/j.issn.1002-8331.1904-0472CHENG Z, ZHANG Z A, LI J Z, et al. Mobile robots path planning based on improved artificial potential field[J]. Computer Engineering and Applications, 2019, 55(23): 29-34 (in Chinese) doi: 10.3778/j.issn.1002-8331.1904-0472 [12] 胡小平, 曹敬. 一种多机器人的改进势场路径规划算法[J]. 机械科学与技术, 2018, 37(8): 1207-1216 doi: 10.13433/j.cnki.1003-8728.20180009HU X P, CAO J. An improved potential field path planning algorithm for multiple robots[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(8): 1207-1216 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180009 [13] LOLLA T, LERMUSIAUX P F J, UECKERMANN M P, et al. Time-optimal path planning in dynamic flows using level set equations: theory and schemes[J]. Ocean Dynamics, 2014, 64(10): 1373-1397 doi: 10.1007/s10236-014-0757-y [14] ZHANG L W, LIN Z B, WANG J, et al. Rapidly-exploring Random Trees multi-robot map exploration under optimization framework[J]. Robotics and Autonomous Systems, 2020, 131: 103565 doi: 10.1016/j.robot.2020.103565 [15] 吕伟新, 赵立军, 王珂, 等. 基于边界约束RRT的未知环境探索方法[J]. 华中科技大学学报(自然科学版), 2011, 39(S2): 366-369 https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2011S2098.htmLYU W X, ZHAO L J, WANG K, et al. Efficient exploration of unknown environments with RRT-boundary constraints[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2011, 39(S2): 366-369 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2011S2098.htm [16] 蔡标, 戴学丰, 姜来浩. 基于蚁群算法的多机器人环境探索[J]. 齐齐哈尔大学学报, 2014, 30(6): 10-13 doi: 10.3969/j.issn.1007-984X.2014.06.003CAI B, DAI X F, JIANG L H. Environment exploration of multi-robots based on ant colony algorithm[J]. Journal of Qiqihar University, 2014, 30(6): 10-13 (in Chinese) doi: 10.3969/j.issn.1007-984X.2014.06.003 [17] DAS P K, JENA P K. Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary operators[J]. Applied Soft Computing, 2020, 92: 106312 doi: 10.1016/j.asoc.2020.106312 [18] 刘晶, 姚维, 章玮. 移动机器人全覆盖路径规划算法研究[J]. 工业控制计算机, 2019, 32(12): 52-54 doi: 10.3969/j.issn.1001-182X.2019.12.019LIU J, YAO W, ZHANG W. Research on complete coverage path planning algorithm of mobile robots[J]. Industrial Control Computer, 2019, 32(12): 52-54 (in Chinese) doi: 10.3969/j.issn.1001-182X.2019.12.019 [19] 李楷, 陈永府, 金志勇, 等. 基于回溯法的全覆盖路径规划算法[J]. 计算机工程与科学, 2019, 41(7): 1227-1235 doi: 10.3969/j.issn.1007-130X.2019.07.012LI K, CHEN Y F, JIN Z Y, et al. A full coverage path planning algorithm based on backtracking method[J]. Computer Engineering & Science, 2019, 41(7): 1227-1235 (in Chinese) doi: 10.3969/j.issn.1007-130X.2019.07.012 -

 下载:
下载:





 点击查看大图
点击查看大图
图(13)
计量
- 文章访问数: 215
- HTML全文浏览量: 160
- PDF下载量: 23
- 被引次数: 0
