




Configuration Design of Single Closed-loop Non-overconstrained Mechanisms with Inactive Joints
-
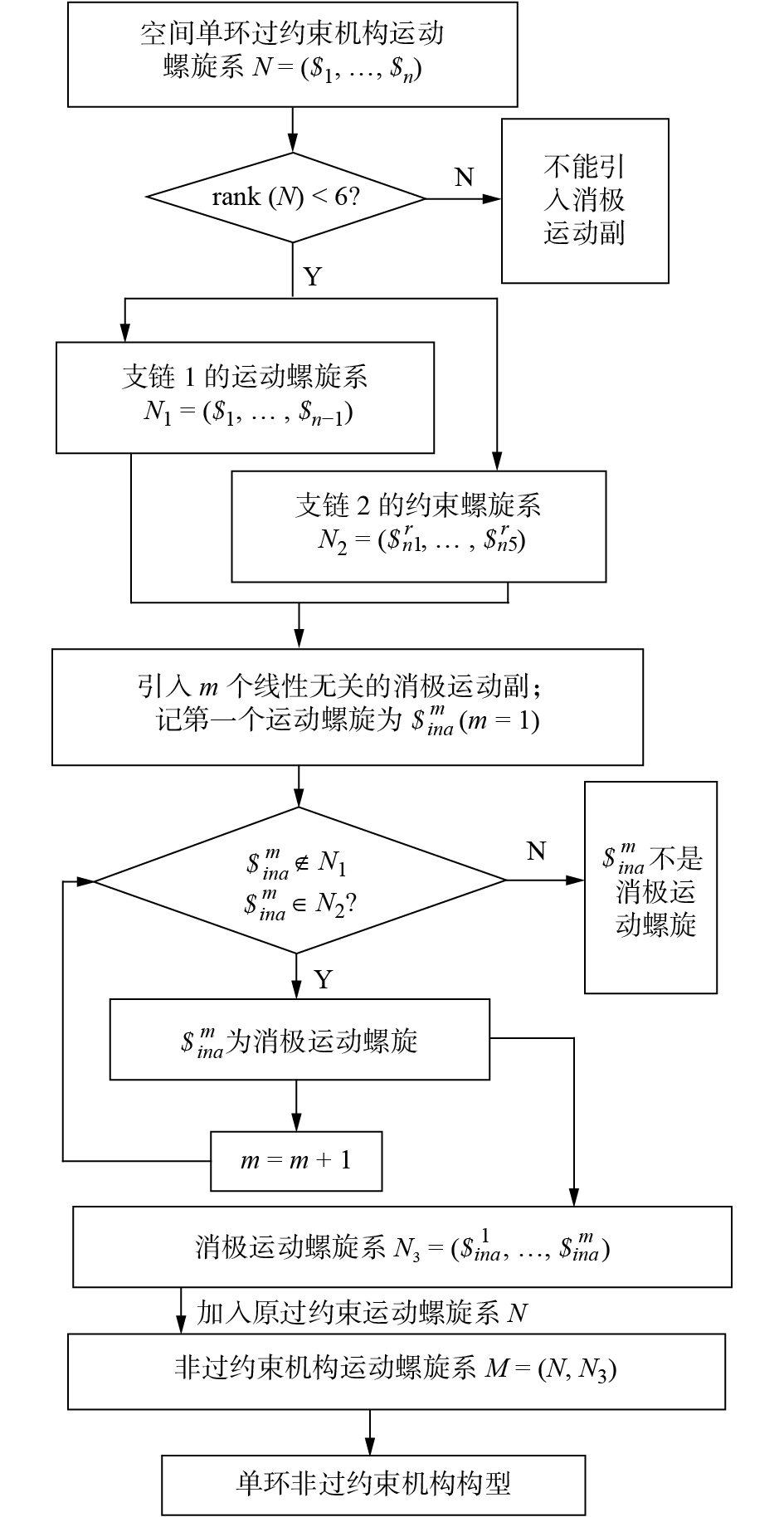
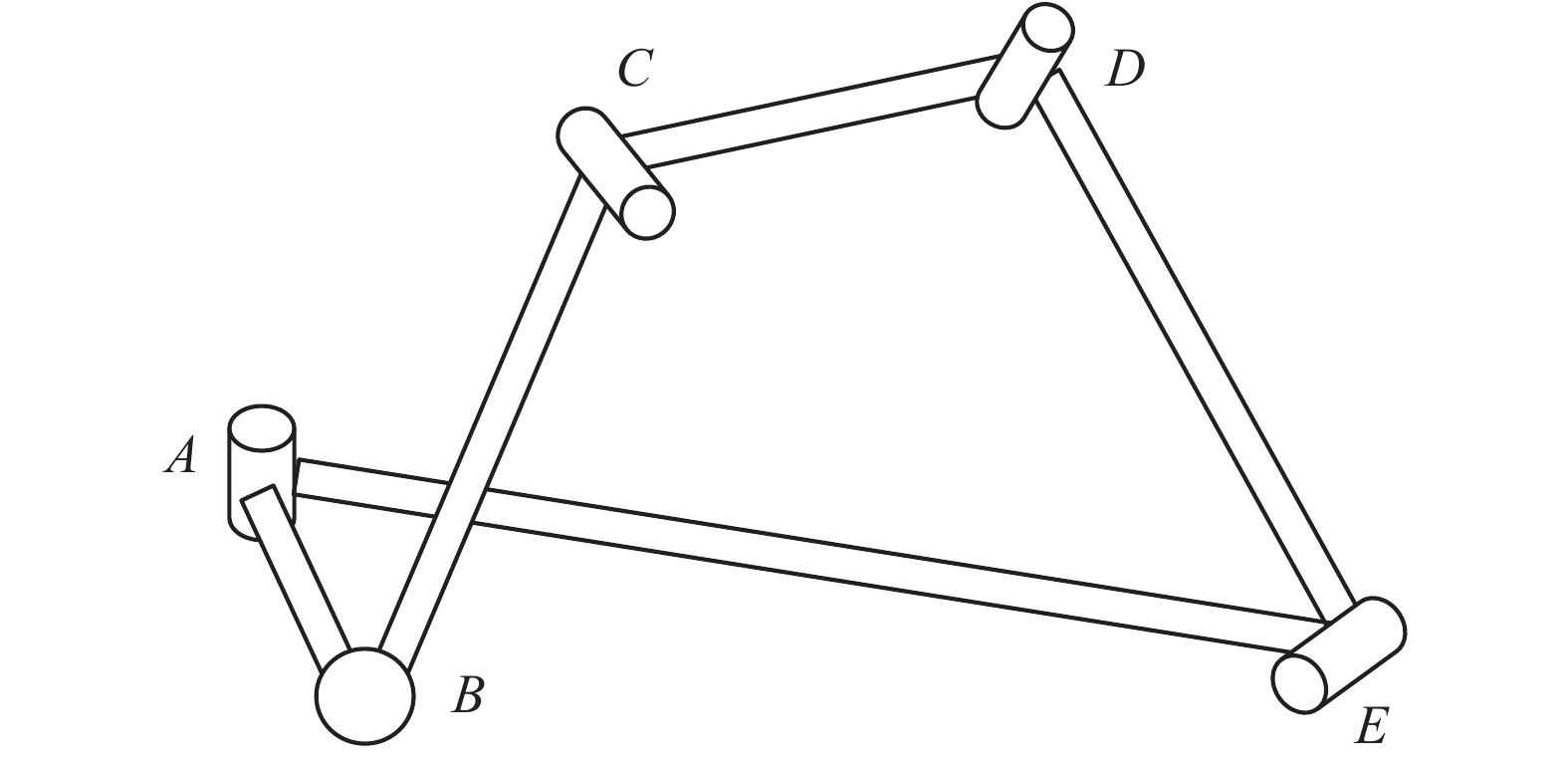
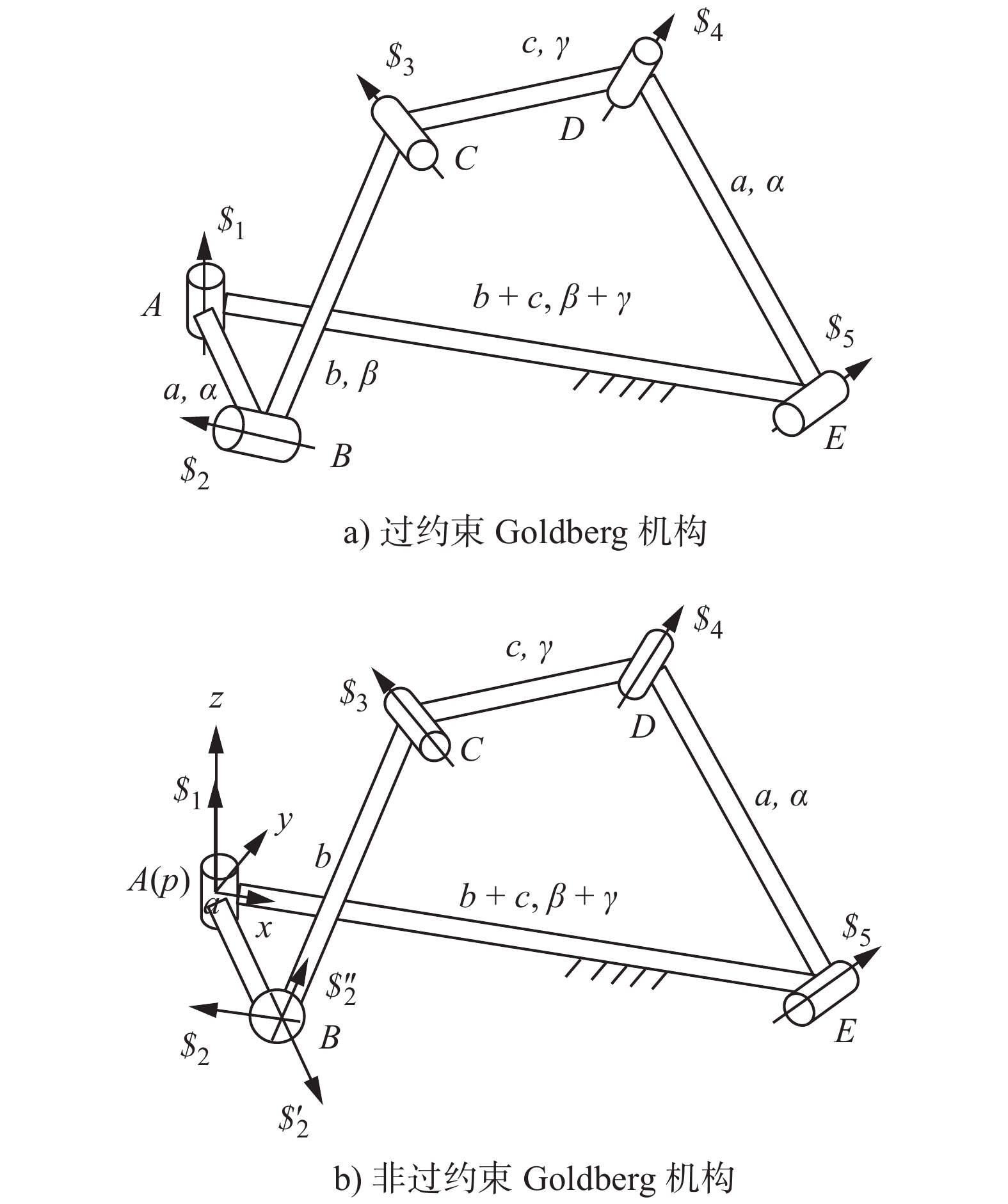
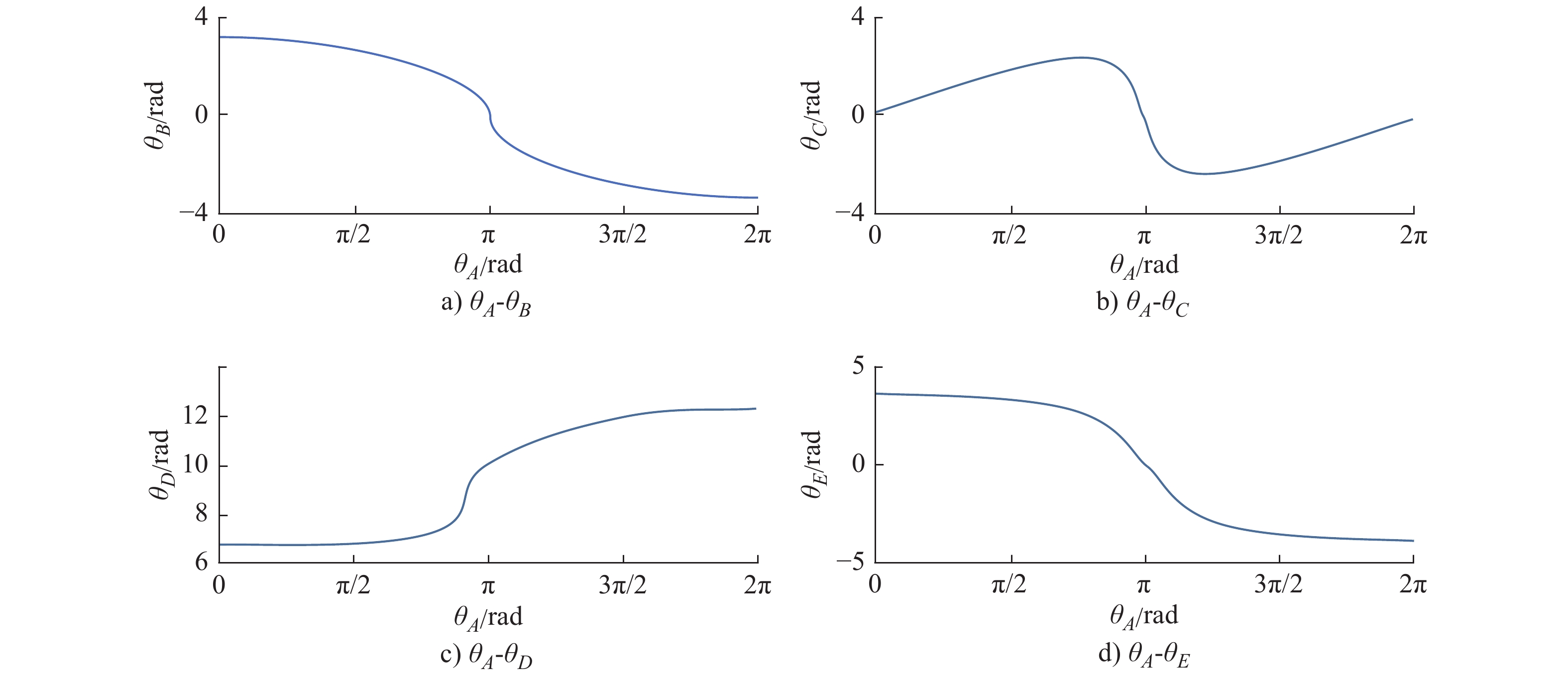
摘要: 为减弱过约束机构中严格的运动副轴线间几何约束关系,降低机构的装配误差和难度,提出一种引入消极运动副的单闭环非过约束机构构型设计方法。给出了引入消极运动副的非过约束机构自由度分析方法、非过约束机构的设计原理及设计流程。针对过约束Goldberg机构,通过在同一转动副中添加2个消极运动副R,得到非过约束Goldberg机构RSRRR。通过螺旋理论证明了过约束/非过约束Goldberg机构在运动学上完全等效,并对非过约束Goldberg机构输入输出运动参数求解,从而验证了本文提出的单闭环非过约束机构构型设计方法的正确性。
-
关键词:
- 非过约束 /
- 消极运动副 /
- 构型设计 /
- Goldberg机构
Abstract: In order to weaken the strict geometric constraint relationship between the axes of the kinematic pairs in the overconstrained mechanism and reduce the assembly error and difficulty of the mechanism, a single closed-loop non-overconstrained mechanism configuration design method with inactive joints is proposed. The degree of freedom analysis method of non-overconstrained mechanism with inactive joints is presented. For overconstrained Goldberg mechanism, the non-overconstrained Goldberg mechanism RSRRR is obtained by adding two inactive joints to a single rotation pair. The screw theory proves that the overconstrained/non-overconstrained Goldberg mechanism is completely equivalent in kinematics, and input and output motion parameters of non-overconstrained Goldberg mechanism is studied, so as to verify the correctness of the single closed-loop configuration design method of the non-overconstrained Goldberg mechanism proposed in this paper.-
Key words:
- non-overconstrained /
- inactive joints /
- configuration design /
- Goldberg mechanism
-
[1] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 2版. 北京: 高等教育出版社, 2014Huang Z, Zhao Y S, Zhao T S. Advanced spatial mechanism[M]. 2nd ed. Beijing: Higher Education Press, 2014 (in Chinese) [2] 道格拉斯·布兰丁. 精密机械设计: 运动学设计原理与实践[M]. 于靖军, 刘辛军, 译. 北京: 机械工业出版社, 2017Blanding D L. Exact constraint: machine design using kinematic principles[M]. Yu J J, Liu X J, trans. Beijing: China Machine Press, 2017 (in Chinese) [3] 马志燕. 曲柄摇杆式剪切机构的优化设计[J]. 机械设计, 2018, 35(7): 57-61Ma Z Y. Optimization design of crank rocker shearing mechanism[J]. Journal of Machine Design, 2018, 35(7): 57-61 (in Chinese) [4] 安培文, 黄茂林. 平面连杆机构的自调及其允差的分析研究[J]. 中国机械工程, 2002, 13(23): 2040-2044 doi: 10.3321/j.issn:1004-132X.2002.23.016An P W, Huang M L. Research on self-adjustment and allowable errors of planar linkage mechanism[J]. China Mechanical Engineering, 2002, 13(23): 2040-2044 (in Chinese) doi: 10.3321/j.issn:1004-132X.2002.23.016 [5] 杨廷力. 机械系统基本理论——结构学·运动学·动力学[M]. 北京: 机械工业出版社, 1996Yang T L. Basic theory of mechanical systems, structure, kinematics, dynamics[M]. Beijing: China Machine Press, 1996 (in Chinese) [6] Yang F F, Chen Y, Kang R J, et al. Truss transformation method to obtain the non-overconstrained forms of 3D overconstrained linkages[J]. Mechanism and Machine Theory, 2016, 102: 149-166 doi: 10.1016/j.mechmachtheory.2016.04.005 [7] 余发国, 高峰, 葛浩. 机构消极自由度的判别与引入方法[J]. 上海交通大学学报, 2008, 42(4): 540-543 doi: 10.3321/j.issn:1006-2467.2008.04.006Yu F G, Gao F, Ge H. Recognizing and introducing method of idle degree of freedoms for mechanisms[J]. Journal of Shanghai Jiaotong University, 2008, 42(4): 540-543 (in Chinese) doi: 10.3321/j.issn:1006-2467.2008.04.006 [8] Lee C C, Hervé J M. Uncoupled actuation of overconstrained 3T-1R hybrid parallel manipulators[J]. Robotica, 2009, 27(1): 103-117 doi: 10.1017/S0263574708004554 [9] 黄真, 刘婧芳, 李艳文. 论机构自由度——寻找了150年的自由度通用公式[M]. 北京: 科学出版社, 2011Huang Z, Liu J F, Li Y W. On the degree of freedom-the general formula of the degree of freedom which has been searched for 150 years[M]. Beijing: Science Press, 2011 (in Chinese) [10] Song X K, Guo H W, Liu S J, et al. Cable-truss hybrid double-layer deployable mechanical network constructed of Bennett linkages and planar symmetric four-bar linkages[J]. Mechanism and Machine Theory, 2019, 133: 459-480 doi: 10.1016/j.mechmachtheory.2018.12.003 [11] Wohlhart K. Merging two general Goldberg 5R linkages to obtain a new 6R space mechanism[J]. Mechanism and Machine Theory, 1991, 26(7): 659-668 doi: 10.1016/0094-114X(91)90028-3 [12] Alizade R I, Kiper G, Bağdadioğlu B, et al. Function synthesis of Bennett 6R mechanisms using Chebyshev approximation[J]. Mechanism and Machine Theory, 2014, 81: 62-78 doi: 10.1016/j.mechmachtheory.2014.06.010 [13] Kong X W. Type synthesis of single-loop overconstrained 6R spatial mechanisms for circular translation[J]. Journal of Mechanisms and Robotics, 2014, 6(4): 041016 doi: 10.1115/1.4028130 [14] Song C Y, Chen Y. A spatial 6R linkage derived from subtractive Goldberg 5R linkages[J]. Mechanism and Machine Theory, 2011, 46(8): 1097-1106 doi: 10.1016/j.mechmachtheory.2011.03.006 [15] 黄真, 夏平, 丁华锋. Bennett机构自由度的螺旋分析[J]. 燕山大学学报, 2004, 28(3): 189-191 doi: 10.3969/j.issn.1007-791X.2004.03.001Huang Z, Xia P, Ding H F. Analysis of DOF Bennett mechanism using screw theory[J]. Journal of Yanshan University, 2004, 28(3): 189-191 (in Chinese) doi: 10.3969/j.issn.1007-791X.2004.03.001 [16] Craig J J. 机器人学导论[M]. 贠超, 译. 3版. 北京: 机械工业出版社, 2006Craig J J. Introduction to robotics mechanics and control[M]. Yun C, trans. 3rd ed. Beijing: China Machine Press, 2006 (in Chinese) [17] 刘勇, 许勇, 宋伟, 等. 对称3T1R并联机构构型设计与位置分析[J]. 机械设计与研究, 2019, 35(2): 55-59Liu Y, Xu Y, Song W, et al. Configuration design and position analysis of symmetrical 3T1R parallel mechanisms[J]. Machine Design & Research, 2019, 35(2): 55-59 (in Chinese) [18] 程颖, 杨德华, 吴常铖, 等. 新型六自由度微动并联机构的工作空间分析[J]. 机械科学与技术, 2019, 38(3): 433-439Cheng Y, Yang D H, Wu C C, et al. Workspace analysis of a novel six DOFs parallel mechanism with micro displacement[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(3): 433-439 (in Chinese) -

 下载:
下载:


 点击查看大图
点击查看大图

图(7)
计量
- 文章访问数: 246
- HTML全文浏览量: 83
- PDF下载量: 31
- 被引次数: 0
