




Complex Kinematics Simulation and Measurement of Foot and Ankle Joint
-
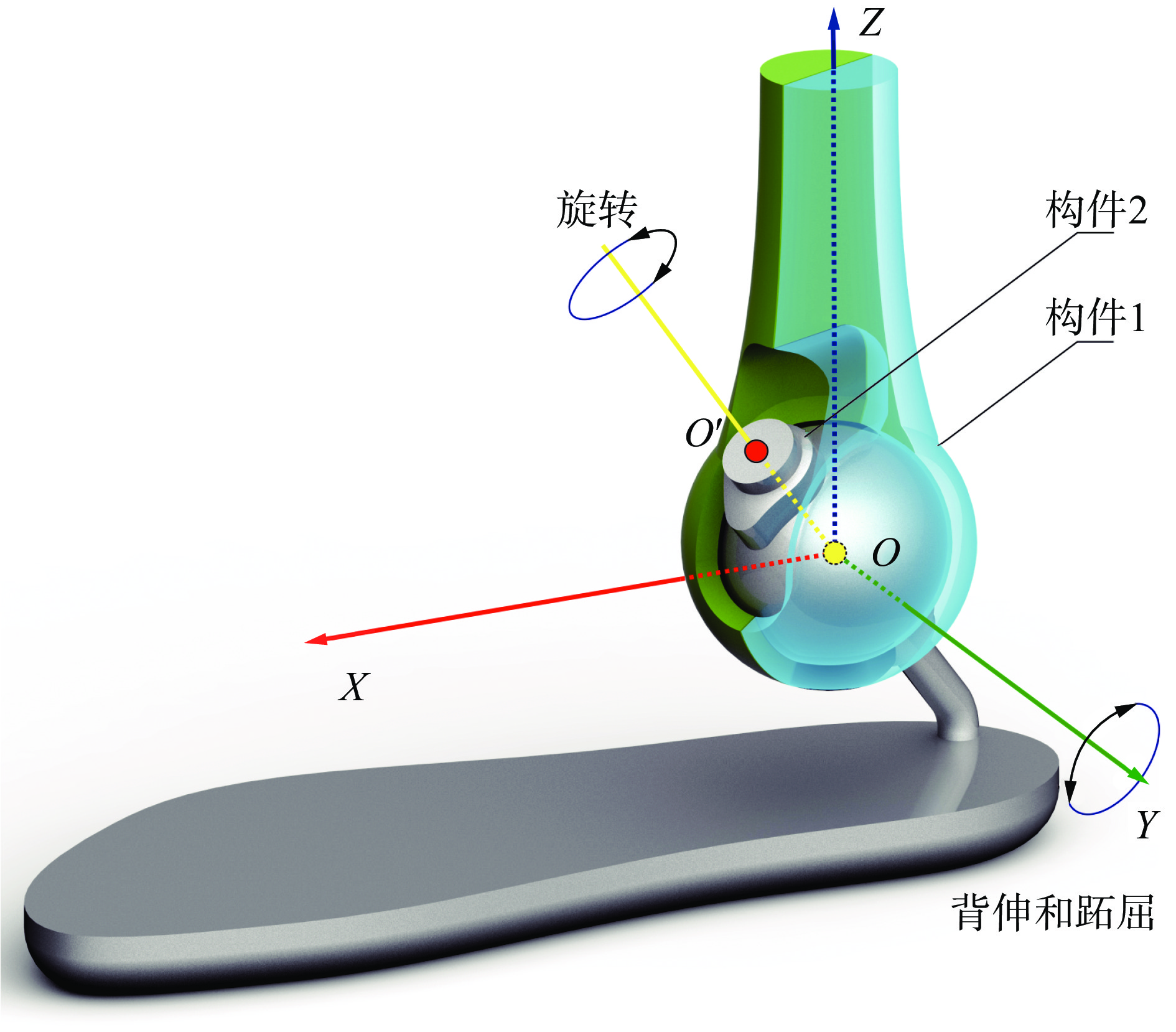
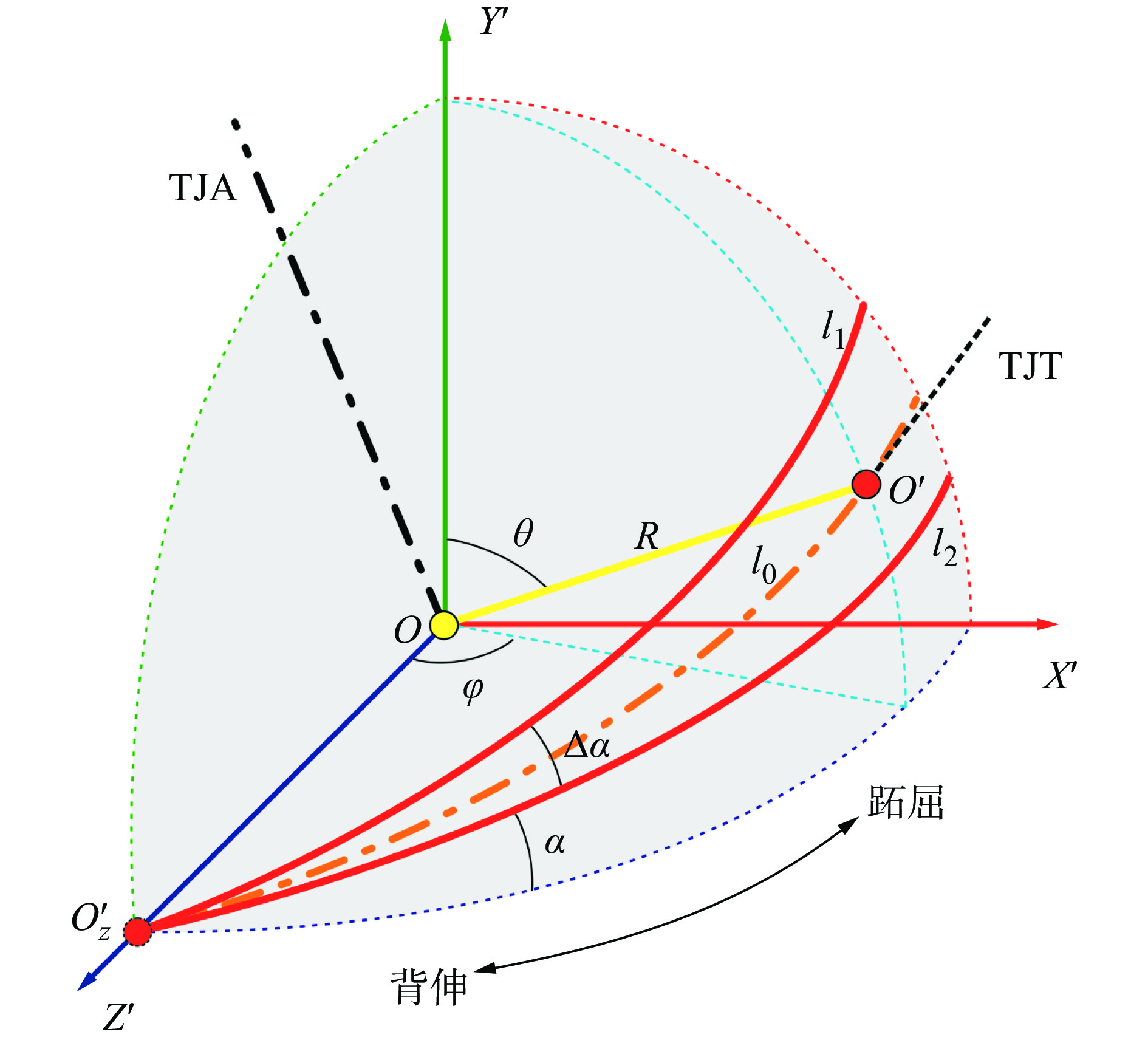
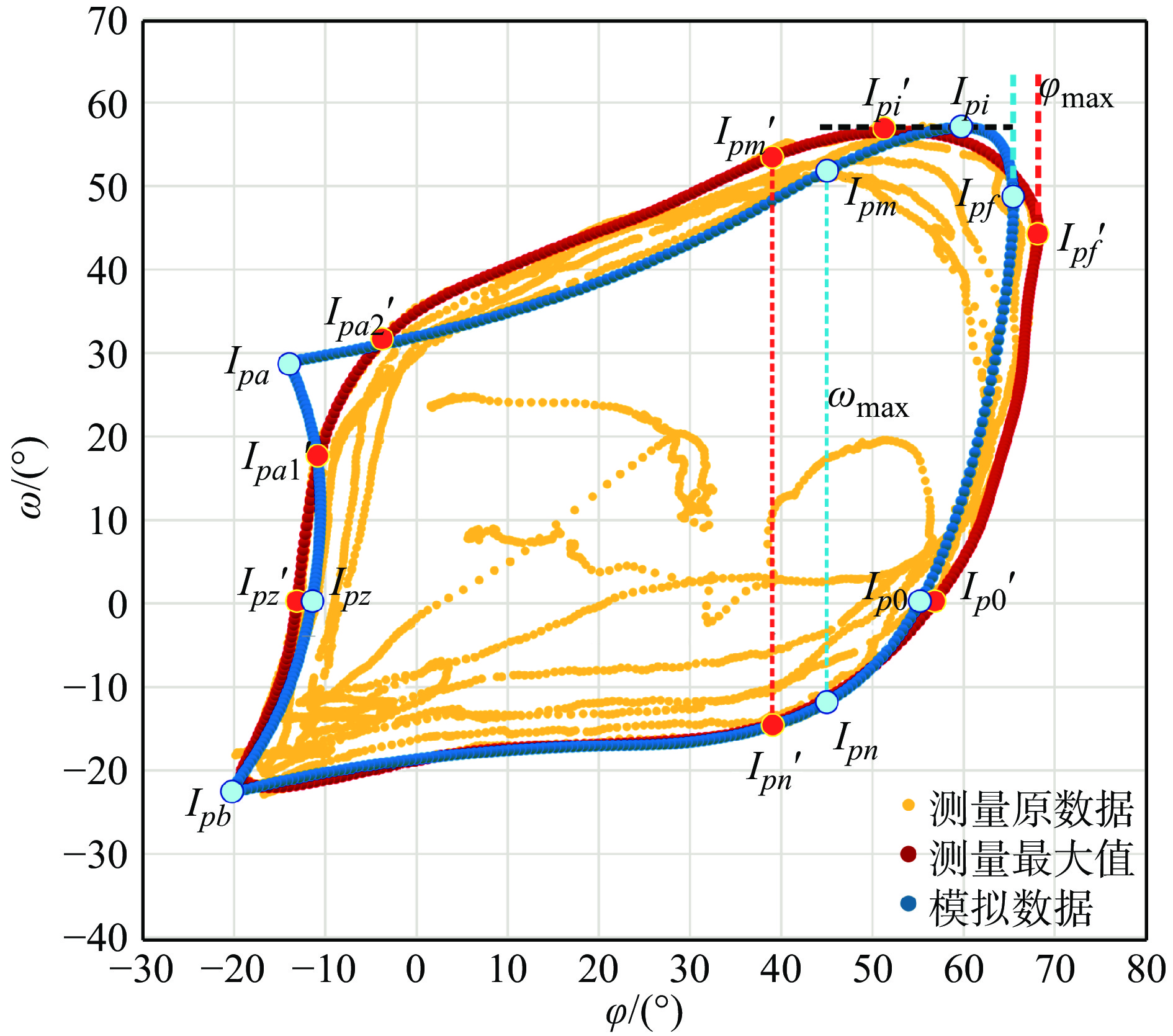
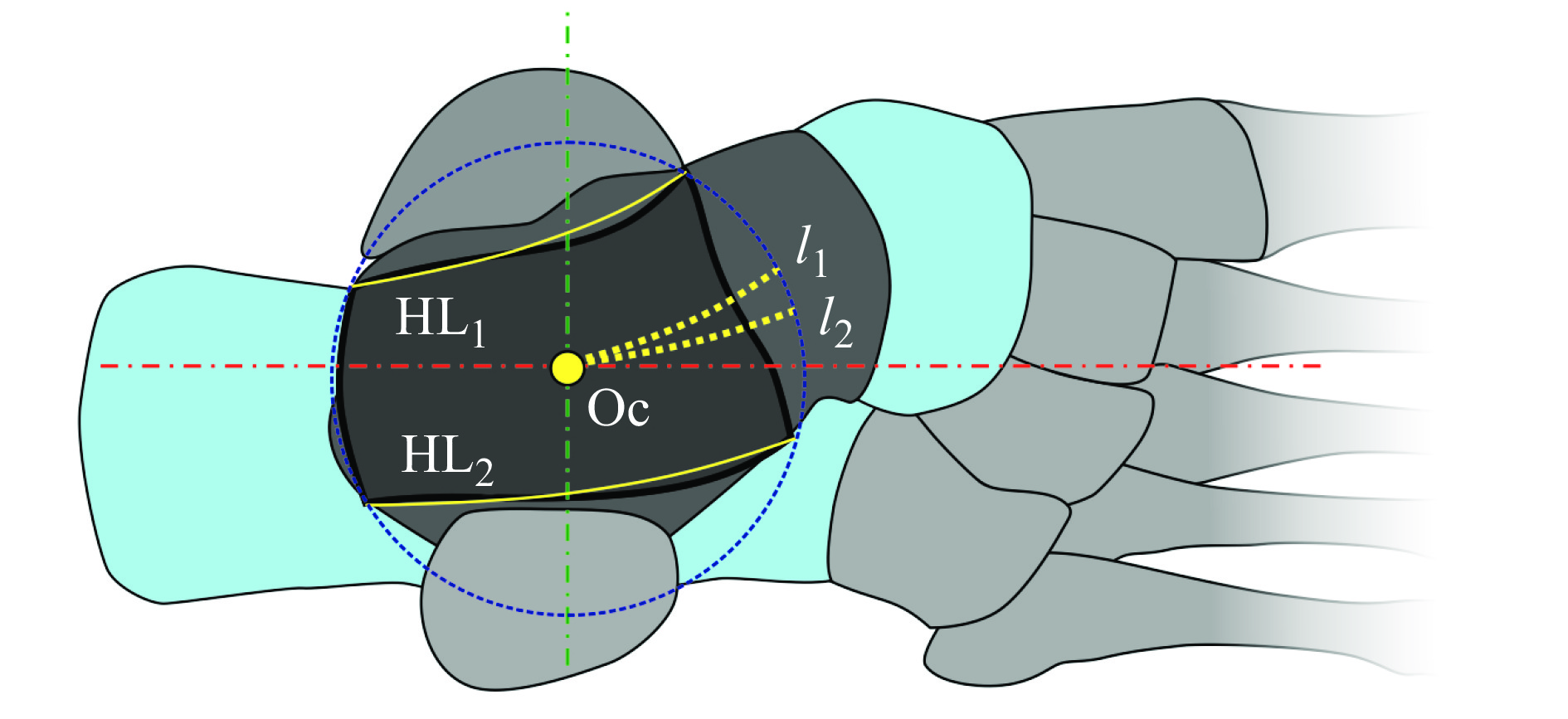
摘要: 人体足踝关节复杂,其运动主要包含背伸、跖屈、内收、外展、内翻以及外翻等,建立足踝关节复合运动模型利于对人体足踝运动的正确理解和应用。结合距上关节、距下关节活动方式以及距骨形态特征,假设随距骨运动的距下关节斜行纵轴运动轨迹为球面等角螺旋线;采用球型连接和铰链连接结合,并通过构件形态设计约束足踝运动角度的方式,构建了一种新型简易的足踝关节复合运动模型;讨论了模型参数范围以及该模型模拟足踝运动特征的可行性,调整和设置模型的各项具体参数,通过动作捕捉测量足表面上点的实际运动数据,对比分析了运动仿真与测量数据的差异。结果显示足踝复合关节的运动模型与实际测量数据吻合,说明能够通过该模型描述足踝关节的综合运动。Abstract: The foot and ankle are made up of many joints and the movement is composed of plantar flexion, dorsiflexion, adduction, abduction, inversion, eversion and so on. A model for describing the complex movement of foot and ankle joint is crucial to correctly understand the regular motion of the foot. This study constructed a kinematics model based on the movement mode of the supratalar and subtalar joints and the morphological characteristics of talus. Assuming that the trajectories of the subtalar joint axis conducted are spherical logarithmic helixes, a ball-and-socket combining with a hinge joint was adopted to simulate the motion and the foot movement is restricted by the morphological components design of the model. According to the related data in the references, the range of the parameters and the characteristic of the foot movement simulated by the model was discussed. A series parameters of the model were set and the angles output of foot were obtained. The motion capture of foot was carried out to collect the dynamic data of the foot. The comparison between the complex kinematics simulation and the detected data showed that the motion of the foot and ankle joint could be conveniently described by the present model.
-
表 1 α0 =15°, ∆ α =10°, γ0 =20°, γ1 =45°时输出角度
φ/(°) θ/(°) δ/(°) β/(°) 0 90.00 10.00 ~ 20.00 68.68 10 86.36 ~ 88.24 10.05 ~ 20.11 73.42 20 82.74 ~ 86.48 10.21 ~ 20.43 78.33 30 79.15 ~ 84.72 10.48 ~ 20.98 83.22 40 75.60 ~ 82.96 10.87 ~ 21.78 87.34 50 72.10 ~ 81.22 11.40 ~ 22.86 92.61 55 70.38 ~ 80.35 11.73 ~ 23.52 94.27 60 68.67 ~ 79.48 12.10 ~ 24.27 93.80 70 65.32 ~ 77.75 13.01 ~ 26.06 17.00  下载: 导出CSV
下载: 导出CSV
-
[1] SAMMARCO J. Biomechanics of the ankle: I. Surface velocity and instant center of rotation in the sagittal plane[J]. The American Journal of Sports Medicine, 1977, 5(6): 231-234 doi: 10.1177/036354657700500603 [2] BROCKETT C L, CHAPMAN G J. Biomechanics of the ankle[J]. Orthopaedics and Trauma, 2016, 30(3): 232-238 doi: 10.1016/j.mporth.2016.04.015 [3] ZWIPP H, RANDT T. Ankle joint biomechanics[J]. Foot and Ankle Surgery, 1994, 1(1): 21-27 doi: 10.1016/S1268-7731(05)80052-9 [4] GRIMSTON S K, NIGG B M, HANLEY D A, et al. Differences in ankle joint complex range of motion as a function of age[J]. Foot & Ankle International, 1993, 14(4): 215-222 [5] ARNDT A, WESTBLAD P, WINSON I, et al. Ankle and subtalar kinematics measured with intracortical pins during the stance phase of walking[J]. Foot & Ankle International, 2004, 25(5): 357-364 [6] SHEEHAN F T. The instantaneous helical axis of the subtalar and talocrural joints: a non-invasive in vivo dynamic study[J]. Journal of Foot and Ankle Research, 2010, 3(1): 13 doi: 10.1186/1757-1146-3-13 [7] CHO H J, KWAK D S, KIM I B. Analysis of movement axes of the ankle and subtalar joints: Relationship with the articular surfaces of the talus[J]. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 2014, 228(10): 1053-1058 doi: 10.1177/0954411914554820 [8] LEARDINI A, O'CONNOR J J, CATANI F, et al. A geometric model of the human ankle joint[J]. Journal of Biomechanics, 1999, 32(6): 585-591 doi: 10.1016/S0021-9290(99)00022-6 [9] CLAASSEN L, LUEDTKE P, YAO D W, et al. The geometrical axis of the talocrural joint-suggestions for a new measurement of the talocrural joint axis[J]. Foot and Ankle Surgery, 2019, 25(3): 371-377 doi: 10.1016/j.fas.2018.02.003 [10] DUL J, JOHNSON G E. A kinematic model of the human ankle[J]. Journal of Biomedical Engineering, 1985, 7(2): 137-143 doi: 10.1016/0141-5425(85)90043-3 [11] BELVEDERE C, SIEGLER S, ENSINI A, et al. Experimental evaluation of a new morphological approximation of the articular surfaces of the ankle joint[J]. Journal of Biomechanics, 2017, 53: 97-104 doi: 10.1016/j.jbiomech.2017.01.002 [12] WANG K Y, TOBAJAS P T, LIU J, et al. Towards a 3D passive dynamic walker to study ankle and toe functions during walking motion[J]. Robotics and Autonomous Systems, 2019, 115: 49-60 doi: 10.1016/j.robot.2019.02.010 [13] MARTELLI F, PALERMO E, DEL PRETE Z, et al. Using an ankle robotic device for motor performance and motor learning evaluation[J]. Heliyon, 2020, 6(1): e03262 doi: 10.1016/j.heliyon.2020.e03262 [14] WIEWIORSKI M, HOECHEL S, ANDERSON A E, et al. Computed tomographic evaluation of joint geometry in patients with end-stage ankle osteoarthritis[J]. Foot & Ankle International, 2016, 37(6): 644-651 [15] DETTWYLER M, STACOFF A, QUERVAIN I A K D, et al. Modelling of the ankle joint complex. Reflections with regards to ankle prostheses[J]. Foot and Ankle Surgery, 2004, 10(3): 110-119 [16] VAN DEN BOGERT A J, SMITH G D, NIGG B M. In vivo determination of the anatomical axes of the ankle joint complex: an optimization approach[J]. Journal of Biomechanics, 1994, 27(12): 1477-1488 doi: 10.1016/0021-9290(94)90197-X [17] HAYES A, TOCHIGI Y, SALTZMAN C L. Ankle morphometry on 3D-CT images[J]. The Iowa Orthopaedic Journal, 2006, 26: 1-4 [18] CLAASSEN L, LUDTKE P, ETTINGER S, et al. Ankle morphometry based on computerized tomography[J]. Foot and Ankle Surgery, 2016, 22(2 Suppl 1): 91-92 [19] IMAI K, TOKUNAGA D, TAKATORI R, et al. In vivo three-dimensional analysis of hindfoot kinematics[J]. Foot & Ankle International, 2009, 30(11): 1094-1100 [20] SIEGLER S, TOY J, SEALE D, et al. The clinical biomechanics award 2013—presented by the International Society of Biomechanics: new observations on the morphology of the talar dome and its relationship to ankle kinematics[J]. Clinical Biomechanics, 2014, 29(1): 1-6 doi: 10.1016/j.clinbiomech.2013.10.009 -




 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 232
- HTML全文浏览量: 79
- PDF下载量: 9
- 被引次数: 0
