




Design and Implementation of Robot Collision Observer
-
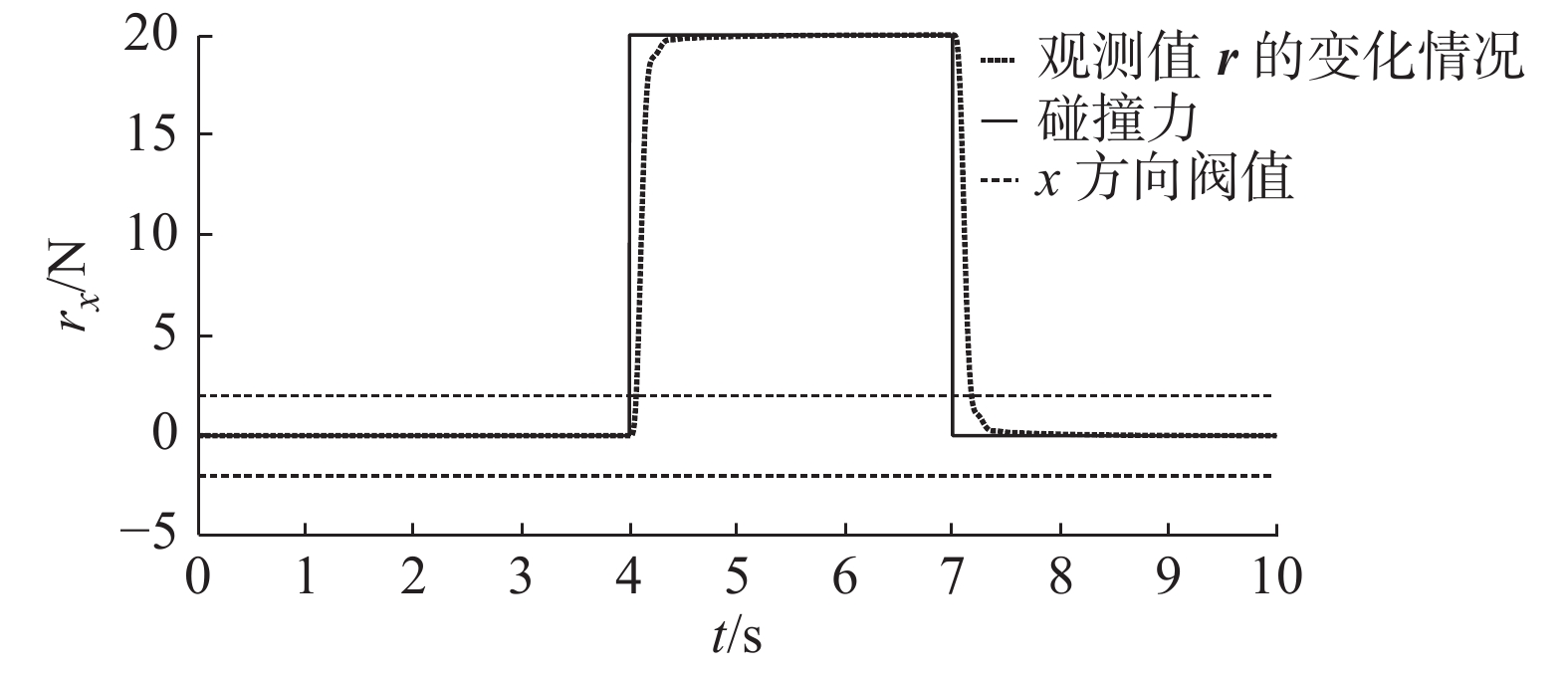
摘要: 为了检测机器人与周围环境的碰撞,采用基于动力学模型的广义动量与实际动量偏差设计碰撞观测器以检测碰撞力。该观测器可在不增加额外传感器、加速度信息的情况下,仅通过机器人动力学模型、电机编码器反馈的位置、速度与驱动器反馈的驱动力矩计算机器人在当前运动状态下的理论动量与实际动量的偏差间接获取碰撞力的大小与方向,通过合理设定安全阈值就可以实现机器人的碰撞检测。仿真和实验表明,该碰撞观测器可以有效地获取碰撞力信息,并对高频噪声不敏感,参数调节方便,适用于静态与动态两种情况的碰撞检测。提高机器人动力学模型参数与关节摩擦力系数可提高观测器检测碰撞力信息的精度,减小安全阈值,提高碰撞检测的灵敏度。Abstract: In order to detect the collision between the robot and its surroundings, the collision observer is designed based on the deviation between the generalized momentum of the dynamic model and the actual momentum to detect the collision force. The observer can calculate the theoretical and actual kinetic energy of the robot under the current motion state only using the robot dynamics model, the position and speed of the motor encoder feedback, and the driving torque fed back by the driver without adding additional sensors and acceleration information. The momentum deviation indirectly reflects the magnitude and direction of the collision force, and the collision detection of the robot can be realized by appropriately setting the safety threshold. Simulation and experiments show that the collision detection algorithm can effectively acquire the collision force information, is insensitive to high frequency noise, and has convenient parameter adjustment. It is suitable for collision detection in both static and dynamic situations. Improving the robot dynamics model parameters and the joint friction coefficient can further improve the observer's detection accuracy of collision force information, reduce the safety threshold, and improve the sensitivity of collision detection.
-
Key words:
- robot /
- dynamic model /
- collision detection /
- observe
-
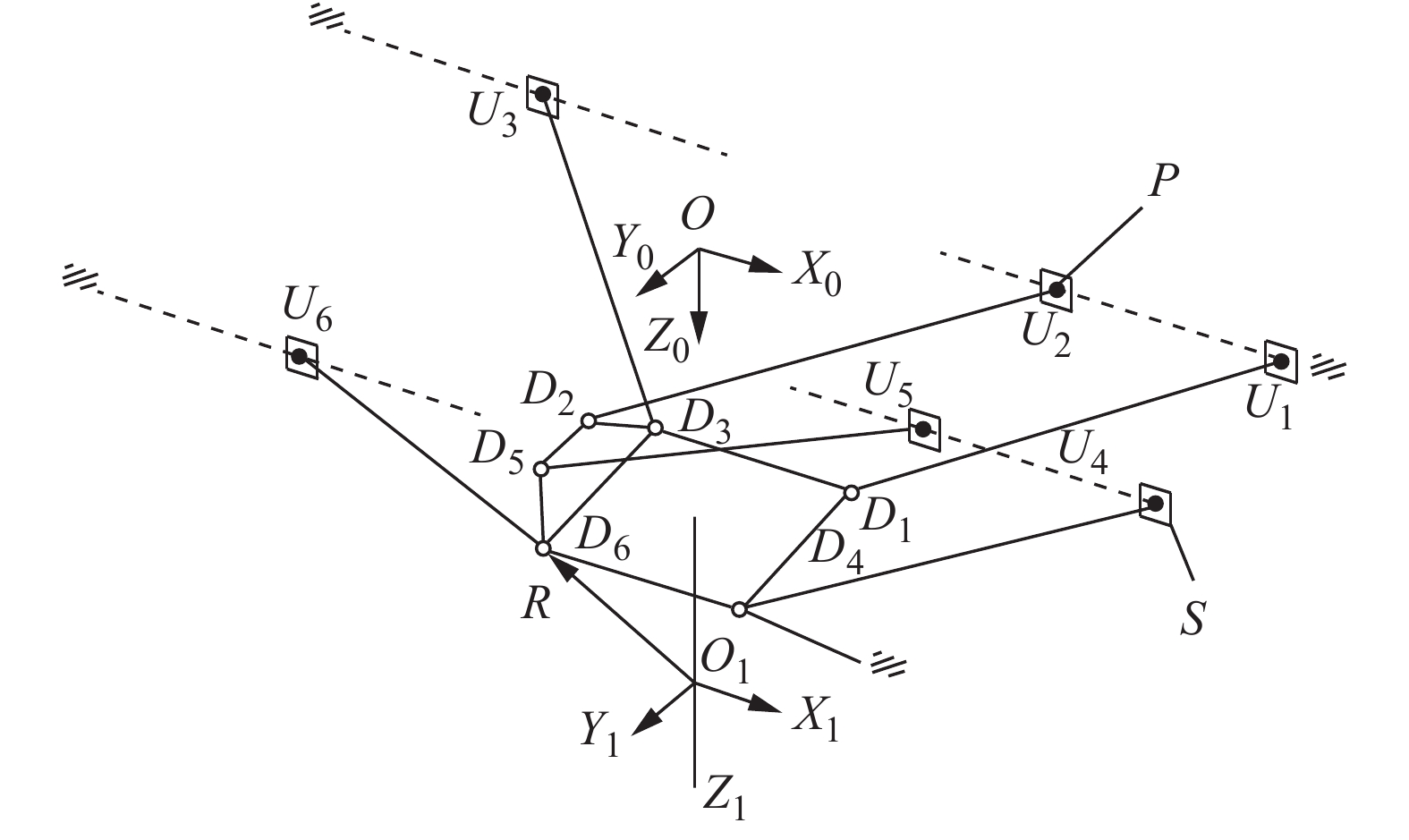
表 1 机器人机构参数
连杆 长度/mm 连杆 长度/mm 连杆${ {U_1 - D_1} }$ 866.02 连杆${ {U_2 - D_2} }$ 866.02 连杆${ {U_3 - D_3} }$ 686.01 连杆${ {U_4 - D_4} }$ 866.03 连杆${ {U_5 - D_5} }$ 866.04 连杆${ {U_6 - D_6} }$ 686.01 尾支杆 784.11  下载: 导出CSV
下载: 导出CSV
-
[1] Hoffmann A, Poeppel A, Schierl A, et al. Environment-aware proximity detection with capacitive sensors for human-robot-interaction[C]//Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, South Korea: IEEE, 2016 [2] Ye Y, Deng J H, Shen S M, et al. A novel method for proximity detection of moving targets using a large-scale planar capacitive sensor system[J]. Sensors, 2016, 16(5): 699 doi: 10.3390/s16050699 [3] Navarro S E, Hein B, Wörn H. Capacitive tactile proximity sensing: from signal processing to applications in manipulation and safe human-robot interaction[M]//Verl A, Albu-Schäffer A, Brock O, et al. Soft Robotics: Transferring Theory to Application. Berlin, Heidelberg: Springer, 2015 [4] 张立建, 胡瑞钦, 易旺民. 基于六维力传感器的工业机器人末端负载受力感知研究[J]. 自动化学报, 2017, 43(3): 439-447Zhang L J, Hu R Q, YI W M. Research on force sensing for the end-load of industrial robot based on a 6-axis force/torque sensor[J]. Acta Automatica Sinica, 2017, 43(3): 439-447 (in Chinese [5] Li Y J, Wang G C, Yang X, et al. Research on static decoupling algorithm for piezoelectric six axis force/torque sensor based on LSSVR fusion algorithm[J]. Mechanical Systems and Signal Processing, 2018, 110: 509-520 doi: 10.1016/j.ymssp.2018.03.015 [6] Hwang B, Jeon D. A method to accurately estimate the muscular torques of human wearing exoskeletons by torque sensors[J]. Sensors, 2015, 15(4): 8337-8357 doi: 10.3390/s150408337 [7] Ahmed J, Zhao L F, Bigras P, et al. Use of a force-torque sensor for self-calibration of a 6-dof medical robot[J]. Sensors, 2016, 16(6): 798 doi: 10.3390/s16060798 [8] Oh H S, Kim U, Kang G, et al. Multi-axial force/torque sensor calibration method based on deep-learning[J]. IEEE Sensors Journal, 2018, 18(13): 5485-5496 doi: 10.1109/JSEN.2018.2834727 [9] Hur S M, Oh S R, Oh Y. Joint space torque controller based on time-delay control with collision detection[C]//Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, USA: IEEE, 2014: 4710-4715 [10] Lee S D, Kim Y L, Song J B. Novel collision detection index based on joint torque sensors for a redundant manipulator[C]//Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2014 [11] 潘海鸿, 戴骏, 陈琳, 等. 多机器人并行动态包围体层次树碰撞检测算法[J]. 计算机辅助设计与图形学学报, 2014, 26(11): 1948-1956Pan H H, Dai J, Chen L, et al. Multi-robot parallel dynamic bounding volume hierarchy tree collision detection algorithm[J]. Journal of Computer-Aided Design & Computer, 2014, 26(11): 1948-1956 (in Chinese [12] 赵亮, 张义德, 胡旭晓. 基于网格包络的工业机器人仿真碰撞检测算法[J]. 中国机械工程, 2017, 28(3): 316-321 doi: 10.3969/j.issn.1004-132X.2017.03.011Zhao L, Zhang Y D, Hu X X. A novel collision detection algorithm based on grids enveloping for industrial robot simulations[J]. China Mechanical Engineering, 2017, 28(3): 316-321 (in Chinese doi: 10.3969/j.issn.1004-132X.2017.03.011 [13] Lee S D, Song J B. Sensorless collision detection based on friction model for a robot manipulator[J]. International Journal of Precision Engineering and Manufacturing, 2016, 17(1): 11-17 doi: 10.1007/s12541-016-0002-3 [14] Tian Y Z, Chen Z, Jia T G, et al. Sensorless collision detection and contact force estimation for collaborative robots based on torque observer[C]//Proceedings of 2016 IEEE International Conference on Robotics and Biomimetics. Qingdao, China: IEEE, 2017 [15] Lee S D, Kim M C, Song J B. Sensorless collision detection for safe human-robot collaboration[C]//Proceedings of 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015 [16] Meguenani A, Padois V, da Silva J, et al. Energy based control for safe human-robot physical interaction[C]//Proceedings of 2016 International Symposium on Experimental Robotics. Cham: Springer, 2016 [17] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 2版. 北京: 高等教育出版社, 2014Huang Z, Zhao Y S, Zhao T S. Advanced spatial mechanism[M]. 2nd ed. Beijing: Higher Education Press, 2014 (in Chinese) -














 点击查看大图
点击查看大图
图(15) / 表(2)
计量
- 文章访问数: 407
- HTML全文浏览量: 96
- PDF下载量: 54
- 被引次数: 0
