




Design and Simulation Analysis of Magnetic Field of a Four-stable State Digital Electromagnetic Actuator Array
-
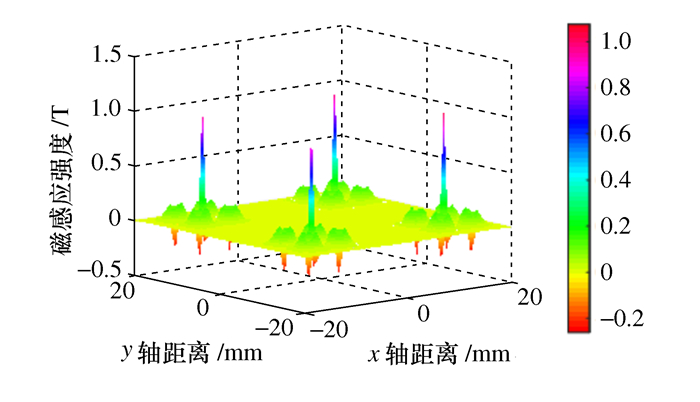
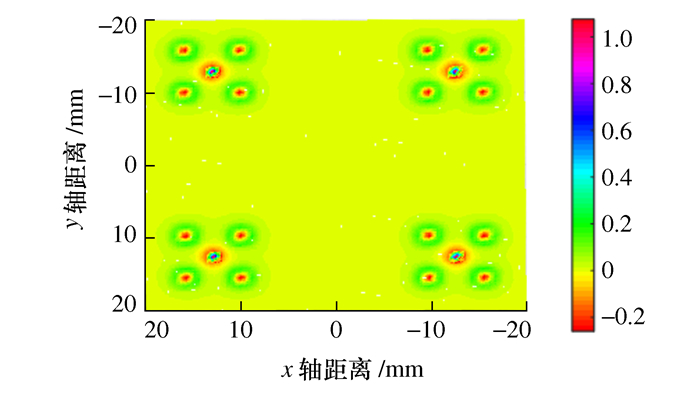
摘要: 为了消除模拟执行器中安装反馈传感器造成的空间局限性对系统紧凑性设计需求带来负面影响和多磁体环境下空间静磁力耦合计算复杂等问题,应用电磁驱动原理设计并静态模拟分析了一种新型四稳态数字电磁执行器阵列,绘制阵列结构的磁通密度空间分布图,并基于Furlani空间磁感应方程进行阵列系统空间磁场建模,提出了新型多磁体间快速静磁耦合计算方法(单重叠加法)。模拟对比结果表明,单重叠加法的模型(即Matlab模型)与系统校验模型(即Radia模型)相比,单磁体所受静磁合力最大误差仅为2.94%;与传统计算方法(多重叠加法)相比,单重叠加法计算效率提高约65.82%,有较好的准确性和高效性;执行器阵列空间磁通密度分布具有均匀性、一致性和独立性。Abstract: In order to eliminate the negative impact of space limitation caused by the installation of feedback sensors in analog actuators due to compact design requirements and the complex magnetic coupling calculation problem in a multi-magnet environment, a new four-stable state digital electromagnetic actuator array is designed by using the electromagnetic drive principle and the spatial distribution of magnetic induction intensity of the actuator array and then analyzed. Based on the Furlani space magnetic induction equation, the modeling of the actuator array is carried out, and a new fast magnetostatic coupling calculation method (single overlap addition) between multiple magnets is proposed. Compared with the check model (i.e., the Radia model) of the actuator array, the single overlap adding model (i.e., the MATLAB model) has a maximum magnetostatic force error of only 2.94%. Compared with the traditional calculation method, the accuracy and efficiency of the single overlap adding calculation method improves by about 65.82%. The actuator array's spatial flux density distribution is uniform, consistent, and independent.
-
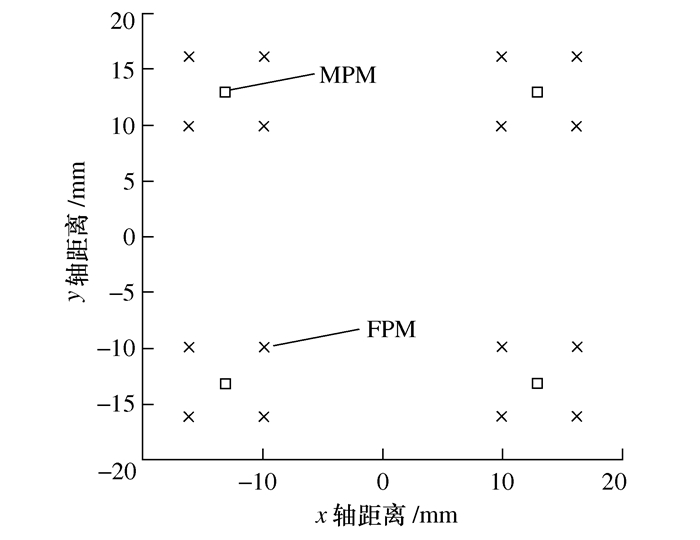
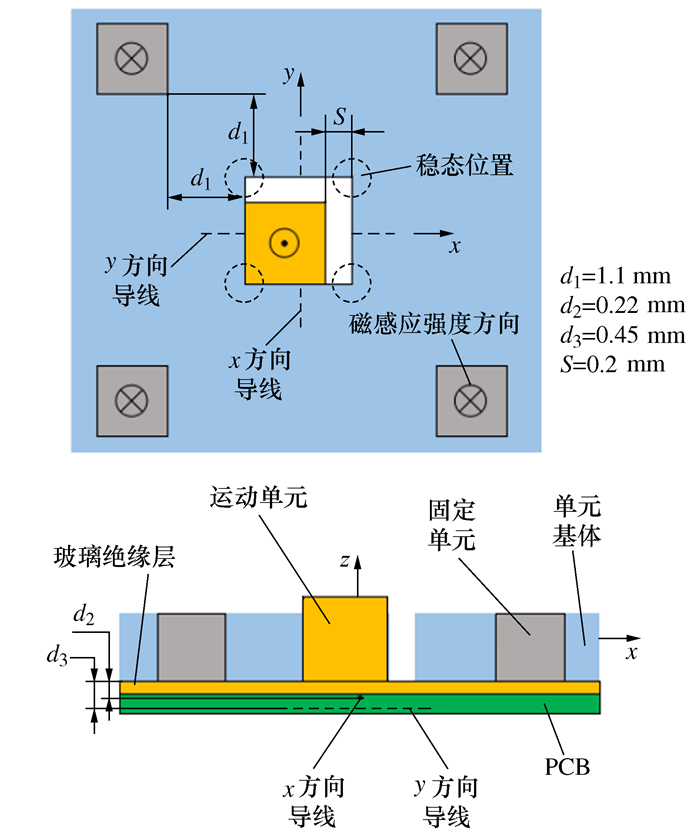
表 1 执行器单元设计参数
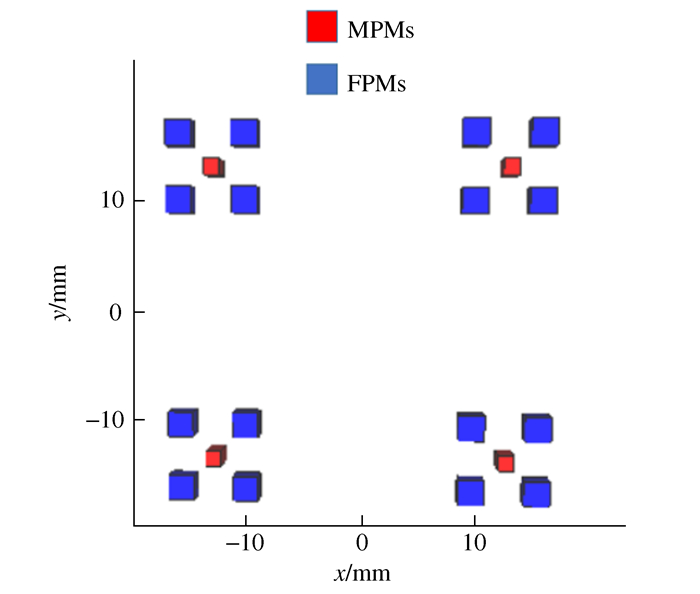
磁铁种类 尺寸参数 磁化强度 MPM 1.33 mm×1.33 mm×2 mm 1.33 T FPM 2.5 mm×2.5 mm×1.25 mm 0.6 T  下载: 导出CSV
下载: 导出CSV
表 2 Mathematica模拟结果的ITF
执行器 x方向力/N y方向力/N 合力/N 1 -1.08×10-5 1.08×10-5 1.53×10-5 2 1.08×10-5 -1.08×10-5 1.53×10-5 3 -1.08×10-5 1.08×10-5 1.53×10-5 4 1.08×10-5 -1.08×10-5 1.53×10-5
下载: 导出CSV
表 3 Mathematica模拟结果的ATF
执行器 x方向力/N y方向力/N 合力/N 1 -1.65×10-3 -1.72×10-3 2.41×10-3 2 -1.72×10-3 -1.65×10-3 2.41×10-3 3 -1.65×10-3 -1.72×10-3 2.41×10-3 4 -1.72×10-3 -1.65×10-3 2.41×10-3
下载: 导出CSV
表 5 Matlab模拟结果的ITF
执行器 x方向力/N y方向力/N 合力/N 1 -1.08×10-5 1.08×10-5 1.53×10-5 2 1.08×10-5 -1.08×10-5 1.53×10-5 3 -1.08×10-5 1.08×10-5 1.53×10-5 4 1.08×10-5 -1.08×10-5 1.53×10-5
下载: 导出CSV
表 6 Matlab模拟结果的ATF
执行器 x方向力/N y方向力/N 合力/N 1 -1.63×10-3 -1.72×10-3 2.37×10-3 2 -1.72×10-3 -1.72×10-3 2.43×10-3 3 -1.63×10-3 -1.63×10-3 2.31×10-3 4 -1.72×10-3 -1.63×10-3 2.37×10-3
下载: 导出CSV
表 9 Mathematica和Matlab中模拟结果ATF误差
执行器 x方向力/N y方向力/N 合力/N 1 2×10-5 0 4×10-5 2 0 7×10-5 2×10-5 3 2×10-5 0 1×10-4 4 0 2×10-5 4×10-5
下载: 导出CSV
表 10 Mathematica和Matlab模拟结果中TOF误差
执行器 误差值/N 误差/% 1 1×10-5 0.42 2 5×10-5 2.52 3 7×10-5 2.94 4 1×10-5 0.42
下载: 导出CSV
-
[1] 张磊.微执行器的应用研究[J].机械制造与自动化, 2010, 39(2):151-153 http://d.old.wanfangdata.com.cn/Periodical/jxzzyzdh201002046Zhang L. Research on application of micro actuators[J]. Machine Building & Automation, 2010, 39(2):151-153(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxzzyzdh201002046 [2] 邢继春, 刘德春, 任文迪.压电式触觉反馈执行器发展综述[J].压电与声光, 2018, 40(4):619-625 http://d.old.wanfangdata.com.cn/Periodical/ydysg201804033Xing J C, Liu D C, Ren W D. Review of development of piezoelectric tactile feedback actuator[J]. Piezoelectrics & Acoustooptics, 2018, 40(4):619-625(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ydysg201804033 [3] 杨斌堂, 徐彭有, 孟光, 等.大行程精密定位超磁致伸缩驱动器的设计与控制[J].机械工程学报, 2012, 48(1):25-31 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201201005Yang B T, Xu P Y, Meng G, et al. Design and control of giant magnetostrictive actuator for long-stroke precision positioning[J]. Journal of Mechanical Engineering, 2012, 48(1):25-31(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201201005 [4] Muthuveeran G, Velusamy V, Kaliaperumal D. Electro-mechanical logic gates using shape memory alloy actuator[C]//Proceedings of the; 6th International Conference on New Actuators. Bremen, Germany: VDE, 2018: 1-4 [5] Jain R K, Saha S, Ghosh B. A piezoelectric actuator based compact micro-manipulation system for robotic assembly[M]//Pande S S, Dixit U S. Precision Product-Process Design and Optimization. Singapore: Springer, 2018: 73-97 [6] 杨文珍, 许艳, 吴新丽, 等.盲文显示装置的研究进展[J].浙江理工大学学报, 2015, 33(5):660-668 http://d.old.wanfangdata.com.cn/Periodical/zjgcxyxb201505016Yang W Z, Xu Y, Wu X L, et al. Research progress of braille display device[J]. Journal of Zhejiang Sci-Tech University, 2015, 33(5):660-668(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zjgcxyxb201505016 [7] 蔡向朝, 王战玺, 孙启彰, 等.可配置模块化工业机器人运动控制系统研究[J].机械科学与技术, 2018, 37(5):760-766 doi: 10.13433/j.cnki.1003-8728.20180073Cai X C, Wang Z X, Sun Q Z, et al. Research on configurable modular motion control system of industrial robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(5):760-766(in Chinese) doi: 10.13433/j.cnki.1003-8728.20180073 [8] Petit L. Contribution aux techniques d'actionnement numérique: cas d'un système électromagnétique 2D[D]. Professeur des Universités, 2009 [9] Furlani E P. Permanent magnet and electromechanical devices:materials, analysis, and applications[M]. Waltham:Academic Press, 2001 [10] Gerson Y, Krylov S, Ilic B, et al. Design considerations of a large-displacement multistable micro actuator with serially connected bistable elements[J]. Finite Elements in Analysis and Design, 2012, 49(1):58-69 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a72193a668e501dcd869acfddc6bca28 [11] Chalvet V, Haddab Y, Lutz P. A microfabricated planar digital microrobot for precise positioning based on bistable modules[J]. IEEE Transactions on Robotics, 2013, 29(3):641-649 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1a5b8a3b9c1d47ce5ffa976bacaf7914 [12] Henke M, Gerlach G. Mono-and bi-stable planar actuators for stiffness control driven by shape memory alloys[J]. Sensors and Actuators A:Physical, 2016, 238:95-103 doi: 10.1016/j.sna.2015.11.021 [13] 晋宏炎, 鞠晓君, 辛涛, 等.偏置磁场对超磁致伸缩致动器输出特性的影响分析[J].传感技术学报, 2017, 30(12):1862-1868 http://d.old.wanfangdata.com.cn/Periodical/cgjsxb201712014Jin H Y, Ju X J, Xin T, et al. Effect of bias magnetic field on output characteristics of giant magnetostrictive actuator[J]. Chinese Journal of Sensors and Actuators, 2017, 30(12):1862-1868(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/cgjsxb201712014 [14] 胡俊峰, 郝亚洲, 徐贵阳, 等.一种新型微操作平台的精确运动控制[J].机械科学与技术, 2016, 35(2):216-221 doi: 10.13433/j.cnki.1003-8728.2016.0210Hu J F, Hao Y Z, Xu G Y, et al. Precision motion control of a novel micro-manipulation stage[J]. Mechanical Science and Technology, 2016, 35(2):216-221(in Chinese) doi: 10.13433/j.cnki.1003-8728.2016.0210 [15] 杨晓京, 彭芸浩, 李尧.压电微位移台的动态迟滞建模及实验验证[J].光学 精密工程, 2016, 24(9):2255-2261 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201609021Yang X J, Peng Y H, Li Y. Dynamic hysteresis modeling and experimental verification of piezoelectric positioning stage[J]. Optics and Precision Engineering, 2016, 24(9):2255-2261(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201609021 [16] Huyan P. Réseau d'actionneurs électromagnétiques numériques: caractérisation d'une application de type convoyage et conception optimisée[D]. 2015 -





 点击查看大图
点击查看大图
图(12) / 表(12)
计量
- 文章访问数: 197
- HTML全文浏览量: 190
- PDF下载量: 20
- 被引次数: 0
