




Study on Hybrid Brake Control of Distributed Drive Electric Vehicle
-
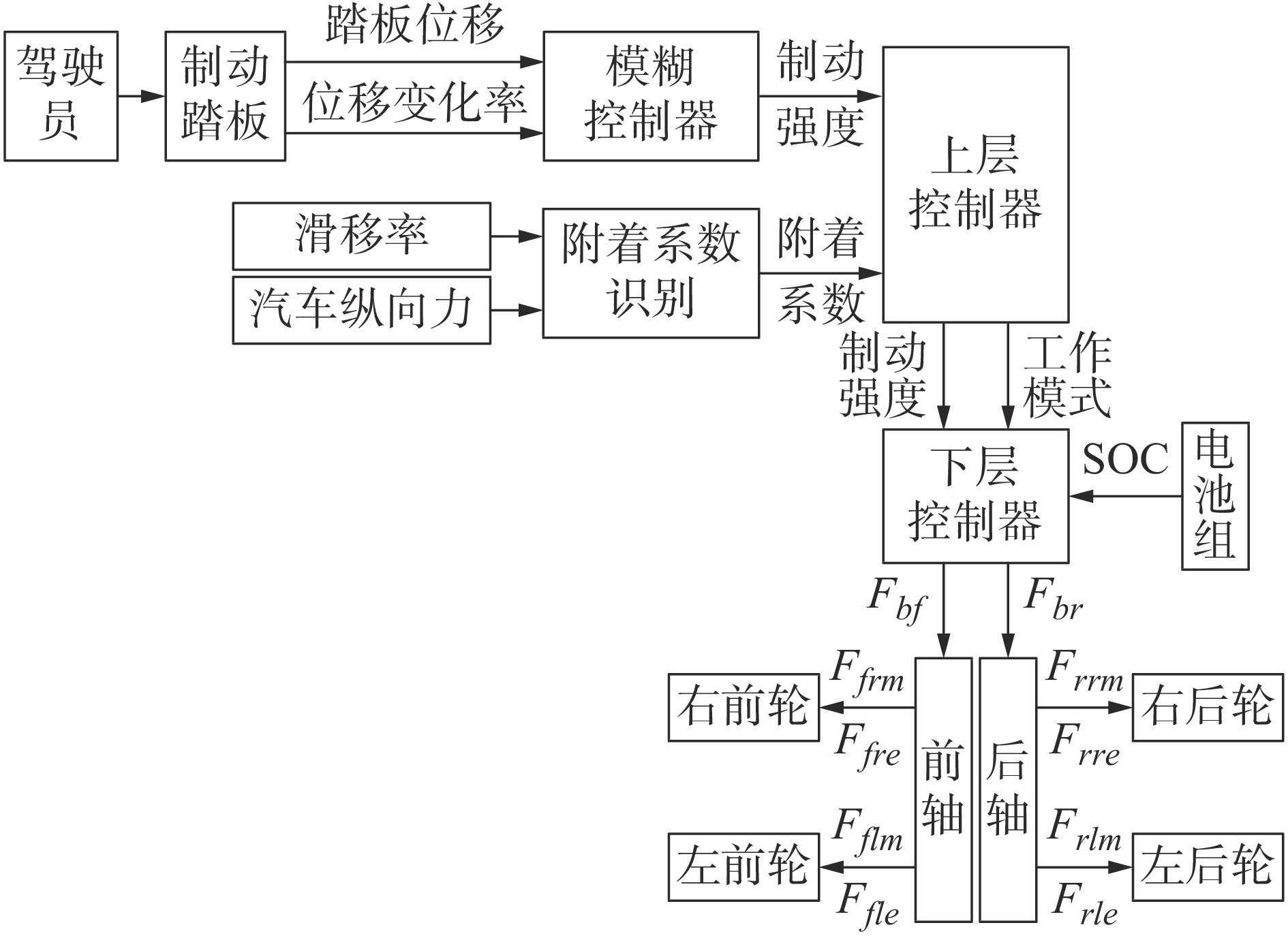
摘要: 针对分布式驱动电动汽车制动模式切换条件限制能量回收的问题,制定了一种制动工作模式切换条件,设计了一种复合制动控制策略,其中,制动转矩分配采用分层控制的方法,上层控制器计算需求制动力矩,选择制动工作模式,下层控制器根据制动控制策略分配各轮的液压制动力和电机制动力。在建立分布式驱动电动汽车复合制动模型的基础上,利用AMEsim与Simulink在各种行驶工况下进行联合仿真,对所提出的复合制动控制策略进行验证。结果表明,本文所提出的复合制动系统能够准确地切换制动工作模式,在保证车辆的制动效能和稳定性的同时最大程度回收制动能量。Abstract: For the energy recovery by limiting the distributed drive electric vehicle braking mode switching condition, a new braking mode switching condition was set and a new compound braking control strategy was designed, by dividing braking torque distributed strategy into the top-level and the low-level control strategy. The top-level control strategy selected a best braking mode, low-level control strategy distributed the electronic brake force and hydraulic brake force for every wheel. A hybrid brake control model for the distributed drive electric vehicle was built by AMEsim and Simulink, and the simulation analysis of the control strategy was conducted with different driving conditions. The results show that the present control strategy can accurately switch the braking mode, and make the maximum braking energy recovery while keeping the braking stability.
-
Key words:
- distributed electric vehicle /
- braking mode /
- braking stability /
- energy recovery
-
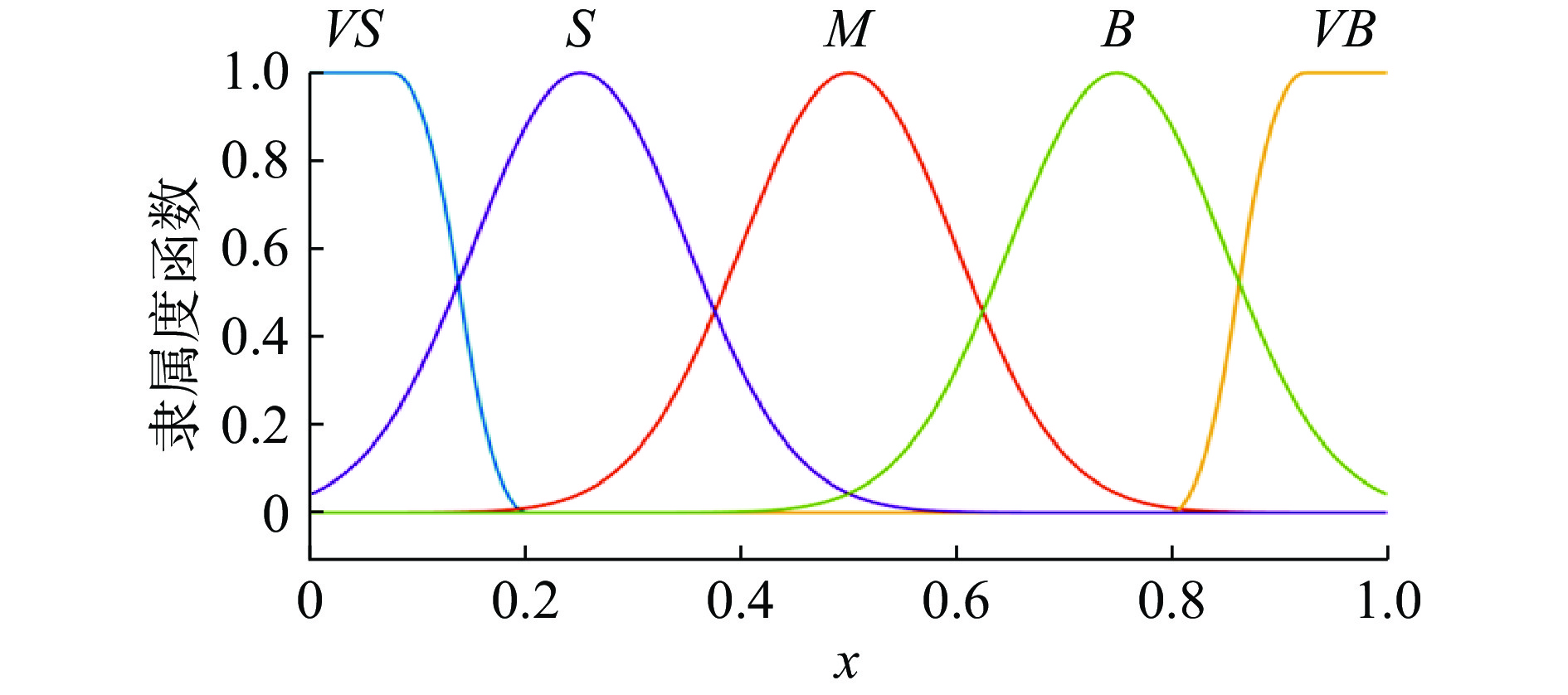
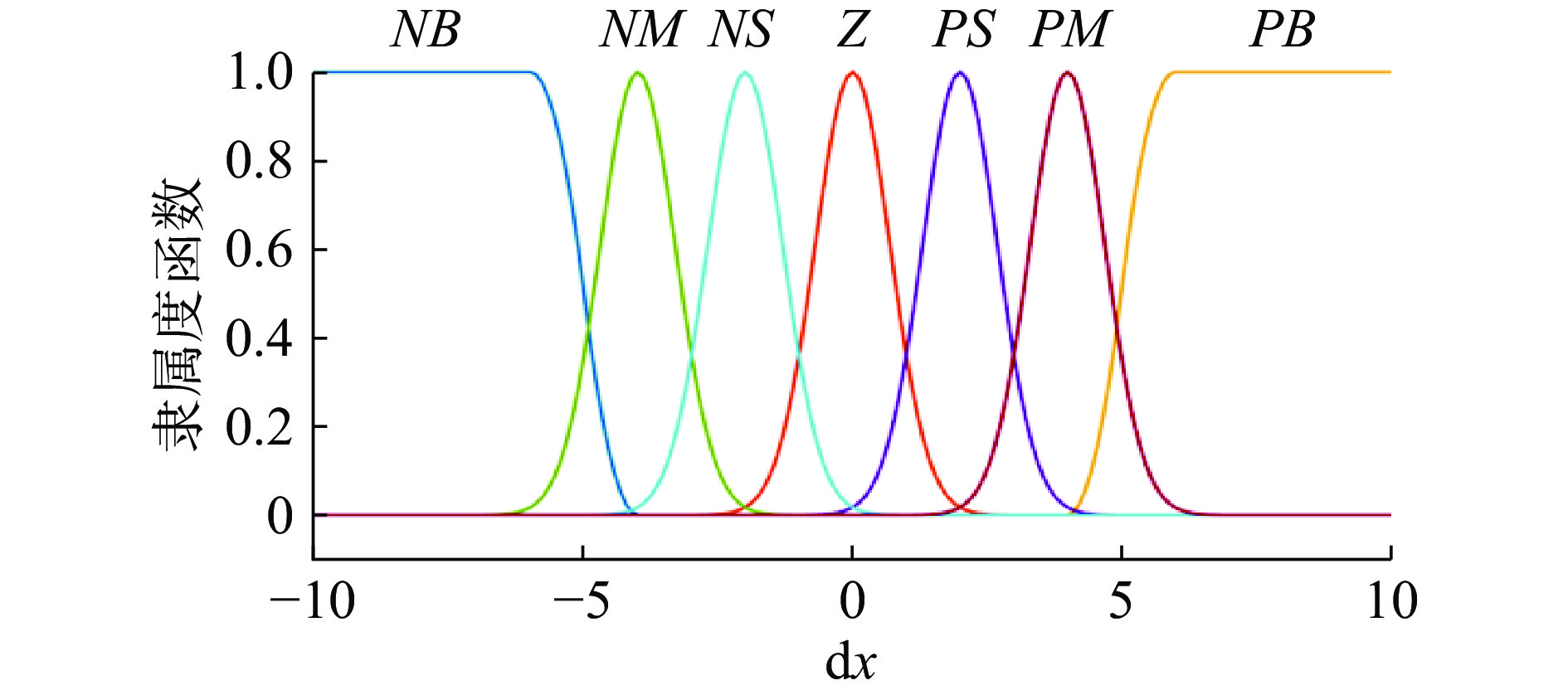
表 1 制动意图模糊推理规则表
x dx NB NM NS Z S M B VS − − S S S S − S − − S S S S M M − − M M M M B B − − B B B B B VB − − B B B B B  下载: 导出CSV
下载: 导出CSV
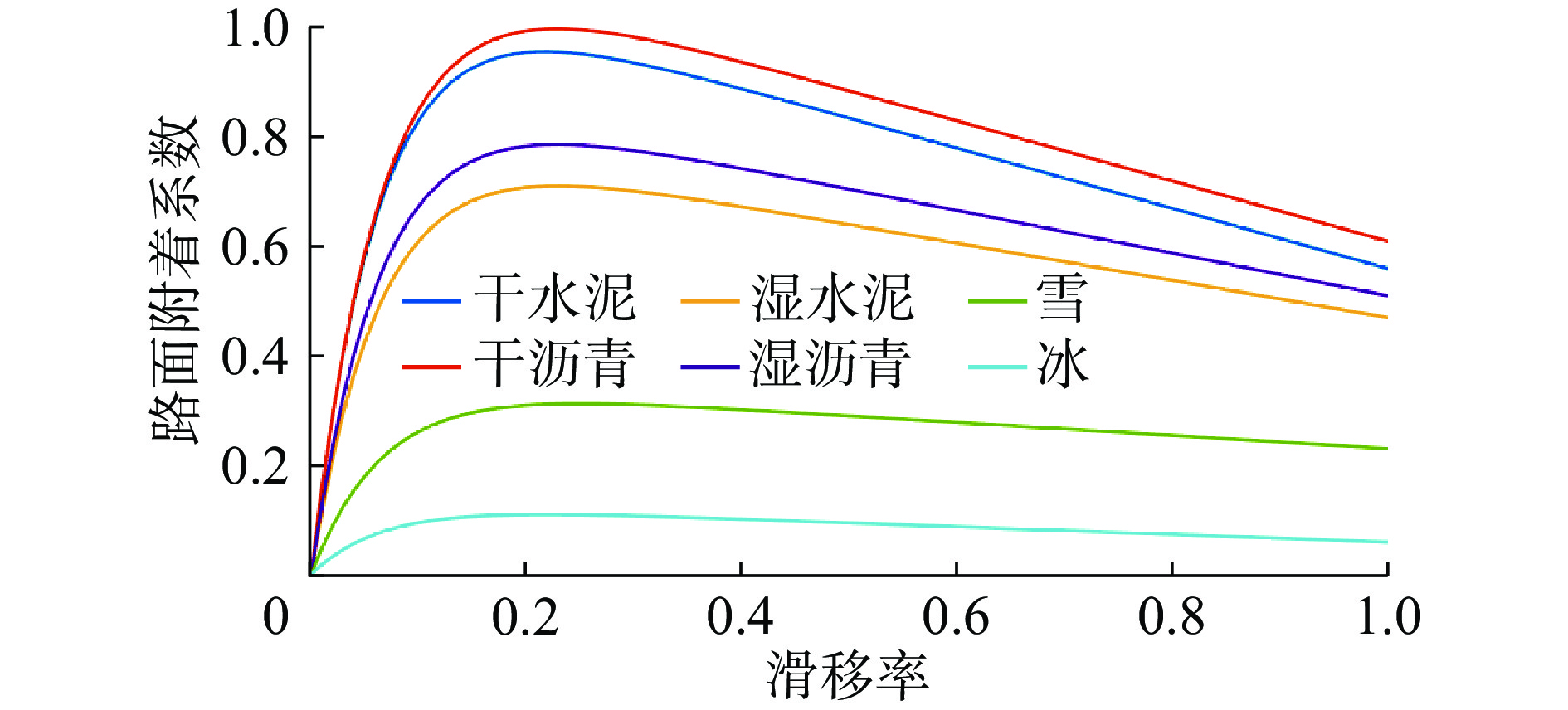
表 3 Burckhardt模型参数
路面类型 a1 a2 a3 干水泥 1.11 −15.98 0.55 干沥青 1.16 −15.16 0.55 湿水泥 0.81 −15.83 0.34 湿沥青 0.90 −15.70 0.39 雪 0.35 −15.14 0.12 冰 0.13 −15.38 0.07
下载: 导出CSV
-
[1] 郭金刚, 董昊轩. 四轮毂电机驱动电动汽车动力系统优化匹配[J]. 公路交通科技, 2019, 36(7): 150-158GUO J G, DONG H X. Optimal matching of powertrain system of four in-wheel-motor actuated electric vehicle[J]. Journal of Highway and Transportation Research and Development, 2019, 36(7): 150-158 (in Chinese) [2] 刘阳, 谢金法. 轮毂电机驱动电动汽车再生制动控制策略[J]. 中国农机化学报, 2016, 37(4): 125-129, 175LIU Y, XIE J F. Regenerative braking control strategy for hub-motor-driven electric vehicle[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(4): 125-129, 175 (in Chinese) [3] 刘新文. 分布驱动电动汽车再生制动研究[D]. 重庆: 重庆大学, 2015.LIU X W. Research on the regenerative braking control of distributed drive electric vehicle[D]. Chongqing: Chongqing University, 2015 (in Chinese). [4] 徐国栋, 余卓平, 熊璐, 等. 基于解耦式EHB的多电机再生制动策略设计[J]. 汽车技术, 2019(3): 25-30XU G D, YU Z P, XIONG L, et al. Design of regenerative braking strategy on multi-motor vehicle based on decoupling EHB[J]. Automobile Technology, 2019(3): 25-30 (in Chinese) [5] 伍令飞. 分布式电驱动车辆回馈制动控制策略研究[J]. 电工电能新技术, 2016, 35(9): 1-7 doi: 10.3969/j.issn.1003-3076.2016.09.001WU L F. Research on regenerative braking control strategy for distribute drive electric vehicle[J]. Advanced Technology of Electrical Engineering and Energy, 2016, 35(9): 1-7 (in Chinese) doi: 10.3969/j.issn.1003-3076.2016.09.001 [6] YE T. Regenerative braking system for electric vehicle with four in-wheel motors based on fuzzy control[C]//Proceedings of the 36th Chinese Control Conference. Dalian, 2017: 26-28 [7] WANG J. Strategy of regenerative braking and anti-lock braking system for electric vehicle[C]//EVS27 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium. Barcelona, 2013: 17-20 [8] 黄智奇, 姚栋伟, 杨国青, 等. 电动汽车复合能源系统再生制动分段控制策略研究[J]. 机电工程, 2016, 33(3): 280-286HUANG Z Q, YAO D W, YANG G Q, et al. Study on piecewise control strategy of braking energy regeneration for hybrid power system of electric vehicle[J]. Journal of Mechanical & Electrical Engineering, 2016, 33(3): 280-286 (in Chinese) [9] 孙晓坤. 分布式驱动电动汽车机电复合制动控制策略研究[D]. 北京: 北京理工大学, 2015.SUN X K. Study on electro-mechanical braking control strategy for a distributed driving electric vehicle[D]. Beijing: Beijing Institute of Technology, 2015 (in Chinese). [10] YAO J, CHEN G Y, ZONG C F, et al. Research on modeling of distributed compound braking system and braking force allocation strategy[C]//IEEE Intelligent Vehicles Symposium. Changshu, China: IEEE, 2018: 26-30. [11] SHI Q S. An improved electric vehicle regenerative braking strategy research[J]. The International Journal of Automotive Technology, 2010, 9(6): 637-642 [12] WANG F, YIN X M, LUO H Q, et al. A series regenerative braking control strategy based on hybrid-power[C]//International Conference on Computer Distributed Control and Intelligent Environmental Monitoring. Hunan, China: IEEE, 2012: 78-80. [13] 刘得雄. 四轮驱动电动汽车制动意图识别与主动能量回收策略的研究[D]. 重庆: 西南大学, 2016.LIU D X. Study on braking intention recognition and active energy recovery strategy of four wheel drive electric vehicle[D]. Chongqing: Southwest University, 2016 (in Chinese). [14] 刘剑开, 张向文. 电动汽车再生制动过程制动踏板位移与制动意图及制动强度之间的关系[J]. 科学技术与工程, 2017, 18(12): 317-325LIU J K, ZHANG X W. Relationship among braking pedal displacement, braking intensity and braking strength in regenerative braking process of electric vehicle[J]. Science Technology and Engineering, 2017, 18(12): 317-325 (in Chinese) [15] 范兴根. 基于HMM的前方道路-轮胎附着特性预测研究[D]. 镇江: 江苏大学, 2018.FAN X G. Prediction of road-tire adhesion characteristics based on HMM[D]. Zhenjiang: Jiangsu University, 2018 (in Chinese). [16] LI Z, ZHENG L, REN Y, et al. A Control strategy of regenerative braking system for intelligent vehicle[C]//IET International Conference on Intelligent and Connected Vehicles (ICV 2016). Chongqing, China: IEEE, 2016: 65-70 [17] 李玉芳, 林逸, 何洪文, 等. 电动汽车再生制动控制算法研究[J]. 汽车工程, 2007, 29(11): 1059-1073LI Y F, LIN Y, HE H W, et al. A study on control algorithm of regenerative braking for EV/HEV[J]. Automotive Engineering, 2007, 29(11): 1059-1073 (in Chinese) [18] 单鹏, 黄亮, 李刚. 四轮独立驱动轮毂电机电动汽车再生制动研究[J]. 机械设计与制造, 2017, 2(2): 18-21 doi: 10.3969/j.issn.1001-3997.2017.02.005SHAN P, HUANG L, LI G. Study on regenerative braking for four wheel independent drive in-wheel-motor electric vehicle[J]. Machinery Design & Manufacture, 2017, 2(2): 18-21 (in Chinese) doi: 10.3969/j.issn.1001-3997.2017.02.005 [19] ZHANG X D, GOHLICH D. A novel driving and regenerative braking regulation design based on distributed drive electric vehicles[C]//2016 IEEE Vehicle Power and Propulsion Conference (VPPC). Hangzhou, China: IEEE, 2016. -








 点击查看大图
点击查看大图
图(25) / 表(4)
计量
- 文章访问数: 228
- HTML全文浏览量: 276
- PDF下载量: 49
- 被引次数: 0
