




Adaptive Iterative Learning Control of SCARA Manipulator with Improved Wolf Pack Algorithm
-
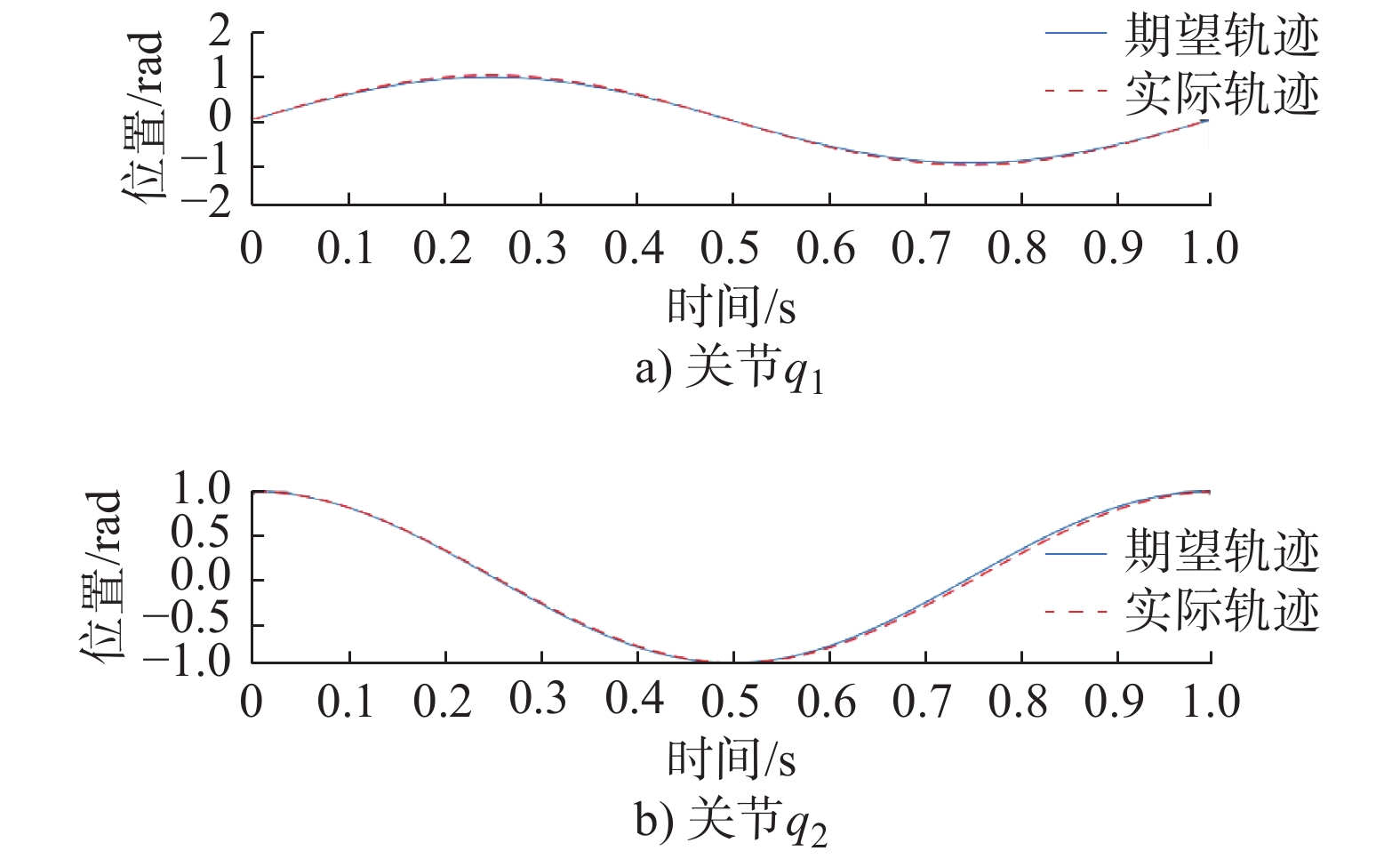
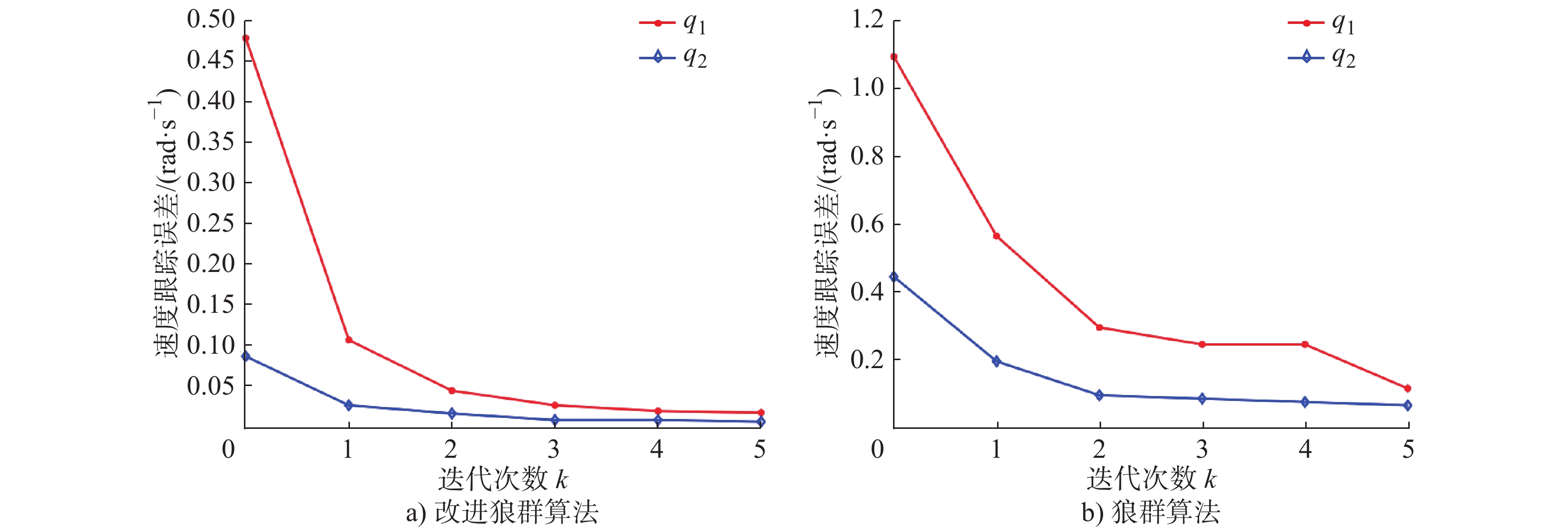
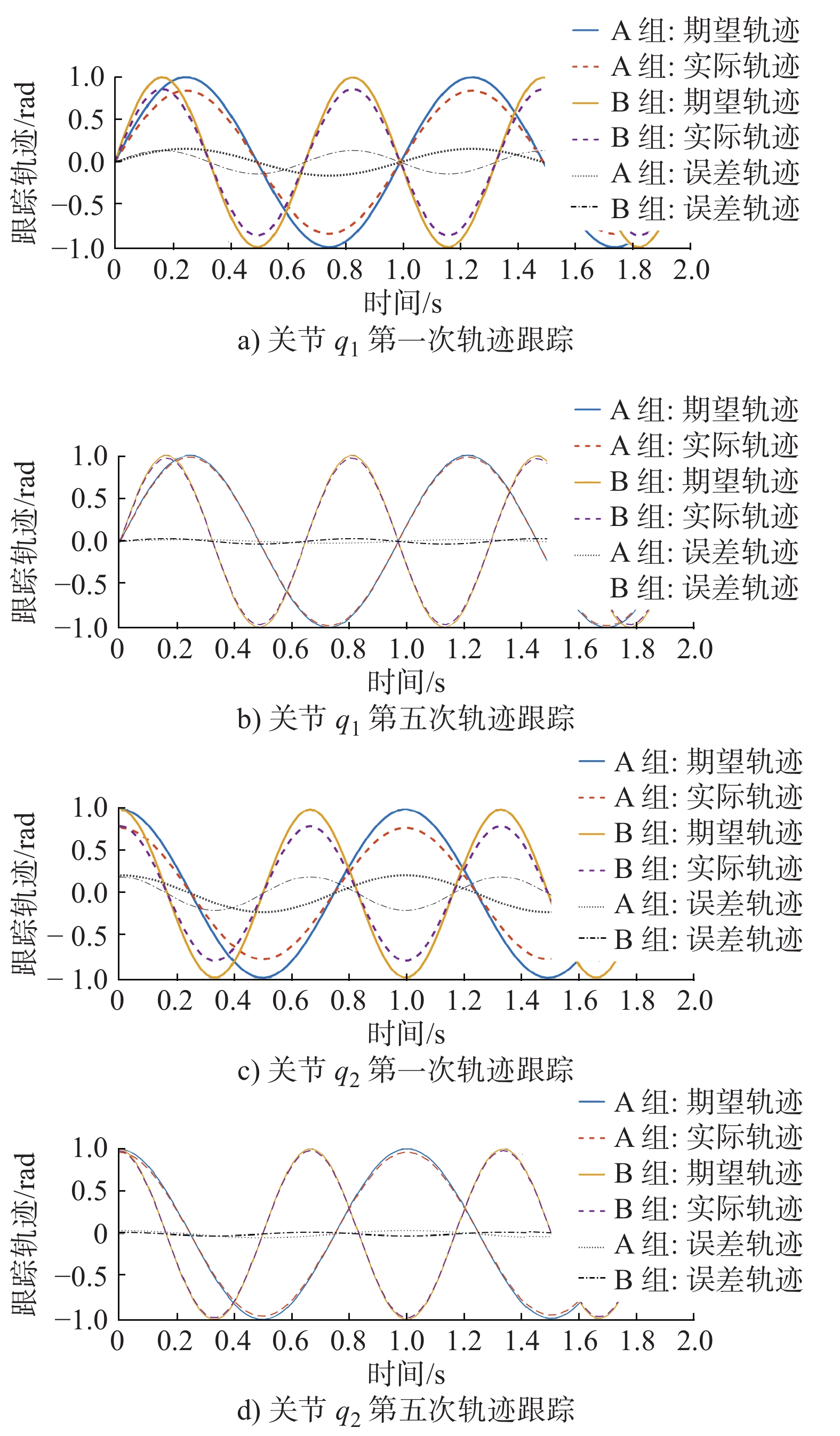
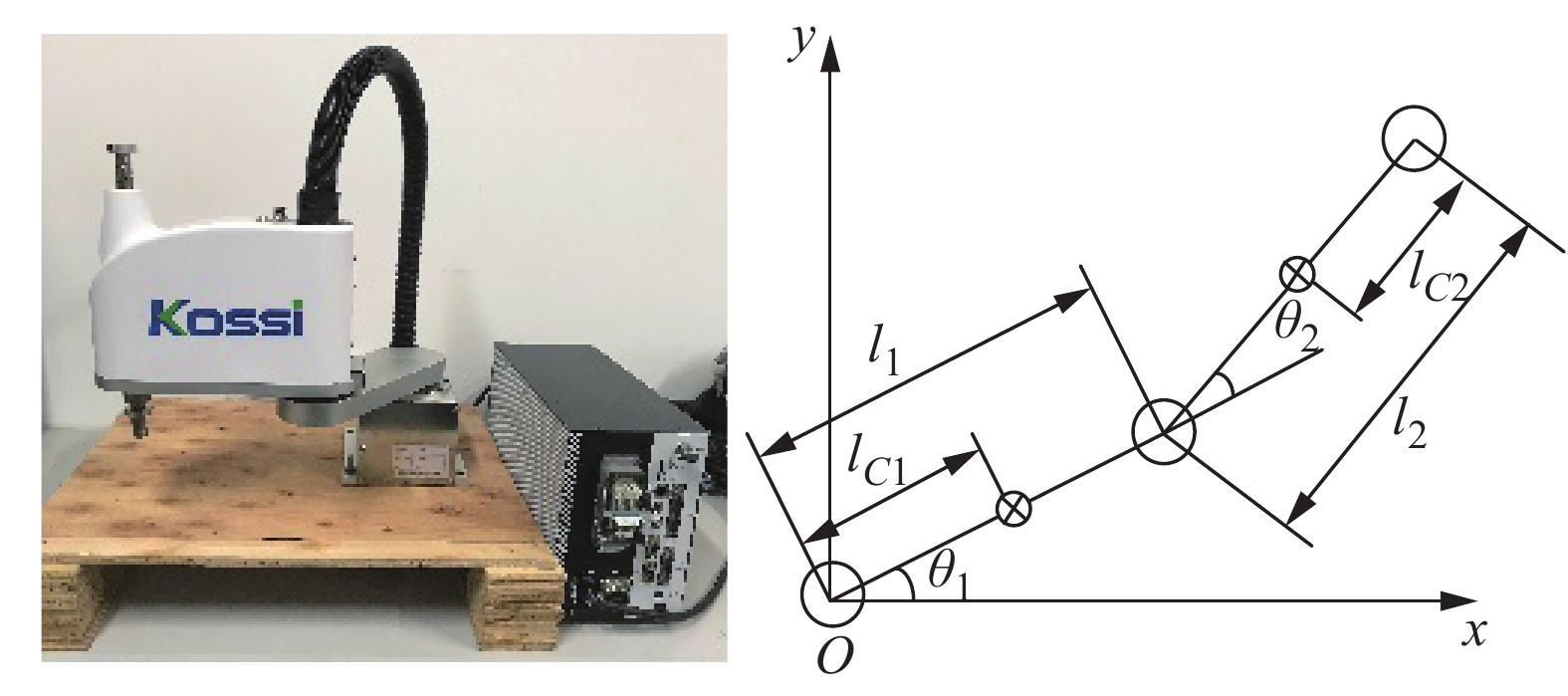
摘要: 针对减小机器人重复运动的位置、速度跟踪误差的问题,给出一种基于狼群算法优化的机械臂自适应迭代学习控制策略。根据SCARA(Selective compliance assembly robot arm)机械臂驱动方程,设计动力学系统的迭代学习控制律。引入自适应步长的狼群算法,使狼群能够根据猎物气味浓度动态调整移动步长,提高了算法的收敛速度和精度。该策略对机械臂控制器参数KP、KD进行寻优时,得到了良好的控制效果,实现了对期望轨迹的有效跟踪。实验结果表明,该算法灵活性好,对系统期望轨迹具有较高的跟踪精度,有效降低了双关节机械臂的位置、速度跟踪误差,具有较强的可行性与有效性。Abstract: Aiming at reducing the position and speed tracking error of robot repetitive motion, an adaptive iterative learning control strategy based on wolf group algorithm is presented in this paper. According to the SCARA (Selective compliance assembly robot arm) manipulator drive equation, the iterative learning control law of the dynamic system is designed. The wolf group algorithm with adaptive step size is introduced to enable the wolf to dynamically adjust the moving step size according to the prey odor concentration, which improves the convergence speed and accuracy. When the strategy optimizes the parameters of the arm controller KP and KD, the result is effect for control and achieves effective tracking of the desired trajectory. The experimental results show that the adaptive control systems has good flexibility, high tracking accuracy for the system's desired trajectory, and effectively reduces the position and velocity tracking error of the double joint manipulator, which has strong feasibility and effectiveness.
-
Key words:
- robots /
- adaptive algorithm /
- wolf pack algorithm /
- adaptive control systems
-
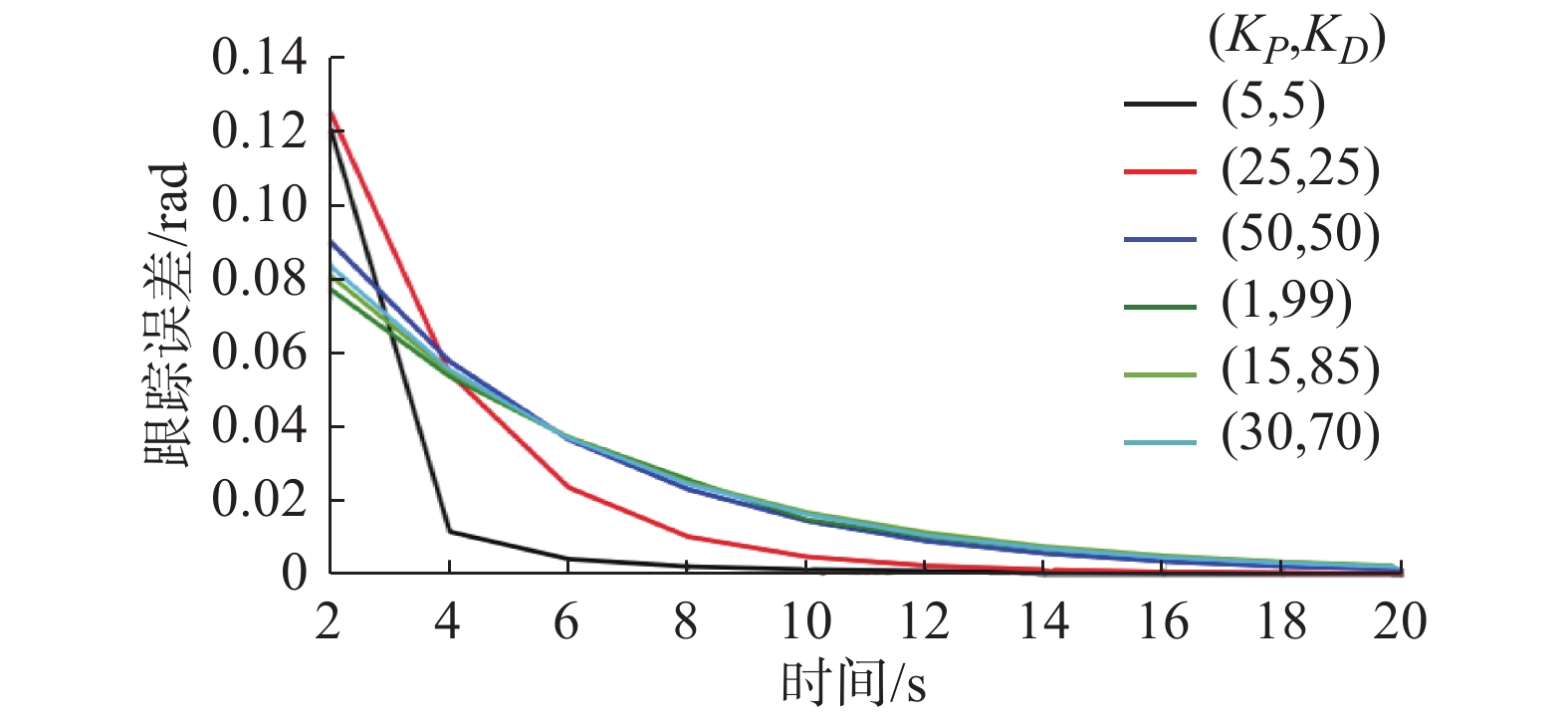
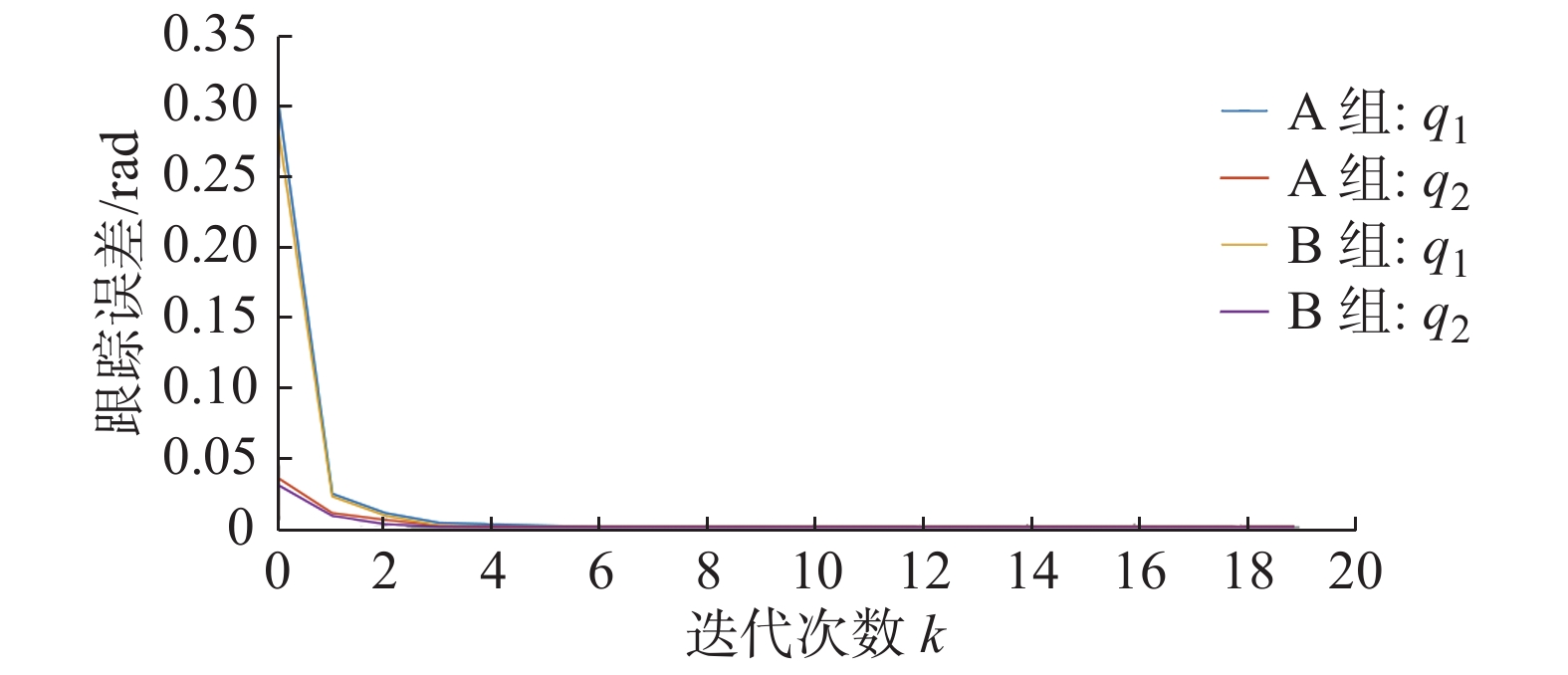
表 1 不同参数设置迭代后的误差数据
(${K_P}$,${K_D}$) 迭代次数 2 4 6 8 10 12 14 16 18 20 (5,5) 0.12080 0.01190 0.00450 0.00250 0.00170 0.00130 0.001 00 0.00080 0.00070 0.00060 (25,25) 0.12517 0.05467 0.02384 0.01058 0.00513 0.00274 0.00165 0.00103 0.00077 0.00065 (50,50) 0.09023 0.05792 0.03681 0.02337 0.01484 0.00938 0.00602 0.00387 0.00253 0.00177 (1,99) 0.07740 0.05380 0.03740 0.026 00 0.01510 0.01050 0.00730 0.00510 0.00360 0.00240 (15,85) 0.08110 0.05497 0.03730 0.02528 0.01711 0.01169 0.00790 0.00541 0.00372 0.00261 (30,70) 0.08370 0.05570 0.03710 0.02480 0.01660 0.01090 0.00740 0.00490 0.00340 0.00230  下载: 导出CSV
下载: 导出CSV
-
[1] 孙琳, 张爱军. EtherCAT实时性对SCARA机器人轨迹精度的影响研究[J]. 自动化仪表, 2018, 39(11): 37-41Sun L, Zhang A J. Research on the influence of EtherCAT real-time performance on the trajectory accuracy of SCARA robot[J]. Process Automation Instrumentation, 2018, 39(11): 37-41 (in Chinese) [2] 李怀政, 陈启愉, 张华伟, 等. 基于ADAMS/Insight的SCARA机器人机构运动可靠性研究[J]. 机械设计与研究, 2018, 34(3): 63-66Li H Z, Chen Q Y, Zhang H W, et al. Analysis of kinematic reliability for SCARA robots mechanism based on ADAMS/Insight[J]. Machine Design & Research, 2018, 34(3): 63-66 (in Chinese) [3] Nasrabadi M S, Sharafi Y, Tayari M. A parallel grey wolf optimizer combined with opposition based learning[C]//Proceedings of 2016 1st Conference on Swarm Intelligence and Evolutionary Computation. Bam, Iran: IEEE, 2016: 18-23 [4] 姚鹏, 王宏伦. 基于改进流体扰动算法与灰狼优化的无人机三维航路规划[J]. 控制与决策, 2016, 31(4): 701-708Yao P, Wang H L. Three-dimensional path planning for UAV based on improved interfered fluid dynamical system and grey wolf optimizer[J]. Control and Decision, 2016, 31(4): 701-708 (in Chinese) [5] 张铁, 梁骁翃. 平面关节型机器人关节力矩的卡尔曼估计[J]. 浙江大学学报, 2018, 52(5): 951-959 doi: 10.3785/j.issn.1008-973X.2018.05.015Zhang T, Liang X H. Kalman filter-based SCARA robot joint torque estimation[J]. Journal of Zhejiang University, 2018, 52(5): 951-959 (in Chinese) doi: 10.3785/j.issn.1008-973X.2018.05.015 [6] 郝晓弘, 周勃. 非线性系统的改进型迭代学习控制算法研究[J]. 机械设计与制造, 2018,(6): 29-32 doi: 10.3969/j.issn.1001-3997.2018.06.008Hao X H, Zhou B. Improved iterative learning control algorithm for nonlinear systems[J]. Machinery Design & Manufacture, 2018,(6): 29-32 (in Chinese) doi: 10.3969/j.issn.1001-3997.2018.06.008 [7] 杨红. 带遗忘因子的PD型迭代学习控制算法研究[J]. 暨南大学学报, 2013, 34(1): 27-30Yang H. PD-type iterative learning control algorithm research with forgetting factor[J]. Journal of Jinan University, 2013, 34(1): 27-30 (in Chinese) [8] 李鹏, 杨杰, 迟洁茹, 等. 二自由度SCARA机器人位置的端口受控哈密顿与反步法协调控制[J]. 测控技术, 2018, 37(3): 41-46 doi: 10.3969/j.issn.1000-8829.2018.03.010Li P, Yang J Chi J R, et al. Position tracking control system of 2-DOF SCARA robot based on the hybrid control of port-controlled Hamiltonian and backstepping[J]. Measurement & Control Technology, 2018, 37(3): 41-46 (in Chinese) doi: 10.3969/j.issn.1000-8829.2018.03.010 [9] 袁静, 王锐, 江力. 多自由度工业机器人基于神经网络的自适应PID控制[J]. 计算机应用, 2017, 37(S1): 123-125, 140Yuan J, Wang R, Jiang L. Neural network PID based adaptive control for industrial welding robot with multi-degree of freedom[J]. Journal of Computer Applications, 2017, 37(S1): 123-125, 140 (in Chinese) [10] 钱美容, 蒋近. CD播放器机械臂轨迹跟踪的鲁棒自适应迭代学习控制[J]. 计算机集成制造系统, 2019, 25(3): 682-691Qian M R, Jiang J. Robust adaptive iterative learning control based on trajectory tracking of cd player arm[J]. Computer Integrated Manufacturing Systems, 2019, 25(3): 682-691 (in Chinese) [11] Ouyang P R, Pano V, Dam T. PID Position domain control for contour tracking[J]. International Journal of Systems Science, 2015, 46(1): 111-124 doi: 10.1080/00207721.2013.775385 [12] Tomei P. Adaptive PD controller for robot manipulators[J]. IEEE Transactions on Robotics and Automation, 1991, 7(4): 565-570 doi: 10.1109/70.86088 [13] 孙继鹏, 孟德元, 杜明骏, 等. 多机械臂的分布式自适应迭代学习控制[J]. 北京航空航天大学学报, 2015, 41(12): 2384-2390Sun J P, Meng D Y, Du M J, et al. Distributed adaptive iterative learning control for multiple robot manipulators[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(12): 2384-2390 (in Chinese) [14] 郭立婷. 基于自适应和变游走方向的改进狼群算法[J]. 浙江大学学报, 2018, 45(3): 284-293Guo L T. Improved wolf pack algorithm based on adaptive step length and adjustable scouting direction[J]. Journal of Zhejiang University, 2018, 45(3): 284-293 (in Chinese) [15] 吴虎胜, 张凤鸣, 吴庐山. 一种新的群体智能算法−狼群算法[J]. 系统工程与电子技术, 2013, 35(11): 2430-2438Wu H S, Zhang F M, Wu L S. New swarm intelligence algorithm− wolf pack algorithm[J]. Systems Engineering and Electronics, 2013, 35(11): 2430-2438 (in Chinese) [16] 惠晓滨, 郭庆, 吴娉娉, 等. 一种改进的狼群算法[J]. 控制与决策, 2017, 32(7): 1163-1172Hui X B, Guo Q, Wu P P, et al. An improved wolf pack algorithm[J]. Control and Decision, 2017, 32(7): 1163-1172 (in Chinese) [17] 汪方正. 基于狼群算法优化的FCM图像自动分割[J]. 控制工程, 2018, 25(9): 1727-1732Wang F Z. Automatic segmentation of FCM image based on the optimization algorithm of wolf swarm pack[J]. Control Engineering of China, 2018, 25(9): 1727-1732 (in Chinese) -






 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 425
- HTML全文浏览量: 441
- PDF下载量: 143
- 被引次数: 0
