




Applying Genetic Algorithmto Multi-objective Optimization of Size of Bionic Robot Finger
-
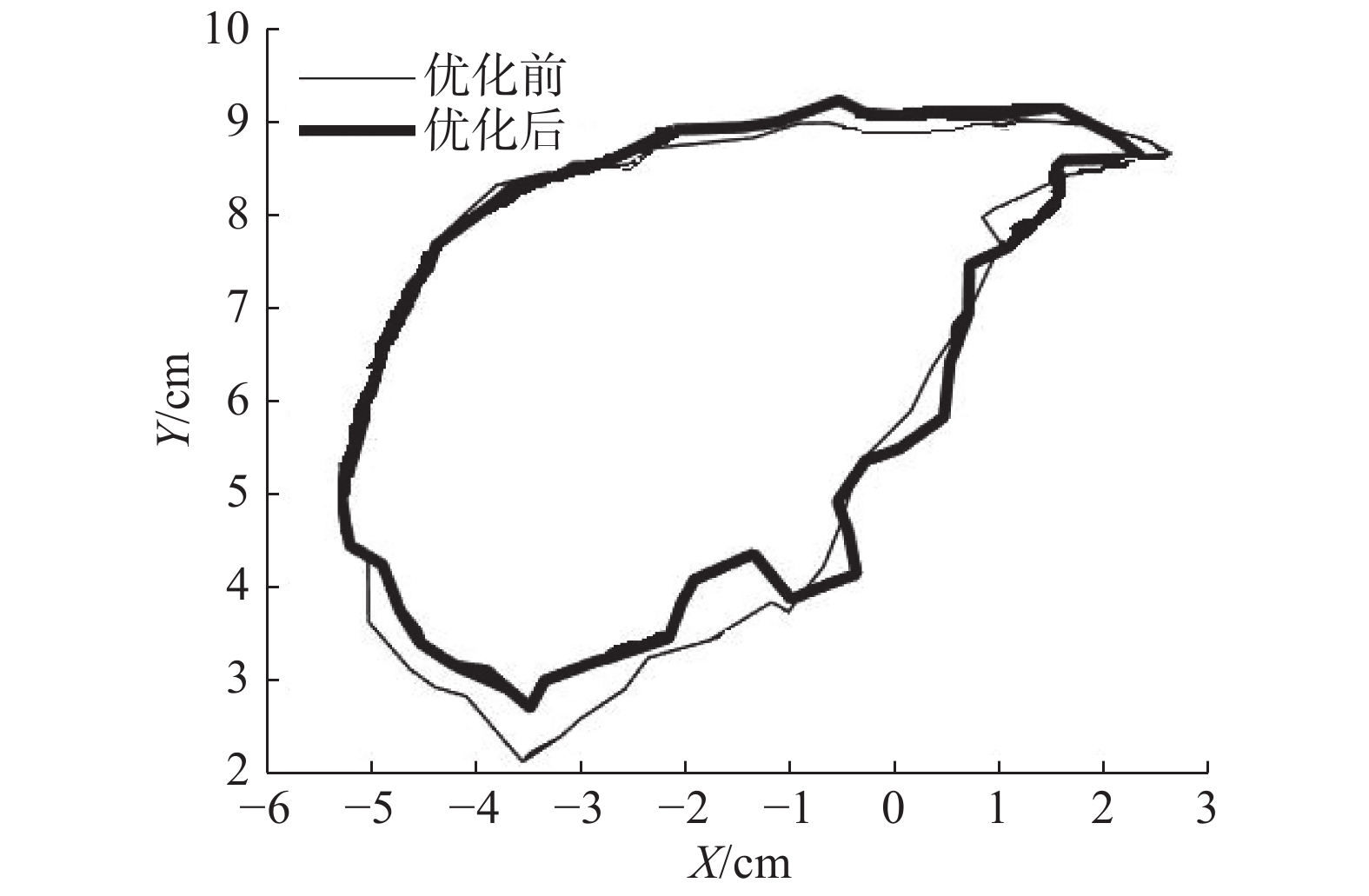
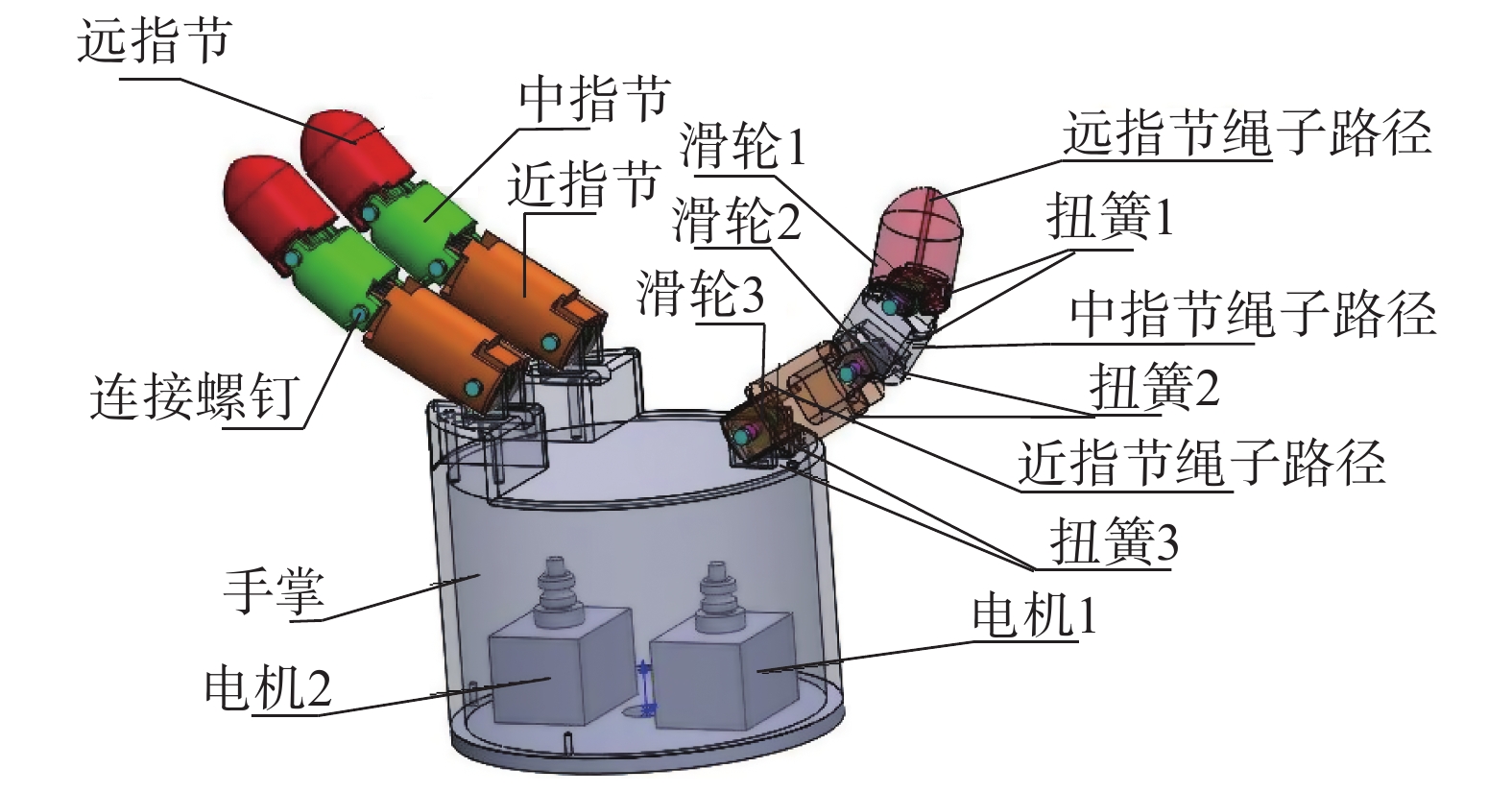
摘要: 为使仿生机械手指在达到约束条件的情况下满足设计的尺寸范围,让仿生机械手实现稳定、精确的抓取目标物体。首先,通过力平衡、力矩平衡原理建立仿生机械手指关节的接触力模型;然后,根据抓取要求建立目标函数进而构建合理的的适应度函数;在此基础上,结合约束条件,利用遗传算法得到优化后的仿生机械手指的尺寸参数;最后通过MATLAB软件对仿生机械手指仿真。仿真结果表明优化后的仿生机械手的抓取效果比优化前的抓取效果显著Abstract: In order to make the bionic manipulator finger satisfy the designed size range under the constraints, the bionic manipulator can grasp the target object stably and accurately. Firstly, the contact force model of the bionic mechanical finger joint is established with the force and moment balance principles. Then, the objective function is established according to the grasping requirement, and a reasonable fitness function is constructed. With these functions, combined with the constraints, the size parameters of the optimized bionic mechanical finger are obtained with the genetic algorithm. Finally, the bionic mechanical finger is simulated with the MATLAB software. The simulation results show that the grasping effect of the optimized bionic manipulator is better than that of the optimized manipulator.
-
Key words:
- bionic mechanical finger /
- multiple targets /
- genetic algorithm /
- size optimization
-
表 1 手指设计变量的尺寸范围
尺寸变量 尺寸下限 尺寸上限 ${L_1}$ 45 mm 58 mm ${L_2}$ 25 mm 40 mm ${L_3}$ 15 mm 25 mm ${ {{R} }_1}$ 6 mm 10 mm ${ {{R} }_2}$ 6 mm 10 mm ${ {{R} }_3}$ 6 mm 10 mm ${D_1}$ 10 mm 15 mm ${D_2}$ 10 mm 15 mm ${D_3}$ 10 mm 15 mm ${\alpha _1}$ 0 π/2 ${\alpha _2}$ π/4 π/2 ${\alpha _3}$ π/4 π/2  下载: 导出CSV
下载: 导出CSV
表 2 尺寸优化结果
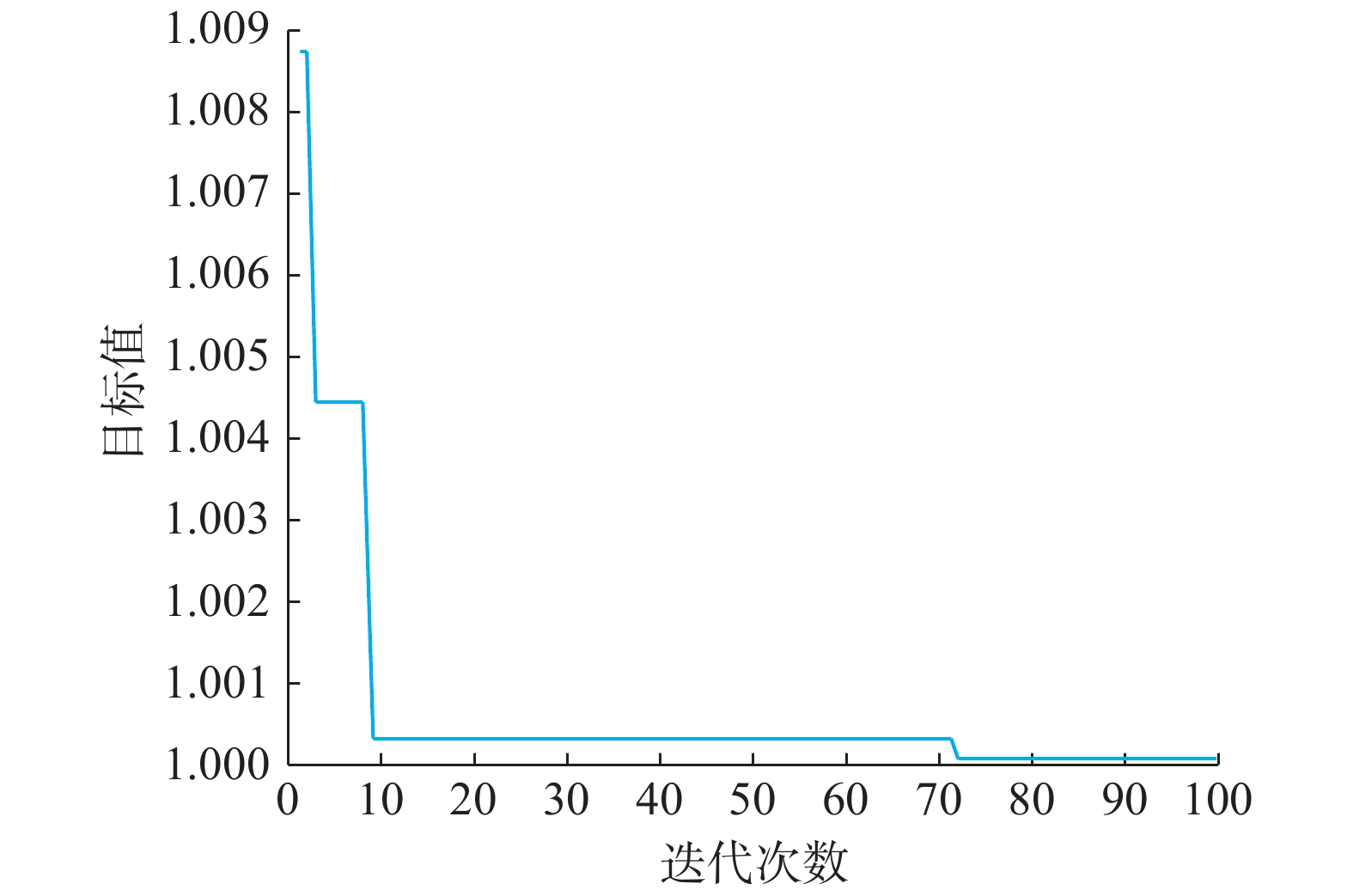
${L_1}$ 48.7 mm ${ {{D} }_2}$ 11.7 mm ${L_2}$ 30.5 mm ${ {{D} }_3}$ 10.1 mm ${L_3}$ 23.5 mm ${\alpha _1}$ 1.1 rad ${ {{R} }_1}$ 7.3 mm ${\alpha _2}$ 1.1 rad ${ {{R} }_2}$ 7.5 mm ${\alpha _3}$ 0.9 rad ${ {{R} }_3}$ 7.5 mm 适应度函数值 1 ${ {{D} }_1}$ 11.5 mm
下载: 导出CSV
-
[1] 张玉茹, 李继婷, 李剑锋. 机器人灵巧手: 建模、规划与仿真[M]. 北京: 机械工业出版社, 2007: 1-20Zhang Y R, Li J T, Li J F. Robot dexterous hand: modeling, planning and simulation[M]. Beijing: Machinery Industry Press, 2007: 1-20 (in Chinese) [2] 林焕辉, 陈德为. 基于力反馈数据手套控制的仿生机械手设计研究[J]. 机电技术, 2018,(1): 7-9Lin H H, Chen D W. Design and research of bionic manipulator based on force feedback data glove control[J]. Mechanical & Electrical Technology, 2018,(1): 7-9 (in Chinese [3] 韦攀东, 李鹏飞, 王晓华, 等. 抓取柔软织物多指灵巧手的建模与仿真[J]. 西安工程大学学报, 2016, 30(3): 300-305Wei P D, Li P F, Wang X H, et al. Modeling and simulation of multi-fingered dexterous hand grasping flexible fabric[J]. Journal of Xi′an Polytechnic University, 2016, 30(3): 300-305 (in Chinese [4] 田方, 赵博. 基于运动学性能指标的机械手参数优化研究[J]. 机械工程与自动化, 2018,(4): 94-95, 98 doi: 10.3969/j.issn.1672-6413.2018.04.038Tian F, Zhao B. Manipulator parameter optimization and research based on kinematic performance index[J]. Mechanical Engineering & Automation, 2018,(4): 94-95, 98 (in Chinese doi: 10.3969/j.issn.1672-6413.2018.04.038 [5] Qiao S L, Guo H W, Liu R Q, et al. Analysis of the influence of parameters change on effective grasping force of an underactuated robotic hand[C]//Proceedings of 2016 IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2017: 55-63. [6] 丁锐, 曹毅. 基于多目标优化算法的并联机构综合设计[J]. 机械制造与自动化, 2018, 47(5): 20-23Ding R, Cao Y. Integrated design of parallel mechanism based on multi-objective optimization[J]. Machine Building & Automation, 2018, 47(5): 20-23 (in Chinese [7] 钱亚平, 张瑜, 顾寄南. 基于遗传算法的推料机齿轮传动多目标优化设计[J]. 机电工程, 2018, 35(8): 805-810 doi: 10.3969/j.issn.1001-4551.2018.08.005Qian Y P, Zhang Y, Gu J N. Multi-objective optimization of gear transmission applied in pushing mechanism based on genetic algorithm[J]. Journal of Mechanical & Electrical Engineering, 2018, 35(8): 805-810 (in Chinese doi: 10.3969/j.issn.1001-4551.2018.08.005 [8] 王杰, 管声启, 夏齐霄. 手指康复外骨骼机器人的结构优化设计[J]. 中国机械工程, 2018, 29(2): 224-229 doi: 10.3969/j.issn.1004-132X.2018.02.015Wang J, Guan S Q, Xia Q X. Structural design of finger rehabilitation exoskeleton robots[J]. China Mechanical Engineering, 2018, 29(2): 224-229 (in Chinese doi: 10.3969/j.issn.1004-132X.2018.02.015 [9] 朱华炳, 程翔宇, 唐自玉, 等. 多目标遗传算法适应度函数权重设置的改进[J]. 组合机床与自动化加工技术, 2007,(4): 11-14 doi: 10.3969/j.issn.1001-2265.2007.04.003Zhu H B, Cheng X Y, Tang Z Y, et al. Improvement of moderate weight to fitness function of multi-objective genetic algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2007,(4): 11-14 (in Chinese doi: 10.3969/j.issn.1001-2265.2007.04.003 [10] 孙昌安. 一种带关节手指的仿生模拟与优化设计[J]. 机械, 1994, 21(1): 27-31Sun C A. Bionic simulation and optimal design of a joint finger[J]. Machinery, 1994, 21(1): 27-31 (in Chinese [11] Dorigo M, Stutzle T. Ant Colony Optimization[M]. USA Massachusetts: MIT Press [12] 李晓磊. 一种新型的智能优化方法-人工鱼群算法[D]. 杭州: 浙江大学, 2003Li X L. A new intelligent optimization method artificial fish swarm algorithm [D]. Hangzhou: Zhejiang University, 2003 (in Chinese) [13] 王亚良, 钱其晶, 曹海涛, 等. 基于动态差分元胞多目标遗传算法的混合作业车间布局改善与优化[J]. 中国机械工程, 2018, 29(14): 1751-1757 doi: 10.3969/j.issn.1004-132X.2018.14.016Wang Y L, Qian Q J, Cao H T, et al. Improvement and optimization of hybrid workshop layouts based on dynamic differential cellular multi-objective genetic algorithm[J]. China Mechanical Engineering, 2018, 29(14): 1751-1757 (in Chinese doi: 10.3969/j.issn.1004-132X.2018.14.016 [14] 荣誉, 刘双勇, 王洪斌, 等. 一种3-DOF并联机械手的研制[J]. 中国机械工程, 2018, 29(3): 253-261 doi: 10.3969/j.issn.1004-132X.2018.03.001Rong Y, Liu S Y, Wang H B, et al. Development of a 3-DOF parallel manipulator[J]. China Mechanical Engineering, 2018, 29(3): 253-261 (in Chinese doi: 10.3969/j.issn.1004-132X.2018.03.001 [15] Qian C H, Li X, Zhu J F, et al. A bionic manipulator based on multi-sensor data fusion[J]. Integrated Ferroelectrics, 2018, 192(1): 10-15 doi: 10.1080/10584587.2018.1521666 [16] 席浩洋, 王挺, 姚辰, 等. 基于电机驱动的仿生柔性机械手研究[J]. 高技术通讯, 2019, 29(4): 362-370 doi: 10.3772/j.issn.1002-0470.2019.04.007Xi H Y, Wang T, Yao C, et al. Research on bionic soft gripper drived by motor[J]. Chinese High Technology Letters, 2019, 29(4): 362-370 (in Chinese doi: 10.3772/j.issn.1002-0470.2019.04.007 [17] 李满宏, 马艳悦, 张明路. 仿生柔性关节关键技术综述[J]. 机械设计, 2018, 35(11): 1-9Li M H, Ma Y Y, Zhang M L. Review on the key technology of bionic flexible joint[J]. Journal of Machine Design, 2018, 35(11): 1-9 (in Chinese -


 点击查看大图
点击查看大图
图(8) / 表(2)
计量
- 文章访问数: 202
- HTML全文浏览量: 88
- PDF下载量: 26
- 被引次数: 0
