




Posture Correction based on Omnidirectional AGV Driven by In-wheel Motor
-
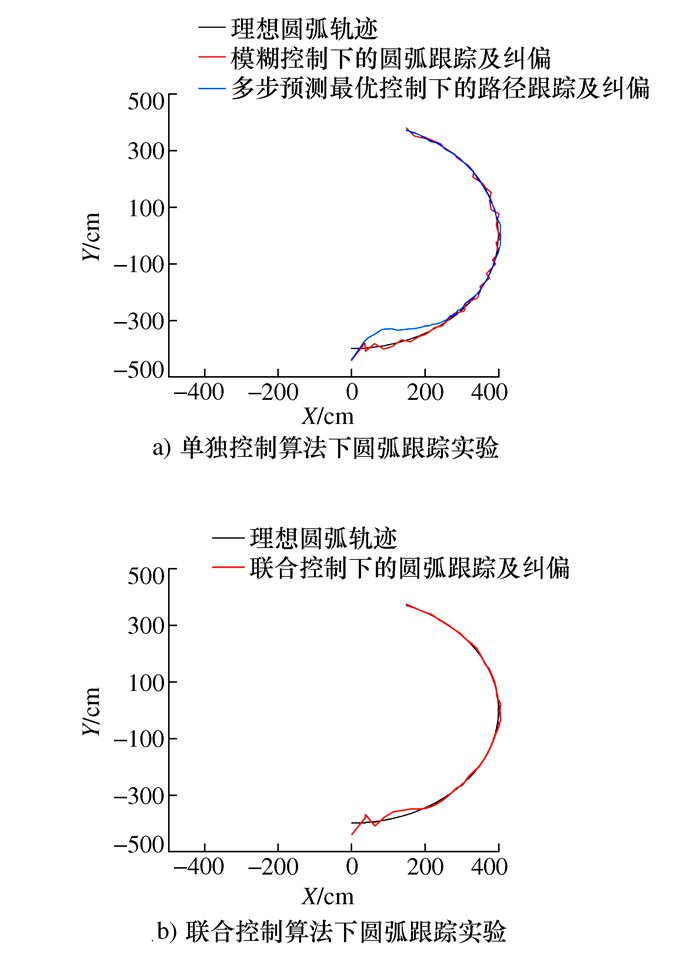
摘要: 由于各种因素的干扰, 全向AGV在行驶过程中会偏离期望路径, 针对这一问题, 本文开发基于轮毂电机的全向AGV样机并对其进行位姿纠偏研究和实验。首先, 根据样机四轮独立驱动、独立转向的特点, 进行运动学分析, 得到不同转向模式下转速与转角之间的关系。其次, 将位姿偏差分解为角度偏差和位置偏差, 利用模糊PID控制-多步预测最优控制联合控制的方式消除全向AGV的路径偏差, 并在轮毂电机和转向电机之间进行解耦计算。最后, 对控制策略进行仿真, 且在所开发的样机上进行直线与圆弧的路径跟踪实验, 结果表明全向AGV可以实现稳定的路径跟踪, 拥有良好的纠偏性能。Abstract: Due to the interference of various factors, the omnidirectional AGV usually deviates from its expected paths. Aiming at this problem, the omnidirectional AGV prototype based on the hub motor was developed and the pose correction research and experiment were carried out on it. Firstly, based on the motion characteristics of the four-wheel independent drive prototype, a kinematics analysis was performed to obtain the relationship between the rotational angle and the rotation speed in different steering modes. Secondly, the pose deviation is decomposed into angular deviation and position deviation. An integrated control strategy combining fuzzy PID control and multi-step prediction optimal control is proposed to eliminate the path deviation. And a decoupling computation was done between hub and steering motors. Finally, the simulation of the combining control strategy was performed. And based on the prototype, the path tracking experiments on arc and straight lines were performed. The results show that the omnidirectional AGV can achieve path tracking and has a good corrective performance.
-
Key words:
- automatic guided vehicle /
- pose rectification /
- hub motor /
- visual servo
-
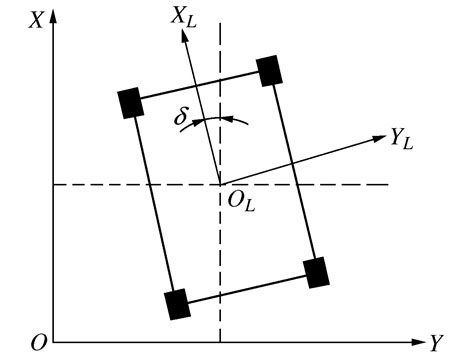
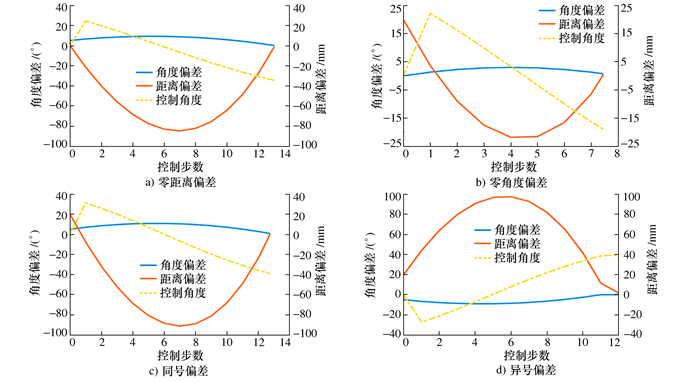
表 1 初始参数和初始偏差
车体轮距B 1 420 mm 控制周期Ti 0.1 s 零距离偏差 eθ=5° ed=0 零角度偏差 eθ=0 ed=20 mm 同号偏差 eθ=5° ed=20 mm 异号偏差 eθ=-5° ed=20 mm  下载: 导出CSV
下载: 导出CSV
-
[1] JI X W, LIU Y L, HE X K, et al. Interactive control paradigm-based robust lateral stability controller design for autonomous automobile path tracking with uncertain disturbance: a dynamic game approach[J]. IEEE Transactions on Vehicular Technology, 2018, 67(8): 6906-6920 doi: 10.1109/TVT.2018.2834381 [2] 武启平, 金亚萍, 任平, 等. 自动导引车(AGV)关键技术现状及其发展趋势[J]. 制造业自动化, 2013, 35(10): 106-109, 121 https://www.cnki.com.cn/Article/CJFDTOTAL-JXGY201310031.htmWU Q P, JIN Y P, REN P, et al. Present situation and developing trend of AGV key technology[J]. Manufacturing Automation, 2013, 35(10): 106-109, 121 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXGY201310031.htm [3] CHEEIN F A. Intelligent sampling technique for path tracking controllers[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 747-755 doi: 10.1109/TCST.2015.2450180 [4] HWANG C L, YANG C C, HUNG J Y. Path tracking of an autonomous ground vehicle with different payloads by hierarchical improved fuzzy dynamic sliding-mode control[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(2): 899-914 doi: 10.1109/TFUZZ.2017.2698370 [5] 石陈陈, 楼佩煌, 武星, 等. 自动导引车多摄像机主动导引系统的协同标定[J]. 仪器仪表学报, 2014, 35(11): 2589-2599 https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201411023.htmSHI C C, LOU P H, WU X, et al. Collaborative calibration of initiative multi-camera guiding system for transport automatic guided vehicle[J]. Chinese Journal of Scientific Instrument, 2014, 35(11): 2589-2599 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201411023.htm [6] 罗哉, 刘慧平, 胡晓峰, 等. 视觉导引AGV纠偏算法研究[J]. 计算机仿真, 2016, 33(1): 373-377 doi: 10.3969/j.issn.1006-9348.2016.01.081LUO Z, LIU H P, HU X F, et al. Research of vision-guided AGV deviation-rectifying algorithm[J]. Computer Simulation, 2016, 33(1): 373-377 (in Chinese) doi: 10.3969/j.issn.1006-9348.2016.01.081 [7] 牛雪梅, 高国琴, 鲍智达, 等. 基于滑模变结构控制的温室喷药移动机器人路径跟踪[J]. 农业工程学报, 2013, 29(2): 9-16 https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201302003.htmNIU X M, GAO G Q, BAO Z D, et al. Path tracking of mobile robots for greenhouse spraying controlled by sliding mode variable structure[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(2): 9-16 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201302003.htm [8] 刘正铎, 张万枝, 吕钊钦, 等. 扰动下农用运输车辆路径跟踪控制器设计与试验[J]. 农业机械学报, 2018, 49(12): 378-386 doi: 10.6041/j.issn.1000-1298.2018.12.045LIU Z D, ZHANG W Z, LYU Z Q, et al. Design on trajectory tracking controller of agricultural vehicles under disturbances[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(12): 378-386 (in Chinese) doi: 10.6041/j.issn.1000-1298.2018.12.045 [9] 姜立标, 杨杰. 基于滑模控制的自动泊车系统路径跟踪研究[J]. 农业机械学报, 2019, 50(2): 356-364 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201902041.htmJIANG L B, YANG J. Path tracking of automatic parking system based on sliding mode control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 356-364 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201902041.htm [10] 赵治国, 周良杰, 朱强. 无人驾驶车辆路径跟踪控制预瞄距离自适应优化[J]. 机械工程学报, 2018, 54(24): 166-173 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824020.htmZHAO Z G, ZHOU L J, ZHU Q. Preview distance adaptive optimization for the path tracking control of unmanned vehicle[J]. Journal of Mechanical Engineering, 2018, 54(24): 166-173 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824020.htm [11] 孟庆宽, 仇瑞承, 张漫, 等. 基于改进粒子群优化模糊控制的农业车辆导航系统[J]. 农业机械学报, 2015, 46(3): 29-36, 58 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201503005.htmMENG Q K, QIU R C, ZHANG M, et al. Navigation system of agricultural vehicle based on fuzzy logic controller with improved particle swarm optimization algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 29-36, 58 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201503005.htm [12] 汤红杰. 磁导引差速AGV设计与模糊PID控制路径校正[D]. 济南: 山东大学, 2018TANG H J. Design of magnetic guidance differential AGV and fuzzy PID path correction[J]. Ji'nan: Shandong University, 2018 (in Chinese) [13] 汪伟, 赵又群, 许健雄, 等. 基于模糊控制的汽车路径跟踪研究[J]. 中国机械工程, 2014, 25(18): 2532-2537, 2538 doi: 10.3969/j.issn.1004-132X.2014.18.023WANG W, ZHAO Y Q, XU J X, et al. Research on vehicle path tracking based on fuzzy control[J]. China Mechanical Engineering, 2014, 25(18): 2532-2537, 2538 (in Chinese) doi: 10.3969/j.issn.1004-132X.2014.18.023 [14] 杨天旭, 楼佩煌, 钱晓明. 融合多模糊控制器的全方位移动AGV路径跟踪控制技术[J]. 机械设计与制造工程, 2016, 45(7): 57-61 doi: 10.3969/j.issn.2095-509X.2016.07.013YANG T X, LOU P H, QIAN X M. Fusion fuzzy controller of path tracking for the omni-directional mobile AGV[J]. Machine Design and Manufacturing Engineering, 2016, 45(7): 57-61 (in Chinese) doi: 10.3969/j.issn.2095-509X.2016.07.013 [15] 钱晓明, 朱立群, 楼佩煌, 等. 基于位姿状态的全向运行型AGV路径跟踪优化控制方法[J]. 农业机械学报, 2018, 49(4): 20-26 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201804002.htmQIAN X M, ZHU L Q, LOU P H, et al. Optimal path tracking control method of omni-directional mobile AGV based on pose state[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 20-26 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201804002.htm [16] 褚健, 胡协和, 王树青. 关于最优调节器LQR鲁棒性的讨论[J]. 控制与决策, 1992, 7(6): 478-481 https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC199206015.htmCHU J, HU X H, WANG S Q. On the robustness of optimal regulator LQR systems[J]. Control and Decision, 1992, 7(6): 478-481 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC199206015.htm [17] 武星, 楼佩煌, 唐敦兵. 自动导引车路径跟踪和伺服控制的混合运动控制[J]. 机械工程学报, 2011, 47(3): 43-48 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201103008.htmWU X, LOU P H, TANG D B. Integrated motion control of path tracking and servo control for an automated guided vehicle[J]. Journal of Mechanical Engineering, 2011, 47(3): 43-48 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201103008.htm [18] 刘成, 赵福宇, 侯素霞, 等. 一种新的多变量参考模型解耦控制的方法[J]. 控制工程, 2009, 16(1): 12-15, 38 doi: 10.3969/j.issn.1671-7848.2009.01.004LIU C, ZHAO F Y, HOU S X, et al. A reference model decoupling method for multivariable systems[J]. Control Engineering of China, 2009, 16(1): 12-15, 38 (in Chinese) doi: 10.3969/j.issn.1671-7848.2009.01.004 -






 点击查看大图
点击查看大图

图(9) / 表(1)
计量
- 文章访问数: 132
- HTML全文浏览量: 35
- PDF下载量: 23
- 被引次数: 0
