




Design of Improved Fixed Time Sliding Mode Control Method for Manipulator Trajectory Tracking
-
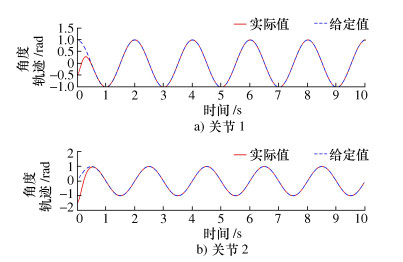
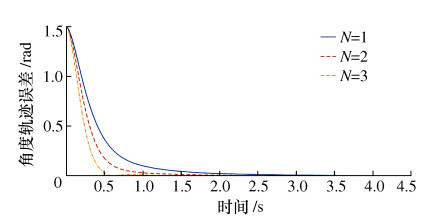
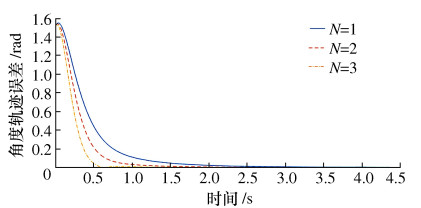
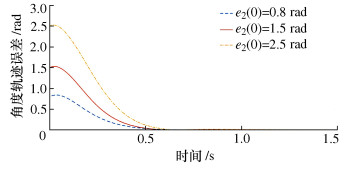
摘要: 当机械臂末端对给定轨迹进行跟踪控制时,跟踪误差收敛速度容易受初始跟踪误差大小的影响,针对这一问题设计了一种适用于机械臂模型的改进固定时间滑模轨迹跟踪控制策略。在快速终端滑模面的基础上,设计了一种固定时间滑模面,从而使得控制器具有固定时间收敛特性并给与证明;针对滑模控制伴随抖震的特性,对滑模控制器的趋近律进行了抑制抖振的改进,使得趋近律具有一定的自适应性。通过对二自由度机械臂的仿真实验,验证了在系统含有未知扰动的情况下,设计的改进固定时间滑模控制器能够在固定时间内使得机械臂末端轨迹跟踪误差快速收敛,且通过控制器参数的调整能够达到更快的收敛速率。通过仿真对比,验证了论文设计方法的收敛速率要快于快速终端滑模控制方法。Abstract: The tracking error convergence rate is easily affected by the size of initial tracking error when the manipulator terminal is controlled for tracking a given trajectory. Aiming at this problem, an improved fixed-time sliding mode trajectory tracking control strategy suitable for the manipulator model is designed in this paper. Based on the fast terminal sliding mode surface, a fixed time sliding mode surface is designed, so that the controller has fixed time convergence and is proved. Aiming at the characteristic of sliding mode control with chattering, this paper improves the approach law of sliding mode controller to suppress chattering, so that the approach law has some adaptability. Through the simulation experiment of the two-degree-of-freedom manipulator, it is verified that the improved fixed-time sliding mode controller designed in this paper can make the trajectory tracking error of the manipulator end converge rapidly within a fixed time and achieve a faster convergence rate by adjusting the controller parameters under the condition of unknown disturbance. The simulation results show that the convergence rate of the proposed method is faster than that of the fast terminal sliding mode control method.
-
[1] WANG D, HE H B, LIU D R. Adaptive critic nonlinear robust control: a survey[J]. IEEE Transactions on Cybernetics, 2017, 47(10): 3429-3451 doi: 10.1109/TCYB.2017.2712188 [2] FERRARA A, INCREMONA G P. Design of an integral suboptimal second-order sliding mode controller for the robust motion control of robot manipulators[J]. IEEE Transactions on Control Systems Technology, 2015, 23(6): 2316-2325 doi: 10.1109/TCST.2015.2420624 [3] BENADDA H, BOURAHLA B, MANSOURI A. Robust observer based backstepping controller for robot manipulator[C]//2016 8th International Conference on Modelling, Identification and Control (ICMIC). Algiers: IEEE, 2016: 91-96 [4] DONG F F, ZHAO X M, HAN J, et al. Optimal fuzzy adaptive control for uncertain flexible joint manipulator based on D-operation[J]. IET Control Theory & Applications, 2018, 12(9): 1286-1298 http://www.onacademic.com/detail/journal_1000040441390410_8c06.html [5] LI S, ZHANG Y, JIN L. Kinematic control of redundant manipulators using neural networks[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(10): 2243-2254 doi: 10.1109/TNNLS.2016.2574363 [6] YU S H, YU X H, ZHIHONG M. Robust global terminal sliding mode control of SISO nonlinear uncertain systems[C]// Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No. 00CH37187). Sydney: IEEE, 2000, 3: 2198-2203 [7] YU X H, ZHIHONG M. Fast terminal sliding-mode control design for nonlinear dynamical systems[J]. IEEE Transactions on Circuits and Systems Ⅰ: Fundamental Theory and Applications, 2002, 49(2): 261-264 doi: 10.1109/81.983876 [8] POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110 doi: 10.1109/TAC.2011.2179869 [9] POLYAKOV A, EFIMOV D, PERRUQUETTI W. Robust stabilization of MIMO systems in finite/fixed time[J]. International Journal of Robust and Nonlinear Control, 2016, 26(1): 69-90 doi: 10.1002/rnc.3297 [10] ZUO Z Y. Nonsingular fixed-time consensus tracking for second-order multi-agent networks[J]. Automatica, 2015, 54: 305-309 doi: 10.1016/j.automatica.2015.01.021 [11] TIAN B L, ZUO Z Y, YAN X M, et al. A fixed-time output feedback control scheme for double integrator systems[J]. Automatica, 2017, 80: 17-24 doi: 10.1016/j.automatica.2017.01.007 [12] JIMÉNEZ-RODRÍGUEZ E, SÁNCHEZ-TORRES J D, LOUKIANOV A G. On optimal predefined-time stabilization[J]. International Journal of Robust and Nonlinear Control, 2017, 27(17): 3620-3642 doi: 10.1002/rnc.3757 [13] NI J, LIU L, LIU C X, et al. Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2017, 64(2): 151-155 doi: 10.1109/TCSII.2016.2551539 [14] 张晓光. 永磁同步电机调速系统滑模变结构控制若干关键问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2014ZHANG X G. Research on key issuses of permanent magnet sysnchronous motor sliding mode speed control system[D]. Harbin: Harbin Institute of Technology, 2014 (in Chinese) [15] 刘金琨. 机器人控制系统的设计与MATLAB仿真: 先进设计方法[M]. 北京: 清华大学出版社, 2017LIU J K. Robot control system design and MATLAB simulation: the advanced design method[M]. Beijing: Tsinghua University Press, 2017 (in Chinese) -

 下载:
下载:


 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 204
- HTML全文浏览量: 106
- PDF下载量: 40
- 被引次数: 0
