




Auto Disturbance Rejection Tracking Control of Electro-hydraulic Position Servo System Optimized by Improved PSO Algorithm
-
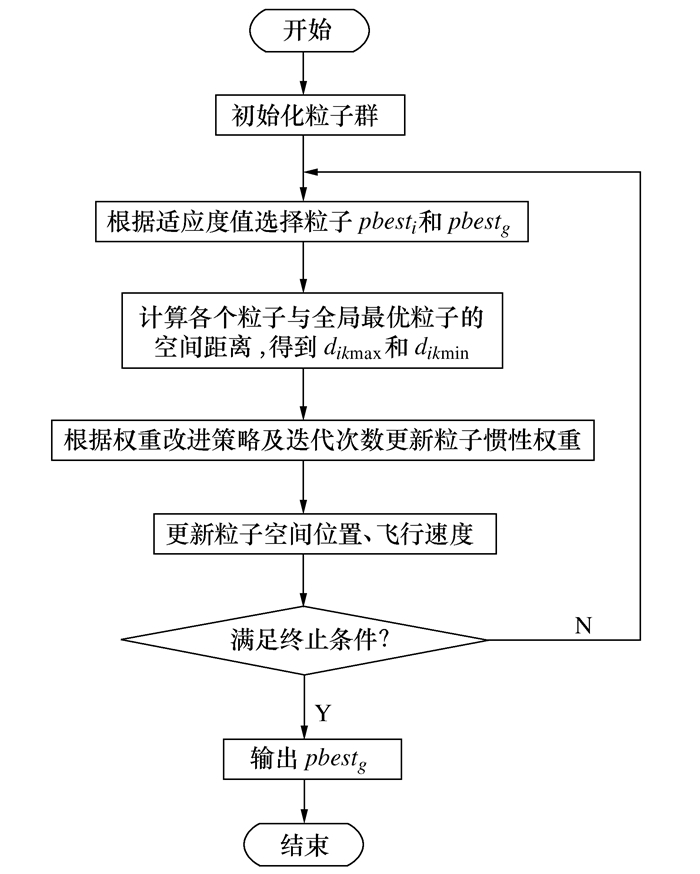
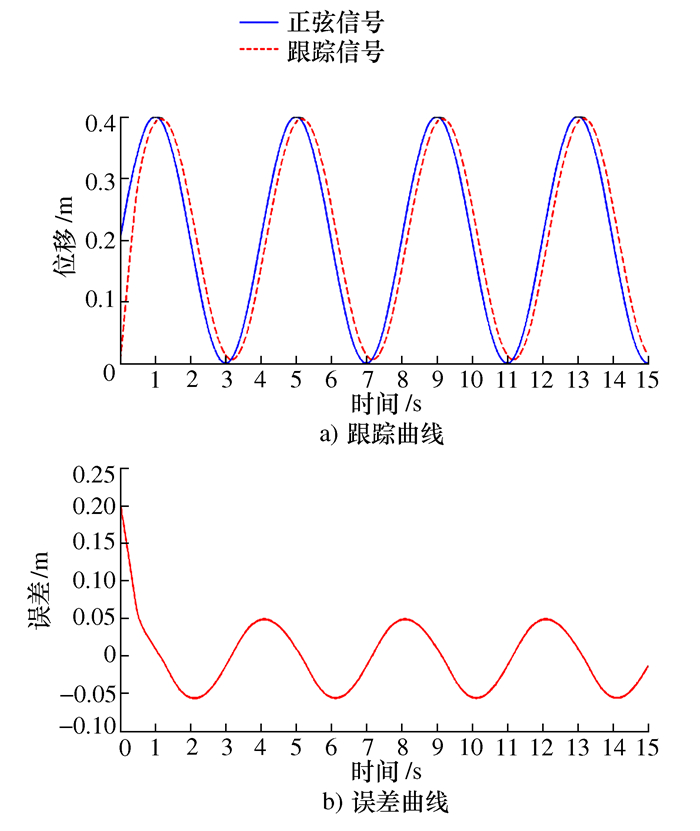
摘要: 针对电液位置伺服系统由于参数不确定性、非线性、复杂时变性而导致的响应速度慢、跟踪精度低、抗干扰能力差的问题, 提出一种具有更高跟踪精度及抑制抖振能力的改进PSO算法优化的自抗扰控制(Improved-PSO auto disturbance rejection control, IPSO-ADRC)方法。首先, 建立电液位置伺服系统的误差状态空间方程, 采用3阶跟踪微分器、扩张状态观测器及状态误差反馈律构建自抗扰控制器模型; 其次, 分析惯性权重递减PSO算法存在的早熟、易陷入局部最小值等问题, 综合考虑粒子迭代次数及当前粒子与全局最优粒子间距离两个因素对寻优结果的影响, 提出一种改进PSO算法; 最后, 将改进后的PSO算法应用于所设计的自抗扰控制器中以提高控制性能。仿真及试验结果表明, 相比于传统PID控制和常规自抗扰控制, 采用改进PSO算法优化的自抗扰控制具有位置跟踪精度高、抗干扰能力好的优点。Abstract: To overcome the slow response speed, low tracking accuracy and poor anti-interference ability of an electro-hydraulic position servo system due to parameter uncertainty, nonlinear and complex time-variance, an improved PSO algorithm that has higher tracking accuracy and vibration suppression capability is proposed. Firstly, the error state space equation of the electro-hydraulic position servo system is established. Secondly, an auto disturbance rejection control model is constructed by adopting a third-order tracking differentiator, an expansion state observer and a state error feedback law. Thirdly, the premature and local minimum of inertia weight decreasing PSO algorithm is analyzed. Taking into consideration the influence of the number of particle iterations and the distance between the current particle and the global optimal particle on the optimization result, an improved PSO algorithm is proposed. Finally, the improved PSO algorithm is applied to the auto disturbance rejection controller designed in the paper to improve its control performance. The simulation and experimental results show that the improved PSO algorithm has the advantages of high position tracking accuracy and good anti-interference ability.
-
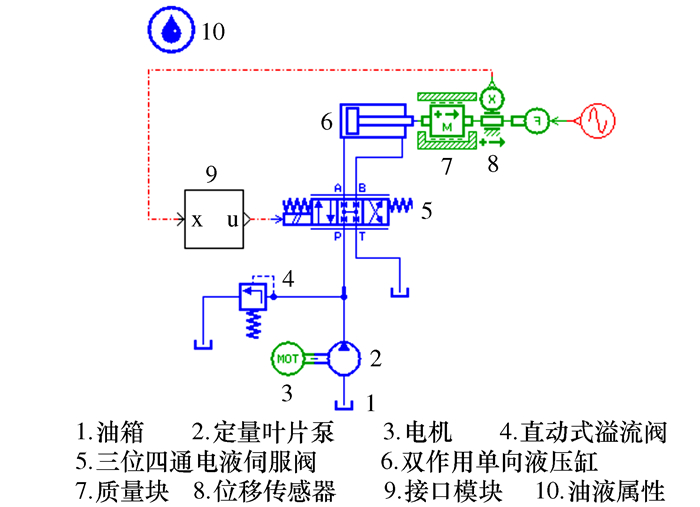
表 1 电液位置伺服系统AMEsim仿真参数
参数 数值 液压油密度/(kg·m-3) 850 液压油动力粘度/(Pa·s) 0.03 液压泵系统压力/MPa 15 液压泵系统流量/(L·min-1) 300 电液伺服阀额定电流/mA 50 电液伺服阀固有频率/Hz 100 电液伺服阀最大开口流量/(L·min-1) 150 活塞缸直径/mm 130 活塞直径/mm 85 负载总质量/kg 100 电机转速/(r·min-1) 1 500  下载: 导出CSV
下载: 导出CSV
-
[1] 王占林. 近代电气液压伺服控制[M]. 北京: 北京航空航天大学出版社, 2005WANG Z L. Modern electrohydraulic servo control[M]. Beijing: Beihang University Press, 2005 (in Chinese) [2] 姜万录, 朱勇, 郑直, 等. 电液伺服系统非线性振动机理及试验研究[J]. 机械工程学报, 2015, 51(4): 175-184 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201504027.htmJIANG W L, ZHU Y, ZHENG Z, et al. Nonlinear vibration mechanism of electro-hydraulic servo system and its experimental verification[J]. Journal of Mechanical Engineering, 2015, 51(4): 175-184 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201504027.htm [3] 李拓彬. 电液伺服系统PID神经网络控制策略研究与应用[D]. 长沙: 中南大学, 2013LI T B. Research and application on ANPID control algorithm for electro-hydraulic servo system[D]. Changsha: Central South University, 2013 (in Chinese) [4] 马晓宏. 电液比例阀控缸位置控制系统的研究与应用[D]. 上海: 东华大学, 2008MA X H. Research and application on the position control system of electro-hydraulic proportional valve-controlled cylinder[D]. Shanghai: Donghua University, 2008 (in Chinese) [5] GUO Q, YU T, DAN J. Adaptive backstepping design of electro-hydraulic actuator based on state feedback control[C]//2015 International Conference on Fluid Power and Mechatronics (FPM). Harbin: IEEE, 2015: 888-891 [6] LOUKIANOV A G, SANCHEZ E, LIZALDE C. Force tracking neural block control for an electro-ydraulic actuator via second-rder sliding mode[J]. International Journal of Robust and Nonlinear Control, 2008, 18(3): 319-332 doi: 10.1002/rnc.1222 [7] 徐莉萍, 蔡留金, 李健, 等. 基于自抗扰控制的铣面机床电液位置伺服系统控制策略[J]. 计算机集成制造系统, 2018, 24(11): 2770-2778 https://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ201811012.htmXU L P, CAI L J, LI J, et al. Control strategy of electro-hydraulic position servo system for surface milling machine based on active disturbance rejection control[J]. Computer Integrated Manufacturing Systems, 2018, 24(11): 2770-2778 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ201811012.htm [8] 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23 doi: 10.3321/j.issn:1001-0920.1998.01.005HAN J Q. Auto-disturbances-rejection controller and its application[J]. Control and Decision, 1998, 13(1): 19-23 (in Chinese) doi: 10.3321/j.issn:1001-0920.1998.01.005 [9] 林浩, 李恩, 梁自泽. 具有非线性不确定参数的电液伺服系统自适应backstepping控制[J]. 控制理论与应用, 2016, 33(2): 181-188 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201602006.htmLIN H, LI E, LIANG Z Z. Adaptive backstepping controller for electro-hydraulic servo system with nonlinear uncertain parameters[J]. Control Theory & Applications, 2016, 33(2): 181-188 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201602006.htm [10] 刘云峰, 缪栋. 电液伺服系统的自适应滑模跟踪控制研究[J]. 电光与控制, 2006, 13(6): 56-59 doi: 10.3969/j.issn.1671-637X.2006.06.015LIU Y F, MIAO D. Research on adaptive sliding mode tracking control for electro-hydraulic servo system[J]. Electronics Optics & Control, 2006, 13(6): 56-59 (in Chinese) doi: 10.3969/j.issn.1671-637X.2006.06.015 [11] 姜仁华, 刘闯, 宁银行, 等. 雷达伺服系统的高跟踪精度改进型自抗扰控制器[J]. 电机与控制学报, 2019, 23(5): 102-109 https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201905014.htmJIANG R H, LIU C, NING Y H, et al. Improved auto-disturbance rejection controller of radar servo-system with high tracking accuracy[J]. Electric Machines and Control, 2019, 23(5): 102-109 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201905014.htm [12] KENNEDY J, EBERHART R. Particle swarm optimization[C]//Proceedings of ICNN'95-International Conference on Neural Network. Perth: IEEE, 1995: 1942-1948 [13] 徐向阳, 韩洵, 艾星, 等. 改进粒子群算法的行星齿轮系统多目标优化研究[J]. 机械科学与技术, 2018, 37(9): 1352-1358 doi: 10.13433/j.cnki.1003-8728.20180068XU X Y, HAN X, AI X, et al. Research on multi-objective optimization of planetary gear system with improved particle swarm optimization[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(9): 1352-1358 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180068 [14] 戴文智, 杨新乐. 基于惯性权重对数递减的粒子群优化算法[J]. 计算机工程与应用, 2015, 51(17): 14-19, 52 doi: 10.3778/j.issn.1002-8331.1412-0259DAI W Z, YANG X L. Particle swarm optimization algorithm based on inertia weight logarithmic decreasing[J]. Computer Engineering and Applications, 2015, 51(17): 14-19, 52 (in Chinese) doi: 10.3778/j.issn.1002-8331.1412-0259 [15] 周利军, 彭卫, 曾小强, 等. 基于杂交变异的动态粒子群优化算法[J]. 计算机科学, 2013, 40(S2): 143-146 https://www.cnki.com.cn/Article/CJFDTOTAL-JSJA2013S2036.htmZHOU L J, PENG W, ZENG X Q, et al. Dynamic particle swarm optimization based on hybrid variable[J]. Computer Science, 2013, 40(S2): 143-146 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJA2013S2036.htm [16] 王继努, 李天富, 段方亮, 等. AMESim在液压元件仿真中的应用研究[J]. 液压气动与密封, 2011, 31(3): 1-3 https://www.cnki.com.cn/Article/CJFDTOTAL-YYQD201103002.htmWANG J N, LI T F, DUAN F L, et al. Application research on AMESim in hydraulic components[J]. Hydraulics Pneumatics & Seals, 2011, 31(3): 1-3 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YYQD201103002.htm -





 点击查看大图
点击查看大图
图(13) / 表(1)
计量
- 文章访问数: 180
- HTML全文浏览量: 53
- PDF下载量: 22
- 被引次数: 0
