




Improved Adjacency Matrix Description and Isomorphism Identification of Kinematic Chain with Multiple Joints
-
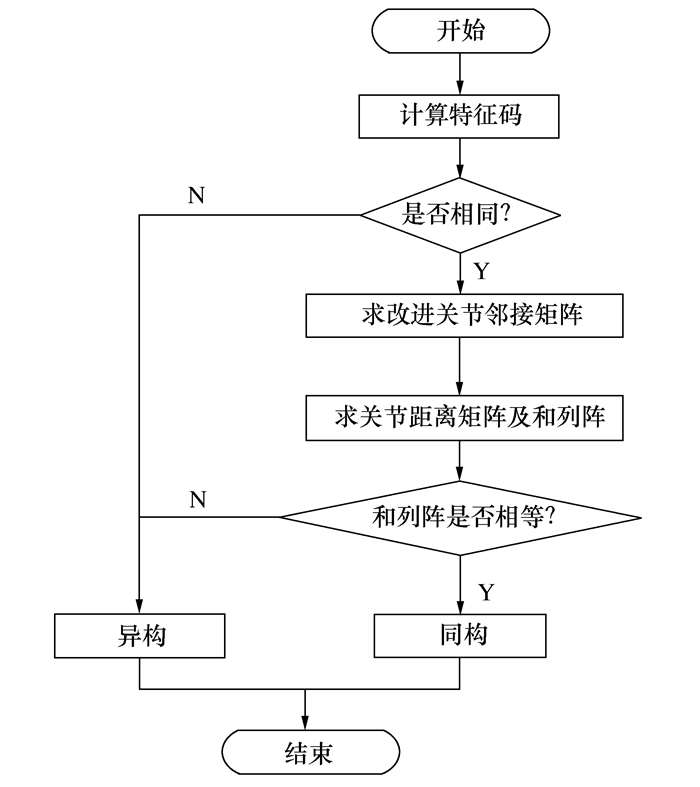
摘要: 运动链的同构判定是一个较为复杂的问题,对于机构的型综合具有重大意义。本文中提出了一种含复铰运动链的描述及同构判定的新方法。首先,针对运动链中复合铰链难以分析、识别的问题,提出了一种改进关节邻接矩阵描述含复铰运动链的方法;接着,用特征码表示运动链的基本特征,作为同构的必要条件;然后,通过改进关节邻接矩阵构造了关节距离矩阵,并得到该矩阵的和列阵。通过判断特征码、和列阵两个结构恒量是否相等来判定运动链是否同构。最后,通过案例验证了该方法的有效性和可靠性。Abstract: The isomorphism identification of a kinematic chain is a complex problem, which is of great significance to the type synthesis of mechanisms. In this paper, a new method for describing and identifying the isomorphism of a kinematic chain with multiple joints is presented. Firstly, because of the difficulty in analyzing and recognizing multiple joints in a kinematic chain, an improved joint adjacency matrix is proposed to describe the kinematic chain with multiple joints. Then, the basic features of the kinematic chain are represented by feature codes because they are necessary conditions for isomorphism. Further, the joint distance matrix is constructed with the improved joint adjacency matrix, and its summation array is obtained. By distinguishing whether the structural constants of the feature codes and the summation array are equal, the isomorphism of the kinematic chain is identified. Finally, the validity and reliability of the method is verified with numerical examples.
-
[1] Ding H F, Huang Z. A unique representation of the kinematic chain and the atlas database[J]. Mechanism and Machine Theory, 2007, 42(6):637-651 doi: 10.1016/j.mechmachtheory.2006.06.010 [2] Ding H F, Huang Z. A new theory for the topological structure analysis of kinematic chains and its applications[J]. Mechanism and Machine Theory, 2007, 42(10):1264-1279 doi: 10.1016/j.mechmachtheory.2006.11.007 [3] Ding H F, Huang Z. Isomorphism identification of graphs:especially for the graphs of kinematic chains[J]. Mechanism and Machine Theory, 2009, 44(1):122-139 doi: 10.1016/j.mechmachtheory.2008.02.008 [4] 伍星华, 聂松辉.平面运动链同构识别的全等环路法[J].机械科学与技术, 2009, 28(2):205-209 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxkxyjs200902015Wu X H, Nie S H. Congruent loop approach to isomorphism identification of planar kinematic chains[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(2):205-209(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxkxyjs200902015 [5] Sun W, Kong J Y, Sun L B. The improved hamming number method to detect isomorphism for kinematic chain with multiple joints[J]. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2017, 11(5):JAMDSM0061 doi: 10.1299/jamdsm.2017jamdsm0061 [6] Rai R K, Punjabi S. A new algorithm of links labelling for the isomorphism detection of various kinematic chains using binary code[J]. Mechanism and Machine Theory, 2019, 131:1-32 doi: 10.1016/j.mechmachtheory.2018.09.010 [7] 丁玲, 路懿.运动链拓扑图的特征数组表示及同构判断[J].机械工程学报, 2010, 46(7):63-67 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201007010Ding L, Lu Y. Character arrays representation and isomorphism identification of kinematic chain topology graphs[J]. Journal of Mechanical Engineering, 2010, 46(7):63-67(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201007010 [8] 罗贤海.机构运动链邻接矩阵的素数表示与同构判别[J].机械工程学报, 2013, 49(5):24-31 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201305004Luo X H. Prime representation and isomorphism identification of mechanism kinematic chains via the adjacent matrix[J]. Journal of Mechanical Engineering, 2013, 49(5):24-31(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201305004 [9] 周豪, 孔建益, 孙亮波, 等.加值矩阵对平面含复铰运动链描述与同构判定[J].机械科学与技术, 2018, 37(5):657-662 doi: 10.13433/j.cnki.1003-8728.2018.0501Zhou H, Kong J Y, Sun L B, et al. Representation and isomorphism identification of planar kinematic chains with multiple joints on value-added matrix[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(5):657-662(in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0501 [10] Lohumi M K, Mohammad A, Khan I A. A computerized loop based approach for identification of isomorphism and type of mobility in planar kinematic chains[J]. Sadhana, 2015, 40(2):335-350 doi: 10.1007/s12046-015-0344-z [11] Zeng K H, Fan X G, Dong M C, et al. A fast algorithm for kinematic chain isomorphism identification based on dividing and matching vertices[J]. Mechanism and Machine Theory, 2014, 72:25-38 doi: 10.1016/j.mechmachtheory.2013.09.011 [12] Galán-Marín G, López-Rodríguez D, Mérida-Casermeiro E. A new multivalued neural network for isomorphism identification of kinematic chains[J]. Journal of Computing and Information Science in Engineering, 2010, 10(1):011009 doi: 10.1115/1.3330427 [13] 冯春, 陈永.基于遗传算法的机构运动链同构识别[J].机械工程学报, 2001, 37(10):27-30 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200110006Feng C, Chen Y. Mechanism kinematics chain isomorphism identification based on genetic algorithms[J]. Chinese Journal of Mechanical Engineering, 2001, 37(10):27-30(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200110006 [14] Yang P, Zeng K H, Li C Q, et al. An improved hybrid immune algorithm for mechanism kinematic chain isomorphism identification in intelligent design[J]. Soft Computing, 2015, 19(1):217-223 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=99e35a38d95f3ab36dfcb02993a8d48e [15] Rai R K, Punjabi S. Kinematic chains isomorphism identification using link connectivity number and entropy neglecting tolerance and clearance[J]. Mechanism and Machine Theory, 2018, 123:40-65 doi: 10.1016/j.mechmachtheory.2018.01.013 [16] 王静平, 李俊萍.基于蚁群算法的机构同构判定的研究[J].机械科学与技术, 2010, 29(8):1112-1115, 1120 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxkxyjs201008030Wang J P, Li J P. An algorithm for mechanism isomorphism identification based on ant colony algorithm[J]. Mechanical Science and Technology for Aerospace Engineering, 2010, 29(8):1112-1115, 1120(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxkxyjs201008030 -

 下载:
下载:

 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 114
- HTML全文浏览量: 89
- PDF下载量: 17
- 被引次数: 0
