




Controlling Constant Force of Robot using Single Neuron Adaptive PID
-
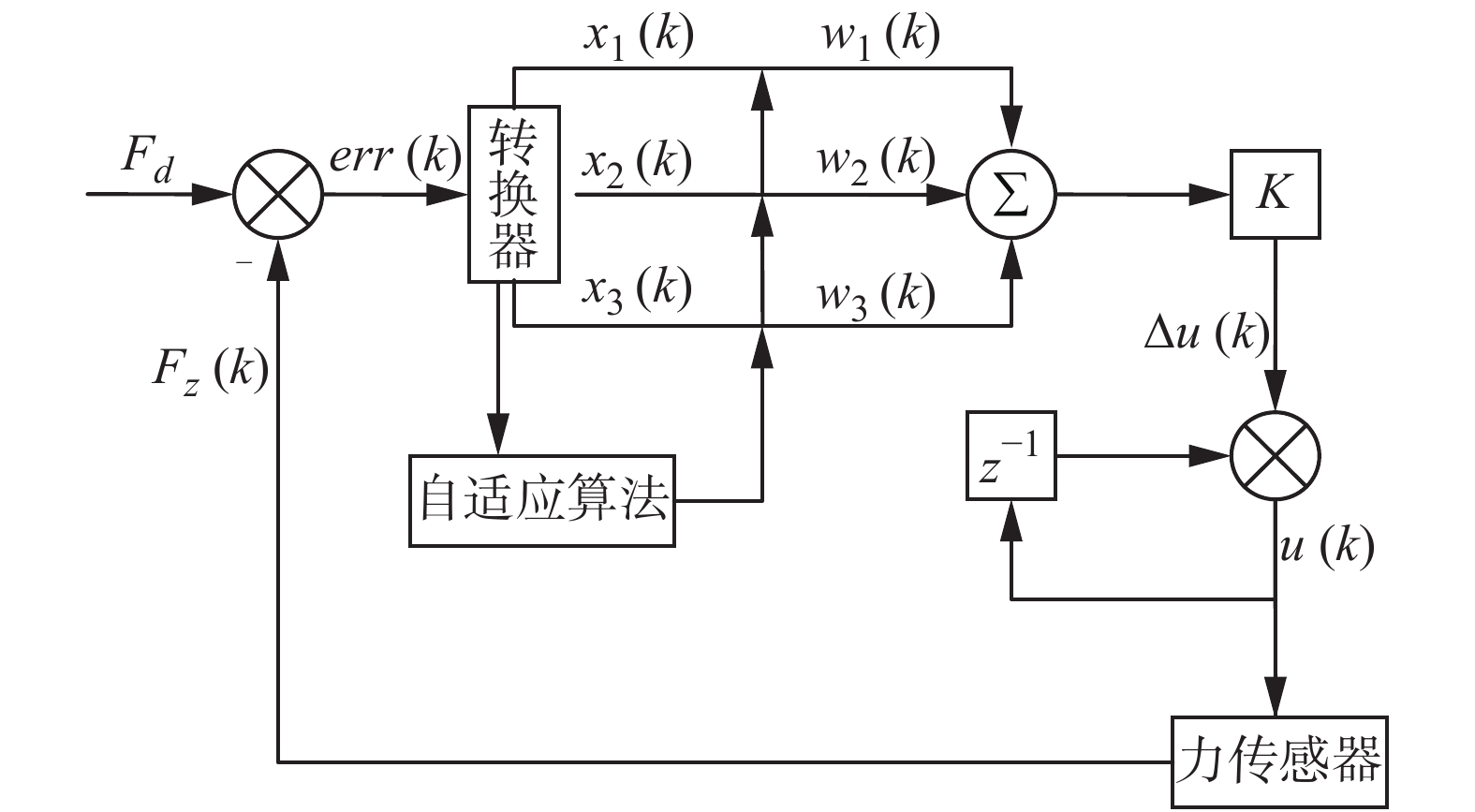
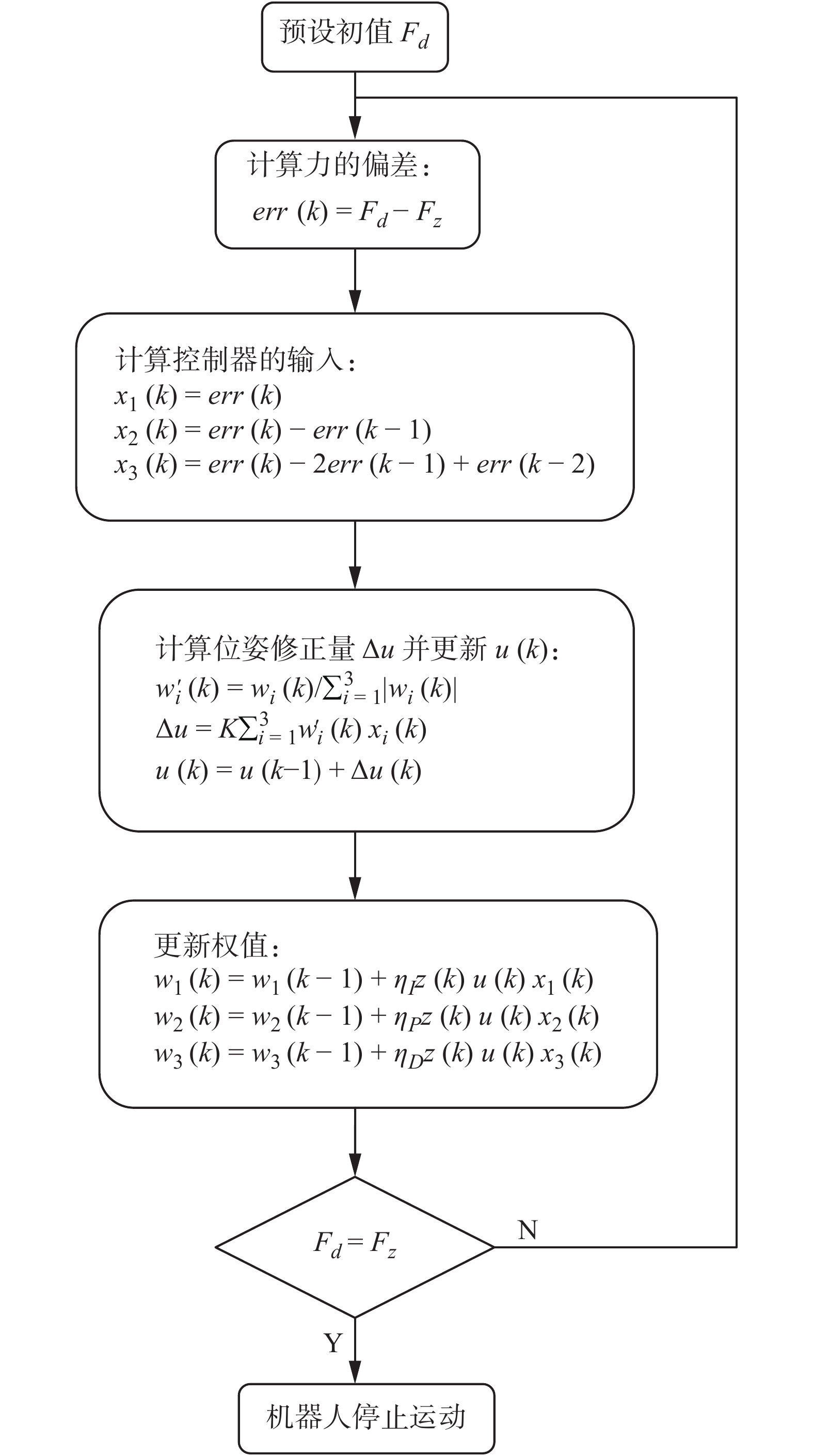
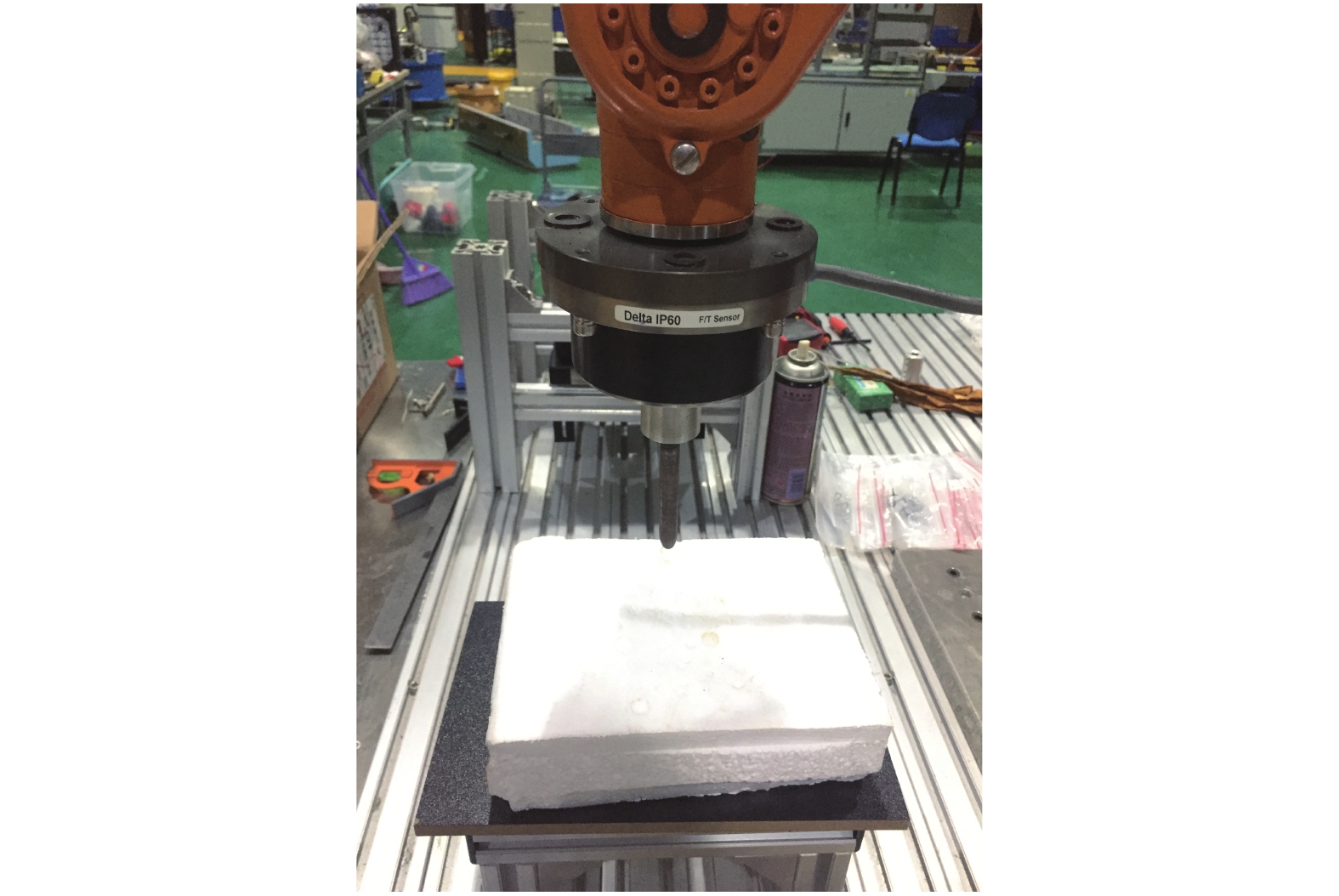
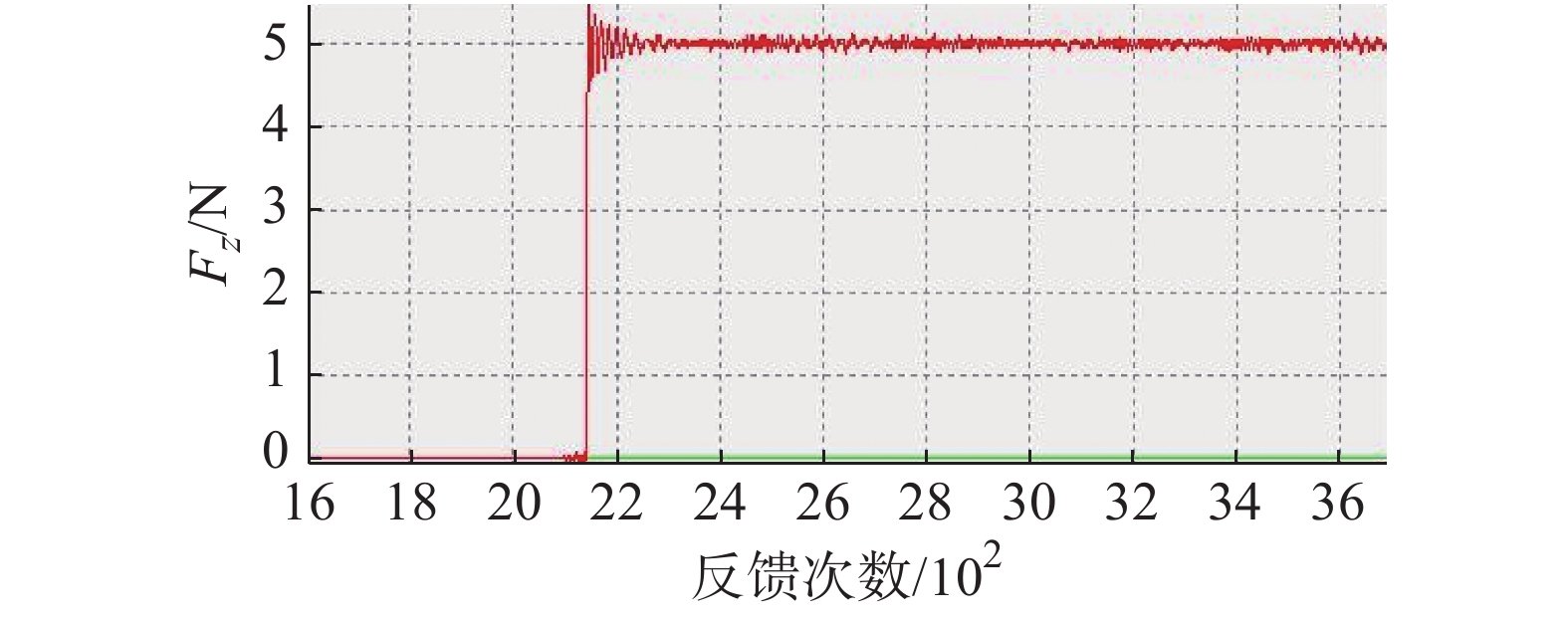
摘要: 针对传统基于位置控制的机器人因末端执行器缺少力负反馈环节,难以实现对接触力精确控制问题,建立了一种基于Windows 平台和RSI(Robot sensor interface)应用程序包的工业机器人开放式控制系统,在此基础上提出单神经元自适应PID的机器人恒力控制自适应算法。通过在KUKA工业机器人平台实验验证,该力控算法可在未知环境参数情况下实现机器人末端执行器与工件之间恒力接触,并且易于实现;最后通过实验提出了基于所搭建实验平台的单神经元系数K自调整的单神经元自适应PID的机器人恒力控制算法,进一步提高了控制器的自适应性和鲁棒性。
-
关键词:
- 力负反馈 /
- 工业机器人 /
- 单神经元自适应PID /
- 恒力控制
Abstract: A traditional robot that uses position control has difficultyin precisely controlling the contact force because the end-effector lacks the closed-loop control system formed by the negative feedback link of force. Therefore, an open industrial robot control system based on Windows platform and RSI (Robot Sensor Interface) application package is established. On this basis, a single neuron adaptive PID adaptive algorithm for controlling theconstant forceof the robot is proposed. Experiments on KUKA industrial robot platform show that the force control algorithm can realize the constant force contact between the end-effector and the workpiece under unknown environmental parameters, thusbeing easy to implement. Finally, the constant force control algorithm based on the coefficient K self-adjusting single neuron adaptive PID is proposed.Experiments on it are carried out. The proposed algorithm further improves the adaptability and robustness of the control system.-
Key words:
- robot /
- closed-loop control systems /
- feedback /
- single neuron adaptive PID
-
[1] 刘涛雄, 刘骏. 人工智能、机器人与经济发展研究进展综述[J]. 经济社会体制比较, 2018, (6): 172-178Liu T X, Liu J. A literature review on artificial intelligence, robotics and economic development[J]. Comparative Economic and Social Systems, 2018, (6): 172-178 (in Chinese [2] 吕冬冬, 郑松. 工业机器人开放式控制系统研究综述[J]. 电气自动化, 2017, 39(1): 88-91 doi: 10.3969/j.issn.1000-3886.2017.01.026Lü D D, Zheng S. A summary of researches on open-architecture control systems for industrial robots[J]. Electrical Automation, 2017, 39(1): 88-91 (in Chinese doi: 10.3969/j.issn.1000-3886.2017.01.026 [3] 章健. 基于恒力控制的机器人去毛刺轨迹动态规划[D]. 杭州: 浙江大学, 2016.Zhang J. Research on robot deburring path generation through constant force control[D]. Hangzhou: Zhejiang University, 2016 (in Chinese). [4] 秦振江, 赵吉宾, 李论, 等. 砂带抛光机器人力/位混合主动柔顺控制研究[J]. 制造业自动化, 2019, 41(4): 122-126 doi: 10.3969/j.issn.1009-0134.2019.04.029Qin Z J, Zhao J B, Li L, et al. Research on belt polishing combined with robot force/position hybrid active compliance control[J]. Manufacturing Automation, 2019, 41(4): 122-126 (in Chinese doi: 10.3969/j.issn.1009-0134.2019.04.029 [5] 吴炳龙, 曲道奎, 徐方. 基于位置控制的工业机器人力跟踪刚度控制[J]. 机械设计与制造, 2019, (1): 219-222.Wu B L, Qu D K, Xu F. Force tracking stiffness control for the position-based industrial robot[J]. Machinery Design & Manufacture, 2019, (1): 219-222 (in Chinese). [6] Pliego-Jiménez J, Arteaga-Pérez M A. Adaptive position/force control for robot manipulators in contact with a rigid surface with uncertain parameters[J]. European Journal of Control, 2015, 22: 1-12 doi: 10.1016/j.ejcon.2015.01.003 [7] 龙雪飞, 陈涛, 张磊. 嵌入式测试系统中UDP/IP协议栈的移植与实现[J]. 航天控制, 2015, 33(3): 83-87 doi: 10.3969/j.issn.1006-3242.2015.03.016Long F X, Chen T, Zhang L. Transplant and implementation of UDP/IP protocol stack in embedded test system[J]. Aerospace Control, 2015, 33(3): 83-87 (in Chinese doi: 10.3969/j.issn.1006-3242.2015.03.016 [8] 郑天宇, 尹达一. 千兆UDP/IP协议栈FPGA实现及其在高速成像系统中的应用[J]. 现代电子技术, 2018, 41(18): 1-5, 11Zheng T Y, Yin D Y. Implementation of gigabit UDP/IP protocol stack in FPGA and its application in high-speed imaging system[J]. Modern Electronics Technique, 2018, 41(18): 1-5, 11 (in Chinese [9] 杨秋黎, 金智. Windows网络编程[M]. 2版. 北京: 人民邮电出版社, 2015.Yang Q L, Jin Z. Windows network programming[M]. 2nd ed. Beijing: Posts and Telecommunications Press, 2015 (in Chinese). [10] 邓潇, 郑松, 张望. 单神经PID控制器的工业通用控制平台仿真[J]. 控制工程, 2017, 24(S1): 98-102Deng X, Zheng S, Zhang W. Simulation of single neuron PID controller based on industry automation platform[J]. Control Engineering of China, 2017, 24(S1): 98-102 (in Chinese [11] 刘金琨.先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2004.Liu J K. Matlab simulation of advanced PID control[M]. Beijing: Publishing House of Electronics Industry, 2004 (in Chinese) [12] 赵垒. 基于单神经元的船舶航向保持自适应PID控制[D]. 广州: 华南理工大学, 2018.Zhao L. Ship course-keeping adaptive PID control based on single neuron[D]. Guangzhou: South China University of Technology, 2018 (in Chinese). [13] 尤向阳. 超声马达单神经元自适应PID控制[J]. 微电机, 2019, 52(4): 48-51 doi: 10.3969/j.issn.1001-6848.2019.04.010You X Y. Single neuron adaptive PID control of ultrasonic motor[J]. Micromotors, 2019, 52(4): 48-51 (in Chinese doi: 10.3969/j.issn.1001-6848.2019.04.010 [14] 迟晓妮, 何俊杰. 基于单神经元自适应PID的注射机料筒温度控制[J]. 塑料科技, 2019, 47(1): 111-114Chi X N, He J J. Temperature control of injection molding machine barrel based on single neuron adaptive PID[J]. Plastics Science and Technology, 2019, 47(1): 111-114 (in Chinese [15] 汪亮培, 彭天好. 基于单神经元PID控制的电液比例调高系统研究[J]. 煤炭工程, 2019, 51(1): 130-134Wang L P, Peng T H. Research on electro-hydraulic proportional height-adjusting system based on single neuron PID control[J]. Coal Engineering, 2019, 51(1): 130-134 (in Chinese -

 下载:
下载:









 点击查看大图
点击查看大图
图(21) / 表(1)
计量
- 文章访问数: 239
- HTML全文浏览量: 121
- PDF下载量: 28
- 被引次数: 0
